JP5607440B2 - 画像読取装置及びその制御方法 - Google Patents
画像読取装置及びその制御方法 Download PDFInfo
- Publication number
- JP5607440B2 JP5607440B2 JP2010150254A JP2010150254A JP5607440B2 JP 5607440 B2 JP5607440 B2 JP 5607440B2 JP 2010150254 A JP2010150254 A JP 2010150254A JP 2010150254 A JP2010150254 A JP 2010150254A JP 5607440 B2 JP5607440 B2 JP 5607440B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- motor
- reading
- speed
- original
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Landscapes
- Image Input (AREA)
- Facsimiles In General (AREA)
- Facsimile Scanning Arrangements (AREA)
- Exposure Or Original Feeding In Electrophotography (AREA)
Description
原稿を搬送して当該原稿の画像をセンサにより読み取り、前記原稿の画像に対応する画像データを生成する画像読取装置であって、
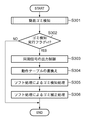
第1の搬送速度で搬送される原稿と原稿との間で、前記センサにより出力される一主走査分の画素データの内、前記画素データの反射光量が閾値よりも小さく当該閾値と前記反射光量との差分の累積値が所定値以上の場合に、前記センサの読み取り位置に異物が存在していると判定する判定手段と、
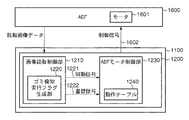
前記判定手段により前記異物が存在していると判定されると、読み取り対象の原稿を搬送するためのモータを駆動するための制御信号を変更して当該モータの回転速度を前記第1の搬送速度よりも遅い第2の搬送速度に対応する速度に変更して駆動するモータ制御手段と、
前記モータ制御手段により前記第2の搬送速度で搬送される原稿を前記センサにより読み取った画像データに、前記異物による影響を抑えるための画像補正を実行する画像補正手段と、を有することを特徴とする。
また、本発明は、以下の処理を実行することによっても実現される。即ち、上述した実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステム或いは装置に供給し、そのシステム或いは装置のコンピュータ(又はCPUやMPU等)がプログラムを読み出して実行する処理である。
1300 RAM
1400 ROM
Claims (3)
- 原稿を搬送して当該原稿の画像をセンサにより読み取り、前記原稿の画像に対応する画像データを生成する画像読取装置であって、
第1の搬送速度で搬送される原稿と原稿との間で、前記センサにより出力される一主走査分の画素データの内、前記画素データの反射光量が閾値よりも小さく当該閾値と前記反射光量との差分の累積値が所定値以上の場合に、前記センサの読み取り位置に異物が存在していると判定する判定手段と、
前記判定手段により前記異物が存在していると判定されると、読み取り対象の原稿を搬送するためのモータを駆動するための制御信号を変更して当該モータの回転速度を前記第1の搬送速度よりも遅い第2の搬送速度に対応する速度に変更して駆動するモータ制御手段と、
前記モータ制御手段により前記第2の搬送速度で搬送される原稿を前記センサにより読み取った画像データに、前記異物による影響を抑えるための画像補正を実行する画像補正手段と、
を有することを特徴とする画像読取装置。 - 前記モータ制御手段は、
前記モータの制御信号を記憶する動作テーブルと、
前記動作テーブルの読出しタイミング及び書替えを制御する読取制御手段とを有し、
前記読取制御手段は、前記第2の搬送速度に変更する際、当該第2の搬送速度に対応する制御信号で前記動作テーブルを書換えて、前記第2の搬送速度に対応する読出しタイミングで前記動作テーブルを読み出して前記モータを駆動することを特徴とする請求項1に記載の画像読取装置。 - 原稿を搬送して当該原稿の画像をセンサにより読み取り、前記原稿の画像に対応する画像データを生成する画像読取装置を制御する制御方法であって、
第1の搬送速度で搬送される原稿と原稿との間で、前記センサにより出力される一主走査分の画素データの内、前記画素データの反射光量が閾値よりも小さく当該閾値と前記反射光量との差分の累積値が所定値以上の場合に、前記センサの読み取り位置に異物が存在していると判定する判定工程と、
前記判定工程で前記異物が存在していると判定されると、読み取り対象の原稿を搬送するためのモータを駆動するための制御信号を変更して当該モータの回転速度を前記第1の搬送速度よりも遅い第2の搬送速度に対応する速度に変更して駆動するモータ制御工程と、
前記モータ制御工程で前記第2の搬送速度で搬送される原稿を前記センサにより読み取った画像データに、前記異物による影響を抑えるための画像補正を実行する画像補正工程と、
を有することを特徴とする画像読取装置の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010150254A JP5607440B2 (ja) | 2010-06-30 | 2010-06-30 | 画像読取装置及びその制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010150254A JP5607440B2 (ja) | 2010-06-30 | 2010-06-30 | 画像読取装置及びその制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012015787A JP2012015787A (ja) | 2012-01-19 |
| JP5607440B2 true JP5607440B2 (ja) | 2014-10-15 |
Family
ID=45601696
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010150254A Expired - Fee Related JP5607440B2 (ja) | 2010-06-30 | 2010-06-30 | 画像読取装置及びその制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5607440B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6115103B2 (ja) * | 2012-12-04 | 2017-04-19 | 株式会社リコー | 情報処理装置及び応答方法 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4372060B2 (ja) * | 2005-06-29 | 2009-11-25 | キヤノン株式会社 | 画像読取装置 |
-
2010
- 2010-06-30 JP JP2010150254A patent/JP5607440B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012015787A (ja) | 2012-01-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9369599B2 (en) | Image reading device, image forming apparatus, and method for controlling image reading device to remove blank sheet image data | |
| JP5711480B2 (ja) | 画像読取装置、画像読取装置の制御方法、及びプログラム | |
| JP5607440B2 (ja) | 画像読取装置及びその制御方法 | |
| JP4533965B2 (ja) | 画像読取装置、画像読取方法、及び記憶媒体 | |
| JP4372060B2 (ja) | 画像読取装置 | |
| JP5772319B2 (ja) | 画像処理装置、画像読取装置、画像形成装置およびプログラム | |
| JP6390251B2 (ja) | 画像読取装置、画像形成装置、及びプログラム | |
| JP6759080B2 (ja) | 画像処理装置、画像形成装置、画像処理方法、およびプログラム | |
| JP4259928B2 (ja) | 移送物体検出装置,原稿読取装置および画像形成装置 | |
| JP2021005006A (ja) | 画像形成装置およびプログラム | |
| JP4840734B2 (ja) | 画像読取装置、画像形成装置およびプログラム | |
| JP2000177188A (ja) | 複写装置および記憶媒体 | |
| JP2008234543A (ja) | 画像記録装置 | |
| JP2007013585A (ja) | 画像読取装置、および画像読取装置の制御方法 | |
| JPH11109794A (ja) | 画像形成装置 | |
| JP5176802B2 (ja) | 画像処理装置、画像処理方法及び画像形成装置 | |
| JP2002232656A (ja) | 原稿処理装置 | |
| JP2012142722A (ja) | 読取装置、制御方法、及びプログラム | |
| JPH09238251A (ja) | 画像処理装置及びその方法 | |
| JP2002321405A (ja) | 画像形成装置 | |
| JP6221604B2 (ja) | 画像処理装置、画像形成装置、及び画像処理プログラム | |
| US8040549B2 (en) | Image processing apparatus | |
| JP2005205751A (ja) | 画像形成装置 | |
| JP2011199397A (ja) | 原稿読取装置及び原稿読取プログラム | |
| JP2008022434A (ja) | 画像読取装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130626 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140418 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140516 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140714 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140801 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140828 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5607440 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |