JP5956782B2 - 撮像素子及び撮像装置 - Google Patents
撮像素子及び撮像装置 Download PDFInfo
- Publication number
- JP5956782B2 JP5956782B2 JP2012045788A JP2012045788A JP5956782B2 JP 5956782 B2 JP5956782 B2 JP 5956782B2 JP 2012045788 A JP2012045788 A JP 2012045788A JP 2012045788 A JP2012045788 A JP 2012045788A JP 5956782 B2 JP5956782 B2 JP 5956782B2
- Authority
- JP
- Japan
- Prior art keywords
- pixel
- photoelectric conversion
- image
- focus detection
- focus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images
































Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
- H04N13/207—Image signal generators using stereoscopic image cameras using a single two-dimensional [2D] image sensor
- H04N13/218—Image signal generators using stereoscopic image cameras using a single two-dimensional [2D] image sensor using spatial multiplexing
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/703—SSIS architectures incorporating pixels for producing signals other than image signals
- H04N25/704—Pixels specially adapted for focusing, e.g. phase difference pixel sets
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/67—Focus control based on electronic image sensor signals
- H04N23/672—Focus control based on electronic image sensor signals based on the phase difference signals
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/67—Focus control based on electronic image sensor signals
- H04N23/675—Focus control based on electronic image sensor signals comprising setting of focusing regions
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10F—INORGANIC SEMICONDUCTOR DEVICES SENSITIVE TO INFRARED RADIATION, LIGHT, ELECTROMAGNETIC RADIATION OF SHORTER WAVELENGTH OR CORPUSCULAR RADIATION
- H10F39/00—Integrated devices, or assemblies of multiple devices, comprising at least one element covered by group H10F30/00, e.g. radiation detectors comprising photodiode arrays
- H10F39/80—Constructional details of image sensors
- H10F39/802—Geometry or disposition of elements in pixels, e.g. address-lines or gate electrodes
- H10F39/8023—Disposition of the elements in pixels, e.g. smaller elements in the centre of the imager compared to larger elements at the periphery
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/28—Systems for automatic generation of focusing signals
- G02B7/34—Systems for automatic generation of focusing signals using different areas in a pupil plane
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/61—Control of cameras or camera modules based on recognised objects
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Focusing (AREA)
- Automatic Focus Adjustment (AREA)
- Studio Devices (AREA)
- Transforming Light Signals Into Electric Signals (AREA)
Description
図1は本発明における撮像素子を有する撮像装置であるデジタルカメラの概略構成を示したもので、撮像素子を有したカメラ本体と撮影光学系が一体化又は接続されたデジタルカメラを示しており、動画及び静止画が記録可能である。同図において、101は撮影光学系(結像光学系)の先端に配置された第1レンズ群で、光軸方向に進退可能に保持される。102は絞りで、その開口径を調節することで撮影時の光量調節を行うほか、静止画撮影時には露光秒時調節用シャッタとしての機能も備える。103は第2レンズ群である。絞り102及び第2レンズ群103は一体となって光軸方向に進退し、第1レンズ群101の進退動作との連動により、変倍機能(ズーム機能)を実現することができる。
θ×DEF=u …(1)
IMab=IMcd>AFb=AFc …(2)
となる。
IMab=IMcd≧AFb=AFc …(3)
となっている。よって、この状態では第1及び第2の画素の信号のうち、いずれを用いてもほぼ同等の焦点検出精度が得られる。
IMab>AFb=AFc>IMcd …(4)
となっている。すなわち、第1の画素211から得られる信号の一方IMcdはその強度が大きく低下しているため、該信号を用いた焦点検出演算は信頼性が低いものとなる。よってこの状態では第2の画素221の信号を用いて焦点検出するのが好ましい。
上述した第1の実施形態においては、第1の画素211の光電変換部はX方向(第1の方向)に2分割(整数m1=2)、Y方向(第2の方向)にも2分割(整数n1=2)された、合計4個の独立した光電変換部211a〜211dを備えていた。そして第2の画素221〜223の光電変換部は、X方向(第1の方向)に4分割(整数m2=4)、Y方向には分割無し(整数n2=1)の、合計4個の独立した光電変換部を備えていた。
上述した第1の実施形態及び第2の実施形態においては、第1から第3の画素における光電変換部の分割個数が等しい構成となっていた。すなわち、第1の実施形態は4分割、第2の実施形態では6分割となっていた。
上述した第1乃至第3の実施形態においては、各画素の光電変換部の分割形態や、焦点検出時の光電変換部の選択方法について説明した。以下に示す第4の実施形態は、本発明の撮像素子を用いて合焦精度を向上させるための実施形態である。
上述した第4の実施形態においては、最初に基線長の短い第2の画素221〜223のいずれかを用いて焦点検出を行い、次いで基線長の長い第1の画素211を用いて焦点検出を行う実施形態を示した。以下に示す第5の実施形態は、基線長の異なる画素で得られた複数の焦点検出結果に対して、各々の結果の信頼性に基づく重み付け係数を乗じて合成したり、複数の結果から信頼性の高い結果を時系列的に採用する実施形態を示す。
θ1<θ2<θ3 ・・・(5)
となっている。なお、図26(b)は第2の画素222の光電変換部を示しているが、第1の画素211と第3の画素225も、瞳分割方向は異なるが同様の大小関係を有し、その出力信号は、第2の画素222と同様に処理することができる。
DEF=DEF(θ1)×C1(FN)×C1(DF)
+DEF(θ2)×C2(FN)×C2(DF)
+DEF(θ3)×C3(FN)×C3(DF) …(6)
そしてこのデフォーカス量DEFに基づいて、フォーカスレンズ駆動量や合焦判定を行う。
上述した第5の実施形態においては、複数の焦点検出信号に重み付け処理を施した結果を最終的な焦点検出情報としていた。以下に示す第5の実施形態の変形例では、複数の焦点検出結果に対して、最も信頼性の高いと思われる結果を択一的に選択する実施形態を示す。
上述した第4の実施形態においては、最初に基線長の短い第2の画素221〜223を用いて焦点検出を行い、次いで基線長の長い第1の画素211を用いて焦点検出を行う例を示した。以下に示す第6の実施形態は、上記概念を拡張し、基線長の数が2を超える場合にも、異なる基線長で得られた複数の焦点検出信号を時系列的に適切に選択もしくは合成する実施形態を示す。
DEF=DEF(θ1)×C1(SN)
+DEF(θ2)×C2(SN)
+DEF(θ3)×C3(SN) …(7)
本第6の実施形態においては、各重み付け係数は0もしくは1であるため、所定回の焦点検出では、複数の焦点検出情報のうち、所定の1つが択一的に選択される。すなわち、1回目の焦点検出時は基線長θ1による焦点検出信号、2回目の焦点検出時は基線長θ2による焦点検出信号、3回目の焦点検出時は基線長θ3による焦点検出信号が採用される。
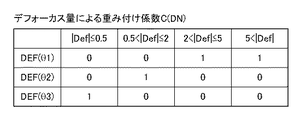
上述した第6の実施形態においては、焦点検出の回数(履歴)に応じて、所定の信号を択一的に選択するものであった。以下に示す第6の実施形態の変形例では、複数の焦点検出結果に対して、履歴に応じた重み付け係数を設定し、複数の結果を合成して用いる実施形態を示す。
Claims (7)
- 撮影光学系により形成された被写体像を検出して記録用画像を生成する第1の撮像画素及び第2の撮像画素と、を有する撮像素子であって、
前記第1の撮像画素は、第1の方向及び前記第1の方向と直交する第2の方向に複数に分割された複数の光電変換部を備え、
前記第2の撮像画素は、前記第1の方向に分割された複数の光電変換部を備え、
前記第1の撮像画素を構成する光電変換部の数と、前記第2の撮像画素を構成する光電変換部の数は、同一であり、
前記複数の光電変換部は、前記撮影光学系からの光束のうち分割された光束により形成された複数の被写体像を光電変換して位相差の検出に用いられる焦点検出信号を出力する機能を備えており、
前記第1の撮像画素を構成する前記複数の光電変換部のうち位相差の検出に用いる光電変換部の基線長は、前記第2の撮像画素を構成する前記複数の光電変換部のうち位相差の検出に用いる光電変換部の基線長より長いことを特徴とする撮像素子。 - 前記第2の撮像画素は、前記第1の方向に4分割された光電変換部を備え、
前記第1の撮像画素は、前記第1の方向及び前記第2の方向にともに2分割された光電変換部を備えていることを特徴とする請求項1に記載の撮像素子。 - デフォーカス量が予め決められた閾値以下の場合、前記第1の撮像画素を用いて位相差の検出を行い、前記デフォーカス量が前記閾値を超える場合、前記第2の撮像画素を用いて位相差の検出を行うことを特徴とする請求項1または2に記載の撮像素子。
- 前記第1の撮像画素を用いて位相差の検出を行うことで得られたデフォーカス量が小さくなる程、該デフォーカス量の重み付け係数の割合を前記第2の撮像画素を用いて位相差の検出を行うことで得られたデフォーカス量の重み付け係数の割合よりも大きくし、前記第2の撮像画素を用いて位相差の検出を行うことで得られたデフォーカス量が大きくなる程、該デフォーカス量の重み付け係数の割合を前記第1の撮像画素を用いて位相差の検出を行うことで得られたデフォーカス量の重み付け係数の割合よりも大きくすることを特徴とする請求項1または2に記載の撮像素子。
- Fナンバーが小さくなる程、前記第1の撮像画素を用いて位相差の検出を行うことで得られたデフォーカス量の重み付け係数の割合を前記第2の撮像画素を用いて位相差の検出を行うことで得られたデフォーカス量の重み付け係数の割合よりも大きくし、前記Fナンバーが大きくなる程、前記第2の撮像画素を用いて位相差の検出を行うことで得られたデフォーカス量の重み付け係数の割合を前記第1の撮像画素を用いて位相差の検出を行うことで得られたデフォーカス量の重み付け係数の割合よりも大きくすることを特徴とする請求項1または2に記載の撮像素子。
- 前記第2の撮像画素の前記4つの光電変換部のうち、前記基線長の短い2個の光電変換部を用いて前記位相差の検出を行った後に、前記第2の撮像画素を構成する前記4つの光電変換部のうち、前記基線長の長い2個の光電変換部を用いて前記位相差の検出を行うことを特徴とする請求項2に記載の撮像素子。
- 請求項1乃至6のいずれか1項に記載の撮像素子と、
前記焦点検出信号を用いて焦点調節を行う焦点調節手段と、
を有することを特徴とする撮像装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012045788A JP5956782B2 (ja) | 2011-05-26 | 2012-03-01 | 撮像素子及び撮像装置 |
| US13/476,161 US9001262B2 (en) | 2011-05-26 | 2012-05-21 | Image sensor and image capturing apparatus |
| CN201210170098.6A CN102801929B (zh) | 2011-05-26 | 2012-05-28 | 图像传感器和摄像设备 |
| US14/629,953 US9204067B2 (en) | 2011-05-26 | 2015-02-24 | Image sensor and image capturing apparatus |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011118397 | 2011-05-26 | ||
| JP2011118397 | 2011-05-26 | ||
| JP2012045788A JP5956782B2 (ja) | 2011-05-26 | 2012-03-01 | 撮像素子及び撮像装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013007998A JP2013007998A (ja) | 2013-01-10 |
| JP2013007998A5 JP2013007998A5 (ja) | 2015-04-16 |
| JP5956782B2 true JP5956782B2 (ja) | 2016-07-27 |
Family
ID=47200885
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012045788A Expired - Fee Related JP5956782B2 (ja) | 2011-05-26 | 2012-03-01 | 撮像素子及び撮像装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (2) | US9001262B2 (ja) |
| JP (1) | JP5956782B2 (ja) |
| CN (1) | CN102801929B (ja) |
Families Citing this family (75)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5161702B2 (ja) * | 2008-08-25 | 2013-03-13 | キヤノン株式会社 | 撮像装置、撮像システム、及び焦点検出方法 |
| JP5744545B2 (ja) * | 2011-01-31 | 2015-07-08 | キヤノン株式会社 | 固体撮像装置およびカメラ |
| EP2685711B1 (en) * | 2011-03-09 | 2017-08-30 | Fujifilm Corporation | Color image pickup device |
| JP5979849B2 (ja) * | 2011-11-21 | 2016-08-31 | キヤノン株式会社 | 撮像素子及び撮像装置 |
| JP5917125B2 (ja) * | 2011-12-16 | 2016-05-11 | キヤノン株式会社 | 画像処理装置、画像処理方法、撮像装置および表示装置 |
| JP5898501B2 (ja) * | 2012-01-13 | 2016-04-06 | キヤノン株式会社 | 画像処理装置、撮像装置、制御方法、プログラム及び記録媒体 |
| JP5979961B2 (ja) * | 2012-05-07 | 2016-08-31 | キヤノン株式会社 | 焦点検出装置、焦点検出方法及び撮像装置 |
| JP6004768B2 (ja) * | 2012-06-14 | 2016-10-12 | キヤノン株式会社 | 焦点検出のための信号処理装置、信号処理方法およびプログラム、ならびに焦点検出装置を有する撮像装置 |
| JP2014029353A (ja) * | 2012-07-31 | 2014-02-13 | Sony Corp | 焦点調整装置および焦点調整方法 |
| WO2014046037A1 (ja) * | 2012-09-19 | 2014-03-27 | 富士フイルム株式会社 | 撮像装置及びその制御方法 |
| JP5833254B2 (ja) * | 2012-11-14 | 2015-12-16 | 富士フイルム株式会社 | 画像処理装置、撮像装置、画像処理方法及び画像処理プログラム |
| JP2014106476A (ja) * | 2012-11-29 | 2014-06-09 | Canon Inc | 焦点検出装置、撮像装置、撮像システム、焦点検出方法、プログラム、および、記憶媒体 |
| JP5960286B2 (ja) * | 2012-12-19 | 2016-08-02 | 富士フイルム株式会社 | 画像処理装置、撮像装置、画像処理方法及び画像処理プログラム |
| JP5620522B2 (ja) * | 2013-01-07 | 2014-11-05 | オリンパスイメージング株式会社 | 撮像装置及び撮像方法 |
| EP2944997A4 (en) * | 2013-01-10 | 2016-12-21 | Olympus Corp | IMAGE CAPTURE DEVICE, IMAGE CORRECTION METHOD, IMAGE PROCESSING DEVICE, AND IMAGE PROCESSING METHOD |
| JP5951513B2 (ja) | 2013-01-21 | 2016-07-13 | 日立オートモティブシステムズ株式会社 | 多気筒内燃機関の可変動弁装置及び該可変動弁装置の制御装置 |
| JP6271842B2 (ja) * | 2013-02-18 | 2018-01-31 | キヤノン株式会社 | 測距装置、測距方法、および撮像装置 |
| JP6239862B2 (ja) * | 2013-05-20 | 2017-11-29 | キヤノン株式会社 | 焦点調節装置、焦点調節方法およびプログラム、並びに撮像装置 |
| JP6071761B2 (ja) * | 2013-05-31 | 2017-02-01 | キヤノン株式会社 | 撮像装置及びその制御方法 |
| CN109194849B (zh) * | 2013-06-13 | 2021-01-15 | 核心光电有限公司 | 双孔径变焦数字摄影机 |
| JP2015012127A (ja) * | 2013-06-28 | 2015-01-19 | ソニー株式会社 | 固体撮像素子および電子機器 |
| EP2833621B1 (en) * | 2013-08-01 | 2018-10-10 | Harvest Imaging bvba | Image sensor with shading detection |
| JP6300471B2 (ja) * | 2013-08-28 | 2018-03-28 | キヤノン株式会社 | 撮像装置の駆動方法、撮像システムの駆動方法 |
| JP5775918B2 (ja) * | 2013-09-27 | 2015-09-09 | オリンパス株式会社 | 撮像装置、画像処理方法及び画像処理プログラム |
| JP6021780B2 (ja) * | 2013-10-07 | 2016-11-09 | キヤノン株式会社 | 画像データ処理装置、距離算出装置、撮像装置および画像データ処理方法 |
| JP6351231B2 (ja) * | 2013-10-18 | 2018-07-04 | キヤノン株式会社 | 撮像装置、撮像システム、撮像装置の制御方法、プログラム、および、記憶媒体 |
| JP6188536B2 (ja) * | 2013-10-31 | 2017-08-30 | キヤノン株式会社 | 撮像装置、撮像システム、撮像装置の制御方法、プログラム、および、記憶媒体 |
| JP2015102735A (ja) | 2013-11-26 | 2015-06-04 | 株式会社ニコン | 焦点検出装置および撮像装置 |
| JP6223160B2 (ja) * | 2013-12-10 | 2017-11-01 | キヤノン株式会社 | 撮像装置、その制御方法、および制御プログラム |
| CN106415348B (zh) * | 2014-02-07 | 2018-12-14 | 富士胶片株式会社 | 摄像装置及对焦控制方法 |
| CN103945143B (zh) * | 2014-04-25 | 2018-04-06 | 西北核技术研究所 | 一种增加图像传感器动态范围的信号接收装置 |
| JP6313685B2 (ja) * | 2014-05-01 | 2018-04-18 | キヤノン株式会社 | 撮像装置およびその制御方法 |
| CN103985320A (zh) * | 2014-05-27 | 2014-08-13 | 利亚德光电股份有限公司 | 抑制摩尔纹的方法以及抑制摩尔纹的显示装置 |
| JP2015228466A (ja) | 2014-06-02 | 2015-12-17 | キヤノン株式会社 | 撮像装置及び撮像システム |
| JP6399817B2 (ja) * | 2014-06-13 | 2018-10-03 | キヤノン株式会社 | 撮像装置、撮像装置の制御方法、プログラム、および、記憶媒体 |
| JP6320195B2 (ja) * | 2014-06-24 | 2018-05-09 | キヤノン株式会社 | 撮像装置、制御装置、制御方法、プログラム、および、記憶媒体 |
| US9338380B2 (en) * | 2014-06-30 | 2016-05-10 | Semiconductor Components Industries, Llc | Image processing methods for image sensors with phase detection pixels |
| JP6415179B2 (ja) * | 2014-08-20 | 2018-10-31 | キヤノン株式会社 | 画像処理装置、画像処理方法、および撮像装置並びにその制御方法 |
| JP2016057391A (ja) * | 2014-09-08 | 2016-04-21 | ソニー株式会社 | 撮像素子 |
| JP6587380B2 (ja) * | 2014-09-12 | 2019-10-09 | キヤノン株式会社 | 画像処理装置、撮像装置、画像処理方法、プログラム、記憶媒体 |
| JP6483432B2 (ja) * | 2014-12-22 | 2019-03-13 | オリンパス株式会社 | 撮影装置 |
| JP6600458B2 (ja) * | 2014-12-25 | 2019-10-30 | オリンパス株式会社 | 撮像素子、焦点検出装置及び焦点検出方法 |
| JP6518071B2 (ja) * | 2015-01-26 | 2019-05-22 | キヤノン株式会社 | 固体撮像装置およびカメラ |
| US9998691B2 (en) * | 2015-03-11 | 2018-06-12 | Canon Kabushiki Kaisha | Pixel, a solid-state imaging device, and an imaging apparatus having barrier region between photoelectric conversion portions in parallel |
| JP6491539B2 (ja) * | 2015-05-22 | 2019-03-27 | キヤノン株式会社 | 撮像装置及びその制御方法、システムならびにプログラム |
| JP6594046B2 (ja) * | 2015-05-29 | 2019-10-23 | キヤノン株式会社 | 撮像装置及び焦点調節方法 |
| JP6812969B2 (ja) * | 2015-06-03 | 2021-01-13 | ソニー株式会社 | 固体撮像素子、撮像装置、及び、固体撮像素子の製造方法 |
| JP6412826B2 (ja) * | 2015-06-04 | 2018-10-24 | オリンパス株式会社 | 撮像装置 |
| FR3038110B1 (fr) * | 2015-06-29 | 2017-08-11 | Michelin & Cie | Procede de segmentation d'image |
| JP6017641B1 (ja) * | 2015-07-13 | 2016-11-02 | オリンパス株式会社 | 撮像装置,信号処理方法,信号処理プログラム |
| JP6595839B2 (ja) * | 2015-08-05 | 2019-10-23 | キヤノン株式会社 | 撮像素子およびその制御方法、ならびに撮像装置 |
| CN105120151B (zh) * | 2015-08-19 | 2017-12-05 | 浪潮集团有限公司 | 一种自动聚焦的方法及装置 |
| JP6758747B2 (ja) * | 2015-09-18 | 2020-09-23 | ソニーセミコンダクタソリューションズ株式会社 | 固体撮像装置および電子機器 |
| US9420164B1 (en) * | 2015-09-24 | 2016-08-16 | Qualcomm Incorporated | Phase detection autofocus noise reduction |
| JP6685769B2 (ja) * | 2016-02-26 | 2020-04-22 | キヤノン株式会社 | 情報処理装置、撮像装置及び情報処理方法 |
| CN111741200B (zh) * | 2016-04-08 | 2021-12-21 | 佳能株式会社 | 图像传感器和摄像设备 |
| JP6702777B2 (ja) * | 2016-04-12 | 2020-06-03 | キヤノン株式会社 | 撮像装置、撮像方法、及びプログラム |
| US10128284B2 (en) | 2016-06-23 | 2018-11-13 | Qualcomm Incorporated | Multi diode aperture simulation |
| CN107864315B (zh) | 2016-09-21 | 2020-08-11 | 佳能株式会社 | 摄像设备、摄像设备的控制方法和记录介质 |
| JP6860390B2 (ja) * | 2017-03-22 | 2021-04-14 | キヤノン株式会社 | 撮像素子及びその制御方法、撮像装置、焦点検出装置及び方法 |
| US10602051B2 (en) | 2017-03-28 | 2020-03-24 | Canon Kabushiki Kaisha | Imaging apparatus, control method, and non-transitory storage medium |
| JP6946045B2 (ja) * | 2017-04-28 | 2021-10-06 | キヤノン株式会社 | 焦点検出装置及び撮像システム |
| CN107146797B (zh) * | 2017-04-28 | 2020-03-27 | Oppo广东移动通信有限公司 | 双核对焦图像传感器及其对焦控制方法和成像装置 |
| KR102018984B1 (ko) * | 2018-05-15 | 2019-09-05 | 재단법인 다차원 스마트 아이티 융합시스템 연구단 | 베이스라인을 증가시키기 위한 카메라 시스템 |
| US11714259B2 (en) * | 2018-07-20 | 2023-08-01 | Nikon Corporation | Focus detection device, imaging device, and interchangeable lens |
| CN110823134B (zh) * | 2018-07-23 | 2021-07-23 | 北京大恒图像视觉有限公司 | 一种靶线计算及工业传感器安装检测方法 |
| US11195257B2 (en) * | 2018-08-24 | 2021-12-07 | Canon Kabushiki Kaisha | Image processing method, image processing apparatus, imaging apparatus, lens apparatus, storage medium, and image processing system |
| JP2019062536A (ja) * | 2018-10-30 | 2019-04-18 | 株式会社ニコン | 撮像装置 |
| JP7246961B2 (ja) * | 2019-02-15 | 2023-03-28 | キヤノン株式会社 | 撮像装置、撮像装置の制御方法、およびプログラム |
| WO2020188926A1 (ja) * | 2019-03-19 | 2020-09-24 | ソニー株式会社 | 画像処理装置と画像処理方法とプログラムおよび撮像装置 |
| US20220191401A1 (en) * | 2019-03-27 | 2022-06-16 | Sony Group Corporation | Image processing device, image processing method, program, and imaging device |
| CN110933305B (zh) | 2019-11-28 | 2021-07-20 | 维沃移动通信有限公司 | 电子设备及对焦方法 |
| JP7651834B2 (ja) | 2020-10-15 | 2025-03-27 | 株式会社ニコン | 撮像装置 |
| JP7180664B2 (ja) * | 2020-12-09 | 2022-11-30 | 株式会社ニコン | 撮像素子および撮像装置 |
| CN117643047A (zh) * | 2022-06-09 | 2024-03-01 | 北京小米移动软件有限公司 | 相机模组及图像处理方法、装置、终端、电子设备、介质 |
Family Cites Families (46)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60144712A (ja) * | 1984-01-06 | 1985-07-31 | Olympus Optical Co Ltd | 合焦検出装置 |
| JP3031606B2 (ja) | 1995-08-02 | 2000-04-10 | キヤノン株式会社 | 固体撮像装置と画像撮像装置 |
| US6819360B1 (en) * | 1999-04-01 | 2004-11-16 | Olympus Corporation | Image pickup element and apparatus for focusing |
| JP4007716B2 (ja) * | 1999-04-20 | 2007-11-14 | オリンパス株式会社 | 撮像装置 |
| US6750437B2 (en) * | 2000-08-28 | 2004-06-15 | Canon Kabushiki Kaisha | Image pickup apparatus that suitably adjusts a focus |
| JP2005106994A (ja) * | 2003-09-29 | 2005-04-21 | Canon Inc | 焦点検出装置、撮像装置、それらの制御方法 |
| JP2005197379A (ja) * | 2004-01-06 | 2005-07-21 | Sony Corp | 固体撮像装置および信号処理回路 |
| JP4967296B2 (ja) * | 2005-10-03 | 2012-07-04 | 株式会社ニコン | 撮像素子、焦点検出装置、および、撮像システム |
| JP2007158692A (ja) | 2005-12-05 | 2007-06-21 | Nikon Corp | 固体撮像素子及びこれを用いた電子カメラ |
| JP4720508B2 (ja) * | 2006-01-05 | 2011-07-13 | 株式会社ニコン | 撮像素子および撮像装置 |
| US7751700B2 (en) * | 2006-03-01 | 2010-07-06 | Nikon Corporation | Focus adjustment device, imaging device and focus adjustment method |
| JP4807131B2 (ja) * | 2006-04-05 | 2011-11-02 | 株式会社ニコン | 撮像素子および撮像装置 |
| US7711261B2 (en) * | 2006-04-11 | 2010-05-04 | Nikon Corporation | Imaging device, camera and image processing method |
| US8049801B2 (en) * | 2006-09-14 | 2011-11-01 | Nikon Corporation | Image sensor and imaging apparatus |
| JP4867552B2 (ja) * | 2006-09-28 | 2012-02-01 | 株式会社ニコン | 撮像装置 |
| JP4286276B2 (ja) | 2006-10-03 | 2009-06-24 | オリンパスイメージング株式会社 | 焦点検出装置 |
| JP4321579B2 (ja) * | 2006-11-28 | 2009-08-26 | ソニー株式会社 | 撮像装置 |
| JP5040458B2 (ja) * | 2007-06-16 | 2012-10-03 | 株式会社ニコン | 固体撮像素子及びこれを用いた撮像装置 |
| JP4935544B2 (ja) | 2007-07-06 | 2012-05-23 | 株式会社ニコン | 撮像装置 |
| US7989745B2 (en) * | 2007-10-01 | 2011-08-02 | Nikon Corporation | Solid-state imaging device with focus detection and electronic camera with focus adjustment |
| US7978255B2 (en) * | 2007-10-11 | 2011-07-12 | Nikon Corporation | Solid-state image sensor and image-capturing device |
| JP5157377B2 (ja) * | 2007-11-12 | 2013-03-06 | 株式会社ニコン | 焦点検出装置および撮像装置 |
| JP5180795B2 (ja) * | 2007-12-10 | 2013-04-10 | キヤノン株式会社 | 撮像装置及びその制御方法 |
| JP4978449B2 (ja) * | 2007-12-10 | 2012-07-18 | ソニー株式会社 | 撮像装置 |
| JP5169499B2 (ja) * | 2008-06-02 | 2013-03-27 | 株式会社ニコン | 撮像素子および撮像装置 |
| JP5317562B2 (ja) | 2008-07-17 | 2013-10-16 | キヤノン株式会社 | 位相差検出装置、撮像装置、位相差検出方法、位相差検出プログラム |
| JP5161702B2 (ja) * | 2008-08-25 | 2013-03-13 | キヤノン株式会社 | 撮像装置、撮像システム、及び焦点検出方法 |
| KR101342968B1 (ko) * | 2008-11-27 | 2013-12-19 | 캐논 가부시끼가이샤 | 고체촬상소자 및 촬상장치 |
| JP5230388B2 (ja) * | 2008-12-10 | 2013-07-10 | キヤノン株式会社 | 焦点検出装置及びその制御方法 |
| JP5476716B2 (ja) * | 2009-01-08 | 2014-04-23 | ソニー株式会社 | 撮像素子および撮像装置 |
| JP2010160313A (ja) * | 2009-01-08 | 2010-07-22 | Sony Corp | 撮像素子および撮像装置 |
| JP5455397B2 (ja) * | 2009-03-02 | 2014-03-26 | キヤノン株式会社 | 光学機器 |
| JP5424679B2 (ja) * | 2009-03-18 | 2014-02-26 | キヤノン株式会社 | 撮像装置及び信号処理装置 |
| JP5229060B2 (ja) | 2009-03-31 | 2013-07-03 | ソニー株式会社 | 撮像装置および焦点検出方法 |
| JP5359465B2 (ja) * | 2009-03-31 | 2013-12-04 | ソニー株式会社 | 固体撮像装置、固体撮像装置の信号処理方法および撮像装置 |
| JP5675157B2 (ja) | 2009-05-12 | 2015-02-25 | キヤノン株式会社 | 焦点検出装置 |
| JP2011221254A (ja) * | 2010-04-08 | 2011-11-04 | Sony Corp | 撮像装置、固体撮像素子、撮像方法およびプログラム |
| JP2012008424A (ja) * | 2010-06-28 | 2012-01-12 | Olympus Corp | 撮像システム |
| JP5513326B2 (ja) * | 2010-09-07 | 2014-06-04 | キヤノン株式会社 | 撮像素子及び撮像装置 |
| CN103238098B (zh) * | 2010-11-30 | 2015-04-15 | 富士胶片株式会社 | 成像设备和对焦位置检测方法 |
| JP5762002B2 (ja) * | 2011-01-06 | 2015-08-12 | キヤノン株式会社 | 撮像装置 |
| JP6016396B2 (ja) * | 2011-03-24 | 2016-10-26 | キヤノン株式会社 | 撮像素子および撮像装置 |
| JP5825817B2 (ja) * | 2011-04-01 | 2015-12-02 | キヤノン株式会社 | 固体撮像素子及び撮像装置 |
| JP5888914B2 (ja) * | 2011-09-22 | 2016-03-22 | キヤノン株式会社 | 撮像装置およびその制御方法 |
| JP5907595B2 (ja) * | 2011-09-27 | 2016-04-26 | キヤノン株式会社 | 撮像装置 |
| JP6066593B2 (ja) * | 2012-06-13 | 2017-01-25 | キヤノン株式会社 | 撮像システムおよび撮像システムの駆動方法 |
-
2012
- 2012-03-01 JP JP2012045788A patent/JP5956782B2/ja not_active Expired - Fee Related
- 2012-05-21 US US13/476,161 patent/US9001262B2/en active Active
- 2012-05-28 CN CN201210170098.6A patent/CN102801929B/zh active Active
-
2015
- 2015-02-24 US US14/629,953 patent/US9204067B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN102801929B (zh) | 2016-05-11 |
| CN102801929A (zh) | 2012-11-28 |
| US9001262B2 (en) | 2015-04-07 |
| JP2013007998A (ja) | 2013-01-10 |
| US9204067B2 (en) | 2015-12-01 |
| US20150172577A1 (en) | 2015-06-18 |
| US20120300104A1 (en) | 2012-11-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5956782B2 (ja) | 撮像素子及び撮像装置 | |
| JP5825817B2 (ja) | 固体撮像素子及び撮像装置 | |
| US8634015B2 (en) | Image capturing apparatus and method and program for controlling same | |
| JP5914055B2 (ja) | 撮像装置 | |
| US9438786B2 (en) | Focus adjustment apparatus, focus adjustment method and program, and imaging apparatus | |
| JP5159700B2 (ja) | 光学装置及び焦点検出方法 | |
| CN107465866B (zh) | 图像处理设备及方法、摄像设备和计算机可读存储介质 | |
| JP6584149B2 (ja) | 撮像装置 | |
| US12335599B2 (en) | Image processing device, image processing method, imaging device, and recording medium that display first and second subject regions in a captured image | |
| JP6918485B2 (ja) | 画像処理装置および画像処理方法、プログラム、記憶媒体 | |
| US10321044B2 (en) | Image pickup apparatus and image pickup system with point image intensity distribution calculation | |
| CN107960120B (zh) | 图像处理设备、摄像设备、图像处理方法和存储介质 | |
| JP6381266B2 (ja) | 撮像装置、制御装置、制御方法、プログラム、および、記憶媒体 | |
| JP6700986B2 (ja) | 画像処理装置、撮像装置、画像処理方法、及びプログラム | |
| JP2012252280A (ja) | 撮像装置 | |
| JP5852371B2 (ja) | 撮像装置及びその制御方法 | |
| JP2020003686A (ja) | 焦点検出装置、撮像装置および交換レンズ装置 | |
| JP2020057017A (ja) | 撮像装置及びその制御方法 | |
| JP6257201B2 (ja) | 焦点検出装置、その制御方法、および制御プログラム、並びに撮像装置 | |
| JP2018116267A (ja) | 焦点検出装置および方法、および撮像装置 | |
| JP2017097142A (ja) | 制御装置、撮像装置、制御方法、プログラム、および、記憶媒体 | |
| JP2017219557A (ja) | 撮像装置およびその制御方法、プログラム、記憶媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150302 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150302 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151124 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151130 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160126 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160520 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160617 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5956782 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |