CN1268053C - 振动波驱动装置 - Google Patents
振动波驱动装置 Download PDFInfo
- Publication number
- CN1268053C CN1268053C CN02153876.XA CN02153876A CN1268053C CN 1268053 C CN1268053 C CN 1268053C CN 02153876 A CN02153876 A CN 02153876A CN 1268053 C CN1268053 C CN 1268053C
- Authority
- CN
- China
- Prior art keywords
- vibration
- oscillator
- frequency band
- elastomer
- driving device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 229920001971 elastomer Polymers 0.000 title claims description 29
- 239000000806 elastomer Substances 0.000 title claims description 29
- 230000008093 supporting effect Effects 0.000 title claims description 10
- 238000000034 method Methods 0.000 title description 8
- 238000006243 chemical reaction Methods 0.000 claims abstract description 25
- 230000004044 response Effects 0.000 claims description 31
- 230000000694 effects Effects 0.000 claims description 4
- 230000002153 concerted effect Effects 0.000 claims description 2
- 230000010355 oscillation Effects 0.000 description 14
- 238000006073 displacement reaction Methods 0.000 description 6
- 239000002783 friction material Substances 0.000 description 5
- PNEYBMLMFCGWSK-UHFFFAOYSA-N Alumina Chemical compound [O-2].[O-2].[O-2].[Al+3].[Al+3] PNEYBMLMFCGWSK-UHFFFAOYSA-N 0.000 description 3
- 238000005452 bending Methods 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 238000010438 heat treatment Methods 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 241000237970 Conus <genus> Species 0.000 description 2
- 230000002159 abnormal effect Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000001788 irregular Effects 0.000 description 2
- 230000007774 longterm Effects 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 239000007769 metal material Substances 0.000 description 2
- 229920001343 polytetrafluoroethylene Polymers 0.000 description 2
- 239000004810 polytetrafluoroethylene Substances 0.000 description 2
- 239000000843 powder Substances 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 230000000630 rising effect Effects 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 239000007767 bonding agent Substances 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 239000000805 composite resin Substances 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 230000008020 evaporation Effects 0.000 description 1
- 238000001704 evaporation Methods 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000012856 packing Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- -1 polytetrafluoroethylene Polymers 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
Images




Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/16—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors using travelling waves, i.e. Rayleigh surface waves
- H02N2/163—Motors with ring stator
Landscapes
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
- Apparatuses For Generation Of Mechanical Vibrations (AREA)
Abstract
本发明涉及配备有把电-机械能转换元件固定到弹性体上的振子、对设在所述振子上的滑动部加压并与接触的接触子,通过将规定的驱动频带的交变信号供应给所述电-机械能转换元件使所述弹性体上发生规定的固有振动模式、驱动所述接触子的振动波驱动装置。所述装置的特征为,使弹性体上发生固有振动模式,检测出与所述固有振动模式不同的振动模式的固有频率,如果被检测出来的所述其它振动模式的固有频率包含在所述驱动频带内的话,使所述支承构件的刚性发生变化。
Description
技术领域
本发明涉及配备有由固定有电-机械能转换元件的弹性体构成的振子以及与振子表面接触的接触体、利用电-机械能转换元件在振子表面上产生振动、使接触体相对于移动子移动的振动波驱动装置。
背景技术
振动波马达(超声波马达)等的振动波驱动装置,具有通过将交流电压等交变信号供应给压电元件等电-机械能转换元件、在固定有电-机械能转换元件的金属等的弹性体上产生振动的振子,并具有压向振子并与之接触的移动子(接触体),利用形成于振子上的振动,使移动子相对于振子移动。将振子固定且以把接触体作为移动子的振动波马达,是一种以低速度提取出大驱动力的致动器,其特长是速度的不均匀性很小。
特别是,在弹性体上产生作为行波的振动,驱动与该弹性体接触的移动子的振动波马达,可以更顺滑地驱动。
图15表示现有的振动波马达的结构,该振动波马达由以下部分构成:用小螺钉等固定到壳体7上的圆环状的金属等制成的弹性体1,中间经由摩擦材料3与弹性体1摩擦接触的移动子4,对移动子4进行加压使之与弹性体1接触、将移动子4的旋转输出的加压弹簧5及旋转轴6。旋转轴6借助滚珠轴承8可自由旋转地支承在壳体7上。弹性体1由位于最外周的圆环状的振动部1A,位于振动部1A的内周侧的支承圆板部1B以及位于比支承圆板部1B更靠近内周侧的凸缘部1C成一整体地构成,通过金属材料的切削加工或粉末烧结等成形制作。利用粘接剂等将压电元件接合在该弹性体1的一个面上形成振动子。
图16表示现有技术的振动波马达振子的透视图。在圆环状的振动部1A的一个平面上沿轴向方向形成多个放射状的槽4,在由所述多个槽形成的梳形齿状突起1E的上表面上,作为摩擦材料3粘接以PTFE(聚四氟乙烯)为主体的复合树脂材料。该摩擦材料,也可以根据用途采用进行过表面处理的金属材料和氧化铝陶瓷。
如图17所示,在弹性体1的另一个不形成多个槽的面上,作为电-机械能转换元件粘接圆环状的压电元件2,在压电元件2上利用蒸镀或印刷法形成图17所示的图形电极2-1。
图形电极2-1与在振子的圆环部激发的振动模式式的阶数相对应,以阶数的四倍数等分割,在各个电极上,依次外加时间位相每次差90°的大约为正弦波形状的交流电压。当以激发振动模式式的固有频率附近的频率外加交流电压时,由于因压电元件2的伸缩加在弹性体上的弯曲力矩,弹性体发生共振,分别相对于每次相差90°的交流电压发生振动,将这些振动合成形成行波。这样,由于在圆环状的振动部上均匀地配置压电元件制成的起振部,所以使振动的振幅均匀,可以长期保持高精度的驱动。
此外,特开平2-214472号公报公开了降低所谓“振鸣”的异常噪音的技术。作为因在接触部产生的起振力引起的自激振动,在产生不同于用作驱动模式式的其它的振动模式的情况下,在该模式的波长的1/2的整数倍的位置处的动态刚性不均匀,使同一个模式的多个振动的固有频率不同,很难产生行波。在接触部,由于作用有因移动子与振子的接触产生的起振力,所以,有时会产生这种振鸣,但通过这种方法可以使之不易产生振鸣。图18的槽4-1比其它的槽4深,在整个圆周上,在16个部位处配置这种槽4-1。从而,在16个部位处具有波节,在8阶模式的二个固有频率之间产生差值,很难产生作为行波的自激振动。
但是,在现有技术的结构中,即使使振动均匀化,或者降低其它模式的自激振动,有时也很难长期保持其性能不变。
图19表示现有技术的弹性体的驱动模式(平面外弯曲模式的9阶)附近的另外的固有模式(扭转模式的5阶和6阶,平面内弯曲模式的2阶及3阶)及固有频率。如图20所示的弹性体的变形图所示,该振子20用圆环部沿轴向弯曲变形的平面外9阶模式进行驱动。在本例中,相对于用作驱动的平面外9阶模式的频率在下方的频带及上方的频带存在着比其阶数低的平面外8阶模式以及比其阶数高的平面外10阶模式。
此外,除平面外模式之外,如图21所示,存在着以圆环部的截面的中心附近为轴、圆环部交互地扭转的扭转模式,进而,还存在着在垂直于圆环的对称轴的平面内进行弯曲振动的平面内振动模式。
由于位相相等的9个部位处的起振点均匀地配置在圆周上,9阶模式以外的起振力相互抵消,所以不会产生图17所示的压电元件的电极图形产生的起振力,因此,激起驱动频率附近的其它模式的起振力为零。
图22的曲线A,是表示在使移动子不与振子接触的状态时,振动位移的频率相对于外加在压电元件上的驱动电压频率的响应曲线。因为没有其它模式的起振力,所以不出现其它模式的响应。
图22的曲线B是表示在弹性体的摩擦部处以在等间隔的9个点上起振时的频率响应曲线。这时,和曲线A的情况一样响应曲线只出现9阶模式。
另一方面,由于加到振子上的起振力是从压电元件来的起振力和从加压接触的移动子来的起振力两个力的合力,所以,在驱动移动子的状态下,应当受到从压电元件来的9阶起振和在移动子的9个区域的均匀的起振力,即使在驱动状态,其它的模式也不会被强制激振。
但是,当在摩擦材料上有凹凸的情况下,则显示出不同的响应曲线。在摩擦材料仅在一点上突出时,与移动子的接触压力集在突出的一个点上,其它接触部的压力降低。当驱动振动所突出的一个点的行波通过时,振子在该突出的点上受到以驱动频率进行的起振。
图22的曲线C表示在振子的摩擦部一点上起振时的频率响应曲线。与9点均匀起振的情况不同,可以看出,这时出现其它模式的响应。
图23A和23B是表示作为另外的响应曲线的平面外弯曲模式、扭转模式的响应。图23A表示低振幅(低转数)时的情况,图23B是大振幅(高转数)时的情况。平面外弯曲9阶模式的响应曲线,由于通过增大振幅而产生的接触状态的变化,所以共振频率随振幅的增加缓慢下降,呈现出非线性的性质。
这里,为了激起平面外弯曲9阶模式的振动作为驱动模式,进行在图中所示驱动频带区域中的起振。这时,接近驱动模式的扭转5阶模式在用于驱动的频带区域中的响应增大。因此,在摩擦部有凹凸的驱动状态下,利用驱动频率下的强制激振产生扭转5阶模式,有和作为驱动模式的平面外的9阶振动重叠的危险。
本发明人实际上测定了摩擦部具有凹凸的状态的振子的振幅分布,结果发现了如图24所示的振幅分布。该振幅分布为通过在9阶模式上以相同的频率重叠扭转5阶模式,在14个部位有振幅极大值。
在这种情况下,由于响应驱动频率产生不需要的其它模式,使不需要的振动也作为驱动频率的振动产生,所以不会发生像振鸣这样的异常噪音。
但是,合成振动的振幅不均匀,促进摩擦的部分的磨损,使其成为不均匀磨损的原因。在14个部位的不均匀磨损进行过程中,其与驱动9阶模式的振子的空隙加宽,更容易产生5阶模式。从而进一步促进不均匀磨损,不能保持稳定的接触,输出特性恶化。
此外,摩擦部的凹凸是由于制造时的缺损以及在驱动状态下的磨损的粉末临时堆积以及填充材料的脱落造成的,以这些凹凸为起因,所受到的从移动子来的起振力变成以驱动频率对其它模式进行起振的起振力。
发明内容
根据本申请的发明的特征在于提供一种相对于在通常的使用状态下产生的摩擦部的凹凸,使可以强制激振的驱动模式以外的其它模式离开驱动频带,通过减少响应振幅排除由于和其它模式的重叠造成的振动不均匀,可以长期维持其输出性能的振动波驱动装置。
本发明的一个方案,提供一种振动波驱动装置,其具有振子和接触体,所述振子上配备有电能-机械能转换元件和固定该电能-机械能转换元件的弹性体,所述接触体被加压与该振子接触,通过将规定的驱动频带的交变信号供应给该电能-机械能转换元件,在该振子上产生弯曲振动和扭转振动,并通过在该振子上的弯曲振动所产生的驱动振动,使所述接触体进行移动,其中,所述弹性体具有圆环状的振动部、把所述弹性体安装到其它构件上用的固定部、以及连接该振动部和该固定部的支承部,该支承部的厚度比该振动部的厚度和该固定部的厚度都小,该支承部形成为这样的形状:当在所述电能-机械能转换元件上施加处于所述驱动频带内的交变电压时,所述扭转振动的频率达不到固有振动频率的程度。
本发明的另一个方案,提供一种振动波驱动装置的设定固定在振子的弹性体上、支承该弹性体的构件的形状的方法,所述驱动装置具有配备电-机械能转换元件和弹性体的振子以及与振子接触的移动子,并通过向电-机械能转换元件提供规定的驱动频带的交变信号在振子上产生驱动用振动,所述支承构件的形状的设定方法为,在使振子上产生驱动用的振动时,如果在驱动频带区域内含有与驱动用的振动不同的另外的振动固有频率的话,使支承弹性体的构件的刚性发生变化。
本发明的其它特点和优点将在参照附图所进行的下面的描述中变得更加清楚,其中,在所有的附图中,对相同或类似的部分赋予类似的标号。
附图说明
图1是第一种实施形式的振子的剖面图。
图2是表示第一种实施形式的振子的固有频率的图。
图3是表示第一种实施形式的驱动频带的图。
图4是第二种实施形式的振子的剖面图。
图5是表示扭转模式的振动形状的剖面图。
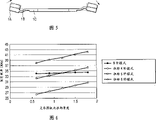
图6是表示第二种实施形式的振子的固有频率的图。
图7是第三种实施形式的振子的剖面图。
图8是第四种实施形式的振子的剖面图。
图9是第四种实施形式的另外一种形式的振子的剖面图。
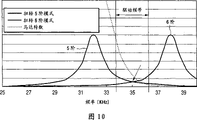
图10是表示第五种实施形式的驱动频带的图。
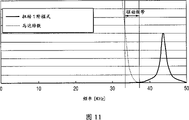
图11是表示第六种实施形式的驱动频带的图。
图12是表示第七种实施形式的振动波马达的剖面图。
图13是第八种实施形式的振子的透视图。
图14是第八种实施形式的振子的剖面图。
图15是现有技术的振动波马达的剖面图。
图16是现有技术的振子的透视图。
图17是现有技术的振子的透视图
图18是现有技术中降低不需要的振动的机构图。
图19是现有技术中的振子的固有频率表。
图20是驱动模式的变形图。
图21是扭转模式的变形图。
图22是振子的频率响应曲线图。
图23A和23B是表示振子的频率响应曲线和驱动频带的图。
图24是扭转模式重叠时的振幅分布图。
具体实施方式
图1表示本发明的第一种实施形式的振子。
在构成振子的圆环状的弹性体1的圆环状的振动部1A上,在周向形成沿放射方向延伸的多个槽2,在该槽2之间形成多个放大位移用的梳齿3。在圆环状振动部1A的内径部上成一整体地形成支承圆环状振动部1A用的支承圆板部1B,进而,在其内径部上成一整体地形成固定振子用的凸缘部1C。支承圆板部1B兼作调整振子的频率的频率调节部。
图2表示,在弹性体1上没有支承圆板部1B的情况下,以及在使支承圆板部1B的厚度变化的每一种结构中所检测出来的驱动模式的固有频率以及扭转模式的固有频率。
如图2所示,只有圆环状振动部1A时(在没有支承圆板部1B及凸缘部1C的状态下)的平面外弯曲9阶模式的固有频率位于扭转4阶模式和扭转5阶模式的中央。
这里,为支承该振动部1A,设置支承圆板部1B及凸缘部1C,用小螺钉紧固凸缘部1C。支承圆板部1B的厚度需要十分薄,以便不妨碍振动部1A的振动。但是,相反地,如支持圆板部1B的厚度过分薄时,则防止振子发热的作用将得不到有效的发挥。该防止振子发热作用的发挥是依赖于将因振动在圆环部产生的热量以及在滑动部(接触部)的摩擦热传导到振子的外部而实现的。
图2表示增加支承圆板部1B的厚度时各固有振动数的变化。
即使增加支承圆板部1B的厚度,作为驱动模式的平面外弯曲9阶模式的固有频率没有太大的变化,与此相对,扭转模式随着支承圆板部1B的厚度的增加固有频率上升。当使支承圆板部1B的厚度变化时,扭转模式的固有频率比平面外弯曲模式的固有频率变化大。
在图2中用实线竖长形椭圆包围起来的区域1内,作为驱动模式的平面外9阶模式的固有频率与扭转5阶模式的固有频率几乎重合。在具有相当于该区域1的厚度的支承圆板部1B的振动波马达中,在激振驱动模式的情况下,由于在振子与移动子的滑动部起振,所以,存在强制地起振扭转5阶模式的危险。
因此,在本实施例中,通过使支承圆板部1B的厚度相当于用图2中的虚线的椭圆包围的区域2、区域3的厚度,使驱动模式的固有频率充分离开扭转模式的固有频率。
图3表示驱动频率-速度曲线和在滑动部起振的扭转模式的频率响应。图中箭头所示的区域是该马达的驱动频带。通过适当地选择支承圆板部的薄板部的尺寸,将驱动频带设定在不同阶数的扭转模式的中间,其结果是,如图3所示,可以在不包含扭转模式的固有频率的频带进行驱动。
即,通过调整振子的支承圆板部1B的动态刚性,使得比起驱动模式的固有频率来,除驱动模式之外的模式的固有频率有很大的变化,以便振子的驱动频带与驱动模式以外的模式的固有频率不重叠。
图4是表示本发明的第二种实施形式的振子的剖面图。
在本实施形式中,为了调整振子的频率,在支承圆板部1B的内径部附近,设置厚度薄的部分。
在驱动时,由于本身的内应变产生的热量、由于在滑动部的摩擦产生的热量、以及压电元件的发热,振动部1A的温度升高。为了确保滑动部的稳定的摩擦力,防止与压电元件的接合部老化,有必要将振动部1A的温度的上升控制在规定的范围内,为此,经过支承圆板部1B进行传热是很有效的。
支承圆板部1B的传热性能,由从振动部1A指向凸缘部1C的径向的垂直截面的面积及温度梯度决定。因此,当为了避开其它模式进行配置时,如将支承圆板部1B部的厚度减薄,则会损害其传热性能,存在因振动部1A的温度上升造成性能恶化及破损的危险。
因此,在本实施形式中,设置只有支承圆板部1B的局部厚度减薄的频率调整部9。
图5是表示扭转振动时的弹性体的形状的剖面图。在图5中,由于作为支承圆板部1B的凸缘1C侧的内周侧为固定端,所以在振动时,振幅小应变大。由于外周的振动部1A旋转位移,在支承圆板部1B上存在着具有最大振幅的位置,这里的振幅和应变都大。
另一方面,在通过降低扭转模式的固有频率使扭转模式的固有频率脱离驱动频带的情况下,通过降低应变大的部分的刚性,可以有效地降低振子的刚性。
但是,在将外形的一部分切除以降低刚性的情况下,该区域的质量也同时降低。如切除振动振幅大的部分的质量,则具有可以大大降低该振动模式的等效质量,使固有频率上升的效果,这与通过降低刚性造成的固有频率的降低相抵消。因此,去掉扭转模式的振动振幅小、应变大的区域、设置缩小相对于扭转振动的动态刚性的频率调整部,对于降低扭转模式的固有频率是有效的。
图6表示在支承圆板部的一部分上设置刚性低的部位时的驱动模式的固有频率与扭转模式的固有频率的关系。和图2所示的使支承圆板部的整个厚度变化的情况同样,可获得降低固有频率的效果。为了使来自圆环状的振动部的热传递到固定部,当厚度薄的部分的宽度尽可能窄时,热量梯度变大,可以传递更多的热量。因此,在本实施例中,扭转模式的振幅小应变大,通过将支承圆板部1B的最内周附近的厚度减薄,在不降低散热效果的情况下使扭转模式的固有频率降低。
图7表示第三种实施形式的振子的剖面图。
本实施形式,在支承圆板部1B的最内周附近设置随着靠近固定部厚度变大的圆锥部9。
在本实施形式的振子中,在支承圆板部1B的内周侧与其它部分的厚度相同的情况下,靠近驱动频带的上方存在着扭转模式固有频率。在这种情况下,由于提高扭转模式的固有频率是有效的,所以,使扭转模式的振幅小应变大的支承圆板部1B的内周侧的厚度大于径向方向外方侧部分的厚度,通过提高相对于扭转模式的动态刚性,将该圆锥部9作为频率调整部。
进而,在本实施形式中,通过制成从应变最大的部分向振幅增大的外周侧厚度减薄的圆锥状,可以以更小的区域的变更就可以调整频率,因此可以减少对驱动模式的影响。这里,作为圆锥形,也可以制成多级的阶梯状。
图8是表示第四种实施形式的振动波马达的剖面图。
本实施形式的弹性体是不具有支承圆板部、固定部的圆环状的弹性体,用于利用中央部的空间的中空结构的情况。
本实施形式的振子在轴向方由弹性体下部的弹性材料片10支承向上。该片采用粘滞阻力低的材料,例如,利用毛毡等。
在现有技术中,采用与振子的内径、外径基本上相同直径的环状片,但在这里为了避开圆环部的扭转振动的固有频率,采用内径侧和外径侧分离的片状结构。
在采用和现有技术一样的与振子的内径、外径基本上相同直径的环状片的情况下,构成该片的内径与外径的中间的部分,在平面外弯曲振动的情况下,在垂直于滑动面的方向上发生位移。但是,在扭转振动时,该构成所述中间的部分构成扭转的轴,所以,在垂直于滑动面的方向上不发生位移。从而,该部分在垂直于滑动面的方向上的刚性对平面外振动有影响,而对扭转振动没有影响。与此对应,片的内径侧与外径侧部分的刚性,对平面外振动以及扭转振动都有影响。
因此,通过将片的形状分割为二分隔成内外,可以在基本上不改变对平面外振动的刚性的情况下,提高对扭转振动的刚性。即,该毛毡起着作为频率调整部的作用。
反之,在降低扭转振动的固有频率的情况下,如图9所示,如果把毛毡制的片10制成比振子的内径大、比振子的外径小的环状,则由于这样相对地使刚性提高,所以,可以通过将厚度减薄等方法使平面外振动的固有频率不发生变化,这样可以在基本上不使平面外振动的固有频率变化的情况下降低扭转振动的固有频率。如此对扭转模式的固有频率和驱动频带进行比较,在恰当的位置上配置片10。
图10是表示第五种实施形式的振子的扭转模式的频率响应曲线和驱动频带的图。
本实施形式,以驱动频带包含具有比驱动频带高的固有频率、低的固有频率的扭转模式的共振频率响应增益相互相等的区域的方式进行设定。
由于即使使扭转模式的固有频率处于驱动频带之外,仍然存在着扭转模式的强制振动响应增益,所以,尽可能在响应小的区域进行驱动,能够更稳定的进行驱动。但是,由于存在多个阶数的扭转模式,所以比驱动频带高的频带及比驱动频带低的频带均含有扭转模式的固有频率。从而,在同时将这些响应增益均尽可能地抑制在最低限度的区域内进行驱动时,扭转模式的影响最小。
因此,在本实施形式中,按如下方式设定驱动频带:使将振子的滑动部起振时的扭转模式的响应增益相等的频率包含在驱动频带内。此外,优选的驱动频带的设定方式是:使在驱动频带内的阶数不同的相邻的扭转模式的各个响应增益的最大值相等。在图10中,以使在驱动频带内的5阶扭转模式的响应增益的最大值与6阶的扭转模式的响应增益的最大值相等的方式设定频带。
借此,可以在把来自阶数相邻的扭转模式的响应控制在最小限度的条件下进行驱动。
图11是表示第六种实施形式的振子的扭转模式的固有频率与驱动频带的图。
本实施形式中,最靠近驱动频带的扭转模式为1阶,并且使该1阶扭转模式的固有频率存在于驱动频带高的频带内。
通过使1阶扭转模式处于比驱动频带高的频带内,在低于驱动频带的频带内不存在扭转模式,可以很容易地在扭转模式的强制振动的响应增益小的频带内驱动振动波马达。
图12是表示采用第七种实施形式的振子的振动波马达的剖面图。图中的箭头表示本实施形式的振子在滑动部所受到的反作用力的方向。
当振子与移动子4接触时,移动子4的滑动部受到在与滑动面垂直的方向上作用的反作用力及在与滑动面平行的方向上作用的摩擦力。这里,移动子4的接触部的构造为在它受到垂直方向的反作用力时,沿与振子的振动方向大致相同的方向位移。由于摩擦力由该反作用力与滑动面的摩擦系数决定,所以摩擦力是非常小的。
因此,在本实施形式中,作用在移动子上的力可以认为只有通过滑动部且垂直于滑动部的反作用力。由于振子受到来自移动子的通过滑动部且垂直于滑动部的反作用力,所以加到振动部上的起振力成为如图12中箭头所示的起振力。
本实施形式以振子的反作用力通过振子的扭转模式的扭转中心0的方式设定滑动部的位置。这样配置滑动部,使得即使由于在滑动部生成的凹凸产生加到振子上的其它的起振力,也由于其成为通过移动子4的扭转中心0的反作用力,所以不能成为扭转振子的力偶,可以缩小扭转模式的响应位移。
图13是表示本发明的第八种实施形式的振动波马达的振子的透视图,图14是图13的剖面图。
本实施形式的振子是将弹性体1的圆环部1A的扭转振动用于驱动振动的扭转振动型的振动波马达。
通过将驱动电压外加到固定于支承圆板部1B的背面的压电元件2上,产生使支承圆板部1B弯曲的起振力。支承圆板部1B的弯曲成为圆环部1A的变形的起振力,使圆环部1A上发生扭转模式。
这时,如圆环部1A沿轴向的弯曲振动的固有频率存在于扭转模式的驱动频带内,则有可能发生因滑动部生成的凹凸引起的驱动频率的起振力引发作为强制振动的不需要的弯曲振动的情况。
因此,在本实施形式中,利用和上面所描述的各种实施形式相同的方法,使弯曲振动的固有频率处于扭转模式的频带之外。进而,通过驱动频带包括在振子的滑动部起振的响应振幅相同的区域,可以减少不需要的模式的响应成分。
Claims (9)
1.一种振动波驱动装置,其具有振子和接触体,所述振子上配备有电能-机械能转换元件和固定该电能-机械能转换元件的弹性体,所述接触体被加压与该振子接触,通过将规定的驱动频带的交变信号供应给该电能-机械能转换元件,在该振子上产生弯曲振动和扭转振动,并通过在该振子上的弯曲振动所产生的驱动振动,使所述接触体进行移动,其特征为,
所述弹性体具有圆环状的振动部、把所述弹性体安装到其它构件上用的固定部、以及连接该振动部和该固定部的支承部,该支承部的厚度比该振动部的厚度和该固定部的厚度都小,
该支承部形成为这样的形状:当在所述电能-机械能转换元件上施加处于所述驱动频带内的交变电压时,在所述扭转振动的频率不会达到固有振动频率的程度。
2.如权利要求1所述的振动波驱动装置,其特征为,在该振子上存在以下两种其它方式的振动模式:在第一种振动模式中,固有频率的频带高于所述驱动频带,在另一种振动模式中,固有频率的频带低于所述驱动频带,
在对所述振子加振时,分别使该两种其它方式的振动模式所产生的响应增益相同时的频率包含在所述驱动频带内。
3.如权利要求1所述的振动波驱动装置,其特征为,在所述弹性体的支承部上,所述固定部侧与所述振动部侧的刚性是不同的。
4.如权利要求1所述的振动波驱动装置,其特征为,就所述弹性体的支承部的刚性而言,在所述扭转振动中应变比其它部位上的应变大的部位的刚性不同于所述支承部上的其它部位的刚性。
5.如权利要求1所述的振动波驱动装置,其特征为,所述弹性体配备有与所述接触体接触的圆环状的振动部,所述振动部被固定在多个圆环状的支承构件上。
6.如权利要求1所述的振动波驱动装置,其特征为,所述弹性体配备有与所述接触体接触的圆环状的振动部,所述振动部被固定在圆环状的支承构件上,所述圆环状的支承构件的内径大于所述振子的内径,其外径小于所述振子的外径。
7.如权利要求1所述的振动波驱动装置,其特征为,所述弹性体配备有与所述接触体接触的圆环状振动部,所述扭转振动是所述振动部以与该振动部同心的圆为轴心发生扭转的振动。
8.如权利要求7所述的振动波驱动装置,其特征为,在所述振子与所述接触体接触的滑动部上作用有所述振动部与所述接触体之间的摩擦力和对所述接触体加压的加压力的合力,所述扭转振动的轴心位于作用于所述滑动部上的合力的延长线上。
9.如权利要求1所述的振动波驱动装置,其特征为,所述扭转振动的1阶模式下的固有频率位于比所述驱动频带高的频带内。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001373654A JP3805242B2 (ja) | 2001-12-07 | 2001-12-07 | 振動波駆動装置 |
| JP373654/2001 | 2001-12-07 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1424814A CN1424814A (zh) | 2003-06-18 |
| CN1268053C true CN1268053C (zh) | 2006-08-02 |
Family
ID=19182331
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN02153876.XA Expired - Fee Related CN1268053C (zh) | 2001-12-07 | 2002-12-04 | 振动波驱动装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7245058B2 (zh) |
| JP (1) | JP3805242B2 (zh) |
| CN (1) | CN1268053C (zh) |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7129618B2 (en) * | 2003-03-31 | 2006-10-31 | Canon Kabushiki Kaisha | Control apparatus capable of low-speed driving of vibration type driving apparatus, actuating apparatus using the control apparatus, control method capable of low-speed driving of vibration type driving apparatus, and storage medium storing program including program codes capable of realizing the control method |
| JP4478407B2 (ja) * | 2003-06-30 | 2010-06-09 | キヤノン株式会社 | 制御装置およびプログラム |
| JP4290168B2 (ja) * | 2005-03-31 | 2009-07-01 | キヤノン株式会社 | 振動波駆動装置 |
| JP5137406B2 (ja) * | 2007-01-11 | 2013-02-06 | キヤノン株式会社 | 振動型駆動装置 |
| EP2126592A1 (en) * | 2007-04-03 | 2009-12-02 | Canon Kabushiki Kaisha | Liquid conveying apparatus and liquid conveying method using micro-fluid device |
| JP5184909B2 (ja) * | 2008-02-13 | 2013-04-17 | キヤノン株式会社 | 揺動体装置及び光偏向装置 |
| US10274553B2 (en) * | 2013-03-15 | 2019-04-30 | Canon U.S.A., Inc. | Needle placement manipulator with attachment for RF-coil |
| JP6468735B2 (ja) | 2013-07-04 | 2019-02-13 | キヤノン株式会社 | 振動型駆動装置、画像形成装置、及びロボット |
| JP6467434B2 (ja) | 2014-02-27 | 2019-02-13 | ザ ブリガム アンド ウィメンズ ホスピタル インコーポレイテッドThe Brigham and Women’s Hospital, Inc. | 載置装置 |
| WO2015171988A1 (en) | 2014-05-09 | 2015-11-12 | Canon U.S.A., Inc. | Positioning apparatus |
| JP6579836B2 (ja) | 2014-07-16 | 2019-09-25 | キヤノン株式会社 | 振動型アクチュエータ及び光学装置 |
| EP3190996A4 (en) | 2014-09-12 | 2018-04-25 | Canon U.S.A., Inc. | Needle positioning apparatus |
| US9867673B2 (en) | 2015-07-14 | 2018-01-16 | Canon U.S.A, Inc. | Medical support device |
| US10639065B2 (en) | 2015-07-21 | 2020-05-05 | Canon U.S.A., Inc. | Medical assist device |
| JP2017070115A (ja) | 2015-09-30 | 2017-04-06 | キヤノン株式会社 | 振動型アクチュエータ、振動型アクチュエータの駆動方法、レンズ鏡筒、撮像装置及びステージ装置 |
| JP6866128B2 (ja) | 2015-12-04 | 2021-04-28 | キヤノン株式会社 | 振動型アクチュエータの駆動方法、振動型駆動装置及び機械装置 |
| WO2017132505A1 (en) | 2016-01-29 | 2017-08-03 | Canon U.S.A., Inc. | Tool placement manipulator |
| JP6948389B2 (ja) | 2016-10-19 | 2021-10-13 | キヤノン ユーエスエイ, インコーポレイテッドCanon U.S.A., Inc | 穿刺器具を位置決めするための配置マニピュレータおよびアタッチメント |
| US11081979B2 (en) | 2017-04-25 | 2021-08-03 | Canon Kabushiki Kaisha | Vibration-type driving apparatus that detects undesired vibrations, control method for the vibration-type driving apparatus, storage medium, robot, pan head for image pickup apparatus, and image forming apparatus |
| JP2018186698A (ja) * | 2017-04-25 | 2018-11-22 | キヤノン株式会社 | 振動型駆動装置、振動型駆動装置の制御方法、プログラム、ロボット、撮像装置の雲台及び画像形成装置 |
Family Cites Families (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US53858A (en) * | 1866-04-10 | Improvement in looms | ||
| US121869A (en) * | 1871-12-12 | Improvement in tin cans | ||
| US96970A (en) * | 1869-11-16 | Improvement in straw-cutters | ||
| US5061882A (en) * | 1987-02-09 | 1991-10-29 | Nikon Corporation | Power supply frequency regulating device for vibration wave driven motor |
| JP2698412B2 (ja) | 1989-02-14 | 1998-01-19 | キヤノン株式会社 | 振動波装置 |
| EP0383309B1 (en) | 1989-02-14 | 1997-06-04 | Canon Kabushiki Kaisha | Vibration wave motor |
| US5173623A (en) * | 1989-05-15 | 1992-12-22 | Texas Instruments Incorporated | High performance BiCMOS logic circuits with full output voltage swing up to four predetermined voltage values |
| JPH02303374A (ja) * | 1989-05-18 | 1990-12-17 | Aisin Seiki Co Ltd | 超音波モータ |
| DE69111481T2 (de) * | 1990-02-14 | 1996-01-18 | Nikon Corp | Antriebsvorrichtung für einen Ultraschallwellenmotor. |
| JP3047025B2 (ja) * | 1990-09-11 | 2000-05-29 | セイコーインスツルメンツ株式会社 | 超音波モータ |
| JP3015090B2 (ja) | 1990-10-05 | 2000-02-28 | キヤノン株式会社 | 振動波駆動装置 |
| JP2972010B2 (ja) * | 1992-01-08 | 1999-11-08 | キヤノン株式会社 | 振動型アクチュエーター駆動制御装置 |
| JP3287614B2 (ja) | 1992-10-01 | 2002-06-04 | キヤノン株式会社 | 超音波モータ |
| JP3107933B2 (ja) | 1992-12-03 | 2000-11-13 | キヤノン株式会社 | 振動波駆動装置および振動波駆動装置を備えた装置 |
| JPH06178560A (ja) | 1992-12-03 | 1994-06-24 | Canon Inc | 振動波モータおよびプリンタ装置 |
| JPH07115782A (ja) | 1993-10-13 | 1995-05-02 | Canon Inc | 振動波駆動装置 |
| JPH07143765A (ja) * | 1993-11-12 | 1995-06-02 | Seiko Instr Inc | 超音波モータ及び超音波モータ付き電子機器 |
| US5760529A (en) | 1995-04-24 | 1998-06-02 | Canon Kabushiki Kaisha | Vibration wave actuator and system using the same |
| US5949178A (en) | 1995-04-26 | 1999-09-07 | Canon Kabushiki Kaisha | Vibration wave driving apparatus and a vibration member, and manufacturing method of the apparatus and the member |
| JP3437359B2 (ja) | 1996-01-08 | 2003-08-18 | キヤノン株式会社 | 振動波駆動装置の制御装置 |
| JP3728606B2 (ja) * | 1996-01-31 | 2005-12-21 | 株式会社ニコン | 振動モータ |
| US6054795A (en) | 1996-04-24 | 2000-04-25 | Canon Kabushiki Kaisha | Driving apparatus for vibration type actuator device |
| JPH1084682A (ja) | 1996-09-09 | 1998-03-31 | Canon Inc | 振動波駆動装置および振動波駆動装置を有する機器 |
| JPH10178792A (ja) | 1996-12-20 | 1998-06-30 | Canon Inc | 駆動制御装置およびこれを用いた装置、複写機 |
| US6107723A (en) | 1996-12-26 | 2000-08-22 | Canon Kabushiki Kaisha | Vibrating type driving device |
| JP3789017B2 (ja) | 1996-12-27 | 2006-06-21 | キヤノン株式会社 | 位置制御装置 |
| JP3347654B2 (ja) | 1997-10-29 | 2002-11-20 | キヤノン株式会社 | 駆動装置 |
| JP3332832B2 (ja) | 1997-12-12 | 2002-10-07 | キヤノン株式会社 | 振動型アクチュエータ装置 |
| EP1638197B1 (en) | 1997-12-12 | 2007-10-17 | Canon Kabushiki Kaisha | A driving apparatus of a vibration type actuator |
| US5949851A (en) * | 1998-05-28 | 1999-09-07 | Mahaffey; Shannon R. | Home weather emergency warning system |
| JP2000184759A (ja) | 1998-12-10 | 2000-06-30 | Canon Inc | 振動型アクチュエ―タ駆動装置 |
| JP4428747B2 (ja) | 1999-02-22 | 2010-03-10 | キヤノン株式会社 | 振動型アクチュエータ駆動制御装置、駆動制御方法、及び記憶媒体 |
| JP2000261280A (ja) | 1999-03-08 | 2000-09-22 | Tdk Corp | 圧電バルク振動子 |
| JP3226894B2 (ja) | 1999-03-25 | 2001-11-05 | セイコーインスツルメンツ株式会社 | 超音波モータ及び超音波モータ付き電子機器 |
| US6724607B2 (en) | 2000-09-28 | 2004-04-20 | Canon Kabushiki Kaisha | Driving apparatus of vibration type actuator |
| JP2002204585A (ja) | 2000-12-28 | 2002-07-19 | Canon Inc | 振動型アクチュエータの制御装置 |
-
2001
- 2001-12-07 JP JP2001373654A patent/JP3805242B2/ja not_active Expired - Fee Related
-
2002
- 2002-12-03 US US10/307,926 patent/US7245058B2/en not_active Expired - Lifetime
- 2002-12-04 CN CN02153876.XA patent/CN1268053C/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US20030107299A1 (en) | 2003-06-12 |
| JP2003180092A (ja) | 2003-06-27 |
| CN1424814A (zh) | 2003-06-18 |
| US7245058B2 (en) | 2007-07-17 |
| JP3805242B2 (ja) | 2006-08-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1268053C (zh) | 振动波驱动装置 | |
| CN1186825C (zh) | 振动元件和振动波驱动装置 | |
| CN1268442C (zh) | 振动件以及具有该振动件的振动波驱动装置 | |
| JPWO2006137453A1 (ja) | 超音波振動を利用する研磨装置 | |
| CN1753296A (zh) | 超声波电动机及其运转方法 | |
| CN1653849A (zh) | 转换器 | |
| CN1592101A (zh) | 用于微机械式环形谐振器的温度补偿装置 | |
| CN1119270A (zh) | 振动陀螺仪 | |
| JPH0241677A (ja) | 超音波モータ | |
| JP2003180092A5 (zh) | ||
| CN1534856A (zh) | 振动型驱动装置的控制装置和控制方法、致动装置 | |
| CN1035647C (zh) | 压电马达 | |
| JP5701032B2 (ja) | 振動型駆動装置 | |
| CN1780135A (zh) | 平板型压电超声电机 | |
| CN1138588C (zh) | 振动适配器 | |
| CN1265896C (zh) | 振动波驱动装置 | |
| CN1736019A (zh) | 压电式电机的操作方法,以及具有空心圆柱振荡器形式定子的压电式电机 | |
| CN201656811U (zh) | 一种面内行波型旋转超声电机 | |
| CN1157916A (zh) | 振动发生器 | |
| JP4419874B2 (ja) | 超音波美容装置 | |
| CN1202795C (zh) | 超声波美容器 | |
| CN1407706A (zh) | 压电电机 | |
| KR100376137B1 (ko) | 원환형 압전초음파 모터 | |
| CN201113830Y (zh) | 一种采用外支撑结构定子驱动的超声波电机 | |
| JPS61191278A (ja) | 超音波モ−タ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20060802 Termination date: 20171204 |