JP5273451B2 - モータ制御装置 - Google Patents
モータ制御装置 Download PDFInfo
- Publication number
- JP5273451B2 JP5273451B2 JP2008164561A JP2008164561A JP5273451B2 JP 5273451 B2 JP5273451 B2 JP 5273451B2 JP 2008164561 A JP2008164561 A JP 2008164561A JP 2008164561 A JP2008164561 A JP 2008164561A JP 5273451 B2 JP5273451 B2 JP 5273451B2
- Authority
- JP
- Japan
- Prior art keywords
- rotor
- rotational position
- motor
- voltage
- current
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Landscapes
- Power Steering Mechanism (AREA)
- Control Of Electric Motors In General (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Description
一方、レゾルバの代わりに、ロータに取り付けられた磁石の軸方向の漏れ磁束を検出するホール素子その他の磁気センサを回転センサとして用いれば、コストの削減を図ることができる。
前記回転位置推定手段は、さらに、前記回転位置推定手段は、モータの誘起電圧に基づいてロータ回転位置を推定する手段(42)を含むものであってもよい。
図1は、この発明の一実施形態に係るモータ制御装置を適用した電動パワーステアリング装置(車両用操舵装置の一例)の電気的構成を説明するためのブロック図である。この電動パワーステアリング装置は、車両を操向するための操作部材としてのステアリングホイール10に加えられる操舵トルクを検出するトルクセンサ1と、車両の舵取り機構2に操舵補助力を与えるモータ3(電動モータ)と、ステアリングホイール10の回転角である操舵角を検出する舵角センサ4と、モータ3を駆動制御するモータ制御装置5と、当該電動パワーステアリング装置が搭載された車両の速度を検出する車速センサ6と、モータ3に備えられたロータの回転角を検出する磁気センサとしてのホール素子20とを備えている。

UVW/αβ座標変換部17は、三相検出電流IUVWを、二相固定座標系上での電流IαおよびIβ(以下、これらをまとめていうときには「二相検出電流Iαβ」という。)に座標変換する。二相固定座標系とは、ロータ50の回転中心を原点としてα軸およびこれに直交するβ軸を定めた固定座標系である(図2参照)。座標変換された二相検出電流Iαβは、αβ/γδ座標変換部18に与えられる。
PWM制御部16は、三相の指示電圧VU *,VV *,VW *に応じて制御されたデューティ比の駆動信号を生成して駆動回路8に与える。これにより、モータ3の各相には、該当する相の指示電圧VU *,VV *,VW *に応じたデューティ比で電圧が印加されることになる。
位置補正部30には、ホール素子20の出力信号と、位置推定部21によって推定される推定回転位置とが与えられている。ホール素子20は、図3に図解的に示すように、ロータ50のマグネット50mとステータ55とのギャップ56に対向する位置に設けられ、両者間の漏れ磁束57を検出するように配置されている。ロータ50が回転することによって、ホール素子20の位置における漏れ磁束57の磁束密度が変化する。これに応じて、ホール素子20は、ロータ50の回転位置に応じた信号を出力することになる。
回転速度演算部22は、位置補正部30から所定の制御周期T毎に与えられる制御回転位置θ^の差分Δθ^を求めることにより、ロータ50の回転速度ω(=Δθ^)を生成する。
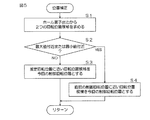
位置補正部30は、ホール素子20の出力信号に基づいて2つの回転位置候補θc1,θc2を求める(図5のステップS1)。さらに、位置補正部30は、求められた2つの回転位置候補θc1,θc2のうち、位置推定部21によって求められた推定回転位置θeに近い方の1つの回転位置候補を制御回転位置θ^として生成する(ステップS2:NO。ステップS3)。この制御回転位置θ^が、座標変換部14,18における座標変換演算のために用いられる。
そして、位置推定部21によって求められる推定回転位置θeをそのまま用いる場合に比較すると、推定演算の誤差εの影響がないので、正確なロータ回転位置情報に基づいて、モータ3をスムーズに回転させることができる。
図6は、位置推定部21の構成を説明するためのブロック図である。位置推定部21は、モータ3に流れるモータ電流(この実施形態では二相検出電流Iαβ)と、モータ3に印加されるモータ電圧(この実施形態では二相指示電圧Vαβ)とに基づいて、ロータ50の回転位置を推定するものである。この位置推定部21は、低速域位置推定部41と、高速域位置推定部42と、切換え部43とを備えている。
したがって、電流ベクトルの大きさは、ロータ50のN極方向およびS極方向において極大値を有する。すなわち、電圧ベクトルの大きさが図8(b)のように変化するのに対して、電流ベクトルの大きさは、図8(a)に示すように、その1周期中に、2つの極大値を有する。この場合、電圧ベクトルの大きさが十分に大きければ、ステータの磁気飽和の影響により、ロータ50のN極側の方がS極側よりもインダクタンスが小さくなり、N極方向の電流ベクトルの大きさが最大値をとることになる(曲線L1参照)。
θL=Tan-1(Vβ */Vα *) …(3)
図9は、高速域位置推定部42の構成例を示すブロック図である。高速域位置推定部42は、信号処理部48と、ロータ位置推定部49とを備えている。信号処理部48は、二相指示電圧Vαβの高周波成分を除去する低域通過フィルタで構成された電圧フィルタ31と、二相検出電流Iαβの高周波成分を除去する低域通過フィルタで構成された電流フィルタ32とを有している。ロータ位置推定部49には、信号処理部48によって信号処理(フィルタリング)された後の二相指示電圧Vαβおよび二相検出電流Iαβが与えられるようになっている。ロータ位置推定部49は、モータ3の数学モデルであるモータモデルに基づき、モータ3の誘起電圧を外乱として推定する外乱オブザーバ25と、この外乱オブザーバ25が出力する推定誘起電圧から高周波成分を除去する低域通過フィルタで構成された推定値フィルタ26と、この推定値フィルタ26が出力する推定誘起電圧(フィルタリング後の値)に基づいて、ロータ50の高速推定回転位置θHを生成する推定位置生成部27とを有している。そして、信号処理部48の電圧フィルタ31によってフィルタリングされた二相指示電圧Vαβと、電流フィルタ32によってフィルタリングされた二相検出電流Iαβとが、ロータ位置推定部49の外乱オブザーバ25にそれぞれ入力されるようになっている。
誘起電圧Eαβは、次の(4)式で表すことができる。ただし、KEは誘起電圧定数、θはロータ回転位置、ωはロータ回転速度である。
また、探査用高周波電圧は、前述の実施形態では、三相指示電圧VUVWに重畳しているが、指示電圧生成部13が生成する指示電圧Vγδやγδ/αβ座標変換部14が生成する二相指示電圧Vαβに重畳する構成としてもよい。
その他、特許請求の範囲に記載された事項の範囲で種々の設計変更を施すことが可能である。
Claims (1)
- ロータと、このロータに対向するステータとを備えたモータを制御するためのモータ制御装置であって、
ロータに取り付けられた磁石の回転軸方向への漏れ磁束を検出し、ロータの回転位置に応じた信号を出力し、その出力信号から2つの回転位置候補が得られる、ただ一つの磁気センサと、
モータ電流およびモータ電圧に基づいてロータの回転位置を推定する回転位置推定手段と、
前記磁気センサの出力信号から得られる2つの回転位置候補のうち、前記回転位置推定手段による推定結果に近いほうの回転位置候補を、ロータの回転位置として特定する回転位置特定手段とを含み、
前記回転位置推定手段は、前記ステータに十分に大きな高周波電圧のセンシング信号を印加して前記ロータに取り付けられた磁石のN極に対応した電流ベクトルの極大を特定しておき、その後は前記ステータに大きさを小さくした高周波電圧のセンシング信号を注入するとともに、電流ベクトルの極大値に基づいてロータ回転位置を推定する手段を含む、モータ制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008164561A JP5273451B2 (ja) | 2008-06-24 | 2008-06-24 | モータ制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008164561A JP5273451B2 (ja) | 2008-06-24 | 2008-06-24 | モータ制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010011543A JP2010011543A (ja) | 2010-01-14 |
| JP2010011543A5 JP2010011543A5 (ja) | 2012-01-26 |
| JP5273451B2 true JP5273451B2 (ja) | 2013-08-28 |
Family
ID=41591358
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008164561A Expired - Fee Related JP5273451B2 (ja) | 2008-06-24 | 2008-06-24 | モータ制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5273451B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015027558A1 (zh) * | 2013-08-30 | 2015-03-05 | 中山大洋电机制造有限公司 | 一种应用单个霍尔传感器的三相直流无刷电机的控制方法 |
| CN108900120A (zh) * | 2018-07-09 | 2018-11-27 | 西北工业大学 | 永磁无刷电机霍尔位置传感器容错控制方法 |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102010003096A1 (de) * | 2010-03-22 | 2011-09-22 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Ermittlung einer aktuellen Winkelposition eines drehbaren magnetischen Bauteils in einem elektrischen Antrieb |
| FR2984637B1 (fr) * | 2011-12-20 | 2013-11-29 | IFP Energies Nouvelles | Procede de determination de la position et de la vitesse d'un rotor d'une machine electrique synchrone |
| US10717040B2 (en) | 2012-08-30 | 2020-07-21 | Element 1 Corp. | Hydrogen purification devices |
| ITTO20130129A1 (it) | 2013-02-15 | 2014-08-16 | Magna Closures Spa | Sistema e metodo per controllare un motore elettrico senza spazzole in corrente continua a pilotaggio sinusoidale per un attuatore di potenza automobilistico |
| JP6104021B2 (ja) * | 2013-04-05 | 2017-03-29 | 三菱電機株式会社 | 交流回転機の制御装置 |
| CN104518714A (zh) * | 2013-10-08 | 2015-04-15 | 英飞凌科技股份有限公司 | 用于永磁同步电机的旋转变压器校准 |
| KR102293569B1 (ko) * | 2014-04-07 | 2021-08-26 | 삼성전자주식회사 | 모터 구동 장치 및 그 제어방법 |
| JP6467621B2 (ja) * | 2014-09-24 | 2019-02-13 | パナソニックIpマネジメント株式会社 | ブラシレスdcモータの駆動装置およびそれを搭載した換気送風装置 |
| JP2016136803A (ja) * | 2015-01-23 | 2016-07-28 | 株式会社デンソー | 回転電機の制御システム |
| DE102016201074B4 (de) * | 2016-01-26 | 2020-07-09 | Baumüller Nürnberg GmbH | Verfahren zur Erfassung einer Lage eines rotierenden Zentralelements eines Elektromotors |
| FR3083403B1 (fr) * | 2018-06-29 | 2021-01-29 | Valeo Systemes Dessuyage | Moteur electrique a courant continu sans balai et procede de commande associe |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08237986A (ja) * | 1995-02-27 | 1996-09-13 | Hitachi Ltd | 回転位置検出装置及び検出方法 |
| JP2003174792A (ja) * | 2001-12-04 | 2003-06-20 | Toshiba Corp | ブラシレスモータの駆動制御装置 |
| JP3765287B2 (ja) * | 2002-05-09 | 2006-04-12 | トヨタ自動車株式会社 | エネルギー変換機制御装置 |
| JP4395313B2 (ja) * | 2003-04-04 | 2010-01-06 | 日本精工株式会社 | モータ駆動制御装置および電動パワーステアリング装置 |
| JP2005335591A (ja) * | 2004-05-27 | 2005-12-08 | Nissan Motor Co Ltd | 電動式パワーステアリング装置及びブラシレスモータの異常検出装置 |
| JP4589093B2 (ja) * | 2004-12-10 | 2010-12-01 | 日立オートモティブシステムズ株式会社 | 同期モータ駆動装置及び方法 |
| JP4753352B2 (ja) * | 2005-03-18 | 2011-08-24 | 株式会社小松製作所 | 回転センサの補正装置 |
| JP2007307940A (ja) * | 2006-05-16 | 2007-11-29 | Jtekt Corp | 電動パワーステアリング装置 |
-
2008
- 2008-06-24 JP JP2008164561A patent/JP5273451B2/ja not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015027558A1 (zh) * | 2013-08-30 | 2015-03-05 | 中山大洋电机制造有限公司 | 一种应用单个霍尔传感器的三相直流无刷电机的控制方法 |
| CN108900120A (zh) * | 2018-07-09 | 2018-11-27 | 西北工业大学 | 永磁无刷电机霍尔位置传感器容错控制方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010011543A (ja) | 2010-01-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5273451B2 (ja) | モータ制御装置 | |
| JP5435252B2 (ja) | 車両用操舵装置 | |
| JP4716118B2 (ja) | モータ制御装置 | |
| JP4631672B2 (ja) | 磁極位置推定方法、モータ速度推定方法及びモータ制御装置 | |
| JP5267843B2 (ja) | 電動パワーステアリング装置 | |
| JP5267848B2 (ja) | モータ制御装置 | |
| JP4712585B2 (ja) | 電動機の制御装置 | |
| JP5168536B2 (ja) | モータ制御装置 | |
| JP5614598B2 (ja) | モータ制御装置 | |
| JP5273450B2 (ja) | モータ制御装置 | |
| JP2010029028A (ja) | モータ制御装置 | |
| JP5170505B2 (ja) | モータ制御装置 | |
| JP5003929B2 (ja) | 電動パワーステアリング装置 | |
| JP5252190B2 (ja) | モータ制御装置 | |
| JP5392530B2 (ja) | モータ制御装置 | |
| US10505476B2 (en) | Control device and control method of rotary electric machine | |
| JP2008236990A (ja) | モータ制御装置 | |
| CN114208020B (zh) | 交流旋转电机的控制装置及电动助力转向装置 | |
| JPWO2018159101A1 (ja) | モータ制御方法、モータ制御システムおよび電動パワーステアリングシステム | |
| JP2010178609A (ja) | モータ制御装置 | |
| JP2007267547A (ja) | モータ制御装置 | |
| JP2010148324A (ja) | モータ制御装置 | |
| JPWO2018159103A1 (ja) | モータ制御方法、モータ制御システムおよび電動パワーステアリングシステム | |
| JP2009100544A (ja) | モータ制御装置 | |
| JP2018125955A (ja) | モータ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110221 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111025 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111202 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121107 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121108 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121227 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130418 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130501 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5273451 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |