CN107180772B - 芯片贴装装置以及半导体器件的制造方法 - Google Patents
芯片贴装装置以及半导体器件的制造方法 Download PDFInfo
- Publication number
- CN107180772B CN107180772B CN201611028985.4A CN201611028985A CN107180772B CN 107180772 B CN107180772 B CN 107180772B CN 201611028985 A CN201611028985 A CN 201611028985A CN 107180772 B CN107180772 B CN 107180772B
- Authority
- CN
- China
- Prior art keywords
- wafer
- substrate
- robot
- chip
- bare chip
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000004065 semiconductor Substances 0.000 title claims abstract description 18
- 238000000034 method Methods 0.000 title claims abstract description 12
- 238000004519 manufacturing process Methods 0.000 title claims abstract description 7
- 239000000758 substrate Substances 0.000 claims abstract description 88
- 230000007246 mechanism Effects 0.000 claims abstract description 19
- 230000009471 action Effects 0.000 abstract description 4
- 230000032258 transport Effects 0.000 abstract 2
- 235000012431 wafers Nutrition 0.000 description 114
- 230000008569 process Effects 0.000 description 7
- 239000000853 adhesive Substances 0.000 description 6
- 230000001070 adhesive effect Effects 0.000 description 6
- 239000000463 material Substances 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 238000007599 discharging Methods 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 239000010931 gold Substances 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000007747 plating Methods 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 229910000679 solder Inorganic materials 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
Images




















Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
- H01L21/04—Manufacture or treatment of semiconductor devices or of parts thereof the devices having at least one potential-jump barrier or surface barrier, e.g. PN junction, depletion layer or carrier concentration layer
- H01L21/50—Assembly of semiconductor devices using processes or apparatus not provided for in a single one of the subgroups H01L21/06 - H01L21/326, e.g. sealing of a cap to a base of a container
- H01L21/52—Mounting semiconductor bodies in containers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67242—Apparatus for monitoring, sorting or marking
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/673—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere using specially adapted carriers or holders; Fixing the workpieces on such carriers or holders
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
- H01L21/67712—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations the substrate being handled substantially vertically
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
- H01L21/6773—Conveying cassettes, containers or carriers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67742—Mechanical parts of transfer devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68707—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a robot blade, or gripped by a gripper for conveyance
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68714—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a susceptor, stage or support
- H01L21/68721—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a susceptor, stage or support characterised by edge clamping, e.g. clamping ring
Abstract
本发明提供一种芯片贴装装置以及半导体器件的制造方法,解决在将基板沿X方向搬送、将晶片沿Y方向搬送、将晶片环保持架在X、Y方向的规定的动作范围内驱动的芯片贴装装置中需要搬送和驱动的空间从而无法使装置小型化的课题。芯片贴装装置具备用于收纳对晶片进行保持的晶片环的晶片盒、用于收纳基板的基板盒、用于固定晶片环的晶片台、为了将从晶片拾取的裸芯片进行贴装而载置基板的贴装台、以及具有多自由度多关节机构且用于搬送晶片环、基板和裸芯片的机械手。
Description
技术领域
本发明涉及芯片贴装装置(die bonding device),例如能够适用于具有多自由度多关节机械手(robot)的芯片贴装装置。
背景技术
在基板上安装半导体芯片的芯片贴装机等安装装置设有具有进给机构的导轨,该进给机构将上述基板沿X方向步进输送并将该基板在规定的安装位置进行定位。在通过该导轨而被搬送并定位的基板上,通过安装工具安装上述半导体芯片。半导体芯片保持于晶片环(wafer ring)。即,在晶片环上保持有贴附于树脂制片材的半导体晶片,该半导体晶片被分割为方块状而成为上述半导体芯片。上述晶片环收纳于晶片盒,通过卡盘将晶片环从该晶片盒取出并沿Y方向搬送并供给载置于晶片环保持架上。晶片环保持架在X、Y方向的规定的动作范围内驱动,将保持于晶片环的半导体芯片中的、要拾取的半导体芯片定位于拾取位置。定位于拾取位置的半导体芯片通过顶起销而被顶起。被顶起的半导体芯片由上述安装工具吸附并安装于上述基板。(日本特开2008-53531号公报(专利文献1))
现有技术文献
专利文献
专利文献1:日本特开2008-53531号公报
发明内容
在专利文献1所记载那样的安装装置中,基板沿X方向搬送,晶片沿Y方向搬送,晶片环保持架在X、Y方向的规定的动作范围内驱动,因此需要搬送和驱动的空间,无法使装置小型化。
本发明的课题在于提供一种能够使装置小型化的芯片贴装装置。
其他课题和新颖的特征能够从本说明书的记载以及添加附图得以明确。
若要简单地说明本发明中的代表性的方案的概要则如下所述。
即,芯片贴装装置具有多自由度多关节机构,且具有用于搬送对晶片进行保持的晶片环、基板和裸芯片(die)的机械手。
发明效果
根据上述芯片贴装装置,能够使装置小型化。
附图说明
图1是用于说明实施例的芯片贴装装置的结构的立体图。
图2是用于说明实施例的芯片贴装装置的结构的俯视图。
图3是用于说明实施例的晶片台(wafer stage)的结构的剖视图。
图4是用于说明实施例的多功能机械手的立体图。
图5是用于说明实施例的晶片操作工具(wafer handing tool)的立体图
图6是在实施例的多功能机械手上安装了晶片操作工具的情况下的立体图。
图7是用于说明实施例的基板操作工具的立体图。
图8是在实施例的多功能机械手上安装了基板操作工具的情况下的立体图。
图9是用于说明实施例的裸芯片操作工具的立体图。
图10是在实施例的多功能机械手上安装了裸芯片操作工具的情况下的立体图。
图11是用于说明实施例的顶起用机械手的立体图。
图12A是用于说明实施例的芯片贴装装置的动作的流程图。
图12B是用于说明实施例的芯片贴装装置的动作的流程图。
图13是用于说明实施例的芯片贴装装置的晶片搬送时的动作的立体图。
图14是用于说明实施例的芯片贴装装置的基板搬送时的动作的立体图。
图15是用于说明实施例的芯片贴装装置的拾取及贴装时的动作的立体图。
图16是用于说明实施例的芯片贴装装置的拾取动作的立体图。
图17是用于说明实施例的倒装芯片(flip chip)用裸芯片操作工具的立体图。
图18是用于说明实施例的倒装芯片用裸芯片操作工具的立体图。
图19是用于说明实施例的倒装芯片用裸芯片操作工具的立体图。
图20是用于说明实施例的倒装芯片用裸芯片操作工具的立体图。附图标记说明
1:芯片贴装装置
10:晶片台
11:晶片
20:贴装台(bonding stage)
21:基板
30:晶片盒
40、40L、40H:基板盒(magazine)
50:多功能机械手
51:固定部
52:可动部
53:工具连接部
54:力觉传感器
55:视觉摄像机(vision camera)
60:顶起用机械手
70:晶片操作工具
80:基板操作工具
90:裸芯片操作工具
具体实施方式
在半导体器件的制造工序的一部分中具有将半导体芯片(以下简称为裸芯片)搭载于布线基板或引线框等(以下简称为基板)并对封装(package)进行组装的工序,在对封装进行组装的工序的一部分中具有从半导体晶片(以下简称为晶片)分割裸芯片的工序、和将分割出的裸芯片搭载于基板上的贴装工序。在贴装工序中使用的制造装置是芯片贴装机或倒装芯片贴装机等芯片贴装装置。
芯片贴装机是以焊锡、镀金、树脂为接合材料将裸芯片贴装到基板或已被贴装(搭载并粘结)的裸芯片上的装置。在将裸芯片贴装到例如基板的表面上的贴装装置中,反复进行如下动作(作业):使用被称为筒夹(collet)的吸附嘴从晶片吸附裸芯片来进行拾取,将其搬送到基板上,付与按压力,并且通过对接合材料进行加热来进行贴装。筒夹是具有吸附孔、并通过吸引空气来吸附保持裸芯片的保持件,具有与裸芯片相同程度的大小。
实施方式的芯片贴装装置在正面侧配置用于收纳晶片环的晶片盒以及用于收纳基板的基板盒,在背面侧固定地配置晶片台,在晶片盒与晶片台之间配置贴装台。晶片、基板以及裸芯片由一个机械手搬送,其水平方向的搬送方向是相同方向。由此,能够使装置小型化。
以下,使用附图来说明实施例。但是,在以下的说明中,存在对同一结构要素标注同一附图标记并省略重复说明的情况。此外,对于附图,存在为了使说明更加明确而与实际的形态相比示意性地表示各部分的宽度、厚度、形状等的情况,但只不过是一例,并不限定本发明的解释。
实施例
使用图1来说明实施例的芯片贴装装置。图1是表示实施例的芯片贴装装置的结构的立体图。在图1中示出后述的多功能机械手的多个状态。
实施例的芯片贴装装置1具有正面的宽度为W、纵深为D、高度为H的装置主体2。装置主体2具有底板基座3、顶部基座4、和配置于它们之间的中间基座5。在底板基座3之上固定有顶起用机械手60,在顶部基座4之下固定有多功能机械手50。在中间基座5之上,在背面侧固定有晶片台10,在与晶片台10相邻的正面侧固定有贴装台20。在晶片台10之下的中间基座5上开设有孔。与贴装台20相比在正面侧且与中间基座5相比在上方配置有晶片盒30,该晶片盒30用于收纳对晶片11进行保持的晶片环14,在该晶片盒30的上方配置有用于收纳基板21的基板盒40。例如在晶片11的直径最大为300mm(12英寸)、基板21的大小最大为310x310mm的情况下,装置主体2的大小优选为W=450mm、H=1600mm、D=1500mm。
接下来,使用图3来说明晶片台的详细结构。图3是表示实施例的晶片台的结构的剖视图。在晶片11的背面贴合有粘片膜(DAF)18,进一步在粘片膜18的背面侧贴合有切割带(dicing tape)16。另外,切割带16的边缘贴合于晶片环14,并夹入于扩展部(expander)15而被固定。扩展部15由汽缸(cylinder)等构成,倒L字状部分能够旋转,且倒L字状部分能够上下移动。即,晶片台10具备:扩展部15,其将晶片环14按下;和支承环17,其将保持于晶片环14且粘结有多个裸芯片D(晶片11)的切割带16水平地定位。这样,随着裸芯片D的薄型化,芯片贴装用的粘结剂从液状更换为膜状,从而成为在晶片11与切割带16之间贴合有被称为粘片膜18的膜状粘结材料的构造。在具有粘片膜18的晶片11中,切割是对晶片11和粘片膜18进行的。此外,也可以是将切割带16和粘片膜18一体化的带。
接下来,使用图4来说明多功能机械手50的结构。图4是表示实施例的多功能机械手的结构的立体图。实施例的多功能机械手50是垂直型多自由度多关节机械手。多功能机械手50具备固定部51、可动部52、工具更换部53、力觉传感器54和视觉摄像机(visioncamera)55。工具连接部53是凸型(公型)的,与后述的各种工具的凹型(母型)的连接部连接。作为各种工具,具有晶片操作工具70、基板操作工具80、裸芯片操作工具90等。各种工具的收纳部配置于不会在多功能机械手50的动作范围内对晶片搬送、基板搬送及拾取和放置(place)造成妨碍的位置。
接下来,使用图5、图6来说明晶片操作工具70。图5是表示实施例的晶片操作工具的结构的立体图。图6是表示在实施例的多功能机械手上安装了晶片操作工具的状态的立体图。
如图5所示,晶片操作工具70具有晶片装夹部71和连接部72。晶片装夹部71握持晶片环14。连接部72为凹型(母型)且与多功能机械手50的工具连接部53卡合。如图6所示,安装于多功能机械手50前端的晶片操作工具70握持晶片环14,并使其相对于晶片盒30进出。
接下来,使用图7、图8来说明基板操作工具80。图7是表示实施例的基板操作工具的结构的立体图。图8是在实施例的多功能机械手上安装了基板操作工具的状态的立体图。
如图7所示,基板操作工具80具备搭载部81、支承部82和连接部83。搭载部81与基板31为同等程度的大小且为平板状,是载置基板31的部分。支承部82为圆柱状且与搭载部81和连接部83连接。连接部83为凹型(母型)且与多功能机械手50的工具连接部53卡合。如图8所示,安装于多功能机械手50前端的基板操作工具80载置基板21,将其置于贴装台20或将其从贴装台20取下。
接下来,使用图9、图10来说明裸芯片操作工具90。图9是表示实施例的裸芯片操作工具的结构的立体图。图10是在实施例的多功能机械手上安装了裸芯片操作工具的状态的立体图。
如图9所示,裸芯片操作工具90具备头部91和连接部92。在头部91的前端安装有筒夹93,用于吸附裸芯片D。连接部92为凹型(母型)且与多功能机械手50的工具连接部53卡合。如图10所示,裸芯片操作工具90安装于多功能机械手50的前端。
接下来,使用图11来说明顶起用机械手60的结构。图11是表示实施例的顶起用机械手的结构的立体图。实施例的顶起用机械手60是垂直型多自由度多关节机械手。顶起用机械手60具有固定部61、可动部62和顶起工具部63。顶起工具部63能够根据品种或产品而更换。
接下来,使用图12A、图12B、图13~图16来说明芯片贴装装置1的动作。图12A、12B是用于说明实施例的芯片贴装装置的动作的流程图。图13是用于说明实施例的芯片贴装装置的晶片搬送时的动作的立体图。图14是用于说明实施例的芯片贴装装置的基板搬送时的动作的立体图。图15是用于说明实施例的芯片贴装装置的拾取及贴装时的动作的立体图。图16是用于说明实施例的芯片贴装装置的拾取动作的立体图。
芯片贴装装置1具有未图示的控制装置,控制装置具有未图示的CPU(CentralProcessor Unit)、存储控制程序的存储器和存储数据的存储器、以及控制总线等,控制多功能机械手50、顶起用机械手60等构成芯片贴装装置1的各要素。
芯片贴装装置1的动作分为初始化(步骤S1)、晶片搬送(步骤S2)、基板搬送(步骤S3)、以及拾取和放置(步骤S3)。
步骤S1:控制装置将多功能机械手50、顶起用机械手60等构成芯片贴装装置1的各要素初始化(initialize)。
步骤S2的晶片搬送进行下述动作。
步骤S21:控制装置在多功能机械手50上安装晶片操作工具70(更换晶片用工具)。
步骤S22:控制装置使用多功能机械手50的视觉摄像机55确认有无晶片盒30(确认有无晶片盒)。
步骤S23:控制装置使用多功能机械手50的视觉摄像机55确认有无晶片11(晶片环14)(确认有无晶片)。
步骤S24:控制装置使用多功能机械手50的晶片操作工具70,如图13所示,将保持晶片11的晶片环14从晶片盒30取出并搬送到晶片台10上(搬送晶片)。
步骤S25:控制装置将晶片环14向扩展部15按压,将保持在晶片环14上的切割带16拉长(扩展晶片)。由此,裸芯片D彼此的间隔扩大,防止各裸芯片D彼此的干涉和接触,各个裸芯片分离而容易被顶起。
步骤S3的基板搬送进行下述动作。
步骤S31:控制装置从多功能机械手50取下晶片操作工具70并安装基板操作工具80(更换基板用工具)。
步骤S32:控制装置使用多功能机械手50的视觉摄像机55确认有无基板盒40(确认有无基板盒)。
步骤S33:控制装置使用多功能机械手50的视觉摄像机55确认有无基板21(确认有无基板)。
步骤S34:控制装置使用多功能机械手50的基板操作工具80,如图14所示,将基板21从基板盒40L取出并搬送至贴装台20(搬送基板)。
步骤S4的拾取和放置进行下述动作。
步骤S41:控制装置从多功能机械手50取下基板操作工具80并安装裸芯片操作工具90(更换裸芯片用工具)。
步骤S42:控制装置修正裸芯片操作工具90的位置(修正裸芯片用工具位置)。
步骤S43:控制装置使用多功能机械手50的视觉摄像机55识别晶片11的对准标记(alignment)(识别晶片对准标记)。
步骤S44:控制装置使用多功能机械手50的视觉摄像机55识别基板21的对准标记(识别基板对准标记)。
步骤S45:控制装置如图15、图16所示那样使顶起用机械手60的顶起工具部63从裸芯片D下方顶起,并使安装于多功能机械手50的裸芯片操作工具90上的筒夹93从裸芯片D上方下降,拾取裸芯片D。此时,也可以对拾取和顶起动作设置倾斜度。多功能机械手50及顶起用机械手60能够进行XYZ轴/αβθ轴这6自由度的动作,筒夹93能够实现如用手抬起裸芯片D那样的灵活的动作。也可以使顶起具部63具有能够吸附保持切割带16的功能,不仅进行顶起动作,还进行如用手下拉那样的动作。通过使筒夹93和顶起工具部63双方动作,能够实现复杂且可靠的拾取。
步骤S46:控制装置对基于在步骤S43中识别的晶片对准标记、在步骤S44中识别的基板对准标记以及力觉传感器54而拾取的裸芯片D的位置进行修正。
步骤S47:控制装置使用位于所拾取的裸芯片D下方的视觉摄像机(未图示)检查裸芯片D的外观(检查裸芯片外观)。
步骤S48:控制装置将所拾取的裸芯片D贴装于基板21之上或已经贴装的裸芯片之上。
步骤S49:控制装置判断是否在贴装台20上不存在要贴装的基板。在判断结果为“是”的情况下转移到步骤S4B,在判断结果为“否”的情况下转移到步骤S4A。
步骤S4A:控制装置判断是否在晶片11上不存在要拾取的裸芯片。在判断结果为“是”的情况下转移到步骤S4C,在判断结果为“否”的情况下转移到步骤S45。
步骤S4B:控制装置更换基板。首先,控制装置从多功能机械手50取下裸芯片操作工具90并安装基板操作工具80。接着,控制装置使用多功能机械手50的基板操作工具80,从贴装台20取下基板21,并将其搬送至与贴装前所安装的基板盒40L不同的基板盒40H。接着,控制装置使用多功能机械手50的基板操作工具80,将下一基板从基板盒40L取出并搬送至贴装台20。之后,返回至步骤S41。
步骤S4C:控制装置更换晶片。首先,控制装置从多功能机械手50取下裸芯片操作工具90并安装晶片操作工具70。接着,控制装置使用多功能机械手50的晶片操作工具70,从晶片台10取出晶片环14并将其搬送至晶片盒30。接着,控制装置使用多功能机械手50的晶片操作工具70,将下一晶片环从晶片盒30取出并搬送至晶片台10。控制装置通过扩展部15按压晶片环14,将保持于晶片环14的切割带16拉长。之后,返回到步骤S41。
接下来,使用图17~图20来说明将芯片贴装装置1用作倒装芯片贴装机的情况下的裸芯片操作工具。图17是表示实施例的倒装芯片用裸芯片操作工具的第1状态的立体图。图18是表示实施例的倒装芯片用裸芯片操作工具的第2状态的立体图。图19是表示实施例的倒装芯片用裸芯片操作工具的第3状态的立体图。图20是表示实施例的倒装芯片用裸芯片操作工具的第4状态的立体图。
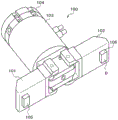
如图17所示,倒装芯片贴装机用裸芯片操作工具100具备拾取头部101、倒装头部102、基座部103和连接部104。在拾取头部101及倒装头部102上分别具有用于吸附裸芯片D的筒夹105、106。拾取头部101及倒装头部102是可动的。
图17是拾取头部101及倒装头部102打开的状态(第1状态)。在第1状态下,拾取头部101通过筒夹105拾取裸芯片D。
图18是拾取头部101打开的状态、且是倒装头部102关闭的状态(第2状态)。也可以是拾取头部101关闭的状态、且是倒装头部102打开的状态。第2状态是第1状态接下来的状态。
图19是拾取头部101及倒装头部102关闭的状态(第3状态)。在第3状态下,通过倒装头部102的筒夹106吸附裸芯片D,解除通过拾取头部101的筒夹105进行的裸芯片D的吸附。第3状态是第2状态接下来的状态。
图20是拾取头部101及倒装头部102打开的状态(第4状态)。在第4状态下,裸芯片D反转而被从拾取头部101交付到倒装头部102,倒装头部102将通过筒夹106吸附的裸芯片D放置(贴装)于基板等。第4状态是第3状态接下来的状态。
实施例的芯片贴装装置发挥以下的效果。
由于对机械手使用多自由度多关节机构,因此可动区域大且能够进行使姿势变化的动作,从而能够将其兼用于晶片的出料、基板盒的收纳等多种动作。由此,能够减少机构部。另外,能够实现将晶片盒/基板盒、贴装台、晶片台沿一个方向排列配置这样的简单的布局结构,从而能够实现装置的轻量小型化。
另外,由于仅从装置的正面进行晶片(晶片盒)及基板(基板盒)的取出收入,且装置的宽度变窄,因此通过将装置并列配置多个并使多个装置并行动作,能够抑制装置所占面积的增加,提高生产能力。
另外,由于使用多自由度多关节机构,因此能够与拾取点和放置点分别配合地进行搬送,从而调整变得容易。
另外,对驱动拾取头及顶起机构的机构使用多自由度多关节机构,通过使对拾取和顶起进行驱动的机构协调动作,能够对拾取/顶起动作设置倾斜度而使其动作。在将贴合于切割带的裸芯片剥离的情况下,能够一边使相对角度发生角度变化一边进行动作,成为在正交坐标系的机构中无法实现的动作,因此能够改善拾取性能。
另外,能够通过替换裸芯片操作工具而将芯片贴装机变更为倒装芯片贴装机。
以上,基于实施例说明了由本申请发明人完成的发明,但本发明不限定于上述实施例,当然能够进行各种变更。
在实施例中说明了将基板盒配置于晶片盒之上且将贴装台、晶片台沿一个方向配置的情况,但也可以将基板盒配置于晶片盒旁边。也可以在晶片盒或基板盒的上下方向上配置各种工具的收纳部。另外,也可以以组合工具(cluster tool)的方式将多功能机械手配置于中心并在其周边配置晶片盒、基板盒、贴装台、晶片台。
在实施例中,通过一个多功能机械手来搬送晶片环、基板、裸芯片,但也可以通过多个机械手进行搬送。
在实施例中说明了使用垂直型多自由度多关节机构的情况,但多自由度多关节机构也可以是水平型或平行连接型(parallel link type)。
在实施例中说明了芯片贴装装置,但通过将托盘放置于贴装台上,能够将其也用作裸芯片分选机(die sorter)。
Claims (9)
1.一种芯片贴装装置,其特征在于,具备:
装置主体;
晶片盒,其用于收纳对晶片进行保持的晶片环;
基板盒,其用于收纳基板;
晶片台,其用于固定所述晶片环;
贴装台,其为了对从所述晶片拾取的裸芯片进行贴装而载置基板;
第1机械手,其具有多自由度多关节机构,用于搬送所述晶片环、所述基板和所述裸芯片;以及
第2机械手,其配置于所述晶片台的下方,且与所述第1机械手协作来拾取所述裸芯片,
所述第1机械手的所述多自由度多关节机构是XYZ轴及αβθ轴的6自由度多关节机构,
所述第2机械手具有XYZ轴及αβθ轴的6自由度多关节机构。
2.如权利要求1所述的芯片贴装装置,其特征在于,
所述第1机械手是固定于所述装置主体的顶部的垂直型多自由度多关节机械手。
3.如权利要求1所述的芯片贴装装置,其特征在于,
所述第1机械手在其前端具备视觉摄像机。
4.如权利要求1所述的芯片贴装装置,其特征在于,
所述晶片台具备:扩展部,其将所述晶片环按下;和支承环,其将保持于所述晶片环且粘结有所述晶片的切割带水平地定位。
5.如权利要求1所述的芯片贴装装置,其特征在于,
所述第2机械手在其前端具备将所述裸芯片顶起的工具。
6.如权利要求5所述的芯片贴装装置,其特征在于,
所述工具能够更换。
7.如权利要求5所述的芯片贴装装置,其特征在于,
所述第2机械手是固定在所述装置主体的底板上的垂直型多自由度多关节机械手。
8.一种半导体器件的制造方法,其特征在于,具有以下工序:
(a)准备芯片贴装装置的工序,该芯片贴装装置具备装置主体、用于收纳对粘贴于晶片的切割带进行保持的晶片环的晶片盒、用于收纳基板的第1基板盒及第2基板盒、用于固定所述晶片环的晶片台、为了对从所述晶片拾取的裸芯片进行贴装而载置基板的贴装台、具有XYZ轴及αβθ轴的6自由度多关节机构的第1机械手、以及具有XYZ轴及αβθ轴的6自由度多关节机构的第2机械手;
(b)通过所述第1机械手将所述晶片环从所述晶片盒搬送至所述晶片台的工序;
(c)通过所述第1机械手将所述基板从所述第1基板盒搬送至所述贴装台的工序;
(d)所述第1机械手和所述第2机械手协作而拾取所述裸芯片的工序;
(e)通过所述第1机械手搬送所拾取的所述裸芯片并贴装于所述贴装台上的基板上的工序;以及
(f)通过所述第1机械手将贴装有所述裸芯片的基板搬送至所述第2基板盒的工序。
9.如权利要求8所述的半导体器件的制造方法,其特征在于,
在所述(d)工序中,对所述第1机械手前端的晶片操作工具设置规定的角度而使其与所述裸芯片接触,对所述第2机械手的前端部设置规定的角度而使其与所述切割带接触,拾取所述裸芯片。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110446716.4A CN113192867B (zh) | 2016-03-11 | 2016-11-18 | 芯片贴装装置以及半导体器件的制造方法 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016-048988 | 2016-03-11 | ||
| JP2016048988A JP6705668B2 (ja) | 2016-03-11 | 2016-03-11 | ダイボンディング装置および半導体装置の製造方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110446716.4A Division CN113192867B (zh) | 2016-03-11 | 2016-11-18 | 芯片贴装装置以及半导体器件的制造方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107180772A CN107180772A (zh) | 2017-09-19 |
| CN107180772B true CN107180772B (zh) | 2021-04-30 |
Family
ID=59830188
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110446716.4A Active CN113192867B (zh) | 2016-03-11 | 2016-11-18 | 芯片贴装装置以及半导体器件的制造方法 |
| CN201611028985.4A Active CN107180772B (zh) | 2016-03-11 | 2016-11-18 | 芯片贴装装置以及半导体器件的制造方法 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110446716.4A Active CN113192867B (zh) | 2016-03-11 | 2016-11-18 | 芯片贴装装置以及半导体器件的制造方法 |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP6705668B2 (zh) |
| KR (2) | KR101835232B1 (zh) |
| CN (2) | CN113192867B (zh) |
| TW (1) | TWI615905B (zh) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7018338B2 (ja) * | 2018-03-19 | 2022-02-10 | ファスフォードテクノロジ株式会社 | ダイボンディング装置および半導体装置の製造方法 |
| JP7102271B2 (ja) * | 2018-07-17 | 2022-07-19 | ファスフォードテクノロジ株式会社 | 半導体製造装置および半導体装置の製造方法 |
| KR102113118B1 (ko) * | 2018-11-21 | 2020-05-20 | 제너셈(주) | 패키지 언로딩 장치 |
| KR20200065175A (ko) | 2018-11-29 | 2020-06-09 | 삼성디스플레이 주식회사 | 기판 이송 시스템 및 기판 이송 방법 |
| JP7146352B2 (ja) * | 2018-12-10 | 2022-10-04 | 株式会社ディスコ | 試験装置 |
| JP7184620B2 (ja) * | 2018-12-11 | 2022-12-06 | 株式会社ディスコ | 切削装置 |
| KR20200119971A (ko) | 2019-04-11 | 2020-10-21 | 주식회사 지와이엘테크놀로지 | 반도체 본딩 장치 및 그 방법 |
| TWI734434B (zh) * | 2019-04-11 | 2021-07-21 | 日商新川股份有限公司 | 接合裝置 |
| JP6880158B1 (ja) * | 2019-11-29 | 2021-06-02 | キヤノンマシナリー株式会社 | ワーク移載装置、ワーク移載方法、移載体の製造方法、半導体装置の製造方法、及びダイボンダ |
| KR102434404B1 (ko) * | 2022-04-05 | 2022-08-18 | 홍문복 | 자동차 클러스터 조립을 위한 옵티컬 본딩 공정 설비 및 이를 이용한 본딩 방법 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TW200929423A (en) * | 2007-08-15 | 2009-07-01 | Applied Materials Inc | Pulsed laser anneal system architecture |
| KR20100055809A (ko) * | 2008-11-18 | 2010-05-27 | 세메스 주식회사 | 기판 처리 장치 |
| TW201312681A (zh) * | 2011-06-03 | 2013-03-16 | Orion Systems Integration Pte Ltd | 用於半導體晶片取放及鍵合之方法及系統 |
| TW201521138A (zh) * | 2013-08-09 | 2015-06-01 | Hitachi High Tech Instr Co Ltd | 筒夾及固晶裝置 |
Family Cites Families (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3030400B2 (ja) * | 1994-02-24 | 2000-04-10 | 株式会社三井ハイテック | 自動ダイボンディング方法 |
| JPH08306764A (ja) * | 1995-05-02 | 1996-11-22 | Tokyo Electron Ltd | 半導体部品の実装方法およびその装置 |
| JPH10277981A (ja) * | 1997-04-07 | 1998-10-20 | Nittetsu Semiconductor Kk | ロボットハンド |
| JPH10335410A (ja) * | 1997-05-29 | 1998-12-18 | Sony Corp | ウエハ搬送装置及びウエハアライメント方法 |
| JP3938436B2 (ja) * | 1998-06-05 | 2007-06-27 | 大日本スクリーン製造株式会社 | 基板移載装置およびそれを用いた基板処理装置 |
| KR100278603B1 (ko) * | 1998-09-30 | 2001-01-15 | 윤종용 | 미세간극 볼 그리드 어레이 패키지용 다이본딩 설비 및 다이본딩 방법 |
| JP4234300B2 (ja) * | 2000-05-09 | 2009-03-04 | ヤマハ発動機株式会社 | チップ移送装置 |
| JP2002076094A (ja) * | 2000-08-31 | 2002-03-15 | Daikin Ind Ltd | 基板搬送装置 |
| JP5051948B2 (ja) * | 2001-05-30 | 2012-10-17 | 株式会社ダイヘン | カセット搬送方法及びカセット搬送システム |
| KR100407568B1 (ko) * | 2001-06-01 | 2003-12-01 | 삼성전자주식회사 | 장치설치영역 내에 지지대를 갖는 반도체 제조 장치 |
| CN1608308A (zh) * | 2001-11-13 | 2005-04-20 | Fsi国际公司 | 微型电子基片的自动化加工用的减少占地的工具 |
| JP2004055697A (ja) * | 2002-07-17 | 2004-02-19 | Ace:Kk | 基板の移載、搬送装置及び移載方法 |
| TW586996B (en) * | 2003-07-04 | 2004-05-11 | Advanced Semiconductor Eng | Wafer transport robot arm |
| JP4096850B2 (ja) * | 2003-09-18 | 2008-06-04 | 松下電器産業株式会社 | 物体搬送装置および物体搬送方法 |
| JP2006073834A (ja) * | 2004-09-02 | 2006-03-16 | Dainippon Screen Mfg Co Ltd | 基板搬送装置およびそれを用いた基板処理装置 |
| JP4602750B2 (ja) * | 2004-12-13 | 2010-12-22 | 東京エレクトロン株式会社 | 処理装置および処理方法 |
| JP4767641B2 (ja) * | 2005-09-27 | 2011-09-07 | 大日本スクリーン製造株式会社 | 基板処理装置および基板搬送方法 |
| JP4890873B2 (ja) * | 2006-02-06 | 2012-03-07 | リンテック株式会社 | シート貼付装置 |
| JP2006191144A (ja) * | 2006-03-13 | 2006-07-20 | Toshiba Corp | ピックアップ装置及びピックアップ方法 |
| JP4585496B2 (ja) | 2006-08-25 | 2010-11-24 | 芝浦メカトロニクス株式会社 | 半導体チップの実装装置 |
| US9050634B2 (en) * | 2007-02-15 | 2015-06-09 | SCREEN Holdings Co., Ltd. | Substrate processing apparatus |
| CN101540291A (zh) * | 2009-03-23 | 2009-09-23 | 常州新区爱立德电子有限公司 | 半导体芯片自动分选机 |
| KR20120123920A (ko) * | 2011-05-02 | 2012-11-12 | 나노에프에이 주식회사 | 웨이퍼 이송 장치를 실시간 모니터링하는 비전 시스템을 구비하는 반도체 제조 설비 |
| JP2013049113A (ja) * | 2011-08-31 | 2013-03-14 | Yaskawa Electric Corp | ロボットのアーム構造およびロボット |
| KR20130026805A (ko) | 2011-09-06 | 2013-03-14 | 삼성전자주식회사 | 반도체 패키지의 와이어 본딩 시스템 |
| JP5941701B2 (ja) * | 2012-02-23 | 2016-06-29 | ファスフォードテクノロジ株式会社 | ダイボンダ |
| KR20140003281A (ko) * | 2012-06-29 | 2014-01-09 | 한미반도체 주식회사 | 반도체칩 본딩 시스템 |
| JP6111065B2 (ja) * | 2012-12-28 | 2017-04-05 | 川崎重工業株式会社 | 自動教示システム及び教示方法 |
| JPWO2014157134A1 (ja) * | 2013-03-28 | 2017-02-16 | 東レエンジニアリング株式会社 | 実装方法および実装装置 |
| JP6118620B2 (ja) * | 2013-04-03 | 2017-04-19 | ヤマハ発動機株式会社 | 部品実装装置 |
| CN203491228U (zh) * | 2013-10-12 | 2014-03-19 | 四川蓝彩电子科技有限公司 | 晶片装配系统 |
| KR101483987B1 (ko) * | 2014-06-16 | 2015-01-20 | 주식회사 로보스타 | 4개의 로봇 암의 가변 핸드를 구비한 반송 로봇 |
-
2016
- 2016-03-11 JP JP2016048988A patent/JP6705668B2/ja active Active
- 2016-11-04 TW TW105135963A patent/TWI615905B/zh active
- 2016-11-18 KR KR1020160153978A patent/KR101835232B1/ko active IP Right Grant
- 2016-11-18 CN CN202110446716.4A patent/CN113192867B/zh active Active
- 2016-11-18 CN CN201611028985.4A patent/CN107180772B/zh active Active
-
2018
- 2018-02-26 KR KR1020180022825A patent/KR101990242B1/ko active IP Right Grant
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TW200929423A (en) * | 2007-08-15 | 2009-07-01 | Applied Materials Inc | Pulsed laser anneal system architecture |
| KR20100055809A (ko) * | 2008-11-18 | 2010-05-27 | 세메스 주식회사 | 기판 처리 장치 |
| TW201312681A (zh) * | 2011-06-03 | 2013-03-16 | Orion Systems Integration Pte Ltd | 用於半導體晶片取放及鍵合之方法及系統 |
| TW201521138A (zh) * | 2013-08-09 | 2015-06-01 | Hitachi High Tech Instr Co Ltd | 筒夾及固晶裝置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113192867B (zh) | 2024-01-23 |
| TWI615905B (zh) | 2018-02-21 |
| JP6705668B2 (ja) | 2020-06-03 |
| KR101835232B1 (ko) | 2018-03-06 |
| KR20170106175A (ko) | 2017-09-20 |
| TW201732961A (zh) | 2017-09-16 |
| CN107180772A (zh) | 2017-09-19 |
| KR20180028057A (ko) | 2018-03-15 |
| KR101990242B1 (ko) | 2019-09-24 |
| CN113192867A (zh) | 2021-07-30 |
| JP2017163121A (ja) | 2017-09-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107180772B (zh) | 芯片贴装装置以及半导体器件的制造方法 | |
| CN108987305B (zh) | 半导体制造装置以及半导体器件的制造方法 | |
| CN107622955B (zh) | 半导体制造装置及半导体器件的制造方法 | |
| CN108346585B (zh) | 半导体制造装置及半导体器件的制造方法 | |
| JP6086763B2 (ja) | コレットクリーニング方法及びそれを用いたダイボンダ | |
| CN107492510B (zh) | 半导体制造装置及半导体器件的制造方法 | |
| US8857486B2 (en) | Flip arm module for a bonding apparatus incorporating changeable collet tools | |
| WO2010032427A1 (ja) | 部品実装装置及び部品実装方法 | |
| CN109524313B (zh) | 半导体制造装置、半导体器件的制造方法及筒夹 | |
| CN104347435A (zh) | 吸附筒夹和芯片接合器 | |
| JP6941513B2 (ja) | 半導体製造装置および半導体装置の製造方法 | |
| JP2008010869A (ja) | 半導体チップフリップアセンブリー及びこれを利用した半導体チップボンディング装置 | |
| JP6717630B2 (ja) | 電子部品の実装装置 | |
| JP3861710B2 (ja) | 電子部品供給装置および電子部品実装装置 | |
| KR20210144881A (ko) | 본딩 장치 | |
| JP2001320195A (ja) | 複合実装機 | |
| JP2001319938A (ja) | チップ移送装置 | |
| JP4909249B2 (ja) | 移載装置 | |
| CN112530834B (zh) | 芯片贴装装置、剥离单元、筒夹及半导体器件的制造方法 | |
| JP4001106B2 (ja) | 電子部品ピックアップ装置および電子部品ピックアップ方法 | |
| JP2020074483A (ja) | 電子部品の実装装置 | |
| JP2022183724A (ja) | ピックアップ方法、及び、ピックアップ装置 | |
| JP3982367B2 (ja) | ボンディング装置 | |
| JPH11297718A (ja) | ダイピックアップ方法およびそれを用いた半導体製造装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |