JP6074967B2 - 振動片、振動子、電子デバイス、電子機器、および移動体 - Google Patents
振動片、振動子、電子デバイス、電子機器、および移動体 Download PDFInfo
- Publication number
- JP6074967B2 JP6074967B2 JP2012206659A JP2012206659A JP6074967B2 JP 6074967 B2 JP6074967 B2 JP 6074967B2 JP 2012206659 A JP2012206659 A JP 2012206659A JP 2012206659 A JP2012206659 A JP 2012206659A JP 6074967 B2 JP6074967 B2 JP 6074967B2
- Authority
- JP
- Japan
- Prior art keywords
- vibrating
- arm
- base
- vibration
- vibrating arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Classifications
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5705—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using masses driven in reciprocating rotary motion about an axis
- G01C19/5712—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using masses driven in reciprocating rotary motion about an axis the devices involving a micromechanical structure
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5719—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using planar vibrating masses driven in a translation vibration along an axis
- G01C19/5733—Structural details or topology
Description
先ず、本発明にかかる振動片の実施形態、およびその振動片を適用した振動子の実施形態について説明する。
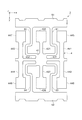
図2は、上側(リッド92側)から見た振動片としてのジャイロ素子の第1実施形態を示す平面図である。なお、ジャイロ素子には、検出信号電極、検出信号配線、検出信号端子、検出接地電極、検出接地配線、検出接地端子、駆動信号電極、駆動信号配線、駆動信号端子、駆動接地電極、駆動接地配線および駆動接地端子などが設けられているが、同図においては省略している。
ジャイロ素子2は、水晶、タンタル酸リチウム、ニオブ酸リチウムなどの圧電材料で構成することができるが、これらの中でも、水晶で構成するのが好ましい。これにより、優れた振動特性(周波数特性)を発揮することのできるジャイロ素子2が得られる。
このようなジャイロ素子2は、いわゆるダブルT型をなす振動体4と、振動体4を支持する支持部としての第1固定部51および第2固定部52と、振動体4と第1固定部51とを連結する第1梁としての第1連結梁61および第2連結梁62と、振動体4と第2固定部52とを連結する第2梁としての第3連結梁63および第4連結梁64とを有している。
また、本例では、基部41から延出している第1連結腕431、第2連結腕432から第1駆動振動腕441、第3駆動振動腕442、第2駆動振動腕443、および第4駆動振動腕444が延出している構成で説明したが、基部41と第1連結腕431と第2連結腕432とを含めて基部とすることも可能である。即ち、基部から第1駆動振動腕、第2駆動振動腕、第3駆動振動腕、および第4駆動振動腕が延出している構成も可能である。
また、第1、第2固定部51、52は、それぞれ、x軸方向に沿って延在しており、これら第1、第2固定部51、52の間に振動体4が位置している。言い換えれば、第1、第2固定部51、52は、振動体4を介してy軸方向に沿って対向するように配置されている。第1固定部51は、第1連結梁61、および第2連結梁62を介して基部41と連結されており、第2固定部52は、第3連結梁63、および第4連結梁64を介して基部41と連結されている。
ここで、ジャイロ素子2における不要振動について説明する。ジャイロ素子2においては、ジャイロ素子2が駆動している(動作している)際に、僅かではあるが励起される不要振動が発生する。この不要振動には種々の振動モードが存在するが、発明者らは、次に示す2つの振動モード(y1モードの振動、およびy2モードの振動)がジャイロ素子2の特性における温度ドリフトに大きな影響を持つことに着目した。
パッケージ9は、ジャイロ素子2を収納するものである。なお、パッケージ9には、後述する電子デバイスのように、ジャイロ素子2の他に、ジャイロ素子2の駆動等を行うICチップ等が収納されていてもよい。このようなパッケージ9は、その平面視(xy平面視)にて、略矩形状をなしている。
また、第1連結梁61、第2連結梁62、第3連結梁63、第4連結梁64のそれぞれの梁によって、基部41が対向配置された第1固定部51および第2固定部52のそれぞれに連結されている。これにより、基部41から第1連結梁61、第2連結梁62、第3連結梁63、第4連結梁64にかけて生じる応力を緩和することが可能となり、これらの梁に伝播している振動モレ現象による振動の第1固定部51および第2固定部52への伝播を低減することが可能となる。したがって、振動モレ現象による温度ドリフトを低減させることが可能となり、前述の不要振動による温度ドリフトの低減と合わせて、温度ドリフトを低減させた角速度の検出が可能となる。
ジャイロ素子の第2実施形態について図7を用いて説明する。図7は、第2実施形態のジャイロ素子を示し、(a)は平面図、(b)は(a)のQ−Q断面図である。なお、本第2実施形態の説明では、上述の第1実施形態と同じ構成については同符号を付けてその説明を省略することもある。
ジャイロ素子の第3実施形態について図8を用いて説明する。図8は、第3実施形態のジャイロ素子を示す平面図である。なお、本第3実施形態の説明では、上述の第1実施形態と同じ構成については同符号を付けてその説明を省略することもある。
次に、上述のジャイロ素子2、2a、2bを用いた電子デバイスの一例としてのジャイロセンサーについて、図9を用いて説明する。図9はジャイロセンサーの概略を示す正断面図である。なお、ここでの説明では、上述の実施形態の内、第1実施形態のジャイロ素子2を用いた例で説明する。
ジャイロ素子2は、収容器81に形成された支持台82に、ジャイロ素子2の固定部51、52が導電性接着剤などの固定部材83を介して接着支持されている。また、支持台82表面には配線(図示せず)が形成され、ジャイロ素子2の電極と配線間の導通が固定部材83を介してなされている。この固定部材83は、弾性のある材料であることが望ましい。弾性を有する固定部材83としてはシリコーンを基材とする導電性接着剤などが知られている。そして、収容器81内を真空雰囲気に保持し、収容器81の上部の開口が蓋体86にて封止されている。
次いで、本発明の一実施形態に係る振動片としてのジャイロ素子2、2a、2b、振動片としてのジャイロ素子2、2a、2bを用いた振動子1、あるいは電子デバイスとしてのジャイロセンサー80を適用した電子機器について、図10〜図12に基づき、詳細に説明する。なお、説明では、振動片としてのジャイロ素子2を用いた振動子1を適用した例を示している。
デジタルスチールカメラ1300におけるケース(ボディー)1302の背面には、表示部100が設けられ、CCDによる撮像信号に基づいて表示を行う構成になっており、表示部100は、被写体を電子画像として表示するファインダーとして機能する。また、ケース1302の正面側(図中裏面側)には、光学レンズ(撮像光学系)やCCD等を含む受光ユニット1304が設けられている。
撮影者が表示部100に表示された被写体像を確認し、シャッターボタン1306を押下すると、その時点におけるCCDの撮像信号が、メモリー1308に転送・格納される。また、このデジタルスチールカメラ1300においては、ケース1302の側面に、ビデオ信号出力端子1312と、データ通信用の入出力端子1314とが設けられている。そして、図示されるように、ビデオ信号出力端子1312にはテレビモニター1430が、データ通信用の入出力端子1314にはパーソナルコンピューター1440が、それぞれ必要に応じて接続される。さらに、所定の操作により、メモリー1308に格納された撮像信号が、テレビモニター1430や、パーソナルコンピューター1440に出力される構成になっている。このようなデジタルスチールカメラ1300には、角速度センサー等として機能するジャイロ素子2を用いた振動子1が内蔵されている。
図13は移動体の一例としての自動車を概略的に示す斜視図である。自動車106には本発明に係るジャイロ素子2を用いた振動子1が搭載されている。例えば、同図に示すように、移動体としての自動車106には、ジャイロ素子2を用いた振動子1を内蔵してタイヤ109などを制御する電子制御ユニット108が車体107に搭載されている。また、振動子1は、他にもキーレスエントリー、イモビライザー、カーナビゲーションシステム、カーエアコン、アンチロックブレーキシステム(ABS)、エアバック、タイヤ・プレッシャー・モニタリング・システム(TPMS:Tire Pressure Monitoring System)、エンジンコントロール、ハイブリッド自動車や電気自動車の電池モニター、車体姿勢制御システム、等の電子制御ユニット(ECU:electronic control unit)に広く適用できる。
Claims (10)
- 基部と、
前記基部の一端から延出されている第1振動腕と、
前記一端と反対側の前記基部の他端から延出されている第2振動腕と、を備え、
前記第1振動腕および前記第2振動腕が、前記第1振動腕または前記第2振動腕が延出している第1方向と直交する第2方向に沿って振動する駆動振動周波数fdと、
前記基部の重心と前記第1振動腕および前記第2振動腕とが、前記第1方向に沿って互いに同じ方向に振動するy1モード振動周波数fy1と、
前記基部の重心と前記第1振動腕および前記第2振動腕とが、前記第1方向に沿って互いに逆方向に振動するy2モード振動周波数fy2と、の関係が、
|fd−fy1|>|fd−fy2|
であることを特徴とするジャイロ振動片。 - 前記基部から延出され、平面視で互いに反対方向に延伸されている第1梁および第2梁と、
前記第1梁と連結されている第1固定部と、
前記第1梁と平面視で前記基部を挟んで反対側に設けられ、前記第2梁と連結されている第2固定部と、を備えていることを特徴とする請求項1に記載のジャイロ振動片。 - 前記第1梁および前記第2梁の厚さは、前記基部の厚さよりも薄いことを特徴とする請求項2に記載のジャイロ振動片。
- 前記第1梁および前記第2梁は、前記第1方向に沿って延伸されており、
前記第1梁の前記第1振動腕側、および前記第2梁の前記第2振動腕側には、突起部が設けられていることを特徴とする請求項2または請求項3に記載のジャイロ振動片。 - 前記基部から両側へ前記第1方向に沿って延出されている第1および第2検出振動腕を備えていることを特徴とする請求項2ないし請求項4のいずれか一項に記載のジャイロ振動片。
- 前記第1振動腕は、第1および第2駆動振動腕を備え、
前記第2振動腕は、第3および第4駆動振動腕を備え、
前記第1梁は、前記基部から延出され、前記第1検出振動腕と前記第1駆動振動腕との間を通る第1連結梁と、前記基部から延出され、前記第1検出振動腕と前記第2駆動振動腕との間を通る第2連結梁と、を備え、
前記第2梁は、前記基部から延出され、前記第2検出振動腕と前記第3駆動振動腕との間を通る第3連結梁と、前記基部から延出され、前記第2検出振動腕と前記第4駆動振動腕との間を通る第4連結梁と、を備え、
前記基部は、前記第1連結梁、前記第2連結梁、前記第3連結梁、および前記第4連結梁を介して前記第1固定部、及び前記第2固定部と連結されている、
ことを特徴とする請求項5に記載のジャイロ振動片。 - 請求項1ないし請求項6のいずれか一項に記載のジャイロ振動片と、
前記ジャイロ振動片が収納されているパッケージと、を備えていることを特徴とする振動子。 - 請求項1ないし請求項6のいずれか一項に記載のジャイロ振動片と、
少なくとも前記振動片を駆動させる機能を有している回路素子と、を備えていることを特徴とする電子デバイス。 - 請求項1ないし請求項6のいずれか一項に記載のジャイロ振動片を備えていることを特徴とする電子機器。
- 請求項1ないし請求項6のいずれか一項に記載のジャイロ振動片を備えていることを特徴とする移動体。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012206659A JP6074967B2 (ja) | 2012-09-20 | 2012-09-20 | 振動片、振動子、電子デバイス、電子機器、および移動体 |
| US14/027,574 US9379307B2 (en) | 2012-09-20 | 2013-09-16 | Vibrator element, vibrator, electronic device, electronic apparatus, and moving object |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012206659A JP6074967B2 (ja) | 2012-09-20 | 2012-09-20 | 振動片、振動子、電子デバイス、電子機器、および移動体 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014062753A JP2014062753A (ja) | 2014-04-10 |
| JP2014062753A5 JP2014062753A5 (ja) | 2015-08-27 |
| JP6074967B2 true JP6074967B2 (ja) | 2017-02-08 |
Family
ID=50273753
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012206659A Active JP6074967B2 (ja) | 2012-09-20 | 2012-09-20 | 振動片、振動子、電子デバイス、電子機器、および移動体 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9379307B2 (ja) |
| JP (1) | JP6074967B2 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014021038A (ja) | 2012-07-23 | 2014-02-03 | Seiko Epson Corp | 振動片、振動片の製造方法、振動子、電子デバイス、電子機器、および移動体 |
| WO2014091976A1 (ja) * | 2012-12-11 | 2014-06-19 | 株式会社村田製作所 | 角速度検出素子 |
| JP6222425B2 (ja) * | 2013-04-24 | 2017-11-01 | セイコーエプソン株式会社 | 物理量検出回路、物理量検出装置、電子機器及び移動体 |
| JP6264839B2 (ja) * | 2013-10-29 | 2018-01-24 | セイコーエプソン株式会社 | 振動素子、振動子、発振器、電子機器および移動体 |
| JP6318590B2 (ja) * | 2013-12-05 | 2018-05-09 | セイコーエプソン株式会社 | 振動素子、振動子、振動デバイス、電子機器および移動体 |
| JP6579778B2 (ja) * | 2014-05-14 | 2019-09-25 | キヤノン株式会社 | 振動型駆動装置、振動型駆動装置を備える交換用レンズ、撮像装置、及び振動型駆動装置の製造方法 |
| JP6492536B2 (ja) * | 2014-10-28 | 2019-04-03 | セイコーエプソン株式会社 | センサー素子、物理量センサー、電子機器および移動体 |
| JP6477101B2 (ja) * | 2015-03-23 | 2019-03-06 | セイコーエプソン株式会社 | 角速度検出素子、角速度検出デバイス、電子機器および移動体 |
| JP6477100B2 (ja) * | 2015-03-23 | 2019-03-06 | セイコーエプソン株式会社 | 角速度検出素子、角速度検出デバイス、電子機器および移動体 |
| JP6819216B2 (ja) * | 2016-10-26 | 2021-01-27 | セイコーエプソン株式会社 | ジャイロセンサー、ジャイロセンサーの製造方法、電子機器および移動体 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09127151A (ja) * | 1995-11-01 | 1997-05-16 | Murata Mfg Co Ltd | 加速度センサ |
| JP2001330623A (ja) * | 2000-03-16 | 2001-11-30 | Denso Corp | 半導体力学量センサ |
| JP2005156457A (ja) | 2003-11-27 | 2005-06-16 | Ngk Insulators Ltd | 振動子、電子機器および物理量測定装置 |
| JP4381354B2 (ja) * | 2004-09-10 | 2009-12-09 | セイコーエプソン株式会社 | 振動子の支持構造および物理量測定装置 |
| JP4415382B2 (ja) * | 2005-01-20 | 2010-02-17 | セイコーエプソン株式会社 | 振動ジャイロ素子、振動ジャイロ素子の支持構造およびジャイロセンサ |
| JP4848873B2 (ja) | 2006-07-20 | 2011-12-28 | セイコーエプソン株式会社 | ジャイロ振動片 |
| JP5050448B2 (ja) | 2006-08-30 | 2012-10-17 | セイコーエプソン株式会社 | 角速度センサおよび電子機器 |
| JP2008256669A (ja) * | 2006-10-30 | 2008-10-23 | Sony Corp | 角速度センサ及び電子機器 |
| JP2008151633A (ja) | 2006-12-18 | 2008-07-03 | Epson Toyocom Corp | 角速度センサの製造方法 |
| JP2010169457A (ja) * | 2009-01-21 | 2010-08-05 | Epson Toyocom Corp | 圧電振動片および物理量検出装置 |
| JP2010256332A (ja) | 2009-04-02 | 2010-11-11 | Seiko Epson Corp | 振動片、振動子および物理量検出装置 |
| JP2013178179A (ja) * | 2012-02-28 | 2013-09-09 | Seiko Epson Corp | センサー素子、センサーデバイスおよび電子機器 |
| JP2014021038A (ja) * | 2012-07-23 | 2014-02-03 | Seiko Epson Corp | 振動片、振動片の製造方法、振動子、電子デバイス、電子機器、および移動体 |
| JP6171475B2 (ja) * | 2013-03-28 | 2017-08-02 | セイコーエプソン株式会社 | 振動片の製造方法 |
| JP2015090275A (ja) * | 2013-11-05 | 2015-05-11 | セイコーエプソン株式会社 | 振動素子の製造方法 |
| JP6399283B2 (ja) * | 2014-03-24 | 2018-10-03 | セイコーエプソン株式会社 | 物理量検出装置、電子機器及び移動体 |
-
2012
- 2012-09-20 JP JP2012206659A patent/JP6074967B2/ja active Active
-
2013
- 2013-09-16 US US14/027,574 patent/US9379307B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014062753A (ja) | 2014-04-10 |
| US20140077664A1 (en) | 2014-03-20 |
| US9379307B2 (en) | 2016-06-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6074967B2 (ja) | 振動片、振動子、電子デバイス、電子機器、および移動体 | |
| US10794778B2 (en) | Physical quantity detecting device, electronic apparatus, and moving object | |
| EP2690400A2 (en) | Vibrator element, method of manufacturing vibrator element, vibrator, electronic device, electronic apparatus and moving body | |
| JP6435596B2 (ja) | 振動素子、振動デバイス、電子機器、および移動体 | |
| JP2015184157A (ja) | 物理量検出回路、物理量検出装置、電子機器及び移動体 | |
| JP2015087262A (ja) | 振動素子、振動子、電子機器および移動体 | |
| US11307033B2 (en) | Vibrator device, electronic apparatus, and vehicle | |
| JP2016090254A (ja) | 振動素子、電子デバイス、電子機器、および移動体 | |
| JP6432652B2 (ja) | 振動片の製造方法 | |
| JP2019102857A (ja) | 振動デバイス、電子機器および移動体 | |
| JP2015230272A (ja) | 機能素子、電子機器、および移動体 | |
| JP2019178904A (ja) | 振動素子、振動素子の製造方法、物理量センサー、慣性計測装置、電子機器および移動体 | |
| JP2015203583A (ja) | 振動素子、電子機器、および移動体 | |
| US9246470B2 (en) | Vibrating element, vibrator, oscillator, electronic apparatus, and moving object | |
| JP2014092500A (ja) | 振動片、振動子、電子デバイス、電子機器、および移動体 | |
| JP6569257B2 (ja) | 振動素子、電子デバイス、電子機器、および移動体 | |
| JP2016186479A (ja) | 物理量検出振動素子、物理量検出振動子、電子機器および移動体 | |
| JP2016017768A (ja) | センサー素子、センサーデバイス、電子機器および移動体 | |
| JP2014178165A (ja) | 振動素子、振動子、電子デバイス、電子機器、および移動体 | |
| JP2019161525A (ja) | 振動デバイス、電子機器および移動体 | |
| JP2014200052A (ja) | 振動片、振動子、発振器、電子機器および移動体 | |
| JP2016061710A (ja) | 振動素子、ジャイロ素子、電子デバイス、電子機器、および移動体 | |
| JP2015114253A (ja) | 振動素子、振動子、電子デバイス、電子機器、および移動体 | |
| JP2014025742A (ja) | 振動片、ジャイロセンサー、電子機器、および移動体 | |
| JP6264842B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20150108 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150709 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150709 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160526 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160531 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20160610 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20160624 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160726 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161213 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161226 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6074967 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |