JP5849166B1 - 基板間接続構造 - Google Patents
基板間接続構造 Download PDFInfo
- Publication number
- JP5849166B1 JP5849166B1 JP2015075394A JP2015075394A JP5849166B1 JP 5849166 B1 JP5849166 B1 JP 5849166B1 JP 2015075394 A JP2015075394 A JP 2015075394A JP 2015075394 A JP2015075394 A JP 2015075394A JP 5849166 B1 JP5849166 B1 JP 5849166B1
- Authority
- JP
- Japan
- Prior art keywords
- fitting
- contact
- substrate
- connector
- housing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000000758 substrate Substances 0.000 claims abstract description 203
- 238000006073 displacement reaction Methods 0.000 claims description 25
- 230000013011 mating Effects 0.000 claims description 4
- 238000003780 insertion Methods 0.000 abstract description 52
- 230000037431 insertion Effects 0.000 abstract description 52
- 238000000605 extraction Methods 0.000 abstract description 33
- 238000005299 abrasion Methods 0.000 abstract 1
- 238000004519 manufacturing process Methods 0.000 abstract 1
- 238000005452 bending Methods 0.000 description 21
- 125000006850 spacer group Chemical group 0.000 description 15
- 210000001364 upper extremity Anatomy 0.000 description 15
- 230000001965 increasing effect Effects 0.000 description 14
- 230000005489 elastic deformation Effects 0.000 description 9
- 238000000034 method Methods 0.000 description 8
- 239000002184 metal Substances 0.000 description 6
- 239000011347 resin Substances 0.000 description 6
- 229920005989 resin Polymers 0.000 description 6
- 230000000694 effects Effects 0.000 description 4
- 238000013459 approach Methods 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000007747 plating Methods 0.000 description 3
- 230000004308 accommodation Effects 0.000 description 2
- 238000007796 conventional method Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 238000005476 soldering Methods 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 230000002708 enhancing effect Effects 0.000 description 1
- 238000004080 punching Methods 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
Images

























Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R13/00—Details of coupling devices of the kinds covered by groups H01R12/70 or H01R24/00 - H01R33/00
- H01R13/62—Means for facilitating engagement or disengagement of coupling parts or for holding them in engagement
- H01R13/629—Additional means for facilitating engagement or disengagement of coupling parts, e.g. aligning or guiding means, levers, gas pressure electrical locking indicators, manufacturing tolerances
- H01R13/631—Additional means for facilitating engagement or disengagement of coupling parts, e.g. aligning or guiding means, levers, gas pressure electrical locking indicators, manufacturing tolerances for engagement only
- H01R13/6315—Additional means for facilitating engagement or disengagement of coupling parts, e.g. aligning or guiding means, levers, gas pressure electrical locking indicators, manufacturing tolerances for engagement only allowing relative movement between coupling parts, e.g. floating connection
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R12/00—Structural associations of a plurality of mutually-insulated electrical connecting elements, specially adapted for printed circuits, e.g. printed circuit boards [PCB], flat or ribbon cables, or like generally planar structures, e.g. terminal strips, terminal blocks; Coupling devices specially adapted for printed circuits, flat or ribbon cables, or like generally planar structures; Terminals specially adapted for contact with, or insertion into, printed circuits, flat or ribbon cables, or like generally planar structures
- H01R12/70—Coupling devices
- H01R12/71—Coupling devices for rigid printing circuits or like structures
- H01R12/712—Coupling devices for rigid printing circuits or like structures co-operating with the surface of the printed circuit or with a coupling device exclusively provided on the surface of the printed circuit
- H01R12/716—Coupling device provided on the PCB
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R13/00—Details of coupling devices of the kinds covered by groups H01R12/70 or H01R24/00 - H01R33/00
- H01R13/02—Contact members
- H01R13/22—Contacts for co-operating by abutting
- H01R13/24—Contacts for co-operating by abutting resilient; resiliently-mounted
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R12/00—Structural associations of a plurality of mutually-insulated electrical connecting elements, specially adapted for printed circuits, e.g. printed circuit boards [PCB], flat or ribbon cables, or like generally planar structures, e.g. terminal strips, terminal blocks; Coupling devices specially adapted for printed circuits, flat or ribbon cables, or like generally planar structures; Terminals specially adapted for contact with, or insertion into, printed circuits, flat or ribbon cables, or like generally planar structures
- H01R12/50—Fixed connections
- H01R12/51—Fixed connections for rigid printed circuits or like structures
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R12/00—Structural associations of a plurality of mutually-insulated electrical connecting elements, specially adapted for printed circuits, e.g. printed circuit boards [PCB], flat or ribbon cables, or like generally planar structures, e.g. terminal strips, terminal blocks; Coupling devices specially adapted for printed circuits, flat or ribbon cables, or like generally planar structures; Terminals specially adapted for contact with, or insertion into, printed circuits, flat or ribbon cables, or like generally planar structures
- H01R12/70—Coupling devices
- H01R12/91—Coupling devices allowing relative movement between coupling parts, e.g. floating or self aligning
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R13/00—Details of coupling devices of the kinds covered by groups H01R12/70 or H01R24/00 - H01R33/00
- H01R13/02—Contact members
- H01R13/15—Pins, blades or sockets having separate spring member for producing or increasing contact pressure
- H01R13/187—Pins, blades or sockets having separate spring member for producing or increasing contact pressure with spring member in the socket
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R13/00—Details of coupling devices of the kinds covered by groups H01R12/70 or H01R24/00 - H01R33/00
- H01R13/46—Bases; Cases
- H01R13/502—Bases; Cases composed of different pieces
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R13/00—Details of coupling devices of the kinds covered by groups H01R12/70 or H01R24/00 - H01R33/00
- H01R13/46—Bases; Cases
- H01R13/533—Bases, cases made for use in extreme conditions, e.g. high temperature, radiation, vibration, corrosive environment, pressure
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R13/00—Details of coupling devices of the kinds covered by groups H01R12/70 or H01R24/00 - H01R33/00
- H01R13/02—Contact members
- H01R13/26—Pin or blade contacts for sliding co-operation on one side only
Abstract
Description
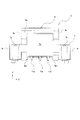
第1実施形態の電気コネクタ1は、図16で示すように、第1の基板2に実装される「第1のコネクタ」としてのプラグコネクタ3と、第2の基板4に実装される「第2のコネクタ」又は「接続対象物」としてのソケットコネクタ5とを備える。そして、プラグコネクタ3とソケットコネクタ5とが互いに嵌合することで、第1の基板2と第2の基板4とが導通接続する。
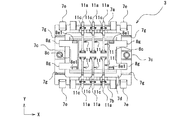
本実施形態のプラグコネクタ3は、図1〜図5で示すようにプラグハウジング6と、「第1の端子」としてのプラグ端子11とを備える。またプラグコネクタ3は表面実装タイプのコネクタであり、第1の基板2の基板面に表面実装されることで、第1の基板2と導通接触する。
プラグハウジング6は、絶縁性樹脂の成型品でなり、「基板側ハウジング」としての固定ハウジング7と、「嵌合側ハウジング」としての可動ハウジング8とを備えるフローティングコネクタである。
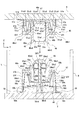
プラグ端子11は、導電性金属板を板厚方向に折り曲げて形成される。また、プラグ端子11は、図11,図12で示すように、基板接続部11aと、固定部11bと、「可動片」としての可動部11cと、可動ハウジング8に固定される基端部11dと、「第1の接触部」としてのプラグ接触部11eとを有する。プラグ端子11は、嵌合壁部8fを介して対向する端子対を形成する。
ソケットコネクタ5は、ソケットハウジング9と、「第2の端子」としてのソケット端子10とを備える。また、ソケットコネクタ5は、DIP(Dual In−line Package)タイプのコネクタであり、第2の基板4に設けられるスルーホール4aにソケット端子10のピン状の基板接続部10aが挿入されて半田付けされることでソケット端子10が第2の基板4に対して固定される。
ソケットハウジング9は、絶縁性樹脂の成型品でなり、図6〜図10で示すように天面部9dに開口する中空の箱型形状でなる。また、ソケットハウジング9は、前面部9a、背面部9b、側面部9c,9cとを有し、この両側面部9c,9cの上部(図6〜図10における下部)には第2の基板4に半田付けされる取付具9fが設けられる。
ソケット端子10は、導電性金属板を打ち抜いて形成した打抜き端子である。また、ソケット端子10は、図13,図14で示すように、基板接続部10aと、基端部10bと、「第2の接触部」としてのソケット接触部10cとを有する。ソケット端子10は、嵌合室9eを介して対向する端子対を形成する。
以上のように構成されたソケットコネクタ5とプラグコネクタ3からなる電気コネクタ1は、第1の基板2と第2の基板4を電気的に接続することができる。図15〜図19で示すように、第1の基板2に接続されたプラグコネクタ3の上方から第2の基板4に接続されたソケットコネクタ5を嵌合させる場合は、ソケットコネクタ5を下方に移動させて、プラグコネクタ3の嵌合部3Aをソケットコネクタ5の受入口9d1に挿入する。
上記の通り、フロント接点部13aとリア接点部12aとが幅方向Xにおける同一位置に配列されている。よって、ソケット端子10とプラグ端子11とが摺動する際に、リア接点部12aは、先端傾斜部13cとフロント接点部13aが接触したプラグ端子11の接触面11e1上の軌跡を通って接触する。これにより、プラグ端子11にゴミや埃等の異物が付いていても、フロント接点部13aがこの異物を除去するか保持するため、フロント端子13が移動した軌跡からは異物が除去されている。従って、異物が除去された軌跡を通るリア接点部12aは、プラグ端子11に対する確実な導通接触を行うことができる。そして最後に図21で示すように、フロント接点部13aとリア接点部12aがともにプラグ端子11の接触面11e1と接触した状態となる。このようにプラグコネクタ3とソケットコネクタ5の嵌合状態において、プラグ端子11とソケット端子10の相互間の導通接触の信頼性を高めることができる。
可動ハウジング8の固定ハウジング7に対する前後方向Y及び幅方向Xの可動について説明する。まず、可動部11cの第1の伸長部11c1と固定ハウジング7の前面部7a又は背面部7bとの間には可動間隙7fが設けられている。よって、例えば第1の伸長部11c1が可動間隙7fの内部で前面部7aや背面部7bに近づいたり離れたりする方向に前後方向Yに沿って変位することができる。また、例えば第2の伸長部11c3が、前面部7aや背面部7bに近づいたり離れたりする方向で前後方向Yに沿って弾性変形することもできる。これらによって電気コネクタ1に前後方向Yの振動が加えられると、可動部11cが前後方向Yで弾性変形することで可動ハウジング8が固定ハウジング7に対して前後方向Yで弾性変位して、その振動を吸収することができる。
続いて、可動ハウジング8の固定ハウジング7に対する高さ方向Zの可動について説明する。従来のコネクタでは、高さ方向Zの振動に対して、プラグ端子とソケット端子とが振動に合わせて互いに高さ方向Zに摺動することで、導通接触を維持する。しかし、この方法では、プラグ端子とソケット端子との導通接触部分で摩耗が生じ、接続信頼性が低下するおそれがある。これに対して本実施形態の電気コネクタ1では、プラグ端子11が有する可動部11cによって高さ方向Zの振動を吸収することができる。よって、プラグ端子11とソケット端子10の摩耗を抑制したり、導電性を高めるためのメッキはがれ等を生じ難くしたりすることができる。これにより、電気コネクタ1の接続信頼性を高めることができる。
可動ハウジング8は固定ハウジング7に対して相対変位することができるが、幅方向X及び前後方向Yの相対変位は可動空間部7dの内部に制限される。また、可動ハウジング8の側面部8cの下端には幅方向Xに沿って突出する係止部8gが設けられる。固定ハウジング7には、その係止部8gが挿入される凹部7gが設けられる。可動ハウジング8が固定ハウジング7に対して高さ方向Zにおける上側に向けて変位しても、係止部8gが凹部7gの内縁7g1に係止することで固定ハウジング7に対する可動ハウジング8の変位が規制される。こうして可動ハウジング8の固定ハウジング7に対する幅方向X、前後方向Y、高さ方向Zの相対変位を制限することができる。また、プラグ端子11は固定ハウジング7と可動ハウジング8に対して固定されているため、同様に可動部11cの弾性変形も規制される。さらに、可動部11cをプラグハウジング6の内部に収容しているため、プラグハウジング6の壁体によっても可動部11cの弾性変形が記載される。
ソケット端子10のフロントバネ部13bとリアバネ部12bについて、板厚、板幅、プラグコネクタ3の嵌合方向に対する傾斜角度等を調整することで、フロント端子13とリア端子12との正規の接触位置P2からの挿抜方向における相対的な位置ずれを生じさせるために必要な荷重を調整することができる。即ち、フロントバネ部13bとリアバネ部12bの板厚を厚くすることや、板幅をより広くすることや、プラグコネクタ3の挿抜方向に対する傾斜角度をより大きくすることで、フロントバネ部13bとリアバネ部12bをプラグ端子11に対してより強い力で接触させると共に、プラグ端子11から離れる方向に変形し難くすることができる。これにより前記荷重を大きくすることができる。また、逆にそれらの板厚を薄くすることや、板幅をより狭くすることや、プラグコネクタ3の嵌合方向に対する傾斜角度をより小さくすることで、フロントバネ部13bとリアバネ部12bをプラグ端子11に対してより弱い力で接触させると共に、プラグ端子11から離れる方向に変形しやすくすることができる。これにより前記荷重を小さくすることができる。
プラグ端子11の可動部11cについては、板幅を調整することによって可動部11cを弾性変形させるために必要な荷重を調整することができる。具体的には、可動部11cの板幅を細くすることによって、より小さな荷重で弾性変形する可動部11cとすることができる。また反対に、可動部11cの板幅を広くすることによって、弾性変形させるためにより大きな荷重を必要とする可動部11cとすることができる。特に本実施形態では、可動部11cの第1の屈曲部11c2、第3の屈曲部11c6の板幅が、各伸長部11c1,11c3,11c5の板幅よりも広く設定されている。これに対して第3の屈曲部11c4の板幅は、各伸長部11c1,11c3,11c5と同程度の広さとなっており、他の屈曲部11c2,11c6よりも細く設定されている。従って、第2の屈曲部11c3は、他の屈曲部11c2,11c6よりも弾性変形しやすく、柔らかくなっている。よって、高さ方向Zの振動が加えられる際には、この第2の屈曲部11c3が最も弾性変形しやすくなっている。このように、可動部11cの部分ごとに板幅を変えることで、弾性変形させるための荷重を調整することができる。
基板2,4の共振等により、電気コネクタ1に特に大きな振動が加えられることがある。この場合には、従来のようにプラグ端子11とソケット端子10とを摺動させることでその振動に対応しようとすると、各端子に生じる摩耗や損傷が大きくなってしまう。また、共振による基板2,4の振動の大きさと比較して、接触部10c,11e同士が互いに摺動移動可能な距離が短いために、大きな振動に対応できずにプラグ端子11とソケット端子10とが離間する場合もある。しかし、本実施形態の電気コネクタ1のように可動部11cが十分に挿抜方向で弾性変形するものとすることで、高さ方向Zの振動を吸収するものとすることができる。こうして、プラグ端子11,ソケット端子10の接触部分に摩耗が生じ難くし、かつ十分に共振による振動も吸収することができる。
第1実施形態では、可動部11cをプラグ端子11が有する電気コネクタ1を示した。これに対し、本実施形態の電気コネクタ21は、第1の基板2に固定される「第1のコネクタ」としてのソケットコネクタ25と、第2の基板4に固定される「第2のコネクタ」としてのプラグコネクタ23とを備える。ソケットコネクタ25は「基板側ハウジング」としての固定ハウジング27と「嵌合側ハウジング」としての可動ハウジング28とを備えるソケットハウジング29と、「可動片」としての可動部30cを有する「第1の端子」としてのソケット端子30とを備える。
プラグコネクタ23は、DIPタイプのコネクタであり、第2の基板4に対して固定される。また、プラグコネクタ23は、プラグハウジング26と、「第2の端子」プラグ端子31とを備える。
プラグハウジング26は、絶縁性樹脂の成型品でなり、下側に向けて開口する箱状でなる。また、プラグハウジング26は、前面部26aと、背面部26bと、前面部26aと背面部26bと、底面部26cによって囲まれる嵌合室26dとを有する。
プラグ端子31は、ピン状の端子であり、第2の基板4に設けられるスルーホール4aに挿入される基板接続部31aと、ソケット端子30と押圧接触する「第1の接触部」としての接点部31bとを有する。
ソケットコネクタ25は、表面実装タイプのコネクタであり、第1の基板2の基板面に半田付けされて固定される。ソケットコネクタ25は、ソケットハウジング29と、ソケット端子30とを備える。
ソケットハウジング29は、絶縁性樹脂の成型品でなり、固定ハウジング27と、可動ハウジング28とを備える。
ソケット端子30は、導電性金属板を板厚方向に折り曲げて形成され、ソケットハウジング29において嵌合壁部28fを介して前後方向Yに沿って対を成して設けられる。ソケット端子30は、第1実施形態のプラグ端子11と同様の構成でなる基板接続部30aと、固定部30bと、可動部30cと、基端部30dとを有する。可動部30cは、第1の伸長部30c1と、第1の屈曲部30c2と、第2の伸長部30c3と、第2の屈曲部30c4と、第3の伸長部30c5と、第3の屈曲部30c6とを有する。
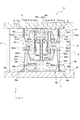
図24で示すように、初期嵌合状態において、プラグ端子31とソケット端子30とが初期接触位置P1で導通接触している状態で、プラグハウジング26の底面部46cと、ソケットハウジング29の嵌合壁部28fの先端部28f1との間には、嵌合間隙S5が設けられている。また、この状態で、プラグハウジング26の前面部26aの下端部26a1と、ソケットハウジング29の前面部27aの上端部27a2との間、及びプラグハウジング26の背面部26bの下端部26b1と、ソケットハウジング29の背面部27bの上端部27b2との間にはそれぞれ嵌合間隙S6が設けられている。これらの嵌合間隙S5,S6は、高さ方向Zで第2の基板4の最大の撓み可能な長さよりも長く設けられている。こうすることで、基板2,4に共振等が生じても、プラグコネクタ23とソケットコネクタ25とが互いに嵌合間隙S5,S6を狭める方向に十分に相対変位し、深い位置で嵌合することができる(「嵌合状態」)。また、これらの嵌合間隙S5,S6は、ソケットハウジング29の幅方向Xにおける略全長にわたって設けられる。
前記各実施形態では、可動部をプラグ端子又はソケット端子のいずれか一方のみが有する電気コネクタ1,21を示した。これに対して、プラグ端子51とソケット端子50の双方がそれぞれ可動部51c,50cを有する電気コネクタ41とすることができる。これにより、大きな振動をプラグ端子51の可動部51cとソケット端子50の可動部51cとによって十分に吸収することができる。また、電気コネクタ41が可動部50c,51cを有することで、振動を吸収するために必要な可動量をそれらの可動部50c,51cに分散させることができる。そのため、いずれか一方のみが可動部を有する場合と比較して、一つの可動部に掛かる負荷を低くすることができるため、可動部の塑性変形や損傷などの発生を抑えることができる。
「第1のコネクタ」としてのソケットコネクタ45は、表面実装タイプのコネクタであり、第1の基板2の基板面に半田付けされて固定される。ソケットコネクタ45は、ソケットハウジング49と、ソケット端子50とを備える。
ソケットハウジング49は、絶縁性樹脂の成型品でなり、「基板側ハウジング」としての固定ハウジング57と、「嵌合側ハウジング」としての可動ハウジング58とを備える。固定ハウジング57と可動ハウジング58との間には、「第2のコネクタ」又は「接続対象物」としてのプラグハウジング46の前面部48aと背面部48bが挿入されて、ソケット端子50とプラグ端子51が導通接触する嵌合室49eが設けられる
「第1の端子」としてのソケット端子50は、導電性金属板を板厚方向に折り曲げて形成され、ソケット端子50は、第2実施形態のソケット端子30と同様の構成でなる基板接続部50aと、固定部50bと、可動部50cと、基端部50dとを有する。可動部50cは、第1の伸長部50c1と、第1の屈曲部50c2と、第2の伸長部50c3と、第2の屈曲部50c4と、第3の伸長部50c5と、第3の屈曲部50c6とを有する。
「第2のコネクタ」としてのプラグコネクタ43は、表面実装タイプのコネクタであり、第1の基板2の基板面に半田付けされて固定される。プラグコネクタ43は、プラグハウジング46と、プラグ端子51とを備える。
プラグハウジング46は、絶縁性樹脂の成型品でなり、固定ハウジング47と、可動ハウジング48とを備える。
「第2の端子」プラグ端子51は、導電性金属板を板厚方向に折り曲げて形成され、プラグ端子51は、第1実施形態のプラグ端子11と同様の構成でなる基板接続部51aと、固定部51bと、可動部51cと、基端部51dと、プラグ接触部51eを有する。可動部51cは、第1の伸長部51c1と、第1の屈曲部51c2と、第2の伸長部51c3と、第2の屈曲部51c4と、第3の伸長部51c5と、第3の屈曲部51c6とを有する。
「初期嵌合状態」において、プラグ端子51とソケット端子50とが初期接触位置P1で導通接触している状態で、プラグハウジング46の底面部48eと、ソケットハウジング49の嵌合壁部58fの先端部58f1との間には、嵌合間隙S7が設けられている(図27)。また、この状態で、プラグハウジング46の前面部48aの笠状部48a1と、ソケットハウジング49の可動ハウジング58の下端部58aとの間、及びプラグハウジング46の背面部48bの笠状部48b1と、ソケットハウジング49の可動ハウジング58の下端部58bとの間にはそれぞれ嵌合間隙S8が設けられている(図27)。さらに、プラグハウジング46の前面部48aの下端部48a2と、ソケットハウジング49の嵌合室49eの底部49e1との間、及びプラグハウジング46の背面部48bの上端部48b2と、ソケットハウジング49の嵌合室49eの底部49e1との間には、嵌合間隙S9が設けられている。
上記実施形態は本発明の実施形態に過ぎず上記実施形態のみに限定されるものではなく、本発明の趣旨を逸脱しない範囲での適宜の変更が可能である。
2 第1の基板
3,23,43 プラグコネクタ
3A 嵌合部
4 第2の基板
4a スルーホール
5,25,45 ソケットコネクタ
6 プラグハウジング(第1実施形態)
7,47 固定ハウジング
7a,47a 前面部
7a1,47a1 端子収容孔
7b,47b 背面部
7b1,47b1 端子収容孔
7c 側面部
7d 可動空間部
7e 取付具
7f,47f 可動間隙
7g 凹部
7g1 内縁
8,48 可動ハウジング
8a,48a 前面部
48a1 笠状部
48a2 下端部
8b,48b 背面部
48b1 笠状部
48a2 下端部
8c 側面部
8d,48d 嵌合室
8d1 底部
8e,48e 底面部
8e1 当接部
8f 嵌合壁部
8f1 先端部
8f2 端子溝
8g 係止部
9,29,49 ソケットハウジング
9a 前面部
9a1 端子収容孔
9b 背面部
9c 側面部
9d 天面部
9d1 受入口
9e,49e 嵌合室
9e1,49e1 底部
9f 取付具
9g 内壁
9g1 端子収容孔
10 ソケット端子
10a 基板接続部
10b 基端部
10b1 圧入突起
10c ソケット接触部
10d 空間部
11,51 プラグ端子
11a,51a 基板接続部
11b,51b 固定部
11b1 圧入突起
11c,51c 可動部
11c1,51c1 第1の伸長部
11c2,51c2 第1の屈曲部
11c3,51c3 第2の伸長部
11c4,51c4 第2の屈曲部
11c5,51c5 第3の伸長部
11c6,51c6 第3の屈曲部
11d,51d 基端部
11d1 圧入突起
11e,51e プラグ接触部
11e1 接触面
12 リア端子
12a リア接点部
12b リアバネ部
12c 先端傾斜部
13 フロント端子
13a フロント接点部
13b フロントバネ部
13b1 フロント脚部
13c 先端傾斜部
21 電気コネクタ(第2実施形態)
26 プラグハウジング(第2実施形態)
26a 前面部
26a1 下端部
26b 背面部
26b1 下端部
26c 底面部
26d 嵌合室
27,57 固定ハウジング
27a,57a 前面部
27a1,57a1 端子収容孔
27a2 上端部
27b,57b 背面部
27b1,57b1 端子収容孔
27b2 上端部
27f,57f 可動間隙
28,58 可動ハウジング
28a 前面部
28b 背面部
28f,58f 嵌合壁部
28f1,58f1 先端部
58f2 当接部
58a,58b 下端部
29d1 開口部
29e 嵌合室
29f 底面部
29f1 当接部
30,50 ソケット端子
30a,50a 基板接続部
30b,50b 固定部
30c,50c 可動部
30c1,50c1 第1の伸長部
30c2,50c2 第1の屈曲部
30c3,50c3 第2の伸長部
30c4,50c4 第2の屈曲部
30c5,50c5 第3の伸長部
30c6,50c6 第3の屈曲部
30d,50d 基端部
30e,50e ソケット接触部
30e1 連結部
30e2 弾性片部
30e3 接点部
50e1 接点部
50e2 縦片部
50e3 横片部
50e4 屈曲部
31 プラグ端子(第2実施形態)
31a 基板接続部
31b 接点部
41 電気コネクタ(第3実施形態)
46 プラグハウジング(第3実施形態)
51e プラグ接触部
51e1 接触面
100 第1の折曲部
101 第2の折曲部
R,R2 スペーサ
S 基板間接続構造
Claims (6)
- 第1の基板と第2の基板とが一定の距離を維持した状態で対向配置されており、第1の基板に固定するコネクタと第2の基板に固定する接続対象物とを導通接続する基板間接続構造において、
前記コネクタが、
前記接続対象物と嵌合する嵌合側ハウジングと、第1の基板に固定する基板側ハウジングと、
嵌合側ハウジングと嵌合した前記接続対象物と導通接触する第1の接触部と、嵌合側ハウジングと基板側ハウジングとを弾性的に繋ぐ可動片とを有する第1の端子とを備えており、
前記嵌合側ハウジングが前記第1の基板に対する当接部を有し、
前記嵌合側ハウジングと接続対象物の何れか一方に、第1の基板と第2の基板の少なくとも何れか一方が、基板間距離が短くなる方向に撓んで嵌合側ハウジングの前記当接部が第1の基板によって押し込まれることで前記何れか他方との嵌合位置が深くなる嵌合間隙を有しており、
前記第1の基板と前記第2の基板の少なくとも何れか一方が嵌合側ハウジングと前記接続対象物との嵌合方向及び抜去方向で撓むと、第1の接触部が前記接続対象物に対する接触状態を維持したまま、可動片が第1の基板と連動する基板側ハウジングの変位を弾性支持することを特徴とする基板間接続構造。 - 第1の基板と嵌合側ハウジングとの間に可動間隙を有する
請求項1記載の基板間接続構造。 - 第1の基板と第2の基板とが一定の距離を維持した状態で対向配置されており、第1の基板に固定するコネクタと第2の基板に固定する接続対象物とを導通接続する基板間接続構造において、
前記コネクタが、
前記接続対象物と嵌合する嵌合側ハウジングと、第1の基板に固定する基板側ハウジングと、
嵌合側ハウジングと嵌合した前記接続対象物と導通接触する第1の接触部と、嵌合側ハウジングと基板側ハウジングとを弾性的に繋ぐ可動片とを有する第1の端子とを備えており、
嵌合側ハウジングが基板側ハウジングに対する当接部を有し、
嵌合側ハウジングと接続対象物の何れか一方に、第1の基板と第2の基板の少なくとも何れか一方が、基板間距離が短くなる方向に撓んで嵌合側ハウジングの当接部が基板側ハウジングによって押し込まれることで前記何れか他方との嵌合位置が深くなる嵌合間隙を有しており、
前記第1の基板と前記第2の基板の少なくとも何れか一方が嵌合側ハウジングと前記接続対象物との嵌合方向及び抜去方向で撓むと、第1の接触部が前記接続対象物に対する接触状態を維持したまま、可動片が第1の基板と連動する基板側ハウジングの変位を弾性支持することを特徴とする基板間接続構造。 - 基板側ハウジングと嵌合側ハウジングとの間に可動間隙を有する
請求項1〜請求項3何れか1項記載の基板間接続構造。 - 可動片は、第1の基板と第2の基板の少なくとも何れか一方が基板間距離が拡大する方向に撓んだときに、基板側ハウジングの変位を弾性支持する
請求項1〜請求項4何れか1項記載の基板間接続構造。 - 可動片は、第1の基板と第2の基板の少なくとも何れか一方が基板間距離が短くなる方向に撓んだときに、基板側ハウジングの変位を弾性支持する
請求項1〜請求項5何れか1項記載の基板間接続構造。
Priority Applications (14)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015075394A JP5849166B1 (ja) | 2014-12-12 | 2015-04-01 | 基板間接続構造 |
| JP2015161066A JP6595252B2 (ja) | 2014-12-12 | 2015-08-18 | コネクタと接続対象物との接続構造 |
| JP2015161068A JP6219892B2 (ja) | 2014-12-12 | 2015-08-18 | 電気コネクタ |
| EP16162863.1A EP3076490B1 (en) | 2015-04-01 | 2016-03-30 | Substrate interconnection structure |
| US15/086,259 US9698508B2 (en) | 2015-04-01 | 2016-03-31 | Connector and substrate interconnection structure |
| CN201610200829.5A CN106058569B (zh) | 2015-04-01 | 2016-03-31 | 连接器以及基板间连接构造 |
| CN201610201889.9A CN106058538B (zh) | 2015-04-01 | 2016-03-31 | 电连接器 |
| US15/086,344 US20160294089A1 (en) | 2015-04-01 | 2016-03-31 | Electric Connector |
| EP16163177.5A EP3076491A1 (en) | 2015-04-01 | 2016-03-31 | Electric connector |
| JP2019065028A JP6704075B2 (ja) | 2014-12-12 | 2019-03-28 | 電気コネクタ及びコネクタと接続対象物との接続構造 |
| JP2019173811A JP6928047B2 (ja) | 2014-12-12 | 2019-09-25 | 電気コネクタ及びコネクタと接続対象物との接続構造 |
| JP2019173810A JP6944980B2 (ja) | 2014-12-12 | 2019-09-25 | 電気コネクタ |
| JP2021148940A JP7295184B2 (ja) | 2014-12-12 | 2021-09-13 | 電気コネクタ |
| JP2023063507A JP2023083371A (ja) | 2014-12-12 | 2023-04-10 | 電気コネクタ |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014252399 | 2014-12-12 | ||
| JP2014252399 | 2014-12-12 | ||
| JP2015075394A JP5849166B1 (ja) | 2014-12-12 | 2015-04-01 | 基板間接続構造 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP5849166B1 true JP5849166B1 (ja) | 2016-01-27 |
Family
ID=55642284
Family Applications (8)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015075394A Active JP5849166B1 (ja) | 2014-12-12 | 2015-04-01 | 基板間接続構造 |
| JP2015161068A Active JP6219892B2 (ja) | 2014-12-12 | 2015-08-18 | 電気コネクタ |
| JP2015161066A Active JP6595252B2 (ja) | 2014-12-12 | 2015-08-18 | コネクタと接続対象物との接続構造 |
| JP2019065028A Active JP6704075B2 (ja) | 2014-12-12 | 2019-03-28 | 電気コネクタ及びコネクタと接続対象物との接続構造 |
| JP2019173811A Active JP6928047B2 (ja) | 2014-12-12 | 2019-09-25 | 電気コネクタ及びコネクタと接続対象物との接続構造 |
| JP2019173810A Active JP6944980B2 (ja) | 2014-12-12 | 2019-09-25 | 電気コネクタ |
| JP2021148940A Active JP7295184B2 (ja) | 2014-12-12 | 2021-09-13 | 電気コネクタ |
| JP2023063507A Pending JP2023083371A (ja) | 2014-12-12 | 2023-04-10 | 電気コネクタ |
Family Applications After (7)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015161068A Active JP6219892B2 (ja) | 2014-12-12 | 2015-08-18 | 電気コネクタ |
| JP2015161066A Active JP6595252B2 (ja) | 2014-12-12 | 2015-08-18 | コネクタと接続対象物との接続構造 |
| JP2019065028A Active JP6704075B2 (ja) | 2014-12-12 | 2019-03-28 | 電気コネクタ及びコネクタと接続対象物との接続構造 |
| JP2019173811A Active JP6928047B2 (ja) | 2014-12-12 | 2019-09-25 | 電気コネクタ及びコネクタと接続対象物との接続構造 |
| JP2019173810A Active JP6944980B2 (ja) | 2014-12-12 | 2019-09-25 | 電気コネクタ |
| JP2021148940A Active JP7295184B2 (ja) | 2014-12-12 | 2021-09-13 | 電気コネクタ |
| JP2023063507A Pending JP2023083371A (ja) | 2014-12-12 | 2023-04-10 | 電気コネクタ |
Country Status (4)
| Country | Link |
|---|---|
| US (2) | US20160294089A1 (ja) |
| EP (2) | EP3076490B1 (ja) |
| JP (8) | JP5849166B1 (ja) |
| CN (2) | CN106058538B (ja) |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017135020A (ja) * | 2016-01-28 | 2017-08-03 | イリソ電子工業株式会社 | コネクタ |
| JP2017182891A (ja) * | 2016-03-28 | 2017-10-05 | イリソ電子工業株式会社 | 中継コネクタ |
| EP3249752A1 (en) * | 2016-05-23 | 2017-11-29 | Hirose Electric Co., Ltd. | Connecting structure |
| JP2018006039A (ja) * | 2016-06-28 | 2018-01-11 | イリソ電子工業株式会社 | コネクタ |
| CN107706569A (zh) * | 2016-08-09 | 2018-02-16 | 广濑电机株式会社 | 电路基板用电连接器 |
| CN107799932A (zh) * | 2016-08-29 | 2018-03-13 | 广濑电机株式会社 | 电路基板用电连接器 |
| JP2018139229A (ja) * | 2018-06-14 | 2018-09-06 | ヒロセ電機株式会社 | 電気コネクタ組立体 |
| CN109496377A (zh) * | 2016-08-04 | 2019-03-19 | 京瓷株式会社 | 触头 |
| WO2019171972A1 (ja) * | 2018-03-09 | 2019-09-12 | 京セラ株式会社 | コネクタ及び電子機器 |
| WO2019171973A1 (ja) * | 2018-03-09 | 2019-09-12 | 京セラ株式会社 | コネクタ及び電子機器 |
| US10418731B2 (en) | 2017-08-09 | 2019-09-17 | Hirose Electric Co., Ltd. | Electrical connector for circuit boards and method of manufacture thereof |
| JP2019204798A (ja) * | 2019-09-04 | 2019-11-28 | イリソ電子工業株式会社 | 端子及びコネクタ |
| WO2020044561A1 (ja) * | 2018-08-31 | 2020-03-05 | イリソ電子工業株式会社 | 可動コネクタの接続構造 |
| CN112670732A (zh) * | 2020-12-10 | 2021-04-16 | 合肥中恒微半导体有限公司 | 一种冲压成型的鱼眼端子 |
| WO2021153435A1 (ja) * | 2020-01-29 | 2021-08-05 | 京セラ株式会社 | コネクタ、コネクタモジュール、及び電子機器 |
| JPWO2020084744A1 (ja) * | 2018-10-25 | 2021-09-09 | イリソ電子工業株式会社 | 可動コネクタ及び可動コネクタの接続構造 |
| JP7060153B1 (ja) | 2021-09-07 | 2022-04-26 | Smk株式会社 | コネクタ |
| WO2022168886A1 (ja) * | 2021-02-04 | 2022-08-11 | 京セラ株式会社 | コネクタ及び電子機器 |
Families Citing this family (43)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6553843B2 (ja) * | 2014-03-18 | 2019-07-31 | 日本航空電子工業株式会社 | コネクタ |
| JP1558232S (ja) * | 2015-08-05 | 2016-09-12 | ||
| JP6662633B2 (ja) * | 2015-12-28 | 2020-03-11 | 京セラ株式会社 | フローティングコネクタ装置 |
| GB2547958B (en) * | 2016-03-04 | 2019-12-18 | Commscope Technologies Llc | Two-wire plug and receptacle |
| JP1568182S (ja) * | 2016-04-14 | 2017-01-30 | ||
| JP6727103B2 (ja) * | 2016-11-11 | 2020-07-22 | ヒロセ電機株式会社 | 回路基板用電気コネクタ及びその製造方法 |
| JP6316911B1 (ja) * | 2016-11-24 | 2018-04-25 | イリソ電子工業株式会社 | コネクタ |
| JP6741200B2 (ja) * | 2016-11-28 | 2020-08-19 | Smk株式会社 | コンタクト及びそれを使用したコネクタ |
| JP6746479B2 (ja) * | 2016-12-01 | 2020-08-26 | 株式会社フジクラ | 電気コネクタ |
| JP6415609B2 (ja) | 2017-01-11 | 2018-10-31 | イリソ電子工業株式会社 | 可動コネクタ |
| MX2019011906A (es) | 2017-04-24 | 2019-11-25 | Commscope Technologies Llc | Conectores para un par trenzado simple de conductores. |
| JP6480500B2 (ja) * | 2017-04-28 | 2019-03-13 | 日本航空電子工業株式会社 | コネクタ |
| JP6463410B2 (ja) * | 2017-06-06 | 2019-01-30 | イリソ電子工業株式会社 | 可動コネクタ |
| JP6689235B2 (ja) * | 2017-07-11 | 2020-04-28 | イリソ電子工業株式会社 | コネクタ |
| JP7154683B2 (ja) * | 2017-08-09 | 2022-10-18 | ヒロセ電機株式会社 | 回路基板用電気コネクタ |
| JP6941001B2 (ja) * | 2017-08-09 | 2021-09-29 | ヒロセ電機株式会社 | 回路基板用電気コネクタおよびその製造方法 |
| JP7032094B2 (ja) * | 2017-10-06 | 2022-03-08 | 京セラ株式会社 | コネクタ及び電子機器 |
| JP6415666B1 (ja) * | 2017-10-06 | 2018-10-31 | イリソ電子工業株式会社 | コネクタ |
| JP6998738B2 (ja) * | 2017-11-14 | 2022-01-18 | イリソ電子工業株式会社 | 電気接続用端子及びこれを備えたコネクタ |
| JP6463446B1 (ja) | 2017-11-16 | 2019-02-06 | イリソ電子工業株式会社 | 可動コネクタ |
| JP2019102373A (ja) * | 2017-12-07 | 2019-06-24 | モレックス エルエルシー | フローティングコネクタ |
| JP6959876B2 (ja) * | 2018-01-25 | 2021-11-05 | 日本航空電子工業株式会社 | コネクタ |
| CN108199165A (zh) * | 2018-02-28 | 2018-06-22 | 成都瑞联电气股份有限公司 | 一种多功能安装屏回路切换装置 |
| JP2019192527A (ja) * | 2018-04-26 | 2019-10-31 | ヒロセ電機株式会社 | 回路基板用電気コネクタ |
| JP6951669B2 (ja) * | 2018-06-04 | 2021-10-20 | 株式会社オートネットワーク技術研究所 | コネクタ及びコネクタ装置 |
| JP6770998B2 (ja) * | 2018-06-26 | 2020-10-21 | タイコエレクトロニクスジャパン合同会社 | 電気コネクタ |
| JP7268979B2 (ja) * | 2018-09-07 | 2023-05-08 | ヒロセ電機株式会社 | 電気コネクタ組立体及びこれに用いられる電気コネクタ |
| JP7093283B2 (ja) * | 2018-10-04 | 2022-06-29 | 日本航空電子工業株式会社 | コネクタ |
| JP7207975B2 (ja) | 2018-11-29 | 2023-01-18 | イリソ電子工業株式会社 | コネクタ |
| JP7059921B2 (ja) * | 2018-12-25 | 2022-04-26 | 住友電装株式会社 | コネクタ組立体 |
| MX2021011116A (es) | 2019-03-15 | 2021-10-13 | Commscope Technologies Llc | Conectores y contactos para un par de conductores de retorcedura unica. |
| WO2020209027A1 (ja) * | 2019-04-10 | 2020-10-15 | パナソニックIpマネジメント株式会社 | コネクタ、接続装置及び接続方法 |
| JP2020174034A (ja) * | 2019-04-10 | 2020-10-22 | パナソニックIpマネジメント株式会社 | コネクタ、接続装置及び接続方法 |
| CN113661616B (zh) * | 2019-04-19 | 2023-08-15 | 三菱电机株式会社 | 试验装置、试验方法以及组装线 |
| JP6687790B1 (ja) * | 2019-07-26 | 2020-04-28 | 京セラ株式会社 | コネクタ及び電子機器 |
| JP7454344B2 (ja) | 2019-08-05 | 2024-03-22 | イリソ電子工業株式会社 | ライトアングルコネクタと接続対象物との嵌合構造及びライトアングルコネクタと接続対象物との嵌合方法 |
| JP7206170B2 (ja) * | 2019-09-02 | 2023-01-17 | 京セラ株式会社 | ソケット及び電子機器 |
| JP7186900B2 (ja) * | 2019-12-05 | 2022-12-09 | 三菱電機株式会社 | コネクタ嵌合装置およびコネクタ嵌合方法 |
| JP2022068976A (ja) * | 2020-10-23 | 2022-05-11 | 住友電装株式会社 | コネクタ構造 |
| TWI753658B (zh) * | 2020-11-16 | 2022-01-21 | 禾昌興業股份有限公司 | 具有電源電極結構之浮動連接器 |
| JP7377187B2 (ja) * | 2020-12-02 | 2023-11-09 | ヒロセ電機株式会社 | 回路基板用電気コネクタ及び電気コネクタ組立体 |
| JP7273077B2 (ja) * | 2021-01-15 | 2023-05-12 | 矢崎総業株式会社 | 基板ユニット及び基板ユニットの製造方法 |
| WO2023223874A1 (ja) * | 2022-05-17 | 2023-11-23 | 京セラ株式会社 | コネクタ及び電子機器 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0732878U (ja) * | 1993-11-29 | 1995-06-16 | 日本エー・エム・ピー株式会社 | 遊動型リセプタクルコネクタ |
| JPH07282922A (ja) * | 1994-04-08 | 1995-10-27 | Hosiden Corp | コネクタ |
| JP2014067706A (ja) * | 2012-09-05 | 2014-04-17 | Iriso Electronics Co Ltd | コネクタ |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2552225B2 (ja) * | 1992-07-16 | 1996-11-06 | モレックス インコーポレーテッド | フローティングタイプの電気コネクタ |
| JP3396343B2 (ja) * | 1995-07-21 | 2003-04-14 | 富士通株式会社 | 基 板 |
| US5873742A (en) * | 1996-06-18 | 1999-02-23 | Hon Hai Precision Ind. Co., Ltd. | Board-to-board connector assembly |
| JP3746106B2 (ja) * | 1996-06-27 | 2006-02-15 | タイコエレクトロニクスアンプ株式会社 | 基板用電気コネクタ |
| JPH11149953A (ja) * | 1997-11-18 | 1999-06-02 | Mitsubishi Electric Corp | 電子機器 |
| JP2004214091A (ja) * | 2003-01-07 | 2004-07-29 | Jst Mfg Co Ltd | 可動型コネクタ用コンタクトおよびそれを用いた可動型コネクタ |
| JP3929946B2 (ja) * | 2003-07-29 | 2007-06-13 | 矢崎総業株式会社 | コネクタ |
| JP2005196975A (ja) * | 2003-12-26 | 2005-07-21 | Jst Mfg Co Ltd | コネクタ |
| JP5006610B2 (ja) * | 2006-10-05 | 2012-08-22 | イリソ電子工業株式会社 | コネクタ |
| JP2010272320A (ja) * | 2009-05-20 | 2010-12-02 | Fujitsu Component Ltd | コネクタ装置 |
| JP2011249076A (ja) * | 2010-05-25 | 2011-12-08 | Fujitsu Component Ltd | フローティングコネクタ |
| JP5631074B2 (ja) * | 2010-06-28 | 2014-11-26 | モレックス インコーポレイテドMolex Incorporated | 基板対基板コネクタ |
| JP5254474B1 (ja) * | 2012-01-24 | 2013-08-07 | イリソ電子工業株式会社 | 電気接続用端子及びこれを用いたコネクタ |
| JP5964673B2 (ja) * | 2012-06-28 | 2016-08-03 | タイコエレクトロニクスジャパン合同会社 | 電気コネクタ及びメス型端子 |
| JP5405640B1 (ja) * | 2012-10-05 | 2014-02-05 | 日本航空電子工業株式会社 | コネクタ |
| JP5606588B1 (ja) * | 2013-05-20 | 2014-10-15 | イリソ電子工業株式会社 | コネクタ |
| JP5938067B2 (ja) * | 2013-05-24 | 2016-06-22 | イリソ電子工業株式会社 | コネクタ |
| JP6116056B2 (ja) * | 2013-08-07 | 2017-04-19 | 日本航空電子工業株式会社 | コネクタ |
| JP5481594B1 (ja) * | 2013-08-09 | 2014-04-23 | イリソ電子工業株式会社 | コネクタ端子及び電気コネクタ |
| TWI525920B (zh) * | 2013-09-05 | 2016-03-11 | 意力速電子工業股份有限公司 | 連接器 |
| JP5568677B1 (ja) | 2013-11-13 | 2014-08-06 | イリソ電子工業株式会社 | 電気コネクタ |
| EP2874238A1 (en) * | 2013-11-13 | 2015-05-20 | Iriso Electronics Co., Ltd. | Connector terminal and electrical connector |
| JP1529958S (ja) * | 2014-12-19 | 2015-07-27 |
-
2015
- 2015-04-01 JP JP2015075394A patent/JP5849166B1/ja active Active
- 2015-08-18 JP JP2015161068A patent/JP6219892B2/ja active Active
- 2015-08-18 JP JP2015161066A patent/JP6595252B2/ja active Active
-
2016
- 2016-03-30 EP EP16162863.1A patent/EP3076490B1/en active Active
- 2016-03-31 CN CN201610201889.9A patent/CN106058538B/zh active Active
- 2016-03-31 CN CN201610200829.5A patent/CN106058569B/zh active Active
- 2016-03-31 US US15/086,344 patent/US20160294089A1/en not_active Abandoned
- 2016-03-31 EP EP16163177.5A patent/EP3076491A1/en not_active Withdrawn
- 2016-03-31 US US15/086,259 patent/US9698508B2/en active Active
-
2019
- 2019-03-28 JP JP2019065028A patent/JP6704075B2/ja active Active
- 2019-09-25 JP JP2019173811A patent/JP6928047B2/ja active Active
- 2019-09-25 JP JP2019173810A patent/JP6944980B2/ja active Active
-
2021
- 2021-09-13 JP JP2021148940A patent/JP7295184B2/ja active Active
-
2023
- 2023-04-10 JP JP2023063507A patent/JP2023083371A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0732878U (ja) * | 1993-11-29 | 1995-06-16 | 日本エー・エム・ピー株式会社 | 遊動型リセプタクルコネクタ |
| JPH07282922A (ja) * | 1994-04-08 | 1995-10-27 | Hosiden Corp | コネクタ |
| JP2014067706A (ja) * | 2012-09-05 | 2014-04-17 | Iriso Electronics Co Ltd | コネクタ |
Cited By (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017135020A (ja) * | 2016-01-28 | 2017-08-03 | イリソ電子工業株式会社 | コネクタ |
| JP2017182891A (ja) * | 2016-03-28 | 2017-10-05 | イリソ電子工業株式会社 | 中継コネクタ |
| EP3249752A1 (en) * | 2016-05-23 | 2017-11-29 | Hirose Electric Co., Ltd. | Connecting structure |
| JP2017212025A (ja) * | 2016-05-23 | 2017-11-30 | ヒロセ電機株式会社 | 回路基板用電気コネクタと相手接続部材との接続構造 |
| CN107453067A (zh) * | 2016-05-23 | 2017-12-08 | 广濑电机株式会社 | 电路基板用电连接器与对象连接部件的连接结构 |
| US9917403B2 (en) | 2016-05-23 | 2018-03-13 | Hirose Electric Co., Ltd. | Connecting structure having a regulating portion to control deformation of an elastic portion of a terminal in an electrical connector |
| JP2018006039A (ja) * | 2016-06-28 | 2018-01-11 | イリソ電子工業株式会社 | コネクタ |
| CN109496377A (zh) * | 2016-08-04 | 2019-03-19 | 京瓷株式会社 | 触头 |
| US10862234B2 (en) | 2016-08-04 | 2020-12-08 | Kyocera Corporation | Electrical contact terminal |
| JPWO2018025875A1 (ja) * | 2016-08-04 | 2019-06-06 | 京セラ株式会社 | コンタクト |
| CN107706569A (zh) * | 2016-08-09 | 2018-02-16 | 广濑电机株式会社 | 电路基板用电连接器 |
| CN107799932B (zh) * | 2016-08-29 | 2021-01-15 | 广濑电机株式会社 | 电路基板用电连接器 |
| CN107799932A (zh) * | 2016-08-29 | 2018-03-13 | 广濑电机株式会社 | 电路基板用电连接器 |
| US10418731B2 (en) | 2017-08-09 | 2019-09-17 | Hirose Electric Co., Ltd. | Electrical connector for circuit boards and method of manufacture thereof |
| JP2019160492A (ja) * | 2018-03-09 | 2019-09-19 | 京セラ株式会社 | コネクタ及び電子機器 |
| JP2019160493A (ja) * | 2018-03-09 | 2019-09-19 | 京セラ株式会社 | コネクタ及び電子機器 |
| US11349240B2 (en) | 2018-03-09 | 2022-05-31 | Kyocera Corporation | Floating connector and electronic device |
| WO2019171973A1 (ja) * | 2018-03-09 | 2019-09-12 | 京セラ株式会社 | コネクタ及び電子機器 |
| WO2019171972A1 (ja) * | 2018-03-09 | 2019-09-12 | 京セラ株式会社 | コネクタ及び電子機器 |
| JP2018139229A (ja) * | 2018-06-14 | 2018-09-06 | ヒロセ電機株式会社 | 電気コネクタ組立体 |
| WO2020044561A1 (ja) * | 2018-08-31 | 2020-03-05 | イリソ電子工業株式会社 | 可動コネクタの接続構造 |
| JPWO2020044561A1 (ja) * | 2018-08-31 | 2021-08-10 | イリソ電子工業株式会社 | 可動コネクタの接続構造 |
| JP7239593B2 (ja) | 2018-08-31 | 2023-03-14 | イリソ電子工業株式会社 | 可動コネクタの接続構造 |
| JPWO2020084744A1 (ja) * | 2018-10-25 | 2021-09-09 | イリソ電子工業株式会社 | 可動コネクタ及び可動コネクタの接続構造 |
| JP7376499B2 (ja) | 2018-10-25 | 2023-11-08 | イリソ電子工業株式会社 | 可動コネクタ及び可動コネクタの接続構造 |
| JP2019204798A (ja) * | 2019-09-04 | 2019-11-28 | イリソ電子工業株式会社 | 端子及びコネクタ |
| WO2021153435A1 (ja) * | 2020-01-29 | 2021-08-05 | 京セラ株式会社 | コネクタ、コネクタモジュール、及び電子機器 |
| CN112670732A (zh) * | 2020-12-10 | 2021-04-16 | 合肥中恒微半导体有限公司 | 一种冲压成型的鱼眼端子 |
| WO2022168886A1 (ja) * | 2021-02-04 | 2022-08-11 | 京セラ株式会社 | コネクタ及び電子機器 |
| JP7060153B1 (ja) | 2021-09-07 | 2022-04-26 | Smk株式会社 | コネクタ |
| JP2023038852A (ja) * | 2021-09-07 | 2023-03-17 | Smk株式会社 | コネクタ |
Also Published As
| Publication number | Publication date |
|---|---|
| US20160294089A1 (en) | 2016-10-06 |
| US20160294111A1 (en) | 2016-10-06 |
| CN106058538B (zh) | 2021-06-01 |
| EP3076490B1 (en) | 2020-03-04 |
| JP2023083371A (ja) | 2023-06-15 |
| JP2016181494A (ja) | 2016-10-13 |
| JP2019125585A (ja) | 2019-07-25 |
| JP6219892B2 (ja) | 2017-10-25 |
| CN106058538A (zh) | 2016-10-26 |
| CN106058569A (zh) | 2016-10-26 |
| JP2019216119A (ja) | 2019-12-19 |
| JP2019216120A (ja) | 2019-12-19 |
| JP2021192384A (ja) | 2021-12-16 |
| JP6928047B2 (ja) | 2021-09-01 |
| JP2016181495A (ja) | 2016-10-13 |
| CN106058569B (zh) | 2020-04-14 |
| US9698508B2 (en) | 2017-07-04 |
| JP6704075B2 (ja) | 2020-06-03 |
| EP3076491A1 (en) | 2016-10-05 |
| EP3076490A1 (en) | 2016-10-05 |
| JP7295184B2 (ja) | 2023-06-20 |
| JP6944980B2 (ja) | 2021-10-06 |
| JP6595252B2 (ja) | 2019-10-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5849166B1 (ja) | 基板間接続構造 | |
| US9088113B2 (en) | Connector | |
| JP5603790B2 (ja) | フローティング型コネクタ | |
| EP2846409A2 (en) | Connector | |
| EP2846414A1 (en) | Connector | |
| JP2014099361A (ja) | 電気接続用端子及びこれを備えたコネクタ | |
| EP3340389A1 (en) | Connector device | |
| KR102114505B1 (ko) | 커넥터 | |
| JP3192828U (ja) | 電気コネクタ | |
| JP2016018694A (ja) | コネクタ | |
| JP2014099391A (ja) | 電気接続用端子及びこれを備えたコネクタ | |
| JP3109261U (ja) | シールド及びシールドを具えたコネクタ | |
| KR20180036289A (ko) | 기판 간 접속구조 | |
| JP2022099899A (ja) | コネクタの接続構造 | |
| JP6212935B2 (ja) | 電気コネクタ | |
| JP2021026889A (ja) | ライトアングルコネクタと接続対象物との嵌合構造及びライトアングルコネクタと接続対象物との嵌合方法 | |
| KR20130116893A (ko) | 가요성 인쇄회로기판 커넥터 | |
| CN102856699A (zh) | 连接器 | |
| JP2007287441A (ja) | コネクタ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150401 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20150407 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20150615 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150619 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150818 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150929 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20151029 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20151130 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5849166 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |