JP5327670B2 - 手術用立体顕微鏡 - Google Patents
手術用立体顕微鏡 Download PDFInfo
- Publication number
- JP5327670B2 JP5327670B2 JP2008557670A JP2008557670A JP5327670B2 JP 5327670 B2 JP5327670 B2 JP 5327670B2 JP 2008557670 A JP2008557670 A JP 2008557670A JP 2008557670 A JP2008557670 A JP 2008557670A JP 5327670 B2 JP5327670 B2 JP 5327670B2
- Authority
- JP
- Japan
- Prior art keywords
- imaging
- mirror surface
- surgical
- pair
- mirror
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/0816—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/0004—Microscopes specially adapted for specific applications
- G02B21/0012—Surgical microscopes
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/18—Arrangements with more than one light path, e.g. for comparing two specimens
- G02B21/20—Binocular arrangements
- G02B21/22—Stereoscopic arrangements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/20—Surgical microscopes characterised by non-optical aspects
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/64—Imaging systems using optical elements for stabilisation of the lateral and angular position of the image
- G02B27/642—Optical derotators, i.e. systems for compensating for image rotation, e.g. using rotating prisms, mirrors
Description
図1Aは、本発明の好ましい第1の実施の形態における顕微鏡システムの結像系の基本的要素の構成を通過する光路を、同構成を1つの平面において展開した状態で概略的に示し、
図1Bは、図1Aの結像系の基本的要素を上から見た上面図を概略的に示し、
図1Cは、図1Aの結像系の基本的要素の側面図を概略的に示し、
図1Dは、図1Aの結像系の基本的要素の空間的構成の斜視図を概略的に示し、
図2は、本発明の第2の実施の形態における顕微鏡システムの結像系の基本的要素の構成を通過する光路を、同構成を1つの平面において展開した状態で概略的に示し、
図3は、本発明の第3の実施の形態における顕微鏡システムの結像系の基本的要素の構成を通過する光路を概略的に示し、
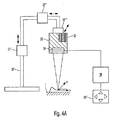
図4Aは、本発明の第2の実施の形態における顕微鏡システムの側面図を概略的に示し、
図4Bは、本発明の第4の実施の形態における顕微鏡システムの側面図を概略的に示す。
Claims (39)
- 被観察物体を配置するための物体平面に配置される前記被観察物体を結像するための手術用立体顕微鏡であって、
前記手術用立体顕微鏡は、
少なくとも一対の主ビームが前記物体平面においてゼロ度とは異なる立体視角を対として有すると共に、前記物体平面の結像フィールドを結像するための少なくとも一対の結像光路を、形成する結像系と、
前記物体平面及び前記手術用立体顕微鏡に対して、前記結像系の前記結像フィールドを並進変位させるように適合された変位装置と、
前記物体平面における前記結像フィールドの所望の変位を決定しかつ前記変位装置をこれに応じて制御するように適合された制御装置とを含み、
前記変位装置は、前記少なくとも一対の結像光路を偏向させるために前記少なくとも一対の結像光路に沿って配置された第1のミラー面であって、前記制御装置によって決定された変位に応じて旋回可能な第1のミラー面を含み、
前記変位装置は、前記少なくとも一対の結像光路を偏向させるために前記少なくとも一対の結像光路に沿って配置された第2のミラー面であって、前記制御装置によって決定された変位に応じて旋回可能な第2のミラー面をさらに含み、
前記第1のミラー面は、第1の旋回軸を中心として旋回可能であり、前記第2のミラー面は、前記第1の旋回軸とは異なる第2の旋回軸を中心として旋回可能である手術用立体顕微鏡。 - 前記第1の旋回軸は、前記第1のミラー面に衝突し、前記第1のミラー面から出射する、前記少なくとも一対の結像光路の光軸が延びる第1の偏向平面に対して、実質的に90°の角度を有し、
前記第2の旋回軸は、前記第2のミラー面に衝突し、前記第2のミラー面から出射する、前記少なくとも一対の結像光路の前記光軸が延びる第2の偏向平面に対して、実質的に90°の角度を有しかつ前記第1の偏向平面に対して実質的に平行に配置されている、請求項1に記載の手術用立体顕微鏡。 - 前記手術用立体顕微鏡は、前記結像系によって生成される前記結像フィールドの像を回転させる補償装置をさらに含み、
前記制御装置は、前記第1及び第2のミラー面のうちの少なくとも1つのミラー面の旋回に応じて前記補償装置を制御する、請求項1に記載の手術用立体顕微鏡。 - 前記結像系は、画像データを生成するために前記少なくとも一対の結像光路内に配置された少なくとも1つのカメラを含み、
前記補償装置は、前記少なくとも1つのカメラに接続されており、前記少なくとも1つのカメラによって生成される画像データを電子画像処理を用いて回転させる、請求項3に記載の手術用立体顕微鏡。 - 前記補償装置は、前記少なくとも一対の結像光路内に配置されかつ前記制御装置によって調整可能な少なくとも1つのプリズム装置を含む、請求項3に記載の手術用立体顕微鏡。
- 被観察物体を配置するための物体平面に配置される前記被観察物体を結像するための手術用立体顕微鏡であって、
前記手術用立体顕微鏡は、
少なくとも一対の主ビームが前記物体平面においてゼロ度とは異なる立体視角を対として有すると共に、前記物体平面の結像フィールドを結像するための少なくとも一対の結像光路を、形成する結像系と、
前記物体平面及び前記手術用立体顕微鏡に対して、前記結像系の前記結像フィールドを並進変位させるように適合された変位装置と、
前記物体平面における前記結像フィールドの所望の変位を決定しかつ前記変位装置をこれに応じて制御するように適合された制御装置とを含み、
前記変位装置は、前記少なくとも一対の結像光路を偏向させるために前記少なくとも一対の結像光路に沿って配置された少なくとも一対の第1及び第2のミラー面を含み、前記少なくとも一対の結像光路は、前記第1及び第2のミラー面において順次反射され、
前記第1のミラー面は、第1の旋回軸を中心として旋回可能であり、前記第1の旋回軸は、前記第1のミラー面に衝突し、前記第1のミラー面から出射する、前記少なくとも一対の結像光路の光軸が延びる第1の偏向平面に対して実質的に90°の角度を有し、
前記第2のミラー面は、第2の旋回軸を中心として旋回可能であり、前記第2の旋回軸は、前記第2のミラー面に衝突し、前記第2のミラー面から出射する、前記少なくとも一対の結像光路の前記光軸が延びる前記第2の偏向平面に対して、実質的に90°の角度を有し、前記第2の旋回軸は、前記第1の偏向平面に対して実質的に平行に配置されている手術用立体顕微鏡。 - 前記手術用立体顕微鏡は、前記物体平面における前記結像フィールドの所望の変位を決定し、かつ、決定された変位に応じて前記第1及び第2のミラー面を前記それぞれの第1及び第2の旋回軸のうちの少なくとも1つの旋回軸を中心として旋回させるように適合された制御装置をさらに含む、請求項6に記載の手術用立体顕微鏡。
- 前記結像系は、画像データを生成するために前記少なくとも一対の結像光路内に配置された少なくとも1つのカメラを含み、
前記制御装置は、前記少なくとも1つのカメラに接続されており、前記画像データにおけるマーカーの位置を検出しかつ前記マーカーの検出された位置に応じて、前記変位装置を制御するようにさらに適合されている、請求項1に記載の手術用立体顕微鏡。 - 前記制御装置は、前記画像データにおける前記マーカーの位置が実質的に一定となるように、前記変位装置を自動的に制御する、請求項8に記載の手術用立体顕微鏡。
- 前記制御装置は、ユーザインタフェースを含み、前記ユーザインタフェースを介して受け付けた制御コマンドにしたがって、前記物体平面における前記結像フィールドの所望の変位を決定する、請求項1又は7に記載の手術用立体顕微鏡。
- 前記ユーザインタフェースは、ユーザによる制御コマンドを、前記ユーザの声及び目の動き及び足の動き及び頭の動き及び手の動きのうちの少なくとも1つとして受け付け、それを前記制御装置に出力するように適合されている、請求項10に記載の手術用立体顕微鏡。
- 前記結像系は、複数の光学レンズを含み、
前記結像系の少なくとも1つの光学レンズは、前記第1及び第2のミラー面間に配置されている、請求項1に記載の手術用立体顕微鏡。 - 前記結像系は、前記少なくとも一対の結像光路を偏向させるための第3のミラー面及び第4のミラー面を含み、
前記少なくとも一対の結像光路は、前記第1のミラー面、前記第2のミラー面、前記第3のミラー面及び前記第4のミラー面において順次反射される、請求項1に記載の手術用立体顕微鏡。 - 前記第1のミラー面及び前記第4のミラー面は、互いに対して、60°〜120°の角度を有し、前記第2のミラー面及び前記第3のミラー面は、互いに対して、60°〜120°の角度を有する、請求項13に記載の手術用立体顕微鏡。
- 前記第1のミラー面及び前記第4のミラー面は、互いに対して、80°〜100°の角度を有し、前記第2のミラー面及び前記第3のミラー面は、互いに対して、80°〜100°の角度を有する、請求項14に記載の手術用立体顕微鏡。
- 前記第3のミラー面及び前記第4のミラー面は、互いに対して、実質的に60°の角度を有する、請求項14又は15に記載の手術用立体顕微鏡。
- 前記第2のミラー面と前記第3のミラー面との間の前記少なくとも一対の結像光路には、光学レンズが存在しない、請求項13に記載の手術用立体顕微鏡。
- 前記手術用立体顕微鏡は、前記第2のミラー面を前記第2の旋回軸を中心として選択的に旋回させる第2の駆動装置をさらに含む、請求項1又は6に記載の手術用立体顕微鏡。
- 前記手術用立体顕微鏡は、前記第1のミラー面を前記第1の旋回軸を中心として選択的に旋回させる第1の駆動装置をさらに含む、請求項18に記載の手術用立体顕微鏡。
- 前記制御装置は、前記第1及び第2の駆動装置のうちの少なくとも1つの駆動装置を制御する、請求項19に記載の手術用立体顕微鏡。
- 前記第1のミラー面は、前記物体平面と、前記少なくとも一対の結像光路に沿って配置された、前記結像系の第1の光学有効面との間に配置されている、請求項1又は6に記載の手術用立体顕微鏡。
- 前記結像系は、共通の光軸に沿って配置されかつ前記少なくとも一対の結像光路の前記2つの結像光路の両方によって横切られる複数のレンズを含む第1の部分システムを含む、請求項1又は6に記載の手術用立体顕微鏡。
- 前記第1及び第2のミラー面のうちの少なくとも1つのミラー面は、前記第1の部分システムの光学レンズ間に前記第1の部分システムの前記光軸に沿って配置されている、請求項22に記載の手術用立体顕微鏡。
- 前記第1の部分システムの少なくとも2つのレンズは、前記光軸に沿って互いに対して変位可能である、請求項22に記載の手術用立体顕微鏡。
- 前記結像系は、第2の部分システムを含み、前記第2の部分システムの光学素子は、前記少なくとも一対の結像光路のうちの1つの結像光路のみによってそれぞれ横切られる複数のレンズを含む、請求項22に記載の手術用立体顕微鏡。
- 前記第2の部分システムの少なくとも2つのレンズは、共通の結像光路に沿って互いに対して変位可能である、請求項25に記載の手術用立体顕微鏡。
- 前記手術用立体顕微鏡は、前記物体平面を照明するための照明光路を有する照明系をさらに含み、
前記第1及び第2のミラー面のうちの少なくとも1つのミラー面は、前記照明光路に沿って配置され、
前記照明光路は、少なくとも前記第1及び第2のミラー面のうちの少なくとも1つのミラー面によって偏向される、請求項1又は6に記載の手術用立体顕微鏡。 - 前記手術用立体顕微鏡は、前記物体平面を照明するための照明光路を有する照明系をさらに含み、
少なくとも1つの照明ミラーが、前記照明光路に沿って配置され、前記照明ミラーは、前記制御装置によって決定された変位に応じて旋回可能である、請求項1又は7に記載の手術用立体顕微鏡。 - 前記手術用立体顕微鏡は、前記結像系を支持しかつ前記結像系を並進変位させるための少なくとも1つの変位装置を含むスタンドをさらに含む、請求項1又は6に記載の手術用立体顕微鏡。
- 被観察物体を配置するための物体平面に配置される前記被観察物体を結像するための手術用立体顕微鏡であって、
前記手術用立体顕微鏡は、
少なくとも一対の主ビームが前記物体平面においてゼロ度とは異なる立体視角を対として有すると共に、前記物体平面の結像フィールドを結像するための少なくとも一対の結像光路を、形成する結像系と、
前記物体平面及び前記手術用立体顕微鏡に対して、前記結像系の前記結像フィールドを並進変位させるように適合された変位装置と、
前記物体平面における前記結像フィールドの所望の変位を決定しかつ前記変位装置をこれに応じて制御するように適合された制御装置とを含み、
前記変位装置は、前記少なくとも一対の結像光路を偏向させるために前記少なくとも一対の結像光路に沿って配置された第1のミラー面であって、前記制御装置によって決定された変位に応じて旋回可能な第1のミラー面を含む手術用立体顕微鏡。 - 前記結像系は、前記少なくとも一対の結像光路を偏向させるための第2のミラー面、第3のミラー面及び第4のミラー面を含み、
前記少なくとも一対の結像光路は、前記第1のミラー面、前記第2のミラー面、前記第3のミラー面及び前記第4のミラー面において順次反射される、請求項30に記載の手術用立体顕微鏡。 - 前記第1のミラー面及び前記第4のミラー面は、互いに対して、60°〜120°の角度を有し、前記第2のミラー面及び前記第3のミラー面は、互いに対して、90°の角度を有し、前記第3のミラー面及び前記第4のミラー面は、互いに対して、実質的に60°の角度を有する、請求項31に記載の手術用立体顕微鏡。
- 前記第1のミラー面及び前記第4のミラー面は、互いに対して、80°〜100°の角度を有する、請求項32に記載の手術用立体顕微鏡。
- 前記手術用立体顕微鏡は、前記物体平面を照明するための照明光路を有する照明系をさらに含み、
前記第1のミラー面は、前記照明光路に沿って配置され、
前記照明光路は、少なくとも前記第1のミラー面によって偏向される、請求項30に記載の手術用立体顕微鏡。 - 前記手術用立体顕微鏡は、前記物体平面を照明するための照明光路を有する照明系をさらに含み、
少なくとも1つの照明ミラーが、前記照明光路に沿って配置され、前記照明ミラーは、前記制御装置によって決定された変位に応じて旋回可能である、請求項30に記載の手術用立体顕微鏡。 - 前記手術用立体顕微鏡は、前記結像系によって生成される前記結像フィールドの像を回転させる補償装置をさらに含み、
前記制御装置は、前記第1のミラー面の旋回に応じて前記補償装置を制御し、
前記結像系は、画像データを生成するために前記少なくとも一対の結像光路内に配置された少なくとも1つのカメラを含み、
前記補償装置は、前記少なくとも1つのカメラに接続されており、前記少なくとも1つのカメラによって生成される画像データを電子画像処理を用いて回転させる、請求項30に記載の手術用立体顕微鏡。 - 前記結像系は、画像データを生成するために前記少なくとも一対の結像光路内に配置された少なくとも1つのカメラを含み、
前記制御装置は、前記少なくとも1つのカメラに接続されており、前記画像データにおけるマーカーの位置を検出しかつ前記マーカーの検出された位置に応じて、前記変位装置を制御するようにさらに適合されており、
前記制御装置は、前記画像データにおける前記マーカーの位置が実質的に一定となるように、前記変位装置を自動的に制御する、請求項30に記載の手術用立体顕微鏡。 - 前記第1のミラー面は、前記物体平面と、前記少なくとも一対の結像光路に沿って配置された、前記結像システムの第1の光学有効面との間に配置されている、請求項30に記載の手術用立体顕微鏡。
- 前記結像フィールドは、10mm〜100mmの直径を有する、請求項1、6及び30のいずれか1項に記載の手術用立体顕微鏡。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102006010767A DE102006010767B4 (de) | 2006-03-08 | 2006-03-08 | Mikroskopiesystem |
| DE102006010767.5 | 2006-03-08 | ||
| PCT/EP2007/002025 WO2007101695A1 (de) | 2006-03-08 | 2007-03-08 | Mikroskopiesystem mit einem schwenkbaren spiegelpaar zur kompensation eines objektversatzes |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009529145A JP2009529145A (ja) | 2009-08-13 |
| JP2009529145A5 JP2009529145A5 (ja) | 2011-03-31 |
| JP5327670B2 true JP5327670B2 (ja) | 2013-10-30 |
Family
ID=38007153
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008557670A Active JP5327670B2 (ja) | 2006-03-08 | 2007-03-08 | 手術用立体顕微鏡 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20090059363A1 (ja) |
| EP (1) | EP1991899B9 (ja) |
| JP (1) | JP5327670B2 (ja) |
| DE (1) | DE102006010767B4 (ja) |
| WO (1) | WO2007101695A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9628300B2 (en) | 2001-11-13 | 2017-04-18 | Wi-Fi One, Llc | Method and signal generating apparatus for generating modulation signals |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102006009452B4 (de) * | 2005-10-20 | 2010-07-01 | Carl Zeiss Surgical Gmbh | Stereomikroskop |
| JP5023934B2 (ja) * | 2007-09-28 | 2012-09-12 | 株式会社ニコン | 顕微鏡 |
| DE102009019575A1 (de) | 2009-04-28 | 2010-11-11 | Carl Zeiss Surgical Gmbh | Stereoskopisches optisches Beobachtungsgerät und stereoskopisches optisches Beobachtungssystem |
| DE102009021087B4 (de) | 2009-05-13 | 2015-03-05 | Carl Zeiss Meditec Ag | Stereo-Mikroskopiesystem und optischer Aufbau zur Verwendung in einem solchen Stereo-Mikroskopiesystem |
| DE102009046449B3 (de) * | 2009-11-06 | 2011-05-12 | Leica Instruments (Singapore) Pte. Ltd. | Stereomikroskop |
| JP2012042669A (ja) * | 2010-08-18 | 2012-03-01 | Sony Corp | 顕微鏡制御装置及び光学的歪み補正方法 |
| GB2497092A (en) * | 2011-11-29 | 2013-06-05 | John Sharpe Ward | Stereoscopic microscope with two separate adjustment means in the path of left and right sub-beams |
| DE102012006749B4 (de) | 2012-04-03 | 2020-06-18 | Carl Zeiss Meditec Ag | Stereomikroskop |
| GB201220422D0 (en) | 2012-11-13 | 2012-12-26 | Cairn Res Ltd | Optical imaging device |
| KR101371384B1 (ko) * | 2013-01-10 | 2014-03-07 | 경북대학교 산학협력단 | 트랙킹 시스템 및 이를 이용한 트랙킹 방법 |
| DE102014102425B4 (de) | 2014-02-25 | 2018-06-28 | Carl Zeiss Meditec Ag | Mikroskopsystem und Mikroskopieverfahren unter Verwendung digitaler Marker |
| DE102015216572A1 (de) | 2015-08-31 | 2016-05-12 | Carl Zeiss Meditec Ag | Vorrichtung zur Umlenkung eines optischen Strahlengangs sowie Medizinische Visualisierungseinrichtung mit einer solchen Vorrichtung |
| DE102016113978B4 (de) * | 2016-07-28 | 2021-09-02 | Lilas Gmbh | Vorrichtung zum Ablenken einer Laserstrahlung oder zum Ablenken von Licht |
| EP3285107B2 (en) | 2016-08-16 | 2024-02-28 | Leica Instruments (Singapore) Pte. Ltd. | Surgical microscope with gesture control and method for a gesture control of a surgical microscope |
| EP3531184B1 (en) * | 2018-02-23 | 2022-06-29 | Leica Instruments (Singapore) Pte. Ltd. | Surgical microscope with movable beam deflector, method for operating the same and retrofit-kit |
| TWI738407B (zh) * | 2019-11-07 | 2021-09-01 | 宏達國際電子股份有限公司 | 頭戴式顯示裝置 |
Family Cites Families (40)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4601550A (en) * | 1983-08-08 | 1986-07-22 | Tokyo Kogaku Kikai Kabushiki Kaisha | Stereo-microscope with a common objective lens system |
| DE3336519A1 (de) | 1983-10-07 | 1985-04-25 | Fa. Carl Zeiss, 7920 Heidenheim | Monipulator an operationsmikroskopen |
| DE3833876A1 (de) * | 1988-10-05 | 1990-04-12 | Zeiss Carl Fa | Zwei optisch-mechanisch gekoppelte operationsmikroskope mit koaxialer beleuchtung |
| US5253106A (en) * | 1992-03-20 | 1993-10-12 | Amarel Precision Instruments, Inc. | Oblique viewing system for microscopes |
| US5612816A (en) * | 1992-04-28 | 1997-03-18 | Carl-Zeiss-Stiftung | Endoscopic attachment for a stereoscopic viewing system |
| US5225923A (en) * | 1992-07-09 | 1993-07-06 | General Scanning, Inc. | Scanning microscope employing improved scanning mechanism |
| DE4336715C2 (de) * | 1992-10-27 | 1999-07-08 | Olympus Optical Co | Stereomikroskop |
| JP3454851B2 (ja) * | 1992-10-27 | 2003-10-06 | オリンパス光学工業株式会社 | 実体顕微鏡 |
| US5701196A (en) * | 1993-11-05 | 1997-12-23 | Olympus Optical Co., Ltd | Stereomicroscope |
| CH689903A5 (de) * | 1994-12-23 | 2000-01-14 | Zeiss Carl Fa | Zoom-System für mindestens zwei stereoskopische Beobachtungs- oder Dokumentationsstrahlengänge. |
| US5912763A (en) * | 1995-02-03 | 1999-06-15 | Leica Mikroskopie Systeme Ag | Stereomicroscope including a camera for receiving different images at different time intervals |
| JPH10260359A (ja) * | 1997-03-19 | 1998-09-29 | Olympus Optical Co Ltd | 像回転装置 |
| JP2001356272A (ja) * | 2000-06-12 | 2001-12-26 | Olympus Optical Co Ltd | 画像取得方法及び走査型光学顕微鏡 |
| US6433929B1 (en) * | 2000-06-12 | 2002-08-13 | Olympus Optical Co., Ltd. | Scanning optical microscope and method of acquiring image |
| US6628457B2 (en) * | 2000-07-11 | 2003-09-30 | Asahi Kogaku Kogyo Kabushiki Kaisha | Antivibration microscope |
| JP3857888B2 (ja) * | 2000-07-11 | 2006-12-13 | ペンタックス株式会社 | ビデオ式顕微鏡への防振機構の組込みの決定方法 |
| JP2004510198A (ja) * | 2000-09-26 | 2004-04-02 | カール−ツアイス−スチフツング | 像反転系、検眼鏡補助モジュール、手術用顕微鏡 |
| DE10140402B4 (de) * | 2000-09-26 | 2012-08-30 | Carl Zeiss Meditec Ag | Bildumkehrsystem, Ophthalmoskopie-Vorsatzmodul und Operationsmikroskop |
| ATE360227T1 (de) * | 2002-02-04 | 2007-05-15 | Zeiss Carl Surgical Gmbh | Stereo-untersuchungssysteme und stereo- bilderzeugungsvorrichtung sowie verfahren zum betrieb einer solchen |
| DE10221796A1 (de) * | 2002-05-15 | 2004-01-29 | Carl Zeiss | Operationsmikroskop und Bildaufnahmeeinrichtung für Operationsmikroskop |
| DE10330581B4 (de) * | 2002-08-23 | 2015-02-19 | Carl Zeiss Meditec Ag | Verstellvorrichtung |
| JP4197915B2 (ja) * | 2002-09-19 | 2008-12-17 | オリンパス株式会社 | 実体顕微鏡用撮影装置 |
| DE10255965A1 (de) * | 2002-11-29 | 2004-06-09 | Leica Microsystems (Schweiz) Ag | Stereomikroskop |
| DE10255967A1 (de) * | 2002-11-29 | 2004-06-09 | Leica Microsystems (Schweiz) Ag | Vorrichtung zur Ausspiegelung eines stereoskopischen Beobachtungsstrahlengangs |
| DE10255960A1 (de) * | 2002-11-29 | 2004-06-24 | Leica Microsystems (Schweiz) Ag | Stereomikroskop |
| DE10255964A1 (de) * | 2002-11-29 | 2004-07-01 | Siemens Ag | Photovoltaisches Bauelement und Herstellungsverfahren dazu |
| DE10255961B3 (de) * | 2002-11-29 | 2004-04-08 | Leica Microsystems (Schweiz) Ag | Stereomikroskop |
| US7159831B2 (en) * | 2003-02-21 | 2007-01-09 | Carl-Zeiss-Stiftung | Adjusting device |
| DE10312471B4 (de) * | 2003-03-20 | 2006-04-13 | Leica Microsystems (Schweiz) Ag | Mikroskop, insbesondere Stereomikroskop |
| DE10312681B4 (de) * | 2003-03-21 | 2005-09-15 | Carl Zeiss | Mikroskopiesystem |
| DE10332603B4 (de) * | 2003-07-17 | 2006-04-06 | Leica Microsystems (Schweiz) Ag | Stereomikroskop |
| DE10355527A1 (de) * | 2003-11-21 | 2005-06-09 | Carl Zeiss Jena Gmbh | Mikroskopkamera |
| JP5093979B2 (ja) * | 2003-12-10 | 2012-12-12 | カール ツァイス メディテック アーゲー | 観察装置用対物レンズ、顕微鏡ならびに対物レンズの調節方法 |
| DE602005007403D1 (de) * | 2004-03-25 | 2008-07-24 | Olympus Corp | Scannendes konfokales Mikroskop |
| JP2005301065A (ja) * | 2004-04-14 | 2005-10-27 | Olympus Corp | 観察装置 |
| JP4576876B2 (ja) * | 2004-05-10 | 2010-11-10 | 株式会社ニコン | 顕微鏡システム |
| JP4752208B2 (ja) * | 2004-07-23 | 2011-08-17 | 株式会社ニコン | 光学顕微鏡システムおよびこれを用いた試料動画像生成方法 |
| CN100585449C (zh) * | 2005-01-27 | 2010-01-27 | 伦斯勒理工学院 | 可适应性扫描光学显微镜 |
| DE102006012388A1 (de) * | 2005-10-20 | 2007-04-26 | Carl Zeiss Surgical Gmbh | Mikroskopiesystem |
| DE102006009452B4 (de) * | 2005-10-20 | 2010-07-01 | Carl Zeiss Surgical Gmbh | Stereomikroskop |
-
2006
- 2006-03-08 DE DE102006010767A patent/DE102006010767B4/de active Active
-
2007
- 2007-03-08 JP JP2008557670A patent/JP5327670B2/ja active Active
- 2007-03-08 EP EP07723118.1A patent/EP1991899B9/de active Active
- 2007-03-08 WO PCT/EP2007/002025 patent/WO2007101695A1/de active Application Filing
-
2008
- 2008-09-05 US US12/205,742 patent/US20090059363A1/en not_active Abandoned
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9628300B2 (en) | 2001-11-13 | 2017-04-18 | Wi-Fi One, Llc | Method and signal generating apparatus for generating modulation signals |
| US9647856B2 (en) | 2001-11-13 | 2017-05-09 | Wi-Fi One, Llc | Transmission apparatus and transmission method |
| US9735986B2 (en) | 2001-11-13 | 2017-08-15 | Panasonic Intellectual Property Corporation Of America | Transmission and reception apparatus and method |
| US10003443B2 (en) | 2001-11-13 | 2018-06-19 | Wi-Fi One, Llc | Methods and apparatus for transmitting modulation signals |
| US10033551B2 (en) | 2001-11-13 | 2018-07-24 | Panasonic Intellectual Property Corporation Of America | Transmission and reception signal processor and method |
| US10263749B2 (en) | 2001-11-13 | 2019-04-16 | Panasonic Intellectual Property Corporation Of America | Transmission and reception signal processor and method |
| US10341071B2 (en) | 2001-11-13 | 2019-07-02 | Wi-Fi One, Llc | Radio transmission apparatus and methods |
| US10355841B2 (en) | 2001-11-13 | 2019-07-16 | Wi-Fi One, Llc | Methods and apparatus for transmitting modulation signals |
| US10491351B2 (en) | 2001-11-13 | 2019-11-26 | Panasonic Intellectual Property Corporation Of America | Transmission and reception signal processor and method |
| US10630443B2 (en) | 2001-11-13 | 2020-04-21 | Wi-Fi One, Llc | Radio transmission apparatus and methods |
| US10651993B2 (en) | 2001-11-13 | 2020-05-12 | Wi-Fi One, Llc | Methods and apparatus for transmitting modulation signals |
| US10924241B2 (en) | 2001-11-13 | 2021-02-16 | Wi-Fi One, Llc | Methods and apparatus for transmitting modulation signals |
| US11115166B2 (en) | 2001-11-13 | 2021-09-07 | Wi-Fi One, Llc | Radio transmission apparatus and methods for transmitting a single or a plurality of modulation signals from one or more antenna |
| US11218266B2 (en) | 2001-11-13 | 2022-01-04 | Redwood Technologies, Llc | Methods and apparatus for transmitting modulation signals |
| US11223457B2 (en) | 2001-11-13 | 2022-01-11 | Panasonic Intellectual Property Corporation Of America | Transmission and reception signal processor and method |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1991899B1 (de) | 2016-05-11 |
| EP1991899A1 (de) | 2008-11-19 |
| WO2007101695A1 (de) | 2007-09-13 |
| EP1991899B9 (de) | 2016-10-05 |
| JP2009529145A (ja) | 2009-08-13 |
| DE102006010767A1 (de) | 2007-09-13 |
| DE102006010767B4 (de) | 2008-04-17 |
| US20090059363A1 (en) | 2009-03-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5327670B2 (ja) | 手術用立体顕微鏡 | |
| JP6521982B2 (ja) | 手術可視化システム及びディスプレイ | |
| JP5981924B2 (ja) | 縦揺れおよび横揺れ回転部を有する、外科用顕微鏡用の対物レンズアセンブリ | |
| US7633676B2 (en) | Stereomicroscope with coupling unit to swivel objective upon sensing movement of eyepiece | |
| JP6306580B2 (ja) | カメラ用の可変3次元アダプタ組立体 | |
| KR101056484B1 (ko) | 사각 광경로를 형성하는 광학 시스템 및 그 방법 | |
| JP5129647B2 (ja) | 振動補償機能を有する光学装置 | |
| JP2005121820A (ja) | 画像観察装置 | |
| JPH06222274A (ja) | 手術顕微鏡 | |
| US20070047070A1 (en) | Microscope | |
| US7593156B2 (en) | Microscope with micro-mirrors for optional deflection and/or beam splitting | |
| JPH05346543A (ja) | 双眼実体顕微鏡 | |
| JP4598449B2 (ja) | 顕微鏡 | |
| JP2004109488A (ja) | 実体顕微鏡 | |
| US20010055150A1 (en) | Video-type stereoscopic microscope | |
| CN110187485B (zh) | 具有可移动光束偏转器的手术显微镜、其操作方法和改造套件 | |
| JP2005087249A (ja) | 保持装置および観察装置 | |
| JP4615840B2 (ja) | 手術用観察装置 | |
| JP3661276B2 (ja) | 望遠機能付顕微鏡 | |
| JP6695463B2 (ja) | 可動のビームデフレクタを備えた医療用観察装置 | |
| JP2559741Y2 (ja) | 手術用顕微鏡 | |
| JP4499223B2 (ja) | 手術用顕微鏡 | |
| JP3806468B2 (ja) | 手術用顕微鏡装置 | |
| JP2004070239A (ja) | 実体顕微鏡 | |
| JP2005010206A (ja) | 手術用顕微鏡 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100129 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110209 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120105 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120323 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120330 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120703 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120925 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20121218 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20121226 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130123 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130130 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130225 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130304 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130313 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130620 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20130712 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130712 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5327670 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |