JP3805242B2 - 振動波駆動装置 - Google Patents
振動波駆動装置 Download PDFInfo
- Publication number
- JP3805242B2 JP3805242B2 JP2001373654A JP2001373654A JP3805242B2 JP 3805242 B2 JP3805242 B2 JP 3805242B2 JP 2001373654 A JP2001373654 A JP 2001373654A JP 2001373654 A JP2001373654 A JP 2001373654A JP 3805242 B2 JP3805242 B2 JP 3805242B2
- Authority
- JP
- Japan
- Prior art keywords
- vibration
- vibrating
- mode
- driving
- frequency
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000006243 chemical reaction Methods 0.000 claims description 32
- 238000005452 bending Methods 0.000 claims description 23
- 239000000463 material Substances 0.000 claims description 5
- 230000005284 excitation Effects 0.000 description 22
- 238000010586 diagram Methods 0.000 description 9
- 239000002783 friction material Substances 0.000 description 6
- 238000006073 displacement reaction Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 230000002093 peripheral effect Effects 0.000 description 4
- 238000009826 distribution Methods 0.000 description 3
- 230000007423 decrease Effects 0.000 description 2
- 230000006866 deterioration Effects 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 239000007769 metal material Substances 0.000 description 2
- 239000000843 powder Substances 0.000 description 2
- PNEYBMLMFCGWSK-UHFFFAOYSA-N Alumina Chemical compound [O-2].[O-2].[O-2].[Al+3].[Al+3] PNEYBMLMFCGWSK-UHFFFAOYSA-N 0.000 description 1
- 230000002159 abnormal effect Effects 0.000 description 1
- 238000009825 accumulation Methods 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 239000000805 composite resin Substances 0.000 description 1
- 239000012141 concentrate Substances 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 239000000945 filler Substances 0.000 description 1
- 230000017525 heat dissipation Effects 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 239000004810 polytetrafluoroethylene Substances 0.000 description 1
- 229920001343 polytetrafluoroethylene Polymers 0.000 description 1
- 230000000750 progressive effect Effects 0.000 description 1
- 238000005245 sintering Methods 0.000 description 1
- 238000004381 surface treatment Methods 0.000 description 1
- 238000003786 synthesis reaction Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 238000007740 vapor deposition Methods 0.000 description 1
Images






















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/16—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors using travelling waves, i.e. Rayleigh surface waves
- H02N2/163—Motors with ring stator
Landscapes
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
- Apparatuses For Generation Of Mechanical Vibrations (AREA)
Description
【発明の属する技術分野】
本発明は、電気機械エネルギ変換素子により弾性体に駆動振動を形成する振動体を有する振動波駆動装置に関する。
【0002】
【従来の技術】
振動波駆動装置は、圧電素子などの電気機械エネルギ変換素子により金属等の弾性体に駆動振動を形成する振動体を基本的構成として有し、前記振動体と前記振動体に加圧接触する接触体(移動体)を前記振動体に形成する駆動振動により相対駆動する。そして、前記振動体を固定し、前記接触体を移動体とした振動波モータは、低速度で大きな駆動力が取り出せるアクチュエータであるとともに、速度むらが少ないことが特長である。
【0003】
特に、進行波型の振動波モータは、弾性体に進行性の振動波を起こし、これに加圧接触した移動体を連続的に駆動することにより、より滑らかな駆動が可能である。
【0004】
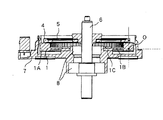
図15に従来の振動波モータの構成を示す。この従来の振動波モータは、ハウジング7にビスなどで固定された円環形状の金属等の弾性体1と、弾性体1に摩擦材3を介して摩擦接触する移動体4と、移動体4を弾性体1に加圧接触させ、移動体4の回転を出力する加圧ばね5および回転軸6によって構成されている。回転軸6は玉軸受8によってハウジング7に回転自在に支持されている。弾性体1は、最外周に位置する円環形状の振動部1Aと、振動部1Aの内周側に位置する支持円板部1Bと、支持円板部1Bよりも内周側に位置するフランジ部1Cとにより一体的に構成され、金属材料の切削加工あるいは粉末焼結などの型成形によって製作され、この弾性体1の片面に接着剤などで圧電素子を接合して振動体を形成している。
【0005】
図16は従来の振動波モータの振動体の斜視図を示す。円環形状の振動部1Aの一方の平面には、複数の放射状の溝4が軸方向に形成されており、この複数の溝によって形成されたくし歯状の突起1Eの上面には摩擦材3として、PTFEを主体とする複合樹脂材料が接着されている。この摩擦材料には、用途に合わせて表面処理を施した金属材料や、アルミナセラミックも用いられる。
【0006】
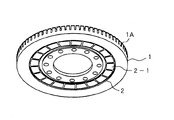
弾性体1のもう一方の複数溝が形成されていない面には、図17に示すように、電気機械エネルギ変換素子として円環状の圧電素子2が接着されており、圧電素子2には図17に示すパターン電極2−1が蒸着または印刷によって形成されている。
【0007】
パターン電極2−1は、振動体の円環部に励起する振動モードの次数に対応して、次数の四倍の数に等分割されており、それぞれの電極には、順に時間位相が90°ずつ異なる略サイン波形状の交流電圧が印加される。励起する振動モードの固有振動数付近の周波数で交流電圧を印加すると、圧電素子2の伸縮により弾性体に加わる曲げモーメントによって弾性体が共振し、 90°ずつ異なる交流電圧に対してそれぞれ励起される振動は、その合成によって進行波となる。このように円環形状の振動部に均等に圧電素子の加振部を配置しているため、振動振幅が均一化され、より長期間にわたって高精度な駆動を維持できている。
【0008】
また、いわゆる「鳴き」低減のための技術として本出願人により特開平2-214477号公報に開示された例は、駆動に用いているモードとは別の振動モードが接触部で発生する加振力による自励振動として発生する場合にそのモードの波長の1/2の整数倍の位置の動剛性を不均一として、同じモードの複数の振動の固有振動数を異ならしめて進行波を生じにくくするものである。接触部では、移動体と振動体との接触による加振力が働くためにこのような鳴きが発生する場合があるが、この手段によって鳴きを発生しづらくすることができている。図18の溝4−1は、他の溝4より深くなっており、全周16箇所に配置されている。これによって、16箇所に節を持つ、8次のモードの2つの固有振動数に差が生じ、進行波としての自励振動が生じにくくなっている。
【0009】
【発明が解決しようとする課題】
しかしながら、従来の構成のように、振動の均一化、あるいは他のモードの自励振動の低減をしても、長期にわたって性能を維持するのが困難である場合があった。
【0010】
図19は従来の弾性体の駆動モード(面外曲げモードの9次)付近の他の固有モード(ねじりモードの5次と6次、面内曲げモードの2次と3次)とその固有振動数を示し、図20に示した弾性体の変形図のように、円環部が軸方向にたわみ変形する面外9次モードを駆動に用いている。この例では、9次の駆動周波数に対して下方の周波数および上方の周波数域にはより低次数、高次数の面外8次、面外10次モードが存在している。
【0011】
また、面外モード以外では、図21に示すように円環部が円環部の断面の中心付近を軸にして交互にねじれるねじりモードが存在し、さらに円環の対称軸に垂直な面内で曲げ振動する面内モードが存在する。
【0012】
図17に示した圧電素子の電極パターンでは、圧電素子の各パターン電極での加振力は、位相の等しい9箇所の加振点が均等に円周上に配置されるため、9次モード以外の加振力は相殺されて存在しない。そのため、駆動周波数付近の他のモードを励起する加振力はゼロである。
【0013】
図22の曲線Aは、振動体のみの場合での圧電素子に印加する駆動電圧の周波数に対する振動変位の周波数応答曲線を示す。このように、他のモードに加振力がないため、他のモードの応答は現れない。
【0014】
図22の曲線Bは、弾性体の摩擦部に等間隔な9点で加振した場合の周波数応答曲線を示し、この場合は曲線Aの場合と同様に、応答曲線は9次のモードにしか現れない。
【0015】
一方、振動体への加振力は、圧電素子からの加振力、および加圧接触する移動体からの加振力の2つの合力であるから、移動体を駆動している状態では圧電素子からの9次の加振と、移動体との9個の領域での均等な加振力を受けているはずであり、駆動状態においても他のモードが強制励振されることはない。
【0016】
しかしながら、摩擦材料に凹凸がある場合は異なる応答を示す。摩擦材料が1点のみ突出している場合、移動体との接触圧力は突出した1点に集中し、他の接触部の圧力が低下する。突出した1点を駆動振動である進行波が通過するたびに振動体はこの突出した点において駆動周波数での加振を受けることになる。
【0017】
図22の曲線Cに振動体の摩擦部の1点に加振した場合の周波数応答曲線を示す。9点の均等加振の場合と異なり、他のモードの応答が現れていることがわかる。
【0018】
図23は面外曲げモード、ねじりモードの応答を別の応答曲線として示し、図23(A)は低振幅(低回転数)時、図23(B)は大振幅(高回転数)時のものである。面外曲げ9次モードの応答曲線は、振幅を大きくすることによる接触状態の変化から、共振周波数が振幅の増加とともに徐々に低下するような非線形性を示す。
【0019】
ここで、面外曲げ9次モードを駆動モードとして励振するため、図に示した駆動周波数帯域での加振を行う。このとき駆動モードに近接しているねじり5次のモードは、駆動に用いる周波数帯域において応答が大きくなっている。このことから摩擦部に凹凸がある駆動状態では、駆動周波数での強制励振によってねじり5次の振動が生じ、駆動モードである面外9次の振動に重畳されてしまう恐れがある。
【0020】
実際に、摩擦部に凹凸がある状態での振動体の振幅分布を測定したところ、図24のような振幅分布を示すことがわかった。これは、9次モードにねじりの5次モードが同じ周波数で重畳されたことによって、14箇所の振幅極大点をもっているものである。
【0021】
これは、駆動周波数に応答して不要な他のモードが発生しているため、不要振動も駆動周波数での振動として生じるもので、このため鳴きのように異音を発することはない。
【0022】
しかしながら、合成振動の振動振幅は不均一となり、摩擦部の部分的な摩耗を促進し、偏摩耗の原因となる。14箇所での偏摩耗が進行すると、9次モードを駆動している振動体との空隙が広がり、より5次のモードが発生しやすくなる。このためにさらに偏摩耗が促進され、安定した接触が保てず、出力特性が劣化していく。
【0023】
また、摩擦部の凹凸は、製造時のキズによるものや、駆動状態での摩耗粉の一時的な堆積や、充填材の脱落によっても生じるため、これらの凹凸がきっかけとなって移動体から受ける加振力が他のモードを駆動周波数で加振する加振力となる。
【0024】
本出願に係る発明の目的は、通常の使用状態で生じる摩擦部の凹凸に対して強制励振されうる駆動モード以外の他モードを駆動周波数帯域から離し、応答振幅を減らすことによって他モードの重畳による振動の不均一を排除し、長期間にわたって出力性能を維持できる振動波駆動装置を提供するものである。
【0025】
【課題を解決するための手段】
本出願に係る発明の目的を実現する第1の構成は、円環形状の振動部を少なくとも備える弾性体に電気機械エネルギ変換素子を接合した振動体と、前記振動部に設けた摺動部において加圧接触する接触体とを有し、前記電気機械エネルギ変換素子に所定の駆動周波数帯域の交番電圧を印加することによって、前記振動部の対称軸方向を主とする屈曲振動を駆動モードとする駆動振動と前記振動部が該振動部内の円周上の節円を中心としてねじれるねじりモードが前記振動体に生じ、前記駆動振動によって前記振動体と前記接触体とを相対的に駆動する振動波駆動装置において、前記振動体を他部材に固定するための前記振動体の固定部と前記振動部との間に設けられる支持部は、前記電気機械エネルギ変換素子に前記駆動周波数帯域内の交番電圧を印加した場合に、前記ねじりモードが固有振動数に達しない形状に形成されていることを特徴とする。
【0026】
本出願に係る発明の目的を実現する第2の構成は、弾性体に電気機械エネルギ変換素子を接合して駆動振動を前記弾性体に形成する振動体と、前記振動部に設けた摺動部において加圧接触する接触体とを有し、前記電気機械エネルギ変換素子に交番電圧を印加することによって所定の固有振動モードを駆動モードとする駆動振動と該駆動信号とは異なる他振動が前記振動体に生じ、前記駆動振動によって前記振動体と前記接触体を相対的に駆動する振動波駆動装置において、前記振動体を他部材に固定するための前記振動体の固定部と前記振動部との間に設けられる支持部は、前記電気機械エネルギ変換素子に所定の駆動周波数帯域内の交番電圧を印加した場合に、前記他振動が固有振動数に達しない形状に形成されていることを特徴とする。
【0027】
本出願に係る発明の目的を実現する第3の構成は、円環形状の振動部を少なくとも備える弾性体に電気機械エネルギ変換素子を接合した振動体と、前記振動部に設けた摺動部において加圧接触する接触体とを有し、前記電気機械エネルギ変換素子に所定の駆動周波数帯域の交番電圧を印加することによって、前記振動部の対称軸方向を主とする屈曲振動を駆動モードとする駆動振動と前記振動部が該振動部内の円周上の節円を中心としてねじれるねじりモードが前記振動体に生じ、前記駆動振動によって前記振動体と前記接触体とを相対的に駆動する振動波駆動装置において、前記振動体を支持する支持部材は、前記電気機械エネルギ変換素子に前記駆動周波数帯域内の交番電圧を印加した場合に、前記ねじりモードが固有振動数に達しないように、前記振動体と同心状に配置された複数の粘性抵抗の低い材料で形成されていることを特徴とする。
【0028】
本出願に係る発明の目的を実現する第4の構成は、円環形状の振動部を少なくとも備える弾性体に電気機械エネルギ変換素子を接合した振動体と、前記振動部に設けた摺動部において加圧接触する接触体とを有し、前記電気機械エネルギ変換素子に所定の駆動周波数帯域の交番電圧を印加することによって、前記振動部の対称軸方向を主とする屈曲振動を駆動モードとする駆動振動と前記振動部が該振動部内の円周上の節円を中心としてねじれるねじりモードが前記振動体に生じ、前記駆動振動によって前記振動体と前記接触体とを相対的に駆動する振動波駆動装置において、前記振動体を支持する支持部材は、前記電気機械エネルギ変換素子に前記駆動周波数帯域内の交番電圧を印加した場合に、前記ねじりモードが固有振動数に達しないように、前記振動部の幅よりも狭い粘性抵抗の低い材料で形成されていることを特徴とする。
【0035】
【発明の実施の形態】
(第1の実施の形態)
図1は本発明の第1の実施形態の振動体を示す。
【0036】
振動体を構成する円環形状の弾性体1の円環状の振動部1Aには、放射方向(振動体の径方向)に延びる複数の溝2が周方向に形成され、振動変位拡大用の複数のくし歯3を溝2の間に形成している。円環状振動部1Aの内径部には円環状振動部1Aを支持するための支持円板部1Bが一体的に形成されており、さらに内径部には振動体を固定するためのフランジ部1Cが一体的に形成されている。なお、支持円板部1Bは周波数調整部としての機能を兼ねている。
【0037】
図2は弾性体1における支持円板部1Bが無い場合、及び支持円板部1Bの厚さを変化させた場合における各振動体の駆動モードの固有振動数、ねじりモードの固有振動数を示す。
【0038】
図2に示すように、円環状振動部1A(支持円板部1Bおよびフランジ部1Cが無い状態)のみの面外曲げ9次モードの固有振動数は、ねじり4次モードの固有振動数とねじり5次モードの固有振動数の中央に位置している。
【0039】
ここで、この振動部1Aを支持するために支持円板部1Bおよびフランジ部1Cを設け、フランジ部1Cをビス締結する。支持円板部1Bの厚さは、振動部1Aの振動を阻害しないように十分薄い必要があるが、振動によって円環状の振動部1 Aに生ずる発熱と、摺動部での摩擦熱を外部へ導いて振動体の加熱を防ぐにはある程度の厚さが必要になる。図2は支持円板部1 Bの厚さを増していった場合の各固有振動数の推移を示している。
【0040】
ここで、駆動モードである面外曲げ9次モードの固有振動数がほとんど変化していないのに対して、ねじりモードは支持円板部1Bの厚みを増すごとに固有振動数が上昇している。
【0041】
図2の実線の縦長の○で囲んだ領域1に示す厚みの支持円板部1 B をもつ振動体では、駆動モードである面外曲げ9次モードの固有振動数とねじり5次モードの固有振動数がほぼ一致している。この形状の振動体では、振動波モータとして構成して駆動モードを励振した場合、振動体とこの振動体に加圧接触する移動体の摺動部における加振によってねじり5次モードが強制加振されてしまうおそれがある。
【0042】
そこで、本実施の形態では、支持円板部1 B の厚さを、図2に破線で囲った領域2、領域3の厚さにすることによって駆動モードの固有振動数がねじりモードの固有振動数から十分離れるようにしている。
【0043】
図3は駆動周波数−速度曲線、摺動部加振でのねじりモードの周波数応答を示す。図中に示した領域が本実施の形態の振動体を有する振動波モータの駆動周波数帯域である。
【0044】
すなわち、支持円板部1 Bの薄板部の寸法(厚み)を選択することによって異なる次数のねじりモードの中間に駆動周波数帯域を設定した結果、図3に示すようにねじりモードの固有振動数を含まない周波数帯域で駆動することができる。
【0045】
(第2の実施の形態)
図4は本発明の第2の実施形態の振動体の断面図を示す。
【0046】
本実施の形態では、支持円板部1Bの内径部近傍に、厚みが薄い部分を周波数調整部として設けている。
【0047】
駆動時に、振動部1Aは、自身の内部歪による発熱、摺動部での摩擦による発熱、圧電素子の発熱によって温度上昇する。摺動部での安定した摩擦力の確保と、圧電素子との接合部の劣化を防ぐためには所定の温度上昇に抑える必要があり、支持円板部1Bを介して伝熱させるのが有効である。
【0048】
支持円板部1Bの伝熱性能は、振動部1Aからフランジ部1Cに向かう径方向に鉛直な断面積と温度勾配によって決定される。従って他モードを避けて配置するために支持円板部1Bの厚さを薄くすると伝熱性能が損なわれ、振動部1Aの温度上昇による性能劣化・破損のおそれがある。
【0049】
そこで、本実施の形態では、支持円板部1Bの一部のみに厚みが薄い周波数調整部9を設けている。
【0050】
図5はねじり振動時の弾性体の形状の断面図を示す。
図5において、支持円板部1Bのフランジ1C側である内周側は固定端になっているため、振動時の振幅は微小であるが歪は大きい。外周の振動部1Aが回転変位するために支持円板部1Bには最大振幅をもつ位置があり、ここは振幅が大きく、歪も大きくなっている。
【0051】
一方、ねじりモードの固有振動数を下げることによって駆動周波数帯域からねじりモードの固有振動数を外す場合、歪が大きい部分の剛性を低下させることによって振動体の剛性を下げることが有効である。
【0052】
しかしながら、振動体(弾性体1)の一部を切除して剛性を下げる場合、その領域の質量も同時に低下させてしまうことになる。振動振幅が大きい部分の質量を切除する場合には、その振動モードにおける等価質量を大きくさげることとなり、固有振動数を上昇させる効果があるため、剛性の低下による固有振動数低下と相殺する関係になる。そこで、振動振幅が小さく、歪の大きい領域の形状を削除するのが効果がおおきい。
【0053】
図6は支持円板部1 Bの一部に低剛性部を設けた場合の駆動モードの固有振動数と、ねじりモードの固有振動数の関係を示す。図2に示す支持円板部全体の厚さを変化させるのに比較して、固有振動数低下の効果が十分に得られている。円環状の振動部1 Aから熱を伝達させて固定部(フランジ部1 C )へと逃がすためには、厚さが薄い部分はできるだけ幅が狭いほうが熱勾配が大きくなり、より多くの熱量を伝達することができる。そこで本実施の形態では、振幅が小さく歪が大きい、支持円板部1Bの最内周付近の厚みを薄くすることによって放熱効果を低下させずに、ねじりモードの固有振動数を低下させている。
【0054】
(第3の実施の形態)
図7は第3の実施の形態の振動体の断面図を示す。
【0055】
本実施の形態は、支持円板部1Bの最内周付近に、固定部(フランジ部1 C )に近づくに従い厚みが大きくなるようなテーパ部9を設けている。
【0056】
本実施の形態の振動体は、支持円板部1Bの最内周付近が他の部分と同じ厚みである場合には、駆動周波数帯域の上方に近接してねじりモードの固有振動数が存在している。この場合にねじりモードの固有振動数を上げることによって上方にシフトさせることが有効であるため、第2の実施の形態と同様の理由で支持円板部1Bの最内周近傍の厚みを径方向外方の部分よりも厚くしている。
【0057】
さらに本実施の形態では、最も歪が大きい部分から振幅が増大する外周側に向かって厚みを薄くするテーパとすることによって、より小領域の変更で周波数を調整できるため、駆動モードにあたえる影響を少なくできる。ここではテーパ形状としたが、複数段の階段状にしてもよい。
【0058】
(第4の実施の形態)
図8は第4の実施の形態の振動波モータの振動体の断面図を示す。
【0059】
本実施の形態の弾性体は支持円板、固定部を持たない円環形状の弾性体であって、中央部の空間を利用する中空構造とする場合に用いられる。
【0060】
本実施の形態の振動体は、弾性体1の下部に設けられた弾性材のシート10によって軸方向に支持されている。このシート10は、粘性抵抗の低い材料を用いており、例えばフェルトなどが用いられる。
【0061】
従来は振動体の内径、外径とほぼ同径のリング状のシートを用いているが、本実施の形態では、円環状の弾性体1のねじり振動の固有振動数を逃がすために、シート10の形状を弾性体1の内径側と外径側に分離した構造としている。シート10における内外径の中央部は、面外の曲げ振動に対しては変位するが、ねじり振動に対しては軸方向の変位を持たないため、この部分の剛性は面外曲げ振動に対して寄与するがねじり振動には剛性として寄与しない。このため、面外曲げ振動に対する剛性を変化させずにシート10の形状を2分して内外に分離することによってねじり振動に対する剛性を高めることができる。
【0062】
逆に、ねじり振動の固有振動数を下げる場合には、図9に示すように、フェルト製のシート10を振動体(弾性体1)の内径より大きく、振動体の外径よりも小さくしたリング形状とし、相対的に剛性を高めるために厚さを薄くするなどして面外曲げ振動の固有振動数を変えないようにすれば、ねじり振動の固有振動数を低下させることができる。
【0063】
(第5の実施の形態)
図10は第5の実施の形態の振動体のねじりモードの周波数応答曲線、駆動周波数帯域の図を示す。
【0064】
本実施の形態は、駆動周波数帯域の上方、下方にあるねじりモード(ねじり5次モード、ねじり6次モード)の共振周波数応答ゲインが互いに等しくなる領域を駆動周波数帯域が含んでいるように設定したものである。
【0065】
駆動周波数帯域外にねじりモードの固有振動数を逃がしても、ねじりモードの強制振動の応答ゲインは存在するため、できるだけ応答が小さい領域で駆動することがより安定した駆動を可能にできる。しかしながら、複数の次数のねじりモードが存在しているから、駆動周波数帯域は上方、下方にねじりモードの固有振動数を持っており、その両方の応答ゲインが最小となる領域で駆動するのが最もねじりモードの影響が少ない。
【0066】
そこで、本実施の形態では、振動体の摺動部を加振したときのねじりモードの応答ゲインが等しくなる周波数(図10の矢印に示す)を駆動周波数帯域が含むように設定している。
【0067】
これによって次数の異なる隣り合うねじりモードのどちらの応答も最小となる条件で駆動することができる。
【0068】
(第6の実施の形態)
図11は第6の実施の形態の振動体のねじりモードの固有振動数と駆動周波数帯域の図を示す。
【0069】
本実施の形態は、駆動周波数帯域の上方に最も近接した固有振動数を持つねじりモードが第1次のモードとなるようにしたものである。
【0070】
ねじり1次モードを駆動周波数帯域の上方にすることによって、駆動周波数帯域の下方にはねじりモードが存在しないため、ねじりモードの強制振動の応答ゲインがより小さい帯域で振動波モータを駆動することが可能である。
【0071】
(第7の実施の形態)
図12は第7の実施の形態の振動体を用いた振動波モータの断面図を示す。図中矢印で示したのは本実施の形態の振動体が摺動部において受ける反力の方向を表したものである。
【0072】
摺動部において、振動体が移動体4に接触すると、移動体4は摺動面に鉛直な方向の抗力と、摺動面の摩擦係数と前記抗力によって決まる摺動面に平行な摩擦力を受ける。ここで、移動体4の接触部は、鉛直な方向の力を受けたときに振動体の振動方向と略同方向に変位するような構造にしてあるため、摺動部に平行な摩擦力は微小となる。
【0073】
そこで、本実施の形態では移動体4に働く力は摺動部を通り、摺動部に鉛直な方向の抗力のみと考えてよい。振動体は、同様に移動体4からの反力として摺動部を通り摺動部に鉛直な方向の反力を受けるため、振動部1 Aへの加振力は図12に矢印で示したような加振力となる。
【0074】
本実施の形態は、振動体への反力が振動体のねじりモードのねじりの中心Oを通るように摺動部の位置を設定している。このように配置することによって、摺動部で生じた凹凸によって振動体への別の加振力が生じても、移動体4のねじり中心Oを通る反力となるために振動体をねじる偶力とはならず、応答変位をさらに小さくすることができる。
【0075】
(第8の実施の形態)
図13は本発明の第8の実施の形態の振動波モータの振動体の斜視図、図14は図13に示す振動体の断面図を示す。
【0076】
本実施の形態の振動体は、弾性体1の円環部1Aのねじり振動を駆動振動に用いるねじり振動型の振動波モータである。
【0077】
支持円板部1Bの裏面に固着した圧電素子2に駆動電圧を印加することによって、支持円板部1Bをたわませる加振力を生じさせる。支持円板部1Bのたわみが円環部1Aの変形の加振力となって円環部1Aにねじりモードを発生させる。
【0078】
このとき、円環部1Aの軸方向の曲げ振動の固有振動数がねじりモードの駆動周波数帯域に存在すると、摺動部で生じた凹凸による駆動周波数の加振力によって不要な曲げ振動が強制振動として発生する恐れがある。
【0079】
そこで本実施の形態では、曲げ振動の固有振動数をねじりモードの駆動周波数帯域外としたものである。さらに、振動体の摺動部加振での応答振幅が等しくなる領域を駆動周波数帯域が含むようにすることによって不要なモードの応答成分を減らすことができる。
【0080】
【発明の効果】
本発明によれば、曲げ振動を駆動モードとする振動波モータ等の振動波駆動装置において、駆動振動とは異なる振動が強制振動として重畳されることによる性能劣化を低減することができる。
【図面の簡単な説明】
【図1】第1の実施の形態の振動体の断面図
【図2】第1の実施の形態の振動体の固有振動数を示す図
【図3】第1の実施の形態の駆動周波数帯域を示す図
【図4】第2の実施の形態の振動体の断面図
【図5】ねじりモードの振動形状をあらわす断面図
【図6】第2の実施の形態の振動体の固有振動数を示す図
【図7】第3の実施の形態の振動体の断面図
【図8】第4の実施の形態の振動体の断面図
【図9】第4の実施の形態の別形態の振動体の断面図
【図10】第5の実施の形態の駆動周波数帯域を示す図
【図11】第6の実施の形態の駆動周波数帯域を示す図
【図12】第7の実施の形態の振動波モータの断面図
【図13】第8の実施の形態の振動体の斜視図
【図14】第8の実施の形態の振動体の断面図
【図15】従来の振動波モータの断面図
【図16】従来の振動体の斜視図
【図17】従来の振動体の斜視図
【図18】従来の不要振動低減手段
【図19】従来の振動体の固有振動数表
【図20】駆動モードの変形図
【図21】ねじりモードの変形図
【図22】振動体の周波数応答曲線
【図23】振動体の周波数応答曲線と駆動周波数帯域を示す図
【図24】ねじりモード重畳時の振幅分布
【符号の説明】
1 振動体
1A 振動部(円環部)
1B 支持円板部
1C フランジ部
1D 溝
1E 突起
2 圧電素子
2−1 パターン電極
3 摩擦材
4 移動体
5 加圧ばね
6 回転軸
7 ハウジング
8 玉軸受
9 周波数調整部
10 フェルト
Claims (10)
- 円環形状の振動部を少なくとも備える弾性体に電気機械エネルギ変換素子を接合した振動体と、前記振動部に設けた摺動部において加圧接触する接触体とを有し、前記電気機械エネルギ変換素子に所定の駆動周波数帯域の交番電圧を印加することによって、前記振動部の対称軸方向を主とする屈曲振動を駆動モードとする駆動振動と前記振動部が該振動部内の円周上の節円を中心としてねじれるねじりモードが前記振動体に生じ、前記駆動振動によって前記振動体と前記接触体とを相対的に駆動する振動波駆動装置において、
前記振動体を他部材に固定するための前記振動体の固定部と前記振動部との間に設けられる支持部は、前記電気機械エネルギ変換素子に前記駆動周波数帯域内の交番電圧を印加した場合に、前記ねじりモードが固有振動数に達しない形状に形成されていることを特徴とする振動波駆動装置。 - 次数の異なる前記ねじりモードが固有振動数に達する前記交番信号の周波数が前記駆動周波数帯域の上方および下方にそれぞれ存在し、前記次数の異なるねじりモードの摺動部加振に対する周波数応答ゲインが等しくなる周波数が前記駆動周波数帯域に存在することを特徴とする請求項1記載の振動波駆動装置。
- 前記振動体の摺動部と前記接触体との摩擦力と、前記接触体を加圧接触する加圧力との合力の方向の範囲内であって、前記ねじりモードのねじりの中心軸を含むような位置に前記摺動部を設けたことを特徴とする請求項1または2記載の振動波駆動装置。
- 前記支持部の前記固定部近傍に剛性低下部を設けたことを特徴とする請求項1から3のいずれかに記載の振動波駆動装置。
- 前記支持部の前記固定部近傍に高剛性部を設けたことを特徴とする請求項1から3のいずれかに記載の振動波駆動装置。
- 弾性体に電気機械エネルギ変換素子を接合して駆動振動を前記弾性体に形成する振動体と、前記振動部に設けた摺動部において加圧接触する接触体とを有し、前記電気機械エネルギ変換素子に交番電圧を印加することによって所定の固有振動モードを駆動モードとする駆動振動と該駆動信号とは異なる他振動が前記振動体に生じ、前記駆動振動によって前記振動体と前記接触体を相対的に駆動する振動波駆動装置において、
前記振動体を他部材に固定するための前記振動体の固定部と前記振動部との間に設けられる支持部は、前記電気機械エネルギ変換素子に所定の駆動周波数帯域内の交番電圧を印加した場合に、前記他振動が固有振動数に達しない形状に形成されていることを特徴とする振動波駆動装置。 - 次数の異なる前記他振動が固有振動数に達する前記交番信号の周波数が前記駆動周波数帯域の上方および下方に存在し、前記次数の異なる他振動の周波数応答ゲインが等しくなる周波数が前記駆動周波数帯域に存在することを特徴とする請求項6記載の振動波駆動装置。
- 円環形状の振動部を少なくとも備える弾性体に電気機械エネルギ変換素子を接合した振動体と、前記振動部に設けた摺動部において加圧接触する接触体とを有し、前記電気機械エネルギ変換素子に所定の駆動周波数帯域の交番電圧を印加することによって、前記振動部の対称軸方向を主とする屈曲振動を駆動モードとする駆動振動と前記振動部が該振動部内の円周上の節円を中心としてねじれるねじりモードが前記振動体に生じ、前記駆動振動によって前記振動体と前記接触体とを相対的に駆動する振動波駆動装置において、
前記振動体を支持する支持部材は、前記電気機械エネルギ変換素子に前記駆動周波数帯域内の交番電圧を印加した場合に、前記ねじりモードが固有振動数に達しないように、前記振動体と同心状に配置された複数の粘性抵抗の低い材料で形成されていることを特徴とする振動波駆動装置。 - 円環形状の振動部を少なくとも備える弾性体に電気機械エネルギ変換素子を接合した振動体と、前記振動部に設けた摺動部において加圧接触する接触体とを有し、 前記電気機械エネルギ変換素子に所定の駆動周波数帯域の交番電圧を印加することによって、前記振動部の対称軸方向を主とする屈曲振動を駆動モードとする駆動振動と前記振動部が該振動部内の円周上の節円を中心としてねじれるねじりモードが前記振動体に生じ、前記駆動振動によって前記振動体と前記接触体とを相対的に駆動する振動波駆動装置において、
前記振動体を支持する支持部材は、前記電気機械エネルギ変換素子に前記駆動周波数帯域内の交番電圧を印加した場合に、前記ねじりモードが固有振動数に達しないように、前記振動部の幅よりも狭い粘性抵抗の低い材料で形成されていることを特徴とする振動波駆動装置。 - 前記ねじりモードの第1次のモードが固有振動数に達する前記交番信号の周波数が前記駆動周波数帯域よりも上方に存在することを特徴とする請求項1に記載の振動波駆動装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001373654A JP3805242B2 (ja) | 2001-12-07 | 2001-12-07 | 振動波駆動装置 |
| US10/307,926 US7245058B2 (en) | 2001-12-07 | 2002-12-03 | Vibration wave driving apparatus, and method of setting shape of support member supporting elastic member forming vibration member of vibration wave driving apparatus |
| CN02153876.XA CN1268053C (zh) | 2001-12-07 | 2002-12-04 | 振动波驱动装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001373654A JP3805242B2 (ja) | 2001-12-07 | 2001-12-07 | 振動波駆動装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2003180092A JP2003180092A (ja) | 2003-06-27 |
| JP2003180092A5 JP2003180092A5 (ja) | 2004-07-08 |
| JP3805242B2 true JP3805242B2 (ja) | 2006-08-02 |
Family
ID=19182331
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001373654A Expired - Fee Related JP3805242B2 (ja) | 2001-12-07 | 2001-12-07 | 振動波駆動装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7245058B2 (ja) |
| JP (1) | JP3805242B2 (ja) |
| CN (1) | CN1268053C (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9188931B2 (en) | 2013-07-04 | 2015-11-17 | Canon Kabushiki Kaisha | Vibration type driving apparatus and image forming apparatus |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7129618B2 (en) * | 2003-03-31 | 2006-10-31 | Canon Kabushiki Kaisha | Control apparatus capable of low-speed driving of vibration type driving apparatus, actuating apparatus using the control apparatus, control method capable of low-speed driving of vibration type driving apparatus, and storage medium storing program including program codes capable of realizing the control method |
| JP4478407B2 (ja) * | 2003-06-30 | 2010-06-09 | キヤノン株式会社 | 制御装置およびプログラム |
| JP4290168B2 (ja) * | 2005-03-31 | 2009-07-01 | キヤノン株式会社 | 振動波駆動装置 |
| JP5137406B2 (ja) * | 2007-01-11 | 2013-02-06 | キヤノン株式会社 | 振動型駆動装置 |
| CN101652661B (zh) * | 2007-04-03 | 2013-02-13 | 佳能株式会社 | 使用微流体设备的送液装置和送液方法 |
| JP5184909B2 (ja) * | 2008-02-13 | 2013-04-17 | キヤノン株式会社 | 揺動体装置及び光偏向装置 |
| US10274553B2 (en) * | 2013-03-15 | 2019-04-30 | Canon U.S.A., Inc. | Needle placement manipulator with attachment for RF-coil |
| US9867667B2 (en) | 2014-02-27 | 2018-01-16 | Canon Usa Inc. | Placement apparatus |
| WO2015171988A1 (en) | 2014-05-09 | 2015-11-12 | Canon U.S.A., Inc. | Positioning apparatus |
| JP6579836B2 (ja) | 2014-07-16 | 2019-09-25 | キヤノン株式会社 | 振動型アクチュエータ及び光学装置 |
| US10285670B2 (en) | 2014-09-12 | 2019-05-14 | Canon U.S.A., Inc. | Needle positioning apparatus |
| US9867673B2 (en) | 2015-07-14 | 2018-01-16 | Canon U.S.A, Inc. | Medical support device |
| US10639065B2 (en) | 2015-07-21 | 2020-05-05 | Canon U.S.A., Inc. | Medical assist device |
| JP2017070115A (ja) | 2015-09-30 | 2017-04-06 | キヤノン株式会社 | 振動型アクチュエータ、振動型アクチュエータの駆動方法、レンズ鏡筒、撮像装置及びステージ装置 |
| JP6866128B2 (ja) | 2015-12-04 | 2021-04-28 | キヤノン株式会社 | 振動型アクチュエータの駆動方法、振動型駆動装置及び機械装置 |
| US10765489B2 (en) | 2016-01-29 | 2020-09-08 | Canon U.S.A., Inc. | Tool placement manipulator |
| JP6948389B2 (ja) | 2016-10-19 | 2021-10-13 | キヤノン ユーエスエイ, インコーポレイテッドCanon U.S.A., Inc | 穿刺器具を位置決めするための配置マニピュレータおよびアタッチメント |
| US11081979B2 (en) | 2017-04-25 | 2021-08-03 | Canon Kabushiki Kaisha | Vibration-type driving apparatus that detects undesired vibrations, control method for the vibration-type driving apparatus, storage medium, robot, pan head for image pickup apparatus, and image forming apparatus |
| JP2018186698A (ja) * | 2017-04-25 | 2018-11-22 | キヤノン株式会社 | 振動型駆動装置、振動型駆動装置の制御方法、プログラム、ロボット、撮像装置の雲台及び画像形成装置 |
Family Cites Families (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US96970A (en) * | 1869-11-16 | Improvement in straw-cutters | ||
| US121869A (en) * | 1871-12-12 | Improvement in tin cans | ||
| US53858A (en) * | 1866-04-10 | Improvement in looms | ||
| US5061882A (en) * | 1987-02-09 | 1991-10-29 | Nikon Corporation | Power supply frequency regulating device for vibration wave driven motor |
| DE69030827T2 (de) * | 1989-02-14 | 1998-01-15 | Canon Kk | Vibrationswellenmotor |
| JP2698412B2 (ja) | 1989-02-14 | 1998-01-19 | キヤノン株式会社 | 振動波装置 |
| US5173623A (en) * | 1989-05-15 | 1992-12-22 | Texas Instruments Incorporated | High performance BiCMOS logic circuits with full output voltage swing up to four predetermined voltage values |
| JPH02303374A (ja) * | 1989-05-18 | 1990-12-17 | Aisin Seiki Co Ltd | 超音波モータ |
| EP0442469B1 (en) * | 1990-02-14 | 1995-07-26 | Nikon Corporation | Driving device for ultrasonic wave motor |
| JP3047025B2 (ja) * | 1990-09-11 | 2000-05-29 | セイコーインスツルメンツ株式会社 | 超音波モータ |
| JP3015090B2 (ja) * | 1990-10-05 | 2000-02-28 | キヤノン株式会社 | 振動波駆動装置 |
| JP2972010B2 (ja) * | 1992-01-08 | 1999-11-08 | キヤノン株式会社 | 振動型アクチュエーター駆動制御装置 |
| JP3287614B2 (ja) * | 1992-10-01 | 2002-06-04 | キヤノン株式会社 | 超音波モータ |
| JPH06178560A (ja) * | 1992-12-03 | 1994-06-24 | Canon Inc | 振動波モータおよびプリンタ装置 |
| JP3107933B2 (ja) * | 1992-12-03 | 2000-11-13 | キヤノン株式会社 | 振動波駆動装置および振動波駆動装置を備えた装置 |
| JPH07115782A (ja) * | 1993-10-13 | 1995-05-02 | Canon Inc | 振動波駆動装置 |
| JPH07143765A (ja) * | 1993-11-12 | 1995-06-02 | Seiko Instr Inc | 超音波モータ及び超音波モータ付き電子機器 |
| US5760529A (en) * | 1995-04-24 | 1998-06-02 | Canon Kabushiki Kaisha | Vibration wave actuator and system using the same |
| US5949178A (en) * | 1995-04-26 | 1999-09-07 | Canon Kabushiki Kaisha | Vibration wave driving apparatus and a vibration member, and manufacturing method of the apparatus and the member |
| JP3437359B2 (ja) * | 1996-01-08 | 2003-08-18 | キヤノン株式会社 | 振動波駆動装置の制御装置 |
| JP3728606B2 (ja) * | 1996-01-31 | 2005-12-21 | 株式会社ニコン | 振動モータ |
| US6054795A (en) * | 1996-04-24 | 2000-04-25 | Canon Kabushiki Kaisha | Driving apparatus for vibration type actuator device |
| JPH1084682A (ja) * | 1996-09-09 | 1998-03-31 | Canon Inc | 振動波駆動装置および振動波駆動装置を有する機器 |
| JPH10178792A (ja) * | 1996-12-20 | 1998-06-30 | Canon Inc | 駆動制御装置およびこれを用いた装置、複写機 |
| US6107723A (en) * | 1996-12-26 | 2000-08-22 | Canon Kabushiki Kaisha | Vibrating type driving device |
| JP3789017B2 (ja) * | 1996-12-27 | 2006-06-21 | キヤノン株式会社 | 位置制御装置 |
| JP3347654B2 (ja) * | 1997-10-29 | 2002-11-20 | キヤノン株式会社 | 駆動装置 |
| US6100622A (en) * | 1997-12-12 | 2000-08-08 | Canon Kabushiki Kaisha | Driving apparatus of vibration type actuator |
| JP3332832B2 (ja) * | 1997-12-12 | 2002-10-07 | キヤノン株式会社 | 振動型アクチュエータ装置 |
| US5949851A (en) * | 1998-05-28 | 1999-09-07 | Mahaffey; Shannon R. | Home weather emergency warning system |
| JP2000184759A (ja) | 1998-12-10 | 2000-06-30 | Canon Inc | 振動型アクチュエ―タ駆動装置 |
| JP4428747B2 (ja) * | 1999-02-22 | 2010-03-10 | キヤノン株式会社 | 振動型アクチュエータ駆動制御装置、駆動制御方法、及び記憶媒体 |
| JP2000261280A (ja) | 1999-03-08 | 2000-09-22 | Tdk Corp | 圧電バルク振動子 |
| JP3226894B2 (ja) | 1999-03-25 | 2001-11-05 | セイコーインスツルメンツ株式会社 | 超音波モータ及び超音波モータ付き電子機器 |
| US6724607B2 (en) | 2000-09-28 | 2004-04-20 | Canon Kabushiki Kaisha | Driving apparatus of vibration type actuator |
| JP2002204585A (ja) | 2000-12-28 | 2002-07-19 | Canon Inc | 振動型アクチュエータの制御装置 |
-
2001
- 2001-12-07 JP JP2001373654A patent/JP3805242B2/ja not_active Expired - Fee Related
-
2002
- 2002-12-03 US US10/307,926 patent/US7245058B2/en not_active Expired - Lifetime
- 2002-12-04 CN CN02153876.XA patent/CN1268053C/zh not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9188931B2 (en) | 2013-07-04 | 2015-11-17 | Canon Kabushiki Kaisha | Vibration type driving apparatus and image forming apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| US7245058B2 (en) | 2007-07-17 |
| US20030107299A1 (en) | 2003-06-12 |
| CN1268053C (zh) | 2006-08-02 |
| JP2003180092A (ja) | 2003-06-27 |
| CN1424814A (zh) | 2003-06-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3805242B2 (ja) | 振動波駆動装置 | |
| JP2003180092A5 (ja) | ||
| US7215063B2 (en) | Vibration element and vibration wave driving apparatus | |
| JP5709413B2 (ja) | 振動型駆動装置 | |
| JP5631018B2 (ja) | 回転型振動波駆動装置 | |
| US8183740B2 (en) | Piezoelectric motor with high torque | |
| US20090121586A1 (en) | Apparatus for transforming inverse piezoelectric effect into rotary motion and method of manufacturing aforementioned apparatus | |
| JP5701032B2 (ja) | 振動型駆動装置 | |
| EP1225682B1 (en) | Vibration wave driving apparatus | |
| JP5791339B2 (ja) | 円環型振動波アクチュエータ | |
| JPH11164575A (ja) | 振動モータ | |
| JP4095282B2 (ja) | 振動波駆動装置 | |
| WO2011016298A1 (ja) | 超音波モータ用ロータ及び超音波モータ | |
| JP2549310B2 (ja) | 超音波モータ | |
| JP2769151B2 (ja) | 超音波モータ | |
| JP2003224987A (ja) | 振動型駆動装置 | |
| JPH04168986A (ja) | 超音波モータ | |
| JP2754625B2 (ja) | 振動アクチュエータ | |
| JP4182666B2 (ja) | 振動波モータの製造工程の変更方法 | |
| JP2004201441A (ja) | 振動型駆動装置 | |
| JP4438152B2 (ja) | 振動アクチュエータ | |
| JP2002142472A (ja) | 振動体、振動波駆動装置および振動波駆動装置を有する装置 | |
| JP3089750B2 (ja) | 超音波モータ | |
| JP3283832B2 (ja) | 超音波モータ | |
| JPH02303372A (ja) | 超音波モータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20041122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20041207 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050207 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060502 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060509 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 3805242 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100519 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100519 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110519 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120519 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120519 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130519 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140519 Year of fee payment: 8 |
|
| LAPS | Cancellation because of no payment of annual fees |