JP4020232B2 - 予ブレーキ制御装置 - Google Patents
予ブレーキ制御装置 Download PDFInfo
- Publication number
- JP4020232B2 JP4020232B2 JP25197199A JP25197199A JP4020232B2 JP 4020232 B2 JP4020232 B2 JP 4020232B2 JP 25197199 A JP25197199 A JP 25197199A JP 25197199 A JP25197199 A JP 25197199A JP 4020232 B2 JP4020232 B2 JP 4020232B2
- Authority
- JP
- Japan
- Prior art keywords
- brake
- preload
- vehicle
- braking
- state
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images









Description
この発明は、前方障害物を検知して、車両に自動制御過程のブレーキ圧を設定する予ブレーキ制御装置に関する。
【0002】
従来の予ブレーキ制御装置としては、例えば特開平7−144588号公報に記載の技術のように、前方障害物と自車との車間距離が所定の安全距離に満たない場合に追突を未然に防ぐ様に自動ブレーキ制御を行うようにしたものや、特開平6−24302号公報記載の技術のように、運転者の違いによるアクセル情報を踵止めに載せた運転者の足の踵を検出する踵検出手段等により検知して、ブレーキ操作前に予備制動を行うようにしたものがある。
【0003】
このような従来の予ブレーキ制御装置にあっては、緊急接近の状態における自動(予備)ブレーキの設定圧は、大きく設定するほうが空走距離の短縮や、運転者がブレーキを踏込んだ際の応答性の向上に効果があるものの、車間距離センサの精度により、同一線上の前方障害物以外の物を検出したり、運転者のアクセル開閉操作頻度が多い場合などには、不用意に自動ブレーキ制御が作動する可能性がある。この場合、自動ブレーキ制御により発生する減速度が運転者に違和感を与えることにもなりかねないという未解決の課題がある。
【0004】
そこで、本発明は、上記従来例の未解決の課題に着目してなされたものであり、自動制御過程においては、減速度を感じない程度の微小のブレーキ予圧を作動させることで車両の挙動を抑え、同一線上にない障害物を検知した場合に自動ブレーキ制御が行われたとしても、運転者に違和感を与えることなく、その後にブレーキ操作が行われた場合には、応答性のよいブレーキ制御を実現することができる予ブレーキ制御装置を提供することを目的としている。
【0005】
また、本発明は、上記微小のブレーキ予圧を作動させたときに、ブレーキ操作の緊急性を必要としない場合に、ブレーキ予圧をアクセルペダルの解放時からの経過時間に応じて減少させ、ある程度経過したら零にすることにより、不要な予ブレーキ制御の継続を抑制して運転者に違和感を与えることを防止することができる予ブレーキ制御装置を提供することを他の目的としている。
【0015】
【課題を解決するための手段】
上記目的を達成するために、請求項1に係る予ブレーキ制御装置は、車両前方の制動対象物に対する相対距離を検出する制動対象物検出手段と、該制動対象物検出手段で検出した制動対象物に対する相対距離に基づいてブレーキ予圧を必要とする要ブレーキ予圧状態であるか否かを判断する要ブレーキ予圧開始判断手段と、該要ブレーキ予圧開始判断手段で、要ブレーキ予圧状態であると判断されたときに、運転者のブレーキ操作が行われるまで車両走行状態に応じた微小ブレーキ予圧を発生させるブレーキ圧発生手段とを備え、前記ブレーキ圧発生手段は、発生させるブレーキ予圧を時間の経過に応じて常に減圧するように構成されていることを特徴としている。
この請求項1に係る発明においては、ブレーキ予圧を時間の経過とともに常に減圧することにより、アクセルペダルを解放して要ブレーキ予圧状態となっても、その後にブレーキペダルが踏込まれるまでの時間が長い場合には、緊急制動の可能性が少ないものと判断して、時間の経過とともに減圧して不必要な制動力の発生を抑制する。
【0016】
また、請求項2に係る予ブレーキ制御装置は、請求項1に係る発明において、前記ブレーキ圧発生手段は、発生させるブレーキ予圧を予圧開始時から時間の経過に伴って徐々に減圧するように構成されていることを特徴としている。
この請求項2に係る発明においては、ブレーキ予圧を予圧開始時から時間の経過に伴って徐々に減圧するので、運転者のブレーキ操作による緊急制動度合いに応じたブレーキ予圧制御を行うことができる。
【0017】
さらに、請求項3に係る予ブレーキ制御装置は、車両前方の制動対象物に対する相対距離を検出する制動対象物検出手段と、該制動対象物検出手段で検出した制動対象物に対する相対距離に基づいてブレーキ予圧を必要とする要ブレーキ予圧状態であるか否かを判断する要ブレーキ予圧開始判断手段と、該要ブレーキ予圧開始判断手段で、要ブレーキ予圧状態であると判断されたときに、運転者のブレーキ操作が行われるまで車両走行状態に応じた微小ブレーキ予圧を発生させるブレーキ圧発生手段とを備え、前記ブレーキ圧発生手段は、発生させるブレーキ予圧を予圧開始時から第1の所定時間が経過するまで当該予圧開始時に設定されたブレーキ予圧を維持し、当該第1の所定時間が経過したのちに時間の経過に応じて常に減圧するように構成されていることを特徴としている。
この請求項3に係る発明においては、ブレーキ予圧の予圧開始時即ちアクセルペダルの解放時点から第1の所定時間が経過するまでは設定されたブレーキ予圧を保持し、第1の所定時間が経過してからブレーキ予圧を徐々に減圧するようにしているので、緊急制動の可能性がある第1の所定時間が経過するまでは緊急制動に応じた応答性を確保することができ、その後緊急性が低下するに応じてブレーキ予圧が徐々に減圧される。
【0018】
さらにまた、請求項4に係る予ブレーキ制御装置は、請求項1乃至3の何れかに係る発明において、前記ブレーキ圧発生手段は、ブレーキ予圧を発生させてから第2の所定時間が経過したときにブレーキ予圧を解除するように構成されていることを特徴としている。
この請求項4に係る発明においては、ブレーキ予圧を発生させてから第2の所定時間が経過したときには運転者によるブレーキ操作の可能性が少ないものと判断してブレーキ予圧を解除する。
【0019】
なおさらに、請求項5に係る予ブレーキ制御装置は、請求項1乃至3の何れかに係る発明において、前記ブレーキ圧発生手段は、運転者の加速操作又は制動操作を検出したときに、ブレーキ予圧を解除するように構成されていることを特徴としている。
この請求項5に係る発明においては、運転者の加速操作又は制動操作を検出したときに、ブレーキ予圧を解除するので、運転者の意図する加速状態又は減速状態に移行することができる。
【0028】
【発明の効果】
請求項1に係る発明によれば、ブレーキ予圧を時間の経過とともに減圧することにより、アクセルペダルを解放して要ブレーキ予圧状態となっても、その後にブレーキペダルが踏込まれるまでの時間が長い場合には、緊急制動の可能性が少ないものと判断して、時間の経過とともに常に減圧して不必要な制動力の発生を抑制することができるという効果が得られる。
【0029】
また、請求項2に係る発明によれば、ブレーキ予圧を予圧開始時から時間の経過に伴って徐々に減圧するので、運転者のブレーキ操作による緊急制動度合いに応じたブレーキ予圧制御を行うことができるという効果が得られる。
さらに、請求項3に係る発明によれば、緊急制動の可能性がある第1の所定時間が経過するまでは緊急制動に応じた応答性を確保することができ、その後緊急性が低下するに応じてブレーキ予圧が徐々に減圧されるので、緊急制動の可能性に応じて最適なブレーキ予圧を発生させることができるという効果が得られる。
【0030】
さらにまた、請求項4に係る発明によれば、ブレーキ予圧を発生させてから第2の所定時間が経過したときには運転者によるブレーキ操作の可能性が少ないものと判断してブレーキ予圧を解除するので、運転者のブレーキ操作の可能性に応じた最適なブレーキ予圧を設定することができる。
さらに、請求項5に係る発明によれば、運転者の加速操作又は制動操作を検出したとき
に、ブレーキ予圧を解除するので、運転者の意図する加速状態又は減速状態に直ちに移行することができるという効果が得られる。
【0031】
【発明の実施の形態】
以下、本発明の実施の形態を図面に基づいて説明する。
図1は本発明の第1の実施形態を示すシステム構成図であり、図中、21FL,21FRは自動車の前輪、21RL,21RRは自動車の後輪であって、これら前輪21FL,21FR及び後輪21RL,21RRには夫々例えばディスクブレーキで構成されるブレーキアクチュエータ22FL,22FR及び22RL,22RRが装着されている。
【0032】
各ブレーキアクチュエータ22FL〜22RRの夫々は、供給される制動圧に応じた制動力を発生するように構成され、各ブレーキアクチュエータ22FL〜22RRがブレーキペダル23に電子式負圧ブースタ24を介して連結されたマスタシリンダ25に連結されている。
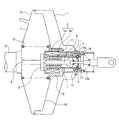
ここで、電子式負圧ブースタ24は、図2に示すように、変圧室1と負圧室2とがダイヤフラム14によって画成され、変圧室1はブレーキ非作動時はエンジン負圧によって定まる負圧状態となって、負圧室2と圧力釣り合い状態にあり、ブレーキ作動時には大気が導入され、負圧室2との差圧が生じて、マスタシリンダ25に倍力された荷重が伝達される。負圧室2は、エンジン始動中は常に所定の負圧に維持されている。
【0033】
そして、ダイヤフラム14の中央部には軸筒17が固定され、この軸筒17内に負圧室2と変圧室1とを連通する連通路11が形成され、この連通路11の右端側開口部に真空弁3が配設され、この真空弁3は運転者によってブレーキペダル23がストロークしたとき或いは電磁弁5が励磁されたときに閉じ、負圧室2と変圧室1との連通を遮断する。
【0034】
また、変圧室1と大気との間には大気弁4が配設され、この大気弁4は、後述する摺動筒体5bに形成された弁体12と協働して動作し、運転者によりブレーキペダル23がストロークしたとき或いは電磁弁5が励磁されたときに開き、変圧室1に大気が導入される。
電磁弁5は、軸筒17の内周部に配設されたソレノイド5aと、このソレノイド5aと対向して摺動自在に配設された摺動筒体5bとで構成され、摺動筒体5bの右端側に前述した真空弁3及び大気弁4を作動させる係合部18が形成されている。
【0035】
この摺動筒体5bは、負圧室2内に配設されたリターンスプリング15によって右方向に付勢されているとともに、内部には、オペレーティングロッド6が配設され、このオペレーティングロッド6の先端がプッシュロッド8を介してマスタシリンダ25に連結されている。
また、オペレーティングロッド6と軸筒17及び真空弁3,大気弁4との間に夫々リターンスプリング13a及び13bが配設されていると共に、オペレーティングロッド6と摺動筒体5bとの間にリターンスプリング16が配設されている。
【0036】
図1に戻って、オペレーティングロッド6には、プレーキペダル23が取付けられていると共に、このブレーキペダル23の踏込みを検出するブレーキスイッチ26が配設されている。
一方、アクセルペダル27には、そのストロークを検出するアクセルストロークセンサ28が配設されている。
【0037】
さらに、マスタシリンダ25の出力側配管にはブレーキ圧を検出するブレーキ圧センサ33が配設されている。
そして、電子式負圧ブースタ25の電磁弁5が制御装置29によって制御される。この制御装置29には、ブレーキスイッチ26、アクセルストロークセンサ28、ブレーキ圧センサ33の各検出信号が入力されると共に、例えば変速機の出力側に設けられた車速センサ30からの自車速V、車両前方のフロントグリルに配設されたレーザーレーダ、ミリ波レーダ等で構成される制動対象物検出手段としての車間距離センサ31からの車間距離L及びサスペンションと車体との間に介挿された荷重センサ32からの車体重量mが入力され、これらに基づいてブレーキ予圧を必要とする要ブレーキ予圧状態であるか否かを判断する判断距離L0を算出し、車間距離Lが判断距離L0以下となったときにブレーキ予圧Pstを設定し、制動圧センサ33で検出した制動圧がブレーキ予圧Pstと一致するように電磁弁5を制御する。ここで、荷重センサ32としては、ロードセンシングバルブを用いて、フロント及びリヤの輪荷重を計測して車体重量mを求めるように構成されている。
【0038】
次に、上記第1の実施形態の動作を制御装置29の処理手順を示す図3のフローチャートを伴って説明する。
制御装置29は、図3の制御処理を所定時間(例えば10msec)毎のタイマ割込処理として実行し、先ず、ステップ100で、ブレーキスイッチ26のスイッチ信号を読込み、これがオン状態であるか否かを判定し、オン状態であるときにはブレーキペダル23が踏込まれているものと判断してステップ102に移行し、車速センサ30から入力される自車速Vを読込み、これが“0”即ち停車中であるか否かを判定し、V=0である停車中であるときには、ステップ103に移行して、荷重センサ32で検出した車体重量mを読込んでからステップ110に移行し、V>0である走行中であるときには直接ステップ110に移行する。
【0039】
ステップ110では、ブレーキ予圧Pstを“0”に設定し、次いでステップ111に移行して、電磁弁5を非通電状態に制御してマスタシリンダ25で発生するブレーキ予圧を“0”としてからタイマ割込処理を終了して所定のメインプログラムに復帰する。
一方、ステップ100の判定結果が、ブレーキスイッチ26がオフ状態であるときには、ブレーキペダル23が解放されているものと判断して、ステップ101に移行し、車速センサ30で検出した自車速Vを読込み、次いでステップ104に移行して、車間距離センサ31で検出した現在の車間距離L(n) を読込むと共に、この現在の車間距離L(n) と前回読込んだ車間距離L(n-1) との偏差をタイマ割込周期Tで除算して車間距離変化量即ち車間距離の微分値dL/dtでなる相対速度dVを算出する。
【0040】
次いで、ステップ105に移行して、前方の自車両より遅い先行車、停止している先行車、道路上の障害物等の制動対象物に対する緊急接近時のブレーキ予圧を必要とする要ブレーキ予圧状態であるか否かを判断するための判断距離L0を下記(1)式に従って演算する。
L0={V2 −(V−dV)2 }/2×X×9.8 …………(1)
ここで、Xは緊急判断減速度(G)である。
【0041】
次いで、ステップ106に移行して、現在の車間距離L(n) が判断距離L0以下であるか否かを判定し、L(n) >L0であるときには要ブレーキ予圧状態ではないものと判断して前記ステップ110に移行し、L(n) ≦L0であるときには要ブレーキ予圧状態であると判断してステップ107に移行し、ブレーキ予圧開始車速V0を読込み、次いでステップ108に移行して、ブレーキ予圧開始車速V0と停車時に測定した車体重量mとに基づいて図4に示すブレーキ予圧算出マップを参照してブレーキ予圧Pstを算出してからステップ109に移行する。
【0042】
ここで、ブレーキ予圧算出マップは、図4に示すように、自車速Vと自動制御自のブレーキ圧Pstの設定値との関係を表し、要ブレーキ予圧状態となったときの自車速がVが高い程、ブレーキ圧は同じでも運転者が感じる減速度は小さく、低速時にはこの感じ方は大きいことを考慮して、特性曲線を低速部A1で一定の最小値Pminを持ち、高速部A3で一定の最大値Pmaxを持ち、中速部a2では最小値Pminと最大値Pmaxとの直線的補間値をとるように設定されている。さらに、図4の特性曲線に車体重量mに対応して設定圧の補正を行い、車体重量が大きい程ブレーキ圧の影響も少ないことから、設定圧を高めに補正する。
【0043】
ステップ109では、ブレーキ圧センサ33で検出したブレーキ圧Pbを読込み、このブレーキ圧Pbがブレーキ予圧Pstに一致するように電磁弁5を通電制御してからタイマ割込処理を終了して所定のメインプログラムに復帰する。
この図3の処理において、ステップ101、104〜106の処理が要ブレーキ予圧状態判断手段に対応し、ステップ102、103、107〜111の処理がブレーキ圧発生手段に対応している。
【0044】
したがって、今、自車両がブレーキペダル23を踏込んで停車しているものとすると、この状態では、図3の制御処理において、ステップ100からステップ102に移行し、自車両だ停車中で自車速Vが“0”であるので、ステップ103に移行し、荷重センサ32で検出した車体重量mを読込み、次いでステップ110に移行して、ブレーキ予圧Pstを“0”に設定し、次いでステップ111に移行して、ブレーキ予圧Pstが“0”に設定されているので、電磁弁5に対する通電を遮断状態として、ブレーキ予圧Pstを“0”としているが、運転者がブレーキペダル23を踏込んでいるので、マスタシリンダ25からブレーキペダル23の踏込量に応じたブレーキ圧を発生して、停車状態を維持している。
【0045】
この停車状態から、ブレーキペダルを23を解放し、これに代えてアクセルペダル27を踏込むことにより、自車両を発進させて走行状態とし、この走行状態で、先行車がいないか又は先行車との車間距離が制動を必要としていない程度に十分であるときには、図3の制御処理において、ステップ100からステップ101〜105に移行し、自車速Vを読込むと共に、車間距離L(n) を読込んで相対速度dVを算出し、これらに基づいて前記(1)式に従って要ブレーキ予圧状態であるか否かを判断する判断距離L0を演算する。
【0046】
このとき、先行車がいないか又は先行車との車間距離Lが十分に長いので、ステップ106でL>L0となり、要ブレーキ予圧状態ではないと判断されるので、ステップ100に移行し、ブレーキ予圧Pstが“0”に設定されて、電磁弁5の非通電状態が維持される。
この走行状態から、自車速Vより遅い先行車或いは渋滞、信号待ち等で停車している先行車に追いつくか又は先行車が減速することにより、車間距離Lが判断距離L0以下となると、図3の処理において、ステップ106からステップ107に移行し、ブレーキ予圧開始時車速V0を読込み、次いでステップ108に移行して、車体重量mとブレーキ予圧開始時車速V0とに基づいて図4のブレーキ予圧算出マップを参照してブレーキ予圧Pstを設定し、次いでステップ109に移行して、ブレーキ圧センサ33で検出したブレーキ圧Pbを読込み、これが設定されたブレーキ予圧Pstに一致するように、電磁弁5の通電量を制御する。このため、負圧ブースタ24の真空弁3が閉じ逆に大気弁4が開くことにより、負圧ブースタ24の変圧室1に大気圧が導入されて、軸筒17が左方に移動してプッシュロッド8を左動させ、マスタシリンダ25から運転者のブレーキ操作に先立ってブレーキ予圧Pstに応じたブレーキ圧が発生されて制動状態となる。
【0047】
このとき、ブレーキ予圧Pstは、自車速Vが低い程小さい値となり、かつ車体重量mが大きい程大きな値となるので、低車速域で乗員数や積載物が少なくて車体重量mが小さい場合にはブレーキ予圧Pstも小さい値となるため、ブレーキ予圧Pstに応じたブレーキ圧による制動状態となっても、運転者に違和感を与えることがなく、運転者のブレーキ操作を見越した予ブレーキ制御を行うことができる。
【0048】
このブレーキ予圧Pstに応じた制動力が発生されている状態で、運転者がアクセルペダル27を解放して、これに代えてブレーキペダル23を踏込むと、これがブレーキスイッチ26によって検出されるので、図3の制御処理において、ステップ100からステップ102に移行し、自車両が走行中であり、自車速VがV>0であるので、直接ステップ110に移行し、ブレーキ予圧Pstが“0”に設定されて、電磁弁5に対する通電が遮断されるので、マスタシリンダ25で発生されているブレーキ予圧が“0”となり、これに代えて、ブレーキペダル23が踏込まれることにより、その踏込量に応じたブレーキ圧が発生される。
【0049】
このとき、運転者がブレーキペダル23を踏込む前にブレーキ予圧が発生されており、これに続いてブレーキペダル23の踏込みによるブレーキ圧が発生されるので、ブレーキ応答性を向上させると共に、空走距離を短縮して制動距離を短くすることができる。
次に、本発明の第2の実施形態を図5及び図6について説明する。
【0050】
この第2の実施形態は、ブレーキ予圧を必要とする要ブレーキ予圧状態を車間距離Lと判断距離L0に基づいて判断する場合にかえて加速操作から制動操作に移行する際のアクセルペダル20の戻り速度に基づいて判断するようにしたものである。
この第2の実施形態では、図5に示すように、前述した第1の実施形態における図3の制御処理におけるステップ107〜109の処理が省略され、これらに代えて、ステップ106の判定結果が、L>L0であるときにはステップ206に移行して、後述するアクセル戻し速度Avの最大値Avmaxを“0”にクリアすると共に、アクセル戻し状態であることを表す状態フラグFSを“0”にリセットしてから前記ステップ110に移行し、L≦L0であるときに、ステップ207に移行して、アクセルペダル27が踏込まれてアクセル操作が行われているか否かを判定する。この判定は、アクセルストロークセンサ28で検出したアクセルストロークを読込み、これが零でないか否かを判定することにより行い、アクセルペダル27が踏込まれてアクセル操作が行われているときには、ステップ208に移行して、アクセクペダル27の戻し速度Avを演算する。この戻し速度Avの演算は、アクセクストロークセンサ28で検出した前回のアクセクストローク値La(n-1) から今回のアクセルストローク値La(n) を減算した減算値が負となったときに、この減算値をタイマ割込周期Tで除算することにより算出する。
【0051】
次いで、ステップ209に移行して、算出したアクセル戻し速度Avが負であるか否かを判定し、Av<0であるときには、ステップ210に移行して、アクセル戻し速度Avを“0”に設定してからステップ211に移行し、Av≧0であるときにはそのままステップ211に移行する。
このステップ211では、算出したアクセル戻し速度Avが最大値Avmaxを超えているか否かを判定し、Av≦Avmaxであるときには直接ステップ213に移行し、Av>Avmaxであるときには、現在のアクセル戻し速度Avが最大値であると判断してステップ212に移行し、現在のアクセル戻し速度Avを最大値Avmaxに設定してからステップ213に移行する。
【0052】
ステップ213では、最大値Avmaxをもとに図6に示すブレーキ予圧算出マップを参照して、ブレーキ予圧Pstを算出する。
ここで、ブレーキ予圧算出マップは、図6に示すように、運転者のアクセク操作を計測し、アクセル戻し速度が遅い場合は、運転者が感じる緊急の度合いが低いため、その後にブレーキ予圧が発生された場合に減速度の感じ方は敏感であり、速い場合は緊急の度合も高く戻した際に感じる減速度は遅い場合に比較して小さいことを考慮して低速部B1で一定の最小値Pminを持ち、高速部B3で一定の最大値Pmaxを持ち、中速部でB2では最小値Pminと最大値Pmaxの直線的補間値をとるように設定選定されている。
【0053】
次いで、ステップ214に移行して、アクセル戻し状態であるか否かを表す状態フラグFSをアクセル戻し状態を表す“1”にセットし、次いでステップ215に移行して、ブレーキ圧センサ33で検出したブレーキ圧Pbを読込み、これが設定されたブレーキ予圧Pstに一致するように電磁弁5の通電量を制御してしてからタイマ割込処理を終了してメインプログラムに復帰する。
【0054】
一方、ステップ207の判定結果がアクセル操作が行われていないものであるときには、ステップ216に移行して、状態フラグFSが“1”にセットされているか否かを判定し、これが“1”にセットされているときにはそのままステップ215に移行し、“0”にリセットされているときには、ステップ217に移行して、ブレーキ予圧Pstを最小値Pminに設定してから前記ステップ215に移行する。
【0055】
この図5の処理において、ステップ206〜217の処理がブレーキ圧発生手段に対応している。
この第2の実施形態によると、自車両が先行車がいないか又は先行車に対して十分な車間距離を維持して走行しているときには、前記第1の実施形態と同様にブレーキペダル23が解放されていることにより、ステップ101、104及び105の処理で判断距離L0を算出し、ステップ106でL>L0と判断されることにより、ステップ206に移行して、アクセル戻し速度Avの最大値Avmaxが“0”にクリアされると共に、状態フラグFSが“0”にリセットされる。
【0056】
この走行状態で、自車両が自車速より遅いか又は停車している先行車に追いついて、先行車との車間距離Lが判断距離L0以下となると、アクセルペダル27が既に解放されている場合には、ステップ207からステップ214に移行し、状態フラグFSが“0”にリセットされたままであるので、ステップ217に移行して、ブレーキ予圧Pstとして最小値Pminを設定してからステップ215に移行するので、マスタシリンダ25で最小値Pminのブレーキ予圧Pstを発生させることになり、運転者が違和感を感じることがない程度のブレーキ予圧Pstに応じたブレーキ圧を発生して軽い制動状態とする。
【0057】
また、自車両が先行車に接近することにより、車間距離Lが判断距離L0以下となった時点で、運転者がアクセルペダル27の踏込みを継続している場合には、ステップ207からステップ208に移行して、アクセル戻し速度Avの演算を行う。ここでは、アクセルペダル27の踏込みが継続されているので、前回のアクセルストローク値La(n-1) から今回のアクセルストローク値La(n) を減算した減算値が“0”又は負となるので、減算値が負であるときにはステップ210でアクセル戻し速度Avが“0”に設定されるので何れにしてもアクセル戻し速度Avが“0”となり、最大値Avmaxは更新されることなく“0”を維持する。このため、ステップ213で図6を参照して算出されるブレーキ予圧Pstは最小値Pminに設定され、次いでステップ214で状態フラグFSが“1”にセットされてからステップ215で電磁弁5が最小値Pminのブレーキ圧Pbを発生するように制御される。
【0058】
このアクセルペダル27の踏込状態から、制動状態とするために、アクセルペダル27を戻す状態となると、ステップ208で算出されるアクセル戻し速度Avが正の値となることにより、最大値Avmaxが現在のアクセル戻し速度Avに更新される。このため、緊急ブレーキを必要として運転者が素早くアクセルペダル27を解放すると、アクセル戻し速度Avも大きな値となることにより、ステップ213で算出されるブレーキ予圧Pstも大きな値となり、マスタシリンダ25でブレーキ予圧Pstに応じたブレーキ圧Pbが発生されて予ブレーキ状態となる。
【0059】
これに対して、緊急ブレーキをさほど必要とせず、アクセルペダル27を比較的ゆっくりと戻す場合には、アクセル戻し速度Avが小さい値となることから、ブレーキ予圧Pstも最小値Pmin又はこれに近い小さい値となり、軽い予ブレーキ状態となる。そして、アクセルペダル20が完全に解放されると、アクセルストロークセンサ28で検出されるアクセルストローク値Laが"0"となることにより、図3の制御処理において、ステップ207からステップ214に移行するが、状態フラグFSが"1"にセットされていることにより、そのままステップ215に移行して、前回設定されたブレーキ予圧Pstに基づいて予ブレーキ制御が継続される。
【0060】
その後、ブレーキペダル23が踏込まれると、図5の制御処理において、ステップ100からステップ102に移行して、ブレーキ予圧Pstが“0”に設定されるが、マスタシリンダ25ではブレーキペダル23の踏込量に応じたブレーキ圧を発生させて制動状態を継続する。
次に、本発明の第3の実施形態を図7及び図8について説明する。
【0061】
この第3の実施形態では、要ブレーキ予圧状態となって予ブレーキ制御が開始された状態で、ブレーキペダル23が踏込まれるまでの間の経過時間に応じて緊急度合いを判断して、ブレーキ予圧を調整するようにしたものである。すなわち、第3の実施形態では、制御装置29で図7に示す制御処理を実行する。
【0062】
この制御処理も、前述した第1及び第2の実施形態と同様に所定時間(例えば10msec)毎のタイマ割込処理として実行され、先ず、ステップ300で自車速Vを読込み、次いでステップ301で前記第1の実施形態におけるステップ104と同様に車間距離Lを読込むと共に、相対速度dVを演算してからステップ302に移行する。
【0063】
このステップ302では、自車速V、相対速度dV及び車間距離Lをもとに下記(2)式の演算を行って目標減速度Gbを算出する。
Gb={V2 −(V−dV)2 }/2L …………(2)
次いで、ステップ303に移行して、後述する要ブレーキ状態となった時点からの経過時間を計測するカウンタのカウント値Tpが“0”であるか否かを判定し、Tp=0であるときには、要ブレーキ予圧状態となっていないものと判断してステップ304に移行し、ステップ302で算出した目標減速度Gbが予め設定した設定値Gsを越えているか否かを判定し、Gb≦Gsであるときには、ブレーキ予圧の必要がないものと判断してそのままタイマ割込処理を終了して所定のメインプログラムに復帰し、Gb>Gsであるときには、ブレーキ予圧を必要とする要ブレーキ予圧状態であると判断してステップ305に移行する。
【0064】
このステップ305では、アクセルストロークセンサ28で検出したアクセルストローク値Laを読込んで、アクセルペダル27が踏込まれているか否かを判定し、アクセルペダル27が踏込まれているときには、ブレーキ予圧の必要がないものと判断してそのままタイマ割込処理を終了して所定のメインプログラムに復帰し、アクセルペダル27が解放されているときには、ステップ306に移行する。
【0065】
このステップ306では、前述した第1の実施形態におけるステップ107及び108と同様の処理を行ってブレーキ予圧Pstを算出し、次いで、ステップ307に移行して、ブレーキ予圧にPstに、ブレーキ圧Pbが一致するように電磁弁5を制御してからステップ308に移行して、要ブレーキ予圧状態となった時点からの経過時間を計測するソフトウェアカウンタのカウント値Tpを“1”だけインクリメントしてからタイマ割込処理を終了して所定のメインプログラムに復帰する。
【0066】
一方、前記ステップ303の判定結果が、カウンタのカウント値TpがTp>0であるときには、ステップ309に移行して、ブレーキスイッチ23のスイッチ信号を読込み、ブレーキペダル23が踏込まれているか否かを判定し、ブレーキペダル23が踏込まれているときには、ステップ310に移行して、ブレーキ予圧Pstを“0”に設定し、次いでステップ311に移行して、電磁弁5を非通電状態に制御してからステップ312に移行し、カウンタのカウント値Tpを“0”にクリアしてからタイマ割込処理を終了して所定のメインプログラムに復帰し、ブレーキペダル23が解放されているときにはステップ313に移行する。
【0067】
このステップ313では、アクセルストロークセンサ28で検出したアクセルストローク値Laを読込み、これに基づいてアクセルペダル27が踏込まれているか否かを判定し、アクセルペダル27が踏込まれているときには、ブレーキ予圧の必要性がない要ブレーキ予圧状態ではないものと判断して前記ステップ310に移行し、アクセルペダル27が解放されているときには要ブレーキ予圧状態であると判断して、ステップ314に移行する。
【0068】
このステップ314では、カウンタのカウント値Tpが緊急ブレーキ時にアクセルペダル27を解放してからブレーキペダル21が踏込まれるまでの最大経過時間でなる第1の所定時間に相当する設定値Tsに達したか否かを判定し、Tp<Tsであるときにはステップ315に移行して、前回設定されたブレーキ予圧Pst(n-1)をそのまま今回のブレーキ予圧Pstとして設定してから前記ステップ307に移行し、Tp≦Tsであるときには緊急ブレーキの必要性が低下したものと判断してステップ316に移行して、前回のブレーキ予圧Pst(n-1)から所定値ΔPを減算した値を今回のブレーキ予圧Pstとして設定してからステップ317に移行して、ブレーキ予圧Pstが“0”又は負値であるか否かを判定し、Pst>0であるときには、前記ステップ307に移行し、Pst>0であるときには、前記ステップ311に移行する。
【0069】
この図7の制御処理において、ステップ300〜305の処理が要ブレーキ予圧状態検出手段に対応し、ステップ306〜317の処理がブレーキ圧発生手段に対応している。
この第3の実施形態によると、先行車がいない場合、先行車がいても十分な車間距離となっている場合及び自車両と先行車とが等速で走行している場合には、車間距離センサ31で検出される車間距離Lが十分に大きな値となっていることか、ステップ302で算出される目標減速度Gbが略零となることにより、ステップ304で要ブレーキ予圧状態ではないものと判断されて、そのままタイマ割込処理を終了するので、ブレーキ予圧Pstは発生されず、通常の走行状態を維持する。
【0070】
この通常走行状態から自車両より低速で走行している先行車又は停止している先行車に追いつくことにより、車間距離センサ31で検出される車間距離Lが急速に減少してステップ301で算出される相対速度dVが大きな値となると、ステップ302で算出される目標減速度Gbも正の大きな値となる。このため、ステップ304からステップ305に移行するが、運転者がアクセルペダル27を踏込んでいる場合には、そのままタイマ割込処理を終了することになり、通常走行状態を継続するが、制動状態に移行するためにアクセルペダル27を解放すると、ステップ305からステップ306に移行して、第1の実施形態と同様に車体重量m及びブレーキ予圧開始車速V0に基づいて図4のブレーキ予圧算出マップを参照してブレーキ予圧Pstが図8に示すように設定され、これに基づいてステップ307で電磁弁5が制御されて、マスタシリンダ25から出力されるブレーキ圧Pbがブレーキ予圧Pstに制御されて予ブレーキ制御状態となると共に、ステップ308で計時カウンタのカウント値Tpがインクリメントされて"0"から"1"となる。
【0071】
このため、次のタイマ割込周期で、ステップ303からステップ309に移行して、ブレーキスイッチ26のスイッチ信号がオフ状態即ちブレーキペダル23が踏込まれていないときには、ステップ313に移行して、アクセルペダル27が解放されているので、ステップ314に移行して、カウント値Tpが"1"であるので、ステップ315に移行して、ブレーキ予圧Pstとして前回設定したブレーキ予圧Pst(n-1) を保持し、ブレーキ予圧Pstに応じたブレーキ圧Pbを発生させて予ブレーキ制御状態を継続する。
【0072】
そして、緊急ブレーキを必要として、運転者がアクセルペダル27の解放後計時カウンタのカウント値Tpが設定値Tsに達する以前に、ブレーキペダル23を踏込むと、ステップ309からステップ310に移行して、ブレーキ予圧Pstが図8で実線図示のように“0”に設定され、次いでステップ311で電磁弁5に対する通電が遮断されて、これが非通電状態に制御されることにより、ブレーキ予圧Pstに相当するブレーキ圧Pbは解消されるが、ブレーキペダル23が踏込まれていることにより、そのブレーキストロークに応じたブレーキ圧がマスタシリンダ25から出力されて、緊急ブレーキ状態となり、これと同時にステップ312で計時カウンタのカウント値Tpが“0”にクリアされる。
【0073】
このように緊急ブレーキ時には、運転者のブレーキ操作が行われるまで予ブレーキ制御によってブレーキ予圧Pstに応じたブレーキ圧Pbが発生されているので、ブレーキペダル23の踏込みに対して高応答性をもって制動状態に移行することができる。一方、要ブレーキ予圧状態となってから先行車が加速したり停止していた先行車が発進することにより、運転者がアクセルペダル27の解放後直ちにブレーキペダル23を踏込まないときには、計時カウンタのカウント値Tpが設定値Tsに達するまでの間はステップ314からステップ315に移行することにより、図8で破線図示のように最初に設定されブレーキ予圧Pstを維持するが、計時カウンタのカウント値Tpが設定値Tsに達すると、ステップ314からステップ316に移行して、前回のブレーキ予圧Pst(n-1) から所定値ΔPを減算した値を新たなブレーキ予圧Pstとして設定することにより、ブレーキ予圧Pstが時間の経過と共に徐々に減少され、これに応じてマスタシリンダ25で発生されるブレーキ圧Pbも徐々に減少し、ステップ316で算出されるブレーキ予圧Pstが零又は負となると、ステップ311に移行して、電磁弁5が非通電状態に制御され、これに応じてマスタシリンダ25で発生されるブレーキ圧Pbも"0"となり、次いでステップ312に移行して、計時カウンタのカウント値Tpが"0"にクリアされて予ブレーキ制御が停止される。換言すれば、運転者がアクセルペダル27の解放後直ちにブレーキペダル23を踏込まないときには、図8に示すように、ブレーキ予圧Pstが設定された時点からブレーキ予圧Pstが零又は負となるまでに要する第2の所定時間が経過すると、予ブレーキ制御が停止される。
【0074】
また、カウント値Tpが設定値Tsを越えてブレーキ予圧Pstの減圧状態となっている状態で、ブレーキペダル23が踏込まれると、これに応じてブレーキスイッチ26がオン状態となることにより、ステップ309からステップ310に移行して、ブレーキ予圧Pstが"0"に設定され、予ブレーキ状態から通常ブレーキ状態に移行する。
【0075】
このように、第3の実施形態によれば、目標減速度Gbが設定値Gsを越える要ブレーキ予圧状態となってから緊急ブレーキ操作に相当する経過時間が経過するまでの間は車体重量m及びブレーキ予圧開始車速V0に基づいて設定されたブレーキ予圧Pstを維持することにより、運転者がブレーキペダル23を踏込んだときに、高応答性をもって確実に制動状態に移行することができるが、アクセルペダル27を解放してからブレーキペダル23を踏込むまでの時間が長い場合には、緊急度合いが小さいものと判断して時間の経過と共にブレーキ予圧Pstを徐々に減少させて、終いにはブレーキ予圧Pstが解除されるので、不必要に予ブレーキ制御を継続することがなく、運転者に違和感を与えることを確実に防止することができる。
【0076】
なお、上記第3の実施形態においては、計時カウンタのカウント値Tpが設定値Tsに達するまでの間最初に設定したブレーキ予圧Pstを維持する場合について説明したが、これに限定されるものではなく、図9で実線図示のように、ブレーキ予圧Pstが設定されてから時間の経過と共にブレーキ予圧を徐々に減圧するようにしてもよく、また図9で一点鎖線図示のように経過時間が所定時間に達するまでの間は比較的緩い勾配でブレーキ予圧Pstを減少させ、所定時間を越えると比較的急な勾配でブレーキ予圧Pstを減少させるようにしてもよく、さらには、直線的に減少させる場合に代えて曲線的に減少させるようにしてもよい。ここでも、ブレーキ予圧Pstが設定された時点からブレーキ予圧Pstが零又は負となる時点までに要する時間が第2の所定時間となる。
【0077】
また、上記第1〜第3の実施形態においては、自車速V又はアクセル戻し速度Avに基づいてブレーキ予圧Pstを設定する場合について説明したが、これに限定されるものではなく、路面状態を検出して路面摩擦係数が小さくなるに応じてブレーキ予圧Pstを小さくするようにしてもよい。さらに、図10に示すように、ブレーキ予圧Pstを変速機のシフト位置が1速位置であるときに最大値Pmaxに設定し、これよりシフト位置が高速側となるに従ってブレーキ予圧Pstを徐々に低下させるようにしてもよく、この場合には、シフト位置が低速側に行くに従いエンジンブレーキ力が大きくなることから、大きなブレーキ予圧を与えても、運転者が違和感を抱くことがなく、より高い応答性をもって予ブレーキ制御を行うことができる。
【0078】
さらに、上記第1〜第3の実施形態においては、加速操作の終了をアクセルペダル27のストロークから検出する場合について説明したが、これに限定されるものではなく、スロットル開度が“0”であることを検出するようにしてもよく、さらにはアクセルペダル27にその踏込みを検出するアクセルスイッチを設けるようにしてもよい。
【0079】
同様に、ブレーキ操作についてもブレーキスイッチ26に限らず、ブレーキペダル23のストロークから検出したり、ブレーキ圧センサ33で検出したブレーキ圧がブレーキ予圧以上となったときにブレーキ操作を開始したものとして検出するようにしてもよい。
さらにまた、上記第1〜第3の実施形態においては、車体重量mをパラメータとしてブレーキ予圧を設定する場合について説明したが、これに限定されるものではなく、車体重量mを所定値に固定してブレーキ予圧を算出するようにしてもよい。
【0080】
なおさらに、上記実施形態においては、車間距離センサ31で先行車を検出している場合について説明したが、これに限定されるものではなく、道路上の落下物等のブレーキ操作を必要とする障害物を検出した場合も上記と同様に予ブレーキ制御が行われる。また、上記第1〜第3の実施形態においては、演算によって相対速度を算出する場合について説明したが、これに限定されるものではなく、相対速度を検出することができる車間距離センサを適用した場合は、検出した相対速度をそのまま使用することができる。
【0081】
さらに、上記第1〜第3の実施形態においては、負圧ブースタ24に電磁弁5を組込むことにより、ブレーキ予圧Pstに応じたブレーキ圧Pbを発生させるようにした場合について説明したが、これに限定されるものではなく、別途油圧ポンプ等の流体圧源を設け、この流体圧源の流体圧を圧力制御弁等で圧力制御してブレーキ予圧Pstを発生させ、これをブレーキアクチュエータに供給するようにしてもよい。
【0082】
さらにまた、上記第1〜第3の実施形態においては、マスタシリンダ25を使用してブレーキ圧を発生させる場合について説明したが、これに限定されるものではなく、ブレーキアクチュエータとして電動モータを使用して制動力を発生させる場合には、ブレーキ予圧Pstに基づいて電動モータの駆動電流を制御するようにすればよい。
【図面の簡単な説明】
【図1】本発明の第1の実施形態を示すシステム構成図である。
【図2】第1の実施形態に適用し得る電子式負圧ブースタの断面図である。
【図3】第1の実施形態における制御装置の制御処理手順の一例を示すフローチャートである。
【図4】車体重量をパラメータとした自車速とブレーキ予圧との関係を表すブレーキ予圧算出マップを示す特性線図である。
【図5】本発明の第2の実施形態における制御装置の制御処理手順の一例を示すフローチャートである。
【図6】車体重量をパラメータとしたアクセル戻し速度とブレーキ予圧との関係を表すブレーキ予圧算出マップを示す特性線図である。
【図7】本発明の第3の実施形態における制御装置の制御処理手順の一例を示すフローチャートである。
【図8】ブレーキ予圧の変化を示すタイムチャートである。
【図9】ブレーキ予圧の他の制御例を示すタイムチャートである。
【図10】変速機シフト位置とブレーキ予圧との関係を示す特性線図である。
【符号の説明】
21FL〜21RR 車輪
22FL〜22RR ブレーキアクチュエータ
23 ブレーキペダル
24 電子式負圧ブースタ
25 マスタシリンダ
26 ブレーキスイッチ
27 アクセルペダル
28 アクセルストロークセンサ
29 制御装置
30 車速センサ
31 車間距離センサ
32 荷重センサ
33 ブレーキ圧センサ
Claims (5)
- 車両前方の制動対象物に対する相対距離を検出する制動対象物検出手段と、該制動対象物検出手段で検出した制動対象物に対する相対距離に基づいてブレーキ予圧を必要とする要ブレーキ予圧状態であるか否かを判断する要ブレーキ予圧開始判断手段と、該要ブレーキ予圧開始判断手段で、要ブレーキ予圧状態であると判断されたときに、運転者のブレーキ操作が行われるまで車両走行状態に応じた微小ブレーキ予圧を発生させるブレーキ圧発生手段とを備え、前記ブレーキ圧発生手段は、発生させるブレーキ予圧を時間の経過に応じて常に減圧するように構成されていることを特徴とする予ブレーキ制御装置。
- 前記ブレーキ圧発生手段は、発生させるブレーキ予圧を予圧開始時から時間の経過に伴って徐々に減圧するように構成されていることを特徴とする請求項1記載の予ブレーキ制御装置。
- 車両前方の制動対象物に対する相対距離を検出する制動対象物検出手段と、該制動対象物検出手段で検出した制動対象物に対する相対距離に基づいてブレーキ予圧を必要とする要ブレーキ予圧状態であるか否かを判断する要ブレーキ予圧開始判断手段と、該要ブレーキ予圧開始判断手段で、要ブレーキ予圧状態であると判断されたときに、運転者のブレーキ操作が行われるまで車両走行状態に応じた微小ブレーキ予圧を発生させるブレーキ圧発生手段とを備え、前記ブレーキ圧発生手段は、発生させるブレーキ予圧を予圧開始時から第1の所定時間が経過するまで当該予圧開始時に設定されたブレーキ予圧を維持し、当該第1の所定時間が経過したのちに時間の経過に応じて常に減圧するように構成されていることを特徴とする予ブレーキ制御装置。
- 前記ブレーキ圧発生手段は、ブレーキ予圧を発生させてから第2の所定時間が経過したときにブレーキ予圧を解除するように構成されていることを特徴とする請求項1乃至3の何れかに記載の予ブレーキ制御装置。
- 前記ブレーキ圧発生手段は、運転者の加速操作又は制動操作を検出したときに、ブレーキ予圧を解除するように構成されていることを特徴とする請求項1乃至3の何れかに記載の予ブレーキ制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP25197199A JP4020232B2 (ja) | 1999-02-24 | 1999-09-06 | 予ブレーキ制御装置 |
| US09/640,792 US6415230B1 (en) | 1999-09-06 | 2000-08-18 | Method and apparatus for assisting vehicle operator braking action of a vehicle |
| EP00307108A EP1081004B1 (en) | 1999-09-06 | 2000-08-18 | Method and apparatus for assisting vehicle operator braking action of a vehicle |
| DE60023077T DE60023077T2 (de) | 1999-09-06 | 2000-08-18 | Verfahren und Vorrichtung zur Unterstützung der Bremsbetätigung eines Fahrzeugführers |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP4573599 | 1999-02-24 | ||
| JP11-45735 | 1999-02-24 | ||
| JP25197199A JP4020232B2 (ja) | 1999-02-24 | 1999-09-06 | 予ブレーキ制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2000309257A JP2000309257A (ja) | 2000-11-07 |
| JP4020232B2 true JP4020232B2 (ja) | 2007-12-12 |
Family
ID=26385793
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP25197199A Expired - Lifetime JP4020232B2 (ja) | 1999-02-24 | 1999-09-06 | 予ブレーキ制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4020232B2 (ja) |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2003006290A1 (de) * | 2001-07-11 | 2003-01-23 | Robert Bosch Gmbh | Verfahren und vorrichtung zur automatischen steuerung der verzögerungseinrichtung eines fahrzeugs |
| JP2004521028A (ja) * | 2001-07-11 | 2004-07-15 | ローベルト ボッシュ ゲゼルシャフト ミット ベシュレンクテル ハフツング | 車両の減速を作動させて実施する方法および装置 |
| DE10144879C1 (de) * | 2001-09-12 | 2003-09-11 | Bosch Gmbh Robert | Verfahren und Vorrichtung zur Verbesserung der Druckaufbaudynamik |
| JP4254139B2 (ja) * | 2002-06-20 | 2009-04-15 | 日産自動車株式会社 | 車両用制動力発生装置 |
| JP3982503B2 (ja) | 2004-01-21 | 2007-09-26 | 日産自動車株式会社 | 車両用走行制御装置 |
| JP3956943B2 (ja) | 2004-01-27 | 2007-08-08 | 日産自動車株式会社 | 車両用走行制御装置 |
| JP4246084B2 (ja) | 2004-02-17 | 2009-04-02 | 日産自動車株式会社 | 車両用走行制御装置 |
| JP2005297945A (ja) * | 2004-03-18 | 2005-10-27 | Advics:Kk | 車両用ブレーキ制御装置およびブレーキ制御方法 |
| JP2006298310A (ja) * | 2005-04-25 | 2006-11-02 | Nissan Motor Co Ltd | 車両用走行制御装置 |
| JP5007574B2 (ja) * | 2006-02-23 | 2012-08-22 | 株式会社アドヴィックス | 自動ブレーキ制御装置 |
| JP2007230453A (ja) * | 2006-03-02 | 2007-09-13 | Toyota Motor Corp | 車両用駆動力制御装置 |
| JP2007245984A (ja) * | 2006-03-17 | 2007-09-27 | Honda Motor Co Ltd | ブレーキ制御装置 |
| JP5056408B2 (ja) * | 2007-03-01 | 2012-10-24 | 株式会社アドヴィックス | 車両の運動制御装置 |
| JP5600330B2 (ja) * | 2012-02-16 | 2014-10-01 | 富士重工業株式会社 | 車両の運転支援装置 |
| US8868311B2 (en) * | 2012-10-04 | 2014-10-21 | Robert Bosch Gmbh | Method to deal with slow initial brake response for adaptive cruise control |
| JP5764111B2 (ja) * | 2012-11-22 | 2015-08-12 | 富士重工業株式会社 | 車両用ブレーキ圧制御装置 |
| JP2015145138A (ja) * | 2014-01-31 | 2015-08-13 | 日立オートモティブシステムズ株式会社 | ブレーキ制御装置 |
| JP2018001962A (ja) * | 2016-07-01 | 2018-01-11 | 本田技研工業株式会社 | 車両制御装置 |
| JP7173936B2 (ja) * | 2019-08-02 | 2022-11-16 | 本田技研工業株式会社 | 追従走行システム |
-
1999
- 1999-09-06 JP JP25197199A patent/JP4020232B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2000309257A (ja) | 2000-11-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3666342B2 (ja) | 走行制御装置 | |
| JP4020232B2 (ja) | 予ブレーキ制御装置 | |
| JP3929668B2 (ja) | 予ブレーキ制御装置 | |
| JP3473563B2 (ja) | 制動制御装置 | |
| JPH10157585A (ja) | 自動ブレーキ作用を実施する方法 | |
| JP3800007B2 (ja) | 制動制御装置 | |
| JP2844432B2 (ja) | 自動車において自動制動過程の開始感度を走行状態に関係して決定する方法 | |
| JP3552628B2 (ja) | 走行制御装置 | |
| JP3659146B2 (ja) | 制動制御装置 | |
| JP3747574B2 (ja) | ブレーキアシスト制御装置 | |
| JP3959748B2 (ja) | 車両用自動制動装置 | |
| JP3572448B2 (ja) | 車両用制動制御装置 | |
| JP5866824B2 (ja) | 加減速度制御装置、加減速度制御方法 | |
| JP3744073B2 (ja) | 緊急ブレーキアシストシステム | |
| JP4163844B2 (ja) | 車両の追突回避装置 | |
| JP2000264092A (ja) | 車間距離制御装置 | |
| JP3543544B2 (ja) | ブレーキのアシスト装置 | |
| JPH0542862A (ja) | 車間距離制御装置 | |
| JP3948268B2 (ja) | 走行制御装置 | |
| JP3543543B2 (ja) | 車間距離制御装置 | |
| JP4026478B2 (ja) | 車両用制動制御装置 | |
| JP3238588B2 (ja) | 車間距離制御装置 | |
| JP3456345B2 (ja) | 緊急ブレーキアシスト装置 | |
| JP7287504B2 (ja) | 駆動力制御方法及び駆動力制御装置 | |
| JP3714374B2 (ja) | ブレーキアシストシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20040413 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040610 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20040615 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20040820 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20061013 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070628 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070704 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070919 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101005 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4020232 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111005 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121005 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121005 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131005 Year of fee payment: 6 |
|
| EXPY | Cancellation because of completion of term |