JP2017533435A - 対象物体の動きを検知するための磁場センサ - Google Patents
対象物体の動きを検知するための磁場センサ Download PDFInfo
- Publication number
- JP2017533435A JP2017533435A JP2017522906A JP2017522906A JP2017533435A JP 2017533435 A JP2017533435 A JP 2017533435A JP 2017522906 A JP2017522906 A JP 2017522906A JP 2017522906 A JP2017522906 A JP 2017522906A JP 2017533435 A JP2017533435 A JP 2017533435A
- Authority
- JP
- Japan
- Prior art keywords
- magnetic field
- signal
- magnetoresistive element
- field sensor
- ferromagnetic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/142—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices
- G01D5/147—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices influenced by the movement of a third element, the position of Hall device and the source of magnetic field being fixed in respect to each other
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/16—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying resistance
Abstract
Description
上記の磁場センサのいくつかの実施形態において、第1の磁気抵抗素子及び第2の磁気抵抗素子は、強磁性対象物体の動きの方向に対する接線に平行なライン上に配置される。
いくつかの実施形態において、上記の磁場センサは、第1の磁気抵抗素子及び第2の磁気抵抗素子のそれぞれにおいて磁場を生成するための磁石をさらに備えることができ、強磁性対象物体は、強磁性対象物体の動きが第1の磁気抵抗素子及び第2の磁気抵抗素子において磁場の変化をもたらすような位置に配置される。
上記の磁場センサのいくつかの実施形態において、第1の磁気抵抗素子及び第2の磁気抵抗素子は、対象特徴物幅の約1/2から約2倍の間の間隔で配置される。
いくつかの実施形態において、上記の磁場センサは、第1の磁気抵抗素子及び第2の磁気抵抗素子のそれぞれにおいて磁場を生成するための磁石をさらに備えることができ、強磁性対象物体は、強磁性対象物体の動きが第1の磁気抵抗素子及び第2の磁気抵抗素子において磁場の変化をもたらすような位置に配置される。
本明細書で使用される用語「磁場検知素子」は、磁場を検知することができる様々な電子的要素を述べるために使用される。磁場検知素子は、ただしこれらに限定されないが、ホール効果素子、磁気抵抗素子又は磁気トランジスタとすることができる。知られているように、異なるタイプのホール効果素子、例えば平面ホール素子、縦型ホール素子及び円形縦型ホール(CVH)素子が存在する。また知られているように、異なるタイプの磁気抵抗素子、例えばアンチモン化インジウム(InSb)、巨大磁気抵抗(GMR)素子などの半導体磁気抵抗素子、例えばスピンバルブ、異方性磁気抵抗素子(AMR)、トンネル磁気抵抗(TMR)素子及び磁気トンネル接合(MTJ)が存在する。磁場検知素子は、単一素子とすることができる、又は代替で、様々な構成で、例えばハーフブリッジ又はフル(ホイートストン)ブリッジで配置された2つ以上の磁場検知素子を含むことができる。デバイスタイプ及び他の用途の要件に応じて、磁場検知素子は、シリコン(Si)又はゲルマニウム(Ge)などのタイプIV半導体材料、又はガリウムヒ素(GaAs)又はインジウム化合物、例えばアンチモン化インジウム(InSb)のようなタイプIII−V半導体材料から作られるデバイスとすることができる。
プロセッサは、内部プロセッサ又は内部モジュールを含むことができ、それは、プロセッサの機能、動作又は一連の動作の一部を果たす。同様に、モジュールは、内部プロセッサ又は内部モジュールを含むことができ、それは、モジュールの機能、動作又は一連の動作の一部を果たす。
ベースライン磁場は比較的小さく、これにより磁場センサ10がギア22の谷に近接したときに温度によって生じる回路変動の影響を少なくすることができるので、上記の低いベースラインは、温度効果をより容易に補償する性能も提供する。本質的に、(ゼロ付近の)エラーの増加は小さいので、回路におけるエラーは、ベースライン磁場レベル又はベースライン磁場範囲の近くで十分に修正され得る。したがって、温度又は湿度などの動作状態によるシステムのノイズ又はエラーが少ないので、歯を谷と区別するために用いられる磁場閾値は、正確性を維持している間は小さく設定され得る。
精密回転検出器出力信号272a、278aは、ギア214の回転方向によって決定される相対位相であることは明らかである。精密回転検出器出力信号272a、278aの状態遷移レートはギア214の回転速度を表すことも明らかである。
磁場センサ300は、磁石332も備えることもできる。磁石332は、磁場を生成するように構成され、磁場は、磁場検知素子304の場所において全体的に軸308に沿って方向づけられ、基板302の主面302aに全体的に平行である。
いくつかの実施形態において、磁場検知素子304は、磁気抵抗素子である。
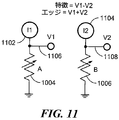
図11を参照すると、図10と同様の要素が同様の参照符号とともに示され、2個の磁気抵抗素子1004、1006(A、B)は、それぞれの電流源1102、1104とグラウンドとの間に結合される。2個の出力信号1106=V1と1108=V2が生じる。以下、上記の説明を明確にするために符号V1及びV2が用いられる。
磁場センサ1400は、幅1424をもつ特徴物、例えば1418aを有する強磁性対象物体1418の動きに応答する。強磁性対象物体1418は、図3〜6のギア322と同一又は同様であってもよく、又は図7〜9のリング磁石702と同一又は同様であってもよい。例えば1418aの特徴物は、図3〜6の例えば322aのギア歯と同一又は同様であってもよく、又は図7〜9のリング磁石702の例えば502aの磁区と同一又は同様であってもよい。
いくつかの実施形態において、2個の磁気抵抗素子1404、1408(A、C)は、例えば強磁性ギアのギア歯又は強磁性リング磁石の磁区などの対象特徴物1418aの幅1424の約1/2から約1.5倍の間の間隔1420を有する。いくつかの他の実施形態において、2個の磁気抵抗素子1404、1408(A、C)は、対象特徴物1418aの幅1424の約1/2から約2倍の間の間隔1420を有する。しかしながら、他の実施形態においては、間隔1420は、例えば、幅1424の百分の一のように幅1424の半分よりももっと小さく、又は幅1424の2倍よりも大きい。
同様に、いくつかの実施形態において、2個の磁気抵抗素子1406、1410(B、D)は、例えば強磁性ギアのギア歯又は強磁性リング磁石の磁区などの対象特徴物1418aの幅1424の約1/2から約1.5倍の間の間隔1422を有する。いくつかの他の実施形態において、2個の磁気抵抗素子1406、1410(B、D)は、対象特徴物1418aの幅1424の約1/2から約2倍の間の間隔1422を有する。しかしながら、他の実施形態においては、間隔1422は、例えば、幅1424の百分の一のように幅1424の半分よりももっと小さく、又は幅1424の2倍よりも大きい。
いくつかの他の実施形態において、2個の磁気抵抗素子1404、1406(A、B)は、対象特徴物1418aの幅1424の約1/2から約1.5倍の間の間隔1428を有する。いくつかの他の実施形態において、2個の磁気抵抗素子1404、1406(A、B)は、対象特徴物1418aの幅1424の約1/2から約2倍の間の間隔1428を有する。以下の例で用いられるいくつかの実施形態において、間隔1428は、対象特徴物1418aの幅1424と略等しい。しかしながら、他の実施形態においては、間隔1428は、例えば、幅1424の百分の一のように幅1424の半分よりももっと小さく、又は幅1424の2倍よりも大きい。
同様に、いくつかの他の実施形態において、2個の磁気抵抗素子1408、1410(C、D)は、対象特徴物1418aの幅1424の約1/2から約1.5倍の間の間隔1430を有する。いくつかの他の実施形態において、2個の磁気抵抗素子1408、1410(C、D)は、対象特徴物1418aの幅1424の約1/2から約2倍の間の間隔1430を有する。以下の例で用いられるいくつかの実施形態において、間隔1430は、対象特徴物1418aの幅1424と略等しい。しかしながら、他の実施形態においては、間隔1430は、例えば、幅1424の百分の一のように幅1424の半分よりももっと小さく、又は幅1424の2倍よりも大きい。
動作中において、4個の磁気抵抗素子1404、1406、1408、1410(A、B、C、D)は、少なくとも2個の出力信号を生成することができる。以下に示され説明される図面は、4個の磁気抵抗素子1404、1406、1408、1410(A、B、C、D)が少なくとも2個の出力信号を生成し得る様々な方法を表す。
図15を参照すると、図14と同様の要素が同様の参照符号とともに示され、磁場センサ1500は、面1502aを有する基板1502を備えることができ、面1502aは、基板1502の2個の平行な主面のうちの一方である。
いくつかの実施形態において、4個の磁気抵抗素子1404、1406、1408、1410(A、B、C、D)は、軸1514に沿って強磁性対象物体1418に近接して配置される。
軸1514は、図3〜9の軸308と平行であってもよい。
同様に、いくつかの実施形態において、2個の磁気抵抗素子1406、1410(B、D)は、例えば強磁性ギアのギア歯又は強磁性リング磁石の磁区などの対象特徴物1418aの幅1424の約1/2から約1.5倍の間の間隔1522を有する。いくつかの実施形態において、2個の磁気抵抗素子1406、1410(B、D)は、対象特徴物1418aの幅1424の約1/2から約2倍の間の間隔1522を有する。しかしながら、他の実施形態においては、間隔1522は、例えば、幅1424の百分の一のように幅1424の半分よりももっと小さく、又は幅1424の2倍よりも大きい。
いくつかの他の実施形態において、2個の磁気抵抗素子1404、1406(A、B)は、対象特徴物1418aの幅1424の約1/2から約1.5倍の間の間隔1524を有する。いくつかの他の実施形態において、2個の磁気抵抗素子1404、1406(A、B)は、対象特徴物1418aの幅1424の約1/2から約2倍の間の間隔1524を有する。しかしながら、他の実施形態においては、間隔1424は、例えば、幅1424の百分の一のように幅1424の半分よりももっと小さく、又は幅1424の2倍よりも大きい。
同様に、いくつかの他の実施形態において、2個の磁気抵抗素子1408、1410(C、D)は、対象特徴物1418aの幅1424の約1/2から約1.5倍の間の間隔1526を有する。いくつかの他の実施形態において、2個の磁気抵抗素子1408、1410(C、D)は、対象特徴物1418aの幅1424の約1/2から約2倍の間の間隔1526を有する。しかしながら、他の実施形態においては、間隔1526は、例えば、幅1424の百分の一のように幅1424の半分よりももっと小さく、又は幅1424の2倍よりも大きい。
動作中において、4個の磁気抵抗素子1404、1406、1408、1410(A、B、C、D)は、少なくとも2個の出力信号を生成することができる。以下に示され説明される図面は、4個の磁気抵抗素子1404、1406、1408、1410(A、B、C、D)が少なくとも2個の出力信号を生成し得る様々な方法を表す。
以下の図面は上記の例で用いた間隔を使用する。
2個の信号V1、V2の処理は、以下の図26と合わせて詳細に説明される。しかしながら、ここでは、この配置において、図14、15の対象特徴物1418aが4個の磁気抵抗素子1404、1406、1408、1410(A、B、C、D)の中央にあるときに、2個の信号V1、V2の和V1+V2が(正又は負の)最大の瞬時値をとるというだけで十分である。したがって、和V1+V2は、特徴信号を提供する。
図18を参照すると、図14、15と同様の要素が同様の参照符号とともに示され、4個の磁気抵抗素子1404、1406、1408、1410(A、B、C、D)は、ブリッジ配置1800内に結合される。
図19を参照すると、図14、15と同様の要素が同様の参照符号とともに示され、4個の磁気抵抗素子1404、1406、1408、1410(A、B、C、D)は、ブリッジ配置1900内に結合される。
図20を参照すると、図14、15と同様の要素が同様の参照符号とともに示され、4個の磁気抵抗素子1404、1406、1408、1410(A、B、C、D)は、ブリッジ配置2000内に結合される。
図17−20において様々なブリッジ配置が示されたが、特徴信号及びエッジ信号を生成するために用いられ得る他の同様のブリッジ配置もあり得る。
磁場センサ2100は、幅2124をもつ特徴物、例えば2118aを有する強磁性対象物体2118の動きに応答する。強磁性対象物体2118は、図3〜6のギア322と同一又は同様であってもよく、又は図7〜9のリング磁石702と同一又は同様であってもよい。例えば2118aの特徴物は、図3〜6の例えば322aのギア歯と同一又は同様であってもよく、又は図7〜9のリング磁石702の例えば502aの磁区と同一又は同様であってもよい。
いくつかの他の実施形態において、2個の磁気抵抗素子2104a、2104b(A1、A2)は、2個の磁気抵抗素子2108a、2108b(C1、C2)に対して、例えば強磁性ギアのギア歯又は強磁性リング磁石の磁区などの対象特徴物2118aの幅2124の約1/2から約1.5倍の間の間隔2120を有する。いくつかの実施形態において、2個の磁気抵抗素子2104a、2104b(A1、A2)は、2個の磁気抵抗素子2108a、2108b(C1、C2)に対して、対象特徴物2118aの幅2124の約1/2から約2倍の間の間隔2120を有する。しかしながら、他の実施形態においては、間隔2120は、例えば、幅2124の百分の一のように幅2124の半分よりももっと小さく、又は幅2124の2倍よりも大きい。
同様に、いくつかの実施形態において、2個の磁気抵抗素子2106a、2106b(B1、B2)は、2個の磁気抵抗素子2110a、2110b(D1、D2)に対して、例えば強磁性ギアのギア歯又は強磁性リング磁石の磁区などの対象特徴物2118aの幅2124の約1/2から約1.5倍の間の間隔2122を有する。いくつかの実施形態において、2個の磁気抵抗素子2106a、2106b(B1、B2)は、2個の磁気抵抗素子2110a、2110b(D1、D2)に対して、対象特徴物2118aの幅2124の約1/2から約2倍の間の間隔2122を有する。しかしながら、他の実施形態においては、間隔2122は、例えば、幅2124の百分の一のように幅2124の半分よりももっと小さく、又は幅2124の2倍よりも大きい。
いくつかの他の実施形態において、2個の磁気抵抗素子2104a、2104b(A1、A2)は、2個の磁気抵抗素子2106a、2106b(B1、B2)に対して、対象特徴物2118aの幅2124の約1/2から約1.5倍の間の間隔2124を有する。いくつかの他の実施形態において、2個の磁気抵抗素子2104a、2104b(A1、A2)は、2個の磁気抵抗素子2106a、2106b(B1、B2)に対して、対象特徴物2118aの幅2124の約1/2から約2倍の間の間隔2124を有する。しかしながら、他の実施形態においては、間隔2124は、例えば、幅2124の百分の一のように幅2124の半分よりももっと小さく、又は幅2124の2倍よりも大きい。
同様に、いくつかの他の実施形態において、2個の磁気抵抗素子2108a、2108b(C1、C2)は、2個の磁気抵抗素子2110a、2110b(D1、D2)に対して、対象特徴物2118aの幅2124の約1/2から約1.5倍の間の間隔2126を有する。いくつかの他の実施形態において、2個の磁気抵抗素子2108a、2108b(C1、C2)は、2個の磁気抵抗素子2110a、2110b(D1、D2)に対して、対象特徴物2118aの幅2124の約1/2から約2倍の間の間隔2126を有する。しかしながら、他の実施形態においては、間隔2126は、例えば、幅2124の百分の一のように幅2124の半分よりももっと小さく、又は幅2124の2倍よりも大きい。
動作中において、8個の磁気抵抗素子2104a、2104b、2106a、2106b、2108a、2108b、2110a、2110b(A1、A2、B1、B2、C1、C2、D1、D2)は、少なくとも2個の出力信号を生成することができる。以下に示され説明される図面は、8個の磁気抵抗素子2104a、2104b、2106a、2106b、2108a、2108b、2110a、2110b(A1、A2、B1、B2、C1、C2、D1、D2)が少なくとも2個の出力信号を生成し得る様々な方法を表す。
図22を参照すると、図21と同様の要素が同様の参照符号とともに示され、磁場センサ2200は、面2202aを有する基板2202を備えることができ、面2202aは、基板2202の2個の平行な主面のうちの一方である。
いくつかの実施形態において、8個の磁気抵抗素子2104a、2104b、2106a、2106b、2108a、2108b、2110a、2110b(A1、A2、B1、B2、C1、C2、D1、D2)は、軸2214に沿って強磁性対象物体2118に近接して配置される。
軸2214は、図3〜9の軸308と平行であってもよい。
同様に、いくつかの実施形態において、2個の磁気抵抗素子2106a、2106b(B1、B2)は、2個の磁気抵抗素子2110a、2110b(D1、D2)に対して、例えば強磁性ギアのギア歯又は強磁性リング磁石の磁区などの対象特徴物2118aの幅2124の約1/2から約1.5倍の間の間隔2222を有する。いくつかの実施形態において、2個の磁気抵抗素子2106a、2106b(B1、B2)は、2個の磁気抵抗素子2110a、2110b(D1、D2)に対して、対象特徴物2118aの幅2124の約1/2から約2倍の間の間隔2222を有する。しかしながら、他の実施形態においては、間隔2221は、例えば、幅2124の百分の一のように幅2124の半分よりももっと小さく、又は幅2124の2倍よりも大きい。
いくつかの他の実施形態において、2個の磁気抵抗素子2104a、2104b(A1、A2)は、2個の磁気抵抗素子2106a、2106b(B1、B2)に対して、対象特徴物2118aの幅2124の約1/2から約1.5倍の間の間隔2224を有する。いくつかの他の実施形態において、2個の磁気抵抗素子2104a、2104b(A1、A2)は、2個の磁気抵抗素子2106a、2106b(B1、B2)に対して、対象特徴物2118aの幅2124の約1/2から約2倍の間の間隔2224を有する。しかしながら、他の実施形態においては、間隔2224は、例えば、幅2124の百分の一のように幅2124の半分よりももっと小さく、又は幅2124の2倍よりも大きい。
同様に、いくつかの他の実施形態において、2個の磁気抵抗素子2108a、2108b(C1、C2)は、2個の磁気抵抗素子2110a、2110b(D1、D2)に対して、対象特徴物2118aの幅2124の約1/2から約1.5倍の間の間隔2226を有する。いくつかの他の実施形態において、2個の磁気抵抗素子2108a、2108b(C1、C2)は、2個の磁気抵抗素子2110a、2110b(D1、D2)に対して、対象特徴物2118aの幅2124の約2倍の間の間隔2226を有する。しかしながら、他の実施形態においては、間隔2226は、例えば、幅2124の百分の一のように幅2124の半分よりももっと小さく、又は幅2124の2倍よりも大きい。
動作中において、8個の磁気抵抗素子2104a、2104b、2106a、2106b、2108a、2108b、2110a、2110b(A1、A2、B1、B2、C1、C2、D1、D2)は、少なくとも2個の出力信号を生成することができる。以下に示され説明される図面は、8個の磁気抵抗素子2104a、2104b、2106a、2106b、2108a、2108b、2110a、2110b(A1、A2、B1、B2、C1、C2、D1、D2)が少なくとも2個の出力信号を生成し得る様々な方法を表す。
図23〜26を参照すると、図21、22の8個の磁気抵抗素子2104a、2104b、2106a、2106b、2108a、2108b、2110a、2110b(A1、A2、B1、B2、C1、C2、D1、D2)の4種類の異なる配置が示される。それぞれの配置において、8個の磁気抵抗素子2104a、2104b、2106a、2106b、2108a、2108b、2110a、2110b(A1、A2、B1、B2、C1、C2、D1、D2)は、2個の異なるブリッジ回路内に結合される。ブリッジから信号V1、V2を2個の別々の信号として扱う上記のブリッジとは異なり、図23〜26においては、信号V1、V2は、差動信号として扱われ、信号V1、V2の任意の和又は差は差動信号として扱われる。
図23を参照すると、図21、22と同様の要素が同様の参照符号とともに示され、8個の磁気抵抗素子2104a、2104b、2106a、2106b、2108a、2108b、2110a、2110b(A1、A2、B1、B2、C1、C2、D1、D2)は、ブリッジ配置2300a、2300b内に結合される。
2個の差動信号V1、V2の処理は、以下の図27と合わせて詳細に説明される。しかしながら、ここでは、この配置において、図21、22の対象特徴物2118aが8個の磁気抵抗素子2104a、2104b、2106a、2106b、2108a、2108b、2110a、2110b(A1、A2、B1、B2、C1、C2、D1、D2)の中央にあるときに、2個の信号V1、V2の和V1+V2が(正又は負の)最大の瞬時値をとるというだけで十分である。したがって、和V1+V2は、特徴信号を提供する。
図24を参照すると、図21、22と同様の要素が同様の参照符号とともに示され、8個の磁気抵抗素子2104a、2104b、2106a、2106b、2108a、2108b、2110a、2110b(A1、A2、B1、B2、C1、C2、D1、D2)は、ブリッジ配置2400a、2400b内に結合される。
2個の差動信号V1、V2の処理は、以下の図27と合わせて詳細に説明される。しかしながら、ここでは、この配置において、図21、22の対象特徴物2118aが8個の磁気抵抗素子2104a、2104b、2106a、2106b、2108a、2108b、2110a、2110b(A1、A2、B1、B2、C1、C2、D1、D2)の中央にあるときに、2個の信号V1、V2の和V1+V2が(正又は負の)最大の瞬時値をとるというだけで十分である。したがって、和V1+V2は、特徴信号を提供する。
図25を参照すると、図21、22と同様の要素が同様の参照符号とともに示され、8個の磁気抵抗素子2104a、2104b、2106a、2106b、2108a、2108b、2110a、2110b(A1、A2、B1、B2、C1、C2、D1、D2)は、ブリッジ配置2500a、2500b内に結合される。
2個の差動信号V1、V2の処理は、以下の図27と合わせて詳細に説明される。しかしながら、ここでは、この配置において、図21、22の対象特徴物2118aが8個の磁気抵抗素子2104a、2104b、2106a、2106b、2108a、2108b、2110a、2110b(A1、A2、B1、B2、C1、C2、D1、D2)の中央にあるときに、2個の信号V1、V2の和V1+V2が(正又は負の)最大の瞬時値をとるというだけで十分である。したがって、和V1+V2は、特徴信号を提供する。
図26を参照すると、図21、22と同様の要素が同様の参照符号とともに示され、8個の磁気抵抗素子2104a、2104b、2106a、2106b、2108a、2108b、2110a、2110b(A1、A2、B1、B2、C1、C2、D1、D2)は、ブリッジ配置2600a、2600b内に結合される。
2個の差動信号V1、V2の処理は、以下の図27と合わせて詳細に説明される。しかしながら、ここでは、この配置において、図21、22の対象特徴物2118aが8個の磁気抵抗素子2104a、2104b、2106a、2106b、2108a、2108b、2110a、2110b(A1、A2、B1、B2、C1、C2、D1、D2)の中央にあるときに、2個の信号V1、V2の和V1+V2が(正又は負の)最大の瞬時値をとるというだけで十分である。したがって、和V1+V2は、特徴信号を提供する。
図23〜26において様々な2個のブリッジ配置が示されたが、特徴信号及びエッジ信号を生成するために用いられ得る他の同様のブリッジ配置もあり得る。
デジタルローパスフィルタ2712は、変換信号を受信するために結合され、ローパスフィルタ信号を生成するように構成される。例えばデジタルノッチフィルタなどの他のデジタルフィルタ2714は、ローパスフィルタ信号を受信するために結合され、ノッチフィルタ信号2714aを生成するように構成され得る。しかしながら、いくつかの他の実施形態においては、デジタルフィルタ2714は、デジタルローパスフィルタであってもよい。
デジタルローパスフィルタ2722は、変換信号を受信するために結合され、ローパスフィルタ信号を生成するように構成される。例えばデジタルノッチフィルタなどの他のデジタルフィルタ2724は、ローパスフィルタ信号を受信するために結合され、ノッチフィルタ信号2724aを生成するように構成され得る。
電子回路2701は、信号2726aとして速度、方向、振動プロセッサ2716へ供給する設定値を保持するように構成される電気的消去再書き込み可能な読み出し専用メモリ(EEPROM)2726を備えることができる。EEPROM2726に記憶された値は、これらに限られないが、静的又は計算された閾値(例えば図28の2810a、2810b、2812a、2812b参照)、アクションが行われたときに決定され得るピークの回数及び谷の値、及びPOSCOMP信号(図28の2806、2808参照)の遷移に関連するエッジカウント値、及び/又は以下で説明されるピーク間の値を特定するために用いられる上記のエッジ及び特徴信号の信号値、を含み得る。いくつかの実施形態において、EEPROM2726は、上記のエッジ信号又は上記の特徴信号のどちらが信号2716aにおいて出力パルスのためにタイミングマーカを提供するのに使用されるかを表す値も記憶し得る。出力パルスは、図28と合わせて以下により詳細に説明される。
2個のツェナーダイオード2734、2736は、出力電流生成器2728をまたいで直列に結合され、静電(ESD)保護を提供する。
図27の速度、方向、振動プロセッサ2716によって生成された信号2716aは、速度、方向、ならびに任意で振動、及び/又は自己テスト結果を様々な異なる方法で1つの信号にエンコードすることができる。いくつかの方法は、例えば、2006年4月11日発行の米国特許第7,026,808号、2014年8月10日発行の米国特許第7,772,838号、2014年1月7日発行の米国特許第8,624,588号において説明され、これらの特許は本出願の譲受人に譲渡され、記載内容の全体が本明細書に援用される。他のフォーマットも可能である。
本特許の主題である様々なコンセプト、構造、及び技術を提供する好ましい実施形態を説明し、これらのコンセプト、構造、及び技術を組み込む他の実施形態が用いられ得ることが明らかとなった。したがって、特許の範囲を記載された実施形態に限定すべきではなく、むしろ以下の特許請求の精神及び範囲によってのみ限定すべきであることが提言される。
Claims (30)
- 対象特徴物幅をもつ強磁性対象物体特徴物を有する強磁性対象物体の動きを検知するための磁場センサであって、
基板と、
前記強磁性対象物体特徴物の動きに応答する第1の信号を生成するための、前記基板上に配置された第1の磁気抵抗素子と、
前記強磁性対象物体特徴物の動きに応答する第2の信号を生成するための、前記基板上に配置された第2の磁気抵抗素子と、
前記第1の信号と前記第2の信号とを合成して、強磁性対象物体特徴物が前記第1の磁気抵抗素子及び前記第2の磁気抵抗素子の中央にあるときに最大値をとる特徴信号を生成するように構成される、前記基板上に配置された第1の合成回路と、
前記第1の信号と前記第2の信号とを合成して、前記第1の磁気抵抗素子が対象特徴物のエッジの一方側にあり前記第2の磁気抵抗素子が前記同じエッジの反対側にあるときに最大値をとるエッジ信号を生成するように構成される、前記基板上に配置された第2の合成回路と、
を含む、磁場センサ。 - 前記第1の磁気抵抗素子及び前記第2の磁気抵抗素子は、前記強磁性対象物体の動きの方向に対する接線に平行なライン上に配置される、
請求項1に記載の磁場センサ。 - 前記第1の磁気抵抗素子及び前記第2の磁気抵抗素子は、前記対象特徴物幅の約1/2から約2倍の間の間隔で配置される、
請求項2に記載の磁場センサ。 - 前記第1の磁気抵抗素子及び前記第2の磁気抵抗素子のそれぞれにおいて磁場を生成するための磁石をさらに含み、前記強磁性対象物体は、前記強磁性対象物体の動きが前記第1の磁気抵抗素子及び前記第2の磁気抵抗素子において前記磁場の変化をもたらすような位置に配置される、
請求項3に記載の磁場センサ。 - 前記強磁性対象物体は、交互のN極及びS極を有するリング磁石を含み、前記第1の磁気抵抗素子及び前記第2の磁気抵抗素子のそれぞれにおいて磁場を生成し、前記強磁性対象物体は、前記強磁性対象物体の動きが前記第1の磁気抵抗素子及び前記第2の磁気抵抗素子において前記磁場の変化をもたらすような位置に配置される、
請求項3に記載の磁場センサ。 - 前記基板上に配置され、前記特徴信号及び前記エッジ信号を受信するために結合され、前記特徴信号と前記エッジ信号との間の位相差の符号を計算して前記強磁性対象物体の動きの方向のインジケーションを生成するように構成される電子回路をさらに含む、
請求項3に記載の磁場センサ。 - 前記基板上に配置され、前記特徴信号及び前記エッジ信号を受信するために結合された電子回路をさらに含み、前記電子回路は、前記エッジ信号を1又は複数の閾値と比較して第1の2値信号を生成するよう動作可能であり、前記特徴信号を他の1又は複数の閾値と比較して第2の2値信号を生成するよう動作可能であり、前記磁場センサによって生成された出力信号は、前記第1の2値信号又は前記第2の2値信号の選択された一方の状態遷移との整合を特定する信号エンコーディングを含む、
請求項3に記載の磁場センサ。 - 前記出力信号は、前記対象物体の前記動きの速度を表すパルスレート、及び、前記第1の2値信号又は前記第2の2値信号の選択された一方の状態遷移に整合するパルスエッジ、を有するパルスを含む、
請求項7に記載の磁場センサ。 - 前記第1の2値信号と前記第2の2値信号との間の相対位相は、前記強磁性対象物体の前記動きの方向を表し、前記パルスは、前記強磁性対象物体の前記動きの方向を表すパルス幅を含む、
請求項8に記載の磁場センサ。 - 前記基板は、第1及び第2の平行な最大面を含み、前記第1の磁気抵抗素子及び前記第2の磁気抵抗素子は、前記基板の前記第1の最大面内又は前記基板の前記第1の最大面上に配置され、前記強磁性対象物体は、第1及び第2の平行な最大面を有し、前記基板の前記第1の最大面は、前記強磁性対象物体の前記第1の最大面に対して実質的に平行である、
請求項1に記載の磁場センサ。 - 前記基板上に配置された第1の抵抗素子と、
前記基板上に配置された第2の抵抗素子と、をさらに含み、
前記第1の磁気抵抗素子及び前記第2の磁気抵抗素子は、前記第1の抵抗素子及び前記第2の抵抗素子とともにフルブリッジ回路内に結合され、前記フルブリッジ回路は、前記第1の信号が生成される第1のノード及び前記第2の信号が生成される第2のノードを有する、
請求項1に記載の磁場センサ。 - 前記第1の磁気抵抗素子及び前記第2の磁気抵抗素子は、前記強磁性対象物体の動きの方向に対する接線に平行なライン上に配置される、
請求項11に記載の磁場センサ。 - 前記第1の磁気抵抗素子及び前記第2の磁気抵抗素子は、前記対象特徴物幅の約1/2から約2倍の間の間隔で配置される、
請求項12に記載の磁場センサ。 - 前記第1の磁気抵抗素子及び前記第2の磁気抵抗素子のそれぞれにおいて磁場を生成するための磁石をさらに含み、前記強磁性対象物体は、前記強磁性対象物体の動きが前記第1の磁気抵抗素子及び前記第2の磁気抵抗素子において前記磁場の変化をもたらすような位置に配置される、
請求項13に記載の磁場センサ。 - 前記強磁性対象物体は、交互のN極及びS極を有するリング磁石を含み、前記第1の磁気抵抗素子及び前記第2の磁気抵抗素子のそれぞれにおいて磁場を生成し、前記強磁性対象物体は、前記強磁性対象物体の動きが前記第1の磁気抵抗素子及び前記第2の磁気抵抗素子において前記磁場の変化をもたらすような位置に配置される、
請求項13に記載の磁場センサ。 - 前記基板上に配置され、前記特徴信号及び前記エッジ信号を受信するために結合され、前記特徴信号と前記エッジ信号との間の位相差の符号を計算して前記強磁性対象物体の動きの方向のインジケーションを生成するように構成される電子回路をさらに含む、
請求項13に記載の磁場センサ。 - 前記基板上に配置され、前記特徴信号及び前記エッジ信号を受信するために結合された電子回路をさらに含み、前記電子回路は、前記エッジ信号を1又は複数の閾値と比較して第1の2値信号を生成するよう動作可能であり、前記特徴信号を他の1又は複数の閾値と比較して第2の2値信号を生成するよう動作可能であり、前記磁場センサによって生成された出力信号は、前記第1の2値信号又は前記第2の2値信号の選択された一方の状態遷移との整合を特定する信号エンコーディングを含む、
請求項13に記載の磁場センサ。 - 前記出力信号は、前記対象物体の前記動きの速度を表すパルスレート、及び、前記第1の2値信号又は前記第2の2値信号の選択された一方の状態遷移に整合するパルスエッジ、を有するパルスを含む、
請求項17に記載の磁場センサ。 - 前記第1の2値信号と前記第2の2値信号との間の相対位相は、前記強磁性対象物体の前記動きの方向を表し、前記パルスは、前記強磁性対象物体の前記動きの方向を表すパルス幅を含む、
請求項18に記載の磁場センサ。 - 前記基板は、第1及び第2の平行な最大面を含み、前記第1の磁気抵抗素子及び前記第2の磁気抵抗素子は、前記基板の前記第1の最大面内又は前記基板の前記第1の最大面上に配置され、前記強磁性対象物体は、第1及び第2の平行な最大面を有し、前記基板の前記第1の最大面は、前記強磁性対象物体の前記第1の最大面に対して実質的に平行である、
請求項11に記載の磁場センサ。 - 前記基板上に配置された第3の磁気抵抗素子と、
前記基板上に配置された第4の磁気抵抗素子と、をさらに含み、
前記第1の磁気抵抗素子及び前記第2の磁気抵抗素子は、前記第3の磁気抵抗素子及び前記第4の磁気抵抗素子とともにフルブリッジ回路内に結合され、前記フルブリッジ回路は、前記第1の信号が生成される第1のノード及び前記第2の信号が生成される第2のノードを有する、
請求項1に記載の磁場センサ。 - 前記第1の磁気抵抗素子及び前記第2の磁気抵抗素子は、前記強磁性対象物体の動きの方向に対する接線に平行な第1のライン上に配置され、前記第3の磁気抵抗素子及び前記第4の磁気抵抗素子は、前記強磁性対象物体から前記第1のラインよりも遠くにある第2のライン上に配置される、
請求項21に記載の磁場センサ。 - 前記第1の磁気抵抗素子及び前記第2の磁気抵抗素子は、前記対象特徴物幅の約1/2から約2倍の間の間隔で配置される、
請求項21に記載の磁場センサ。 - 前記第1の磁気抵抗素子及び前記第2の磁気抵抗素子のそれぞれにおいて磁場を生成するための磁石をさらに含み、前記強磁性対象物体は、前記強磁性対象物体の動きが前記第1の磁気抵抗素子及び前記第2の磁気抵抗素子において前記磁場の変化をもたらすような位置に配置される、
請求項21に記載の磁場センサ。 - 前記強磁性対象物体は、交互のN極及びS極を有するリング磁石を含み、前記第1の磁気抵抗素子及び前記第2の磁気抵抗素子のそれぞれにおいて磁場を生成し、前記強磁性対象物体は、前記強磁性対象物体の動きが前記第1の磁気抵抗素子及び前記第2の磁気抵抗素子において前記磁場の変化をもたらすような位置に配置される、
請求項23に記載の磁場センサ。 - 前記基板上に配置され、前記特徴信号及び前記エッジ信号を受信するために結合され、前記特徴信号と前記エッジ信号との間の位相差の符号を計算して前記強磁性対象物体の動きの方向のインジケーションを生成するように構成される電子回路をさらに含む、
請求項23に記載の磁場センサ。 - 前記基板上に配置され、前記特徴信号及び前記エッジ信号を受信するために結合された電子回路をさらに含み、前記電子回路は、前記エッジ信号を1又は複数の閾値と比較して第1の2値信号を生成するよう動作可能であり、前記特徴信号を他の1又は複数の閾値と比較して第2の2値信号を生成するよう動作可能であり、前記磁場センサによって生成された出力信号は、前記第1の2値信号又は前記第2の2値信号の選択された一方の状態遷移との整合を特定する信号エンコーディングを含む、
請求項23に記載の磁場センサ。 - 前記出力信号は、前記対象物体の前記動きの速度を表すパルスレート、及び、前記第1の2値信号又は前記第2の2値信号の選択された一方の状態遷移に整合するパルスエッジ、を有するパルスを含む、
請求項27に記載の磁場センサ。 - 前記第1の2値信号と前記第2の2値信号との間の相対位相は、前記強磁性対象物体の前記動きの方向を表し、前記パルスは、前記強磁性対象物体の前記動きの方向を表すパルス幅を含む、
請求項28に記載の磁場センサ。 - 前記基板は、第1及び第2の平行な最大面を含み、前記第1の磁気抵抗素子、前記第2の磁気抵抗素子、前記第3の磁気抵抗素子、及び、前記第4の磁気抵抗素子は、前記基板の前記第1の最大面内又は前記基板の前記第1の最大面上に配置され、前記強磁性対象物体は、第1及び第2の平行な最大面を有し、前記基板の前記第1の最大面は、前記強磁性対象物体の前記第1の最大面に対して実質的に平行である、
請求項21に記載の磁場センサ。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/529,606 | 2014-10-31 | ||
| US14/529,606 US9823090B2 (en) | 2014-10-31 | 2014-10-31 | Magnetic field sensor for sensing a movement of a target object |
| PCT/US2015/055230 WO2016108992A2 (en) | 2014-10-31 | 2015-10-13 | Magnetic field sensor for sensing a movement of a target object |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017533435A true JP2017533435A (ja) | 2017-11-09 |
| JP2017533435A5 JP2017533435A5 (ja) | 2018-10-25 |
| JP6689839B2 JP6689839B2 (ja) | 2020-04-28 |
Family
ID=55802448
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017522906A Active JP6689839B2 (ja) | 2014-10-31 | 2015-10-13 | 対象物体の動きを検知するための磁場センサ |
Country Status (5)
| Country | Link |
|---|---|
| US (2) | US9823090B2 (ja) |
| EP (1) | EP3209974B1 (ja) |
| JP (1) | JP6689839B2 (ja) |
| KR (1) | KR102469714B1 (ja) |
| WO (1) | WO2016108992A2 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10449420B2 (en) * | 2008-01-10 | 2019-10-22 | Acushnet Company | Multi-layer core golf ball |
| US9823092B2 (en) | 2014-10-31 | 2017-11-21 | Allegro Microsystems, Llc | Magnetic field sensor providing a movement detector |
| CN104596605B (zh) * | 2015-02-04 | 2019-04-26 | 江苏多维科技有限公司 | 一种磁自动化流量记录器 |
| US11199424B2 (en) | 2018-01-31 | 2021-12-14 | Allegro Microsystems, Llc | Reducing angle error in a magnetic field angle sensor |
| US10866117B2 (en) | 2018-03-01 | 2020-12-15 | Allegro Microsystems, Llc | Magnetic field influence during rotation movement of magnetic target |
| US11255700B2 (en) | 2018-08-06 | 2022-02-22 | Allegro Microsystems, Llc | Magnetic field sensor |
| US10823586B2 (en) | 2018-12-26 | 2020-11-03 | Allegro Microsystems, Llc | Magnetic field sensor having unequally spaced magnetic field sensing elements |
| TWI693418B (zh) | 2019-03-22 | 2020-05-11 | 宇能電科技股份有限公司 | 校正磁場產生裝置及其具有自我校正磁場能力的磁場感測器與校正方法 |
| US20200309983A1 (en) * | 2019-03-29 | 2020-10-01 | Ablic Inc. | Magnetic substance detection sensor |
| US11327127B2 (en) * | 2019-07-10 | 2022-05-10 | Allegro Microsystems, Llc | Magnetic field sensor with reduced influence of external stray magnetic fields |
| US11175359B2 (en) | 2019-08-28 | 2021-11-16 | Allegro Microsystems, Llc | Reducing voltage non-linearity in a bridge having tunneling magnetoresistance (TMR) elements |
| US11237020B2 (en) | 2019-11-14 | 2022-02-01 | Allegro Microsystems, Llc | Magnetic field sensor having two rows of magnetic field sensing elements for measuring an angle of rotation of a magnet |
| US11280637B2 (en) | 2019-11-14 | 2022-03-22 | Allegro Microsystems, Llc | High performance magnetic angle sensor |
| US11467233B2 (en) | 2020-03-18 | 2022-10-11 | Allegro Microsystems, Llc | Linear bridges having nonlinear elements |
| US11408948B2 (en) | 2020-03-18 | 2022-08-09 | Allegro Microsystems, Llc | Linear bridge having nonlinear elements for operation in high magnetic field intensities |
| US11525705B1 (en) * | 2021-07-13 | 2022-12-13 | Allegro Microsystems, Llc | Magnetic-field sensor with test pin for diagnostic assessment of target validity, target placement and/or control of signal range and/or offset |
| US11598655B2 (en) | 2021-07-13 | 2023-03-07 | Allegro Microsystems, Llc | Magnetic-field sensor with test pin for control of signal range and/or offset |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0504583A1 (de) * | 1991-02-18 | 1992-09-23 | ITT Automotive Europe GmbH | Verfahren und Anordnung zur Erkennung einer Bewegungsrichtung, insbesondere einer Drehrichtung |
| JP2009150732A (ja) * | 2007-12-19 | 2009-07-09 | Asahi Kasei Electronics Co Ltd | 位置検出装置 |
| US20090326860A1 (en) * | 2008-06-26 | 2009-12-31 | Infineon Technologies Ag | Rotation sensing method and system |
Family Cites Families (446)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3132337A (en) | 1960-09-12 | 1964-05-05 | Ibm | Variable reluctance slotted drum position indicating device |
| US3195043A (en) | 1961-05-19 | 1965-07-13 | Westinghouse Electric Corp | Hall effect proximity transducer |
| DE1514822A1 (de) | 1964-08-14 | 1969-06-26 | Telefunken Patent | Verfahren zur Herstellung einer Halbleiteranordnung |
| US3607528A (en) | 1968-02-08 | 1971-09-21 | James S Gassaway | Magnetic memory members and methods of making the same |
| US3661061A (en) | 1969-05-05 | 1972-05-09 | Atomic Energy Commission | Picture position finder |
| US3611138A (en) | 1970-03-05 | 1971-10-05 | Gen Motors Corp | Tachometer system including an rf signal modulator and detector |
| FR2114148A5 (ja) | 1970-11-16 | 1972-06-30 | Crouzet Sa | |
| DE2518054C2 (de) | 1975-04-23 | 1984-08-02 | Siemens AG, 1000 Berlin und 8000 München | Anordnung zur Bestimmung des Drehsinns einer Drehbewegung |
| US4048670A (en) | 1975-06-30 | 1977-09-13 | Sprague Electric Company | Stress-free hall-cell package |
| FR2396417A1 (fr) | 1977-06-29 | 1979-01-26 | Tokyo Shibaura Electric Co | Composant semi-conducteur comprenant une resistance |
| US4204317A (en) | 1977-11-18 | 1980-05-27 | The Arnold Engineering Company | Method of making a lead frame |
| US4188605A (en) | 1978-07-21 | 1980-02-12 | Stout Glenn M | Encapsulated Hall effect device |
| US4283643A (en) | 1979-05-25 | 1981-08-11 | Electric Power Research Institute, Inc. | Hall sensing apparatus |
| US4315523A (en) | 1980-03-06 | 1982-02-16 | American Flow Systems, Inc. | Electronically controlled flow meter and flow control system |
| DE3030620A1 (de) | 1980-08-13 | 1982-03-11 | Siemens AG, 1000 Berlin und 8000 München | Anordnung zur aenderung der elektrischen schaltungskonfiguration von integrierten halbleiterschaltkreisen |
| JPS5886405A (ja) * | 1981-11-18 | 1983-05-24 | Nec Corp | 角度検出器 |
| US4670715A (en) | 1983-01-28 | 1987-06-02 | Caterpillar Inc. | Frictionally supported gear tooth sensor with self-adjusting air gap |
| CA1238389A (en) | 1983-02-07 | 1988-06-21 | Nl Industries, Inc. | Spinner transducer |
| JPS60152256A (ja) | 1984-01-18 | 1985-08-10 | Atsugi Motor Parts Co Ltd | モ−タの製造方法 |
| JPS60257546A (ja) | 1984-06-04 | 1985-12-19 | Mitsubishi Electric Corp | 半導体装置及びその製造方法 |
| CH664632A5 (de) | 1984-08-16 | 1988-03-15 | Landis & Gyr Ag | Schaltungsanordnung zur kompensation von schwankungen des uebertragungsfaktors eines magnetfeldsensors. |
| US4650193A (en) | 1984-12-10 | 1987-03-17 | Spalding & Evenflo Companies, Inc. | Golf ball |
| US4614111A (en) | 1985-02-15 | 1986-09-30 | Wolff George D | Position sensor for fuel injection apparatus |
| SE447608B (sv) | 1985-04-03 | 1986-11-24 | Hightech Network Ab | Forfarande och anordning for instellning av en digital regulator |
| KR910002313B1 (ko) | 1985-05-10 | 1991-04-11 | 아사히가세이고오교 가부시끼가이샤 | 자전 변환소자 |
| US4719419A (en) | 1985-07-15 | 1988-01-12 | Harris Graphics Corporation | Apparatus for detecting a rotary position of a shaft |
| JPS6234316A (ja) | 1985-08-07 | 1987-02-14 | Victor Co Of Japan Ltd | 磁気抵抗効果素子を用いた磁気ヘツド、及びその製作法 |
| JPH0665967B2 (ja) | 1985-08-27 | 1994-08-24 | 株式会社エスジー | アブソリュート回転位置検出装置 |
| JPS62235523A (ja) | 1986-03-19 | 1987-10-15 | Honda Motor Co Ltd | 回転角センサの製造方法 |
| US4833406A (en) | 1986-04-17 | 1989-05-23 | Household Commercial Financial Services Inc. | Temperature compensated Hall-effect sensor apparatus |
| US4649796A (en) | 1986-06-18 | 1987-03-17 | The United States Of America As Represented By The Secretary Of The Army | Method and apparatus for setting a projectile fuze during muzzle exit |
| US4745363A (en) | 1986-07-16 | 1988-05-17 | North American Philips Corporation | Non-oriented direct coupled gear tooth sensor using a Hall cell |
| DE3632624C1 (de) | 1986-09-25 | 1988-03-10 | Balluff Gebhard Feinmech | Stoerfeldunempfindlicher Naeherungsschalter |
| JPS6384176A (ja) | 1986-09-29 | 1988-04-14 | Toshiba Corp | 磁界収束型ホ−ル素子及びその製造方法 |
| US4746859A (en) | 1986-12-22 | 1988-05-24 | Sundstrand Corporation | Power and temperature independent magnetic position sensor for a rotor |
| US4772929A (en) | 1987-01-09 | 1988-09-20 | Sprague Electric Company | Hall sensor with integrated pole pieces |
| US4789826A (en) | 1987-03-19 | 1988-12-06 | Ampex Corporation | System for sensing the angular position of a rotatable member using a hall effect transducer |
| US4760285A (en) | 1987-03-30 | 1988-07-26 | Honeywell Inc. | Hall effect device with epitaxal layer resistive means for providing temperature independent sensitivity |
| JPS63263782A (ja) | 1987-04-22 | 1988-10-31 | Hitachi Ltd | 磁電変換素子 |
| FR2614695B1 (fr) | 1987-04-28 | 1989-06-23 | Commissariat Energie Atomique | Procede de numerisation et de linearisation d'un capteur a caracteristique periodique quasi sinusoidale et dispositif correspondant |
| GB8711559D0 (en) | 1987-05-15 | 1987-06-17 | Ssd Ltd | Shaft encoders |
| US5012322A (en) | 1987-05-18 | 1991-04-30 | Allegro Microsystems, Inc. | Semiconductor die and mounting assembly |
| JPH0612266B2 (ja) | 1987-05-30 | 1994-02-16 | 株式会社安川電機 | 多回転式絶対値エンコ−ダ |
| US4823075A (en) | 1987-10-13 | 1989-04-18 | General Electric Company | Current sensor using hall-effect device with feedback |
| US5078944A (en) | 1987-11-02 | 1992-01-07 | Matsushita Electric Industrial Co., Ltd. | Method for making permanent magnet type demagnetizing head |
| DE3743521A1 (de) | 1987-12-22 | 1989-07-06 | Foerster Inst Dr Friedrich | Vorrichtung zum pruefen von halbzeug |
| US4983916A (en) | 1988-01-26 | 1991-01-08 | Yamaha Corporation | Compact magnetic encoder |
| ES2039019T3 (es) | 1988-04-21 | 1993-08-16 | Landis & Gyr Business Support Ag | Circuito semiconductor integrado con un sensor de campo magnetico hecho de material semiconductor. |
| EP0357013A3 (en) | 1988-09-02 | 1991-05-15 | Honeywell Inc. | Magnetic field measuring circuit |
| JPH0248882U (ja) | 1988-09-30 | 1990-04-04 | ||
| US4910861A (en) | 1988-10-07 | 1990-03-27 | Emerson Electric Co. | Method of manufacturing retention structure for electric motor rotor magnets |
| KR930004094Y1 (ko) | 1988-10-11 | 1993-06-30 | 미쓰비시전기 주식회사 | 홀 효과형 센서장치 |
| JPH02116753A (ja) | 1988-10-26 | 1990-05-01 | Mitsubishi Electric Corp | 回転方向検出装置 |
| JPH02149013A (ja) | 1988-11-30 | 1990-06-07 | Toshiba Corp | 発振回路 |
| EP0388584B1 (fr) | 1989-01-17 | 1993-10-27 | Gec Alsthom Sa | Dispositif de repérage de position d'un arbre en acier en rotation comportant une piste formée par une bande à propriétés électriques discontinues et procédé de fabrication de ladite piste |
| KR910004884B1 (ko) | 1989-02-01 | 1991-07-15 | 한국식품개발연구원 | 유지류의 산화억제방법 |
| US5789915A (en) | 1989-02-17 | 1998-08-04 | Nartron Corporation | Magnetic field energy responsive position sensing apparatus and method |
| US4935698A (en) | 1989-03-03 | 1990-06-19 | Sprague Electric Company | Sensor having dual Hall IC, pole piece and magnet |
| JPH02236183A (ja) | 1989-03-09 | 1990-09-19 | Mitsubishi Electric Corp | ホールセンサ装置及びその製造方法 |
| US6299550B1 (en) | 1989-03-10 | 2001-10-09 | Spalding Sports Worldwide, Inc. | Golf ball with multiple shell layers |
| US5196794A (en) | 1989-03-14 | 1993-03-23 | Mitsubishi Denki K.K. | Hall-effect sensor with integrally molded frame, magnet, flux guide and insulative film |
| JPH0329817A (ja) | 1989-06-28 | 1991-02-07 | Fanuc Ltd | ワイヤレス手動エンコーダ |
| JP2522214B2 (ja) | 1989-10-05 | 1996-08-07 | 日本電装株式会社 | 半導体装置およびその製造方法 |
| US5121289A (en) | 1990-01-31 | 1992-06-09 | Honeywell Inc. | Encapsulatable sensor assembly |
| US5021493A (en) | 1990-03-21 | 1991-06-04 | The Goodyear Tire & Rubber Company | Rubber composition and tire with component(s) thereof |
| US5045920A (en) | 1990-06-28 | 1991-09-03 | Allegro Microsystems, Inc. | Dual-Hall ferrous-article-proximity sensor |
| DE4031560C2 (de) | 1990-10-05 | 1993-10-14 | Dieter Prof Dr Ing Seitzer | Stromsensor mit magnetfeldempfindlichen Bauelementen und Verwendung |
| JPH04152688A (ja) | 1990-10-17 | 1992-05-26 | Fujitsu Ltd | 磁気抵抗素子 |
| US5038130A (en) | 1990-11-06 | 1991-08-06 | Santa Barbara Research Center | System for sensing changes in a magnetic field |
| US5185919A (en) | 1990-11-19 | 1993-02-16 | Ford Motor Company | Method of manufacturing a molded fuel injector |
| US5139973A (en) | 1990-12-17 | 1992-08-18 | Allegro Microsystems, Inc. | Method for making a semiconductor package with the distance between a lead frame die pad and heat spreader determined by the thickness of an intermediary insulating sheet |
| US5216405A (en) | 1991-01-14 | 1993-06-01 | General Motors Corporation | Package for the magnetic field sensitive device |
| US5167896A (en) | 1991-01-16 | 1992-12-01 | Kyowa Electric & Chemical Co., Ltd. | Method of manufacturing a front cabinet for use with a display |
| US5349743A (en) | 1991-05-02 | 1994-09-27 | At&T Bell Laboratories | Method of making a multilayer monolithic magnet component |
| DE4114835A1 (de) | 1991-05-07 | 1992-11-12 | Vdo Schindling | Schalteinrichtung, insbesondere zur verwendung in kraftfahrzeugen |
| US5491633A (en) | 1991-05-20 | 1996-02-13 | General Motors Corporation | Position sensor for electromechanical suspension |
| JP2682270B2 (ja) | 1991-06-19 | 1997-11-26 | 日本電気株式会社 | 磁気抵抗効果素子回路 |
| JP2958821B2 (ja) | 1991-07-08 | 1999-10-06 | 株式会社村田製作所 | ソリッドインダクタ |
| DE69232236T2 (de) | 1991-07-16 | 2002-08-08 | Asahi Chemical Ind | Halbleiter-sensor und seine herstellungsmethode |
| EP0537419A1 (de) | 1991-10-09 | 1993-04-21 | Landis & Gyr Business Support AG | Anordnung mit einem integrierten Magnetfeldsensor sowie einem ferromagnetischen ersten und zweiten Magnetfluss-Konzentrator und Verfahren zum Einbau einer Vielzahl von Anordnungen in je einem Kunststoffgehäuse |
| KR940004952B1 (ko) | 1991-11-08 | 1994-06-07 | 주식회사 금성사 | 직류모터 가동 제어장치 |
| US5247278A (en) | 1991-11-26 | 1993-09-21 | Honeywell Inc. | Magnetic field sensing device |
| DE4141959A1 (de) | 1991-12-19 | 1993-06-24 | Swf Auto Electric Gmbh | Drehzahlsensor, insbesondere zahnradsensor |
| CA2080177C (en) | 1992-01-02 | 1997-02-25 | Edward Allan Highum | Electro-magnetic shield and method for making the same |
| US5306760A (en) | 1992-01-09 | 1994-04-26 | Lisco, Inc. | Improved golf ball cover compositions containing high levels of fatty acid salts |
| US5312857A (en) | 1992-01-09 | 1994-05-17 | Lisco, Inc. | Golf ball cover compositions containing high levels of metal stearates |
| DE69324242T2 (de) | 1992-01-31 | 1999-08-19 | Northrop Grumman Corp | Wirbelstromsondensystem in einem array |
| US5210493A (en) | 1992-02-27 | 1993-05-11 | General Motors Corporation | Method for embedding wires within a powder metal core and sensor assembly produced by such a method |
| US5545983A (en) | 1992-03-02 | 1996-08-13 | Seiko Epson Corporation | Displacement sensor with temperature compensation by combining outputs in a predetermined ratio |
| US5286426A (en) | 1992-04-01 | 1994-02-15 | Allegro Microsystems, Inc. | Assembling a lead frame between a pair of molding cavity plates |
| US5304926A (en) | 1992-04-08 | 1994-04-19 | Honeywell Inc. | Geartooth position sensor with two hall effect elements |
| US5250925A (en) | 1992-05-11 | 1993-10-05 | General Motors Corporation | Package for speed sensing device having minimum air gap |
| US5332965A (en) | 1992-06-22 | 1994-07-26 | Durakool Incorporated | Contactless linear angular position sensor having an adjustable flux concentrator for sensitivity adjustment and temperature compensation |
| US5497081A (en) | 1992-06-22 | 1996-03-05 | Durakool Incorporated | Mechanically adjustable linear-output angular position sensor |
| US5757181A (en) | 1992-06-22 | 1998-05-26 | Durakool Incorporated | Electronic circuit for automatically compensating for errors in a sensor with an analog output signal |
| CH683469A5 (de) | 1992-07-03 | 1994-03-15 | Landis & Gyr Business Support | Anordnung mit einem einen Magnetfeldsensor enthaltenden Halbleiterplättchen zwischen einem ersten und einem zweiten Polschuh und Verfahren zur Herstellung einer Vielzahl der Anordnungen. |
| JP2691665B2 (ja) | 1992-07-07 | 1997-12-17 | 日本精機株式会社 | 指針の製造方法 |
| US5691637A (en) | 1992-08-28 | 1997-11-25 | True Position Magnetics, Inc. | Magnetic field position transducer for two or more dimensions |
| US5341097A (en) | 1992-09-29 | 1994-08-23 | Honeywell Inc. | Asymmetrical magnetic position detector |
| US5331478A (en) | 1992-10-07 | 1994-07-19 | Silicon Systems, Inc. | Magnetoresistive head amplifier |
| US5289344A (en) | 1992-10-08 | 1994-02-22 | Allegro Microsystems Inc. | Integrated-circuit lead-frame package with failure-resistant ground-lead and heat-sink means |
| ES2110555T3 (es) | 1992-10-21 | 1998-02-16 | Bosch Gmbh Robert | Dispositivo para la deteccion del movimiento de una parte movil. |
| US5273286A (en) | 1992-11-06 | 1993-12-28 | Sun Donald J C | Multiple concentric section golf ball |
| DE69331895T2 (de) | 1992-12-29 | 2002-12-19 | Eastman Kodak Co | Magnetoresistiver Magnetfeldsensor mit sehr langem Wirkbereich |
| US5469058A (en) | 1992-12-30 | 1995-11-21 | Dunnam; Curt | Feedback enhanced sensor, alternating magnetic field detector |
| JPH06218077A (ja) | 1993-01-26 | 1994-08-09 | Sumitomo Rubber Ind Ltd | スリーピースソリッドゴルフボール |
| JPH06273437A (ja) | 1993-03-22 | 1994-09-30 | Yazaki Corp | 回転検出装置 |
| GB2276727B (en) | 1993-04-01 | 1997-04-09 | Rolls Royce & Ass | Improvements in and relating to magnetometers |
| US5833553A (en) | 1993-04-28 | 1998-11-10 | Lisco, Inc. | Golf ball |
| US5803831A (en) | 1993-06-01 | 1998-09-08 | Lisco Inc. | Golf ball and method of making same |
| US6837805B2 (en) | 1993-04-28 | 2005-01-04 | Callaway Golf Company | Golf ball with multi-layer cover |
| US6213895B1 (en) | 1997-03-28 | 2001-04-10 | Spalding Sports Worldwide, Inc. | Dual cores for golf balls |
| US5424558A (en) | 1993-05-17 | 1995-06-13 | High Yield Technology, Inc. | Apparatus and a method for dynamically tuning a particle sensor in response to varying process conditions |
| US6210293B1 (en) | 1993-06-01 | 2001-04-03 | Spalding Sports Worldwide, Inc. | Multi-layer golf ball |
| US6083119A (en) | 1993-06-01 | 2000-07-04 | Spalding Sports Worldwide, Inc. | Multi-layer golf ball |
| DE4319146C2 (de) | 1993-06-09 | 1999-02-04 | Inst Mikrostrukturtechnologie | Magnetfeldsensor, aufgebaut aus einer Ummagnetisierungsleitung und einem oder mehreren magnetoresistiven Widerständen |
| US5329416A (en) | 1993-07-06 | 1994-07-12 | Alliedsignal Inc. | Active broadband magnetic flux rate feedback sensing arrangement |
| JPH07203645A (ja) | 1993-12-30 | 1995-08-04 | Mabuchi Motor Co Ltd | 小型モータ及びその回転子の製造方法 |
| US5477143A (en) | 1994-01-11 | 1995-12-19 | Honeywell Inc. | Sensor with magnetoresistors disposed on a plane which is parallel to and displaced from the magnetic axis of a permanent magnet |
| US5414355A (en) | 1994-03-03 | 1995-05-09 | Honeywell Inc. | Magnet carrier disposed within an outer housing |
| US5434105A (en) | 1994-03-04 | 1995-07-18 | National Semiconductor Corporation | Process for attaching a lead frame to a heat sink using a glob-top encapsulation |
| US5508611A (en) | 1994-04-25 | 1996-04-16 | General Motors Corporation | Ultrathin magnetoresistive sensor package |
| JPH085399A (ja) * | 1994-06-20 | 1996-01-12 | Sony Magnescale Inc | 磁気センサ |
| US6104231A (en) | 1994-07-19 | 2000-08-15 | Honeywell International Inc. | Temperature compensation circuit for a hall effect element |
| DE9414104U1 (de) | 1994-08-31 | 1994-11-03 | Siemens Ag | Näherungsschalter mit magnetempfindlichem Sensor |
| JPH0897486A (ja) | 1994-09-22 | 1996-04-12 | Hitachi Cable Ltd | ホールセンサ |
| US5581170A (en) | 1994-12-12 | 1996-12-03 | Unitrode Corporation | Battery protector |
| US5500589A (en) | 1995-01-18 | 1996-03-19 | Honeywell Inc. | Method for calibrating a sensor by moving a magnet while monitoring an output signal from a magnetically sensitive component |
| US5488294A (en) | 1995-01-18 | 1996-01-30 | Honeywell Inc. | Magnetic sensor with means for retaining a magnet at a precise calibrated position |
| US7090798B2 (en) | 1997-05-27 | 2006-08-15 | Acushnet Company | Multilayer golf ball with a thin thermoset outer layer |
| US5885172A (en) | 1997-05-27 | 1999-03-23 | Acushnet Company | Multilayer golf ball with a thin thermoset outer layer |
| JPH08201490A (ja) | 1995-01-31 | 1996-08-09 | Mitsumi Electric Co Ltd | センサic |
| ES2160226T3 (es) | 1995-02-02 | 2001-11-01 | Siemens Ag | Dispositivo para medir el numero de revoluciones o para detectar el sentido de giro de un campo magnetico giratorio. |
| DE19510579C2 (de) | 1995-03-23 | 1997-08-21 | Inst Physikalische Hochtech Ev | Drehwinkel- oder Drehzahlgeber |
| US5627315A (en) | 1995-04-18 | 1997-05-06 | Honeywell Inc. | Accelerometer with a cantilever beam formed as part of the housing structure |
| JP3605880B2 (ja) | 1995-05-12 | 2004-12-22 | 株式会社デンソー | 非接触型回転センサ |
| US5581179A (en) | 1995-05-31 | 1996-12-03 | Allegro Microsystems, Inc. | Hall-effect ferrous-article-proximity sensor assembly |
| US6355715B1 (en) | 1995-06-07 | 2002-03-12 | Acushnet Company | Multi-layered golf ball and composition |
| US5781005A (en) | 1995-06-07 | 1998-07-14 | Allegro Microsystems, Inc. | Hall-effect ferromagnetic-article-proximity sensor |
| US5818222A (en) | 1995-06-07 | 1998-10-06 | The Cherry Corporation | Method for adjusting ferrous article proximity detector |
| US6315680B1 (en) | 1995-06-07 | 2001-11-13 | Acushnet Company | Multilayer golf ball |
| US5719496A (en) | 1995-06-07 | 1998-02-17 | Durakool Incorporated | Dual-element proximity sensor for sensing the direction of rotation of a ferrous target wheel |
| US6616549B2 (en) | 1995-06-07 | 2003-09-09 | Acushnet Company | Multi-layer high spin golf ball |
| US5688191A (en) | 1995-06-07 | 1997-11-18 | Acushnet Company | Multilayer golf ball |
| US5810678A (en) | 1995-06-07 | 1998-09-22 | Acushnet Company | Multilayer golf ball |
| US5947842A (en) | 1995-06-07 | 1999-09-07 | Acushnet Company | Multi-layer low-spin golf ball |
| US6793593B2 (en) | 1995-06-15 | 2004-09-21 | Callaway Golf Company | Golf ball with dual cover |
| US6117025A (en) | 1995-06-15 | 2000-09-12 | Spalding Sports Worldwide, Inc. | Golf ball with cover having at least three layers |
| JPH0928830A (ja) | 1995-07-13 | 1997-02-04 | Sumitomo Rubber Ind Ltd | ソリッドゴルフボール |
| US5596272A (en) | 1995-09-21 | 1997-01-21 | Honeywell Inc. | Magnetic sensor with a beveled permanent magnet |
| US5696790A (en) | 1995-10-04 | 1997-12-09 | Tut Systems, Inc. | Method and apparatus for time dependent data transmission |
| US5712562A (en) | 1995-10-13 | 1998-01-27 | Bently Nevada Corporation | Encapsulated transducer with an alignment plug and method of manufacture |
| DE19539458C2 (de) | 1995-10-24 | 2001-03-15 | Bosch Gmbh Robert | Sensor mit Testeingang |
| EP0772046B1 (de) | 1995-10-30 | 2002-04-17 | Sentron Ag | Magnetfeldsensor und Strom- oder Energiesensor |
| DE19540674C2 (de) | 1995-10-31 | 1999-01-28 | Siemens Ag | Adaptionsverfahren zur Korrektur von Toleranzen eines Geberrades |
| US6468168B1 (en) | 1995-10-31 | 2002-10-22 | Spalding Sports Worldwide, Inc. | Golf ball |
| US5733206A (en) | 1995-10-31 | 1998-03-31 | Lisco, Inc. | Golf Ball |
| US5621319A (en) | 1995-12-08 | 1997-04-15 | Allegro Microsystems, Inc. | Chopped hall sensor with synchronously chopped sample-and-hold circuit |
| JPH09166612A (ja) | 1995-12-18 | 1997-06-24 | Nissan Motor Co Ltd | 磁気センサ |
| US5816937A (en) | 1996-01-12 | 1998-10-06 | Bridgestone Sports Co., Ltd. | Golf ball having a multilayer cover |
| US6297627B1 (en) | 1996-01-17 | 2001-10-02 | Allegro Microsystems, Inc. | Detection of passing magnetic articles with a peak-to-peak percentage threshold detector having a forcing circuit and automatic gain control |
| US6525531B2 (en) | 1996-01-17 | 2003-02-25 | Allegro, Microsystems, Inc. | Detection of passing magnetic articles while adapting the detection threshold |
| CA2194934C (en) | 1996-01-25 | 2006-01-10 | Michael J. Sullivan | Golf ball with ionomeric cover and method of making same |
| US6350793B1 (en) | 1996-02-06 | 2002-02-26 | Spalding Sports Worldwide, Inc. | Method of improving scuff and cut resistance of ionomer covered golf ball |
| US5631557A (en) | 1996-02-16 | 1997-05-20 | Honeywell Inc. | Magnetic sensor with encapsulated magnetically sensitive component and magnet |
| JP3393004B2 (ja) | 1996-04-01 | 2003-04-07 | キャスコ株式会社 | ソリッドゴルフボール |
| FR2748105B1 (fr) | 1996-04-25 | 1998-05-29 | Siemens Automotive Sa | Capteur magnetique et procede de realisation d'un tel capteur |
| CH690934A5 (fr) | 1996-04-29 | 2001-02-28 | Suisse Electronique Microtech | Dispositif de détection de position et de mouvement à variation de champ magnétique. |
| JP2816668B2 (ja) | 1996-07-04 | 1998-10-27 | 愛知製鋼株式会社 | 磁気異方性樹脂結合型磁石の製造方法 |
| US6822443B1 (en) | 2000-09-11 | 2004-11-23 | Albany Instruments, Inc. | Sensors and probes for mapping electromagnetic fields |
| JPH1038988A (ja) | 1996-07-30 | 1998-02-13 | Yazaki Corp | 集積化磁気抵抗効果素子回路 |
| DE19634715A1 (de) | 1996-08-28 | 1998-03-05 | Teves Gmbh Alfred | Anordnung zur Erfassung des Drehverhaltens eines Rades |
| US5912347A (en) | 1996-09-30 | 1999-06-15 | Mallinckrodt Inc. | Process for preparing a morphinan derivative |
| US6175233B1 (en) | 1996-10-18 | 2001-01-16 | Cts Corporation | Two axis position sensor using sloped magnets to generate a variable magnetic field and hall effect sensors to detect the variable magnetic field |
| GB2318740B (en) | 1996-11-01 | 1998-10-14 | Kasco Corp | Solid golf ball |
| US5912556A (en) | 1996-11-06 | 1999-06-15 | Honeywell Inc. | Magnetic sensor with a chip attached to a lead assembly within a cavity at the sensor's sensing face |
| US5783293A (en) | 1996-11-07 | 1998-07-21 | Acushnet Company | Golf ball with a multi-layered cover |
| US5729128A (en) | 1996-11-22 | 1998-03-17 | Honeywell Inc. | Magnetic sensor with a magnetically sensitive component that is movable during calibration and rigidly attachable to a formed magnet |
| US5859387A (en) | 1996-11-29 | 1999-01-12 | Allegro Microsystems, Inc. | Semiconductor device leadframe die attach pad having a raised bond pad |
| DE19650935A1 (de) | 1996-12-07 | 1998-06-10 | Teves Gmbh Alfred | Verfahren und Schaltungsanordnung zur Übertragung von Drehzahlinformationen und Zusatzdaten |
| KR0179448B1 (ko) | 1996-12-26 | 1999-02-01 | 황춘근 | 골프공 |
| US5789475A (en) | 1997-02-18 | 1998-08-04 | E. I. Du Pont De Nemours And Company | Adipic acid modified-ionomers having improved properties and processability |
| US5973046A (en) | 1997-02-18 | 1999-10-26 | E. I. Du Pont De Nemours And Company | Modified-ionomers having improved properties and processability |
| JPH10232242A (ja) | 1997-02-19 | 1998-09-02 | Mitsubishi Electric Corp | 検出装置 |
| US5839185A (en) | 1997-02-26 | 1998-11-24 | Sundstrand Corporation | Method of fabricating a magnetic flux concentrating core |
| JP4093381B2 (ja) | 1997-04-01 | 2008-06-04 | 株式会社デンソー | 回転センサの検出信号処理装置 |
| US6100321A (en) | 1997-04-15 | 2000-08-08 | E. I. Du Pont De Nemours And Company | Stearic-modified ionomers for golf balls |
| JPH10318784A (ja) | 1997-05-20 | 1998-12-04 | Matsushita Electric Ind Co Ltd | 回転検出装置 |
| US6635716B2 (en) | 2001-09-13 | 2003-10-21 | Acushnet Company | Golf ball cores comprising a halogenated organosulfur compound |
| US6462536B1 (en) | 1997-06-21 | 2002-10-08 | Micro-Epsilon Messtechnik Gmbh & Co. Kg | Eddy current sensor |
| US6068561A (en) | 1997-07-21 | 2000-05-30 | Taylor Made Golf Company, Inc. | Multi-layer golf ball and method of manufacturing |
| JP4006550B2 (ja) | 1997-08-14 | 2007-11-14 | ブリヂストンスポーツ株式会社 | ソリッドゴルフボール |
| US6198373B1 (en) | 1997-08-19 | 2001-03-06 | Taiyo Yuden Co., Ltd. | Wire wound electronic component |
| US5963028A (en) | 1997-08-19 | 1999-10-05 | Allegro Microsystems, Inc. | Package for a magnetic field sensing device |
| JPH1164363A (ja) | 1997-08-25 | 1999-03-05 | Aisin Seiki Co Ltd | 回転検出器 |
| JP3745509B2 (ja) | 1997-08-27 | 2006-02-15 | 株式会社Neomax | 円筒状樹脂磁石の成形装置 |
| JP3620235B2 (ja) | 1997-09-11 | 2005-02-16 | セイコーエプソン株式会社 | 液晶表示パネル及びその製造方法 |
| ES2262241T3 (es) | 1997-09-15 | 2006-11-16 | Ams International Ag | Sistema de supervision de corriente y procedimiento de fabricacion de este sistema. |
| AU9458398A (en) | 1997-10-08 | 1999-04-27 | Kaneka Corporation | Balloon catheter and method of production thereof |
| US5883567A (en) | 1997-10-10 | 1999-03-16 | Analog Devices, Inc. | Packaged integrated circuit with magnetic flux concentrator |
| US6452381B1 (en) | 1997-11-28 | 2002-09-17 | Denso Corporation | Magnetoresistive type position detecting device |
| US6011770A (en) | 1997-12-10 | 2000-01-04 | Texas Instrumental Incorporated | Method and apparatus for high-order bandpass filter with linearly adjustable bandwidth |
| US6136250A (en) | 1998-01-30 | 2000-10-24 | Comair Rotron, Inc. | Apparatus and method of encapsulating motors |
| JP2002507751A (ja) | 1998-03-20 | 2002-03-12 | コンティネンタル・テーベス・アクチエンゲゼルシヤフト・ウント・コンパニー・オッフェネ・ハンデルスゲゼルシヤフト | 運動検出用センサ装置 |
| US6162135A (en) | 1998-12-24 | 2000-12-19 | Acushnet Company | Low compression, resilient golf balls including an inorganic sulfide catalyst and methods for making the same |
| US6291592B1 (en) | 1998-12-24 | 2001-09-18 | Acushnet Company | Low compression, resilient golf balls including aromatic catalyst and method for making same |
| JPH11304414A (ja) | 1998-04-21 | 1999-11-05 | Mitsubishi Electric Corp | 磁気検出装置 |
| JPH11304415A (ja) | 1998-04-23 | 1999-11-05 | Mitsubishi Electric Corp | 磁気検出装置 |
| US6242905B1 (en) | 1998-04-23 | 2001-06-05 | Siemens Aktiengesellschaft | Method for identifying the direction of rotation of a wheel using hall probes |
| JP2000023423A (ja) | 1998-06-30 | 2000-01-21 | Ykk Corp | ブラシレスモータ用回転角検出器及びそれを用いたブラシレスモータ |
| US6809515B1 (en) | 1998-07-31 | 2004-10-26 | Spinix Corporation | Passive solid-state magnetic field sensors and applications therefor |
| US6100754A (en) | 1998-08-03 | 2000-08-08 | Advanced Micro Devices, Inc. | VT reference voltage for extremely low power supply |
| US6180040B1 (en) | 1998-09-02 | 2001-01-30 | Acushnet Company | Method of forming a golf ball core |
| US6653382B1 (en) | 1999-10-21 | 2003-11-25 | E. I. Du Pont De Nemours And Company | Highly-neutralized ethylene copolymers and their use in golf balls |
| JP2002527597A (ja) | 1998-10-21 | 2002-08-27 | イー・アイ・デュポン・ドウ・ヌムール・アンド・カンパニー | 高弾性の熱可塑性エラストマー組成物 |
| US6815480B2 (en) | 1998-10-21 | 2004-11-09 | E. I. Du Pont De Nemours And Company | Highly-resilient thermoplastic elastomer compositions |
| US6297628B1 (en) | 1998-11-17 | 2001-10-02 | Honeywell Inc | Magnetoresistive bridge array |
| JP3402227B2 (ja) | 1998-11-26 | 2003-05-06 | ブリヂストンスポーツ株式会社 | ゴルフボールカバー材及びゴルフボール |
| JP3378816B2 (ja) | 1998-12-21 | 2003-02-17 | 三洋電機株式会社 | 半導体装置およびその製造方法 |
| JP3656806B2 (ja) | 1999-02-10 | 2005-06-08 | ブリヂストンスポーツ株式会社 | ソリッドゴルフボール |
| JP3656807B2 (ja) | 1999-02-10 | 2005-06-08 | ブリヂストンスポーツ株式会社 | ソリッドゴルフボール |
| US20010009367A1 (en) | 1999-02-26 | 2001-07-26 | Dieter Seitzer | Sensor device to record speed and motion direction of an object, especially rotational speed and direction of a rotating object |
| US6278269B1 (en) | 1999-03-08 | 2001-08-21 | Allegro Microsystems, Inc. | Magnet structure |
| US6565454B2 (en) | 1999-03-12 | 2003-05-20 | Acushnet Company | Variable stress wound golf balls and a method for forming such golf balls |
| EP1037017B1 (en) | 1999-03-15 | 2003-12-17 | Atsutoshi Goto | Inductive position detector |
| US6284840B1 (en) | 1999-04-02 | 2001-09-04 | Acushnet Company | Golf ball core compositions containing high Vicat softening temperature, resilient thermoplastic materials |
| FR2792403B1 (fr) * | 1999-04-14 | 2001-05-25 | Roulements Soc Nouvelle | Capteur de position et/ou de deplacement comportant une pluralite d'elements sensibles alignes |
| US6351506B1 (en) | 1999-04-19 | 2002-02-26 | National Semiconductor Corporation | Switched capacitor filter circuit having reduced offsets and providing offset compensation when used in a closed feedback loop |
| JP2001017572A (ja) | 1999-07-09 | 2001-01-23 | Bridgestone Sports Co Ltd | ソリッドゴルフボール |
| JP2001043475A (ja) | 1999-07-27 | 2001-02-16 | Nsk Ltd | センサの検出信号の伝送方法 |
| DE19937155A1 (de) | 1999-08-06 | 2001-03-15 | Bosch Gmbh Robert | System zur Erzeugung eines Signals zur Überlagerung von Informationen |
| US6291989B1 (en) * | 1999-08-12 | 2001-09-18 | Delphi Technologies, Inc. | Differential magnetic position sensor with adaptive matching for detecting angular position of a toothed target wheel |
| US6436748B1 (en) | 1999-08-31 | 2002-08-20 | Micron Technology, Inc. | Method for fabricating CMOS transistors having matching characteristics and apparatus formed thereby |
| US6339119B1 (en) | 1999-10-22 | 2002-01-15 | Acushnet Company | Scorch retarding golf ball composition |
| JP2001141738A (ja) | 1999-11-18 | 2001-05-25 | Sumitomo Electric Ind Ltd | 回転センサ及びその製造方法 |
| FR2801445A1 (fr) | 1999-11-23 | 2001-05-25 | Koninkl Philips Electronics Nv | Dispositif d'amplification a largeur de bande ajustable |
| JP4964358B2 (ja) | 1999-12-07 | 2012-06-27 | 株式会社デンソー | 回転センサの検出信号処理装置および回転センサの検出信号出力方法 |
| JP2001165702A (ja) | 1999-12-10 | 2001-06-22 | Sumitomo Electric Ind Ltd | 磁気変量検出センサ |
| DE19961504A1 (de) | 1999-12-20 | 2001-06-28 | Bosch Gmbh Robert | Verfahren zur Erkennung von Signalfehlern |
| US6640451B1 (en) | 2000-01-28 | 2003-11-04 | Visteon Global Technologies, Inc. | System and method for sensing the angular position of a rotatable member |
| JP3772251B2 (ja) | 2000-02-10 | 2006-05-10 | ブリヂストンスポーツ株式会社 | マルチピースゴルフボールの製造方法 |
| JP3772252B2 (ja) | 2000-02-10 | 2006-05-10 | ブリヂストンスポーツ株式会社 | マルチピースゴルフボールの製造方法 |
| US6492697B1 (en) | 2000-04-04 | 2002-12-10 | Honeywell International Inc. | Hall-effect element with integrated offset control and method for operating hall-effect element to reduce null offset |
| JP3672016B2 (ja) | 2000-04-24 | 2005-07-13 | ブリヂストンスポーツ株式会社 | マルチピースソリッドゴルフボール |
| US6724191B1 (en) | 2000-05-09 | 2004-04-20 | Admiralty Corporation | Systems and methods useful for detecting presence and/or location of various materials |
| US6501270B1 (en) | 2000-05-15 | 2002-12-31 | Siemens Vdo Automotive Corporation | Hall effect sensor assembly with cavities for integrated capacitors |
| US6917321B1 (en) | 2000-05-21 | 2005-07-12 | Analog Devices, Inc. | Method and apparatus for use in switched capacitor systems |
| JP3554526B2 (ja) | 2000-05-24 | 2004-08-18 | 住友ゴム工業株式会社 | ソリッドゴルフボール |
| JP4793516B2 (ja) | 2000-06-09 | 2011-10-12 | ブリヂストンスポーツ株式会社 | ゴルフボール用樹脂組成物及びゴルフボール |
| US6853178B2 (en) | 2000-06-19 | 2005-02-08 | Texas Instruments Incorporated | Integrated circuit leadframes patterned for measuring the accurate amplitude of changing currents |
| DE10032530C2 (de) | 2000-07-05 | 2002-10-24 | Infineon Technologies Ag | Verstärkerschaltung mit Offsetkompensation |
| JP2002026419A (ja) | 2000-07-07 | 2002-01-25 | Sanken Electric Co Ltd | 磁電変換装置 |
| US7023205B1 (en) | 2000-08-01 | 2006-04-04 | General Dynamics Advanced Information Systems, Inc. | Eddy current sensor capable of sensing through a conductive barrier |
| US6562906B2 (en) | 2000-08-11 | 2003-05-13 | E. I. Du Pont De Nemours And Company | Bi-modal ionomers |
| JP4936299B2 (ja) | 2000-08-21 | 2012-05-23 | メレクシス・テクノロジーズ・ナムローゼフェンノートシャップ | 磁場方向検出センサ |
| US6617846B2 (en) | 2000-08-31 | 2003-09-09 | Texas Instruments Incorporated | Method and system for isolated coupling |
| EP1315605B1 (en) | 2000-09-08 | 2004-03-31 | ASM Technology Singapore Pte Ltd. | Mold and method for encapsulating an electronic device |
| US6746345B2 (en) | 2000-09-11 | 2004-06-08 | Bridgestone Sports Co., Ltd. | Multi-piece solid golf ball |
| US6723008B2 (en) | 2000-09-11 | 2004-04-20 | Bridgestone Sports Co., Ltd. | Multi-piece solid golf ball |
| JP3479275B2 (ja) | 2000-10-05 | 2003-12-15 | 株式会社エヌ・ティ・ティ・データ | 航空経路設定装置及び記録媒体 |
| JP2002149013A (ja) | 2000-11-06 | 2002-05-22 | Minolta Co Ltd | 画像形成装置 |
| JP3767683B2 (ja) | 2000-11-22 | 2006-04-19 | ブリヂストンスポーツ株式会社 | ゴルフボール用材料の製造方法 |
| JP3767678B2 (ja) | 2000-12-13 | 2006-04-19 | ブリヂストンスポーツ株式会社 | ゴルフボール用材料の製造方法 |
| US7190784B2 (en) | 2000-12-29 | 2007-03-13 | Legerity, Inc. | Method and apparatus for adaptive DC level control |
| TW473951B (en) | 2001-01-17 | 2002-01-21 | Siliconware Precision Industries Co Ltd | Non-leaded quad flat image sensor package |
| DE10113871A1 (de) * | 2001-03-21 | 2002-09-26 | Philips Corp Intellectual Pty | Anordnung zur Positions-, Winkel- oder Drehzahlbestimmung |
| US7125345B2 (en) | 2002-10-24 | 2006-10-24 | Acushnet Company | Low deformation golf ball |
| JP3861983B2 (ja) | 2001-04-24 | 2006-12-27 | ブリヂストンスポーツ株式会社 | マルチピースソリッドゴルフボールの製造方法 |
| JP4816847B2 (ja) | 2001-05-23 | 2011-11-16 | ブリヂストンスポーツ株式会社 | マルチピースソリッドゴルフボール |
| EP1260825A1 (de) | 2001-05-25 | 2002-11-27 | Sentron Ag | Magnetfeldsensor |
| GB0126014D0 (en) | 2001-10-30 | 2001-12-19 | Sensopad Technologies Ltd | Modulated field position sensor |
| JP4168604B2 (ja) | 2001-05-31 | 2008-10-22 | 日本ゼオン株式会社 | 現像方法及び画像形成方法 |
| US6756436B2 (en) | 2001-06-26 | 2004-06-29 | Acushnet Company | Golf balls comprising highly-neutralized acid polymers |
| US6498474B1 (en) | 2001-06-27 | 2002-12-24 | Kelsey-Hayes Company | Rotational velocity and direction sensing system |
| US8107901B2 (en) | 2001-08-20 | 2012-01-31 | Motorola Solutions, Inc. | Feedback loop with adjustable bandwidth |
| DE10141371A1 (de) | 2001-08-23 | 2003-03-13 | Philips Corp Intellectual Pty | Magnetoresistive Sensoreinrichtung |
| DE10141877B4 (de) | 2001-08-28 | 2007-02-08 | Infineon Technologies Ag | Halbleiterbauteil und Konvertereinrichtung |
| DE10297359B4 (de) | 2001-09-25 | 2009-11-26 | Daihatsu Motor Co., Ltd., Ikeda | Zerstörungsfreies Prüfverfahren |
| DE10148042B4 (de) | 2001-09-28 | 2006-11-09 | Infineon Technologies Ag | Elektronisches Bauteil mit einem Kunststoffgehäuse und Komponenten eines höhenstrukturierten metallischen Systemträgers und Verfahren zu deren Herstellung |
| US6803757B2 (en) | 2001-10-02 | 2004-10-12 | Bentley Nevada, Llc | Multi-coil eddy current proximity probe system |
| US7129691B2 (en) | 2001-11-01 | 2006-10-31 | Sentron Ag | Current sensor and current sensor manufacturing method |
| JP3877998B2 (ja) | 2001-11-05 | 2007-02-07 | 株式会社山武 | 角度センサの温度情報検出装置および位置検出装置 |
| US20030107366A1 (en) | 2001-12-06 | 2003-06-12 | Busch Nicholas F. | Sensor with off-axis magnet calibration |
| JP2003177171A (ja) | 2001-12-11 | 2003-06-27 | Sumitomo Electric Ind Ltd | 磁気変量センサ及びその製造方法 |
| US6815944B2 (en) | 2002-01-31 | 2004-11-09 | Allegro Microsystems, Inc. | Method and apparatus for providing information from a speed and direction sensor |
| DE10210184A1 (de) | 2002-03-07 | 2003-09-18 | Philips Intellectual Property | Anordnung zum Bestimmen der Position eines Bewegungsgeberelements |
| JP4190780B2 (ja) | 2002-03-18 | 2008-12-03 | 株式会社デンソー | 回転検出装置 |
| KR20040102113A (ko) | 2002-04-18 | 2004-12-03 | 콘티넨탈 테베스 아게 운트 코. 오하게 | 국부적인 변위 및 회전을 검출하는 방법 및 장치 |
| DE10219091A1 (de) | 2002-04-29 | 2003-11-20 | Siemens Ag | Drehbewegungsdetektor |
| US6693419B2 (en) | 2002-05-28 | 2004-02-17 | Allegro Microsystems, Inc. | Proximity detector |
| US7106046B2 (en) | 2002-06-18 | 2006-09-12 | Asahi Kasei Emd Corporation | Current measuring method and current measuring device |
| US6590804B1 (en) | 2002-07-16 | 2003-07-08 | Hewlett-Packard Development Company, L.P. | Adjustable current mode differential amplifier |
| JP4402865B2 (ja) | 2002-07-22 | 2010-01-20 | 旭化成エレクトロニクス株式会社 | 磁電変換素子及びその作製方法 |
| US6798193B2 (en) | 2002-08-14 | 2004-09-28 | Honeywell International Inc. | Calibrated, low-profile magnetic sensor |
| JP3980450B2 (ja) | 2002-08-30 | 2007-09-26 | 株式会社東芝 | 放射線検出器および放射線検出方法 |
| US6702694B1 (en) | 2002-09-05 | 2004-03-09 | Bridgestone Sports Co., Ltd. | Multi-piece solid golf ball |
| US20040046248A1 (en) | 2002-09-05 | 2004-03-11 | Corning Intellisense Corporation | Microsystem packaging and associated methods |
| EP1401166A1 (en) | 2002-09-18 | 2004-03-24 | Nippon Telegraph and Telephone Corporation | Method and Device for transmitting speech and music data using return-to-zero-signals |
| US6781359B2 (en) | 2002-09-20 | 2004-08-24 | Allegro Microsystems, Inc. | Integrated current sensor |
| US6674679B1 (en) | 2002-10-01 | 2004-01-06 | Hewlett-Packard Development Company, L.P. | Adjustable current mode differential amplifier for multiple bias point sensing of MRAM having equi-potential isolation |
| FR2845469B1 (fr) | 2002-10-07 | 2005-03-11 | Moving Magnet Tech | Capteur de position analogique a reluctance variable |
| US6783468B2 (en) | 2002-10-24 | 2004-08-31 | Acushnet Company | Low deformation golf ball |
| JP3720801B2 (ja) | 2002-10-24 | 2005-11-30 | 三菱電機株式会社 | 磁気検出装置 |
| DE10250538B4 (de) | 2002-10-29 | 2008-02-21 | Infineon Technologies Ag | Elektronisches Bauteil als Multichipmodul und Verfahren zu dessen Herstellung |
| JP2004152688A (ja) | 2002-10-31 | 2004-05-27 | Toshiba Plant Systems & Services Corp | ケーブル接続部およびその絶縁方法 |
| JP2004207477A (ja) | 2002-12-25 | 2004-07-22 | Sanken Electric Co Ltd | ホール素子を有する半導体装置 |
| US7259545B2 (en) | 2003-02-11 | 2007-08-21 | Allegro Microsystems, Inc. | Integrated sensor |
| JP4055609B2 (ja) | 2003-03-03 | 2008-03-05 | 株式会社デンソー | 磁気センサ製造方法 |
| US6995957B2 (en) | 2003-03-18 | 2006-02-07 | Hitachi Global Storage Technologies Netherland B.V. | Magnetoresistive sensor having a high resistance soft magnetic layer between sensor stack and shield |
| DE10314602B4 (de) | 2003-03-31 | 2007-03-01 | Infineon Technologies Ag | Integrierter differentieller Magnetfeldsensor |
| JP4292571B2 (ja) | 2003-03-31 | 2009-07-08 | 株式会社デンソー | 磁気センサの調整方法及び磁気センサの調整装置 |
| JP2004356338A (ja) | 2003-05-28 | 2004-12-16 | Res Inst Electric Magnetic Alloys | 薄膜磁気センサ及びその製造方法 |
| JP2004357858A (ja) | 2003-06-03 | 2004-12-24 | Samii Kk | 遊技盤の着脱容易化機構 |
| JP3857255B2 (ja) | 2003-06-12 | 2006-12-13 | ローム株式会社 | 磁気記録再生装置 |
| US20050017709A1 (en) | 2003-07-25 | 2005-01-27 | Honeywell International Inc. | Magnetoresistive turbocharger compressor wheel speed sensor |
| DE10335153B4 (de) | 2003-07-31 | 2006-07-27 | Siemens Ag | Schaltungsanordnung auf einem Substrat, die einen Bestandteil eines Sensors aufweist, und Verfahren zum Herstellen der Schaltungsanordnung auf dem Substrat |
| US7476816B2 (en) | 2003-08-26 | 2009-01-13 | Allegro Microsystems, Inc. | Current sensor |
| US20060219436A1 (en) | 2003-08-26 | 2006-10-05 | Taylor William P | Current sensor |
| US20050122095A1 (en) | 2003-12-05 | 2005-06-09 | Dooley Kevin A. | Rotation sensor and method |
| JP2005171769A (ja) | 2003-12-08 | 2005-06-30 | Kokusan Denki Co Ltd | エンジンの回転情報検出装置 |
| US20050146057A1 (en) | 2003-12-31 | 2005-07-07 | Khor Ah L. | Micro lead frame package having transparent encapsulant |
| JP2005249488A (ja) | 2004-03-02 | 2005-09-15 | Denso Corp | 回転センサの検出信号処理回路及び検出信号処理装置 |
| US7199579B2 (en) | 2004-03-08 | 2007-04-03 | Allegro Microsystems, Inc. | Proximity detector |
| JP4605435B2 (ja) | 2004-03-24 | 2011-01-05 | アイシン精機株式会社 | 回転検出装置 |
| US7193412B2 (en) | 2004-03-24 | 2007-03-20 | Stoneridge Control Devices, Inc. | Target activated sensor |
| US7365530B2 (en) | 2004-04-08 | 2008-04-29 | Allegro Microsystems, Inc. | Method and apparatus for vibration detection |
| US20050225318A1 (en) | 2004-04-08 | 2005-10-13 | Bailey James M | Methods and apparatus for vibration detection |
| JP2008504519A (ja) | 2004-05-18 | 2008-02-14 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | デジタル磁気電流センサおよびロジック |
| JP2005337866A (ja) | 2004-05-26 | 2005-12-08 | Asahi Kasei Corp | 磁性体検出器及び半導体パッケージ |
| DE102004025776B3 (de) | 2004-05-26 | 2005-07-21 | Infineon Technologies Ag | Verfahren zur Detektion von Störungen bei der Ermittlung der Drehgeschwindigkeit eines Rotors und Auswerteschaltung |
| US7961823B2 (en) | 2004-06-02 | 2011-06-14 | Broadcom Corporation | System and method for adjusting multiple control loops using common criteria |
| JP4274051B2 (ja) | 2004-06-03 | 2009-06-03 | 株式会社デンソー | 回転検出装置及び回転検出装置の製造方法 |
| JP4969026B2 (ja) | 2004-06-15 | 2012-07-04 | 三菱電機株式会社 | 磁気検出装置 |
| US7112957B2 (en) | 2004-06-16 | 2006-09-26 | Honeywell International Inc. | GMR sensor with flux concentrators |
| US7184876B2 (en) | 2004-06-18 | 2007-02-27 | Siemens Vdo Automotive | Device and process for determining the position of an engine |
| JP4476717B2 (ja) | 2004-06-30 | 2010-06-09 | オークマ株式会社 | 電磁誘導型位置センサ |
| US20060038559A1 (en) | 2004-08-20 | 2006-02-23 | Honeywell International, Inc. | Magnetically biased eddy current sensor |
| EP1637898A1 (en) | 2004-09-16 | 2006-03-22 | Liaisons Electroniques-Mecaniques Lem S.A. | Continuously calibrated magnetic field sensor |
| US8288046B2 (en) | 2004-09-29 | 2012-10-16 | GM Global Technology Operations LLC | Integrated current sensors for a fuel cell stack |
| US7777607B2 (en) | 2004-10-12 | 2010-08-17 | Allegro Microsystems, Inc. | Resistor having a predetermined temperature coefficient |
| US7253613B2 (en) | 2004-11-02 | 2007-08-07 | Denso Corporation | Rotation detecting device |
| ATE361488T1 (de) | 2004-11-25 | 2007-05-15 | Alcatel Lucent | Verfahren und vorrichtung zur fahrtrichtungserkennung |
| EP1679524A1 (en) | 2005-01-11 | 2006-07-12 | Ecole Polytechnique Federale De Lausanne Epfl - Sti - Imm - Lmis3 | Hall sensor and method of operating a Hall sensor |
| US7476953B2 (en) | 2005-02-04 | 2009-01-13 | Allegro Microsystems, Inc. | Integrated sensor having a magnetic flux concentrator |
| US7701208B2 (en) | 2005-02-08 | 2010-04-20 | Rohm Co., Ltd. | Magnetic sensor circuit and portable terminal provided with such magnetic sensor circuit |
| DE102005047413B8 (de) | 2005-02-23 | 2012-06-06 | Infineon Technologies Ag | Magnetfeldsensorelement und Verfahren zum Durchführen eines On-Wafer-Funktionstests, sowie Verfahren zur Herstellung von Magnetfeldsensorelementen und Verfahren zur Herstellung von Magnetfeldsensorelementen mit On-Wafer-Funktionstest |
| US7253614B2 (en) | 2005-03-21 | 2007-08-07 | Allegro Microsystems, Inc. | Proximity detector having a sequential flow state machine |
| JP2006300779A (ja) | 2005-04-21 | 2006-11-02 | Denso Corp | 回転検出装置 |
| US7325175B2 (en) | 2005-05-04 | 2008-01-29 | Broadcom Corporation | Phase adjust using relative error |
| US7769110B2 (en) | 2005-05-13 | 2010-08-03 | Broadcom Corporation | Threshold adjust system and method |
| US7425824B2 (en) * | 2005-05-20 | 2008-09-16 | Honeywell International Inc. | Magnetoresistive sensor |
| JP4744248B2 (ja) | 2005-05-30 | 2011-08-10 | 財団法人国際超電導産業技術研究センター | Re系酸化物超電導線材の接合方法 |
| US7269992B2 (en) | 2005-06-15 | 2007-09-18 | Honeywell International Inc. | Magnet orientation and calibration for small package turbocharger speed sensor |
| DE102005027767A1 (de) | 2005-06-15 | 2006-12-28 | Infineon Technologies Ag | Integriertes magnetisches Sensorbauteil |
| US7808074B2 (en) | 2005-07-08 | 2010-10-05 | Infineon Technologies Ag | Advanced leadframe having predefined bases for attaching passive components |
| EP1905077B1 (en) | 2005-07-08 | 2012-05-23 | Nxp B.V. | Semiconductor device |
| US7126327B1 (en) | 2005-07-22 | 2006-10-24 | Honeywell International Inc. | Asymmetrical AMR wheatstone bridge layout for position sensor |
| US7361531B2 (en) | 2005-11-01 | 2008-04-22 | Allegro Microsystems, Inc. | Methods and apparatus for Flip-Chip-On-Lead semiconductor package |
| US7323780B2 (en) | 2005-11-10 | 2008-01-29 | International Business Machines Corporation | Electrical interconnection structure formation |
| US20070110199A1 (en) | 2005-11-15 | 2007-05-17 | Afshin Momtaz | Receive equalizer with adaptive loops |
| US7362094B2 (en) | 2006-01-17 | 2008-04-22 | Allegro Microsystems, Inc. | Methods and apparatus for magnetic article detection |
| US7768083B2 (en) | 2006-01-20 | 2010-08-03 | Allegro Microsystems, Inc. | Arrangements for an integrated sensor |
| US7292095B2 (en) | 2006-01-26 | 2007-11-06 | Texas Instruments Incorporated | Notch filter for ripple reduction in chopper stabilized amplifiers |
| JP4754985B2 (ja) | 2006-02-17 | 2011-08-24 | 旭化成エレクトロニクス株式会社 | 磁気センサモジュール |
| JP4607049B2 (ja) | 2006-02-23 | 2011-01-05 | 株式会社デンソー | 回転角検出装置 |
| US8063631B2 (en) | 2006-02-24 | 2011-11-22 | Commissariat A L'energie Atomique Et Aux Energies Alternatives | Method and device for non destructive evaluation of defects in a metallic object |
| US8274276B2 (en) | 2006-03-10 | 2012-09-25 | European Advanced Superconductor Gmbh & Co. Kg | System and method for the non-destructive testing of elongate bodies and their weldbond joints |
| JP4916821B2 (ja) | 2006-03-31 | 2012-04-18 | 株式会社ダイヘン | 電圧検出用プリント基板及びそれを用いた電圧検出器 |
| WO2007138508A1 (en) | 2006-05-30 | 2007-12-06 | Koninklijke Philips Electronics N. V. | Sensor device with adaptive field compensation |
| US20080013298A1 (en) | 2006-07-14 | 2008-01-17 | Nirmal Sharma | Methods and apparatus for passive attachment of components for integrated circuits |
| DE102006037226B4 (de) | 2006-08-09 | 2008-05-29 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Im Messbetrieb kalibrierbarer magnetischer 3D-Punktsensor |
| DE102006045141B9 (de) | 2006-09-25 | 2009-02-19 | Infineon Technologies Ag | Magnetfeld-Sensor-Vorrichtung |
| GB0620307D0 (en) | 2006-10-16 | 2006-11-22 | Ami Semiconductor Belgium Bvba | Auto-calibration of magnetic sensor |
| CA2566933C (en) | 2006-10-17 | 2013-09-24 | Athena Industrial Technologies Inc. | Inspection apparatus and method |
| US7425821B2 (en) | 2006-10-19 | 2008-09-16 | Allegro Microsystems, Inc. | Chopped Hall effect sensor |
| WO2008062778A1 (fr) | 2006-11-21 | 2008-05-29 | Hitachi Metals, Ltd. | Dispositif de détection d'angle de rotation, dispositif de rotation et procédé de détection d'angle de rotation |
| FR2909756B1 (fr) | 2006-12-06 | 2009-02-20 | Bosch Gmbh Robert | Systeme de detection de mouvement pour vehicule automobile. |
| US7729675B2 (en) | 2006-12-08 | 2010-06-01 | Silicon Laboratories Inc. | Reducing noise during a gain change |
| US8128549B2 (en) | 2007-02-20 | 2012-03-06 | Neuronetics, Inc. | Capacitor failure detection |
| US7816772B2 (en) | 2007-03-29 | 2010-10-19 | Allegro Microsystems, Inc. | Methods and apparatus for multi-stage molding of integrated circuit package |
| DE102007018238A1 (de) | 2007-04-18 | 2008-10-23 | Robert Bosch Gmbh | Vorrichtung zur Erfassung der Drehzahl eines rotierbaren Teils |
| EP2000813A1 (en) | 2007-05-29 | 2008-12-10 | Ecole Polytechnique Fédérale de Lausanne | Magnetic field sensor for measuring a direction of a magnetic field in a plane |
| DE102007025000B3 (de) | 2007-05-30 | 2008-12-11 | Infineon Technologies Ag | Magnetfeldsensor |
| US7982454B2 (en) | 2007-06-26 | 2011-07-19 | Allegro Microsystems, Inc. | Calibration circuits and methods for a proximity detector using a first rotation detector for a determined time period and a second rotation detector after the determined time period |
| DE102007029817B9 (de) | 2007-06-28 | 2017-01-12 | Infineon Technologies Ag | Magnetfeldsensor und Verfahren zur Kalibration eines Magnetfeldsensors |
| US7605580B2 (en) | 2007-06-29 | 2009-10-20 | Infineon Technologies Austria Ag | Integrated hybrid current sensor |
| US7800389B2 (en) | 2007-07-13 | 2010-09-21 | Allegro Microsystems, Inc. | Integrated circuit having built-in self-test features |
| US7694200B2 (en) | 2007-07-18 | 2010-04-06 | Allegro Microsystems, Inc. | Integrated circuit having built-in self-test features |
| US7839141B2 (en) | 2007-08-14 | 2010-11-23 | Infineon Technologies Ag | Method of biasing a magneto resistive sensor element |
| JP2009058240A (ja) | 2007-08-30 | 2009-03-19 | Denso Corp | 回転検出装置 |
| DE102007041230B3 (de) | 2007-08-31 | 2009-04-09 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Kalibrierbarer mehrdimensionaler magnetischer Punktsensor sowie entsprechendes Verfahren und Computerprogramm dafür |
| US7973635B2 (en) | 2007-09-28 | 2011-07-05 | Access Business Group International Llc | Printed circuit board coil |
| US20090102467A1 (en) | 2007-10-22 | 2009-04-23 | Johnson Controls Inc. | Method and apparatus for sensing shaft rotation |
| EP2063229B1 (de) | 2007-11-21 | 2012-05-02 | Micronas GmbH | Magnetfeldsensoranordnung |
| US8587297B2 (en) | 2007-12-04 | 2013-11-19 | Infineon Technologies Ag | Integrated circuit including sensor having injection molded magnetic material |
| US8575920B2 (en) | 2007-12-05 | 2013-11-05 | Infineon Technologies Ag | Magneto-resistive magnetic field sensor |
| US9662542B2 (en) * | 2008-01-10 | 2017-05-30 | Acushnet Company | Multi-layer core golf ball |
| US7923996B2 (en) | 2008-02-26 | 2011-04-12 | Allegro Microsystems, Inc. | Magnetic field sensor with automatic sensitivity adjustment |
| US7936144B2 (en) | 2008-03-06 | 2011-05-03 | Allegro Microsystems, Inc. | Self-calibration algorithms in a small motor driver IC with an integrated position sensor |
| US8080993B2 (en) | 2008-03-27 | 2011-12-20 | Infineon Technologies Ag | Sensor module with mold encapsulation for applying a bias magnetic field |
| US8203335B2 (en) | 2008-03-28 | 2012-06-19 | Infineon Technologies Austria Ag | System and method for an inductive proximity switch on a common substrate |
| US7605647B1 (en) | 2008-04-29 | 2009-10-20 | Allegro Microsystems, Inc. | Chopper-stabilized amplifier and magnetic field sensor |
| US8106654B2 (en) | 2008-05-27 | 2012-01-31 | Infineon Technologies Ag | Magnetic sensor integrated circuit device and method |
| US8058870B2 (en) | 2008-05-30 | 2011-11-15 | Infineon Technologies Ag | Methods and systems for magnetic sensing |
| US8610430B2 (en) | 2008-05-30 | 2013-12-17 | Infineon Technologies Ag | Bias field generation for a magneto sensor |
| US7816905B2 (en) | 2008-06-02 | 2010-10-19 | Allegro Microsystems, Inc. | Arrangements for a current sensing circuit and integrated current sensor |
| US8203332B2 (en) | 2008-06-24 | 2012-06-19 | Magic Technologies, Inc. | Gear tooth sensor (GTS) with magnetoresistive bridge |
| US7956604B2 (en) | 2008-07-09 | 2011-06-07 | Infineon Technologies, Ag | Integrated sensor and magnetic field concentrator devices |
| US8063634B2 (en) | 2008-07-31 | 2011-11-22 | Allegro Microsystems, Inc. | Electronic circuit and method for resetting a magnetoresistance element |
| US8624588B2 (en) | 2008-07-31 | 2014-01-07 | Allegro Microsystems, Llc | Apparatus and method for providing an output signal indicative of a speed of rotation and a direction of rotation as a ferromagnetic object |
| US8098062B2 (en) | 2008-08-22 | 2012-01-17 | Honeywell International Inc. | Comparator circuit having latching behavior and digital output sensors therefrom |
| US7764118B2 (en) | 2008-09-11 | 2010-07-27 | Analog Devices, Inc. | Auto-correction feedback loop for offset and ripple suppression in a chopper-stabilized amplifier |
| US8253413B2 (en) | 2008-09-22 | 2012-08-28 | Infineon Technologies Ag | System that obtains a switching point with the encoder in a static position |
| FR2936307B1 (fr) | 2008-09-24 | 2010-09-17 | Moving Magnet Tech Mmt | Capteur de position lineaire ou rotatifa aimant permanent pour la detection d'une cible ferromagnetique |
| US8486755B2 (en) | 2008-12-05 | 2013-07-16 | Allegro Microsystems, Llc | Magnetic field sensors and methods for fabricating the magnetic field sensors |
| US20100188078A1 (en) | 2009-01-28 | 2010-07-29 | Andrea Foletto | Magnetic sensor with concentrator for increased sensing range |
| US8289019B2 (en) | 2009-02-11 | 2012-10-16 | Infineon Technologies Ag | Sensor |
| US8447556B2 (en) | 2009-02-17 | 2013-05-21 | Allegro Microsystems, Inc. | Circuits and methods for generating a self-test of a magnetic field sensor |
| EP2402719A1 (en) | 2009-02-26 | 2012-01-04 | Alps Electric Co., Ltd. | Rotation detection device |
| US8253210B2 (en) | 2009-04-30 | 2012-08-28 | Infineon Technologies Ag | Semiconductor device including a magnetic sensor chip |
| US8362579B2 (en) | 2009-05-20 | 2013-01-29 | Infineon Technologies Ag | Semiconductor device including a magnetic sensor chip |
| US7990209B2 (en) | 2009-06-19 | 2011-08-02 | Allegro Microsystems, Inc. | Switched capacitor notch filter |
| WO2011011479A1 (en) | 2009-07-22 | 2011-01-27 | Allegro Microsystems, Inc. | Circuits and methods for generating a diagnostic mode of operation in a magnetic field sensor |
| US8299783B2 (en) | 2009-08-27 | 2012-10-30 | Allegro Microsystems, Inc. | Circuits and methods for calibration of a motion detector |
| US10107875B2 (en) | 2009-11-30 | 2018-10-23 | Infineon Technologies Ag | GMR sensor within molded magnetic material employing non-magnetic spacer |
| US8450996B2 (en) | 2010-06-03 | 2013-05-28 | Allegro Microsystems, Llc | Motion sensor, method, and computer-readable storage medium providing a motion sensor with a magnetic field sensing element for generating a magnetic field signal and a state processor to identify a plurality of states corresponding to ranges of values of the magnetic field signal having a reduced amount of state chatter |
| US8680848B2 (en) | 2010-06-03 | 2014-03-25 | Allegro Microsystems, Llc | Motion sensor, method, and computer-readable storage medium providing a motion sensor that adjusts gains of two circuit channels to bring the gains close to each other |
| US8664943B2 (en) | 2010-07-07 | 2014-03-04 | Asahi Kasei Microdevices Corporation | Position detecting apparatus |
| US9678175B2 (en) | 2010-07-26 | 2017-06-13 | Radiation Monitoring Devices, Inc. | Eddy current detection |
| US8729892B2 (en) | 2011-04-01 | 2014-05-20 | Allegro Microsystems, Llc | Differential magnetic field sensor structure for orientation independent measurement |
| GB2481482B (en) | 2011-04-27 | 2012-06-20 | Univ Manchester | Improvements in sensors |
| US8680846B2 (en) | 2011-04-27 | 2014-03-25 | Allegro Microsystems, Llc | Circuits and methods for self-calibrating or self-testing a magnetic field sensor |
| DE102011102483A1 (de) | 2011-05-24 | 2012-11-29 | Austriamicrosystems Ag | Verfahren zum Betreiben einer Hallsensoranordnung und Hallsensoranordnung |
| JP5447444B2 (ja) | 2011-07-05 | 2014-03-19 | 株式会社デンソー | 移動体検出装置 |
| US20130015845A1 (en) | 2011-07-11 | 2013-01-17 | Honeywell International Inc. | Absolute angular position sensor using two magnetoresistive sensors |
| DE102011114773B4 (de) | 2011-09-30 | 2017-09-21 | Infineon Technologies Ag | Vorrichtung mit einem Backbias-Magneten und einem Halbleiterchipelement und zugehöriges Herstellungsverfahren |
| US9201123B2 (en) | 2011-11-04 | 2015-12-01 | Infineon Technologies Ag | Magnetic sensor device and a method for fabricating the same |
| US9121880B2 (en) | 2011-11-04 | 2015-09-01 | Infineon Technologies Ag | Magnetic sensor device |
| US9395391B2 (en) | 2013-03-15 | 2016-07-19 | Allegro Microsystems, Llc | Magnetic field sensor and associated method that can store a measured threshold value in a memory device during a time when the magnetic field sensor is powered off |
| US9201122B2 (en) | 2012-02-16 | 2015-12-01 | Allegro Microsystems, Llc | Circuits and methods using adjustable feedback for self-calibrating or self-testing a magnetic field sensor with an adjustable time constant |
| US9153369B2 (en) | 2012-04-23 | 2015-10-06 | Infineon Technologies Ag | Bias field generator including a body having two body parts and holding a packaged magnetic sensor |
| US9817078B2 (en) | 2012-05-10 | 2017-11-14 | Allegro Microsystems Llc | Methods and apparatus for magnetic sensor having integrated coil |
| US9606190B2 (en) | 2012-12-21 | 2017-03-28 | Allegro Microsystems, Llc | Magnetic field sensor arrangements and associated methods |
| US8749005B1 (en) | 2012-12-21 | 2014-06-10 | Allegro Microsystems, Llc | Magnetic field sensor and method of fabricating a magnetic field sensor having a plurality of vertical hall elements arranged in at least a portion of a polygonal shape |
| EP2770303B1 (en) | 2013-02-20 | 2017-04-12 | Nxp B.V. | Magnetic field sensor system with a magnetic wheel rotatable around a wheel axis and with magnetic sensor elements being arranged within a plane perpendicular to the wheel axis |
| JP2015045572A (ja) * | 2013-08-28 | 2015-03-12 | ファナック株式会社 | 磁気を利用して位置を検出する磁気検出器 |
-
2014
- 2014-10-31 US US14/529,606 patent/US9823090B2/en active Active
-
2015
- 2015-10-13 WO PCT/US2015/055230 patent/WO2016108992A2/en active Application Filing
- 2015-10-13 JP JP2017522906A patent/JP6689839B2/ja active Active
- 2015-10-13 KR KR1020177014358A patent/KR102469714B1/ko active IP Right Grant
- 2015-10-13 EP EP15853626.8A patent/EP3209974B1/en active Active
-
2017
- 2017-05-24 US US15/603,712 patent/US9939291B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0504583A1 (de) * | 1991-02-18 | 1992-09-23 | ITT Automotive Europe GmbH | Verfahren und Anordnung zur Erkennung einer Bewegungsrichtung, insbesondere einer Drehrichtung |
| JP2009150732A (ja) * | 2007-12-19 | 2009-07-09 | Asahi Kasei Electronics Co Ltd | 位置検出装置 |
| US20090326860A1 (en) * | 2008-06-26 | 2009-12-31 | Infineon Technologies Ag | Rotation sensing method and system |
Also Published As
| Publication number | Publication date |
|---|---|
| US20160123768A1 (en) | 2016-05-05 |
| JP6689839B2 (ja) | 2020-04-28 |
| EP3209974A2 (en) | 2017-08-30 |
| EP3209974B1 (en) | 2019-11-27 |
| US9823090B2 (en) | 2017-11-21 |
| KR20170074992A (ko) | 2017-06-30 |
| WO2016108992A2 (en) | 2016-07-07 |
| US20170254667A1 (en) | 2017-09-07 |
| US9939291B2 (en) | 2018-04-10 |
| WO2016108992A3 (en) | 2016-09-01 |
| KR102469714B1 (ko) | 2022-11-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6546657B2 (ja) | 強磁性対象物体の動きを検知するための磁場センサ | |
| JP6689839B2 (ja) | 対象物体の動きを検知するための磁場センサ | |
| JP6616414B2 (ja) | 動き検出器を提供する磁場センサ | |
| US10837800B2 (en) | Arrangements for magnetic field sensors that act as movement detectors | |
| US9880026B1 (en) | Magnetic field sensor for detecting motion of an object | |
| EP3213099B1 (en) | Magnetic field sensor and electronic circuit that pass amplifier current through a magnetoresistance element | |
| US9588134B2 (en) | Increased dynamic range sensor | |
| US10260905B2 (en) | Arrangements for magnetic field sensors to cancel offset variations | |
| US20180275214A1 (en) | Magnetic Field Sensor | |
| US11215681B2 (en) | Magnetic field sensor with stray field immunity and large air gap performance | |
| US10782366B2 (en) | Multi-channel sensor output signal protocols | |
| US7019607B2 (en) | Precision non-contact digital switch | |
| US9816838B2 (en) | Magnetoresistive angle sensor with linear sensor elements |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180912 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180912 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191023 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191226 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200401 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200408 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6689839 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |