JP5267848B2 - モータ制御装置 - Google Patents
モータ制御装置 Download PDFInfo
- Publication number
- JP5267848B2 JP5267848B2 JP2008105968A JP2008105968A JP5267848B2 JP 5267848 B2 JP5267848 B2 JP 5267848B2 JP 2008105968 A JP2008105968 A JP 2008105968A JP 2008105968 A JP2008105968 A JP 2008105968A JP 5267848 B2 JP5267848 B2 JP 5267848B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- command value
- current command
- axis current
- rotor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
- Control Of Ac Motors In General (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Description
そこで、この発明の目的は、弱め磁束制御に起因するロータ推定位置精度の低下を抑制し、これにより、モータのスムーズな駆動を阻害することなくセンサレス駆動方式と弱め磁束制御との併用を可能とするモータ制御装置を提供することである。
I d * ≧(K−ωφ)÷(ωL d ) ……(A)
ただし、Kは誘起電圧変化からロータ回転位置を所要精度で推定できるように予め定める電圧閾値、ωはロータの回転角速度、φは界磁によるステータ巻線鎖交磁束数最大値の√(3/2)、L d はd軸インダクタンスである。
なお、括弧内の英数字は後述の実施形態における対応構成要素等を表す。以下、この項において同じ。
dq座標におけるモータの電圧方程式は、次の式(B)および(C)によって与えられる。このうち、式(C)の第2項および第3項の和である(ωLdId *+ωφ)の値が小さいと、誘起電圧変化を検出しにくくなり、モータをスムーズに駆動することが困難になる。

Vqはq軸電圧、
Rはステータ巻線抵抗、
ωはロータの回転角速度、
Ldはd軸インダクタンス
Lqはq軸インダクタンス
Id *はd軸電流指令値、
Iq *はq軸電流指令値、
φは界磁によるステータ巻線鎖交磁束数最大値の√(3/2)である。
そこで、誘起電圧変化から必要な精度でロータ回転位置を推定できるように電圧閾値Kを定め、次式(D)を満たすようにしておけば、弱め磁束制御が行われるときでも、モータ誘起電圧に基づくロータ回転位置の推定に支障がない。この式(D)をd軸電流指令値Id *について解くと、前記式(A)が得られる。
図1は、この発明の一実施形態に係るモータ制御装置を適用した電動パワーステアリング装置の電気的構成を説明するためのブロック図である。この電動パワーステアリング装置は、車両のステアリングホイールに加えられる操舵トルクを検出するトルクセンサ1と、車両の舵取り機構2に操舵補助力を与えるモータ3(電動モータ)と、このモータ3を駆動制御するモータ制御装置5とを備えている。モータ制御装置5は、トルクセンサ1が検出する操舵トルクに応じてモータ3を駆動することによって、操舵状況に応じた適切な操舵補助を実現する。
マイクロコンピュータ7は、CPUおよびメモリ(ROMおよびRAMなど)を備えており、所定のプログラムを実行することによって、複数の機能処理部として機能するようになっている。この複数の機能処理部には、電流指令値生成部11と、PI(比例積分)制御部12と、指示電圧生成部13と、γδ/αβ座標変換部14と、αβ/UVW座標変換部15と、PWM制御部16と、UVW/αβ座標変換部17と、αβ/γδ座標変換部18と、偏差演算部19と、位置推定部20と、角速度演算部21とを備えている。
Id *=0 ……(1)
Iq *=−(3/2)1/2・I* ……(2)
したがって、電流指令値生成部11は、d軸電流指令値Id *=0を生成する一方で、トルクセンサ1によって検出される操舵トルクに応じたq軸電流指令値Iq *を生成するように動作する。より具体的には、操舵トルクに対応したq軸電流指令値Iq *を記憶したマップ(テーブル)を用いてq軸電流指令値Iq *が生成されるようになっていてもよい。モータ3が発生するトルクは、モータ電流に対応するから、電流指令値Idq *は、モータ3から発生させるべきトルクを指令するための「トルク指令値」と言い換えることもできる。
電流指令値生成部11の動作の詳細は後述するが、この実施形態では、電流指令値生成部11は、角速度演算部21よって演算されるモータ回転角速度ωを加味して、電流指令値Idq *を設定するようになっている。
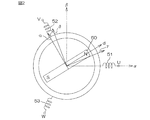
UVW/αβ座標変換部17は、三相検出電流IUVWを、二相固定座標系(α−β)上での電流IαおよびIβ(以下、これらをまとめていうときには「二相検出電流Iαβ」という。)に座標変換する。二相固定座標系(α−β)とは、ロータ50の回転中心を原点として、ロータ50の回転平面内にα軸およびこれに直交するβ軸を定めた固定座標系である(図2参照)。座標変換された二相検出電流Iαβは、αβ/γδ座標変換部18に与えられる。
αβ/UVW座標変換部15は、α軸指示電圧Vα *およびβ軸指示電圧Vβ *を三相固定座標系の指示電圧、すなわち、U相、V相およびW相の指示電圧VU *,VV *,VW *(以下、これらをまとめていうときには「三相指示電圧VUVW *」という。)に変換する。
このような構成によって、舵取り機構2に結合された操作部材としてのステアリングホイール(図示せず)に操舵トルクが加えられると、これがトルクセンサ1によって検出される。そして、その検出された操舵トルクに応じた電流指令値Idq *が電流指令値生成部11によって生成される。この電流指令値Idq *と二相検出電流Iγδとの偏差が偏差演算部19によって求められ、この偏差を零に導くようにPI制御部12によるPI演算が行われる。この演算結果に対応した二相指示電圧Vγδ *が指示電圧生成部13によって生成され、これが、座標変換部14,15を経て三相指示電圧VUVW *に変換される。そして、PWM制御部16の働きによって、その三相指示電圧VUVW *に応じたデューティ比で駆動回路8が動作することによって、モータ3が駆動され、電流指令値Idq *に対応したアシストトルクが舵取り機構2に与えられることになる。こうして、操舵トルクに応じて操舵補助を行うことができる。電流センサ9によって検出される三相検出電流IUVWは、座標変換部17,18を経て、電流指令値Idq *に対応するように二相回転座標系(γ−δ)で表された二相検出電流Iγδに変換された後に、偏差演算部19に与えられる。
位置推定部20は、サンプリング周期Ts(=1/fs)ごとに、UVW/αβ座標変換部17から与えられる二相検出電流Iαβと、γδ/αβ座標変換部14によって生成される二相指示電圧Vαβ *とに基づいて、ロータ50の回転位置を推定し、推定回転位置θ^を生成する。
図3は、位置推定部20の構成を説明するためのブロック図である。位置推定部20は、信号処理部31と、ロータ位置推定部32とを備えている。信号処理部31は、二相指示電圧Vαβ *の高周波成分を除去する低域通過フィルタで構成された電圧フィルタ33と、二相検出電流Iαβの高周波成分を除去する低域通過フィルタで構成された電流フィルタ34とを有している。ロータ位置推定部32には、信号処理部31によって信号処理(フィルタリング)された後の二相指示電圧Vαβ *および二相検出電流Iαβが与えられるようになっている。ロータ位置推定部32は、モータ3の数学モデルであるモータモデルに基づき、モータ3の誘起電圧を外乱として推定する外乱オブザーバ35と、この外乱オブザーバ35が出力する推定誘起電圧から高周波成分を除去する低域通過フィルタで構成された推定値フィルタ36と、この推定値フィルタ36が出力する推定誘起電圧(フィルタリング後の値)に基づいて、ロータ50の推定回転位置θ^を生成する推定位置生成部37とを有している。そして、電圧フィルタ33によってフィルタリングされた二相指示電圧Vαβ *と、電流フィルタ34によってフィルタリングされた二相検出電流Iαβとが、ロータ位置推定部32の外乱オブザーバ35にそれぞれ入力されるようになっている。
誘起電圧Eαβは、次式(3)で表すことができる。ただし、KEは誘起電圧定数、θはロータ回転位置、ωはロータ回転速度である。
φは界磁によるステータ鎖交磁束から計算されるdq座標上の磁束
(すなわち、界磁のU相、V相、W相ステータ巻線鎖交磁束数最大値の√(3/2))
ωはモータの電気角における回転角速度
Ldはd軸インダクタンス
Lqはq軸インダクタンス
Vlimは正弦波駆動が可能なdq座標での制限電圧
αは正の定数
である。
図6は、弱め磁束制御を行うときの電流指令値生成部11の動作を説明するためのフローチャートである。電流指令値生成部11は、図5の特性L2+,L2-に従って、モータ回転角速度ωに対応する上限値Iq_uplimおよび下限値Iq_downlimを設定する(ステップS1)。さらに、電流指令値生成部11は、操舵トルク等に応じてq軸電流指令値Iq *を設定する(ステップS2)。
次に、電流指令値生成部11は、前記式(7)に従って、d軸電流指令値Id *(負値)を設定する(ステップS7)。さらに、電流指令値生成部11は、d軸電流指令値Id *と前記式(8)のd軸電流上限値Id_limit(負値)とを比較する(ステップS8)。もしも、d軸電流指令値Id *がd軸電流上限値Id_limitよりも小さければ(絶対値が大きければ)(ステップS8:YES)、このd軸電流指令値Id *に制限が加えられる。すなわち、その後の制御に用いるためのd軸電流指令値Id *としてd軸電流上限値Id_limitが代入される(ステップS9)。一方、d軸電流指令値Id *がd軸電流上限値Id_limit以上であれば(ステップS8:NO)、前記式(7)に従って設定されたd軸電流指令値Id *がそのまま用いられる。
図7は、正弦波駆動のためにd軸電圧指令値Vd *とq軸電圧指令値Vq *とに課される条件を示す図である。電動モータ3の各相の電圧が正弦波となるようにするためには、各相電圧の振幅を電源電圧Ed(駆動回路8に印加される電圧。バッテリ電圧で代用してもよい。)の1/2以下とする必要があり、d軸電圧Vdおよびq軸電圧Vqに関して、次式(9)が成立する必要がある。
一方、定常状態でのq軸電圧Vqおよびd軸電圧Vdは、次式(dq座標におけるモータの電圧方程式)のように表される。
A>0は自明であり、前記式(15)よりC>0であるので、次式(17)および(18)のとおりとなる。
一方、前記式(11)の第2項および第3項の和、すなわち、ωLdId *+ωφが小さい場合には、位置推定部20における位置推定精度が悪くなる。そこで、この実施形態では、電圧閾値Kを用いて、下記式(20)が成立するように、d軸電流指令値Id *を制限し、弱め磁束制御に制限をかけるようにしている。電圧閾値Kは、誘起電圧変化からロータ回転位置を所要精度で推定できる値に設定される。
これをd軸電流指令値Id *について解くと、次式(21)が得られる。
Id *≦(K−ωφ)/(ωLd)=Id_limit …… (21)
図6におけるステップS8,S9の処理は、d軸電流指令値Id *に対してこのような制限をかけるための処理である。
Claims (1)
- ロータと、このロータに対向するステータとを備えたモータを制御するためのモータ制御装置であって、
前記ロータの回転によって生じるモータ誘起電圧を検出するモータ誘起電圧検出手段と、
このモータ誘起電圧検出手段によって検出されたモータ誘起電圧に基づいて、前記ロータの回転位置を求める位置推定手段と、
前記ロータの界磁を弱めて前記モータの出力を増加するための弱め磁束制御を行う弱め磁束制御手段と、
この弱め磁束制御手段による弱め磁束制御に対して制限を加える制限手段とを含み、
前記モータ制御装置は、dq座標上のd軸電流およびq軸電流を制御するものであり、
前記制限手段は、d軸電流指令値I d * を、次式(A)を満たす範囲に制限するものである、モータ制御装置。
I d * ≧(K−ωφ)÷(ωL d ) ……(A)
ただし、Kは誘起電圧変化からロータ回転位置を所要精度で推定できるように予め定める電圧閾値、ωはロータの回転角速度、φは界磁によるステータ巻線鎖交磁束数最大値の√(3/2)、L d はd軸インダクタンスである。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008105968A JP5267848B2 (ja) | 2008-04-15 | 2008-04-15 | モータ制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008105968A JP5267848B2 (ja) | 2008-04-15 | 2008-04-15 | モータ制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009261103A JP2009261103A (ja) | 2009-11-05 |
| JP2009261103A5 JP2009261103A5 (ja) | 2011-10-27 |
| JP5267848B2 true JP5267848B2 (ja) | 2013-08-21 |
Family
ID=41387804
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008105968A Expired - Fee Related JP5267848B2 (ja) | 2008-04-15 | 2008-04-15 | モータ制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5267848B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7167167B2 (ja) | 2018-01-26 | 2022-11-08 | インターナショナル・ビジネス・マシーンズ・コーポレーション | 受動電気デバイスを形成する方法、インダクタ構造体および受動電気デバイス |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102010038295A1 (de) * | 2010-07-22 | 2012-01-26 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur sensorlosen Lageerkennung einer elektronisch kommutierten elektrischen Maschine |
| DE102013211020A1 (de) * | 2013-06-13 | 2014-12-18 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Betreiben eines elektronisch kommutierten Stellmotors sowie Stellgebersystem mit einem Stellmotor |
| CN103701375B (zh) * | 2013-12-31 | 2016-09-07 | 深圳市汇川技术股份有限公司 | 一种永磁同步电机启动系统、方法及永磁同步电机 |
| JP6497895B2 (ja) * | 2014-11-17 | 2019-04-10 | シャープ株式会社 | 同期モータの制御装置 |
| WO2016121751A1 (ja) * | 2015-01-28 | 2016-08-04 | 株式会社 東芝 | インバータ制御装置及びモータ駆動システム |
| JP6500224B2 (ja) * | 2015-04-23 | 2019-04-17 | パナソニックIpマネジメント株式会社 | モータ駆動装置およびこれを用いた洗濯機又は洗濯乾燥機 |
| KR102205254B1 (ko) * | 2017-04-27 | 2021-01-21 | 현대모비스 주식회사 | 전동식 파워 스티어링 시스템의 모터 제어 장치 및 방법 |
| CN108448977B (zh) * | 2018-03-26 | 2020-01-31 | 杭州先途电子有限公司 | 一种直流电机弱磁控制方法及装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3146791B2 (ja) * | 1993-08-10 | 2001-03-19 | トヨタ自動車株式会社 | 永久磁石型同期モータの駆動制御装置 |
| JP4007345B2 (ja) * | 2004-06-29 | 2007-11-14 | アイシン・エィ・ダブリュ株式会社 | 電動駆動制御装置、電動駆動制御方法及びプログラム |
| JP2006129632A (ja) * | 2004-10-29 | 2006-05-18 | Matsushita Electric Ind Co Ltd | 電動機駆動装置 |
| JP4609078B2 (ja) * | 2005-01-24 | 2011-01-12 | パナソニック株式会社 | 電動機駆動装置およびこれを用いた空気調和機 |
| JP2007259650A (ja) * | 2006-03-24 | 2007-10-04 | Aisin Aw Co Ltd | 電動駆動制御装置及び電動駆動制御方法 |
-
2008
- 2008-04-15 JP JP2008105968A patent/JP5267848B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7167167B2 (ja) | 2018-01-26 | 2022-11-08 | インターナショナル・ビジネス・マシーンズ・コーポレーション | 受動電気デバイスを形成する方法、インダクタ構造体および受動電気デバイス |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009261103A (ja) | 2009-11-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5435252B2 (ja) | 車両用操舵装置 | |
| JP5267848B2 (ja) | モータ制御装置 | |
| JP5273451B2 (ja) | モータ制御装置 | |
| JP5130031B2 (ja) | 永久磁石モータの位置センサレス制御装置 | |
| JP4654217B2 (ja) | 永久磁石モータの弱め界磁制御装置及びそれを用いた電動パワーステアリング | |
| JP4881635B2 (ja) | 永久磁石モータのベクトル制御装置 | |
| EP2779415A2 (en) | Motor control system to compensate for torque ripple | |
| JP5176420B2 (ja) | ブラシレスモータのセンサレス制御装置 | |
| JP4879649B2 (ja) | 電動機の制御装置 | |
| JP4712585B2 (ja) | 電動機の制御装置 | |
| JP5168536B2 (ja) | モータ制御装置 | |
| JP5267843B2 (ja) | 電動パワーステアリング装置 | |
| JP2010029028A (ja) | モータ制御装置 | |
| JP5170505B2 (ja) | モータ制御装置 | |
| JP5252190B2 (ja) | モータ制御装置 | |
| JP5273465B2 (ja) | モータ制御装置 | |
| JP6166601B2 (ja) | モータ制御装置及び発電機制御装置 | |
| WO2018047524A1 (ja) | モータ制御方法、モータ制御システムおよび電動パワーステアリングシステム | |
| JP5392530B2 (ja) | モータ制御装置 | |
| JP2008236990A (ja) | モータ制御装置 | |
| JP2010178609A (ja) | モータ制御装置 | |
| JP2009100544A (ja) | モータ制御装置 | |
| JP5228435B2 (ja) | インバータ制御装置とその制御方法 | |
| JP2011109874A (ja) | モータ制御装置および車両用操舵装置 | |
| WO2017130842A9 (ja) | モータ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110216 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110901 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110905 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121024 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121025 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121219 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130411 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130424 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5267848 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |