JP2017108112A - 水平スロットの実装および/または移動シャワーヘッドを含む、ウエハー搬送マイクロクライメイト技法および装置 - Google Patents
水平スロットの実装および/または移動シャワーヘッドを含む、ウエハー搬送マイクロクライメイト技法および装置 Download PDFInfo
- Publication number
- JP2017108112A JP2017108112A JP2016198583A JP2016198583A JP2017108112A JP 2017108112 A JP2017108112 A JP 2017108112A JP 2016198583 A JP2016198583 A JP 2016198583A JP 2016198583 A JP2016198583 A JP 2016198583A JP 2017108112 A JP2017108112 A JP 2017108112A
- Authority
- JP
- Japan
- Prior art keywords
- wafer
- processing chamber
- buffer gas
- cassette
- vertical
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title abstract description 38
- 239000000872 buffer Substances 0.000 claims abstract description 688
- 238000012545 processing Methods 0.000 claims abstract description 434
- 239000004065 semiconductor Substances 0.000 claims abstract description 304
- 238000003860 storage Methods 0.000 claims abstract description 60
- 235000012431 wafers Nutrition 0.000 claims description 1323
- 239000007789 gas Substances 0.000 claims description 757
- 239000012636 effector Substances 0.000 claims description 273
- 230000007246 mechanism Effects 0.000 claims description 97
- 238000009826 distribution Methods 0.000 claims description 76
- 238000012546 transfer Methods 0.000 claims description 25
- 230000006870 function Effects 0.000 claims description 23
- IJGRMHOSHXDMSA-UHFFFAOYSA-N Atomic nitrogen Chemical compound N#N IJGRMHOSHXDMSA-UHFFFAOYSA-N 0.000 claims description 16
- 230000004044 response Effects 0.000 claims description 12
- 238000000926 separation method Methods 0.000 claims description 12
- 238000013519 translation Methods 0.000 claims description 10
- 238000004519 manufacturing process Methods 0.000 claims description 9
- 230000004888 barrier function Effects 0.000 claims description 6
- 238000005192 partition Methods 0.000 claims description 5
- 230000007704 transition Effects 0.000 claims description 4
- 238000003491 array Methods 0.000 claims description 2
- 229910001873 dinitrogen Inorganic materials 0.000 claims description 2
- 238000005304 joining Methods 0.000 claims description 2
- 230000000670 limiting effect Effects 0.000 abstract description 3
- 239000003570 air Substances 0.000 description 77
- 230000008569 process Effects 0.000 description 24
- 230000002829 reductive effect Effects 0.000 description 16
- 238000004140 cleaning Methods 0.000 description 11
- 238000010926 purge Methods 0.000 description 9
- 238000013459 approach Methods 0.000 description 8
- 238000011109 contamination Methods 0.000 description 8
- 229910052757 nitrogen Inorganic materials 0.000 description 8
- 230000000694 effects Effects 0.000 description 7
- 239000012080 ambient air Substances 0.000 description 6
- 230000009977 dual effect Effects 0.000 description 6
- 238000003780 insertion Methods 0.000 description 6
- 230000037431 insertion Effects 0.000 description 6
- 239000010410 layer Substances 0.000 description 6
- 230000036961 partial effect Effects 0.000 description 5
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 3
- 229910052782 aluminium Inorganic materials 0.000 description 3
- 230000000295 complement effect Effects 0.000 description 3
- 238000005520 cutting process Methods 0.000 description 3
- 238000013461 design Methods 0.000 description 3
- 230000002452 interceptive effect Effects 0.000 description 3
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 2
- 239000000356 contaminant Substances 0.000 description 2
- 239000011261 inert gas Substances 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 239000001301 oxygen Substances 0.000 description 2
- 229910052760 oxygen Inorganic materials 0.000 description 2
- 239000002245 particle Substances 0.000 description 2
- 239000013618 particulate matter Substances 0.000 description 2
- 230000002195 synergetic effect Effects 0.000 description 2
- 239000011885 synergistic combination Substances 0.000 description 2
- 101100490654 Arabidopsis thaliana AGL80 gene Proteins 0.000 description 1
- 206010003497 Asphyxia Diseases 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 238000009833 condensation Methods 0.000 description 1
- 230000005494 condensation Effects 0.000 description 1
- 238000010790 dilution Methods 0.000 description 1
- 239000012895 dilution Substances 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 238000010348 incorporation Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000000116 mitigating effect Effects 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000003647 oxidation Effects 0.000 description 1
- 238000007254 oxidation reaction Methods 0.000 description 1
- 230000000135 prohibitive effect Effects 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 239000011241 protective layer Substances 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 239000000243 solution Substances 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 230000003319 supportive effect Effects 0.000 description 1
- 210000003857 wrist joint Anatomy 0.000 description 1
Images

















































Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/673—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere using specially adapted carriers or holders; Fixing the workpieces on such carriers or holders
- H01L21/6735—Closed carriers
- H01L21/67389—Closed carriers characterised by atmosphere control
- H01L21/67393—Closed carriers characterised by atmosphere control characterised by the presence of atmosphere modifying elements inside or attached to the closed carrierl
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68707—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a robot blade, or gripped by a gripper for conveyance
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
- H01L21/02104—Forming layers
- H01L21/02107—Forming insulating materials on a substrate
- H01L21/02296—Forming insulating materials on a substrate characterised by the treatment performed before or after the formation of the layer
- H01L21/02299—Forming insulating materials on a substrate characterised by the treatment performed before or after the formation of the layer pre-treatment
- H01L21/02312—Forming insulating materials on a substrate characterised by the treatment performed before or after the formation of the layer pre-treatment treatment by exposure to a gas or vapour
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67017—Apparatus for fluid treatment
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67126—Apparatus for sealing, encapsulating, glassing, decapsulating or the like
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67155—Apparatus for manufacturing or treating in a plurality of work-stations
- H01L21/67161—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the layout of the process chambers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67155—Apparatus for manufacturing or treating in a plurality of work-stations
- H01L21/67161—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the layout of the process chambers
- H01L21/67178—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the layout of the process chambers vertical arrangement
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67155—Apparatus for manufacturing or treating in a plurality of work-stations
- H01L21/6719—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the construction of the processing chambers, e.g. modular processing chambers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67155—Apparatus for manufacturing or treating in a plurality of work-stations
- H01L21/67201—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the construction of the load-lock chamber
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/673—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere using specially adapted carriers or holders; Fixing the workpieces on such carriers or holders
- H01L21/67346—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere using specially adapted carriers or holders; Fixing the workpieces on such carriers or holders characterized by being specially adapted for supporting a single substrate or by comprising a stack of such individual supports
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/673—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere using specially adapted carriers or holders; Fixing the workpieces on such carriers or holders
- H01L21/6735—Closed carriers
- H01L21/67389—Closed carriers characterised by atmosphere control
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
- H01L21/67715—Changing the direction of the conveying path
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
- H01L21/67736—Loading to or unloading from a conveyor
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67742—Mechanical parts of transfer devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67766—Mechanical parts of transfer devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67772—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading involving removal of lid, door, cover
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67778—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading involving loading and unloading of wafers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67778—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading involving loading and unloading of wafers
- H01L21/67781—Batch transfer of wafers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67784—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations using air tracks
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Robotics (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Manipulator (AREA)
Abstract
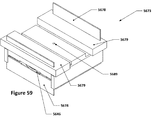
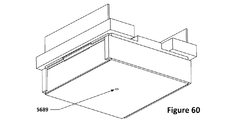
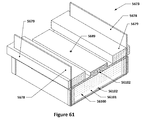
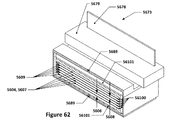
【解決手段】半導体処理チャンバー5674の外部の環境において半導体ウエハーの周りにバッファー・ガス・マイクロクライメイトを形成するためのシステムは、マルチ・ウエハー・ストレージ・システムからのバッファー・ガスの流出を制限しながら、単一のウエハーがマルチ・ウエハー・スタック5673から除去されることを可能にするスロット・ドアと、ロボット・アーム5602の移動の少なくともいくつかに関して、ウエハーを搬送するために使用されるそのようなロボット・アームと縦に並んで移動するバッファー・ガス・ディストリビューターとを含む。
【選択図】図58
Description
先に説明されているように、EFEMは、ウエハー汚染に対してとりわけ厄介な環境を示す。このリスクを緩和するためのいくつかの方策が、下記に説明されている。
上記の技法およびシステムは、EFEMにおけるバッファー・ガス環境の生産およびメンテナンスを促進させるが、本発明者らのうちの何人かまたはすべては、また、半導体ウエハーがEFEMの内部空間を通過するときに、半導体ウエハーの直ぐ近くで極めて大幅に局所化されたバッファー・ガス・マイクロクライメイトを発生させるために使用され得る代替的なまたは補足的な技法も考え出した。そのような技法は、先に説明されているような、バッファー・ガスを装備したEFEMの文脈において使用され得、または、通常の設備空気EFEMユニットにおいて使用され得る。
搬送チャンバーまたは他の密閉された環境の保護の外側で起こるウエハー搬送動作の間のウエハー汚染を緩和または防止するために、上記に説明されているバッファー・ガスを装備したEFEMおよびバッファー・ガス・ディストリビューターなどのようなシステムおよび技法を使用することに加えて、ウエハーは、また、マルチ・ウエハー・ストレージ・システムにおけるバッファー・ガスの導入を介して、マルチ・ウエハー・ストレージ・システムの範囲内で保護され得る。たとえば、先述のように、FOUPは、一般に、バッファー・ガスで充填され、それらの中に含有されているウエハーを汚染または損傷から保護する。FOUPは通過の間はシールされるので、それらは、バッファー・ガスで装填され得、バッファー・ガスは、FOUPの中で搬送されているウエハーとともに、FOUPの中にシールされている。しかし、FOUPがロード・ポートにおいて結合されると、FOUPの主開口部をシールするために使用されるドアが、フロント・オープニング・インターフェース・メカニズム(FIM)などを使用して取り外され得、FOUPの中に含有されているウエハーにアクセスすることを可能にする。FOUPのドアが取り外されると、内側にある可能性があるバッファー・ガスが、周辺環境の中へ自由に拡散することができる(そして、周辺環境における空気が、同様に、FOUPの中へ自由に拡散することができる)。FOUPドアが開けられた後のFOUPの中のバッファー・ガス環境の喪失に対処するために、追加的なバッファー・ガスが、1つまたは複数のFOUPバッファー・ガス・ポートを介して、FOUPの中へ流され得、1つまたは複数のFOUPバッファー・ガス・ポートは、たとえば、バッファー・ガスを得るために、および、バッファー・ガスをFOUPの内部に通すために、ロード・ポートの上のまたは半導体処理ツールの他の部分の上の特徴部と接続し得るポートである。FOUPバッファー・ガス・ポートは、FOUPがシールされた後にバッファー・ガスでFOUPを「チャージする」ために初期に使用される同じポートであることが可能である。
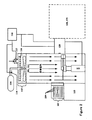
また、本発明者らのうちの何人かまたはすべては、EFEMなしの半導体処理ツールの文脈において、本明細書で説明されているバッファー・ガス・マイクロクライメイト・システムのうちの1つまたは複数、たとえば、水平スロットのコンセプトおよび/またはバッファー・ガス・ディストリビューターなどのようなシステムを実装することを考え出した。そのようなシステムは、半導体ウエハーがEFEMまたはFOUPの保護の外側で大きい距離を通過する可能性がある、非常に大型のマルチ・ステーション半導体処理ツールの文脈において、特に有用性のあるものである可能性がある。そのような大型のマルチ・ステーション半導体処理ツールのそのような例は、非常に大きい可能性があるので、そのようなツールの内部空間は、それがウエハー搬送エリアの周りにエンクロージャーを有することとなる場合には、非常に大きくなることとなり、(EFEMに関して図1から図5に示されているものと同様の)グローバル・バッファー・ガス・ディストリビューション・システムを実装することは、望ましくはエンクロージャーの中に低濃度の設備空気を実現するために、膨大な量のバッファー・ガスがエンクロージャーを介して流されることを必要とすることとなる。そのようなバッファー・ガス・流量は、先に説明されているように、重大なコストの問題および/または安全性の問題を提示することとなる。
Claims (61)
- 装置であって、
ロボット・アームと、
前記ロボット・アームに取り付けられ、前記ロボット・アームの移動の間、半導体ウエハーを支持するように構成されているエンド・エフェクターと、
前記半導体ウエハーが前記エンド・エフェクターによって支持されているときに、前記半導体ウエハーの対向表面にわたってバッファー・ガスを流すように構成されているバッファー・ガス・ディストリビューターと
を備え、
前記バッファー・ガス・ディストリビューターは、前記ロボット・アームの少なくともいくつかの移動の間、前記エンド・エフェクターと縦に並んで移動するように構成されており、
前記エンド・エフェクターおよび前記バッファー・ガス・ディストリビューターが、前記半導体ウエハーに対して垂直な軸線に沿って配列されている半導体ウエハーのスタックの中へ挿入可能であるように、前記バッファー・ガス・ディストリビューターおよび前記エンド・エフェクターは、垂直方向の軸線に沿って間隔を空けて配置されており、であり
前記バッファー・ガス・ディストリビューターおよび前記エンド・エフェクターは、半導体ウエハーの前記スタックにおけるウエハー間ギャップ内に適合するようにそれぞれサイズ決めされている、装置。 - 請求項1に記載の装置であって、前記バッファー・ガス・ディストリビューターは、前記エンド・エフェクターに対して間隙を空けて固定されており、前記ロボット・アームのすべての移動の間、前記エンド・エフェクターと縦に並んで移動する、装置。
- 請求項1に記載の装置であって、前記半導体ウエハーのアレイは、フロント・オープニング・ユニファイド・ポッド、ウエハー・ストッカー、ウエハー・バッファー、ロード・ロック、マルチ・ウエハー・カセット、および、サイド・バイ・サイド・マルチ・ウエハー・カセットからなる群から選択される1つまたは複数の機器におけるウエハー支持機能部によって画定されるウエハー間アレイ間隔を有している、装置。
- 請求項3に記載の装置であって、前記半導体ウエハーが前記エンド・エフェクターおよび前記1つまたは複数の機器のウエハー支持機能部の両方によって支持され、ならびに、前記バッファー・ガス・ディストリビューターが前記半導体ウエハーに対して垂直な第1の方向に沿って目視されたときに、前記半導体ウエハーと重なる前記バッファー・ガス・ディストリビューターの部分は、前記第1の方向に沿って目視されたときに、前記1つまたは複数の機器における前記ウエハー支持機能部と重ならない形状を有している、装置。
- 請求項1に記載の装置であって、
各ウエハー支持機能部は、前記エンド・エフェクターの方向を向くギャップを有しており、
前記バッファー・ガス・ディストリビューターは、前記ギャップよりも小さい、前記バッファー・ガス・ディストリビューターの長軸に対して垂直な方向の幅を有している、装置。 - 請求項1に記載の装置であって、
前記バッファー・ガス・ディストリビューターは、前記半導体ウエハーが前記エンド・エフェクターによって支持されているときに前記半導体ウエハーと重なる領域において、前記半導体ウエハーに対して垂直な方向に沿って、9mm以下の厚さであり、
前記バッファー・ガス・ディストリビューターは、
前記エンド・エフェクターの方を向く底部表面と、
前記バッファー・ガス・ディストリビューターの前記底部表面と反対側方向を向く上部表面と、
前記バッファー・ガス・ディストリビューターの前記上部表面と前記バッファー・ガス・ディストリビューターの前記底部表面との間に広がる1つまたは複数の側部表面と、
前記バッファー・ガス・ディストリビューターの前記底部表面の上に配置されている1つまたは複数の第1のガス・ディストリビューション・ポートと、
前記バッファー・ガス・ディストリビューターの前記側部表面の上に配置されている複数の第2のガス・ディストリビューション・ポートと、
前記1つまたは複数の第1のガス・ディストリビューション・ポートおよび前記複数の第2のガス・ディストリビューション・ポートにバッファー・ガスを供給するように構成されているガス・ディストリビューション通路と
を含む、装置。 - 請求項1に記載の装置であって、前記半導体ウエハーが前記エンド・エフェクターによって支持され、および、前記バッファー・ガス・ディストリビューターが前記半導体ウエハーに対して垂直な第1の方向に沿って目視されたときに、前記バッファー・ガス・ディストリビューターは、前記半導体ウエハーのすべてにわたっては延在していない、装置。
- 請求項7に記載の装置であって、前記半導体ウエハーが前記エンド・エフェクターによって支持され、および、前記バッファー・ガス・ディストリビューターが前記半導体ウエハーに対して垂直な前記第1の方向に沿って目視されたときに、前記バッファー・ガス・ディストリビューターは、
前記半導体ウエハーの中心軸線、および、前記エンド・エフェクターを前記ロボット・アームに接合する機械的な接続を通過する第2の方向に、前記半導体ウエハーの直径の少なくとも90%にわたって延在しており、
前記第1の方向および前記第2の方向の両方に対して垂直な第3の方向に前記半導体ウエハーの一部にわたって延在している、装置。 - 請求項1に記載の装置であって、前記半導体ウエハーが前記エンド・エフェクターによって支持され、および、前記半導体ウエハーに対して平行な軸線に沿って目視されたときに、前記バッファー・ガス・ディストリビューターの少なくとも最も外側の半分は、前記半導体ウエハーと重なっていない、装置。
- 請求項1に記載の装置であって、前記半導体ウエハーが前記エンド・エフェクターによって支持されているとき、前記半導体ウエハーの上に延在する前記バッファー・ガス・ディストリビューターの部分は、前記半導体ウエハーに対して平行な軸線に沿って目視されたときに、前記半導体ウエハーと重なっていない、装置。
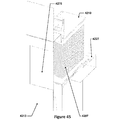
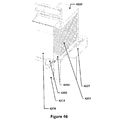
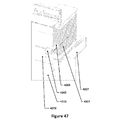
- 半導体ウエハーを処理するための装置であって、
エンクロージャーと、
垂直方向の軸線に沿って配列されたN個のウエハー支持構造体を有するマルチ・ウエハー・ストレージ・システムを支持するように構成されているインターフェースと、前記ウエハー支持構造体は、直径Dの半導体ウエハーを支持するようにサイズ決めされており、Nは、1よりも大きい整数であり、各半導体ウエハー支持構造体は、アレイにおける任意の隣接する1つまたは複数のウエハー支持構造体から平均距離dだけ間隔を空けて配置されており、
壁部と
を備え、
前記壁部は、Dよりも大きい幅および(N−1)・dよりも低い高さを有する水平スロットを含み、
前記壁部は、(2・N−1)・dよりも高い高さを有しており、
前記装置は、前記水平スロットと前記インターフェースの間で、前記垂直方向の軸線に沿って、相対的な平行移動を提供するように構成されており、
前記壁部は、前記マルチ・ウエハー・ストレージ・システムの開口部に近接するように位置決めされており、前記マルチ・ウエハー・ストレージ・システムが前記インターフェースによって支持されているときに、前記半導体ウエハーは、前記開口部を介して、前記マルチ・ウエハー・ストレージ・システムの中へロードされ得るか、または、前記マルチ・ウエハー・ストレージ・システムからアンロードされ得、
前記壁部を介して、前記半導体ウエハーが、前記マルチ・ウエハー・ストレージ・システムの中へロードされ得るか、または、前記マルチ・ウエハー・ストレージ・システムからアンロードされ得る前記壁部は、前記マルチ・ウエハー・ストレージ・システムが前記インターフェースによって支持されているときに、前記マルチ・ウエハー・ストレージ・システムの内部空間と前記エンクロージャーの内部空間との間に流量制限バリアを提供する、装置。 - 請求項11に記載の装置であって、さらに、
第1のバッファー・ガスを前記エンクロージャーの中へ供給するように構成されている第1のバッファー・ガス・ポートと、
前記マルチ・ウエハー・ストレージ・システムが前記インターフェースによって支持されているときに、第2のバッファー・ガスを前記マルチ・ウエハー・ストレージ・システムの中へ供給するように構成されている第2のバッファー・ガス・ポートと
を備える、装置。 - 請求項11に記載の装置であって、さらに、
ロボット・アームと、
前記ロボット・アームに取り付けられ、前記ロボット・アームの移動の間、半導体ウエハーを支持するように構成されているエンド・エフェクターと、
前記半導体ウエハーが前記エンド・エフェクターによって支持されているときに、前記半導体ウエハーの対向表面にわたって第1のバッファー・ガスを流すように構成されているバッファー・ガス・ディストリビューターと
を備え、
前記バッファー・ガス・ディストリビューターは、前記ロボット・アームの少なくともいくつかの移動の間、前記エンド・エフェクターと縦に並んで移動するように構成されており、
前記バッファー・ガス・ディストリビューターおよびエンド・エフェクターは、前記マルチ・ウエハー・ストレージ・システムが、前記装置に設置され、前記半導体ウエハーをストックしているときに、前記エンド・エフェクターおよび前記バッファー・ガス・ディストリビューターが前記水平スロットを介して、ウエハー支持構造体の前記アレイによって支持されている半導体ウエハーのアレイの中へ挿入可能であるように、間隔を空けて配置されており、
前記バッファー・ガス・ディストリビューターおよび前記エンド・エフェクターは、半導体ウエハーの前記アレイにおけるウエハー間ギャップ内に適合するようにそれぞれサイズ決めされている、装置。 - 請求項13に記載の装置であって、
第2のバッファー・ガスを前記エンクロージャーの中へ供給するように構成されている第1のバッファー・ガス・ポートと、
前記マルチ・ウエハー・ストレージ・システムが前記インターフェースによって支持されているときに、第3のバッファー・ガスを前記マルチ・ウエハー・ストレージ・システムの中へ供給するように構成されている第2のバッファー・ガス・ポートと
をさらに含む、装置。 - 請求項14に記載の装置であって、前記第1のバッファー・ガス、前記第2のバッファー・ガス、および、前記第3のバッファー・ガスは、設備窒素ガス供給源によってすべて提供される、装置。
- 請求項13に記載の装置であって、前記バッファー・ガス・ディストリビューターは、前記エンド・エフェクターに対して間隙を空けて固定されており、前記ロボット・アームのすべての移動の間、前記エンド・エフェクターと縦に並んで移動する、装置。
- 請求項11に記載の装置であって、さらに、前記マルチ・ウエハー・ストレージ・システムを備え、前記マルチ・ウエハー・ストレージ・システムは、前記インターフェースによって支持されている、装置。
- 請求項11に記載の装置であって、前記マルチ・ウエハー・ストレージ・システムは、フロント・オープニング・ユニファイド・ポッド、ウエハー・ストッカー、ウエハー・バッファー、マルチ・ウエハー・カセット、およびロード・ロックからなる群から選択される、装置。
- 請求項11に記載の装置であって、さらに、駆動機構を備え、前記駆動機構は、前記壁部を、前記垂直方向の軸線に沿って前記エンクロージャーに対して平行移動させるように構成されている、装置。
- 請求項11に記載の装置であって、さらに、駆動機構を備え、前記駆動機構は、前記インターフェースを、前記垂直方向の軸線に沿って前記エンクロージャーに対して平行移動させるように構成されている、装置。
- 請求項11に記載の装置であって、さらに、
ロボット・アームと、
前記ロボット・アームに取り付けられ、前記ロボット・アームの移動の間半導体ウエハーを支持するように構成されているエンド・エフェクターと
を備え、
前記水平スロットは、前記垂直方向の軸線に沿って第1の寸法を有する中間部分を有しており、前記第1の寸法は、前記中間部分とは異なる位置に位置する前記水平スロットの側方部分の前記垂直方向の軸線に沿う、対応する第2の寸法よりも大きく、
前記中間部分は、前記ロボット・アームの移動の間、前記半導体ウエハーを支持するように構成されている前記エンド・エフェクターの部分の幅よりも広く、
前記エンド・エフェクターは、半導体ウエハーが前記エンド・エフェクターによって支持されているときに、前記半導体ウエハーに接触するように構成されているウエハー接触表面を有し、
前記エンド・エフェクターは、1つまたは複数の第1の底部表面を有し、前記1つまたは複数の第1の底部表面は、前記ウエハー接触表面から離れる方向を向き、前記半導体ウエハーが前記エンド・エフェクターによって支持され、および、前記エンド・エフェクターが前記半導体ウエハーに対して垂直な方向に沿って目視されるときに、前記半導体ウエハーの外周部内に配置されており、
前記第1の寸法は、前記第2の寸法に、前記エンド・エフェクターの前記1つまたは複数の第1の底部表面の最も下側にある表面と前記ウエハー接触表面との間の垂直方向の距離を加えた寸法よりも大きいか、または、等しい、装置。 - 請求項21に記載の装置であって、
前記エンド・エフェクターは、1つまたは複数の第1の上側表面を有しており、前記1つまたは複数の第1の上側表面は、前記1つまたは複数の第1の底部表面から離れる方向向を向いており、半導体ウエハーを前記マルチ・ウエハー・ストレージ・システムに載置するために前記エンド・エフェクターが使用されるときに、前記水平スロットを通り、
前記第1の寸法は、前記エンド・エフェクターの前記1つまたは複数の第1の底部表面の前記最も下側にある表面と、前記エンド・エフェクターの前記1つまたは複数の第1の上側表面の最上部表面との間の垂直方向の距離よりも大きいか、または、等しい、装置。 - 請求項21に記載の装置であって、さらに、
前記半導体ウエハーが前記エンド・エフェクターによって支持されているときに、前記半導体ウエハーの対向表面にわたってバッファー・ガスを流すように構成されているバッファー・ガス・ディストリビューター
を備え、
前記バッファー・ガス・ディストリビューターは、前記ロボット・アームの少なくともいくつかの移動の間、前記エンド・エフェクターと縦に並んで移動するように構成されており、
前記バッファー・ガス・ディストリビューターおよびエンド・エフェクターは、前記マルチ・ウエハー・ストレージ・システムが、前記装置に設置されており、前記半導体ウエハーをストックしているときに、前記エンド・エフェクターおよび前記バッファー・ガス・ディストリビューターが、ウエハー支持構造体の前記アレイによって支持されている半導体ウエハーのアレイの中へ挿入可能であるように間隔を空けて配置されており、
前記バッファー・ガス・ディストリビューターおよび前記エンド・エフェクターは、半導体ウエハーの前記アレイにおけるウエハー間ギャップ内に適合するようにそれぞれサイズ決めされており、
前記バッファー・ガス・ディストリビューターは、1つまたは複数の第1の上側表面を有しており、前記1つまたは複数の第1の上側表面は、前記1つまたは複数の第1の底部表面から離れる方向を向いており、半導体ウエハーを前記マルチ・ウエハー・ストレージ・システムから除去するために前記エンド・エフェクターが使用されるときに、前記水平スロットを通り、
前記第1の寸法は、前記エンド・エフェクターの前記1つまたは複数の第1の底部表面の前記最も下側にある表面と、前記バッファー・ガス・ディストリビューターの前記1つまたは複数の第1の上側表面の最上部表面との間の垂直方向の距離よりも大きいか、または、等しい、装置。 - 装置であって、
異なる位置に位置決めされている複数のウエハー処理チャンバーと、
前記異なる位置において前記ウエハー処理チャンバーを支持するシャーシーと、
1つまたは複数のマルチ・ウエハー・カセットであって、各マルチ・ウエハー・カセットは、垂直方向の軸線に沿って配置されているN個のウエハー支持構造体を有し、前記ウエハー支持構造体は、直径Dの半導体ウエハーを支持するようにサイズ決めされており、Nは、1よりも大きい整数であり、各半導体ウエハー支持構造体は、前記アレイにおける任意の隣接する1つまたは複数のウエハー支持構造体から平均距離dだけ間隔を空けて配置され、
それぞれが、移動の間、半導体ウエハーを支持するように構成されているエンド・エフェクターを有する1つまたは複数のロボット・アームであって、前記1つまたは複数のロボット・アームは、前記1つまたは複数のマルチ・ウエハー・カセットから前記複数のウエハー処理チャンバーへ、および、前記1つまたは複数のマルチ・ウエハー・カセットへ、半導体ウエハーを搬送するように構成され、
a)前記1つまたは複数のマルチ・ウエハー・カセットのそれぞれの一部である少なくとも1つのスロット・ドア機構、b)前記1つまたは複数のエンド・エフェクターによって支持されている半導体ウエハーの対向表面にわたってバッファー・ガスを流すように構成されている1つまたは複数のバッファー・ガス・ディストリビューター、ならびに、c)a)およびb)の両方、からなる群から選択される少なくとも1つのバッファー・ガス・マイクロクライメイト・システムと
を備える、装置。 - 請求項24に記載の装置であって、前記少なくとも1つのバッファー・ガス・マイクロクライメイト・システムは、前記少なくとも1つのスロット・ドア機構を含み、前記少なくとも1つのスロット・ドア機構は、前記1つまたは複数のマルチ・ウエハー・カセットのそれぞれの一部であり、
各マルチ・ウエハー・カセットは、前面開口部を有しており、前記前面開口部は、ウエハーが前記マルチ・ウエハー・カセットの中へ挿入されることまたは前記マルチ・ウエハー・カセットから引き出されることを可能にするようにサイズ決めされており、
各スロット・ドア機構は、
Dよりも大きい幅および(N−1)・dよりも低い高さを有する水平スロットを備えるドアと、
機械的な入力に応答して、前記マルチ・ウエハー・カセットの前記ウエハー支持構造体に対して垂直方向に前記ドアを平行移動させるように構成されている駆動機構と、スロット・ドアは、前記マルチ・ウエハー・カセットの一部である、ことを含み、
各ドアは、(2・N−1)・dよりも高い高さを有しており、
各ドアは、前記マルチ・ウエハー・カセットの前記前面開口部の前方に位置決めされており、そのドアは、前記マルチ・ウエハー・カセットの一部である、装置。 - 請求項24に記載の装置であって、前記少なくとも1つのバッファー・ガス・マイクロクライメイト・システムは、前記1つまたは複数のエンド・エフェクターによって支持されている前記半導体ウエハーの対向表面にわたってバッファー・ガスを流すように構成されている前記1つまたは複数のバッファー・ガス・ディストリビューターを含み、
前記1つまたは複数のバッファー・ガス・ディストリビューターのそれぞれは、前記1つまたは複数のエンド・エフェクターのうちの異なる1つに関連付けられており、
各バッファー・ガス・ディストリビューターは、前記ロボット・アームの少なくともいくつかの移動の間、前記関連付けられたエンド・エフェクターと縦に並んで移動するように構成されており、前記関連付けられたエンド・エフェクターは、前記ロボット・アームの一部であり、
各バッファー・ガス・ディストリビューターおよび関連付けられたエンド・エフェクターは、間隔を空けて配置されており、当該バッファー・ガス・ディストリビューターおよび関連付けられたエンド・エフェクターは、N個の半導体ウエハーが前記N個のウエハー支持構造体によって支持されているときに、前記N個のウエハー支持構造体によって支持されている前記N個の半導体ウエハーのスタックの中へ挿入可能であり、
各バッファー・ガス・ディストリビューターおよび関連付けられたエンド・エフェクターは、N個の半導体ウエハーの前記スタックにおけるウエハー間ギャップ内に適合するようにそれぞれサイズ決めされている、装置。 - 請求項26に記載の装置であって、前記少なくとも1つのバッファー・ガス・マイクロクライメイト・システムは、また、前記少なくとも1つのスロット・ドア機構を含み、前記少なくとも1つのスロット・ドア機構は、前記1つまたは複数のマルチ・ウエハー・カセットのそれぞれの一部であり、
各マルチ・ウエハー・カセットは、前面開口部を有しており、前記前面開口部は、ウエハーが前記マルチ・ウエハー・カセットの中へ挿入されることまたは前記マルチ・ウエハー・カセットから引き出されることを可能にするようにサイズ決めされており、
各スロット・ドア機構は、
Dよりも大きい幅および(N−1)・dよりも低い高さを有する水平スロットを備えるドアと、
機械的な入力に応答して、前記マルチ・ウエハー・カセットの前記ウエハー支持構造体に対して垂直方向に前記ドアを平行移動させるように構成されている駆動機構と、そのスロット・ドアは、前記マルチ・ウエハー・カセットの一部であること、
を含み、
各ドアは、(2・N−1)・dよりも高い高さを有しており、
各ドアは、前記マルチ・ウエハー・カセットの前記前面開口部の前方に位置決めされており、そのドアは、前記マルチ・ウエハー・カセットの一部である、装置。 - 請求項25に記載の装置であって、さらに、前記1つまたは複数のマルチ・ウエハー・カセットのうちの少なくとも1つを受け入れ、水平方向の軸線に沿って、前記受け入れられた前記1つまたは複数のマルチ・ウエハー・カセットのうちの少なくとも1つを水平位置の間で平行移動させるように構成されている、水平ウエハー・カセット・コンベヤーを備え、
前記ウエハー処理チャンバーは、前記水平ウエハー・カセット・コンベヤーのいずれかの側において、間隔を空けて配置された位置に位置決めされており、
前記1つまたは複数のロボット・アームのうちの第1のロボット・アームは、第1のマルチ・ウエハー・カセットが少なくとも前記水平な位置のうちの第1の水平な位置に位置決めされているときに、前記1つまたは複数のマルチ・ウエハー・カセットのうちの前記第1のマルチ・ウエハー・カセットと、前記ウエハー処理チャンバーの第1のウエハー処理チャンバー、前記ウエハー処理チャンバーの第2のウエハー処理チャンバー、前記ウエハー処理チャンバーの第3のウエハー処理チャンバー、および、前記ウエハー処理チャンバーの第4のウエハー処理チャンバーの間で、半導体ウエハーを搬送するように構成されており、
前記第1のウエハー処理チャンバーおよび前記第2のウエハー処理チャンバーは、前記水平ウエハー・カセット・コンベヤーの第1の側に配置されており、
前記第3のウエハー処理チャンバーおよび前記第4のウエハー処理チャンバーは、前記水平ウエハー・カセット・コンベヤーの第2の側に配置されており、
前記水平ウエハー・カセット・コンベヤーの前記第1の側は、前記水平ウエハー・カセット・コンベヤーの前記第2の側に対して、前記水平ウエハー・カセット・コンベヤーの反対側にある、装置。 - 請求項28に記載の装置であって、さらに、1つまたは複数の垂直ウエハー・カセット・コンベヤーを備え、
各垂直ウエハー・カセット・コンベヤーは、前記水平位置のうちの異なる1つに関連付けられており、
前記1つまたは複数の垂直ウエハー・カセット・コンベヤーのうちの第1の垂直ウエハー・カセット・コンベヤーは、前記第1の水平位置に関連付けられており、
各垂直ウエハー・カセット・コンベヤーは、1つまたは複数の機械的なインターフェースを含み、
その機械的なインターフェースがそのマルチ・ウエハー・カセットと垂直方向に整合させられているとき、および、そのマルチ・ウエハー・カセットが、その垂直ウエハー・カセット・コンベヤーに関連付けられた前記水平位置に位置決めされ、ベースラインの垂直位置において、前記水平ウエハー・カセット・コンベヤーによって支持されているとき、各垂直ウエハー・カセット・コンベヤーのそれぞれの機械的なインターフェースは、前記1つまたは複数のマルチ・ウエハー・カセットのうちのマルチ・ウエハー・カセットと接続するように構成されており、
各垂直ウエハー・カセット・コンベヤーは、その垂直ウエハー・カセット・コンベヤーの中に含まれている前記1つまたは複数の機械的なインターフェース、および、それらの1つまたは複数の機械的なインターフェースが接続されている各マルチ・ウエハー・カセットを、垂直方向の軸線に沿って、1つまたは複数の垂直カセット位置へ平行移動させるように構成されており、
前記垂直カセット位置は、前記ベースラインの垂直位置と同じ高さに配置されておらず、
前記第1のロボット・アームは、前記第1のマルチ・ウエハー・カセットが前記第1の水平位置に位置決めされ、および、前記第1の垂直ウエハー・カセット・コンベヤーによって、前記1つまたは複数の垂直カセット位置のうちの第1の垂直カセット位置にも位置決めされているときに、前記第1のマルチ・ウエハー・カセットと、前記第1のウエハー処理チャンバー、前記第2のウエハー処理チャンバー、前記第3のウエハー処理チャンバー、および前記第4のウエハー処理チャンバーの間で、半導体ウエハーを搬送するように構成されている、装置。 - 請求項29に記載の装置であって、
各機械的なインターフェースは、少なくとも1つのバッファー・ガス・ポートを含み、
各マルチ・ウエハー・カセットは、少なくとも1つのバッファー・ガス入口部を含み、
各マルチ・ウエハー・カセットの前記少なくとも1つのバッファー・ガス入口部は、そのマルチ・ウエハー・カセットがその機械的なインターフェースにインターフェース接続されているときに、各機械的なインターフェースの前記少なくとも1つのバッファー・ガス・ポートに整合しており、それによって、バッファー・ガスがその少なくとも1つのバッファー・ガス・ポートおよび少なくとも1つのバッファー・ガス入口部を介してそのマルチ・ウエハー・カセットの内部空間へ導入されることを可能にする、装置。 - 請求項29に記載の装置であって、
前記1つまたは複数の垂直ウエハー・カセット・コンベヤーのうちの第2の垂直ウエハー・カセット・コンベヤーが、前記水平位置のうちの第2の水平位置に関連付けられており、
前記第1のロボット・アームは、前記第1の水平位置と前記第2の水平位置との間に配置されており、
各マルチ・ウエハー・カセットは、後面開口部も含み、前記後面開口部は、また、半導体ウエハーがそのマルチ・ウエハー・カセットの中へ挿入されることまたはそのマルチ・ウエハー・カセットから引き出されることを可能にするようにサイズ決めされており、そのマルチ・ウエハー・カセットの前記前面開口部の反対側にあり、
前記1つまたは複数のマルチ・ウエハー・カセットのそれぞれの一部である前記少なくとも1つのスロット・ドア機構は、各マルチ・ウエハー・カセットに関して、第2のスロット・ドア機構を含み、
各第2のスロット・ドア機構の前記ドアは、前記マルチ・ウエハー・カセットの前記後面開口部の前方に位置決めされており、その第2のスロット・ドア機構は、前記マルチ・ウエハー・カセットの一部であり、
前記第1のロボット・アームは、また、第2のマルチ・ウエハー・カセットが前記第2の垂直ウエハー・カセット・コンベヤーによって前記第2の水平位置および前記第1の垂直カセット位置に位置決めされているときに、前記第2のマルチ・ウエハー・カセットと、前記第1のウエハー処理チャンバー、前記第2のウエハー処理チャンバー、前記第3のウエハー処理チャンバー、および前記第4のウエハー処理チャンバーの間で、半導体ウエハーを搬送するように構成されており、
前記第2のマルチ・ウエハー・カセットは、前記1つまたは複数のマルチ・ウエハー・カセットのうちの1つである、装置。 - 請求項31に記載の装置であって、さらに、
1つまたは複数の垂直ロボット・アーム・コンベヤーと、
前記ウエハー処理チャンバーの第5のウエハー処理チャンバーと、
前記ウエハー処理チャンバーの第6のウエハー処理チャンバーと、
前記ウエハー処理チャンバーの第7のウエハー処理チャンバーと、
前記ウエハー処理チャンバーの第8のウエハー処理チャンバーと
を備え、
前記第5のウエハー処理チャンバー、前記第6のウエハー処理チャンバー、前記第7のウエハー処理チャンバー、および前記第8のウエハー処理チャンバーは、前記第1のウエハー処理チャンバー、前記第2のウエハー処理チャンバー、前記第3のウエハー処理チャンバー、および前記第4のウエハー処理チャンバーの上方に配置されており、
前記1つまたは複数の垂直ロボット・アーム・コンベヤーのそれぞれは、近隣の垂直ウエハー・カセット・コンベヤーの間に配置されており、
各垂直ロボット・アーム・コンベヤーは、前記垂直方向の軸線に沿って、1つまたは複数の垂直ロボット・アーム位置へ、前記1つまたは複数のロボット・アームのうちの対応する1つを平行移動させるように構成されており、
前記1つまたは複数の垂直ロボット・アーム位置のうちの第1の垂直ロボット・アーム位置は、前記第1の垂直カセット位置に関連付けられており、
前記1つまたは複数の垂直ロボット・アーム位置のうちの第2の垂直ロボット・アーム位置は、前記第1の垂直カセット位置とは異なる、前記1つまたは複数の垂直カセット位置のうちの第2の垂直カセット位置に関連付けられており、
前記第1のロボット・アームは、前記第1のマルチ・ウエハー・カセットが前記第1の水平位置および前記第1の垂直カセット位置に位置決めされ、ならびに、前記第1のロボット・アームが前記第1の垂直ロボット・アーム位置に位置決めされているときに、前記第1のマルチ・ウエハー・カセットと、前記第1のウエハー処理チャンバー、前記第2のウエハー処理チャンバー、前記第3のウエハー処理チャンバー、および前記第4のウエハー処理チャンバーの間で、半導体ウエハーを搬送するように構成されており、
前記第1のロボット・アームは、さらに、前記第1のマルチ・ウエハー・カセットが前記第1の水平位置および前記第2の垂直カセット位置に位置決めされ、ならびに、前記第1のロボット・アームが前記第2の垂直ロボット・アーム位置に位置決めされているときに、前記第1のマルチ・ウエハー・カセットと、前記第5のウエハー処理チャンバー、前記第6のウエハー処理チャンバー、前記第7のウエハー処理チャンバー、および前記第8のウエハー処理チャンバーの間で、半導体ウエハーを搬送するように構成されている、装置。 - 請求項32に記載の装置であって、
前記ウエハー処理チャンバーの第9のウエハー処理チャンバーと、
前記ウエハー処理チャンバーの第10のウエハー処理チャンバーと、
前記ウエハー処理チャンバーの第11のウエハー処理チャンバーと、
前記ウエハー処理チャンバーの第12のウエハー処理チャンバーと、
前記ウエハー処理チャンバーの第13のウエハー処理チャンバーと、
前記ウエハー処理チャンバーの第14のウエハー処理チャンバーと、
前記ウエハー処理チャンバーの第15のウエハー処理チャンバーと、
前記ウエハー処理チャンバーの第16のウエハー処理チャンバーと
をさらに含み、
前記第9のウエハー処理チャンバー、第10のウエハー処理チャンバー、第13のウエハー処理チャンバー、および第14のウエハー処理チャンバーは、前記水平ウエハー・カセット・コンベヤーの前記第1の側に配置されており、
前記第11のウエハー処理チャンバー、第12のウエハー処理チャンバー、第15のウエハー処理チャンバー、および第16のウエハー処理チャンバーは、前記水平ウエハー・カセット・コンベヤーの前記第2の側に配置されており、
前記第13のウエハー処理チャンバー、前記第14のウエハー処理チャンバー、前記第15のウエハー処理チャンバー、および前記第16のウエハー処理チャンバーは、前記第9のウエハー処理チャンバー、前記第10のウエハー処理チャンバー、前記第11のウエハー処理チャンバー、および前記第12のウエハー処理チャンバーの上方に配置されており、
前記第2の水平位置は、前記1つまたは複数のロボット・アームのうちの前記第1のロボット・アームと第2のロボット・アームとの間に配置されており、
前記第2のロボット・アームは、前記第2のマルチ・ウエハー・カセットが前記第2の水平位置および前記第1の垂直カセット位置に位置決めされ、ならびに、前記第2のロボット・アームが前記第1の垂直ロボット・アーム位置に位置決めされているときに、前記第2のマルチ・ウエハー・カセットと、前記第9のウエハー処理チャンバー、前記第10のウエハー処理チャンバー、前記第11のウエハー処理チャンバー、および前記第12のウエハー処理チャンバーの間で、半導体ウエハーを搬送するように構成されており、
前記第2のロボット・アームは、さらに、前記第2のマルチ・ウエハー・カセットが前記第2の水平位置および前記第2の垂直カセット位置に位置決めされ、ならびに、前記第2のロボット・アームが前記第2の垂直ロボット・アーム位置に位置決めされているときに、前記第2のマルチ・ウエハー・カセットと、前記第13のウエハー処理チャンバー、前記第14のウエハー処理チャンバー、前記第15のウエハー処理チャンバー、および前記第16のウエハー処理チャンバーの間で、半導体ウエハーを搬送するように構成されている、装置。 - 請求項33に記載の装置であって、前記少なくとも1つのバッファー・ガス・マイクロクライメイト・システムは、前記1つまたは複数のバッファー・ガス・ディストリビューターを含み、前記1つまたは複数のバッファー・ガス・ディストリビューターは、前記1つまたは複数のエンド・エフェクターによって支持されている前記半導体ウエハーの対向表面にわたってバッファー・ガスを流すように構成されており、
前記1つまたは複数のバッファー・ガス・ディストリビューターのそれぞれは、前記1つまたは複数のエンド・エフェクターのうちの異なる1つに関連付けられており、
各バッファー・ガス・ディストリビューターは、前記ロボット・アームの少なくともいくつかの移動の間、前記関連付けられたエンド・エフェクターと縦に並んで移動するように構成されており、前記関連付けられたエンド・エフェクターは、前記ロボット・アームの一部であり、
各バッファー・ガス・ディストリビューターおよび関連付けられたエンド・エフェクターは、間隔を空けて配置されており、そのバッファー・ガス・ディストリビューターおよび関連付けられたエンド・エフェクターは、N個の半導体ウエハーが前記N個のウエハー支持構造体によって支持されているときに、前記N個のウエハー支持構造体によって支持されている前記N個の半導体ウエハーのスタックの中へ挿入可能であり、
各バッファー・ガス・ディストリビューターおよび関連付けられたエンド・エフェクターは、N個の半導体ウエハーの前記スタックにおけるウエハー間ギャップ内に適合するようにそれぞれサイズ決めされている、装置。 - 請求項26に記載の装置であって、さらに、水平ウエハー・カセット・コンベヤーを備え、前記水平ウエハー・カセット・コンベヤーは、前記1つまたは複数のマルチ・ウエハー・カセットのうちの少なくとも1つを受け入れるように、および、水平位置同士の間で、水平方向の軸線に沿って、前記受け入れられた前記1つまたは複数のマルチ・ウエハー・カセットのうちの少なくとも1つを平行移動させるように構成されており、
前記ウエハー処理チャンバーは、前記水平ウエハー・カセット・コンベヤーのいずれかの側において、間隔を空けて配置された位置に位置決めされており、
前記1つまたは複数のロボット・アームのうちの第1のロボット・アームは、第1のマルチ・ウエハー・カセットが少なくとも前記水平位置のうちの第1の水平位置に位置決めされているときに、前記1つまたは複数のマルチ・ウエハー・カセットのうちの前記第1のマルチ・ウエハー・カセットと、前記ウエハー処理チャンバーの第1のウエハー処理チャンバー、前記ウエハー処理チャンバーの第2のウエハー処理チャンバー、前記ウエハー処理チャンバーの第3のウエハー処理チャンバー、および、前記ウエハー処理チャンバーの第4のウエハー処理チャンバーの間で、半導体ウエハーを搬送するように構成されており、
前記第1のロボット・アームは、前記1つまたは複数のバッファー・ガス・ディストリビューターのうちの第1のバッファー・ガス・ディストリビューターに関連付けられており、
前記第1のウエハー処理チャンバーおよび前記第2のウエハー処理チャンバーは、前記水平ウエハー・カセット・コンベヤーの第1の側に配置されており、
前記第3のウエハー処理チャンバーおよび前記第4のウエハー処理チャンバーは、前記水平ウエハー・カセット・コンベヤーの第2の側に配置されており、
前記水平ウエハー・カセット・コンベヤーの前記第1の側は、前記水平ウエハー・カセット・コンベヤーの前記第2の側に対して、前記水平ウエハー・カセット・コンベヤーの反対側にある、装置。 - 請求項35に記載の装置であって、1つまたは複数の垂直ウエハー・カセット・コンベヤーをさらに含み、
各垂直ウエハー・カセット・コンベヤーは、前記水平位置のうちの異なる1つに関連付けられており、
前記1つまたは複数の垂直ウエハー・カセット・コンベヤーのうちの第1の垂直ウエハー・カセット・コンベヤーは、前記第1の水平位置に関連付けられており、
各垂直ウエハー・カセット・コンベヤーは、1つまたは複数の機械的なインターフェースを含み、
その機械的なインターフェースがそのマルチ・ウエハー・カセットと垂直方向に整合させられているとき、および、そのマルチ・ウエハー・カセットが、その垂直ウエハー・カセット・コンベヤーに関連付けられた前記水平位置に位置決めされ、ベースラインの垂直位置において、前記水平ウエハー・カセット・コンベヤーによって支持されているとき、各垂直ウエハー・カセット・コンベヤーのそれぞれの機械的なインターフェースは、前記1つまたは複数のマルチ・ウエハー・カセットのうちのマルチ・ウエハー・カセットと接続するように構成されており、
各垂直ウエハー・カセット・コンベヤーは、その垂直ウエハー・カセット・コンベヤーの中に含まれている前記1つまたは複数の機械的なインターフェース、および、それらの1つまたは複数の機械的なインターフェースが接続されているそれぞれのマルチ・ウエハー・カセットを、垂直軸線に沿って、1つまたは複数の垂直カセット位置へ平行移動させるように構成されており、
前記垂直カセット位置は、前記ベースラインの垂直位置と同じ高さに配置されておらず、
前記第1のロボット・アームは、前記第1のマルチ・ウエハー・カセットが前記第1の水平位置に位置決めされ、および、前記第1の垂直ウエハー・カセット・コンベヤーによって、前記1つまたは複数の垂直カセット位置のうちの第1の垂直カセット位置にも位置決めされているときに、前記第1のマルチ・ウエハー・カセットと、前記第1のウエハー処理チャンバー、前記第2のウエハー処理チャンバー、前記第3のウエハー処理チャンバー、および前記第4のウエハー処理チャンバーの間で、半導体ウエハーを搬送するように構成されている、装置。 - 請求項36に記載の装置であって、
各機械的なインターフェースは、少なくとも1つのバッファー・ガス・ポートを含み、
各マルチ・ウエハー・カセットは、少なくとも1つのバッファー・ガス入口部を含み、
各マルチ・ウエハー・カセットの前記少なくとも1つのバッファー・ガス入口部は、そのマルチ・ウエハー・カセットがその機械的なインターフェースに接続されているときに、それぞれの機械的なインターフェースの前記少なくとも1つのバッファー・ガス・ポートに整合しており、それによって、バッファー・ガスがその少なくとも1つのバッファー・ガス・ポートおよび少なくとも1つのバッファー・ガス入口部を介してそのマルチ・ウエハー・カセットの内部空間へ導入されることを可能にする、装置。 - 請求項36に記載の装置であって、
前記1つまたは複数の垂直ウエハー・カセット・コンベヤーのうちの第2の垂直ウエハー・カセット・コンベヤーが、前記水平位置のうちの第2の水平位置に関連付けられており、
前記第1のロボット・アームは、前記第1の水平位置と前記第2の水平位置との間に配置されており、
各マルチ・ウエハー・カセットは、後面開口部も含み、前記後面開口部は、また、半導体ウエハーがそのマルチ・ウエハー・カセットの中へ挿入されることまたはそのマルチ・ウエハー・カセットから引き出されることを可能にするようにサイズ決めされており、そのマルチ・ウエハー・カセットの前記前面開口部の反対側にあり、
前記第1のロボット・アームは、また、第2のマルチ・ウエハー・カセットが前記第2の垂直ウエハー・カセット・コンベヤーによって前記第2の水平位置および前記第1の垂直カセット位置に位置決めされているときに、前記第2のマルチ・ウエハー・カセットと、前記第1のウエハー処理チャンバー、前記第2のウエハー処理チャンバー、前記第3のウエハー処理チャンバー、および前記第4のウエハー処理チャンバーの間で、半導体ウエハーを搬送するように構成されており、
前記第2のマルチ・ウエハー・カセットは、前記1つまたは複数のマルチ・ウエハー・カセットのうちの1つである、装置。 - 請求項38に記載の装置であって、
1つまたは複数の垂直ロボット・アーム・コンベヤーと、
前記ウエハー処理チャンバーの第5のウエハー処理チャンバーと、
前記ウエハー処理チャンバーの第6のウエハー処理チャンバーと、
前記ウエハー処理チャンバーの第7のウエハー処理チャンバーと、
前記ウエハー処理チャンバーの第8のウエハー処理チャンバーと
をさらに含み、
前記第5のウエハー処理チャンバー、前記第6のウエハー処理チャンバー、前記第7のウエハー処理チャンバー、および前記第8のウエハー処理チャンバーは、前記第1のウエハー処理チャンバー、前記第2のウエハー処理チャンバー、前記第3のウエハー処理チャンバー、および前記第4のウエハー処理チャンバーの上方に配置されており、
前記1つまたは複数の垂直ロボット・アーム・コンベヤーのそれぞれは、近隣の垂直ウエハー・カセット・コンベヤーの間に配置されており、
各垂直ロボット・アーム・コンベヤーは、前記垂直方向の軸線に沿って、1つまたは複数の垂直ロボット・アーム位置へ、前記1つまたは複数のロボット・アームのうちの対応する1つを平行移動させるように構成されており、
前記1つまたは複数の垂直ロボット・アーム位置のうちの第1の垂直ロボット・アーム位置は、前記第1の垂直カセット位置に関連付けられており、
前記1つまたは複数の垂直ロボット・アーム位置のうちの第2の垂直ロボット・アーム位置は、前記第1の垂直カセット位置とは異なる、前記1つまたは複数の垂直カセット位置のうちの第2の垂直カセット位置に関連付けられており、
前記第1のロボット・アームは、前記第1のマルチ・ウエハー・カセットが前記第1の水平位置および前記第1の垂直カセット位置に位置決めされ、ならびに、前記第1のロボット・アームが前記第1の垂直ロボット・アーム位置に位置決めされているときに、前記第1のマルチ・ウエハー・カセットと、前記第1のウエハー処理チャンバー、前記第2のウエハー処理チャンバー、前記第3のウエハー処理チャンバー、および前記第4のウエハー処理チャンバーの間で、半導体ウエハーを搬送するように構成されており、
前記第1のロボット・アームは、さらに、前記第1のマルチ・ウエハー・カセットが前記第1の水平位置および前記第2の垂直カセット位置に位置決めされ、ならびに、前記第1のロボット・アームが前記第2の垂直ロボット・アーム位置に位置決めされているときに、前記第1のマルチ・ウエハー・カセットと、前記第5のウエハー処理チャンバー、前記第6のウエハー処理チャンバー、前記第7のウエハー処理チャンバー、および前記第8のウエハー処理チャンバーの間で、半導体ウエハーを搬送するように構成されている、装置。 - 請求項39に記載の装置であって、
前記ウエハー処理チャンバーの第9のウエハー処理チャンバーと、
前記ウエハー処理チャンバーの第10のウエハー処理チャンバーと、
前記ウエハー処理チャンバーの第11のウエハー処理チャンバーと、
前記ウエハー処理チャンバーの第12のウエハー処理チャンバーと、
前記ウエハー処理チャンバーの第13のウエハー処理チャンバーと、
前記ウエハー処理チャンバーの第14のウエハー処理チャンバーと、
前記ウエハー処理チャンバーの第15のウエハー処理チャンバーと、
前記ウエハー処理チャンバーの第16のウエハー処理チャンバーと
をさらに含み、
前記第9のウエハー処理チャンバー、第10のウエハー処理チャンバー、第13のウエハー処理チャンバー、および第14のウエハー処理チャンバーは、前記水平ウエハー・カセット・コンベヤーの前記第1の側に配置されており、
前記第11のウエハー処理チャンバー、第12のウエハー処理チャンバー、第15のウエハー処理チャンバー、および第16のウエハー処理チャンバーは、前記水平ウエハー・カセット・コンベヤーの前記第2の側に配置されており、
前記第13のウエハー処理チャンバー、前記第14のウエハー処理チャンバー、前記第15のウエハー処理チャンバー、および前記第16のウエハー処理チャンバーは、前記第9のウエハー処理チャンバー、前記第10のウエハー処理チャンバー、前記第11のウエハー処理チャンバー、および前記第12のウエハー処理チャンバーの上方に配置されており、
前記第2の水平位置は、前記1つまたは複数のロボット・アームのうちの前記第1のロボット・アームと第2のロボット・アームとの間に配置されており、
前記第2のロボット・アームは、前記第2のマルチ・ウエハー・カセットが前記第2の水平位置および前記第1の垂直カセット位置に位置決めされ、ならびに、前記第2のロボット・アームが前記第1の垂直ロボット・アーム位置に位置決めされているときに、前記第2のマルチ・ウエハー・カセットと、前記第9のウエハー処理チャンバー、前記第10のウエハー処理チャンバー、前記第11のウエハー処理チャンバー、および前記第12のウエハー処理チャンバーの間で、半導体ウエハーを搬送するように構成されており、
前記第2のロボット・アームは、さらに、前記第2のマルチ・ウエハー・カセットが前記第2の水平位置および前記第2の垂直カセット位置に位置決めされ、ならびに、前記第2のロボット・アームが前記第2の垂直ロボット・アーム位置に位置決めされているときに、前記第2のマルチ・ウエハー・カセットと、前記第13のウエハー処理チャンバー、前記第14のウエハー処理チャンバー、前記第15のウエハー処理チャンバー、および前記第16のウエハー処理チャンバーの間で、半導体ウエハーを搬送するように構成されている、装置。 - 請求項40に記載の装置であって、前記少なくとも1つのバッファー・ガス・マイクロクライメイト・システムは、また、前記少なくとも1つのスロット・ドア機構を含み、前記少なくとも1つのスロット・ドア機構は、前記1つまたは複数のマルチ・ウエハー・カセットのそれぞれの一部であり、
各マルチ・ウエハー・カセットは、前面開口部を有しており、前記前面開口部は、ウエハーが前記マルチ・ウエハー・カセットの中へ挿入されることまたは前記マルチ・ウエハー・カセットから引き出されることを可能にするようにサイズ決めされており、
各スロット・ドア機構は、
Dよりも大きい幅および(N−1)・dよりも低い高さを有する水平スロットを備えるドアと、
機械的な入力に応答して、前記マルチ・ウエハー・カセットの前記ウエハー支持構造体に対して垂直方向に前記ドアを平行移動させるように構成されている駆動機構であって、そのスロット・ドアは、前記マルチ・ウエハー・カセットの一部である、駆動機構と
を含み、
各ドアは、(2・N−1)・dよりも高い高さを有しており、
各ドアは、前記マルチ・ウエハー・カセットの前記前面開口部の前方に位置決めされており、そのドアは、前記マルチ・ウエハー・カセットの一部である、装置。 - 半導体処理ツールのためのイクイップメント・フロント・エンド・モジュール(EFEM)であって、
前記EFEMの内部空間を少なくとも部分的に画定している1つまたは複数の壁部と、
前記EFEMの前記内部空間の中でウエハーを移動させるように構成されているウエハー・ハンドリング・ロボットと、
バッファー・ガスを供給するように構成されているバッファー・ガス・ポートであって、前記バッファー・ガスは、前記バッファー・ガス・ポートを介して前記EFEMの前記内部空間に供給され、
バッファー・ガス制御バルブであって、前記バッファー・ガス・ポートを通る前記バッファー・ガスの流量を調節するように構成されている、バッファー・ガス制御バルブと、
コントローラーであって、メモリーおよび前記バッファー・ガス制御バルブに通信可能に接続されている1つまたは複数のプロセッサーを含み、前記メモリーは、コンピューター実行可能なインストラクションであって、前記コントローラーに、
ウエハーが前記ロボットによって前記内部空間の中で移動している時を決定すること、
ウエハーが前記ロボットによって前記EFEMの前記内部空間の中で移動しているということを決定することに少なくとも部分的に応答して、前記バッファー・ガス制御バルブを第1の流量状態に移行させ、前記バッファー・ガスが前記EFEMの前記内部空間の中へ流れるようにすること、
ウエハーが前記ロボットによって前記EFEMの前記内部空間の中で移動していない時を決定すること、
ウエハーが前記ロボットによって前記EFEMの前記内部空間の中で移動していないということを決定することに少なくとも部分的に応答して、前記バッファー・ガスの流量が前記第1の流量状態におけるものよりも低い第2の流量状態に前記バッファー・ガス制御バルブを移行させること
を実行させるためのコンピューター実行可能なインストラクション
を含む、イクイップメント・フロント・エンド・モジュール(EFEM)。 - 請求項42に記載のEFEMであって、さらに、設備空気制御バルブを備え、前記設備空気制御バルブは、前記EFEMの前記内部空間を通る設備空気の流量を調節するように構成されており、
前記設備空気制御バルブは、前記コントローラーの前記1つまたは複数のプロセッサーと通信可能に接続されており、
前記メモリーは、さらに、前記コントローラーに、
ウエハーが前記ロボットによって前記EFEMの前記内部空間の中で移動していないということを決定することに少なくとも部分的に応答して、第3の流量状態に前記設備空気制御バルブを移行させ、前記設備空気が前記EFEMの前記内部空間の中へ流れるようにすること、
ウエハーが前記ロボットによって前記EFEMの前記内部空間の中で移動しているということを決定することに少なくとも部分的に応答して、前記設備空気の流量が前記第3の流量状態におけるものよりも低い第4の流量状態に前記設備空気制御バルブを移行させること
を実行させるためのコンピューター実行可能なインストラクションを含む、EFEM。 - 請求項42に記載のEFEMであって、さらに、
1つまたは複数のローディング・インターフェースであって、1つまたは複数のフロント・オープニング・ユニファイド・ポッド(FOUP)に接続するように構成されており、前記1つもしくは複数のFOUPのうちの1つから前記EFEMの内部空間の中へ、または、前記EFEMの前記内部空間から前記1つもしくは複数のFOUPのうちの1つの中へ、ウエハーが搬送されるようになっている、1つまたは複数のローディング・インターフェースと、
1つまたは複数のロード・ロックに接続するように構成されている1つまたは複数のロード・ロック・インターフェースであって、前記1つまたは複数のロード・ロックを介して、前記EFEMの前記内部空間から前記半導体処理ツールの処理エリアの中へ、または、前記半導体処理ツールの前記処理エリアから前記EFEMの前記内部空間の中へ、ウエハーが搬送され得る、1つまたは複数のロード・ロック・インターフェースと
をさらに含む、EFEM。 - 請求項42に記載のEFEMであって、前記ロボットは、複数の半導体ウエハーを同時に支持するように構成されているマルチ・ウエハー・エンド・エフェクターを含む、EFEM。
- 半導体処理ツールのためのイクイップメント・フロント・エンド・モジュール(EFEM)であって、
前記EFEMの内部空間を少なくとも部分的に画定している1つまたは複数の壁部と、
前記EFEMの前記内部空間を第1の内部サブ空間および第2の内部サブ空間へと分割する1つまたは複数の仕切り壁と、
バッファー・ガスを供給するように構成されているバッファー・ガス・ポートと、前記バッファー・ガスは、前記バッファー・ガス・ポートを介して前記第2の内部サブ空間に供給され、
前記第1の内部サブ空間の中でウエハーを移動させるように構成されている第1のウエハー・ハンドリング・ロボットと、
前記第2の内部サブ空間の中でウエハーを移動させるように構成されている第2のウエハー・ハンドリング・ロボットと、
前記第1の内部サブ空間を介して設備空気を流すように構成されている第1のガス・ハンドラーと、
前記第2の内部サブ空間を介して前記バッファー・ガスを流すように構成されている第2のガス・ハンドラーと
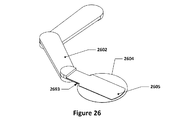
を備える、イクイップメント・フロント・エンド・モジュール(EFEM)。 - 半導体処理ツールのためのウエハー・ハンドリング・ロボットであって、
ロボット・アームと、
半導体ウエハーを支持するように構成されているエンド・エフェクターと、
前記半導体ウエハーが前記エンド・エフェクターによって支持されているときに、前記半導体ウエハーの上側表面にわたってバッファー・ガスを流すように構成されているバッファー・ガス・ディストリビューターと
を備え、
前記エンド・エフェクターは、前記ロボット・アームの端部に配置されており、
前記バッファー・ガス・ディストリビューターは、前記ロボット・アームによって直接的にまたは間接的に支持されており、
前記バッファー・ガス・ディストリビューターは、前記ロボット・アームの少なくともいくつかの移動に関して、前記エンド・エフェクターと縦に並んで移動するように構成されている、ウエハー・ハンドリング・ロボット。 - 請求項47に記載のウエハー・ハンドリング・ロボットであって、前記バッファー・ガス・ディストリビューターは、
ガス・ディストリビューション・パドルと、
サポート・アームと
を備え、
前記ガス・ディストリビューション・パドルは、第1の表面を有しており、前記第1の表面は、前記エンド・エフェクターを向き、前記エンド・エフェクターからずらされており、
前記第1の表面は、前記バッファー・ガスを前記エンド・エフェクターに向けて導くように構成されている1つまたは複数のバッファー・ガス・ディストリビューション・ポートを含み、
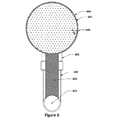
前記サポート・アームは、前記ガス・ディストリビューション・パドルを支持し、前記ロボット・アームによって支持されている、ウエハー・ハンドリング・ロボット。 - 請求項48に記載のウエハー・ハンドリング・ロボットであって、前記ガス・ディストリビューション・パドルは、実質的に円形の形状を有し、前記半導体ウエハーの直径の±10%よりも大きい外径を有しており、前記エンド・エフェクターは、前記半導体ウエハーを支持するように構成されている、ウエハー・ハンドリング・ロボット。
- 請求項49に記載のウエハー・ハンドリング・ロボットであって、さらに、回転ピボットを備え、
前記回転ピボットは、前記サポート・アームを前記ロボット・アームと接合しており、
前記回転ピボットは、前記ガス・ディストリビューション・パドルを、前記エンド・エフェクターが半導体ウエハーを支持しているときに、前記ガス・ディストリビューション・パドルが前記半導体ウエハーの上で中心に合わされている第1の位置から前記エンド・エフェクターが半導体ウエハーを支持しているときに、前記ガス・ディストリビューション・パドルが前記半導体ウエハーの上で中心に合わされていない第2の位置へ回転させるように構成されている、ウエハー・ハンドリング・ロボット。 - 請求項49に記載のウエハー・ハンドリング・ロボットであって、さらに、平行移動メカニズムを備え、
前記平行移動メカニズムは、前記サポート・アームを前記ロボット・アームと接合しており、
前記平行移動メカニズムは、前記ガス・ディストリビューション・パドルを、前記エンド・エフェクターが半導体ウエハーを支持しているときに、前記ガス・ディストリビューション・パドルが前記半導体ウエハーの上で中心に合わされている第1の位置から前記エンド・エフェクターが半導体ウエハーを支持しているときに、前記ガス・ディストリビューション・パドルが前記半導体ウエハーの上で中心に合わされていない、第2の位置へ平行移動させるように構成されている、ウエハー・ハンドリング・ロボット。 - 請求項48に記載のウエハー・ハンドリング・ロボットであって、
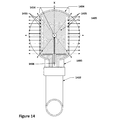
前記ガス・ディストリビューション・パドルは、前記ガス・ディストリビューション・パドルの1つまたは複数の側に、1つまたは複数の側部バッファー・ガス・ディストリビューション・ポートを含み、
前記側部バッファー・ガス・ディストリビューション・ポートは、前記エンド・エフェクターによって画定されるウエハー支持平面と平行の±30°の中の1つまたは複数の方向に、前記バッファー・ガスを流すように構成されている、ウエハー・ハンドリング・ロボット。 - 半導体製造において使用するためのフロント・オープニング・ユニファイド・ポッド(FOUP)に接続するための装置であって、前記FOUPは、取り外し可能なFOUPドアと、垂直スタックの中に配置されている複数のウエハー支持構造体とを含み、各ウエハー支持構造体は、直径Dの半導体ウエハーを支持するように構成されており、前記装置は、
FOUPを受け入れるように構成されているプラットフォームと、
ドアであって、Dよりも大きい幅、および、前記ウエハー支持構造体の前記垂直スタックの合計高さよりも低い高さを有する、水平スロットを含む、ドアと、
フロント・オープニング・インターフェース機構(FIM)であって、前記FOUPが前記プラットフォームの上に位置決めされた後に、前記取り外し可能なFOUPドアを前記FOUPから取り外すように構成されている、フロント・オープニング・インターフェース機構(FIM)と、
垂直方向の軸線に沿って前記ドアを移動させるように構成されているドライブ・ユニットと
を備える、装置。 - 請求項53に記載の装置であって、前記水平スロットの前記高さは、前記ウエハー支持構造体の前記垂直スタックの前記合計高さの50%よりも低い、装置。
- 請求項53に記載の装置であって、前記FOUPは、隣接するウエハー支持構造体同士の間に平均分離距離を有しており、前記水平スロットの前記高さは、前記平均分離距離の300%よりも小さい、装置。
- 請求項53に記載の装置であって、さらに、バッファー・ガス供給部ポートを備え、前記バッファー・ガス供給部ポートは、前記FOUPが前記プラットフォームの上に位置決めされているときに、前記FOUPの中へバッファー・ガスを流すように構成されている、装置。
- 半導体製造において使用するためのフロント・オープニング・ユニファイド・ポッド(FOUP)に接続するための装置であって、前記FOUPは、取り外し可能なFOUPドアと、垂直スタックの中に配置されている複数のウエハー支持構造体とを含み、各ウエハー支持構造体は、直径Dの半導体ウエハーを支持するように構成されており、前記装置は、
FOUPを受け入れるように構成されているプラットフォームと、
垂直方向の軸線に沿って前記プラットフォームを移動させるように構成されている垂直方向の駆動機構と、
壁部であって、Dよりも大きい幅、および、前記ウエハー支持構造体の前記垂直スタックの合計高さよりも低い高さを有する、水平スロットを含む、壁部と、
フロント・オープニング・インターフェース機構(FIM)であって、前記FOUPが前記プラットフォームの上に位置決めされた後に、および、前記プラットフォームが前記FOUPドアを前記FIMに整合させるように垂直方向に位置決めされた後に、前記取り外し可能なFOUPドアを前記FOUPから取り外すするように構成されている、フロント・オープニング・インターフェース機構(FIM)と
を備える、装置。 - 請求項53に記載の装置であって、前記水平スロットの前記高さは、前記ウエハー支持構造体の前記垂直スタックの前記合計高さの50%よりも低い、装置。
- 請求項53に記載の装置であって、前記FOUPは、隣接するウエハー支持構造体同士の間に平均分離距離を有しており、前記水平スロットの前記高さは、前記平均分離距離の300%よりも小さい、装置。
- 請求項53に記載の装置であって、前記FOUPは、隣接するウエハー支持構造体同士の間に平均分離距離を有しており、前記水平スロットの前記高さは、前記平均分離距離の300%よりも小さい、装置。
- 請求項53に記載の装置であって、さらに、バッファー・ガス供給部ポートを備え、前記バッファー・ガス供給部ポートは、前記FOUPが前記プラットフォームの上に位置決めされているときに、前記FOUPの中へバッファー・ガスを流すように構成されている、装置。
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562240404P | 2015-10-12 | 2015-10-12 | |
| US62/240,404 | 2015-10-12 | ||
| US201662286241P | 2016-01-22 | 2016-01-22 | |
| US62/286,241 | 2016-01-22 | ||
| US15/285,843 US10515834B2 (en) | 2015-10-12 | 2016-10-05 | Multi-station tool with wafer transfer microclimate systems |
| US15/285,843 | 2016-10-05 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017108112A true JP2017108112A (ja) | 2017-06-15 |
| JP2017108112A5 JP2017108112A5 (ja) | 2020-01-23 |
Family
ID=58635097
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016198583A Pending JP2017108112A (ja) | 2015-10-12 | 2016-10-07 | 水平スロットの実装および/または移動シャワーヘッドを含む、ウエハー搬送マイクロクライメイト技法および装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10515834B2 (ja) |
| JP (1) | JP2017108112A (ja) |
| KR (1) | KR20170054226A (ja) |
| CN (1) | CN107068601B (ja) |
| TW (1) | TW201727798A (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019140130A (ja) * | 2018-02-06 | 2019-08-22 | ローツェ株式会社 | 薄板状基板保持装置、及び保持装置を備える搬送ロボット |
| JP2020004839A (ja) * | 2018-06-28 | 2020-01-09 | 株式会社日立ハイテクマニファクチャ&サービス | 半導体ワーク搬送装置 |
| WO2020012669A1 (ja) * | 2018-07-13 | 2020-01-16 | ローツェ株式会社 | 局所パージ機能を有する搬送装置 |
| JP2020161601A (ja) * | 2019-03-26 | 2020-10-01 | キヤノン株式会社 | 搬送装置、搬送方法、リソグラフィ装置、リソグラフィシステム、および物品製造方法 |
| JP2020203338A (ja) * | 2019-06-17 | 2020-12-24 | 株式会社ディスコ | 加工装置 |
| JP2022505473A (ja) * | 2018-10-26 | 2022-01-14 | アプライド マテリアルズ インコーポレイテッド | 前面ダクト式機器フロントエンドモジュール、側面ストレージポッド、及びそれらの操作方法 |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6099945B2 (ja) * | 2012-11-22 | 2017-03-22 | 東京エレクトロン株式会社 | 蓋開閉機構、遮蔽機構及び容器の内部パージ方法 |
| US10354908B2 (en) * | 2016-11-29 | 2019-07-16 | Taiwan Semiconductor Manufacturing Company, Ltd. | Semiconductor tool with a shield |
| JP7084385B2 (ja) * | 2017-05-11 | 2022-06-14 | ローツェ株式会社 | 薄板状基板保持フィンガ、及びこのフィンガを備える搬送ロボット |
| JP6930224B2 (ja) * | 2017-05-31 | 2021-09-01 | Tdk株式会社 | Efem及びefemへの置換ガスの導入方法 |
| US10566216B2 (en) | 2017-06-09 | 2020-02-18 | Lam Research Corporation | Equipment front end module gas recirculation |
| US10403539B2 (en) * | 2017-08-04 | 2019-09-03 | Kawasaki Jukogyo Kabushiki Kaisha | Robot diagnosing method |
| CN108336002A (zh) * | 2018-03-16 | 2018-07-27 | 德淮半导体有限公司 | 清扫装置及清扫晶圆的方法、机械臂 |
| US11121014B2 (en) * | 2018-06-05 | 2021-09-14 | Asm Ip Holding B.V. | Dummy wafer storage cassette |
| JP7165754B2 (ja) * | 2018-06-07 | 2022-11-04 | エーシーエム リサーチ (シャンハイ) インコーポレーテッド | 半導体ウェハの洗浄装置及び洗浄方法 |
| CN112335030A (zh) * | 2018-06-18 | 2021-02-05 | 朗姆研究公司 | 占用面积减小的晶片搬运平台 |
| US11244844B2 (en) | 2018-10-26 | 2022-02-08 | Applied Materials, Inc. | High flow velocity, gas-purged, side storage pod apparatus, assemblies, and methods |
| JP7261000B2 (ja) * | 2018-12-03 | 2023-04-19 | キヤノン株式会社 | 容器、処理装置、異物除去方法、および物品の製造方法 |
| JP7320369B2 (ja) * | 2019-04-17 | 2023-08-03 | 株式会社アルバック | 基板処理装置 |
| US11929273B2 (en) * | 2019-08-30 | 2024-03-12 | Taiwan Semiconductor Manufacturing Company Limited | Semiconductor fabrication system and method |
| EP4158682A1 (en) * | 2020-05-29 | 2023-04-05 | LPE S.p.A. | Tool for handling substrates with overhead screen and relevant handling methods and epitaxial reactor |
| US12002696B2 (en) * | 2020-06-30 | 2024-06-04 | Brooks Automation Us, Llc | Substrate mapping apparatus and method therefor |
| CN111958615A (zh) * | 2020-08-19 | 2020-11-20 | 西安奕斯伟硅片技术有限公司 | 一种用于搬送晶圆的组件及方法 |
| KR102610837B1 (ko) * | 2020-12-29 | 2023-12-06 | 세메스 주식회사 | 기판과 기판을 접합하기 위한 기판 접합 설비에서의 기판 보관 및 정렬 장치 |
| US20230138326A1 (en) * | 2021-10-28 | 2023-05-04 | Applied Materials, Inc. | Model-Based Controlled Load Lock Pumping Scheme |
| KR102699857B1 (ko) * | 2023-04-17 | 2024-08-28 | 주식회사 동양기술 | 이상 감지 청정 유지 시스템 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003092335A (ja) * | 2001-09-18 | 2003-03-28 | Toshiba Corp | 基板搬送装置、これを用いた基板処理装置および基板処理方法 |
| JP2004281580A (ja) * | 2003-03-13 | 2004-10-07 | Seiko Epson Corp | 搬送装置及び搬送方法 |
| JP2006228808A (ja) * | 2005-02-15 | 2006-08-31 | Seiko Epson Corp | 基板搬送装置、基板搬送方法及び半導体製造装置 |
| JP2007273510A (ja) * | 2006-03-30 | 2007-10-18 | Dainippon Screen Mfg Co Ltd | 基板処理装置およびその製造方法 |
| JP2010232522A (ja) * | 2009-03-27 | 2010-10-14 | Dainippon Screen Mfg Co Ltd | 基板処理装置 |
| JP2013531363A (ja) * | 2010-04-30 | 2013-08-01 | 株式会社テラセミコン | 基板処理装置 |
Family Cites Families (70)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3105216A (en) * | 1960-12-19 | 1963-09-24 | Waters Mfg Inc | Potentiomerter |
| US4453785A (en) * | 1980-04-07 | 1984-06-12 | Smith Richard D | Modular cabinet for different video game cartridges, cassettes, and instruction booklets |
| US4306655A (en) * | 1980-04-07 | 1981-12-22 | Smith Richard D | Holder or container for tape cartridges |
| US5080549A (en) | 1987-05-11 | 1992-01-14 | Epsilon Technology, Inc. | Wafer handling system with Bernoulli pick-up |
| US5255970A (en) * | 1992-05-26 | 1993-10-26 | Theosabrata Yos S | Storage cabinet |
| US6645355B2 (en) * | 1996-07-15 | 2003-11-11 | Semitool, Inc. | Semiconductor processing apparatus having lift and tilt mechanism |
| US5720387A (en) * | 1997-01-15 | 1998-02-24 | Pantech International Inc. | Compact disk storage compartment |
| US6183183B1 (en) * | 1997-01-16 | 2001-02-06 | Asm America, Inc. | Dual arm linear hand-off wafer transfer assembly |
| US20010048866A1 (en) | 1997-12-01 | 2001-12-06 | Fumio Sakiya | Container and loader for substrate |
| US6501070B1 (en) * | 1998-07-13 | 2002-12-31 | Newport Corporation | Pod load interface equipment adapted for implementation in a fims system |
| US6427096B1 (en) | 1999-02-12 | 2002-07-30 | Honeywell International Inc. | Processing tool interface apparatus for use in manufacturing environment |
| US8348583B2 (en) | 1999-10-19 | 2013-01-08 | Rorze Corporation | Container and loader for substrate |
| JP3559213B2 (ja) | 2000-03-03 | 2004-08-25 | 株式会社半導体先端テクノロジーズ | ロードポート及びそれを用いた生産方式 |
| US6652212B2 (en) | 2000-05-02 | 2003-11-25 | Ckd Corporation | Cylinder, load port using it, and production system |
| US6540467B1 (en) * | 2001-06-18 | 2003-04-01 | Lsi Logic Corporation | Apparatus and method of semiconductor wafer protection |
| JP4219579B2 (ja) * | 2001-07-24 | 2009-02-04 | 東京エレクトロン株式会社 | ウエハ移載システム及びウエハ移載方法、並びに無人搬送車システム |
| JP4669643B2 (ja) | 2001-09-17 | 2011-04-13 | ローツェ株式会社 | ウエハマッピング装置およびそれを備えたロードポート |
| US7153079B2 (en) * | 2001-09-18 | 2006-12-26 | Murata Kikai Kabushiki Kaisha | Automated guided vehicle |
| CN100499060C (zh) | 2001-11-14 | 2009-06-10 | 罗兹株式会社 | 晶片定位方法和装置,晶片加工系统及晶片定位装置的晶片座旋转轴定位方法 |
| WO2003049181A1 (fr) | 2001-12-04 | 2003-06-12 | Rorze Corporation | Dispositif destine aux operations temporaires de chargement, maintien et dechargement |
| JP2003170384A (ja) | 2001-12-04 | 2003-06-17 | Rorze Corp | 平板状物の搬送用スカラ型ロボットおよび平板状物の処理システム |
| JP4260423B2 (ja) | 2002-05-30 | 2009-04-30 | ローツェ株式会社 | 円盤状物の基準位置教示方法、位置決め方法および搬送方法並びに、それらの方法を使用する円盤状物の基準位置教示装置、位置決め装置、搬送装置および半導体製造設備 |
| JP4354675B2 (ja) | 2002-06-04 | 2009-10-28 | ローツェ株式会社 | 薄板状電子部品クリーン移載装置および薄板状電子製品製造システム |
| JPWO2003105216A1 (ja) * | 2002-06-07 | 2005-10-13 | 平田機工株式会社 | 容器搬送システム |
| US6929299B2 (en) * | 2002-08-20 | 2005-08-16 | Asm America, Inc. | Bonded structures for use in semiconductor processing environments |
| KR100497820B1 (ko) | 2003-01-06 | 2005-07-01 | 로체 시스템즈(주) | 유리판절단장치 |
| JP4337059B2 (ja) | 2003-03-21 | 2009-09-30 | ローツェ システムズ コーポレーション | ガラス板切断装置 |
| WO2004085120A1 (ja) | 2003-03-25 | 2004-10-07 | Rorze Corporation | ロボットシミュレーション装置、および、シミュレーションプログラム |
| DE112004003075B4 (de) | 2003-07-17 | 2013-08-01 | Rorze Corp. | Filme mit niedriger Dielektrizitätskonstante und Herstellungsverfahren für diese Filme sowie elektronische Bauteile, die diese Filme verwenden |
| AU2003261993A1 (en) | 2003-09-08 | 2005-04-06 | Rorze Corporation | Linear motor |
| DE112004003055B4 (de) | 2003-10-22 | 2012-08-30 | Rorze Corp. | Flüssige Zusammensetzung mit dispergierten Diamantpartikeln, Herstellungsverfahren dafür und Verwendung zum Herstellen eines Abrasivstoffes |
| KR100555620B1 (ko) * | 2003-10-28 | 2006-03-03 | 주식회사 디엠에스 | 기판 운반시스템 및 운반방법 |
| US20060216137A1 (en) | 2004-07-02 | 2006-09-28 | Katsunori Sakata | Carrying apparatus and carrying control method for sheet-like substrate |
| JP4452279B2 (ja) | 2004-07-09 | 2010-04-21 | ローツェ株式会社 | 駆動源および搬送ロボット |
| US20070209593A1 (en) | 2006-03-07 | 2007-09-13 | Ravinder Aggarwal | Semiconductor wafer cooling device |
| JP5226508B2 (ja) | 2006-05-16 | 2013-07-03 | ローツェ株式会社 | シャトル型搬送装置 |
| US20090016862A1 (en) * | 2007-07-12 | 2009-01-15 | Gould Richard H | Method and apparatus for providing flat panel display environmental isolation |
| KR101660992B1 (ko) | 2008-05-27 | 2016-09-28 | 로제 가부시키가이샤 | 반송 장치, 위치 교시 방법 및 센서 지그 |
| US8827695B2 (en) | 2008-06-23 | 2014-09-09 | Taiwan Semiconductor Manufacturing Company, Ltd. | Wafer's ambiance control |
| EP2292728B9 (en) | 2008-07-01 | 2016-07-20 | Rorze Corporation | Constant-temperature equipment |
| JP5711965B2 (ja) | 2008-07-01 | 2015-05-07 | ローツェ株式会社 | 恒温装置 |
| US7897525B2 (en) * | 2008-12-31 | 2011-03-01 | Archers Inc. | Methods and systems of transferring, docking and processing substrates |
| JP2013006222A (ja) | 2009-10-14 | 2013-01-10 | Rorze Corp | 薄板状物の把持装置、および薄板状物の把持方法 |
| WO2011065325A1 (ja) | 2009-11-27 | 2011-06-03 | ローツェ株式会社 | 搬送アーム、及びこれを備える搬送ロボット |
| JP5933450B2 (ja) | 2010-11-26 | 2016-06-08 | ローツェ株式会社 | ロボットの制御装置および制御方法 |
| JP6106176B2 (ja) * | 2011-09-14 | 2017-03-29 | ブルックス オートメーション インコーポレイテッド | ロードステーション |
| US9048271B2 (en) | 2011-09-29 | 2015-06-02 | Asm International N.V. | Modular semiconductor processing system |
| KR101258403B1 (ko) | 2011-12-09 | 2013-04-30 | 로체 시스템즈(주) | 강화유리 기판 절단방법 |
| KR101251880B1 (ko) | 2011-12-29 | 2013-04-08 | 로체 시스템즈(주) | 웨이퍼 식각장치 및 이를 이용한 웨이퍼 식각방법 |
| TWI725303B (zh) * | 2012-02-10 | 2021-04-21 | 美商布魯克斯自動機械公司 | 基材處理設備 |
| US8676375B2 (en) | 2012-02-27 | 2014-03-18 | Veeco Instruments Inc. | Automated cassette-to-cassette substrate handling system |
| CN104221136B (zh) | 2012-04-16 | 2017-05-31 | 日商乐华股份有限公司 | 收纳容器、收纳容器的开闭器开闭单元、及使用它们的晶圆储料器 |
| KR101355807B1 (ko) | 2012-09-11 | 2014-02-03 | 로체 시스템즈(주) | 비금속 재료의 곡선 절단방법 |
| US9275886B2 (en) | 2012-10-29 | 2016-03-01 | Rorze Corporation | Device and method for detecting position of semiconductor substrate |
| US20140119858A1 (en) * | 2012-10-31 | 2014-05-01 | Sandisk 3D Llc | Semiconductor Device Manufacturing Line |
| JP6099945B2 (ja) * | 2012-11-22 | 2017-03-22 | 東京エレクトロン株式会社 | 蓋開閉機構、遮蔽機構及び容器の内部パージ方法 |
| KR101372805B1 (ko) | 2012-11-30 | 2014-03-19 | 로체 시스템즈(주) | 웨이퍼 식각 시스템 및 이를 이용한 웨이퍼 식각 공정 |
| US9545724B2 (en) | 2013-03-14 | 2017-01-17 | Brooks Automation, Inc. | Tray engine with slide attached to an end effector base |
| JP6198043B2 (ja) | 2013-06-06 | 2017-09-20 | Tdk株式会社 | ロードポートユニット及びefemシステム |
| WO2015005192A1 (ja) | 2013-07-09 | 2015-01-15 | 株式会社日立国際電気 | 基板処理装置、ガスパージ方法、半導体装置の製造方法、及び異常処理プログラムが格納された記録媒体 |
| JP6268425B2 (ja) | 2013-07-16 | 2018-01-31 | シンフォニアテクノロジー株式会社 | Efem、ロードポート、ウェーハ搬送方法 |
| CN104347460B (zh) * | 2013-08-01 | 2017-03-15 | 中微半导体设备(上海)有限公司 | 晶圆传递腔室 |
| US20150088798A1 (en) * | 2013-09-23 | 2015-03-26 | Mastercard International Incorporated | Detecting behavioral patterns and anomalies using metadata |
| JP6032372B2 (ja) | 2013-09-26 | 2016-11-30 | 村田機械株式会社 | パージ装置及びパージ方法 |
| US9272315B2 (en) | 2013-10-11 | 2016-03-01 | Taiwan Semiconductor Manufacturing Co., Ltd | Mechanisms for controlling gas flow in enclosure |
| JP6287048B2 (ja) | 2013-10-23 | 2018-03-07 | Tdk株式会社 | 基板搬送方法 |
| TWI629744B (zh) | 2013-11-11 | 2018-07-11 | 昕芙旎雅股份有限公司 | Surrounding gas replacement device, substrate transfer device, substrate transfer system, and EFEM |
| TWI814621B (zh) | 2013-12-13 | 2023-09-01 | 日商昕芙旎雅股份有限公司 | 搬運室 |
| US10134621B2 (en) | 2013-12-17 | 2018-11-20 | Brooks Automation, Inc. | Substrate transport apparatus |
| JP6291878B2 (ja) | 2014-01-31 | 2018-03-14 | シンフォニアテクノロジー株式会社 | ロードポート及びefem |
-
2016
- 2016-10-05 US US15/285,843 patent/US10515834B2/en active Active
- 2016-10-07 KR KR1020160129591A patent/KR20170054226A/ko unknown
- 2016-10-07 TW TW105132498A patent/TW201727798A/zh unknown
- 2016-10-07 JP JP2016198583A patent/JP2017108112A/ja active Pending
- 2016-10-08 CN CN201610879720.9A patent/CN107068601B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003092335A (ja) * | 2001-09-18 | 2003-03-28 | Toshiba Corp | 基板搬送装置、これを用いた基板処理装置および基板処理方法 |
| JP2004281580A (ja) * | 2003-03-13 | 2004-10-07 | Seiko Epson Corp | 搬送装置及び搬送方法 |
| JP2006228808A (ja) * | 2005-02-15 | 2006-08-31 | Seiko Epson Corp | 基板搬送装置、基板搬送方法及び半導体製造装置 |
| JP2007273510A (ja) * | 2006-03-30 | 2007-10-18 | Dainippon Screen Mfg Co Ltd | 基板処理装置およびその製造方法 |
| JP2010232522A (ja) * | 2009-03-27 | 2010-10-14 | Dainippon Screen Mfg Co Ltd | 基板処理装置 |
| JP2013531363A (ja) * | 2010-04-30 | 2013-08-01 | 株式会社テラセミコン | 基板処理装置 |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019140130A (ja) * | 2018-02-06 | 2019-08-22 | ローツェ株式会社 | 薄板状基板保持装置、及び保持装置を備える搬送ロボット |
| JP7037379B2 (ja) | 2018-02-06 | 2022-03-16 | ローツェ株式会社 | 薄板状基板保持装置、及び保持装置を備える搬送ロボット |
| JP2020004839A (ja) * | 2018-06-28 | 2020-01-09 | 株式会社日立ハイテクマニファクチャ&サービス | 半導体ワーク搬送装置 |
| JP7061031B2 (ja) | 2018-06-28 | 2022-04-27 | 株式会社日立ハイテク | 半導体ワーク搬送装置 |
| WO2020012669A1 (ja) * | 2018-07-13 | 2020-01-16 | ローツェ株式会社 | 局所パージ機能を有する搬送装置 |
| JP2020013814A (ja) * | 2018-07-13 | 2020-01-23 | ローツェ株式会社 | 局所パージ機能を有する搬送装置 |
| JP2022505473A (ja) * | 2018-10-26 | 2022-01-14 | アプライド マテリアルズ インコーポレイテッド | 前面ダクト式機器フロントエンドモジュール、側面ストレージポッド、及びそれらの操作方法 |
| JP7365408B2 (ja) | 2018-10-26 | 2023-10-19 | アプライド マテリアルズ インコーポレイテッド | 前面ダクト式機器フロントエンドモジュール、側面ストレージポッド、及びそれらの操作方法 |
| JP2020161601A (ja) * | 2019-03-26 | 2020-10-01 | キヤノン株式会社 | 搬送装置、搬送方法、リソグラフィ装置、リソグラフィシステム、および物品製造方法 |
| JP7341694B2 (ja) | 2019-03-26 | 2023-09-11 | キヤノン株式会社 | 搬送装置、搬送方法、リソグラフィ装置、リソグラフィシステム、および物品製造方法 |
| JP2020203338A (ja) * | 2019-06-17 | 2020-12-24 | 株式会社ディスコ | 加工装置 |
| JP7323342B2 (ja) | 2019-06-17 | 2023-08-08 | 株式会社ディスコ | 加工装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US10515834B2 (en) | 2019-12-24 |
| KR20170054226A (ko) | 2017-05-17 |
| CN107068601B (zh) | 2020-06-16 |
| CN107068601A (zh) | 2017-08-18 |
| US20170125272A1 (en) | 2017-05-04 |
| TW201727798A (zh) | 2017-08-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10515834B2 (en) | Multi-station tool with wafer transfer microclimate systems | |
| JP7263639B2 (ja) | 基板搬送部 | |
| US10930536B2 (en) | Workpiece stocker with circular configuration | |
| KR102417929B1 (ko) | 기판 처리 장치 | |
| US8491248B2 (en) | Loadlock designs and methods for using same | |
| TWI701757B (zh) | 裝載裝置、及基板處理系統 | |
| KR101518103B1 (ko) | 덮개 개폐 장치 | |
| JP5814362B2 (ja) | 移送および格納容器の処理装置 | |
| KR102626528B1 (ko) | 국소 퍼지 기능을 갖는 반송 장치 | |
| JP6706935B2 (ja) | 基板処理装置 | |
| JPH10256346A (ja) | カセット搬出入機構及び半導体製造装置 | |
| JP2024023874A (ja) | 基板処理装置及び基板収納容器保管方法 | |
| KR20130035198A (ko) | 모듈식 반도체 처리 시스템 | |
| JP4790326B2 (ja) | 処理システム及び処理方法 | |
| JP5279576B2 (ja) | 基板処理装置 | |
| JP2018098387A (ja) | 基板処理装置 | |
| JP2018093087A (ja) | 基板処理装置 | |
| US20020153578A1 (en) | Wafer buffering system | |
| KR102278078B1 (ko) | 기판 반송 장치 및 기판 처리 장치 | |
| JP7488442B2 (ja) | 搬送システム | |
| KR20230063970A (ko) | 기판 처리 장치 및 기판 처리 방법 | |
| KR20240079968A (ko) | 기판 처리 장치 및 기판 처리 방법 | |
| KR20240096824A (ko) | 스토커 시스템 | |
| TW202312233A (zh) | 具有冗餘度的工廠介面 | |
| KR20240122914A (ko) | 하이브리드 기판 본딩 시스템을 위한 foup 또는 카세트 저장소 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170306 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191007 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191007 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191203 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201126 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201208 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20210629 |