JP4055828B2 - 密閉型圧縮機 - Google Patents
密閉型圧縮機 Download PDFInfo
- Publication number
- JP4055828B2 JP4055828B2 JP53875297A JP53875297A JP4055828B2 JP 4055828 B2 JP4055828 B2 JP 4055828B2 JP 53875297 A JP53875297 A JP 53875297A JP 53875297 A JP53875297 A JP 53875297A JP 4055828 B2 JP4055828 B2 JP 4055828B2
- Authority
- JP
- Japan
- Prior art keywords
- suction
- hermetic compressor
- refrigerant gas
- line segment
- suction pipe
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 239000003507 refrigerant Substances 0.000 claims description 431
- 239000010687 lubricating oil Substances 0.000 claims description 18
- 230000005484 gravity Effects 0.000 claims description 13
- 230000000694 effects Effects 0.000 description 118
- 238000005057 refrigeration Methods 0.000 description 114
- 230000006835 compression Effects 0.000 description 47
- 238000007906 compression Methods 0.000 description 47
- 230000007246 mechanism Effects 0.000 description 46
- 230000008859 change Effects 0.000 description 41
- 230000010349 pulsation Effects 0.000 description 33
- 230000006870 function Effects 0.000 description 25
- 238000010586 diagram Methods 0.000 description 18
- 230000007423 decrease Effects 0.000 description 17
- 239000000463 material Substances 0.000 description 17
- 229910001285 shape-memory alloy Inorganic materials 0.000 description 17
- 238000004891 communication Methods 0.000 description 16
- 230000006872 improvement Effects 0.000 description 16
- 230000002238 attenuated effect Effects 0.000 description 10
- 230000004913 activation Effects 0.000 description 9
- 230000020169 heat generation Effects 0.000 description 6
- 230000006399 behavior Effects 0.000 description 5
- 230000008878 coupling Effects 0.000 description 5
- 238000010168 coupling process Methods 0.000 description 5
- 238000005859 coupling reaction Methods 0.000 description 5
- 239000003921 oil Substances 0.000 description 5
- 230000009467 reduction Effects 0.000 description 5
- 230000000903 blocking effect Effects 0.000 description 4
- 238000001816 cooling Methods 0.000 description 4
- 239000004809 Teflon Substances 0.000 description 3
- 229920006362 Teflon® Polymers 0.000 description 3
- 238000012937 correction Methods 0.000 description 3
- 230000003247 decreasing effect Effects 0.000 description 3
- 238000002474 experimental method Methods 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 239000002826 coolant Substances 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- LVGUZGTVOIAKKC-UHFFFAOYSA-N 1,1,1,2-tetrafluoroethane Chemical group FCC(F)(F)F LVGUZGTVOIAKKC-UHFFFAOYSA-N 0.000 description 1
- 240000007594 Oryza sativa Species 0.000 description 1
- 235000007164 Oryza sativa Nutrition 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 235000009566 rice Nutrition 0.000 description 1
- 229920006395 saturated elastomer Polymers 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 230000001743 silencing effect Effects 0.000 description 1
Images




























































Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B39/00—Component parts, details, or accessories, of pumps or pumping systems specially adapted for elastic fluids, not otherwise provided for in, or of interest apart from, groups F04B25/00 - F04B37/00
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B39/00—Component parts, details, or accessories, of pumps or pumping systems specially adapted for elastic fluids, not otherwise provided for in, or of interest apart from, groups F04B25/00 - F04B37/00
- F04B39/0027—Pulsation and noise damping means
- F04B39/0055—Pulsation and noise damping means with a special shape of fluid passage, e.g. bends, throttles, diameter changes, pipes
- F04B39/0072—Pulsation and noise damping means with a special shape of fluid passage, e.g. bends, throttles, diameter changes, pipes characterised by assembly or mounting
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B39/00—Component parts, details, or accessories, of pumps or pumping systems specially adapted for elastic fluids, not otherwise provided for in, or of interest apart from, groups F04B25/00 - F04B37/00
- F04B39/0027—Pulsation and noise damping means
- F04B39/0055—Pulsation and noise damping means with a special shape of fluid passage, e.g. bends, throttles, diameter changes, pipes
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B39/00—Component parts, details, or accessories, of pumps or pumping systems specially adapted for elastic fluids, not otherwise provided for in, or of interest apart from, groups F04B25/00 - F04B37/00
- F04B39/10—Adaptations or arrangements of distribution members
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B39/00—Component parts, details, or accessories, of pumps or pumping systems specially adapted for elastic fluids, not otherwise provided for in, or of interest apart from, groups F04B25/00 - F04B37/00
- F04B39/12—Casings; Cylinders; Cylinder heads; Fluid connections
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S181/00—Acoustics
- Y10S181/403—Refrigerator compresssor muffler
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Compressor (AREA)
Description
本発明は、冷凍冷蔵装置等に使用される密閉型圧縮機に関するものである。
背景技術
冷凍冷蔵装置等に使用される密閉型圧縮機は冷凍能力の向上とともに、低騒音化が強く望まれている。
冷凍能力向上を目的とした従来技術としては、例えば、特開昭57−122192号公報や特開平6−50262号公報に開示された密閉型圧縮機がある。これらの従来技術では、冷媒ガスの吸入が完了する時点でのシリンダー内の圧力を冷凍サイクルの低圧側圧力よりも高め、それにより、シリンダー内に吸い込まれる冷媒ガスの密度を高め、さらに冷凍能力向上を図っている。
また、低騒音化を目的とした従来技術としては、例えば、特開平6−74154号公報に開示された密閉型圧縮機がある。この密閉型圧縮機では、圧縮動作行程における吸入時に発生する密閉容器内の共鳴音の発生を防止するため、冷媒ガスをシリンダー内へ吸入する吸入部を改良している。
以下、図面を参照しながら、低騒音化を図った従来の密閉型圧縮機の一例について説明する。
図67は従来の密閉型圧縮機を示す縦断面図であり、図68は図67の従来の密閉型圧縮機を示す平面断面図である。
図67及び図68において、密閉型圧縮機1は、下シェル3と上シェル4から構成された密閉容器2を有している。垂直に配置された密閉容器2内の電動圧縮要素5は、上方部に機械部6、下方部にモーター部7が配置されるように、コイルばね8により密閉容器2に弾性支持されている。
機械部6は、ブロック9と一体に設けられたシリンダー10、ピストン11、クランクシャフト12、コンロッド13、ベアリング14、シリンダーヘッド80等により構成されている。モーター部7は、クランクシャフト12が焼ばめ固定されたローター15及びステーター16により構成されている。ステーター16はブロック9にねじ止め固定されている。潤滑油17は密閉容器2の下部に貯溜されている。
図68における符号aは、密閉容器2の水平断面にて断面積が略最大となる平面上の重心を通る密閉容器2の内壁面間の最小距離を示している。言い換えると、密閉容器2の内壁面間において、距離aはピストン11の往復方向並びにクランクシャフト12の軸方向に対して直角方向の最大距離である。符号bは前記距離aの線分と同一水平面上で略直角となる密閉容器2の内壁面間の距離である。すなわち、距離bは密閉容器2の内壁面間のピストン11の往復方向の最大距離である。符号cは密閉容器2の内壁上面から潤滑油17の油面までのクランクシャフト12の軸方向の最大距離である。
密閉容器2内の冷媒ガスを吸入する吸入パイプ18は、その一端がブロック9に固定されており、他端が距離aで示される線の中心を通り、かつその線と直交する平面上の位置に配置されている。この他端は、開口端部18aとして密閉容器2内空間に配置され、シリンダー10内の空間と連通している。
以上のように構成された従来の密閉型圧縮機について、以下その動作について説明する。
冷凍冷蔵装置等のシステムから循環してきた冷媒ガスは、一旦密閉容器2内空間に開放され、ブロック9に固定された吸入パイプ18を介してシリンダー10内に吸入され、ピストン11により圧縮される。その際、冷媒ガスはクランクシャフト12の1/2回転でシリンダー10内に吸入され、後の1/2回転で圧縮される。
このように冷媒ガスは連続的にシリンダー10内に吸入されないため、吸入パイプ18に冷媒ガスの圧力脈動が生じる。従って、その圧力脈動が密閉容器2内の空間を加振し、ピストン11の往復方向、ピストン11の往復方向を含む水平面における当該往復方向と直角の方向、及びクランクシャフト12の軸方向に共鳴モードが発生する。
しかし、吸入パイプ18の密閉容器2内空間の開口端部18aを、距離aにより示される線の中心を通り、かつその線と直交する平面上、すなわちピストン11の往復方向を含む水平面における当該往復方向と直角の方向に発生した共鳴モードの節部の位置を含む平面上に配置している。
従って、図67と図68に示した従来の密閉型圧縮機においては、圧力脈動が共鳴モードの節部を加振することになる。このため、従来の密閉型圧縮機には、共鳴モードが励起されず、共鳴音の発生が防止され、共鳴音による騒音が抑制されていた。
また、問題となる共鳴周波数の共鳴モードが密閉容器2のピストン11の往復方向にある場合には、吸入パイプ18の密閉容器2内空間の開口端部18aを、下記の位置に配置する。図68において、開口端部18aは、水平断面の重心を通る距離が最小となる距離aにより示される線分Aと同一水平面上で線分Aと略直角となる密閉容器2内壁面間の距離bにて示される線分Bにおいて、その線分Bの中心を通り、かつ線分Bと直交する平面上に配置される。これにより、圧力脈動は共鳴モードの節部にて加振することとなる。このため、共鳴モードは励起されず、共鳴音の発生を抑えることができ、共鳴音による密閉型圧縮機の騒音は抑制される。
また、問題となる共鳴周波数の共鳴モードが密閉容器2のクランクシャフト12の軸方向にある場合には、吸入パイプ18の密閉容器2内空間の開口端部18aを下記の位置に配置する。すなわち、開口端部は、密閉容器2の鉛直方向の内壁上面と潤滑油17の油面との間の最大距離となる距離c(図67)にて示す線分Cに対し、その線分Cの中心を通りかつ線分Cに直交する平面上に配置される。これにより、圧力脈動は共鳴モードの節部にて加振することとなる。このため、共鳴モードは励起されず、共鳴音の発生を抑えることができ、共鳴音による密閉型圧縮機の騒音は抑制される。
次に、冷凍能力向上を図った従来の密閉型圧縮機の一例について図面を参照しながら説明する。
図69は冷凍能力向上を図った従来の密閉型圧縮機を示す縦断面図である。図70は図69に示した従来の密閉型圧縮機の平面断面図である。図71は図69のA−A線における要部断面図である。図72は冷媒ガス挙動の説明図である。
図69、図70、図71及び図72において、バルブプレート19は、吸入孔19aを有し、シリンダー10の端面に配設されている。吸入孔19a(図70及び図71)は吸入パイプ21とシリンダー10内とを連通している。図71に示すサクションリード20は、バルブプレート19の吸入孔19aの開閉を行う。吸入パイプ21は、その一端21aが密閉容器2内の空間に開口しており、他端21bがバルブプレート19に直結されている。
一方、特開昭57−122192号公報に示す、従来の冷凍能力向上を図る回転式圧縮機において、吸入パイプ21の長さL(m)は、吸入行程周期をT(sec)とし、吸入される冷媒ガスの吸入状態のときの音速をa(m/sec)としたとき、
(T×a/4−0.2)±0.1=L
となる。
次に、上記のように構成された従来の密閉型圧縮機について、その動作を説明する。
図72において冷媒ガスは、吸入行程の開始(図72の(a)の時点)では、バルブプレート19の吸入孔19aは塞がれている。このため、冷媒ガスの流れは停止している。
次に、ピストン11が右側に移動し、シリンダー10内の容積が急激に増加する。従って、シリンダー10内の空間と密閉容器2内の空間とに圧力差が発生し、冷媒ガスは吸入パイプ21内を右方向(シリンダー10の方向)へと流れ始める。このとき同時に、シリンダー10内の容積が急激に増加することに起因して、シリンダー10内において圧力波Waが発生する。シリンダー10内の圧力波Waは、開口である吸入孔19aを経て、冷媒ガスの流れと逆方向に吸入パイプ21内を密閉容器2内の空間に向かって伝播していく(図72の(b)の時点)。
密閉容器2内の空間まで到達した圧力波Waは、冷媒ガスのよどみ状態の密閉容器2内の空間において反転した反射波Wbとなる。この反射波Wbは、吸入パイプ21内を冷媒ガスの流れと同一方向に伝播していく(図72の(c)の時点)。
つまり、シリンダー10内で発生した圧力波Waは、バルブプレート19の吸入孔19aを通って冷媒ガスの流れと逆方向に伝播する。そして、圧力波Waは密閉容器2内の空間で位相の反転した反射波Wbとなり、冷媒ガスの流れと順方向に伝播し、バルブプレート19の吸入孔19aに戻ってくる。
この反射波Wbが吸入孔19aに到達する時点と、シリンダー10内の容積が最大になる時点(吸入完了時点)とを一致させることにより、吸入完了時点で反射波Wbの持つ圧力エネルギーを冷媒ガスに付加することができるため、冷媒ガスの吸入圧力は上昇する。
この結果、シリンダー10内には、より密度の高い冷媒ガスが充填されることになり、圧縮1行程当たりの吐出冷媒量が増加し、冷媒循環量が増加して、密閉型圧縮機の冷凍能力を向上させていた。
しかしながら、上記従来の密閉型圧縮機の構成では、外気温変化により冷媒ガスの温度が変化して、冷媒ガスを伝わる音の速度(以下、冷媒ガス中の音速と称す)が変化した場合、共鳴周波数の共鳴モードの節部の位置が変化し、共鳴音の発生を抑えることができなくなる可能性があった。
また、吸入パイプにより発生する圧力波により衝撃音が発生し、騒音が発生する可能性があった。
また、外気温変化により冷媒ガスの温度が変化し、冷媒ガス中の音速が変化した場合、音速により圧力波や反射波の波長が変化する。このため、吸入完了時点で反射波の持つ圧力エネルギーの付加のタイミングに誤差が生じ、吸入圧力の上昇率が低下していた。
そのため、シリンダー内に対する密度の高い冷媒ガスを充填することが困難となり、圧縮1行程当たりの吐出冷媒ガス量が低下し、冷凍能力が低下する可能性があった。
また、外気温の変化に関係なく、常に冷媒ガス循環量を増加させ、冷凍能力の向上をさせる方法も考えられる。しかしこの場合、外気温が低い冬などにおいては部屋を閉めきることが多く、夏以上に衝撃音による騒音が気になる可能性があった。
本発明は、上記のような問題を解決するものであり、冷凍能力が高く、冷媒ガスの吸入損失が小さく、高い冷凍効率を有する、密閉型圧縮機を提供することを目的とするものである。
そこで、本発明の密閉型圧縮機は、後述する各種実施例において、上記目的を達成するとともに、下記の技術的利点を達成するものである。
本発明の後述する実施例1では、冷媒ガスの温度変化により冷媒ガス中の音速が変化し、共鳴周波数の共鳴モードの節部が変化しても、常に吸入パイプの開口端部が共鳴モードの節部となるように調整する。それにより、共鳴音の発生を抑え、低騒音化を達成した密閉型圧縮機を提供する。
本発明の後述する実施例2では、吸入パイプの開口端部が共鳴モードの節部となるようにし、それにより、吸入パイプの圧力波により発生する衝撃音の発生を大幅に低減する。こうして騒音を低減すると共に、冷凍能力も高まり、冷媒ガスの吸入損失が低い高効率の密閉型圧縮機が提供できる。
本発明の後述する実施例3では、吸入パイプ内の吸入流路の長さを変化させる。これにより、外気温が変化し冷媒ガスの温度変化により冷媒ガス中の音速が変化しても、反射波が吸入孔に到達する時点と、シリンダー内の容積が最大になる時点(吸入完了時点)とを一致させることができる。それ故、吸入完了時点で反射波の持つ圧力エネルギーが冷媒ガスに付加され、冷媒ガスの吸入圧力を上昇させる。
これにより、常に吸入圧力が上昇し、圧縮1行程当たりの吐出冷媒ガス量が増加し、冷媒ガス循環量が増加し、冷凍能力を向上させ、かつ冷媒ガス吸入損失を低減させる。それ故、高効率の密閉型圧縮機が得られる。
本発明の後述する実施例4では、吸入パイプの内径断面積を変化させる。これにより、外気温が変化し冷媒ガスの温度変化により冷媒ガス中の音速が変化しても、反射波が吸入孔に到達する時点と、シリンダー内の容積が最大になる時点(吸入完了時点)とを一致させることができる。それ故、吸入完了時点で反射波の持つ圧力エネルギーが付加され、冷媒ガスの吸入圧力が上昇する。
これにより、常に吸入圧力が上昇し、圧縮1行程当たりの吐出冷媒量が増加し、冷媒循環量が増加し、冷凍能力を向上させ、かつ冷媒ガスの吸入損失を低減させる。それ故、高効率の密閉型圧縮機が得られる。
高外気温時に比べ大きな冷凍能力の向上を必要としない低外気温時は、吸入パイプの内径断面積を小さくし、低外気温時ほど吸入パイプの内径断面積を絞る。これにより、騒音を大幅に低減することのできる密閉型圧縮機が得ることができる。
従来の構成では、吸入パイプ21長さや運転周波数、また冷媒ガス中の音速によっては、反射波が吸入孔に戻ってくるときのクランクシャフトの回転位置は必ずしも最適ではなかった。そのため冷凍能力の向上率が小さい可能性があった。
そこで、本発明の後述する実施例5では、反射波が吸入孔に戻ってくるクランクシャフトの回転位置(クランク角度)が最適となるように、吸入パイプ長さ等を調整し、それにより最大限の冷凍能力の向上効果が得られる密閉型圧縮機が得られる。
従来の構成は、外気温が高い場合も低い場合も常に冷凍能力の向上を図っていた。このため、大きな冷凍能力を必要としない低外気温時には必要以上の冷凍能力が供給されて密閉型圧縮機を含む冷凍システム全体の効率は低下し、結果的に総消費電力量が大きくなりがちであるという欠点があった。
そこで、本発明の後述する実施例6では、大きな冷凍能力を必要としない低外気温時には冷凍能力の向上効果が得られないようにして、消費電力量を小さく抑え、他方大きな冷凍能力を必要とする高外気温時には従来通りの冷凍能力向上効果が得られるように構成した。このように冷凍能力制御を行うことにより、総消費電力量の小さい密閉型圧縮機を得ることができる。
従来の構成では、密閉容器内の冷媒ガスの共鳴周波数がクランクシャフトの回転数の整数倍に近くなると共鳴音が発生すると共に、密閉容器内の冷媒ガスが共鳴した。このため、圧力波が吸入パイプの開口端部で反射する時に密閉容器内の冷媒ガスが共鳴する。その影響を受けて、反射波の圧力振幅が小さくなり、吸入圧力の上昇率が低下して、冷凍能力の向上効果が小さくなりがちであるという欠点があった。
そこで、本発明の後述する実施例7では、密閉容器内の冷媒ガスの共鳴周波数がクランクシャフトの回転数の整数倍近くとならないように構成した。これにより、共鳴音の発生を防ぐと共に、圧力波が吸入パイプの開口部で反射する時の圧力振幅の減衰を防止した。従って、常に吸入圧力が上昇し、冷凍能力の向上効果が得られる密閉型圧縮機が得られる。
本発明の後述する実施例8では、吸入される冷媒ガスの脈動を小さくして密閉容器内の冷媒ガスを加振する力を小さくし、密閉容器内の冷媒ガスの共鳴周波数にかかわらず常に共鳴音を小さくする。それと共に、密閉容器内の冷媒ガスの共鳴周波数にかかわらず常に圧力波が吸入パイプの開口端部で反射する時の圧力振幅の減衰を防止した。従って、密閉容器形状や運転条件等のあらゆる変化にかかわらず常に吸入圧力が上昇し、冷凍能力の向上効果が得られる密閉型圧縮機が得られる。
前述の図69に示す従来の構成では、吸入パイプ21がシリンダーヘッド80やバルブプレート19と接触している。このため、起動後の時間経過に伴い、シリンダーヘッド80等の温度が大きく上昇し、吸入パイプ21の温度も追従して上昇してしまう。この結果、吸入パイプ21内の冷媒ガス温度が上昇し、冷媒ガス中の音速が変化し、反射波が吸入孔19aに到達するタイミングにずれが生じる。これにより、従来の密閉型圧縮機では安定した吸入圧力上昇効果が得られない可能性があった。
そこで、本発明の後述する実施例9では、シリンダーヘッド等の温度が大きく変化しても、吸入パイプの温度変化を小さくする。これにより、冷媒ガス中の音速変化を小さくすることができ、安定した吸入圧力上昇効果が発生する。従って、起動後の時間経過に影響されず安定した高い冷凍能力を有する密閉型圧縮機が得られる。
図69に示した従来の構成は、吸入パイプ21の開口端部21aが密閉容器2内に配置されているため、温度が高く、密度が低い冷媒ガスが吸入パイプ21内に吸入される。このため、冷媒ガス中の音速が速く、圧縮性の影響が小さくなり、圧力波の発生が弱くなる。従って、従来の密閉型圧縮機では吸入圧力が減少する可能性があった。
仮に、温度の低い冷媒ガスをシリンダー10内に吸入させるために、吸入パイプ21の開口端部21aを密閉容器2内の第2の吸入パイプの開口端部と連通させると、反射波の発生がなくなり、吸入圧力の上昇が得られない可能性があった。
本発明の後述する実施例10では、大きな圧力波を発生させ吸入圧力上昇効果を増加させ、且つ、温度の低い冷媒ガスをシリンダー内に吸入させることである。それにより、温度の低い冷媒ガスによる冷媒循環量の向上効果を加え、冷凍能力の向上効果を大幅に増加させ、冷凍能力が高く、低騒音な密閉型圧縮機が得られる。
図69に示した従来の構成は、運転条件変化等により、冷媒ガス中の音速が変化した場合、吸入パイプ21の長さが一定では、反射波がバルブプレート19の吸入孔19aに到達するまでの時間が変化する。それ故、シリンダー10への吸入タイミングにずれが発生し、運転条件によっては、吸入圧力上昇効果が大きく減少し、冷凍能力不足を起こす可能性があった。
そこで、本発明の後述する実施例11では、運転条件変化によらず、常に吸入圧力を上昇させ、安定した高い冷凍能力を供給する。
図69に示した従来の構成は、常に吸入パイプ21が吸入孔19aに連通しているため、起動時から吸入圧力上昇効果が発生する。このため、起動トルクが高くなり、高外気温等の高い圧力状態では、トルク不足から起動不良を起こす可能性があった。
そこで、本発明の後述する実施例12では、起動時には吸入圧力上昇効果を抑え、起動トルクを下げることにより、起動不良を防止する。こうして、信頼性を上げると共に、安定運転時は吸入圧力上昇効果により高い冷凍能力を有する密閉型圧縮機を得ることができる。
図69に示した従来の構成では、冷媒ガスが密閉容器2内の空間で加熱され、シリンダー10内に充填される冷媒ガスの密度が低下した場合、冷媒循環量が減少し、冷凍能力が低下する可能性があった。
そこで、本発明の後述する実施例13では、吸入流路となる第1の吸入パイプの密閉容器内の開口端部を共鳴モードの節部となるように配置した。また、第2の吸入パイプの密閉容器内の開口端部を吸入流路の開口端部近傍に設けた。これらにより、密閉容器内に生じる共鳴は防止されている。それ故、低騒音でかつ冷媒ガスの密度を高めて、冷凍能力を向上させる密閉型圧縮機を提供することである。
図69に示した従来の構成では、吸入パイプ21により発生する圧力波により衝撃音が発生し、騒音が発生する上、冷媒ガスが密閉容器2内の空間で加熱され、シリンダー10内に充填される冷媒ガスの密度が低下する。これにより、従来の密閉型圧縮機では冷媒循環量が減少し、冷凍能力が低下する可能性があった。
そこで、本発明の後述する実施例14では、吸入流路となる第1の吸入パイプの密閉容器内の開口端部を共鳴モードの節部となるように配置する。且つ、第2の吸入パイプの密閉容器内の開口端部を吸入流路の開口端部近傍に設けている。このため、吸入流路の圧力波により発生する衝撃音の発生は大幅に低減し、低騒音でかつ冷媒ガスの密度の高い、冷凍能力を大幅に向上した密閉型圧縮機が得られる。
従来の構成においては、長い吸入流路が限られた密閉容器内に設けられているため、吸入流路の構造が複雑になり、曲率の異なる複数の曲げ部を有していた。そのため、圧力波Waや反射波Wbが吸入流路を伝播する際に、曲率の異なる曲げ部において圧力の振幅が小さくなる。また、反射波Wbがバルブプレートの吸入孔に戻る時には、反射波Wbの圧力振幅が減衰し、従来の密閉型圧縮機では高い冷凍能力の向上効果が得られない可能性があった。
そこで、本発明の後述する実施例15では、圧力波Waや反射波Wbの圧力振幅の減衰を低減し、吸入圧力を上昇させている。このため、高い冷凍能力の向上を有する密閉型圧縮機が得られる。
従来の構成においては、吸入流路が密閉容器内の高温の冷媒ガスから熱量を受け、吸入流路の温度が上昇し、吸入流路内の吸入ガス温度が上昇する。このため、吸入される冷媒ガスの密度が小さくなり、冷媒循環量が減少しがちであった。
そこで、本発明の後述する実施例16では、吸入流路が密閉容器内の高温の冷媒ガスから受ける熱量を小さくしている。このように、吸入流路の温度上昇を低減して、吸入流路内の冷媒ガスの温度の上昇を低減させる。このため、大きな冷媒循環量が得られる密閉型圧縮機を得ることができる。
さらに、実施例16では、吸入される冷媒ガス温度が低く、密度の高い冷媒ガスを吸入流路内に吸入している。これにより、吸入される冷媒ガス内の音速が遅くなるため、冷媒ガスの圧縮性能力が大きくなる。このため、大きな圧力波が発生し、高い冷凍能力の向上が得られる、密閉型圧縮機が得られる。
従来の構成は、吸入流路の開口端部が密閉容器内に開口されているため、圧力波が吸入流路の開口端部で反射する時、密閉容器内の冷媒ガスを加振し、共鳴音を発生する可能性があった。
そこで、本発明の後述する実施例17では、吸入ガスの脈動を小さくし、密閉容器内の冷媒ガスを加振する力を小さくしている。これにより、密閉型圧縮機は密閉容器内の冷媒ガスの共鳴周波数にかかわらず常に共鳴音を小さくすることができる。
実施例17では、密閉容器内の冷媒ガスの共鳴周波数にかかわらず常に圧力波が吸入流路の開口端部で反射する時の圧力振幅の減衰を防止している。このため、密閉型圧縮機は密閉容器形状や運転条件等のあらゆる変化にかかわらず、常に冷媒ガスの吸入圧力が上昇し、安定して高い冷凍能力の向上が得られる。
さらに、実施例17では、吸入流路の温度分布を均一化し、冷媒ガス中の音速変化を小さくしている。このため、密閉型圧縮機は圧力波の減衰を小さくし、安定した吸入圧力の上昇を得ることができる。従って、安定した冷凍能力の向上が得られる密閉型圧縮機が得られる。
従来の構成においては、密閉型圧縮機の通常運転時などのようなあまり冷凍能力を必要としない場合においても、冷凍能力が増加し、それに伴って電動機の入力も大きくなり、総合的に消費電力量が増加する可能性があった。
そこで、本発明の後述する実施例18では、電動圧縮要素に高負荷がかかる高外気温時や高負荷時にのみ過給効果が得られるように構成する。これにより、総合的に消費電力量が少ない密閉型圧縮機が得られる。
従来の構成では、吸入流路内の冷媒ガスが密閉容器内の空間で加熱され、シリンダー内に充填される冷媒ガスの密度が低下する。このため、従来の密閉型圧縮機では冷媒循環量が減少し、冷凍能力が低下する可能性があった。
そこで、本発明の後述する実施例19では、電動圧縮要素に高負荷がかかる高外気温時や高負荷時にのみ過給効果が得られるように構成する。これにより、総合的に消費電力量が少なくなる。そして、吸入流路である第1の吸入パイプの密閉容器内の開口端部を第2の吸入パイプの密閉容器内の開口端部の近傍に設けることにより、シリンダー内に吸入される冷媒ガスの密度を高め、効率が高い密閉型圧縮機が得られる。
従来の構成では、バルブ機構の追従性に問題があり、特に高回転領域において回転数の増加に比例した冷凍能力が得られない可能性があった。
そこで、本発明の後述する実施例20では、回転数に比例した能力以上の冷凍能力が得られるように、特に高回転領域において回転数制御に加えて過給を行うものである。これにより、実施例20の密閉型圧縮機では外気温や負荷に応じた冷凍能力が得られ、少ない消費電力量となる。
図69に示した従来の構成では、吸入流路である吸入パイプ21がバルブプレート19にほぼ直結されている。このため、従来の密閉型圧縮機では吸入孔19a付近での吸入ガスの脈動等に伴い発生する騒音が、あまり減衰されずに吸入流路を伝達し、最終的に密閉容器2の外に伝達する騒音が大きくなる可能性があった。
そこで、本発明の後述する実施例21では、冷凍能力を小さくすることなく、吸入される冷媒ガスの脈動等に伴い発生する騒音を減衰させた。このため、実施例21の密閉型圧縮機は騒音の小さい圧縮機となる。
従来の構成は、図72のWbで示すように、反射波がシリンダー10内に戻るとき、反射波の進む方向に対してサクションリード20は垂直に近い角度に配置されている。このため、反射波の多くはサクションリード20で垂直に近い角度で反射される。そのため、シリンダー10内に反射波の圧力エネルギーが有効に伝わらず、反射波による冷媒ガスに対する過給効果が十分に得られなくなり、冷凍能力の向上が十分に得られない可能性があった。
そこで、本発明の後述する実施例22では、反射波がシリンダー内に戻るとき、サクションリードによる反射によって妨害されにくく構成して、シリンダー内に反射波の圧力エネルギーが有効に入るように構成した。このため、実施例22の密閉型圧縮機は大きな冷凍能力を有する。
上記従来の構成は、外気温が高い場合も低い場合も、常に大きな冷凍能力が得られる。このため、従来の密閉型圧縮機では、大きな冷凍能力を必要としない低外気温時には必要以上の冷凍能力が供給されて密閉型圧縮機を含む冷凍システム全体の効率が低下する。そして、結果的に総消費電力量が大きくなる可能性があった。
そこで、本発明の後述する実施例23及び24では、大きな冷凍能力を必要としない低外気温時には大きな冷凍能力が得られないように構成して、消費電力量を小さく抑え、他方、大きな冷凍能力を必要とする高外気温時には従来通りの大きな冷凍能力発揮するように構成した。このため、冷凍能力制御を行うことにより、総消費電力量の小さい密閉型圧縮機が得られる。
発明の開示
上記目的を達成するために、本発明の請求項1の密閉型圧縮機は、
動力源であるモーター部と、
前記モーター部により駆動されるクランクシャフト、ピストン、シリンダー等の機械部と、
前記モーター部と前記機械部とを収納し、潤滑油を貯溜する密閉容器と、
前記シリンダーの端面に配設され、吸入孔を有するバルブプレートと、
一端が前記バルブプレートの前記吸入孔に実質的に直結され、他端が開口端部として前記密閉容器内空間に配置された吸入流路と、
を具備し、
前記開口端部が、
(1)前記密閉容器の水平断面にてその断面積が実質的に最大となる面の重心を通る第1の線分であり、かつ当該第1の線分が前記密閉容器の内壁面間の距離が最小となる位置にあり、前記第1の線分の中心点において前記第1の線分と実質的に直交する第1の平面、
(2)前記第1の線分を含む水平面において、前記第1の線分と実質的に直交する前記密閉容器の内壁面間の第2の線分の中心点を通り、かつ前記第2の線分と実質的に直交する第2の平面、又は
(3)前記密閉容器の鉛直方向における上方内壁面と前記潤滑油面との間の最大距離となる第3の線分の中心点を通り、かつ前記第3の線分と実質的に直交する第3の平面、
の3つの平面のうち少なくとも1つの平面上に配置されている密閉型圧縮機であって、
前記密閉型圧縮機は、前記吸入孔の開閉を行うサクションリードを具備し、
前記サクションリードの開き始めのクランク角度をθs(rad)とし、前記吸入流路の長さをL(m)とし、前記クランクシャフトの回転米をf(Hz)とし、前記吸入流路内の冷媒ガスにおける音速をAs(m/sec)とし、吸入開始時に前記吸入孔において発生する圧力波の下記(式1)で示される戻りクランク角度θr(rad)が下記(式2)の範囲になるように構成されている。
θr=θs+4π×L×f/As ・・・・(式1)
1.4(rad)≦θr≦3.0(rad)・・・・(式2)
従って、本発明の密閉型圧縮機によれば、吸入流路の開口端部が共鳴モードの節部となることにより、吸入流路の圧力波により発生する衝撃音の発生を大幅に抑制して騒音を低減できると共に、冷凍能力を向上させ、冷媒ガス吸入損失を低減することができ、高効率の密閉型圧縮機を得ることができる。
また、本発明の密閉型圧縮機は、反射波が吸入孔に戻ってくるクランク角度が最適となるように吸入流路長さ等が調整されているので、吸入圧力を上昇させ最大限の冷凍能力の向上効果を得ることができる。
本発明の請求項2の密閉型圧縮機は、
吸入マフラーを具備し、吸入流路の一端が前記バルブプレートの前記吸入孔に実質的に直結され、他端が開口端部として前記マフラー内に配置されている。
これにより、本発明の密閉型圧縮機は、冷媒ガスの脈動を小さくして密閉容器内の冷媒ガスを加振する力を小さくし、密閉容器内の冷媒ガスの共鳴周波数にかかわらず常に共鳴音が小さくなる。また、本発明の密閉型圧縮機によれば、密閉容器内の冷媒ガスの共鳴周波数にかかわらず、常に圧力波が吸入流路の開口部で反射する時の圧力振幅の減衰を防ぎ、密閉容器形状や運転条件等のあらゆる変化にかかわらず常に吸入圧力を上昇させ、冷凍能力の向上効果を得ることができる。
本発明の請求項3の密閉型圧縮機は、
前記吸入流路は、一端が前記バルブプレートの前記吸入孔に実質的に直結され、他端が開口端部として前記密閉容器内に配置された第1の吸入流路と、
前記第1の吸入流路の開口端部の近傍に配置された開口端部を有する第2の吸入流路と、を具備する。
これにより、本発明の密閉型圧縮機においては、温度が低く、密度の高い冷媒ガスを吸入流路内に吸入することで、冷媒ガス中の音速が遅くなり、圧縮性の影響が大きくなり、大きな圧力波が発生する。これにより、本発明の密閉型圧縮機は、吸入圧力の上昇効果を増加させると共に、温度の低い冷媒ガスをシリンダー内に吸入させることにより、冷凍能力の向上効果を大幅に増加でき、高い冷凍能力を供給すると共に、圧力脈動が第2の吸入流路から冷凍サイクルへ伝わるのを低減し、騒音を低減できる。
本発明の請求項4の密閉型圧縮機は、
前記第1の吸入流路の開口端部が、
(1)前記密閉容器の水平断面にてその断面積が実質的に最大となる面の重心を通る第1の線分であり、かつ当該第1の線分が前記密閉容器の内壁面間の距離が最小となる位置にあり、前記第1の線分の中心点において前記第1の線分と実質的に直交する第1の平面、
(2)前記第1の線分を含む水平面において、前記第1の線分と実質的に直交する前記密閉容器の内壁面間の第2の線分の中心点を通り、かつ前記第2の線分と実質的に直交する第2の平面、又は
(3)前記密閉容器の鉛直方向における上方内壁面と前記潤滑油面との間の最大距離となる第3の線分の中心点を通り、かつ前記第3の線分と実質的に直交する第3の平面、
の3つの平面のうち少なくとも1つの平面上に配置されている。
これにより、本発明の密閉型圧縮機においては、吸入流路の密閉容器内の開口端部を共鳴モードの節部に配置し、吸入流路の圧力波により発生する衝撃音の発生を大幅に低減し、低騒音でかつ冷媒ガスの密度を高め、冷凍能力を大幅に向上させることができる。
本発明の請求項5の密閉型圧縮機は、
前記吸入孔の開閉を行うサクションリードと、
前記吸入流路に設けられた共鳴型マフラーと、を具備している。
これにより、本発明の密閉型圧縮機は、冷凍能力を小さくすることなく、吸入される冷媒ガスの脈動等に伴い発生する騒音を吸入流路に設けた共鳴型マフラーで減衰させ、吸入流路から密閉容器内に伝わる騒音を小さくすることができ、最終的に密閉容器外部に伝わる騒音は小さくなる。
本発明の請求項6の密閉型圧縮機は、
前記吸入孔の開閉を行うサクションリードを具備し、
前記吸入孔と前記吸入流路との直結部分における、吸入流路の軸方向が前記バルブプレートの接続面に対して90度より小さい角度となるように構成されている。
これにより、本発明の密閉型圧縮機は、反射波がシリンダー内に戻るとき、反射波はサクションリードに反射されずに直接シリンダー内に入りやすい構造を有し、反射波がサクションリードに反射される場合でも、反射波の進む方向とサクションリードとの角度は小さくなるため、反射後の反射波の進む向きは大きく変わらず、シリンダー内に入りやすくなる。すなわち、反射波はサクションリードによって妨害されにくくなり、シリンダー内に反射波の圧力エネルギーが有効に入るようになり、本発明の密閉型圧縮機は大きな冷凍能力を有している。
【図面の簡単な説明】
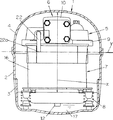
図1は本発明の実施例1による密閉型圧縮機のピストンの往復方向に節部を持つ時の平面断面図である。
図2は本発明の実施例1による密閉型圧縮機のピストンの往復方向に節部を持つ時の正面図である。
図3は本発明の実施例1による密閉型圧縮機のクランクシャフトの軸方向に節部を持つ時を示す正面図である。
図4は本発明の実施例2による密閉型圧縮機の縦断面図である。
図5は本発明の実施例2による密閉型圧縮機の平面断面図である。
図6は本発明の実施例3による密閉型圧縮機の縦断面図である。
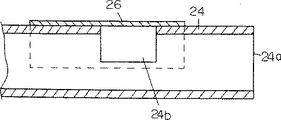
図7は本発明の実施例3による密閉型圧縮機の冷媒ガス中の音速が早いときの要部縦断面図である。
図8は本発明の実施例3による密閉型圧縮機の冷媒ガス中の音速が遅いときの要部縦断面図である。
図9は本発明の実施例4による密閉型圧縮機の縦断面図である。
図10は本発明の実施例4による密閉型圧縮機の高外気温時のB−B断面図である。
図11は本発明の実施例4による密閉型圧縮機の低外気温時のB−B断面図である。
図12は本発明の実施例5による密閉型圧縮機の縦断面図である。
図13は本発明の実施例5による密閉型圧縮機の平面断面図である。
図14は本発明の実施例5の密閉型圧縮機における冷媒ガスの挙動説明図である。
図15は本発明の実施例6による密閉型圧縮機の縦断面図である。
図16Aは本発明の実施例6による低外気温時の吸入パイプの開口部付近の断面図である。
図16Bは本発明の実施例6による高外気温時の吸入パイプの開口部付近の断面図である。
図17は本発明の実施例7による密閉型圧縮機の縦断面図である。
図18は本発明の実施例7による密閉型圧縮機の平面断面図である。
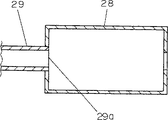
図19は本発明の実施例8による密閉型圧縮機の縦断面図である。
図20は本発明の実施例8による密閉型圧縮機の吸入パイプの開口部付近と吸入マフラーの断面図である。
図21は本発明の実施例9による密閉型圧縮機の縦断面図である。
図22は本発明の実施例9による密閉型圧縮機の図21のB−B線における断面図である。
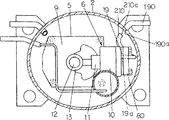
図23は本発明の実施例10による密閉型圧縮機の縦断面図である。
図24は本発明の実施例10による密閉型圧縮機の図23のC−C線における断面図である。
図25は本発明の実施例10における吸入圧力の上昇比率変化を示す特性図である。
図26は本発明の実施例10における冷凍能力向上比率変化を示す特性図である。
図27は本発明の実施例10における騒音変化を示す特性図である。
図28は本発明の実施例11による密閉型圧縮機の縦断面図である。
図29は本発明の実施例11による密閉型圧縮機の図28のD−D線における断面図である。
図30は本発明の実施例11における吸入パイプの開口端部を示す縦断面図である。
図31は本発明の実施例11における吸入パイプの開口端部の開口面を示す図である。
図32は本発明の実施例12による密閉型圧縮機の縦断面図である。
図33は本発明の実施例12による密閉型圧縮機の図32のE−E線における断面図である。
図34本発明の実施例12における起動時のシリンダーヘッド部分の要部を示す平面断面図である。
図35は本発明の実施例12における安定運転時のシリンダーヘッド部分の要部を示す平面断面図である。
図36は本発明の実施例13による密閉型圧縮機のピストンの往復方向に直交する方向に共鳴モードの節部を持つ時の平面断面図である。
図37は本発明の実施例13による密閉型圧縮機のピストンの往復方向に直交する方向に共鳴モードの節部を持つ時の正面図である。
図38は本発明の実施例14による密閉型圧縮機のピストンの往復方向に直交する方向に共鳴モードの節部を持つ時の縦断面図である。
図39は本発明の実施例14による密閉型圧縮機のピストンの往復方向に直交する方向に共鳴モードの節部を持つ時の平面断面図である。
図40は本発明の実施例15による密閉型圧縮機の縦断面図である。
図41は本発明の実施例15による図40に示した密閉型圧縮機のB−B線における正面断面図である。
図42は本発明の実施例15による別の吸入流路形状を有する密閉型圧縮機の縦断面図である。
図43は本発明の実施例15による図42に示した密閉型圧縮機のC−C線における正面断面図である。
図44は本発明の実施例16による密閉型圧縮機の縦断面図である。
図45は本発明の実施例16による図44に示した密閉型圧縮機のD−D線における正面断面図である。
図46は本発明の実施例17による密閉型圧縮機の縦断面図である。
図47は本発明の実施例17による図46に示した密閉型圧縮機のE−E線における正面断面図である。
図48は本発明の実施例18による密閉型圧縮機を示す平面断面図である。
図49は図48のB−B線における正面断面図である。
図50は本発明の実施例18による密閉型圧縮機の高負荷運転時における吸入流路の要部断面図である。
図51は本発明の実施例18による密閉型圧縮機の通常運転時における吸入流路の要部断面図である。
図52は本発明の実施例19による密閉型圧縮機を示す平面断面図である。
図53は図52のC−C線における正面断面図である。
図54は本発明の実施例19による密閉型圧縮機の高負荷運転時における吸入流路の要部断面図である。
図55は本発明の実施例19による密閉型圧縮機の通常運転時における吸入流路の要部断面図である。
図56は本発明の実施例20による密閉型圧縮機を示す平面断面図である。
図57は本発明の実施例20による密閉型圧縮機を含む冷凍装置の制御ブロック図である。
図58は実施例20の密閉型圧縮機における回転数制御時の冷凍能力変化を示す特性図である。
図59は本発明の実施例21による密閉型圧縮機を示す平面断面図である。
図60は実施例21の密閉型圧縮機の図59のB−B線における正面断面図である。
図61は実施例21の密閉型圧縮機の吸入流路付近を示す断面図である。
図62は本発明の実施例22による密閉型圧縮機のシリンダー付近を示す断面図である。
図63は本発明の実施例23による密閉型圧縮機の低外気温時の停止時におけるシリンダー付近を示す断面図である。
図64は実施例23の密閉型圧縮機の高外気温時の停止時におけるシリンダー付近を示す断面図である。
図65は本発明の実施例24による密閉型圧縮機の低外気温時の停止時におけるシリンダー付近を示す断面図である。
図66は実施例24の密閉型圧縮機の高外気温時の停止時におけるシリンダー付近を示す断面図である。
図67は従来の低騒音化を目的とした密閉型圧縮機の縦断面図である。
図68は従来の低騒音化を目的とした密閉型圧縮機の平面断面図である。
図69は従来の冷凍能力向上を目的とした密閉型圧縮機の縦断面図である。
図70は図69の密閉型圧縮機のA−A線における平面断面図である。
図71は図69の密閉型圧縮機における要部断面図である。
図72は冷媒ガス挙動の説明図である。
発明を実施するための最良の形態
以下、本発明の各実施例について、添付の図を用いて説明する。
《実施例1》
まず、本発明の密閉型圧縮機の一例である実施例1について説明する。
図1は本発明の実施例1による密閉型圧縮機を示す平面断面図であり、ピストンの往復方向(図1矢印w−w)を含む水平面における当該往復方向と直角の方向に共振モードの節部をもつ密閉型圧縮機を示す。図2は本発明の実施例1における密閉型圧縮機のピストンの往復方向を含む水平面における当該往復方向と直角の方向に共振モードを有する場合の状態を示す正面図である。図3は本発明の実施例1における密閉型圧縮機のクランクシャフトの軸方向に共振モードを有する場合の状態を示す正面図である。
図1及び図2において、密閉型圧縮機1は、下シェル3と上シェル4から構成された密閉容器2を有している。密閉容器2内の電動圧縮要素5は、上方部に機械部6、下方部にモーター部7が配置されるようにコイルばね8により密閉容器2に弾性支持されている。機械部6は、ブロック9と一体に設けられたシリンダー10、図1の矢印w上を図1において左右方向に往復運動するピストン11、クランクシャフト12、コンロッド13(連接棒)等により構成されている。モーター部7は、クランクシャフト12に焼ばめ固定(加熱後にはめ込み固着すること)されたローター、ステーター等により構成されている。ステーターはブロック9にねじ止め固定されている。潤滑油17は密閉容器2の下部に貯溜されている。
冷媒ガスをシリンダー10内に吸入する吸入パイプ22は、その一端が機械部6に吸入室25を介して取り付けられ、他端が開口端部22aとして密閉容器2内に配置されている。このため、吸入パイプ22はシリンダー10内と密閉容器2内とを連通させている。この吸入パイプ22は形状記憶合金により形成されており、吸入パイプ22の開口端部22aは温度変化に応じて所望の位置となるように構成されている。吸入パイプ22の開口端部22aは移動可能であって、後に述べる条件に従って、下記3つの平面の少なくとも1つ以上の平面上の何れかに配置される。
(1)前記密閉容器2の水平断面(図1の紙面に平行な断面)にてその断面積が実質的に最大となる面(図2の直線Hにて示す水平面)の重心(水平断面部分における重心の位置)を通る第1の線分(図1の矢印vにて示す線分)であり、かつ当該第1の線分(v)が(図2の直線Hにて示す水平面において)前記密閉容器2の内壁面間の距離が最小となる位置にあり、前記第1の線分(v)の中心点において前記第1の線分(v)と実質的に直交する第1の平面(図1の直線Wにて示す平面)上(図1において開口端部22aを示した位置)、又は
(2)前記第1の線分(v)を含む水平面(H)において、前記第1の線分(v)と実質的に直交する前記密閉容器2の内壁面間の第2の線分(図1の矢印wにて示す線分)の中心点を通り、かつ前記第2の線分(w)と実質的に直交する第2の平面(図1の直線V及び図2の直線Xにて示す鉛直平面)上(図2において開口端部22aを示している位置)、又は
(3)前記密閉容器2の鉛直方向における内壁上面と前記潤滑油面との間の最大距離となる第3の線分(図3の矢印xにて示す線分)の中心点を通り、かつ前記第3の線分(x)と実質的に直交する第3の平面(図3の直線Yにて示す水平面)上(図3において開口端部22aを示した位置)、
の3つの平面の少なくとも1つの平面上に吸入パイプ22の開口端部22aが配置されている。
次に、上記のように構成された実施例1の密閉型圧縮機について、その動作について説明する。
冷凍冷蔵装置等のシステムから循環してきた冷媒ガスは、一旦密閉容器2内空間に開放され、そしてブロック9に固定された吸入パイプ22を介してシリンダー10内に吸入される。シリンダー10内の冷媒ガスはピストン11により圧縮される。その際、冷媒ガスはクランクシャフト12の1/2回転でシリンダー10内に吸入され、後の1/2回転で圧縮される。
そのため、冷媒ガスは連続的にシリンダー10内に吸入されないため、吸入パイプ22に冷媒ガスの圧力脈動が生じる。従って、その圧力脈動が密閉容器2内の空間を加振し、ピストン11の往復方向、ピストン11の往復方向を含む水平面における当該往復方向と直角の方向、及びクランクシャフト12の軸方向において共鳴モードが生じる。
その際、ピストン11の往復方向、ピストン11の往復方向を含む水平面における当該往復方向と直角の方向、及びクランクシャフト12の軸方向における共鳴モードの圧力脈動のエネルギーは冷媒ガス中の音速(冷媒ガスを通る音の速度)により変化する。
例えば、高外気温等で冷媒ガスの温度が高く、冷媒ガス中の音速が早くなった場合、共鳴モードの節部はピストン11の往復方向を含む水平面における当該往復方向と直角の方向に生じる。
その際、吸入パイプ22の密閉容器2内空間の開口端部22aをピストン11の往復方向を含む水平面における当該往復方向と直角の方向の共鳴モードの節部と一致するように設けることにより、圧力脈動は加振されず、共鳴音の発生を抑えることができる。図2は実施例1における密閉型圧縮機のピストン11の往復方向を含む水平面における当該往復方向と直角の方向の共振モードの節部と開口端部22aとが一致した状態を示す正面図である。
次に、低外気温等で冷媒ガスの温度が下がり、冷媒ガス中の音速が遅くなった場合、共鳴モードの節部はクランクシャフト12の軸方向に生じる。
この時、冷媒ガスの温度が低下して、吸入パイプ22の温度が低下するのに伴い、形状記憶合金で形成された吸入パイプ22の密閉容器2内空間の開口端部22aは鉛直下方向に曲がる。
このため、吸入パイプ22の密閉容器2内空間の開口端部22aは、クランクシャフト12の軸方向の共鳴モードの節部と一致する位置に配置されるため、圧力脈動は加振されず、共鳴音の発生を抑えることができる。図3は実施例1における密閉型圧縮機のクランクシャフト12の軸方向の共振モードの節部と開口端部22aとが一致した状態を示す正面断面図である。
実施例1の密閉型圧縮機においては、外気温の温度変化により冷媒ガス中の音速が変化し、共鳴周波数の共鳴モードの節部が変化しても、常に吸入パイプ22の閉口端部22aが共鳴モードの節部の位置となるように構成されている。このため、実施例1の密閉型圧縮機は、共鳴音の発生を抑え、低騒音化を達成することができる。
以上のように、実施例1の密閉型圧縮機において、シリンダー10内と密閉容器2内とを連通させている吸入パイプ22は、形状記憶合金により形成されており、吸入パイプ22の開口端部22aは、
(1)前記密閉容器2の水平断面にてその断面積が実質的に最大となる面(H)の重心を通る第1の線分(v)であり、かつ当該第1の線分(v)が前記密閉容器2の内壁面間の距離が最小となる位置にあり、前記第1の線分(v)の中心点において前記第1の線分(v)と実質的に直交する第1の平面(W)、
(2)前記第1の線分(v)を含む水平面(H)において、前記第1の線分(v)と実質的に直交する前記密閉容器2の内壁面間の第2の線分(w)の中心点を通り、かつ前記第2の線分(w)と実質的に直交する第2の平面(V)、又は
(3)前記密閉容器2の鉛直方向における内壁上面と前記潤滑油面との間の最大距離となる第3の線分(x)の中心点を通り、かつ前記第3の線分(x)と実質的に直交する第3の平面(Y)、の3つの平面のうち少なくとも1つの平面上に配置されている。
実施例1の密閉型圧縮機は、冷媒ガスの温度変化により冷媒ガス中の音速が変化し、共鳴周波数の共鳴モードの節部が変化しても、常に吸入パイプ22の開口端部22aが共鳴モードの節部となるよう配置されている。それ故、吸入パイプ22内における共鳴音の発生を防ぎ、騒音の発生を防止することができる。
なお、実施例1においては、外気温で冷媒ガスの温度が変化し、冷媒ガス中の音速が変化する場合であった。しかし、冷媒ガス中の音速が変化する条件の下ならば、圧力等の変化に起因する場合でも、上記実施例と同様の効果を有する。
上記実施例1において、高外気温時の共鳴モードの節部がピストン11の往復方向を含む水平面における当該往復方向と直角の方向にある場合と低外気温時の共鳴モードの節部がクランクシャフト12の軸方向にある場合について説明した。しかし、ピストン11の往復方向、ピストン11の往復方向を含む水平面における当該往復方向と直角の方向、クランクシャフト12の軸方向、および各々の方向の付近など共鳴モードの節部の変化に追従して吸入パイプ22の開口端部22aの位置が移動するように構成することにより、優れた低騒音化を達成した密閉型圧縮機を得ることができる。
なお、共鳴モードの節部の変化に伴い、吸入パイプ22の開口端部22aが追従して移動するように電気的又は機械的に構成されたものでも、上記実施例1と同様の効果が得られる。
《実施例2》
次に、本発明の密閉型圧縮機の一例である実施例2について添付の図を用いて説明する。
図4は本発明の実施例2による密閉型圧縮機の縦断面図を示す。図5は本発明の実施例2による密閉型圧縮機の平面断面図を示す。なお、実施例2の密閉型圧縮機において、前述の実施例1の密閉型圧縮機と同じ機能、構成を有するものには同じ符号を付して、その説明は省略する。
図4及び図5において、機械部6のシリンダー10の端面に固着されたバルブプレート19には吸入孔19aが形成されており、この吸入孔19aには吸入パイプ23の一端が直接接続されている。吸入パイプ23の他端は、開口端部23aとして密閉容器2内空間に配置されている。
吸入パイプ23の開口端部23aは、下記3つの平面の少なくとも1つ以上の平面上に配置される。
(1)前記密閉容器2の水平断面(図5の紙面に平行な断面)にてその断面積が実質的に最大となる面(図4の直線Hにて示す水平面)の重心(水平断面部分における重心の位置)を通る第1の線分(図5の矢印vにて示す線分)であり、かつ当該第1の線分(v)が(図4の直線Hにて示す水平面において)前記密閉容器2の内壁面間の距離が最小となる位置にあり、前記第1の線分(v)の中心点において前記第1の線分(v)と実質的に直交する第1の平面(図5の直線Wにて示す平面)上(図5において開口端部22aを示した位置)、
(2)前記第1の線分(v)を含む水平面(H)において、前記第1の線分(v)と実質的に直交する前記密閉容器2の内壁面間の第2の線分(図5の矢印wにて示す線分)の中心点を通り、かつ前記第2の線分(w)と実質的に直交する第2の平面(図5の直線Vにて示す鉛直平面)上、又は
(3)前記密閉容器2の鉛直方向における内壁上面と前記潤滑油面との間の最大距離となる第3の線分(図4の矢印xにて示す線分)の中心点を通り、かつ前記第3の線分(x)と実質的に直交する第3の平面(図4の直線Yにて示す水平面)上、
の3つの平面の少なくとも1つの平面上に吸入パイプ22の開口端部22aが配置されている。
図4及び図5に示す密閉型圧縮機は、吸入パイプ23の開口端部23aが第1の平面(W)上に配置されている場合である。
次に、上記のように構成された実施例2の密閉型圧縮機について、その動作を説明する。
シリンダー10内で発生した圧力波は、バルブプレート19の吸入孔19aを通り、冷媒ガスの流れと逆方向に伝播して、密閉容器2内の空間で位相が反転した反射波となる。この反射波は、冷媒ガスの流れと順方向に伝播し、吸入孔19aに戻ってくる。
この反射波が吸入孔19aに到達する時点と、シリンダー10内の容積が最大になる時点(吸入完了時点)とを一致させることにより、吸入完了時点で反射波の持つ圧力エネルギーが冷媒ガスに付加され、冷媒ガスの吸入圧力が上昇する。
この結果、シリンダー10内には、より密度の高い冷媒ガスが充填されることになり、圧縮1行程当たりの吐出冷媒量が増加し、冷媒循環量が増加して、冷凍能力が大幅に向上する。このように、実施例2の密閉型圧縮機においては、冷媒ガスの吸入損失が低減し、冷却効率を向上させることができる。
その際、シリンダー10内で発生した圧力波は衝撃音を発生させると共に、密閉容器2内の空間を加振し、ピストン11の往復方向、ピストン11の往復方向を含む水平面における当該往復方向と直角の方向、及びクランクシャフト12の軸方向に共鳴モードを発生させる。
図4及び図5に示す実施例2の密閉型圧縮機においては、ピストン11の往復方向を含む水平面における当該往復方向と直角の方向の共鳴モードの節部に、吸入パイプ23の密閉容器2内空間の開口端部23aを配置している。このため、実施例2の密閉型圧縮機は、吸入パイプ23の開口端部23aが共鳴モードの節部の位置となり、吸入パイプ23の圧力波により発生する衝撃音の発生を大幅に抑制して、低騒音化を達成することができる。
以上のように、実施例2の密閉型圧縮機は、吸入パイプ23の一端がバルブプレート19の吸入孔19aに直結され、他端が開口端部23aとして密閉容器2の空間内の所定の平面内に配置されている。このため、吸入パイプ23の開口端部23aが共鳴モードの節部となることにより、密閉型圧縮機は吸入パイプ23の圧力波により発生する衝撃音の発生を大幅に抑制して、騒音を低減することができる。このため、実施例2の密閉型圧縮機は、冷凍能力を向上させ、吸入損失を低減することができる高効率の密閉型圧縮機となる。
なお、実施例2において、吸入パイプ23の密閉容器2内空間の開口端部23aを、ピストン11の往復方向と直角方向の共鳴モードの節部とした構成のもので説明した。しかし、ピストン11の往復方向の共鳴モードの節部、またはクランクシャフト12の軸方向の共鳴モードの節部など、吸入パイプ23の密閉容器2内空間の開口端部が各方向の共鳴モードの節部であれば、上記実施例2と同様の効果を奏する。
《実施例3》
次に、本発明の密閉型圧縮機の一例である実施例3について添付の図を用いて説明する。
図6は本発明の実施例3による密閉型圧縮機の縦断面図を示す。図7は本発明の実施例3による密閉型圧縮機の冷媒ガス中の音速が早いときの要部縦断面図を示す。図8は本発明の実施例3による密閉型圧縮機の冷媒ガス中の音速が遅いときの要部縦断面図を示す。なお、実施例3の密閉型圧縮機において、前述の実施例1又は実施例2の密閉型圧縮機と同じ機能、構成を有するものには同じ符号を付して、その説明は省略する。
図6、図7及び図8において、機械部6のシリンダー10の端面に固着されたバルブプレート19には吸入孔19aが形成されている。この吸入孔19aには吸入パイプ24の一端が直接接続されている。吸入パイプ24の他端は、開口端部24aとして密閉容器2内空間に配置されている。
吸入パイプ24は長さ可変機構を備えている。図7及び図8において、符号24bは吸入パイプ24に形成された開口穴である。この開口穴24bは吸入パイプ24内空間と密閉容器2内空間とを連通させる開口端部24a以外の1つ以上の連通孔である。符号26は開口穴24bを開閉するバイメタルあるいは形状記憶合金等で形成された開口穴蓋である。
次に、上記のように構成された実施例3の密閉型圧縮機について、その動作を説明する。
シリンダー10内で発生した圧力波は、バルブプレート19の吸入穴19aを通って冷媒ガスの流れと逆方向に伝播し、密閉容器2内の空間で位相の反転した反射波となる。位相の反転した反射波は、冷媒ガスの流れと順方向に伝播し、吸入孔19aに戻ってくる。
この反射波が吸入孔19aに到達する時点と、シリンダー10内の容積が最大になる時点(吸入完了時点)とを一致させることにより、吸入完了時点で反射波の持つ圧力エネルギーが付加され、冷媒ガス吸入圧力は上昇する。
そのため、シリンダー10内には、より密度の高い冷媒ガスが充填されることになり、圧縮1行程当たりの吐出冷媒量が増加し、冷媒循環量が増加して、冷凍能力が大幅に向上する。
しかしながら、圧力波や反射波の波長は音速により変化するため、吸入完了時点で反射波の持つ圧力エネルギーの付加のタイミングに誤差が生じて、冷媒ガスの吸入圧力の上昇率が低下する。
そこで、図7に示すように、高外気温時などで冷媒ガス中の音速が早いときは、バイメタルあるいは形状記憶合金等で形成された開口穴蓋26が開口穴25を閉じることにより、吸入パイプ24の開口端が吸入パイプ24の先端である開口端部24aとなり、吸入パイプ24の長さが長くなる。
この結果、冷媒ガス中の音速が早くなり波長が変化した分、吸入パイプ24を長くすることができ、反射波が吸入孔19aに到達する時点と、シリンダー10内の容積が最大になる時点(吸入完了時点)とを一致させることができる。このため、実施例3の密閉型圧縮機は吸入完了時点で反射波の持つ圧力エネルギーが冷媒ガスに付加され、冷媒ガスの吸入圧力を上昇させることができる。
図8に示すように、低外気温時などで冷媒ガス中の音速が遅いときは、バイメタルあるいは形状記憶合金等で形成された開口穴蓋26が開口穴25を開放して、吸入パイプ24の開口端が吸入パイプ24の開口端部24aより手前となり、吸入パイプ24の長さが短くなることに相当する。
この結果、冷媒ガス中の音速が遅くなった場合、吸入パイプ24を短くすることで、反射波が吸入孔19aに到達する時点と、シリンダー10内の容積が最大になる時点(吸入完了時点)とを一致させることができ、吸入完了時点で反射波の持つ圧力エネルギーが冷媒ガスに付加され、冷媒ガスの吸入圧力を上昇させることができる。
以上のように、吸入パイプ24の長さを変化させることにより、外気温が変化し冷媒ガスの温度変化により冷媒ガス中の音速が変化しても、反射波が吸入孔19aに到達する時点と、シリンダー10内の容積が最大になる時点(吸入完了時点)とを一致させることができる。このため、実施例3の密閉型圧縮機は、吸入完了時点で反射波の持つ圧力エネルギーが冷媒ガスに付加され、吸入圧力を上昇させることができる。
これにより、実施例3の密閉型圧縮機は、常に吸入圧力が上昇し、圧縮1行程当たりの吐出冷媒量が増加し、冷媒循環量が増加する。このため、実施例3の密閉型圧縮機は、冷凍能力を向上させ、かつ吸入損失を低減させて、高い冷却効率を有する。
以上のように、実施例3の密閉型圧縮機は、吸入パイプ24の一端が密閉容器2内の空間に開口端部24aとして配置され、他端がバルブプレート19の吸入孔19aに直結されている。また、吸入パイプ24には長さ可変機構が設けられている。この長さ可変機構は、吸入パイプ24に吸入パイプ24内と密閉容器内2の空間を連通させる開口端以外の1つ以上の開口穴25と、この開口穴25を開閉するバイメタルあるいは形状記憶合金等で形成された開口穴蓋26で構成されている。この長さ可変機構により吸入パイプ24の長さを変化させることにより、外気温が変化して冷媒ガスの温度変化により冷媒ガス中の音速が変化しても、反射波が吸入孔19aに到達する時点と、シリンダー10内の容積が最大になる時点(吸入完了時点)とを一致させることができる。このため、吸入完了時点で反射波の持つ圧力エネルギーが冷媒ガスに付加され、冷媒ガスの吸入圧力を上昇させることができる。
これにより、実施例3の密閉型圧縮機においては、常に吸入圧力が上昇し、圧縮1行程当たりの吐出冷媒量が増加して、冷媒循環量が増加する。このため、実施例3の密閉型圧縮機は、冷凍能力が向上し、かつ吸入損失を低減させて高い冷却効率を有する密閉型圧縮機となる。
なお、実施例3において、外気温で冷媒ガスの温度が変化し、冷媒ガス中の音速が変化するとした。しかし、冷媒ガス中の音速が変化する条件ならば圧力等が変化した場合にも実施例3の密閉型圧縮機は有用である。
実施例3において、長さ可変機構は吸入パイプ24と、吸入パイプ24に吸入パイプ24内と密閉容器2内の空間を連通させる開口端部24a以外の1つ以上の開口穴25と、開口穴25の部分に開閉自在に設けられたバイメタルあるいは形状記憶合金等でできた開口穴蓋26で構成されている。しかし、長さ可変機構は、冷媒ガス中の音速の変化に伴いパイプ長さが変化する調整機構であれば、上記実施例3と同様の効果が得られることは言うまでもない。
《実施例4》
次に、本発明の密閉型圧縮機の一例である実施例4について添付の図を用いて説明する。
図9は本発明の実施例4による密閉型圧縮機の断面図を示す。図10は本発明の実施例4による密閉型圧縮機の高外気温時における図9のB−B断面図を示す。図11は本発明の実施例4による密閉型圧縮機の低外気温時における図9のB−B断面図を示す。なお、実施例4の密閉型圧縮機において、前述の実施例1、実施例2又は実施例3の密閉型圧縮機と同じ機能、構成を有するものには同じ符号を付して、その説明は省略する。
図9において、機械部6のシリンダー10の端面に固着されたバルブプレート19には吸入孔19aが形成されており、この吸入孔19aには吸入パイプ27の一端が直接接続されている。吸入パイプ27の他端は、開口端部27aとして密閉容器2内空間に配置されている。吸入パイプ27は線膨脹係数の大きい材料により形成されている。
次に、上記のように構成された実施例4の密閉型圧縮機について、その動作を説明する。
シリンダー10内で発生した圧力波は、バルブプレート19の吸入孔19aを通り冷媒ガスの流れと逆方向に伝播し、密閉容器2内の空間で位相の反転した反射波となる。この反射波は冷媒ガスの流れと順方向に伝播して、吸入孔19aに戻ってくる。
この反射波が吸入孔19aに到達する時点と、シリンダー10内の容積が最大になる時点(吸入完了時点)とを一致させることにより、吸入完了時点で反射波の持つ圧力エネルギーが冷媒ガスに付加され、冷媒ガスの吸入圧力が上昇する。
そのため、シリンダー10内には、より密度の高い冷媒ガスが充填されることにより、圧縮1行程当たりの吐出冷媒量が増加し、冷媒循環量が増加して、冷凍能力が大幅に向上する。
その際、シリンダー10内で発生した圧力波は衝撃音を発生させる。しかしながら、圧力波や反射波の波長は音速により変化するため、吸入完了時点で反射波の持つ圧力エネルギーの冷媒ガスへの付加のタイミングに誤差が生じ、冷媒ガスの吸入圧力はその上昇率が低下する。
そこで、図10に示すように、高外気温時などで冷媒ガス中の音速が早いときは、線膨脹係数の大きい材料からなる吸入パイプ27は、高温により膨脹して、吸入パイプ27の内径断面積が大きくなる。
このように、冷媒ガス中の音速が早くなり、反射波の波長の変化に応じて、吸入パイプ27の内径断面積が大きくなる。これにより、冷媒ガスの流速を下げ、反射波の戻りタイミングを遅くすることで、反射波が吸入孔19aに到達する時点と、シリンダー10内の容積が最大になる時点(吸入完了時点)とを一致させることができる。このため、実施例4の密閉型圧縮機では、吸入完了時点で反射波の持つ圧力エネルギーが冷媒ガスへ付加され、冷媒ガスの吸入圧力を上昇させることができる。
図11に示すように、低外気温時などで冷媒ガス中の音速が遅いときは、線膨脹係数の大きい材料からなる吸入パイプ27は、温度低下のために収縮して、吸入パイプ27の内径断面積が小さくなる。
このように、冷媒ガス中の音速が遅くなった場合、吸入パイプ27の内径断面積を小さくすることにより、冷媒ガスの流速を上げ、反射波の戻りタイミングを早くすることで、反射波が吸入孔19aに到達する時点と、シリンダー10内の容積が最大になる時点(吸入完了時点)とを一致させることができる。このため、吸入完了時点で反射波の持つ圧力エネルギーが冷媒ガスへ付加され、冷媒ガスの吸入圧力を上昇させることができる。ただし、吸入パイプ27の内径断面積が小さくなることにより、反射波の持つ圧力エネルギーが少し減少し、吸入圧力を上昇効果は少し低下する。
しかし、高外気温時に比べ大きな冷凍能力の向上を必要としないところの低外気温時は、吸入パイプ27の内径断面積が小さくなる。このように、冷凍能力の効果が少し減少するものの、外気温が低い冬などにおいては部屋を閉めきることが多く、夏以上に騒音が気になるような低外気温時において、実施例4の密閉型圧縮機は、吸入パイプ27の内径断面積を絞り、衝撃音を大幅に抑制して、騒音を大幅に減少させることができる。
従って、吸入パイプ27の内径断面積を変化させることにより、外気温が変化し冷媒ガス中の音速が変化しても、常に反射波が吸入孔19aに到達する時点と、シリンダー10内の容積が最大になる時点(吸入完了時点)とを一致させることができる。このため、実施例4の密閉型圧縮機は、吸入完了時点で反射波の持つ圧力エネルギーが冷媒ガスへ付加でき、冷媒ガスの吸入圧力が上昇して、圧縮1行程当たりの吐出冷媒量が増加し、冷媒循環量が増加し、冷凍能力が向上する。
高外気温時に比べ大きな冷凍能力の向上を必要としない低外気温時には、吸入パイプ27の内径断面積が小さくなり、冷凍能力の向上が少し減少する。しかし、外気温度が低くなるほど吸入パイプ27の内径断面積が絞られる。このため、実施例4の密閉型圧縮機は騒音の発生を大幅に抑制することができる。
以上のように、実施例4の密閉型圧縮機は、吸入パイプ27の一端が密閉容器2内の空間に開口し、他端がバルブプレート19の吸入孔19aに直結され、かつ線膨脹係数の大きい材料により構成されている。このため、外気温が変化し冷媒ガス中の音速が変化しても、外気温度の変化に応じて吸入パイプ27の内径断面積を変化させることにより、反射波が吸入孔19aに到達する時点と、シリンダー10内の容積が最大になる時点(吸入完了時点)とを常に一致させることができる。このため、実施例4の密閉型圧縮機においては、吸入完了時点で反射波の持つ圧力エネルギーが冷媒ガスへ付加でき、冷媒ガスの吸入圧力が上昇する。このため、実施例4の密閉型圧縮機は、圧縮1行程当たりの吐出冷媒量が増加し、冷媒循環量が増加し、冷凍能力が向上する。
高外気温時に比べ大きな冷凍能力の向上を必要としない低外気温時は、吸入パイプ27の内径断面積が小さくなる。それ故、実施例4の密閉型圧縮機は、冷凍能力の向上が少し減少するものの、外気温度が低くなるほど吸入パイプ27の内径断面積が絞られる。このため、実施例4の密閉型圧縮機は、騒音を大幅に低減することができる。
なお、実施例4において、外気温で冷媒ガスの温度が変化し、冷媒ガス中の音速が変化するとした。しかし、冷媒ガス中の音速が変化する条件ならば圧力等が変化する場合でも実施例4の密閉型圧縮機は有用である。
実施例4において、吸入パイプ27の内径断面積可変機構は線膨脹係数の大きい材料を用いて吸入パイプ27を構成した。しかし、冷媒ガス中の音速の変化に伴い吸入パイプ27の内径断面積が変化する調整機構を用いるのであれば、上記実施例4と同様の効果が得られることは言うまでもない。
《実施例5》
次に、本発明の密閉型圧縮機の一例である実施例5について添付の図を用いて説明する。
図12は本発明の実施例5の密閉型圧縮機における冷媒ガスの挙動を示す説明図である。図13は実施例5の密閉型圧縮機の縦断面図を示す。図14は実施例5の密閉型圧縮機における冷媒ガス挙動とクランクシャフトとの関係を示す説明図である。なお、実施例5の密閉型圧縮機において、前述の各実施例の密閉型圧縮機と同じ機能、構成を有するものには同じ符号を付して、その説明は省略する。
図12及び図13において、機械部6のシリンダー10の端面に固着されたバルブプレート19には吸入孔19aが形成されており、この吸入孔19aには吸入パイプ229の一端が直接接続されている。吸入パイプ229の他端は、開口端部229aとして密閉容器2内空間に配置されている。
図14において、冷媒ガスは、吸入行程の開始(図14の(a)の時点)では、クランクシャフト12が基準位置にあり、バルブプレート19の吸入孔19aは塞がれている。このため、冷媒ガスの流れは停止している。
次に、クランクシャフト12が回転して、ピストン11が右側に移動し、シリンダー10内の容積が急激に増加する。この結果、シリンダー10内の空間と密閉容器2内の空間とに圧力差が発生し、サクションリード20が開き始める(図14の(b)の時点)。このときのクランクシャフト12の回転位置(以後、クランク角度と称す)をθs(rad)とする。
サクションリード20が開き、冷媒ガスは吸入パイプ229内を右方向(シリンダー10の方向)へと流れ始める。このとき同時に、シリンダー10内の容積が急激に増加することに起因して、シリンダー10内において圧力波Waが発生する。シリンダー10内の圧力波Waは、開口である吸入孔19aを経て、冷媒ガスの流れと逆方向に吸入パイプ229内を密閉容器2内の空間に向かって伝播していく。
密閉容器2内の空間まで到達した圧力波Waは、冷媒ガスのよどみ状態の密閉容器2内の空間において反転した反射波Wbとなる。この反射波Wbは、吸入パイプ229内を冷媒ガスの流れと同一方向に伝播していく(図14の(c)の時点)。
そして、反射波Wbは、冷媒ガスの流れと順方向に伝播して、バルブプレート19の吸入孔19aに戻ってくる(図14の(d)の時点)。
図14の(a)に示す上死点のクランク角度を0(rad)としたとき、サクションリード20の開き始め(図14の(b))のクランク角度をθs(rad)とし、吸入パイプ229の長さをL(m)とし、クランクシャフト12の回転数をf(Hz)とし、吸入パイプ229内の吸入される冷媒ガス中の音速をAs(m/sec)とし、吸入開始時に吸入孔19aにおいて発生する圧力波が反射波となって吸入孔19aに戻るクランク角度をθr(rad)とすると、これらの関係は下記(式1)により表される。
θr=θs+4π×L×f/As ・・・・(式1)
1.4(rad)≦θr≦3.0(rad)・・・・(式2)
このとき、圧力波の戻りクランク角度θrは(式2)の範囲に入るように吸入パイプ229の長さL等が調整されている。
次に、上記のように構成された実施例5の密閉型圧縮機について、その動作を説明する。
吸入行程時にサクションリード20が開くと同時に発生した圧力波Waは、冷媒ガスの流れと逆方向に伝播する。それはさらに、密閉容器2内の空間で位相の反転した反射波Wbとなり、冷媒ガスの流れと順方向に伝播し、吸入孔19aに戻ってくる。また、反射波Wbには幅があるので(式1)で示すクランク角度θrで反射波の波頭が吸入孔19aに戻る。また、それに遅れてクランク角度がさらに進んだ時に反射波Wbの波尾が吸入孔19aに戻り、幅を持った反射波Wbの戻りが完了する。
次に、反射波Wbが吸入孔19aに戻るときのクランク角度と冷凍能力の向上効果との関係を吸入パイプ229の長さを例にとって説明する。
吸入パイプ229の長さLが短いときは、(式1)からわかるように反射波Wbの戻りクランク角度θrは小さくなる、すなわち反射波Wbは吸入行程の早いタイミングで返ってくる。そのため、吸入行程が完了する前に幅を持った反射波Wbが全て吸入孔19aに戻り終ることが起こり得る。その場合には、反射波Wbの戻りが完了した後は吸入孔19aにおける圧力が下がることになり、吸入行程の途中であるにもかかわらず、サクションリード20が閉じたり、シリンダー10内から吸入パイプ229に冷媒ガスが逆流したりする。このため、シリンダー10内に吸入する冷媒ガスの密度を十分に高めることができず、冷凍能力の向上効果は小さくなってしまう。
また、逆に吸入パイプ229の長さLが長いときは、反射波Wbは吸入行程の遅いタイミングで返ってくる。あるいは吸入行程が終わった後で返ってくることになる。そのため、幅を持った反射波Wbが全て吸入孔19aに戻り終わる前に吸入行程が終わり、シリンダー10内に吸入する冷媒ガスの密度を十分に高めることができない。従って、冷凍能力の向上効果は小さくなってしまう。
このように、吸入パイプ229の長さは、短過ぎても長過ぎても冷凍能力の向上効果は小さくなる。冷凍能力の向上効果が最大限になる最適な吸入パイプ229の長さ、すなわち最適な反射波Wbの戻りクランク角度θrは存在する。しかし、反射波Wbには幅があるため、冷凍能力の向上効果がほぼ最大限に得られる反射波の戻りクランク角度も幅を有する。往復式の密閉型圧縮機の場合、反射波の戻りクランク角度θrは、(式2)の範囲において冷凍能力の向上効果がほぼ最大限に得られる。
例えば、冷媒がHFC−134aで、吸入される冷媒ガスの圧力が0.085(MPa)、その冷媒ガスの温度が80(℃)の場合、音速Asは176.3(m/s)となる。そして、クラクンシャフト12の回転数fを58.5(Hz)、サクションリード20の開き始めのクランク角度θsを0.96(rad)とすると、(式2)を満たすためには吸入パイプ229の長さLを0.10〜0.48(m)とすればよい。
このように、本発明の実施例5の密閉型圧縮機は反射波の戻りクランク角度が最適となるよう吸入パイプ229の長さ等が調整されているので、冷凍能力の向上効果が最大限に得られる。
以上のように、本実施例5の密閉型圧縮機では、サクションリード20の開き始めのクランク角度をθs(rad)とし、吸入パイプ229の長さをL(m)とし、クランクシャフト12の回転数をf(Hz)とし、吸入パイプ229内の吸入される冷媒ガス中の音速をAs(m/sec)として、吸入開始時に吸入孔19aにおいて発生する(式1)で示される圧力波の戻りクランク角度θr(rad)が(式2)の範囲になるように構成されている。
このため、本実施例5の密閉型圧縮機は、反射波Wbが吸入孔19aに戻ってくるクランク角度が最適となり、吸入圧力を上昇させ最大限の冷凍能力の向上効果を得ることができる。
なお、冷媒種類や吸入される冷媒ガスの圧力、温度が違い音速が違う場合、反射波Wbの戻りクランク角度が(式2)を満たされるように吸入パイプ229の長さを調整すれば、上記実施例5と同様の効果が得られる。また、クランクシャフト12の回転周波数、サクションリード20の開き始めのクランク角度が違う場合でも、反射波Wbの戻りクランク角度が(式2)を満たされるように吸入パイプ229の長さを調整すれば、上記実施例5と同様の効果が得られる。
《実施例6》
次に、本発明の密閉型圧縮機の一例である実施例6について添付の図を用いて説明する。
図15は本発明の実施例6による密閉型圧縮機の縦断面図を示す。図16Aは本発明の実施例6による低外気温時の吸入パイプの開口部付近の断面図を示す。図16Bは本発明の実施例6による高外気温時の吸入パイプの開口部付近の断面図を示す。なお、実施例6の密閉型圧縮機において、前述の各実施例の密閉型圧縮機と同じ機能、構成を有するものには同じ符号を付して、その説明は省略する。
図15、図16A及び図16Bにおいて、機械部6のシリンダー10の端面に固着されたバルブプレート19には吸入孔19aが形成されており、この吸入孔19aには吸入パイプ239の一端が直接接続されている。吸入パイプ239の他端は、開口端部239aとして密閉容器2内空間に配置されている。
図16A及び図16Bに示すように、反射防止板240は吸入パイプ239の密閉容器2内の空間の開口端部239aの近傍に設けられている。この反射防止板240はバイメタルあるいは形状記憶合金等で形成された屈曲可能な板である。
次に、上記のように構成された実施例6の密閉型圧縮機について、その動作を説明する。
一般に低外気温時では、冷凍冷蔵装置は大きな冷凍能力を必要としない。しかし、密閉型圧縮機によって必要以上の冷媒循環量が供給されると、吸入圧力の低下、吐出圧力の上昇が起こり、密閉型圧縮機を含む冷凍システム全体の効率が低下し、結果的に総消費電力量が大きくなる。そのため、低外気温時における冷媒循環量を少なくすることができれば、総消費電力量は小さくすることができる。
実施例6の密閉型圧縮機は、低外気温時には各部位の温度も全体に低くなり、反射防止板240の温度も低くなっている。その場合、反射防止板240は、図16Aに示すように、吸入パイプ239の密閉容器2内の空間への開口端部239aに対向する形状を有している。図16Aに示す状態において、サクションリード20が開くと同時に発生した圧力波は、冷媒ガスの流れと逆方向に伝播し、吸入パイプ239の開口端部239aに達する。このとき、圧力波は、反射防止板240があるために完全な自由端としての反射ができなくなる。また、吸入パイプ239の開口端部239aと反射防止板240との間には隙間があるために、固定端としての反射もされない。
従って、低外気温時においては、反射防止板240のために圧力波が吸入パイプ239の開口端部239aで反射されず、冷媒循環量の向上効果が得られないため、実施例6の密閉型圧縮機は消費電力量を小さく抑えることができる。
また、高外気温時では反射防止板24の温度も高くなるために、バイメタルあるいは形状記憶合金等でできた反射防止板24は図5に示すように変形し、吸入パイプの開口部に対向しなくなる。従って、大きな冷凍能力が必要となる高外気温時には、圧力波は反射防止板24に妨害されることなく、従来通り吸入パイプ239の開口部で反射され、冷凍能力の向上効果が得られる。
以上のように、実施例6の密閉型圧縮機は、吸入パイプ239の一端が密閉容器2内の空間に開口し、他端が吸入孔19aに直結されており、吸入パイプ239の開口端部239aに対向してバイメタルあるいは形状記憶合金等でできた反射防止板24が設けられている。
このため、実施例6の密閉型圧縮機は、大きな冷凍能力を必要としない低外気温時には冷凍能力の向上効果が得られないようにして、消費電力量を小さく抑える。一方、大きな冷凍能力を必要とする高外気温時には、従来通りの冷凍能力向上効果が得られるよう、実施例6の密閉型圧縮機は構成されている。
以上のように、実施例6の密閉型圧縮機は、冷却能力制御を行うことにより、総消費電力量を小さくすることができる。
《実施例7》
次に、本発明の密閉型圧縮機の一例である実施例7について添付の図を用いて説明する。
図17は本発明の実施例7による密閉型圧縮機の縦断面図を示す。図18は本発明の実施例7の密閉型圧縮機の平面断面図を示す。なお、実施例7の密閉型圧縮機において、前述の各実施例の密閉型圧縮機と同じ機能、構成を有するものには同じ符号を付して、その説明は省略する。
図17及び図18において、機械部6のシリンダー10の端面に固着されたバルブプレート19には吸入孔19aが形成されており、この吸入孔19aには吸入パイプ23の一端が直接接続されている。吸入パイプ23の他端は、開口端部23aとして密閉容器2内空間に配置されている。
図17、図18において、密閉容器2は、下シェル3と上シェル4から構成されている。図18における符号aは密閉容器2の内面のピストン11の往復方向に対して直角方向の最大距離であり、符号bは密閉容器2内面のピストン11の往復方向の最大距離である。図17における符号cは密閉容器2の内面から潤滑油17面までのクランクシャフト12の軸心方向の最大距離である。これらのa、b、cのそれぞれの長さに対応して、密閉容器2内の冷媒ガスはそれぞれの方向に固有の共鳴周波数を持つ。それらの共鳴周波数がクランクシャフト12の回転数の整数倍付近とならないように、実施例7の密閉型圧縮機においては各距離a、b、c等が調整されている。
次に、上記のように構成された実施例7の密閉型圧縮機について、その動作を説明する。
吸入行程時にサクションリード20が開くと同時に発生した圧力波は、冷媒ガスの流れと逆方向に伝播し、密閉容器2内の空間で位相の反転した反射板となり、冷媒ガスの流れと順方向に伝播し、吸入孔19aに戻ってくる。
もし密閉容器2内の冷媒ガスが共鳴すると騒音が大きくなるだけでなく、前記の圧力波が吸入パイプ23の開口端部23aで反射する時に、密閉容器2内の冷媒ガスの共鳴、すなわち定在波の影響を受け、ロスが生じる。そのために、反射波の圧力振幅が小さくなり、吸入圧力の上昇率が低下して、冷凍能力の向上効果が小さくなる。
密閉容器2内の冷媒ガスが共鳴するのは、密閉容器2内の共鳴周波数と密閉型圧縮機の運転周波数の整数倍、すなわち加振周波数とがほぼ一致する場合である。
一般に向かい合う壁の間に発生する共鳴について、2壁間の距離Lw、共鳴周波数fr、媒体の音速Acとの間には下記(式3)の関係がある。
Lw=Ac/(2fr)・・・・・(式3)
この(式3)の関係を密閉型圧縮機に適用すると、Lwは向かい合う密閉容器2の内面間の距離、frは向かい合う密閉容器2の内面間に発生し得る共鳴周波数、Acは密閉容器2内の冷媒の音速である。すなわち、密閉容器2の共鳴周波数が運転周波数の整数倍に近くならないように、密閉容器2の内面の前記各方向長さa、b、cを決めれば共鳴は起こらない。しかし、実際は密閉容器2内の機械部6、モーター部7等の影響により(式3)で計算したLwから多少ずれるので、音響実験あるいは数値解析の結果との比較から求めた補正係数をかける必要があり、発明者の行った音響実験及び数値解析から、補正値は0.977であることが分かっている。従って、この補正値を考慮した各方向長さa、b、cを決めれば共鳴は起こらない。このように実施例7の密閉型圧縮機は密閉容器2内の冷媒ガスが共鳴しないため、共鳴音の発生を防ぐと共に、圧力波が吸入パイプ23の開口端部23aで反射する時の圧力振幅の減衰を防ぎ、常に吸入圧力が上昇し、冷凍能力の向上効果が得られる。
以上のように、実施例7の密閉型圧縮機は、密閉容器2内の冷媒ガスの共鳴周波数がクランクシャフト12の回転数の整数倍付近とならないように構成されているので、密閉容器2内の冷媒ガスが共鳴しない。このため、実施例7の密閉型圧縮機は、共鳴音の発生を防ぐと共に、圧力波が吸入パイプ23の開口端部23aで反射する時の圧力振幅の減衰を防ぎ、常に吸入圧力が上昇し、冷凍能力の向上効果が得られる。
《実施例8》
次に、本発明の密閉型圧縮機の一例である実施例8について添付の図を用いて説明する。
図19は本発明の実施例8による密閉型圧縮機の縦断面図を示す。図20は本発明の実施例8による密閉型圧縮機の吸入パイプの開口端部付近と吸入マフラーの断面図を示す。なお、実施例8の密閉型圧縮機において、前述の各実施例の密閉型圧縮機と同じ機能、構成を有するものには同じ符号を付して、その説明は省略する。
図19及び図20において、機械部6のシリンダー10の端面に固着されたバルブプレート19には吸入孔19aが形成されており、この吸入孔19aには吸入パイプ29の一端が直接接続されている。吸入パイプ29の他端には吸入マフラー28が設けられている。
次に、上記のように構成された実施例8の密閉型圧縮機について、その動作を説明する。
吸入行程時にサクションリード20が開くと同時に発生した圧力波は、バルブプレート19の吸入孔19aを通って冷媒ガスの流れと逆方向に伝播し、吸入マフラー28内の空間で位相の反転した反射波となる。この反射波は冷媒ガスの流れと順方向に伝播し、吸入孔19aに戻ってくる。
このとき、密閉容器2内の冷媒ガスが共鳴しているとしても、吸入パイプ29の開口端部29aが吸入マフラー28内にあるため、圧力波が吸入パイプ29の開口端部29aで反射する時に密閉容器2内の冷媒ガスの共鳴の影響を受けない。従って、実施例8の密閉型圧縮機は、圧力波が反射するときの圧力振幅の減衰を防ぐ。密閉容器2の形状や運転条件等の変化によって密閉容器2内の共鳴周波数がどのように変化しても、実施例8の密閉型圧縮機は、常に吸入圧力を上昇させ、冷凍能力の向上効果を得ることができる。
また、実施例8の密閉型圧縮機は、吸入マフラー28があるために、吸入される冷媒ガスの脈動が小さくなり、密閉容器2内の冷媒ガスを加振する力を小さくする。このため、実施例8の密閉型圧縮機は、密閉容器2内の冷媒ガスの共鳴周波数にかかわらず常に共鳴音を小さくする。
以上のように、実施例8の密閉型圧縮機は、吸入マフラー28と、一端が吸入マフラー28内に開口し他端が吸入孔19aに直結された吸入パイプ29とから構成されている。このため、実施例8の密閉型圧縮機は、吸入される冷媒ガスの脈動を小さくして密閉容器2内の冷媒ガスを加振する力を小さくし、密閉容器2内の冷媒ガスの共鳴周波数にかかわらず常に共鳴音を小さくすることができる。
また、実施例8の密閉型圧縮機は、密閉容器2内の冷媒ガスの共鳴周波数にかかわらず、常に圧力波が吸入パイプ29の開口部で反射する時の圧力振幅の減衰を防止する。このため、実施例8の密閉型圧縮機は、密閉容器2の形状や運転条件等のあらゆる変化にかかわらず、常に吸入圧力を上昇させ、冷凍能力の向上効果を得ることができる。
《実施例9》
次に、本発明の密閉型圧縮機の一例である実施例9について添付の図を用いて説明する。
図21は本発明の実施例9による密閉型圧縮機の縦断面図を示す。図22は図21の密閉型圧縮機のB−B線における平面断面図を示す。なお、実施例9の密閉型圧縮機において、前述の各実施例の密閉型圧縮機と同じ機能、構成を有するものには同じ符号を付して、その説明は省略する。
図21及び図22において、機械部6のシリンダー10の端面に固着されたバルブプレート19には吸入孔19aが形成されており、この吸入孔19aには吸入パイプ200の一端が直接接続されている。吸入パイプ200の他端は、開口端部200aとして密閉容器2内空間に配置されている。
吸入パイプ200は少なくともその一部がテフロンあるいはPBT等の熱伝導率の低い材料で形成されている。
次に、上記のように構成された実施例9の密閉型圧縮機について、その動作を説明する。
シリンダー10内で発生した圧力波は、バルブプレート19の吸入孔19aを通って、冷媒ガスの流れと逆方向に伝播し、密閉容器2内の空間で位相の反転した反射波となる。この反射波は冷媒ガスの流れと順方向に伝播し、吸入孔16aに戻ってくる。
吸入行程の間に、この反射波が吸入孔19aに到達させることにより、吸入完了時点で反射波の持つ圧力エネルギーが付加され、冷媒ガスの吸入圧力が上昇する。
そのため、シリンダー10内には、より密度の高い冷媒ガスが充填されることになり、圧縮1行程当たりの吐出冷媒量が増加する。この結果、実施例9の密閉型圧縮機は冷媒循環量が増加して、冷凍能力の大幅な向上が図られている。
実施例9の密閉型圧縮機は吸入パイプ200の少なくとも一部がテフロンあるいはPBT等の熱伝導率の低い材料で形成されているので、密閉型圧縮機の起動後の時間経過に伴いシリンダーヘッド80等の温度が大きく上昇しても、熱が吸入パイプ200に伝導するのを防止し、吸入パイプ200の温度変化を小さくすることができる。このため、実施例9の密閉型圧縮機は吸入パイプ200内の冷媒ガス中の音速変化を小さくすることができる。このため、実施例9の密閉型圧縮機は、安定した圧力波を発生させて吸入圧力の高い上昇効果を得ることができるとともに、起動後の時間経過に影響されず安定した高い冷凍能力を得ることができる。
実施例9の密閉型圧縮機は温度の低い冷媒ガスをシリンダー10内へ供給でき、冷媒循環量を向上させることができる。
以上のように、実施例9の密閉型圧縮機においては、吸入パイプ200の一端が密閉容器2内の空間に開口し、他端がバルブプレート19の吸入孔19aに直結され、かつ少なくとも一部がテフロンあるいはPBT等の熱伝導率の低い材料で形成されている。
このため、密閉型圧縮機の起動後の時間経過に伴いシリンダーヘッド80等の温度が大きく上昇しても、熱が吸入パイプ200を伝導することが防止され、吸入パイプ200の温度変化を小さくする。これにより、吸入パイプ200内の冷媒ガス中の音速変化を小さくすることができる。
この結果、実施例9の密閉型圧縮機は、安定した圧力波を発生させて吸入圧力の上昇を得ることができ、起動後の時間経過に影響されず安定した高い冷凍能力を得ることができる。
実施例9の密閉型圧縮機は、温度の低い冷媒ガスをシリンダー10内へ供給でき、冷媒循環量を向上させることができる。
なお、実施例9において、熱伝導率の低い材料で形成された吸入パイプを用いた密閉型圧縮機を示した。しかし、シリンダー部付近だけなどの部分的に熱伝導率の低い材料を用いても、上記実施例9と同様の効果が得られる。
《実施例10》
次に、本発明の密閉型圧縮機の一例である実施例10について添付の図を用いて説明する。
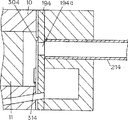
図23は本発明の実施例10による密閉型圧縮機の縦断面図を示す。図24は図23の密閉型圧縮機のC−C線における平面断面図を示す。図25は吸入圧力上昇比率変化を示す特性図である。図26は冷凍能力向上比率の変化を示す特性図である。図27は騒音変化率の変化を示す特性図である。なお、実施例10の密閉型圧縮機において、前述の各実施例の密閉型圧縮機と同じ機能、構成を有するものには同じ符号を付して、その説明は省略する。
図23及び図24において、機械部6のシリンダー10の端面に固着されたバルブプレート19には吸入孔19aが形成されており、この吸入孔19aには第1の吸入パイプ210の一端が直接接続されている。第1の吸入パイプ210の他端は、開口端部210aとして密閉容器2内空間に配置されており、吸入流路としての第2の吸入パイプ190の開口端部190aの近傍に配置されている。
次に、上記のように構成された実施例10の密閉型圧縮機について、その動作を説明する。
シリンダー10内で発生した圧力波は、バルブプレート19の吸入孔19aを通り、冷媒ガスの流れと逆方向に伝播し、密閉容器2内の空間で位相の反転した反射波となる。この反射波は、冷媒ガスの流れと順方向に伝播し、吸入孔19aに戻ってくる。
吸入行程の間に、この反射波が吸入孔19aに到達することにより、吸入完了時点で反射波の持つ圧力エネルギーが冷媒ガスに付加され、冷媒ガスの吸入圧力が上昇する。
そのため、シリンダー10内には、より密度の高い冷媒ガスが充填されることになり、圧縮1行程当たりの吐出冷媒量が増加し、冷媒循環量が増加する。この結果、実施例10の密閉型圧縮機は冷凍能力が大幅に向上したものとなる。
実施例10の密閉型圧縮機においては、密閉容器2内の第2の吸入パイプ190の開口端部190aの近傍に第1の吸入パイプ210の開口端部210aが配置されている。このため、実施例10の密閉型圧縮機は、温度が低く、密度の高い冷媒ガスを第1の吸入パイプ210内に吸入することができ、冷媒ガス中の音速が遅くなる。このため、実施例10の密閉型圧縮機は、圧縮性の影響が大きくなり、大きな圧力波を発生させることができる。
これにより、実施例10の密閉型圧縮機は、吸入圧力上昇効果を増加させることができる。そして、実施例10の密閉型圧縮機は、温度の低い冷媒ガスをシリンダー10内に吸入させることにより、冷凍能力の向上効果を大幅に増加させ、効率が良く高い冷凍能力を得ることができる。
実施例10の密閉型圧縮機は、第2の吸入パイプ190の開口端部190aと第1の吸入パイプ210の開口端部210aの間の隙間により、圧力脈動が第2の吸入パイプ190から冷凍サイクルへ伝わるのが低減される。このため、実施例10の密閉型圧縮機は、騒音を大幅に低減できる。
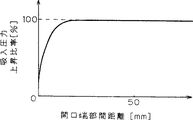
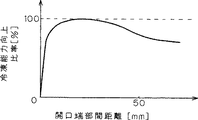
第1の吸入パイプ210の開口端部210aと第2の吸入パイプ190の開口端部190aとの間の距離(開口端部間距離)は、吸入圧力の上昇効果を大きく、冷凍能力の向上効果を大きく、そして騒音の低減効果を大きくするために、発明者の実験によれば3mmから50mmの間が好ましいことが明らかとなった。
この結果を図25、図26及び図27に示す。図25は縦軸に吸入圧力上昇比率(%)を示し、横軸に第2の吸入パイプ190の開口端部190aと第1の吸入パイプ210の開口端部210aとの間の隙間である開口端部間距離(mm)を示したグラフである。図25における吸入圧力上昇比率とは、シリンダー10内で発生した圧力波の圧力に対する、密閉容器2内の空間において圧力波が反射した反射波の圧力の比率を示す。
図26は縦軸に冷凍能力向上比率(%)を示し、横軸に開口端部間距離(mm)を示したグラフである。図26における冷凍能力向上比率とは、最大冷凍能力に対する測定された冷凍能力の比率である。
図27は縦軸に騒音変化率(%)をとり、横軸に開口端部間距離(mm)をとって示したものである。図27における騒音変化率とは、開口部間距離が0mmのときを100%としたときの騒音の圧力変化を示す。
以上のように、実施例10の密閉型圧縮機は、第1の吸入パイプ210の一端がバルブプレート19の吸入孔19aに直結されており、他端が密閉容器2内の第2の吸入パイプ190の開口端部190aの近傍に配置されている。このため、実施例10の密閉型圧縮機は、温度が低く、密度の高い冷媒ガスを第1の吸入パイプ210内に吸入することができるため、冷媒ガス中の音速を遅くすることができる。このために、実施例10の密閉型圧縮機は、圧縮性の影響が大きくなり、大きな圧力波を発生させることができる。このため、実施例10の密閉型圧縮機は、吸入圧力の上昇効果を増加させると共に、温度の低い冷媒ガスをシリンダー10内に吸入させることで、冷凍能力の向上効果を大幅に増加させ、高い冷凍能力を得ることができる。
実施例10の密閉型圧縮機は、第2の吸入パイプ190の開口端部190aと第1の吸入パイプ210の開口端部210aの間に隙間を形成することにより、圧力脈動が第2の吸入パイプ190から冷凍サイクルへ伝わるのを低減することができる。このため、実施例10の密閉型圧縮機は、騒音を大幅に低減することができる。
なお、第1の吸入流路としての第1の吸入パイプ210の開口端部210aを広くして、第2の吸入流路としての第2の吸入パイプ190の開口端部190aと相対向させることにより、冷媒ガスが流れやすくなり、冷凍能力の向上が図られることは言うまでもない。
《実施例11》
次に、本発明の密閉型圧縮機の一例である実施例11について添付の図を用いて説明する。
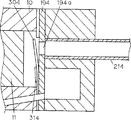
図28は本発明の実施例11による密閉型圧縮機の縦断面図を示す。図29は図28の密閉型圧縮機のD−D線における平面断面図を示す。図30は実施例11における第1の吸入パイプの開口端部の縦断面図を示す。図31は実施例11の第1の吸入パイプの開口端部の開口面を示す図である。
なお、実施例11の密閉型圧縮機において、前述の各実施例の密閉型圧縮機と同じ機能、構成を有するものには同じ符号を付して、その説明は省略する。
図28及び図29において、機械部6のシリンダー10の端面に固着されたバルブプレート19には吸入孔19aが形成されており、この吸入孔19aには第1の吸入パイプ220の一端が直接接続されている。第1の吸入パイプ220の他端は、開口端部220aとして密閉容器2内空間に配置されている。第2の吸入パイプ190はその開口端部190aが密閉容器2の内部空間に配置されている。
図29及び図30に示すように、第1の吸入パイプ220は、一端がバルブプレート19の吸入孔19aに直結され、他端が密閉容器2内の空間に開口する複数の開口端部220a、220bを持ち、かつ吸入孔19aから複数の開口端部220a、220bまでの長さが異なっている。
次に、上記のように構成された実施例11の密閉型圧縮機について、その動作を説明する。
シリンダー10内で発生した圧力波は、バルブプレート19の吸入孔19aを通り、冷媒ガスの流れと逆方向に伝播し、密閉容器2内の空間で位相の反転した反射波となる。この反射波は冷媒ガスの流れと順方向に伝播し、吸入孔19aに到達する。
吸入行程の間に、この反射波が吸入孔19aに到達することにより、吸入完了時点で反射波の持つ圧力エネルギーが冷媒ガスに付加され、吸入圧力が上昇する。
そのため、シリンダー10内には、より密度の高い冷媒ガスが充填されることになり、圧縮1行程当たりの吐出冷媒量が増加し、冷媒循環量が増加する。この結果、実施例11の密閉型圧縮機によれば、冷凍能力を大幅に向上させることができる。
このとき、吸入孔19aにおいて発生した圧力波は、吸入孔19aから開口端までの長さが異なる複数の開口端部220a、220bで次々反射し、吸入孔19aに到達して、シリンダー10内に供給される。
このことにより、実施例11の密閉型圧縮機は、吸入孔19aに反射波の到達するタイミングを広くとることができる。
従って、実施例11の密閉型圧縮機においては、運転条件の変化等により、冷媒ガス中の音速が変化し、1つの反射波の到達するタイミングがずれても、次々に他の反射波が吸入孔19aに到達する。このため、実施例11の密閉型圧縮機は、常にシリンダー10内に高い圧力の冷媒ガスを供給できる。
これにより、実施例11の密閉型圧縮機は、運転条件変化によらず常に吸入圧力を上昇させ安定した高い冷凍能力を得ることができる。
以上のように、実施例11の密閉型圧縮機は、第1の吸入パイプ220の一端がバルブプレート19の吸入孔19aに直結されており、他端が密閉容器2内の空間に開口し、かつ吸入孔19aから開口端までの長さが異なる複数の開口端部220a、220bを有している。このため、吸入孔19aにおいて発生した圧力波は、吸入孔19aから開口端までの長さが異なる複数の開口端部220a、220bで次々反射する。
この結果、実施例11の密閉型圧縮機は、吸入孔19aに反射波の戻るタイミングを広くとることができる。従って、実施例11の密閉型圧縮機においては、運転条件変化等により、冷媒ガス中の音速が変化し、1つの反射波の吸入孔19aに到達するタイミングがずれても、次々に他の反射波が吸入孔19aに到達する。このため、シリンダー10内には常に高い圧力の冷媒ガスが供給される。これにより、実施例11の密閉型圧縮機によれば、運転条件変化によらず常に吸入圧力を上昇させ安定した高い冷凍能力を得ることができる。
なお、実施例11においては、吸入流路として長さの異なる複数の開口端部220a,220bを有する吸入パイプ220を用いたが、長さの異なる複数本の吸入パイプとしても上記実施例11と同様の効果を得られる。
《実施例12》
次に、本発明の密閉型圧縮機の一例である実施例12について添付の図を用いて説明する。
図32は本発明の実施例12による密閉型圧縮機を示す縦断面図である。図33は図32の密閉型圧縮機のE−E線における平面断面図である。図34は実施例12における起動時のシリンダーヘッド部分の要部を示す平面断面図である。図35は実施例12における安定運転時のシリンダーヘッド部分の要部を示す平面断面図である。
なお、実施例12の密閉型圧縮機において、前述の各実施例の密閉型圧縮機と同じ機能、構成を有するものには同じ符号を付して、その説明は省略する。
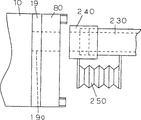
図32及び図33において、機械部6のシリンダー10の端面に固着されたバルブプレート19には吸入孔19aが形成されており、この吸入孔19aには第1の吸入パイプ230の一端が連通パイプ240を介して接続されるよう構成されている。第1の吸入パイプ230の他端は、開口端部230aとして密閉容器2内空間に配置されている。第2の吸入パイプ190はその開口端部が密閉容器2の内部空間に配置されている。
図33及び図34に示すように、第1の吸入パイプ230は、その一端が密閉容器2内の空間に開口しており、他端がバルブプレート19の吸入孔19aに直結されておらず、シリンダーヘッド80の手前で切断された状態である。切断された第1の吸入パイプ230は連通パイプ240によりシリンダーヘッド80の開口穴80aと連通可能に配置されている。
図34及び図35に示すように、吸入パイプ230と連通パイプ240との間にベローズ250が設けられている。すなわちベローズ250の一端が第1の吸入パイプ230に固定され、他端が連通パイプ240に固定されている。実施例12において、連通パイプ240とベローズ250により連通遮断機構が形成されている。
次に、上記のように構成された実施例12の密閉型圧縮機について、その動作を説明する。
シリンダー10内で発生した圧力波は、バルブプレート19の吸入孔19aを通り、冷媒ガスの流れと逆方向に伝播し、密閉容器2内の空間で位相の反転した反射波となる。この反射波は、冷媒ガスの流れと順方向に伝播して、吸入孔19aに戻ってくる。
吸入行程の間に、この反射波が吸入孔19aに到達させることにより、吸入完了時点で反射波の持つ圧力エネルギーが冷媒ガスへ付加され、吸入圧力が上昇する。
そのため、シリンダー10内には、より密度の高い冷媒ガスが充填されることにより、圧縮1行程当たりの吐出冷媒量が増加し、冷媒循環量が増加する。この結果、実施例12の密閉型圧縮機は冷凍能力を大幅に向上させることができる。
しかしながら、圧力波は起動時にも発生するため、起動トルクが大きくなり、モーター部7の能力向上を必要とした。
そこで、図34に示すように、起動時等の密閉容器2内の圧力が高い場合、ベローズ250は押し縮められ、連通パイプ240はシリンダーヘッド80から離れる。
これにより、第1の吸入パイプ230は吸入孔19aと連通しなくなり、圧力波は発生しなくなる。従って、冷凍能力向上効果はなくなるが、トルクを大幅に低減し、起動不良が防止でき、信頼性の向上を図ることができる。
一方、図35に示すように、起動後に密閉容器2内の圧力が低下すると、ベローズ250は引き延ばされ、連通パイプ240はシリンダーヘッド80に圧着される。
これにより、第1の吸入パイプ230は吸入孔19aと連通し、圧力波が発生し、吸入圧力の上昇効果を得ることができる。このため、実施例12の密閉型圧縮機は冷凍能力の向上が図られている。
以上のように、実施例12の密閉型圧縮機は、第1の吸入パイプ230の一端が密閉容器1内の空間に開口し、他端がバルブプレート19の吸入孔19aに直結されており、第1の吸入パイプ230がシリンダーヘッド80の手前で切断されている。そして、連通パイプ240を設けて、切断された第1の吸入パイプ230とシリンダーヘッド80の開口穴80aとを連通可能に構成し、連通遮断機構のベローズ250の一端を第1の吸入パイプ230に固定し、他端を連通パイプ240に固定している。
従って、起動時等の密閉容器2内の圧力が高い場合、ベローズ250は押し縮められ、連通パイプ240はシリンダーヘッド80から離れる。このため、第1の吸入パイプ230は吸入孔19aと連通しなくなり、圧力波は発生しなくなる。その結果、実施例12の密閉型圧縮機においては、起動時等の密閉容器2内の圧力が高い場合、冷凍能力の向上は図られないが、トルクを大幅に低減して、起動不良が防止でき、信頼性を向上することができる。
一方、実施例12の密閉型圧縮機においては、起動後、密閉容器2内の圧力が低下すると、ベローズ250は引き延ばされ、連通パイプ240はシリンダーヘッド80に圧着される。このため、第1の吸入パイプ230は吸入孔19aと連通し、圧力波が発生し、吸入圧力の上昇効果を得ることができ、冷凍能力の向上が図られる。
なお、実施例12において、連通遮断機構をベローズ250により構成したが、起動時において第1の吸入パイプ230を連通させない機構であれば、上記実施例12と同様の効果が得られることは言うまでもない。
また、実施例12において、連通遮断機構としたが、起動時に圧力波を発生させない機構であれば、上記実施例12と同様の効果が得られることは言うまでもない。
《実施例13》
次に、本発明の密閉型圧縮機の一例である実施例13について添付の図を用いて説明する。
図36は本発明の実施例13の密閉型圧縮機のピストンの往復方向を含む水平面における当該往復方向と直角の方向に共鳴モードの節部を持つ時の平面断面図である。図37は実施例13の密閉型圧縮機におけるピストンの往復方向を含む水平面における当該往復方向と直角の方向に共鳴モードの節部を持つ時の正面図である。
なお、実施例13の密閉型圧縮機において、前述の各実施例の密閉型圧縮機と同じ機能、構成を有するものには同じ符号を付して、その説明は省略する。
図36及び図37において、機械部6のシリンダー10の端面に固着されたバルブプレート211には吸入孔211aが形成されており、この吸入孔211aは吸入室251を介して第1の吸入パイプ241(吸入流路)の一端に接続されている。第1の吸入パイプ241の他端は、開口端部241aとして密閉容器2内空間に配置されている。
上記のように、吸入流路としての第1の吸入パイプ241は、その一端が密閉容器2内に開口し、他端が空間としての吸入室251を介してバルブプレート211の吸入孔211aに連結している。第1の吸入パイプ241の密閉容器2内の開口端部241aは、下記3つの平面の少なくとも1つ以上の平面上に配置される。
(1)前記密閉容器2の水平断面(図36の紙面に平行な断面)にてその断面積が実質的に最大となる面(図37の直線Hにて示す水平面)の重心(水平断面部分における重心の位置)を通る第1の線分(図36の矢印vにて示す線分)であり、かつ当該第1の線分(v)が(図37の直線Hにて示す水平面における)前記密閉容器2の内壁面間の距離が最小となる位置にあり、前記第1の線分(v)の中心点において前記第1の線分(v)と実質的に直交する第1の平面(図36の直線Wにて示す平面)上(図36において開口端部241aを示した位置)、又は
(2)前記第1の線分(v)を含む水平面(H)において、前記第1の線分(v)と実質的に直交する前記密閉容器2の内壁面間の第2の線分(図36の矢印wにて示す線分)の中心点を通り、かつ前記第2の線分(w)と実質的に直交する第2の平面(図36の直線Vにて示す鉛直平面)上、又は
(3)前記密閉容器2の鉛直方向における内壁上面と前記潤滑油17の油面との間の最大距離となる第3の線分(図37の矢印xにて示す線分)の中心点を通り、かつ前記第3の線分(x)と実質的に直交する第3の平面(図37の直線Yにて示す水平面)上、
の3つの平面の少なくとも1つの平面上に第1の吸入パイプ241の開口端部241aが配置されている。
図36及び図37に示す密閉型圧縮機は、第1の吸入パイプ241の開口端部241aが第1の平面(W)上に配置されている場合である。
図36及び図37に示すように、第1の吸入パイプ241の開口端部241aの近傍には第2の吸入パイプ260の開口端部260aが配設されている。この第2の吸入パイプ260は密閉容器2の外部の冷凍システムから冷媒ガスを吸入するよう構成されている。
次に、上記のように構成された実施例13の密閉型圧縮機について、その動作を説明する。
冷凍冷蔵装置等の冷凍システムから循環してきた冷媒ガスは、第2の吸入パイプ260を通り、密閉容器2内空間に一旦開放される。一旦開放された冷媒ガスは、第1の吸入パイプ241及び吸入室251を介してシリンダー10内に吸入され、ピストン11により圧縮される。その際、冷媒ガスはクランクシャフト12の1/2回転でシリンダー10内に吸入され、後の1/2回転で圧縮される。そのため、冷媒ガスは連続的にシリンダー10内に吸入されず、第1の吸入パイプ241に冷媒ガスの圧力脈動が生じる。従って、その圧力脈動が密閉容器2内の空間を加振し、ピストン11の往復方向、ピストン11の往復方向を含む水平面における当該往復方向と直角の方向、クランクシャフト12の軸方向に共鳴モードが生じてしまう。
しかし、実施例13の密閉型圧縮機においては、第1の吸入パイプ241の密閉容器2内空間への開口端部241aを、図36において距離aで示される線分(v)の中心点を通り、かつその線分(v)に直角となる平面上に配置されている。すなわち、実施例13の密閉型圧縮機は、ピストン11の往復方向を含む水平面における当該往復方向と直角の方向に生じた共鳴モードの節部のある平面上としている。このため、共鳴モードを励起する圧力脈動成分は、共鳴モードの節部に位置することになる。従って、共鳴モードの節部にて加振することとなり、共鳴モードは励起されず、共鳴音の発生を抑えることができる。
さらに、実施例13の密閉型圧縮機においては、第2の吸入パイプ260の密閉容器2内の開口端部260aを第1の吸入パイプ241の密閉容器2内の開口端部241aの近傍に設けることにより、第1の吸入パイプ241へ吸入される冷媒ガスが密閉容器2内の冷媒ガスにより加熱されることを防ぐことができる。このため、シリンダー10内には、より密度の高い冷媒ガスが充填されることになり、実施例13の密閉型圧縮機においては、圧縮1行程当たりの吐出冷媒量が増し、冷媒循環量が増加し、冷凍能力を向上させることができる。
以上のように、本実施例13の密閉型圧縮機は、クランクシャフト12、ピストン11、シリンダー10等の機械部6と、モーター部7と、下部に潤滑油17を貯溜する密閉容器2と、吸入孔211aを有しシリンダー10の端面に配設されたバルブプレート211と、第1の吸入パイプ241と、第2の吸入パイプ260とを有している。第1の吸入パイプ241の一端は吸入室251の空間を介してバルブプレート211の吸入孔211aに連結されており、他端の開口端部241aは密閉容器2内の所望の位置に配設されている。すなわち、開口端部241aは、
(1)密閉容器2の水平断面にて断面積が略最大となる平面上の重心を通り、かつ密閉容器2の内壁面間の距離が最小となる第1の線分(v:距離a)に対してその中心点を通り、かつ第1の線分(v)に略直角となる平面(W)上、又は
(2)水平断面の重心を通る距離が最小となる第1の線分vを含む水平面上にて略直角となる密閉容器2の内壁面間の第2の線分(w:距離b)に対してその中心点を通り、かつその第2の線分(w)に略直角となる平面(V)上、又は
(3)密閉容器2の鉛直方向の内壁上面と潤滑油17の油面との間の最大距離となる第3の線分(x:距離c)に対しその中心点を通り、かつその第3の線分(x)に略直角となる平面(Y)上、
の3つの平面の少なくとも1つの平面上に吸入流路の密閉容器内の吸入口として配置される。
そして、第2の流入パイプ260は、その一端が密閉容器2外へ導出され、他端が開口端部260aとして密閉容器2内に配置され、この開口端部260aが吸入流路としての第1の吸入パイプ241の開口端部241aの近傍に設けられている。
このため、実施例13の密閉型圧縮機は、密閉容器2内に生じる共鳴を防止し、共鳴音の発生による騒音増加を防止することができる。そして、実施例13の密閉型圧縮機は、冷媒ガスの密度を高め、冷凍能力を向上させることができる。
なお、実施例13においては、吸入流路としての第1の吸入パイプ241の密閉容器2内空間の開口端部241aを、ピストン11の往復方向を含む水平面における当該往復方向と直角の方向の共鳴モードの節部として説明した。しかし、吸入パイプ241の密閉容器2内空間の開口端部241aが、ピストン11の往復方向の共鳴モードの節部、またはクランクシャフト12の軸方向の共鳴モードの節部など、吸入流路2の密閉容器2内空間への開口端部が問題となる共鳴モードの節部に配置されていれば、上記実施例13と同様の効果を奏する。
実施例13では、吸入流路が吸入パイプ241と空間としての吸入室251として説明した。しかし、空間を有する吸入流路としてマフラー等が付加されている場合でも上記実施例13と同様の効果が得られる。
実施例13の密閉型圧縮機は、シリンダー10の数量が1個の場合で説明した。しかし、本発明は複数のシリンダーを有する密閉型圧縮機にも適用できる。
本発明の密閉型圧縮機は、吸入流路が2つ以上ある場合でも、それぞれの吸入流路の密閉容器2内への開口端部を上記実施例13に示した共鳴モードの節部の位置に配設することにより、上記実施例13と同様の効果が得られる。
《実施例14》
次に、本発明の密閉型圧縮機の一例である実施例14について添付の図を用いて説明する。
図38は、本発明の実施例14による密閉型圧縮機において、ピストン11の往復方向を含む水平面における当該往復方向と直角の方向に共鳴モードの節部を持つ時の縦断面図である。図39は実施例14の密閉型圧縮機のピストンの往復方向を含む水平面における当該往復方向と直角の方向に節部を持つ時の平面断面図である。
なお、実施例14の密閉型圧縮機において、前述の各実施例の密閉型圧縮機と同じ機能、構成を有するものには同じ符号を付して、その説明は省略する。
図38及び図39において、機械部6のシリンダー10の端面に固着されたバルブプレート211には吸入孔211aが形成されており、この吸入孔211aは第1の吸入パイプ271(吸入流路)の一端に直接接続されている。第1の吸入パイプ271の他端は、開口端部271aとして密閉容器2内空間の所定の位置に配置されている。
吸入流路である第1の吸入パイプ271の密閉容器2内の開口端部271aは、下記3つの平面の少なくとも1つ以上の平面上に配置されるよう構成されている。
(1)前記密閉容器2の水平断面(図37の紙面に平行な断面)にてその断面積が実質的に最大となる面(図38の直線Hにて示す水平面)の重心(水平断面部分における重心の位置)を通る第1の線分(図39の矢印vにて示す線分)であり、かつ当該第1の線分(v)が(図38の直線Hにて示す水平面において)前記密閉容器2の内壁面間の距離が最小となる位置にあり、前記第1の線分(v)の中心点において前記第1の線分(v)と実質的に直交する第1の平面(図39の直線Wにて示す平面)上(図39において、開口端部271aを示した位置)、又は
(2)前記第1の線分(v)を含む水平面(H)において、前記第1の線分(v)と実質的に直交する前記密閉容器2の内壁面間の第2の線分(図39の矢印wにて示す線分)の中心点を通り、かつ前記第2の線分(w)と実質的に直交する第2の平面(図39の直線Vにて示す鉛直平面)上、又は
(3)前記密閉容器2の鉛直方向における内壁上面と前記潤滑油17の油面との間の最大距離となる第3の線分(図38の矢印xにて示す線分)の中心点を通り、かつ前記第3の線分(x)と実質的に直交する第3の平面(図38の直線Yにて示す水平面)上、
の3つの平面の少なくとも1つの平面上に第1の吸入パイプ271の開口端部271aが配置されている。
図38及び図39に示す実施例14の密閉型圧縮機は、第1の吸入パイプ271の開口端部271aが第1の平面(W)上に配置されている場合である。
図38及び図39に示すように、第1の吸入パイプ271の開口端部271aの近傍には第2の吸入パイプ281の開口端部281aが配設されている。この第2の吸入パイプ281は密閉容器2の外部に導出している。
次に、上記のように構成された実施例14の密閉型圧縮機について、その動作を説明する。
バルブプレート211の近傍で発生した圧力波は、吸入孔211aを通り冷媒ガスの流れと逆方向に伝播し、密閉容器2内の空間で位相の反転した反射波となる。この反射波は冷媒ガスの流れと順方向に伝播し、吸入孔211aに戻ってくる。
この反射波が吸入孔211aに到達する時点と、シリンダー10内の容積が最大になる時点(吸入完了時点)とを一致させることにより、吸入完了時点で反射波の持つ圧力エネルギーが冷媒ガスに付加され、冷媒ガスの吸入圧力が上昇する。
そのため、シリンダー10内には、より密度の高い冷媒ガスが充填されることになり、圧縮1行程当たりの吐出冷媒量が増加し、冷媒循環量が増加する。このため、実施例14の密閉型圧縮機は冷凍能力の大幅に向上した装置となる。
冷凍冷蔵装置等のシステムから循環してきた第2の吸入パイプ281の冷媒ガスは、いったん密閉容器2内空間に開放され、バルブプレート211に固定された第1の吸入パイプ271を介してシリンダー10内に吸入され、ピストン11により圧縮される。その際、冷媒ガスはクランクシャフト12の1/2回転でシリンダー10内に吸入され、後の1/2回転で圧縮される。
このように冷媒ガスは連続的にシリンダー10内に吸入されないため、第1の吸入パイプ271に冷媒ガスの圧力脈動が生じる。従って、その圧力脈動が密閉容器2内の空間を加振し、ピストン11の往復方向、ピストン11の往復方向を含む水平面における当該往復方向と直角の方向、及びクランクシャフト12の軸方向に共鳴モードが発生する。
しかし、第1の吸入パイプ271の密閉容器2内空間の開口端部271aを、上記のように、距離a(図39)により示される線の中心点を通り、かつその線と直交する平面(W)上、すなわちピストン11の往復方向を含む水平面における当該往復方向と直角の方向における共鳴モードの節部の位置を含む平面上に配置している。このため、共鳴モードを励起する圧力脈動成分は、共鳴モードの節部に集中することになる。
従って、実施例14の密閉型圧縮機においては、圧力脈動が共鳴モードの節部を加振することになる。このため、この密閉型圧縮機においては、共鳴モードが励起されず、共鳴音の発生を抑えることができ、共鳴音により密閉型圧縮機の騒音が抑制されている。
さらに、実施例14の密閉型圧縮機では、第2の吸入パイプ281の密閉容器2内の開口端部281aを第1の吸入パイプ271の密閉容器2内の開口端部271aの近傍に設けられている。このため、実施例14の密閉型圧縮機は、第1の吸入パイプ271へ吸入される冷媒ガスが密閉容器2内の冷媒ガスにより加熱されることを防ぐことができる。そして、実施例14の密閉型圧縮機は、冷媒ガス中の音速が減少するため、圧縮能力が大きくなり、大きな圧力波が発生し、冷媒ガスの吸入圧力が大幅に上昇する。
実施例14の密閉型圧縮機は、以上のように構成されているため、シリンダー10内に、より密度の高い冷媒ガスが充填されることになり、圧縮1行程当たりの吐出冷媒量が増加する。このため、実施例14の密閉型圧縮機は、冷媒循環量が増加し、冷凍能力を大幅に向上させることができる。
なお、実施例14においては、吸入流路としての第1の吸入パイプ271が、その開口端部271aをピストン11の往復方向を含む水平面における当該往復方向と直角の方向の共鳴モードの節部に配置した構成とした。しかし、第1の吸入パイプ271の開口端部271aは、ピストン11の往復方向の共鳴モードの節部、またはクランクシャフト12の軸方向の共鳴モードの節部など、吸入流路の密閉容器2内空間への開口端が問題となる共鳴モードの節部の位置に配置されていればよい。
本発明の実施例14はシリンダー10の数にこだわらず適用できる。更に、吸入流路が2つ以上ある場合でも、それぞれの吸入流路の密閉容器2内への開口端を上記に示した共鳴モードの節部の位置に配置することにより、上記実施例14と同様の効果が得られる。
吸入流路としての第1の吸入パイプ271がバルブプレート211の吸入孔211aへわずかな空間(断面形状が実質的に同じである空間)を介して連結される構成であっても、上記実施例14とほぼ同等の効果が得られる。
以上のように、実施例14によれば、密閉容器内に生じる共鳴を防止し、共鳴音による密閉型圧縮機の騒音増加を防止することができる。そして、実施例14の密閉型圧縮機は、冷媒ガスの密度を高め、冷凍能力を向上させることができるという有利な効果が得られる。
実施例14によれば、吸入流路の密閉容器内への開口端が共鳴モードの節部となり、吸入流路の圧力波により発生する衝撃音の発生を大幅に低減し、密閉型圧縮機の騒音増加を防止することができる。このため、実施例14の密閉型圧縮機は、冷媒ガスの密度を高め、冷凍能力を大幅に向上させることができるという有利な効果が得られる。
《実施例15》
次に、本発明の密閉型圧縮機の一例である実施例15について添付の図を用いて説明する。
図40は本発明の実施例15による密閉型圧縮機を示す縦断面図である。図41は図40の密閉型圧縮機のB−B線における正面断面図である。図42は実施例15による別の吸入流路形状を有する密閉型圧縮機を示す縦断面図である。図43は図42の密閉型圧縮機のC−C線における正面断面図である。
なお、実施例15の密閉型圧縮機において、前述の各実施例の密閉型圧縮機と同じ機能、構成を有するものには同じ符号を付して、その説明は省略する。
図40及び図41において、機械部6のシリンダー10の端面に固着されたバルブプレート191には吸入孔191aが形成されており、この吸入孔191aは第1の吸入パイプ201(吸入流路)の一端に直接接続されている。第1の吸入パイプ201の他端は、開口端部201aとして密閉容器2内空間の所定の位置に配置されている。第1の吸入パイプ201(吸入流路)は、ほぼ均一な曲率の曲げ部201bを有している。
次に、上記のように構成された実施例15の密閉型圧縮機について、その動作を説明する。
吸入行程時にバルブプレート191の吸入孔191a付近で発生した圧力波は、冷媒ガスの流れと逆方向に伝播し、密閉容器2内の空間で位相の反転した反射波となり、冷媒ガスの流れと順方向に伝播し、吸入孔191aに戻ってくる。
吸入行程の間に、この反射波が吸入孔191aに到達させることにより、吸入完了時点での反射波の持つ圧力エネルギーが冷媒ガスに付加され、冷媒ガスの吸入圧力が上昇する。
そのため、実施例15の密閉型圧縮機においては、シリンダー10内に、より密度の高い冷媒ガスが充填されることになり、圧縮1行程当たりの吐出冷媒量が増加し、冷媒循環量が増加して、冷凍能力を向上させることができる。
また、実施例15の密閉型圧縮機は、第1の吸入パイプ201の各曲げ部201bの曲率をほぼ均一にすることで、曲げ部201bにおける圧力波の振幅の減少を抑制し、圧力の高い反射波をシリンダー10内に戻すことができ、より高い冷凍能力の向上を図ることができる。
また、実施例15の密閉型圧縮機は、第1の吸入パイプ201をコンパクトに形成でき、密閉容器2の小型化を達成できる。
以上のように、実施例15の密閉型圧縮機は、吸入孔191aを有しシリンダー10の端面に配設されたバルブプレート191と、一端が密閉容器2内の空間に開口し、他端がバルブプレート191の吸入孔191aにほぼ直結され、かつほぼ均一な曲率の曲げ部201bを有する第1の吸入パイプ201とを具備している。このため、実施例15の密閉型圧縮機は、圧力波や反射波の圧力振幅の減衰を低減することができる。そのため、実施例15の密閉型圧縮機は、吸入圧力を上昇させ、高い冷凍能力を得ることができる。
実施例15の密閉型圧縮機においては、吸入流路である第1の吸入パイプを図42及び図43に示すような、らせん状の吸入パイプ212に形成することにより、曲げ部212bの曲率を大きくとることができる。このため、実施例15の密閉型圧縮機は、第1の吸入パイプ212内の圧力の減衰をさらに低減できる。
なお、実施例15において、第1の吸入パイプ201、212がバルブプレート191の吸入孔191aにほぼ直結する構成とした。しかし、第1の吸入パイプ201、212とバルブプレート191の吸入孔191aとを断面積が実質的に等しい流路空間を介して連結しても上記実施例15と同等の効果が得られる。
実施例15の密閉型圧縮機において、吸入流路を管状の第1の吸入パイプ201、212により構成した。しかし、吸入パイプに代えて、例えば吸入流路を有するブロック状のものにより吸入流路を構成しても上記実施例15と同様の効果を得ることができる。
《実施例16》
次に、本発明の密閉型圧縮機の一例である実施例16について添付の図を用いて説明する。
図44は本発明の実施例16による密閉型圧縮機を示す縦断面図である。図45は図44の密閉型圧縮機のD−D線における正面断面図である。
なお、実施例16の密閉型圧縮機において、前述の各実施例の密閉型圧縮機と同じ機能、構成を有するものには同じ符号を付して、その説明は省略する。
図44及び図45において、機械部6のシリンダー10の端面に固着されたバルブプレート192には吸入孔192aが形成されており、この吸入孔192aは第1の吸入パイプ221(吸入流路)の一端に直接接続されている。第1の吸入パイプ221の他端は、開口端部221aとして密閉容器2内空間の所定の位置に配置されている。図45に示すように、第1の吸入パイプ221(吸入流路)は、吸入流路間が近接するように複数回曲げられている。
次に、上記のように構成された実施例16の密閉型圧縮機について、その動作を説明する。
吸入行程時にバルブプレート192の吸入孔192a付近で発生した圧力波は、冷媒ガスの流れと逆方向に伝播し、密閉容器2内の空間で位相の反転した反射波となり、冷媒ガスの流れと順方向に伝播し、吸入孔192aに戻ってくる。
吸入行程の間に、この反射波が吸入孔192aに到達させることにより、吸入完了時点での反射波の持つ圧力エネルギーが冷媒ガスに付加され、冷媒ガスの吸入圧力が上昇する。
そのため、実施例16の密閉型圧縮機においては、シリンダー10内に、より密度の高い冷媒ガスが充填されることになり、圧縮1行程当たりの吐出冷媒量が増加し、冷媒循環量が増加して、冷凍能力を向上させることができる。
実施例16の密閉型圧縮機においては、第1の吸入パイプ221を複数回曲げ、内部に低温の吸入ガスが流れる吸入パイプ221を近接させて配置している。このため、実施例16の密閉型圧縮機は、密閉容器2内の圧縮発熱、モーター発熱、摺動発熱等の影響で高温となっている密閉容器2内の冷媒ガスの影響を少なくすることができる。
これにより、実施例16の密閉型圧縮機は、密閉容器2内の高温の冷媒ガスの熱が第1の吸入パイプ221に伝わることが抑制され、第1の吸入パイプ221内の吸入ガスの温度の上昇を低減させることができる。この結果、実施例16の密閉型圧縮機は、吸入ガスの密度を高め、冷媒循環量を増加させることができる。
実施例16の密閉型圧縮機は、吸入される冷媒ガスの温度(吸入ガス温度)が低く、密度の高い冷媒ガスが吸入パイプ221内に吸入される。これにより、吸入ガスの音速が遅くなるため、冷媒ガスの圧縮性の効果が大きくなり、大きな圧力波が発生し、高い冷凍能力を得ることができる。
また、実施例16の密閉型圧縮機は、第1の吸入パイプ221をコンパクトに形成でき、密閉容器を小型化できる。
以上のように、実施例16の密閉型圧縮機は、吸入孔191aを有しシリンダー10の端面に配設されたバルブプレート191と、一端が密閉容器2内の空間に開口し、他端がバルブプレート191の吸入孔191aにほぼ直結され、かつ吸入流路間が近接するように複数回曲げられた第1の吸入パイプ221とを備えたものである。このため、実施例16の密閉型圧縮機は、第1の吸入パイプ221が密閉容器1内の高温の冷媒ガスから受ける熱量を小さくし、第1の吸入パイプ221の温度上昇を低減し、第1の吸入パイプ221内の吸入ガス温度の上昇を低減させている。この結果、実施例16の密閉型圧縮機は、大きな冷媒循環量を得ることができる。
それと共に、実施例16の密閉型圧縮機は、吸入ガス温度が低く、密度の高い冷媒ガスを第1の吸入パイプ221内に吸入することにより、吸入される冷媒ガス中の音速が遅くなる。このため、実施例16の密閉型圧縮機は、冷媒ガスの圧縮性の影響が大きくなり、大きな圧力波が発生し、高い冷凍能力の向上効果を得ることができる。
なお、実施例16において、第1の吸入パイプ221を複数回曲げて吸入流路間を近接させ、第1の吸入パイプ221が高温の密閉容器内の冷媒ガスから受ける熱量を減らす構成としたが、例えば近接した吸入流路を有するブロック状のものでも上記実施例16の密閉型圧縮機と同様の効果が得られる。
実施例16において、第1の吸入パイプ221どうしを近接させる構成とした。しかし、第1の吸入パイプ221どうしを密着させることにより、第1の吸入パイプ221と高温の密閉容器内の冷媒ガスとの熱交換面積を減少させてもよい。このように構成することにより、本発明の密閉型圧縮機は、第1の吸入パイプ221の受熱量が低減でき、さらに、高い冷凍能力の向上効果を得ることができる。
実施例16において、第1の吸入パイプ221をバルブプレート191の吸入孔191aにほぼ直結させる構成とした。しかし、第1の吸入パイプ221とバルブプレート191の吸入孔191aとを断面積が実質的に等しい流路空間を介して連結してもほぼ同等の効果が得られる。
《実施例17》
次に、本発明の密閉型圧縮機の一例である実施例17について添付の図を用いて説明する。
図46は本発明の実施例17による密閉型圧縮機を示す縦断面図である。図47は図46の密閉型圧縮機のE−E線における正面断面図である。
なお、実施例17の密閉型圧縮機において、前述の各実施例の密閉型圧縮機と同じ機能、構成を有するものには同じ符号を付して、その説明は省略する。
図46及び図47において、機械部6のシリンダー10の端面に固着されたバルブプレート193には吸入孔193aが形成されており、この吸入孔193aは第1の吸入パイプ231(吸入流路)の一端に直接接続されている。第1の吸入パイプ231の他端は、開口端部231aとして密閉容器2内空間の所定の位置に配置されている。図47に示すように、第1の吸入パイプ231(吸入流路)は、吸入流路間が近接するように複数回曲げられている。
図47に示すように、実施例17の密閉型圧縮機には吸入マフラー241が設けられている。この吸入マフラー241は第1の吸入パイプ231をほぼ包み込むよう構成されている。吸入マフラー241は、圧力波を反射するのに必要な容積を有している。
次に、上記のように構成された実施例17の密閉型圧縮機について、その動作を説明する。
吸入行程時にバルブプレート193の吸入孔193a付近で発生した圧力波は、冷媒ガスの流れと逆方向に伝播し、密閉容器2内の空間で位相の反転した反射波となり、冷媒ガスの流れと順方向に伝播し、吸入孔193aに戻ってくる。
吸入行程の間に、この反射波が吸入孔193aに到達させることにより、吸入完了時点での反射波の持つ圧力エネルギーが冷媒ガスに付加され、冷媒ガスの吸入圧力が上昇する。
そのため、実施例17の密閉型圧縮機においては、シリンダー10内に、より密度の高い冷媒ガスが充填されることになる。このため、実施例17の密閉型圧縮機は、圧縮1行程当たりの吐出冷媒量が増加し、冷媒循環量が増加して、冷凍能力を向上させることができる。
このとき、実施例17の密閉型圧縮機は、第1の吸入パイプ231の開口端部231aは吸入マフラー241内に配設されている。このため、実施例17の密閉型圧縮機においては、吸入ガスの脈動が吸入マフラー241で減衰され、密閉容器2内の冷媒ガスを加振する力を小さくし、密閉容器2内の冷媒ガスの共鳴周波数にかかわらず、常に共鳴音を小さくすることができる。
実施例17の密閉型圧縮機においては、密閉容器2内の冷媒ガスが共鳴しているとしても、第1の吸入パイプ231の開口端部231aが吸入マフラー241内にあるために、圧力波が吸入第1の吸入パイプ231の開口端部231aで反射する時に密閉容器2内の冷媒ガスの共鳴の影響を受けない。
従って、実施例17の密閉型圧縮機は、圧力波が第1の吸入パイプ231の吸入マフラー241内の開口端部241aで反射する時に密閉容器2空間内の共鳴の影響を受けて圧力振幅が減衰するのを防止する。このため、実施例17の密閉型圧縮機は、密閉容器2の形状や運転条件等におけるあらゆる変化にもかかわらず、冷媒ガスの吸入圧力が常に上昇し、安定した高い冷凍能力を得ることができる。
実施例17の密閉型圧縮機では、第1の吸入パイプ231を吸入マフラー241で囲うことにより、第1の吸入パイプ231の温度分布を均一化し、冷媒ガス中の音速変化を小さくすることができる。このため、実施例17の密閉型圧縮機は、圧力波の減衰を小さくして、安定した冷媒ガスの吸入圧力の上昇を得ることができ、安定した冷凍能力の向上効果を得ることができる。
実施例17の密閉型圧縮機においては、第1の吸入パイプ231をコンパクトに形成でき、密閉容器2を小型化することができる。
以上のように、実施例17の密閉型圧縮機は、吸入孔191aを有しシリンダー10の端面に配設されたバルブプレート191と、一端が密閉容器2内の空間に開口し、他端がバルブプレート191の吸入孔191aにほぼ直結された第1の吸入パイプ231と、第1の吸入パイプ231をほぼ包み込む吸入マフラー241とを具備している。このため、実施例17の密閉型圧縮機は、吸入ガスの脈動を小さくして密閉容器2内の冷媒ガスを加振する力を小さくし、密閉容器2内の冷媒ガスの共鳴周波数にかかわらず、常に共鳴音を小さくすることができる。
実施例17の密閉型圧縮機は、密閉容器2内の冷媒ガスの共鳴周波数にかかわらず、圧力波が第1の吸入パイプ231の開口端部231aで反射する時の圧力振幅の減衰を常に防ぐことができる。実施例17の密閉型圧縮機は、密閉容器2の形状や運転条件等のあらゆる変化にかかわらず、常に冷媒ガスの吸入圧力が上昇し、安定した高い冷凍能力を得ることができる。
実施例17の密閉型圧縮機は、第1の吸入パイプ231の温度分布を均一化し、冷媒ガス中の音速変化を小さくすることができる。このため、実施例17の密閉型圧縮機は、圧力波の減衰を小さくし安定した吸入圧力の上昇を得ることで、安定した冷凍能力を得ることができる。
なお、実施例17において、第1の吸入パイプ231がバルブプレート191の吸入孔191aにほぼ直結した構成とした。しかし、第1の吸入パイプ231とバルブプレート191の吸入孔191aとをわずかな空間(実質的に同じ断面形状を有する流路空間)を介して連結しても上記実施例17とほぼ同等の効果が得られる。
実施例17において、吸入流路を管状の第1の吸入パイプ231として説明した。しかし、例えば吸入流路が形成されたブロック状のものでも、上記実施例17と同様の効果を得ることができる。
《実施例18》
次に、本発明の密閉型圧縮機の一例である実施例18について添付の図を用いて説明する。
図48は本発明の実施例18による密閉型圧縮機を示す平面断面図である。図49は図48のB−B線における正面断面図である。図50は実施例18の密閉型圧縮機の高負荷運転時における吸入流路の要部断面図を示す。図51は実施例18の密閉型圧縮機の通常運転時における吸入流路の要部断面図を示す。
なお、実施例18の密閉型圧縮機において、前述の各実施例の密閉型圧縮機と同じ機能、構成を有するものには同じ符号を付して、その説明は省略する。
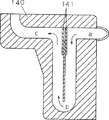
図48及び図49において、吸入流路を有する吸入流路ブロック140は、その吸入流路の一端が密閉容器2内の空間に開口端部として配置されており、他端がバルブプレート150の吸入孔150aにほぼ直結されている。
図50及び図51は吸入流路ブロック140の要部を示す断面図である。吸入流路ブロック140内には流路切り換え機構141が配設されている。流路切り換え機構141は設定温度を境にして、吸入流路を切り換えるよう機能を有し、バイメタル、形状記憶合金あるいは高負荷状態を検知して流路を切り換える弁等により構成されている。
次に、上記のように構成された実施例18の密閉型圧縮機について、その動作を説明する。
一般に低外気温時では、冷凍冷蔵装置は大きな冷凍能力を必要としない。しかし、このような状況において、密閉型圧縮機により必要以上の冷媒循環量が供給されると、吸入圧力の低下、吐出圧力の上昇が起こる。このため、密閉型圧縮機を含む冷凍システム全体の効率が低下し、結果的に総消費電力量が増加するという問題がある。
この問題を解決するために、低外気温時には、冷媒循環量を少なくすることにより、消費電力量は少なくすることができる。
実施例18の密閉型圧縮機は、高外気温時や高負荷時には各部温度が全体に高くなり、吸入流路を有する吸入流路ブロック140内に設けられている流路切り換え機構141の温度も高くなる。その場合、バイメタル、形状記憶合金あるいは高負荷状態を検知して流路を切り換える弁等の流路切り換え機構141は、図50に示される形状に配置されている。この時の吸入される冷媒ガスの流れは、図50におけるa→b→cの方向であり、吸入行程時に吸入孔150a付近で発生する圧力波は冷媒ガスの流れと逆方向に伝播する。そして、圧力波は密閉容器2内の空間で位相の反転した反射波となり冷媒ガスの流れと順方向に伝播し、吸入孔150aに戻ってくる。
吸入行程の間にこの反射波を吸入孔150aへ到達させることにより、吸入完了時点で反射波の持つ圧力エネルギーが冷媒ガスに付加され、冷媒ガスの吸入圧力が上昇する。
そのため、実施例18の密閉型圧縮機は、シリンダー10内にはより密度の高い冷媒ガスが充填されることになる。その結果、圧縮1行程当たりの吐出冷媒量が増加し、冷媒循環量が増加する。このため、実施例18の密閉型圧縮機は、大きな冷凍能力を必要とする高外気温時や高負荷時には従来の密閉型圧縮機と同様に冷凍能力を大幅に向上させることができる。
一方、通常運転時や低外気温時には各部温度が全体に低くなり、流路切り換え機構141の温度も低くなる。その場合、流路切り換え機構141が図51に示すように変形するため、吸入される冷媒ガスは図51に示すa→cの方向に流れる。このため、図51に示す冷媒ガスの流れは、図50に示したa→b→cの方向の流れに比べて短くなり、図51の吸入流路の長さでは、反射波が吸入孔150aに戻るタイミングが早くなり過ぎて、吸入完了時点では反射波の持つ圧力エネルギーが冷媒ガスに付加されず、過給効果は得られないことになる。
逆に吸入流路ブロック140の吸入流路の長さが長い場合には、反射波が吸入孔150aに戻るタイミングが遅くなり過ぎて、吸入完了時点では反射波の持つ圧力エネルギーが冷媒ガスに付加されず、過給効果は得られないことになる。
このように、本発明の実施例18の密閉型圧縮機は、高外気温時や高負荷時にのみ過給効果が得られるように吸入流路の長さ等が調整されている。このため、本発明の実施例18の密閉型圧縮機は、高外気温時や高負荷時以外は必要以上の冷凍能力が発生しなくなり、総合的に消費電力量を少なくすることができる。
以上のように、実施例18の密閉型圧縮機は、密閉容器2と、密閉容器2内に収納され圧縮要素300及び電動機により構成される電動圧縮要素81と、圧縮要素300を構成するシリンダー10と、吸入孔150aを有しシリンダー10の端面に配設されたバルブプレート150と、一端が密閉容器2内に開口し他端がバルブプレート150の吸入孔150aにほぼ直結する吸入流路を有する吸入流路ブロック140と、吸入流路に備えられた流路切り換え機構141とを具備している。このため、実施例18の密閉型圧縮機は、電動圧縮要素81に高負荷がかかる高外気温時や高負荷時にのみ過給効果が得られるようにすることで総合的に消費電力量を少なくすることができる。
なお、実施例18において、吸入流路がバルブプレート150の吸入孔150aにほぼ直結した構成で示したが、わずかな空間を介して吸入流路とバルブプレート150の吸入孔150aとを連結しても上記実施例18と同等の効果が得られる。
実施例18において、吸入流路を図48から図51に示すような吸入流路ブロック140内に形成したもので説明した。しかし、例えば吸入流路を管により構成したものでも上記実施例18と同等の効果が得られる。
《実施例19》
次に、本発明の密閉型圧縮機の一例である実施例19について添付の図を用いて説明する。
図52は本発明の実施例19による密閉型圧縮機を示す平面断面図である。図53は図52のC−C線における正面断面図である。図54は実施例19の密閉型圧縮機の高負荷運転時における吸入流路の要部断面図を示す。図55は実施例19の密閉型圧縮機の通常運転時における吸入流路の要部断面図を示す。
なお、実施例19の密閉型圧縮機において、前述の各実施例の密閉型圧縮機と同じ機能、構成を有するものには同じ符号を付して、その説明は省略する。
図52及び図53において、吸入流路を有する吸入流路ブロック170は、吸入流路の一端が密閉容器2内の空間に開口端部170aとして配置されており、他端がバルブプレート150の吸入孔150aにほぼ直結されている。吸入パイプ161は冷媒ガスを密閉容器2内に導入するものであり、吸入パイプ161の密閉容器内の開口端部は吸入流路ブロック170の開口端部170a近傍に配置されている。
図54及び図55は吸入流路ブロック170の吸入流路の要部を示す断面図であり、吸入流路内には流路切り換え機構171が配設されている。流路切り換え機構171は設定温度を境にして、吸入流路を切り換えるよう機能を有し、バイメタル、形状記憶合金あるいは高負荷状態を検知して流路を切り換える弁等により構成されている。
次に、上記のように構成された実施例19の密閉型圧縮機について、その動作を説明する。
一般に低外気温時では、冷凍冷蔵装置は大きな冷凍能力を必要としない。しかし、このような状況において密閉型圧縮機により必要以上の冷媒循環量が供給されると、吸入圧力の低下、吐出圧力の上昇が起こる。この結果、密閉型圧縮機を含む冷凍システム全体の効率が低下し、結果的に総消費電力量が増加するという問題がある。
この問題を解決するために、低外気温時には、冷媒循環量を少なくすることにより、消費電力量は少なくすることができる。
実施例19の密閉型圧縮機は、高外気温時や高負荷時には各部温度が全体に高くなり、吸入流路ブロック170の吸入流路内に設けられている流路切り換え機構171の温度も高くなる。その場合、バイメタル、形状記憶合金あるいは高負荷状態を検知して流路を切り換える弁等の流路切り換え機構171は、図54に示される形状に配置されている。この時の吸入される冷媒ガスの流れは、図54におけるd→e→fの方向であり、吸入行程時に吸入孔150a付近で発生する圧力波は冷媒ガスの流れと逆方向に伝播する。その圧力波は、密閉容器2内の空間で位相の反転した反射波となり、冷媒ガスの流れと順方向に伝播し、吸入孔150aに戻ってくる。
吸入行程の間にこの反射波を吸入孔150aへ到達させることにより、吸入完了時点で反射波の持つ圧力エネルギーが冷媒ガスに付加され、冷媒ガスの吸入圧力が上昇する。
そのため、実施例19の密閉型圧縮機は、シリンダー10内にはより密度の高い冷媒ガスが充填されることになり、圧縮1行程当たりの吐出冷媒量が増加し、冷媒循環量が増加する。このため、実施例19の密閉型圧縮機は、大きな冷凍能力を必要とする高外気温時や高負荷時には従来の密閉型圧縮機と同様に冷凍能力を大幅に向上させることができる。
一方、通常運転時や低外気温時には各部温度が全体に低くなり、流路切り換え機構171の温度も低くなる。その場合、流路切り換え機構171が図55に示すように変形するため、吸入される冷媒ガスは図55に示すようにd→fの方向に流れる。このため、図55に示す冷媒ガスの流れは、図54に示したd→e→fの方向の流れに比べて短くなる。このため、図55に示す吸入流路の長さでは、反射波が吸入孔150aに戻るタイミングが早くなり過ぎて、吸入完了時点では反射波の持つ圧力エネルギーが冷媒ガスに付加されず、過給効果は得られないことになる。
逆に吸入流路ブロック170の吸入流路の長さが長い場合には、反射波が吸入孔150aに戻るタイミングが遅くなり過ぎて、吸入完了時点では反射波の持つ圧力エネルギーが冷媒ガスに付加されず、過給効果は得られないことになる。
このように、本発明の実施例19の密閉型圧縮機は、高外気温時や高負荷時のみ過給効果が得られるように吸入流路の長さ等が調整されている。このため、本発明の実施例19の密閉型圧縮機は、高外気温時や高負荷時以外は必要以上の冷凍能力が発生しなくなり、総合的に消費電力量を少なくすることができる。
本発明の実施例19の密閉型圧縮機は、吸入流路ブロック170における吸入流路の密閉容器2内の開口端部171aを吸入パイプ161の密閉容器2内の開口端部の近傍に設けている。これにより、実施例19の密閉型圧縮機は、吸入流路ブロック170の吸入流路に吸入される冷媒ガスが密閉容器2内の圧縮発熱、電動機発熱、摺動発熱等の影響で高温となっている電動圧縮要素81から受ける熱の影響を少なくすることができ、温度上昇を少なくすることができる。
従って、実施例19の密閉型圧縮機は、吸入流路内の冷媒ガスの密度を高め、冷媒循環量を増加させることができ、効率を高くすることができる。
以上のように、実施例19の密閉型圧縮機は、密閉容器2と、密閉容器2内に収納され圧縮要素300及び電動機等のモータ部7により構成される電動圧縮要素81と、圧縮要素300を構成するシリンダー10と、吸入孔150aを有しシリンダー10の端面に配設されたバルブプレート150と、一端が密閉容器2外に連通し他端が密閉容器2内に開口した吸入パイプ161と、一端が吸入パイプ161の密閉容器2内の開口端部の近傍に開口し、他端がバルブプレート150の吸入孔150aにほぼ直結する吸入流路と、吸入流路に備えられた流路切り換え機構171とを具備している。
このため、実施例19の密閉型圧縮機は、電動圧縮要素81に高負荷がかかる高外気温時や高負荷時にのみ過給効果が得られるように構成されている。実施例19の密閉型圧縮機は、総合的に消費電力量を少なくすることができる。
実施例19の密閉型圧縮機は、吸入される冷媒ガスの温度上昇を小さくすることにより、冷媒ガスの密度を高め、冷媒循環量を増加させることにより効率を高くすることができる。
なお、実施例19において、吸入流路がバルブプレート150の吸入孔150aにほぼ直結した構成とした。しかし、わずかな空間(実質的に同じ断面形状を有する流路空間)を介して吸入流路とバルブプレート150の吸入孔150aとを連結する構成であっても上記実施例19とほぼ同等の効果が得られる。
実施例19において、吸入流路を図52から図55に示すように吸入流路ブロックに吸入流路を形成したもので説明したが、例えば吸入流路を管により構成したものでも上記実施例19と同等の効果が得られる。
《実施例20》
次に、本発明の密閉型圧縮機の一例である実施例20について添付の図を用いて説明する。
図56は本発明の実施例20による密閉型圧縮機を示す平面断面図である。図57は実施例20の密閉型圧縮機の概略構造と冷凍装置の制御ブロック図である。図58はインバータ装置を用いて実施例20の密閉型圧縮機の回転数制御時の冷凍能力変化を示す特性図である。
なお、実施例20の密閉型圧縮機において、前述の各実施例の密閉型圧縮機と同じ機能、構成を有するものには同じ符号を付して、その説明は省略する。
図56及び図57において、第1の吸入パイプ193はその一端が密閉容器2内の空間に開口し、他端がバルブプレート150の吸入孔150aにほぼ直結された吸入流路としての吸入管である。図57に示すインバータ装置212は、電動機211を少なくとも2種類以上の特定周波数で運転する。
次に、上記のように構成された実施例20の密閉型圧縮機について、その動作を説明する。
一般に低外気温時では、冷凍冷蔵装置は大きな冷凍能力を必要としない。しかし、このような状況において、従来の密閉型圧縮機により必要以上の冷媒循環量が供給されると、吸入圧力の低下、吐出圧力の上昇が起こる。この結果、従来の密閉型圧縮機を含む冷凍システム全体の効率が低下し、結果的に総消費電力量が増加するという問題がある。
この問題を解決するために、低外気温時には、冷媒循環量を少なくすることにより、消費電力量は少なくすることができる。
実施例20の密閉型圧縮機は、吸入行程時に吸入孔150a付近で発生した圧力波は、冷媒ガスの流れと逆方向に伝播する。そして、圧力波は、密閉容器2内の空間で位相の反転した反射波となり、冷媒ガスの流れと順方向に伝播し、吸入孔150aに戻ってくる。
吸入行程の間にこの反射波を吸入孔150aへ到達させることにより、吸入完了時点で反射波の持つ圧力エネルギーが冷媒ガスに付加され、冷媒ガスの吸入圧力が上昇する。
そのため、実施例20の密閉型圧縮機は、シリンダー10内に、より密度の高い冷媒ガスが充填されることになる。このため、実施例20の密閉型圧縮機は、圧縮1行程当たりの吐出冷媒量が増加し、冷媒循環量が増加する。このような過給効果により、実施例20の密閉型圧縮機は、冷凍能力を大幅に向上させることができる。
次に、図58を用いて過給効果について具体例について説明する。図58はインバータ装置を用いて密閉型圧縮機を回転数制御したときの冷凍能力変化を示す特性図である。図58において、横軸は回転数(r/s)を示し、縦軸は冷凍能力相対値を示す。冷凍能力相対値は従来の密閉型圧縮機の回転数が60Hzのときを基準としている。図58において、実線は従来の密閉型圧縮機を回転数制御した場合である。破線▲1▼と破線▲2▼は実施例20における気筒容積の異なる密閉型圧縮機をそれぞれ回転数制御した場合である。なお、図58において1点鎖線は回転数の増加とともに冷凍能力も比例して増加する場合を示す。
回転数制御を行う従来の往復型の密閉型圧縮機を用いて、周波数60Hzの運転時に過給効果が得られるように構成した場合、冷凍能力変化は図11の破線▲1▼のように変化する。
図11の実線に示すように、従来の密閉型圧縮機では回転数が50Hzを越える高速回転数時において、回転数の増加に比例した冷凍能力がバルブ機構の追従性等の問題で得られず、冷凍能力が飽和し、更に低下するという特性を有していた。
しかし、実施例20の密閉型圧縮機によると、過給により高速側の回転数である60Hzの近傍で冷凍能力が従来の装置に比べて大幅に向上しており、同じ60Hz運転において約2割の能力上昇が見られた。図58の破線▲1▼に示すように、実施例20の密閉型圧縮機は回転数の増加に比例して冷凍能力が得られると想定した場合における70Hz運転のときと同等の冷凍能力を確保できた。
また、図58に示すように、60Hz運転時における従来の装置と同じ冷凍能力は、破線▲2▼で示す約2割小さい気筒容積の実施例20の密閉型圧縮機により得られた。
このように、実施例20の密閉型圧縮機によれば、冷凍能力の範囲を広くすることができ、外気温や負荷に応じた冷凍能力が得られるように構成できる。更に、図58の破線▲2▼で示すように、従来より小さい気筒容積の密閉型圧縮機により、従来のものとほぼ同等の冷凍能力が得られるように構成でき、密閉型圧縮機の小型化が達成できる。
これにより、実施例20の密閉型圧縮機によると、回転数制御に加えて過給を行うことにより、外気温や負荷に応じた冷凍能力が得られ、消費電力量を少なくすることができる。
以上のように、実施例20の密閉型圧縮機は、密閉容器2と、密閉容器2内に収納され圧縮要素300及び電動機211により構成される電動圧縮要素81と、圧縮要素300を構成するシリンダー10と、吸入孔150aを有するバルブプレート150と、一端が密閉容器1内あるいはアキュムレータ等の空間に開口し他端が吸入孔150aに実質的に直結する第1の吸入パイプ193と、電動機211を運転するインバータ装置212とから構成されている。このため、実施例20の密閉型圧縮機は、外気温や負荷に応じた冷凍能力が得られ、消費電力量を少なくすることができる。
なお、実施例20の密閉型圧縮機は、ロータリ型や、スクロール型圧縮機などでも上記実施例20と同様の効果が得られることは言うまでもない。
実施例20において、吸入流路として吸入パイプを用いて構成したが、吸入流路を有するブロック状のもので構成したものでも上記実施例20と同等の効果が得られる。
《実施例21》
次に、本発明の密閉型圧縮機の一例である実施例21について添付の図を用いて説明する。
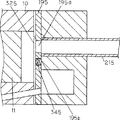
図59は本発明の実施例21による密閉型圧縮機の平面断面図である。図60は図59のB−B線における正面断面図である。図61は実施例21の密閉型圧縮機の吸入流路付近を示す断面図である。
なお、実施例21の密閉型圧縮機において、前述の各実施例の密閉型圧縮機と同じ機能、構成を有するものには同じ符号を付して、その説明は省略する。
図59、図60及び図61において、吸入ブロック227に形成された吸入流路222は一端が開口端部として密閉容器2内の空間に配置され、他端がバルブプレート192の吸入孔192aに実質的に直結されている。図61に示すように、吸入流路222とともに吸入ブロック227内に形成されている共鳴型マフラー232は、空胴部242と結合部252とを有している。共鳴型マフラー232の結合部252は、その一端が空胴部242に開口し、他端が吸入流路222に開口している。共鳴型マフラー232の共振周波数は、吸入される冷媒ガスの脈動等により吸入孔192a付近で発生する騒音のうち最も問題となる騒音の周波数と一致するように、空胴部242の容積、結合部252の長さ、結合部252の断面積等が調整されている。
次に、上記のように構成された実施例21の密閉型圧縮機について、その動作を説明する。
冷媒ガスがシリンダー10内に吸入されると、冷媒ガスの脈動やサクションリードの動作により吸入孔192a付近で騒音が発生する。この発生した騒音は吸入流路222を伝達する際、吸入流路222に設けられた共鳴型マフラー232によって減衰される。そのため、吸入流路222から密閉容器2内の空間に伝達する騒音は小さくなり、密閉型圧縮機から生じる騒音を小さくすることができる。
次に、実施例21における共鳴型マフラー232が冷凍能力を向上させる効果、すなわち過給効果に与える影響について説明する。
前述の背景技術において説明した従来の密閉型圧縮機において、吸入流路からの騒音で最も問題となる周波数は通常400Hzから600Hz程度である。それに対し、吸入行程時に発生して過給効果を与える圧力波の周波数はかなり小さい。また、共鳴型のマフラーは、一般に共振周波数付近の狭い周波数帯域だけの消音効果が大きいという特徴がある。
従って、上記実施例21において、吸入行程時に発生した圧力波(膨張波)が反射波(圧縮波)となり、吸入孔192aに戻ってくる過程において、共鳴型マフラー232は問題となる騒音だけを減衰させて、過給効果を与える圧力波に対してはほとんど影響を与えないため、大きな冷凍能力は共鳴型マフラー232が設置されていないものと同じように得られる。
このように、過給効果を与える仕様の密閉型圧縮機においては、吸入流路222に共鳴型マフラー232を設ける構成は非常に有効であり、過給効果と騒音低減を両立することができる。
以上のように、本実施例21の密閉型圧縮機は、一端が密閉容器2内の空間に開口し、他端が吸入孔192aにほぼ直結する吸入流路222と、吸入流路222に設けられた共鳴型マフラー232とから構成されている。このため、大きな冷凍能力は従来通り得られ、さらに吸入された冷媒ガスの脈動に伴い発生する騒音は吸入流路222に設けた共鳴型マフラー232により減衰され、吸入流路222から密閉容器2内に伝達する騒音は小さくなる。
このため、実施例21の密閉型圧縮機は、最終的に密閉容器外に伝達する騒音を小さくすることができる。
なお、実施例21において、共鳴型マフラー232は空胴部242と結合部252とを有する構成にしたが、空胴部が吸入流路222に直接接続した形状のもの、いわゆるサイドブランチ形や、その他の形状であっても共鳴型マフラー形状であれば、上記実施例21と同様の効果が得られる。
《実施例22》
次に、本発明の密閉型圧縮機の一例である実施例22について添付の図を用いて説明する。
図62は本発明の実施例22による密閉型圧縮機のシリンダー付近を示す断面図である。
なお、実施例22の密閉型圧縮機において、前述の各実施例の密閉型圧縮機と同じ機能、構成を有するものには同じ符号を付して、その説明は省略する。
図62において、吸入孔273を有するバルブプレート263はシリンダー10の端面に固着されている。吸入流路283はその一端が開口端部として密閉容器2内の空間に配置されている、他端が前記吸入孔273に実質的に直結している。
バルブプレート263にはサクションリード293が取り付けられており、吸入孔273の開閉を行っている。
図62に示すように、吸入孔273に対する吸入流路283の接続部分における流路の軸方向は、バルブプレート263の端面に対して直角とならないように傾斜して構成されている。
次に、上記のように構成された実施例22の密閉型圧縮機について、その動作を説明する。
まず、背景技術において説明した図71に示した従来の密閉型圧縮機の場合について説明する。図71において、吸入行程時に発生した圧力波(膨張波)は、密閉容器2内の空間で位相の反転した反射波Wb(圧縮波)となり、吸入孔19aに戻ってくる。しかし、図71に示すように、反射波Wbの進む方向に対してサクションリード20の開閉面は垂直に近い角度であるため、反射波Wbの多くはサクションリード20においてほぼ反対の方向に反射される。このため、従来の密閉型圧縮機においては、シリンダー10内に反射波Wbの圧力エネルギーが有効に働かず、過給効果が十分に得られないという問題があった。
それに対し、図62に示す本発明の実施例22の密閉型圧縮機は、吸入流路273がバルブプレート263の端面に対して垂直ではなく傾斜して接続している。このため、図62に示すように、反射波Wcはサクションリード293において反射されることなく直接シリンダー10内に入る。また、反射波Wdは、サクションリード293に反射される場合でも、反射波Wdの進む方向とサクションリード293の開閉面との角度が小さいため、図62に示すように、反射後の反射波Wdの進む向きは大きく変わらず、シリンダー10内に入りやすくなる。
以上のように、実施例22の密閉型圧縮機においては、反射波がサクションリード293によって妨害されにくい構成であるため、シリンダー10内に反射波の圧力エネルギーが有効に入るようになり、実施例22の密閉型圧縮機は大きな冷凍能力を有する。
吸入される冷媒ガスの進む方向とサクションリード293の開閉面とのなす角度は小さいため、サクションリード293による冷媒ガスの流れの抵抗も小さくなり、圧力損失が減少する。このため、さらに実施例22の密閉型圧縮機は優れた冷凍効率を有し、高い冷凍能力を有する。
以上のように、実施例22の密閉型圧縮機は、吸入孔273への吸入流路283の接続部分の流路の軸方向がバルブプレート263の端面に対して垂直とならないように傾斜して構成されている。このため、実施例22の密閉型圧縮機は、反射波がシリンダー10内に戻るとき、反射波はサクションリード293に反射されずに直接シリンダー10内に入りやすい構成である。また、反射波がサクションリード293に反射される場合でも、反射波の進む方向とサクションリード293の開閉面とのなす角度は小さくなる。このため、反射後の反射波の進む向きは大きく変わらず、反射波はシリンダー10内に入りやすくなる。すなわち、反射波はサクションリード293によって妨害されにくくなり、シリンダー10内に反射波の圧力エネルギーが有効に入るようになる。このため、実施例22の密閉型圧縮機は優れた冷凍効率を有し、高い冷凍能力を有する。
サクションリード293による吸入された冷媒ガスの流れの抵抗が小さく、圧力損失が小さい。このため、実施例22の密閉型圧縮機はさらに高い冷凍能力を有する。
《実施例23》
次に、本発明の密閉型圧縮機の一例である実施例23について添付の図を用いて説明する。
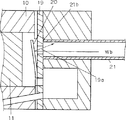
図63は本発明の実施例23による密閉型圧縮機の低外気温時の停止時におけるシリンダー付近を示す断面図である。図64は本発明の実施例23による密閉型圧縮機の高外気温時の停止時におけるシリンダー付近を示す断面図である。
なお、実施例23の密閉型圧縮機において、前述の各実施例の密閉型圧縮機と同じ機能、構成を有するものには同じ符号を付して、その説明は省略する。
図63及び図64において、シリンダー10の端面とバルブプレート194との間にサクションリード304が設けられている。このサクションリード304はバルブプレート194の吸入孔194aの開閉を行うよう構成されている。サクションリード304にはサクションリード304の初期たわみ量を制御するたわみ制御機構314が取り付けられている。実施例23において、たわみ制御機構314は、サクションリード304より線膨張係数の小さい材料により形成されており、サクションリード304のピストン側に固定されている。
次に、上記のように構成された実施例23の密閉型圧縮機について、その動作を説明する。
一般に低外気温時では、冷凍冷蔵装置は大きな冷凍能力を必要としない。しかし、このような状況において従来の密閉型圧縮機により必要以上の冷媒循環量が供給されると、吸入圧力の低下、吐出圧力の上昇が起こる。この結果、従来の密閉型圧縮機を含む冷凍システム全体の効率が低下し、結果的に総消費電力量が増加するという問題がある。
この問題を解決するために、低外気温時には、冷媒循環量を少なくすることにより、消費電力量は少なくすることができる。
実施例23の密閉型圧縮機は、低外気温時には各部温度も全体に低くなり、サクションリード304とたわみ制御機構314の温度も低くなっている。その場合、停止時におけるサクションリード304は、図63に示すように、吸入孔194aを閉じる状態、すなわちサクションリード304の初期たわみが0の状態となっている。この状態においては、吸入孔194が開いてから閉じるまでの時間は、初期たわみがある場合に比べて短くなるとともに、サクションリード304の変位量も小さくなる。そのため、吸入行程時に発生した圧力波が反射波となって吸入孔194に戻ってきたとき、シリンダー10内に吸入される冷媒ガスの量はやや少なくなり、過給による冷媒循環量の向上効果は小さくなる。従って、実施例23の密閉型圧縮機は、低外気温時においては消費電力量を小さく抑えることができる。
高外気温時ではサクションリード304とたわみ制御機構314の温度も高くなり、サクションリード304よりたわみ制御機構314の方が線膨張係数が小さいため、温度上昇による材料の膨張率に差が生じてバイメタルの様に働く。その結果、停止時におけるサクションリード304は、図64に示すように、吸入孔194aを開ける状態、すなわちサクションリード304の初期たわみがある状態となっている。この状態においては、吸入孔194aが開いてから閉じるまでの時間は、初期たわみが0の場合に比べて長くなるとともに、サクションリード304の変位量も大きくなる。そのため、吸入行程時に発生した圧力波が反射波となって吸入孔194aに戻ってきたとき、シリンダー10内に吸入される冷媒ガスの量は多くなり、過給による冷媒循環量の向上効果は十分に得られる。従って、実施例23の密閉型圧縮機は、大きな冷凍能力が必要となる高外気温時に、過給効果による十分な冷凍能力の向上効果が得られる。
以上のように、実施例23の密閉型圧縮機は、サクションリード304の初期たわみ量を制御するたわみ制御機構314がサクションリード304より線膨張係数の小さい材料により形成され、サクションリード304のピストン側に固定されている。このため、実施例23の密閉型圧縮機は、大きな冷凍能力を必要としない低外気温時には冷凍能力の向上効果が小さくなって消費電力量を小さく抑え、一方大きな冷凍能力を必要とする高外気温時には十分な冷凍能力向上効果が得られるように構成している。このため、実施例23の密閉型圧縮機においては、冷凍能力制御をすることにより総消費電力量を小さくすることができる。
なお、実施例23において、たわみ制御機構314はサクションリード304より線膨張係数の小さい材料により形成し、サクションリード304のピストン側に固定するように構成した。しかし、たわみ制御機構314はサクションリード304より線膨張係数の大きい材料で、サクションリード304の反ピストン側に固定しても、上記実施例23と同様の効果が得られる。
《実施例24》
次に、本発明の密閉型圧縮機の一例である実施例24について添付の図を用いて説明する。
図65は本発明の実施例24による密閉型圧縮機の低外気温時の停止時におけるシリンダー付近を示す断面図である。図66は本発明の実施例24による密閉型圧縮機の高外気温時の停止時におけるシリンダー付近を示す断面図である。
なお、実施例24の密閉型圧縮機において、前述の各実施例の密閉型圧縮機と同じ機能、構成を有するものには同じ符号を付して、その説明は省略する。
図65及び図66において、シリンダー10の端面とバルブプレート195との間にサクションリード325が設けられている。サクションリード325はバルブプレート195の吸入孔195aの開閉を行うよう構成されている。実施例24にはサクションリード325の初期たわみ量を制御するたわみ制御機構345が取り付けられている。たわみ制御機構345はバイメタルあるいは形状記憶合金等の温度によって変形する材料により構成されており、バルブプレート195に形成された貫通孔195b内に配置されている。たわみ制御機構345は貫通孔195b内において伸縮自在に備え付けられている。
次に、上記のように構成された実施例24の密閉型圧縮機について、その動作を説明する。
一般に低外気温時では、冷凍冷蔵装置は大きな冷凍能力を必要としない。しかし、このような状況において従来の密閉型圧縮機により必要以上の冷媒循環量が供給されると、吸入圧力の低下、吐出圧力の上昇が起こる。その結果、従来の密閉型圧縮機を含む冷凍システム全体の効率が低下し、結果的に総消費電力量が増加するという問題がある。
この問題を解決するために、低外気温時には、冷媒循環量を少なくすることにより、消費電力量は少なくすることができる。
実施例24の密閉型圧縮機は、低外気温時には各部温度も全体に低くなり、たわみ制御機構345の温度も低くなっている。その場合、たわみ制御機構345はサクションリード325を押し上げることがなく、停止時におけるサクションリード325は、図65に示すように、吸入孔195aを閉じる状態、すなわちサクションリード325の初期たわみが0の状態となっている。この状態においては、吸入孔195aが開いてから閉じるまでの時間は、初期たわみがある場合に比べて短くなる。そのため、吸入行程時に発生した圧力波が反射波となって吸入孔195aに戻ってきたとき、シリンダー10内に吸入される冷媒ガスの量はやや少なくなり、過給による冷媒循環量の向上効果は小さくなる。従って、実施例24の密閉型圧縮機は、低外気温時においては消費電力量を小さく抑えることができる。
一方、高外気温時ではたわみ制御機構345の温度も高くなり、たわみ制御機構345は伸びて、サクションリード325を押し上げる。このため、停止時におけるサクションリード325は、図66に示すように、吸入孔195aを開ける状態、すなわちサクションリード325の初期たわみがある状態となっている。この状態における吸入孔195aが開いてから閉じるまでの時間は、初期たわみが0の場合に比べて長くなる。そのため、吸入行程時に発生した圧力波が反射波となって吸入孔195aに戻ってきたとき、シリンダー10内に吸入される冷媒ガスの量は多くなり、過給による冷媒循環量の向上効果は十分に得られる。
従って、実施例24の密閉型圧縮機は、大きな冷凍能力が必要となる高外気温時には、過給効果による十分な冷凍能力の向上効果が得られる。
以上のように、実施例24の密閉型圧縮機は、サクションリード325の初期たわみ量を制御するたわみ制御機構345がバイメタルあるいは形状記憶合金等の温度によって変形する材料により構成されており、バルブプレート195内に伸縮自在に備え付けられた構成となっている。このため、実施例24の密閉型圧縮機では、大きな冷凍能力を必要としない低外気温時には冷凍能力の向上効果が小さくなって消費電力量を小さく抑え、大きな冷凍能力を必要とする高外気温時には十分な冷凍能力向上効果が得られる。従って、実施例24の密閉型圧縮機は、冷凍能力制御をすることにより、総消費電力量を小さくすることができる。
産業上の利用可能性
本発明の密閉型圧縮機は、冷凍冷蔵装置等に使用されるものであり、冷媒ガスの吸入が完了する時点でのシリンダー内の圧力を冷凍サイクルの低圧側圧力よりも高めることにより、シリンダー内に吸い込まれる冷媒ガスの密度を高めて、高い冷凍能力を発揮するものであり、かつ、圧縮動作の吸入時に発生する共鳴音の発生を防止して、騒音の発生を抑制した静かな冷凍冷蔵装置等を構成するために用いられる。
Claims (6)
- 動力源であるモーター部と、
前記モーター部により駆動されるクランクシャフト、ピストン、シリンダー等の機械部と、
前記モーター部と前記機械部とを収納し、潤滑油を貯溜する密閉容器と、
前記シリンダーの端面に配設され、吸入孔を有するバルブプレートと、
一端が前記バルブプレートの前記吸入孔に実質的に直結され、他端が開口端部として前記密閉容器内空間に配置された吸入流路と、
を具備し、
前記開口端部が、
(1)前記密閉容器の水平断面にてその断面積が実質的に最大となる面の重心を通る第1の線分であり、かつ当該第1の線分が前記密閉容器の内壁面間の距離が最小となる位置にあり、前記第1の線分の中心点において前記第1の線分と実質的に直交する第1の平面、
(2)前記第1の線分を含む水平面において、前記第1の線分と実質的に直交する前記密閉容器の内壁面間の第2の線分の中心点を通り、かつ前記第2の線分と実質的に直交する第2の平面、又は
(3)前記密閉容器の鉛直方向における上方内壁面と前記潤滑油面との間の最大距離となる第3の線分の中心点を通り、かつ前記第3の線分と実質的に直交する第3の平面、
の3つの平面のうち少なくとも1つの平面上に配置される密閉型圧縮機であって、
前記密閉型圧縮機が、前記吸入孔の開閉を行うサクションリードを具備し、
前記サクションリードの開き始めのクランク角度をθs(rad)とし、前記吸入流路の長さをL(m)とし、前記クランクシャフトの回転数をf(Hz)とし、前記吸入流路内の冷媒ガスにおける音速をAs(m/sec)とし、吸入開始時に前記吸入孔において発生する圧力波の下記(式1)で示される戻りクランク角度θr(rad)が下記(式2)の範囲になるように構成された請求項1に記載の密閉型圧縮機。
θr=θs+4π×L×f/As ・・・・(式1)
1.4(rad)≦θr≦3.0(rad)・・・・(式2) - 吸入マフラーを具備し、吸入流路の一端が前記バルブプレートの前記吸入孔に実質的に直結され、他端が開口端部として前記マフラー内に配置された請求項1に記載の密閉型圧縮機。
- 前記吸入流路は、一端が前記バルブプレートの前記吸入孔に実質的に直結され、他端が開口端部として前記密閉容器内に配置された第1の吸入流路と、
前記第1の吸入流路の開口端部の近傍に配置された開口端部を有する第2の吸入流路と、を具備する請求項1又は2に記載の密閉型圧縮機。 - 前記第1の吸入流路の開口端部が、
(1)前記密閉容器の水平断面にてその断面積が実質的に最大となる面の重心を通る第1の線分であり、かつ当該第1の線分が前記密閉容器の内壁面間の距離が最小となる位置にあり、前記第1の線分の中心点において前記第1の線分と実質的に直交する第1の平面、
(2)前記第1の線分を含む水平面において、前記第1の線分と実質的に直交する前記密閉容器の内壁面間の第2の線分の中心点を通り、かつ前記第2の線分と実質的に直交する第2の平面、又は
(3)前記密閉容器の鉛直方向における上方内壁面と前記潤滑油面との間の最大距離となる第3の線分の中心点を通り、かつ前記第3の線分と実質的に直交する第3の平面、
の3つの平面のうち少なくとも1つの平面上に配置された請求項3に記載の密閉型圧縮機。 - 前記吸入孔の開閉を行うサクションリードと、
前記吸入流路に設けられた共鳴型マフラーと、を具備する請求項1に記載の密閉型圧縮機。 - 前記吸入孔の開閉を行うサクションリードを具備し、
前記吸入孔と前記吸入流路との直結部分における、吸入流路の軸方向が前記バルブプレートの接続面に対して90度より小さい角度となるように構成された請求項1に記載の密閉型圧縮機。
Applications Claiming Priority (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP15397396 | 1996-06-14 | ||
| JP28637696 | 1996-10-29 | ||
| JP29612396 | 1996-11-08 | ||
| JP2492597 | 1997-02-07 | ||
| JP2648897 | 1997-02-10 | ||
| JP9348397 | 1997-04-11 | ||
| JP12823197 | 1997-05-19 | ||
| PCT/JP1997/002058 WO1997047882A1 (fr) | 1996-06-14 | 1997-06-12 | Compresseur hermetique |
Related Child Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003422523A Division JP2004138074A (ja) | 1996-06-14 | 2003-12-19 | 密閉型電動圧縮機 |
| JP2003422525A Division JP2004092661A (ja) | 1996-06-14 | 2003-12-19 | 密閉型電動圧縮機 |
| JP2003422524A Division JP3652361B2 (ja) | 1996-06-14 | 2003-12-19 | 密閉型電動圧縮機 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP4055828B2 true JP4055828B2 (ja) | 2008-03-05 |
Family
ID=27564046
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP53875297A Expired - Fee Related JP4055828B2 (ja) | 1996-06-14 | 1997-06-12 | 密閉型圧縮機 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US6152703A (ja) |
| EP (2) | EP0845595B1 (ja) |
| JP (1) | JP4055828B2 (ja) |
| KR (1) | KR100277283B1 (ja) |
| CN (2) | CN1519473A (ja) |
| BR (1) | BR9702316A (ja) |
| DE (2) | DE69738038T2 (ja) |
| WO (1) | WO1997047882A1 (ja) |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| BR0117028B1 (pt) * | 2001-05-25 | 2012-02-07 | válvula de sucção para compressor com movimento de vaivém. | |
| KR100504445B1 (ko) * | 2003-03-05 | 2005-08-01 | 삼성광주전자 주식회사 | 압축기용 실린더 조립체, 압축기 및 압축기가 적용된냉매순환회로를 가지는 장치 |
| JP2004360686A (ja) * | 2003-05-12 | 2004-12-24 | Matsushita Electric Ind Co Ltd | 冷媒圧縮機 |
| US6935848B2 (en) * | 2003-05-19 | 2005-08-30 | Bristol Compressors, Inc. | Discharge muffler placement in a compressor |
| US20040234386A1 (en) * | 2003-05-19 | 2004-11-25 | Chumley Eugene Karl | Discharge muffler having an internal pressure relief valve |
| US20060280617A1 (en) * | 2003-09-30 | 2006-12-14 | Katsumi Uehara | Compressor and suction valve structure |
| JP2005133707A (ja) * | 2003-10-10 | 2005-05-26 | Matsushita Electric Ind Co Ltd | 密閉型圧縮機 |
| KR100564439B1 (ko) * | 2003-11-14 | 2006-03-29 | 엘지전자 주식회사 | 밀폐형압축기 |
| JP4429769B2 (ja) * | 2004-03-16 | 2010-03-10 | パナソニック株式会社 | 密閉型圧縮機 |
| JP4576944B2 (ja) * | 2004-09-13 | 2010-11-10 | パナソニック株式会社 | 冷媒圧縮機 |
| EP1715189B1 (de) * | 2005-04-22 | 2013-12-04 | Kaeser Kompressoren AG | Schalldämpfer ausgebildet und bestimmt für einen Kompressor |
| TR200800419T1 (tr) * | 2005-08-05 | 2008-07-21 | Arçeli̇k Anoni̇m Şi̇rketi̇ | Bir kompresör |
| KR20080045558A (ko) * | 2006-11-20 | 2008-05-23 | 삼성광주전자 주식회사 | 밀폐형 압축기 |
| US20080253900A1 (en) * | 2007-04-11 | 2008-10-16 | Harris Ralph E | Gas compressor with pulsation absorber for reducing cylinder nozzle resonant pulsation |
| US8123498B2 (en) | 2008-01-24 | 2012-02-28 | Southern Gas Association Gas Machinery Research Council | Tunable choke tube for pulsation control device used with gas compressor |
| KR101457703B1 (ko) * | 2008-10-28 | 2014-11-04 | 엘지전자 주식회사 | 압축기 |
| US8591208B2 (en) * | 2009-06-24 | 2013-11-26 | Southwest Research Institute | Multi-frequency pulsation absorber at cylinder valve cap |
| BR112014008004A2 (pt) * | 2011-10-03 | 2017-04-11 | Arcelik As | compressor compreendendo um elemento de proteção |
| ITCO20110070A1 (it) * | 2011-12-20 | 2013-06-21 | Nuovo Pignone Spa | Metodi e dispositivi per usare costruttivamente le pulsazioni di pressione in installazioni di compressori alternativi |
| BR102014007254A2 (pt) * | 2014-03-26 | 2015-12-08 | Whirlpool Sa | dispositivo seletor de fluidos para compressor alternativo e filtro acústico provido de dispositivo seletor de fluidos |
| CN105332889A (zh) * | 2015-10-26 | 2016-02-17 | 无锡市圣科不锈钢气动自控阀门厂 | 一种往复式压缩机 |
| CZ31461U1 (cs) * | 2017-11-14 | 2018-02-13 | Industrial Technology s.r.o. | Zařízení pro eliminaci šíření hluku |
Family Cites Families (47)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE976269C (de) * | 1942-04-03 | 1963-06-06 | Kloeckner Humboldt Deutz Ag | Verdichter, insbesondere zum Spuelen oder Aufladen von Brennkraftmaschinen |
| GB627074A (en) * | 1946-01-26 | 1949-07-27 | Fluor Corp | Improvements in or relating to manifold devices for dampening pressure pulsations ingaseous currents |
| CH354540A (fr) * | 1958-02-14 | 1961-05-31 | Chausson Usines Sa | Dispositif d'insonorisation d'un compresseur à organe moteur oscillant à commande électromagnétique |
| GB880192A (en) * | 1960-02-11 | 1961-10-18 | Wilhelm Sydow Everett | Fluid surge alleviator |
| GB1320324A (en) * | 1969-09-05 | 1973-06-13 | Edwards High Vacuum Int Ltd | Silencers for vacuum pumps |
| JPS5123925Y2 (ja) * | 1971-04-15 | 1976-06-19 | ||
| GB1412404A (en) * | 1971-09-10 | 1975-11-05 | Quietflo Eng Ltd | Silencing devices for compressors |
| US3864064A (en) * | 1973-03-12 | 1975-02-04 | Sundstrand Corp | Suction muffler tube for compressor |
| JPS53130509A (en) * | 1977-04-20 | 1978-11-14 | Hitachi Ltd | Totally-enclosed motor compressor |
| US4239461A (en) * | 1978-11-06 | 1980-12-16 | Copeland Corporation | Compressor induction system |
| JPS55165978U (ja) * | 1979-05-16 | 1980-11-28 | ||
| DE2951463A1 (de) * | 1979-12-20 | 1981-07-02 | Copeland Corp., Sidney, Ohio | Kompressoransaugsystem |
| JPS606629Y2 (ja) * | 1980-05-16 | 1985-03-02 | 三洋電機株式会社 | 密閉型圧縮機 |
| JPS57122192A (en) * | 1981-01-20 | 1982-07-29 | Mitsubishi Electric Corp | Rotary compressor |
| US4401418B1 (en) * | 1981-04-29 | 1998-01-06 | White Consolidated Ind Inc | Muffler system for refrigeration compressor |
| US4477229A (en) * | 1982-08-25 | 1984-10-16 | Carrier Corporation | Compressor assembly and method of attaching a suction muffler thereto |
| JPS6026290U (ja) * | 1983-07-29 | 1985-02-22 | 株式会社東芝 | 密閉型圧縮機 |
| JPS60125790A (ja) * | 1983-12-13 | 1985-07-05 | Sanyo Electric Co Ltd | 電動圧縮機の防振装置 |
| US4549857A (en) * | 1984-08-03 | 1985-10-29 | Carrier Corporation | Hermetic motor compressor having a suction inlet and seal |
| JPS61132782A (ja) * | 1984-11-29 | 1986-06-20 | Toshiba Corp | 圧縮機のバルブカバ−の製造方法 |
| JPS61178581A (ja) * | 1985-02-05 | 1986-08-11 | Matsushita Refrig Co | 往復型圧縮機 |
| JPS6245388U (ja) * | 1985-09-10 | 1987-03-19 | ||
| JPH0415993Y2 (ja) * | 1985-12-18 | 1992-04-09 | ||
| US4856286A (en) * | 1987-12-02 | 1989-08-15 | American Standard Inc. | Refrigeration compressor driven by a DC motor |
| DD266402A1 (de) * | 1987-12-11 | 1989-03-29 | Dkk Scharfenstein Veb | Zylindertraeger fuer hermetische kaeltemittelverdichter |
| JPH03175177A (ja) * | 1989-12-05 | 1991-07-30 | Matsushita Refrig Co Ltd | 密閉型電動圧縮機 |
| US4988269A (en) * | 1990-02-08 | 1991-01-29 | Copeland Corporation | Compressor discharge gas sound attenuation |
| US5203178A (en) * | 1990-10-30 | 1993-04-20 | Norm Pacific Automation Corp. | Noise control of air conditioner |
| JPH04191476A (ja) * | 1990-11-22 | 1992-07-09 | Matsushita Refrig Co Ltd | 密閉型電動圧縮機 |
| US5288212A (en) * | 1990-12-12 | 1994-02-22 | Goldstar Co., Ltd. | Cylinder head of hermetic reciprocating compressor |
| DE69201580T2 (de) * | 1991-03-28 | 1995-07-06 | Tecumseh Products Co | Integriertes Ansaugsystem. |
| BR9102288A (pt) * | 1991-05-28 | 1993-01-05 | Brasileira S A Embraco Empresa | Conjunto abafador de succao para compressor hermetico |
| DE9203857U1 (de) * | 1992-03-23 | 1992-05-14 | ABB Patent GmbH, 6800 Mannheim | Kälteanlage |
| US5183974A (en) * | 1992-04-03 | 1993-02-02 | General Motors Corporation | Gas pulsation attenuator for automotive air conditioning compressor |
| JP3040250B2 (ja) * | 1992-04-06 | 2000-05-15 | 松下冷機株式会社 | 密閉型圧縮機 |
| JPH0650262A (ja) * | 1992-07-31 | 1994-02-22 | Matsushita Refrig Co Ltd | 往復型圧縮機 |
| JPH0674154A (ja) * | 1992-08-26 | 1994-03-15 | Matsushita Refrig Co Ltd | 密閉型圧縮機 |
| US5328338A (en) * | 1993-03-01 | 1994-07-12 | Sanyo Electric Co., Ltd. | Hermetically sealed electric motor compressor |
| KR200141490Y1 (ko) * | 1993-04-24 | 1999-05-15 | 김광호 | 압축기의소음감쇠장치 |
| WO1994028305A1 (fr) * | 1993-05-21 | 1994-12-08 | Kabushiki Kaisha Toyoda Jidoshokki Seisakusho | Compresseur a piston |
| DE4321013C5 (de) * | 1993-06-24 | 2014-07-17 | Wabco Gmbh | Gasverdichter |
| JPH0763167A (ja) * | 1993-08-20 | 1995-03-07 | Tokico Ltd | 多段式圧縮機 |
| JPH07208334A (ja) * | 1994-01-24 | 1995-08-08 | Matsushita Refrig Co Ltd | 密閉型圧縮機 |
| JPH07293468A (ja) * | 1994-04-28 | 1995-11-07 | Toshiba Corp | 密閉形コンプレッサ |
| KR0143182B1 (ko) * | 1994-04-29 | 1998-08-01 | 김광호 | 압축기 |
| GB9410609D0 (en) * | 1994-05-26 | 1994-07-13 | Secr Defence | Acoustic enclosure |
| US5496156A (en) * | 1994-09-22 | 1996-03-05 | Tecumseh Products Company | Suction muffler |
-
1997
- 1997-06-12 JP JP53875297A patent/JP4055828B2/ja not_active Expired - Fee Related
- 1997-06-12 US US09/011,672 patent/US6152703A/en not_active Expired - Lifetime
- 1997-06-12 KR KR1019980701059A patent/KR100277283B1/ko not_active IP Right Cessation
- 1997-06-12 WO PCT/JP1997/002058 patent/WO1997047882A1/ja active IP Right Grant
- 1997-06-12 DE DE69738038T patent/DE69738038T2/de not_active Expired - Fee Related
- 1997-06-12 EP EP97926251A patent/EP0845595B1/en not_active Expired - Lifetime
- 1997-06-12 EP EP05003059A patent/EP1538334B1/en not_active Expired - Lifetime
- 1997-06-12 DE DE69733402T patent/DE69733402T2/de not_active Expired - Fee Related
- 1997-06-12 BR BR9702316A patent/BR9702316A/pt not_active IP Right Cessation
- 1997-06-12 CN CNA2004100033158A patent/CN1519473A/zh active Pending
- 1997-06-12 CN CNB971907161A patent/CN1163668C/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| DE69738038D1 (de) | 2007-09-27 |
| KR100277283B1 (ko) | 2001-01-15 |
| WO1997047882A1 (fr) | 1997-12-18 |
| EP0845595B1 (en) | 2005-06-01 |
| EP0845595A1 (en) | 1998-06-03 |
| KR19990036390A (ko) | 1999-05-25 |
| DE69733402T2 (de) | 2006-04-27 |
| DE69738038T2 (de) | 2008-04-30 |
| CN1519473A (zh) | 2004-08-11 |
| CN1195392A (zh) | 1998-10-07 |
| EP0845595A4 (en) | 2001-03-21 |
| EP1538334B1 (en) | 2007-08-15 |
| EP1538334A1 (en) | 2005-06-08 |
| BR9702316A (pt) | 1999-03-09 |
| CN1163668C (zh) | 2004-08-25 |
| US6152703A (en) | 2000-11-28 |
| DE69733402D1 (de) | 2005-07-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4055828B2 (ja) | 密閉型圧縮機 | |
| JP3615145B2 (ja) | 消音器 | |
| KR20050059494A (ko) | 밀폐형 압축기 | |
| EP1413754B1 (en) | Closed compressor | |
| KR20070085071A (ko) | 밀폐형 압축기 | |
| JP2002202055A (ja) | 吐出マフラーを備えた圧縮機 | |
| JP4581354B2 (ja) | 密閉型圧縮機 | |
| JP4792675B2 (ja) | 密閉型圧縮機 | |
| JP2016020657A (ja) | ロータリ式圧縮機 | |
| JP3652361B2 (ja) | 密閉型電動圧縮機 | |
| US7150605B2 (en) | Reciprocating compressor | |
| JP2011027043A (ja) | 容積式圧縮機およびそれを用いた冷凍サイクル装置 | |
| JP2004092661A (ja) | 密閉型電動圧縮機 | |
| JP2004138074A (ja) | 密閉型電動圧縮機 | |
| US7588424B2 (en) | Linear compressor unit | |
| KR20030059614A (ko) | 왕복동식 압축기의 가변형 흡입 머플러 | |
| KR0184099B1 (ko) | 밀폐형 압축기의 토출소음기 | |
| JPH0650262A (ja) | 往復型圧縮機 | |
| KR100341420B1 (ko) | 저소음형 실린더 | |
| JPH0599141A (ja) | 密閉型電動圧縮機 | |
| JP2009079516A (ja) | 密閉型圧縮機 | |
| JP2000087854A (ja) | 密閉型圧縮機 | |
| KR0126732Y1 (ko) | 왕복동형 압축기 | |
| JPH11101181A (ja) | 密閉型電動圧縮機 | |
| KR19980076773A (ko) | 왕복동 압축기의 플랩퍼형 밸브조립체의 카버 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040527 |
|
| RD13 | Notification of appointment of power of sub attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7433 Effective date: 20040527 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070116 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070314 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20070314 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070717 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070911 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20071106 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20071204 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101221 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101221 Year of fee payment: 3 |
|
| R154 | Certificate of patent or utility model (reissue) |
Free format text: JAPANESE INTERMEDIATE CODE: R154 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101221 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101221 Year of fee payment: 3 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |