JP2005297945A - 車両用ブレーキ制御装置およびブレーキ制御方法 - Google Patents
車両用ブレーキ制御装置およびブレーキ制御方法 Download PDFInfo
- Publication number
- JP2005297945A JP2005297945A JP2004298760A JP2004298760A JP2005297945A JP 2005297945 A JP2005297945 A JP 2005297945A JP 2004298760 A JP2004298760 A JP 2004298760A JP 2004298760 A JP2004298760 A JP 2004298760A JP 2005297945 A JP2005297945 A JP 2005297945A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- precharge
- brake
- braking force
- detection means
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims description 70
- 238000001514 detection method Methods 0.000 claims description 89
- 239000012530 fluid Substances 0.000 claims description 43
- 230000008859 change Effects 0.000 claims description 7
- 230000008569 process Effects 0.000 description 58
- 230000004048 modification Effects 0.000 description 21
- 238000012986 modification Methods 0.000 description 21
- 238000004891 communication Methods 0.000 description 14
- 239000007788 liquid Substances 0.000 description 13
- 238000012545 processing Methods 0.000 description 13
- 230000000994 depressogenic effect Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 230000009467 reduction Effects 0.000 description 4
- 238000013459 approach Methods 0.000 description 3
- 230000002265 prevention Effects 0.000 description 3
- 230000000903 blocking effect Effects 0.000 description 2
- 230000004438 eyesight Effects 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 230000000881 depressing effect Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- ZZUFCTLCJUWOSV-UHFFFAOYSA-N furosemide Chemical compound C1=C(Cl)C(S(=O)(=O)N)=CC(C(O)=O)=C1NCC1=CC=CO1 ZZUFCTLCJUWOSV-UHFFFAOYSA-N 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 230000004297 night vision Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000010349 pulsation Effects 0.000 description 1
- 238000011002 quantification Methods 0.000 description 1
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T17/00—Component parts, details, or accessories of power brake systems not covered by groups B60T8/00, B60T13/00 or B60T15/00, or presenting other characteristic features
- B60T17/18—Safety devices; Monitoring
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/32—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration
- B60T8/34—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration having a fluid pressure regulator responsive to a speed condition
- B60T8/48—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration having a fluid pressure regulator responsive to a speed condition connecting the brake actuator to an alternative or additional source of fluid pressure, e.g. traction control systems
- B60T8/4809—Traction control, stability control, using both the wheel brakes and other automatic braking systems
- B60T8/4827—Traction control, stability control, using both the wheel brakes and other automatic braking systems in hydraulic brake systems
- B60T8/4863—Traction control, stability control, using both the wheel brakes and other automatic braking systems in hydraulic brake systems closed systems
- B60T8/4872—Traction control, stability control, using both the wheel brakes and other automatic braking systems in hydraulic brake systems closed systems pump-back systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/02—Active or adaptive cruise control system; Distance control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/12—Pre-actuation of braking systems without significant braking effect; Optimizing brake performance by reduction of play between brake pads and brake disc
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2210/00—Detection or estimation of road or environment conditions; Detection or estimation of road shapes
- B60T2210/30—Environment conditions or position therewithin
- B60T2210/32—Vehicle surroundings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2210/00—Detection or estimation of road or environment conditions; Detection or estimation of road shapes
- B60T2210/30—Environment conditions or position therewithin
- B60T2210/36—Global Positioning System [GPS]
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Regulating Braking Force (AREA)
Abstract
【課題】 迅速に制動力を発生させなければならない状況下において、的確にプレチャージを行えるようにする。
【解決手段】 周辺環境検出部、例えばインフラ情報入力装置やナビゲーション装置によって危険なときおよび危険かもしれない場所を検出し、それらの場所については迅速に制動力を発生させられるようにすべく、プレチャージを行うようにしている。このため、ドライバによるアクセル操作に関係なく、必要な状況下において、的確にプレチャージを行うことができ、そのような場所ではドライバがブレーキペダルを踏み込んだときに、迅速に制動力が発生させられるようにすることができる。これにより、未然に事故などを予防することが可能となる。
【選択図】 図3
【解決手段】 周辺環境検出部、例えばインフラ情報入力装置やナビゲーション装置によって危険なときおよび危険かもしれない場所を検出し、それらの場所については迅速に制動力を発生させられるようにすべく、プレチャージを行うようにしている。このため、ドライバによるアクセル操作に関係なく、必要な状況下において、的確にプレチャージを行うことができ、そのような場所ではドライバがブレーキペダルを踏み込んだときに、迅速に制動力が発生させられるようにすることができる。これにより、未然に事故などを予防することが可能となる。
【選択図】 図3
Description
本発明は、ブレーキパッドなどの摩擦部材を被摩擦部材に押し当て、摩擦力を発生させることで車両における制動力を発生させるブレーキ機構に対して、摩擦部材に前もって加圧力を加えることで制動力を迅速に発生させるようにした車両用ブレーキ制御装置およびブレーキ制御方法に関するものである。
従来より、ブレーキパッドに対して前もって加圧力を加えることで、ブレーキキャリパ内における無効ストローク、例えば、ブレーキパッドとディスクロータとの間のギャップを前もってキャンセルできるようにしたブレーキ制御装置がある(例えば、特許文献1参照)。
このブレーキ制御装置では、アクセルペダルを戻す早さに応じて、各車輪に備えられるホイールシリンダ(以下、W/Cという)の圧力(W/C圧)をプレチャージすることで、ブレーキ作動に先立ち、ブレーキキャリパ内における無効ストロークをキャンセルするようにしている。これにより、ブレーキ作動に移行した際に、迅速に制動力を発生させられるようになっている。
特開平10−157585号公報
しかしながら、上記従来のブレーキ制御装置では、アクセルペダルが戻される速度に応じてW/C圧のプレチャージを行うようにされている。このため、アクセルペダルがゆっくりと戻されるような場合や、アクセルペダルが元々踏み込まれていないような状態において急にブレーキ作動を行う必要性が生じた場合には、ブレーキキャリパ内における無効ストロークをキャンセルしておくことができず、迅速に制動力を発生させることができなかった。
また、従来のブレーキ制御装置は、単にアクセルペダルが戻される速度にのみ基づいてW/C圧のプレチャージを行っていることから、周辺環境に関係なく、不必要な場合にもそのプレチャージが実行されてしまう。このため、ドライバに対してブレーキフィーリングの違和感を与えてしまう可能性がある。
本発明は上記点に鑑みて、迅速に制動力を発生させなければならない状況下において、的確にプレチャージを行える車両用ブレーキ制御装置およびブレーキ制御方法を提供することを目的とする。
また、不必要にプレチャージが行われることにより、ドライバに対してブレーキフィーリングの違和感を与えてしまうことを抑制できる車両用ブレーキ制御装置およびブレーキ制御方法を提供することも目的とする。
上記目的を達成するため、請求項1に記載の発明では、制動力制御手段(6)は、プレチャージ許可判定手段(4)によって周辺環境検出手段(2)にて検出された周囲環境が所定の判定基準を満たしていると判定された場合に、摩擦部材と被摩擦部材との間の無効ストロークを減少もしくはキャンセルさせるプレチャージ制御を実行することを特徴としている。
このように、周辺環境検出手段(2)によって検出された周囲環境が所定の判定基準を満たしているか否かを判定させることで、危険なときおよび危険かもしれない場所を検出し、そのような場所についてはプレチャージを行うようにしている。このため、ドライバによるアクセル操作に関係なく、必要な状況下において、的確にプレチャージを行うことができ、そのような場所でドライバがブレーキペダルを踏み込んだときに、迅速に制動力が発生させられるようにすることができる。これにより、未然に事故などを予防することが可能となる。
さらに、本車両用ブレーキ制御装置では、周囲環境に応じてプレチャージを行うようにしているため、不必要なときにまで頻繁にプレチャージが行われず、緊急なときなど、真に必要な場合にのみプレチャージが行われることになる。このため、ドライバのブレーキフィーリングに違和感を与えないようにすることが可能となる。
例えば、請求項2に示されるように、周辺環境検出手段(2)は、周囲環境としてインフラ情報を検出することができるインフラ情報入力装置を含んだ構成とされる。この場合、プレチャージ許可判定手段(4)は、インフラ情報入力装置にて検出されたインフラ情報が所定の判定基準を満たしているか否かを判定し、その判定結果に応じて制動力制御手段(6)にプレチャージ制御を実行させる。
これにより、インフラ情報、例えば車両に備えられたセンサのみでは得られないような情報に基づくプレチャージ制御を行うことが可能となる。
また、請求項3に示されるように、周辺環境検出手段(2)を道路マップやこの道路マップ内における各道路の情報を記憶したナビゲーション装置を含んだ構成とすることもできる。この場合、ナビゲーション装置にて、周囲環境として車両が走行する道路情報を検出すると共に、プレチャージ許可判定手段(4)にて、ナビゲーション装置に記憶された道路マップや道路の情報に基づき、ドライバに対して注意を喚起する道路であるか否かを判定し、注意を喚起する道路であると判定された場合には、制動力制御手段(6)にプレチャージ制御を実行させる。
これにより、例えば、一旦停止路、歩行者などが多数存在し得る道路、通学路、走行道路から死角になっていてドライバが先の状況を把握し難い道路など、ドライバに対して注意を喚起する道路である場合に、それに応じたプレチャージ制御を行うことが可能となる。
また、この場合、請求項4に示されるように、周辺環境検出手段(2)として車両における車速に応じた出力を発生する車速検出手段を含む構成とすることもできる。この場合、プレチャージ許可判定手段(4)に、ナビゲーション装置に記憶された道路マップや道路の情報および車速検出手段の出力に基づいて、現在の車速から一旦停車位置付近を超過する可能性があるか否か、もしくは、信号がない交差点付近を超過する可能性があるか否かを判定させ、その可能性があると判定された場合に、制動力制御手段(6)にプレチャージ制御を実行させることもできる。
これにより、現在の車速から一旦停車位置付近を超過する可能性がある場合や、信号がない交差点付近を超過する可能性がある場合に、それに応じてプレチャージ制御を行うことが可能となる。
また、請求項5に示されるように、周辺環境検出手段(2)として車両が右左折することを検出する右左折検出手段を含む構成とすることもできる。この場合、プレチャージ許可判定手段(4)に、ナビゲーション装置に記憶された道路マップや道路の情報および右左折検出手段の出力に基づいて、車両が右左折する可能性があるか否かを判定させ、右左折する可能性があると判定された場合には、制動力制御手段(6)にプレチャージ制御を実行させる。
これにより、車両が右左折するような場合に、それに前もってプレチャージ制御を行うことが可能となる。
また、この場合、請求項6に示されるように、周辺環境検出手段(2)として車両における車速に応じた出力を発生する車速検出手段を含む構成とすることもできる。この場合、プレチャージ許可判定手段(4)に、ナビゲーション装置に記憶された道路マップや道路の情報、車速検出手段の出力および右左折検出手段の出力に基づいて、車両が交差点で停車していることが確認されたのち、再び走行を始めるような状況において、車両が右折もしくは左折するか否かを判定させ、肯定判定された場合に、制動力制御手段(6)にプレチャージ制御を実行させることもできる。
さらに、請求項7に示されるように、周辺環境検出手段(2)としてドライバの挙動に応じた出力を発生する挙動検出手段を含む構成とすることもできる。この場合、プレチャージ許可判定手段(4)に、ナビゲーション装置に記憶された道路マップや道路の情報および挙動検出手段の出力に基づいて、車両が走行予定の道路の経路とドライバの挙動とが対応しているか否かを判定させ、対応していない場合に、制動力制御手段(6)にプレチャージ制御を実行させる。
これにより、車両が走行予定の道路の経路とドライバの挙動とが対応していないような場合に、それ応じてプレチャージ制御を行うことが可能となる。
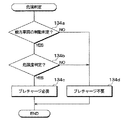
請求項8に記載の発明では、車両におけるブレーキ操作部材(11)の操作状態を検出し、その操作状態に応じた出力をプレチャージ許可判定手段(4)に伝えるブレーキ操作検出手段(3)を有し、プレチャージ許可判定手段(4)は、プレチャージ中に、ブレーキ操作検出手段(3)によりブレーキ操作部材(11)が操作されていることが検出された場合には、摩擦部材を被摩擦部材に押し当てるための加圧量について、ブレーキ操作部材(11)の操作により発生させられる加圧量の方がプレチャージによって発生させられる加圧量よりも大きくなった場合に、プレチャージを終了するようになっていることを特徴としている。
このように、ブレーキ操作部材(11)の操作により発生させられる加圧量の方がプレチャージによって発生させられる加圧量よりも大きくなった場合にのみ、プレチャージを終了させることができる。これにより、ドライバがブレーキ操作部材(11)を少し操作した場合にプレチャージが終了しないようにすることができる。
請求項9に記載の発明では、各車輪それぞれに備えられるブレーキキャリパの仕様に応じて、プレチャージ制御を行う際に用いられるブレーキ液量を異なった値に設定することを特徴としている。
このように、ブレーキキャリパごとにプレチャージに必要とされるブレーキ液量をブレーキキャリパに見合った量に設定することで、より適切なプレチャージを行うことが可能となる。
請求項10に記載の発明では、周辺環境検出手段(2)にて車速を検出し、プレチャージ許可判定手段(4)にて、プレチャージを行う際に用いられるブレーキ液量を車速に応じた量に制御することを特徴としている。
このように、車速に応じてプレチャージを行うときのブレーキ液量を設定するようにすることで、車速に応じた適切なプレチャージを行うことが可能となる。
例えば、請求項11に示されるように、プレチャージ許可判定手段(4)が、車速検出手段の出力から車速が所定車速よりも低いことを検出した場合、制動力制御手段(6)は、プレチャージを行う際に用いられるブレーキ液量を車速が所定車速以上である場合よりも少なくするか、もしくは、プレチャージ制御を実行しないようにする。
このように、車速が所定車速よりも低いようなプレチャージの効果が低くなる場合には、プレチャージに用いられるブレーキ液量を少なく設定するか、もしくは、プレチャージを行わないようにしても構わない。
また、請求項12に示されるように、制動力制御手段(6)は、車速検出手段の出力から車速が高くなるほど、プレチャージを行う際に用いられるブレーキ液量を多くする。
このように、車速が高くなるほど、プレチャージを行う際に用いられるブレーキ液量を多くすれば、ブレーキパッドの速度依存性に対応したプレチャージを行うことが可能となる。
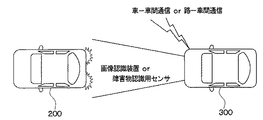
請求項13に記載の発明では、プレチャージ許可判定手段(4)は、インフラ情報入力装置が得た前方車両の車両情報もしくは画像認識装置が得た前方車両(200)の画像から、前方車両(200)のブレーキ操作が為されたか否かを判定し、制動力制御手段(6)は、プレチャージ許可判定手段(4)にて前方車両(200)のブレーキ操作が為されたと判定され場合に、プレチャージ制御を実行することを特徴としている。
このように、前方車両(200)のブレーキ操作が為された場合には危険性があるものとして、プレチャージを行うようにすれば、前方車両(200)が減速して急激に近づいてきても、それに対応して制動力を発生させることができる。
この場合、例えば、請求項14に示されるように、プレチャージ許可判定手段は、距離検出手段からの出力によって求められる前方車両(200)までの車間距離が第1所定値(N1)よりも小さく、かつ、車間距離の変化率から求められる前方車両(200)との相対速度が第2所定値(A1)よりも大きいという条件を満たすか否かを判定し、この条件を満たす場合に、制動力制御手段(6)は、プレチャージ制御を実行するようにすると好ましい。
つまり、危険度がほとんど無いくらい車間距離がある場合にまでプレチャージが行われないように、また、相対速度がほとんどゼロで前方車両(200)に追いつく可能性が無い場合にまでプレチャージが行われる必要は無い。このため、必要以上のプレチャージが行われないようにすることで、ドライバのブレーキフィーリングが良好になるようにすることができる。
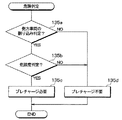
請求項15に記載の発明では、プレチャージ許可判定手段(4)は、インフラ情報入力装置が得た側方車両の車両情報もしくは画像認識装置が得た側方車両(500)の画像から、側方車両(500)が前方へ割り込みをしてくるか否かを判定し、制動力制御手段(6)は、プレチャージ許可判定手段(4)にて側方車両(500)が前方へ割り込みをしてくると判定された場合に、プレチャージ制御を実行しないことを特徴としている。
このように、側方車両(500)が前方へ割り込みしてくるような場合には危険性があるものとして、プレチャージを行うようにすれば、それに対応して制動力を発生させることができる。
この場合にも、例えば、請求項16に示されるように、プレチャージ許可判定手段(4)は、距離検出手段からの出力によって求められる側方車両(500)までの車間距離が第3所定値(N2)よりも小さく、かつ、車間距離の変化率から求められる側方車両(500)との相対速度が第4所定値(A2)よりも小さいという条件を満たすか否かを判定し、この条件を満たす場合に、制動力制御手段(6)は、プレチャージ制御を実行しないようにすると好ましい。
これにより、必要以上のプレチャージが行われないようにすることができ、ドライバのブレーキフィーリングが良好になるようにすることができる。
なお、このようなプレチャージが行われる場合には、請求項17に示されるように、車室内警告手段(5)にてプレチャージ中であることを警告することも可能である。
また、所定の周囲環境に応じてプレチャージ制御を実行する手法は、必ずしも実体のある装置に限られる必要は無く、その方法としても機能することは容易に理解できる。
このため、請求項18にかかる発明は、車両に備えられた制動力発生手段における摩擦部材を被摩擦部材に押し当てさせ、車両に対する制動力を制御する車両用ブレーキ制御方法であって、車両の外部における周囲環境を検出すると共に、この検出された周囲環境が所定の判定基準を満たしているか否かを判定し、この検出された周囲環境が所定の基準の判定基準を満たしていると判定された場合に、摩擦部材と被摩擦部材との間の無効ストロークを減少もしくはキャンセルさせるプレチャージ制御を実行する構成としてある。
すなわち、必ずしも実体のある装置に限らず、その方法としても有効であることに相違はない。むろん、上述してきた請求項2〜請求項17の構成を当該請求項18にかかる発明に適用しても同等の効果を得ることが可能であることは言うまでもない。
なお、上記各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
(第1実施形態)
本発明の一実施形態を適用した車両用ブレーキ制御装置のブロック構成を図1に示す。この車両用ブレーキ制御装置は、エンジン搭載車や電気自動車などどのような車両に対しても搭載可能である。以下、図1に基づいて、車両用ブレーキ制御装置の構成について説明する。
本発明の一実施形態を適用した車両用ブレーキ制御装置のブロック構成を図1に示す。この車両用ブレーキ制御装置は、エンジン搭載車や電気自動車などどのような車両に対しても搭載可能である。以下、図1に基づいて、車両用ブレーキ制御装置の構成について説明する。
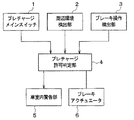
図1に示されるように、車両用ブレーキ制御装置は、プレチャージメインスイッチ1、周辺環境検出部2、ブレーキ操作検出部3、プレチャージ許可判定装置4、車室内警告部5、制動力制御手段に相当するブレーキアクチュエータ6を備えて構成されている。
プレチャージメインスイッチ1は、例えば、車室内におけるインストルメントパネル内に配置されるもので、ドライバによってオンオフ切替操作され、本実施形態に示す車両用ブレーキ制御装置を作動させるか作動させないかを切り替えるためのスイッチとなる。このプレチャージメインスイッチ1のオンオフ切替の状態を示す信号は、プレチャージ許可判定装置4に入力されるようになっており、プレチャージ許可判定装置4は、この信号に基づいて、プレチャージ制御処理を実行するか否かを判定するようになっている。
周辺環境検出部2は、車両の周囲の環境や自車両の走行状態を検出するためのものであり、危険な場所もしくは危険かもしれない状況のように、プレチャージを行う必要がある環境であるか否かの判定に用いられる基準となる電気信号を出力するものである。例えば、この周辺環境検出部2としては、インフラ情報入力装置、車速センサ、舵角センサ、ナビゲーション装置、画像認識装置、障害物認識用センサなどが挙げられる。
インフラ情報入力装置は、車両に備えられたセンサのみでは得られないような情報を、いわゆる車−車間通信や路−車間通信などを用いて入手する装置であり、例えばAHSシステムが作成するインフラ情報を入手するようになっている。例えば、インフラ情報入力装置により、交差点等に設置されたカメラを通じて得られる周辺状況情報を入手し、車両が通過する予定の交差点の情報を示す電気信号をプレチャージ許可判定装置4に出力することが可能である。
車速センサは、車両用ブレーキ制御装置が取り付けられた車両の速度に応じた出力信号を出力するものである。ここでは、車速センサを車速検出手段の一例として挙げているが、これに代えて、近年、車両に一般的に取り付けられるようになりつつある車輪速度センサを用いることも可能である。この場合、車輪速度センサから車輪速度に応じた検出信号が出力されるため、その検出信号に基づいてプレチャージ許可判定装置4にて車速を求めるようにしても良いし、ブレーキECUなど他のECUにおいて車輪速度センサの検出信号から車速が求められている場合には、その車速に関する信号をブレーキECUから受け取るようにしても良い。
舵角センサは、ドライバによるステアリング操作量に応じた信号を検出信号として出力するものである。この舵角センサの検出信号に基づいて、車両の旋回状態を求めることが可能となる。
ナビゲーション装置は、交差点やカーブ等の情報となる道路マップや、道路マップ内における各道路に関する情報、例えば、一旦停止路であるという情報、歩行者などが多数存在し得る道路であるという情報、通学路であるという情報、走行道路から死角になっていてドライバが先の状況を把握し難い道路であるという情報など、プレチャージを行う必要がある道路であることを示す情報を記憶している。このナビゲーション装置より、記憶した情報を電気信号としてプレチャージ許可判定装置4に出力することが可能である。
画像認識装置は、例えば、車載カメラなどのように、車両の前方や車室内の様子を画像として捉えることができる装置である。この車載カメラが撮影した映像の画像データに基づいて、例えば、車両前方における歩行者などを解析することや、ドライバの視線の方向を解析することができる。このような画像認識装置における画像データもしくは画像データを解析した後の歩行者などに関する情報を電気信号としてプレチャージ許可判定装置4に出力することが可能である。
障害物認識用センサは、例えば、車両の前方や車両の近傍の様子を検出するためのものであり、例えば、レーザー、超音波、赤外線などを用いて歩行者などの障害物までの距離を検出するようになっている。具体的には、レーザ光を車両前方に照射した後、その反射光を受け取り、出射時間と受光時間との間隔に基づいて前方車両までの距離を算出するレーザレーダや、赤外線を用いて夜間における車両の前方の様子を映し出すナイトビジョン装置が障害物認識用センサに該当する。この障害物認識用センサの検出信号、すなわち障害物までの距離を示す電気信号や、前方車両の様子を示した画像データもしくは画像データを解析した後の歩行者などに関する情報を示す電気信号をプレチャージ許可判定装置4に出力することが可能である。
また、ブレーキ操作検出部3は、ドライバによるブレーキペダル(ブレーキ操作部材)の操作に応じた電気信号を出力するものである。このブレーキ操作検出部3としては、ブレーキペダルのストローク量に応じた電気信号を出力するストロークセンサや、ブレーキペダルに加えられる踏力に応じた電気信号を出力する踏力センサが用いられる。このブレーキ操作検出部3からの電気信号に基づいて、ブレーキペダル操作が成されているか否かが分かるようになっている。
プレチャージ許可判定装置4は、CPU、ROM、RAM、I/Oなどを有する周知のマイクロコンピュータによって構成されているもので、ROMに記憶されたプログラムにしたがって、プレチャージ判定処理を実行するものである。
具体的には、プレチャージ許可判定装置4には、プレチャージメインスイッチ1および周辺環境検出部2からの電気信号が入力されるようになっており、プレチャージメインスイッチ1からプレチャージ制御処理を実行するという電気信号が入力されたときには、周辺環境検出部2からの電気信号に基づいてプレチャージ制御処理が実行されるようになっている。
このプレチャージ許可判定装置4におけるROMには、プレチャージを行うか否かを判定するための所定の判定基準が記憶されている。そして、周辺環境検出部2からの電気信号に基づいて検出される車両の周囲の環境や自車両の走行状態が、その判定基準を満たす場合には、プレチャージ許可判定装置4から、車室内警告部5にプレチャージ中であることを示す電気信号が出力されると共に、ブレーキアクチュエータ6にプレチャージを実行させるための電気信号が出力されるようになっている。
例えば、インフラ情報入力装置から得たインフラ情報に基づき、出会い頭追突事故が発生しやすいような環境であるか、右折時に対向車等に衝突しやすいような環境であるか、右左折時に横断歩道を同行している歩行者に追突してしまうような環境であるかなどが所定の判定基準を満たしているかが判定される。
また、ナビゲーション装置から得た道路マップや各道路に関する情報から、交差点、住宅街、サービスエリアなどのように、歩行者などが存在する可能性が高いエリアであるか否かが所定の判定基準を基に判定される。例えば、ナビゲーション装置に道路マップに関連付けられてエリア別に警告の必要性が数値化もしくはフラグ設定により記憶されている場合には、数値化された値が所定のしきい値以上であるとき、もしくはフラグが立っているときに、所定の判定基準を満たすとして、車両がその場所を走行する際に前もってプレチャージを実行させるべく、車室内警告部5およびブレーキアクチュエータ6に向けて電気信号が出力される。
さらに、ナビゲーション装置から得た道路マップや各道路に関する情報と、車速センサからの検出信号に基づき、現在の車速から一旦停車位置付近を超過する可能性があるか否か、もしくは、信号がない交差点付近を超過する可能性があるか否か等が所定の判定基準、例えば車速から想定される制動距離を基に判定される。
また、ナビゲーション装置から得た道路マップや各道路に関する情報と、車速センサおよび舵角センサからの検出信号に基づいて、車両が右左折する可能性があるか否かが所定の判定基準に基づいて判定される。例えば、道路マップおよび車速センサの検出信号に基づき、交差点で停車していることが確認されたのち、再び走行を始めるような状況下において舵角センサの検出信号からドライバによるステアリング操作が所定のしきい値以上成されている場合には、車両が右左折する可能性があると想定される。したがって、この場合にも、前もってプレチャージを実行させるべく、車室内警告部5およびブレーキアクチュエータ6に向けて電気信号が出力される。
なお、ここでは、舵角センサからの検出信号を例に挙げたが、勿論、ドライバによるウィンカーの操作信号がプレチャージ許可判定部4に入力されるようにし、その操作信号に基づいて車両が右左折することを判定して上記電気信号が出力されるようにしても良い。
また、ナビゲーション装置から得た道路マップや各道路に関する情報と、画像認識装置に基づいて、例えばドライバの挙動が走行予定の道路の経路と対応しているか否かが所定の判定基準に基づいて判定される。例えば、車両が左折する予定であるにも関わらず、ドライバが右方向を所定時間凝視しているような場合などが挙げられる。この場合にも、前もってプレチャージを実行させるべく、車室内警告部5およびブレーキアクチュエータ6に向けて電気信号が出力される。
車室内警告部5は、視覚もしくは聴覚を通じてドライバに対してプレチャージ中であることを報知するものである。例えば、車室内警告部5は、車室内におけるインストルメントパネルに設けられた警告用の表示ランプや、車室内に設置された警告用のブザーやオーディオ装置もしくはナビゲーション装置に装備されたスピーカなどの音声発生装置によって構成される。表示ランプによれば、視覚を通じてドライバに対してプレチャージ中であることを報知することができる。また、音声発生装置によれば、聴覚を通じてドライバに対してプレチャージ中であることを報知することができる。具体的には、この車室内警告部5は、例えば、上述した電気信号がプレチャージ許可判定装置4から入力されると、車室内警告部5が点灯したり音声を発生させたりして、その旨をドライバに報知するようになっている。
ブレーキアクチュエータ6は、自動加圧可能なブレーキ機構によって構成されている。換言すれば、ブレーキアクチュエータ6は、ブレーキパッドなどの摩擦部材をディスクロータなどの被摩擦対象に押し当てるまでの遊びとなる無効ストロークを前もって減少もしくはキャンセルさせられるように、W/C圧が自動加圧可能な構成となっている。
図2は、ブレーキアクチュエータ6の一例を示したものである。図2に示されるように、ブレーキアクチュエータ6は、左前輪と右後輪に加えられるブレーキ液圧を制御する第1配管系統と、右前輪と左後輪に加えられるブレーキ液圧を制御する第2配管系統の2配管系(X配管)を備えている。
車両に制動力を加える際にドライバによって踏み込まれるブレーキ操作部材としてのブレーキペダル11は、ブレーキ液圧発生源となる倍力装置12およびマスタシリンダ13に接続されており、ドライバがブレーキペダル11を踏み込むと、倍力装置12にて踏力が倍力され、マスタシリンダ13に配設されたマスタピストン13a、13bを押圧する。これにより、これらマスタピストン13a、13bによって区画されるプライマリ室13cとセカンダリ室13dとに同圧のマスタシリンダ圧(以下、M/C圧という)が発生させられるようになっている。
マスタシリンダ13には、プライマリ室13cおよびセカンダリ室13dそれぞれと連通する通路を有するマスタリザーバ13eが備えられている。マスタリザーバ13eは、その通路を通じてマスタシリンダ13内にブレーキ液を供給したり、マスタシリンダ13内の余剰のブレーキ液を貯留したりする。なお、各通路は、プライマリ室13cおよびセカンダリ室13dから延びる各主管路の管路直径よりも非常に小さい直径に形成されるため、マスタシリンダ13のプライマリ室13cおよびセカンダリ室13d側からマスタリザーバ13eへのブレーキ液の流入の際にはオリフィス効果を発揮するようになっている。
マスタシリンダ13に発生させられるM/C圧は、第1配管系統50aと第2配管系統50bを通じて各W/C14、15、34、35に伝えられるようになっている。
以下、これら各配管系統50a、50bについて説明するが、第1配管系統50aと第2配管系統50bとは、略同様の構成であるため、ここでは第1配管系統50aについて説明し、第2配管系統50bについては、第1配管系統50aを参照して説明を省略する。
第1配管系統50aには、上述したM/C圧を左前輪FLに備えられたW/C14及び右後輪RRに備えられたW/C15に伝達する主管路となる管路Aが備えられている。この管路Aを通じて、各W/C14、15それぞれにW/C圧を発生させられるようになっている。
また、管路Aには、連通・差圧状態の2位置を制御できる電磁弁で構成された第1差圧制御弁16が備えられている。この第1差圧制御弁16は、通常ブレーキ状態では弁位置は連通状態とされており、ソレノイドコイルに電力供給が成されると弁位置が差圧状態になる。第1差圧制御弁16における差圧状態の弁位置では、W/C14、15側のブレーキ 液圧がM/C圧よりも所定以上高くなった際にのみ、W/C14、15側からマスタシリンダ13側へのみブレーキ液の流動が許可される。このため、常時W/C14、15側がマスタシリンダ13側よりも所定圧力以上高くならないように維持され、それぞれの管路の保護が成されている。
そして、管路Aは、この第1差圧制御弁16よりもW/C14、15側の下流において、2つの管路A1、A2に分岐する。2つの管路A1、A2の一方にはW/C14へのブレーキ液圧の増圧を制御する第1増圧制御弁17が備えられ、他方にはW/C15へのブレーキ液圧の増圧を制御する第2増圧制御弁18が備えられている。
第1、第2増圧制御弁17、18は、連通・遮断状態を制御できる2位置弁として電磁弁により構成されている。そして、これら第1、第2増圧制御弁17、18が連通状態に制御されているときには、M/C圧あるいは後述するポンプ19からのブレーキ液の吐出によるブレーキ液圧をW/C14、15に加えることができるようになっている。
なお、ドライバが行うブレーキペダル11の操作による通常のブレーキ時においては、第1差圧制御弁16及び第1、第2増圧制御弁17、18は、常時連通状態に制御されている。
また、第1差圧制御弁16及び第1、第2増圧制御弁17、18には、それぞれ安全弁16a、17a、18aが並列に設けられている。第1差圧制御弁16の安全弁16aは、第1差圧制御弁16の弁位置が差圧状態である際にドライバによりブレーキペダル11が踏み込まれた場合に、M/C圧をW/C14、15に伝達可能とするために設けられている。また、各増圧制御弁17、18の安全弁17a、18aは、特にABS制御時において各増圧制御弁17、18が遮断状態に制御されている際に、ドライバによりブレーキペダル11が戻された場合において、この戻し操作に対応して左前輪FLおよび右後輪RRのW/C圧を減圧可能とするために設けられている。
また、第1、第2増圧制御弁17、18及び各W/C14、15の間における管路Aとリザーバ20のリザーバ孔とを結ぶ管路Bには、連通・遮断状態を制御できる2位置弁として、電磁弁からなる第1減圧制御弁21と第2減圧制御弁22とがそれぞれ配設されている。そして、これら第1、第2減圧制御弁21、22は、通常ブレーキ時には、常時遮断状態とされている。
リザーバ20と主管路である管路Aとの間を結ぶように管路Cが配設されている。この管路Cにはリザーバ20からマスタシリンダ13側あるいはW/C14、15側に向けてブレーキ液を吸入吐出するように、モータ60によって駆動される自吸式のポンプ19が設けられている。
なお、ポンプ19は一方向吸入吐出が可能なように安全弁19a、19bを備えている。また、ポンプ19が吐出したブレーキ液の脈動を緩和するために管路Cのうちポンプ19の吐出側には固定容量ダンパ23が配設されている。
管路Cのうちリザーバ20とポンプ19の間には、管路Dが接続されている。この管路Dはマスタシリンダ13のプライマリ室13cへ接続されている。そして、管路Dには、遮断・連通状態を制御できる第1制御弁24が備えられている。
この管路Dを通じ、ポンプ19にてマスタシリンダ13からブレーキ液を吸入し、管路Aに吐出することで、ブレーキアシスト制御時、TCS制御時、ABS制御時もしくは横滑り防止制御時に、W/C14、15側にブレーキ液を供給し、対象となる車輪のW/C圧を増加できるようになっている。
一方、第2配管系統50bは、第1配管系統50aにおける構成と略同様である。つまり、第1差圧制御弁16は、第2差圧制御弁36に対応する。第1、第2増圧制御弁17、18は、それぞれ第3、第4増圧制御弁37、38に対応し、第1、第2減圧制御弁21、22は、それぞれ第3、第4減圧制御弁41、42に対応する。第1制御弁24は、第1制御弁44に対応する。ポンプ19は、ポンプ39に対応する。また、管路A、管路B、管路C、管路Dは、それぞれ管路E、管路F、管路G、管路Hに対応する。以上のようにブレーキアクチュエータ6が構成されている。
そして、このように構成されたブレーキアクチュエータ6における各制御弁16〜18、21、22、24、36〜38、41、42、44及びポンプ19、39を駆動するためのモータ60への電圧印加制御がプレチャージ許可判定部4からの電気信号に基づいて実行されるようになっている。これにより、各W/C14、15、34、35に発生させられるW/C圧の制御が行われるようになっている。
このようなブレーキアクチュエータ6では、ノーマルブレーキ時には、各制御弁の弁位置が図2に示される位置となり、ブレーキペダル11の踏み込み量に応じてM/C圧が発生すると、そのM/C圧が各W/C14、15、34、35に伝えられ、各車輪に制動力が発生させられるようになっている。
そして、トラクション制御時や横滑り防止制御(Vehicle stability control)等においては、制御対象となる車輪の制動力を調整すべく、第1、第2差圧制御弁16、36が差圧状態にされると共に、モータ60への通電が行われる。これにより、ポンプ19、39によるブレーキ液の吸入吐出動作が行われ、管路C、Gおよび管路A、Eを通じて対象となる車輪に対応するW/C14、15、34、35が自動的に加圧され、制動力が発生させられるようになっている。
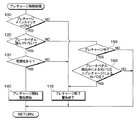
続いて、上記のように構成される車両用ブレーキ制御装置が実行するプレチャージ制御処理について、図3に示されるプレチャージ制御処理のフローチャートを参照して説明する。なお、この図中に示したステップは、各種処理を実行する手段に対応するものである。
車両用ブレーキ制御装置は、例えば、車両に備えられた図示しないイグニッションスイッチがONされると、図3に示すフローチャートに従ってプレチャージ制御処理を実行する。このプレチャージ制御処理は、車両用ブレーキ制御装置におけるプレチャージ許可判定装置4によって所定の制御周期毎に実行される。
まず、ステップ100では、プレチャージメインスイッチ1がオンされているか否か、つまりドライバがプレチャージ制御を要求しているか否かが判定される。この処理は、プレチャージメインスイッチ1からプレチャージ許可判定装置4に入力される電気信号に基づいて判定される。具体的には、プレチャージメインスイッチ1がオンされており、プレチャージ制御を要求する旨の電気信号が出力されている場合には肯定判定される。また、プレチャージスイッチ1がオフされており、プレチャージ制御を要求しない旨の電気信号が出力されている場合、もしくは、プレチャージ制御を要求する旨の電気信号が出力されていない場合には否定判定される。
ここで否定判定された場合には、ドライバがプレチャージ制御を要求していないものとして、ステップ110に進み、プレチャージ制御終了処理を行ったのち、プレチャージ制御処理を終了する。このプレチャージ制御終了処理は、プレチャージが開始された後にプレチャージを終了させる場合、もしくは、プレチャージを行わない場合に実行される。具体的には、この処理では、プレチャージを終了するために、モータ60の駆動を停止すると共に、第1、第2差圧制御弁16、36がノーマルブレーキ時のように連通状態の弁位置とされる。また、車室内警告部5による警告が停止される。
一方、肯定判定された場合には、ドライバがプレチャージ制御を要求しているものとして、ステップ120に進む。
ステップ120では、ブレーキペダル11が踏み込まれているか否かが判定される。この判定は、ブレーキ操作検出部3での検出結果に基づいて行われる。そして、このステップで肯定判定された場合には、ステップ130に進む。
ステップ130では、周辺環境が危険性を有する環境であるか否か、つまり制動力を迅速に発生させられるようにすべく、プレチャージを行う必要性のある環境であるか否かが判定される。この処理は、上述したように、周辺環境検出部2からプレチャージ許可判定装置4に入力される電気信号に基づいて、それらから得られる情報が所定の判定基準を満たしているか否かが判定されることにより行われる。
例えば、以下の内容についてが判定される。なお、ここで示す内容に関しての判定方法については、それぞれ上述した方法によって行われる。
(1)出会い頭追突事故が発生しやすいような環境であるか、右折時に対向車等に衝突しやすいような環境であるか、右左折時に横断歩道を同行している歩行者に追突してしまうような環境であるかなどについて。
(2)交差点、住宅街、サービスエリアなどのように、歩行者などが存在する可能性が高いエリアであるか否かについて。
(3)一旦停車位置付近を超過する可能性があるか否か、もしくは、信号がない交差点付近を超過する可能性があるか否か等について。この場合の処理内容を図4のフローチャートに示す。
まず、ステップ131aにて、車速センサから入力された検出信号に基づいて、現在の車速が演算されたのち、ステップ131bにて、ナビゲーション装置の入力に基づいて自車両の位置が検出される。そして、ステップ131cに進み、ナビゲーション装置装置から得られる道路マップや各道路に関する情報から、一旦停車位置付近や信号のない交差点付近を超過する可能性があるか否かが判定される。これは、上述したように、例えば、車速から想定される制動距離よりも一旦停車位置や信号のない交差点までの距離の方が短い場合か否かによって判定される。
そして、ステップ131cで肯定判定された場合には、ステップ131dに進んでプレチャージの必要性があるというフラグがセットされる。一方、ステップ131cで否定判定された場合には、ステップ131eに進んでプレチャージの必要性があるというフラグがリセットされる。このようにして、図3に示す危険性があるか否かの判定が実行されることになり、ここでのフラグの状態に基づいてステップ130における判定が実行されることになる。
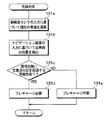
(4)車両が右左折する可能性があるか否かについて。この場合の処理内容を図5のフローチャートに示す。
まず、ステップ132a、132bでは、図4に示したステップ131a、131bと同様の処理が実行される。そして、ステップ132cでは、求めた車速とナビゲーション装置装置から得られる道路マップや各道路に関する情報とから、交差点で停止しているか否かが判定される。
このステップで否定判定された場合には、警告の必要性がないことから、ステップ132dに進んでプレチャージの必要性があるというフラグがリセットされる。一方、このステップで肯定判定された場合には、ステップ132eに進んで再度車速センサの検出信号に基づいて車速の演算が成される。そして、ステップ132fで再度求められた車速から自車両が発進したか否かが判定される。このステップで自車両が発進していないと判定された場合には、発進するまでステップ132eおよび132fの処理が繰り返され、発進したと判定されるとステップ132gに進む。
ステップ132gでは、舵角センサの出力信号の入力が行われる。続いてステップ132hに進み、自車両が右左折を行うか否かが判定される。この処理は、ステップ132gで入力した舵角センサの出力信号から求められる舵角が所定のしきい値を超えているか否かによって判定される。そして、ステップ132hで肯定判定された場合には、ステップ132iに進んで、プレチャージの必要性があるというフラグがセットされ、否定判定された場合には、ステップ132dに進んで、プレチャージの必要性があるというフラグがリセットされる。このようにして、図3に示す危険性があるか否かの判定が実行されることになり、ここでのフラグの状態に基づいてステップ130における判定が実行されることになる。
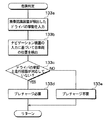
(5)ドライバの挙動が走行予定の道路の経路と対応しているか否かについて。この場合の処理内容を図6のフローチャートに示す。
まず、ステップ133aでは、画像認識装置が検出したドライバの挙動の入力が成される。また、ステップ133bでは、図4に示すステップ131bと同様の処理が実行される。
そして、ステップ133cでは、ドライバの挙動と走行経路が対応していないか対応しているかが判定される。この処理は、例えば、車両が左折する予定であるにも関わらず、ドライバが右方向を所定時間凝視しているか等の判定基準に基づいて判定される。
このステップで、ドライバの挙動が走行経路と対応していないと判定された場合には、ステップ133dに進んで、プレチャージの必要性があるというフラグがセットされ、対応していると判定された場合には、ステップ133eに進んで、プレチャージの必要性があるというフラグがリセットされる。このようにして、図3に示す危険性があるか否かの判定が実行されることになり、ここでのフラグの状態に基づいてステップ130における判定が実行されることになる。
このようにしてステップ130の処理が実行され、ステップ130での判定結果がプレチャージの必要性があるというものであれば、ステップ140に進み、プレチャージの必要性がないというものであればステップ110に進んで、上記と同様にして、プレチャージ制御終了処理を実行する。
そして、ステップ140では、プレチャージ制御開始処理として、ブレーキアクチュエータ6に対してプレチャージを実行するための電気信号が出力されると共に、車室内警告部5にプレチャージ中であることを示す電気信号が出力される。
これにより、ブレーキアクチュエータ6では、モータ60が駆動されることでポンプ19、39がブレーキ液の吸入吐出作動が行われ、さらに、第1、第2差圧制御弁16、36が差圧状態に設定される。したがって、M/C3におけるプライマリ室3cおよびセカンダリ室3dを通じて、ポンプ19、39によってブレーキ液が吸入吐出され、管路C、Gおよび管路A、Eを通じて各W/C14、15、34、35が加圧、つまりプレチャージされる。
このため、各W/C14、15、34、35に発生させられたW/C圧により、摩擦部材と被摩擦対象との間の無効ストロークが減少もしくはキャンセルさせられる。具体的には、ブレーキアクチュエータ6がディスクブレーキによって制動力を発生させるものである場合には、ブレーキキャリパ内においてブレーキパッドとディスクロータとの間の無効ストロークが減少もしくはキャンセルさせられる。また、ブレーキアクチュエータ6がドラムブレーキによって制動力を発生させるものである場合には、ブレーキドラム内においてブレーキシューとドラム内壁面との間の無効ストロークが減少もしくはキャンセルさせられる。
さらに、車室内警告部5により、ランプなどの表示もしくは音声による警告が行われ、ドライバにプレチャージ中であることが示される。
したがって、ドライバがプレチャージ中であることを認識することが可能になると共に、必要に応じてドライバがブレーキペダルを踏み込めば、摩擦部材と被摩擦対象との間の無効ストロークが減少もしくはキャンセルされていることから、車両に迅速に制動力を発生させることが可能となる。
また、このステップ140に移行してきた場合には、例えば、プレチャージ中フラグがセットされるなど、プレチャージが開始され、プレチャージ中であることが示されるようになっている。
一方、ステップ120において否定判定された場合には、ステップ150に進み、プレチャージ中であるか否かが判定される。この判定は、例えば、上記したプレチャージ中フラグがセットされているか否かに基づいて行われ、ブレーキペダル踏み込みがプレチャージ中に成されたものであるか否かが判定される。すなわち、ブレーキペダルが踏み込まれている状態においてプレチャージ中である場合には、そのプレチャージによって発生させられるW/C圧と、ブレーキペダル踏み込みによって発生させられるW/C圧のいずれを優先する必要があるかを判定しなければならない。
このため、まず、ステップ150において、プレチャージ中であるか否かが判定され、プレチャージ中でなければ、そのままプレチャージ制御処理を終了する。この場合、プレチャージがもともと行われていない状態であることから、ブレーキペダル踏み込みに応じたW/C圧が発生させられることになる。
そして、ステップ150において、プレチャージ中であると判定された場合には、ステップ160において、ブレーキペダル踏み込みによるW/C圧がプレチャージによるW/C圧よりも大きくなっているか否かが判定される。そして、ブレーキペダル踏み込みによるW/C圧の方がプレチャージによるW/C圧よりも大きい場合には、プレチャージの必要性が無くなったものとして、ステップ110に進んでプレチャージ制御終了処理が実行される。これにより、ブレーキペダル踏み込みに応じたW/C圧が発生させられることになる。
逆に、ブレーキペダル踏み込みによるW/C圧がプレチャージによるW/C圧に満たない場合には、まだプレチャージの必要性が有るものとして、プレチャージを停止させないままプレチャージ制御処理を終了する。これにより、ドライバがブレーキペダル11を少し踏んだだけではプレチャージが終了しないようにできる。なお、この場合には、プレチャージが継続されることになるため、ドライバが必要に応じてブレーキペダル11を踏み込めば、車両に迅速に制動力を発生させることが可能である。
以上説明したように、本実施形態に示した車両用ブレーキ制御装置によれば、危険なときおよび危険かもしれない場所を検出し、それらの場所については迅速に制動力を発生させられるようにすべく、プレチャージを行うようにしている。このため、ドライバによるアクセル操作に関係なく、必要な状況下において、的確にプレチャージを行うことができる。したがって、そのような場所でドライバがブレーキペダルを踏み込んだときに、迅速に制動力が発生させられるようにすることができる。これにより、未然に事故などを予防することが可能となる。
また、周辺環境検出部2としてナビゲーション装置やインフラ情報入力装置を用いるようにすれば、車両に搭載される周囲環境検出用の各種センサでは検出しきれない場所に関しても、事前にプレチャージを行わせることが可能となる。このため、危険なときだけでなく、危険そうなときにも効果的にプレチャージを行わせることができ、未然に事故などの防止に貢献することができる。
さらに、本実施形態の車両用ブレーキ制御装置では、周囲環境に応じてプレチャージを行うようにしているため、不必要なときにまで頻繁にプレチャージが行われず、緊急なときなど、真に必要な場合にのみプレチャージが行われることになる。このため、ドライバのブレーキフィーリングに違和感を与えないようにすることが可能となる。
そして、車両が一旦停止した後に、再び走行し始めたような状況においても、周辺環境からプレチャージの必要性があると判定される場合には、プレチャージが行われることになるため、そのような場合にも車両に迅速に制動力を発生させることができる。
(第1実施形態の第1変形例)
上記第1実施形態では、図3におけるステップ130において、危険判定を行うようにしたが、この危険判定の種類として、上記図4〜図6に示した例以外のものも考えられる。本変形例では、その一例について説明する。なお、本変形例で用いられる車両用ブレーキ制御装置のブロック構成に関しては、第1実施形態と同様であり、プレチャージ許可判定部4が実行する処理が異なるだけであるので、異なる部分についてのみ説明する。
上記第1実施形態では、図3におけるステップ130において、危険判定を行うようにしたが、この危険判定の種類として、上記図4〜図6に示した例以外のものも考えられる。本変形例では、その一例について説明する。なお、本変形例で用いられる車両用ブレーキ制御装置のブロック構成に関しては、第1実施形態と同様であり、プレチャージ許可判定部4が実行する処理が異なるだけであるので、異なる部分についてのみ説明する。
本変形例では、車両用ブレーキ制御装置により、前方車両のブレーキ操作が行われたことを検知し、それに応じてプレチャージを行う。つまり、図7に示される車両走行中の模式図で示されるように、前方車両200のブレーキ操作が行われた場合には、前方車両200の減速により前方車両200が急激に自車両300に近づいてくるような場合がある。このような場合には危険性があるものとして、プレチャージが実行されるようにする。
図8は、本変形例において、プレチャージ許可判定部4が実行する危険性の判定処理のフローチャートである。
ステップ134aでは、前方車両200の制動判定処理が実行される。具体的には、周辺環境検出部2から得られる情報から、前方車両200のブレーキ操作が為されたか否かが判定される。すなわち、周辺環境検出部2は、上述したように、インフラ情報入力装置や画像認識装置等で構成されていることから、前方車両200のブレーキ灯の様子もしくは前方車両200のブレーキ操作に関する情報を入手できるようになっている。このため、前方車両200の状態も周辺環境の一種として捉え、周辺環境検出部2を構成する画像認識装置が前方車両200のブレーキ灯が点灯したことを検知した場合、もしくは、インフラ情報入力装置が車−車間通信や路−車間通信によって前方車両200のブレーキ操作が行われたことを示す情報を受けとった場合に、前方車両200の制動が行われたものとして、本ステップで肯定判定されるようになっている。
続く、ステップ134bでは、危険度判定が実行される。例えば、前方車両200と自車両300との車間距離が所定値(第1所定値)N1よりも低く、かつ、前方車両200と自車両300との相対速度が所定値(第2所定値)A1よりも大きくなっているか否かが判定される。これら前方車両200と自車両300との車間距離や相対速度に関しても、周辺環境検出部2が障害物認識用センサ等で構成されていることから、この周辺環境検出部2にて得ることができる。
このとき、所定値N1および所定値A1は、ドライバのブレーキフィーリングをできるだけ変化させないような値として設定される。つまり、危険度がほとんど無いくらい車間距離がある場合にまでプレチャージが行われないように、また、相対速度がほとんどゼロで前方車両200に自車両300が追いつく可能性が無い場合にまでプレチャージが行われないようにしている。
このようにして、ステップ134a、134bで共に肯定判定されると、ステップ134cに進んで、プレチャージの必要性があるというフラグがセットされ、いずれか一方でも否定判定されると、ステップ134dに進んで、プレチャージの必要性があるというフラグがリセットされる。
このように、前方車両200のブレーキ操作が為された場合に、プレチャージを行うようにすれば、前方車両200が減速して自車両300に近づいてきた場合にも、それに対応して早急に制動力を発生させることが可能となる。そして、前方車両200のブレーキ操作が為された場合すべてにおいてプレチャージを行うのではなく、ステップ134bのような条件を満たした場合にのみプレチャージを行うようにしている。これにより、必要以上にプレチャージが為されないように制限でき、プレチャージの精度を向上させることができる。
(第1実施形態の第2変形例)
本変形例でも、上記第1実施形態で示した図3のステップ130での危険判定の一例について説明する。なお、本変形例においても、車両用ブレーキ制御装置のブロック構成に関しては、第1実施形態と同様であり、プレチャージ許可判定部4が実行する処理が異なるだけであるので、異なる部分についてのみ説明する。
本変形例でも、上記第1実施形態で示した図3のステップ130での危険判定の一例について説明する。なお、本変形例においても、車両用ブレーキ制御装置のブロック構成に関しては、第1実施形態と同様であり、プレチャージ許可判定部4が実行する処理が異なるだけであるので、異なる部分についてのみ説明する。
本変形例では、車両用ブレーキ制御装置により、自車両の前方に車両が割り込んできたことを検知し、それに応じてプレチャージを行う。つまり、図9に示した車両走行中の模式図で表されるように、自車両400の前方に他車両500が割り込んでくるような状況のときには、危険性があるものとして、プレチャージが実行されるようにする。
図10は、本変形例において、プレチャージ許可判定部4が実行する危険性の判定処理のフローチャートである。
ステップ135aでは、自車両400の前方への割り込みが為される状況であるか否かを判定する割り込み判定処理が実行される。具体的には、周辺環境検出部2から得られる情報から、自車両400の側方に存在する他車両(以下、単に側方車両という)500が自車両400の前方に割り込みを行ってくるような状況であるか否かが判定される。すなわち、周辺環境検出部2は、上述したように、インフラ情報入力装置や画像認識装置等で構成されていることから、側方車両500の方向指示器の様子もしくは側方車両500の操舵情報を入手できるようになっている。このため、側方車両500の状態も周辺環境の一種として捉え、周辺環境検出部2を構成する画像認識装置が側方車両500の方向指示器が点滅したことを検知した場合、もしくは、インフラ情報入力装置が車−車間通信や路−車間通信によって側方車両500の操舵情報を得て、その操舵情報から側方車両500が自車両400の前方に移動してくることが検知された場合に、側方車両500による割り込みが為されるものとして、本ステップで肯定判定されるようになっている。
続く、ステップ135bでは、危険度判定が実行される。例えば、周辺環境検出部2で得られた側方車両500と自車両400との車間距離が所定値(第3所定値)N2よりも低く、かつ、側方車両500と自車両400との相対速度が所定値(第4所定値)A2よりも大きくなっているか否かが判定される。
このとき、所定値N2および所定値A2は、ドライバのブレーキフィーリングをできるだけ変化させないような値として設定される。つまり、危険度がほとんど無いくらい車間距離がある場合にまでプレチャージが行われないように、また、相対速度がほとんどゼロで側方車両500に自車両400が追いつく可能性が無い場合にまでプレチャージが行われないようにしている。
さらに、周辺環境検出部2が車−車間通信によって得た舵角情報に基づいて側方車両500の走行軌跡を求め、側方車両500の走行軌跡に対して自車両400の走行軌跡に余裕がない場合のみ、プレチャージが行われるようにしても良い。
このようにして、ステップ135a、135bで共に肯定判定されると、ステップ135cに進んで、プレチャージの必要性があるというフラグがセットされ、いずれか一方でも否定判定されると、ステップ135dに進んで、プレチャージの必要性があるというフラグがリセットされる。
このように、側方車両500が自車両400の前に割り込んでくるような状況のときに、プレチャージを行うようにすれば、それに対応して早急に制動力を発生させることが可能となる。そして、側方車両500のブレーキ操作が為された場合すべてにおいてプレチャージを行うのではなく、ステップ135bのような条件を満たした場合にのみプレチャージを行うようにしている。これにより、必要以上にプレチャージが為されないように制限でき、プレチャージの精度を向上させることができる。
(第2実施形態)
本発明の第2実施形態について説明する。本実施形態は、第1実施形態に対して、プレチャージに用いられるブレーキ液量を前輪と後輪とで変えるものであり、具体的な車両用ブレーキ制御装置のブロック構成などについては同様であるため、異なる部分についてのみ説明する。
本発明の第2実施形態について説明する。本実施形態は、第1実施形態に対して、プレチャージに用いられるブレーキ液量を前輪と後輪とで変えるものであり、具体的な車両用ブレーキ制御装置のブロック構成などについては同様であるため、異なる部分についてのみ説明する。
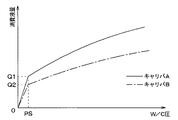
図11は、プレチャージを行う際に、前輪に備えられるブレーキキャリパAおよび後輪に備えられるブレーキキャリパBで消費されるブレーキ液量(以下、消費液量という)とW/C圧との関係を示した相関図である。
一般的に、前輪に備えられるブレーキキャリパAと後輪に備えられるブレーキキャリパBとは異なる仕様とされる。このため、図11に示されるように、前輪と後輪とで同じW/C圧PSを発生させる場合であっても、それぞれの消費液量Q1、Q2は異なったものとなる。具体的には、前輪のブレーキキャリパAの方が後輪のブレーキキャリパBよりも容量が大きな仕様とされるため、前輪の方が後輪よりも同じW/C圧PSを発生させるために必要な消費液量が多くなる。このため、本実施形態では、前輪と後輪とで消費液量を変えるようにする。
図12は、前輪および後輪での消費液量を設定する流量設定処理のフローチャートである。この処理は、プレチャージ要求が有った場合、つまり第1実施形態で示した図3におけるステップ140のプレチャージ制御開始処理において実行される。
まず、ステップ141aでは、加圧時間設定処理が実行される。この処理では、前輪に対応するW/C14、35を加圧するためにブレーキ液を供給する時間TAと、後輪に対応するW/C15、34を加圧するためにブレーキ液を供給する時間TBとが設定される。これら時間TAおよび時間TBは、それぞれ、前輪または後輪のW/C14、15、34、35に対して、図12に示したプレチャージ時のW/C圧PSを発生させるために必要な消費液量Q1、Q2を供給する時間に相当している。
続いて、ステップ141bに進み、各輪に対してプレチャージを実行する。すなわち、前輪のW/C14、35のブレーキキャリパAに対して時間TAだけ加圧を行い、後輪のW/C15、34のブレーキキャリパBに対して時間TBだけ加圧を行う。そして、その後に各輪のW/C圧を保持する。
このように、ブレーキキャリパごとにプレチャージに必要とされる消費液量を変え、ブレーキキャリパに見合った消費液量を設定することで、より適切なプレチャージを行うことが可能となる。
(第2実施形態の第1変形例)
上記第2実施形態では、ブレーキキャリパごとにプレチャージに必要とされる消費液量が変えられるように、ブレーキキャリパに見合った消費液量を設定し、それに相当する時間TA、TBだけ加圧を行うことで各W/C圧が設定値PSとなるようにしている。これに対し、各ブレーキキャリパのW/C圧を直接検出することで、各W/C圧が設定値PSとなるようにすることも可能である。すなわち、図13に示されるように、図2に示した車両用ブレーキ制御装置におけるブレーキアクチュエータ6の各W/C14、15、34、35に対応して圧力センサ14a、15a、34a、35aを備え、各W/C圧を検出し、それが所望の設定圧PSとなるようにする。
上記第2実施形態では、ブレーキキャリパごとにプレチャージに必要とされる消費液量が変えられるように、ブレーキキャリパに見合った消費液量を設定し、それに相当する時間TA、TBだけ加圧を行うことで各W/C圧が設定値PSとなるようにしている。これに対し、各ブレーキキャリパのW/C圧を直接検出することで、各W/C圧が設定値PSとなるようにすることも可能である。すなわち、図13に示されるように、図2に示した車両用ブレーキ制御装置におけるブレーキアクチュエータ6の各W/C14、15、34、35に対応して圧力センサ14a、15a、34a、35aを備え、各W/C圧を検出し、それが所望の設定圧PSとなるようにする。
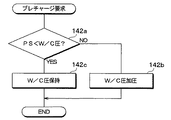
図14は、本変形例におけるW/C圧制御処理のフローチャートである。この処理も、第2実施形態と同様、プレチャージ要求が有った場合、つまり第1実施形態で示した図3におけるステップ140のプレチャージ制御開始処理において実行されるもので、各輪ごとに実行される。
まず、ステップ142aでは、圧力センサ14a、15a、34a、35aで検出されたW/C圧が設定圧PS以上になったか否かが判定される。そして、このステップで否定判定されればステップ142bに進み、W/C圧が加圧される。また、肯定判定されれば、ステップ142cに進み、その圧力が保持されるように、W/C圧の加圧が停止される。
このように、各W/C14、15、34、35におけるW/C圧を直接検出し、それらが設定値PSとなるまで加圧するようにすれば、ブレーキキャリパごとにプレチャージに必要とされる消費液量が異なっていても、各W/C圧を設定値PSにすることができる。これにより、第2実施形態と同様に、より適切なプレチャージを行うことが可能となる。
なお、ここでは各W/C14、15、34、35それぞれのW/C圧をそれぞれ検出できるようにしたが、各ブレーキ配管系統ごとに圧力を検出するようにしても構わない。
(第2実施形態の第2変形例)
また、各車輪のスリップ率に基づいて、各W/C圧が設定値PSとなるようにすることも可能である。この場合、周辺環境検出部2を構成する車速センサの検出信号に基づいて、車輪速度とそれに基づいて求められた推定車体速度とからスリップ率を求め、このスリップ率が所定値Nを超えた場合に、各W/C圧が設定値PSとなったものする。
また、各車輪のスリップ率に基づいて、各W/C圧が設定値PSとなるようにすることも可能である。この場合、周辺環境検出部2を構成する車速センサの検出信号に基づいて、車輪速度とそれに基づいて求められた推定車体速度とからスリップ率を求め、このスリップ率が所定値Nを超えた場合に、各W/C圧が設定値PSとなったものする。
図15は、本変形例におけるW/C圧制御処理のフローチャートである。この処理も、第2実施形態と同様、プレチャージ要求が有った場合、つまり第1実施形態で示した図3におけるステップ140のプレチャージ制御開始処理において実行されるもので、各輪ごとに実行される。
まず、ステップ143aでは、各輪のスリップ率が所定値Nを超えているか否かが判定される。そして、このステップで否定判定されればステップ143bに進み、W/C圧が加圧される。また、肯定判定されれば、ステップ143cに進み、その圧力が保持されるように、W/C圧の加圧が停止される。
すなわち、スリップ率は、W/C圧に応じて車輪速度が推定車体速度よりも落ち込むことから高くなるものであるため、スリップ率が所定値Nとなった場合に、W/C圧が設定値PSになったと想定することができる。このため、スリップ率が所定値Nになった場合に、W/C圧の加圧を停止するのである。なお、ここでいう所定値Nは、W/C圧が設定圧PSになった場合に発生し得る制動力がW/C圧−制動力特性から判るため、その制動力に応じた路面μとスリップ率Sとの関係(μ−Sカーブ)から設定圧PSに相当するスリップ率を求めることで決まる。このとき、路面μに応じてμ−Sカーブの傾きが変わることになるが、設定値PSに応じたスリップ率は、非常に小さなものであり、μ−Sカーブの立ち上がりの一部のみで表されることから、路面μに応じたμ−Sカーブの傾きの変化に応じて所定値Nを変化させる必要は無い。
このように、各輪のスリップ率を検出し、それらが設定値PSに応じた所定値NとなるまでW/C圧を加圧するようにすれば、ブレーキキャリパごとにプレチャージに必要とされる消費液量が異なっていても、各W/C圧を設定値PSにすることができる。これにより、第2実施形態と同様に、より適切なプレチャージを行うことが可能となる。また、上記第1変形例に対して圧力センサが必要とならない分、車両用ブレーキ制御装置の構成要素の簡素化を図ることも可能となる。
(第3実施形態)
本発明の第3実施形態について説明する。本実施形態は、第1実施形態に対して、車速に応じてプレチャージに用いられるブレーキ液量を変えるものであり、具体的な車両用ブレーキ制御装置のブロック構成などについては同様である。
本発明の第3実施形態について説明する。本実施形態は、第1実施形態に対して、車速に応じてプレチャージに用いられるブレーキ液量を変えるものであり、具体的な車両用ブレーキ制御装置のブロック構成などについては同様である。
上記第1、第2実施形態では、車速に応じてプレチャージに用いられるブレーキ液量は変えられていないが、極低速時などにおいては、プレチャージによる効果が低くなるため、プレチャージに用いられるブレーキ液量を少なくするもしくは、プレチャージを行わないようにしても構わない。
また、ブレーキパッドが高速走行時などにおいて摩擦力が低下するような速度依存性を有しているような場合には、高速走行時はプレチャージに用いられるブレーキ液量をそれよりも低速で走行している場合に対して多くした方が好ましい。
したがって、車速が高くなるに応じてプレチャージに用いられるブレーキ液量が多くなるように、例えば設定値PSと車速との関係を示したマップを用いて、周辺環境検出部2を構成する車速センサから求められた車速に応じた設定値PSを求め、それに応じたブレーキ液量となるようにする。
このようにすれば、車速に応じた適切なプレチャージを行うことが可能となる。なお、ここでは本発明の第3実施形態として説明したが、もちろん、本実施形態で説明した車速に応じてプレチャージに用いられるブレーキ液量を変更することに関しては、第1、第2実施形態や第1、第2実施形態の変形例と組み合わせることも可能である。
(他の実施形態)
上記実施形態では、ナビゲーション装置から得た道路マップや各道路に関する情報を用いてプレチャージを行う場合についての説明を行っているが、この場合のプレチャージに関しては、例えば、ナビゲーション装置を使用したルート設定が予め行われている場合にのみ実行されるようにすることも可能である。
上記実施形態では、ナビゲーション装置から得た道路マップや各道路に関する情報を用いてプレチャージを行う場合についての説明を行っているが、この場合のプレチャージに関しては、例えば、ナビゲーション装置を使用したルート設定が予め行われている場合にのみ実行されるようにすることも可能である。
さらに、上記実施形態では、プレチャージ許可判定装置4に周辺環境検出部2からの電気信号が入力されるようにしているが、必ずしもこのような形態である必要は無い。例えば、近年、車内LAN(いわゆるCAN)と呼ばれる車内通信網が発達しつつあり、この車内LANに各種データが載せられるようになっている。このような車内LANを通じて、周辺環境検出部2での検出結果を示すデータを受け取るようにすることも可能である。この場合、周辺環境検出部2での検出結果は、例えば、プレチャージ許可判定装置4とは異なる他のECU(例えばエンジンECUやブレーキECUなど)によって各種演算が行われた後のデータとして車内LANに載せられることもある。本発明は、このような形態のものに対しても適用可能である。
また、自動加圧可能なブレーキアクチュエータ6の一例として、図3に示す配管系統を有するものを挙げたが、これは単なる一例であり、自動加圧可能なものであれば、その他の構造であっても構わない。例えば、電動油圧ポンプを用いて助勢を行うハイドロブースタをブレーキアクチュエータ6として適用することも可能である。また、油圧によるブレーキ構成に限らず、電気的に制動力を発生させる電動ブレーキをブレーキアクチュエータ6として適用することも可能である。
さらに、車両が交差点で停止した後に、発進するような場合には、すでに制動力が発生させられた後であり、W/C圧の加圧が行われた状態となっている。このため、車両用ブレーキ制御装置を、このような状態の時にのみプレチャージを行わせるものとする場合には、そのときに発生しているW/C圧の一部を保持すればよいため、ブレーキアクチュエータ6が自動加圧可能な構成でなくても構わない。
1…プレチャージメインスイッチ、2…周辺環境検出部(周辺環境検出手段)、
3…ブレーキ操作検出部(ブレーキ操作検出手段)、
4…プレチャージ許可判定部(プレチャージ許可判定手段)、
5…車室内警告部(車室内警告手段)、
6…ブレーキアクチュエータ(制動力制御手段)。
3…ブレーキ操作検出部(ブレーキ操作検出手段)、
4…プレチャージ許可判定部(プレチャージ許可判定手段)、
5…車室内警告部(車室内警告手段)、
6…ブレーキアクチュエータ(制動力制御手段)。
Claims (18)
- 車両に備えられた摩擦部材を被摩擦部材に押し当てさせることにより、車両に対する制動力を制御する制動力制御手段(6)と、
前記車両の外部における周囲環境を検出する周辺環境検出手段(2)と、
所定の判定基準に基づいて、前記周辺環境検出手段(2)によって検出された周囲環境が前記所定の判定基準を満たしているか否かを判定するプレチャージ許可判定手段(4)とを備え、
前記制動力制御手段(6)は、前記プレチャージ許可判定手段(4)によって前記周辺環境検出手段(2)にて検出された周囲環境が前記所定の判定基準を満たしていると判定された場合に、前記摩擦部材と前記被摩擦部材との間の無効ストロークを減少もしくはキャンセルさせるプレチャージ制御を実行することを特徴とする車両用ブレーキ制御装置。 - 前記周辺環境検出手段(2)は、インフラ情報を得ることができるインフラ情報入力装置を含み、
前記プレチャージ許可判定手段(4)は、前記インフラ情報入力装置が得たインフラ情報が前記所定の判定基準を満たしているか否かを判定し、
前記制動力制御手段(6)は、前記プレチャージ許可判定手段(4)によって前記インフラ情報入力装置が得たインフラ情報が前記所定の判定基準を満たしていると判定された場合に、前記プレチャージ制御を実行するようになっていることを特徴とする請求項1に記載の車両用ブレーキ制御装置。 - 前記周辺環境検出手段(2)は、道路マップやこの道路マップ内における各道路の情報を記憶したナビゲーション装置を含むと共に、前記ナビゲーション装置にて前記周囲環境として前記車両が走行する道路情報を検出し、
前記プレチャージ許可判定手段(4)は、前記ナビゲーション装置に記憶された前記道路マップや前記道路の情報に基づき、危険性を有する道路であるか否かを判定し、
前記制動力制御手段(6)は、前記プレチャージ許可判定手段(4)によって危険性を有する道路であると判定された場合には、前記プレチャージ制御を実行するようになっていることを特徴とする請求項1または2に記載の車両用ブレーキ制御装置。 - 前記周辺環境検出手段(2)は、前記車両における車速に応じた出力を発生する車速検出手段を含み、
前記プレチャージ許可判定手段(4)は、前記ナビゲーション装置に記憶された前記道路マップや前記道路の情報および前記車速検出手段の出力に基づいて、現在の車速から一旦停車位置付近を超過する可能性があるか否か、もしくは、信号がない交差点付近を超過する可能性があるか否かを判定し、
前記制動力制御手段(6)は、前記プレチャージ許可判定手段(4)によって現在の車速から一旦停車位置付近を超過する可能性があると判定された場合、もしくは、信号がない交差点付近を超過する可能性があると判定された場合に、前記プレチャージ制御を実行するようになっていることを特徴とする請求項3に記載の車両用ブレーキ制御装置。 - 前記周辺環境検出手段(2)は、前記車両が右左折することを検出する右左折検出手段を含み、
前記プレチャージ許可判定手段(4)は、前記ナビゲーション装置に記憶された前記道路マップや前記道路の情報および前記右左折検出手段の出力に基づいて、前記車両が右左折する可能性があるか否かを判定し、
前記制動力制御手段(6)は、前記プレチャージ許可判定手段(4)によって右左折する可能性があると判定された場合に、前記プレチャージ制御を実行するようになっていることを特徴とする請求項3に記載の車両用ブレーキ制御装置。 - 前記周辺環境検出手段(2)は、前記車両における車速に応じた出力を発生する車速検出手段を含み、
前記プレチャージ許可判定手段(4)は、前記ナビゲーション装置に記憶された前記道路マップや前記道路の情報、前記車速検出手段の出力および前記右左折検出手段の出力に基づいて、前記車両が交差点で停車していることが確認されたのち、再び走行を始めるような状況において、前記車両が右折もしくは左折するか否かを判定し、
前記制動力制御手段(6)は、前記プレチャージ許可判定手段(4)によって右左折する可能性があると判定された場合に、前記プレチャージ制御を実行するようになっていることを特徴とする請求項5に記載の車両用ブレーキ制御装置。 - 前記周辺環境検出手段(2)は、ドライバの挙動に応じた出力を発生する挙動検出手段を含み、
前記プレチャージ許可判定手段(4)は、前記ナビゲーション装置に記憶された前記道路マップや前記道路の情報および前記挙動検出手段の出力に基づいて、前記車両が走行予定の道路の経路と前記ドライバの挙動とが対応しているか否かを判定し、
前記制動力制御手段(6)は、前記プレチャージ許可判定手段(4)によって前記車両が走行予定の道路の経路と前記ドライバの挙動とが対応していないと判定された場合に、前記プレチャージ制御を実行するようになっていることを特徴とする請求項3ないし6のいずれか1つに記載の車両用ブレーキ制御装置。 - 前記車両におけるブレーキ操作部材(11)の操作状態を検出し、その操作状態に応じた出力を前記プレチャージ許可判定手段(4)に伝えるブレーキ操作検出手段(3)を有し、
前記プレチャージ許可判定手段(4)は、前記プレチャージ中に、前記ブレーキ操作検出手段(3)により前記ブレーキ操作部材(11)が操作されていることが検出された場合には、前記摩擦部材を前記被摩擦部材に押し当てるための加圧量について、前記ブレーキ操作部材(11)の操作により発生させられる前記加圧量の方が前記プレチャージによって発生させられる前記加圧量よりも大きくなったか否かを判定し、
前記制動力制御手段(6)は、前記プレチャージ許可判定手段(4)によって前記ブレーキ操作部材(11)の操作により発生させられる前記加圧量の方が前記プレチャージによって発生させられる前記加圧量よりも大きくなった場合に、前記プレチャージ制御を終了するようになっていることを特徴とする請求項1ないし7のいずれか1つに記載の車両用ブレーキ制御装置。 - 前記車両の各車輪それぞれに、前記摩擦部材を前記被摩擦部材に押し当てるブレーキキャリパを有し、
前記制動力制御手段(6)は、前記ブレーキキャリパの仕様に応じて、前記プレチャージ制御を行う際に用いられるブレーキ液量を異なった値に設定するようになっていることを特徴とする請求項1ないし8のいずれか1つに記載の車両用ブレーキ制御装置。 - 前記周辺環境検出手段(2)は、前記車両における車速に応じた出力を発生する車速検出手段を含み、
前記制動力制御手段(6)は、前記プレチャージ制御を行う際に用いられるブレーキ液量を前記車速検出手段の出力に基づいて車速に応じた量に制御するようになっていることを特徴とする請求項1ないし9のいずれか1つに記載の車両用ブレーキ制御装置。 - 前記制動力制御手段(6)は、前記車速検出手段の出力から車速が所定車速よりも低いことを検出した場合、前記プレチャージ制御を行う際に用いられるブレーキ液量を前記車速が前記所定車速以上である場合よりも少なくするか、もしくは、前記プレチャージ制御を実行しないようにすることを特徴とする請求項10に記載の車両用ブレーキ制御装置。
- 前記制動力制御手段(6)は、前記車速検出手段の出力から車速が高くなるほど、前記プレチャージ制御を行う際に用いられるブレーキ液量を多くすることを特徴とする請求項10または11に記載の車両用ブレーキ制御装置。
- 前記周辺環境検出手段(2)は、前記車両情報を得ることができるインフラ情報入力装置もしくは前方車両(200)の画像を入力する画像認識装置を含み、
前記プレチャージ許可判定手段(4)は、前記インフラ情報入力装置が得た前方車両の車両情報もしくは前記画像認識装置が得た前記前方車両(200)の画像から、前記前方車両(200)のブレーキ操作が為されたか否かを判定し、
前記制動力制御手段(6)は、前記プレチャージ許可判定手段(4)にて前記前方車両(200)のブレーキ操作が為されたと判定された場合に、前記プレチャージ制御を実行するようになっていることを特徴とする請求項1ないし12のいずれか1つに記載の車両用ブレーキ制御装置。 - 前記周辺環境検出手段(2)は、前方車両までの距離を検出する距離検出手段を含み、
前記プレチャージ許可判定手段は、前記距離検出手段からの出力によって求められる前記前方車両(200)までの車間距離が第1所定値(N1)よりも小さく、かつ、前記車間距離の変化率から求められる前記前方車両(200)との相対速度が第2所定値(A1)よりも大きいという条件を満たすか否かを判定し、
前記制動力制御手段(6)は、前記プレチャージ許可判定手段(4)にて前記条件を満たすと判定された場合に、前記プレチャージ制御を実行させるようになっていることを特徴とする請求項13に記載の車両用ブレーキ制御装置。 - 前記周辺環境検出手段(2)は、側方車両の車両情報を得ることができるインフラ情報入力装置もしくは側方車両(500)の画像を入力する画像認識装置を含み、
前記プレチャージ許可判定手段(4)は、前記インフラ情報入力装置が得た側方車両の車両情報もしくは前記画像認識装置が得た前記側方車両(500)の画像から、前記側方車両(500)が前方へ割り込みをしてくるか否かを判定し、
前記制動力制御手段(6)は、前記プレチャージ許可判定手段(4)にて前記側方車両(500)が前方へ割り込みをしてくると判定された場合に、前記プレチャージ制御を実行するようになっていることを特徴とする請求項1ないし13のいずれか1つに記載の車両用ブレーキ制御装置。 - 前記周辺環境検出手段(2)は、側方車両までの距離を検出する距離検出手段を含み、
前記プレチャージ許可判定手段(4)は、前記距離検出手段からの出力によって求められる前記側方車両(500)までの車間距離が第3所定値(N2)よりも小さく、かつ、前記車間距離から求められる前記側方車両(500)との相対速度が第4所定値(A2)よりも小さいという条件を満たすか否かを判定し、
前記制動力制御手段(6)は、前記プレチャージ許可判定手段(4)にて前記条件を満たすと判定された場合に、前記プレチャージ制御を実行させるようになっていることを特徴とする請求項15に記載の車両用ブレーキ制御装置。 - 前記車両における車室内に設けられ、前記プレチャージ許可判定手段(4)によって検出された周囲環境が前記所定の判定基準を満たしているという判定結果を示す出力が出された場合に、それを警告する車室内警告手段(5)を備えていることを特徴とする請求項1ないし16のいずれか1つに記載の車両用ブレーキ制御装置。
- 車両に備えられた制動力制御手段(6)における摩擦部材を被摩擦部材に押し当てさせることにより、車両に対して制動力を発生させる車両用ブレーキ制御方法であって、
前記車両の外部における周囲環境を検出すると共に、この検出された周囲環境が所定の判定基準を満たしているか否かを判定し、この検出された周囲環境が前記所定の判定基準を満たしていると判定された場合には、前記摩擦部材と前記被摩擦部材との間の無効ストロークを減少もしくはキャンセルさせるプレチャージを行うことを特徴とする車両用ブレーキ制御方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004298760A JP2005297945A (ja) | 2004-03-18 | 2004-10-13 | 車両用ブレーキ制御装置およびブレーキ制御方法 |
| US11/075,654 US7234786B2 (en) | 2004-03-18 | 2005-03-10 | Vehicular brake control apparatus and vehicular brake control method |
| DE102005011415A DE102005011415A1 (de) | 2004-03-18 | 2005-03-11 | Fahrzeugbremssteuerungsvorrichtung und Fahrzeugbremssteuerungsverfahren |
| CNB2005100558061A CN100398366C (zh) | 2004-03-18 | 2005-03-16 | 车辆制动控制装置和车辆制动控制方法 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004078048 | 2004-03-18 | ||
| JP2004298760A JP2005297945A (ja) | 2004-03-18 | 2004-10-13 | 車両用ブレーキ制御装置およびブレーキ制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005297945A true JP2005297945A (ja) | 2005-10-27 |
Family
ID=34980795
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004298760A Pending JP2005297945A (ja) | 2004-03-18 | 2004-10-13 | 車両用ブレーキ制御装置およびブレーキ制御方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7234786B2 (ja) |
| JP (1) | JP2005297945A (ja) |
| CN (1) | CN100398366C (ja) |
| DE (1) | DE102005011415A1 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011219089A (ja) * | 2010-04-09 | 2011-11-04 | Navteq North America Llc | マップデータを使用する乗物escシステムのための方法及びシステム |
| JP2012011940A (ja) * | 2010-07-02 | 2012-01-19 | Honda Motor Co Ltd | 車両運転支援装置 |
| KR20120117741A (ko) * | 2009-12-12 | 2012-10-24 | 바브코 게엠베하 | 상업용 차량의 운전자 지원 시스템 및 브레이크 시스템 제어를 위한 방법 |
| JP2014065471A (ja) * | 2012-09-27 | 2014-04-17 | Mitsubishi Motors Corp | 車両の右左折時における危険回避支援装置 |
| JP2018090015A (ja) * | 2016-11-30 | 2018-06-14 | 三菱自動車工業株式会社 | 車両の運転支援装置 |
| KR20180130185A (ko) * | 2017-05-29 | 2018-12-07 | 현대모비스 주식회사 | 차량의 긴급 제동 준비 방법 |
| JPWO2021070451A1 (ja) * | 2019-10-09 | 2021-04-15 | ||
| DE112020005886T5 (de) | 2020-02-06 | 2022-10-13 | Hitachi Astemo, Ltd. | Fahrzeugsteuerungsvorrichtung |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102004030464A1 (de) * | 2004-06-24 | 2006-01-19 | Adam Opel Ag | Bremssystem mit EBS und "prefill"-Funktion sowie Verfahren zur elektronischen Bremsregelung |
| JP4900891B2 (ja) * | 2005-04-27 | 2012-03-21 | キヤノン株式会社 | 通信装置及び通信方法 |
| DE102006029979B4 (de) * | 2006-06-29 | 2026-04-23 | Robert Bosch Gmbh | Verfahren zum Betrieb einer Bremsanlage eines Kraftfahrzeuges |
| US20080018494A1 (en) * | 2006-07-24 | 2008-01-24 | Waite Robert K | Traffic Sign Beacon System |
| GB2491560B (en) | 2011-05-12 | 2014-12-03 | Jaguar Land Rover Ltd | Monitoring apparatus and method |
| JP5626168B2 (ja) * | 2011-09-27 | 2014-11-19 | 株式会社アドヴィックス | 車両用制動制御装置 |
| US8880294B2 (en) | 2011-10-04 | 2014-11-04 | Continental Automotive Systems, Inc. | Proactive electronic stability control system |
| JP5969220B2 (ja) * | 2012-02-28 | 2016-08-17 | 株式会社日本自動車部品総合研究所 | 車間距離制御装置 |
| JP5764111B2 (ja) | 2012-11-22 | 2015-08-12 | 富士重工業株式会社 | 車両用ブレーキ圧制御装置 |
| CN103277428B (zh) * | 2013-05-31 | 2015-06-03 | 安徽江淮汽车股份有限公司 | 一种湿式双离合器自动变速箱及其预充压控制方法 |
| EP2837533B2 (en) * | 2013-08-15 | 2026-03-18 | Meritor Heavy Vehicle Braking Systems (UK) Limited | A method of adjusting a brake |
| CN103629341B (zh) * | 2013-12-13 | 2016-03-02 | 安徽江淮汽车股份有限公司 | 一种湿式双离合器自动变速箱电磁阀特性曲线补偿方法 |
| DE102015000894A1 (de) | 2015-01-23 | 2016-07-28 | Knorr-Bremse Systeme für Nutzfahrzeuge GmbH | Elektronisches Parkbremssystem mit externer Ansteuerung |
| DE102015012378A1 (de) * | 2015-09-21 | 2017-03-23 | Wabco Gmbh | Verfahren zum Einstellen von Bremsdrücken eines Kraftfahrzeugs, Bremsanlage zur Durchführung des Verfahrens sowie Kraftfahrzeug |
| CN106799989B (zh) * | 2015-11-26 | 2019-11-22 | 北京宝沃汽车有限公司 | 控制系统、abs/esp控制器、车身控制器及对应的方法 |
| WO2017129430A1 (de) * | 2016-01-26 | 2017-08-03 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zum betreiben eines fahrzeug-bremssystems |
| US10449967B1 (en) | 2016-03-01 | 2019-10-22 | Allstate Insurance Company | Vehicle to vehicle telematics |
| JP6623952B2 (ja) * | 2016-03-30 | 2019-12-25 | 株式会社アドヴィックス | 車両用制動装置 |
| JP6447607B2 (ja) * | 2016-10-07 | 2019-01-09 | トヨタ自動車株式会社 | 電動ブレーキ装置 |
| US10272890B2 (en) * | 2017-06-07 | 2019-04-30 | Bendix Commercial Vehicle Systems Llc | Pneumatic panic brake assist |
| KR102185480B1 (ko) * | 2017-07-28 | 2020-12-02 | 현대모비스 주식회사 | 차량의 긴급 제동 준비 장치 |
| CN109305165B (zh) * | 2017-07-28 | 2022-04-12 | 现代摩比斯株式会社 | 智能超声系统、车辆后方碰撞警告装置及其控制方法 |
| CN107757583A (zh) * | 2017-10-13 | 2018-03-06 | 奇瑞汽车股份有限公司 | 一种低速行车主动制动方法和系统 |
| TWI687329B (zh) * | 2018-12-19 | 2020-03-11 | 宏碁股份有限公司 | 剎車控制方法、剎車系統及車輛 |
| US11620907B2 (en) * | 2019-04-29 | 2023-04-04 | Qualcomm Incorporated | Method and apparatus for vehicle maneuver planning and messaging |
| CN112026732B (zh) * | 2020-08-20 | 2022-04-12 | 中国第一汽车股份有限公司 | 预增压控制方法、装置、车辆及存储介质 |
| CN112124285B (zh) * | 2020-08-21 | 2022-04-29 | 北京汽车股份有限公司 | 车辆制动力的失效判定方法、装置及车辆 |
| CN114771484B (zh) * | 2022-06-06 | 2024-07-19 | 东风汽车有限公司东风日产乘用车公司 | 车辆的制动控制方法、车辆以及存储介质 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0696398A (ja) * | 1992-09-17 | 1994-04-08 | Fujitsu Ten Ltd | 車間距離警報装置 |
| JP2000309257A (ja) * | 1999-02-24 | 2000-11-07 | Nissan Motor Co Ltd | プレビューブレーキ制御装置 |
| JP2001122093A (ja) * | 1999-10-26 | 2001-05-08 | Wabco Gmbh & Co Ohg | 車両の自動間隔制御を行なう方法 |
| JP2001233089A (ja) * | 2000-02-21 | 2001-08-28 | Nissan Motor Co Ltd | 走行制御装置 |
| JP2002347546A (ja) * | 2001-05-29 | 2002-12-04 | Mazda Motor Corp | 車両用制御装置 |
| JP2003146162A (ja) * | 2001-11-15 | 2003-05-21 | Mazda Motor Corp | 車両用走行支援装置 |
| JP2003182400A (ja) * | 2001-12-19 | 2003-07-03 | Nissan Motor Co Ltd | 走行制御装置 |
| JP2003341492A (ja) * | 2002-05-23 | 2003-12-03 | Hino Motors Ltd | ブレーキ制御装置 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN2048835U (zh) * | 1989-03-14 | 1989-12-06 | 山东省农业科学院试验农场 | 机动车安全刹车装置 |
| DE19629229C2 (de) | 1996-07-20 | 2002-06-20 | Daimler Chrysler Ag | Verfahren zur Durchführung eines automatischen Bremsvorgangs |
| DE19633736A1 (de) * | 1996-08-21 | 1998-02-26 | Teves Gmbh Alfred | Selbsttätig aktivierte Bremsanlage |
| JP3751142B2 (ja) * | 1998-02-18 | 2006-03-01 | 本田技研工業株式会社 | 車両の制動制御装置 |
| JP4161401B2 (ja) * | 1998-04-03 | 2008-10-08 | 日産自動車株式会社 | 車両挙動制御装置 |
| DE19817326A1 (de) * | 1998-04-18 | 1999-10-21 | Continental Teves Ag & Co Ohg | Verfahren zum Verkürzen des Bremsgeweges |
| JP4119020B2 (ja) * | 1998-10-28 | 2008-07-16 | 本田技研工業株式会社 | 車両制御装置 |
| US7035735B2 (en) * | 2001-07-11 | 2006-04-25 | Robert Bosch Gmbh | Method and device for automatically triggering a deceleration in a motor vehicle |
-
2004
- 2004-10-13 JP JP2004298760A patent/JP2005297945A/ja active Pending
-
2005
- 2005-03-10 US US11/075,654 patent/US7234786B2/en not_active Expired - Fee Related
- 2005-03-11 DE DE102005011415A patent/DE102005011415A1/de not_active Ceased
- 2005-03-16 CN CNB2005100558061A patent/CN100398366C/zh not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0696398A (ja) * | 1992-09-17 | 1994-04-08 | Fujitsu Ten Ltd | 車間距離警報装置 |
| JP2000309257A (ja) * | 1999-02-24 | 2000-11-07 | Nissan Motor Co Ltd | プレビューブレーキ制御装置 |
| JP2001122093A (ja) * | 1999-10-26 | 2001-05-08 | Wabco Gmbh & Co Ohg | 車両の自動間隔制御を行なう方法 |
| JP2001233089A (ja) * | 2000-02-21 | 2001-08-28 | Nissan Motor Co Ltd | 走行制御装置 |
| JP2002347546A (ja) * | 2001-05-29 | 2002-12-04 | Mazda Motor Corp | 車両用制御装置 |
| JP2003146162A (ja) * | 2001-11-15 | 2003-05-21 | Mazda Motor Corp | 車両用走行支援装置 |
| JP2003182400A (ja) * | 2001-12-19 | 2003-07-03 | Nissan Motor Co Ltd | 走行制御装置 |
| JP2003341492A (ja) * | 2002-05-23 | 2003-12-03 | Hino Motors Ltd | ブレーキ制御装置 |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20120117741A (ko) * | 2009-12-12 | 2012-10-24 | 바브코 게엠베하 | 상업용 차량의 운전자 지원 시스템 및 브레이크 시스템 제어를 위한 방법 |
| KR101710743B1 (ko) * | 2009-12-12 | 2017-03-08 | 바브코 게엠베하 | 상업용 차량의 운전자 지원 시스템 및 브레이크 시스템 제어를 위한 방법 |
| US10899360B2 (en) | 2010-04-09 | 2021-01-26 | Here Global B.V. | Method and system for vehicle ESC system using map data |
| US9302659B2 (en) | 2010-04-09 | 2016-04-05 | Here Global B.V. | Method and system for vehicle ESC system using map data |
| US9499166B2 (en) | 2010-04-09 | 2016-11-22 | Here Global B.V. | Method and system for vehicle ESC system using map data |
| JP2011219089A (ja) * | 2010-04-09 | 2011-11-04 | Navteq North America Llc | マップデータを使用する乗物escシステムのための方法及びシステム |
| US10220856B2 (en) | 2010-04-09 | 2019-03-05 | Here Global B.V. | Method and system for vehicle ESC system using map data |
| US10543848B2 (en) | 2010-04-09 | 2020-01-28 | Here Global B.V. | Method and system for vehicle ESC system using map data |
| JP2012011940A (ja) * | 2010-07-02 | 2012-01-19 | Honda Motor Co Ltd | 車両運転支援装置 |
| JP2014065471A (ja) * | 2012-09-27 | 2014-04-17 | Mitsubishi Motors Corp | 車両の右左折時における危険回避支援装置 |
| JP2018090015A (ja) * | 2016-11-30 | 2018-06-14 | 三菱自動車工業株式会社 | 車両の運転支援装置 |
| KR20180130185A (ko) * | 2017-05-29 | 2018-12-07 | 현대모비스 주식회사 | 차량의 긴급 제동 준비 방법 |
| KR102393436B1 (ko) * | 2017-05-29 | 2022-05-03 | 현대모비스 주식회사 | 차량의 긴급 제동 준비 방법 |
| JPWO2021070451A1 (ja) * | 2019-10-09 | 2021-04-15 | ||
| WO2021070451A1 (ja) * | 2019-10-09 | 2021-04-15 | 株式会社Soken | 車両制御装置、車両制御方法、自動運転装置及び自動運転方法 |
| JP7347523B2 (ja) | 2019-10-09 | 2023-09-20 | 株式会社Soken | 車両制御装置及び車両制御方法 |
| DE112020005886T5 (de) | 2020-02-06 | 2022-10-13 | Hitachi Astemo, Ltd. | Fahrzeugsteuerungsvorrichtung |
| US12157463B2 (en) | 2020-02-06 | 2024-12-03 | Hitachi Astemo, Ltd. | Vehicle control device |
Also Published As
| Publication number | Publication date |
|---|---|
| US20050206236A1 (en) | 2005-09-22 |
| CN1669852A (zh) | 2005-09-21 |
| DE102005011415A1 (de) | 2005-10-06 |
| CN100398366C (zh) | 2008-07-02 |
| US7234786B2 (en) | 2007-06-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2005297945A (ja) | 車両用ブレーキ制御装置およびブレーキ制御方法 | |
| EP3281816B1 (en) | Vehicle traveling control apparatus | |
| US8751125B2 (en) | Vehicle control apparatus | |
| US10501084B2 (en) | Vehicle control system | |
| JP4366419B2 (ja) | 走行支援装置 | |
| CN101479137B (zh) | 车辆的减速控制装置 | |
| US7027920B2 (en) | Low-speed collision avoidance system | |
| JP6536557B2 (ja) | 運転支援装置 | |
| JP2024059946A (ja) | 変更操作支援装置 | |
| JP4985373B2 (ja) | 車両の運動制御装置 | |
| JP6384503B2 (ja) | 車両用制御装置 | |
| CN101070054A (zh) | 车间保持支持装置以及车间保持支持方法 | |
| JP6668640B2 (ja) | 運転支援装置及び運転支援方法 | |
| US12391238B2 (en) | Collision avoidance support device for a vehicle and collision avoidance support program for a vehicle | |
| JPH09286313A (ja) | 車両衝突防止装置 | |
| EP3819179B1 (en) | Controller and control method for driver-assistance system used in motorcycle, and driver-assistance system used in motorcycle | |
| JP2006205860A (ja) | 車両用走行支援装置 | |
| JP2002163797A (ja) | 車両の衝突予防装置 | |
| JP2020201734A (ja) | 車両制御装置 | |
| US11628814B2 (en) | Controller and control method for controlling behavior of motorcycle | |
| JP2002163796A (ja) | 車両の衝突予防装置 | |
| JP2005343248A (ja) | 駐車補助ブレーキ制御装置 | |
| CN106414190A (zh) | 车辆制动控制装置 | |
| JP2011126319A (ja) | 車両の走行安全制御装置 | |
| JP3932720B2 (ja) | 車両のブレーキ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071005 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20091102 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100831 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110111 |