JP2018199433A - 自動操舵制御装置および操舵制御方法 - Google Patents
自動操舵制御装置および操舵制御方法 Download PDFInfo
- Publication number
- JP2018199433A JP2018199433A JP2017105177A JP2017105177A JP2018199433A JP 2018199433 A JP2018199433 A JP 2018199433A JP 2017105177 A JP2017105177 A JP 2017105177A JP 2017105177 A JP2017105177 A JP 2017105177A JP 2018199433 A JP2018199433 A JP 2018199433A
- Authority
- JP
- Japan
- Prior art keywords
- target
- coordinates
- vehicle
- steering control
- coordinate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D1/00—Steering controls, i.e. means for initiating a change of direction of the vehicle
- B62D1/24—Steering controls, i.e. means for initiating a change of direction of the vehicle not vehicle-mounted
- B62D1/28—Steering controls, i.e. means for initiating a change of direction of the vehicle not vehicle-mounted non-mechanical, e.g. following a line or other known markers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/001—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits the torque NOT being among the input parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/002—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits computing target steering angles for front or rear wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/025—Active steering aids, e.g. helping the driver by actively influencing the steering system after environment evaluation
Abstract
【課題】操舵制御を開始するときに目標軌跡を生成することができる自動操舵制御装置を提供する。【解決手段】自動操舵制御装置1において、座標取得部11は、自車の現在位置を示す自車座標および自車の目標位置を示す目標座標を取得する。自車状態量取得部12は、自車の走行状態を示す自車状態量を取得する。目標軌跡設定部13は、自車座標と目標座標との間、あるいは、先に取得された目標座標とその次に取得された目標座標との間を補間する補間座標を算出し、補間座標に基づいて自車の目標軌跡を設定する。操舵制御部14は、自車状態量および目標軌跡に基づいて、自車が目標軌跡に追従して走行するように、自車の操舵制御装置5を制御する。【選択図】図1
Description
本発明は、車両を目標軌跡に追従して走行するように車両の操舵量を制御する自動操舵制御装置に関する。
先行車両の走行軌跡や道路上のセンターライン等を基準にして目標軌跡を設定し、自車両(以下、単に「自車」という)をその目標軌跡に追従するように走行させる自動操舵制御装置が提案されている。例えば下記の特許文献1には、自車の横すべりなどによって自車の車体の前方方向が進行方向に一致しなくなった場合でも、自車の走行を目標軌跡に対してより正確に追従させることができる自動操舵制御装置が開示されている。
上記のような自動操舵制御装置では、自車を追従させる目標軌跡が前もって設定されていることが前提であり、自動操舵制御の開始時など、目標軌跡が存在しない状態では、目標軌跡が設定されるまで操舵制御を行うことが困難である。そのため、制御入力による操舵制御が開始される前に、運転者による操舵などの外乱が加わると、制御入力による操舵制御が開始されたときに自車の位置と目標軌跡との間の偏差が大きくなり、自車の急変動が発生するおそれがある。
本発明は上記のような課題を解決するためになされたものであり、操舵制御を開始するときに目標軌跡を生成することができる自動操舵制御装置を提供することを目的とする。
本発明に係る自動操舵制御装置は、自車の現在位置を示す自車座標および前記自車の目標位置を示す目標座標を取得する座標取得部と、前記自車の走行状態を示す自車状態量を取得する自車状態量取得部と、前記自車座標と前記目標座標との間、あるいは、先に取得された前記目標座標とその次に取得された前記目標座標との間を補間する補間座標を算出し、前記補間座標に基づいて前記自車の目標軌跡を設定する目標軌跡設定部と、前記自車状態量および前記目標軌跡に基づいて、前記自車が前記目標軌跡に追従して走行するように、前記自車の操舵装置を制御する操舵制御部と、を備えるものである。
本発明に係る自動操舵制御装置は、操舵制御を開始するときに目標軌跡を生成できるため、操舵制御を即時に開始することができ、自車の急変動を抑制することができる。
以下、本発明に係る自動操舵制御装置を各実施の形態に従って図面を用いて説明する。なお、各実施の形態において、同一もしくは対応する要素には同一符号を付しており、重複する説明は省略する。
<実施の形態1>
図1は、実施の形態1に係る自動操舵制御装置を含む車両操舵システムの構成を示す図である。この車両操舵システムは、自動操舵制御装置1と、それに接続された自車状態量検出部2、座標検出部3、補間実施信号生成部4および操舵制御装置5を備えている。以下の説明において、「自車」とは、当該車両操舵システムを搭載した車両を指している。
図1は、実施の形態1に係る自動操舵制御装置を含む車両操舵システムの構成を示す図である。この車両操舵システムは、自動操舵制御装置1と、それに接続された自車状態量検出部2、座標検出部3、補間実施信号生成部4および操舵制御装置5を備えている。以下の説明において、「自車」とは、当該車両操舵システムを搭載した車両を指している。
自車状態量検出部2は、自車の走行状態を示す各種の自車状態量を取得し、取得した自車状態量を自動操舵制御装置1に伝達する。本実施の形態では、自車状態量検出部2が、自車速度検出部21、ヨーレート検出部22、横加速度検出部23および操舵角検出部24を備えている。
自車速度検出部21は、自車の走行速度を検出し、検出した走行速度に応じた信号を自動操舵制御装置1へ出力する。ヨーレート検出部22は、自車の旋回方向への回転角の変化速度であるヨーレートを検出し、検出したヨーレートに応じた信号を自動操舵制御装置1へ出力する。横加速度検出部23は、自車の横加速度(いわゆる“横G”)を検出し、検出した横加速度に応じた信号を自動操舵制御装置1へ出力する。操舵角検出部24は、自車の操舵輪の角度(以下「操舵角」)を検出し、検出した操舵角に応じた信号を自動操舵制御装置1へ出力する。自車状態量検出部2は、さらに自車のヨー角や操舵角速度なども検出してもよい。自動操舵制御装置1に入力される自車状態量は、自車の走行速度、ヨー角、ヨーレート、操舵角、操舵角速度、横加速度のうちの少なくとも1つを含んでいればよい。
座標検出部3は、自車の現在位置を示す自車座標を検出する自車座標検出部31と、自車の目標位置を示す目標座標を検出する目標座標検出部32とを含んでいる。本実施の形態では、座標検出部3が検出する自車座標および目標座標は、自車の現在位置を基準とする固定座標系(自車固定座標系)で表されるものとする。ここで、自車の進行方向をX方向(前方を正、後方を負とする)、横方向をY方向(右方を正、左方を負とする)と定義する。また、ヨーレートなど、自車の旋回の向きは、時計回りを正、反時計回りを負と定義する。
自車座標検出部31は、例えばGPS(Global Positioning System)衛星から受信した測位信号から自車の現在位置を検出し、その位置を示す自車座標を算出する。なお、自車固定座標系では、自車座標は常に原点(0,0)となる。
目標座標検出部32は、例えば自車のルームミラーの裏側に設置されたカメラが撮影した自車前方の画像から、自車の目標位置とする地点を検出し、その位置を示す自車座標を算出する。目標位置の検出に用いる情報としては、自車前方の画像の他、自車のレーダが検出した自車前方に存在する物体の情報、車車間通信または路車間通信から得た自車周辺の情報、自車座標検出部31が検出した自車の現在位置に対応する地図情報などを用いることもできる。
操舵制御装置5は、自車の操舵角を制御する装置であり、例えば、電動式パワーステアリングの電動モータ(特に種類の制限はなく、直流モータでも交流モータでもよい)、あるいは、油圧式パワーステアリングの油圧ポンプなどから構成される。また、操舵制御装置5は、自車の操舵制御が可能なものであれば任意の装置でよく、例えば、ハンドルと転舵輪との間の機械的リンクを廃したステアリングバイワイヤと称されるものでもよい。
自動操舵制御装置1は、座標検出部3が検出した自車座標および目標座標に基づいて、自車の目標軌跡を設定し、設定した目標軌跡と自車状態量検出部2が検出した自車状態量とに基づいて、自車が目標軌跡に追従して走行するように操舵制御装置5を制御する。
自動操舵制御装置1は、座標取得部11、自車状態量取得部12、目標軌跡設定部13および操舵制御部14を備えている。
座標取得部11は、座標検出部3から出力される自車座標および目標座標を取得する。自車座標および目標座標が自車固定座標系で表される場合、自車座標は常に(0,0)であることが分かっているため、座標取得部11は自車座標の取得を省略してもよい。自車状態量取得部12は、自車状態量検出部2から出力される自車状態量(自車の走行速度、ヨーレート、操舵角、横加速度)を取得する。目標軌跡設定部13は、座標取得部11が検出した自車座標および目標座標に基づいて、自車の目標軌跡を設定する。
操舵制御部14は、目標軌跡設定部13が設定した目標軌跡と、自車状態量検出部2が検出した自車状態量とに基づいて、自車が目標軌跡に追従して走行するように操舵制御装置5を制御する。すなわち、操舵制御部14は、自車を目標軌跡に追従させるための操舵量の目標値(目標操舵量)を算出し、操舵制御装置5に目標操舵量を実現する動力を発生させるための操舵制御信号(例えば、電動パワーステアリング装置に入力する電流)を出力することで、自車を目標軌跡に追従させる。
図1に示すように、目標軌跡設定部13は、座標補間部131、座標記憶部132、目標軌跡演算部133および座標変換部134から構成されている。
座標補間部131は、座標取得部11により取得された自車座標と目標座標との間を補間する補間座標を算出する。また、座標補間部131は、先に取得された目標座標に自車が到達する前にその次の目標座標が取得されたときは、その2つの目標座標の間を補間する補間座標を算出する。以下、それらの補間座標の算出処理を、「座標補間処理」という。座標補間部131が算出する補間座標も自車固定座標系で表されるものとする。
なお、自車座標と目標座標との間の座標補間処理を行う場合、目標座標が複数検出されていれば、座標補間部131は、必ずしも自車座標とそれに最も近い目標座標との間を補間しなくてもよい。例えば、座標補間部131が、自車のヨー角およびヨーレートの少なくとも片方に基づいて、運転者に不快感を与えないような操舵角となる目標軌跡(例えば、自車を追従させるために必要となる操舵角が一定値以下に収まるような目標軌跡)が得られる目標座標を選択し、自車座標と選択された目標座標との間を補間するようにしてもよい。
座標記憶部132は、座標取得部11により取得された自車座標および目標座標、ならびに、座標補間部131が算出した補間座標を記憶する。
目標軌跡演算部133は、座標記憶部132に記憶された自車座標、目標座標および補間座標に基づいて、自車の目標軌跡を演算する。つまり、目標軌跡演算部133は、自車座標から補間座標を辿って目標座標へ到達する軌跡、あるいは、先に取得された目標座標から補間座標を辿って次の目標座標へ到達する軌跡を算出し、得られた軌跡を目標軌跡として設定する。
本実施の形態では、自車座標、目標座標および補間座標が自車固定座標系で表されるため、自車の位置および向きの変化に応じて、それらの座標の値を変換する必要がある。座標変換部134は、その座標変換処理を行う。具体的には、座標変換部134は、予め定められた演算周期(例えば0.01秒周期)で、自車の走行速度から算出される自車の移動量と、自車のヨーレートから算出される自車のヨー角の変動量とに基づいて、次の式(1)による座標変換を行う。

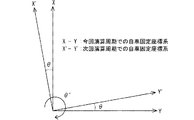
式(1)において、sxは演算周期ごとの自車位置の前後方向(X方向)への移動量、syは自車位置の横方向(Y方向)への移動量である。また、[X Y]Tは、現在の演算周期(以下「今回演算周期」という)における座標、[X’ Y’]Tは、今回演算周期の次の演算周期(以下「次回演算周期」という)における座標である。θは、今回演算周期における自車のヨーレートの積分値であり、自車のヨー角を表している。演算周期ごとに、目標軌跡演算部133が座標変換処理を行うことで、自車座標を常に原点(0,0)とした座標表現が可能となる。
図2に、今回演算周期の座標系と次回演算周期の座標系との関係を示す。θ’は今回演算周期における自車のヨーレート、θはθ’を積分して得られた自車のヨー角を示している)。なお、図2では自車位置の変動量(sxおよびsy)は無視している。自車が移動していない場合、あるいは、自車の移動量が自車状態量検出部2で検知できないほど小さい場合には、sxおよびsyはともに0になる。
補間実施信号生成部4は、目標軌跡設定部13の座標補間部131に、座標補間処理を行わせるための補間実施信号を出力する。補間実施信号生成部4が補間実施信号をオン状態にすると、座標補間部131が座標補間処理を実施する。補間実施信号生成部4は、特定の条件が満たされると補間実施信号をオン状態にする。補間実施信号の出力形式としては、例えば、ソフトウェア内の特定のフラグをオン状態にすることや、物理的な押し釦、スイッチまたは継電器接点などをオン状態にすることなど、その形式は問わない。また、補間実施信号は、1組の自車座標および目標座標に対して1度だけオン状態にされるとは限らず、例えば目標座標がリセットされたときなど、座標補間処理が必要になれば適宜オン状態にされる。
本実施の形態では、補間実施信号生成部4は、新たな目標座標が取得されたときに、補間実施信号をオン状態にするものとする。ただし、補間実施信号生成部4は、新たな目標座標が取得されても、必要でなければ即座に補間実施信号をオン状態にしなくてもよく、自車状態量が特定の条件(例えば、運転者に不快感を与えない条件として予め定められた条件)を満足したときに、補間実施信号をオン状態にするようにしてもよい。
図3は、自動操舵制御装置1の動作を示すフローチャートである。自動操舵制御装置1は、予め定められた演算周期ごとに図3の処理を実行する。以下、図3を参照しつつ、各演算周期における自動操舵制御装置1の動作を説明する。
各演算周期に入ると、座標取得部11は、座標検出部3から出力される自車座標および目標座標を取得する(ステップS1)。また、自車状態量取得部12は、自車状態量検出部2から出力される自車状態量(自車の走行速度、ヨーレート、横加速度、操舵角)のデータを取得する(ステップS2)。座標取得部11が取得した自車座標および目標座標のデータは、座標記憶部132に記憶される。本実施の形態のように自車固定座標系を用いる場合には、自車座標は常に原点(0,0)であることが分かっているため、ステップS1では、自車座標のデータを必ずしも座標検出部3から取得しなくてもよい。
その後、目標軌跡設定部13の座標補間部131は、補間実施信号生成部4が出力する補間実施信号がオン状態か否かを確認することで、座標補間処理を行うかどうかを判定する(ステップS3)。
補間実施信号がオン状態であれば(ステップS3でYES)、座標補間部131は、ステップS1で取得した自車座標および目標座標を用いて、自車座標と目標座標との間、あるいは、先に取得された目標座標と次に取得された目標座標との間の座標補間処理を行う(ステップS4)。座標補間部131が算出した補間座標のデータも、座標記憶部132に記憶される。
自車座標と目標座標との間の座標補間処理は、例えば式(2)に示す補間関数を用いて行うことができる。
式(2)において、XaおよびYbはそれぞれ目標座標のX座標およびY座標である。また、nは自車位置から目標座標との間に設ける補間座標の数に相当する。
例えば、Xa=4,Ya=3,n=10とし、式(2)を用いた座標補間処理を行った結果を図4に示す。図4の右側に示す座標データは、座標補間処理前の各補間座標の座標データであり(全て自車位置(0,0)に初期化されている)、図4の左側に示す座標データは、座標補間処理後の各補間座標の座標データである。ここでは、補間座標の数nを10としたが、座標記憶部132の記憶容量や自動操舵制御装置1を処理負荷の制限の範囲内であれば任意の数でよい。
上に示した式(2)は、自車座標と目標座標との間を1次式で直線的に補間するための補間関数であるが、2次以上の高次式で曲線的に補完する補間関数が用いられてもよい。また、先に取得された目標座標と次に取得された目標座標との間の座標補間処理も、式(2)と同様の1次式の補間関数、あるいは、高次の補間関数によって行うことができる。また、自車座標と目標座標との間、あるいは、先に取得された目標座標と次に取得された目標座標との間を、複数の区間に分け、各区間で異なる補間式を用いて座標補間処理を行ってもよい。
座標補間処理が完了すると、目標軌跡演算部133が、座標記憶部132に記憶されている自車座標、目標座標および補間座標に基づいて、自車の目標軌跡を設定する(ステップS5)。
なお、補間実施信号がオフ状態であるときは(ステップS3でNO)、上記のステップS4は行われないが、ステップS5は目標操舵量の算出に用いる座標情報を更新するために実施される。
次に、操舵制御部14が、目標軌跡演算部133により設定された目標軌跡に基づいて目標操舵量を算出する(ステップS6)。そして、操舵制御部14は、算出した目標操舵量を実現するための操舵制御信号を操舵制御装置5へ出力する(ステップS7)。
続いて、座標変換部134が、式(1)を用いて、座標記憶部132に記憶されている自車座標、目標座標および補間座標に対し、次回演算周期のための座標系への座標変換処理を行う(ステップS8)。この処理により、ステップS5で設定された目標軌跡も、次回演算周期のための座標系へ変換されることになる。座標変換処理後の各座標のデータは、座標記憶部132に記憶される(ステップS9)。目標座標のリセットや新たな目標座標の取得などがなければ、次回演算周期における目標操舵角の演算(ステップS6)は、今回演算周期のステップS9で座標記憶部132に記憶されたデータから得られる目標軌跡に基づいて行われる。以上により、1回の演算周期の処理が完了する。
本実施の形態に係る自動操舵制御装置1によれば、操舵制御を開始するときに、自車座標と目標座標との間を補間して目標軌跡を生成することができるため、前もって目標軌跡が設定されていない状態からでも、操舵制御を即時に開始することができる。それにより、自車の急変動を抑制することができ、運転者に不快感を与えないような操舵制御を行うことができる。
図5および図6は、それぞれ自動操舵制御装置1のハードウェア構成の一例を示す図である。図1に示した自動操舵制御装置1の各要素(座標取得部11、自車状態量取得部12、目標軌跡設定部13および操舵制御部14)は、例えば図5に示す処理回路50により実現される。すなわち、処理回路50は、自車座標および目標座標を取得する座標取得部11と、自車状態量を取得する自車状態量取得部12と、自車座標と目標座標との間、あるいは、先に取得された目標座標とその次に取得された目標座標との間を補間する補間座標を算出し、補間座標に基づいて自車の目標軌跡を設定する目標軌跡設定部13と、自車状態量および目標軌跡に基づいて、自車が目標軌跡に追従して走行するように、自車の操舵装置を制御する操舵制御部14と、を備える。処理回路50には、専用のハードウェアが適用されてもよいし、メモリに格納されるプログラムを実行するプロセッサ(中央処理装置(CPU:Central Processing Unit)、処理装置、演算装置、マイクロプロセッサ、マイクロコンピュータ、DSP(Digital Signal Processor)ともいう)が適用されてもよい。
処理回路50が専用のハードウェアである場合、処理回路50は、例えば、単一回路、複合回路、プログラム化したプロセッサ、並列プログラム化したプロセッサ、ASIC(Application Specific Integrated Circuit)、FPGA(Field-Programmable Gate Array)、またはこれらを組み合わせたものなどが該当する。自動操舵制御装置1の各要素の機能のそれぞれは、複数の処理回路で実現されてもよいし、それらの機能がまとめて一つの処理回路で実現されてもよい。
図6は、処理回路50がプロセッサを用いて構成されている場合における自動操舵制御装置1のハードウェア構成を示している。この場合、自動操舵制御装置1の各要素の機能は、ソフトウェア等(ソフトウェア、ファームウェア、またはソフトウェアとファームウェア)との組み合わせにより実現される。ソフトウェア等はプログラムとして記述され、メモリ52に格納される。処理回路50としてのプロセッサ51は、メモリ52に記憶されたプログラムを読み出して実行することにより、各部の機能を実現する。すなわち、自動操舵制御装置1は、処理回路50により実行されるときに、自車座標および目標座標を取得する処理と、自車状態量を取得する処理と、自車座標と目標座標との間、あるいは、先に取得された目標座標とその次に取得された目標座標との間を補間する補間座標を算出する処理と、補間座標に基づいて自車の目標軌跡を設定する処理と、自車状態量および目標軌跡に基づいて、自車が目標軌跡に追従して走行するように、自車の操舵装置を制御する処理と、が結果的に実行されることになるプログラムを格納するためのメモリ52を備える。換言すれば、このプログラムは、自動操舵制御装置1の各要素の動作の手順や方法をコンピュータに実行させるものであるともいえる。
ここで、メモリ52は、例えば、RAM(Random Access Memory)、ROM(Read Only Memory)、フラッシュメモリー、EPROM(Erasable Programmable Read Only Memory)、EEPROM(Electrically Erasable Programmable Read Only Memory)などの、不揮発性または揮発性の半導体メモリ、HDD(Hard Disk Drive)、磁気ディスク、フレキシブルディスク、光ディスク、コンパクトディスク、ミニディスク、DVD(Digital Versatile Disc)およびそのドライブ装置等、または、今後使用されるあらゆる記憶媒体であってもよい。
以上、自動操舵制御装置1の各要素の機能が、ハードウェアおよびソフトウェア等のいずれか一方で実現される構成について説明した。しかしこれに限ったものではなく、自動操舵制御装置1の一部の要素を専用のハードウェアで実現し、別の一部の要素をソフトウェア等で実現する構成であってもよい。例えば、一部の要素については専用のハードウェアとしての処理回路50でその機能を実現し、他の一部の要素についてはプロセッサ51としての処理回路50がメモリ52に格納されたプログラムを読み出して実行することによってその機能を実現することが可能である。
以上のように、自動操舵制御装置1は、ハードウェア、ソフトウェア等、またはこれらの組み合わせによって、上述の各機能を実現することができる。
<実施の形態2>
実施の形態1に示したように、自動操舵制御装置1の座標補間部131は、基本的に、自車座標と目標座標との間、あるいは、目標座標同士の間(先に取得された目標座標と次に取得された目標座標との間)の座標補間処理を行うが、例えば、座標記憶部132に記憶されている補間座標のデータの一部に欠落があった場合や、高次式による曲線的な座標補間処理を行った結果、補間座標のデータの変動が非常に大きくなった場合など、補間座標のデータの一部に不具合が生じた場合には、部分的な座標補間処理を行ってもよい。
実施の形態1に示したように、自動操舵制御装置1の座標補間部131は、基本的に、自車座標と目標座標との間、あるいは、目標座標同士の間(先に取得された目標座標と次に取得された目標座標との間)の座標補間処理を行うが、例えば、座標記憶部132に記憶されている補間座標のデータの一部に欠落があった場合や、高次式による曲線的な座標補間処理を行った結果、補間座標のデータの変動が非常に大きくなった場合など、補間座標のデータの一部に不具合が生じた場合には、部分的な座標補間処理を行ってもよい。
自車座標と目標座標との間または目標座標同士の間の一部分の区間に対して、一次式による座標補間処理を行う場合、式(3)に示す補間関数を用いることができる。
例えば、図7の左側に示すように自車座標と目標座標との間を補間する補間座標の一部である座標4〜7に欠落が生じた場合、式(3)において、Xb=2.8,Xc=0.8,Yb=2.1,Yc=0.6,n=5と設定して座標補間処理を行うことで、図7の右側に示すように補間座標4〜7の座標データを修正することができる。このように、座標補間部131が部分的な座標補間処理をできるようにすると、補間座標のデータに部分的な不具合が生じた場合でも、その部分の補間座標のデータを修正でき、操舵制御を継続することができる。
なお、本発明は、その発明の範囲内において、各実施の形態を自由に組み合わせたり、各実施の形態を適宜、変形、省略することが可能である。
1 自動操舵制御装置、2 自車状態量検出部、3 座標検出部、4 補間実施信号生成部、5 操舵制御装置、11 座標取得部、12 自車状態量取得部、13 目標軌跡設定部、14 操舵制御部、21 自車速度検出部、22 ヨーレート検出部、23 横加速度検出部、24 操舵角検出部、31 自車座標検出部、32 目標座標検出部、131 座標補間部、132 座標記憶部、133 目標軌跡演算部、134 座標変換部。
本発明に係る自動操舵制御装置は、自車の現在位置を示す自車座標および前記自車の目標位置を示す目標座標を取得する座標取得部と、前記自車の走行状態を示す自車状態量を取得する自車状態量取得部と、前記自車座標と前記目標座標との間、あるいは、先に取得された前記目標座標とその次に取得された前記目標座標との間を補間する補間座標を算出し、前記補間座標に基づいて前記自車の目標軌跡を設定する目標軌跡設定部と、前記自車状態量および前記目標軌跡に基づいて、前記自車が前記目標軌跡に追従して走行するように、前記自車の操舵装置を制御する操舵制御部と、を備え、前記目標軌跡設定部は、前記目標座標が複数検出されている場合、前記自車のヨー角およびヨーレートのうちの少なくとも片方に基づいて、前記自車を追従させるために必要となる操舵角が予め定められた値以下に収まる前記目標軌跡が得られる目標座標を、前記自車座標との間で補間を行う目標座標として選択するものである。
Claims (8)
- 自車の現在位置を示す自車座標および前記自車の目標位置を示す目標座標を取得する座標取得部と、
前記自車の走行状態を示す自車状態量を取得する自車状態量取得部と、
前記自車座標と前記目標座標との間、あるいは、先に取得された前記目標座標とその次に取得された前記目標座標との間を補間する補間座標を算出し、前記補間座標に基づいて前記自車の目標軌跡を設定する目標軌跡設定部と、
前記自車状態量および前記目標軌跡に基づいて、前記自車が前記目標軌跡に追従して走行するように、前記自車の操舵装置を制御する操舵制御部と、
を備える
自動操舵制御装置。 - 前記目標軌跡設定部は、前記目標座標が複数検出されている場合、前記自車のヨー角およびヨーレートのうちの少なくとも片方に基づいて、前記自車座標との間で補間を行う目標座標を選択する、
請求項1に記載の自動操舵制御装置。 - 前記目標軌跡設定部は、前記自車状態量が予め定められた条件を満たしたときに、前記補間座標の算出を実施する、
請求項1または請求項2に記載の自動操舵制御装置。 - 前記自車状態量は、前記自車の走行速度、ヨー角、ヨーレート、操舵角、操舵角速度、横加速度のうちの少なくとも1つを含む
請求項1から請求項3のいずれか一項に記載の自動操舵制御装置。 - 前記目標軌跡設定部は、前記自車座標と前記目標座標との間、あるいは、先に取得された前記目標座標とその次に取得された前記目標座標との間を、直線的または曲線的に補間するように前記補間座標を算出する、
請求項1から請求項4のいずれか一項に記載の自動操舵制御装置。 - 前記目標軌跡設定部は、1次式を用いて、前記自車座標と前記目標座標との間、あるいは、先に取得された前記目標座標とその次に取得された前記目標座標との間を、直線的に補間する
請求項5に記載の自動操舵制御装置。 - 前記目標軌跡設定部は、2次以上の高次式を用いて、前記自車座標と前記目標座標との間、あるいは、先に取得された前記目標座標とその次に取得された前記目標座標との間を、曲線的に補間する
請求項5に記載の自動操舵制御装置。 - 自動操舵制御装置における車両の操舵制御方法であって、
前記自動操舵制御装置の座標取得部が、自車の現在位置を示す自車座標および前記自車の目標位置を示す目標座標を取得し、
前記自動操舵制御装置の自車状態量取得部が、前記自車の走行状態を示す自車状態量を取得し、
前記自動操舵制御装置の目標軌跡設定部が、前記自車座標と前記目標座標との間、あるいは、先に取得された前記目標座標とその次に取得された前記目標座標との間を補間する補間座標を算出し、前記補間座標に基づいて前記自車の目標軌跡を設定し、
前記自動操舵制御装置の操舵制御部が、前記自車状態量および前記目標軌跡に基づいて、前記自車が前記目標軌跡に追従して走行するように、前記自車の操舵装置を制御する、
操舵制御方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017105177A JP2018199433A (ja) | 2017-05-29 | 2017-05-29 | 自動操舵制御装置および操舵制御方法 |
| US15/867,872 US10549776B2 (en) | 2017-05-29 | 2018-01-11 | Automatic steering control apparatus and steering control method |
| DE102018202256.9A DE102018202256A1 (de) | 2017-05-29 | 2018-02-14 | Automatische Lenksteuereinrichtung und Lenksteuerverfahren |
| CN201810493438.6A CN108928390B (zh) | 2017-05-29 | 2018-05-22 | 自动转向控制装置以及转向控制方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017105177A JP2018199433A (ja) | 2017-05-29 | 2017-05-29 | 自動操舵制御装置および操舵制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2018199433A true JP2018199433A (ja) | 2018-12-20 |
Family
ID=64109636
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017105177A Pending JP2018199433A (ja) | 2017-05-29 | 2017-05-29 | 自動操舵制御装置および操舵制御方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10549776B2 (ja) |
| JP (1) | JP2018199433A (ja) |
| CN (1) | CN108928390B (ja) |
| DE (1) | DE102018202256A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6910973B2 (ja) * | 2018-02-02 | 2021-07-28 | 日立Astemo株式会社 | 車両制御装置及びその制御方法並びに車両制御システム |
| JP6661695B2 (ja) * | 2018-05-09 | 2020-03-11 | 三菱電機株式会社 | 移動体検出装置、車両制御システム、移動体検出方法および車両制御方法 |
| CN109583776A (zh) * | 2018-12-05 | 2019-04-05 | 百度在线网络技术(北京)有限公司 | 一种车辆体感评测方法、装置、电子设备、介质和车辆 |
| CN110703749B (zh) * | 2019-10-11 | 2022-11-18 | 浙江华睿科技股份有限公司 | 一种控制车辆运动的方法及装置 |
| CN111634331B (zh) * | 2020-06-10 | 2021-04-09 | 上海联适导航技术股份有限公司 | 一种自动驾驶车辆的转向控制方法、装置及系统 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000322697A (ja) * | 1999-05-10 | 2000-11-24 | Honda Motor Co Ltd | 自動追従走行車における操舵制御装置 |
| JP2017065473A (ja) * | 2015-09-30 | 2017-04-06 | 富士重工業株式会社 | 操舵支援制御装置 |
| JP2017076234A (ja) * | 2015-10-14 | 2017-04-20 | 株式会社デンソー | 運転支援装置、及び運転支援方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8260539B2 (en) * | 2010-05-12 | 2012-09-04 | GM Global Technology Operations LLC | Object and vehicle detection and tracking using 3-D laser rangefinder |
| KR101358329B1 (ko) * | 2012-09-03 | 2014-02-04 | 현대모비스 주식회사 | 차선 추종 제어 시스템 및 그 제어 방법 |
| CN103226354A (zh) * | 2013-02-27 | 2013-07-31 | 广东工业大学 | 基于光电导航的无人驾驶道路识别系统 |
| JP2015077908A (ja) | 2013-10-17 | 2015-04-23 | トヨタ自動車株式会社 | 自動操舵制御装置 |
| US10439535B2 (en) * | 2015-04-27 | 2019-10-08 | Mitsubishi Electric Corporation | Control device of AC rotating machine and electric power steering device |
| CN107851392B (zh) * | 2015-07-22 | 2021-04-09 | 本田技研工业株式会社 | 路径生成装置、路径生成方法及存储路径生成程序的介质 |
| US10579062B2 (en) * | 2017-05-31 | 2020-03-03 | Baidu Usa Llc | Scalable smooth reference path generator for autonomous driving vehicles |
-
2017
- 2017-05-29 JP JP2017105177A patent/JP2018199433A/ja active Pending
-
2018
- 2018-01-11 US US15/867,872 patent/US10549776B2/en active Active
- 2018-02-14 DE DE102018202256.9A patent/DE102018202256A1/de active Pending
- 2018-05-22 CN CN201810493438.6A patent/CN108928390B/zh active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000322697A (ja) * | 1999-05-10 | 2000-11-24 | Honda Motor Co Ltd | 自動追従走行車における操舵制御装置 |
| JP2017065473A (ja) * | 2015-09-30 | 2017-04-06 | 富士重工業株式会社 | 操舵支援制御装置 |
| JP2017076234A (ja) * | 2015-10-14 | 2017-04-20 | 株式会社デンソー | 運転支援装置、及び運転支援方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN108928390B (zh) | 2021-06-08 |
| DE102018202256A1 (de) | 2018-11-29 |
| CN108928390A (zh) | 2018-12-04 |
| US10549776B2 (en) | 2020-02-04 |
| US20180339728A1 (en) | 2018-11-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2018199433A (ja) | 自動操舵制御装置および操舵制御方法 | |
| CN111066071B (zh) | 驾驶辅助车辆的位置误差校正方法及位置误差校正装置 | |
| JP2018177121A (ja) | 自動運転システム | |
| JP6723301B2 (ja) | 車両用操舵装置 | |
| KR20190021930A (ko) | 주행 차로 변경 시 경로를 생성하는 시스템 및 방법 | |
| JP6261832B1 (ja) | 走行路認識装置及び走行路認識方法 | |
| JP6419671B2 (ja) | 車両用操舵装置および車両用操舵方法 | |
| JP2016193678A (ja) | 車両用操舵装置および車両操舵制御方法 | |
| JP6917330B2 (ja) | 駐車支援装置 | |
| JP2019073229A (ja) | 目標軌道生成装置および目標軌道生成方法 | |
| EP4001844A1 (en) | Method and apparatus with localization | |
| US20210197811A1 (en) | Course prediction device, computer readable medium, and course prediction method | |
| JP2019199160A (ja) | 走行軌跡認識装置、走行軌跡認識方法、車両制御装置、および車両制御方法 | |
| JP6675354B2 (ja) | 車両用操舵制御装置 | |
| CN113710556A (zh) | 停车辅助装置及停车辅助方法 | |
| JP7113938B1 (ja) | 目標制御情報生成装置 | |
| JP6440795B1 (ja) | 車両用操舵装置および操舵制御方法 | |
| JP2019202642A (ja) | 車両用走行制御装置 | |
| JP5865325B2 (ja) | 移動体位置算出装置及び方法 | |
| JP2020168903A (ja) | 座標データ補正装置およびこれを用いた移動体追従装置並びに移動体追従方法 | |
| JP6233127B2 (ja) | ジャイロセンサのオフセット補正装置、車両用ナビゲーション装置及びジャイロセンサのオフセット補正方法 | |
| JP2019196067A (ja) | 移動体検出装置、車両制御システム、移動体検出方法および車両制御方法 | |
| JP6717132B2 (ja) | 車両走行制御方法及び車両走行制御装置 | |
| JP5293164B2 (ja) | ナビゲーション装置およびナビゲーション方法 | |
| JP2018203156A (ja) | 車両用操舵装置および車両操舵制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180925 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190326 |