JP4372060B2 - 画像読取装置 - Google Patents
画像読取装置 Download PDFInfo
- Publication number
- JP4372060B2 JP4372060B2 JP2005189796A JP2005189796A JP4372060B2 JP 4372060 B2 JP4372060 B2 JP 4372060B2 JP 2005189796 A JP2005189796 A JP 2005189796A JP 2005189796 A JP2005189796 A JP 2005189796A JP 4372060 B2 JP4372060 B2 JP 4372060B2
- Authority
- JP
- Japan
- Prior art keywords
- document
- reading
- image
- unit
- dust
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/40—Picture signal circuits
- H04N1/409—Edge or detail enhancement; Noise or error suppression
- H04N1/4097—Removing errors due external factors, e.g. dust, scratches
Description
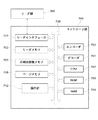
200 リーダ部
400 CPU
401 ROM
402 RAM
403 不揮発性メモリ
601 給紙ローラ
602 分離ローラ
603 分離ベルト
604 搬送ローラ
605 レジストローラ
608 原稿後端検知センサ
609 最終原稿検知センサ
610 原稿セット検知センサ
611 ストッパ
620 原稿トレイ
680 レジスタセンサ
681 給紙モータ
682 カウンタ
700 コントローラ部
Claims (2)
- 複数の原稿を1枚づつ順に搬送する原稿搬送手段と、
前記原稿上の画像を読み取り画像データを出力する読取手段と、
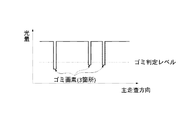
前記読取手段の読取位置に存在する異物を検知する異物検知手段と、
前記異物検知手段により検知された異物の前記画像データに対する影響を軽減する補正手段と、
前記異物検知手段により検知された異物の個数に関する情報に応じて、前記原稿搬送手段により第1の紙間距離で原稿を搬送しながら所定の読取位置で前記読取手段が当該原稿上の画像を読み取る第1の流し読みモードと、前記原稿搬送手段により前記第1の紙間距離よりも長い第2の紙間距離で原稿を搬送しながら所定の読取位置で前記読取手段が当該原稿上の画像を読み取る第2の流し読みモードと、を選択的に実行するために前記原稿搬送手段及び前記読取手段を制御する制御手段と、
を備え、
前記制御手段は、前記異物検知手段により検知された異物の個数が所定値を超えたと判定した場合、前記第2の流し読みモードを実行するように前記原稿搬送手段及び前記読取手段を制御することを特徴とする画像読取装置。 - 前記読取手段により原稿上の画像を高画質で読み取る高画質モードを設定する設定手段を備え、
前記設定手段により高画質モードが設定された場合に、前記制御手段は、前記第2の流し読みモードを実行するように前記原稿搬送手段及び前記読取手段を制御することを特徴とする請求項1記載の画像読取装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005189796A JP4372060B2 (ja) | 2005-06-29 | 2005-06-29 | 画像読取装置 |
| US11/476,985 US8488209B2 (en) | 2005-06-29 | 2006-06-28 | Image reader, and control method and control program for the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005189796A JP4372060B2 (ja) | 2005-06-29 | 2005-06-29 | 画像読取装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007013399A JP2007013399A (ja) | 2007-01-18 |
| JP2007013399A5 JP2007013399A5 (ja) | 2008-08-07 |
| JP4372060B2 true JP4372060B2 (ja) | 2009-11-25 |
Family
ID=37589132
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005189796A Expired - Fee Related JP4372060B2 (ja) | 2005-06-29 | 2005-06-29 | 画像読取装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8488209B2 (ja) |
| JP (1) | JP4372060B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9088680B2 (en) | 2010-05-12 | 2015-07-21 | Pfu Limited | Image reading device and image reading method |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004173165A (ja) * | 2002-11-22 | 2004-06-17 | Canon Inc | 画像読取装置 |
| JP4498149B2 (ja) * | 2005-01-17 | 2010-07-07 | キヤノン株式会社 | 画像読み取り装置 |
| US7558437B2 (en) * | 2005-03-15 | 2009-07-07 | Kabushiki Kaisha Toshiba | Method and apparatus for image processing |
| JP4966696B2 (ja) * | 2007-03-14 | 2012-07-04 | 株式会社Pfu | スキャナ装置 |
| JP2009200599A (ja) * | 2008-02-19 | 2009-09-03 | Ricoh Co Ltd | 画像処理装置及び画像形成装置 |
| US20110122462A1 (en) * | 2009-11-23 | 2011-05-26 | Kabushiki Kaisha Toshiba | Image reading apparatus, control method for the same, and image forming apparatus |
| JP2011151687A (ja) * | 2010-01-22 | 2011-08-04 | Canon Inc | 画像読取装置、画像読取装置の制御方法、及びプログラム |
| JP5607440B2 (ja) * | 2010-06-30 | 2014-10-15 | キヤノン株式会社 | 画像読取装置及びその制御方法 |
| JP5693084B2 (ja) * | 2010-08-17 | 2015-04-01 | キヤノン株式会社 | 画像読取装置、画像読取装置の制御方法、及びプログラム |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2899158B2 (ja) * | 1992-01-28 | 1999-06-02 | キヤノン株式会社 | インクジェット記録装置 |
| US7119926B2 (en) * | 2000-12-12 | 2006-10-10 | Canon Kabushiki Kaisha | Dust and dirt detection in image reading apparatus having original flow scanning function |
| JP4401597B2 (ja) * | 2001-05-25 | 2010-01-20 | キヤノン株式会社 | 画像読取装置 |
| JP2003333290A (ja) | 2002-05-14 | 2003-11-21 | Canon Inc | 画像読取装置、画像読取方法、プログラムおよび記憶媒体 |
| JP2003348336A (ja) | 2002-05-24 | 2003-12-05 | Canon Inc | 画像処理方法及び装置 |
| JP2004173165A (ja) * | 2002-11-22 | 2004-06-17 | Canon Inc | 画像読取装置 |
-
2005
- 2005-06-29 JP JP2005189796A patent/JP4372060B2/ja not_active Expired - Fee Related
-
2006
- 2006-06-28 US US11/476,985 patent/US8488209B2/en not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9088680B2 (en) | 2010-05-12 | 2015-07-21 | Pfu Limited | Image reading device and image reading method |
Also Published As
| Publication number | Publication date |
|---|---|
| US8488209B2 (en) | 2013-07-16 |
| US20070002393A1 (en) | 2007-01-04 |
| JP2007013399A (ja) | 2007-01-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4372060B2 (ja) | 画像読取装置 | |
| US7782505B2 (en) | Image reading apparatus and control method therefor | |
| US7880933B2 (en) | Image reading apparatus, image forming apparatus, control method, and program that accounts for time intervals from one document to another document | |
| JP2008227889A (ja) | 画像読取装置およびその制御方法 | |
| JP5024553B2 (ja) | 画像読取装置 | |
| JP5711480B2 (ja) | 画像読取装置、画像読取装置の制御方法、及びプログラム | |
| JP4926791B2 (ja) | 画像読取装置 | |
| JP2006262285A (ja) | 画像読取装置、及び画像読取方法 | |
| JP6390251B2 (ja) | 画像読取装置、画像形成装置、及びプログラム | |
| JP2006140902A (ja) | 画像読取装置 | |
| JP2009159016A (ja) | 画像読取装置 | |
| JP2005184101A (ja) | 画像読み取り装置 | |
| JP2008263355A (ja) | 画像読取装置 | |
| JP2007043469A (ja) | 画像読取装置 | |
| JP2008028782A (ja) | 原稿仕分装置及び原稿仕分方法 | |
| JP2007243441A (ja) | 画像読取装置、当該装置の制御方法及び制御プログラム | |
| JPH07273952A (ja) | 画像読み取り装置 | |
| JP5025332B2 (ja) | 画像読取装置 | |
| JP2005065128A (ja) | 画像読み取り装置 | |
| JP2009038638A (ja) | 画像読取装置 | |
| JP2018098527A (ja) | 原稿読取装置、原稿読取装置の制御方法、画像形成装置 | |
| JPH09130600A (ja) | 画像読み取り装置 | |
| JP2017103699A (ja) | 画像処理装置及び画像読取装置 | |
| JP2020156055A (ja) | 画像処理装置、白紙原稿判定方法 | |
| JP2007282065A (ja) | 画像読取装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20070626 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080623 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080623 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090608 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090616 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090716 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090825 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090901 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120911 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120911 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130911 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |