JP2016017768A - センサー素子、センサーデバイス、電子機器および移動体 - Google Patents
センサー素子、センサーデバイス、電子機器および移動体 Download PDFInfo
- Publication number
- JP2016017768A JP2016017768A JP2014138838A JP2014138838A JP2016017768A JP 2016017768 A JP2016017768 A JP 2016017768A JP 2014138838 A JP2014138838 A JP 2014138838A JP 2014138838 A JP2014138838 A JP 2014138838A JP 2016017768 A JP2016017768 A JP 2016017768A
- Authority
- JP
- Japan
- Prior art keywords
- vibrating arm
- detection
- arm
- sensor element
- drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000001514 detection method Methods 0.000 claims abstract description 201
- 230000007547 defect Effects 0.000 claims description 46
- 239000000463 material Substances 0.000 claims description 35
- 239000000470 constituent Substances 0.000 claims description 16
- 238000012217 deletion Methods 0.000 claims description 12
- 230000037430 deletion Effects 0.000 claims description 12
- 230000035945 sensitivity Effects 0.000 abstract description 10
- 230000002950 deficient Effects 0.000 abstract description 3
- 230000008878 coupling Effects 0.000 abstract 5
- 238000010168 coupling process Methods 0.000 abstract 5
- 238000005859 coupling reaction Methods 0.000 abstract 5
- 239000010410 layer Substances 0.000 description 149
- 239000010931 gold Substances 0.000 description 26
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 21
- XLOMVQKBTHCTTD-UHFFFAOYSA-N Zinc monoxide Chemical compound [Zn]=O XLOMVQKBTHCTTD-UHFFFAOYSA-N 0.000 description 20
- 230000006870 function Effects 0.000 description 16
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 16
- 229910052737 gold Inorganic materials 0.000 description 16
- 239000011651 chromium Substances 0.000 description 14
- 239000010936 titanium Substances 0.000 description 14
- 238000005452 bending Methods 0.000 description 13
- 239000010955 niobium Substances 0.000 description 12
- 239000010949 copper Substances 0.000 description 10
- 239000012212 insulator Substances 0.000 description 10
- 229910001020 Au alloy Inorganic materials 0.000 description 9
- 229910052804 chromium Inorganic materials 0.000 description 9
- PMHQVHHXPFUNSP-UHFFFAOYSA-M copper(1+);methylsulfanylmethane;bromide Chemical compound Br[Cu].CSC PMHQVHHXPFUNSP-UHFFFAOYSA-M 0.000 description 9
- 239000003353 gold alloy Substances 0.000 description 9
- 229910052719 titanium Inorganic materials 0.000 description 9
- 239000011787 zinc oxide Substances 0.000 description 9
- 229910052451 lead zirconate titanate Inorganic materials 0.000 description 8
- HFGPZNIAWCZYJU-UHFFFAOYSA-N lead zirconate titanate Chemical compound [O-2].[O-2].[O-2].[O-2].[O-2].[Ti+4].[Zr+4].[Pb+2] HFGPZNIAWCZYJU-UHFFFAOYSA-N 0.000 description 8
- 238000000034 method Methods 0.000 description 8
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 8
- 239000007772 electrode material Substances 0.000 description 7
- 229910052758 niobium Inorganic materials 0.000 description 7
- GUCVJGMIXFAOAE-UHFFFAOYSA-N niobium atom Chemical compound [Nb] GUCVJGMIXFAOAE-UHFFFAOYSA-N 0.000 description 7
- 229910052697 platinum Inorganic materials 0.000 description 7
- 229910052709 silver Inorganic materials 0.000 description 7
- 239000004332 silver Substances 0.000 description 7
- 229910052581 Si3N4 Inorganic materials 0.000 description 6
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 6
- 230000002411 adverse Effects 0.000 description 6
- 239000010408 film Substances 0.000 description 6
- 229910052751 metal Inorganic materials 0.000 description 6
- 239000002184 metal Substances 0.000 description 6
- HQVNEWCFYHHQES-UHFFFAOYSA-N silicon nitride Chemical compound N12[Si]34N5[Si]62N3[Si]51N64 HQVNEWCFYHHQES-UHFFFAOYSA-N 0.000 description 6
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 description 6
- 229910052721 tungsten Inorganic materials 0.000 description 6
- 239000010937 tungsten Substances 0.000 description 6
- 229910001316 Ag alloy Inorganic materials 0.000 description 5
- 229910000838 Al alloy Inorganic materials 0.000 description 5
- VYZAMTAEIAYCRO-UHFFFAOYSA-N Chromium Chemical compound [Cr] VYZAMTAEIAYCRO-UHFFFAOYSA-N 0.000 description 5
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 5
- 229910000599 Cr alloy Inorganic materials 0.000 description 5
- -1 ITO Chemical compound 0.000 description 5
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 5
- ZOKXTWBITQBERF-UHFFFAOYSA-N Molybdenum Chemical compound [Mo] ZOKXTWBITQBERF-UHFFFAOYSA-N 0.000 description 5
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 5
- 229910052782 aluminium Inorganic materials 0.000 description 5
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 5
- 239000000788 chromium alloy Substances 0.000 description 5
- 229910017052 cobalt Inorganic materials 0.000 description 5
- 239000010941 cobalt Substances 0.000 description 5
- GUTLYIVDDKVIGB-UHFFFAOYSA-N cobalt atom Chemical compound [Co] GUTLYIVDDKVIGB-UHFFFAOYSA-N 0.000 description 5
- 229910052802 copper Inorganic materials 0.000 description 5
- 230000005284 excitation Effects 0.000 description 5
- 238000003384 imaging method Methods 0.000 description 5
- 229910052750 molybdenum Inorganic materials 0.000 description 5
- 239000011733 molybdenum Substances 0.000 description 5
- 239000010453 quartz Substances 0.000 description 5
- VSZWPYCFIRKVQL-UHFFFAOYSA-N selanylidenegallium;selenium Chemical compound [Se].[Se]=[Ga].[Se]=[Ga] VSZWPYCFIRKVQL-UHFFFAOYSA-N 0.000 description 5
- JBQYATWDVHIOAR-UHFFFAOYSA-N tellanylidenegermanium Chemical compound [Te]=[Ge] JBQYATWDVHIOAR-UHFFFAOYSA-N 0.000 description 5
- 229910004298 SiO 2 Inorganic materials 0.000 description 4
- 239000000853 adhesive Substances 0.000 description 4
- 230000001070 adhesive effect Effects 0.000 description 4
- 239000013078 crystal Substances 0.000 description 4
- 238000005530 etching Methods 0.000 description 4
- 238000005304 joining Methods 0.000 description 4
- 239000007769 metal material Substances 0.000 description 4
- 230000010287 polarization Effects 0.000 description 4
- WSMQKESQZFQMFW-UHFFFAOYSA-N 5-methyl-pyrazole-3-carboxylic acid Chemical compound CC1=CC(C(O)=O)=NN1 WSMQKESQZFQMFW-UHFFFAOYSA-N 0.000 description 3
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 3
- 229910002113 barium titanate Inorganic materials 0.000 description 3
- JRPBQTZRNDNNOP-UHFFFAOYSA-N barium titanate Chemical compound [Ba+2].[Ba+2].[O-][Ti]([O-])([O-])[O-] JRPBQTZRNDNNOP-UHFFFAOYSA-N 0.000 description 3
- 238000004891 communication Methods 0.000 description 3
- 230000005484 gravity Effects 0.000 description 3
- 238000010030 laminating Methods 0.000 description 3
- GQYHUHYESMUTHG-UHFFFAOYSA-N lithium niobate Chemical compound [Li+].[O-][Nb](=O)=O GQYHUHYESMUTHG-UHFFFAOYSA-N 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 3
- 238000000926 separation method Methods 0.000 description 3
- 229910052710 silicon Inorganic materials 0.000 description 3
- 239000010703 silicon Substances 0.000 description 3
- 229910052814 silicon oxide Inorganic materials 0.000 description 3
- 238000003466 welding Methods 0.000 description 3
- PIGFYZPCRLYGLF-UHFFFAOYSA-N Aluminum nitride Chemical compound [Al]#N PIGFYZPCRLYGLF-UHFFFAOYSA-N 0.000 description 2
- 229910013641 LiNbO 3 Inorganic materials 0.000 description 2
- ZLMJMSJWJFRBEC-UHFFFAOYSA-N Potassium Chemical compound [K] ZLMJMSJWJFRBEC-UHFFFAOYSA-N 0.000 description 2
- 239000002253 acid Substances 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 230000001413 cellular effect Effects 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 230000006866 deterioration Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- PSHMSSXLYVAENJ-UHFFFAOYSA-N dilithium;[oxido(oxoboranyloxy)boranyl]oxy-oxoboranyloxyborinate Chemical compound [Li+].[Li+].O=BOB([O-])OB([O-])OB=O PSHMSSXLYVAENJ-UHFFFAOYSA-N 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000005684 electric field Effects 0.000 description 2
- 239000011261 inert gas Substances 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 230000003647 oxidation Effects 0.000 description 2
- 238000007254 oxidation reaction Methods 0.000 description 2
- 229910052700 potassium Inorganic materials 0.000 description 2
- 239000011591 potassium Substances 0.000 description 2
- 239000011241 protective layer Substances 0.000 description 2
- 238000005546 reactive sputtering Methods 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 238000003860 storage Methods 0.000 description 2
- 239000010409 thin film Substances 0.000 description 2
- 239000004925 Acrylic resin Substances 0.000 description 1
- 229920000178 Acrylic resin Polymers 0.000 description 1
- 241000251468 Actinopterygii Species 0.000 description 1
- WQZGKKKJIJFFOK-GASJEMHNSA-N Glucose Natural products OC[C@H]1OC(O)[C@H](O)[C@@H](O)[C@@H]1O WQZGKKKJIJFFOK-GASJEMHNSA-N 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 229910045601 alloy Inorganic materials 0.000 description 1
- 239000000956 alloy Substances 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 239000008280 blood Substances 0.000 description 1
- 210000004369 blood Anatomy 0.000 description 1
- 230000036772 blood pressure Effects 0.000 description 1
- 238000005219 brazing Methods 0.000 description 1
- 239000011231 conductive filler Substances 0.000 description 1
- 239000003822 epoxy resin Substances 0.000 description 1
- 239000008103 glucose Substances 0.000 description 1
- 229910000833 kovar Inorganic materials 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 239000002923 metal particle Substances 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- 230000001590 oxidative effect Effects 0.000 description 1
- 230000003071 parasitic effect Effects 0.000 description 1
- 238000000059 patterning Methods 0.000 description 1
- 238000007747 plating Methods 0.000 description 1
- 229920000647 polyepoxide Polymers 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 229910000679 solder Inorganic materials 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- RIUWBIIVUYSTCN-UHFFFAOYSA-N trilithium borate Chemical compound [Li+].[Li+].[Li+].[O-]B([O-])[O-] RIUWBIIVUYSTCN-UHFFFAOYSA-N 0.000 description 1
Images






Landscapes
- Gyroscopes (AREA)
Abstract
Description
この振動子では、固定部において支持、固定されている。
この振動ジャイロ素子では、1対の支持部において支持、固定されている。
本発明のセンサー素子は、互いに直交する2つの方向を第1方向および第2方向とするとき、
基部と、
前記基部から前記第1方向に沿っており、かつ互いに逆方向に向かって延出する第1検出用振動腕および第2検出用振動腕と、
前記基部から前記第2方向に沿っており、かつ互いに逆方向に向かって延出する第1連結腕および第2連結腕と、
前記第1連結腕から前記第1方向に沿っており、かつ互いに逆方向に向かって延出する第1駆動用振動腕および第2駆動用振動腕と、
前記第2連結腕から前記第1方向に沿っており、かつ互いに逆方向に向かって延出する第3駆動用振動腕および第4駆動用振動腕と、
前記第1方向において、前記第1駆動用振動腕、前記第2駆動用振動腕、前記第3駆動用振動腕および前記第4駆動用振動腕を挟んで並ぶ第1支持部および第2支持部と、
前記第1支持部と前記基部とを連結する第1梁と、
前記第2支持部と前記基部とを連結する第2梁と、
を有し、
前記第1支持部は、その構成材料が部分的に除去された第1欠損部を備えており、前記第1検出用振動腕の一部が前記第1欠損部に入り込んでいることを特徴とする。
本発明のセンサー素子では、前記第2支持部は、その構成材料が部分的に除去された第2欠損部を備えており、前記第2検出用振動腕の一部が前記第2欠損部に入り込んでいることが好ましい。
本発明のセンサー素子では、前記第1支持部は、前記第2方向において前記第1欠損部により2つに分離されていることが好ましい。
本発明のセンサー素子では、前記第1支持部は、前記第1方向における長さが長い部分とそれより短い部分とを含んでおり、前記短い部分が前記第1欠損部に対応していることが好ましい。
本発明のセンサー素子では、前記第1検出用振動腕の先端は、前記第1方向において、前記第1駆動用振動腕の先端および前記第3駆動用振動腕の先端を境にして前記基部側とは反対側に位置しており、
前記第2検出用振動腕の先端は、前記第1方向において、前記第2駆動用振動腕の先端および前記第4駆動用振動腕の先端を境にして前記基部側とは反対側に位置していることが好ましい。
本発明のセンサー素子では、前記第1支持部の前記第2方向における外縁は、前記第1駆動用振動腕の前記第2方向における外縁および前記第3駆動用振動腕の前記第2方向における外縁よりも前記基部側にそれぞれ位置しており、
前記第2支持部の前記第2方向における外縁は、前記第2駆動用振動腕の前記第2方向における外縁および前記第4駆動用振動腕の前記第2方向における外縁よりも前記基部側にそれぞれ位置していることが好ましい。
本発明のセンサーデバイスは、本発明のセンサー素子と、前記センサー素子を収納するパッケージと、を備えることを特徴とする。
これにより、信頼性の高いセンサーデバイスが得られる。
本発明の電子機器は、本発明のセンサーデバイスを備えることを特徴とする。
これにより、信頼性の高い電子機器が得られる。
本発明の移動体は、本発明のセンサーデバイスを備えることを特徴とする。
これにより、信頼性の高い移動体が得られる。
<第1実施形態>
まず、本発明のセンサーデバイス(本発明のセンサー素子を備えるセンサーデバイス)の第1実施形態について説明する。
センサー素子2は、z軸まわりの角速度を検出する「面外検出型」のセンサー素子(振動片)である。このセンサー素子2は、図3に示すように、複数の振動腕を有する振動体20と、振動体20の表面に設けられた複数の検出部41〜44、複数の駆動部51〜58、および複数の端子61〜66とを備える。
[振動片]
まず、振動体20について説明する。
振動体20は、いわゆるダブルT型と呼ばれる構造を有する。
次に、駆動部について説明する。
図3(a)に示すセンサー素子2の駆動部については、互いに同等の構成であるので、以下の説明では、駆動部51の構成を例に挙げて説明する。
なお、上述の溝については存在しない構成であっても構わない。
かかる下地層は、例えば、Ti、Cr等で構成されている。
かかる下地層は、例えば、Ti、Cr等で構成されている。
次に、検出部について説明する。
図3(a)に示すセンサー素子2の検出部については、互いに同等の構成であるので、以下の説明では、検出部41の構成を例に挙げて説明する。
なお、上述の溝については存在しない構成であっても構わない。
そして、これら検出電極によって電荷が検出され、センサーの検出信号が出力される。
(b)中左側)に検出部42が設けられている。同様に、1対の検出部43、44は、第2検出用振動腕24の幅方向(x軸方向)において、一方側(図3(b)中右側)に検出部43が設けられ、他方側(図3(b)中左側)に検出部44が設けられている。
かかる下地層は、例えば、Ti、Cr等で構成されている。
かかる下地層は、例えば、Ti、Cr等で構成されている。
第1支持部221は、第1駆動用振動腕25および第3駆動用振動腕27のーy側に位置している。一方、第2支持部222は、第2駆動用振動腕26および第4駆動用振動腕28の+y側に位置している。すなわち、第1支持部221および第2支持部222は、第1駆動用振動腕25、第2駆動用振動腕26、第3駆動用振動腕27および第4駆動用振動腕28を挟んでy軸方向に並んでいる。
端子61〜63は、前述した第1支持部221上に設けられている。具体的には、端子61は、前述した第1固定部221a上に設けられ、端子62、63は、第1固定部221b上に設けられている。
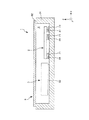
図1および図2に示すICチップ3は、前述したセンサー素子2を駆動する機能と、センサー素子2からの出力(センサー出力)を検出する機能とを有する電子部品である。
また、ICチップ3には、複数の接続端子31が設けられている。
パッケージ9は、センサー素子2およびICチップ3を収納するものである。
また、このようなセンサー素子2を備えるセンサーデバイス1は、信頼性に優れる。
次に、本発明のセンサー素子の第2実施形態について説明する。
なお、図6では、説明の便宜上、互いに直交する3軸として、x軸、y軸およびz軸を図示しており、その図示した矢印の先端側を「+側」、基端側を「−側」とする。また、以下では、x軸に平行な方向を「x軸方向」と言い、y軸に平行な方向を「y軸方向」と言い、z軸に平行な方向を「z軸方向」と言う。
以上のような本実施形態においても、第1実施形態と同様の作用、効果が得られる。
次いで、本発明のセンサーデバイスを備える電子機器(本発明の電子機器)について、図7〜図9に基づき、詳細に説明する。
次に、本発明のセンサーデバイスを備える移動体(本発明の移動体)について説明する。
2 センサー素子
3 ICチップ
9 パッケージ
20 振動体
21 基部
23 第1検出用振動腕
24 第2検出用振動腕
25 第1駆動用振動腕
26 第2駆動用振動腕
27 第3駆動用振動腕
28 第4駆動用振動腕
29 絶縁体層
31 接続端子
41 検出部
41−1 検出部
42 検出部
43 検出部
44 検出部
51 駆動部
51−1 駆動部
52 駆動部
53 駆動部
54 駆動部
55 駆動部
56 駆動部
57 駆動部
58 駆動部
61 端子
62 端子
63 端子
64 端子
65 端子
66 端子
71 内部端子
72 内部端子
81 導電性固定部材
82 接合部材
91 ベース
92 リッド
100 表示部
211 第1連結腕
212 第2連結腕
221 第1支持部
221a 第1固定部
221ax 縁部
221b 第1固定部
221bx 縁部
221c 欠損部
221d 連結部
222 第2支持部
222a 第2固定部
222ax 縁部
222b 第2固定部
222bx 縁部
222c 欠損部
222d 連結部
223 第1梁部
224 第1梁部
225 第2梁部
226 第2梁部
231 錘部
241 錘部
251 錘部
251x 縁部
261 錘部
261x 縁部
271 錘部
271x 縁部
281 錘部
281x 縁部
411 第1の電極層
412 圧電体層
413 第2の電極層
421 第1の電極層
422 圧電体層
423 第2の電極層
511 第1の電極層
512 圧電体層
513 第2の電極層
521 第1の電極層
522 圧電体層
523 第2の電極層
1100 パーソナルコンピューター
1102 キーボード
1104 本体部
1106 表示ユニット
1200 携帯電話機
1202 操作ボタン
1204 受話口
1206 送話口
1300 ディジタルスチルカメラ
1302 ケース
1304 受光ユニット
1306 シャッターボタン
1308 メモリー
1312 ビデオ信号出力端子
1314 入出力端子
1430 テレビモニター
1440 パーソナルコンピューター
1500 自動車
G 重心
S 収納空間
ω 角速度
Claims (9)
- 互いに直交する2つの方向を第1方向および第2方向とするとき、
基部と、
前記基部から前記第1方向に沿っており、かつ互いに逆方向に向かって延出する第1検出用振動腕および第2検出用振動腕と、
前記基部から前記第2方向に沿っており、かつ互いに逆方向に向かって延出する第1連結腕および第2連結腕と、
前記第1連結腕から前記第1方向に沿っており、かつ互いに逆方向に向かって延出する第1駆動用振動腕および第2駆動用振動腕と、
前記第2連結腕から前記第1方向に沿っており、かつ互いに逆方向に向かって延出する第3駆動用振動腕および第4駆動用振動腕と、
前記第1方向において、前記第1駆動用振動腕、前記第2駆動用振動腕、前記第3駆動用振動腕および前記第4駆動用振動腕を挟んで並ぶ第1支持部および第2支持部と、
前記第1支持部と前記基部とを連結する第1梁と、
前記第2支持部と前記基部とを連結する第2梁と、
を有し、
前記第1支持部は、その構成材料が部分的に除去された第1欠損部を備えており、前記第1検出用振動腕の一部が前記第1欠損部に入り込んでいることを特徴とするセンサー素子。 - 前記第2支持部は、その構成材料が部分的に除去された第2欠損部を備えており、前記第2検出用振動腕の一部が前記第2欠損部に入り込んでいる請求項1に記載のセンサー素子。
- 前記第1支持部は、前記第2方向において前記第1欠損部により2つに分離されている請求項1または2に記載のセンサー素子。
- 前記第1支持部は、前記第1方向における長さが長い部分とそれより短い部分とを含んでおり、前記短い部分が前記第1欠損部に対応している請求項1または2に記載のセンサー素子。
- 前記第1検出用振動腕の先端は、前記第1方向において、前記第1駆動用振動腕の先端および前記第3駆動用振動腕の先端を境にして前記基部側とは反対側に位置しており、
前記第2検出用振動腕の先端は、前記第1方向において、前記第2駆動用振動腕の先端および前記第4駆動用振動腕の先端を境にして前記基部側とは反対側に位置している請求項1ないし4のいずれか1項に記載のセンサー素子。 - 前記第1支持部の前記第2方向における外縁は、前記第1駆動用振動腕の前記第2方向における外縁および前記第3駆動用振動腕の前記第2方向における外縁よりも前記基部側にそれぞれ位置しており、
前記第2支持部の前記第2方向における外縁は、前記第2駆動用振動腕の前記第2方向における外縁および前記第4駆動用振動腕の前記第2方向における外縁よりも前記基部側にそれぞれ位置している請求項1ないし5のいずれか1項に記載のセンサー素子。 - 請求項1ないし6のいずれか1項に記載のセンサー素子と、前記センサー素子を収納するパッケージと、を備えることを特徴とするセンサーデバイス。
- 請求項7に記載のセンサーデバイスを備えることを特徴とする電子機器。
- 請求項7に記載のセンサーデバイスを備えることを特徴とする移動体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014138838A JP2016017768A (ja) | 2014-07-04 | 2014-07-04 | センサー素子、センサーデバイス、電子機器および移動体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014138838A JP2016017768A (ja) | 2014-07-04 | 2014-07-04 | センサー素子、センサーデバイス、電子機器および移動体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016017768A true JP2016017768A (ja) | 2016-02-01 |
| JP2016017768A5 JP2016017768A5 (ja) | 2017-07-27 |
Family
ID=55233091
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014138838A Withdrawn JP2016017768A (ja) | 2014-07-04 | 2014-07-04 | センサー素子、センサーデバイス、電子機器および移動体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2016017768A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018048897A (ja) * | 2016-09-21 | 2018-03-29 | 株式会社東芝 | センサ及びセンサパッケージ |
| CN108731659A (zh) * | 2018-05-25 | 2018-11-02 | 中国电子科技集团公司第二十九研究所 | 一种多检测振动单元微惯性导航陀螺仪 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005062160A (ja) * | 2003-07-25 | 2005-03-10 | Seiko Epson Corp | 圧電振動片、圧電振動片の支持構造、圧電振動子及び振動型圧電ジャイロスコープ |
| JP2014089049A (ja) * | 2012-10-29 | 2014-05-15 | Tdk Corp | 角速度センサ |
-
2014
- 2014-07-04 JP JP2014138838A patent/JP2016017768A/ja not_active Withdrawn
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005062160A (ja) * | 2003-07-25 | 2005-03-10 | Seiko Epson Corp | 圧電振動片、圧電振動片の支持構造、圧電振動子及び振動型圧電ジャイロスコープ |
| JP2014089049A (ja) * | 2012-10-29 | 2014-05-15 | Tdk Corp | 角速度センサ |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018048897A (ja) * | 2016-09-21 | 2018-03-29 | 株式会社東芝 | センサ及びセンサパッケージ |
| US10473685B2 (en) | 2016-09-21 | 2019-11-12 | Kabushiki Kaisha Toshiba | Sensor and sensor package |
| CN108731659A (zh) * | 2018-05-25 | 2018-11-02 | 中国电子科技集团公司第二十九研究所 | 一种多检测振动单元微惯性导航陀螺仪 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN105322908B (zh) | 电子器件、电子设备和移动体 | |
| JP6435596B2 (ja) | 振動素子、振動デバイス、電子機器、および移動体 | |
| JP6107330B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP6435606B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| US20130221804A1 (en) | Sensor Element, Sensor Device, And Electronic Apparatus | |
| JP2013192013A (ja) | 振動素子、振動デバイスおよび電子機器 | |
| JP6318550B2 (ja) | 振動片、角速度センサー、電子機器および移動体 | |
| US9048418B2 (en) | Sensor element, sensor device, and electronic apparatus | |
| JP6287208B2 (ja) | 振動子、発振器、電子機器、物理量センサーおよび移動体 | |
| JP2016017768A (ja) | センサー素子、センサーデバイス、電子機器および移動体 | |
| JP6083110B2 (ja) | 振動素子、振動デバイス、ジャイロセンサーおよび電子機器 | |
| JP2018093553A (ja) | 電子デバイス、電子機器および移動体 | |
| JP6498379B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP2014192797A (ja) | 振動片、振動素子、振動子、電子機器、および移動体 | |
| JP6264839B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP2015179933A (ja) | 振動素子、ジャイロセンサー素子、電子デバイス、電子機器および移動体 | |
| JP6340774B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP2013195239A (ja) | センサー素子、センサー素子の製造方法、センサーデバイスおよび電子機器 | |
| JP2016061710A (ja) | 振動素子、ジャイロ素子、電子デバイス、電子機器、および移動体 | |
| JP6939007B2 (ja) | センサー、電子機器および移動体 | |
| JP6834480B2 (ja) | 振動片の製造方法、振動片、振動子、電子機器および移動体 | |
| JP2013219252A (ja) | 振動片、振動デバイスおよび電子機器 | |
| JP6264842B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP2013181940A (ja) | ジャイロセンサーおよび電子機器 | |
| JP2013170851A (ja) | センサー素子、センサー素子の製造方法、センサーデバイスおよび電子機器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170612 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170612 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180425 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180508 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20180615 |