JP4098366B2 - エレベータ群の制御 - Google Patents
エレベータ群の制御 Download PDFInfo
- Publication number
- JP4098366B2 JP4098366B2 JP53164698A JP53164698A JP4098366B2 JP 4098366 B2 JP4098366 B2 JP 4098366B2 JP 53164698 A JP53164698 A JP 53164698A JP 53164698 A JP53164698 A JP 53164698A JP 4098366 B2 JP4098366 B2 JP 4098366B2
- Authority
- JP
- Japan
- Prior art keywords
- floor
- call
- time
- elevator
- deck
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/24—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration
- B66B1/2408—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration where the allocation of a call to an elevator car is of importance, i.e. by means of a supervisory or group controller
- B66B1/2458—For elevator systems with multiple shafts and a single car per shaft
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/02—Control systems without regulation, i.e. without retroactive action
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B2201/00—Aspects of control systems of elevators
- B66B2201/10—Details with respect to the type of call input
- B66B2201/102—Up or down call input
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B2201/00—Aspects of control systems of elevators
- B66B2201/10—Details with respect to the type of call input
- B66B2201/103—Destination call input before entering the elevator car
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B2201/00—Aspects of control systems of elevators
- B66B2201/20—Details of the evaluation method for the allocation of a call to an elevator car
- B66B2201/211—Waiting time, i.e. response time
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B2201/00—Aspects of control systems of elevators
- B66B2201/20—Details of the evaluation method for the allocation of a call to an elevator car
- B66B2201/212—Travel time
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B2201/00—Aspects of control systems of elevators
- B66B2201/20—Details of the evaluation method for the allocation of a call to an elevator car
- B66B2201/212—Travel time
- B66B2201/213—Travel time where the number of stops is limited
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B2201/00—Aspects of control systems of elevators
- B66B2201/20—Details of the evaluation method for the allocation of a call to an elevator car
- B66B2201/214—Total time, i.e. arrival time
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B2201/00—Aspects of control systems of elevators
- B66B2201/20—Details of the evaluation method for the allocation of a call to an elevator car
- B66B2201/215—Transportation capacity
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B2201/00—Aspects of control systems of elevators
- B66B2201/20—Details of the evaluation method for the allocation of a call to an elevator car
- B66B2201/222—Taking into account the number of passengers present in the elevator car to be allocated
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B2201/00—Aspects of control systems of elevators
- B66B2201/30—Details of the elevator system configuration
- B66B2201/306—Multi-deck elevator cars
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B2201/00—Aspects of control systems of elevators
- B66B2201/40—Details of the change of control mode
- B66B2201/402—Details of the change of control mode by historical, statistical or predicted traffic data, e.g. by learning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B2201/00—Aspects of control systems of elevators
- B66B2201/40—Details of the change of control mode
- B66B2201/403—Details of the change of control mode by real-time traffic data
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S187/00—Elevator, industrial lift truck, or stationary lift for vehicle
- Y10S187/902—Control for double-decker car
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Elevator Control (AREA)
Description
多数のエレベータが、同じロビーに到来する乗客たちをさばくエレベータ群を形成する場合、各エレベータを共通の群制御装置によって制御する。群制御システムは、いずれのエレベータを、与えられた処理待ちの階コールを処理するかを決定する。群制御の実現形態は、1群に含まれるエレベータの数や、さまざまな要因の影響にどのように重み付けするかに依存する。群制御はコスト関数を最適化するように設計することができ、コスト関数は、たとえば、乗客待ち時間、エレベータ群の発車回数、乗客乗車時間、乗客行程時間、またはこれらの組み合わせにさまざまな要因による種々の重みを加えたものを考慮に入れる。群制御はまた、エレベータ群が従うべき制御方針の種類を定める。
エレベータが2階式であり、2つのデッキがフレーム内で上下に接続されており、エレベータが停止すると建物の2つの階に同時に到着する場合、別の要件が群制御に付加される。
従来の制御方式は集団制御に基づいており、それによればエレベータは、常に運転方向における最も近い階コールを処理するため停止する。もし、コールを後続のカーに割り当てるなら、その次の階から発生し得る階コールとの同時発生は最大となる。通常のカーによるエレベータ群における集団制御は、退出および混成トラヒックに対しては効果がない。その結果は、最下階での停滞と不良な割当である。これは同様に、2階式エレベータの集団制御にもあてはまる。たとえば、米国特許第4,632,224号明細書には、2階式エレベータの集団制御システムが提示されており、階コールを、エレベータの走行方向について、後続のカーに割り当てている。言い換えれば、エレベータが下降しているときは、階コールを上方のデッキに割り当て、エレベータが上昇しているときは、階コールを下方のデッキに割り当てる。その他、米国特許第4,582,173号明細書には、2階式エレベータの群制御が開示されており、停止中のカー内での待ち時間に対応する内部コストと、階コールを発した階での待ち時間に対応する外部コストとを計算している。この制御では、これら乗客の時間損失からなる操作コストのみを最小化する。
本発明の目的は、エレベータ群の新しい制御方法を完成することにより、乗客行程時間、すなわちエレベータシステムにおいて費やされる総時間を改善し、エレベータ群の能力を、より良好に利用させることである。これを実行するために、本発明は、請求の範囲第1項の特徴段の記載事項を特徴とする。
本発明の、いくつかの他の実施例は、請求の範囲の従属項の特徴段の記載事項を特徴とする。仮に本発明のある特徴によれば、階コールがなされた階での待ち時間と、目的階までのカー内での乗車時間とで構成される行程時間を、乗客待ち時間および乗車時間を最小化することにより、最適化する。とくに行程時間の最適化は、2つのデッキを含むエレベータへの階コールを乗客待ち時間を最小化することにより選択し、階コールを処理する最良のデッキを乗客行程時間を最小化することにより選択して、行われる。
本発明の好ましい応用例では、乗客待ち時間を、予測待ち時間WTFeleを最小化することにより最適化する。予測待ち時間は、コールの背後で待っている人の数により重み付けされた現在の階コール時間と、階コールにカーが到着するまでの予測時間とを含む。到来するカーを待っているすべての乗客が、この変形例では考慮される。
本発明の他の変形例では、エレベータへの最少の追加停止と最小の追加遅延とを、乗客の目的階へ行く途中で生じるデッキに階コールを割り当てることにより、乗客行程時間を最小化する。停止回数が減れば、乗客の乗車の快適さも増す。
本発明のさらなる実施例では、すでにエレベータにとって現存する停止と、選択した階コールによって生ずる追加停止とを考慮して、エレベータの目的階への予測到着時間ETAを、各デッキごとに別個に計算し、目的階への予測到着時間が最小となるデッキに、階コールを割り当てる。
本発明の好ましい変形例では、コスト関数を最小化することにより、各階コールにとって最適なデッキを選択する。コスト関数は目的階への予測到着時間ETAdを含んでよい。または、コスト関数は、さらに、最も遠方のコール階への予測到着時間ETAfを含んでよい。
有利なことに、ETAを計算する場合、将来の停止および停止時間は、現存のカーコールおよび階コール停止と、選択されたコールにより生じる追加の停止および遅延とを基礎とする。選択された階コールによって生じる追加の遅延は、乗客のトラヒックの統計的予測から得られ、トラヒックは、1日の各時間帯における各階の乗客の到着および退出頻度を含む。
本発明の方式は、集団制御に基づく方式に比較して、2階式エレベータからなるエレベータ群の能力の実質的な増加を許容する。本発明の方式では、乗客への割当を考慮する。より短い行程およびエレベータの往復時間を達成し、運用能力を高める。乗客への割当のレベルをも実質的に改善する。
本発明による乗客待ち時間の最適化を、コール時間のみを最適化する従来技術の方法と比較した。乗客待ち時間は、ある乗客がロビーに到着すると開始し、その乗客がカーに入ると終了する。コール時間は、乗客がコールボタンを押すと開始し、その階コールが解消されると終了する。これらの時間はとくに、激しいトラヒック量のある期間では、異なる。乗客の人数は統計的予測から得られる。出発トラヒックのための平均待ち時間は、とくに激しいトラヒック状況においては、明らかに短くなる。各階の待ち時間については、平均待ち時間は、異なる階間では、より短く、良好なバランスがとれており、とくに最も交通量の激しい階でそうなっている。本制御方法は各エレベータを互いに離れさせ、均等に間隔をあけて建物の異なる部分に配置する。ある階コールを処理する最適なカーを、同時発生するコール、すなわちカーコールおよび割り当てられた階コールを考慮して、選択する。
平均および最大のコール時間をも削減される。本発明は、とくにランチタイムトラヒックの最中や、従来の制御方法では目標達成できなかった、複数の入口階を有する建物に、効果的な割当および短い待ち時間を生成する。
以下本発明を、いくつかの実施例について、図面を参照しながら説明する。
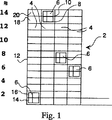
−第1図は2階式エレベータ群の概略図を示し、
−第2図はエレベータ群の制御を表す図を示し、
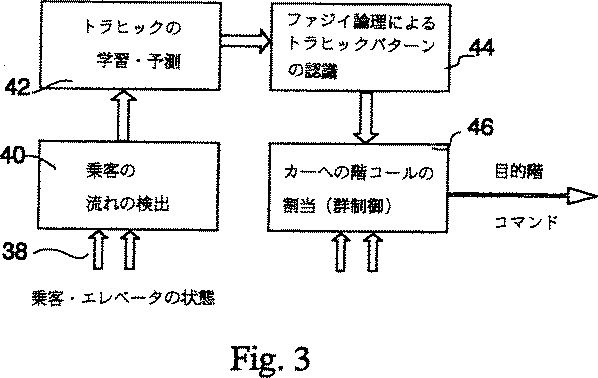
−第3図は2階式エレベータ群の制御を示す。
第1図は、4基の2階式エレベータ4を含むエレベータ群2を示す。各エレベータはエレベータカー6を含み、それは下方デッキ8と、その上の上方デッキ10とを有する。エレベータカーはエレベータシャフト12内で、たとえばトラクションシーブ機械を使用して動かし、カーはロープ(図示しない)で懸架する。図中の例では、建物は14階建てであり、下方デッキ8は第1階14と第13階18との間を走行するために使用でき、同様に、上方デッキ10は第2階16と第14階20との間を走行するために使用できる。乗客を第2階へ行かせるため、少なくとも第1階と第2階との間にはエスカレータを備える。この場合では、第1階と第2階とが入口階、すなわち人々が建物に入り、上の階へ行くためにエレベータを利用する階である。
両方のエレベータデッキには、目的階へのカーコールを入力するためのコールボタンが備えられ、各階には階コールボタンが備えられ、それにより乗客は問題の階へエレベータを注文できる。好ましい実施例においては、第1階における下方デッキでは、1つおきの階、たとえば奇数階へのカーコールを与えることができるのみであり、同様に、第2階における上方デッキでは、1つおきの階、たとえば偶数階へのカーコールを与えることができるのみである。それらより高い階からは、すべての階へのカーコールが許容される。各入口階には乗客を正しい入口階に案内するための標識を備える。さらに、エレベータが最下停止階にいるときは許容されていない階へのコールボタンを視野から隠蔽するか、またはコールボタンの周囲の蛍光サークルを異なる色にする。各カーおよび各階には、乗客に、目的階についての情報を与えるために十分なディスプレイを用意する。
第2図は、乗客により与えられたコールを処理するためにエレベータ群を制御する、エレベータ群の制御システムの概略図である。各エレベータはそれ自身のエレベータコントローラ22を有し、乗客がカーコールボタン26を使用して入力したカーコールを、シリアル通信リンク24を介して伝える。下方および上方デッキの両方からカーコールを、同一のエレベータコントローラ22に転送する。エレベータコントローラはエレベータの荷重付加装置28からの荷重データをも受信し、エレベータ機械の運転制御装置30もまた、エレベータコントローラの下で機能する。エレベータコントローラ22は群コントローラ32に接続され、群コントローラは階コールをそれぞれのエレベータに割り当てるなど、エレベータ群全体の機能を制御する。エレベータコントローラは、コール割当中、コスト関数の計算を行うため、マイクロコンピュータおよびメモリを備える。この関数の不可欠な部分は、階コール34であり、群コントローラへのシリアルリンクを介して伝達される。全トラヒックの流れおよびその建物内での分布は、エレベータ監視・コマンドシステム36により監視する。
各階から与えられる上方向および下方向への輸送のための階コールは、乗客待ち時間および、乗車時間すなわち目的階に到着するまでにカー内で費やされる時間を最小化するように処理を受ける。このように、行程時間、すなわち乗客がエレベータシステムにおいて費やす総時間を最小化し、エレベータの停止回数を減らし、エレベータ群の能力を最大化する。乗客およびエレベータに関連しており、統計および履歴データを利用した、状態データに基づいて、それぞれのエレベータに対する階コールの割当についての決定を行う。トラヒック予測装置は建物内の乗客のトラヒックの流れの予測値を生成する。優勢なトラヒックのパターンをファジイ論理の規則を使用して認定する。将来のトラヒックパターンおよび乗客トラヒックの流れの予測は、それぞれのコールに対してカーを選定するときに使用する。
第3図は、データの獲得および処理のさまざまな段階を示す。乗客およびエレベータの状態データ38から、乗客の流れを検出する(ブロック40)。トラヒックの流れはさまざまな方法で検出できる。乗客のトラヒック情報は、たとえば、ロビーに配置され、画像処理機能を有する検出器およびカメラから得られる。これらの方法は一般には入口階および一定の特殊階においてのみ使用し、建物内の全トラヒックの流れは測定できない。荷重情報における段階的な変化が測定でき、それを乗降する乗客数を計算するために使用する。光検出器信号を計算結果の検証に利用する。乗客の目的階を、現存する、および与えられるカーコールから推定する。
トラヒック統計およびトラヒック事象を、トラヒックを学習し、予測するために、ブロック42で使用する。長期統計は、各階における一日の、エレベータに乗降する乗客数を含む。短期統計は、カー動作の状態、方向および位置などのトラヒック事象と、階コールと、カーコールと、乗客に関連した過去5分間のトラヒック事象とを含む。トラヒックの構成要素を表すデータおよび必要なトラヒック能力をも、メモリに保存する。ブロック44では、トラヒックパターンをファジイ論理を利用して認識する。この実現方法については、それが詳細に述べられている米国特許第5,229,559号明細書を参照されたい。
2階式エレベータからなる群における階コールの割当(ブロック46)は、群制御システムにより実行し、上述の予測と、乗客およびエレベータの状態データとを利用する。トラヒック予測を、トラヒックパターンの認識、乗客待ち時間の最適化、および1より多い数の入口を有する建物における処理のバランス維持のために使用する。トラヒック予測はまた、駐車方針およびドアスピード制御にも影響する。
階コールのなされた階での乗客待ち時間と、カー内での乗車時間とを最適化することにより、最適な2階式エレベータを選定する。待ち時間を最適化するために、階コール時間をコールの背後で待っている乗客数により重み付けする。重み係数は各階で待っている乗客の予測数に依存する。各階の階コール時間およびトラヒックの流れが分かれば、コール時間をその階における乗客の到着頻度に乗じることにより、コール背後の乗客数の予測が得られる。各乗客の予測目的階は、各階に存在する乗客数の統計的予測により得られる。階コールのなされた階から与えられるカーコールは、そのようにして予測できる。乗客の到着した階から目的階までの時間を最小化することにより、乗客乗車時間を最適化する。最も長いカーコール時間、または最も遠方へのカーコール時間を最小化することにより、最大の乗車時間を最小化する。
ある階コールを処理する、より良好なデッキを、行程時間を比較することにより、エレベータ内部において、選択する。新しい階コールおよび新しいカーコールの影響を、各デッキごとに別個に予測する。乗客待ち時間および乗車時間を予測し、階コールを最短行程時間となるデッキに割り当てる。1つの変形例によれば、乗客待ち時間および最も遠方への乗車時間を予測し、最小コストとなるデッキに、階コールを選択する。
建物が1より多い数の入口階を有する場合、上方向への最繁トラヒック、および2方向トラヒックにおいて、これらの階における優勢なトラヒックの流れの予測に鑑みて、自由なエレベータを入口階へ帰還させる。上方向への最繁時間中、上方向へ行くカーは、もし他のカーが入口階で積載を行っているならば、上方向へのコールがオンされていない入口階に停止できる。
次に、本発明の場合における乗客行程時間、待ち時間および乗車時間の最小化について考察する。階コール割当中、現存の階コールをその経時に応じて降順に配列する。各階コールおよび各エレベータについて、予測待ち時間WTFを計算し、最短の予測待ち時間となるエレベータへコールを選択する。WTFeleを下式により定める。
WTFele=σ*(CT+ETAele)ここで
CT=現在の階コール時間、すなわち階コールが有効となってからの時間
σ=コールの背後の予測乗客数に関連する重み要素
ETAele=Σ(td)+Σ(ts)+tr+ta
td=1階分の走行時間
ts=階での予測停止時間
tr=カーが階に停留する予測時間
ta=たとえばある状況において、エレベータが駐車を命じられた場合の、追加遅延時間
ETAeleの式において、総和項Σ(td)はカーが階コールのなされた階へ到着する経路において必要とする時間を意味し、総和項Σ(ts)は階コールのなされた階へ到着する前の停止に必要とする時間を意味する。項trおよびtaは精度の低い近似においては省略することができる。
各階の走行時間を、群内の各エレベータについて、群制御プログラムの起動時に、階の高さと公称のエレベータ速度とを利用して計算する。エレベータの予測停止時間を、ドア時間と予測される乗客移動の数とを考慮して計算する。現在の階コール時間を、コールの背後の人数に比例する要素σにより重み付けする。この点については、米国特許第5,616,896号を参照されたい。各走行方向についての各階の人数は統計的予測から得られる。ETA時間を計算するときは、コールを処理できるエレベータのみを考慮に入れる。群制御下で操作されていない、または満載されているエレベータは、計算に含めない。
乗客行程時間を最適化するために、2階式エレベータへの階コールを、乗客待ち時間を最小化することにより選択し、階コールを処理する最適なデッキを、乗客がエレベータシステムにおいて費やす総時間、すなわち行程時間を最小化することにより選択する。
乗客待ち時間を各エレベータについての予測待ち時間WTFeleを最小化することにより最適化する。各エレベータでは現在の階コール時間CTはコールの背後で待っている人数σにより重み付けされている。コスト関数は下の式となる。
目的階への途上で、最も少ない追加停止と、最も少ない追加遅延とを階コールが生ずることとなるデッキに、階コールを割り当てることにより、乗客行程時間を最小化する。
現存のエレベータの停止と、選択された階コールにより生ずる追加停止とを考慮することにより、目的階への予測到着時間を各デッキについて別個に計算する。予測待ち時間と、目的階への予測到着時間との和が最小となるデッキに階コールを割り当てる。
各階コールについて、コスト関数を最小化することにより、最適なデッキを選択する。コスト関数Jにおいては、予測待ち時間と、目的階への予測到着時間との和を最小化し、関数は下の式となる。
実際の適用例では、目的階への予測到着時間を、最も遠方へのカーコールについて最適化する。したがって、最も遠方のコール階への予測到着時間ETAfを最小化し、コスト関数Jfは次の式となる。
ETAf=デッキ位置の階から開始した、最も遠方のコール階へのカーの予測到着時間
td=1階分の走行時間
ts=コール階での予測停止時間
ETAの計算においては、将来の停止および停止時間は、現存するカーコールおよび階コールの停止と、選択されたコールにより生ずる追加停止および追加遅延とに基づく。選択された階コールにより生ずる追加遅延は、乗客のトラヒックの統計的予測から得られ、それは、一日のうちその時間の乗客の到着および出発階に基づく。カーの荷重を監視し、もし荷重が最大積載制限を越えれば、そのデッキにはそれ以上の階コールを割り当てることはない。入口ロビーにおいて、上方デッキは偶数階へのカーコールのみを受け付けることができ、下方デッキは奇数階へのカーコールのみを受け付けることができる。入口階を発った後は、どちらのデッキも、すべての階へ到来できる。
これらのコスト関数により、いずれのデッキについても、乗客の総行程時間を最適化する。ここでも、必要とされるなら、追加遅延trおよびtaを加味することができる。
以上、いくつかの実施例により、本発明を説明した。しかし、この説明は制限を規定するものではなく、本発明の実施例は、以下の請求の範囲により規定される範囲内でさまざまに変形してよい。
Claims (14)
- カーを含み、該カーは上方デッキと下方デッキとを含み、該各デッキは、エレベータが停止するときに、建物の連続する階に到着する、少なくとも2基の2階式エレベータを含むエレベータ群の制御方法において、乗客行程時間を最適化するため、トラヒック予測をカー選択の基礎として用い、階コールを処理する最適なエレベータを、該トラヒック予測に基づく乗客待ち時間を最小化することによって選び、該最適なエレベータから階コールを処理する最適なデッキを、該トラヒック予測に基づく前記乗客行程時間を最小化することにより選択することを特徴とするエレベータ群の制御方法。
- 請求の範囲第1項記載の方法において、前記行程時間は階コール階での待ち時間と、目的階へのカー内での乗車時間とを含み、該行程時間を、前記乗客待ち時間と乗車時間とを最小化することにより、最適化することを特徴とするエレベータ群の制御方法。
- 請求の範囲第1項または第2項に記載の方法において、前記乗客待ち時間を、予測待ち時間WTFeleを最小化することにより最適化し、ここで現在の階コール時間CTを、コールの背後で待っている人の数σにより重み付けし、コスト関数を式
とし、ここでETAeleはカーの前記階コールへの予測到着時間であることを特徴とするエレベータ群の制御方法。 - 請求の範囲第1項ないし第3項のいずれかに記載の方法において、乗客の目的階へ行く途中で生じる追加停止により起こる追加遅延が最小であるデッキに、階コールを割り当てることにより、前記乗客行程時間を最小化することを特徴とするエレベータ群の制御方法。
- 請求の範囲第1項ないし第4項のいずれかに記載の方法において、すでにエレベータにとって現存する停止と、選択した階コールによって生ずる追加停止とを考慮して、エレベータの目的階への予測到着時間ETAを、各デッキごとに別個に計算し、該目的階への予測到着時間が最小となるデッキに、階コールを割り当てることを特徴とするエレベータ群の制御方法。
- 請求の範囲第1項ないし第5項のいずれかに記載の方法において、コスト関数を最小化することにより、各階コールにとって最適なデッキを選択することを特徴とするエレベータ群の制御方法。
- 請求の範囲第6項に記載の方法において、コスト関数Jにおいて、予測待ち時間と、目的階への予測到着時間との和を最小化し、該関数は式
であり、ここで
σ=コールの背後で待っている人数
CT=現在の階コール時間
ETAele=カーの階コールへの予測到着時間
ETAd=階コール階から出発した場合のカーの目的コール階への予測到着時間
td=1階分の走行時間
ts=コール階での予測停止時間
であることを特徴とするエレベータ群の制御方法。 - 請求の範囲第6項に記載の方法においてコスト関数Jにおいて、最も遠方のコール階への予測到着時間ETAfを最小化し、該関数は式
であり、ここで、
ETAf=デッキ位置の階から出発した場合の、最も遠方のコール階へのカーの予測到着時間
td=1階分の走行時間
ts=コール階での予測停止時間
であることを特徴とするエレベータ群の制御方法。 - 請求の範囲第7項または第8項記載の方法において、前記ETAの計算において、将来の停止および停止時間は、現存のカーコールおよび階コール停止と、選択されたコールにより生じる追加の停止および遅延とを基礎とすることを特徴とするエレベータ群の制御方法。
- 請求の範囲第9項記載の方法において、選択された階コールによって生じる追加遅延は、乗客のトラヒックの統計的予測から得られ、該トラヒックは、1日の各時間帯における各階の乗客の到着および退出頻度を含むことを特徴とするエレベータ群の制御方法。
- 請求の範囲第1項ないし第10項のいずれかに記載の方法において、カーの荷重を監視し、もし該荷重が最大積載制限を越えれば、そのデッキにはそれ以上の階コールを割り当てないことを特徴とするエレベータ群の制御方法。
- 請求の範囲第1項ないし第11項のいずれかに記載の方法において、メインロビーにでは、上方デッキおよび下方デッキは、1つおきの階のみへのカーコールを受け付けることを特徴とするエレベータ群の制御方法。
- 請求の範囲第12項記載の方法において、最下階を番号1で表せば、入口階を出発すると、前記下方デッキは奇数階へ到着し、前記上方デッキは偶数階へ到着することを特徴とするエレベータ群の制御方法。
- 請求の範囲第1項ないし第13項のいずれかに記載の方法において、上方の階では、コールを処理するとき、各デッキともすべての階に停止することができることを特徴とするエレベータ群の制御方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FI970282A FI111929B (fi) | 1997-01-23 | 1997-01-23 | Hissiryhmän ohjaus |
| FI970282 | 1997-01-23 | ||
| PCT/FI1998/000065 WO1998032683A1 (en) | 1997-01-23 | 1998-01-23 | Procedure for control of an elevator group consisting of double-deck elevators, which optimises passenger journey time |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2000507196A JP2000507196A (ja) | 2000-06-13 |
| JP4098366B2 true JP4098366B2 (ja) | 2008-06-11 |
Family
ID=8547775
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP53164698A Expired - Lifetime JP4098366B2 (ja) | 1997-01-23 | 1998-01-23 | エレベータ群の制御 |
Country Status (12)
| Country | Link |
|---|---|
| US (2) | US6237721B1 (ja) |
| EP (1) | EP0895506B1 (ja) |
| JP (1) | JP4098366B2 (ja) |
| KR (1) | KR100311931B1 (ja) |
| CN (1) | CN1087708C (ja) |
| AU (1) | AU728556B2 (ja) |
| BR (1) | BR9804765B1 (ja) |
| CA (1) | CA2249304C (ja) |
| DE (1) | DE69802876T2 (ja) |
| ES (1) | ES2166139T3 (ja) |
| FI (1) | FI111929B (ja) |
| WO (1) | WO1998032683A1 (ja) |
Families Citing this family (67)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001048431A (ja) * | 1999-08-06 | 2001-02-20 | Mitsubishi Electric Corp | エレベータ装置およびかご割当て制御方法 |
| ES2248295T3 (es) * | 2000-03-29 | 2006-03-16 | Inventio Ag | Control de llamada de destino para ascensores. |
| JP2001310876A (ja) * | 2000-04-19 | 2001-11-06 | Otis Elevator Co | ダブルデッキエレベータシステムの制御装置および制御方法 |
| JP4803865B2 (ja) * | 2000-05-29 | 2011-10-26 | 東芝エレベータ株式会社 | 群管理エレベータの制御装置 |
| FI112063B (fi) * | 2000-07-14 | 2003-10-31 | Kone Corp | Menetelmä liikenteen kontrolloimiseksi vaihtotasolla |
| EP1193207A1 (de) * | 2000-09-20 | 2002-04-03 | Inventio Ag | Verfahren zur Steuerung einer Aufzugsanlage mit Mehrfachkabinen. |
| US6439349B1 (en) * | 2000-12-21 | 2002-08-27 | Thyssen Elevator Capital Corp. | Method and apparatus for assigning new hall calls to one of a plurality of elevator cars |
| JP4982920B2 (ja) * | 2001-02-01 | 2012-07-25 | フジテック株式会社 | マルチカー方式エレベータ |
| FI112062B (fi) * | 2002-03-05 | 2003-10-31 | Kone Corp | Menetelmä matkustajien allokoimiseksi hissiryhmässä |
| JP4108082B2 (ja) * | 2002-05-30 | 2008-06-25 | 三菱電機株式会社 | エレベータの群管理制御装置 |
| SG108324A1 (en) * | 2002-11-06 | 2005-01-28 | Inventio Ag | Control device and control method for a lift installation with multiple cage |
| SG134995A1 (en) * | 2002-11-06 | 2007-09-28 | Inventio Ag | Method of and device for controlling a lift installation with zonal control |
| US6808049B2 (en) * | 2002-11-13 | 2004-10-26 | Mitsubishi Electric Research Laboratories, Inc. | Optimal parking of free cars in elevator group control |
| US6976560B2 (en) * | 2003-04-12 | 2005-12-20 | William Newby | Service/equipment equalization destination system for elevators |
| US7152714B2 (en) * | 2003-05-19 | 2006-12-26 | Otis Elevator Company | Elevator car separation based on response time |
| US7014015B2 (en) * | 2003-06-24 | 2006-03-21 | Mitsubishi Electric Research Laboratories, Inc. | Method and system for scheduling cars in elevator systems considering existing and future passengers |
| FI113531B (fi) * | 2003-06-30 | 2004-05-14 | Kone Corp | Sisääntuloruuhkan tunnistaminen |
| US7233861B2 (en) * | 2003-12-08 | 2007-06-19 | General Motors Corporation | Prediction of vehicle operator destinations |
| JP4892357B2 (ja) * | 2004-01-29 | 2012-03-07 | オーチス エレベータ カンパニー | エレベータの省エネ運行管理 |
| JPWO2006092865A1 (ja) * | 2005-03-03 | 2008-08-07 | 三菱電機株式会社 | トリプルデッキエレベータ用設備計画支援装置 |
| WO2007014477A2 (de) | 2005-08-04 | 2007-02-08 | Inventio Ag | Verfahren zur zuteilung eines benutzers zu einer aufzugsanlage |
| US7549517B2 (en) * | 2005-08-29 | 2009-06-23 | Otis Elevator Company | Elevator car dispatching including passenger destination information and a fuzzy logic algorithm |
| FI118215B (fi) * | 2005-09-27 | 2007-08-31 | Kone Corp | Hissijärjestelmä |
| FI118381B (fi) | 2006-06-19 | 2007-10-31 | Kone Corp | Hissijärjestelmä |
| KR101088283B1 (ko) * | 2006-06-27 | 2011-12-01 | 미쓰비시덴키 가부시키가이샤 | 엘리베이터 그룹 관리 제어 장치 및 방법 |
| DE102006046059B4 (de) * | 2006-09-27 | 2020-11-19 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Verfahren zum Steuern eines Aufzug- oder ähnlichen Beförderungssystems |
| DE102006046062B4 (de) | 2006-09-27 | 2018-09-06 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Verfahren zum Steuern eines Aufzug- oder ähnlichen Beförderungssystems |
| JP5107343B2 (ja) * | 2007-03-29 | 2012-12-26 | 三菱電機株式会社 | エレベータシステム |
| EP2011759A1 (de) * | 2007-07-03 | 2009-01-07 | Inventio Ag | Vorrichtung und Verfahren zum Betrieb eines Aufzugs |
| ES2391233T3 (es) * | 2007-08-06 | 2012-11-22 | Thyssenkrupp Elevator Capital Corporation | Control para limitar la presión timpánica de un pasajero de ascensor y método para lo mismo |
| US8151943B2 (en) * | 2007-08-21 | 2012-04-10 | De Groot Pieter J | Method of controlling intelligent destination elevators with selected operation modes |
| FI119686B (fi) * | 2007-10-11 | 2009-02-13 | Kone Corp | Hissijärjestelmä |
| EP2376359B1 (en) | 2008-12-19 | 2015-01-21 | Otis Elevator Company | Elevator door frame with electronics housing |
| EP2208701A1 (de) * | 2009-01-16 | 2010-07-21 | Inventio Ag | Verfahren zur Steuerung einer Aufzugsanlage |
| ES2347118B1 (es) * | 2009-04-24 | 2011-06-16 | Smartlift, S.L. | Metodo para el control de destino en bateria de ascensores. |
| ES2352778B1 (es) * | 2009-08-06 | 2011-09-23 | Smartlift, S.L | Método para el control de tráfico en conjunto de ascensores. |
| WO2011055414A1 (ja) * | 2009-11-09 | 2011-05-12 | 三菱電機株式会社 | ダブルデッキエレベータ群管理装置 |
| KR101403998B1 (ko) * | 2010-02-19 | 2014-06-05 | 오티스 엘리베이터 컴파니 | 리디렉터 정보를 통합한 엘리베이터 디스패칭 시스템에서의 최적 그룹 선택 |
| JP5639668B2 (ja) * | 2010-02-26 | 2014-12-10 | オーチス エレベータ カンパニーOtis Elevator Company | 群スコア情報を取り入れたエレベータ配車システムにおける最良の群の選択 |
| EP2621847B1 (en) * | 2010-09-30 | 2017-02-08 | Kone Corporation | Elevator system |
| WO2012140758A1 (ja) * | 2011-04-14 | 2012-10-18 | 三菱電機株式会社 | エレベーターの群管理システム |
| GB2507216A (en) | 2011-07-15 | 2014-04-23 | Otis Elevator Co | Elevator car assignment strategy that limits a number of stops per passenger |
| FI122988B (fi) * | 2011-08-26 | 2012-09-28 | Kone Corp | Hissijärjestelmä |
| KR101734423B1 (ko) * | 2011-09-08 | 2017-05-11 | 오티스엘리베이터캄파니 | 동적인 통행 프로파일 해법을 가진 엘리베이터 시스템 |
| WO2013080242A1 (ja) * | 2011-11-28 | 2013-06-06 | 三菱電機株式会社 | エレベータ群管理装置 |
| AU2012384008B2 (en) * | 2012-06-27 | 2017-05-25 | Kone Corporation | Method and system for measuring traffic flow in a building |
| EP2867150B1 (en) * | 2012-06-27 | 2018-08-08 | KONE Corporation | Position and load measurement system for an elevator |
| CN104470843B (zh) * | 2012-07-18 | 2016-07-20 | 三菱电机株式会社 | 电梯装置 |
| WO2014041242A1 (en) * | 2012-09-11 | 2014-03-20 | Kone Corporation | Elevator system |
| CN105492359B (zh) | 2013-08-30 | 2018-04-17 | 通力股份公司 | 多层板电梯分配控制 |
| US9440818B2 (en) | 2014-01-17 | 2016-09-13 | Thyssenkrupp Elevator Corporation | Elevator swing operation system and method |
| DE102014214587A1 (de) | 2014-07-24 | 2016-01-28 | Thyssenkrupp Ag | Verfahren zum Steuern einer Aufzugsanlage |
| CN104310164B (zh) * | 2014-08-26 | 2016-03-16 | 浙江大学城市学院 | 医院的电梯交通配置方法 |
| WO2016092144A1 (en) * | 2014-12-10 | 2016-06-16 | Kone Corporation | Transportation device controller |
| EP3472083A4 (en) * | 2016-06-17 | 2020-04-29 | KONE Corporation | CALCULATION OF ALLOCATION DECISIONS IN AN ELEVATOR SYSTEM |
| WO2018050947A1 (en) * | 2016-09-13 | 2018-03-22 | Kone Corporation | Managing elevator cars in a multi-car elevator shaft system |
| CN108007459A (zh) * | 2016-10-31 | 2018-05-08 | 腾讯科技(深圳)有限公司 | 楼宇中的导航实现方法和装置 |
| JP6742962B2 (ja) * | 2017-07-24 | 2020-08-19 | 株式会社日立製作所 | エレベーターシステム、画像認識方法及び運行制御方法 |
| US11242225B2 (en) | 2018-03-15 | 2022-02-08 | Otis Elevator Company | Adaptive elevator door dwell time |
| EP3560870A3 (en) | 2018-04-24 | 2019-11-20 | Otis Elevator Company | Automatic cognitive analysis of elevators to reduce passenger wait time |
| US11345566B2 (en) * | 2018-07-30 | 2022-05-31 | Otis Elevator Company | Elevator car route selector |
| DE102018213573B4 (de) * | 2018-08-13 | 2020-03-19 | Thyssenkrupp Ag | Aufzuganlage sowie Verfahren zum Betreiben einer Aufzuganlage |
| CN109626150A (zh) * | 2018-11-14 | 2019-04-16 | 深圳壹账通智能科技有限公司 | 电梯调配方法及系统 |
| CN109384109B (zh) * | 2018-12-26 | 2020-08-14 | 福州快科电梯工业有限公司 | 空间立体交互式电梯调度方法 |
| CN110304503B (zh) * | 2019-07-24 | 2021-05-25 | 上海三菱电梯有限公司 | 电梯换乘系统 |
| CN114314234B (zh) * | 2021-12-28 | 2023-10-03 | 上海三菱电梯有限公司 | 电梯客流模式识别方法 |
| CN115402891A (zh) * | 2022-07-28 | 2022-11-29 | 中国电信股份有限公司 | 一种电梯群的控制方法、装置、电子设备和存储介质 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CH660585A5 (de) * | 1983-08-12 | 1987-05-15 | Inventio Ag | Gruppensteuerung fuer aufzuege mit doppelkabinen. |
| US4632224A (en) | 1985-04-12 | 1986-12-30 | Otis Elevator Company | Multicompartment elevator call assigning |
| FI85970C (fi) * | 1986-09-24 | 1992-06-25 | Kone Oy | Foerfarande foer koordinering av hissgrupper. |
| EP0301178B1 (de) * | 1987-07-13 | 1991-06-26 | Inventio Ag | Steuereinrichtung für eine Aufzugsanlage |
| ATE68770T1 (de) | 1987-10-20 | 1991-11-15 | Inventio Ag | Gruppensteuerung fuer aufzuege mit lastabhaengiger steuerung der kabinen. |
| US4793443A (en) * | 1988-03-16 | 1988-12-27 | Westinghouse Electric Corp. | Dynamic assignment switching in the dispatching of elevator cars |
| US5024295A (en) | 1988-06-21 | 1991-06-18 | Otis Elevator Company | Relative system response elevator dispatcher system using artificial intelligence to vary bonuses and penalties |
| ATE96124T1 (de) | 1988-10-28 | 1993-11-15 | Inventio Ag | Verfahren und einrichtung zur gruppensteuerung von aufzuegen mit doppelkabinen. |
| FI91238C (fi) | 1989-11-15 | 1994-06-10 | Kone Oy | Hissiryhmän ohjausmenetelmä |
| ES2062606T3 (es) | 1990-06-01 | 1994-12-16 | Inventio Ag | Mando de grupo para ascensores con cabinas dobles con asignacion inmediata de llamadas de destino. |
| GB2266602B (en) * | 1992-04-16 | 1995-09-27 | Inventio Ag | Artificially intelligent traffic modelling and prediction system |
| JP3454899B2 (ja) * | 1993-04-07 | 2003-10-06 | オーチス エレベータ カンパニー | エレベータシステムの負荷重量側路しきい値の自動選択装置及び方法 |
| FI108716B (fi) | 1993-11-11 | 2002-03-15 | Kone Corp | Menetelmä hissiryhmän ohjaamiseksi |
| US5625176A (en) * | 1995-06-26 | 1997-04-29 | Otis Elevator Company | Crowd service enhancements with multi-deck elevators |
| JPH10212078A (ja) * | 1997-01-29 | 1998-08-11 | Toshiba Corp | ダブルデッキエレベーター群管理制御装置 |
| JP3889108B2 (ja) * | 1997-02-28 | 2007-03-07 | 東芝エレベータ株式会社 | 乗り場機器パラメータ設定装置 |
| US5844179A (en) * | 1997-11-26 | 1998-12-01 | Otis Elevator Company | Method of operation for double-deck elevator system |
| US5861587A (en) * | 1997-11-26 | 1999-01-19 | Otis Elevator Company | Method for operating a double deck elevator car |
-
1997
- 1997-01-23 FI FI970282A patent/FI111929B/fi not_active IP Right Cessation
-
1998
- 1998-01-23 EP EP98901361A patent/EP0895506B1/en not_active Expired - Lifetime
- 1998-01-23 DE DE69802876T patent/DE69802876T2/de not_active Expired - Lifetime
- 1998-01-23 ES ES98901361T patent/ES2166139T3/es not_active Expired - Lifetime
- 1998-01-23 JP JP53164698A patent/JP4098366B2/ja not_active Expired - Lifetime
- 1998-01-23 CA CA002249304A patent/CA2249304C/en not_active Expired - Lifetime
- 1998-01-23 CN CN98800221A patent/CN1087708C/zh not_active Expired - Lifetime
- 1998-01-23 KR KR1019980707538A patent/KR100311931B1/ko not_active IP Right Cessation
- 1998-01-23 AU AU57673/98A patent/AU728556B2/en not_active Expired
- 1998-01-23 US US09/155,154 patent/US6237721B1/en not_active Expired - Lifetime
- 1998-01-23 WO PCT/FI1998/000065 patent/WO1998032683A1/en active IP Right Grant
- 1998-01-23 BR BRPI9804765-5B1A patent/BR9804765B1/pt not_active IP Right Cessation
-
2001
- 2001-01-30 US US09/771,597 patent/US6401874B2/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| CA2249304A1 (en) | 1998-07-30 |
| EP0895506A1 (en) | 1999-02-10 |
| AU728556B2 (en) | 2001-01-11 |
| FI970282A0 (fi) | 1997-01-23 |
| US6401874B2 (en) | 2002-06-11 |
| BR9804765B1 (pt) | 2013-12-31 |
| FI970282A (fi) | 1998-07-24 |
| KR20000064768A (ko) | 2000-11-06 |
| FI111929B (fi) | 2003-10-15 |
| ES2166139T3 (es) | 2002-04-01 |
| WO1998032683A1 (en) | 1998-07-30 |
| US6237721B1 (en) | 2001-05-29 |
| JP2000507196A (ja) | 2000-06-13 |
| CA2249304C (en) | 2005-03-29 |
| AU5767398A (en) | 1998-08-18 |
| BR9804765A (pt) | 1999-08-17 |
| DE69802876D1 (de) | 2002-01-24 |
| DE69802876T2 (de) | 2002-06-13 |
| EP0895506B1 (en) | 2001-12-12 |
| KR100311931B1 (ko) | 2001-12-17 |
| US20010002636A1 (en) | 2001-06-07 |
| CN1087708C (zh) | 2002-07-17 |
| CN1217700A (zh) | 1999-05-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4098366B2 (ja) | エレベータ群の制御 | |
| JP2935854B2 (ja) | エレベーター制御装置及びエレベーター制御方法 | |
| US7694781B2 (en) | Elevator call allocation and routing system | |
| JP3042905B2 (ja) | エレベータ運行の「アップピーク」の開始時刻を決定する方法 | |
| EP2183177B1 (en) | Method and apparatus to reduce waiting times for destination based dispatching systems | |
| JP2509727B2 (ja) | エレベ―タの群管理装置及び群管理方法 | |
| EP1021368B1 (en) | Procedure for controlling an elevator group where virtual passenger traffic is generated | |
| EP0385811A1 (en) | "Artificial Intelligence" based crowd sensing system for elevator car assignment | |
| EA023522B1 (ru) | Лифтовая система | |
| JPH02110088A (ja) | エレベータの群管理装置 | |
| CN110775744B (zh) | 多轿厢电梯以及多轿厢电梯控制方法 | |
| US5241142A (en) | "Artificial intelligence", based learning system predicting "peak-period" ti | |
| CN112209188B (zh) | 电梯的群管理系统 | |
| JPH08198529A (ja) | ダブルデッキエレベーターの制御装置 | |
| JP3893638B2 (ja) | エレベータの群管理装置 | |
| Thangavelu | Artificial intelligence based learning system predicting ‘peak-period’times for elevator dispatching | |
| Thangavelu et al. | Artificial intelligence", based learning system predicting" peak-period" ti |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040721 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20061114 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070214 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070605 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20070904 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20071015 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071004 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080219 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080313 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110321 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120321 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130321 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130321 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140321 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |