WO2017134865A1 - ヘッドアップディスプレイ装置 - Google Patents
ヘッドアップディスプレイ装置 Download PDFInfo
- Publication number
- WO2017134865A1 WO2017134865A1 PCT/JP2016/081124 JP2016081124W WO2017134865A1 WO 2017134865 A1 WO2017134865 A1 WO 2017134865A1 JP 2016081124 W JP2016081124 W JP 2016081124W WO 2017134865 A1 WO2017134865 A1 WO 2017134865A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- display
- vehicle
- mirror
- display device
- head
- Prior art date
Links
- 230000007246 mechanism Effects 0.000 claims abstract description 22
- 239000004973 liquid crystal related substance Substances 0.000 claims description 31
- 238000000034 method Methods 0.000 description 60
- 230000003287 optical effect Effects 0.000 description 52
- 230000008569 process Effects 0.000 description 46
- 238000009792 diffusion process Methods 0.000 description 23
- 238000010586 diagram Methods 0.000 description 21
- 238000012937 correction Methods 0.000 description 17
- 238000012545 processing Methods 0.000 description 17
- 238000004891 communication Methods 0.000 description 14
- 230000006870 function Effects 0.000 description 12
- 230000001133 acceleration Effects 0.000 description 9
- 230000008859 change Effects 0.000 description 9
- 238000005286 illumination Methods 0.000 description 7
- 230000005540 biological transmission Effects 0.000 description 6
- 238000013459 approach Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 210000003128 head Anatomy 0.000 description 3
- 230000000007 visual effect Effects 0.000 description 3
- 239000003086 colorant Substances 0.000 description 2
- 230000005611 electricity Effects 0.000 description 2
- 230000004927 fusion Effects 0.000 description 2
- 239000011159 matrix material Substances 0.000 description 2
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 1
- 208000003464 asthenopia Diseases 0.000 description 1
- 230000003190 augmentative effect Effects 0.000 description 1
- 230000006399 behavior Effects 0.000 description 1
- 230000004397 blinking Effects 0.000 description 1
- 230000008014 freezing Effects 0.000 description 1
- 238000007710 freezing Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 238000010191 image analysis Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 206010025482 malaise Diseases 0.000 description 1
- QSHDDOUJBYECFT-UHFFFAOYSA-N mercury Chemical compound [Hg] QSHDDOUJBYECFT-UHFFFAOYSA-N 0.000 description 1
- 229910052753 mercury Inorganic materials 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 238000012876 topography Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 229910052724 xenon Inorganic materials 0.000 description 1
- FHNFHKCVQCLJFQ-UHFFFAOYSA-N xenon atom Chemical compound [Xe] FHNFHKCVQCLJFQ-UHFFFAOYSA-N 0.000 description 1
Images



































Classifications
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G3/00—Control arrangements or circuits, of interest only in connection with visual indicators other than cathode-ray tubes
- G09G3/001—Control arrangements or circuits, of interest only in connection with visual indicators other than cathode-ray tubes using specific devices not provided for in groups G09G3/02 - G09G3/36, e.g. using an intermediate record carrier such as a film slide; Projection systems; Display of non-alphanumerical information, solely or in combination with alphanumerical information, e.g. digital display on projected diapositive as background
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0101—Head-up displays characterised by optical features
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/21—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays
- B60K35/23—Head-up displays [HUD]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/80—Arrangements for controlling instruments
- B60K35/81—Arrangements for controlling instruments for controlling displays
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3626—Details of the output of route guidance instructions
- G01C21/365—Guidance using head up displays or projectors, e.g. virtual vehicles or arrows projected on the windscreen or on the road itself
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0149—Head-up displays characterised by mechanical features
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B30/00—Optical systems or apparatus for producing three-dimensional [3D] effects, e.g. stereoscopic images
- G02B30/50—Optical systems or apparatus for producing three-dimensional [3D] effects, e.g. stereoscopic images the image being built up from image elements distributed over a 3D volume, e.g. voxels
- G02B30/52—Optical systems or apparatus for producing three-dimensional [3D] effects, e.g. stereoscopic images the image being built up from image elements distributed over a 3D volume, e.g. voxels the 3D volume being constructed from a stack or sequence of 2D planes, e.g. depth sampling systems
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G3/00—Control arrangements or circuits, of interest only in connection with visual indicators other than cathode-ray tubes
- G09G3/001—Control arrangements or circuits, of interest only in connection with visual indicators other than cathode-ray tubes using specific devices not provided for in groups G09G3/02 - G09G3/36, e.g. using an intermediate record carrier such as a film slide; Projection systems; Display of non-alphanumerical information, solely or in combination with alphanumerical information, e.g. digital display on projected diapositive as background
- G09G3/002—Control arrangements or circuits, of interest only in connection with visual indicators other than cathode-ray tubes using specific devices not provided for in groups G09G3/02 - G09G3/36, e.g. using an intermediate record carrier such as a film slide; Projection systems; Display of non-alphanumerical information, solely or in combination with alphanumerical information, e.g. digital display on projected diapositive as background to project the image of a two-dimensional display, such as an array of light emitting or modulating elements or a CRT
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N9/00—Details of colour television systems
- H04N9/12—Picture reproducers
- H04N9/31—Projection devices for colour picture display, e.g. using electronic spatial light modulators [ESLM]
- H04N9/3179—Video signal processing therefor
- H04N9/3185—Geometric adjustment, e.g. keystone or convergence
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N9/00—Details of colour television systems
- H04N9/12—Picture reproducers
- H04N9/31—Projection devices for colour picture display, e.g. using electronic spatial light modulators [ESLM]
- H04N9/3191—Testing thereof
- H04N9/3194—Testing thereof including sensor feedback
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/20—Optical features of instruments
- B60K2360/23—Optical features of instruments using reflectors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/20—Optical features of instruments
- B60K2360/33—Illumination features
- B60K2360/334—Projection means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/20—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of display used
- B60R2300/205—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of display used using a head-up display
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/30—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing
- B60R2300/307—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing virtually distinguishing relevant parts of a scene from the background of the scene
- B60R2300/308—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing virtually distinguishing relevant parts of a scene from the background of the scene by overlaying the real scene, e.g. through a head-up display on the windscreen
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0101—Head-up displays characterised by optical features
- G02B2027/0123—Head-up displays characterised by optical features comprising devices increasing the field of view
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0101—Head-up displays characterised by optical features
- G02B2027/014—Head-up displays characterised by optical features comprising information/image processing systems
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0149—Head-up displays characterised by mechanical features
- G02B2027/0154—Head-up displays characterised by mechanical features with movable elements
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0179—Display position adjusting means not related to the information to be displayed
- G02B2027/0187—Display position adjusting means not related to the information to be displayed slaved to motion of at least a part of the body of the user, e.g. head, eye
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/64—Imaging systems using optical elements for stabilisation of the lateral and angular position of the image
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G2320/00—Control of display operating conditions
- G09G2320/06—Adjustment of display parameters
- G09G2320/0626—Adjustment of display parameters for control of overall brightness
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G2340/00—Aspects of display data processing
- G09G2340/04—Changes in size, position or resolution of an image
- G09G2340/0464—Positioning
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G2340/00—Aspects of display data processing
- G09G2340/04—Changes in size, position or resolution of an image
- G09G2340/0464—Positioning
- G09G2340/0471—Vertical positioning
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G2380/00—Specific applications
- G09G2380/10—Automotive applications
Definitions
- the present invention relates to a technology for a head-up display device, and more particularly, to a technology effective when applied to a head-up display device using AR (Augmented Reality).
- AR Augmented Reality
- HUD head-up display
- In-vehicle display devices including HUDs may cause the vehicle to vibrate or tilt depending on the driving situation, which may cause problems with the visibility of the displayed video or display appropriate content. .
- Patent Document 1 acquires a rotation component generated in a vehicle body as an inclination of the vehicle body, Based on this, it is described that the image is three-dimensionally corrected for rotation, and the position and inclination for displaying the rotation-corrected image are determined and projected.
- Patent Document 2 describes, when displaying the distance scale on the HUD, from the map data of the navigation device, the travel point information where the host vehicle is currently traveling, and the host vehicle Information on the planned travel point where the vehicle will travel, and based on this information, obtain the inclination angle of the road on which the vehicle travels, and use the correction coefficient according to the inclination angle to display the distance scale from the ground. It is described that the image is corrected and displayed.
- Patent Document 3 describes the display position of the generated image according to the detected driving situation such as right / left turn, acceleration / deceleration, and the like when left turn is detected. It is described that control is performed such as shifting to the right direction when a right turn is detected and shifting to the right direction.
- Patent Document 4 describes that the display position of video information is moved in a direction in which the driver's field of view is secured according to the vehicle state.
- JP 2013-237320 A JP 2007-55365 A JP 2006-7867 A JP2015-202842A
- HUD is to project a video on a windshield and to make the driver recognize the video as a virtual image outside the vehicle.
- a HUD that realizes a so-called AR function that makes it possible to show the driver information about the object or the like.
- AR-HUD Even in such an AR-HUD, it is necessary to make adjustments for maintaining the visibility and appropriateness of the display image in accordance with the traveling state of the vehicle.
- Patent Document 4 it is possible to move the display area itself in the HUD according to the vehicle state.
- the technique described in Patent Document 4 is intended to ensure the driver's field of view even when a change occurs in the vehicle state, so that the display area in the HUD does not become an obstacle to the driver. It is moved to a position.
- a virtual image may not be superimposed on an actual landscape included in the driver's field of view, and the AR function is not effective.
- an object of the present invention is to provide a head-up display device that can display a virtual image so as to be appropriately superimposed on an actual landscape in accordance with the traveling state of the vehicle.
- a head-up display device projects a video on a windshield of a vehicle, and displays a virtual image superimposed on a landscape in front of the vehicle for a driver.
- a vehicle information acquisition unit that acquires various types of vehicle information that can be detected by the vehicle, and a control unit that controls display of the video based on the vehicle information acquired by the vehicle information acquisition unit.
- An image display device that forms the image based on an instruction from the control unit, a mirror that reflects the image formed by the image display device and projects the image onto the windshield, and an instruction from the control unit
- a mirror driving unit that changes the angle of the mirror based on the display distance adjustment mechanism that adjusts a display distance of the virtual image to the driver. It is.
- the controller controls the angle of the mirror via the mirror driving unit so that the driver can display the virtual image superimposed on the landscape based on the vehicle information. adjust.
- the representative embodiment of the present invention it is possible to display the AR-HUD so as to appropriately superimpose the virtual image on the actual landscape according to the traveling state of the vehicle.
- (A), (b) is the figure which showed the outline
- (A), (b) is the figure which showed an example of the form of the navigation display in other one Embodiment of this invention.
- (A), (b) is the figure which showed an example of the form of the navigation display in other one Embodiment of this invention.
- (A), (b) is the figure which showed an example of the form of the navigation display in other one Embodiment of this invention. It is the figure which showed an example of the form of the navigation display in other one Embodiment of this invention.
- (A), (b) is the figure which showed an example of the form of the navigation display in other one Embodiment of this invention.
- (A), (b) is the figure which showed an example of the form of the navigation display in other one Embodiment of this invention.
- (A), (b) is the figure which showed an example of the form of the navigation display in other one Embodiment of this invention.
- (A), (b) is the figure which showed an example of the form of the navigation display in other one Embodiment of this invention.
- (A), (b), (c), (d) is the figure which showed an example of the form of the navigation display in other one Embodiment of this invention.
- (A), (b), (c), (d) is the figure which showed an example of the form of the navigation display in other one Embodiment of this invention.
- (A), (b), (c), (d) is the figure which showed an example of the form of the navigation display in other one Embodiment of this invention.
- (A), (b), (c) is a figure explaining operation
- FIG. 2 is a diagram showing an outline of an example of an operation concept of the head-up display device according to the embodiment of the present invention.
- an image displayed on the image display device 30 such as a projector or an LCD (Liquid Crystal Display) is converted into a mirror 51 or a mirror 52 (for example, a free-form surface mirror or an optical axis asymmetric shape). And is projected onto the windshield 3 of the vehicle 2.
- the driver 5 views the image projected as a virtual image in front of the transparent windshield 3 by viewing the image projected on the windshield 3.
- the display position of the virtual image seen by the driver 5 is adjusted in the vertical direction by adjusting the position of the image projected onto the windshield 3 by adjusting the angle of the mirror 52.
- the display distance can be adjusted, such as displaying a virtual image near (for example, 2 to 3 m away) or distant (for example, 30 to 40 m away). It is.
- the AR function is realized by adjusting the display position and the display distance so that the virtual image is superimposed on the scenery outside the vehicle (roads, buildings, people, etc.).
- FIG. 1 is a functional block diagram showing an outline of an overall configuration example of a head-up display device according to an embodiment of the present invention.
- the AR-HUD 1 mounted on the vehicle 2 includes, for example, a vehicle information acquisition unit 10, a control unit 20, a video display device 30, a display distance adjustment mechanism 40, a mirror driving unit 50, a mirror 52, and a speaker 60.
- the shape of the vehicle 2 is displayed like a passenger car.
- the shape of the vehicle 2 is not particularly limited, and can be applied as appropriate to general vehicles.
- the vehicle information acquisition unit 10 includes information acquisition devices such as various sensors, which will be described later, installed in each part of the vehicle 2, detects various events occurring in the vehicle 2, and relates to the driving situation at predetermined intervals.
- the vehicle information 4 is acquired and output by detecting and acquiring values of various parameters.
- the vehicle information 4 includes, for example, speed information, gear information, steering wheel steering angle information, lamp lighting information, external light information, distance information, infrared information, engine ON / OFF information, and camera video information of the vehicle 2 as illustrated. (Inside / outside the vehicle), acceleration gyro information, GPS (Global Positioning System) information, navigation information, vehicle-to-vehicle communication information, road-to-vehicle communication information, and the like may be included.
- the control unit 20 has a function of controlling the operation of the AR-HUD 1, and is implemented by, for example, a CPU (Central Processing Unit) and software executed thereby. It may be implemented by hardware such as a microcomputer or FPGA (Field Programmable Gate Array). As shown in FIG. 2, the control unit 20 drives the video display device 30 to form an image to be displayed as a virtual image based on the vehicle information 4 acquired from the vehicle information acquisition unit 10, and this is mirrored. The light is projected onto the windshield 3 by being appropriately reflected by 52 or the like. Then, control such as adjusting the display position of the virtual image display area or adjusting the display distance of the virtual image is performed by a method described later.
- a CPU Central Processing Unit
- FPGA Field Programmable Gate Array
- the video display device 30 is a device configured by, for example, a projector or an LCD, and forms a video for displaying a virtual image based on an instruction from the control unit 20 and projects or displays the video.
- the display distance adjustment mechanism 40 is a mechanism for adjusting the distance from the driver 5 of the virtual image to be displayed based on an instruction from the control unit 20. For example, various display distance adjustment methods as described later are used. One or more of them are mounted.
- the mirror driving unit 50 adjusts the angle of the mirror 52 based on an instruction from the control unit 20 and adjusts the position of the virtual image display area in the vertical direction. The adjustment of the position of the virtual image display area will be described later.
- the speaker 60 performs audio output related to the AR-HUD1. For example, voice guidance of the navigation system, voice output when notifying the driver 5 by the AR function, etc. can be performed.
- FIG. 3 is a diagram showing an outline of an example of a hardware configuration related to acquisition of the vehicle information 4 in the head-up display device of the present embodiment.
- the vehicle information 4 is acquired by an information acquisition device such as various sensors connected to the ECU 21 under the control of an ECU (Electronic Control Unit) 21, for example.
- ECU Electronic Control Unit
- a vehicle speed sensor 101 for example, a vehicle speed sensor 101, a shift position sensor 102, a steering wheel steering angle sensor 103, a headlight sensor 104, an illuminance sensor 105, a chromaticity sensor 106, a distance measuring sensor 107, an infrared sensor 108, an engine start sensor 109, acceleration sensor 110, gyro sensor 111, temperature sensor 112, road-to-vehicle communication wireless receiver 113, vehicle-to-vehicle communication wireless receiver 114, camera (inside the vehicle) 115, camera (outside the vehicle) 116, GPS receiver 117, and
- Each device includes a VICS (Vehicle Information and Communication System: a road traffic information communication system, registered trademark (hereinafter the same)) receiver 118 and the like. It is not always necessary to include all these devices, and other types of devices may be included.
- the vehicle information 4 that can be acquired by the provided device can be used as appropriate.
- the vehicle speed sensor 101 acquires speed information of the vehicle 2.
- the shift position sensor 102 acquires current gear information of the vehicle 2.
- the steering wheel angle sensor 103 acquires steering wheel angle information.
- the headlight sensor 104 acquires lamp lighting information related to ON / OFF of the headlight.
- the illuminance sensor 105 and the chromaticity sensor 106 acquire external light information.
- the distance measuring sensor 107 acquires distance information between the vehicle 2 and an external object.
- the infrared sensor 108 acquires infrared information related to the presence / absence and distance of an object at a short distance of the vehicle 2.
- the engine start sensor 109 detects engine ON / OFF information.
- the acceleration sensor 110 and the gyro sensor 111 acquire acceleration gyro information including acceleration and angular velocity as information on the posture and behavior of the vehicle 2.
- the temperature sensor 112 acquires temperature information inside and outside the vehicle.
- the road-to-vehicle communication wireless receiver 113 and the vehicle-to-vehicle communication wireless receiver 114 are respectively road-to-vehicle communication information received by road-to-vehicle communication between the vehicle 2 and roads, signs, signals, etc.
- the vehicle-to-vehicle communication information received by the vehicle-to-vehicle communication with another vehicle is acquired.
- the camera (inside the vehicle) 115 and the camera (outside the vehicle) 116 respectively capture the moving image of the situation inside and outside the vehicle and acquire camera video information (inside / outside the vehicle).
- the camera (inside the vehicle) 115 captures, for example, the posture of the driver 5, the position of the eyes, the movement, and the like. By analyzing the obtained moving image, for example, it is possible to grasp the fatigue status of the driver 5, the position of the line of sight, and the like.
- the camera (outside the vehicle) 116 captures a situation around the vehicle 2 such as the front or rear. By analyzing the obtained video, for example, it is possible to grasp the presence or absence of moving objects such as other vehicles and people around the building, topography, road surface conditions (rain, snow, freezing, unevenness, etc.) It is.
- the GPS receiver 117 and the VICS receiver 118 obtain GPS information obtained by receiving the GPS signal and VICS information obtained by receiving the VICS signal, respectively. It may be implemented as a part of a car navigation system that acquires and uses these pieces of information.
- FIG. 4 is a functional block diagram showing details of a configuration example of the head-up display device of the present embodiment.
- the example of FIG. 4 shows a case where the video display device 30 is a projector, and the video display device 30 includes, for example, each unit such as a light source 31, an illumination optical system 32, and a display element 33.
- the light source 31 is a member that generates illumination light for projection.
- a high-pressure mercury lamp, a xenon lamp, an LED (Light-Emitting-Diode) light source, a laser light source, or the like can be used.
- the illumination optical system 32 is an optical system that collects the illumination light generated by the light source 31 and irradiates the display element 33 with more uniform illumination light.
- the display element 33 is an element that generates an image to be projected.
- a transmissive liquid crystal panel, a reflective liquid crystal panel, a DMD (Digital Micromirror Device) (registered trademark) panel, or the like can be used.
- control unit 20 includes an ECU 21, an audio output unit 22, a nonvolatile memory 23, a memory 24, a light source adjustment unit 25, a distortion correction unit 26, a display element drive unit 27, a display distance adjustment unit 28, and a mirror adjustment. Each part such as the part 29 is included.
- the ECU 21 acquires the vehicle information 4 via the vehicle information acquisition unit 10, and records, stores, and reads the acquired information in the nonvolatile memory 23 and the memory 24 as necessary. To do.
- the nonvolatile memory 23 may store setting information such as setting values and parameters for various controls. Further, the ECU 21 generates video data relating to a virtual image to be displayed as the AR-HUD 1 by executing a dedicated program.
- the audio output unit 22 outputs audio information via the speaker 60 as necessary.
- the light source adjustment unit 25 adjusts the light emission amount of the light source 31 of the video display device 30. When there are a plurality of light sources 31, they may be controlled individually.
- the distortion correction unit 26 corrects the video distortion caused by the curvature of the windshield 3 by image processing.
- the display element drive unit 27 sends a drive signal corresponding to the video data corrected by the distortion correction unit 26 to the display element 33 to generate an image to be projected.
- the display distance adjustment unit 28 drives the display distance adjustment mechanism 40 to adjust the display distance of the image projected from the image display device 30.
- the mirror adjustment unit 29 changes the angle of the mirror 52 via the mirror driving unit 50 to move the virtual image display area up and down. The position adjustment of the virtual image display area will also be described later.
- FIG. 5 is a diagram showing details of an example of a configuration related to display distance adjustment in the head-up display device of the present embodiment.
- the display distance adjustment unit 28 of the control unit 20 further includes, as individual units controlled by the ECU 21, for example, a functional liquid crystal film ON / OFF control unit 281, a lens movable unit 282, and a dimming mirror ON / OFF control unit 283. , A diffusion plate movable portion 284, an optical filter movable portion 285, and the like.
- the display distance adjustment mechanism 40 further includes a functional liquid crystal film 401, a lens movable mechanism 402, a light control mirror 403, a diffusion plate movable mechanism 404, and an optical.
- a filter movable mechanism 405 and the like are included. A method for adjusting the display distance of the virtual image by these units will be described later.
- the AR-HUD 1 does not need to include all of these units and devices, but may include various units necessary for implementing the virtual image display distance adjustment method described later. Good.
- FIG. 6 is a flowchart showing an outline of an example of an initial operation of the head-up display device of the present embodiment.
- the AR-HUD 1 starts with the vehicle information acquisition unit 10 based on an instruction from the control unit 20.
- vehicle information is acquired (S02).
- the control unit 20 calculates a suitable brightness level based on external light information acquired by the illuminance sensor 105, the chromaticity sensor 106, and the like in the vehicle information 4 (S03), and the light source adjustment unit 25 calculates the light source 31. Is set so that the calculated brightness level is obtained (S04). For example, when the outside light is bright, the brightness level is set high, and when the outside light is dark, the brightness level is set low.
- the ECU 21 determines and generates a video (for example, an initial image) to be displayed as a virtual image (S05), and performs a process of correcting the distortion by the distortion correction unit 26 for the generated video (S06).
- the display element 33 is driven and controlled by the element driving unit 27 to form a projected image (S07).
- video is projected on the windshield 3, and the driver
- the ECU 21 or the display distance adjustment unit 28 calculates and determines the display distance of the virtual image (S08), and the display distance adjustment unit 28 drives the display distance adjustment mechanism 40 to display the image projected from the video display device 30.
- the distance is controlled (S09).
- the HUD-ON signal is output.
- the control unit 20 determines whether or not this signal has been received (S11). . If not received, the HUD-ON signal is further waited for a predetermined time (S12), and the HUD-ON signal waiting process (S12) is repeated until it is determined in step S11 that the HUD-ON signal has been received. If it is determined in step S11 that the HUD-ON signal has been received, normal operation of AR-HUD1 described later is started (S13), and a series of initial operations are terminated.
- FIG. 7 is a flowchart showing an outline of an example of normal operation of the head-up display device of the present embodiment. Also in the normal operation, the basic processing flow is substantially the same as the initial operation shown in FIG. First, the AR-HUD 1 acquires vehicle information by the vehicle information acquisition unit 10 based on an instruction from the control unit 20 (S21). And the control part 20 performs a brightness level adjustment process based on the external light information acquired by the illumination intensity sensor 105, the chromaticity sensor 106, etc. among the vehicle information 4 (S22).
- FIG. 8 is a flowchart showing an outline of an example of brightness level adjustment processing of the head-up display device of the present embodiment.
- a suitable brightness level is calculated based on the acquired outside light information (S221). Then, by comparing with the currently set brightness level, it is determined whether or not the brightness level needs to be changed (S222). If no change is necessary, the brightness level adjustment process is terminated. On the other hand, when the change is necessary, the light source adjustment unit 25 controls the light emission amount of the light source 31 to set the brightness level after the change (S223), and the brightness level adjustment process is ended. .
- step S222 even when there is a difference between the preferred brightness level calculated in step S221 and the currently set brightness level, the brightness level is only when the difference is equal to or greater than a predetermined threshold. It may be determined that the change is necessary.
- the video displayed as a virtual image is changed as necessary from the current one based on the latest vehicle information 4 acquired in step S ⁇ b> 21, and the changed video is determined and generated.
- the pattern which changes a display content based on the vehicle information 4 can have many things according to the content of the acquired vehicle information 4, those combinations, etc. For example, when the speed information changes, the value of the speed display that is displayed at all times is changed, the guidance arrow graphic is displayed / erased based on the navigation information, and the arrow shape and display position are changed. There may be various patterns, such as when performing.
- adjustment / correction processing is performed to maintain visibility, appropriateness of display contents, and the like according to the traveling state of the vehicle 2.
- the mirror adjustment process is performed to change the angle of the mirror 52 via the mirror driving unit 50 and move the virtual image display area up and down (S24).
- a vibration correction process for correcting the display position of the image in the display area with respect to the vibration of the vehicle 2 is performed (S25). Detailed contents of the adjustment / correction processing in steps S24 and S25 will be described later.
- the distortion correction unit 26 performs distortion correction processing on the adjusted / corrected image (S26), and then the display element driving unit 27 drives and controls the display element 33 to form a projected image ( S27). Then, the display distance adjustment unit 28 calculates and determines the display distance of the virtual image (S28), and the display distance adjustment unit 28 drives the display distance adjustment mechanism 40 to display the image projected from the image display device 30. The distance is controlled (S29).
- a HUD-OFF signal is output to the AR-HUD 1. It is determined whether or not this signal has been received (S30). If the HUD-OFF signal has not been received, the process returns to step S21, and a series of normal operations are repeated until the HUD-OFF signal is received. If it is determined that the HUD-OFF signal has been received, a series of normal operations is terminated.
- FIG. 9 is a diagram showing an outline of an example in which the position of the virtual image display area is adjusted up and down in the head-up display device of the present embodiment.
- the upper stage schematically shows the state of the slope of the road on which the vehicle 2 is traveling and the state of the visual field of the driver 5 as viewed from the side.
- the situation in front of the vehicle viewed by the driver 5 and the situation of the position of the virtual image display area 6 (rectangular line in a broken line) displayed superimposed thereon are schematically shown. Show.
- the center figure shows a case where the road gradient (upward direction) of the current location of the vehicle 2 is greater than the road gradient (upward direction) of the front road, that is, when the vehicle is traveling on a downhill road ahead.
- the field of view is for viewing the road ahead in relation to the height of the field of view of the driver 5 (solid line frame in the figure) based on the gradient at the position of the vehicle 2.
- Must be moved downward (dotted line frame in the figure).
- the display position of the virtual image display area 6 remains the basic display position (rectangular rectangle), the virtual image is superimposed on the scenery in front of the vehicle by the AR function. Therefore, the display area 6 itself needs to be moved downward in order to superimpose and display.
- the right side diagram shows a case where the road gradient (upward direction) of the current location of the vehicle 2 is smaller than the road gradient (upward direction) of the front road, that is, the road ahead is traveling on an uphill road. ing.
- the field of view is for viewing the road ahead in relation to the height of the field of view of the driver 5 (solid line frame in the figure) based on the gradient at the position of the vehicle 2.
- Must be moved upward (dotted line frame in the figure).
- the display position of the virtual image display area 6 remains the basic display position (rectangular rectangle)
- the virtual image is superimposed on the scenery in front of the vehicle by the AR function. Therefore, in order to display the images in a superimposed manner, the display area 6 itself needs to be moved upward.
- the situation where it is necessary to move the vertical position of the virtual image display area 6 according to the traveling situation is as follows: the gradient of the current position and the gradient of the road ahead as shown in the example of FIG. It is not limited to the case where there is a certain amount of difference between the two.
- the driver 5's line of sight generally looks farther than usual, and the height of the field of view moves upward. Therefore, for example, in order to superimpose a virtual image on the scenery outside the vehicle including other vehicles and the like existing further forward than in the normal time, it may be necessary to move the display area 6 upward.
- the driver's 5 eye height position itself changes due to changes in the posture or posture of the driver 5 while the vehicle 2 is traveling, and thus the height of the visual field moves in the vertical direction. is there.
- the mirror driving unit 50 controls the angle of the mirror 52 in accordance with the traveling state of the vehicle 2, and the vertical position of the virtual image display area Are adjusted as shown in the example of FIG.
- FIG. 10 is a flowchart showing an outline of an example of the mirror adjustment process in step S24 of FIG.
- the mirror adjustment process is started, first, the current angle of the mirror 52 is acquired (S241), and further, based on the vehicle information 4, the angle of the mirror 52 is adjusted (that is, the display position of the virtual image display area is adjusted).
- the current value of the related parameter is acquired (S242).
- the types of parameters required may vary depending on the conditions under which the display position of the display area is adjusted. For example, in the example illustrated in FIG. 9, a value indicating a difference (relative gradient) between the gradient of the current position of the vehicle 2 and the gradient of the road ahead is acquired as the related parameter value.
- the gradient of the current position can be grasped from the tilt information of the vehicle 2 obtained from the acceleration gyro information. It is also possible to grasp the slope of the road ahead by analyzing camera video information outside the vehicle. It is also possible to obtain the current position and the gradient of the road ahead based on three-dimensional road / terrain information obtained from the navigation information.
- the target angle of the mirror 52 is calculated on the basis of predetermined criteria / conditions (S243). Which logic is used to calculate the target angle based on which parameter may differ depending on the conditions under which the display position of the display area is adjusted. For example, in the example shown in FIG. 9, when the absolute value of the relative gradient between the current location and the road ahead is greater than or equal to a predetermined threshold, the target angle of the mirror 52 is determined according to the sign of the relative gradient. To do.
- the predetermined threshold may be, for example, 1 / x (x is a predetermined value) of the vertical FOV (Field Of View: viewing angle) of the virtual image display area.
- the target angle of the mirror 52 is calculated based on the current parameter value acquired in step S242, but in the near future based on information on the current parameter value and history of past values.
- the target angle may be calculated based on the prediction result.
- the tendency of the value transition may be analyzed based on the past history of the parameter value, and the near future parameter value may be predicted based on the tendency. It is also possible to predict the surrounding situation of the vehicle 2 in the near future by analyzing the camera image information ahead of the vehicle, or to grasp the road situation ahead of the vehicle 2 based on the navigation information.
- step S241 it is determined whether or not there is a difference between the angle of the current mirror 52 acquired in step S241 and the angle of the target mirror 52 acquired in step S243 (S244).
- the determination for example, it may be determined that there is a difference when the difference is equal to or greater than a predetermined threshold, and it is determined that there is no difference when the difference is equal to or less than the threshold. Further, it may be determined that there is a difference only when the state with the difference continues for a certain time or more. Thereby, for example, an event that the inclination of the vehicle 2 changes temporarily or instantaneously, such as when the vehicle 2 rides on a step such as a curb, can be excluded from the adjustment target of the mirror 52.
- step S244 If it is determined in step S244 that there is no angle difference, the mirror adjustment process is terminated as it is. That is, the angle of the mirror 52 is not adjusted, and the current angle is maintained.
- the mirror 52 is rotated in the designated direction so as to be the target angle (S245). Specifically, a mirror adjustment signal for rotating the mirror 52 is output to the mirror driving unit 50. Then, it is determined whether or not the mirror 52 has reached the target angle (S246). If not, the process returns to step S245 to continue the rotation of the mirror 52. That is, the output of the mirror adjustment signal to the mirror driving unit 50 is continued.
- the rotation of the mirror 52 is stopped (S247). That is, the output of the mirror adjustment signal to the mirror driving unit 50 is stopped. Then, a series of mirror adjustment processing ends.
- FIG. 11 is a flowchart showing an outline of an example of the vibration correction process in step S25 of FIG.
- the vibration correction process is started, first, information on the vibration amount of the vehicle 2 is acquired based on the vehicle information 4 (S251). For example, it is possible to grasp the vibration amount (the amount of short-term vertical movement in the vehicle 2) based on acceleration gyro information, camera image information outside the vehicle, and the like.
- the vibration information is acquired based on the current vehicle information 4. For example, the road surface condition around the vehicle 2 in the near future by analyzing the camera image information on the front outside the vehicle. And the amount of vibration of the vehicle 2 in the near future may be predicted based on this.
- the vibration correction process is terminated as it is because the vibration is minute. That is, the display image associated with the vibration is not corrected.
- the display shift amount of the video in the display area is calculated (S253). For example, based on the ratio between the actual height of the vehicle 2 and the height of the virtual image display area, the display shift amount of the video in the display area is calculated from the vibration amount of the vehicle 2. Then, based on the calculated display shift amount, the display position of the video in the display area is offset up and down (S254), and the series of vibration correction processing is ended.
- the display distance adjustment unit 28 of the control unit 20 drives the display distance adjustment mechanism 40 to adjust the display distance of the video projected from the video display device 30.
- the adjustment method of the display distance of a virtual image by each part of the display distance adjustment part 28 and the display distance adjustment mechanism 40 shown in FIG. 5 is demonstrated.
- FIG. 12 is a diagram showing an outline of an example of display distance adjustment using the functional liquid crystal film 401 in the head-up display device of the present embodiment.
- a plurality of functional liquid crystal films 401 are used as a diffusion plate (diffuser) 41a.
- a diffusion plate (diffuser) 41a As shown to Fig.12 (a) and (b), by changing the location made into a white state for every area of each functional liquid crystal film 401, a focal distance is changed for every area, and the display distance of a virtual image (Distance between driver's 5 eye position and virtual image display position) is changed.
- a virtual image Distance between driver's 5 eye position and virtual image display position
- FIG. 13 is a diagram showing an outline of a configuration example of the diffusion plate 41a made of the functional liquid crystal film 401.
- the functional liquid crystal film 401 is a film that can control a transmission state and a white state by electricity.
- the white state portion of the functional liquid crystal film 401 functions as a diffusion plate, and the image projected by the projector 30a forms an image in this white state portion.
- control is performed so that the plurality of functional liquid crystal films 401 are individually in a white state for each of a plurality of areas.
- the display position of the virtual image based on the image projected from the projector 30a is determined in accordance with the distance between the white portion of each functional liquid crystal film 401 and the lens 42a.
- a plurality of functional liquid crystal films 401 are arranged so that the distance from the lens 42a is different, and the image projected from the projector 30a is displayed for each area by the functional liquid crystal film ON / OFF control unit 281 shown in FIG.
- the display distance of a virtual image can be changed for every area by making any one of the functional liquid crystal films 401 into a white state.
- the display distance of the corresponding virtual image can be made the shortest.
- the target area for example, the uppermost part
- only the functional liquid crystal film 401 disposed at the position closest to the lens 42a is set in a white state, and the others are By setting the transmission state, the display distance of the corresponding virtual image can be made the shortest.
- the target area for example, the uppermost part
- only the functional liquid crystal film 401 disposed at the farthest position from the lens 42a is set in the white state, and the other is set in the transmissive state.
- the display distance of the corresponding virtual image can be made the longest.
- FIG. 14 is a diagram showing an outline of an example of display distance adjustment using a plurality of mirrors in the head-up display device of the present embodiment.
- a plurality of mirrors 51a are arranged between the LCD 30b and the lens 42a as shown in the figure, and the image from the LCD 30b is reflected by the mirror 51a different for each area and is incident on the lens 42a.
- the distance from the LCD 30b to the lens 42a is different for each area, and the display distance of the virtual image can be changed accordingly.
- the image is displayed on the LCD 30b in an area reflected by the mirror 51a (the farthest from the lens 42a) arranged at the farthest position from the LCD 30b.
- the display distance of the virtual image can be the longest.
- the display distance of the corresponding virtual image can be made the shortest.
- the number of mirrors 51a is not limited to three as illustrated, and can be appropriately configured according to the number of areas.
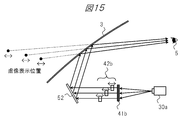
- FIG. 15 is a diagram showing an outline of an example of display distance adjustment using a movable lens in the head-up display device of the present embodiment.
- the image projected from the projector 30a is imaged by a diffusion plate (diffuser) 41b and then incident on the mirror 52 via a movable lens 42b provided in a plurality of areas.
- each movable lens 42b can be individually moved along the optical axis direction by the lens movable portion 282 and the lens movable mechanism 402 shown in FIG.
- the display position of the virtual image based on the image projected from the projector 30a is determined according to the distance between the diffusion plate 41b and each movable lens 42b. Therefore, by moving the movable lens 42b, the focal distance can be changed for each area, and the display distance of the virtual image can be changed.
- the display distance of the corresponding virtual image can be reduced by moving the movable lens 42b to a position close to the diffusion plate 41b as in the uppermost area.
- the display distance of the corresponding virtual image can be increased by moving the movable lens 42b to a position far from the diffusion plate 41b as in the lowermost area.
- the number of movable lenses 42b is not limited to three as illustrated, and can be appropriately configured according to the number of areas.
- FIG. 16 is a diagram schematically showing an example of display distance adjustment using the light control mirror 51b in the head-up display device of the present embodiment.
- the dimming mirror 51b is configured by arranging a plurality of dimming mirrors 403 between the LCD 30b and the lens 42a so as to form a matrix when viewed from the cross-sectional direction as illustrated. Then, as shown in FIGS. 16A and 16B, the distance from the LCD 30b to the lens 42a varies from area to area by changing the location of the light control mirror 403 in the mirror state. The display distance of the virtual image can be changed.
- FIG. 17 is a diagram showing an outline of a configuration example of the light control mirror 403.
- the light control mirror 403 is a member such as a film, a sheet, or glass that can control a transmission state and a mirror state by electricity.
- the dimming mirror 403 in the transmissive state transmits the image from the LCD 30b, and only the dimming mirror 403 in the mirror state reflects the image in the direction of the lens 42a.
- dimming is performed so that only one dimming mirror 403 is in a mirror state for each row and each column (each area) for a plurality of dimming mirrors 403 arranged in a matrix when viewed from the cross-sectional direction. It is controlled by the mirror ON / OFF control unit 283.
- only the light control mirror 403 in the lowermost row is set in the mirror state for the area corresponding to the column of the light control mirror 403 closest to the lens 42a. Is set to the transmissive state, the optical path length from the LCD 30b to the lens 42a can be made the shortest, and the display distance of the corresponding virtual image can be made the shortest. Conversely, in the area corresponding to the column of the light control mirror 403 farthest from the lens 42a, only the light control mirror 403 in the uppermost row is set to the mirror state, and the other is set to the transmission state. The optical path length can be made the longest, and the display distance of the corresponding virtual image can be made the longest.
- the length can be made relatively longer than other areas, and the display distance of the corresponding virtual image can be increased.
- the number of the light control mirrors 403 is not limited to 3 rows and 3 columns as shown, and can be appropriately configured according to the number of areas.
- FIG. 18 is a diagram showing an outline of an example of display distance adjustment using a movable diffusion plate in the head-up display device of the present embodiment.
- the image projected from the projector 30a is imaged by a movable diffuser plate (movable diffuser) 41c and then incident on the mirror 52 through the lens 42a.
- the movable diffusion plate 41c can be moved and / or rotated along the optical axis direction by the diffusion plate movable portion 284 and the diffusion plate movable mechanism 404 shown in FIG.
- the display position of the virtual image based on the image projected from the projector 30a is determined according to the distance and / or inclination between the movable diffusion plate 41c and the lens 42a. Therefore, the display distance of the virtual image can be changed by changing the focal length by moving and / or rotating the movable diffusion plate 41c.
- the display distance of the virtual image can be reduced by moving and / or rotating the movable diffusion plate 41c to a position close to the lens 42a. Conversely, the display distance of the virtual image can be increased by moving and / or rotating the movable diffusion plate 41c to a position far from the lens 42a.
- FIG. 19 is a diagram showing an outline of an example of display distance adjustment using the movable optical filter in the head-up display device of the present embodiment.
- a movable optical filter 43a is installed between a lens 42a and a diffuser plate (diffuser) 41b, and as shown in FIGS. 19A and 19B, the movable optical filter 43a is used as an optical path.
- the focal distance for each area the display distance of the virtual image is changed.
- the optical filter is a member having a characteristic of changing a focal length by a single optical component such as a lens or a combination thereof.
- a plurality of optical filters having different refractive indexes are combined to form one optical filter having a different refractive index for each region, and a movable optical filter 43a that can be inserted into and removed from the optical path.
- the movable image filter 43a is inserted into and extracted from the optical path by the optical filter movable unit 285 and the optical filter movable mechanism 405 shown in FIG. The display distance can be changed.
- the focal length of the optical filter corresponding to the lowermost area is minimized,
- the display distance of the virtual image can be shortened, and the focal distance of the optical filter corresponding to the uppermost area can be maximized to shorten the display distance of the virtual image.
- the diffusion plate 41b and the lens 42a are provided for this area.
- the display distance of the virtual image is determined by the distance between and the virtual image display distance can be made farther than the other areas passing through the optical filter.
- the number of regions having different focal lengths in the movable optical filter 43a is not limited to three as shown in the figure, and can be appropriately configured according to the number of areas.
- FIG. 20 is a diagram schematically showing an example of display distance adjustment using a comb-like optical filter in the head-up display device of the present embodiment.
- the image projected from the projector 30a is imaged by a diffusion plate (diffuser) 41b and then incident on the mirror 52 via the comb-like optical filter 43b and the lens 42a.
- the comb-like optical filter 43b is a member provided with a comb-like optical filter portion that has the same function as a lens and can change the display distance of a virtual image according to the focal length.
- the optical filter portion and the portion without the optical filter are associated with each other (not limited to each line but can be set to any line) of the image projected from the projector 30a. By doing so, the display distance of the virtual image can be changed in units of lines.
- the display distance of the virtual image based on the image of the line corresponding to the optical filter portion can be reduced, and the display distance of the virtual image based on the image of the line corresponding to the portion without the optical filter can be increased.
- the head-up display device According to the embodiment of the present invention, even when the virtual image cannot be superimposed on the scenery in front of the vehicle 2 depending on the traveling state of the vehicle 2.
- the AR function can be realized by appropriately superimposing the virtual image on the front landscape. Furthermore, it is possible to appropriately adjust the display distance of the virtual image according to the traveling state or the like.
- FIGS. 21A and 21B show a normal display state when the vehicle 2 is traveling on a flat road (see FIG. 21B).
- a navigation display 351 comprising a plurality of guide arrows indicating the traveling direction of the vehicle inside the HUD display area 35 at the substantially central portion thereof. Is superimposed on the road as if looking down from the driver.
- the arrow which is a display object, is displayed with its size changed according to the distance from the vehicle 2, and in this example, the traveling direction is turned left in front of the vehicle.
- symbol 34 in a figure has shown the dashboard.
- FIGS. 22A and 22B show a display state when the vehicle 2 is traveling on the uphill or near the top of the uphill (see, for example, FIG. 22B).
- the navigation display 351 displayed in the HUD display area 35 in the windshield 3 is crushed, which makes it difficult for the driver to see. End up.
- the road in front of the windshield 3 moves out of the HUD display area 35 in the horizontal direction (right side in this example), and the same as above.
- the portion indicating the left turn of the navigation display 351 cannot be displayed.
- FIG. 26 (a) and 26 (b) show measures for solving the problem shown in FIG. 22 in particular.
- a plurality of guide arrows indicating the traveling direction of the vehicle are shown.
- the navigation display 351 is superimposed and displayed on the road as if looking up from the driver.
- FIG. 26A shows a navigation display for a left turn
- FIG. 26B shows a navigation display for a right turn.
- the arrow constituting the navigation display 351 is displayed so that the closer to the vehicle, the closer to the top of the HUD display area 35, and the farther the arrow, the closer to the top of the hill.
- the Rukoto The left turn or right turn corner is displayed so as to be located near the top of the slope.
- FIGS. 27 (a) and (b) show other countermeasures for solving the above-mentioned problems on the uphill and the top of the uphill, and as is clear from these figures, In particular, this is an effective measure when the HUD display area 35 in the windshield 3 is located above the top of the slope, and therefore, navigation display 351 on the road including a corner is impossible. Also in this case, similarly to the above, the navigation display 351 composed of a plurality of guide arrows indicating the traveling direction of the vehicle is superimposed and displayed on the road as if looking up from the driver. Note that FIG. 27A shows a navigation display for a left turn, and FIG. 27B shows a navigation display for a right turn. In this case, the left turn or right turn corner is displayed at the lower end of the HUD display area 35.
- FIGS. 28A and 28B particularly show measures for solving the problem shown in FIG. 23, particularly for left or right turn off the HUD display area 35.
- the corner is displayed using the upper end of the HUD display area 35.
- FIG. 28A shows the navigation display in the case of a left turn
- FIG. 28B shows the navigation display in the case of a right turn.
- the left turn or the right turn is displayed by an arrow having a size corresponding to the distance from the vehicle.
- these corners can be displayed with an arrow 352 having a different form from the arrow 351 indicating straight travel along the road, so that the driver can be emphasized and displayed as supplementary information. It becomes.
- different display forms of the arrow 352 include, for example, different colors or blinking display.
- FIGS. 29A to 29D show measures for solving the problems shown in FIG. 24 in particular. That is, in a situation where the vehicle approaches a curve and the road deviates from the HUD display area 35 in the lateral direction, the arrow 352 having a form different from the arrow 351 indicating the straight traveling along the road is used as described above. By doing this, the left or right turn corner is displayed. In addition, the display of the arrow 352 of a different form is performed in the position of the left or right side edge part of the HUD display area 35.
- FIG. 29A shows a navigation display for a left turn on a right curve
- FIG. 29B shows a navigation display for a right turn on a right curve
- FIG. 29A shows a navigation display for a left turn on a right curve
- FIG. 29B shows a navigation display for a right turn on a right curve
- FIG. 29C shows a left turn on a left curve.
- FIG. 29D shows a navigation display in the case of a right turn on the left curve.
- the color of the arrow 352 can be different from that of the arrow 351 or can be blinked. Will.
- This countermeasure plan is a combination of the plan shown in FIG. 27 (or FIG. 26) and the plan shown in FIG. 29.
- the navigation display 351 composed of the plurality of guide arrows described above is superimposed on the road as seen from the driver, and the arrow 352 having a different form is displayed on the left, right, top, bottom of the HUD display area 35. It is displayed close to the four corners.
- FIG. 30A shows a navigation display for a left turn on a right curve
- FIG. 30B shows a navigation display for a right turn on a right curve
- FIG. 30C shows a left curve.
- FIG. 30D shows the navigation display in the case of a right turn on the left curve.
- FIG. 31 (a) to 31 (d) show proposed measures for the curve near the end of the downhill.
- a navigation display 351 composed of a plurality of guide arrows is displayed superimposed on the road, and a turn or right turn corner that is outside the HUD display area 35 is displayed. Is displayed in close proximity to the left, right, top and bottom corners of the HUD display area 35 using arrows 352 having a different form.
- FIG. 31 (a) shows the navigation display in the case of a left turn in the right curve
- FIG. 31 (b) shows the navigation display in the case of a right turn in the right curve
- FIG. 31 (c) shows the left curve.
- FIG. 31D shows the navigation display in the case of a right turn in the left curve.
- FIG. 32 shows a flowchart as software for that.
- this software is stored in advance in a memory in the control unit 20, for example, and is displayed by the ECU 21 (for example, see FIGS. 3 to 5) in the display image change / determination (S23) process in FIG. Is to be executed.
- a normal HUD operation from the ECU 21 is received (S311), and whether the distance to the corner at which the vehicle turns left or right (referred to as “left and right turn point”) is less than a predetermined threshold value. It is determined whether or not (S312). As a result, in the case of “no”, the process returns to the HUD normal operation of S311 (S313).
- the predetermined threshold is, for example, the distance from the vehicle to the left and right turn points, and is a distance for performing navigation display superimposed on the road, and is set to 100 m as an example. In other words, when the distance to the left and right turn location is 80 m, navigation display of the left and right turn location is performed, and when 120 m, the navigation display is not performed.
- the vertical position of the left and right folding points is within the HUD display area described above. (S314).
- the vertical position of the left and right folding points is the left and right folding points in the HUD display area 35 disposed substantially at the center of the windshield 3 of the vehicle 2 as shown in FIGS. This means the so-called vertical position.
- the countermeasure shown in FIG. 30 (however, the height of the corner is the HUD display area). (S317 is different).
- the countermeasure of FIG. 26 is implemented (S318).
- the result of the determination in S315 is “no”, that is, if the left and right turn points are visible regardless of the convex shape of the road, the left and right turn points are to the left of the HUD display area, as in S316.
- the countermeasure of FIG. 29 is implemented (S320).
- the normal display shown in FIG. 21 is performed (S321).
- the left and right folding points are further at the lower end of the HUD display area. It is determined whether it is below (S322). As a result, when it is determined that “yes”, that is, the left / right folding place is below the HUD display area, it is further determined whether the left / right folding place is to the left or right of the HUD display area. Determination is made (S323). If the result is “yes”, the countermeasure display shown in FIG. 30 is performed (S324). On the other hand, if it is determined as “no”, the normal display shown in FIG. 27 is performed (S325).
- a virtual image corresponding to the traveling state of the vehicle is obtained by changing the form of navigation display (including the horizontal and vertical positions in the HUD display area) according to the road shape.
- a head-up display device capable of displaying an image so as to be appropriately superimposed on an actual landscape.
- the road shape that changes variously in the windshield 3 is obtained from the navigation information shown in FIG.
- Image information from the front of the vehicle is captured from outside the vehicle 116, and further, although not shown, image information from a camera provided toward the front of the vehicle in the vicinity of the driver's eyes (ie, eye point) is captured and image analysis is performed. It is natural for those skilled in the art that it can be realized by such a method.
- the eyebox represents the range of viewpoints where the HUD video display can be visually recognized.
- the eyebox is divided into left and right areas individually by the functional liquid crystal film 401 disposed on the upper surface of the dashboard. Control is possible.
- the monocular vision is suitable and the monocular vision is set to the right eye according to the preferred determination
- the right half of the functional liquid crystal film is set in a white state as shown in FIG.
- this eye box is indicated by a broken line 73 at a position immediately before the driver's eyes 5.
- the driver reflects the image light projected from the projector 30a to the mirror 52 through various optical components 41c and 42a, and further to the functional liquid crystal described above.
- the image light of the navigation display reflected through the film 401 and then reflected on the windshield 3 is projected onto the driver's eyes.
- the driver can recognize the navigation display as a virtual image in front of the windshield 3.
- an example in which half of the functional liquid crystal film is in a white state in order to block the image light is shown.
- the liquid crystal film is opaque, and other colors such as gray may be used. Good.
- the size / shape of the eye box 73 is switched by the control of the functional liquid crystal film 401, that is, the right and left Switching between monocular viewing with either eye (see FIG. 34 (a) or (b)) and binocular viewing with both eyes (see FIG. 34 (c)) is controlled (hereinafter referred to as “monocular viewing / both viewing”).
- monocular viewing / both viewing We examined measures to reduce the burden on the driver who would continue to see virtual images displayed in 3D in the HUD display area 35 in front of the windshield 3. .
- FIG. 35 is a flowchart showing the contents of the eyebox control process. First, when the eyebox control process is started, the determination result of the monocular / binocular vision favorableness determination process shown in detail below is captured ( S260).
- the monocular / binocular vision determination process When the monocular / binocular vision determination process is started, first, is the difference between the distance between the real scene (that is, the landscape that can be seen through the windshield) and the virtual image (that is, the navigation display that can be seen through the windshield) greater than or equal to the specified value? It is determined whether or not (S270). As a result, when it is determined as “Yes”, a monocular is suitably set (S271), and the series of processes is terminated. As is clear from the above description, this setting is captured as a determination result of the monocular / binocular vision suitable determination process in the process indicated by S260 in FIG.
- the distance of the actual scene, the inclination of the driver's head, and the brightness of the passenger compartment are the vehicle information acquisition devices shown in FIG. It will be apparent to those skilled in the art that the use of the vehicle interior 115 and the camera 116 (outside the vehicle) can be easily obtained.
- navigation information display that can reduce the burden on the driver even during long-time driving is performed. It is possible to realize a head-up display device capable of
- the software for executing the monocular / binocular control of the navigation information display described above is also stored in advance in, for example, the memory in the control unit 20 constituting the head-up display device according to the present invention, as described above. It is stored and executed by the ECU 21 (see, for example, FIGS. 3 to 5).
- the present invention made by the present inventor has been specifically described based on the embodiments.
- the present invention is not limited to the above-described embodiments, and various modifications can be made without departing from the scope of the invention. Needless to say.
- the above-described embodiment has been described in detail for easy understanding of the present invention, and is not necessarily limited to the one having all the configurations described.
- the present invention can be used for a head-up display device using AR.
- HUD display area 351 ... Navigation display (arrow), 352 ... Arrow of different form, 40 ... Display distance adjustment mechanism, 41a ... Diffusion plate, 41b ... Diffusion plate, 41c ... Movable diffusion plate, 42a ... Lens, 42b ... Movable lens, 43a ... Movable optical filter, 43b ... Comb-like optical filter, 50 ... Mirror drive unit, 51 ... Mirror, 51a ... Mirror, 51b ... Dimming mirror, 52 ... Mirror, 60 ... Speaker, DESCRIPTION OF SYMBOLS 101 ... Vehicle speed sensor, 102 ... Shift position sensor, 103 ... Steering wheel angle sensor, 104 ... Headlight sensor, 105 ... Illuminance sensor, 106 ...
- SYMBOLS 101 ... Vehicle speed sensor, 102 ... Shift position sensor, 103 ... Steering wheel angle sensor, 104 ... Headlight sensor, 105 ... Illuminance sensor, 106 ...
- Chromaticity sensor 107 ... Ranging sensor, 108 ... Infrared sensor, 109 ... Engine start 110, acceleration sensor, 111 ... gyro sensor, 112 ... temperature sensor, 113 ... wireless receiver for road-to-vehicle communication, 114 ... wireless receiver for vehicle-to-vehicle communication, 115 ... camera (inside the vehicle), 116 ... camera (outside the vehicle) 117 ... GPS receiver, 118 ... VICS receiver, 281 ... functional liquid crystal film ON / OFF control unit, 282 ... lens movable unit, 283 ... dimming mirror ON / OFF control unit, 284 ... diffuser plate movable unit, 285 ... optical filter movable unit, 401: Functional liquid crystal film, 402: Lens movable mechanism, 403: Light control mirror, 404: Diffuser movable mechanism, 405: Optical filter movable mechanism.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Optics & Photonics (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Multimedia (AREA)
- Chemical & Material Sciences (AREA)
- Transportation (AREA)
- Signal Processing (AREA)
- Combustion & Propulsion (AREA)
- Computer Hardware Design (AREA)
- Theoretical Computer Science (AREA)
- Geometry (AREA)
- Instrument Panels (AREA)
- Testing, Inspecting, Measuring Of Stereoscopic Televisions And Televisions (AREA)
- Controls And Circuits For Display Device (AREA)
Abstract
車両の走行状況に応じて虚像を実際の風景に適切に重畳させるよう表示することを可能とするヘッドアップディスプレイ装置を提供する。車両2が検知することができる各種の車両情報4を取得する車両情報取得部10と、車両情報4に基づいて、映像の表示を制御する制御部20と、制御部20からの指示に基づいて映像を形成する映像表示装置30と、映像表示装置30が形成した映像を反射してウィンドシールド3に投射するミラー52と、制御部20からの指示に基づいてミラー52の角度を変化させるミラー駆動部50と、運転者に対する虚像の表示距離を調整する表示距離調整機構40とを有し、制御部20は、車両情報4に基づいて、運転者に対して風景に虚像を重畳させて表示することが可能となるよう、ミラー駆動部50を介してミラー52の角度を調整する。
Description
本発明は、ヘッドアップディスプレイ装置の技術に関し、特に、AR(Augmented Reality:拡張現実)を利用したヘッドアップディスプレイ装置に適用して有効な技術に関するものである。
例えば、自動車等の車両において、通常は、車速やエンジン回転数等の情報は、ダッシュボード内の計器盤(インパネ)に表示される。また、カーナビゲーション等の画面は、ダッシュボードに組み込まれもしくはダッシュボード上に設置されたディスプレイに表示される。運転者がこれらの情報を視認する場合に視線を大きく移動させることが必要となることから、視線の移動量を低減させる技術として、車速等の情報やカーナビゲーションに係る指示等の情報をフロントガラス(ウィンドシールド)に投射して表示するヘッドアップディスプレイ(Head Up Display、以下では「HUD」と記載する場合がある)が知られている。
HUDも含む車載の表示装置では、車両が走行状況に応じて振動したり傾いたりする場合があるため、表示映像の視認性に問題が生じる場合や、適切な内容を表示できない場合等が生じ得る。
HUDにおける表示映像の視認性の改善等に関連する技術として、例えば、特開2013-237320号公報(特許文献1)には、車体に生じる回転成分を当該車体の傾きとして取得して、これに基づいて映像を3次元的に回転補正し、回転補正した映像を表示するための位置と傾きを決定して投影表示することが記載されている。
また、特開2007-55365号公報(特許文献2)には、HUDに距離スケールを表示する際に、ナビゲーション装置の地図データから、自車両が現在走行している走行地点情報と、自車両が走行するであろう走行予定地点情報とを取得し、これに基づいて自車両が走行する道路の傾斜角度を取得して、傾斜角度に応じた補正係数を用いて距離スケールの地面からの表示高さを補正して表示することが記載されている。
また、特開2006-7867号公報(特許文献3)には、検出した右左折、加減速等の走行状況に応じて、生成した映像の表示位置を、例えば、左折を検出した場合には左の方向にシフトし、右折を検出した場合には右の方向にシフトする、等のように制御することが記載されている。
また、特開2015-202842号公報(特許文献4)には、車両状態に従って運転者の視界が確保される方向に、映像情報の表示位置を移動させることが記載されている。
HUDは、映像をウィンドシールドに投射することで、当該映像を車外における虚像として運転者に認識させるものである。これに対し、ウィンドシールド越しに見える車外の実際の風景に虚像を重畳させるように表示することで、対象物等に係る情報を運転者に示すことを可能とするいわゆるAR機能を実現するHUD(以下では「AR-HUD」と記載する場合がある)が知られている。このようなAR-HUDにおいても、車両の走行状況等に応じて表示映像の視認性や適切性等を維持するための調整を行う必要がある。
この点、例えば、上記の特許文献1~3に記載されたような技術を用いることで、車両が走行状況に応じて振動したり傾いたりする場合でも、表示映像(虚像)の視認性や適切性に与える影響を低減・解消させることが可能である。一方で、これらの技術では、HUDにおける虚像の表示領域内に表示される映像を対象として、その表示位置や表示内容等を走行状況に応じて調整するものである。しかしながら、HUDの場合は、運転者の視線の移動量を低減させるという効果を車両の走行状況に関わらず得られるようにすることも考慮して、表示領域内の映像の調整だけでなく表示領域自体についても位置を移動させる等の調整を行うのが望ましい。
この点、特許文献4に記載された技術では、車両状態に応じてHUDにおける表示領域自体を移動させることが可能である。しかしながら、特許文献4に記載された技術は、車両状態に変化が生じた場合でも運転者の視界を確保することを目的としたものであり、HUDにおける表示領域を運転者の障害とならないような位置に移動させるものである。このような技術をAR-HUDに適用すると、運転者の視界に含まれる実際の風景に虚像を重畳させることができなくなる場合が生じ、AR機能が実効性を有さないことになる。
そこで本発明の目的は、車両の走行状況に応じて虚像を実際の風景に適切に重畳させるよう表示することを可能とするヘッドアップディスプレイ装置を提供することにある。
本発明の前記ならびにその他の目的と新規な特徴は、本明細書の記述および添付図面から明らかになるであろう。
本願において開示される発明のうち、代表的なものの概要を簡単に説明すれば、以下のとおりである。
本発明の代表的な実施の形態によるヘッドアップディスプレイ装置は、車両のウィンドシールドに映像を投射することで、運転者に対して前記車両の前方の風景に重畳させて虚像を表示するヘッドアップディスプレイ装置であって、前記車両が検知することができる各種の車両情報を取得する車両情報取得部と、前記車両情報取得部が取得した前記車両情報に基づいて、前記映像の表示を制御する制御部と、前記制御部からの指示に基づいて前記映像を形成する映像表示装置と、前記映像表示装置が形成した前記映像を反射して前記ウィンドシールドに投射するミラーと、前記制御部からの指示に基づいて前記ミラーの角度を変化させるミラー駆動部と、前記運転者に対する前記虚像の表示距離を調整する表示距離調整機構と、を有するものである。
そして、前記制御部は、前記車両情報に基づいて、前記運転者に対して前記風景に前記虚像を重畳させて表示することが可能となるよう、前記ミラー駆動部を介して前記ミラーの角度を調整する。
本願において開示される発明のうち、代表的なものによって得られる効果を簡単に説明すれば以下のとおりである。
すなわち、本発明の代表的な実施の形態によれば、AR-HUDにおいて車両の走行状況に応じて虚像を実際の風景に適切に重畳させるよう表示することが可能となる。
以下、本発明の実施の形態を図面に基づいて詳細に説明する。なお、実施の形態を説明するための全図において、同一部には原則として同一の符号を付し、その繰り返しの説明は省略する。一方で、ある図において符号を付して説明した部位について、他の図の説明の際に再度の図示はしないが同一の符号を付して言及する場合がある。
<装置構成>
図2は、本発明の一実施の形態であるヘッドアップディスプレイ装置の動作概念の例について概要を示した図である。本実施の形態のAR-HUD1では、プロジェクタやLCD(Liquid Crystal Display)等からなる映像表示装置30に表示された映像を、ミラー51やミラー52(例えば、自由曲面ミラーや光軸非対称の形状を有するミラー等)により反射させて、車両2のウィンドシールド3に投射する。
図2は、本発明の一実施の形態であるヘッドアップディスプレイ装置の動作概念の例について概要を示した図である。本実施の形態のAR-HUD1では、プロジェクタやLCD(Liquid Crystal Display)等からなる映像表示装置30に表示された映像を、ミラー51やミラー52(例えば、自由曲面ミラーや光軸非対称の形状を有するミラー等)により反射させて、車両2のウィンドシールド3に投射する。
運転者5は、ウィンドシールド3に投射された映像を見ることで、透明のウィンドシールド3を通してその前方に虚像として上記映像を視認する。本実施の形態では、後述するように、ミラー52の角度を調整することで、映像をウィンドシールド3に投射する位置を調整することにより、運転者5が見る虚像の表示位置を上下方向に調整することが可能である。また、後述する各種の手法を用いることで、虚像を近方(例えば2~3m先)に表示したり、遠方(例えば30~40m先)に表示したり等、表示距離を調整することも可能である。そして、虚像を車外の風景(道路や建物、人等)に重畳させるようにその表示位置や表示距離を調整することで、AR機能を実現する。
図1は、本発明の一実施の形態であるヘッドアップディスプレイ装置の全体の構成例について概要を示した機能ブロック図である。車両2に搭載されたAR-HUD1は、例えば、車両情報取得部10、制御部20、映像表示装置30、表示距離調整機構40、ミラー駆動部50、ミラー52、およびスピーカ60からなる。なお、図1の例では、車両2の形状を乗用車のように表示しているが、特にこれに限られず、車両一般に適宜適用することができる。
車両情報取得部10は、車両2の各部に設置された後述するような各種のセンサ等の情報取得デバイスからなり、車両2で生じた各種イベントを検知したり、所定の間隔で走行状況に係る各種パラメータの値を検知・取得したりすることで車両情報4を取得して出力する。車両情報4には、図示するように、例えば、車両2の速度情報やギア情報、ハンドル操舵角情報、ランプ点灯情報、外光情報、距離情報、赤外線情報、エンジンON/OFF情報、カメラ映像情報(車内/車外)、加速度ジャイロ情報、GPS(Global Positioning System)情報、ナビゲーション情報、車車間通信情報、および路車間通信情報等が含まれ得る。
制御部20は、AR-HUD1の動作を制御する機能を有し、例えば、CPU(Central Processing Unit)とこれにより実行されるソフトウェアにより実装される。マイコンやFPGA(Field Programmable Gate Array)等のハードウェアにより実装されていてもよい。制御部20は、図2にも示したように、車両情報取得部10から取得した車両情報4等に基づいて、虚像として表示する映像を映像表示装置30を駆動して形成し、これをミラー52等によって適宜反射させることでウィンドシールド3に投射する。そして、後述するような手法により、虚像の表示領域の表示位置を調整したり、虚像の表示距離を調整したり等の制御を行う。
映像表示装置30は、上述したように、例えば、プロジェクタやLCDにより構成されるデバイスであり、制御部20からの指示に基づいて虚像を表示するための映像を形成してこれを投射したり表示したりする。表示距離調整機構40は、制御部20からの指示に基づいて、表示される虚像の運転者5からの距離を調整するための機構であり、例えば、後述するような各種の表示距離調整手法のいずれか1つ以上を実装したものである。
ミラー駆動部50は、制御部20からの指示に基づいてミラー52の角度を調整し、虚像の表示領域の位置を上下方向に調整する。虚像の表示領域の位置の調整については後述する。スピーカ60は、AR-HUD1に係る音声出力を行う。例えば、ナビゲーションシステムの音声案内や、AR機能によって運転者5に警告等を通知する際の音声出力等を行うことができる。
図3は、本実施の形態のヘッドアップディスプレイ装置における車両情報4の取得に係るハードウェア構成の例について概要を示した図である。ここでは主に車両情報取得部10および制御部20の一部のハードウェア構成について示す。車両情報4の取得は、例えば、ECU(Electronic Control Unit)21の制御の下、ECU21に接続された各種のセンサ等の情報取得デバイスにより行われる。
これらの情報取得デバイスとして、例えば、車速センサ101、シフトポジションセンサ102、ハンドル操舵角センサ103、ヘッドライトセンサ104、照度センサ105、色度センサ106、測距センサ107、赤外線センサ108、エンジン始動センサ109、加速度センサ110、ジャイロセンサ111、温度センサ112、路車間通信用無線受信機113、車車間通信用無線受信機114、カメラ(車内)115、カメラ(車外)116、GPS受信機117、およびVICS(Vehicle Information and Communication System:道路交通情報通信システム、登録商標(以下同様))受信機118等の各デバイスを有する。必ずしもこれら全てのデバイスを備えている必要はなく、また、他の種類のデバイスを備えていてもよい。備えているデバイスによって取得できる車両情報4を適宜用いることができる。
車速センサ101は、車両2の速度情報を取得する。シフトポジションセンサ102は、車両2の現在のギア情報を取得する。ハンドル操舵角センサ103は、ハンドル操舵角情報を取得する。ヘッドライトセンサ104は、ヘッドライトのON/OFFに係るランプ点灯情報を取得する。照度センサ105および色度センサ106は、外光情報を取得する。測距センサ107は、車両2と外部の物体との間の距離情報を取得する。赤外線センサ108は、車両2の近距離における物体の有無や距離等に係る赤外線情報を取得する。エンジン始動センサ109は、エンジンON/OFF情報を検知する。
加速度センサ110およびジャイロセンサ111は、車両2の姿勢や挙動の情報として、加速度や角速度からなる加速度ジャイロ情報を取得する。温度センサ112は車内外の温度情報を取得する。路車間通信用無線受信機113および車車間通信用無線受信機114は、それぞれ、車両2と道路や標識、信号等との間の路車間通信により受信した路車間通信情報、および車両2と周辺の他の車両との間の車車間通信により受信した車車間通信情報を取得する。
カメラ(車内)115およびカメラ(車外)116は、それぞれ、車内および車外の状況の動画像を撮影してカメラ映像情報(車内/車外)を取得する。カメラ(車内)115では、例えば、運転者5の姿勢や、眼の位置、動き等を撮影する。得られた動画像を解析することにより、例えば、運転者5の疲労状況や視線の位置等を把握することが可能である。また、カメラ(車外)116では、車両2の前方や後方等の周囲の状況を撮影する。得られた動画像を解析することにより、例えば、周辺の他の車両や人等の移動物の有無、建物や地形、路面状況(雨や積雪、凍結、凹凸等)等を把握することが可能である。
GPS受信機117およびVICS受信機118は、それぞれ、GPS信号を受信して得られるGPS情報およびVICS信号を受信して得られるVICS情報を取得する。これらの情報を取得して利用するカーナビゲーションシステムの一部として実装されていてもよい。
図4は、本実施の形態のヘッドアップディスプレイ装置の構成例について詳細を示した機能ブロック図である。図4の例では、映像表示装置30がプロジェクタである場合を示しており、映像表示装置30は、例えば、光源31、照明光学系32、および表示素子33等の各部を有する。光源31は、投射用の照明光を発生する部材であり、例えば、高圧水銀ランプやキセノンランプ、LED(Light Emitting Diode)光源、レーザー光源等を用いることができる。照明光学系32は、光源31で発生した照明光を集光し、より均一化して表示素子33に照射する光学系である。表示素子33は、投射する映像を生成する素子であり、例えば、透過型液晶パネル、反射型液晶パネル、DMD(Digital Micromirror Device)(登録商標)パネル等を用いることができる。
制御部20は、より詳細には、ECU21、音声出力部22、不揮発性メモリ23、メモリ24、光源調整部25、歪み補正部26、表示素子駆動部27、表示距離調整部28、およびミラー調整部29等の各部を有する。ECU21は、図3に示したように、車両情報取得部10を介して車両情報4を取得するとともに、取得した情報を必要に応じて不揮発性メモリ23やメモリ24に記録、格納したり読み出したりする。不揮発性メモリ23には、各種制御のための設定値やパラメータ等の設定情報が格納されていてもよい。また、ECU21は、専用のプログラムを実行させる等により、AR-HUD1として表示する虚像に係る映像データを生成する。
音声出力部22は、必要に応じてスピーカ60を介して音声情報を出力する。光源調整部25は、映像表示装置30の光源31の発光量を調整する。光源31が複数ある場合にはそれぞれ個別に制御するようにしてもよい。歪み補正部26は、ECU21が生成した映像について、映像表示装置30によって車両2のウィンドシールド3に投射した場合に、ウィンドシールド3の曲率によって生じる映像の歪みを画像処理により補正する。表示素子駆動部27は、歪み補正部26による補正後の映像データに応じた駆動信号を表示素子33に対して送り、投射する映像を生成させる。
表示距離調整部28は、虚像の表示距離を調整する必要がある場合に、表示距離調整機構40を駆動して、映像表示装置30から投射される映像の表示距離を調整する。虚像の表示距離を調整する各種手法については後述する。ミラー調整部29は、虚像の表示領域自体の位置を調整する必要がある場合に、ミラー駆動部50を介してミラー52の角度を変更し、虚像の表示領域を上下に移動させる。虚像の表示領域の位置調整についても後述する。
図5は、本実施の形態のヘッドアップディスプレイ装置における表示距離調整に係る構成の例について詳細を示した図である。制御部20の表示距離調整部28は、さらに、ECU21により個別に制御される各部として、例えば、機能性液晶フィルムON/OFF制御部281、レンズ可動部282、調光ミラーON/OFF制御部283、拡散板可動部284、および光学フィルタ可動部285等を有する。また、これら各部により制御・駆動されるハードウェアやデバイス等として、表示距離調整機構40は、さらに、機能性液晶フィルム401、レンズ可動機構402、調光ミラー403、拡散板可動機構404、および光学フィルタ可動機構405等を有する。これら各部による虚像の表示距離の調整手法については後述する。
なお、AR-HUD1としてはこれら各部やデバイス等を全て備えている必要はなく、後述する虚像の表示距離の調整手法の中から適用するものを実装するために必要な各部を適宜備えていればよい。
<処理内容>
図6は、本実施の形態のヘッドアップディスプレイ装置の初期動作の例について概要を示したフローチャートである。停止中の車両2においてイグニッションスイッチがONされることでAR-HUD1の電源がONされると(S01)、AR-HUD1は、制御部20からの指示に基づいて、まず、車両情報取得部10により車両情報を取得する(S02)。そして、制御部20は、車両情報4のうち、照度センサ105や色度センサ106等により取得した外光情報に基づいて好適な明るさレベルを算出し(S03)、光源調整部25により光源31の発光量を制御して、算出した明るさレベルとなるように設定する(S04)。例えば、外光が明るい場合には明るさレベルを高くし、暗い場合には明るさレベルを低く設定する。
図6は、本実施の形態のヘッドアップディスプレイ装置の初期動作の例について概要を示したフローチャートである。停止中の車両2においてイグニッションスイッチがONされることでAR-HUD1の電源がONされると(S01)、AR-HUD1は、制御部20からの指示に基づいて、まず、車両情報取得部10により車両情報を取得する(S02)。そして、制御部20は、車両情報4のうち、照度センサ105や色度センサ106等により取得した外光情報に基づいて好適な明るさレベルを算出し(S03)、光源調整部25により光源31の発光量を制御して、算出した明るさレベルとなるように設定する(S04)。例えば、外光が明るい場合には明るさレベルを高くし、暗い場合には明るさレベルを低く設定する。
その後、ECU21により、虚像として表示する映像(例えば、初期画像)を決定、生成し(S05)、生成した映像に対して歪み補正部26により歪みを補正する処理を実施した後(S06)、表示素子駆動部27により表示素子33を駆動・制御して、投射する映像を形成させる(S07)。これにより、映像がウィンドシールド3に投射され、運転者5は虚像を視認することができるようになる。その後、ECU21もしくは表示距離調整部28により虚像の表示距離を算出・決定し(S08)、表示距離調整部28により表示距離調整機構40を駆動して、映像表示装置30から投射される映像の表示距離を制御する(S09)。
AR-HUD1全体で、上述した一連の初期動作も含む各部の起動・始動が完了すると、HUD-ON信号が出力されるが、制御部20ではこの信号を受けたか否かを判定する(S11)。受けていなければ、さらにHUD-ON信号を一定時間待ち受け(S12)、ステップS11でHUD-ON信号を受けたと判定されるまで、HUD-ON信号の待ち受け処理(S12)を繰り返す。ステップS11でHUD-ON信号を受けたと判定された場合は、後述するAR-HUD1の通常動作を開始し(S13)、一連の初期動作を終了する。
図7は、本実施の形態のヘッドアップディスプレイ装置の通常動作の例について概要を示したフローチャートである。通常動作においても、基本的な処理の流れは上述の図6に示した初期動作と概ね同様である。まず、AR-HUD1は、制御部20からの指示に基づいて、車両情報取得部10により車両情報を取得する(S21)。そして、制御部20は、車両情報4のうち、照度センサ105や色度センサ106等により取得した外光情報に基づいて明るさレベル調整処理を行う(S22)。
図8は、本実施の形態のヘッドアップディスプレイ装置の明るさレベル調整処理の例について概要を示したフローチャートである。明るさレベル調整処理を開始すると、まず、取得した外光情報に基づいて好適な明るさレベルを算出する(S221)。そして、現状設定されている明るさレベルと比較することにより、明るさレベルの変更の要否を判定する(S222)。変更が不要である場合にはそのまま明るさレベル調整処理を終了する。一方、変更が必要である場合には、光源調整部25により光源31の発光量を制御して、変更後の明るさレベルとなるように設定し(S223)、明るさレベル調整処理を終了する。なお、ステップS222において、ステップS221で算出した好適な明るさレベルと、現状設定されている明るさレベルとの間に差分がある場合でも、差分が所定の閾値以上である場合にのみ明るさレベルの変更が必要であると判定するようにしてもよい。
図7に戻り、その後、ECU21により、ステップS21で取得した最新の車両情報4に基づいて、虚像として表示する映像を現状のものから必要に応じて変更し、変更後の映像を決定、生成する(S23)。なお、車両情報4に基づいて表示内容を変更するパターンは、取得した車両情報4の内容やそれらの組み合わせ等に応じて多数のものがあり得る。例えば、速度情報が変化したことにより、常時表示されている速度表示の数値を変更する場合や、ナビゲーション情報に基づいて案内の矢印図形を表示/消去したり、矢印の形状や表示位置等を変更したりする場合等、様々なパターンがあり得る。
その後、本実施の形態では、車両2の走行状況に応じて視認性や表示内容の適切性等を維持するための調整・補正処理を行う。まず、虚像の表示領域自体の位置を調整する必要がある場合に、ミラー駆動部50を介してミラー52の角度を変更し、虚像の表示領域を上下に移動させるミラー調整処理を行う(S24)。その後さらに、車両2の振動に対して表示領域内における映像の表示位置を補正する振動補正処理を行う(S25)。ステップS24およびS25の調整・補正処理の詳細な内容については後述する。
その後、調整・補正した映像に対して歪み補正部26により歪みを補正する処理を実施した後(S26)、表示素子駆動部27により表示素子33を駆動・制御して投射する映像を形成させる(S27)。そして、ECU21もしくは表示距離調整部28により虚像の表示距離を算出・決定し(S28)、表示距離調整部28により表示距離調整機構40を駆動して、映像表示装置30から投射される映像の表示距離を制御する(S29)。
上述した一連の通常動作を実行している際に、車両2の停止等に伴って電源OFF等がなされると、AR-HUD1に対してHUD-OFF信号が出力されるが、制御部20ではこの信号を受けたか否かを判定する(S30)。HUD-OFF信号を受けていなければ、ステップS21に戻って、HUD-OFF信号を受けるまで一連の通常動作を繰り返す。HUD-OFF信号を受けたと判定された場合は、一連の通常動作を終了する。
<ミラー調整処理>
図9は、本実施の形態のヘッドアップディスプレイ装置における虚像の表示領域の位置を上下に調整する例について概要を示した図である。例えば、左、中央、右の各図において、上段には車両2が走行中の道路の勾配の状況と、運転者5の視野の状況を側面から見た状態を模式的に示している。また、下段には、それぞれの状態において、運転者5が見る車外の前方の風景と、これに重畳して表示される虚像の表示領域6(破線枠の矩形)の位置の状況を模式的に示している。
図9は、本実施の形態のヘッドアップディスプレイ装置における虚像の表示領域の位置を上下に調整する例について概要を示した図である。例えば、左、中央、右の各図において、上段には車両2が走行中の道路の勾配の状況と、運転者5の視野の状況を側面から見た状態を模式的に示している。また、下段には、それぞれの状態において、運転者5が見る車外の前方の風景と、これに重畳して表示される虚像の表示領域6(破線枠の矩形)の位置の状況を模式的に示している。
左側の図では、上段の図に示すように、車両2の現在地の道路の勾配(上り方向)と前方の道路の勾配(上り方向)とが略同一である場合、すなわち概ね平坦な道路を走行している場合を示している。この場合は、下段の図に示すように、車外の前方の風景(図9の例では道路上を走行する前方の車両)にAR機能により虚像(図9の例では感嘆符のマークもしくは画像)を重畳させて表示するには、虚像の表示領域6の上下方向の位置は通常のままでよい。すなわち、左側の下段の図に示す表示領域6の位置が、表示領域6の上下方向での基本の表示位置となる。
一方、中央の図では、車両2の現在地の道路の勾配(上り方向)が、前方の道路の勾配(上り方向)より大きい場合、すなわち前方が下り坂の道路を走行している場合を示している。この場合は、上段の図に示すように、車両2の位置における勾配に基づく運転者5の視野の高さ(図中の実線枠)に対して、前方の道路上を視野に入れるには視野を下方向に移動させる(図中の点線枠)必要がある。そして、この場合、下段の図に示すように、虚像の表示領域6の表示位置が基本の表示位置(点線枠の矩形)のままでは、車外の前方の風景にAR機能により虚像を重畳させることができないため、重畳させて表示するには表示領域6自体を下方向に移動させる必要がある。
同様に、右側の図では、車両2の現在地の道路の勾配(上り方向)が、前方の道路の勾配(上り方向)より小さい場合、すなわち前方が上り坂の道路を走行している場合を示している。この場合は、上段の図に示すように、車両2の位置における勾配に基づく運転者5の視野の高さ(図中の実線枠)に対して、前方の道路上を視野に入れるには視野を上方向に移動させる(図中の点線枠)必要がある。そして、この場合も、下段の図に示すように、虚像の表示領域6の表示位置が基本の表示位置(点線枠の矩形)のままでは、車外の前方の風景にAR機能により虚像を重畳させることができないため、重畳させて表示するには表示領域6自体を上方向に移動させる必要がある。
このように、走行状況に応じて虚像の表示領域6の上下方向の位置を移動させることが必要となる状況は、図9の例に示したような現在位置の勾配と前方の道路の勾配との間に一定量以上の差分があるような場合に限られない。例えば、高速道路等において車両2の速度が大きくなった場合、運転者5の視線は通常時に比べて一般に遠くを見るようになり、視野の高さが上方向に移動することになる。したがって、例えば、通常時に比べてさらに前方に存在する他の車両等を含む車外の風景に対して虚像を重畳させるには、表示領域6を上方向に移動させる必要が生じ得る。車両2の走行中に運転者5の姿勢や体勢が変化する等により、運転者5の眼の高さ位置自体が変化し、これにより視野の高さが上下方向に移動する場合等も同様である。
本実施の形態では、上述した図7のステップS24のミラー調整処理において、車両2の走行状況に応じてミラー駆動部50によりミラー52の角度を制御して、虚像の表示領域の上下方向の位置を図9の例に示したように調整する。
図10は、図7のステップS24のミラー調整処理の例について概要を示したフローチャートである。ミラー調整処理を開始すると、まず、現在のミラー52の角度を取得し(S241)、さらに、車両情報4に基づいて、ミラー52の角度の調整(すなわち虚像の表示領域の表示位置の調整)に関連するパラメータの現在値を取得する(S242)。
必要となるパラメータの種類は、どのような条件で表示領域の表示位置を調整するかにより異なり得る。例えば、図9に示した例では、関連するパラメータ値として、車両2の現在位置の勾配と、前方の道路の勾配との差分(相対的な勾配)を示す値を取得する。例えば、加速度ジャイロ情報により得られる車両2の傾きの情報から現在位置の勾配を把握することができる。また、車外のカメラ映像情報を解析することで前方の道路の勾配を把握することも可能である。また、ナビゲーション情報から得られる3次元の道路・地形情報等に基づいて現在位置および前方の道路の勾配を得ることも可能である。
次に、ステップS242で取得したパラメータ値に基づいて、予め定められた基準・条件等に基づいてミラー52の目標角度を算出する(S243)。どのパラメータに基づいてどのようなロジックで目標角度を算出するかは、どのような条件で表示領域の表示位置を調整するかにより異なり得る。例えば、図9に示した例では、現在地と前方の道路との相対的な勾配の絶対値が所定の閾値以上である場合に、相対的な勾配の符号に応じてミラー52の目標角度を決定する。上記の所定の閾値としては、例えば、虚像の表示領域の上下方向のFOV(Field Of View:視野角)の1/x(xは所定の値)等とすることができる。
なお、本実施の形態では、ステップS242で取得した現在のパラメータ値に基づいてミラー52の目標角度を算出するものとしているが、現在のパラメータ値や過去の値の履歴の情報に基づいて近い将来の状況を予測し、予測結果に基づいて目標角度を算出するようにしてもよい。例えば、パラメータ値の過去の履歴に基づいて値の遷移の傾向を分析し、当該傾向に基づいて近い将来のパラメータ値を予測するようにしてもよい。また、車外の前方のカメラ映像情報を解析することで近い将来における車両2の周辺状況を予測したり、ナビゲーション情報に基づいて車両2の前方の道路状況を把握したりすることも可能である。
次に、ステップS241で取得した現在のミラー52の角度と、ステップS243で取得した目標のミラー52の角度との差分の有無を判定する(S244)。判定に際しては、例えば、差分が所定の閾値以上である場合に差分ありと判定し、閾値以下の場合には差分なしと判定するようにしてもよい。また、差分ありの状態が一定時間以上継続した場合に限り差分ありと判定するようにしてもよい。これにより、例えば、車両2が縁石等の段差に乗り上げた場合等一時的・瞬間的に車両2の傾きが変化したような事象について、ミラー52の調整対象から除外することができる。
ステップS244で角度の差分がないと判定された場合は、そのままミラー調整処理を終了する。すなわち、ミラー52の角度の調整は行わず、現状の角度のままとする。一方、角度の差分があると判定された場合は、目標角度となるように指定方向にミラー52を回転させる(S245)。具体的には、ミラー駆動部50に対してミラー52を回転させる旨のミラー調整信号を出力する。そして、ミラー52が目標角度に達したか否かを判定し(S246)、達していない場合にはステップS245に戻ってミラー52の回転を継続する。すなわち、ミラー駆動部50に対するミラー調整信号の出力を継続する。一方、ミラー52が目標角度に達した場合は、ミラー52の回転を停止する(S247)。すなわち、ミラー駆動部50に対するミラー調整信号の出力を停止する。そして、一連のミラー調整処理を終了する。
<振動補正処理>
図11は、図7のステップS25の振動補正処理の例について概要を示したフローチャートである。振動補正処理を開始すると、まず、車両情報4に基づいて車両2の振動量の情報を取得する(S251)。例えば、加速度ジャイロ情報や車外のカメラ映像情報等に基づいて振動量(車両2における短周期の上下動の量)を把握することができる。なお、本実施の形態では、現在の車両情報4に基づいて振動情報を取得するものとしているが、例えば、車外の前方のカメラ映像情報を解析することで近い将来における車両2の周辺の路面状況を予測し、これに基づいて近い将来における車両2の振動量を予測するようにしてもよい。
図11は、図7のステップS25の振動補正処理の例について概要を示したフローチャートである。振動補正処理を開始すると、まず、車両情報4に基づいて車両2の振動量の情報を取得する(S251)。例えば、加速度ジャイロ情報や車外のカメラ映像情報等に基づいて振動量(車両2における短周期の上下動の量)を把握することができる。なお、本実施の形態では、現在の車両情報4に基づいて振動情報を取得するものとしているが、例えば、車外の前方のカメラ映像情報を解析することで近い将来における車両2の周辺の路面状況を予測し、これに基づいて近い将来における車両2の振動量を予測するようにしてもよい。
その後、ステップS251で取得した振動量が所定の閾値以上であるか否かを判定する(S252)。閾値未満である場合は、振動が微小であるとしてそのまま振動補正処理を終了する。すなわち、振動に伴う表示映像の補正は行わない。一方、振動量が閾値以上である場合は、表示領域における映像の表示ズレ量を算出する(S253)。例えば、車両2の実際の高さと虚像の表示領域の高さとの比に基づいて、車両2の振動量から表示領域における映像の表示ズレ量を算出する。そして、算出した表示ズレ量に基づいて、表示領域内での映像の表示位置を上下にオフセットし(S254)、一連の振動補正処理を終了する。
<虚像の表示距離調整>
制御部20の表示距離調整部28は、虚像の表示距離を調整する必要がある場合に、表示距離調整機構40を駆動して、映像表示装置30から投射される映像の表示距離を調整する。以下では、図5に示した表示距離調整部28および表示距離調整機構40の各部による、虚像の表示距離の調整手法について説明する。
制御部20の表示距離調整部28は、虚像の表示距離を調整する必要がある場合に、表示距離調整機構40を駆動して、映像表示装置30から投射される映像の表示距離を調整する。以下では、図5に示した表示距離調整部28および表示距離調整機構40の各部による、虚像の表示距離の調整手法について説明する。
[機能性液晶フィルム]
図12は、本実施の形態のヘッドアップディスプレイ装置における機能性液晶フィルム401を用いた表示距離調整の例について概要を示した図である。図12の例では、複数枚の機能性液晶フィルム401を拡散板(ディフューザ)41aとして使用する。そして、図12(a)および(b)に示すように、各機能性液晶フィルム401のエリア毎に白色状態にする箇所を変化させることで、エリア毎に焦点距離を変えて、虚像の表示距離(運転者5の眼の位置と虚像の表示位置との距離)を変化させる。
図12は、本実施の形態のヘッドアップディスプレイ装置における機能性液晶フィルム401を用いた表示距離調整の例について概要を示した図である。図12の例では、複数枚の機能性液晶フィルム401を拡散板(ディフューザ)41aとして使用する。そして、図12(a)および(b)に示すように、各機能性液晶フィルム401のエリア毎に白色状態にする箇所を変化させることで、エリア毎に焦点距離を変えて、虚像の表示距離(運転者5の眼の位置と虚像の表示位置との距離)を変化させる。
図13は、機能性液晶フィルム401による拡散板41aの構成例について概要を示した図である。機能性液晶フィルム401は、電気により透過状態と白色状態とを制御することができるフィルムである。機能性液晶フィルム401の白色状態の部分が拡散板としての機能を果たし、プロジェクタ30aにより投射された映像は、この白色状態の部分で結像する。本実施の形態では、複数枚の機能性液晶フィルム401について、それぞれ複数のエリア毎に個別に白色状態とするよう制御するものとする。
図12に戻り、図示するような構成において、プロジェクタ30aから投射された映像に基づく虚像の表示位置は、各機能性液晶フィルム401の白色状態の部分と、レンズ42aとの距離に応じて決定される。よって、レンズ42aとの距離がそれぞれ異なるように機能性液晶フィルム401を複数枚配置し、プロジェクタ30aから投射される映像について、図5に示した機能性液晶フィルムON/OFF制御部281によりエリア毎に機能性液晶フィルム401のいずれか1つを白色状態とすることで、エリア毎に虚像の表示距離を変化させることができる。
具体的には、例えば、図12(a)に示すように、対象のエリア(例えば最上部)について、レンズ42aに最も近い位置に配置された機能性液晶フィルム401のみを白色状態とし、他を透過状態とすることで、対応する虚像の表示距離を最も近くすることができる。逆に、図12(b)に示すように、対象のエリア(例えば最上部)について、レンズ42aから最も遠い位置に配置された機能性液晶フィルム401のみを白色状態とし、他を透過状態とすることで、対応する虚像の表示距離を最も遠くすることができる。
なお、図12、図13の例では、表示する映像について、上下方向に3つのエリアを設ける場合を例としているが、以下に説明する例も含めて、エリアの数はこれに限定されず、また、上下方向に限らず左右方向にエリアを分けることも当然可能である。また、機能性液晶フィルム401の枚数も図示するような3枚に限定されず、エリアの数に応じて適宜構成することができる。
[ミラーの複数枚配置]
図14は、本実施の形態のヘッドアップディスプレイ装置における複数枚のミラーを用いた表示距離調整の例について概要を示した図である。図14の例では、LCD30bとレンズ42aとの間にミラー51aを図示するように複数配置し、LCD30bからの映像をエリア毎に異なるミラー51aにより反射してレンズ42aに入射させている。これにより、LCD30bからレンズ42aまでの距離をエリア毎に異なるものとし、これに応じて虚像の表示距離を変えることができる。
図14は、本実施の形態のヘッドアップディスプレイ装置における複数枚のミラーを用いた表示距離調整の例について概要を示した図である。図14の例では、LCD30bとレンズ42aとの間にミラー51aを図示するように複数配置し、LCD30bからの映像をエリア毎に異なるミラー51aにより反射してレンズ42aに入射させている。これにより、LCD30bからレンズ42aまでの距離をエリア毎に異なるものとし、これに応じて虚像の表示距離を変えることができる。
具体的には、例えば、図14に示すように、LCD30bから最も遠い位置に配置されたミラー51a(レンズ42aからも最も遠い)により反射されるエリアにおいてLCD30bに映像を表示することで、対応する虚像の表示距離を最も遠くすることができる。逆に、LCD30bから最も近い位置に配置されたミラー51a(レンズ42aからも最も近い)により反射されるエリアにおいてLCD30bに映像を表示することで、対応する虚像の表示距離を最も近くすることができる。
なお、図14の例においても、ミラー51aの数は図示するような3枚に限定されず、エリアの数に応じて適宜構成することができる。
[可動式レンズ]
図15は、本実施の形態のヘッドアップディスプレイ装置における可動式レンズを用いた表示距離調整の例について概要を示した図である。図15の例では、プロジェクタ30aから投射された映像は、拡散板(ディフューザ)41bで結像した後、複数のエリアに分けて設けられた可動式レンズ42bを介してミラー52に入射される。
図15は、本実施の形態のヘッドアップディスプレイ装置における可動式レンズを用いた表示距離調整の例について概要を示した図である。図15の例では、プロジェクタ30aから投射された映像は、拡散板(ディフューザ)41bで結像した後、複数のエリアに分けて設けられた可動式レンズ42bを介してミラー52に入射される。
ここで、各可動式レンズ42bは、図5に示したレンズ可動部282およびレンズ可動機構402によって、それぞれ個別に光軸方向に沿って移動させることができる。プロジェクタ30aから投射された映像に基づく虚像の表示位置は、拡散板41bと各可動式レンズ42bとの距離に応じて決定される。よって、可動式レンズ42bを移動させることで、エリア毎に焦点距離を変えて、虚像の表示距離を変化させることができる。
具体的には、例えば、図15に示すように、最上部のエリアのように可動式レンズ42bを拡散板41bに近い位置に移動させることで、対応する虚像の表示距離を近くすることができる。逆に、最下部のエリアのように可動式レンズ42bを拡散板41bから遠い位置に移動させることで、対応する虚像の表示距離を遠くすることができる。
なお、図15の例においても、可動式レンズ42bの数は図示するような3つに限定されず、エリアの数に応じて適宜構成することができる。
[調光ミラー]
図16は、本実施の形態のヘッドアップディスプレイ装置における調光ミラー51bを用いた表示距離調整の例について概要を示した図である。図16の例では、LCD30bとレンズ42aとの間に複数の調光ミラー403を図示するように断面方向から見て行列状となるように配置することで調光ミラー51bを構成する。そして、図16(a)および(b)に示すように、鏡状態とする調光ミラー403の箇所を変化させることで、LCD30bからレンズ42aまでの距離をエリア毎に異なるものとし、これに応じて虚像の表示距離を変えることができる。
図16は、本実施の形態のヘッドアップディスプレイ装置における調光ミラー51bを用いた表示距離調整の例について概要を示した図である。図16の例では、LCD30bとレンズ42aとの間に複数の調光ミラー403を図示するように断面方向から見て行列状となるように配置することで調光ミラー51bを構成する。そして、図16(a)および(b)に示すように、鏡状態とする調光ミラー403の箇所を変化させることで、LCD30bからレンズ42aまでの距離をエリア毎に異なるものとし、これに応じて虚像の表示距離を変えることができる。
図17は、調光ミラー403の構成例について概要を示した図である。調光ミラー403は、電気により透過状態と鏡状態とを制御することができるフィルムやシート、ガラス等の部材である。透過状態となっている調光ミラー403は、LCD30bからの映像を透過し、鏡状態となっている調光ミラー403のみが、映像をレンズ42aの方向に反射させる。本実施の形態では、断面方向から見て行列状に配置された複数の調光ミラー403について、各行、各列(各エリア)につき1つの調光ミラー403のみが鏡状態となるよう、調光ミラーON/OFF制御部283により制御するものとする。
具体的には、例えば、図16(a)に示すように、レンズ42aから最も近い調光ミラー403の列に対応するエリアについて、最下段の行の調光ミラー403のみを鏡状態とし、他を透過状態とすることで、LCD30bからレンズ42aまでの光路長を最も短くすることができ、対応する虚像の表示距離を最も近くすることができる。逆に、レンズ42aから最も遠い調光ミラー403の列に対応するエリアについて、最上段の行の調光ミラー403のみを鏡状態とし、他を透過状態とすることで、LCD30bからレンズ42aまでの光路長を最も長くすることができ、対応する虚像の表示距離を最も遠くすることができる。
また、例えば、図16(b)に示すように、レンズ42aから最も近い調光ミラー403の列に対応するエリアについて、最上段の行の調光ミラー403のみを鏡状態とし、また、レンズ42aから次に近い調光ミラー403の列に対応するエリアについて、最下段の行の調光ミラー403のみを鏡状態とし、他を透過状態とする。これにより、これらのエリアのLCD30bからレンズ42aまでの光路長を比較的短くすることができ、対応する虚像の表示距離を近くすることができる。逆に、レンズ42aから最も遠い調光ミラー403の列に対応するエリアについて、中段の行の調光ミラー403のみを鏡状態とし、他を透過状態とすることで、LCD30bからレンズ42aまでの光路長を他のエリアより比較的長くすることができ、対応する虚像の表示距離を遠くすることができる。
なお、図16、図17の例においても、調光ミラー403の数は図示するような3行3列に限定されず、エリアの数に応じて適宜構成することができる。
[可動式拡散板]
図18は、本実施の形態のヘッドアップディスプレイ装置における可動式拡散板を用いた表示距離調整の例について概要を示した図である。図18の例では、プロジェクタ30aから投射された映像は、可動式拡散板(可動式ディフューザ)41cで結像した後、レンズ42aを介してミラー52に入射される。
図18は、本実施の形態のヘッドアップディスプレイ装置における可動式拡散板を用いた表示距離調整の例について概要を示した図である。図18の例では、プロジェクタ30aから投射された映像は、可動式拡散板(可動式ディフューザ)41cで結像した後、レンズ42aを介してミラー52に入射される。
ここで、可動式拡散板41cは、図5に示した拡散板可動部284および拡散板可動機構404によって、光軸方向に沿って移動および/または回転させることができる。プロジェクタ30aから投射された映像に基づく虚像の表示位置は、可動式拡散板41cとレンズ42aとの距離および/または傾きに応じて決定される。よって、可動式拡散板41cを移動および/または回転させることで、焦点距離を変えて虚像の表示距離を変化させることができる。
具体的には、可動式拡散板41cをレンズ42aに近い位置に移動および/または回転させることで、虚像の表示距離を近くすることができる。逆に、可動式拡散板41cをレンズ42aから遠い位置に移動および/または回転させることで、虚像の表示距離を遠くすることができる。
[可動式光学フィルタ]
図19は、本実施の形態のヘッドアップディスプレイ装置における可動式光学フィルタを用いた表示距離調整の例について概要を示した図である。図19の例では、レンズ42aと拡散板(ディフューザ)41bとの間に可動式光学フィルタ43aを設置し、図19(a)および(b)に示すように、可動式光学フィルタ43aを光路に対して挿抜することで、エリア毎に焦点距離を変えて、虚像の表示距離を変化させる。
図19は、本実施の形態のヘッドアップディスプレイ装置における可動式光学フィルタを用いた表示距離調整の例について概要を示した図である。図19の例では、レンズ42aと拡散板(ディフューザ)41bとの間に可動式光学フィルタ43aを設置し、図19(a)および(b)に示すように、可動式光学フィルタ43aを光路に対して挿抜することで、エリア毎に焦点距離を変えて、虚像の表示距離を変化させる。
光学フィルタは、レンズ等の光学部品単体もしくは組み合わせにより焦点距離を変える特性を有する部材である。本実施の形態では、それぞれ異なる屈折率を有する複数の光学フィルタを組み合わせて、領域毎に異なる屈折率を有する1つの光学フィルタを形成するとともに、光路に対して挿抜できるような可動式光学フィルタ43aとして構成する。領域毎に光学フィルタの焦点距離が異なることから、図5に示した光学フィルタ可動部285および光学フィルタ可動機構405によって、可動式光学フィルタ43aを光路に対して挿抜することで、エリア毎に虚像の表示距離を変化させることができる。
具体的には、例えば、図19(a)に示すように、可動式光学フィルタ43a全体を光路に対して挿入することで、最下段のエリアに対応する光学フィルタの焦点距離を最も短くし、虚像の表示距離を遠くするとともに、最上段のエリアに対応する光学フィルタの焦点距離を最も長くし、虚像の表示距離を近くすることができる。また、例えば、図19(b)に示すように、可動式光学フィルタ43aを一部抜出して最下段のエリアが光学フィルタを通らないようにすることで、このエリアについては拡散板41bとレンズ42aとの距離で虚像の表示距離が決まるようにし、光学フィルタを通る他のエリアよりも虚像の表示距離を遠くすることができる。
なお、図19の例においても、可動式光学フィルタ43aにおける焦点距離が異なる領域の数は図示するような3つに限定されず、エリアの数に応じて適宜構成することができる。
[くし状光学フィルタ]
図20は、本実施の形態のヘッドアップディスプレイ装置におけるくし状光学フィルタを用いた表示距離調整の例について概要を示した図である。図20の例では、プロジェクタ30aから投射された映像は、拡散板(ディフューザ)41bで結像した後、くし状光学フィルタ43bおよびレンズ42aを介してミラー52に入射される。
図20は、本実施の形態のヘッドアップディスプレイ装置におけるくし状光学フィルタを用いた表示距離調整の例について概要を示した図である。図20の例では、プロジェクタ30aから投射された映像は、拡散板(ディフューザ)41bで結像した後、くし状光学フィルタ43bおよびレンズ42aを介してミラー52に入射される。
くし状光学フィルタ43bは、レンズと同様の機能を有して焦点距離に応じて虚像の表示距離を変えることができる光学フィルタ部分がくし状に設けられた部材である。図20に示すように、例えば、プロジェクタ30aから投射された映像のライン単位(1ライン毎に限らず、任意のライン毎とすることができる)で光学フィルタ部分と光学フィルタがない部分とを対応させることで、ライン単位で虚像の表示距離を変えることができる。
具体的には、光学フィルタ部分に対応するラインの映像に基づく虚像の表示距離を近くし、光学フィルタがない部分に対応するラインの映像に基づく虚像の表示距離を遠くすることができる。
以上に説明したように、本発明の一実施の形態であるヘッドアップディスプレイ装置によれば、車両2の走行状況によって、車両2の前方の風景に虚像を重畳させることができなくなるような場合でも、虚像の表示領域自体の表示位置を上下方向に動的に調整することで、虚像を前方の風景に適切に重畳させてAR機能を実現することが可能となる。さらに、走行状況等に応じて虚像の表示距離を適切に調整することも可能となる。
<ナビゲーション情報の表示>
以上の説明では、例えば、上記の図7~図10において、ナビゲーション情報の表示について、様々なパターンが可能であり、さらには、その表示位置を変更するためのミラー調整処理等により、道路形状に応じてナビゲーション表示の仰俯角を変えることについて説明した。しかしながら、本発明のヘッドアップディスプレイ装置において、上記のナビゲーション表示を道路上に重畳表示させる場合、道路の形状によっては、当該ナビゲーション表示が見難くなる場合が発生することが分かった。
以上の説明では、例えば、上記の図7~図10において、ナビゲーション情報の表示について、様々なパターンが可能であり、さらには、その表示位置を変更するためのミラー調整処理等により、道路形状に応じてナビゲーション表示の仰俯角を変えることについて説明した。しかしながら、本発明のヘッドアップディスプレイ装置において、上記のナビゲーション表示を道路上に重畳表示させる場合、道路の形状によっては、当該ナビゲーション表示が見難くなる場合が発生することが分かった。
以下には、本発明の発明者等により検討された道路の形状によってナビゲーション表示が見難くなる場合とその対処案について詳細に述べる。
まず、図21(a)および(b)には、車両2が平坦な道路を走行中(図21(b)を参照)における通常表示の状態を示す。この状態では、図21(a)に示すように、ウィンドシールド3の前方には、その略中央部のHUD表示領域35の内部において、車両の進行方向を示す複数の案内矢印からなるナビゲーション表示351が、運転者から見下げているように、道路上に重畳されて表示される。なお、図では、表示オブジェクトである矢印は、車両2からの距離に応じて大きさを変えて表示されており、本例では、進行方向は、車両の前方において左折している。また、図中の符号34は、ダッシュボードを示している。
続いて、図22(a)および(b)には、車両2が上り坂や上り坂の頂上付近を走行中(例えば図22(b)を参照)における表示の状態を示しており、このような状態では、図22(a)からも明らかなように、ウィンドシールド3内のHUD表示領域35内に表示されるナビゲーション表示351が潰れてしまい、そのため、運転者にとっては見難いものとなってしまう。
また、図23(a)および(b)にも示すように、車両2が下り坂や下り坂の終わり付近を走行中(図23(b)を参照)においては、ウィンドシールド3前方の道路がHUD表示領域35から上方に外れてしまい、ナビゲーション表示351の左折を指示する部分が表示できなくなってしまう。
さらには、車両がカーブに差し掛かった場合には、図24に示すように、ウィンドシールド3前方の道路が、HUD表示領域35を横方向(本例では、右側)に外れてしまい、上記と同様に、ナビゲーション表示351の左折を指示する部分が表示できなくなってしまう。
加えて、車両が上り坂に差し掛かった場合にも、図25にも示すように、上り坂の頂上の反対側の道路の右折または左折の箇所(右左折箇所)は坂によって隠されてしまい、HUD表示領域35内には存在しないことから、当該箇所でのナビゲーション表示351を行うことができない等の種々の問題点が発見された。
そこで、上述した問題点を解決すべく検討された対処案について、以下に図面を参照しながら、詳細に説明する。
まず、図26(a)および(b)には、特に、上記図22に示した問題点を解消するための対策が示されており、ここでは、車両の進行方向を示す複数の案内矢印からなるナビゲーション表示351が、運転者からは見上げているように、道路上に重畳表示される。なお、図26(a)では、左折の場合のナビゲーション表示が、図26(b)には、右折の場合のナビゲーション表示が、それぞれ示されている。換言すれは、HUD表示領域35内において、ナビゲーション表示351を構成する矢印は、車両に近い程、当該HUD表示領域35の上部に位置し、遠い程、坂の頂上付近に位置するように表示されることとなる。そして、左折または右折の曲がり角の表示は、坂の頂上付近に位置するように表示される。
次に、図27(a)および(b)には、上述した上り坂や上り坂の頂上付近での問題点を解消する他の対策案であって、これらの図からも明らかなように、特に、ウィンドシールド3内のHUD表示領域35が坂の頂上よりも上方に位置してしまい、そのため、曲がり角を含めた道路上へのナビゲーション表示351が不可能な場合に有効な対策である。この場合においても、上記と同様に、車両の進行方向を示す複数の案内矢印からなるナビゲーション表示351が、運転者からは見上げているように、道路上に重畳表示される。なお、図27(a)には、左折の場合のナビゲーション表示が、図27(b)には、右折の場合のナビゲーション表示が、それぞれ示されている。そして、この場合には、左折または右折の曲がり角の表示は、HUD表示領域35の下端に位置するように表示されることとなる。
続いて、図28(a)および(b)には、特に、上記図23に示した問題点を解消するための対策が示されており、特に、HUD表示領域35を外れた左折または右折の曲がり角の表示を、HUD表示領域35の上端を利用して行うものである。なお、ここでも、図28(a)は、左折の場合のナビゲーション表示を、図28(b)は、右折の場合のナビゲーション表示を、それぞれ示す。なお、この場合には、上記左折または右折の曲がり角の表示は、車両からの距離に対応した大きさの矢印などによって行う。さらに、これらの曲がり角の表示は、道路に沿った直進を示す矢印351とは異なる形態の矢印352で行うことにより、運転者に対して、補足情報であることを強調して表示することが可能となる。なお、この矢印352の異なる表示形態としては、例えば、異なる色にする、あるいは、点滅表示することなどが含まれる。
加えて、図29(a)~(d)には、特に、上記図24に示した問題点を解消するための対策が示されている。すなわち、車両がカーブに差し掛かり、道路がHUD表示領域35を横方向に外れてしまう状況下においては、上記と同様に、道路に沿った直進を示す矢印351とは異なる形態の矢印352を利用することにより、左折または右折の曲がり角の表示を行う。なお、異なる形態の矢印352の表示は、HUD表示領域35の左または右の側端部の位置に行う。ここでは、図29(a)は、右カーブにおける左折の場合のナビゲーション表示を、図29(b)は、右カーブにおける右折の場合のナビゲーション表示を、図29(c)は、左カーブにおける左折の場合のナビゲーション表示を、図29(d)は、左カーブにおける右折の場合のナビゲーション表示を、それぞれ示している。また、ここでも、異なる形態の矢印352の表示は、運転者に対して補足情報であることを強調するために、その色を矢印351と異なる色にする、または、点滅表示することなどが可能であろう。
また、上り坂付近でのカーブにおける対策案が、図30(a)~(d)に示されている。この対策案は、上記図27(または、図26)に示した案と上記図29に示した案とを組み合わせたものであり、道路がHUD表示領域35を下方に外れてしまう状況下において、上述した複数の案内矢印からなるナビゲーション表示351を、運転者からは見上げているように、道路上に重畳して表示すると共に、それとは異なる形態の矢印352を、当該HUD表示領域35の左右上下の四隅に近接して表示するものである。なお、ここでも、図30(a)は、右カーブにおける左折の場合のナビゲーション表示を、図30(b)は、右カーブにおける右折の場合のナビゲーション表示を、図30(c)は、左カーブにおける左折の場合のナビゲーション表示を、図30(d)は、左カーブにおける右折の場合のナビゲーション表示を、それぞれ示している。
なお、図26に示した案と図29に示した案とを組み合わせた場合には、HUD表示領域35内での曲がり角を示す矢印の位置が異なる(すなわち、HUD表示領域の高さ方向の略中央部)のみであり、ここでは、その図示は省略する。
そして、図31(a)~(d)には、下り坂の終わり付近のカーブにおける対策案が示されている。この対策案においても、同様に、HUD表示領域35内においては、複数の案内矢印からなるナビゲーション表示351を道路上に重畳して表示すると共に、当該HUD表示領域35を外れた折または右折の曲がり角に対しては、それとは異なる形態の矢印352を利用して、当該HUD表示領域35の左右上下の四隅に近接して表示する。なお、ここでも、図31(a)は、右カーブにおける左折の場合のナビゲーション表示を、図31(b)は、右カーブにおける右折の場合のナビゲーション表示を、図31(c)は、左カーブにおける左折の場合のナビゲーション表示を、図31(d)は、左カーブにおける右折の場合のナビゲーション表示を、それぞれ示している。
続いて、以上に詳細に説明したナビゲーション情報の表示、すなわち、道路形状に応じてナビゲーション表示を変える動作を実行するための具体的な一例として、図32に、そのためのソフトウェアであるフローチャートを示す。
なお、このソフトウェアは、例えば、制御部20内のメモリ内に予め格納されて、上記図7における表示映像の変更・決定(S23)の処理において、ECU21(例えば、図3~5を参照)により実行されるものである。
図32に示すように、まず、ECU21からのHUD通常動作を受信し(S311)、車両が左折または右折する曲がり角(「左右折箇所」と言う)までの距離が、所定の閾値未満であるか否かを判定する(S312)。その結果、「no」の場合には、S311のHUD通常動作へ戻る(S313)。なお、ここで所定の閾値とは、例えば、自車両のから左右折箇所までの距離であり、道路に重畳したナビゲーション表示を行うための距離であり、その一例として、100mに設定されている。換言すれば、左右折箇所までの距離が80mの場合には、当該左右折箇所のナビゲーション表示が行われ、120mの場合には、そのナビゲーション表示は行われないこととなる。
他方、上記S312の判定の結果が「yes」の場合、すなわち、ナビゲーション表示を行う場合には、さらに、左右折箇所の鉛直方向の位置が、上述したHUD表示領域内にあるか否かの判定を行う(S314)。ここで、左右折箇所の鉛直方向の位置とは、上記図21~31にも図示したように、車両2のウィンドシールド3の略中央部に配置されたHUD表示領域35内における当該左右折箇所の位置を意味しており、いわゆる、縦方向の位置を言う。
このS314での判定の結果、「yes」、すなわち、HUD表示領域内にある(例えば、図21、22を参照)とされた場合には、さらに、左右折箇所が道路の凸形状によって目視できない位置にあるか否かを判定する(S315)。このS315での判定の結果も、「yes」、すなわち、左右折箇所が道路の凸形状によって目視できない位置にある(例えば、図25、30を参照)と判定された場合には、さらに、左右折箇所がHUD表示領域よりも左、もしくは、右にあるか否かを判定する(S316)。そして、その結果も、「yes」、すなわち、左右折箇所がHUD表示領域の外部にあると判定された場合には、例えば、上記図30に示す対策(但し、曲がり角の高さがHUD表示領域の略中央部である点で異なる)を実施する(S317)。他方、当該判定の結果、「no」、すなわち、左右折箇所がHUD表示領域の内部にあると判定された場合には、上記図26の対策を実施する(S318)。
一方、上記S315の判定の結果、「no」、すなわち、道路の凸形状に関わらず、左右折箇所が目視できる場合には、上記S316と同様に、左右折箇所がHUD表示領域よりも左、もしくは、右にあるか否かを判定する(S319)。その結果、「yes」、すなわち、左右折箇所がHUD表示領域の外部にあると判定された場合には、上記図29の対策を実施する(S320)。他方、「no」、すなわち、左右折箇所がHUD表示領域の内部にあると判定された場合には、上記図21に示した通常表示を実施する(S321)。
さらに、上記S314の判定の結果、「no」、すなわち、HUD表示領域内にはない(例えば、図23~31を参照)とされた場合には、さらに、左右折箇所がHUD表示領域の下端よりも下にあるか否かを判定する(S322)。その結果、「yes」、すなわち、左右折箇所がHUD表示領域の下方にあると判定された場合には、さらに、左右折箇所がHUD表示領域よりも左、もしくは、右にあるか否かを判定する(S323)。その結果、「yes」とされた場合には、上記図30に示した対処表示を実施する(S324)。他方、「no」と判定された場合には、上記図27に示した通常表示を実施する(S325)。
また、上記S322の判定の結果、「no」、すなわち、左右折箇所がHUD表示領域の上方にあると判定された場合には、さらに、左右折箇所がHUD表示領域よりも左、もしくは、右にあるか否かを判定する(S326)。その結果、「yes」とされた場合には、上記図31に示した対処表示を実施する(S327)。他方、「no」と判定された場合には、上記図28に示した通常表示を実施する(S328)。
すなわち、上述したフローチャートの処理によれば、道路形状に応じてナビゲーション表示の形態(HUD表示領域内における水平方向や垂直方向の位置を含む)を変えることにより、車両の走行状況に応じた虚像を、実際の風景に適切に重畳させるよう表示することが可能なヘッドアップディスプレイ装置を実現することができる。
なお、上記の実施例において、ウィンドシールド3内において種々に変化する道路形状については、上述した車両情報4の中で、図1のナビゲーション情報から道路の勾配情報を取り込んだり、図3のカメラ(車外)116から車両前方の映像情報を取り込んだり、さらには、図示しないが、運転者の眼(すなわち、アイポイント)の近傍に車両前方に向けて設けたカメラからの映像情報を取り込んで画像解析する等の手法により実現可能であることは、当業者にとっては当然であろう。
<ナビゲーション情報表示の単眼視/両眼視制御>
続いて、上述した道路形状に応じた変更するナビゲーション表示に加えて、さらに、アイボックスの面積/形状を制御し、両眼視/単眼視の切り替えを行う実施例について、以下に図33~36を参照しながら、詳細に説明する。
続いて、上述した道路形状に応じた変更するナビゲーション表示に加えて、さらに、アイボックスの面積/形状を制御し、両眼視/単眼視の切り替えを行う実施例について、以下に図33~36を参照しながら、詳細に説明する。
なお、アイボックスとは、HUDの映像表示を視認できる視点の範囲をあらわしており、図34にも示す通り、ダッシュボード上面に配置された機能性液晶フィルム401により左右のエリアに分かれて個別に制御が可能である。例えば、好適の判定により、単眼視が好適で且つ単眼視が右眼に設定されている場合は、図34(a)に示すように機能性液晶フィルムの右側半分を白色状態にする。この映像光の遮断により、結果として、右眼にしか映像光が投射されず、右側の単眼で見ることができることとなる。なお、図33では、このアイボックスを、運転者の両眼5の直前の位置に破線73で示している。
この実施例では、図33にも示すように、運転者は、プロジェクタ30aから投射された映像光は、各種の光学部品41c、42aを通して、ミラー52に反射され、さらには、上述した機能性液晶フィルム401を通り、その後、ウィンドシールド3上で反射されたナビゲーション表示の映像光が運転者の眼に投射される。このことにより、運転者は、当該ナビゲーション表示をウィンドシールド3の前方において虚像として認識することが可能となる。なお、この実施例では、映像光を遮断するために機能性液晶フィルムの半分を白色状態にする例を示したが、不透過となっていればよく、その他、グレーなどの色であってもよい。
ところで、一般に、3D映像を見る(または、鑑賞)する場合には、以下のことが指摘されている。すなわち、(1)部屋を明るくして鑑賞すると、映像酔いが軽減される場合があること。(2)融合限界というものが存在し、視差をある程度以上に大きくすると右眼と左眼の画像が融合せず、2重像がみえてしまい、立体視ができなくなること。(3)両眼が表示面に対して斜めになっていると、左右の眼に映る映像の上下の差異が大きくなり、融合が困難となり、眼精疲労を引き起こすこと。
さらには、(4)VDT(Visual Display Terminals)作業に立体映像を用いる場合の留意点として、特に、以下の事柄が指摘されている。すなわち、(4-1)一連の作業時間は1時間を超えないようにすること。(4-2)連続作業と連続作業との間には、10~15分程度の作業休止時間を設けること。(4-3)一連の作業時間内において、1~2回程度の小休止を設けること。
そこで、上記の事柄を考慮して本発明になるヘッドアップディスプレイ装置においては、特に、そのナビゲーション情報の表示において、機能性液晶フィルム401の制御によってアイボックス73のサイズ/形状の切り替え、すなわち、左右いずれかの眼による単眼視(図34(a)または(b)を参照)と左右両眼による両眼視(図34(c)を参照)を切替え制御する(以下では、「単眼視/両眼視制御」と言う)ことにより、ウィンドシールド3の前方のHUD表示領域35内に3D表示される虚像を連続して見続けることとなる運転者への負担を軽減するための対策について検討した。
検討の結果、アイボックスのサイズ/形状を切り替えるシーン(条件)としては、以下の候補が挙げられた。
・虚像距離(≒対象物距離)が遠方(または、近傍)である場合。
・運転者の顔の傾きが所定の閾値を越える場合。
・連続運転時間が所定の閾値を越える場合。
・車室内の明るさが所定の閾値に満たない場合。
・視差映像の品質を保つのが困難な場合(例えば、HUD表示領域35を上下に調整することで、ウィンドシールドの曲率の大きな面で反射した虚像を見る場合など、虚像距離調節が間に合わない等の場合)。
・対象物距離に合わせた距離感での虚像表示が不可能(例えば、調整可能域外である、距離の異なる対象物の数が、独立した虚像距離調整の数を超える等)な場合。
・虚像距離(≒対象物距離)が遠方(または、近傍)である場合。
・運転者の顔の傾きが所定の閾値を越える場合。
・連続運転時間が所定の閾値を越える場合。
・車室内の明るさが所定の閾値に満たない場合。
・視差映像の品質を保つのが困難な場合(例えば、HUD表示領域35を上下に調整することで、ウィンドシールドの曲率の大きな面で反射した虚像を見る場合など、虚像距離調節が間に合わない等の場合)。
・対象物距離に合わせた距離感での虚像表示が不可能(例えば、調整可能域外である、距離の異なる対象物の数が、独立した虚像距離調整の数を超える等)な場合。
以上に加えて、さらに、
・直線日光を避けるようアイボックスのサイズ/形状を変更する(不使用時は、全域を非透明化し、HUD内部の外光による加熱や表示画面による外光の反射を防止する)。
・直線日光を避けるようアイボックスのサイズ/形状を変更する(不使用時は、全域を非透明化し、HUD内部の外光による加熱や表示画面による外光の反射を防止する)。
次に、以上に述べた発明者らによる検討の結果に基づく、上記単眼視/両眼視制御を含むアイボックス制御の具体的な内容について、図35および図36を参照しながら、詳細に説明する。
図35には、アイボックス制御の処理内容であるフローチャートが示されており、まず、アイボックス制御処理が開始すると、以下に詳細を示す単眼視/両眼視好適判定処理の判定結果を取り込む(S260)。
続いて、上記の判定結果に基づいて、単眼視が好適であるか否かを判定する(S261)。この判定の結果、「Yes」の場合には、さらに、単眼視は右眼に設定されているか否かを判定する(S262)。その結果、「Yes」と判定された場合には、左眼がアイボックスから外れるようにアイボックスを変更(S263:図34(a)を参照)して、一連の処理を終了する。他方、S262の判定の結果、「No」の場合には、右眼がアイボックスから外れるようにアイボックスを変更(S264:図34(b)を参照)して、一連の処理を終了する。
一方、上記S261の判定の結果、「No」の場合には、アイボックスサイズが最大になるようアイボックスを変更(S265:図34(c)を参照)して、一連の処理を終了する。
次に、上述した単眼視/両眼視好適判定処理(S260)の詳細内容について、図36を参照しながら詳細に説明する。
単眼視/両眼視好適判定処理が開始すると、まず、実景(すなわち、ウィンドシールド越しに見える風景)と虚像(すなわち、ウィンドシールド越しに見えるナビゲーション表示)の距離の差が規定値以上であるか否かを判定する(S270)。その結果、「Yes」と判定された場合には、好適に単眼を設定して(S271)、一連の処理を終了する。なお、上記の記載からも明らかなように、この設定は、図35においてS260で示した処理において、単眼視/両眼視好適判定処理の判定結果として、取り込まれる。
一方、上記S270の判定処理の結果、「No」と判定された場合には、さらに、運転者の頭の傾きが規定値以上であるか否かを判定する(S272)。その結果、「Yes」の場合には、上記のS271において好適に単眼を設定して(S271)、一連の処理を終了する。
他方、上記S272の判定処理の結果、「No」と判定された場合には、さらに、両眼視の連続時間が規定値以上か否かを判定する(S273)。その結果、「Yes」の場合には、上記S271において好適に単眼を設定して(S271)、一連の処理を終了する。
他方、上記S273の判定処理の結果、「No」と判定された場合には、さらに、車室内の明るさが規定値以上であるか否かを判定する(S274)。その結果、「Yes」の場合には、上記と同様に、好適に単眼を設定して(S271)、一連の処理を終了する。
他方、上記S274の判定処理の結果、「No」と判定された場合には、さらに、虚像反射部分のフロントガラス(ウィンドシールド)の曲率が規定値以上か否かを判定する(S275)。その結果、「Yes」の場合には、好適に単眼を設定して(S271)、一連の処理を終了する。他方、このS275の判定処理の結果、「No」と判定された場合には、好適に両眼を設定して(S276)、一連の処理を終了する。なお、この設定も、図35においてS260で示した処理において、単眼視/両眼視好適判定処理の判定結果として、取り込まれる。
なお、上記の判定処理において、例えば、実景の距離や運転者の頭の傾き、さらには、車室内の明るさについては、上記図3にも示す車両情報の取得デバイスである、例えば、カメラ(車内)115やカメラ(車外)116等を利用することによれば、容易に求めることが可能であることは、当業者にとっては明らかであろう。
以上からも明らかなように、上述したナビゲーション情報表示の単眼視/両眼視制御によれば、長時間の運転においても、運転者への負担を軽減することが可能なナビゲーション情報表示を行うことができるヘッドアップディスプレイ装置を実現することが可能となる。
なお、上述したナビゲーション情報表示の単眼視/両眼視制御を実行するためのソフトウェアも、上記と同様に、例えば、本発明になるヘッドアップディスプレイ装置を構成する制御部20内のメモリ内に予め格納され、ECU21(例えば、図3~5を参照)により実行されることとなる。
以上、本発明者によってなされた発明を実施の形態に基づき具体的に説明したが、本発明は上記の実施の形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能であることはいうまでもない。例えば、上記の実施の形態は本発明を分かりやすく説明するために詳細に説明したものであり、必ずしも説明した全ての構成を備えるものに限定されるものではない。また、上記の実施の形態の構成の一部について、他の構成の追加・削除・置換をすることが可能である。
本発明は、ARを利用したヘッドアップディスプレイ装置に利用可能である。
1…AR-HUD、2…車両、3…ウィンドシールド、4…車両情報、5…運転者、6…表示領域、
10…車両情報取得部、
20…制御部、21…ECU、22…音声出力部、23…不揮発性メモリ、24…メモリ、25…光源調整部、26…歪み補正部、27…表示素子駆動部、28…表示距離調整部、29…ミラー調整部、
30…映像表示装置、30a…プロジェクタ、30b…LCD、31…光源、32…照明光学系、33…表示素子、35…HUD表示領域、351…ナビゲーション表示(矢印)、352…異なる形態の矢印、
40…表示距離調整機構、41a…拡散板、41b…拡散板、41c…可動式拡散板、42a…レンズ、42b…可動式レンズ、43a…可動式光学フィルタ、43b…くし状光学フィルタ、
50…ミラー駆動部、51…ミラー、51a…ミラー、51b…調光ミラー、52…ミラー、
60…スピーカ、
101…車速センサ、102…シフトポジションセンサ、103…ハンドル操舵角センサ、104…ヘッドライトセンサ、105…照度センサ、106…色度センサ、107…測距センサ、108…赤外線センサ、109…エンジン始動センサ、110…加速度センサ、111…ジャイロセンサ、112…温度センサ、113…路車間通信用無線受信機、114…車車間通信用無線受信機、115…カメラ(車内)、116…カメラ(車外)、117…GPS受信機、118…VICS受信機、
281…機能性液晶フィルムON/OFF制御部、282…レンズ可動部、283…調光ミラーON/OFF制御部、284…拡散板可動部、285…光学フィルタ可動部、
401…機能性液晶フィルム、402…レンズ可動機構、403…調光ミラー、404…拡散板可動機構、405…光学フィルタ可動機構。
10…車両情報取得部、
20…制御部、21…ECU、22…音声出力部、23…不揮発性メモリ、24…メモリ、25…光源調整部、26…歪み補正部、27…表示素子駆動部、28…表示距離調整部、29…ミラー調整部、
30…映像表示装置、30a…プロジェクタ、30b…LCD、31…光源、32…照明光学系、33…表示素子、35…HUD表示領域、351…ナビゲーション表示(矢印)、352…異なる形態の矢印、
40…表示距離調整機構、41a…拡散板、41b…拡散板、41c…可動式拡散板、42a…レンズ、42b…可動式レンズ、43a…可動式光学フィルタ、43b…くし状光学フィルタ、
50…ミラー駆動部、51…ミラー、51a…ミラー、51b…調光ミラー、52…ミラー、
60…スピーカ、
101…車速センサ、102…シフトポジションセンサ、103…ハンドル操舵角センサ、104…ヘッドライトセンサ、105…照度センサ、106…色度センサ、107…測距センサ、108…赤外線センサ、109…エンジン始動センサ、110…加速度センサ、111…ジャイロセンサ、112…温度センサ、113…路車間通信用無線受信機、114…車車間通信用無線受信機、115…カメラ(車内)、116…カメラ(車外)、117…GPS受信機、118…VICS受信機、
281…機能性液晶フィルムON/OFF制御部、282…レンズ可動部、283…調光ミラーON/OFF制御部、284…拡散板可動部、285…光学フィルタ可動部、
401…機能性液晶フィルム、402…レンズ可動機構、403…調光ミラー、404…拡散板可動機構、405…光学フィルタ可動機構。
Claims (11)
- 車両のウィンドシールドに映像を投射することで、運転者に対して前記車両の前方の風景に重畳させて虚像を表示するヘッドアップディスプレイ装置であって、
前記車両が検知することができる各種の車両情報を取得する車両情報取得部と、
前記車両情報取得部が取得した前記車両情報に基づいて、前記映像の表示を制御する制御部と、
前記制御部からの指示に基づいて前記映像を形成する映像表示装置と、
前記映像表示装置が形成した前記映像を反射して前記ウィンドシールドに投射するミラーと、
前記制御部からの指示に基づいて前記ミラーの角度を変化させるミラー駆動部と、
前記運転者に対する前記虚像の表示距離を調整する表示距離調整機構と、を有し、
前記制御部は、前記車両情報に基づいて、前記運転者に対して前記風景に前記虚像を重畳させて表示することが可能となるよう、前記ミラー駆動部を介して前記ミラーの角度を調整する、ヘッドアップディスプレイ装置。 - 請求項1に記載のヘッドアップディスプレイ装置において、
前記制御部は、
前記車両情報取得部から前記車両情報として前方の道路の第1の勾配に係る情報と、現在地の道路の第2の勾配に係る情報とを取得し、
前記第1の勾配の方が前記第2の勾配より所定の閾値以上大きい場合は、前記虚像の表示位置が上方向に移動するよう、前記ミラー駆動部を介して前記ミラーの角度を調整し、
前記第2の勾配の方が前記第1の勾配より所定の閾値以上大きい場合は、前記虚像の表示位置が下方向に移動するよう、前記ミラー駆動部を介して前記ミラーの角度を調整する、ヘッドアップディスプレイ装置。 - 請求項2に記載のヘッドアップディスプレイ装置において、
前記制御部は、前記第1の勾配の方が前記第2の勾配より所定の閾値以上大きい状態、もしくは前記第2の勾配の方が前記第1の勾配より所定の閾値以上大きい状態が、所定の時間以上継続した場合にのみ、前記ミラー駆動部を介して前記ミラーの角度を調整する、ヘッドアップディスプレイ装置。 - 請求項1に記載のヘッドアップディスプレイ装置において、
前記制御部は、
前記車両情報取得部から前記車両情報として前記車両の速度に係る情報を取得し、
前記速度が所定の閾値より大きい場合は、前記虚像の表示位置が上方向に移動するよう、前記ミラー駆動部を介して前記ミラーの角度を調整する、ヘッドアップディスプレイ装置。 - 請求項1に記載のヘッドアップディスプレイ装置において、
前記制御部は、
前記車両情報取得部から前記車両情報として前記運転者の眼の高さ位置に係る情報を取得し、
前記高さ位置が所定の閾値より高い場合は、前記虚像の表示位置が上方向に移動するよう、前記ミラー駆動部を介して前記ミラーの角度を調整し、
前記高さ位置が所定の閾値より低い場合は、前記虚像の表示位置が下方向に移動するよう、前記ミラー駆動部を介して前記ミラーの角度を調整する、ヘッドアップディスプレイ装置。 - 請求項1に記載のヘッドアップディスプレイ装置において、
前記制御部は、
前記車両情報取得部から前記車両情報として前記車両の振動量に係る情報を取得し、
前記振動量に応じて、前記映像の表示領域内で前記映像をオフセットさせる、ヘッドアップディスプレイ装置。 - 請求項1に記載のヘッドアップディスプレイ装置において、
前記制御部は、さらに、前記風景に前記虚像として重畳させて表示されるナビゲーション情報を、その表示領域内において、道路形状に応じて異なる表示形態で表示させる、ヘッドアップディスプレイ装置。 - 請求項7に記載のヘッドアップディスプレイ装置において、前記道路形状に応じて異なる表示形態とは、前記表示領域内における位置を含んでいる、ヘッドアップディスプレイ装置。
- 請求項1に記載のヘッドアップディスプレイ装置において、
前記制御部は、さらに、前記風景に前記虚像として重畳させて表示されるナビゲーション情報を、所定の条件に基づいて、単眼視/両眼視制御を行って表示させる、ヘッドアップディスプレイ装置。 - 請求項9に記載のヘッドアップディスプレイ装置において、さらに、前記映像表示装置と前記ウィンドシールドとの間に、アイボックスのサイズ/形状を変更する手段を備えており、
前記制御部の単眼視/両眼視制御を、前記アイボックスのサイズまたは形状を変更することにより実行する、ヘッドアップディスプレイ装置。 - 請求項10に記載のヘッドアップディスプレイ装置において、前記アイボックスのサイズ/形状を変更する手段は、前記車両のダッシュボード上に配置された機能性液晶フィルムである、ヘッドアップディスプレイ装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017565393A JP6717856B2 (ja) | 2016-02-05 | 2016-10-20 | ヘッドアップディスプレイ装置 |
| US16/071,518 US10866415B2 (en) | 2016-02-05 | 2016-10-20 | Head-up display apparatus |
| CN201680077971.3A CN108473054B (zh) | 2016-02-05 | 2016-10-20 | 平视显示器装置 |
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016-020471 | 2016-02-05 | ||
| JP2016020471 | 2016-02-05 | ||
| JP2016053181 | 2016-03-17 | ||
| JP2016-053181 | 2016-03-17 | ||
| JP2016-054581 | 2016-03-18 | ||
| JP2016054581 | 2016-03-18 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017134865A1 true WO2017134865A1 (ja) | 2017-08-10 |
Family
ID=59500693
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/081124 WO2017134865A1 (ja) | 2016-02-05 | 2016-10-20 | ヘッドアップディスプレイ装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10866415B2 (ja) |
| JP (1) | JP6717856B2 (ja) |
| CN (1) | CN108473054B (ja) |
| WO (1) | WO2017134865A1 (ja) |
Cited By (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108896067A (zh) * | 2018-03-23 | 2018-11-27 | 江苏泽景汽车电子股份有限公司 | 一种用于车载ar导航的动态显示方法及装置 |
| CN108896066A (zh) * | 2018-03-23 | 2018-11-27 | 江苏泽景汽车电子股份有限公司 | 一种增强现实抬头显示器及其导航实现方法 |
| KR20190080749A (ko) * | 2017-12-28 | 2019-07-08 | 도요타지도샤가부시키가이샤 | 차량 탑재 통신 장치 및 차량 |
| EP3264160B1 (en) * | 2016-03-24 | 2019-08-28 | Panasonic Intellectual Property Management Co., Ltd. | Headup display device and vehicle |
| JP2019156153A (ja) * | 2018-03-13 | 2019-09-19 | パイオニア株式会社 | 表示制御装置 |
| DE102019107659A1 (de) | 2018-03-30 | 2019-10-02 | Panasonic Intellectual Property Management Co., Ltd. | Anzeigesystem, bewegliches Fahrzeug, Verfahren zur Steuerung des Anzeigesystems und Programm |
| CN110636271A (zh) * | 2018-06-21 | 2019-12-31 | 瑞萨电子株式会社 | 半导体器件和消息图像输出方法 |
| WO2020009219A1 (ja) * | 2018-07-05 | 2020-01-09 | 日本精機株式会社 | ヘッドアップディスプレイ装置 |
| WO2020009217A1 (ja) * | 2018-07-05 | 2020-01-09 | 日本精機株式会社 | ヘッドアップディスプレイ装置 |
| WO2020009218A1 (ja) * | 2018-07-05 | 2020-01-09 | 日本精機株式会社 | ヘッドアップディスプレイ装置 |
| JP2020067460A (ja) * | 2018-10-19 | 2020-04-30 | 本田技研工業株式会社 | 表示装置、表示制御方法、およびプログラム |
| FR3090138A1 (fr) * | 2018-12-17 | 2020-06-19 | Psa Automobiles Sa | Procédé et dispositif de réglage de la luminance d’un afficheur tête haute embarqué dans un véhicule |
| CN111433067A (zh) * | 2017-11-14 | 2020-07-17 | 麦克赛尔株式会社 | 平视显示装置及其显示控制方法 |
| WO2020195625A1 (ja) * | 2019-03-25 | 2020-10-01 | ソニー株式会社 | 情報処理装置、情報処理方法、及び情報処理プログラム |
| WO2020209298A1 (ja) * | 2019-04-11 | 2020-10-15 | パナソニックIpマネジメント株式会社 | 勾配変化検出システム、それを用いた表示システム及び移動体用プログラム |
| CN111801239A (zh) * | 2018-03-02 | 2020-10-20 | 松下知识产权经营株式会社 | 显示系统 |
| WO2021175547A1 (de) * | 2020-03-05 | 2021-09-10 | Daimler Ag | Verfahren zur darstellung eines einen bildbereich überlagernden navigationshinweises und ein assistenzsystem eines fahrzeuges |
| WO2021251116A1 (ja) * | 2020-06-08 | 2021-12-16 | パナソニックIpマネジメント株式会社 | 表示システム |
| EP3967538A1 (de) * | 2020-09-09 | 2022-03-16 | Volkswagen Ag | Verfahren zur darstellung eines virtuellen elements |
| WO2023176897A1 (ja) * | 2022-03-16 | 2023-09-21 | 株式会社小糸製作所 | 画像投影装置、および画像投影方法 |
| US20240012240A1 (en) * | 2021-01-22 | 2024-01-11 | Bayerische Motoren Werke Aktiengesellschaft | Waveguide-Based Projection Display Device With a Dynamic Scattered Light Absorber for a Vehicle |
| JP7555662B2 (ja) | 2021-03-30 | 2024-09-25 | パナソニックオートモーティブシステムズ株式会社 | 表示補正システム、表示システム、表示補正方法、及びプログラム |
Families Citing this family (60)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12112464B2 (en) * | 2014-09-17 | 2024-10-08 | Gary B. Levin | Apparatus and method for onboard stereoscopic inspection of vehicle tires |
| US11119315B2 (en) * | 2015-10-15 | 2021-09-14 | Maxell, Ltd. | Information display apparatus |
| JP6629889B2 (ja) * | 2016-02-05 | 2020-01-15 | マクセル株式会社 | ヘッドアップディスプレイ装置 |
| JP6695049B2 (ja) * | 2017-05-10 | 2020-05-20 | パナソニックIpマネジメント株式会社 | 表示装置及び表示制御方法 |
| US11106917B2 (en) * | 2017-07-04 | 2021-08-31 | Turing Video | Surveillance system with human-machine interface |
| US20190012552A1 (en) * | 2017-07-06 | 2019-01-10 | Yves Lambert | Hidden driver monitoring |
| KR20190012068A (ko) * | 2017-07-26 | 2019-02-08 | 삼성전자주식회사 | 전방 표시 장치 및 그 동작 방법 |
| KR102397089B1 (ko) * | 2017-07-28 | 2022-05-12 | 삼성전자주식회사 | 이미지 처리 방법 및 이미지 처리 장치 |
| JP6839806B2 (ja) * | 2017-09-21 | 2021-03-10 | パナソニックIpマネジメント株式会社 | ヘッドアップディスプレイ装置、及び車両 |
| KR102547823B1 (ko) * | 2017-12-13 | 2023-06-26 | 삼성전자주식회사 | 컨텐츠 시각화 장치 및 방법 |
| JP6938367B2 (ja) * | 2017-12-28 | 2021-09-22 | アルパイン株式会社 | 車載システム |
| CN108152959B (zh) * | 2018-01-02 | 2020-08-07 | 京东方科技集团股份有限公司 | 车载抬头显示系统 |
| CN108399903B (zh) * | 2018-03-27 | 2020-11-27 | 京东方科技集团股份有限公司 | 一种成像位置的调节方法及装置、平视显示系统 |
| US11719932B2 (en) | 2018-07-13 | 2023-08-08 | Maxell, Ltd. | Head-up display |
| JP7241081B2 (ja) | 2018-08-06 | 2023-03-16 | 株式会社小糸製作所 | 車両用表示システム及び車両 |
| JP7203330B2 (ja) * | 2018-08-08 | 2023-01-13 | パナソニックIpマネジメント株式会社 | ヘッドアップディスプレイ |
| JP1632766S (ja) * | 2018-09-10 | 2019-06-03 | ||
| KR102116783B1 (ko) * | 2018-10-10 | 2020-05-29 | 네이버랩스 주식회사 | 영상을 지면에 위치시켜 운전자의 시점에 증강현실을 구현하는 3차원 증강현실 헤드업 디스플레이 |
| KR102673292B1 (ko) * | 2018-10-11 | 2024-06-10 | 현대자동차주식회사 | 차량의 표시 제어 장치 및 방법 |
| KR20200045359A (ko) * | 2018-10-22 | 2020-05-04 | 삼성전자주식회사 | 투시형 디스플레이 장치 |
| WO2020090512A1 (ja) * | 2018-10-31 | 2020-05-07 | ソニー株式会社 | 撮影装置、制御方法、及び、プログラム |
| KR20200072641A (ko) * | 2018-12-12 | 2020-06-23 | 삼성전자주식회사 | 3차원 증강 현실을 제공하는 헤드 업 디스플레이 장치 |
| CN109584596A (zh) * | 2018-12-20 | 2019-04-05 | 奇瑞汽车股份有限公司 | 车辆驾驶提示方法及装置 |
| EP3677961A3 (en) * | 2019-01-02 | 2020-07-22 | Visteon Global Technologies, Inc. | Curved segmented active dimmable lens for a display system |
| KR102648818B1 (ko) * | 2019-01-29 | 2024-03-19 | 현대자동차주식회사 | 차량용 인포테인먼트 장치 및 그의 제어 방법과 그를 포함하는 차량 |
| JP7079747B2 (ja) * | 2019-03-08 | 2022-06-02 | 本田技研工業株式会社 | 表示装置、表示制御方法、およびプログラム |
| CN110161695A (zh) * | 2019-05-17 | 2019-08-23 | 中国科学院光电技术研究所 | 一种成像距离可变的汽车平视显示光学结构 |
| WO2020235160A1 (ja) * | 2019-05-22 | 2020-11-26 | パナソニックIpマネジメント株式会社 | 表示システム |
| JP7450230B2 (ja) | 2019-05-29 | 2024-03-15 | パナソニックIpマネジメント株式会社 | 表示システム |
| EP3978290A4 (en) * | 2019-05-31 | 2022-08-03 | Panasonic Intellectual Property Management Co., Ltd. | DISPLAY SYSTEM |
| DE102019208649B3 (de) * | 2019-06-13 | 2020-01-02 | Volkswagen Aktiengesellschaft | Steuerung einer Anzeige einer Augmented-Reality-Head-up-Display-Vorrichtung für ein Kraftfahrzeug |
| US10908418B1 (en) * | 2019-07-29 | 2021-02-02 | E-Lead Electronic Co., Ltd. | Naked eye 3D head-up display device with reflective diffuser sheet |
| JP7287867B2 (ja) * | 2019-08-30 | 2023-06-06 | トヨタ自動車株式会社 | 車載用制御装置 |
| JP7120982B2 (ja) * | 2019-11-11 | 2022-08-17 | 株式会社Soken | 表示制御装置 |
| KR20210087271A (ko) * | 2020-01-02 | 2021-07-12 | 삼성전자주식회사 | 3d 증강 현실 내비게이션 정보 표시 방법 및 장치 |
| CN113109941B (zh) * | 2020-01-10 | 2023-02-10 | 未来(北京)黑科技有限公司 | 一种分层成像的抬头显示系统 |
| CN113109940A (zh) * | 2020-01-10 | 2021-07-13 | 未来(北京)黑科技有限公司 | 一种高亮度的抬头显示系统 |
| CN113103955B (zh) * | 2020-01-10 | 2024-06-18 | 未来(北京)黑科技有限公司 | 一种多层次成像系统 |
| CN113109939B (zh) * | 2020-01-10 | 2023-11-14 | 未来(北京)黑科技有限公司 | 一种多层次成像系统 |
| CN111256704B (zh) * | 2020-01-21 | 2022-06-10 | 华为技术有限公司 | 一种折叠屏的导航方法及相关装置 |
| CN113156643B (zh) * | 2020-01-22 | 2023-08-15 | 未来(北京)黑科技有限公司 | 基于立体视觉显示的车辆显示系统 |
| CN115087566A (zh) * | 2020-02-20 | 2022-09-20 | 索尼集团公司 | 信息处理设备、信息处理方法和程序 |
| JP7130689B2 (ja) * | 2020-03-27 | 2022-09-05 | 矢崎総業株式会社 | 車両用表示装置 |
| JP2021154988A (ja) * | 2020-03-30 | 2021-10-07 | 株式会社豊田中央研究所 | 車載表示装置、車載表示装置を制御する方法、及びコンピュータプログラム |
| GB2593750B (en) * | 2020-04-01 | 2024-04-03 | Envisics Ltd | A multi-plane display device |
| CN111442784B (zh) * | 2020-04-03 | 2022-08-02 | 北京四维智联科技有限公司 | 一种基于ar导航的道路引导方法、装置及设备 |
| EP4163156A4 (en) * | 2020-06-08 | 2023-12-06 | Panasonic Intellectual Property Management Co., Ltd. | DISPLAY SYSTEM |
| KR20220022340A (ko) | 2020-08-18 | 2022-02-25 | 삼성전자주식회사 | 컨텐츠를 시각화하는 장치 및 방법 |
| KR20220036455A (ko) * | 2020-09-15 | 2022-03-23 | 현대자동차주식회사 | 증강현실 기반의 주행 정보 표시 장치 |
| CN112255788A (zh) * | 2020-09-29 | 2021-01-22 | 江苏泽景汽车电子股份有限公司 | 一种反射镜不翻转的hud图像调节方法 |
| US11833901B2 (en) * | 2020-10-12 | 2023-12-05 | GM Global Technology Operations LLC | System and method for adjusting a location and distortion of an image projected onto a windshield of a vehicle by a head-up display |
| DE102021101433A1 (de) * | 2021-01-22 | 2022-07-28 | Bayerische Motoren Werke Aktiengesellschaft | Head-Up-Display mit einem Spiegelkabinett zur Bauraumreduktion |
| KR20220134106A (ko) * | 2021-03-26 | 2022-10-05 | 현대자동차주식회사 | 차량용 헤드업 디스플레이 장치 및 방법 |
| US11922836B2 (en) * | 2021-03-29 | 2024-03-05 | Panasonic Intellectual Property Management Co., Ltd. | Rendering system, display system, display control system, and rendering method |
| JP2022184350A (ja) * | 2021-06-01 | 2022-12-13 | マツダ株式会社 | ヘッドアップディスプレイ装置 |
| JP7512961B2 (ja) * | 2021-06-23 | 2024-07-09 | トヨタ自動車株式会社 | 表示制御装置、表示方法及び表示プログラム |
| JP2023009653A (ja) * | 2021-07-07 | 2023-01-20 | トヨタ自動車株式会社 | 車両用表示制御装置、表示方法及びプログラム |
| CN113859122A (zh) * | 2021-09-30 | 2021-12-31 | 重庆长安新能源汽车科技有限公司 | 一种高度自适应调节的ar-hud显示方法、系统和车辆 |
| CN116413908A (zh) * | 2021-12-30 | 2023-07-11 | 未来(北京)黑科技有限公司 | 显示装置、抬头显示器以及交通设备 |
| CN114779477B (zh) * | 2022-06-17 | 2022-11-04 | 江苏泽景汽车电子股份有限公司 | 一种显示画面补偿方法、装置、电子设备及存储介质 |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0275330U (ja) * | 1988-11-30 | 1990-06-08 | ||
| JPH04109325U (ja) * | 1991-03-05 | 1992-09-22 | 株式会社カンセイ | 車両用計器 |
| JP2005035384A (ja) * | 2003-07-14 | 2005-02-10 | Nissan Motor Co Ltd | 車両用自動遮光装置 |
| JP2009113710A (ja) * | 2007-11-08 | 2009-05-28 | Denso Corp | ヘッドアップディスプレイ装置 |
| JP2009178404A (ja) * | 2008-01-31 | 2009-08-13 | Carecom Co Ltd | ナースコール子機 |
| JP2011064902A (ja) * | 2009-09-16 | 2011-03-31 | Toshiba Corp | 表示装置及び表示方法 |
| JP2011123126A (ja) * | 2009-12-08 | 2011-06-23 | Denso Corp | ヘッドアップディスプレイ装置及びヘッドアップディスプレイ装置におけるステッピングモータの駆動方法の決定方法 |
| JP2011164631A (ja) * | 2011-03-10 | 2011-08-25 | Toshiba Corp | 表示装置、表示方法及びヘッドアップディスプレイ |
| JP2013237320A (ja) * | 2012-05-14 | 2013-11-28 | Toshiba Alpine Automotive Technology Corp | 違和感軽減表示装置およびその表示制御方法 |
| JP2015080988A (ja) * | 2013-10-22 | 2015-04-27 | 日本精機株式会社 | 車両情報投影システム及び投影装置 |
| JP2015087512A (ja) * | 2013-10-30 | 2015-05-07 | アイシン・エィ・ダブリュ株式会社 | ヘッドアップディスプレイ装置 |
Family Cites Families (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH027533U (ja) | 1988-06-29 | 1990-01-18 | ||
| JPH08197981A (ja) * | 1995-01-23 | 1996-08-06 | Aqueous Res:Kk | 車輌用表示装置 |
| JP2001018682A (ja) * | 1999-07-09 | 2001-01-23 | Calsonic Kansei Corp | 車両用表示装置 |
| JP2004168230A (ja) | 2002-11-21 | 2004-06-17 | Nissan Motor Co Ltd | 車両用表示装置 |
| DE102004016808A1 (de) * | 2004-04-06 | 2005-10-27 | Robert Bosch Gmbh | Signalisiervorrichtung zur Anzeige von Warn- und/oder Informationshinweisen in Fahrzeugen |
| JP2006007867A (ja) | 2004-06-23 | 2006-01-12 | Matsushita Electric Ind Co Ltd | 車載用映像表示装置 |
| JP2007055365A (ja) | 2005-08-23 | 2007-03-08 | Denso Corp | 車両用表示装置 |
| US8269652B2 (en) * | 2009-04-02 | 2012-09-18 | GM Global Technology Operations LLC | Vehicle-to-vehicle communicator on full-windshield head-up display |
| US8704653B2 (en) * | 2009-04-02 | 2014-04-22 | GM Global Technology Operations LLC | Enhanced road vision on full windshield head-up display |
| US8817090B2 (en) * | 2009-04-02 | 2014-08-26 | GM Global Technology Operations LLC | Luminance uniformity compensation of vector projection display |
| US8912978B2 (en) * | 2009-04-02 | 2014-12-16 | GM Global Technology Operations LLC | Dynamic vehicle system information on full windshield head-up display |
| US8395529B2 (en) * | 2009-04-02 | 2013-03-12 | GM Global Technology Operations LLC | Traffic infrastructure indicator on head-up display |
| US8830141B2 (en) * | 2009-04-02 | 2014-09-09 | GM Global Technology Operations LLC | Full-windshield head-up display enhancement: anti-reflective glass hard coat |
| US8564502B2 (en) * | 2009-04-02 | 2013-10-22 | GM Global Technology Operations LLC | Distortion and perspective correction of vector projection display |
| US8358224B2 (en) * | 2009-04-02 | 2013-01-22 | GM Global Technology Operations LLC | Point of interest location marking on full windshield head-up display |
| US8629784B2 (en) * | 2009-04-02 | 2014-01-14 | GM Global Technology Operations LLC | Peripheral salient feature enhancement on full-windshield head-up display |
| US8317329B2 (en) * | 2009-04-02 | 2012-11-27 | GM Global Technology Operations LLC | Infotainment display on full-windshield head-up display |
| US8384532B2 (en) * | 2009-04-02 | 2013-02-26 | GM Global Technology Operations LLC | Lane of travel on windshield head-up display |
| US7924146B2 (en) * | 2009-04-02 | 2011-04-12 | GM Global Technology Operations LLC | Daytime pedestrian detection on full-windscreen head-up display |
| US8350724B2 (en) * | 2009-04-02 | 2013-01-08 | GM Global Technology Operations LLC | Rear parking assist on full rear-window head-up display |
| US20100253595A1 (en) * | 2009-04-02 | 2010-10-07 | Gm Global Technology Operations, Inc. | Virtual controls and displays by laser projection |
| US8384531B2 (en) * | 2009-04-02 | 2013-02-26 | GM Global Technology Operations LLC | Recommended following distance on full-windshield head-up display |
| US8344894B2 (en) * | 2009-04-02 | 2013-01-01 | GM Global Technology Operations LLC | Driver drowsy alert on full-windshield head-up display |
| US8072686B2 (en) * | 2009-04-02 | 2011-12-06 | GM Global Technology Operations LLC | UV laser beamlett on full-windshield head-up display |
| US8164543B2 (en) * | 2009-05-18 | 2012-04-24 | GM Global Technology Operations LLC | Night vision on full windshield head-up display |
| US8977489B2 (en) * | 2009-05-18 | 2015-03-10 | GM Global Technology Operations LLC | Turn by turn graphical navigation on full windshield head-up display |
| JP2012179935A (ja) * | 2011-02-28 | 2012-09-20 | Jvc Kenwood Corp | 車両用表示装置 |
| US9645579B2 (en) * | 2011-07-06 | 2017-05-09 | Peloton Technology, Inc. | Vehicle platooning systems and methods |
| CN103048786B (zh) * | 2011-10-17 | 2015-07-01 | 财团法人车辆研究测试中心 | 多光路抬头显像装置 |
| JP2014010418A (ja) | 2012-07-03 | 2014-01-20 | Yazaki Corp | 立体表示装置及び立体表示方法 |
| US9445011B2 (en) * | 2012-10-22 | 2016-09-13 | GM Global Technology Operations LLC | Dynamic rearview mirror adaptive dimming overlay through scene brightness estimation |
| EP3061642B1 (en) | 2013-10-22 | 2019-10-02 | Nippon Seiki Co., Ltd. | Vehicle information projection system, and projection device |
| JP2015200770A (ja) * | 2014-04-08 | 2015-11-12 | アイシン・エィ・ダブリュ株式会社 | ヘッドアップディスプレイ装置 |
| JP6369106B2 (ja) | 2014-04-16 | 2018-08-08 | 株式会社デンソー | ヘッドアップディスプレイ装置 |
| JP6629889B2 (ja) * | 2016-02-05 | 2020-01-15 | マクセル株式会社 | ヘッドアップディスプレイ装置 |
-
2016
- 2016-10-20 JP JP2017565393A patent/JP6717856B2/ja active Active
- 2016-10-20 WO PCT/JP2016/081124 patent/WO2017134865A1/ja active Application Filing
- 2016-10-20 US US16/071,518 patent/US10866415B2/en active Active
- 2016-10-20 CN CN201680077971.3A patent/CN108473054B/zh active Active
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0275330U (ja) * | 1988-11-30 | 1990-06-08 | ||
| JPH04109325U (ja) * | 1991-03-05 | 1992-09-22 | 株式会社カンセイ | 車両用計器 |
| JP2005035384A (ja) * | 2003-07-14 | 2005-02-10 | Nissan Motor Co Ltd | 車両用自動遮光装置 |
| JP2009113710A (ja) * | 2007-11-08 | 2009-05-28 | Denso Corp | ヘッドアップディスプレイ装置 |
| JP2009178404A (ja) * | 2008-01-31 | 2009-08-13 | Carecom Co Ltd | ナースコール子機 |
| JP2011064902A (ja) * | 2009-09-16 | 2011-03-31 | Toshiba Corp | 表示装置及び表示方法 |
| JP2011123126A (ja) * | 2009-12-08 | 2011-06-23 | Denso Corp | ヘッドアップディスプレイ装置及びヘッドアップディスプレイ装置におけるステッピングモータの駆動方法の決定方法 |
| JP2011164631A (ja) * | 2011-03-10 | 2011-08-25 | Toshiba Corp | 表示装置、表示方法及びヘッドアップディスプレイ |
| JP2013237320A (ja) * | 2012-05-14 | 2013-11-28 | Toshiba Alpine Automotive Technology Corp | 違和感軽減表示装置およびその表示制御方法 |
| JP2015080988A (ja) * | 2013-10-22 | 2015-04-27 | 日本精機株式会社 | 車両情報投影システム及び投影装置 |
| JP2015087512A (ja) * | 2013-10-30 | 2015-05-07 | アイシン・エィ・ダブリュ株式会社 | ヘッドアップディスプレイ装置 |
Cited By (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3264160B1 (en) * | 2016-03-24 | 2019-08-28 | Panasonic Intellectual Property Management Co., Ltd. | Headup display device and vehicle |
| CN111433067A (zh) * | 2017-11-14 | 2020-07-17 | 麦克赛尔株式会社 | 平视显示装置及其显示控制方法 |
| KR20190080749A (ko) * | 2017-12-28 | 2019-07-08 | 도요타지도샤가부시키가이샤 | 차량 탑재 통신 장치 및 차량 |
| KR102227103B1 (ko) | 2017-12-28 | 2021-03-12 | 도요타지도샤가부시키가이샤 | 차량 탑재 통신 장치 및 차량 |
| CN111801239A (zh) * | 2018-03-02 | 2020-10-20 | 松下知识产权经营株式会社 | 显示系统 |
| JP2019156153A (ja) * | 2018-03-13 | 2019-09-19 | パイオニア株式会社 | 表示制御装置 |
| CN108896066A (zh) * | 2018-03-23 | 2018-11-27 | 江苏泽景汽车电子股份有限公司 | 一种增强现实抬头显示器及其导航实现方法 |
| CN108896067B (zh) * | 2018-03-23 | 2022-09-30 | 江苏泽景汽车电子股份有限公司 | 一种用于车载ar导航的动态显示方法及装置 |
| CN108896067A (zh) * | 2018-03-23 | 2018-11-27 | 江苏泽景汽车电子股份有限公司 | 一种用于车载ar导航的动态显示方法及装置 |
| DE102019107659A1 (de) | 2018-03-30 | 2019-10-02 | Panasonic Intellectual Property Management Co., Ltd. | Anzeigesystem, bewegliches Fahrzeug, Verfahren zur Steuerung des Anzeigesystems und Programm |
| DE102019107659B4 (de) | 2018-03-30 | 2022-06-15 | Panasonic Intellectual Property Management Co., Ltd. | Anzeigesystem, bewegliches Fahrzeug, Verfahren zur Steuerung des Anzeigesystems und Programm |
| US10983343B2 (en) | 2018-03-30 | 2021-04-20 | Panasonic Intellectual Property Management Co., Ltd. | Display system, moving vehicle, method for controlling the display system, and non-transitory storage medium |
| CN110636271B (zh) * | 2018-06-21 | 2022-09-09 | 瑞萨电子株式会社 | 半导体器件和消息图像输出方法 |
| CN110636271A (zh) * | 2018-06-21 | 2019-12-31 | 瑞萨电子株式会社 | 半导体器件和消息图像输出方法 |
| WO2020009218A1 (ja) * | 2018-07-05 | 2020-01-09 | 日本精機株式会社 | ヘッドアップディスプレイ装置 |
| JP7338625B2 (ja) | 2018-07-05 | 2023-09-05 | 日本精機株式会社 | ヘッドアップディスプレイ装置 |
| WO2020009217A1 (ja) * | 2018-07-05 | 2020-01-09 | 日本精機株式会社 | ヘッドアップディスプレイ装置 |
| JP7375753B2 (ja) | 2018-07-05 | 2023-11-08 | 日本精機株式会社 | ヘッドアップディスプレイ装置 |
| JP7310817B2 (ja) | 2018-07-05 | 2023-07-19 | 日本精機株式会社 | ヘッドアップディスプレイ装置 |
| JPWO2020009217A1 (ja) * | 2018-07-05 | 2021-08-02 | 日本精機株式会社 | ヘッドアップディスプレイ装置 |
| JPWO2020009219A1 (ja) * | 2018-07-05 | 2021-08-12 | 日本精機株式会社 | ヘッドアップディスプレイ装置 |
| JPWO2020009218A1 (ja) * | 2018-07-05 | 2021-08-12 | 日本精機株式会社 | ヘッドアップディスプレイ装置 |
| US11370304B2 (en) | 2018-07-05 | 2022-06-28 | Nippon Seiki Co., Ltd. | Head-up display device |
| WO2020009219A1 (ja) * | 2018-07-05 | 2020-01-09 | 日本精機株式会社 | ヘッドアップディスプレイ装置 |
| US10928632B2 (en) | 2018-10-19 | 2021-02-23 | Honda Motor Co., Ltd. | Display device, display control method, and storage medium |
| JP2020067460A (ja) * | 2018-10-19 | 2020-04-30 | 本田技研工業株式会社 | 表示装置、表示制御方法、およびプログラム |
| FR3090138A1 (fr) * | 2018-12-17 | 2020-06-19 | Psa Automobiles Sa | Procédé et dispositif de réglage de la luminance d’un afficheur tête haute embarqué dans un véhicule |
| WO2020195625A1 (ja) * | 2019-03-25 | 2020-10-01 | ソニー株式会社 | 情報処理装置、情報処理方法、及び情報処理プログラム |
| WO2020209298A1 (ja) * | 2019-04-11 | 2020-10-15 | パナソニックIpマネジメント株式会社 | 勾配変化検出システム、それを用いた表示システム及び移動体用プログラム |
| JP7507439B2 (ja) | 2019-04-11 | 2024-06-28 | パナソニックIpマネジメント株式会社 | 勾配変化検出システム、それを用いた表示システム及び移動体用プログラム |
| WO2021175547A1 (de) * | 2020-03-05 | 2021-09-10 | Daimler Ag | Verfahren zur darstellung eines einen bildbereich überlagernden navigationshinweises und ein assistenzsystem eines fahrzeuges |
| WO2021251116A1 (ja) * | 2020-06-08 | 2021-12-16 | パナソニックIpマネジメント株式会社 | 表示システム |
| EP3967538A1 (de) * | 2020-09-09 | 2022-03-16 | Volkswagen Ag | Verfahren zur darstellung eines virtuellen elements |
| US20240012240A1 (en) * | 2021-01-22 | 2024-01-11 | Bayerische Motoren Werke Aktiengesellschaft | Waveguide-Based Projection Display Device With a Dynamic Scattered Light Absorber for a Vehicle |
| JP7555662B2 (ja) | 2021-03-30 | 2024-09-25 | パナソニックオートモーティブシステムズ株式会社 | 表示補正システム、表示システム、表示補正方法、及びプログラム |
| WO2023176897A1 (ja) * | 2022-03-16 | 2023-09-21 | 株式会社小糸製作所 | 画像投影装置、および画像投影方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN108473054B (zh) | 2021-05-28 |
| CN108473054A (zh) | 2018-08-31 |
| US10866415B2 (en) | 2020-12-15 |
| JPWO2017134865A1 (ja) | 2018-12-20 |
| JP6717856B2 (ja) | 2020-07-08 |
| US20190025580A1 (en) | 2019-01-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6717856B2 (ja) | ヘッドアップディスプレイ装置 | |
| CN108473055B (zh) | 平视显示器装置 | |
| CN109643021B (zh) | 平视显示装置 | |
| JP6707666B2 (ja) | ヘッドアップディスプレイ装置 | |
| JP6138634B2 (ja) | ヘッドアップディスプレイ装置 | |
| CN112292630B (zh) | 用于运行用于机动车的视野显示设备的方法 | |
| WO2014208165A1 (ja) | ヘッドアップディスプレイ装置 | |
| JP6516642B2 (ja) | 電子装置、画像表示方法および画像表示プログラム | |
| US10302953B2 (en) | Adjustable head-up display arrangement for a vehicle | |
| JP6213323B2 (ja) | ヘッドアップディスプレイ装置 | |
| WO2018167844A1 (ja) | ヘッドアップディスプレイ装置とその画像表示方法 | |
| JP6876277B2 (ja) | 制御装置、表示装置、表示方法及びプログラム | |
| JP2016109645A (ja) | 情報提供装置、情報提供方法及び情報提供用制御プログラム | |
| JP7082745B2 (ja) | 車両用表示装置 | |
| JP6196840B2 (ja) | ヘッドアップディスプレイ装置 | |
| JP6102628B2 (ja) | ヘッドアップディスプレイ装置 | |
| CN110816407A (zh) | 显示装置、显示控制方法及存储介质 | |
| CN110816268B (zh) | 显示装置、显示控制方法及存储介质 | |
| WO2020049873A1 (ja) | ヘッドアップディスプレイ装置 | |
| WO2019130860A1 (ja) | ヘッドアップディスプレイ装置、および制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16889348 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2017565393 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 16889348 Country of ref document: EP Kind code of ref document: A1 |