JP5513396B2 - インピーダンス確定方法及び装置 - Google Patents
インピーダンス確定方法及び装置 Download PDFInfo
- Publication number
- JP5513396B2 JP5513396B2 JP2010531375A JP2010531375A JP5513396B2 JP 5513396 B2 JP5513396 B2 JP 5513396B2 JP 2010531375 A JP2010531375 A JP 2010531375A JP 2010531375 A JP2010531375 A JP 2010531375A JP 5513396 B2 JP5513396 B2 JP 5513396B2
- Authority
- JP
- Japan
- Prior art keywords
- signal
- subject
- electrode
- voltage
- processing system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 60
- 238000012545 processing Methods 0.000 claims description 106
- 238000005259 measurement Methods 0.000 claims description 69
- 238000002847 impedance measurement Methods 0.000 claims description 47
- 230000008878 coupling Effects 0.000 claims description 41
- 238000010168 coupling process Methods 0.000 claims description 41
- 238000005859 coupling reaction Methods 0.000 claims description 41
- 230000008569 process Effects 0.000 claims description 39
- 238000001514 detection method Methods 0.000 claims description 24
- 239000003990 capacitor Substances 0.000 claims description 19
- 239000000758 substrate Substances 0.000 claims description 19
- 230000001939 inductive effect Effects 0.000 claims description 15
- 230000008859 change Effects 0.000 claims description 10
- 210000003414 extremity Anatomy 0.000 description 24
- 238000004458 analytical method Methods 0.000 description 21
- 230000015654 memory Effects 0.000 description 14
- 230000000694 effects Effects 0.000 description 13
- 229920005994 diacetyl cellulose Polymers 0.000 description 11
- 210000002414 leg Anatomy 0.000 description 11
- 238000010586 diagram Methods 0.000 description 10
- 206010030113 Oedema Diseases 0.000 description 9
- 210000003423 ankle Anatomy 0.000 description 9
- 210000000707 wrist Anatomy 0.000 description 9
- 238000011067 equilibration Methods 0.000 description 8
- 230000003071 parasitic effect Effects 0.000 description 8
- 239000000203 mixture Substances 0.000 description 7
- 238000004364 calculation method Methods 0.000 description 5
- 230000004217 heart function Effects 0.000 description 5
- 206010025282 Lymphoedema Diseases 0.000 description 4
- 230000001808 coupling effect Effects 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 208000002502 lymphedema Diseases 0.000 description 4
- 241001465754 Metazoa Species 0.000 description 3
- 239000008186 active pharmaceutical agent Substances 0.000 description 3
- 210000003127 knee Anatomy 0.000 description 3
- 238000000926 separation method Methods 0.000 description 3
- 208000024891 symptom Diseases 0.000 description 3
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 2
- 238000011871 bio-impedance analysis Methods 0.000 description 2
- 239000000090 biomarker Substances 0.000 description 2
- 201000010099 disease Diseases 0.000 description 2
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 2
- 230000001965 increasing effect Effects 0.000 description 2
- 239000007788 liquid Substances 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000010363 phase shift Effects 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 229910052709 silver Inorganic materials 0.000 description 2
- 239000004332 silver Substances 0.000 description 2
- 208000031872 Body Remains Diseases 0.000 description 1
- 241000777300 Congiopodidae Species 0.000 description 1
- YJPIGAIKUZMOQA-UHFFFAOYSA-N Melatonin Natural products COC1=CC=C2N(C(C)=O)C=C(CCN)C2=C1 YJPIGAIKUZMOQA-UHFFFAOYSA-N 0.000 description 1
- 241000288906 Primates Species 0.000 description 1
- 206010037423 Pulmonary oedema Diseases 0.000 description 1
- 229910021607 Silver chloride Inorganic materials 0.000 description 1
- 230000003187 abdominal effect Effects 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 239000000654 additive Substances 0.000 description 1
- 230000000996 additive effect Effects 0.000 description 1
- 210000003484 anatomy Anatomy 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000002457 bidirectional effect Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 230000000747 cardiac effect Effects 0.000 description 1
- 210000000038 chest Anatomy 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 229940079593 drug Drugs 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 210000003722 extracellular fluid Anatomy 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 239000002783 friction material Substances 0.000 description 1
- 230000008571 general function Effects 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 230000003862 health status Effects 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000003834 intracellular effect Effects 0.000 description 1
- 210000002977 intracellular fluid Anatomy 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 230000013011 mating Effects 0.000 description 1
- DRLFMBDRBRZALE-UHFFFAOYSA-N melatonin Chemical compound COC1=CC=C2NC=C(CCNC(C)=O)C2=C1 DRLFMBDRBRZALE-UHFFFAOYSA-N 0.000 description 1
- 229960003987 melatonin Drugs 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 239000013518 molded foam Substances 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 150000003071 polychlorinated biphenyls Chemical class 0.000 description 1
- 208000005333 pulmonary edema Diseases 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000008054 signal transmission Effects 0.000 description 1
- HKZLPVFGJNLROG-UHFFFAOYSA-M silver monochloride Chemical compound [Cl-].[Ag+] HKZLPVFGJNLROG-UHFFFAOYSA-M 0.000 description 1
- 238000004611 spectroscopical analysis Methods 0.000 description 1
- 238000010408 sweeping Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000009885 systemic effect Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 210000000115 thoracic cavity Anatomy 0.000 description 1
- 210000001519 tissue Anatomy 0.000 description 1
- 210000000689 upper leg Anatomy 0.000 description 1
Images





















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R1/00—Details of instruments or arrangements of the types included in groups G01R5/00 - G01R13/00 and G01R31/00
- G01R1/02—General constructional details
- G01R1/18—Screening arrangements against electric or magnetic fields, e.g. against earth's field
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
- A61B5/053—Measuring electrical impedance or conductance of a portion of the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/72—Signal processing specially adapted for physiological signals or for diagnostic purposes
- A61B5/7203—Signal processing specially adapted for physiological signals or for diagnostic purposes for noise prevention, reduction or removal
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R1/00—Details of instruments or arrangements of the types included in groups G01R5/00 - G01R13/00 and G01R31/00
- G01R1/02—General constructional details
- G01R1/06—Measuring leads; Measuring probes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R1/00—Details of instruments or arrangements of the types included in groups G01R5/00 - G01R13/00 and G01R31/00
- G01R1/30—Structural combination of electric measuring instruments with basic electronic circuits, e.g. with amplifier
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R27/00—Arrangements for measuring resistance, reactance, impedance, or electric characteristics derived therefrom
- G01R27/02—Measuring real or complex resistance, reactance, impedance, or other two-pole characteristics derived therefrom, e.g. time constant
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6885—Monitoring or controlling sensor contact pressure
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Animal Behavior & Ethology (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Surgery (AREA)
- Molecular Biology (AREA)
- Signal Processing (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Artificial Intelligence (AREA)
- Psychiatry (AREA)
- Physiology (AREA)
- Measurement And Recording Of Electrical Phenomena And Electrical Characteristics Of The Living Body (AREA)
- Investigating Or Analyzing Materials By The Use Of Electric Means (AREA)
Description
第1の広い形態では、本発明は、被験体に対してインピーダンス測定を行う際に用いられる装置を提供しようとするものであり、本装置は、
a)被験体に第1信号が印加されるようにし、
b)被験体において測定される第2信号の指示を確定し、
c)第2信号の指示を用いて、許容できない不平衡が存在するか否かを確定し、
d)許容できない不平衡が存在する場合、
i)不平衡に従って、変更第1信号を確定し、
ii)変更第1信号が被験体に印加されるようにし、それにより少なくとも1つのインピーダンス測定が行われ得るようにする
処理システムを有する。
a)第2信号を閾値と比較し、
b)比較の結果に応じて許容できない不平衡が存在するか否かを確定する。
a)第2電極の各々において検知される電圧を確定し、
b)加算電圧を確定し、
c)加算電圧を用いて不平衡を確定する。
概して、処理システムは、不平衡を低減するように変更第1信号を確定する。
概して、第1信号は、少なくとも2つの第1電極を介して被験体に印加され、処理システムは、第1電極のうちの少なくとも1つに印加される少なくとも1つの第1信号の位相および大きさのうちの少なくとも一方を変更することにより、第1信号を変更する。
a)第1信号は、被験体の第1肢および第2肢に結合された第1電極を介して印加され、
b)第2信号は、被験体の第3肢および第4肢に結合された第2電極を介して検知され、第3肢および第4肢は前記第1肢および第2肢とは異なる。
a)第1信号が第1電極を介して印加されるようにし、
b)複数の第2電極の各々において検知される第2信号の指示を確定し、
c)第2電極のうちの選択されたものにおいて検知される第2信号を選択し、
d)選択された第2信号を用いて不平衡が存在するかどうかを確定する。
概して、処理システムは、
a)第1信号を被験体に印加することによってもたらされる検知電流を確定し、
b)被験体にかかる検知電圧を確定し、
c)検知電流および検知電圧を用いてインピーダンスパラメータを確定する
ことにより、インピーダンス測定を行う。
a)第1信号を被験体に印加することによってもたらされる検知電流を確定し、
b)検知電流を閾値と比較し、
c)比較の結果に応じてインピーダンス測定プロセスを選択的に停止する。
a)第1信号を被験体に印加することによってもたらされる検知電流を確定し、
b)変更第1信号を確定するために検知電流を用いる。
a)第1信号が第1周波数で被験体に印加されるようにし、
b)被験体において測定される第2信号の指示を確定し、
c)第2信号の指示を用いて不平衡が存在するかどうかを確定し、
d)許容できない不平衡が存在しない場合、少なくとも第2信号の指示を用いて少なくとも1つのインピーダンス値を確定し、
e)許容できない不平衡が存在する場合、
i)不平衡に従って変更第1信号を確定し、
ii)変更第1信号が被験体に印加されるようにし、
iii)被験体において測定される変更第2信号の指示を確定し、
iv)変更第2信号の指示に対してステップc)〜e)を繰り返し、
f)少なくとも1つの第2周波数に対してステップa)〜e)を繰り返す。
a)第1電極を介して、電圧駆動信号が被験体に印加されるようにし、
b)電圧駆動信号によってもたらされる検知電流信号を確定し、
c)それぞれの第2電極を介して測定される検知電圧を確定し、
d)検知電圧から身体中心電圧を確定し、
e)検知電流信号、電圧駆動信号および身体中心電圧を用いて、被験体に対する上部インピーダンスおよび下部インピーダンスを確定し、
f)上部インピーダンスおよび下部インピーダンスならびに理想電流信号指示を用いて、変更電圧駆動信号を確定する。
a)第1位相、
b)第1大きさ、
c)第2位相、および
d)第2大きさ
のうちの少なくとも1つを変更することにより、変更電圧駆動信号を確定する。
a)変更電圧駆動信号が被験体に印加されるようにし、
b)それぞれの第2電極を介して測定される検知電圧を確定し、
c)検知電圧を用いて許容できない不平衡が存在するか否かを確定し、
d)許容できない不平衡が存在する場合、
i)さらなる変更電圧駆動信号を確定し、
ii)あらゆる不平衡が許容可能となるまでステップ(a)〜(d)を繰り返す。
概して、本処理システムは、
a)第1周波数に対し、
i)許容可能な不平衡をもたらす変更第1信号を確定するステップと、
ii)変更第1信号を用いてインピーダンス測定が行われるようにするステップと、
b)第2周波数に対し、
i)被験体に第1信号が印加されるようにするステップであって、第1信号が、第1周波数に対して確定された変更第1信号に基づく、ステップと、
ii)許容できない不平衡が存在するか否かを確定するステップと、
を含む。
a)第1周波数に対し、
i)それぞれの第1電極を介して被験体に第1電圧駆動信号および第2電圧駆動信号が印加されるようにするステップと、
ii)許容可能な不平衡をもたらす変更第1電圧駆動信号および変更第2電圧駆動信号を確定するステップであって、第1電圧駆動信号が第1大きさおよび第1位相を有し、第2電圧駆動信号が第2大きさおよび第2位相を有する、ステップと
b)第2周波数に対し、
i)被験体に対し第1電圧駆動信号および第2電圧駆動信号が印加されるようにするステップであって、第1電圧駆動信号が第1大きさおよび第1位相を有し、第2電圧駆動信号が第2大きさおよび第2位相を有する、ステップと、
ii)許容できない不平衡が存在するか否かを確定するステップと、
を含む。
a)制御信号を生成し、
b)制御信号を少なくとも1つの信号発生器に転送することにより、第1信号が被験体に印加されるようにし、
c)少なくとも1つの信号発生器から、被験体に印加される1つまたは複数の信号の指示を受け取り、
d)少なくとも1つのセンサから、被験体において測定される1つまたは複数の第2信号の指示を受け取り、
e)指示の少なくとも予備処理を行うことにより、インピーダンス値が確定され得るようにする。
概して、差動増幅器は、
a)第2電極において測定される電圧を示す差動電圧、および
b)不平衡が存在するかどうかを示すコモンモード信号
の少なくとも一方を生成する。
概して、各信号発生器は、
a)処理システムから1つまたは複数の制御信号を受け取り、
b)制御信号を増幅し、それにより第1信号を生成する。
a)第1信号を被験体に印加することによってもたらされる検知電流を確定し、
b)検知電流の指示を処理システムに供給する。
概して、本装置は、第2電極を介して第2信号を測定する少なくとも1つのセンサを有する。
概して、本装置は、複数の電極システムを有し、各電極システムは、
a)センサ、および
b)信号発生器
を有する。
a)信号発生器およびセンサが実装されている第1基板と、
b)少なくとも2つの導電性パッドが実装されている第2基板であって、導電性パッドが、使用時に信号発生器およびセンサを被験体に結合するための第1電極および第2電極を形成する、第2基板と、
を有する。
概して、容量キャンセル回路は、信号発生器出力をセンサ入力に結合するための反転増幅器を有する。
概して、反転増幅器出力は、
a)抵抗器、
b)コンデンサ、および
c)インダクタ
のうちの少なくとも1つを介してセンサ入力に結合される。
概して、電極システムは、センサ入力における実効入力静電容量をキャンセルするための入力容量キャンセル回路を含む。
概して、フィードバックループは、
a)抵抗器、
b)コンデンサ、および
c)インダクタ
のうちの少なくとも1つを含む。
概して、フィードバックループは、センサ入力に入力容量キャンセル信号を印加し、それによりセンサ入力におけるいかなる実効静電容量もキャンセルする。
a)複数の電極システムであって、各電極システムが信号発生器およびセンサを有する、電極システムと、
b)測定装置を電極システムに接続するための複数のリードであって、各リードが、
i)測定装置と信号発生器とを接続し、測定装置とセンサとを接続するための少なくとも2つの接続と、
ii)少なくとも2つの接続の各々に対するシールドであって、電気的に接続され、かつ測定装置および電極システムの各々において基準電圧に接続される、シールドと、
を有するリードと、
を有する。
a)少なくとも2つの電極システムであって、各電極システムが、
i)第1信号を被験体に印加する信号発生器と、
ii)被験体における第2信号を検知するセンサと、
iii)信号発生器を被験体に結合する第1電極と、
iv)センサを被験体に結合する第2電極と、
を有する電極システムと、
b)インピーダンス測定を行うことができるように電極システムを制御する測定装置と、
c)測定装置を電極システムに接続するための少なくとも2つのリードと、
を有する。
i)測定装置から異なる方向に延在し、それによりそれらの間の誘導結合を低減し、かつ/または
ii)リード長を最小限にする
ように配置される。
a)コンピュータシステムから受け取った命令に従って制御信号を生成し、
b)インピーダンス値を確定することができるように、測定されたインピーダンス値を示すデータをコンピュータシステムに提供する。
第2の広い形態では、本発明は、被験体に対してインピーダンス測定を行う際に用いられる装置を提供しようとするものであり、本装置は、複数の電極システムを有し、各電極システムは、
a)信号発生器およびセンサが実装されている第1基板であって、信号発生器が被験体に第1信号を印加するためのものであり、センサが被験体において第2信号を検知するためのものである、第1基板と、
b)少なくとも2つの導電性パッドが実装されている第2基板であって、導電性パッドが、使用時に信号発生器およびセンサを被験体に結合するための第1電極および第2電極を形成する、第2基板と、
を有する。
概して、容量キャンセル回路は、信号発生器出力をセンサ入力に結合するための反転増幅器を有する。
概して、反転増幅器出力は、
a)抵抗器、
b)コンデンサ、および
c)インダクタ
のうちの少なくとも1つを介してセンサ入力に結合される。
概して、電極システムは、センサ入力において実効入力静電容量をキャンセルするための入力容量キャンセル回路を有する。
概して、フィードバックループは、
a)抵抗器、
b)コンデンサ、および
c)インダクタ
のうちの少なくとも1つを有する。
概して、フィードバックループは、センサ入力に入力容量キャンセル信号を印加し、それによりセンサ入力におけるいかなる実効静電容量もキャンセルする。
a)複数の電極システムであって、各電極システムが信号発生器およびセンサを有し、信号発生器が被験体に第1信号を印加し、センサが被験体において第2信号を検知する、電極システムと、
b)測定装置を電極システムに接続するための複数のリードであって、各リードは、
i)測定装置と信号発生器とを接続し、測定装置とセンサとを接続するための少なくとも2つの接続と、
ii)少なくとも2つの接続の各々に対するシールドであって、電気的に接続され、かつ測定装置および電極システムの各々において基準電圧に接続される、シールドと、
を有するリードと、
を有する。
a)少なくとも2つの電極システムと、
b)インピーダンス測定を行うことができるように電極システムを制御する測定装置と、
c)測定装置を電極システムに接続するための少なくとも2つのリードと、
を有する。
a)測定装置から異なる方向に延在し、それによりそれらの間の誘導結合を低減し、かつ/または
b)リード長を最小限にする
ように配置される。
a)少なくとも2つの電極システムであって、各電極システムが信号発生器およびセンサを有し、信号発生器が被験体に第1信号を印加するためのものであり、センサが被験体において第2信号を検知するためのものである、電極システムと、
b)インピーダンス測定を行うことができるように電極システムを制御するための測定装置と、
c)測定装置を電極システムに接続するための少なくとも2つのリードであって、
i)測定装置から異なる方向に延在し、それによりそれらの間の誘導結合を低減し、かつ/または
ii)リード長を最小限にする
ように配置されるリードと、
を有する。
a)4つの電極システムと、
b)測定装置から4つの異なる方向に延在する4つのリードと、
を有する。
a)測定装置を信号発生器に結合し、それにより、測定装置が、第1信号を被験体に印加するように信号発生器を制御することができるようにするための、第1ケーブルと、
b)測定装置を信号発生器に結合し、それにより、被験体に印加される第1信号に関連するパラメータを測定装置が確定することができるようにするための、第2ケーブルと、
c)測定装置をセンサ発生器に結合し、それにより、被験体において測定される電圧を測定装置が確定することができるようにするための、第3ケーブルと、
を有する。
a)信号発生器およびセンサが実装されている第1基板と、
b)少なくとも2つの導電性パッドが実装されている第2基板であって、導電性パッドが、使用時に信号発生器およびセンサを被験体に結合するためのものである、第2基板と、
を有する。
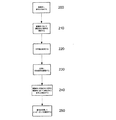
a)被験体に第1信号が印加されるようにするステップと、
b)被験体において測定される第2信号の指示を確定するステップと、
c)第2信号の指示を用いて不平衡が存在するかどうか確定するステップと、
d)不平衡が存在する場合、
i)不平衡に従って変更第1信号を確定し、
ii)変更第1信号が被験体に印加されるようにし、それにより少なくとも1つのインピーダンス測定を行うことができるようにするステップと、
を含む。
a)被験体の少なくとも1つの手首と少なくとも1つの足首とに第1電極および第2電極の対を提供するステップと、
b)電極の各対を電極システムに結合するステップであって、電極システムが信号発生器およびセンサを有し、信号発生器が第1電極を介して第1信号を被験体に印加するためのものであり、センサが第2電極を介して第2信号を検知するためのものである、ステップと、
c)被験体の膝の近くに測定装置を配置するステップであって、インピーダンス測定を行うことができるように測定装置が電極システムを制御するためのものである、ステップと、
d)それぞれのリードを介して測定装置を電極システムに結合するステップであって、リードが測定装置から異なる方向に延在する、ステップと、
を含む。
図示するように、装置は、処理システム102を有する測定装置100を有しており、処理システム102は、1つまたは複数の信号発生器117A、117Bにそれぞれ第1リード123A、123Bを介して接続され、1つまたは複数のセンサ118A、118Bにそれぞれ第2リード125A、125Bを介して接続されている。接続は、マルチプレクサ等の切替装置を介してもよいが、これは必須ではない。
BISの場合、インピーダンス測定値またはアドミッタンス測定値は、記録された電圧および被験体を通る電流信号を比較することにより、各周波数の信号から確定される。そして、復調アルゴリズムは各周波数で振幅信号および位相信号を生成することができる。
したがって、第1電圧は、差動増幅器を用いて確定することができる加算電圧(一般に、コモンモード電圧または信号と呼ばれる)であり得る。
ステップ200において、被験体Sに第1信号を印加し、ステップ210において、被験体Sにおいて測定された第2信号を確定する。これは、通常、上で概説した技法を用いて達成される。したがって、処理システム102は、信号発生器117A、117Bに対し第1信号を発生させ、これは、通常、第1電極113A、113Bを介して被験体Sに印加される。同様に、第2信号が、第2電極115A、115Bを介してセンサ118A、118Bによって検知され、第2信号の指示は処理システム102に提供される。
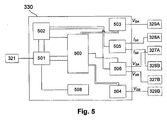
この例では、測定システム300は、コンピュータシステム310と別個の測定装置320とを有している。測定装置320は、コンピュータシステム310との有線通信または無線通信を可能にするインタフェース321に結合された処理システム330を有している。処理システム330を、任意に、322、323、324、325、326に示すように、種々のタイプのメモリ等の1つまたは複数の記憶装置に結合してもよい。
ここで、図5を参照して処理システム330によって実装される機能の一例について説明する。この例では、処理システム330は、適当なソフトウェア制御を用いて機能を実装するが、任意の好適なメカニズムを用いてもよい。
ステップ600において、コンピュータシステム310を用いてインピーダンス測定タイプを選択する。これによりコンピュータシステム310がトリガされ、組込みソフトウェア等の所望の命令が処理システム330によって実施される。これを、必要な組込みソフトウェアをコンピュータシステム310から処理システム330にダウンロードすることにより、または別法として処理システム330に内部メモリ等から関連する組込みソフトウェアを検索させることによる等、複数の方法によって、達成することができることが理解されよう。
電極システムは、それぞれの信号発生器117およびセンサ118が実装されている、プリント回路基板(PCB)等の第1基板750を組み込んでいる。信号発生器117およびセンサ118の概略的な機能は、図示するコンポーネントによって表されている。実際には、当業者には理解されるように、好適な配置でより多くのコンポーネントが使用される可能性があり、図示するコンポーネントは、単に、信号発生器117およびセンサ118の機能を示すように意図されている。
信号発生器117およびセンサ118は、それぞれのケーブル761、762を介して導電性パッド763、765に結合されており、それらは、第2基板760に実装されていてもよく、それぞれ第1電極113および第2電極115を形成している。使用時、ケーブル761、762は、使用後に導電性パッドを容易に交換することができるように、クリップ等を有していてもよいことが理解されよう。
使用時に導電性パッド763、765が所定間隔離れて配置されることを確実にするように、導電性パッドを基板760の上に実装してもよく、それは、測定の一貫性を確実にするのに役立つことができる。別法として、導電性パッド763、765を別個の使い捨て導電性パッドとして、ケーブル761、762によって第1基板750に結合して提供することができる。他の好適な配置を使用してもよい。
使用時、検知電極115は環境と容量結合する可能性があり、それにより、検知増幅器A3の入力に実効入力静電容量CEIがもたらされる。実効静電容量により、検知増幅器の入力からの信号漏れが接地され、それにより、増幅器入力において得られる信号が低減する。
したがって、測定装置320が最初に構成される時、特に、インピーダンス測定値を確定するために電圧信号VSおよび電流信号ISを解析するアルゴリズムが生成される時、これらは、誘導EMFを考慮する較正係数を含むことができる。特に、構成プロセス中、測定装置320を用いて基準インピーダンスから測定を行うことができ、結果としての計算を用いて誘導EMFの影響が確定され、それにより、後の測定値からこれを減じることができる。
別のあり得る問題は、異なるリードL間の誘導結合とともに、被験体とベッドとの間の容量結合の問題である。これに関して、寄生容量により、高周波数電流が身体内の意図された電流路をバイパスし、測定誤差がもたらされる。これを考慮するために、一例では、各電極システムに対するリードLを、可能な限り物理的に分離することができ、かつ/または使用時にリード長を最短にする配置で提供することができる。ここで、これを達成する配置の一例について、図9を参照して説明する。
この配置において、4つの第1電極および4つの第2電極を四肢に配置することにより、種々の四肢および/または全身のインピーダンス測定を行うことができることが理解されよう。
これらの例の目的で、被験体Sは、腕1031、1032、脚1033、1034および胴部1035を有し、測定装置300(明確にするために図示せず)は、図9に示すものと同様の多チャネル構成で提供され、駆動電極および検知電極のそれぞれの対113A、115A;113B、115B;113C、115C;113D、115Dが被験体の手首および足首に提供される。図10Aおよび図10Bには、活性電極のみを示す。
この例の目的で、この場合もまた、装置は、図9に示すものと同様の多チャネル構成で提供され、駆動電極および検知電極のそれぞれの対113A、115A;113B、115B;113C、115C;113D、115Dが、被験体の手首および足首に設けられるものとする。この例では、測定プロセスが行われている時、ステップ1100において駆動電極構成を選択する。これには、たとえば、駆動電極113B、113Dを選択することが含まれ得るが、行われているインピーダンス測定のタイプに応じて、駆動電極のいかなる好適な組合せを用いてもよい。
VC=(VSA+VSC)/2 (1)
そして、以下に基づき、被験体を流れる電流を確定する。
ここで、
ISB=電極113Bに印加された正の電圧駆動信号VDBによってもたらされる検知電流であり、
ISD=電極113Dに印加された負の電圧駆動信号VDDによってもたらされる検知電流である。
Zupper=(VDB−VC)/I (3)
Zlower=(VDD−VC)/I (4)
ここで、
Zupper=上半身および駆動電極113Bインピーダンスであり、
Zlower=下半身および駆動電極113Dインピーダンスである。
VDD predicted=Iideal×Zlower (6)
ここで、
VDB predicted=電極113Bに対する予測理想電圧駆動信号であり、
VDD predicted=電極113Dに対する予測理想電圧駆動信号である。
当業者は、多数の変形および変更が明らかとなることを理解するであろう。当業者に明らかとなるこうした変形および変更のすべてが、上述した広く現れている本発明の趣旨および範囲内にあるようにみなされるべきである。
Claims (45)
- 被験体に対してインピーダンス測定を行う際に用いられる装置であって、
a)前記被験体の手足にそれぞれ接続された複数の第1電極を介して前記被験体に第1信号が印加されるようにし、
b)前記被験体の手足にそれぞれ接続された複数の第2電極を介して前記被験体において測定された第2信号を確定し、
c)前記第2信号を閾値と比較し、
d)前記比較の結果に応じて許容できない不平衡が存在するか否かを確定し、
e)許容できない不平衡が存在する場合、
i)前記不平衡に従って、変更第1信号を確定し、
ii)前記変更第1信号が前記被験体に印加されるようにし、それにより少なくとも1つのインピーダンス測定が行われ得るようにする
処理システムを有する装置。 - 前記第2信号が、それぞれの第2電極において検知される電圧を含み、前記処理システムが、
a)前記第2電極の各々において検知される電圧を確定し、
b)加算電圧を確定し、
c)前記加算電圧を用いて前記不平衡を確定する、請求項1に記載の装置。 - 前記加算電圧がコモンモード信号である、請求項2に記載の装置。
- 前記処理システムが、前記不平衡を低減するように前記変更第1信号を確定する、請求項1〜3のいずれか一項に記載の装置。
- 第1信号が少なくとも2つの第1電極を介して前記被験体に印加され、前記処理システムが、前記第1電極のうちの少なくとも1つに印加される少なくとも1つの第1信号の位相および大きさのうちの少なくとも一方を変更することにより、前記第1信号を変更する、請求項4に記載の装置。
- a)前記第1信号が、前記被験体の第1肢および第2肢に結合された第1電極を介して印加され、
b)前記第2信号が、前記被験体の第3肢および第4肢に結合された第2電極を介して検知され、前記第3肢および前記第4肢が前記第1肢および前記第2肢とは異なる、請求項1〜5のいずれか一項に記載の装置。 - 前記処理システムが、
a)前記第1信号が第1電極を介して印加されるようにし、
b)複数の第2電極の各々において検知される第2信号を確定し、
c)前記第2電極のうちの選択されたものにおいて検知される第2信号を選択し、
d)前記選択された第2信号を用いて不平衡が存在するかどうかを確定する、請求項1〜6のいずれか一項に記載の装置。 - 前記第1信号が、第1電極を用いて前記被験体に印加される電圧を含み、前記第2信号が、それぞれの第2電極において検知される電圧を含む、請求項1〜7のいずれか一項に記載の装置。
- 前記処理システムが、
a)前記第1信号を前記被験体に印加することによってもたらされる検知電流を確定し、
b)前記被験体にかかる検知電圧を確定し、
c)前記検知電流および前記検知電圧を用いてインピーダンスパラメータを確定する
ことにより、インピーダンス測定を行う、請求項1〜8のいずれか一項に記載の装置。 - 前記処理システムが、
a)前記第1信号を前記被験体に印加することによってもたらされる検知電流を確定し、
b)前記検知電流を閾値と比較し、
c)前記比較の結果に応じてインピーダンス測定プロセスを選択的に停止する、請求項1〜9のいずれか一項に記載の装置。 - 前記処理システムが、
a)前記第1信号を前記被験体に印加することによってもたらされる検知電流を確定し、
b)前記変更第1信号を確定するために前記検知電流を用いる、請求項1〜10のいずれか一項に記載の装置。 - 前記処理システムが、
a)第1信号が第1周波数で前記被験体に印加されるようにし、
b)前記被験体において測定される第2信号を確定し、
c)前記第2信号を閾値と比較し、
d)前記比較の結果に応じて許容できない不平衡が存在するか否かを確定し、
e)許容できない不平衡が存在しない場合、少なくとも前記第2信号を用いて少なくとも1つのインピーダンス値を確定し、
f)許容できない不平衡が存在する場合、
i)前記不平衡に従って変更第1信号を確定し、
ii)前記変更第1信号が前記被験体に印加されるようにし、
iii)前記被験体において測定される変更第2信号を確定し、
iv)前記変更第2信号に対してステップc)〜f)を繰り返し、
g)少なくとも1つの第2周波数に対してステップa)〜f)を繰り返す、請求項1〜11のいずれか一項に記載の装置。 - 前記処理システムが、
a)第1電極を介して、電圧駆動信号が前記被験体に印加されるようにし、
b)前記電圧駆動信号によってもたらされる検知電流信号を確定し、
c)それぞれの第2電極を介して測定される検知電圧を確定し、
d)前記検知電圧から身体中心電圧を確定し、
e)前記検知電流信号、前記電圧駆動信号および前記身体中心電圧を用いて、前記被験体に対する上部インピーダンスおよび下部インピーダンスを確定し、
f)前記上部インピーダンスおよび前記下部インピーダンスならびに理想電流信号の指示値を用いて、変更電圧駆動信号を確定する、請求項1〜12のいずれか一項に記載の装置。 - 前記電圧駆動信号が、それぞれの第1電極を介して前記被験体に印加される第1電圧駆動信号および第2電圧駆動信号を含み、前記第1電圧駆動信号が第1大きさおよび第1位相を有し、前記第2電圧駆動信号が第2大きさおよび第2位相を有し、前記処理システムが、
a)前記第1位相、
b)前記第1大きさ、
c)前記第2位相、および
d)前記第2大きさ
のうちの少なくとも1つを変更することにより、前記変更電圧駆動信号を確定する、請求項13に記載の装置。 - 前記処理システムが、
a)前記変更電圧駆動信号が前記被験体に印加されるようにし、
b)それぞれの第2電極を介して測定される検知電圧を確定し、
c)前記検知電圧を用いて許容できない不平衡が存在するか否かを確定し、
d)許容できない不平衡が存在する場合、
i)さらなる変更電圧駆動信号を確定し、
ii)あらゆる不平衡が許容可能となるまでステップ(a)〜(d)を繰り返す、請求項13または14に記載の装置。 - 前記処理システムが、複数の周波数でのインピーダンス測定を順に行うステップを含む、請求項1〜15のいずれか一項に記載の装置。
- 前記処理システムが、
a)第1周波数に対し、
i)許容可能な不平衡をもたらす変更第1信号を確定するステップと、
ii)前記変更第1信号を用いてインピーダンス測定が行われるようにするステップと、
b)第2周波数に対し、
i)前記被験体に第1信号が印加されるようにするステップであって、前記第1信号が、前記第1周波数に対して確定された前記変更第1信号に基づく、ステップと、
ii)許容できない不平衡が存在するか否かを確定するステップと、
を含む、請求項16に記載の装置。 - 前記処理システムが、
a)第1周波数に対し、
i)それぞれの第1電極を介して前記被験体に第1電圧駆動信号および第2電圧駆動信号が印加されるようにするステップと、
ii)許容可能な不平衡をもたらす変更第1電圧駆動信号および変更第2電圧駆動信号を確定するステップであって、前記第1電圧駆動信号が第1大きさおよび第1位相を有し、前記第2電圧駆動信号が第2大きさおよび第2位相を有する、ステップと、
b)第2周波数に対し、
i)前記被験体に対し第1電圧駆動信号および第2電圧駆動信号が印加されるようにするステップであって、前記第1電圧駆動信号が前記第1大きさおよび前記第1位相を有し、前記第2電圧駆動信号が前記第2大きさおよび前記第2位相を有する、ステップと、
ii)許容できない不平衡が存在するか否かを確定するステップと、
を含む、請求項17に記載の装置。 - 前記処理システムが、
a)制御信号を生成し、
b)前記制御信号を少なくとも1つの信号発生器に転送することにより、前記第1信号が前記被験体に印加されるようにし、
c)前記少なくとも1つの信号発生器から、前記被験体に印加される前記1つまたは複数の信号の指示値を受け取り、
d)少なくとも1つのセンサから前記被験体において測定される1つまたは複数の第2信号の指示値を受け取り、
e)前記指示値の少なくとも予備処理を行うことにより、インピーダンス値が確定され得るようにする、請求項1〜18のいずれか一項に記載の装置。 - 2つの第2電極の各々において測定される第2信号を増幅する差動増幅器を有する、請求項1〜19のいずれか一項に記載の装置。
- 前記差動増幅器が、
a)前記第2電極において測定される前記電圧を示す差動電圧、および
b)任意の不平衡を示すコモンモード信号
の少なくとも一方を生成する、請求項20に記載の装置。 - 第1電極を介して前記被験体に前記第1信号を印加する少なくとも1つの信号発生器を有する、請求項1〜21のいずれか一項に記載の装置。
- 各信号発生器が、
a)前記処理システムから1つまたは複数の制御信号を受け取り、
b)前記制御信号を増幅し、それにより前記第1信号を生成する、請求項22に記載の装置。 - 各信号発生器が、
a)前記第1信号を前記被験体に印加することによってもたらされる検知電流を確定し、
b)前記検知電流を前記処理システムに供給する、請求項22または23に記載の装置。 - 少なくとも2つの信号発生器を有し、各信号発生器が、それぞれの第1電極に接続される、請求項22〜24のいずれか一項に記載の装置。
- 第2電極を介して前記第2信号を測定する少なくとも1つのセンサを有する、請求項22〜25のいずれか一項に記載の装置。
- 少なくとも2つのセンサを有し、各センサがそれぞれの第2電極に接続される、請求項26に記載の装置。
- 複数の電極システムを有し、各電極システムが、
a)センサ、および
b)信号発生器
を有する、請求項1〜27のいずれか一項に記載の装置。 - 電極システムが、
a)信号発生器およびセンサが実装されている第1基板と、
b)少なくとも2つの導電性パッドが実装されている第2基板であって、前記導電性パッドが、使用時に前記信号発生器および前記センサを被験体に結合するための第1電極および第2電極を形成する、第2基板と、
を有する、請求項28に記載の装置。 - 前記電極システムが、前記第1電極と前記第2電極との間の容量結合をキャンセルするための容量キャンセル回路を有する、請求項28または29に記載の装置。
- 前記容量キャンセル回路が、信号発生器出力をセンサ入力に結合するための反転増幅器を有する、請求項30に記載の装置。
- 前記反転増幅器が、容量キャンセル信号を前記センサ入力に印加し、それにより前記第1電極と前記第2電極との間のいかなる実効静電容量もキャンセルする、請求項31に記載の装置。
- 反転増幅器出力が、
a)抵抗器、
b)コンデンサ、および
c)インダクタ
のうちの少なくとも1つを介して前記センサ入力に結合される、請求項31または32に記載の装置。 - 抵抗器およびコンデンサのうちの少なくとも一方が調整可能であり、それにより、前記センサ入力に印加される容量キャンセル信号を制御することができる、請求項33に記載の装置。
- 前記電極システムが、センサ入力における実効入力静電容量をキャンセルするための入力容量キャンセル回路を含む、請求項30〜34のいずれか一項に記載の装置。
- 前記電極システムが、センサ出力をセンサ入力に接続するフィードバックループを有する、請求項30〜35のいずれか一項に記載の装置。
- 前記フィードバックループが、
a)抵抗器、
b)コンデンサ、および
c)インダクタ
のうちの少なくとも1つを含む、請求項36に記載の装置。 - 抵抗器およびコンデンサのうちの少なくとも一方が調整可能であり、それにより、前記センサ出力から前記センサ入力への電流フローを制御することができる、請求項37に記載の装置。
- 前記フィードバックループが、前記センサ入力に入力容量キャンセル信号を印加し、それにより前記センサ入力におけるいかなる実効静電容量もキャンセルする、請求項37または38に記載の装置。
- a)複数の電極システムであって、各電極システムが信号発生器およびセンサを有する、電極システムと、
b)測定装置を前記電極システムに接続するための複数のリードであって、各リードが、
i)前記測定装置と前記信号発生器とを接続し、前記測定装置と前記センサとを接続するための少なくとも2つの接続と、
ii)前記少なくとも2つの接続の各々に対するシールドであって、電気的に接続され、かつ前記測定装置および前記電極システムの各々において基準電圧に接続される、シールドと、
を有するリードと、
を有する、請求項1〜39のいずれか一項に記載の装置。 - a)少なくとも2つの電極システムであって、各電極システムが、
i)第1信号を前記被験体に印加する信号発生器と、
ii)前記被験体における第2信号を検知するセンサと、
iii)前記信号発生器を前記被験体に結合する第1電極と、
iv)前記センサを前記被験体に結合する第2電極と、
を有する電極システムと、
b)インピーダンス測定を行うことができるように前記電極システムを制御する測定装置と、
c)前記測定装置を前記電極システムに接続するための少なくとも2つのリードと、
を有する、請求項40に記載の装置。 - 前記リードが、使用時に、
i)前記測定装置から異なる方向に延在し、それによりそれらの間の誘導結合を低減し、かつ/または
ii)リード長を最小限にする
ように配置される、請求項41に記載の装置。 - 前記処理システムをコンピュータシステムに結合するインタフェースを有し、前記処理システムが、
a)前記コンピュータシステムから受け取った命令に従って制御信号を生成し、
b)インピーダンス値を確定することができるように、測定されたインピーダンス値を示すデータを前記コンピュータシステムに提供する、請求項1〜42のいずれか一項に記載の装置。 - 前記第1信号が、少なくとも2つの第1電極を介して前記被験体に印加される2つの第1信号を含み、前記第2信号が、2つの第2電極において検知される2つの第2信号を含む、請求項1〜43のいずれか一項に記載の装置。
- 被験体に対してインピーダンス測定を行う際に用いられる方法であって、処理システムにおいて、
a)前記被験体の手足にそれぞれ接続された複数の第1電極を介して前記被験体に第1信号が印加されるようにするステップと、
b)前記被験体の手足にそれぞれ接続された複数の第2電極を介して前記被験体において測定された第2信号を確定するステップと、
c)前記第2信号を閾値と比較し、
d)前記比較の結果に応じて許容できない不平衡が存在するか否かを確定し、
e)不平衡が存在する場合、
i)前記不平衡に従って変更第1信号を確定し、
ii)前記変更第1信号が前記被験体に印加されるようにし、それにより少なくとも1つのインピーダンス測定を行うことができるようにするステップと、
を含む方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| AU2007906049A AU2007906049A0 (en) | 2007-11-05 | Impedance determination | |
| AU2007906049 | 2007-11-05 | ||
| PCT/AU2008/001521 WO2009059351A1 (en) | 2007-11-05 | 2008-10-15 | Impedance determination |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011502014A JP2011502014A (ja) | 2011-01-20 |
| JP2011502014A5 JP2011502014A5 (ja) | 2011-11-17 |
| JP5513396B2 true JP5513396B2 (ja) | 2014-06-04 |
Family
ID=40625275
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010531375A Active JP5513396B2 (ja) | 2007-11-05 | 2008-10-15 | インピーダンス確定方法及び装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (2) | US8836345B2 (ja) |
| EP (1) | EP2211714B1 (ja) |
| JP (1) | JP5513396B2 (ja) |
| AU (1) | AU2008324750B2 (ja) |
| CA (1) | CA2704061C (ja) |
| ES (1) | ES2615128T3 (ja) |
| WO (1) | WO2009059351A1 (ja) |
Families Citing this family (38)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AUPQ113799A0 (en) | 1999-06-22 | 1999-07-15 | University Of Queensland, The | A method and device for measuring lymphoedema |
| EP1898782B1 (en) | 2005-07-01 | 2016-04-06 | Impedimed Limited | Monitoring system |
| EP1898784B1 (en) | 2005-07-01 | 2016-05-18 | Impedimed Limited | Method and apparatus for performing impedance measurements |
| US9724012B2 (en) | 2005-10-11 | 2017-08-08 | Impedimed Limited | Hydration status monitoring |
| AU2007327573B2 (en) | 2006-11-30 | 2013-07-18 | Impedimed Limited | Measurement apparatus |
| WO2008128281A1 (en) | 2007-04-20 | 2008-10-30 | Impedimed Limited | Monitoring system and probe |
| AU2008207672B2 (en) | 2008-02-15 | 2013-10-31 | Impedimed Limited | Impedance Analysis |
| US9615766B2 (en) | 2008-11-28 | 2017-04-11 | Impedimed Limited | Impedance measurement process |
| JP5643829B2 (ja) | 2009-10-26 | 2014-12-17 | インぺディメッド リミテッドImpedimed Limited | インピーダンス測定の分析において用いるための方法及び装置 |
| AU2010321683B2 (en) | 2009-11-18 | 2014-06-26 | Impedimed Limited | Signal distribution for patient-electrode measurements |
| DE102009047247A1 (de) * | 2009-11-27 | 2011-09-08 | Hahn-Schickard-Gesellschaft für angewandte Forschung e.V. | Belastungszustandsbestimmer, Lastanordnung, Leistungsversorgungsschaltung und Verfahren zum Bestimmen eines Belastungszustandes einer elektrischen Leistungsquelle |
| JP4947173B2 (ja) * | 2010-03-16 | 2012-06-06 | 横河電機株式会社 | 交流インピーダンス測定装置 |
| KR101697342B1 (ko) * | 2010-05-04 | 2017-01-17 | 삼성전자 주식회사 | 터치 감지 시스템의 캘리브레이션 방법 및 장치와 이를 적용한 터치 감지 시스템 |
| EP2587997A4 (en) | 2010-07-02 | 2014-07-09 | Impedimed Ltd | FABRIC INDICATOR DETERMINATION |
| CA2863041A1 (en) | 2011-02-03 | 2012-08-09 | Impedimed Limited | Tissue mass indicator determination |
| JP5736036B2 (ja) * | 2011-04-05 | 2015-06-17 | 株式会社ブリヂストン | 車両の振動低減システム |
| AU2012351988B2 (en) | 2011-12-14 | 2017-05-04 | Impedimed Limited | Devices, systems and methods for determining the relative spatial change in subsurface resistivities across frequencies in tissue |
| WO2015046058A1 (ja) * | 2013-09-30 | 2015-04-02 | 学校法人北里研究所 | 長さ測定装置、長さ測定方法、プログラム、形状推定装置、及び体脂肪率測定装置 |
| ES2535280B1 (es) * | 2013-11-05 | 2016-03-15 | Universidad De Extremadura | Método, dispositivo y sistema de control de calidad alimentaria |
| US9717428B2 (en) * | 2014-02-07 | 2017-08-01 | Medtronic, Inc. | Devices and methods for sensing physiological signals during stimulation therapy |
| KR101648383B1 (ko) * | 2014-09-19 | 2016-08-24 | 한국과학기술연구원 | 교차전극 바이오센서 |
| KR20160035853A (ko) * | 2014-09-24 | 2016-04-01 | 삼성전자주식회사 | 체임피던스 측정 장치 및 이를 포함하는 체성분 분석 시스템 |
| WO2016073654A2 (en) * | 2014-11-04 | 2016-05-12 | Aliphcom | Strap band for a wearable device |
| US10004408B2 (en) | 2014-12-03 | 2018-06-26 | Rethink Medical, Inc. | Methods and systems for detecting physiology for monitoring cardiac health |
| US10555686B1 (en) | 2015-07-01 | 2020-02-11 | Richard C. Kimoto | Removing parasitic effects from body impedance measurements with wrist-worn and/or other devices |
| WO2017008118A1 (en) | 2015-07-16 | 2017-01-19 | Impedimed Limited | Fluid level determination |
| WO2017079794A1 (en) * | 2015-11-10 | 2017-05-18 | Impedimed Limited | Impedance measurement system |
| KR20170061752A (ko) * | 2015-11-26 | 2017-06-07 | 삼성전자주식회사 | 교정된 전류를 이용하여 생체 임피던스를 분석하는 전자 장치 |
| AU2017220382B2 (en) | 2016-02-16 | 2022-04-07 | Impedimed Limited | Heart failure indicator |
| AU2017220381B2 (en) | 2016-02-16 | 2022-01-20 | Impedimed Limited | Body state classification |
| US10085639B2 (en) * | 2016-03-24 | 2018-10-02 | Qualcomm Incorporated | Tracking contact quality to vital signs measurement sensors |
| US20190183387A1 (en) | 2016-08-26 | 2019-06-20 | Impedimed Limited | Subject data management system |
| EP3541312B1 (en) * | 2016-11-17 | 2024-04-03 | Apyx Medical Corporation | Electrosurgical apparatus with dynamic leakage current compensation and dynamic rf modulation |
| KR102696362B1 (ko) * | 2017-02-17 | 2024-08-20 | 삼성전자주식회사 | 전자 장치 및 전자 장치의 체성분 측정 방법 |
| US11478193B2 (en) | 2018-09-11 | 2022-10-25 | Apple Inc. | Contact detection for physiological sensor |
| US20220007956A1 (en) | 2018-09-27 | 2022-01-13 | Impedimed Limited | Evaluating impedance measurements |
| IT201900016184A1 (it) * | 2019-09-12 | 2021-03-12 | Innuvatech S R L | Bioimpedenziometro multifrequenza |
| CN112089418B (zh) * | 2020-09-25 | 2023-08-18 | 重庆大学 | 基于人体组织电导率变频调幅法的胸腔电阻抗检测方法 |
Family Cites Families (259)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR1344459A (fr) | 1962-10-18 | 1963-11-29 | Procédé et appareil pour l'étude électrique des organismes vivants | |
| US4314563A (en) | 1970-09-24 | 1982-02-09 | The United States Of America As Represented By The Administrator Of The Veterans Administration | Apparatus for measuring relative changes in blood volume in a portion of an animal body to detect a venous occlusion |
| US3871359A (en) | 1973-06-25 | 1975-03-18 | Interscience Technology Corp | Impedance measuring system |
| US3851641A (en) | 1973-11-29 | 1974-12-03 | J Toole | Method and apparatus for determining internal impedance of animal body part |
| US3996924A (en) | 1974-06-19 | 1976-12-14 | Wheeler H Brownell | Occlusive impedance phlebograph and method therefor |
| US4008712A (en) | 1975-11-14 | 1977-02-22 | J. M. Richards Laboratories | Method for monitoring body characteristics |
| US4034854A (en) | 1976-07-16 | 1977-07-12 | M I Systems, Inc. | Electrode package |
| US4184486A (en) | 1977-08-11 | 1980-01-22 | Radelkis Elektrokemiai Muszergyarto Szovetkezet | Diagnostic method and sensor device for detecting lesions in body tissues |
| IL53286A (en) | 1977-11-02 | 1980-01-31 | Yeda Res & Dev | Apparatus and method for detection of tumors in tissue |
| US4458694A (en) | 1977-11-02 | 1984-07-10 | Yeda Research & Development Co., Ltd. | Apparatus and method for detection of tumors in tissue |
| DE2912349A1 (de) | 1979-03-29 | 1980-10-16 | Liebisch Geb | Verfahren und vorrichtung zur bestimmung des feuchtigkeitszustandes der menschlichen haut |
| US4365634A (en) | 1979-12-06 | 1982-12-28 | C. R. Bard, Inc. | Medical electrode construction |
| US4353372A (en) | 1980-02-11 | 1982-10-12 | Bunker Ramo Corporation | Medical cable set and electrode therefor |
| FR2486386A1 (fr) | 1980-07-09 | 1982-01-15 | Argamakoff Alexis | Detecteur combine thermographique et impedancemetrique pour la detection precoce de tumeurs |
| US4407300A (en) | 1980-07-14 | 1983-10-04 | Davis Robert E | Potentiometric diagnosis of cancer in vivo |
| JPS5772627A (en) | 1980-10-21 | 1982-05-07 | Tokyo Shibaura Electric Co | Apparatus for detecting abnormal cell |
| US4942880A (en) | 1981-01-28 | 1990-07-24 | Ceske Vysoke Uceni Technicke V Praze | Method for non-invasive electric diagnosis and therapy in hemodialysis and general medicine |
| US4407288B1 (en) | 1981-02-18 | 2000-09-19 | Mieczyslaw Mirowski | Implantable heart stimulator and stimulation method |
| IL62861A (en) | 1981-05-13 | 1988-01-31 | Yeda Res & Dev | Method and apparatus for carrying out electric tomography |
| CA1196691A (en) | 1982-01-12 | 1985-11-12 | Bradley Fry | Reconstruction system and methods for impedance imaging |
| SE455043B (sv) | 1982-04-22 | 1988-06-20 | Karolinska Inst | Anordning for overvakning av menniskokroppens vetskebalans genom metning av kroppens impedans |
| US4617939A (en) | 1982-04-30 | 1986-10-21 | The University Of Sheffield | Tomography |
| US4450527A (en) | 1982-06-29 | 1984-05-22 | Bomed Medical Mfg. Ltd. | Noninvasive continuous cardiac output monitor |
| GB2126732B (en) | 1982-09-02 | 1986-01-15 | British Telecomm | Impedance measurement in 4-wire to 2-wire converters |
| GB2131558B (en) | 1982-11-05 | 1986-03-05 | Walter Farrer | Measuring potential difference |
| US4557271A (en) | 1983-05-11 | 1985-12-10 | Stoller Kenneth P | Method and apparatus for detecting body illness, dysfunction, disease and/or pathology |
| US4468832A (en) | 1983-06-24 | 1984-09-04 | Libman Broom Company | Refill sponge mop assembly |
| US4583549A (en) | 1984-05-30 | 1986-04-22 | Samir Manoli | ECG electrode pad |
| US4646754A (en) | 1985-02-19 | 1987-03-03 | Seale Joseph B | Non-invasive determination of mechanical characteristics in the body |
| US4688580A (en) | 1985-07-11 | 1987-08-25 | The Johns Hopkins University | Non-invasive electromagnetic technique for monitoring bone healing and bone fracture localization |
| US4686477A (en) | 1985-09-30 | 1987-08-11 | Mobil Oil Corporation | Multiple frequency electric excitation method and identifying complex lithologies of subsurface formations |
| US4763660A (en) | 1985-12-10 | 1988-08-16 | Cherne Industries, Inc. | Flexible and disposable electrode belt device |
| US4899758A (en) | 1986-01-31 | 1990-02-13 | Regents Of The University Of Minnesota | Method and apparatus for monitoring and diagnosing hypertension and congestive heart failure |
| EP0249823B1 (de) | 1986-06-16 | 1991-12-18 | Pacesetter AB | Vorrichtung zur Steuerung eines Herzschrittmachers mittels Impedanzmessung an Körpergeweben |
| WO1988007392A1 (en) | 1987-03-26 | 1988-10-06 | Intrinsic Ag | Signal control process, electric treatment device and electrode system |
| US4832608A (en) | 1987-05-22 | 1989-05-23 | Cherne Medical, Inc. | Electrode belt adapter |
| CN1024161C (zh) | 1987-09-05 | 1994-04-13 | 哈尔滨工业大学 | 检测和处理阻抗血流图的方法及装置 |
| US4911175A (en) | 1987-09-17 | 1990-03-27 | Diana Twyman | Method for measuring total body cell mass and total extracellular mass by bioelectrical resistance and reactance |
| US5078134A (en) | 1988-04-25 | 1992-01-07 | Lifecor, Inc. | Portable device for sensing cardiac function and automatically delivering electrical therapy |
| US4928690A (en) | 1988-04-25 | 1990-05-29 | Lifecor, Inc. | Portable device for sensing cardiac function and automatically delivering electrical therapy |
| US4895163A (en) | 1988-05-24 | 1990-01-23 | Bio Analogics, Inc. | System for body impedance data acquisition |
| US4951682A (en) | 1988-06-22 | 1990-08-28 | The Cleveland Clinic Foundation | Continuous cardiac output by impedance measurements in the heart |
| DE3821575A1 (de) | 1988-06-25 | 1989-12-28 | Philips Patentverwaltung | Anordnung zur naeherungsweisen bestimmung des ersatzschaltbildes eines elektrischen bzw. elektronischen bauelementes bei hohen frequenzen |
| US4952928A (en) | 1988-08-29 | 1990-08-28 | B. I. Incorporated | Adaptable electronic monitoring and identification system |
| US4955383A (en) | 1988-12-22 | 1990-09-11 | Biofield Corporation | Discriminant function analysis method and apparatus for disease diagnosis and screening |
| US5511553A (en) | 1989-02-15 | 1996-04-30 | Segalowitz; Jacob | Device-system and method for monitoring multiple physiological parameters (MMPP) continuously and simultaneously |
| US4981141A (en) * | 1989-02-15 | 1991-01-01 | Jacob Segalowitz | Wireless electrocardiographic monitoring system |
| US4905705A (en) | 1989-03-03 | 1990-03-06 | Research Triangle Institute | Impedance cardiometer |
| IL91193A (en) | 1989-08-02 | 1996-01-19 | Yeda Res & Dev | Tumor detection system |
| GB9013177D0 (en) | 1990-06-13 | 1990-08-01 | Brown Brian H | Real-time imaging, etc. |
| US5063937A (en) | 1990-09-12 | 1991-11-12 | Wright State University | Multiple frequency bio-impedance measurement system |
| US5199432A (en) | 1990-10-30 | 1993-04-06 | American Home Products Corporation | Fetal electrode product for use in monitoring fetal heart rate |
| DE4100568A1 (de) | 1991-01-11 | 1992-07-16 | Fehling Guido | Vorrichtung zur ueberwachung eines patienten auf abstossungsreaktionen eines implantierten organs |
| US5280429A (en) | 1991-04-30 | 1994-01-18 | Xitron Technologies | Method and apparatus for displaying multi-frequency bio-impedance |
| US5197479A (en) | 1991-05-13 | 1993-03-30 | Mortara Instrument | Automatic electrode channel impedance measurement system for egg monitor |
| US5588429A (en) | 1991-07-09 | 1996-12-31 | Rensselaer Polytechnic Institute | Process for producing optimal current patterns for electrical impedance tomography |
| US5544662A (en) | 1991-07-09 | 1996-08-13 | Rensselaer Polytechnic Institute | High-speed electric tomography |
| GB9116215D0 (en) | 1991-07-26 | 1991-09-11 | Nat Res Dev | Electrical impedance tomography |
| US5309917A (en) | 1991-09-12 | 1994-05-10 | Drexel University | System and method of impedance cardiography and heartbeat determination |
| GB2260416B (en) | 1991-10-10 | 1995-07-26 | Smiths Industries Plc | Resistance monitors |
| US5305192A (en) | 1991-11-01 | 1994-04-19 | Linear Technology Corporation | Switching regulator circuit using magnetic flux-sensing |
| US5415164A (en) | 1991-11-04 | 1995-05-16 | Biofield Corp. | Apparatus and method for screening and diagnosing trauma or disease in body tissues |
| US5282840A (en) | 1992-03-26 | 1994-02-01 | Medtronic, Inc. | Multiple frequency impedance measurement system |
| IL102300A (en) | 1992-06-24 | 1996-07-23 | N I Medical Ltd | Non-invasive system for determining of the main cardiorespiratory parameters of the human body |
| US5372141A (en) | 1992-07-01 | 1994-12-13 | Body Composition Analyzers, Inc. | Body composition analyzer |
| GB9222888D0 (en) | 1992-10-30 | 1992-12-16 | British Tech Group | Tomography |
| ZA948393B (en) | 1993-11-01 | 1995-06-26 | Polartechnics Ltd | Method and apparatus for tissue type recognition |
| JP3759606B2 (ja) | 1994-03-11 | 2006-03-29 | ビーティージー・インターナショナル・リミテッド | 電気インピーダンス・トモグラフィ |
| RU2112416C1 (ru) | 1994-05-10 | 1998-06-10 | Научно-исследовательский институт вычислительной техники | Способ контроля состояния тканей или органов в послеоперационном периоде и устройство для его реализации |
| AU1328595A (en) | 1994-06-20 | 1996-01-15 | Auckland Uniservices Limited | Brain damage monitor |
| US5704355A (en) | 1994-07-01 | 1998-01-06 | Bridges; Jack E. | Non-invasive system for breast cancer detection |
| US5505209A (en) | 1994-07-07 | 1996-04-09 | Reining International, Ltd. | Impedance cardiograph apparatus and method |
| US5810742A (en) | 1994-10-24 | 1998-09-22 | Transcan Research & Development Co., Ltd. | Tissue characterization based on impedance images and on impedance measurements |
| US6560480B1 (en) | 1994-10-24 | 2003-05-06 | Transscan Medical Ltd. | Localization of anomalies in tissue and guidance of invasive tools based on impedance imaging |
| JPH10512462A (ja) | 1994-10-24 | 1998-12-02 | トランススキャン・リサーチ・アンド・ディベロプメント・カンパニー・リミテッド | インピーダンス・イメージング・デバイス及びマルチ−エレメント・プローブ |
| US5562607A (en) | 1995-01-18 | 1996-10-08 | Alza Corporation | Electrotransport device having reusable controller power saver |
| EP0814700A1 (en) | 1995-03-14 | 1998-01-07 | Vnus Medical Technologies, Inc. | Venous pump efficiency test system and method |
| US5503157A (en) | 1995-03-17 | 1996-04-02 | Sramek; Bohumir | System for detection of electrical bioimpedance signals |
| DE19514698C1 (de) | 1995-04-13 | 1996-12-12 | Siemens Ag | Verfahren zum Durchführen einer Distanzmessung |
| US5557242A (en) | 1995-05-22 | 1996-09-17 | Motorola, Inc. | Method and apparatus for dielectric absorption compensation |
| US5919142A (en) | 1995-06-22 | 1999-07-06 | Btg International Limited | Electrical impedance tomography method and apparatus |
| JP3492038B2 (ja) | 1995-08-17 | 2004-02-03 | 積水化学工業株式会社 | 体脂肪測定装置 |
| NL1001282C2 (nl) | 1995-09-26 | 1997-03-28 | A J Van Liebergen Holding B V | Inrichting voor slagvolumebepaling van een menselijk hart. |
| US5813404A (en) | 1995-10-20 | 1998-09-29 | Aspect Medical Systems, Inc. | Electrode connector system |
| US5807272A (en) | 1995-10-31 | 1998-09-15 | Worcester Polytechnic Institute | Impedance spectroscopy system for ischemia monitoring and detection |
| GB9524968D0 (en) | 1995-12-06 | 1996-02-07 | Brown Brian H | Impedance pneumography |
| US6011992A (en) | 1996-05-09 | 2000-01-04 | Church Of Spirtual Technology | System for measuring and indicating changes in the resistance of a living body |
| FR2748928A1 (fr) | 1996-05-23 | 1997-11-28 | Jabourian Artin Pascal | Detecteur de troubles du rythme cardiaque |
| JPH10185A (ja) | 1996-06-17 | 1998-01-06 | Sekisui Chem Co Ltd | 体液異常診断装置 |
| JP3636825B2 (ja) * | 1996-06-25 | 2005-04-06 | 積水化学工業株式会社 | 体脂肪測定装置 |
| JP3636826B2 (ja) | 1996-07-01 | 2005-04-06 | 積水化学工業株式会社 | 生体電気インピーダンス測定装置 |
| JPH1014899A (ja) | 1996-07-05 | 1998-01-20 | Sekisui Chem Co Ltd | 身体組成推計装置及び身体組成推計方法 |
| US5749369A (en) | 1996-08-09 | 1998-05-12 | R.S. Medical Monitoring Ltd. | Method and device for stable impedance plethysmography |
| US5732710A (en) | 1996-08-09 | 1998-03-31 | R.S. Medical Monitoring Ltd. | Method and device for stable impedance plethysmography |
| US5759159A (en) | 1996-09-25 | 1998-06-02 | Ormco Corporation | Method and apparatus for apical detection with complex impedance measurement |
| CA2191285A1 (en) | 1996-11-26 | 1998-05-26 | Philip Maurice Church | Electrode arrangement for electrical impedance tomography system |
| RU2127075C1 (ru) | 1996-12-11 | 1999-03-10 | Корженевский Александр Владимирович | Способ получения томографического изображения тела и электроимпедансный томограф |
| US5876353A (en) | 1997-01-31 | 1999-03-02 | Medtronic, Inc. | Impedance monitor for discerning edema through evaluation of respiratory rate |
| ES2151774B1 (es) | 1997-03-06 | 2001-07-01 | Nte Sa | Aparato y procedimiento para la medida de volumenes y composicion corporal global y segmental en seres humanos. |
| ES2142219B1 (es) | 1997-03-06 | 2000-11-16 | Nte Sa | Procedimiento para determinar la composicion y calidad de sustancias de naturaleza carnica. |
| US6248083B1 (en) | 1997-03-25 | 2001-06-19 | Radi Medical Systems Ab | Device for pressure measurements |
| US5788643A (en) | 1997-04-22 | 1998-08-04 | Zymed Medical Instrumentation, Inc. | Process for monitoring patients with chronic congestive heart failure |
| FI972067A0 (fi) | 1997-05-14 | 1997-05-14 | Tiit Koeoebi | Apparaturer och foerfaranden foer utvaendig maetning av fysiologiska parametrar |
| JPH1170090A (ja) | 1997-08-29 | 1999-03-16 | Sekisui Chem Co Ltd | 生体電気インピーダンス測定装置 |
| US6018677A (en) | 1997-11-25 | 2000-01-25 | Tectrix Fitness Equipment, Inc. | Heart rate monitor and method |
| US6125297A (en) | 1998-02-06 | 2000-09-26 | The United States Of America As Represented By The United States National Aeronautics And Space Administration | Body fluids monitor |
| US6006125A (en) | 1998-02-12 | 1999-12-21 | Unilead International Inc. | Universal electrocardiogram sensor positioning device and method |
| US6173003B1 (en) | 1998-03-26 | 2001-01-09 | Visteon Global Technologies, Inc. | Dither noise source with notched frequency spectrum |
| US6354996B1 (en) | 1998-04-15 | 2002-03-12 | Braun Gmbh | Body composition analyzer with trend display |
| CA2231038C (en) | 1998-05-05 | 2005-12-13 | Leslie W. Organ | Electrical impedance method and apparatus for detecting and diagnosing diseases |
| US6122544A (en) | 1998-05-01 | 2000-09-19 | Organ; Leslie William | Electrical impedance method and apparatus for detecting and diagnosing diseases |
| US5994956A (en) * | 1998-05-06 | 1999-11-30 | Concorso; James A. | Inductive-capacitive feedback compensation for amplifier systems |
| BR9911866A (pt) | 1998-07-06 | 2002-01-29 | Aleksander Pastor | Aparelho para avaliação de variações de impedância de pele |
| JP3778330B2 (ja) | 1998-10-01 | 2006-05-24 | 株式会社デンソー | 健康管理機器 |
| US6845264B1 (en) | 1998-10-08 | 2005-01-18 | Victor Skladnev | Apparatus for recognizing tissue types |
| US6228022B1 (en) | 1998-10-28 | 2001-05-08 | Sdgi Holdings, Inc. | Methods and instruments for spinal surgery |
| JP4025438B2 (ja) | 1998-11-10 | 2007-12-19 | 積水化学工業株式会社 | 身体組成推計装置 |
| US6142949A (en) | 1998-11-24 | 2000-11-07 | Ortivus Ab | Lead protection and identification system |
| DE60018262T2 (de) | 1999-01-05 | 2006-01-12 | Kaiku Ltd. | Verfahren zur Erzeugung eines Impedanzspektrums, das für eine Probe einer Körpersubstanz charakteristisch ist |
| US6317628B1 (en) | 1999-01-25 | 2001-11-13 | Cardiac Pacemakers, Inc. | Cardiac rhythm management system with painless defribillation lead impedance measurement |
| US6233473B1 (en) | 1999-02-16 | 2001-05-15 | Hologic, Inc. | Determining body composition using fan beam dual-energy x-ray absorptiometry |
| US6497659B1 (en) | 1999-04-09 | 2002-12-24 | Spacelabs Medical, Inc. | System for identifying a cable transmitting a signal from a sensor to an electronic instrument |
| AUPQ113799A0 (en) | 1999-06-22 | 1999-07-15 | University Of Queensland, The | A method and device for measuring lymphoedema |
| KR100333166B1 (ko) | 1999-07-29 | 2002-04-18 | 차기철 | 생체 전기 임피던스법을 이용한 간편 인체 성분 측정 장치 및 방법 |
| JP3907353B2 (ja) | 1999-08-26 | 2007-04-18 | 株式会社タニタ | 生体インピーダンス測定装置 |
| JP2001070273A (ja) | 1999-09-03 | 2001-03-21 | Tanita Corp | 生体電気インピーダンス測定方法および身体組成測定装置 |
| JP2001187035A (ja) | 1999-12-28 | 2001-07-10 | Tanita Corp | 患部回復度判定装置 |
| JP4064028B2 (ja) | 2000-01-05 | 2008-03-19 | 株式会社タニタ | 身体疲労度判定装置 |
| US6292690B1 (en) | 2000-01-12 | 2001-09-18 | Measurement Specialities Inc. | Apparatus and method for measuring bioelectric impedance |
| JP2001198098A (ja) | 2000-01-21 | 2001-07-24 | Tanita Corp | むくみ測定方法及びむくみ測定装置 |
| AU2001231265A1 (en) | 2000-01-31 | 2001-08-07 | Justin D. Pearlman | Multivariate cardiac monitor |
| JP4454092B2 (ja) | 2000-02-15 | 2010-04-21 | 大和製衡株式会社 | 体内脂肪量測定装置 |
| GB0005247D0 (en) | 2000-03-03 | 2000-04-26 | Btg Int Ltd | Electrical impedance method for differentiating tissue types |
| US6714814B2 (en) | 2000-03-30 | 2004-03-30 | Tanita Corporation | Bioelectrical impedance measuring apparatus |
| JP4401529B2 (ja) | 2000-04-10 | 2010-01-20 | パナソニック株式会社 | 積層電圧計測装置 |
| WO2001078005A2 (en) | 2000-04-11 | 2001-10-18 | Cornell Research Foundation, Inc. | System and method for three-dimensional image rendering and analysis |
| US6441747B1 (en) | 2000-04-18 | 2002-08-27 | Motorola, Inc. | Wireless system protocol for telemetry monitoring |
| US6496721B1 (en) | 2000-04-28 | 2002-12-17 | Cardiac Pacemakers, Inc. | Automatic input impedance balancing for electrocardiogram (ECG) sensing applications |
| JP2001321352A (ja) | 2000-05-16 | 2001-11-20 | Sekisui Chem Co Ltd | 電気特性測定装置 |
| WO2001087154A1 (en) | 2000-05-18 | 2001-11-22 | Nuvasive, Inc. | Tissue discrimination and applications in medical procedures |
| WO2001089379A1 (en) | 2000-05-21 | 2001-11-29 | Transscan Medical Ltd. | Apparatus for impedance imaging coupled with another modality |
| IL163684A0 (en) | 2000-05-31 | 2005-12-18 | Given Imaging Ltd | Measurement of electrical characteristics of tissue |
| JP3792489B2 (ja) | 2000-06-30 | 2006-07-05 | 株式会社タニタ | 生体インピーダンス測定装置 |
| US6964140B2 (en) | 2000-07-03 | 2005-11-15 | Walker Steven H | Structural metal member for use in a roof truss or a floor joist |
| US6569160B1 (en) | 2000-07-07 | 2003-05-27 | Biosense, Inc. | System and method for detecting electrode-tissue contact |
| JP3699640B2 (ja) | 2000-08-01 | 2005-09-28 | 株式会社タニタ | 多周波生体インピーダンス測定による体水分量状態判定装置 |
| US7801598B2 (en) | 2000-08-14 | 2010-09-21 | Fresenius Medical Care Holdings, Inc. | Device and method for the determination of dry weight by continuous measurement of resistance and calculation of circumference in a body segment using segmental bioimpedance analysis |
| US7228170B2 (en) | 2000-08-14 | 2007-06-05 | Renal Research Institute, Llc | Device and method for monitoring and controlling physiologic parameters of a dialysis patient using segmental bioimpedance |
| AU2002218496A1 (en) | 2000-11-29 | 2002-06-11 | Art Haven 9 Co., Ltd. | Method and device for measuring body compositions |
| JP3947651B2 (ja) | 2000-12-28 | 2007-07-25 | 株式会社タニタ | 産後支援装置 |
| US6768921B2 (en) | 2000-12-28 | 2004-07-27 | Z-Tech (Canada) Inc. | Electrical impedance method and apparatus for detecting and diagnosing diseases |
| DE10100569A1 (de) | 2001-01-09 | 2002-07-11 | Koninkl Philips Electronics Nv | Treiberschaltung für Anzeigevorrichtung |
| US6841389B2 (en) | 2001-02-05 | 2005-01-11 | Glucosens, Inc. | Method of determining concentration of glucose in blood |
| ITBO20010110A1 (it) | 2001-03-01 | 2002-09-01 | Tre Esse Progettazione Biomedi | Procedimento e dispositivo impiantabile per la misura intrapolmonare di proprieta' fisiche del tessuto polmonare dipendenti dalla sua densit |
| US6631292B1 (en) | 2001-03-23 | 2003-10-07 | Rjl Systems, Inc. | Bio-electrical impedance analyzer |
| US6931605B2 (en) | 2001-03-28 | 2005-08-16 | Council Of Scientific & Industrial Research | Simulated circuit layout for low voltage, low paper and high performance type II current conveyor |
| US6511438B2 (en) | 2001-04-03 | 2003-01-28 | Osypka Medical Gmbh | Apparatus and method for determining an approximation of the stroke volume and the cardiac output of the heart |
| JP2002330938A (ja) | 2001-05-10 | 2002-11-19 | Inax Corp | 体脂肪計付便座装置 |
| KR20040047754A (ko) | 2001-06-13 | 2004-06-05 | 컴퓨메딕스 리미티드 | 의식 상태를 모니터링하기 위한 방법 및 장치 |
| AUPR571801A0 (en) | 2001-06-15 | 2001-07-12 | Polartechnics Limited | Apparatus for tissue type recognition using multiple measurement techniques |
| US6870109B1 (en) | 2001-06-29 | 2005-03-22 | Cadwell Industries, Inc. | System and device for reducing signal interference in patient monitoring systems |
| US7044911B2 (en) | 2001-06-29 | 2006-05-16 | Philometron, Inc. | Gateway platform for biological monitoring and delivery of therapeutic compounds |
| US6625487B2 (en) | 2001-07-17 | 2003-09-23 | Koninklijke Philips Electronics N.V. | Bioelectrical impedance ECG measurement and defibrillator implementing same |
| JP3792547B2 (ja) | 2001-07-19 | 2006-07-05 | 株式会社タニタ | 生体測定装置 |
| US6595927B2 (en) | 2001-07-23 | 2003-07-22 | Medtronic, Inc. | Method and system for diagnosing and administering therapy of pulmonary congestion |
| US7191000B2 (en) | 2001-07-31 | 2007-03-13 | Cardiac Pacemakers, Inc. | Cardiac rhythm management system for edema |
| US20050137480A1 (en) | 2001-10-01 | 2005-06-23 | Eckhard Alt | Remote control of implantable device through medical implant communication service band |
| US20050101875A1 (en) | 2001-10-04 | 2005-05-12 | Right Corporation | Non-invasive body composition monitor, system and method |
| US6623312B2 (en) | 2001-10-04 | 2003-09-23 | Unilead International | Precordial electrocardiogram electrode connector |
| JP3947379B2 (ja) | 2001-10-12 | 2007-07-18 | 積水化学工業株式会社 | 電気特性測定装置 |
| DE10151650A1 (de) | 2001-10-17 | 2003-05-08 | Univ Eberhard Karls | Elektrodenanordnung zur elektrischen Stimulation von biologischem Material sowie Multielektrodenarray zur Verwendung in einer solchen |
| DE60128838T2 (de) | 2001-12-12 | 2008-12-04 | Fresenius Medical Care Deutschland Gmbh | Bestimmung des hydratationszustandes eines patienten |
| JP2003230547A (ja) | 2002-02-12 | 2003-08-19 | Yamato Scale Co Ltd | 健康管理装置 |
| JP3943955B2 (ja) | 2002-02-25 | 2007-07-11 | 株式会社タニタ | 深部静脈血栓症判定装置 |
| JP3089347U (ja) | 2002-04-17 | 2002-10-25 | 船井電機株式会社 | 体脂肪測定機能付きテレビ用リモコン |
| US6887239B2 (en) | 2002-04-17 | 2005-05-03 | Sontra Medical Inc. | Preparation for transmission and reception of electrical signals |
| US6922586B2 (en) | 2002-05-20 | 2005-07-26 | Richard J. Davies | Method and system for detecting electrophysiological changes in pre-cancerous and cancerous tissue |
| US7630759B2 (en) | 2002-05-20 | 2009-12-08 | Epi-Sci, Llc | Method and system for detecting electrophysiological changes in pre-cancerous and cancerous breast tissue and epithelium |
| AU2003238754A1 (en) | 2002-06-19 | 2004-01-06 | Brainz Instruments Limited | Artefact removal during eeg recordings |
| WO2004006660A1 (en) | 2002-06-26 | 2004-01-22 | Capamo Aps | Apparatus for the registration of weight |
| US7096061B2 (en) | 2002-07-03 | 2006-08-22 | Tel-Aviv University Future Technology Development L.P. | Apparatus for monitoring CHF patients using bio-impedance technique |
| DE10232018B4 (de) | 2002-07-16 | 2008-05-21 | Dräger Medical AG & Co. KG | Verfahren und eine Vorrichtung zur Korrelationsbestimmung von Signalen eines elektrischen Impedanztomographen |
| JP3806734B2 (ja) | 2002-07-26 | 2006-08-09 | 独立行政法人農業・食品産業技術総合研究機構 | プログラマブル計測汎用モジュール並びにそれらを用いた計測システム |
| US20040019292A1 (en) | 2002-07-29 | 2004-01-29 | Drinan Darrel Dean | Method and apparatus for bioelectric impedance based identification of subjects |
| US7085598B2 (en) | 2002-08-23 | 2006-08-01 | Nihon Kohden Corporation | Biological electrode and connector for the same |
| WO2004026136A1 (en) | 2002-09-17 | 2004-04-01 | Beth Israel Deaconess Medical Center, Inc. | Radio frequency impedance mapping |
| US7783345B2 (en) | 2002-10-07 | 2010-08-24 | Cnsystems Medizintechnik Gmbh | Impedance-based measuring method for hemodynamic parameters |
| AU2002951925A0 (en) | 2002-10-09 | 2002-10-24 | Queensland University Of Technology | An Impedence Cardiography Device |
| US20060122523A1 (en) | 2002-10-17 | 2006-06-08 | Giorgio Bonmassar | Arrangement and method for detecting abnormalities and inconsistencies in a body |
| US20040092801A1 (en) | 2002-11-13 | 2004-05-13 | Budimir Drakulic | System for, and method of, acquiring physiological signals of a patient |
| WO2004047635A1 (en) | 2002-11-22 | 2004-06-10 | Impedimed Pty Ltd | Multifrequency bioimpedance determination |
| US7313434B2 (en) | 2002-11-25 | 2007-12-25 | Regents Of The University Of Minnesota | Impedance monitoring for detecting pulmonary edema and thoracic congestion |
| EP1571996A1 (en) | 2002-11-27 | 2005-09-14 | Z-Tech (Canada) Inc. | Bioimpedance measurement using controller-switched current injection and multiplexer selected electrode connection |
| GB0228375D0 (en) | 2002-12-05 | 2003-01-08 | Innovation And Entpr Off Of | Wound mapping |
| EE04767B1 (et) | 2002-12-06 | 2007-02-15 | Tallinna Tehnika�likool | Meetod ja seade elektrilise bioimpedantsi mõõtmiseks |
| US20040167423A1 (en) | 2002-12-20 | 2004-08-26 | Luana Pillon | RXc graph and RXc Z-score graph methods |
| DE60309559T2 (de) | 2003-01-09 | 2007-08-23 | Ge Healthcare Finland Oy | Abschirmungsanordnung für EKG Anschlussdrähte |
| JP3907595B2 (ja) | 2003-02-25 | 2007-04-18 | 株式会社タニタ | 静脈伸展性評価指標計測装置 |
| US20060264775A1 (en) | 2003-03-14 | 2006-11-23 | Mills Gary N | Methods of and apparatus for determining fluid volume presence in mammalian tissue |
| EP1517140A3 (en) | 2003-03-19 | 2005-04-06 | TF Instruments GmbH | Method and device for diagnostic investigation of biological samples |
| US7945318B2 (en) | 2003-03-20 | 2011-05-17 | Smithmarks, Inc. | Peripheral impedance plethysmography electrode and system with detection of electrode spacing |
| US8045770B2 (en) | 2003-03-24 | 2011-10-25 | Cornell Research Foundation, Inc. | System and method for three-dimensional image rendering and analysis |
| JP2004329412A (ja) * | 2003-05-02 | 2004-11-25 | Tanita Corp | 体組成測定装置 |
| JP2006525099A (ja) | 2003-05-02 | 2006-11-09 | ザ ジョンズ ホプキンス ユニバーシティ | 子宮頚部組織のバイオインピーダンス測定のためのデバイス、システムおよび方法、並びにヒト子宮頚部の診断および処置のための方法 |
| EP1648297A4 (en) | 2003-07-31 | 2009-06-10 | Dst Delta Segments Technology | NON-INVASIVE MULTI-CHANNEL MONITORING OF HEMODYNAMIC PARAMETERS |
| JP5449647B2 (ja) | 2003-08-20 | 2014-03-19 | フィロメトロン,インコーポレイティド | ハイドレーションモニタリング |
| CN101926647B (zh) | 2003-09-12 | 2013-06-05 | 肾脏研究所有限公司 | 生物阻抗方法和仪器 |
| JP4600916B2 (ja) | 2003-11-07 | 2010-12-22 | 株式会社タニタ | シールドケーブル及びシールドケーブルを用いた生体電気インピーダンス値又は生体組成情報の取得装置 |
| WO2005051194A1 (en) | 2003-11-26 | 2005-06-09 | Biospace Co. Ltd | Apparatus and method for measuring segmental body fat using bioelectrical impedance |
| US20050113704A1 (en) | 2003-11-26 | 2005-05-26 | Lawson Corey J. | Patient monitoring system that incorporates memory into patient parameter cables |
| US7184821B2 (en) | 2003-12-03 | 2007-02-27 | Regents Of The University Of Minnesota | Monitoring thoracic fluid changes |
| KR20050072990A (ko) | 2004-01-08 | 2005-07-13 | 황인덕 | 전기 임피던스 측정 장치 |
| CA2555807A1 (en) | 2004-02-12 | 2005-08-25 | Biopeak Corporation | Non-invasive method and apparatus for determining a physiological parameter |
| JP2005253840A (ja) | 2004-03-15 | 2005-09-22 | Tanita Corp | 肌状態推定装置 |
| US20050261743A1 (en) | 2004-05-19 | 2005-11-24 | Kroll Mark W | System and method for automated fluid monitoring |
| WO2005122888A1 (en) | 2004-06-18 | 2005-12-29 | The University Of Queensland | Oedema detection |
| US8068906B2 (en) * | 2004-06-21 | 2011-11-29 | Aorora Technologies Pty Ltd | Cardiac monitoring system |
| EP1768552A4 (en) | 2004-06-21 | 2009-06-03 | Aorora Technologies Pty Ltd | HEART CONTROL SYSTEM |
| JP4578187B2 (ja) | 2004-08-31 | 2010-11-10 | 株式会社タニタ | 子供用判定機能付き体組成計 |
| US9820658B2 (en) | 2006-06-30 | 2017-11-21 | Bao Q. Tran | Systems and methods for providing interoperability among healthcare devices |
| US20060085048A1 (en) | 2004-10-20 | 2006-04-20 | Nervonix, Inc. | Algorithms for an active electrode, bioimpedance-based tissue discrimination system |
| WO2006044868A1 (en) | 2004-10-20 | 2006-04-27 | Nervonix, Inc. | An active electrode, bio-impedance based, tissue discrimination system and methods and use |
| US7660617B2 (en) | 2004-11-13 | 2010-02-09 | The Boeing Company | Electrical impedance tomography using a virtual short measurement technique |
| US20060111652A1 (en) | 2004-11-22 | 2006-05-25 | Mcleod Kenneth J | Method for enhancing blood and lymph flow in the extremities |
| US20080188757A1 (en) | 2005-02-21 | 2008-08-07 | Ave Eugenio Garza Sada #2501 Sur, Col. Tecnologic | Optoelectronic Device For The Detection Of Uterine Cancer, Comprising A Self-Positioning Attachment |
| US7242169B2 (en) | 2005-03-01 | 2007-07-10 | Apple Inc. | Method and apparatus for voltage compensation for parasitic impedance |
| JP4645266B2 (ja) | 2005-03-30 | 2011-03-09 | オムロンヘルスケア株式会社 | 体脂肪測定装置 |
| US20060224079A1 (en) | 2005-03-31 | 2006-10-05 | Washchuk Bohdan O | Edema monitoring system and method utilizing an implantable medical device |
| GB0511289D0 (en) | 2005-06-03 | 2005-07-13 | Sheffield Teaching Hospitals | Method and probe for measuring the impedance of human or animal body tissue |
| GB2426824A (en) | 2005-06-03 | 2006-12-06 | Sheffield Teaching Hospitals | Body tissue impedance measuring probe with wireless transmitter |
| GB0511323D0 (en) | 2005-06-03 | 2005-07-13 | Sheffield Teaching Hospitals | Apparatus for measuring tissue sample electrical impedance |
| CA2613524C (en) | 2005-07-01 | 2015-12-29 | Impedance Cardiology Systems Inc. | Pulmonary monitoring system |
| EP1898782B1 (en) | 2005-07-01 | 2016-04-06 | Impedimed Limited | Monitoring system |
| DE102005031752B4 (de) * | 2005-07-07 | 2017-11-02 | Drägerwerk AG & Co. KGaA | Elektroimpedanztomographie-Gerät mit Gleichtaktsignalunterdrückung |
| EP1909642A1 (en) | 2005-07-20 | 2008-04-16 | Impedance Cardiology Systems Inc. | Index determination |
| EP1754441B1 (en) | 2005-08-17 | 2008-01-09 | Osypka Medical GmbH | Method and apparatus for digital demodulation in the measurement of electrical bioimpedance or bioadmittance |
| US9724012B2 (en) | 2005-10-11 | 2017-08-08 | Impedimed Limited | Hydration status monitoring |
| US7733224B2 (en) | 2006-06-30 | 2010-06-08 | Bao Tran | Mesh network personal emergency response appliance |
| CN100423688C (zh) | 2005-10-19 | 2008-10-08 | 深圳迈瑞生物医疗电子股份有限公司 | 抑制工频共模干扰的方法及装置 |
| US8108047B2 (en) | 2005-11-08 | 2012-01-31 | Newlife Sciences Llc | Device and method for the treatment of pain with electrical energy |
| WO2007105996A1 (en) | 2006-03-15 | 2007-09-20 | St. Jude Medical Ab | Method and implantable medical device for assessing a degree of pulmonary edema of a patient. |
| JP5069878B2 (ja) | 2006-07-19 | 2012-11-07 | フクダ電子株式会社 | 静脈検査装置 |
| US20080091114A1 (en) | 2006-10-11 | 2008-04-17 | Pacesetter, Inc. | Techniques for Correlating Thoracic Impedance with Physiological Status |
| CA2668326C (en) | 2006-11-03 | 2014-02-18 | T.F.H. Publications, Inc. | Nutritional supplement |
| AU2007327573B2 (en) | 2006-11-30 | 2013-07-18 | Impedimed Limited | Measurement apparatus |
| US20090318778A1 (en) | 2007-04-30 | 2009-12-24 | Clifford Dacso | Non-invasive monitoring of physiological measurements in a distributed health care environment |
| WO2008133897A1 (en) | 2007-04-30 | 2008-11-06 | Dacso Clifford C | Non-invasive monitoring of physiological measurements in a distributed health care environment |
| ES2555964T3 (es) | 2007-05-14 | 2016-01-11 | Impedimed Limited | Indicador |
| CA2697381A1 (en) | 2007-08-23 | 2009-02-26 | Bioness, Inc. | System for transmitting electrical current to a bodily tissue |
| US20090076350A1 (en) | 2007-09-14 | 2009-03-19 | Corventis, Inc. | Data Collection in a Multi-Sensor Patient Monitor |
| WO2009036316A1 (en) | 2007-09-14 | 2009-03-19 | Corventis, Inc. | Energy management, tracking and security for adherent patient monitor |
| EP2200499B1 (en) | 2007-09-14 | 2019-05-01 | Medtronic Monitoring, Inc. | Multi-sensor patient monitor to detect impending cardiac decompensation |
| US8116841B2 (en) | 2007-09-14 | 2012-02-14 | Corventis, Inc. | Adherent device with multiple physiological sensors |
| US9204449B2 (en) | 2008-01-22 | 2015-12-01 | Alcatel Lucent | Method of assigning an idle state access terminal to a carrier in a multiple carrier wireless communication system based on load on control channel resources |
| AU2008207672B2 (en) | 2008-02-15 | 2013-10-31 | Impedimed Limited | Impedance Analysis |
| AU2009214826B2 (en) | 2008-02-15 | 2014-12-18 | Impedimed Limited | Analysing impedance measurements |
| WO2011022068A1 (en) | 2009-08-21 | 2011-02-24 | Rutkove Seward B | A hand-held device for electrical impedance myography |
| JP5643829B2 (ja) | 2009-10-26 | 2014-12-17 | インぺディメッド リミテッドImpedimed Limited | インピーダンス測定の分析において用いるための方法及び装置 |
| CA2782953A1 (en) | 2009-12-21 | 2011-06-30 | Impedimed Limited | Analysing impedance measurements |
-
2008
- 2008-10-15 US US12/741,368 patent/US8836345B2/en active Active
- 2008-10-15 JP JP2010531375A patent/JP5513396B2/ja active Active
- 2008-10-15 EP EP08800155.7A patent/EP2211714B1/en active Active
- 2008-10-15 AU AU2008324750A patent/AU2008324750B2/en active Active
- 2008-10-15 CA CA2704061A patent/CA2704061C/en not_active Expired - Fee Related
- 2008-10-15 WO PCT/AU2008/001521 patent/WO2009059351A1/en active Application Filing
- 2008-10-15 ES ES08800155.7T patent/ES2615128T3/es active Active
-
2014
- 2014-09-12 US US14/484,796 patent/US20150002177A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| EP2211714A1 (en) | 2010-08-04 |
| AU2008324750B2 (en) | 2014-01-16 |
| US8836345B2 (en) | 2014-09-16 |
| JP2011502014A (ja) | 2011-01-20 |
| EP2211714B1 (en) | 2016-11-23 |
| AU2008324750A1 (en) | 2009-05-14 |
| CA2704061A1 (en) | 2009-05-14 |
| EP2211714A4 (en) | 2015-04-01 |
| US20150002177A1 (en) | 2015-01-01 |
| CA2704061C (en) | 2017-06-20 |
| WO2009059351A1 (en) | 2009-05-14 |
| US20110025348A1 (en) | 2011-02-03 |
| ES2615128T3 (es) | 2017-06-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5513396B2 (ja) | インピーダンス確定方法及び装置 | |
| JP5400618B2 (ja) | モニタリングシステム | |
| JP5657553B2 (ja) | インピーダンス測定を実施する際に使用される装置、浮腫の有無または程度を診断する際に使用される装置、及び身体組成分析において使用される装置 | |
| JP5372768B2 (ja) | 測定装置 | |
| JP2010515492A5 (ja) | ||
| JP5755234B2 (ja) | 患者−電極間測定のための装置およびシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110930 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110930 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20120120 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130903 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131031 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140304 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140327 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5513396 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |