CN1265896C - 振动波驱动装置 - Google Patents
振动波驱动装置 Download PDFInfo
- Publication number
- CN1265896C CN1265896C CNB021024553A CN02102455A CN1265896C CN 1265896 C CN1265896 C CN 1265896C CN B021024553 A CNB021024553 A CN B021024553A CN 02102455 A CN02102455 A CN 02102455A CN 1265896 C CN1265896 C CN 1265896C
- Authority
- CN
- China
- Prior art keywords
- elastic component
- vibrating elements
- flange
- vibration
- driving device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000006243 chemical reaction Methods 0.000 claims abstract description 15
- 238000006073 displacement reaction Methods 0.000 claims description 10
- 238000005452 bending Methods 0.000 abstract description 6
- 230000014509 gene expression Effects 0.000 description 12
- 230000010355 oscillation Effects 0.000 description 10
- 230000007246 mechanism Effects 0.000 description 8
- 230000008878 coupling Effects 0.000 description 4
- 238000010168 coupling process Methods 0.000 description 4
- 238000005859 coupling reaction Methods 0.000 description 4
- 238000013016 damping Methods 0.000 description 4
- 230000014759 maintenance of location Effects 0.000 description 4
- PNEYBMLMFCGWSK-UHFFFAOYSA-N Alumina Chemical compound [O-2].[O-2].[O-2].[Al+3].[Al+3] PNEYBMLMFCGWSK-UHFFFAOYSA-N 0.000 description 3
- 230000004323 axial length Effects 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- CNQCVBJFEGMYDW-UHFFFAOYSA-N lawrencium atom Chemical compound [Lr] CNQCVBJFEGMYDW-UHFFFAOYSA-N 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 230000013011 mating Effects 0.000 description 3
- 230000009467 reduction Effects 0.000 description 3
- 238000009434 installation Methods 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 238000004904 shortening Methods 0.000 description 2
- 229910001369 Brass Inorganic materials 0.000 description 1
- -1 and for example Inorganic materials 0.000 description 1
- 239000010951 brass Substances 0.000 description 1
- 229910010293 ceramic material Inorganic materials 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 125000004122 cyclic group Chemical group 0.000 description 1
- 230000003292 diminished effect Effects 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 238000012856 packing Methods 0.000 description 1
- 230000000644 propagated effect Effects 0.000 description 1
Images






Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/001—Driving devices, e.g. vibrators
- H02N2/0015—Driving devices, e.g. vibrators using only bending modes
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/106—Langevin motors
Landscapes
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Abstract
一种振动波驱动装置,包括一个电能-机械能转换元件,其被夹紧和固定在数个弹性件之间,其中,一个凸缘形弹性件被放置在电能-机械能转换元件和数个弹性件当中的一个弹性件之间。当一个驱动振动被施加到该电能-机械能转换元件上时,一个振动元件激发弯曲振动,同时那些弯曲振动使得数个超平面弯曲振动在该凸缘弹性件中被激发。由于一个转子与夹在弹性件和电能-机械能转换元件之间的第三弹性件相接触,所以该振动波驱动装置的尺寸能够被减小。此外,由于该振动元件的弯曲振动产生的一种行波和第三弹性件的超平面弯曲振动产生的一种行波都在该振动元件的摩擦表面上产生,所以该振动波驱动装置的输出能够被提高。
Description
发明领域
本发明涉及一种振动波驱动装置,更具体地,涉及一种用在一种条形振动波驱动装置中的振动元件的结构。
现有技术
一种条形振动波驱动装置包括:一个振动元件和一个压电元件,该振动元件由金属或类似材料制成的弹性件构成,作为一个基础结构,该压电元件作为一个电能-机械能转换元件。通过向压电元件施加一种交流电压,该条形振动波驱动装置产生一种驱动振动,例如,一种行波或类似波,其中该交流电压作为一种交流信号,具有不同的相位。
一个接触件通过一个加压机构与弹性件的一个驱动部分压力接触,同时该接触件受到驱动振动的摩擦驱动,从而使得振动元件和接触件彼此相对运动,其中该驱动振动是在弹性件的驱动部分中产生的振动。
此处将一个振动波电机作为一个振动波驱动装置的例子,在该振动波驱动装置中,一个振动元件被用作一个定子,一个接触件被用作一个转子。
振动波电机的振动元件的例子包括:那些具有这样一种结构的振动元件,在该结构中,一个环形压电元件盘被安装到一个环形或盘形弹性件的一个表面上;和那些具有那样一种类型的振动元件,在该类型中,转子的旋转运动通过一个输出轴被输出,或者,在该类型中,转子的旋转运动被直接输出。
这样的一种振动波电机已经被应用到产品中,这些产品被用于驱动一个相机的镜头,等等。现在有环状类型的和条状类型的振动波电机。
图10A是一个条形振动波电机的一个条形振动元件的结构视图,该条形振动波电机用于驱动一个相机的镜头。图10B表示了该条形振动元件的一个轴线部分中的一个振动模态(用z-轴表示轴线方向,用r-轴表示径向方向)。
附图标记101表示一个第一弹性件;附图标记102表示一个第二弹性件;附图标记103表示一个压电元件。附图标记106表示一个轴件,该轴件穿过第一弹性件101、压电元件103和第二弹性件102。轴件106位于一个转子110侧的一端被固定在一个配合件109上,该配合件109将被安装到一个产品上,而轴件106的另一端被固定在一个螺母115上。一个螺纹部分被加工在轴件106的另一端上。随着螺母115的变紧,被放置在一个凸缘部分和螺母115之间的第一弹性件101、压电元件103和第二弹性件102被夹紧和固定在该凸缘部分和该螺母115之间,其中该凸缘部分是被加工用于固定轴件106的。附图标记110表示如上所述的转子,附图标记107表示一个摩擦件,该摩擦件被固定到第一弹性件101上,并将与该转子接触。
当一个驱动信号被施加到压电元件103上时,图10B所表示的弯曲振动(在图10B的主弯曲振动中)就在该条形振动元件中被激发,因此该条形振动元件大体上关于z-轴作摆动运动。相应地,摩擦件107绕z-轴作旋转运动。
看起来似乎这样一种条形振动波驱动装置的振动元件在尺寸上已沿其径向方向被减小,但沿其推进的方向,即其轴线的长度方向,在尺寸上仍留有缩小的余地。
然而,当该振动元件被简单地缩短时,会引起以下问题:谐振频率增加;振动位移被减小,将导致摩擦驱动效率的降低、由于高频引起的驱动电路元件的价格的增加或该元件内部损失的增加。此外,当该振动元件被简单变薄,以降低谐振频率时,一个压电元件的直径和一个摩擦表面也同时被减小,从而降低该压电元件的产生力和摩擦转矩。因此,可以想到,该电机的输出也被变小。
作为一种用于解决上述问题并缩短一个条形振动波驱动装置的轴线长度的技术,在日本专利申请No.2001-145376中公开了这样一种技术,具体如图11所示。
在该文献中的一个振动装置与一个传统产品的相同之处在于,一个压电元件203被夹紧和固定在一个第一弹性件201和一个第二弹性件202之间。然而,该装置与传统产品的不同之处在于,具有一个摩擦表面的第一弹性件201被分成一个内径部分和一个外径部分,这两个部分通过一个薄的连接部分210被彼此连接到一起。
根据这种结构,即使该条形弹性件的轴线被缩短,由于第一弹性件具有足够大的质量,所以也能够得到一个低的谐振频率。
然而,根据这一技术,当连接部分210被变薄,以使谐振频率被降低,从而其刚性被破坏时,产生于压电元件中的位移被该连接部分210的一个软弹簧吸收。因此,难以有效地将驱动力传递到一个转子上。因此,似乎还存在进一步改进的余地。
发明概述
本发明的一个方面是提供一种振动波驱动装置,该振动波驱动装置包括振动元件和转子,该振动元件具有电能-机械能转换元件固定于其上的弹性件,该转子与该振动元件的摩擦表面相接触,并且通过行波来驱动转子,该行波是通过将驱动信号施加到电能-机械能转换元件上而产生于该振动元件的表面上的;其中:所述振动元件包括第一弹性件、第二弹性件和具有所述摩擦表面的作为第三弹性件的所述弹性件;所述第三弹性件和所述电能-机械能转换元件被放置在所述第一弹性件和所述第二弹性件之间;所述转子位于所述第一弹性件的附近;通过叠加第一行波和第二行波来形成所述行波,以便于在所述第三弹性件的摩擦表面产生圆形或椭圆的运动,其中,所述第一行波由弯曲振动所形成,该弯曲振动在与包括作为所述行波的转动中心的轴线的平面平行的方向变位,所述第二行波由产生于所述第三弹性件的超平面弯曲振动所形成。由于一个转子与夹在弹性件和电能-机械能转换元件之间的第三弹性件相接触,所以该振动波驱动装置的尺寸能够被减小。由于该振动元件的弯曲振动产生的一种行波和第三弹性件的超平面弯曲振动产生的一种行波都在该振动元件的摩擦表面上产生,所以该振动波驱动装置的输出能够被提高。
对附图的简要说明
图1是一个振动元件的剖视图,该振动元件表示了本发明的一个第一实施例。
图2A和2B分别是一个振动模态曲线图,这些曲线图被用于解释本发明的。
图3A和3B分别是一个曲线图,这些曲线图表示了一个振动元件的一个振动模态,该振动元件表示了本发明的一个驱动原则。
图4A和4B分别是一个曲线图,这些曲线图表示了一个振动元件的另一个振动模态,该振动元件表示了本发明的一个驱动原则。
图5是一个振动元件的剖视图,该振动元件表示了本发明的一个第二实施例。
图6是一个振动元件的剖视图,该振动元件表示了本发明的一个第三实施例。
图7A和7B分别是一个振动元件的一个透视图和一个剖视图,该振动元件表示了本发明的一个第四实施例。
图8是一个振动元件的剖视图,该振动元件表示了本发明的一个第五实施例。
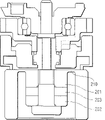
图9是一个振动波驱动装置的结构视图,该振动波驱动装置表示了本发明的一个第六实施例。
图10A是一个传统条形振动波驱动装置的剖视图;图10B是一个曲线图,该曲线图表示了该条形振动波驱动装置的振动元件的振动模态;
图11是一个传统振动波驱动装置的剖视图,该振动波驱动装置具有一个缩短的轴向长度。
对推荐实施例的详细说明
第一实施例
因为被安装在一个软弹簧(连接部分210)的一个端上的质量件作为一个摩擦表面,所以造成日本专利申请No.2001-145376中公开的发明的问题。因此,可以想象通过一个用于降低谐振频率的功能件和一个用于输出驱动力的功能件的彼此分离,就能够解决这一问题。
图1表示了本发明的一个第一实施例。附图标记1表示一个第一弹性件,该弹性件被加工成一个圆柱形状,并由一种振动阻尼损失小的材料,例如黄铜制成。附图标记5表示一个凸缘形(盘形)弹性件,该凸缘形弹性件由陶瓷材料,例如,氧化铝,制成。
在图1中,与转子相接触的摩擦面设置于凸缘形弹性件5的表面上,其与外圆周与压电元件3相接触的表面相对。该摩擦表面形成于凸缘形弹性件5的外圆周区域上。位于摩擦表面区域的凸缘形弹性件5的厚度被加工得略微厚一些,就象该凸缘形弹性件5的中心部分那样,在该中心部分处,该凸缘形弹性件5被第一弹性件1支撑和固定。通过使该中心部分和外圆周的附近区域之间的区域被加工成凹槽,这是为了减小将接受研磨的面积,从而缩短处理的时间。在这种情况下,如从图1中明显看到的那样,凸缘形弹性件5的外圆周的附近区域向外延伸超过第一弹性件1的外圆周部分和压电元件3的外圆周部分,该第一弹性件1和该压电元件3与该凸缘形弹性件5相邻。
附图标记3表示一组压电元件。作为该压电元件组,一种叠式压电元件当中的一个压电元件被放置,该叠式压电元件通过堆叠和加热硬化由数个元件或数个薄片式压电元件构成,其中这数个元件每个在其上和下两侧均具有电极,每个薄片式压电元件也在其上和下两侧均具有电极,通过堆叠和加热硬化这些元件,使之成为一体。
附图标记2表示一个第二弹性件,该第二弹性件由一种具有低振动阻尼损失特性的材料制成,与第一弹性件1的情况相同。
第一弹性件1、第二弹性件2、凸缘形弹性件5和压电元件3通过一个作为一个紧固机构的一个轴件6该被结合起来,以形成一体。轴件6在其一端加工有一个螺纹部分,同时该轴件6被从第一弹性件1的端部插入,从而被穿过压电元件3,然后该螺纹部分被与一个加工在第二弹性件2的轴线中心部分的内螺纹部分拧紧在一起。凸缘形弹性件5和压电元件3被放置在第一弹性件1和第二弹性件2之间,在这种情况下,通过一个在轴件6的中间部分上的被加工用于固定轴件6的凸缘部分和一个加工在轴件6的一个端部上的螺纹部分,上述件都能被夹紧和固定。轴件6的另一个端部分被固定到一个配合件9上,并且该轴件6支撑整个条形振动元件。在本实施例中,该振动元件被这样加工,即除凸缘形弹性件5以外,该振动元件的所有件都具有相同的外径。
当一个驱动信号被从一个未示出的驱动电路施加到压电元件3上时,一个主弯曲振动就在这样构成的该条形振动元件中被激发,此外,一个主圆周超平面弯曲振动在凸缘形弹性件5中被激发,该主圆周超平面弯曲振动不包括任何将成为该振动的波节的圆。
在那个时候,主弯曲振动的波腹的位置就被布置在脱离凸缘形弹性件5的中心表面的一个位置上,其中该主弯曲振动被沿一个径向方向移动,且被上述条形振动元件激发。这里所用的“径向方向”表示一个包含在一个平面内的方向,该平面与穿过第一弹性件1、凸缘形弹性件5、压电元件3和第二弹性件2的各自中心的一条直线正交。
作为在该条形振动元件中生成的弯曲振动,也可以使用一种高阶振动,例如,一个二阶或三阶振动,而不会引起任何问题。然而,在这样的一种情况下,就有必要将凸缘形弹性件5放置在一个脱离这样一种振动的波腹位置的位置上。
接下来,下文的说明将直接针对本发明的驱动原则。
人们已经知道,当一个超平面弯曲振动被在一个盘中激发并被允许传播时,将在该盘的表面产生一种圆运动或椭圆运动。
就此而论,将在日本专利申请No.4-91668中公开的一种装置作为一个具有与本实施例的条形振动元件的形状的相似形状的装置的例子,该装置具有一种图2A中所示的振动模态。然而,在这样一种结构的情况下,即在该结构中,凸缘形弹性件的中心表面8与一个条形振动元件的弯曲振动的波腹的大体中心位置A相一致,如图2A中所示的模态的情况,该凸缘形弹性件通过一个主弯曲振动只沿径向方向做一种平移运动。
反之,当凸缘形弹性件的中心表面8处于一个偏离该条形振动元件的弯曲振动的波腹的中心位置A的位置时,除了沿径向方向的平移运动之外,该凸缘形弹性件还能够绕一个垂直于该条形振动元件轴线的轴线(该轴线正交于图2B中的x-轴和z-轴)激发一种旋转运动,其中该偏离该条形振动元件的弯曲振动的模态在表示本实施例的图2B中进行了表示。因此,当包括一个推进方向上的分力的位移和伴随该位移的惯性力同时作用在凸缘形弹性件的外圆周的附近区域上时,该凸缘形弹性件也能产生一种包括推进方向上的位移分力,即超平面弯曲变形,的振动。此外,由于在该条形振动元件中被激发的弯曲振动绕轴线转动,作用于该凸缘形弹性件上的惯性力以一个用于激发该弯曲振动的力的形式在该凸缘形弹性件的圆周上传播,相应地,该凸缘形弹性件的超平面弯曲振动也传播。
当一个行进的超平面弯曲振动被在一个凸缘形物体上产生时,椭圆运动就在该凸缘形弹性件表面被产生,这是一个众所周知的现象。因此,当通过该条形振动元件的弯曲振动的旋转使该椭圆运动的旋转方向与一个产生于该凸缘形弹性件的圆运动或椭圆运动的旋转方向一致时,一个受到该凸缘形弹性件挤压的转子的转速就被增加,从而该电机的性能被提高。
当该凸缘形弹性件被安装在作用于该凸缘形弹性件的弯曲振动的波腹的中心位置的下面时,转子和该振动元件相接触的位置就被降低,从而整个振动波驱动装置的尺寸能够被减小。
图3A和3B分别表示了一种振动模态,在该振动模态中,该条形振动元件的弯曲振动和该凸缘形弹性件的弯曲振动被彼此相互耦合,其中该凸缘形弹性件的弯曲振动不包括任何将成为该振动的波节的圆。图4A和4B分别表示了一种振动模态,在该振动模态中,该条形振动元件的弯曲振动和该凸缘形弹性件的弯曲振动被彼此相互耦合,其中该凸缘形弹性件的弯曲振动包括将成为该振动的波节的一个圆。
圆周方向上的所有阶次都为1(1波)。
关于由凸缘形弹性件的弯曲行波产生的圆运动或椭圆运动的方向,图3A和3B中点B1和B2处的方向彼此相反,图4A和4B中点B3和B4处的方向彼此相反,此外,点B3和B3′处和点B4和B4′处的方向也彼此相反。点B3和B3′之间的关系和点B4和B4′之间的关系都分别相当于一个节圆的内部和外部之间的关系。
当驱动该条形驱动元件时,振动的形式主要取决于凸缘形弹性件的超平面弯曲固有频率和条形驱动元件的弯曲振动频率之间的关系。因此,就确定了该凸缘形弹性件的形状,从而使得产生一种超平面弯曲振动,该超平面弯曲振动的方向在接触部分与该椭圆运动的旋转方向相一致,该椭圆运动由该条形驱动元件的弯曲振动的旋转运动产生,其中该接触部分与转子相接触。
第二实施例
图5表示了本发明的一个第二实施例。
在本发明的一个振动波驱动装置的振动元件中,一个凸缘形弹性件15被与一个第一弹性件11加工成一整体,一个压电元件13被放置该凸缘形弹性件15和一个第二弹性件12之间,同时该压电元件13以一个未示出的紧固机构被夹紧和固定被第一弹性件11和第二弹性件12之间。例如,一个螺纹件或类似元件可以被用作该紧固机构,该紧固机构被放置在该第一和第二弹性件11和12的内部,并穿过压电元件3。
在本实施例中,该振动元件被这样构成,即该振动元件的上和下端通过一个部分11a和第二弹性件12具有增加的外径,其中该部分11a被加工用于第一弹性件11。这使得该振动元件作为一个整体固有频率被减小,从而使得该振动元件与那些固有频率等于该振动元件的固有频率的振动元件相比具有缩短的轴向长度。
此外,在本实施例中,一个具有耐磨性的件17被安装到凸缘形弹性件15的外圆周的一个表面上的一个摩擦部分上,该摩擦部分受到一个未示出的转子的摩擦,且该摩擦部分是一个凸缘形伸出部分。由于放置了该摩擦件17,就无需再对该凸缘形弹性件进行研磨处理了。
第三实施例
图6表示了本发明的一个第三实施例。
本实施例的一个振动元件包括:一个第一弹性件21、一个第二弹性件22、一个压电元件23和一个凸缘形弹性件25,以及一个未示出的固紧机构,该固紧机构与第一实施例中的固紧机构相同。本实施例与第一实施例的不同之处在于,一个突出部分25a被加工在凸缘形弹性件25的外圆周部分上,一个圆形凹槽25b被加工在相对于突出部分25a的内圆周侧上。
其结果是,该凸缘形弹性件25被这样构成,即在其外圆周端部分具有增加的重量,同时在其内圆周端部分具有降低的刚性。因此,一个超平面位移就在凸缘的外圆周部分中被增加,该凸缘的外圆周部分与一个转子相接触,从而该转子的转速进一步增加。
第四实施例
图7A和7B表示了本发明的一个第四实施例;图7A是一个振动元件的透视图,图7B是该振动元件的剖视图。
同样,在本实施例中,一个凸缘形弹性件35和一个压电元件33被夹紧和固定在一个第一弹性件31和一个第二弹性件32之间。本实施例与上述那些实施例的不同之处在于,若干圆周突出部分35a被加工在该凸缘形弹性件35的外圆周部分上,同时这些圆周突出部分35a被沿圆周方向彼此分开。
因此,当该凸缘形弹性件35经受超平面弯曲变形时,刚性不会增加。所以,能够得到一个相当大的超平面弯曲变形。
此外,由于一个椭圆运动的圆周位移分力被增加,所以有可能增加转子的转速,即电机的输出,其中该椭圆运动由凸缘形弹性件35的超平面弯曲变形的传播产生。
第五实施例
图8表示了根据本发明的一个第五实施例的一个振动元件。通过对第三实施例的振动元件进行进一步改进,就得到该振动元件。
一个用于激发超平面弯曲振动的压电元件43被安装到一个凸缘形弹性件25的底表面上。
当单独的惯性力不足以被用作超平面弯曲振动激发力时,位移通过使用延展力被沿该压电元件的圆周方向增加。作为一种交流信号,一种被用于驱动条形振动元件的信号可以被共用,或者也可以提供另一种交流信号。
第六实施例
图9是一个条形振动波驱动装置的一个结构视图,该条形振动波驱动装置具有第二实施例的振动元件。
如图所示,在本实施例的条形振动元件中,一个第一弹性件51、一个第二弹性件52、一个压电元件53和一个凸缘形弹性件55通过一个作为固紧件的振动元件保持螺栓/支撑销56被固紧在一起。此外,一个将被配合装入一个产品中的配合凸缘59被与一个部分螺纹连接,该部分是销56位于与第二弹性件52相对一侧的位置上的一个部分。一个输出齿轮64被安装到该配合凸缘59上,绕该振动元件的中心轴线旋转。一个转子60被围绕第一弹性件51放置。该转子60被安装有一个接触式弹簧61和一个弹簧箱62,该接触式弹簧61通过压力形式构成,被粘结固定在该转子60的外圆周侧上,该弹簧箱62被配合连接到该转子60的内圆周侧上。该弹簧箱62通过其上和下端部分被调整,并通过其上和下端部分被固定到输出齿轮64上,从而该弹簧箱62不会沿径向方向相对于输出齿轮64移动。一个用于施加压力的弹簧63被放置在该弹簧箱62下端部和输出齿轮64之间。通过该弹簧63的弹簧力,接触式弹簧61被固定在转子60的外圆周部分上的弹簧端与凸缘形弹性件55的上表面压力接触。配合凸缘59也具有一个附加质量的功能,用于防止振动从振动元件保持螺栓/支撑销56向外侧泄露。
在本实施例中,振动元件被固定,而转子作为一个接触件被可动式安装,该转子与该振动元件压力接触。然而,本发明不仅只局限于此。该接触件可被固定,而振动元件被可动式安装,同时,通过在振动元件的凸缘形弹性件中生成的驱动振动,该接触件和该振动元件被相对于彼此摩擦驱动,其中该凸缘形弹性件以一个凸缘形式伸出。
同样,在第二到第六实施例中,虽然在图中未被示出,人们可以理解,凸缘形弹性件的中心表面被布置在一个位置上,该位置不与条形振动元件的弯曲振动的波腹的位置相符。
如上所述,上述实施例采用了一种结构,在该结构中,具有一个摩擦表面的一个凸缘形弹性件被安装在一个条形振动元件上,驱动力从该摩擦表面上获得,同时在该结构中,加工有一个从该凸缘形弹性件伸出的一个弹性件,并且谐振频率通过该弹簧-质量系统被降低。因此,该弹簧可以被做得相当软,从而谐振频率被降低到一个足够低的水平,也就是说,当该弹性件的直径被缩小得相当小时,谐振频率也能被降低到一个足够低的水平。
此外,当该伸出的弹性件部分由金属制成时,即使是当变形集中在该部分上的情况,因为金属材料的阻尼特性比压电元件的阻尼特性好,所以内部损失的增加仍停留在一个最小范围内,从而能够得到一个具有高效率的短振动元件。
此外,由第一行波产生的驱动力能够被加到由第二行波产生的驱动力上,其中第一行波被围绕条形振动元件的轴线产生,第二行波在凸缘形弹性件中被激发。因此,通过只施加一个比被施加给一个电能-机械能转换元件的传统的信号小的信号,就可以得到一个足够大的驱动力。
此外,由于转子能够被围绕伸出的弹性件放置,电机的整体尺寸也能够被减小。
在不背离本发明的思想和本质特征的条件下,能够以其它形式实施本发明。本申请中所公开的实施例从各方面考虑都应是说明性的,而非限定性的。本发明的范围将由所附的权利要求表明,而不是由前面的说明部分表明,并且在权利要求的等同的意义和范围之出现的所有改变都已被包含其中。
Claims (5)
1.一种振动波驱动装置,该振动波驱动装置包括振动元件和转子,该振动元件具有电能-机械能转换元件固定于其上的弹性件,该转子与该振动元件的摩擦表面相接触,并且通过行波来驱动转子,该行波是通过将驱动信号施加到电能-机械能转换元件上而产生于该振动元件的表面上的;其特征在于,
所述振动元件包括第一弹性件、第二弹性件和具有所述摩擦表面的作为第三弹性件的所述弹性件;
所述第三弹性件和所述电能-机械能转换元件被放置在所述第一弹性件和所述第二弹性件之间;
所述转子位于所述第一弹性件的附近;
通过叠加第一行波和第二行波来形成所述行波,以便于在所述第三弹性件的摩擦表面产生圆形或椭圆形的运动,其中,所述第一行波由弯曲振动所形成,该弯曲振动在与包括作为所述行波的转动中心的轴线的平面平行的方向变位,所述第二行波由产生于所述第三弹性件的超平面弯曲振动所形成。
2.如权利要求1所述的振动波驱动装置,其特征在于,所述第一弹性件和所述第三弹性件被加工成整体。
3.如权利要求1所述的振动波驱动装置,其特征在于,所述振动元件的至少一个端部分具有增加的直径。
4.如权利要求1所述的振动波驱动装置,其特征在于,所述第三弹性件在相对于所述摩擦表面的内圆周侧包括厚度较薄的部分,该部分的厚度比所述摩擦表面所在的部分薄。
5.如权利要求1所述的振动波驱动装置,其特征在于,所述振动元件还包括另一个电能-机械能转换元件,该电能-机械能转换元件被固定在所述第三弹性件上。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP013365/2001 | 2001-01-22 | ||
| JP2001013365 | 2001-01-22 | ||
| JP004198/2002 | 2002-01-11 | ||
| JP2002004198A JP3526298B2 (ja) | 2001-01-22 | 2002-01-11 | 振動体および振動波駆動装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1367046A CN1367046A (zh) | 2002-09-04 |
| CN1265896C true CN1265896C (zh) | 2006-07-26 |
Family
ID=26608076
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB021024553A Expired - Fee Related CN1265896C (zh) | 2001-01-22 | 2002-01-22 | 振动波驱动装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US6781283B2 (zh) |
| EP (1) | EP1225682B1 (zh) |
| JP (1) | JP3526298B2 (zh) |
| KR (1) | KR100485882B1 (zh) |
| CN (1) | CN1265896C (zh) |
| DE (1) | DE60222035T2 (zh) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3566711B2 (ja) * | 2002-07-12 | 2004-09-15 | キヤノン株式会社 | 振動波駆動装置 |
| JP4742519B2 (ja) * | 2004-05-14 | 2011-08-10 | コニカミノルタオプト株式会社 | 電気機械変換素子を用いた駆動装置 |
| KR100680307B1 (ko) * | 2005-05-20 | 2007-02-07 | 삼성전기주식회사 | 압전 진동자 및 이를 구비한 초음파 모터 |
| JP4756916B2 (ja) * | 2005-05-31 | 2011-08-24 | キヤノン株式会社 | 振動波モータ |
| KR100704990B1 (ko) * | 2005-08-08 | 2007-04-10 | 삼성전기주식회사 | 고정자 및 이를 이용한 세라믹스 튜브형 초음파 모터 |
| JP2012231595A (ja) * | 2011-04-26 | 2012-11-22 | Canon Inc | 振動装置の駆動回路、塵埃除去装置及び振動型アクチュエータにおける振動装置の駆動回路 |
| JP5932402B2 (ja) * | 2012-03-07 | 2016-06-08 | キヤノン株式会社 | 振動波駆動装置 |
| JP6012226B2 (ja) * | 2012-04-02 | 2016-10-25 | キヤノン株式会社 | 振動波駆動装置及びその駆動回路 |
| JP6184063B2 (ja) | 2012-06-22 | 2017-08-23 | キヤノン株式会社 | 振動波駆動装置および電子機器 |
| JP6053576B2 (ja) * | 2013-03-01 | 2016-12-27 | キヤノン株式会社 | 振動型駆動装置、および撮像装置 |
| CN104113231A (zh) * | 2014-06-24 | 2014-10-22 | 苏州世优佳电子科技有限公司 | 一种微型超声波对焦马达 |
| CN105827146B (zh) * | 2016-04-15 | 2018-01-19 | 南京航空航天大学 | 用于输送及定位的纵弯型行波压电振子及激励方式 |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60170472A (ja) * | 1984-02-10 | 1985-09-03 | Canon Inc | 振動波モ−タ |
| JPS61224882A (ja) * | 1985-03-29 | 1986-10-06 | Canon Inc | 振動波モ−タ |
| JPS61224881A (ja) * | 1985-03-29 | 1986-10-06 | Canon Inc | 振動波モ−タ |
| US4752711A (en) * | 1985-03-29 | 1988-06-21 | Canon Kabushiki Kaisha | Vibration wave motor |
| JPS61224880A (ja) * | 1985-03-29 | 1986-10-06 | Canon Inc | 振動波モ−タ |
| GB2183929B (en) | 1985-08-05 | 1989-11-15 | Canon Kk | Vibration wave motor |
| US4764702A (en) | 1985-12-30 | 1988-08-16 | Taga Electric Co., Ltd. | Ultrasonic motor device |
| US4812697A (en) * | 1986-04-09 | 1989-03-14 | Taga Electric Co., Ltd. | Ultrasonic vibrator and a method of controllingly driving same |
| JPS62262675A (ja) * | 1986-05-09 | 1987-11-14 | Canon Inc | 振動波駆動装置 |
| EP0294102B1 (en) * | 1987-06-04 | 1994-10-12 | Seiko Instruments Inc. | Travelling-wave motor |
| DE69030827T2 (de) * | 1989-02-14 | 1998-01-15 | Canon Kk | Vibrationswellenmotor |
| JP2874765B2 (ja) * | 1989-06-19 | 1999-03-24 | キヤノン株式会社 | 振動型モーター装置 |
| JP2996477B2 (ja) * | 1990-02-05 | 1999-12-27 | キヤノン株式会社 | 振動波駆動装置 |
| JP2998978B2 (ja) * | 1990-08-03 | 2000-01-17 | キヤノン株式会社 | 振動波装置および駆動装置 |
| JP2879955B2 (ja) * | 1990-08-03 | 1999-04-05 | キヤノン株式会社 | 振動波駆動装置 |
| JP2925272B2 (ja) * | 1990-08-31 | 1999-07-28 | キヤノン株式会社 | 振動波モータ |
| JP2803939B2 (ja) * | 1992-01-23 | 1998-09-24 | キヤノン株式会社 | 振動波装置 |
| JP3167394B2 (ja) * | 1992-01-29 | 2001-05-21 | キヤノン株式会社 | 振動波駆動装置および振動波駆動装置を有する装置 |
| JP3107933B2 (ja) * | 1992-12-03 | 2000-11-13 | キヤノン株式会社 | 振動波駆動装置および振動波駆動装置を備えた装置 |
| JP3179601B2 (ja) | 1992-12-17 | 2001-06-25 | キヤノン株式会社 | 振動波モータおよび振動波モータを備えた装置 |
| JP3059031B2 (ja) | 1993-09-22 | 2000-07-04 | キヤノン株式会社 | 振動波駆動装置及び振動波駆動装置を備えた装置 |
| US5949178A (en) | 1995-04-26 | 1999-09-07 | Canon Kabushiki Kaisha | Vibration wave driving apparatus and a vibration member, and manufacturing method of the apparatus and the member |
| JP4136037B2 (ja) * | 1997-10-07 | 2008-08-20 | キヤノン株式会社 | 振動型アクチュエータおよび振動型アクチュエータの組立て方法 |
| JP3616712B2 (ja) * | 1997-11-05 | 2005-02-02 | セイコーインスツル株式会社 | 超音波モータ及び超音波モータ付電子機器 |
| JP2000060152A (ja) * | 1998-08-11 | 2000-02-25 | Mitsuba Corp | 超音波モータ |
| JP2001016875A (ja) * | 1999-06-23 | 2001-01-19 | Canon Inc | 振動波駆動装置 |
| JP2001145376A (ja) | 1999-11-11 | 2001-05-25 | Canon Inc | 振動波駆動装置 |
-
2002
- 2002-01-11 JP JP2002004198A patent/JP3526298B2/ja not_active Expired - Fee Related
- 2002-01-17 US US10/047,108 patent/US6781283B2/en not_active Expired - Lifetime
- 2002-01-21 EP EP02001427A patent/EP1225682B1/en not_active Expired - Lifetime
- 2002-01-21 DE DE60222035T patent/DE60222035T2/de not_active Expired - Lifetime
- 2002-01-22 KR KR10-2002-0003486A patent/KR100485882B1/ko active IP Right Grant
- 2002-01-22 CN CNB021024553A patent/CN1265896C/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| KR100485882B1 (ko) | 2005-04-29 |
| JP2002291263A (ja) | 2002-10-04 |
| US20020096971A1 (en) | 2002-07-25 |
| EP1225682A3 (en) | 2005-07-27 |
| US6781283B2 (en) | 2004-08-24 |
| CN1367046A (zh) | 2002-09-04 |
| KR20020062591A (ko) | 2002-07-26 |
| DE60222035D1 (de) | 2007-10-11 |
| EP1225682B1 (en) | 2007-08-29 |
| JP3526298B2 (ja) | 2004-05-10 |
| DE60222035T2 (de) | 2008-06-05 |
| EP1225682A2 (en) | 2002-07-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1265896C (zh) | 振动波驱动装置 | |
| CN1879232A (zh) | 超声导螺杆电动机 | |
| CN1268442C (zh) | 振动件以及具有该振动件的振动波驱动装置 | |
| CN1186825C (zh) | 振动元件和振动波驱动装置 | |
| CN1835374A (zh) | 环形定子多自由度超声电机 | |
| JP2803939B2 (ja) | 振動波装置 | |
| CN1663057A (zh) | 近共振机电电动机 | |
| CN1153339C (zh) | 振动驱动马达 | |
| JP3059031B2 (ja) | 振動波駆動装置及び振動波駆動装置を備えた装置 | |
| CN1667934A (zh) | 开槽金属方柱压电片复合超声微电机 | |
| CN1268053C (zh) | 振动波驱动装置 | |
| US8169723B2 (en) | Vibration actuator, lens barrel and camera | |
| CN1258864C (zh) | 带导电轴的压电柱的超声微电机 | |
| CN200959578Y (zh) | 驻波旋转压电马达 | |
| CN1157916A (zh) | 振动发生器 | |
| CN2847685Y (zh) | 开槽金属方柱压电片复合超声微电机 | |
| JPH0514512B2 (zh) | ||
| CN1176519C (zh) | 双向旋转纵弯驻波超声马达 | |
| Ishii et al. | An ultrasonic motor using transmission line and spiral structure driven by a Langevin transducer | |
| JP3566696B2 (ja) | 振動波駆動装置 | |
| JPH0744856B2 (ja) | 超音波モータ | |
| Ishii et al. | An ultrasonic motor using transmission line and horn with oblique slits driven by a Langevin transducer | |
| JPS60148385A (ja) | 捻り・屈曲モ−ドのリング状超音波振動子 | |
| JP2001016875A (ja) | 振動波駆動装置 | |
| CN1633023A (zh) | 一种弯曲振动模态的旋转型柱状超声微电机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20060726 Termination date: 20200122 |