JP3627575B2 - 車両用追従制御装置 - Google Patents
車両用追従制御装置 Download PDFInfo
- Publication number
- JP3627575B2 JP3627575B2 JP18649799A JP18649799A JP3627575B2 JP 3627575 B2 JP3627575 B2 JP 3627575B2 JP 18649799 A JP18649799 A JP 18649799A JP 18649799 A JP18649799 A JP 18649799A JP 3627575 B2 JP3627575 B2 JP 3627575B2
- Authority
- JP
- Japan
- Prior art keywords
- mode
- vehicle
- control
- follow
- transition
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K31/00—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator
- B60K31/0008—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator including means for detecting potential obstacles in vehicle path
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K31/00—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator
- B60K31/02—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator including electrically actuated servomechanism including an electric control system or a servomechanism in which the vehicle velocity affecting element is actuated electrically
- B60K31/04—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator including electrically actuated servomechanism including an electric control system or a servomechanism in which the vehicle velocity affecting element is actuated electrically and means for comparing one electrical quantity, e.g. voltage, pulse, waveform, flux, or the like, with another quantity of a like kind, which comparison means is involved in the development of an electrical signal which is fed into the controlling means
- B60K31/042—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator including electrically actuated servomechanism including an electric control system or a servomechanism in which the vehicle velocity affecting element is actuated electrically and means for comparing one electrical quantity, e.g. voltage, pulse, waveform, flux, or the like, with another quantity of a like kind, which comparison means is involved in the development of an electrical signal which is fed into the controlling means where at least one electrical quantity is set by the vehicle operator
- B60K31/045—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator including electrically actuated servomechanism including an electric control system or a servomechanism in which the vehicle velocity affecting element is actuated electrically and means for comparing one electrical quantity, e.g. voltage, pulse, waveform, flux, or the like, with another quantity of a like kind, which comparison means is involved in the development of an electrical signal which is fed into the controlling means where at least one electrical quantity is set by the vehicle operator in a memory, e.g. a capacitor
- B60K31/047—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator including electrically actuated servomechanism including an electric control system or a servomechanism in which the vehicle velocity affecting element is actuated electrically and means for comparing one electrical quantity, e.g. voltage, pulse, waveform, flux, or the like, with another quantity of a like kind, which comparison means is involved in the development of an electrical signal which is fed into the controlling means where at least one electrical quantity is set by the vehicle operator in a memory, e.g. a capacitor the memory being digital
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/10—Change speed gearings
- B60W2710/105—Output torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
- B60W2720/106—Longitudinal acceleration
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/66—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Controls For Constant Speed Travelling (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Traffic Control Systems (AREA)
- Hybrid Electric Vehicles (AREA)
- Auxiliary Drives, Propulsion Controls, And Safety Devices (AREA)
- Regulating Braking Force (AREA)
Description
【発明の属する技術分野】
本発明は、先行車両との車間距離を目標車間距離に維持しながら先行車両に追従する走行制御を行うようにした車両用追従制御装置に関する。
【0002】
【従来の技術】
従来の車両用追従制御装置としては、例えば特開平7−47862号公報に記載されたものがある。
この従来例には、運転者がセットスイッチを押すと、アクセルペダルを解放しても、先行車両が存在する場合には適切な車間距離を保持して走行し、先行車両が存在しない場合には設定した車速を維持しながら走行する追従制御状態となり、この追従制御状態を運転者がブレーキやアクセルを操作したり、シフト操作をしたときに解除するようにしている。このような追従制御は、主に高速走行時の運転操作の軽減を目的としているが、低速走行や停止、発進の操作を自動的に行うことも要求されており、また、目標車速の設定は追従走行中に行うようにしている。
【0003】
【発明が解決しようとする課題】
しかしながら、上記従来の車両用追従制御装置にあっては、運転者がブレーキを操作することにより、追従制御状態が解除されるように構成されているので、停止状態から制御を開始したい場合には、一旦ブレーキを解放してから追従制御をセットしなければならないため、その操作が不便であるという未解決の課題がある。
【0004】
また、キャンセルスイッチ等で追従制御を解除したときに、制動力が作用している場合では、制動力を全て解除してしまい、下り坂で自動停止しているときに制御解除した場合には先行車両に近づいてしまい運転者に違和感を与えるという未解決の課題もある。
さらに、目標車速の設定・変更は、追従制御を行っているときにしか行えないため、セットスイッチを押して追従制御状態となった後に、レジュームスイッチ等で目標車速を変更する必要があり、これが不便であるという未解決の課題がある。
【0005】
そこで、本発明は、上記従来例の未解決の課題に着目してなされたものであり、停止状態での追従制御の設定が可能であると共に、追従制御解除に運転者に違和感を与えることがなく、さらに目標車速の設定・変更を任意に行うことができる車両用追従制御装置を提供することを目的としている。
【0006】
【課題を解決するための手段】
上記目的を達成するために、請求項1に係る車両用追従走行制御装置は、自車両の車速を検出する車速検出手段と、先行車両との車間距離を検出する車間距離検出手段と、該車間距離検出手段で検出した車間距離を目標車間距離に一致させる車間制御及び前記車速検出手段で検出した自車速を設定車速に一致させる車速制御の何れかを行う追従制御手段とを備えた車両用追従制御装置において、追従制御の開始を指示する開始指示手段を備え、前記追従制御手段は、制御待機モード、自動停止モード、追従モード及び制御解除モードの4つの制御モードを有し、前記開始指示手段からの開始指示により前記制御待機モードとなり、該制御待機モードから自動停止モードへの遷移は、自動変速機がドライブレンジにあり、且つ停車中であることを条件として行われ、前記制御待機モードから追従モードへの遷移は、自動変速機がドライブレンジであり、且つ運転者が制動装置を非作動状態としたことを条件として行われ、前記自動停止モードから追従モードへの遷移は、先行車両が自動停止モードに移行したときの位置から所定量前方に移動したことを条件として行われ、前記追従モードから自動停止モードへの遷移は、先行車両との車間距離が所定値以下であり、且つ車速が所定値以下であることを条件として行われ、前記自動停止モードから制御解除モードへの遷移は、運転者の操舵量が所定値以上となったとき及びレンジ変更を行ったときの何れかを条件として行われ、前記制御解除モードから自動停止モードへの遷移は、自車両が停止し、且つ自動変速機がドライブレンジであることを条件として行われ、前記追従モードから制御解除モードへの遷移は、運転者による加減速操作及びレンジ変更の何れかが行われることを条件として行われ、前記制御解除モードから追従モードへの遷移は、自車両が走行しており、且つ自動変速機がドライブレンジであることを条件として行われ、前記制御解除モードから制御待機モードへの遷移は、運転者が駆動力及び制動力の少なくとも一方を操作したことを条件として行われることを特徴としている。
【0007】
この請求項1に係る発明においては、開始指示手段で、追従制御の開始を指示することにより、制御待機モードとなる。この制御待機モードで、ドライブレンジが選択されている状態で、自車両が停車中であるときには自動停止モードに遷移して、そのときの制動力が維持され、自車両が走行中であるときには追従モードに遷移して、車間距離又は設定車速に基づく追従制御が行われる。このとき、制御待機モードから自動停止モード又は追従モードへの遷移する条件として、セットスイッチをオン状態とすることを付加するようにしてもよい。
【0008】
また、自動停止モードで、先行車両が前方に所定量移動すると、追従モードに遷移し、解除指示をするか所定値以上の操舵量となるか、自動変速機をドライブレンジ以外のレンジに変更することにより、制御解除モードに遷移し、自動停止モードでの制動力が保持されるが駆動力制御が停止されることにより、自車両は停車状態を維持する。この状態で、運転者がアクセルペダル又はブレーキペダルを踏込んで運転者の意志による駆動力又は制動力を発生させると、制御待機モードに復帰する。
【0009】
追従モードで、車間距離が所定値以下となり、且つ自車速が所定値以下となったときは自動停止モードに遷移し、運転者による加減速操作又はレンジ変更が行われると、制御待機モードに遷移する。
【0010】
また、請求項2に係る発明に車両用追従制御装置は、請求項1に係る発明において、前記自動停止モードは、制動装置で所定の制動力を発生させて停止状態を保持するように設定され、前記追従モードは、目標車速の設定・変更を行うと共に、先行車両との車間距離に基づく目標車速及び運転者が設定した設定車速の少なくとも一方に応じて駆動力及び制動力の少なくとも一方を制御するように設定され、前記制御解除モードは、前記追従モードで発生させている制動力を保持し、且つ駆動力制御を停止させるように設定されていることを特徴としている。
【0011】
この請求項2に係る発明においては、自動停止モードで自車両の停止状態を保持し、追従制御モードで先行車両との車間距離又は運転者が設定した設定車速の少なくとも一方に応じて駆動力及び/又は制動力を制御して加減速制御を行い、制御解除モードでは、追従モード又は自動停止モードでの制動力を保持することにより、モード変更時の制動力変化を防止すると共に、駆動力制御を停止させる。
【0015】
さらにまた、請求項3に係る車両用追従制御装置は、請求項1又は2の発明において、前記自動停止モードは、設定車速の設定・変更が可能に設定されていることを特徴としている。
【0016】
この請求項3に係る発明においては、自動停止モードで、設定車速の設定・変更が可能となるので、その後発進して追従モードとなったときに設定車速を設定又は変更する手間を省くことができる。
なおさらに、請求項4に係る車両用追従制御装置は、請求項1〜3の何れかの発明において、前記制御待機モードは、設定車速の設定・変更が可能に設定されていることを特徴としている。
【0017】
この請求項4に係る発明においては、メインスイッチ等の開始指示手段で開始指示を行って制御待機モードとした状態で、設定車速を設定又は変更できるので、追従モードでの設定車速の設定又は変更する手間を省くことができる。
また、請求項5に係る車両用追従制御装置は、請求項1〜4の何れかの発明において、前記制御待機モードから自動停止モードへの遷移は、自車両が停止状態で且つ運転者が制動力を発生させているときを条件として行われることを特徴としている。
【0018】
この請求項5に係る発明においては、運転者が制動力を発生させて停車している状態で、開始指示手段で開始指示を行って制御待機モードとすることにより、直ちに自動停止モードへ遷移させることができ、煩わしい設定操作を省略することができる。
さらに、請求項6に係る車両用追従制御装置は、請求項1〜5の何れかの発明において、前記制御解除モードから制御待機モードへの遷移は、運転者により制動力を増加させる操作を行ったことを条件として行われることを特徴としている。
【0019】
この請求項6に係る発明においては、追従モードで制動力が発生されている状態ではその制動力を保持し続け、運転者がブレーキ操作して制動力を増加させない限り、制動力を保持することになり、不用意に制動力が変化することを確実に防止する。
さらにまた、請求項7に係る車両用追従制御装置は、請求項1〜6の何れかの発明において、前記制御解除モードは、追従モードでの制動力を徐々に減少させるように設定され、当該制御解除モードから制御待機モードへの遷移は、制動力が所定値以下となったことを条件として行われることを特徴としている。
【0020】
この請求項7に係る発明においては、運転者が誤って制御解除モードを選択した場合に、追従モードでの制動力を徐々に減少させることにより、運転者に制動力解除を認識させながら急な車両挙動の変化を防止する。
なおさらに、請求項8に係る車両用追従制御装置は、請求項1〜6の何れかの発明において、前記制御解除モードは、先行車両との車間距離、先行車両の有無及び自車速の少なくとも1つに応じて、制動力を徐々に減少させる減少制御及び制動力を保持する保持制御の何れかを行うように設定され、当該制御解除モードから制御待機モードへの遷移は、制動力が所定値以下となること及び運転者が制動力又は駆動力を操作したことの何れかを条件として行われることを特徴としている。
【0021】
この請求項8に係る発明においては、制御解除モードとなったときに、制動力が徐々に減少するか又は保持され、この制動力が所定値以下となるか、又は運転者がアクセル又はブレーキ操作を行ったときに制御待機モードに遷移することになり、運転者が制動力解除を認識することができると共に、運転者の意志によって制御待機モードに遷移させる。
【0022】
また、請求項9に係る車両用追従制御装置は、請求項1〜8の何れかの発明において、前記制御待機モードから追従モードへの遷移は、自動変速機がドライブレンジで運転者が制動力を操作していない状態で、先行車両との車間距離、自車速及び先行車両の速度又は先行車両との相対速度の関係により成立する条件を満足するときに行われることを特徴としている。
【0023】
この請求項9に係る発明においては、先行車両との車間距離と自車速と先行車両の車速又は先行車速との相対速度との関係から追従モードに遷移した場合に、最大減速度を発生させても先行車両に接近してしまう状況では、追従モードへの遷移を防止して、運転者に違和感を与えることを防止する。
【0024】
【発明の効果】
請求項1に係る発明によれば、開始指示手段で開始指示を行うことにより、制御待機モードとなり、この制御待機モードから所定条件を満足することにより、運転者が制動操作をしているか否かによって自動停止モード又は追従モードに遷移することが可能に構成されているので、制御待機モードとすることにより、追従制御が可能となり、開始指示手段によって任意の時点で追従制御を開始させることができるという効果が得られる。
しかも、制御待機モード、自動停止モード、追従モード及び制御解除モード間の各遷移条件が規定されているので、車両の走行状況に応じた最適な制御モードを選択して、最適な追従制御を行うことができるという効果が得られる。
【0025】
また、請求項2に係る発明によれば、自車両の停止状態を保持する自動停止モード及び先行車両との車間距離又は運転者が設定した設定車速の少なくとも一方に応じて駆動力及び/又は制動力を制御して加減速制御を行う追従制御モードから遷移可能な制御解除モードで、追従モード又は自動停止モードでの制動力を保持することにより、モード変更時の制動力変化を防止すると共に、駆動力制御を停止させるので、例えば下り坂で自動停止モードで所定制動力を発生して停止している状態又は追従モードで先行車両の減速や割込等によって制動力を発生している状態で、制御解除モードに遷移したときに、制動力が確保されることにより、先行車両に接近して運転者に違和感を与えることを確実に防止することができるという効果が得られる。
【0026】
さらにまた、請求項3に係る発明によれば、自動停止モードで、設定車速の設定・変更が可能となるので、従来例のようにその後発進して追従モードとなるまで設定車速の設定又は変更を待つ必要がなく、設定車速の設定又は変更を運転者の負担となることなく容易に行うことができるという効果が得られる。
【0027】
なおさらに、請求項4に係る発明によれば、メインスイッチ等の開始指示手段で開始指示を行って制御待機モードとした状態で、設定車速を設定又は変更できるので、設定車速の設定又は変更を追従モードとなるまで待つ必要がなく、設定車速の設定又は変更を運転者の負担となることなく容易に行うことができるという効果が得られる。
【0028】
また、請求項5に係る発明によれば、運転者が制動力を発生させて停車している状態で、開始指示手段で開始指示を行って制御待機モードとすることにより、直ちに自動停止モードへ遷移させることができ、煩わしい設定操作を省略することができるという効果が得られる。
さらに、請求項6に係る発明によれば、追従モードで制動力が発生されている状態ではその制動力を保持し続け、運転者がブレーキ操作して制動力を増加させない限り、制動力を保持することになり、不用意に制動力が変化することを確実に防止して、運転者に違和感を与えることを確実に防止することかできるとうい効果が得られる。
【0029】
さらにまた、請求項7に係る発明によれば、運転者が誤って制御解除モードを選択した場合に、追従モードでの制動力を徐々に減少させることにより、運転者に制動力解除を認識させながら急な車両挙動の変化を防止することができるという効果が得られる。
なおさらに、請求項8に係る発明によれば、制御解除モードとなったときに、制動力が徐々に減少するか又は保持され、この制動力が所定値以下となるか、又は運転者がアクセル又はブレーキ操作を行ったときに制御待機モードに遷移することになり、運転者が制動力解除を認識することができると共に、運転者の意志によって制御待機モードに遷移させることができるという効果が得られる。
【0030】
また、請求項9に係る発明によれば、先行車両との車間距離と自車速と先行車両の車速又は先行車速との相対速度との関係から追従モードに遷移した場合に、最大減速度を発生させても先行車両に接近してしまう状況では、追従モードへの遷移を防止して、運転者に違和感を与えることを防止することができるという効果が得られる。
【0031】
【発明の実施の形態】
以下、本発明の実施形態を図面に基づいて説明する。
図1は本発明を後輪駆動車に適用した場合の第1の実施形態を示す概略構成図であり、図中、1FL,1FRは従動輪としての前輪、1RL,1RRは駆動輪としての後輪であって、後輪1RL,1RRは、エンジン2の駆動力が自動変速機3、プロペラシャフト4、最終減速装置5及び車軸6を介して伝達されて回転駆動される。
【0032】
前輪1FL,1FR及び後輪1RL,1RRには、夫々制動力を発生するディスクブレーキ7が設けられていると共に、これらディスクブレーキ7の制動油圧が制動制御装置8によって制御される。
ここで、制動制御装置8は、図示しないブレーキペダルの踏込みに応じて制動油圧を発生すると共に、走行制御用コントローラ30からの目標制動圧PB * に応じて制動油圧を発生するように構成されている。
【0033】
また、エンジン2には、その出力を制御するエンジン出力制御装置9が設けられている。このエンジン出力制御装置9では、エンジン出力の制御方法として、スロットルバルブの開度THを調整してエンジン回転数を制御する方法と、アイドルコントロールバルブの開度を調整してエンジン2のアイドル回転数を制御する方法とが考えられるが、本実施形態では、スロットルバルブの開度を調整する方法が採用されている。
【0034】
さらに、自動変速機3には、その変速位置を制御する変速機制御装置10が設けられている。この変速機制御装置10は、後述する走行制御用コントローラ30からのアップ/ダウンシフト指令値TSが入力されると、これに応じて自動変速機3の変速位置をアップシフト又はダウンシフト制御するように構成されている。
【0035】
一方、車両の前方側の車体下部には、先行車両との間の車間距離を検出する車間距離検出手段としてのレーザ光を掃射して先行車両からの反射光を受光するレーダ方式の構成を有する車間距離センサ12が設けられている。
また、車両には、例えば従動輪となる前輪1FL及び1FRに取付けられた車輪速度を検出する車輪速センサ13FL及び13FRと、アクセルペダル14の踏込みを検出するアクセルスイッチ15と、ブレーキペダル16の踏込みを検出するブレーキスイッチ17と、制動制御装置8から出力される制動圧を検出する制動圧センサ18と、ステアリングホイール(図示せず)の操舵角θを検出する操舵角センサ19と、追従制御を行うか否かを選択する開始指示手段としてのメインスイッチSWM 、セットスイッチSWS 及び解除指示手段としてのキャンセルスイッチSWC と、セレクトレバーでドライブレンジを選択したときにオン状態となるドライブレンジ検出スイッチSWD が配設されている。
【0036】
ここで、メインスイッチSWM は、一端がイグニッションスイッチSWIGを介してバッテリBに接続された、運転者の意志によって操作されるモーメンタリ式の切換スイッチ20と、自己保持型のリレー回路21とで構成されている。
切換スイッチ20は、オフ位置であるときに、スイッチ信号SIGが入力される第1の入力端子ti1と出力端子to との間が遮断状態となり、中立位置であるときにリレー回路21からの電源が入力される第2の入力端子ti2と出力端子to とが接続状態となり、オン位置であるときに第1及び第2の入力端子ti1及びti2と出力端子to とが接続状態となるように構成されている。
【0037】
リレー回路21は、常開接点s1とこれを駆動するリレーコイルRLとを有し、常開接点s1はその一端がイグニッションスイッチSWIGに接続され、且つ他端が直接及びセットスイッチSWS を介して後述する追従制御用コントローラ20に接続されていると共に、切換スイッチ20の第2の入力端子ti2に接続され、リレーコイルRLはその一端が切換スイッチ20の出力端子to に接続されると共に、他端が接地されている。
【0038】
そして、車間距離センサ12、車輪速センサ13FL,13FR、アクセルスイッチ15、ブレーキスイッチ17、制動圧センサ18及び操舵角センサ19の各検出信号並びに追従制御を行うか否かを選択するメインスイッチSWM 、セットスイッチSWS 、キャンセルスイッチSWC のスイッチ信号SM 、SSET 、SCAN 及びドライブレンジ検出スイッチSWD のスイッチ信号SDRが追従制御用コントローラ30に入力され、この追従制御用コントローラ30によって、図2に示す追従制御の遷移状態を示す状態図に従って、制御待機モードWM、所定の制動力を保持して自車両を停止状態に保持する自動停止モードSM、先行車両を車間距離センサ12で捕捉していないときには自車速Vsを設定車速VSET で一致させ、先行車両を捕捉しているときには車間距離センサ12で検出した実車間距離Lを目標車間距離L* に一致させるように、制動制御装置8、エンジン出力制御装置9及び変速機制御装置10を制御して車速制御を行う追従モードFM及び自動停止モードSM及び追従モードFMを解除するがこれらで発生している制動力を保持する制御解除モードRMの4つの制御モードに所定遷移条件に従って制御される。
【0039】
すなわち、メインスイッチSWM をオン状態とすることにより、追従制御用コントローラ30で制御中止状態から制御待機モードWMとなり、この制御待機モードWMで、自動変速機がドライブレンジにあり、且つ停車中であり、さらにセットスイッチSWS がオン状態である第1条件が成立すると自動停止モードSMに遷移し、自動変速機がドライブレンジであり、且つブレーキスイッチ17がオフ状態であり、さらにセットスイッチSWS がオン状態である第2条件が成立すると追従モードFMに遷移する。
【0040】
また、自動停止モードSMで、先行車両が自動停止モードに移行したときの位置から所定量前方に移動したことの第3条件が成立すると追従モードFMに移行し、追従モードFMから先行車両との車間距離Lが所定値以下で且つ自車速が所定値以下である第4条件が成立すると自動停止モードSMに遷移する。
さらに、自動停止モードSMで、キャンセルスイッチSWC をオン状態とした時、操舵角センサ19で検出した操舵角θが所定値以上となった時及び自動変速機3をドライブレンジ以外のレンジに変更した時の何れかでなる第5条件が成立すると制御解除モードRMに遷移し、この制御解除モードRMで、自車両が停止し、且つ自動変速機の制御レンジがドライブレンジであり、さらにセットスイッチSWS がオン状態である第6条件が成立すると自動停止モードSMに遷移する。
【0041】
さらにまた、追従モードFMで、運転者による加減速操作即ちアクセルペダルの踏込み、ブレーキペダルの踏み増し及びドライブレンジから他のレンジへの変更の何れかを行う第7条件が成立すると制御解除モードRMに遷移し、制御解除モードRMで自車両が走行しており、且つ自動変速機3がドライブレンジであり、さらにセットスイッチSWS がオン状態である第8条件が成立すると追従モードFMに遷移する。
【0042】
なおさらに、制御解除モードRMで、アクセルスイッチ15又はブレーキスイッチ17がオン状態となった第9条件が成立すると、制御待機モードWMに遷移し、制御待機モードWMでメインスイッチSWM がオフ状態となると、制御中止状態に復帰する。
次に、上記第1の実施形態の動作を追従制御用コントローラ30で実行する図3に示す追従制御処理を伴って説明する。
【0043】
この追従制御処理は、メインプログラムとして実行され、先ず、ステップS1で現在の制御モードが制御待機モードであるか否かを判定し、制御待機モードであるときには、ステップS2に移行して、制御待機モードからの遷移先を選択する遷移先選択処理を行ってから後述するステップS8に移行する。
また、前記ステップS1の判定結果が、制御待機モードWMではないときには、ステップS3に移行して、現在の制御モードが自動停止モードSMであるか否かを判定し、自動停止モードSMであるときには、ステップS4に移行して、自動停止モードからの遷移先を選択する遷移先選択処理を実行してから後述するステップS8に移行する。
【0044】
さらに、前記ステップS3の判定結果が、自動停止モードでないときには、ステップS5に移行して、現在の制御モードが追従モードFMであるか否かを判定し、追従モードFMであるときにはステップS6に移行して、追従モードからの遷移先を選択する遷移先選択処理を実行してから後述するステップS8に移行する。
【0045】
さらにまた、前記ステップS5の判定結果が、追従モードFMではないときにはステップS7に移行して、制御解除モードRMからの遷移先を選択する遷移先選択処理を実行してから後述するステップS8に移行する。
ステップS8では、前記ステップS1と同様に制御待機モードWMであるか否かを判定し、制御待機モードWMであるときには、ステップS9に移行して、制御待機モード処理を実行してから前記ステップS1に戻り、制御待機モードWMではないときには、ステップS10に移行する。
【0046】
このステップS10では、前記ステップS3と同様に自動停止モードSMであるか否かを判定し、自動停止モードであるときには、ステップS11に移行して自動停止モード処理を実行してから前記ステップS1に戻り、自動停止モードでないときには、ステップS12に移行する。
このステップS12では、前記ステップS5と同様に追従モードFMであるか否かを判定し、追従モードFMであるときにはステップS13に移行して、追従モード処理を実行してから前記ステップS1に戻り、追従モードFMではないときにはステップS14に移行して制御解除モード処理を実行してから前記ステップS1に戻る。
【0047】
そして、ステップS2の制御待機モードからの遷移先選択処理は、図4に示すように、先ず、ステップS11で、自動変速機3のレンジがドライブレンジであるか否かを判定し、これがドライブレンジ以外のレンジであるときにはステップS12に移行して、制御待機モードWMを維持してから処理を終了し、ドライブレンジであるときにはステップS13に移行する。
【0048】
このステップS13では、後述するように車輪速センサ13FL及び13FRの車輪速検出値VWFL 及びVWFR に基づいて算出される自車速Vsが“0”であるか否かを判断することにより、自車両が停止しているか否かを判定し、自車両が停止している場合には、ステップS14に移行して、ブレーキスイッチ17がオン状態であるか否かを判定し、これがオフ状態であるときには、前記ステップS12に移行し、オン状態であるときにはステップS15に移行する。
【0049】
このステップS15では、セットスイッチSWS がオン状態であるか否かを判定し、これがオフ状態であるときには前記ステップS12に移行し、オン状態であるときには、ステップS16に移行して、制御モードを自動停止モードに変更してから処理を終了する。
また、前記ステップS13の判定結果が、車両が停止状態ではない走行中であるときには、ステップS17に移行して、ブレーキスイッチ17がオン状態であるか否かを判定し、これがオン状態であるときには前記ステップS12に移行し、オフ状態であるときにはステップS18に移行して、セットスイッチSWS がオン状態であるか否かを判定し、これがオフ状態であるときには前記ステップS12に移行し、オン状態であるときには、ステップS19に移行して、現在の制御モードを追従モードFMに変更してから処理を終了する。
【0050】
ここで、ステップS11、S13〜S15で第1条件が成立しているか否かを判断し、ステップS11、S13、S17及びS18で第2条件が成立しているか否かを判断している。
また、図3の追従制御処理におけるステップS4の自動停止モードからの遷移先選択処理は、図5に示すように、先ず、ステップS21で、自動変速機3のレンジがドライブレンジ以外に変更されたか否かを判定し、レンジが変更されたときには、ステップS22に移行して、現在の制御モードを制御解除モードRMに変更してから処理を終了し、ドライブレンジを維持している場合にはステップS23に移行する。
【0051】
このステップS23では、操舵角センサ19で検出した操舵角θが所定値θs以上であるか否かを判定し、θ≧θsであるときにはステップS22に移行し、θ<θsであるときにはステップS24に移行し、制動圧センサ18で検出した制動圧PB (n) を読込み、これが前回値PB (n−1) より増加しているか否かを判定することにより、ブレーキペダル16を踏み増しているか否かを判定し、ブレーキペダル16の踏み増しているときには前記ステップS22に移行し、そうでないときにはステップS25に移行する。
【0052】
このステップS25では、先行車両が発進しているか否かを判定する。この判定は、車間距離センサ12で検出した車間距離Lが所定値ΔL以上増加したか否かによって判定し、車間距離Lの増加量が所定値ΔL未満であるときには、先行車両が停止しているものと判断してステップS26に移行し、アクセルスイッチ15がオン状態であるか否かを判定し、これがオン状態であるときには前記ステップS22に移行し、オフ状態であるときには、ステップS27に移行して、自動停止モードを維持してから処理を終了する。
【0053】
一方、ステップS25の判定結果が、車間距離Lの増加量が所定値ΔL以上であるときには、先行車両が発進したものと判断してステップS28に移行し、アクセルスイッチ15がオン状態であるか否かを判断し、アクセルスイッチ15がオン状態であるときにはステップS29に移行して、現在の制御モードを追従モードFMに変更して処理を終了し、アクセルスイッチ15がオフ状態であるときには、ステップS30に移行して、セットスイッチSWS がオン状態であるか否かを判定し、これがオフ状態であるときには前記ステップS27に移行し、セットスイッチSWS がオン状態であるときには前記ステップS29に移行する。
【0054】
この図5の遷移先選択処理において、ステップS21〜S24の処理で第5条件が成立したか否かを判断し、ステップS25,S28,S28の処理で第3条件が成立したか否かを判断している。
さらに、図3の追従制御処理におけるステップS6の追従モードからの遷移先選択処理は、図6に示すように、先ず、ステップS31で、自動変速機3のレンジがドライブレンジ以外に変更されたか否かを判定し、レンジが変更されたときには、ステップS32に移行して、現在の制御モードを制御解除モードRMに変更してから処理を終了し、ドライブレンジを維持している場合にはステップS33に移行する。
【0055】
このステップS33では、操舵角センサ19で検出した操舵角θが所定値θs以上であるか否かを判定し、θ≧θsであるときにはステップS22に移行し、θ<θsであるときにはステップS34に移行し、制動圧センサ18で検出した制動圧PB (n) を読込み、これが前回値PB (n−1) より増加しているか否かを判定することにより、ブレーキペダル16を踏み増しているか否かを判定し、ブレーキペダル16の踏み増しているときには前記ステップS32に移行し、そうでないときにはステップS35に移行する。
【0056】
このステップS35では、車間距離センサ12で検出した車間距離Lが所定値LL 以下であるか否かを判定し、L≦LL であるときにはステップS36に移行して、自車速Vsが所定値VL 以下であるか否かを判定し、Vs≦VL であるときにはステップS37に移行して、自動停止モードSMをそのまま維持してから処理を終了し、ステップS35の判定結果がL>LL であるとき及びステップS36の判定結果がVs>VL であるときにはステップS38に移行して、現在の制御モードを追従モードFMに変更してから処理を終了する。
【0057】
さらにまた、図3の追従制御処理におけるステップS7の制御解除モードからの遷移先選択処理は、図7に示すように、先ず、ステップS40で、アクセルスイッチ15がオン状態であるか否かを判定し、これがオン状態であるときにはステップS41に移行して、現在の制御モードを制御待機モードWMに変更してから処理を終了し、アクセルスイッチ15がオフ状態であるときにはステップS42に移行する。
【0058】
このステップS42では、自動変速機3のレンジがドライブレンジであるか否かを判定し、ドライブレンジ以外のレンジであるときにはステップS43に移行して、ブレーキスイッチ17がオン状態であるか否かを判定し、これがオン状態であるときには前記ステップS41に移行し、オフ状態であるときにはステップS44に移行して、制御解除モードをそのまま維持してから処理を終了し、ドライブレンジであるときにはステップS45に移行する。
【0059】
このステップS45では、自車両が停止状態であるか否かを判定し、停止状態であるときにはステップS46に移行して、ブレーキスイッチ17がオン状態であるか否かを判定し、これがオフ状態であるときには前記ステップS44に移行し、ブレーキスイッチ17がオン状態であるときにはステップS47に移行して、セットスイッチSWS がオン状態であるか否かを判定し、これがオフ状態であるときには前記ステップS42に移行し、セットスイッチSWS がオン状態であるときにはステップS48に移行して、現在の制御モードを自動停止モードSMに変更してから処理を終了する。
【0060】
一方、前記ステップS45の判定結果が車両が停止中ではなく走行中であるときには、ステップS49に移行して、ブレーキスイッチ17がオン状態であるか否かを判定し、これがオン状態であるときには前記ステップS42に移行し、ブレーキスイッチ17がオフ状態であるときにはステップS50に移行して、セットスイッチSWS がオン状態であるか否かを判定し、これがオフ状態であるときには前記ステップS44に移行し、セットスイッチSWS がオン状態であるときにはステップS51に移行して、現在の制御モードを追従モードFMに変更してから処理を終了する。
【0061】
この図7の処理において、ステップS40,S46,S47,S49の処理で第9条件が成立したか否かを判断し、ステップS44,S45,S46,S47の処理で第6条件が成立したか否かを判断し、ステップS40,S42,S45,S49及びS50の処理で第8条件が成立したか否かを判断する。
なおさらに、図3の追従制御処理におけるステップS9の制御待機モード処理は、図8に示すように、先ず、ステップS61で車輪速センサ13FL及び13FRで検出した検出パルスの単位時間当たりのパルス数又はパルス間の経過時間を計測し、これとタイヤ外径とに基づいて車速VFL及びVFRを算出し、これらの平均値を自車速Vsとして算出し、次いでステップS62に移行して、自動変速機3のレンジを切換えるセレクトレバーの少なくともドライブレンジ位置に設けたドライブレンジ検出スイッチSWD のスイッチ信号を読込み、次いでステップS63に移行して、ブレーキスイッチ17のスイッチ信号を読込み、次いでステップS64に移行してセットスイッチSWS のスイッチ信号を読込んでから処理を終了する。
【0062】
また、図3の追従制御処理におけるステップS11の自動停止モード処理は、図9に示すように、先ず、ステップS71で、車間距離センサ12で検出した車間距離Lを読込み、次いでステップS72に移行して、図8のステップS61と同様に自車速Vsを計測し、次いでステップS73に移行して、ドライブレンジ検出スイッチSWD のスイッチ信号を読込み、次いでステップS74に移行して、ブレーキスイッチ17のスイッチ信号を読込み、次いでステップS75に移行して、操舵角センサ19で検出した操舵角θを読込み、次いでステップS76に移行して、ウインカ信号を読込、次いでステップS77に移行して、制動圧センサ18で検出した制動圧PB を読込み、これを目標制動圧PB * として制動制御装置8に出力する。
【0063】
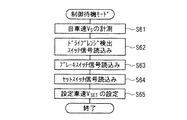
さらに、図3の追従制御処理におけるステップS13の追従モード処理は、図10に示すように、ステップS81で、車間距離センサ12で検出した車間距離Lを読込み、次いでステップS82に移行して、図8のステップS61と同様に自車速Vsを計測し、次いでステップS83に移行して、ドライブレンジ検出スイッチSWD のスイッチ信号を読込み、次いでステップS84に移行して、ブレーキスイッチ17のスイッチ信号を読込み、次いでステップS85に移行して、アクセルスイッチ15のスイッチ信号を読込み、次いでステップS86に移行して、自車速Vsに基づいて下記(1)式の演算を行って目標車間距離L* を算出し、この目標車間距離L* と車間距離Lとの偏差に基づいて目標車速V* を算出し、この目標車速V* に基づいて車速制御処理を行って、制動制御装置8、エンジン出力制御装置9及び変速機制御装置10を制御する。
【0064】
L* =Vs×TCF+TOF …………(1)
ここで、TCFは自車が現在の先行車の後方L0 [m]の位置に到達するまでの時間(車間時間)、TOFはオフセット時間である。
また、車速制御処理は、目標車速V* と運転者が設定した設定車速VSET の何れか小さい方を制御対象車速VC として選択し、例えば特開平10−272963号に開示されているようにモデルマッチング補償器とロバスト補償器とで構成されるロバストモデルマッチング制御手法による車速サーボ系や一般的なフィードバック制御系を適用することにより、自車速Vsを制御対象車速VC に一致させるための駆動力指令値FOR及び外乱推定値dV ′を算出し、これらの偏差でなる目標制・駆動力F* を算出し、この目標制・駆動力F* に従って制動制御装置8、エンジン出力制御装置9及び変速機制御装置10を制御して車速制御を行う。
【0065】
さらにまた、図3の追従制御処理におけるステップS15の制御解除モード処理は、図11に示すように、ステップS91で自車速Vsを算出し、次いでステップS92に移行して、ドライブレンジ検出スイッチSWD を読込み、次いでステップS93に移行して、ブレーキスイッチ17のスイッチ信号を読込み、次いでステップS94に移行して、アクセルスイッチ15のスイッチ信号を読込み、次いでステップS95に移行して、セットスイッチSWS のスイッチ信号を読込み、次いでステップS96に移行して、自動停止モードSM又は追従モードFMで設定した目標制動圧PB * を保持するか、又はこの目標制動圧PB * を所定量ΔPづつ徐々に減少させた目標制動圧PB * を算出し、これらを制動制御装置8に出力する。
【0066】
そして、図3の追従制御処理が追従制御手段に対応し、図8のステップS51の処理、図9のステップS62の処理、図10のステップS72の処理及び図11のステップS81の処理と車輪速センサ13FL及び13FRとが車速検出手段に対応している。
したがって、今、イグニッションスイッチSWIGがオフ状態であり、セレクトレバーがパーキングレンジにあると共に、パーキングブレーキ(図示せず)が作動されて自車両が先行車両と共に停止しているものとすると、この状態では、追従制御用コントローラ30にも電源が投入されておらず、制御停止状態となっている。
【0067】
この状態から乗員が乗車して、イグニッションスイッチSWIGをオン状態とする追従制御用コントローラ30に電源が投入されて制御が開始される。
このとき、メインスイッチSWM はイグニッションスイッチSWIGがオフ状態であるときにリレー回路21が非付勢状態となっいることからオフ状態となっており、追従制御用コントローラ30で制御が開始されたときに、初期化処理によって制御モードが制御待機モードWMに設定されると共に、各スイッチ及びセンサの信号読込みが行われるが、図3の追従制御処理は中止状態となっている。
【0068】
この状態から、メインスイッチSWM の切換スイッチ20を中立位置からオン位置とすると、これに応じてリレー回路21がオン状態となって自己保持状態となり、切換スイッチ20を中立位置に復帰させてもスイッチ信号SM はオン状態を継続する。
このように、メインスイッチSWM がオン状態となると、図3の追従制御処理が実行開始され、制御待機モードWMが初期設定されていることにより、ステップS1からステップS2に移行し、図4の制御待機モードからの遷移先選択処理が実行されるが、セレクトレバーでパーキングレンジが選択されているので、ステップS11からステップS12に移行して、制御待機モードを維持する。
【0069】
このため、図3のステップS8からステップS9に移行して、図8の制御待機モード処理が実行され、自車速Vs(=0)が演算されると共に、ドライブレンジ検出スイッチ信号SDR、ブレーキスイッチ信号SB 及びセットスイッチ信号SSET が読込まれる。
この状態から運転者がブレーキペダル17を踏込んだ状態で、セレクトレバーでドライブレンジを選択すると、図4の遷移先選択処理で、ステップS11からステップS13及びS14を経てステップS15に移行するがセットスイッチSWS がオフ状態であるので、ステップS12に移行し、制御待機モードを継続する。
【0070】
この状態で、運転者が追従制御を開始させるためにセットスイッチSWS をオン状態とすると、ステップS15からステップS16に移行し、制御モードが制御待機モードWMから自動停止モードSMに変更される。この自動停止モードSMでは、図9の自動停止モード処理が実行されることにより、車間距離Lの読込み、自車速Vsの計測や各種信号の読込みが行われると共に、ステップS78で、制動圧センサ18で検出した制動圧PB を目標制動圧PB * として設定し、これを制動制御装置8に出力する。
【0071】
このため、運転者がパーキングブレーキを解放すると共に、ブレーキペダル16を解放して発進可能状態として、図5の自動停止モードでの遷移先選択処理で、ステップS21〜ステップS25を経てステップS26に移行し、アクセルスイッチ15がオフ状態であるので、ステップS27に移行して自動停止モードを維持する。
【0072】
このとき、ブレーキペダル16を解放する際に、急な下り坂等で自車両が発進することになり、ブレーキペダル16を踏み増した場合には、図5の処理におけるステップS4からステップS22に移行して、制御解除モードRMに変更されるが、この制御解除モードRMでアクセルスイッチ15がオフ状態、ドライブレンジ検出スイッチSWD がオン状態で且つ車両が停止しており、ブレーキスイッチ17がオン状態であるので、ステップS40、S42、S45、S46を経てステップS47に移行し、再度セットスイッチSWS をオン状態とすることにより、自動停止モードに復帰する。
【0073】
そして、自動停止モードにある状態で、先行車両が発進して、車間距離Lの変化量が所定値ΔL以上となると、図5の処理におけるステップS25からステップS28に移行し、運転者がアクセルペダル14を踏込むか又はセットスイッチSWS をオン状態とすることにより、運転者の意志によって追従モードに遷移する。
【0074】
この追従モードでは、車間距離センサ12で先行車両を捕捉しているので、車間距離Lが目標車間距離L* に一致するように目標加減速度が演算され、これに応じた目標制・駆動力F* が正の値となって、スロットル開度指令値THがエンジン出力制御装置9に出力されることにより、自車両が発進されて加速状態となる。
【0075】
この追従モードで、先行車両が減速するか、他車線から先行車車両が割り込むことにより、車間距離Lが目標車間距離L* より狭まると、目標制・駆動力F* が負の値となって、スロットル開度指令値THが全閉状態を表す“0”となると共に、必要に応じて変速機制御装置10に例えばシフトダウンを指令するシフト位置信号TSが出力されてエンジンブレーキ力が増加されると共に、制動制御装置8に目標制・駆動力F* の値に応じた目標制動圧PB * が出力されて、制動状態となり、車間距離Lを目標車間距離L* に一致させ、車間距離Lが目標車間距離L* の近傍となると、変速機制御装置10にシフトアップを指令するシフト位置信号TSが出力されると共に、目標制動圧PB * も減少し、車間距離Lが目標車間距離L* に一致して、目標制・駆動力F* が正の値となると、これに応じてスロットル開度指令値THがエンジン出力制御装置9に出力されて、駆動力制御状態に復帰する。
【0076】
この車間距離制御状態で、先行車両が他車線に車線変更するか、又は自車両が追い越し車線に車線変更することにより、車間距離センサ12で先行車両を捕捉できない状態となると、運転者が設定した設定車速VSET に自車速Vsが一致するように車速制御される。
この追従モードで、赤信号等で先行車両が減速して停止した場合には、自車両も目標車間距離L* を保つように目標制動圧PB * が出力されることにより、減速制御されて停車するが、このときの目標車間距離L* は自車速Vsの減少に応じて減少するので、この車間距離センサ12で検出した車間距離Lが所定値LL 以下となり、且つ自車速Vsが設定車速VL 以下となると、図4の遷移先選択処理において、ステップS31,S33〜S36を経てステップS37に移行して、自動停止モードSMに変更され、このときの制動圧PB が保持される。
【0077】
その後、青信号となって先行車両が発進すると前述したように、運転者がアクセルペダル14を踏込むことにより、アクセルスイッチ15がオン状態となるか、運転者がセットスイッチSWS を再度オン状態とすることにより、運転者の意志によって追従モードFMに復帰する。
また、追従モードFMで、長い下り坂となって、運転者がエンジンブレーキを効かすためにセレクトレバーで2速レンジを選択すると、ドライブレンジ検出スイッチSWD のスイッチ信号SD がオフ状態となるので、図6の処理において、ステップS31からステップS32に移行して制御解除モードとなり、その直前の追従モードFMで目標制動圧PB * が出力されているときには、その目標制動圧PB * が保持されるか又は徐々に減圧される。
【0078】
この2速レンジで走行している状態での制御解除モードで、ブレーキペダル16が踏込まれて、ブレーキスイッチ17がオン状態となると、ステップS43からステップS41に移行して、制御待機モードWMに復帰する。
さらに、追従モードFMで、アクセルペダル14を踏込んでアクセルスイッチ15がオン状態となるか、ブレーキペダル16を踏み増したときにも制御解除モードRMに遷移する。
【0079】
そして、この制御解除モードRMでは、アクセルペダル14を踏込んでアクセルスイッチ15がオン状態であるときには、制御待機モードWMに復帰し、アクセルスイッチ15がオフ状態であるときには、セレクトレバーでドライブレンジが選択されて走行しているときに、ブレーキペダル16を踏込んでブレーキスイッチ17がオン状態となったとき及び車両が停止して、セットスイッチSWS がオフ状態であるときに制御待機モードに遷移するが、ドライブレンジで走行中にブレーキスイッチ17がオフ状態で、且つセットスイッチSWS がオフ状態であるときには制御解除モードRMを維持し、ドライブレンジで走行中にセットスイッチSWS がオン状態となったときに追従モードFMに遷移し、さらにドライブレンジで停止してセットスイッチSWS がオン状態となったときに自動停止モードSMに遷移する。
【0080】
さらに、制御待機モードWMで、車両を走行させてからセットスイッチSWS をオン状態とすることにより、従来例と同様に追従モードに移行し、メインスイッチSWM がオフ状態となるか、又はイグニッションスイッチSWIGがオフ状態となると、図3の追従制御処理を終了して、制御中止状態となる。
このように、上記第1の実施形態によると、メインスイッチSWM をオン状態とすることにより、制御待機モードとなり、この状態で、ドライブレンジが選択されている状態で、セットスイッチSWS をオン状態とすることにより、運転者の意志によって自動停止モード又は追従モードに遷移させることができ、任意のタイミングで追従制御を開始することができる。
【0081】
しかも、自動停止モード及び制御解除モードでは、その前のモードで制動圧が発生されているときに、この制動圧を保持するようにしているので、急な制動圧変化によって運転者に違和感を与えることを確実に防止することができる。
なお、上記第1の実施形態においては、図4の制御待機モードからの遷移先選択処理において、自動停止モードに遷移するための第1条件にセットスイッチSWS をオン状態とすることを付加した場合について説明したが、これに限定されるものではなく、図12に示すように、ステップS15の処理を省略して、ステップS14でブレーキスイッチ17がオン状態であるときに直接ステップS16に移行して自動停止モードに遷移するようにしてもよい。
【0082】
同様に、第2条件〜第8条件についてもセットスイッチSWS がオン状態であることを条件として付加して運転者の意志による遷移を行うようにしているが、これらについてもセットスイッチSWS の判断を条件から外すようにしてもよい。
また、上記第1の実施形態においては、キャンセルスイッチSWC については説明していないが、自動停止モード及び追従モードでキャンセルスイッチSWC をオン状態とすることにより、制御解除モードに遷移するようにしてもよい。
【0083】
さらに、上記第1の実施形態においては、車速センサとして、車輪速センサ13FL及び13FRを適用した場合について説明したが、これに限定されるものではなく、自動変速機3の出力軸の回転数を検出するようにしてもよく、さらにはアンチロックブレーキ装置を搭載している場合には、車輪速度から車体速度を推定する車体速度推定手段の車体速度を利用するようにしてもよい。
【0084】
さらにまた、上記第1の実施形態においては、目標車間距離L* を自車速Vsをもとに算出する場合について説明したが、これに限定されるものではなく、車間距離Lをバンドパスフィルタ処理又はハイパスフィルタ処理によって微分して相対速度ΔVを算出し、自車速Vsに相対速度ΔVを加算して先行車速度Vtを算出し、この先行車速度Vtをもとに算出するようにしてもよい。
【0085】
なおさらに、上記第1の実施形態においては、車間距離検出手段として、レーザレーダを適用した場合について説明したが、これに限定されるものではなく、ミリ波レーダを使用したり、ステレオカメラで撮像した画像を画像処理することにより車間距離を演算するようにしてもよい。
次に、本発明の第2の実施形態を図13〜図15について説明する。
【0086】
この第2の実施形態は、上述した第1の実施形態において、運転者が設定車速VSET の設定・変更を所定制御モードで行うことができるようにしたものである。
この第2の実施形態においては、制御待機モード処理で、図13に示すように、第1の実施形態における図8の処理において、ステップS64の後に設定車速VSET の設定・変更を行うステップS65が追加され、同様に自動停止モード処理で、図14に示すように、第1の実施形態における図9の処理において、ステップS77とステップS78との間に設定車速VSET の設定・変更を行うステップS79が介挿され、さらに追従モード処理で、図15に示すように、第1の実施形態における図10の処理において、ステップS85とステップS86との間に設定車速VSET の設定・変更を行うステップS87が介挿されていることを除いては、第1の実施形態と同様の処理を行う。
【0087】
ここで、ステップS65及びS87の設定車速VSET の設定・変更処理は、自車両が走行しているときに、レジュームスイッチ等の設定スイッチをオン状態とすることにより、そのときの自車速Vsを設定車速VSET として設定することができる外、設定されている設定車速VSET を設定スイッチをオン状態としてカウントアップ又はカウントダウンさせることにより、設定するようにしてもよく、車両が停車している場合には設定スイッチをオン状態としてカウントアップ又はカウントダウンによって設定値を変更するようにしてもよく、さらにはテンキーを使用して設定車速VSET を入力するようにしてもよい。ステップS79の設定車速VSET の設定・変更処理も設定スイッチをオン状態としてカウントアップ又はカウントダウンによって設定値を変更したり、テンキーを使用して設定車速VSET を入力するようにしてもよい。
【0088】
この第2の実施形態によると、設定車速VSET の設定を制御待機モード、自動停止モード及び追従モードの3つのモードで行うことができ、特に、制御待機モードや自動停止モードでは運転者がステアリングホイールの操作をしていない停車時に設定車速VSET の設定・変更を行うことができ、誤操作や運転操作に影響を与えることなく設定・変更を行うことができる。
【0089】
なお、上記各実施形態においては、追従モードで目標車間距離L* と実車間距離Lとの偏差に基づいて目標車速V* を算出し、この目標車速V* に自車速Vsが一致するように速度制御する場合について説明したが、これに限定されるものではなく、目標車間距離L* と実車間距離Lとの偏差に基づいて目標加減速度を算出し、この目標加減速度に基づいて制動制御装置8、エンジン出力制御装置9及び変速機制御装置10を制御するようにしてもよい。
【0090】
また、上記各実施形態においては、ディスクブレーキ7を適用して、その制動圧を制御するようにした場合について説明したが、これに限定されるものではなく、電気自動車のように回生制動を行う場合には、その回生制動力を制御するようにしてもよく、ブレーキアクチュエータとして電動モータ等を使用する場合に電気的制御を行うこともでき、要は制動装置で発生する制動力を制御できればよいものである。
【0091】
さらに、上記各実施形態においては、エンジン2の出力側に自動変速機3を設けた場合について説明したが、これに限定されるものではなく、無段変速機を適用することもできる。
さらにまた、上記各実施形態においては、後輪駆動車に本発明を適用した場合について説明したが、前輪駆動車や四輪駆動車にも本発明を適用することができ、さらにはエンジン2に代え電動モータを適用した電気自動車や、エンジン2及び電動モータを併用するハイブリッド車両にも本発明を適用し得るものである。この場合にはエンジン出力制御装置に代えて電動モータ制御装置を適用すればよいものである。
【図面の簡単な説明】
【図1】本発明の第1の実施形態を示す概略構成図である。
【図2】追従制御用コントローラの遷移状態を示す説明図である。
【図3】追従制御用コントローラの追従制御処理手順の一例を示すフローチャートである。
【図4】図3の制御待機モードからの遷移先選択処理を示すフローチャートである。
【図5】図3の自動停止モードからの遷移先選択処理を示すフローチャートである。
【図6】図3の追従モードからの遷移先選択処理を示すフローチャートである。
【図7】図3の制御解除モードからの遷移先選択処理を示すフローチャートである。
【図8】図3の制御待機モード処理を示すフローチャートである。
【図9】図3の自動停止モード処理を示すフローチャートである。
【図10】図3の追従モード処理を示すフローチャートである。
【図11】図3の制御解除モード処理を示すフローチャートである。
【図12】第1の実施形態における制御待機モードからの遷移先選択処理の他の例を示すフローチャートである。
【図13】本発明の第2の実施形態における制御待機モード処理を示すフローチャートである。
【図14】第2の実施形態における自動停止モード処理を示すフローチャートである。
【図15】第2の実施形態における追従モード処理を示すフローチャートである。
【符号の説明】
1FL,1FR 前輪
1RL,1RR 後輪
2 エンジン
3 自動変速機
7 ディスクブレーキ
8 制動制御装置
9 エンジン出力制御装置
10 変速機制御装置
12 車間距離センサ
13L,13R 車輪速センサ
15 アクセルスイッチ
17 ブレーキスイッチ
18 制動圧センサ
19 操舵角センサ
SWM メインスイッチ
SWS セットスイッチ
SWC キャンセルスイッチ
SWD ドライブレンジ検出スイッチ
30 追従制御用コントローラ
Claims (9)
- 自車両の車速を検出する車速検出手段と、先行車両との車間距離を検出する車間距離検出手段と、該車間距離検出手段で検出した車間距離を目標車間距離に一致させる車間制御及び前記車速検出手段で検出した自車速を設定車速に一致させる車速制御の何れかを行う追従制御手段とを備えた車両用追従制御装置において、追従制御の開始を指示する開始指示手段を備え、前記追従制御手段は、制御待機モード、自動停止モード、追従モード及び制御解除モードの4つの制御モードを有し、前記開始指示手段からの開始指示により前記制御待機モードとなり、該制御待機モードから自動停止モードへの遷移は、自動変速機がドライブレンジにあり、且つ停車中であることを条件として行われ、前記制御待機モードから追従モードへの遷移は、自動変速機がドライブレンジであり、且つ運転者が制動装置を非作動状態としたことを条件として行われ、前記自動停止モードから追従モードへの遷移は、先行車両が自動停止モードに移行したときの位置から所定量前方に移動したことを条件として行われ、前記追従モードから自動停止モードへの遷移は、先行車両との車間距離が所定値以下であり、且つ車速が所定値以下であることを条件として行われ、前記自動停止モードから制御解除モードへの遷移は、運転者の操舵量が所定値以上となったとき及びレンジ変更を行ったときの何れかを条件として行われ、前記制御解除モードから自動停止モードへの遷移は、自車両が停止し、且つ自動変速機がドライブレンジであることを条件として行われ、前記追従モードから制御解除モードへの遷移は、運転者による加減速操作及びレンジ変更の何れかが行われることを条件として行われ、前記制御解除モードから追従モードへの遷移は、自車両が走行しており、且つ自動変速機がドライブレンジであることを条件として行われ、前記制御解除モードから制御待機モードへの遷移は、運転者が駆動力及び制動力の少なくとも一方を操作したことを条件として行われることを特徴とする車両用追従制御装置。
- 前記自動停止モードは、制動装置で所定の制動力を発生させて停止状態を保持するように設定され、前記追従モードは、目標車速の設定・変更を行うと共に、先行車両との車間距離に基づく目標車速及び運転者が設定した設定車速の少なくとも一方に応じて駆動力及び制動力の少なくとも一方を制御するように設定され、前記制御解除モードは、前記追従モードで発生させている制動力を保持し、且つ駆動力制御を停止させるように設定されていることを特徴とする請求項1記載の車両用追従制御装置。
- 前記自動停止モードは、設定車速の設定・変更が可能に設定されていることを特徴とする請求項1又は2に記載の車両用追従制御装置。
- 前記制御待機モードは、設定車速の設定・変更が可能に設定されていることを特徴とする請求項1乃至3の何れかに記載の車両用追従制御装置。
- 前記制御待機モードから自動停止モードへの遷移は、自車両が停止状態で且つ運転者が制動力を発生させているときを条件として行われることを特徴とする請求項1乃至4の何れかに記載の車両用追従制御装置。
- 前記制御解除モードから制御待機モードへの遷移は、運転者により制動力を増加させる操作を行ったことを条件として行われることを特徴とする請求項1乃至5の何れかに記載の車両用追従制御装置。
- 前記制御解除モードは、追従モードでの制動力を徐々に減少させるように設定され、当該制御解除モードから制御待機モードへの遷移は、制動力が所定値以下となったことを条件として行われることを特徴とする請求項1乃至6の何れかに記載の車両用追従制御装置。
- 前記制御解除モードは、先行車両との車間距離、先行車両の有無及び自車速の少なくとも1つに応じて、制動力を徐々に減少させる減少制御及び制動力を保持する保持制御の何れかを行うように設定され、当該制御解除モードから制御待機モードへの遷移は、制動力が所定値以下となること及び運転者が制動力又は駆動力を操作したことの何れかを条件として行われることを特徴とする請求項1乃至6の何れかに記載の車両用追従制御装置。
- 前記制御待機モードから追従モードへの遷移は、自動変速機がドライブレンジで運転者が制動力を操作していない状態で、先行車両との車間距離、自車速及び先行車両の速度又は先行車両との相対速度の関係により成立する条件を満足するときに行われることを特徴とする請求項1乃至8の何れかに記載の車両用追従制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP18649799A JP3627575B2 (ja) | 1999-06-30 | 1999-06-30 | 車両用追従制御装置 |
| DE60030357T DE60030357T2 (de) | 1999-06-30 | 2000-06-30 | Abstandsbezogenes Fahrgeschwindigkeitsregelsystem mit Soll-Abtriebsdrehmomentsteuerung |
| US09/609,242 US6330508B1 (en) | 1999-06-30 | 2000-06-30 | Preceding vehicle following control system |
| EP00305547A EP1065090B1 (en) | 1999-06-30 | 2000-06-30 | Preceding vehicle following control system with target drive torque |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP18649799A JP3627575B2 (ja) | 1999-06-30 | 1999-06-30 | 車両用追従制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2001010371A JP2001010371A (ja) | 2001-01-16 |
| JP3627575B2 true JP3627575B2 (ja) | 2005-03-09 |
Family
ID=16189533
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP18649799A Expired - Fee Related JP3627575B2 (ja) | 1999-06-30 | 1999-06-30 | 車両用追従制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US6330508B1 (ja) |
| EP (1) | EP1065090B1 (ja) |
| JP (1) | JP3627575B2 (ja) |
| DE (1) | DE60030357T2 (ja) |
Families Citing this family (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19958520A1 (de) | 1999-12-04 | 2001-06-07 | Bosch Gmbh Robert | Geschwindigkeitsregler für ein Kraftfahrzeug |
| JP3912992B2 (ja) * | 2001-03-16 | 2007-05-09 | ダイハツ工業株式会社 | 追従走行装置及びその制御方法 |
| JP4066609B2 (ja) * | 2001-03-19 | 2008-03-26 | 日産自動車株式会社 | 車両用走行制御装置の状態表示装置 |
| DE10151717A1 (de) * | 2001-10-19 | 2003-04-30 | Bayerische Motoren Werke Ag | Geschwindigkeitsregel-System mit Abstandssensorik für ein Kraftfahrzeug |
| JP2003260957A (ja) | 2002-03-11 | 2003-09-16 | Hitachi Ltd | 車間制御システム |
| DE60328255D1 (de) * | 2003-01-09 | 2009-08-20 | Ford Global Tech Llc | Abstandsbezogenes Fahrgeschwindigkeitsregelsystem |
| GB0300975D0 (en) * | 2003-01-16 | 2003-02-19 | Ford Global Tech Inc | Adaptive cruise control systems |
| DE10303611A1 (de) * | 2003-01-30 | 2004-08-12 | Robert Bosch Gmbh | Geschwindigkeitsregler mit mehreren Betriebsmodi |
| US7482916B2 (en) * | 2004-03-15 | 2009-01-27 | Anita Au | Automatic signaling systems for vehicles |
| JP2006290328A (ja) | 2005-03-16 | 2006-10-26 | Nissan Motor Co Ltd | 先行車追従制御装置 |
| JP2006309650A (ja) * | 2005-05-02 | 2006-11-09 | Calsonic Kansei Corp | ナンバー認識装置及方法 |
| JP4674491B2 (ja) * | 2005-05-20 | 2011-04-20 | 日産自動車株式会社 | 先行車追従制御装置 |
| JP2006348830A (ja) * | 2005-06-15 | 2006-12-28 | Toyota Motor Corp | 走行制御装置 |
| JP4086201B2 (ja) * | 2005-07-15 | 2008-05-14 | 三菱電機株式会社 | 車両用走行制御装置 |
| US7937075B2 (en) | 2006-10-06 | 2011-05-03 | At&T Intellectual Property I, L.P. | Mode changing of a mobile communications device and vehicle settings when the mobile communications device is in proximity to a vehicle |
| EP2052935B1 (en) * | 2007-10-23 | 2012-01-11 | Nissan Motor Co., Ltd. | Headway distance maintenance supporting system and method |
| GB2455584A (en) * | 2007-12-15 | 2009-06-17 | Anatolijs Fjodorovics | Distance based traffic control system for a vehicle |
| JP5237181B2 (ja) * | 2009-04-22 | 2013-07-17 | 本田技研工業株式会社 | 車両用走行制御装置 |
| JP4959758B2 (ja) * | 2009-08-11 | 2012-06-27 | 本田技研工業株式会社 | 走行制御装置 |
| IT1396698B1 (it) * | 2009-11-11 | 2012-12-14 | Nilfisk Advance Spa | Veicolo perfezionato per il trattamento e la pulizia di pavimenti e suoli |
| US8825345B2 (en) | 2010-07-16 | 2014-09-02 | Honda Motor Co., Ltd. | Engine control for a motor vehicle |
| JP5716844B2 (ja) * | 2011-12-22 | 2015-05-13 | トヨタ自動車株式会社 | アイドリングストップ制御装置、車両、および、車両制御方法 |
| JP2014000882A (ja) * | 2012-06-18 | 2014-01-09 | Toyota Motor Corp | 車両用走行制御装置 |
| GB2508668A (en) * | 2012-12-10 | 2014-06-11 | Jaguar Land Rover Ltd | Adaptive cruise control (ACC) means for a host vehicle having regenerative and non-regenerative braking means |
| JP5867433B2 (ja) | 2013-03-25 | 2016-02-24 | トヨタ自動車株式会社 | 車両の制御装置 |
| US9150224B2 (en) * | 2013-09-24 | 2015-10-06 | Ford Global Technologies, Llc | Transitioning from autonomous vehicle control to to driver control to responding to driver control |
| JP5999074B2 (ja) * | 2013-11-25 | 2016-09-28 | トヨタ自動車株式会社 | 車両用制御装置、エンジン制御方法 |
| GB2523203B (en) * | 2014-02-18 | 2017-01-11 | Jaguar Land Rover Ltd | Control System and method |
| KR102383331B1 (ko) * | 2016-11-22 | 2022-04-05 | 현대자동차주식회사 | 자동차의 avh 해제 방법 |
| DE102016014380A1 (de) * | 2016-12-02 | 2018-06-07 | Lucas Automotive Gmbh | Überwachung eines Anfahrvorgangs mit Geschwindigkeitsregelsystem |
| FR3066984A1 (fr) * | 2017-06-06 | 2018-12-07 | Peugeot Citroen Automobiles Sa | Dispositif d’assistance a la conduite d’un vehicule par controle du freinage dans les phases d’arret |
| JP6819483B2 (ja) * | 2017-06-26 | 2021-01-27 | トヨタ自動車株式会社 | 車両の制御装置 |
| US10757485B2 (en) | 2017-08-25 | 2020-08-25 | Honda Motor Co., Ltd. | System and method for synchronized vehicle sensor data acquisition processing using vehicular communication |
| JP6978377B2 (ja) * | 2018-05-10 | 2021-12-08 | 本田技研工業株式会社 | 車両制御装置、及び車両制御装置を備える車両 |
| US11181929B2 (en) | 2018-07-31 | 2021-11-23 | Honda Motor Co., Ltd. | System and method for shared autonomy through cooperative sensing |
| US11163317B2 (en) | 2018-07-31 | 2021-11-02 | Honda Motor Co., Ltd. | System and method for shared autonomy through cooperative sensing |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR940001633B1 (ko) * | 1990-01-17 | 1994-02-28 | 미쯔비시 덴끼 가부시끼가이샤 | 주행 제어장치 |
| JP2987778B2 (ja) * | 1990-11-30 | 1999-12-06 | アイシン精機株式会社 | 車両速度制御装置 |
| JPH0747862A (ja) | 1993-08-05 | 1995-02-21 | Mitsubishi Motors Corp | 自動車の走行制御装置 |
| US5805103A (en) * | 1995-09-27 | 1998-09-08 | Mazda Motor Corporation | Method of and system for monitoring preceding vehicles |
| US5959572A (en) | 1997-03-31 | 1999-09-28 | Nissan Motor Co., Ltd. | Vehicle follow-up control apparatus |
| JP3736017B2 (ja) | 1997-03-31 | 2006-01-18 | 日産自動車株式会社 | 先行車追従制御装置 |
| US6223117B1 (en) * | 1997-05-27 | 2001-04-24 | General Motors Corporation | Cut-in management for an adaptive cruise control system |
| JPH11186497A (ja) | 1997-12-17 | 1999-07-09 | Toshiba Corp | 半導体集積回路装置 |
| JP2001010373A (ja) * | 1999-07-01 | 2001-01-16 | Hitachi Ltd | 自動車の走行制御装置 |
-
1999
- 1999-06-30 JP JP18649799A patent/JP3627575B2/ja not_active Expired - Fee Related
-
2000
- 2000-06-30 DE DE60030357T patent/DE60030357T2/de not_active Expired - Lifetime
- 2000-06-30 US US09/609,242 patent/US6330508B1/en not_active Expired - Lifetime
- 2000-06-30 EP EP00305547A patent/EP1065090B1/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| EP1065090B1 (en) | 2006-08-30 |
| JP2001010371A (ja) | 2001-01-16 |
| EP1065090A2 (en) | 2001-01-03 |
| DE60030357T2 (de) | 2007-08-30 |
| DE60030357D1 (de) | 2006-10-12 |
| EP1065090A3 (en) | 2002-02-06 |
| US6330508B1 (en) | 2001-12-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3627575B2 (ja) | 車両用追従制御装置 | |
| JP3675235B2 (ja) | 車両用走行制御装置 | |
| US6658344B2 (en) | Vehicle traveling control system with state display apparatus | |
| JP3627582B2 (ja) | 車両用追従制御装置 | |
| JP3838048B2 (ja) | 車両用走行制御装置 | |
| JP3608433B2 (ja) | 先行車追従制御装置 | |
| JP3551756B2 (ja) | 車両用走行制御装置 | |
| JP3675240B2 (ja) | 車両用追従制御装置 | |
| JPH10181382A (ja) | 車間距離制御装置 | |
| JPH08223708A (ja) | 電気自動車の定速走行制御装置 | |
| JP2005028968A (ja) | 車両用走行装置 | |
| JPH09290665A (ja) | 車両の自動速度制御装置 | |
| JP3797115B2 (ja) | 車速制御装置 | |
| JP2005138748A (ja) | 車両用走行制御装置 | |
| JP2005001567A (ja) | 車両用走行装置 | |
| JP2000296724A (ja) | 車間制御装置 | |
| JP3885347B2 (ja) | 車両用走行制御装置 | |
| JP3870674B2 (ja) | 車両用追従走行制御装置 | |
| JP2004216964A (ja) | 車間距離制御装置 | |
| JP2000313245A (ja) | 車両用走行制御装置 | |
| JP2000203307A (ja) | 車両用走行制御装置 | |
| JP3649105B2 (ja) | 車両用走行制御装置 | |
| JP2004216965A (ja) | 車間距離制御装置 | |
| JP2002087109A (ja) | 車両用追従走行制御装置 | |
| JP7485463B2 (ja) | 運転支援装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20041116 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20041129 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20071217 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20081217 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091217 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101217 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111217 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121217 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121217 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131217 Year of fee payment: 9 |
|
| LAPS | Cancellation because of no payment of annual fees |