KR20170054226A - 수평 슬롯 구현예들 및/또는 이동하는 샤워헤드들을 포함한, 웨이퍼 이송 미기후 기법들 및 장치들 - Google Patents
수평 슬롯 구현예들 및/또는 이동하는 샤워헤드들을 포함한, 웨이퍼 이송 미기후 기법들 및 장치들 Download PDFInfo
- Publication number
- KR20170054226A KR20170054226A KR1020160129591A KR20160129591A KR20170054226A KR 20170054226 A KR20170054226 A KR 20170054226A KR 1020160129591 A KR1020160129591 A KR 1020160129591A KR 20160129591 A KR20160129591 A KR 20160129591A KR 20170054226 A KR20170054226 A KR 20170054226A
- Authority
- KR
- South Korea
- Prior art keywords
- wafer
- buffer gas
- processing chamber
- cassette
- wafer processing
- Prior art date
Links
Images
















































Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/673—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere using specially adapted carriers or holders; Fixing the workpieces on such carriers or holders
- H01L21/6735—Closed carriers
- H01L21/67389—Closed carriers characterised by atmosphere control
- H01L21/67393—Closed carriers characterised by atmosphere control characterised by the presence of atmosphere modifying elements inside or attached to the closed carrierl
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
- H01L21/02104—Forming layers
- H01L21/02107—Forming insulating materials on a substrate
- H01L21/02296—Forming insulating materials on a substrate characterised by the treatment performed before or after the formation of the layer
- H01L21/02299—Forming insulating materials on a substrate characterised by the treatment performed before or after the formation of the layer pre-treatment
- H01L21/02312—Forming insulating materials on a substrate characterised by the treatment performed before or after the formation of the layer pre-treatment treatment by exposure to a gas or vapour
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67017—Apparatus for fluid treatment
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67126—Apparatus for sealing, encapsulating, glassing, decapsulating or the like
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67155—Apparatus for manufacturing or treating in a plurality of work-stations
- H01L21/67161—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the layout of the process chambers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67155—Apparatus for manufacturing or treating in a plurality of work-stations
- H01L21/67161—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the layout of the process chambers
- H01L21/67178—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the layout of the process chambers vertical arrangement
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67155—Apparatus for manufacturing or treating in a plurality of work-stations
- H01L21/6719—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the construction of the processing chambers, e.g. modular processing chambers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67155—Apparatus for manufacturing or treating in a plurality of work-stations
- H01L21/67201—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the construction of the load-lock chamber
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/673—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere using specially adapted carriers or holders; Fixing the workpieces on such carriers or holders
- H01L21/67346—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere using specially adapted carriers or holders; Fixing the workpieces on such carriers or holders characterized by being specially adapted for supporting a single substrate or by comprising a stack of such individual supports
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/673—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere using specially adapted carriers or holders; Fixing the workpieces on such carriers or holders
- H01L21/6735—Closed carriers
- H01L21/67389—Closed carriers characterised by atmosphere control
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
- H01L21/67715—Changing the direction of the conveying path
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
- H01L21/67736—Loading to or unloading from a conveyor
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67742—Mechanical parts of transfer devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67766—Mechanical parts of transfer devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67772—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading involving removal of lid, door, cover
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67778—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading involving loading and unloading of wafers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67778—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading involving loading and unloading of wafers
- H01L21/67781—Batch transfer of wafers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67784—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations using air tracks
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68707—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a robot blade, or gripped by a gripper for conveyance
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Robotics (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Manipulator (AREA)
Abstract
반도체 프로세싱 챔버에 외부인 환경들에서 반도체 웨이퍼들 주위에 버퍼 가스 미기후들 (microclimates) 을 형성하기 위한 시스템들 및 기법들이 개시된다. 이러한 시스템들은 멀티-웨이퍼 저장 시스템으로부터 버퍼 가스의 유출을 제한하는 동안 단일의 웨이퍼들로 하여금 멀티-웨이퍼 스택으로부터 제거되게 할 수도 있는 슬롯 도어들, 뿐만 아니라 웨이퍼들을 이송하도록 사용되는 로봇 암들과, 이러한 로봇 암들의 이동들의 적어도 일부에 대해 동시에 이동하는 버퍼 가스 분배기들을 포함할 수도 있다.
Description
반도체 프로세싱 설비들에서, 반도체 웨이퍼들이 FOUP (front-opening unified pod) 를 사용하여 반도체 프로세싱 툴로부터 반도체 프로세싱 툴로 수송되는 것은 흔한 일이다. FOUP는 통상적으로 웨이퍼 지지 구조체들의 수직 스택을 가진 캐리어 하우징, 예를 들어, 하우징의 측벽들로부터 돌출하고, 이격된 스택의 복수의 웨이퍼들을 지지하는 선반들을 포함한다. 통상적인 FOUP는 25 개 또는 30 개의 웨이퍼들을 홀딩할 수도 있지만, 다른 수용력들을 가진 FOUP들도 가능하다. 웨이퍼들은, 웨이퍼 핸들링 로봇이 스택 내의 인접한 웨이퍼들 사이에 엔드 이펙터를 삽입할 수도 있고 웨이퍼를 들어올릴 수도 있고 그리고 다른 웨이퍼들을 건드리지 않고 웨이퍼를 철수할 수도 있도록 FOUP 내에서 이격된다.
FOUP들은 통상적으로 주변 환경으로부터 FOUP를 시일링하도록 사용될 수도 있는 이동식 FOUP 도어를 포함하고; FOUP는 반도체 프로세싱 설비 내의 주변 환경의 조건들로부터, 예를 들어, 수분 또는 산소로부터 FOUP 내의 웨이퍼들을 보호하는 일부 유형의 버퍼 가스로 충진될 수도 있다. 버퍼 가스는, 예를 들어, 설비 공기보다 바람직하다고 여겨지는 세정 건조 공기, 질소, 또는 임의의 다른 가스일 수도 있다. 그러나, 버퍼 가스는 EFEM (equipment front end module) 을 통해 통상적으로 흐르는 설비 공기와 동일하지 않다.
이 명세서에 기술된 주제의 하나 이상의 구현예들의 상세들은 첨부된 도면들 및 이하의 기술에 제시된다. 다른 특징들, 양태들, 및 이점들이 기술, 도면들, 및 청구항들로부터 분명해질 것이다.
일부 구현예들에서, 로봇 암, 로봇 암에 부착되고 그리고 로봇 암의 이동 동안 반도체 웨이퍼를 지지하도록 구성된 엔드 이펙터, 및 반도체 웨이퍼가 엔드 이펙터에 의해 지지될 때 반도체 웨이퍼의 대면 표면에 걸쳐 버퍼 가스를 흘리도록 구성된 버퍼 가스 분배기를 가진 장치가 제공될 수도 있다. 이러한 구현예들에서, 버퍼 가스 분배기는 로봇 암의 적어도 일부의 이동 동안 엔드 이펙터와 연계하여 (in tandem with) 이동하도록 구성될 수도 있고, 버퍼 가스 분배기 및 엔드 이펙터는, 엔드 이펙터 및 버퍼 가스 분배기가 반도체 웨이퍼들에 대해 수직인 축을 따라 배열된 반도체 웨이퍼들의 스택 내로 삽입 가능하도록 수직 축을 따라 이격될 수도 있고, 그리고 버퍼 가스 분배기 및 엔드 이펙터는 각각 반도체 웨이퍼들의 스택 내의 웨이퍼 사이의 갭들 내에 피팅되도록 (fit) 사이징될 수도 있다.
일부 부가적인 이러한 구현예들에서, 버퍼 가스 분배기는 엔드 이펙터에 대해 공간을 두고 고정될 수도 있고 그리고 로봇 암의 모든 이동 동안 엔드 이펙터와 연계하여 이동할 수도 있다.
일부 부가적인 또는 대안적인 이러한 구현예들에서, 반도체 웨이퍼들의 어레이는 FOUP (front-opening unified pod), 웨이퍼 스토커 (stocker), 웨이퍼 버퍼, 로드-록, 멀티-웨이퍼 카세트, 또는 나란한 멀티-웨이퍼 카세트와 같은 하나 이상의 장비의 피스들의 웨이퍼-지지 피처들에 의해 규정된 웨이퍼 사이의 어레이 공간을 가질 수도 있다. 일부 추가의 이러한 구현예들에서, 반도체 웨이퍼가 하나 이상의 장비의 피스들의 웨이퍼-지지 피처와 엔드 이펙터 양자에 의해 지지될 때 그리고 버퍼 가스 분배기를 반도체 웨이퍼에 대해 수직인 제 1 방향을 따라 볼 때, 반도체 웨이퍼와 오버랩하는 버퍼 가스 분배기의 부분은, 제 1 방향을 따라 볼 때 하나 이상의 장비의 피스들의 웨이퍼-지지 피처들과 오버랩하지 않는 형상을 가질 수도 있다. 일부 추가의 이러한 구현예들에서, 웨이퍼-지지 피처 각각은 엔드 이펙터를 향하는 갭을 가질 수도 있고, 그리고 버퍼 가스 분배기는 갭보다 작은 버퍼 가스 분배기의 장축에 대해 수직인 방향으로 폭을 가질 수도 있다.
장치의 일부 구현예들에서, 반도체 웨이퍼가 엔드 이펙터에 의해 지지될 때 반도체 웨이퍼와 오버랩하는 구역들에서, 버퍼 가스 분배기는 반도체 웨이퍼에 대해 직교하는 방향을 따라 9 ㎜ 이하의 두께일 수도 있고, 그리고 버퍼 가스 분배기는 엔드 이펙터를 향하는 하단 표면, 버퍼 가스 분배기의 하단 표면으로부터 반대 방향으로 향하는 상단 표면, 버퍼 가스 분배기의 상단 표면과 버퍼 가스 분배기의 하단 표면 사이를 걸치는 (span) 하나 이상의 측면 표면들, 버퍼 가스 분배기의 하단 표면 상에 배열된 하나 이상의 제 1 가스 분배 포트들, 버퍼 가스 분배기의 측면 표면들 상에 배열된 복수의 제 2 가스 분배 포트들, 및 버퍼 가스를 하나 이상의 제 1 가스 분배 포트들 및 복수의 제 2 가스 분배 포트들로 공급하도록 구성된 가스 분배 통로들을 포함할 수도 있다.
장치의 일부 구현예들에서, 버퍼 가스 분배기는, 반도체 웨이퍼가 엔드 이펙터에 의해 지지되고 그리고 버퍼 가스 분배기를 반도체 웨이퍼에 대해 수직인 제 1 방향을 따라 볼 때 모든 반도체 웨이퍼를 걸쳐 연장하지 않을 수도 있다.
장치의 일부 추가의 이러한 구현예들에서, 반도체 웨이퍼가 엔드 이펙터에 의해 지지되고 그리고 버퍼 가스 분배기를 반도체 웨이퍼에 대해 수직인 제 1 방향을 따라 볼 때, 버퍼 가스 분배기는, 로봇 암에 엔드 이펙터를 연결하는 (join) 기계적 인터페이스 및 반도체 웨이퍼의 중심 축을 통과하는 제 2 방향으로 반도체 웨이퍼의 직경의 적어도 90 %에 걸쳐 연장할 수도 있고, 그리고 제 1 방향 및 제 2 방향 양자에 대해 수직인 제 3 방향으로 반도체 웨이퍼에 걸쳐 단지 부분적으로 연장할 수도 있다.
장치의 일부 구현예들에서, 버퍼 가스 분배기의 적어도 최외측 절반은, 반도체 웨이퍼가 엔드 이펙터에 의해 지지될 때 그리고 반도체 웨이퍼에 대해 평행한 축을 따라 볼 때 반도체 웨이퍼와 오버랩하지 않도록 구성될 수도 있다.
장치의 일부 구현예들에서, 반도체 웨이퍼가 엔드 이펙터에 의해 지지될 때 반도체 웨이퍼 위로 연장하는 버퍼 가스 분배기의 부분은, 반도체 웨이퍼에 대해 평행한 축을 따라 볼 때 반도체 웨이퍼와 오버랩하지 않도록 구성될 수도 있다.
일부 구현예들에서, 장치는 인클로저, 수직 축을 따라 배열된 N 개의 웨이퍼 지지 구조체들을 가진 멀티-웨이퍼 저장 시스템을 지지하도록 구성된 인터페이스, 및 벽을 포함할 수도 있다. 웨이퍼 지지 구조체들은 직경 D의 반도체 웨이퍼들을 지지하도록 사이징될 수도 있고, N은 1 초과의 정수일 수도 있고, 그리고 반도체 웨이퍼 지지 구조체 각각은 어레이 내의 임의의 인접한 웨이퍼 지지 구조체 또는 웨이퍼 지지 구조체들로부터 평균 거리 d만큼 이격될 수도 있다. 벽은 D 초과의 폭 및 (N-1) d 미만의 높이를 가진 수평 슬롯을 포함할 수도 있고, 벽은 (2
d 미만의 높이를 가진 수평 슬롯을 포함할 수도 있고, 벽은 (2 N-1)
N-1) d 초과의 높이를 가질 수도 있고, 장치는 수직 축을 따라 수평 슬롯과 인터페이스 사이에서 상대적인 병진 운동을 제공하도록 구성될 수도 있고, 벽은, 멀티-웨이퍼 저장 시스템이 인터페이스에 의해 지지될 때, 반도체 웨이퍼들이 멀티-웨이퍼 저장 시스템 내로 로딩되거나 (loaded) 멀티-웨이퍼 저장 시스템으로부터 언로딩될 (unloaded) 수도 있는 멀티-웨이퍼 저장 시스템의 개구에 가까이 있도록 위치될 수도 있고, 그리고 반도체 웨이퍼들이 멀티-웨이퍼 저장 시스템 내로 로딩되거나 멀티-웨이퍼 저장 시스템으로부터 언로딩될 수도 있는 벽은, 멀티-웨이퍼 저장 시스템이 인터페이스에 의해 지지될 때 멀티-웨이퍼 저장 시스템의 내부 볼륨과 인클로저의 내부 볼륨 사이에 플로우 제한 배리어를 제공할 수도 있다.
d 초과의 높이를 가질 수도 있고, 장치는 수직 축을 따라 수평 슬롯과 인터페이스 사이에서 상대적인 병진 운동을 제공하도록 구성될 수도 있고, 벽은, 멀티-웨이퍼 저장 시스템이 인터페이스에 의해 지지될 때, 반도체 웨이퍼들이 멀티-웨이퍼 저장 시스템 내로 로딩되거나 (loaded) 멀티-웨이퍼 저장 시스템으로부터 언로딩될 (unloaded) 수도 있는 멀티-웨이퍼 저장 시스템의 개구에 가까이 있도록 위치될 수도 있고, 그리고 반도체 웨이퍼들이 멀티-웨이퍼 저장 시스템 내로 로딩되거나 멀티-웨이퍼 저장 시스템으로부터 언로딩될 수도 있는 벽은, 멀티-웨이퍼 저장 시스템이 인터페이스에 의해 지지될 때 멀티-웨이퍼 저장 시스템의 내부 볼륨과 인클로저의 내부 볼륨 사이에 플로우 제한 배리어를 제공할 수도 있다.
일부 이러한 구현예들에서, 장치는 제 1 버퍼 가스를 인클로저 내로 전달하도록 구성된 제 1 버퍼 가스 포트, 및 멀티-웨이퍼 저장 시스템이 인터페이스에 의해 지지될 때 제 2 버퍼 가스를 멀티-웨이퍼 저장 시스템 내로 전달하도록 구성된 제 2 버퍼 가스 포트를 더 포함할 수도 있다.
일부 부가적인 또는 대안적인 구현예들에서, 장치는 로봇 암, 로봇 암에 부착되고 그리고 로봇 암의 이동 동안 반도체 웨이퍼를 지지하도록 구성된 엔드 이펙터, 및 반도체 웨이퍼가 엔드 이펙터에 의해 지지될 때 반도체 웨이퍼의 대면 표면에 걸쳐 제 1 버퍼 가스를 흘리도록 구성된 버퍼 가스 분배기를 더 포함할 수도 있다. 이러한 구현예들에서, 버퍼 가스 분배기는 로봇 암의 적어도 일부의 이동 동안 엔드 이펙터와 연계하여 이동하도록 구성될 수도 있고, 버퍼 가스 분배기 및 엔드 이펙터는, 멀티-웨이퍼 저장 시스템이 장치 내에 설치되고 그리고 반도체 웨이퍼들이 멀티-웨이퍼 저장 시스템에 쌓일 (stock) 때 웨이퍼 지지 구조체들의 어레이에 의해 지지된 반도체 웨이퍼들의 어레이 내로 그리고 수평 슬롯을 통해 엔드 이펙터 및 버퍼 가스 분배기가 삽입 가능하도록 이격될 수도 있고, 그리고 버퍼 가스 분배기 및 엔드 이펙터는 각각 반도체 웨이퍼들의 어레이의 웨이퍼 사이의 갭들 내에 피팅되도록 사이징될 수도 있다.
일부 구현예들에서, 장치는 제 2 버퍼 가스를 인클로저 내로 전달하도록 구성된 제 1 버퍼 가스 포트, 및 멀티-웨이퍼 저장 시스템이 인터페이스에 의해 지지될 때 제 3 버퍼 가스를 멀티-웨이퍼 저장 시스템 내로 전달하도록 구성된 제 2 버퍼 가스 포트를 더 포함할 수도 있다.
일부 구현예들에서, 제 1 버퍼 가스, 제 2 버퍼 가스, 및 제 3 버퍼 가스 모두는 설비 질소 가스 소스를 통해 제공될 수도 있다.
일부 구현예들에서, 버퍼 가스 분배기는 엔드 이펙터에 대해 공간을 두고 고정될 수도 있고 그리고 로봇 암의 모든 이동 동안 엔드 이펙터와 연계하여 이동할 수도 있다.
일부 구현예들에서, 장치는 멀티-웨이퍼 저장 시스템을 더 포함할 수도 있고, 그리고 멀티-웨이퍼 저장 시스템은 인터페이스에 의해 지지될 수도 있다.
일부 구현예들에서, 멀티-웨이퍼 저장 시스템은 FOUP (front-opening unified pod), 웨이퍼 스토커, 웨이퍼 버퍼, 멀티-웨이퍼 카세트, 및 로드-록일 수도 있다.
일부 구현예들에서, 장치는 인클로저에 대해 수직 축을 따라 벽을 병진시키도록 구성된 구동 메커니즘을 더 포함할 수도 있고; 다른 또는 부가적인 이러한 구현예들에서, 구동 메커니즘은 인클로저에 대해 수직 축을 따라 인터페이스를 병진시키도록 또는 서로에 대해 이러한 방향으로 인터페이스 및 벽 양자를 병진시키도록 구성될 수도 있다.
일부 구현예들에서, 장치는 로봇 암, 및 로봇 암에 부착되고 그리고 로봇 암의 이동 동안 반도체 웨이퍼를 지지하도록 구성된 엔드 이펙터를 더 포함할 수도 있다. 이러한 구현예들에서, 수평 슬롯은 중간 부분의 반대편들 상에 위치된 수평 슬롯의 플랭킹 (flanking) 부분들의 수직 축을 따른 대응하는 제 2 치수들보다 큰 수직 축을 따른 제 1 치수를 갖는 중간 부분을 가질 수도 있고, 중간 부분은 로봇 암의 이동 동안 반도체 웨이퍼를 지지하도록 구성되는 엔드 이펙터의 부분의 폭보다 넓을 수도 있고, 엔드 이펙터는 반도체 웨이퍼가 엔드 이펙터에 의해 지지될 때 반도체 웨이퍼와 콘택트하도록 구성된 웨이퍼 콘택트 표면들을 가질 수도 있고, 엔드 이펙터는, 반도체 웨이퍼가 엔드 이펙터에 의해 지지되고 그리고 엔드 이펙터를 반도체 웨이퍼에 대해 수직인 방향을 따라 볼 때, 반도체 웨이퍼의 외측 주변부 내에 위치되고 그리고 웨이퍼 콘택트 표면들로부터 이격되어 마주보는 하나 이상의 제 1 하단 표면들을 가질 수도 있고, 제 1 치수는, 웨이퍼 콘택트 표면들과 엔드 이펙터의 하나 이상의 제 1 하단 표면들의 최하단 표면 사이의 수직 거리 더하기 제 2 치수 이상일 수도 있다.
일부 이러한 구현예들에서, 엔드 이펙터는 엔드 이펙터가 멀티-웨이퍼 저장 시스템 내로 반도체 웨이퍼를 배치하도록 사용될 때 수평 슬롯을 통과하고 그리고 하나 이상의 제 1 하단 표면들로부터 이격되어 마주보는 하나 이상의 제 1 상부 표면들을 가질 수도 있고, 그리고 제 1 치수는 엔드 이펙터의 하나 이상의 제 1 상부 표면들의 최상부 표면과 엔드 이펙터의 하나 이상의 제 1 하단 표면들의 최하단 표면 사이의 수직 거리 이상일 수도 있다.
장치의 일부 구현예들에서, 장치는 반도체 웨이퍼가 엔드 이펙터에 의해 지지될 때 반도체 웨이퍼의 대면 표면에 걸쳐 버퍼 가스를 흘리도록 구성된 버퍼 가스 분배기를 더 포함할 수도 있다. 버퍼 가스 분배기는 로봇 암의 적어도 일부의 이동 동안 엔드 이펙터와 연계하여 이동하도록 구성될 수도 있고, 버퍼 가스 분배기 및 엔드 이펙터는, 멀티-웨이퍼 저장 시스템이 장치 내에 설치되고 그리고 반도체 웨이퍼들이 멀티-웨이퍼 저장 시스템에 쌓일될 때 웨이퍼 지지 구조체들의 어레이에 의해 지지된 반도체 웨이퍼들의 어레이 내로 엔드 이펙터 및 버퍼 가스 분배기가 삽입 가능하도록 이격될 수도 있고, 버퍼 가스 분배기 및 엔드 이펙터는 각각 반도체 웨이퍼들의 어레이의 웨이퍼 사이의 갭들 내에 피팅되도록 사이징될 수도 있고, 버퍼 가스 분배기는, 엔드 이펙터가 멀티-웨이퍼 저장 시스템으로부터 반도체 웨이퍼를 제거하도록 사용될 때 수평 슬롯을 통과하고 그리고 하나 이상의 제 1 하단 표면들로부터 이격되어 마주보는 하나 이상의 제 1 상부 표면들을 가질 수도 있고, 그리고 제 1 치수는, 버퍼 가스 분배기의 하나 이상의 제 1 상부 표면들의 최상부 표면과 엔드 이펙터의 하나 이상의 제 1 하단 표면들의 최하단 표면 사이의 수직 거리 이상일 수도 있다.
일부 구현예들에서, 상이한 위치들에 위치된 복수의 웨이퍼 프로세싱 챔버들, 상이한 위치들에서 웨이퍼 프로세싱 챔버들을 지지하는 섀시, 하나 이상의 멀티-웨이퍼 카세트들로서, 멀티-웨이퍼 카세트 각각은 수직 축을 따라 배열된 N 개의 웨이퍼 지지 구조체들을 갖는, 하나 이상의 멀티-웨이퍼 카세트들, 로봇 암의 이동 동안 반도체 웨이퍼를 지지하도록 구성된 엔드 이펙터를 각각 가진 하나 이상의 로봇 암들, 및 하나의 버퍼 가스 마이크로클라이메이트 (microclimate) 시스템을 포함하는 장치가 제공될 수도 있다. 버퍼 가스 마이크로클라이메이트 시스템은 하나 이상의 멀티-웨이퍼 카세트들 각각의 부분일 수도 있는 적어도 하나의 슬롯 도어 메커니즘, 하나 이상의 엔드 이펙터들에 의해 지지된 반도체 웨이퍼들의 대면 표면들에 걸쳐 버퍼 가스를 흘리도록 구성된 하나 이상의 버퍼 가스 분배기들, 또는 하나 이상의 멀티-웨이퍼 카세트들 각각의 부분일 수도 있는 적어도 하나의 슬롯 도어 메커니즘, 및 하나 이상의 엔드 이펙터들에 의해 지지된 반도체 웨이퍼들의 대면 표면들에 걸쳐 버퍼 가스를 흘리도록 구성된 하나 이상의 버퍼 가스 분배기들 양자를 포함할 수도 있다. 이러한 구현예들에서, 하나 이상의 로봇 암들은 반도체 웨이퍼들을 하나 이상의 멀티-웨이퍼 카세트들로부터 그리고 하나 이상의 멀티-웨이퍼 카세트들로 복수의 웨이퍼 프로세싱 챔버들로 이송하도록 구성될 수도 있고, 웨이퍼 지지 구조체들은 직경 D의 반도체 웨이퍼들을 지지하도록 사이징될 수도 있고, N은 1 초과의 정수일 수도 있고, 그리고 반도체 웨이퍼 지지 구조체 각각은 어레이 내의 임의의 인접한 웨이퍼 지지 구조체 또는 웨이퍼 지지 구조체들로부터 평균 거리 d만큼 이격될 수도 있다.
장치의 일부 구현예들에서, 적어도 하나의 버퍼 가스 마이크로클라이메이트 시스템은 하나 이상의 멀티-웨이퍼 카세트들 각각의 부분일 수도 있는 적어도 하나의 슬롯 도어 메커니즘을 포함할 수도 있다. 이러한 구현예에서, 멀티-웨이퍼 카세트 각각은 웨이퍼들로 하여금 멀티-웨이퍼 카세트 내로 삽입되거나 멀티-웨이퍼 카세트로부터 철수되게 하도록 사이징된 정면 개구를 가질 수도 있고, 그리고 슬롯 도어 메커니즘 각각은, D 초과의 폭 및 (N-1) d 미만의 높이를 가진 수평 슬롯을 가진 도어를 가질 수도 있고, 그리고 기계적 입력에 응답하여, 멀티-웨이퍼 카세트의 웨이퍼 지지 구조체들에 대해 수직으로 도어를 병진시키도록 구성된 구동 메커니즘을 포함할 수도 있고, 슬롯 도어는 멀티-웨이퍼 카세트의 부분이다. 도어 각각은 (2
d 미만의 높이를 가진 수평 슬롯을 가진 도어를 가질 수도 있고, 그리고 기계적 입력에 응답하여, 멀티-웨이퍼 카세트의 웨이퍼 지지 구조체들에 대해 수직으로 도어를 병진시키도록 구성된 구동 메커니즘을 포함할 수도 있고, 슬롯 도어는 멀티-웨이퍼 카세트의 부분이다. 도어 각각은 (2 N-1)
N-1) d 초과의 높이를 가질 수도 있고 그리고 도어 각각은 멀티-웨이퍼 카세트의 정면 개구의 정면에 위치될 수도 있고 도어는 멀티-웨이퍼 카세트의 부분이다.
d 초과의 높이를 가질 수도 있고 그리고 도어 각각은 멀티-웨이퍼 카세트의 정면 개구의 정면에 위치될 수도 있고 도어는 멀티-웨이퍼 카세트의 부분이다.
일부 구현예들에서, 적어도 하나의 버퍼 가스 마이크로클라이메이트 시스템은 하나 이상의 엔드 이펙터들에 의해 지지된 반도체 웨이퍼들의 대면 표면들에 걸쳐 버퍼 가스를 흘리도록 구성된 하나 이상의 버퍼 가스 분배기들을 포함할 수도 있다. 이러한 구현예들에서, 하나 이상의 버퍼 가스 분배기들 각각은 하나 이상의 엔드 이펙터들 중 상이한 엔드 이펙터와 연관될 수도 있고, 버퍼 가스 분배기 각각은 로봇 암의 적어도 일부의 이동 동안 연관된 엔드 이펙터와 연계하여 이동하도록 구성될 수도 있고 연관된 엔드 이펙터는 로봇 암의 부분이고, 각각의 버퍼 가스 분배기 및 연관된 엔드 이펙터는, N 개의 반도체 웨이퍼들이 N 개의 웨이퍼 지지 구조체들에 의해 지지될 때 버퍼 가스 분배기 및 연관된 엔드 이펙터가 N 개의 웨이퍼 지지 구조체들에 의해 지지된 N 개의 반도체 웨이퍼들의 스택 내로 삽입 가능하도록 이격될 수도 있고, 그리고 각각의 버퍼 가스 분배기 및 연관된 엔드 이펙터는 각각 N 개의 반도체 웨이퍼들의 스택 내의 웨이퍼 사이의 갭들 내에 피팅되도록 사이징될 수도 있다.
하나 이상의 버퍼 가스 분배기들을 가진 장치의 일부 구현예들에서, 적어도 하나의 버퍼 가스 마이크로클라이메이트 시스템은 또한 하나 이상의 멀티-웨이퍼 카세트들 각각의 부분일 수도 있는 적어도 하나의 슬롯 도어 메커니즘을 포함할 수도 있다. 이러한 구현예들에서, 멀티-웨이퍼 카세트 각각은 웨이퍼들로 하여금 멀티-웨이퍼 카세트 내로 삽입되거나 멀티-웨이퍼 카세트로부터 철수되게 하도록 사이징된 정면 개구를 가질 수도 있고, 그리고 슬롯 도어 메커니즘 각각은, D 초과의 폭 및 (N-1) d 미만의 높이를 가진 수평 슬롯을 가진 도어, 및 기계적 입력에 응답하여, 멀티-웨이퍼 카세트의 웨이퍼 지지 구조체들에 대해 수직으로 도어를 병진시키도록 구성된 구동 메커니즘을 포함할 수도 있고 슬롯 도어는 멀티-웨이퍼 카세트의 부분이다. 도어 각각은 (2
d 미만의 높이를 가진 수평 슬롯을 가진 도어, 및 기계적 입력에 응답하여, 멀티-웨이퍼 카세트의 웨이퍼 지지 구조체들에 대해 수직으로 도어를 병진시키도록 구성된 구동 메커니즘을 포함할 수도 있고 슬롯 도어는 멀티-웨이퍼 카세트의 부분이다. 도어 각각은 (2 N-1)
N-1) d 초과의 높이를 가질 수도 있고 그리고 도어 각각은 멀티-웨이퍼 카세트의 정면 개구의 정면에 위치될 수도 있고 도어는 멀티-웨이퍼 카세트의 부분이다.
d 초과의 높이를 가질 수도 있고 그리고 도어 각각은 멀티-웨이퍼 카세트의 정면 개구의 정면에 위치될 수도 있고 도어는 멀티-웨이퍼 카세트의 부분이다.
장치의 일부 구현예들에서, 장치는 하나 이상의 멀티-웨이퍼 카세트들 중 적어도 하나를 수용하도록 그리고 수평 축을 따라 수평 위치들 사이에서 수용된 하나 이상의 멀티-웨이퍼 카세트들 중 적어도 하나를 병진시키도록 구성된 수평 웨이퍼 카세트 컨베이어를 더 포함할 수도 있다. 이러한 구현예에서, 웨이퍼 프로세싱 챔버들은 수평 웨이퍼 카세트 컨베이어의 양측 상에 이격된 위치들에 위치될 수도 있고, 그리고 하나 이상의 로봇 암들 중 제 1 로봇 암은, 제 1 멀티-웨이퍼 카세트가 적어도 수평 위치들 중 제 1 수평 위치에 위치될 때, 반도체 웨이퍼들을 하나 이상의 멀티-웨이퍼 카세트들 중 제 1 멀티-웨이퍼 카세트와 웨이퍼 프로세싱 챔버들 중 제 1 웨이퍼 프로세싱 챔버, 웨이퍼 프로세싱 챔버들 중 제 2 웨이퍼 프로세싱 챔버, 웨이퍼 프로세싱 챔버들 중 제 3 웨이퍼 프로세싱 챔버, 및 웨이퍼 프로세싱 챔버들 중 제 4 웨이퍼 프로세싱 챔버 사이로 수송하도록 구성될 수도 있다. 제 1 웨이퍼 프로세싱 챔버 및 제 2 웨이퍼 프로세싱 챔버는 수평 웨이퍼 카세트 컨베이어의 제 1 측면 상에 위치될 수도 있고, 제 3 웨이퍼 프로세싱 챔버 및 제 4 웨이퍼 프로세싱 챔버는 수평 웨이퍼 카세트 컨베이어의 제 2 측면 상에 위치될 수도 있고, 그리고 수평 웨이퍼 카세트 컨베이어의 제 1 측면은 수평 웨이퍼 카세트 컨베이어의 제 2 측면으로부터 수평 웨이퍼 카세트 컨베이어의 반대편의 측면 상에 있을 수도 있다.
장치의 일부 이러한 구현예들에서, 장치는 하나 이상의 수직 웨이퍼 카세트 컨베이어들을 더 포함할 수도 있다. 수직 웨이퍼 카세트 컨베이어 각각은 수평 위치들 중 상이한 수평 위치와 연관될 수도 있고, 그리고 하나 이상의 수직 웨이퍼 카세트 컨베이어들 중 제 1 수직 웨이퍼 카세트 컨베이어는 제 1 수평 위치와 연관될 수도 있다. 수직 웨이퍼 카세트 컨베이어 각각은 하나 이상의 기계적 인터페이스들을 포함할 수도 있고, 그리고 수직 웨이퍼 카세트 컨베이어 각각의 기계적 인터페이스 각각은, 기계적 인터페이스가 멀티-웨이퍼 카세트와 수직으로 정렬되고 그리고 멀티-웨이퍼 카세트가 수직 웨이퍼 카세트 컨베이어와 연관된 수평 위치에 위치되고 그리고 기준 수직 위치에 수평 웨이퍼 카세트 컨베이어에 의해 지지될 때, 하나 이상의 멀티-웨이퍼 카세트들 중 일 멀티-웨이퍼 카세트와 인터페이싱하도록 구성될 수도 있다. 수직 웨이퍼 카세트 컨베이어 각각은, 수직 웨이퍼 카세트 컨베이어에 포함된 하나 이상의 기계적 인터페이스들, 및 하나 이상의 기계적 인터페이스들이 인터페이싱되는 멀티-웨이퍼 카세트 각각을 수직 축을 따라 하나 이상의 수직 카세트 위치들로 병진시키도록 구성될 수도 있고, 수직 위치들은 기준 수직 위치의 높이 (elevation) 와 다른 높이들의 수직 위치들일 수도 있다. 이러한 구현예들에서, 제 1 로봇 암은, 제 1 멀티-웨이퍼 카세트가 제 1 수평 위치에 위치되고 그리고 또한 제 1 수직 웨이퍼 카세트 컨베이어에 의해 하나 이상의 수직 카세트 위치들 중 제 1 수직 카세트 위치에 위치될 때, 반도체 웨이퍼들을 제 1 멀티-웨이퍼 카세트와 제 1 웨이퍼 프로세싱 챔버, 제 2 웨이퍼 프로세싱 챔버, 제 3 웨이퍼 프로세싱 챔버, 및 제 4 웨이퍼 프로세싱 챔버 사이로 수송하도록 구성될 수도 있다.
일부 추가의 이러한 구현예들에서, 기계적 인터페이스 각각은 적어도 하나의 버퍼 가스 포트를 포함할 수도 있고, 그리고 멀티-웨이퍼 카세트 각각은 적어도 하나의 버퍼 가스 유입부를 포함할 수도 있다. 멀티-웨이퍼 카세트 각각의 적어도 하나의 버퍼 가스 유입부는, 멀티-웨이퍼 카세트가 기계적 인터페이스와 인터페이싱될 때 기계적 인터페이스 각각의 적어도 하나의 버퍼 가스 포트와 정렬될 수도 있어서, 버퍼 가스로 하여금 적어도 하나의 버퍼 가스 포트 및 적어도 하나의 버퍼 가스 유입부를 통해 멀티-웨이퍼 카세트의 내부 볼륨으로 도입되게 한다.
장치의 일부 구현예들에서, 하나 이상의 수직 웨이퍼 카세트 컨베이어들 중 제 2 수직 웨이퍼 카세트 컨베이어는 수평 위치들 중 제 2 수평 위치와 연관될 수도 있고, 제 1 로봇 암은 제 1 수평 위치와 제 2 수평 위치 사이에 개재될 수도 있고, 멀티-웨이퍼 카세트 각각은 또한 반도체 웨이퍼들로 하여금 멀티-웨이퍼 카세트 내로 삽입되거나 멀티-웨이퍼 카세트로부터 철수되게 하도록 또한 사이징되고 그리고 멀티-웨이퍼 카세트의 정면 개구에 반대편에 있는 후면 개구를 포함할 수도 있고, 하나 이상의 멀티-웨이퍼 카세트들 각각의 부분일 수도 있는 적어도 하나의 슬롯 도어 메커니즘은 - 멀티-웨이퍼 카세트 각각에 대해 - 제 2 슬롯 도어 메커니즘을 포함할 수도 있고, 제 2 슬롯 도어 메커니즘 각각의 도어는 멀티-웨이퍼 카세트의 후면 개구의 정면에 위치될 수도 있고, 제 2 슬롯 도어 메커니즘은 멀티-웨이퍼 카세트의 부분이고 제 2 멀티-웨이퍼 카세트는 하나 이상의 멀티-웨이퍼 카세트들 중 하나이고, 그리고 제 1 로봇 암은, 또한 제 2 멀티-웨이퍼 카세트가 제 2 수직 웨이퍼 카세트 컨베이어에 의해 제 1 수직 카세트 위치에 그리고 제 2 수평 위치에 위치될 때, 반도체 웨이퍼들을 제 2 멀티-웨이퍼 카세트와 제 1 웨이퍼 프로세싱 챔버, 제 2 웨이퍼 프로세싱 챔버, 제 3 웨이퍼 프로세싱 챔버, 및 제 4 웨이퍼 프로세싱 챔버 사이로 수송하도록 구성될 수도 있다.
장치의 일부 구현예들에서, 장치는 하나 이상의 수직 로봇 암 컨베이어들, 뿐만 아니라 웨이퍼 프로세싱 챔버들 중 제 5 웨이퍼 프로세싱 챔버, 웨이퍼 프로세싱 챔버들 중 제 6 웨이퍼 프로세싱 챔버, 웨이퍼 프로세싱 챔버들 중 제 7 웨이퍼 프로세싱 챔버, 및 웨이퍼 프로세싱 챔버들 중 제 8 웨이퍼 프로세싱 챔버를 더 포함할 수도 있다. 제 5 웨이퍼 프로세싱 챔버, 제 6 웨이퍼 프로세싱 챔버, 제 7 웨이퍼 프로세싱 챔버, 및 제 8 웨이퍼 프로세싱 챔버는, 제 1 웨이퍼 프로세싱 챔버, 제 2 웨이퍼 프로세싱 챔버, 제 3 웨이퍼 프로세싱 챔버, 및 제 4 웨이퍼 프로세싱 챔버 위에 위치될 수도 있고, 그리고 하나 이상의 수직 로봇 암 컨베이어들 각각은 이웃한 수직 웨이퍼 카세트 컨베이어들 사이에 개재될 수도 있다. 수직 로봇 암 컨베이어 각각은 하나 이상의 로봇 암들 중 대응하는 로봇 암을 수직 축을 따라 하나 이상의 수직 로봇 암 위치들로 병진시키도록 구성될 수도 있다. 하나 이상의 수직 로봇 암 위치들 중 제 1 수직 로봇 암 위치는 제 1 수직 카세트 위치와 연관될 수도 있고, 그리고 하나 이상의 수직 로봇 암 위치들 중 제 2 수직 로봇 암 위치는 제 1 수직 카세트 위치와 상이한 하나 이상의 수직 카세트 위치들 중 제 2 수직 카세트 위치와 연관될 수도 있다. 제 1 로봇 암은, 제 1 멀티-웨이퍼 카세트가 제 1 수평 위치 및 제 1 수직 카세트 위치에 위치되고 그리고 제 1 로봇 암이 제 1 수직 로봇 암 위치에 위치될 때, 반도체 웨이퍼들을 제 1 멀티-웨이퍼 카세트와 제 1 웨이퍼 프로세싱 챔버, 제 2 웨이퍼 프로세싱 챔버, 제 3 웨이퍼 프로세싱 챔버, 및 제 4 웨이퍼 프로세싱 챔버 사이로 수송하도록 구성될 수도 있고, 그리고 제 1 로봇 암은, 제 1 멀티-웨이퍼 카세트가 제 1 수평 위치 및 제 2 수직 카세트 위치에 위치되고 그리고 제 1 로봇 암이 제 2 수직 로봇 암 위치에 위치될 때, 반도체 웨이퍼들을 제 1 멀티-웨이퍼 카세트와 제 5 웨이퍼 프로세싱 챔버, 제 6 웨이퍼 프로세싱 챔버, 제 7 웨이퍼 프로세싱 챔버, 및 제 8 웨이퍼 프로세싱 챔버 사이로 수송하도록 더 구성될 수도 있다.
일부 추가의 이러한 구현예들에서, 장치는 웨이퍼 프로세싱 챔버들 중 제 9 웨이퍼 프로세싱 챔버, 웨이퍼 프로세싱 챔버들 중 제 10 웨이퍼 프로세싱 챔버, 웨이퍼 프로세싱 챔버들 중 제 11 웨이퍼 프로세싱 챔버, 웨이퍼 프로세싱 챔버들 중 제 12 웨이퍼 프로세싱 챔버, 웨이퍼 프로세싱 챔버들 중 제 13 웨이퍼 프로세싱 챔버, 웨이퍼 프로세싱 챔버들 중 제 14 웨이퍼 프로세싱 챔버, 웨이퍼 프로세싱 챔버들 중 제 15 웨이퍼 프로세싱 챔버, 및 웨이퍼 프로세싱 챔버들 중 제 16 웨이퍼 프로세싱 챔버를 포함할 수도 있다. 제 9 웨이퍼 프로세싱 챔버, 제 10 웨이퍼 프로세싱 챔버, 제 13 웨이퍼 프로세싱 챔버, 및 제 14 웨이퍼 프로세싱 챔버는 수평 웨이퍼 카세트 컨베이어의 제 1 측면 상에 위치될 수도 있고, 그리고 제 11 웨이퍼 프로세싱 챔버, 제 12 웨이퍼 프로세싱 챔버, 제 15 웨이퍼 프로세싱 챔버, 및 제 16 웨이퍼 프로세싱 챔버는 수평 웨이퍼 카세트 컨베이어의 제 2 측면 상에 위치될 수도 있다. 또한, 제 13 웨이퍼 프로세싱 챔버, 제 14 웨이퍼 프로세싱 챔버, 제 15 웨이퍼 프로세싱 챔버, 및 제 16 웨이퍼 프로세싱 챔버는 제 9 웨이퍼 프로세싱 챔버, 제 10 웨이퍼 프로세싱 챔버, 제 11 웨이퍼 프로세싱 챔버, 및 제 12 웨이퍼 프로세싱 챔버 위에 위치될 수도 있고, 그리고 제 2 수평 위치는 하나 이상의 로봇 암들 중 제 1 로봇 암과 제 2 로봇 암 사이에 개재될 수도 있다. 제 2 로봇 암은, 제 2 멀티-웨이퍼 카세트가 제 2 수평 위치 및 제 1 수직 카세트 위치에 위치되고 그리고 제 2 로봇 암이 제 1 수직 로봇 암 위치에 위치될 때, 반도체 웨이퍼들을 제 2 멀티-웨이퍼 카세트와 제 9 웨이퍼 프로세싱 챔버, 제 10 웨이퍼 프로세싱 챔버, 제 11 웨이퍼 프로세싱 챔버, 및 제 12 웨이퍼 프로세싱 챔버 사이로 수송하도록 구성될 수도 있고, 그리고 제 2 로봇 암은, 제 2 멀티-웨이퍼 카세트가 제 2 수평 위치 및 제 2 수직 카세트 위치에 위치되고 그리고 제 2 로봇 암이 제 2 수직 로봇 암 위치에 위치될 때, 반도체 웨이퍼들을 제 2 멀티-웨이퍼 카세트와 제 13 웨이퍼 프로세싱 챔버, 제 14 웨이퍼 프로세싱 챔버, 제 15 웨이퍼 프로세싱 챔버, 및 제 16 웨이퍼 프로세싱 챔버 사이로 수송하도록 더 구성될 수도 있다.
장치의 일부 추가의 이러한 구현예들에서, 적어도 하나의 버퍼 가스 마이크로클라이메이트 시스템은 하나 이상의 엔드 이펙터들에 의해 지지된 반도체 웨이퍼들의 대면 표면들에 걸쳐 버퍼 가스를 흘리도록 구성된 하나 이상의 버퍼 가스 분배기들을 포함할 수도 있다. 하나 이상의 버퍼 가스 분배기들 각각은 하나 이상의 엔드 이펙터들 중 상이한 엔드 이펙터와 연관될 수도 있고, 버퍼 가스 분배기 각각은 로봇 암의 적어도 일부의 이동 동안 연관된 엔드 이펙터와 연계하여 이동하도록 구성될 수도 있고 연관된 엔드 이펙터는 로봇 암의 부분이고, 각각의 버퍼 가스 분배기 및 연관된 엔드 이펙터는, N 개의 반도체 웨이퍼들이 N 개의 웨이퍼 지지 구조체들에 의해 지지될 때 버퍼 가스 분배기 및 연관된 엔드 이펙터가 N 개의 웨이퍼 지지 구조체들에 의해 지지된 N 개의 반도체 웨이퍼들의 스택 내로 삽입 가능하도록 이격될 수도 있고, 그리고 각각의 버퍼 가스 분배기 및 연관된 엔드 이펙터는 각각 N 개의 반도체 웨이퍼들의 스택 내의 웨이퍼 사이의 갭들 내에 피팅되도록 사이징될 수도 있다.
장치의 일부 구현예들에서, 장치는 또한 하나 이상의 멀티-웨이퍼 카세트들 중 적어도 하나를 수용하도록 그리고 수평 축을 따라 수평 위치들 사이에서 수용된 하나 이상의 멀티-웨이퍼 카세트들 중 적어도 하나를 병진시키도록 구성된 수평 웨이퍼 카세트 컨베이어를 포함할 수도 있다. 이러한 구현예들에서, 웨이퍼 프로세싱 챔버들은 수평 웨이퍼 카세트 컨베이어의 양측 상에 이격된 위치들에 위치될 수도 있고, 그리고 하나 이상의 로봇 암들 중 제 1 로봇 암은, 제 1 멀티-웨이퍼 카세트가 적어도 수평 위치들 중 제 1 수평 위치에 위치될 때, 반도체 웨이퍼들을 하나 이상의 멀티-웨이퍼 카세트들 중 제 1 멀티-웨이퍼 카세트와 웨이퍼 프로세싱 챔버들 중 제 1 웨이퍼 프로세싱 챔버, 웨이퍼 프로세싱 챔버들 중 제 2 웨이퍼 프로세싱 챔버, 웨이퍼 프로세싱 챔버들 중 제 3 웨이퍼 프로세싱 챔버, 및 웨이퍼 프로세싱 챔버들 중 제 4 웨이퍼 프로세싱 챔버 사이로 수송하도록 구성될 수도 있다. 이러한 구현예에서, 제 1 로봇 암은 하나 이상의 버퍼 가스 분배기들 중 제 1 버퍼 가스 분배기와 연관될 수도 있고, 제 1 웨이퍼 프로세싱 챔버 및 제 2 웨이퍼 프로세싱 챔버는 수평 웨이퍼 카세트 컨베이어의 제 1 측면 상에 위치될 수도 있고, 제 3 웨이퍼 프로세싱 챔버 및 제 4 웨이퍼 프로세싱 챔버는 수평 웨이퍼 카세트 컨베이어의 제 2 측면 상에 위치될 수도 있고, 그리고 수평 웨이퍼 카세트 컨베이어의 제 1 측면은 수평 웨이퍼 카세트 컨베이어의 제 2 측면으로부터 수평 웨이퍼 카세트 컨베이어의 반대편의 측면 상에 있을 수도 있다.
장치의 일부 이러한 구현예들에서, 장치는 하나 이상의 수직 웨이퍼 카세트 컨베이어들을 더 포함할 수도 있다. 수직 웨이퍼 카세트 컨베이어 각각은 수평 위치들 중 상이한 수평 위치와 연관될 수도 있고, 그리고 하나 이상의 수직 웨이퍼 카세트 컨베이어들 중 제 1 수직 웨이퍼 카세트 컨베이어는 제 1 수평 위치와 연관될 수도 있다. 수직 웨이퍼 카세트 컨베이어 각각은 하나 이상의 기계적 인터페이스들을 포함할 수도 있고, 기계적 인터페이스 각각은, 기계적 인터페이스가 멀티-웨이퍼 카세트와 수직으로 정렬되고 그리고 멀티-웨이퍼 카세트가 수직 웨이퍼 카세트 컨베이어와 연관된 수평 위치에 위치되고 그리고 기준 수직 위치에 수평 웨이퍼 카세트 컨베이어에 의해 지지될 때, 하나 이상의 멀티-웨이퍼 카세트들 중 일 멀티-웨이퍼 카세트와 인터페이싱하도록 구성될 수도 있다. 수직 웨이퍼 카세트 컨베이어 각각은, 수직 웨이퍼 카세트 컨베이어에 포함된 하나 이상의 기계적 인터페이스들, 및 하나 이상의 기계적 인터페이스들이 인터페이싱되는 멀티-웨이퍼 카세트 각각을 수직 축을 따라 하나 이상의 수직 카세트 위치들로 병진시키도록 구성될 수도 있다. 수직 카세트 위치들은 기준 수직 위치가 위치되는 높이와 상이한 높이들에 위치될 수도 있고, 그리고 제 1 로봇 암은, 제 1 멀티-웨이퍼 카세트가 제 1 수평 위치에 위치되고 그리고 또한 제 1 수직 웨이퍼 카세트 컨베이어에 의해 하나 이상의 수직 카세트 위치들 중 제 1 수직 카세트 위치에 위치될 때, 반도체 웨이퍼들을 제 1 멀티-웨이퍼 카세트와 제 1 웨이퍼 프로세싱 챔버, 제 2 웨이퍼 프로세싱 챔버, 제 3 웨이퍼 프로세싱 챔버, 및 제 4 웨이퍼 프로세싱 챔버 사이로 수송하도록 구성될 수도 있다.
일부 부가적인 이러한 구현예들에서, 기계적 인터페이스 각각은 적어도 하나의 버퍼 가스 포트를 포함할 수도 있고, 멀티-웨이퍼 카세트 각각은 적어도 하나의 버퍼 가스 유입부를 포함할 수도 있고, 그리고 멀티-웨이퍼 카세트 각각의 적어도 하나의 버퍼 가스 유입부는, 멀티-웨이퍼 카세트가 기계적 인터페이스와 인터페이싱될 때 기계적 인터페이스 각각의 적어도 하나의 버퍼 가스 포트와 정렬될 수도 있어서, 버퍼 가스로 하여금 적어도 하나의 버퍼 가스 포트 및 적어도 하나의 버퍼 가스 유입부를 통해 멀티-웨이퍼 카세트의 내부 볼륨으로 도입되게 한다.
장치의 일부 구현예들에서, 하나 이상의 수직 웨이퍼 카세트 컨베이어들 중 제 2 수직 웨이퍼 카세트 컨베이어는 수평 위치들 중 제 2 수평 위치와 연관되고, 제 1 로봇 암은 제 1 수평 위치와 제 2 수평 위치 사이에 개재될 수도 있고, 멀티-웨이퍼 카세트 각각은 또한 반도체 웨이퍼들로 하여금 멀티-웨이퍼 카세트 내로 삽입되거나 멀티-웨이퍼 카세트로부터 철수되게 하도록 또한 사이징되고 그리고 멀티-웨이퍼 카세트의 정면 개구에 반대편에 있는 후면 개구를 포함할 수도 있고, 제 2 멀티-웨이퍼 카세트는 하나 이상의 멀티-웨이퍼 카세트들 중 하나이고, 그리고 제 1 로봇 암은, 또한 제 2 멀티-웨이퍼 카세트가 제 2 수직 웨이퍼 카세트 컨베이어에 의해 제 1 수직 카세트 위치에 그리고 제 2 수평 위치에 위치될 때, 반도체 웨이퍼들을 제 2 멀티-웨이퍼 카세트와 제 1 웨이퍼 프로세싱 챔버, 제 2 웨이퍼 프로세싱 챔버, 제 3 웨이퍼 프로세싱 챔버, 및 제 4 웨이퍼 프로세싱 챔버 사이로 수송하도록 구성될 수도 있다.
일부 이러한 구현예들에서, 장치는 하나 이상의 수직 로봇 암 컨베이어들, 웨이퍼 프로세싱 챔버들 중 제 5 웨이퍼 프로세싱 챔버, 웨이퍼 프로세싱 챔버들 중 제 6 웨이퍼 프로세싱 챔버, 웨이퍼 프로세싱 챔버들 중 제 7 웨이퍼 프로세싱 챔버, 및 웨이퍼 프로세싱 챔버들 중 제 8 웨이퍼 프로세싱 챔버를 더 포함할 수도 있다. 제 5 웨이퍼 프로세싱 챔버, 제 6 웨이퍼 프로세싱 챔버, 제 7 웨이퍼 프로세싱 챔버, 및 제 8 웨이퍼 프로세싱 챔버는, 제 1 웨이퍼 프로세싱 챔버, 제 2 웨이퍼 프로세싱 챔버, 제 3 웨이퍼 프로세싱 챔버, 및 제 4 웨이퍼 프로세싱 챔버 위에 위치될 수도 있고, 그리고 하나 이상의 수직 로봇 암 컨베이어들 각각은 이웃한 수직 웨이퍼 카세트 컨베이어들 사이에 개재될 수도 있다. 수직 로봇 암 컨베이어 각각은 하나 이상의 로봇 암들 중 대응하는 로봇 암을 수직 축을 따라 하나 이상의 수직 로봇 암 위치들로 병진시키도록 구성될 수도 있다. 하나 이상의 수직 로봇 암 위치들 중 제 1 수직 로봇 암 위치는 제 1 수직 카세트 위치와 연관될 수도 있고, 그리고 하나 이상의 수직 로봇 암 위치들 중 제 2 수직 로봇 암 위치는 제 1 수직 카세트 위치와 상이한 하나 이상의 수직 카세트 위치들 중 제 2 수직 카세트 위치와 연관될 수도 있다. 제 1 로봇 암은, 제 1 멀티-웨이퍼 카세트가 제 1 수평 위치 및 제 1 수직 카세트 위치에 위치되고 그리고 제 1 로봇 암이 제 1 수직 로봇 암 위치에 위치될 때, 반도체 웨이퍼들을 제 1 멀티-웨이퍼 카세트와 제 1 웨이퍼 프로세싱 챔버, 제 2 웨이퍼 프로세싱 챔버, 제 3 웨이퍼 프로세싱 챔버, 및 제 4 웨이퍼 프로세싱 챔버 사이로 수송하도록 구성될 수도 있고, 그리고 제 1 로봇 암은, 제 1 멀티-웨이퍼 카세트가 제 1 수평 위치 및 제 2 수직 카세트 위치에 위치되고 그리고 제 1 로봇 암이 제 2 수직 로봇 암 위치에 위치될 때, 반도체 웨이퍼들을 제 1 멀티-웨이퍼 카세트와 제 5 웨이퍼 프로세싱 챔버, 제 6 웨이퍼 프로세싱 챔버, 제 7 웨이퍼 프로세싱 챔버, 및 제 8 웨이퍼 프로세싱 챔버 사이로 수송하도록 더 구성될 수도 있다.
일부 이러한 구현예들에서, 장치는 웨이퍼 프로세싱 챔버들 중 제 9 웨이퍼 프로세싱 챔버, 웨이퍼 프로세싱 챔버들 중 제 10 웨이퍼 프로세싱 챔버, 웨이퍼 프로세싱 챔버들 중 제 11 웨이퍼 프로세싱 챔버, 웨이퍼 프로세싱 챔버들 중 제 12 웨이퍼 프로세싱 챔버, 웨이퍼 프로세싱 챔버들 중 제 13 웨이퍼 프로세싱 챔버, 웨이퍼 프로세싱 챔버들 중 제 14 웨이퍼 프로세싱 챔버, 웨이퍼 프로세싱 챔버들 중 제 15 웨이퍼 프로세싱 챔버, 및 웨이퍼 프로세싱 챔버들 중 제 16 웨이퍼 프로세싱 챔버를 더 포함할 수도 있다. 제 9 웨이퍼 프로세싱 챔버, 제 10 웨이퍼 프로세싱 챔버, 제 13 웨이퍼 프로세싱 챔버, 및 제 14 웨이퍼 프로세싱 챔버는 수평 웨이퍼 카세트 컨베이어의 제 1 측면 상에 위치될 수도 있고, 그리고 제 11 웨이퍼 프로세싱 챔버, 제 12 웨이퍼 프로세싱 챔버, 제 15 웨이퍼 프로세싱 챔버, 및 제 16 웨이퍼 프로세싱 챔버는 수평 웨이퍼 카세트 컨베이어의 제 2 측면 상에 위치될 수도 있다. 또한, 제 13 웨이퍼 프로세싱 챔버, 제 14 웨이퍼 프로세싱 챔버, 제 15 웨이퍼 프로세싱 챔버, 및 제 16 웨이퍼 프로세싱 챔버는 제 9 웨이퍼 프로세싱 챔버, 제 10 웨이퍼 프로세싱 챔버, 제 11 웨이퍼 프로세싱 챔버, 및 제 12 웨이퍼 프로세싱 챔버 위에 위치될 수도 있다. 제 2 수평 위치는 하나 이상의 로봇 암들 중 제 1 로봇 암과 제 2 로봇 암 사이에 개재될 수도 있고, 제 2 로봇 암은, 제 2 멀티-웨이퍼 카세트가 제 2 수평 위치 및 제 1 수직 카세트 위치에 위치되고 그리고 제 2 로봇 암이 제 1 수직 로봇 암 위치에 위치될 때, 반도체 웨이퍼들을 제 2 멀티-웨이퍼 카세트와 제 9 웨이퍼 프로세싱 챔버, 제 10 웨이퍼 프로세싱 챔버, 제 11 웨이퍼 프로세싱 챔버, 및 제 12 웨이퍼 프로세싱 챔버 사이로 수송하도록 구성될 수도 있고, 그리고 제 2 로봇 암은, 제 2 멀티-웨이퍼 카세트가 제 2 수평 위치 및 제 2 수직 카세트 위치에 위치되고 그리고 제 2 로봇 암이 제 2 수직 로봇 암 위치에 위치될 때, 반도체 웨이퍼들을 제 2 멀티-웨이퍼 카세트와 제 13 웨이퍼 프로세싱 챔버, 제 14 웨이퍼 프로세싱 챔버, 제 15 웨이퍼 프로세싱 챔버, 및 제 16 웨이퍼 프로세싱 챔버 사이로 수송하도록 더 구성될 수도 있다.
일부 이러한 구현예들에서, 적어도 하나의 버퍼 가스 마이크로클라이메이트 시스템은 또한 하나 이상의 멀티-웨이퍼 카세트들 각각의 부분일 수도 있는 적어도 하나의 슬롯 도어 메커니즘을 포함할 수도 있다. 이러한 구현예들에서, 멀티-웨이퍼 카세트 각각은 웨이퍼들로 하여금 멀티-웨이퍼 카세트 내로 삽입되거나 멀티-웨이퍼 카세트로부터 철수되게 하도록 사이징된 정면 개구를 가질 수도 있고, 그리고 슬롯 도어 메커니즘 각각은, D 초과의 폭 및 (N-1) d 미만의 높이를 가진 수평 슬롯을 가진 도어, 및 기계적 입력에 응답하여, 멀티-웨이퍼 카세트의 웨이퍼 지지 구조체들에 대해 수직으로 도어를 병진시키도록 구성된 구동 메커니즘을 포함할 수도 있고 슬롯 도어는 멀티-웨이퍼 카세트의 부분이다. 도어 각각은 (2
d 미만의 높이를 가진 수평 슬롯을 가진 도어, 및 기계적 입력에 응답하여, 멀티-웨이퍼 카세트의 웨이퍼 지지 구조체들에 대해 수직으로 도어를 병진시키도록 구성된 구동 메커니즘을 포함할 수도 있고 슬롯 도어는 멀티-웨이퍼 카세트의 부분이다. 도어 각각은 (2 N-1)
N-1) d 초과의 높이를 가질 수도 있고; 그리고 도어 각각은 멀티-웨이퍼 카세트의 정면 개구의 정면에 위치될 수도 있고 도어는 멀티-웨이퍼 카세트의 부분이다.
d 초과의 높이를 가질 수도 있고; 그리고 도어 각각은 멀티-웨이퍼 카세트의 정면 개구의 정면에 위치될 수도 있고 도어는 멀티-웨이퍼 카세트의 부분이다.
일부 구현예들에서, 반도체 프로세싱 툴을 위한 EFEM (equipment front end module) 이 제공될 수도 있다. EFEM은 EFEM의 내부 볼륨을 적어도 부분적으로 규정하는 하나 이상의 벽들, EFEM의 내부 볼륨 내에서 웨이퍼들을 이동시키도록 구성된 웨이퍼 핸들링 로봇, 버퍼 가스 포트를 통해 EFEM의 내부 볼륨으로 공급된 버퍼 가스를 전달하도록 구성된 버퍼 가스 포트, 버퍼 가스 포트를 통한 버퍼 가스의 플로우를 조절하도록 구성된 버퍼 가스 제어 밸브, 및 제어기를 포함할 수도 있고, 제어기는 메모리 그리고 버퍼 가스 제어 밸브와 통신 가능하게 연결된 하나 이상의 프로세서들을 포함한 제어기를 포함한다. 메모리는 제어기로 하여금, 웨이퍼가 로봇에 의해 내부 볼륨 내에서 이동될 때를 결정하고, 적어도 부분적으로 웨이퍼가 로봇에 의해 EFEM의 내부 볼륨 내에서 이동된다는 결정에 응답하여, 버퍼 가스가 EFEM의 내부 볼륨 내로 흐르게 하도록 버퍼 가스 제어 밸브를 제 1 플로우 상태로 전이시키고, 웨이퍼가 로봇에 의해 EFEM의 내부 볼륨 내에서 이동되지 않을 때를 결정하고, 그리고 적어도 부분적으로 웨이퍼가 로봇에 의해 EFEM의 내부 볼륨 내에서 이동되지 않는다는 결정에 응답하여, 버퍼 가스 제어 밸브를 버퍼 가스의 플로우 레이트가 제 1 플로우 상태에서보다 낮은 제 2 플로우 상태로 전이시키게 하기 위한 컴퓨터-실행가능한 인스트럭션들을 포함할 수도 있다.
일부 이러한 구현예들에서, EFEM은 EFEM의 내부 볼륨을 통한 설비 공기의 플로우를 조절하도록 구성된 설비 공기 제어 밸브를 더 포함할 수도 있다. 설비 공기 제어 밸브는 제어기의 하나 이상의 프로세서들과 통신 가능하게 연결될 수도 있고, 그리고 메모리는 제어기로 하여금, 적어도 부분적으로 웨이퍼가 로봇에 의해 EFEM의 내부 볼륨 내에서 이동되지 않는다는 결정에 응답하여, 설비 공기가 EFEM의 내부 볼륨 내로 흐르게 하도록 설비 공기 제어 밸브를 제 3 플로우 상태로 전이시키고, 그리고 적어도 부분적으로 웨이퍼가 로봇에 의해 EFEM의 내부 볼륨 내에서 이동된다는 결정에 응답하여, 설비 공기 제어 밸브를 설비 공기의 플로우 레이트가 제 3 플로우 상태에서보다 낮은 제 4 플로우 상태로 전이시키게 하기 위한 컴퓨터-실행가능한 인스트럭션들을 더 포함할 수도 있다.
EFEM의 일부 구현예들에서, EFEM은, 웨이퍼들이 하나 이상의 FOUP들 (front-opening unified pods) 중 하나의 FOUP로부터 EFEM의 내부 볼륨 내로 또는 EFEM의 내부 볼륨으로부터 하나 이상의 FOUP들 중 하나의 FOUP로 이송될 수도 있도록, 하나 이상의 FOUP들과 인터페이싱하도록 구성된 하나 이상의 로딩 인터페이스들을 더 포함할 수도 있다. EFEM은 또한 웨이퍼들이 EFEM의 내부 볼륨으로부터 반도체 프로세싱 툴의 프로세싱 영역 내로 또는 반도체 프로세싱 툴의 프로세싱 영역으로부터 EFEM의 내부 볼륨 내로 이송될 수도 있는 하나 이상의 로드록들과 인터페이싱하도록 구성된 하나 이상의 로드록 인터페이스들을 포함할 수도 있다.
EFEM의 일부 구현예들에서, 로봇은 복수의 반도체 웨이퍼들을 동시에 지지하도록 구성되는 멀티-웨이퍼 엔드 이펙터를 포함할 수도 있다.
일부 구현예들에서, EFEM의 내부 볼륨을 적어도 부분적으로 규정하는 하나 이상의 벽들, EFEM의 내부 볼륨을 제 1 내부 서브-볼륨과 제 2 내부 서브-볼륨으로 분할하는 하나 이상의 분할 벽들, 버퍼 가스 포트를 통해 제 2 내부 서브-볼륨으로 공급된 버퍼 가스를 전달하도록 구성된 버퍼 가스 포트, 제 1 내부 서브-볼륨 내에서 웨이퍼들을 이동시키도록 구성된 제 1 웨이퍼 핸들링 로봇, 제 2 내부 서브-볼륨 내에서 웨이퍼들을 이동시키도록 구성된 제 2 웨이퍼 핸들링 로봇, 제 1 내부 서브-볼륨을 통해 설비 공기를 흘리도록 구성된 제 1 가스 핸들러, 및 제 2 내부 서브-볼륨을 통해 버퍼 가스를 흘리도록 구성된 제 2 가스 핸들러를 포함하는, 반도체 프로세싱 툴을 위한 EFEM (equipment front end module) 이 제공될 수도 있다.
일부 구현예들에서, 반도체 프로세싱 툴을 위한 웨이퍼 핸들링 로봇이 제공될 수도 있다. 웨이퍼 핸들링 로봇은, 로봇 암, 반도체 웨이퍼를 지지하도록 구성된 엔드 이펙터, 및 반도체 웨이퍼가 엔드 이펙터에 의해 지지될 때 반도체 웨이퍼의 상부 표면에 걸쳐 버퍼 가스를 흘리도록 구성된 버퍼 가스 분배기를 포함할 수도 있다. 엔드 이펙터는 로봇 암의 단부에 위치될 수도 있고, 버퍼 가스 분배기는 로봇 암에 의해 직접적으로 또는 간접적으로 지지될 수도 있고, 그리고 버퍼 가스 분배기는 로봇 암의 적어도 일부의 이동 동안 엔드 이펙터와 연계하여 이동하도록 구성될 수도 있다.
웨이퍼 핸들링 로봇의 일부 구현예들에서, 버퍼 가스 분배기는, 가스 분배 패들 (paddle), 및 지지 암을 포함할 수도 있다. 가스 분배 패들은 엔드 이펙터를 향하고, 그리고 엔드 이펙터로부터 오프셋된 제 1 표면을 가질 수도 있다. 제 1 표면은 버퍼 가스를 엔드 이펙터를 향하여 지향시키도록 구성된 하나 이상의 버퍼 가스 분배 포트들을 포함할 수도 있고, 그리고 지지 암은 가스 분배 패들을 지지할 수도 있고 그리고 로봇 암에 의해 지지될 수도 있다.
웨이퍼 핸들링 로봇의 일부 구현예들에서, 가스 분배 패들은 실질적으로 원형 형상을 가질 수도 있고 그리고 엔드 이펙터가 지지하도록 구성되는 반도체 웨이퍼의 직경의 ± 10 %보다 큰 외경을 가질 수도 있다.
웨이퍼 핸들링 로봇의 일부 이러한 구현예들에서, 웨이퍼 핸들링 로봇은 지지 암을 로봇 암과 연결하는 (join) 회전 피봇을 더 포함할 수도 있고, 그리고 회전 피봇은, 엔드 이펙터가 반도체 웨이퍼를 지지할 때 가스 분배 패들이 반도체 웨이퍼 위에 중심이 위치되는 제 1 위치로부터 엔드 이펙터가 반도체 웨이퍼를 지지할 때 가스 분배 패들이 반도체 웨이퍼 위에 중심이 위치되지 않는 제 2 위치로 가스 분배 패들을 회전시키도록 구성될 수도 있다.
일부 다른 또는 부가적인 이러한 구현예들에서, 웨이퍼 핸들링 로봇은 지지 암을 로봇 암과 연결하는 (join) 병진 메커니즘을 포함할 수도 있고, 그리고 병진 메커니즘은, 엔드 이펙터가 반도체 웨이퍼를 지지할 때 가스 분배 패들이 반도체 웨이퍼 위에 중심이 위치되는 제 1 위치로부터 엔드 이펙터가 반도체 웨이퍼를 지지할 때 가스 분배 패들이 반도체 웨이퍼 위에 중심이 위치되지 않는 제 2 위치로 가스 분배 패들을 병진시키도록 구성될 수도 있다.
웨이퍼 핸들링 로봇의 일부 구현예들에서, 가스 분배 패들은 가스 분배 패들의 하나 이상의 측면들 상에 하나 이상의 측면 버퍼 가스 분배 포트들을 포함할 수도 있고, 그리고 측면 버퍼 가스 분배 포트들은 엔드 이펙터에 의해 규정된 웨이퍼 지지면과 평행하게 ± 30° 내에서 하나 이상의 방향들로 버퍼 가스를 흘리도록 구성될 수도 있다.
일부 구현예들에서, 반도체 제작에서 사용되는 FOUP (front opening unified pod) 와 인터페이싱하기 위한 장치가 제공될 수도 있다. FOUP는 이동식 FOUP 도어 및 수직 스택으로 배열된 복수의 웨이퍼 지지 구조체들을 포함할 수도 있고, 웨이퍼 지지 구조체 각각은 직경 D의 반도체 웨이퍼를 지지하도록 구성된다. 장치는 FOUP를 수용하도록 구성된 플랫폼, D보다 큰 폭 및 웨이퍼 지지 구조체들의 수직 스택의 총 높이 미만의 높이를 가진 수평 슬롯을 포함한 도어, FOUP가 플랫폼 상에 위치된 후에 FOUP로부터 이동식 FOUP 도어를 제거하도록 구성된 FIM (front-opening interface mechanism), 및 수직 축을 따라 도어를 이동시키도록 구성된 구동 유닛을 포함할 수도 있다.
일부 이러한 구현예들에서, 수평 슬롯의 높이는 웨이퍼 지지 구조체들의 수직 스택의 총 높이의 50 % 미만일 수도 있다.
일부 구현예들에서, FOUP는 인접한 웨이퍼 지지 구조체들 사이에 평균 이격 거리를 가질 수도 있고 그리고 수평 슬롯의 높이는 평균 이격 거리의 300 % 미만일 수도 있다.
일부 구현예들에서, 장치는 FOUP가 플랫폼 상에 위치될 때 버퍼 가스를 FOUP 내로 흘리도록 구성된 버퍼 가스 공급 포트를 더 포함할 수도 있다.
일부 구현예들에서, 반도체 제작에서 사용되는 FOUP (front opening unified pod) 와 인터페이싱하기 위한 장치가 제공될 수도 있다. FOUP는 이동식 FOUP 도어 및 수직 스택으로 배열된 복수의 웨이퍼 지지 구조체들을 포함할 수도 있고, 웨이퍼 지지 구조체 각각은 직경 D의 반도체 웨이퍼를 지지하도록 구성된다. 장치는 FOUP를 수용하도록 구성된 플랫폼, 수직 축을 따라 플랫폼을 이동시키도록 구성된 수직 구동 메커니즘, D 초과의 폭 및 웨이퍼 지지 구조체들의 수직 스택의 총 높이 미만의 높이를 가진 수평 슬롯을 포함한 벽, 및 FOUP가 플랫폼 상에 위치된 후 그리고 플랫폼이 FIM (front-opening interface mechanism) 과 FOUP 도어를 정렬시키도록 수직으로 위치된 후에 FOUP로부터 이동식 FOUP 도어를 제거하도록 구성되는 FIM을 포함할 수도 있다.
일부 구현예들에서, 수평 슬롯의 높이는 웨이퍼 지지 구조체들의 수직 스택의 총 높이의 50 % 미만일 수도 있다.
일부 구현예들에서, FOUP는 인접한 웨이퍼 지지 구조체들 사이에 평균 이격 거리를 가질 수도 있고 그리고 수평 슬롯의 높이는 평균 이격 거리의 300 % 미만이다.
일부 구현예들에서, FOUP는 인접한 웨이퍼 지지 구조체들 사이에 평균 이격 거리를 가질 수도 있고 그리고 수평 슬롯의 높이는 평균 이격 거리의 300 % 미만이다.
일부 구현예들에서, 장치는 FOUP가 플랫폼 상에 위치될 때 버퍼 가스를 FOUP 내로 흘리도록 구성된 버퍼 가스 공급 포트를 더 포함할 수도 있다.
본 명세서에 개시된 다양한 구현예들은 첨부된 도면들에서 제한이 아닌 예로서 예시되고, 첨부된 도면들에서 동일한 마지막 2 자릿수들을 가진 참조 번호들은 상이한 구현예들에서 유사한 엘리먼트들을 지칭한다 (5 자릿수의 참조 번호들을 수반한 일부 예들에서, 5 자릿수의 참조 번호들의 마지막 3 자릿수들이 단지 마지막 2 자릿수들 대신에 동일할 수도 있음).
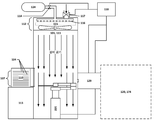
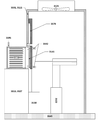
도 1은 설비 공기가 EFEM의 내부 볼륨을 통해 하측으로 흐르는 예시적인 EFEM을 도시한다.
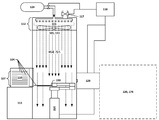
도 2 및 도 3은 도 1의 예시적인 EFEM의 측면도들을 도시한다.
도 4는 멀티-웨이퍼 엔드 이펙터를 가진 대안적인 예시적인 EFEM 설계를 도시한다.
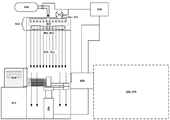
도 5는 EFEM이 설비 공기 분할부 및 버퍼 가스 EFEM 분할부를 가진 예시적인 분할된 EFEM을 도시한다.
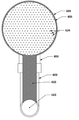
도 6 및 도 7은 예시적인 버퍼 가스 분배기의 평면도 및 측면도를 각각 도시한다.
도 8 내지 도 10은 동작의 다양한 페이즈들 동안 예시적인 회전 가능한 버퍼 가스 분배기의 평면도들을 도시한다.
도 11 내지 도 13은 동작의 다양한 페이즈들 동안 예시적인 병진 가능한 (translatable) 버퍼 가스 분배기의 평면도들을 도시한다.
도 14는 또 다른 예시적인 버퍼 가스 분배기의 평면도를 도시한다.
도 15는 도 14의 예시적인 버퍼 가스 분배기의 측면도를 도시한다.
도 16은 멀티-웨이퍼 저장 시스템 내로 삽입된 도 14의 버퍼 가스 분배기의 평면도를 도시한다.
도 17 내지 도 19는 웨이퍼 조작의 다양한 페이즈들 동안 2 개의 예시적인 웨이퍼 지지 피처들 및 웨이퍼들, 뿐만 아니라 예시적인 엔드 이펙터 및 예시적인 버퍼 가스 분배기의 상세한 부분적인 측면도들 (side section view) 을 도시한다.
도 20 내지 도 22는 웨이퍼 조작의 다양한 페이즈들 동안 도 17의 2 개의 예시적인 웨이퍼 지지 피처들 및 웨이퍼들, 뿐만 아니라 도 17의 예시적인 엔드 이펙터 및 상이한 예시적인 버퍼 가스 분배기의 상세한 부분적인 측면도들을 도시한다.
도 23은 예시적인 버퍼 가스 분배기의 또 다른 예의 평면도를 도시한다.
도 24는 도 23의 예시적인 버퍼 가스 분배기의 측면도를 도시한다.
도 25는 예시적인 버퍼 가스 분배기의 또 다른 예의 평면도를 도시한다.
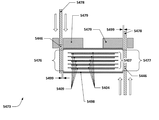
도 26 내지 도 30은 예시적인 버퍼 가스 분배기의 등축도, 절단된 (cutaway) 등축도, 상세한 절단된 등축도, 측면도, 및 상세한 측면도를 각각 도시한다.
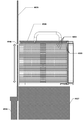
도 31 내지 도 35는 동작의 다양한 페이즈들 동안 수평 슬롯을 가진 예시적인 도어를 가진 예시적인 EFEM을 도시한다.
도 36 내지 도 40은 동작의 다양한 페이즈들 동안 수평 슬롯을 가진 예시적인 벽을 가진 예시적인 EFEM을 도시한다.
도 41은 버퍼 가스 분배기를 가진 로봇 암뿐만 아니라 수평 슬롯을 가진 도어를 포함하는 예시적인 EFEM을 도시한다.
도 42는 슬롯 도어가 없는 예시적인 로드 포트 유닛을 도시한다.
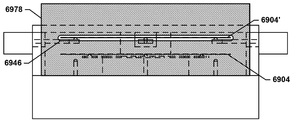
도 43은 슬롯 도어를 가진 예시적인 로드 포트 유닛을 도시한다.
도 44 및 도 45는 2 개의 대안적인 "폐쇄된" 위치들에서 슬롯 도어를 가진 도 43의 예시적인 로드 포트 유닛의 절단된 등축도들을 도시한다.
도 46 내지 도 48은 상이한 위치들에서 슬롯 도어을 가진 도 43의 예시적인 로드 포트 유닛의 추가의 절단된 도면들을 도시한다.
도 49 내지 도 52는 예시적인 버퍼 유닛 및 슬롯 도어의 등축도들을 도시한다.
도 53은 도 49의 예시적인 버퍼 유닛의 측면도를 도시한다.
도 54는 측면에서 본 예시적인 멀티-스테이션 세정 툴을 도시한다.
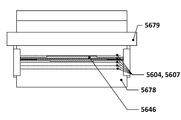
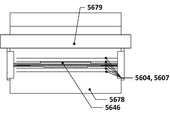
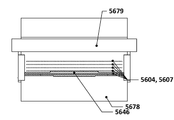
도 55는 예시적인 멀티-웨이퍼 카세트 또는 포드의 단면도를 도시한다.
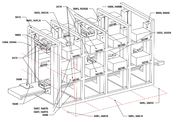
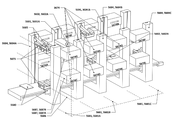
도 56은 예시적인 멀티-스테이션 반도체 프로세싱 툴의 등축도를 도시한다.
도 57은 도 56의 예시적인 멀티-스테이션 반도체 프로세싱 툴의 또 다른 등축도를 도시한다.
도 58은 도 56의 예시적인 멀티-스테이션 반도체 프로세싱 툴의 추가의 등축도를 도시한다.
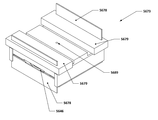
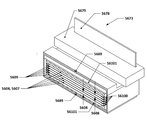
도 59 및 도 60은 도 56의 예시적인 멀티-스테이션 반도체 프로세싱 툴에서 사용될 수도 있는 예시적인 멀티-웨이퍼 카세트의 상단 등축도 및 하단 등축도를 도시한다.
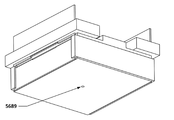
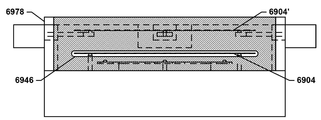
도 61 및 도 62는 도 59의 예시적인 멀티-웨이퍼 카세트의 상이한 절단된 도면들을 도시한다.
도 63 내지 도 68은 상이한 위치들에서 도어를 가진 도 59의 예시적인 멀티-웨이퍼 카세트의 정면도들을 도시한다.
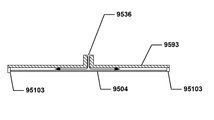
도 69는 슬롯 도어를 가진 예시적인 듀얼-웨이퍼 얼라이너의 등축 분해도를 도시한다.
도 70 내지 도 72은 상이한 위치들에서 슬롯 도어를 가진 도 69의 예시적인 듀얼-웨이퍼 얼라이너의 정면도들을 도시한다.
도 73은 슬롯 도어를 가진 예시적인 듀얼-웨이퍼 로드-록의 측면도를 도시한다.
도 74는 Bernoulli-타입의 엔드 이펙터의 예를 도시한다.
도면들에 도시된 구현예들은 대표적인 예시들로 의도되고, 그리고 개시된 개념들을 도시된 구조체들에만 제한하는 것으로서 보이지 않는다. 도시된 예들과 상이한 다른 구현예들이 또한 이 개시 및 첨부된 청구항들의 범위 내에 포함될 수도 있다는 것이 이해된다.
도 1은 설비 공기가 EFEM의 내부 볼륨을 통해 하측으로 흐르는 예시적인 EFEM을 도시한다.
도 2 및 도 3은 도 1의 예시적인 EFEM의 측면도들을 도시한다.
도 4는 멀티-웨이퍼 엔드 이펙터를 가진 대안적인 예시적인 EFEM 설계를 도시한다.
도 5는 EFEM이 설비 공기 분할부 및 버퍼 가스 EFEM 분할부를 가진 예시적인 분할된 EFEM을 도시한다.
도 6 및 도 7은 예시적인 버퍼 가스 분배기의 평면도 및 측면도를 각각 도시한다.
도 8 내지 도 10은 동작의 다양한 페이즈들 동안 예시적인 회전 가능한 버퍼 가스 분배기의 평면도들을 도시한다.
도 11 내지 도 13은 동작의 다양한 페이즈들 동안 예시적인 병진 가능한 (translatable) 버퍼 가스 분배기의 평면도들을 도시한다.
도 14는 또 다른 예시적인 버퍼 가스 분배기의 평면도를 도시한다.
도 15는 도 14의 예시적인 버퍼 가스 분배기의 측면도를 도시한다.
도 16은 멀티-웨이퍼 저장 시스템 내로 삽입된 도 14의 버퍼 가스 분배기의 평면도를 도시한다.
도 17 내지 도 19는 웨이퍼 조작의 다양한 페이즈들 동안 2 개의 예시적인 웨이퍼 지지 피처들 및 웨이퍼들, 뿐만 아니라 예시적인 엔드 이펙터 및 예시적인 버퍼 가스 분배기의 상세한 부분적인 측면도들 (side section view) 을 도시한다.
도 20 내지 도 22는 웨이퍼 조작의 다양한 페이즈들 동안 도 17의 2 개의 예시적인 웨이퍼 지지 피처들 및 웨이퍼들, 뿐만 아니라 도 17의 예시적인 엔드 이펙터 및 상이한 예시적인 버퍼 가스 분배기의 상세한 부분적인 측면도들을 도시한다.
도 23은 예시적인 버퍼 가스 분배기의 또 다른 예의 평면도를 도시한다.
도 24는 도 23의 예시적인 버퍼 가스 분배기의 측면도를 도시한다.
도 25는 예시적인 버퍼 가스 분배기의 또 다른 예의 평면도를 도시한다.
도 26 내지 도 30은 예시적인 버퍼 가스 분배기의 등축도, 절단된 (cutaway) 등축도, 상세한 절단된 등축도, 측면도, 및 상세한 측면도를 각각 도시한다.
도 31 내지 도 35는 동작의 다양한 페이즈들 동안 수평 슬롯을 가진 예시적인 도어를 가진 예시적인 EFEM을 도시한다.
도 36 내지 도 40은 동작의 다양한 페이즈들 동안 수평 슬롯을 가진 예시적인 벽을 가진 예시적인 EFEM을 도시한다.
도 41은 버퍼 가스 분배기를 가진 로봇 암뿐만 아니라 수평 슬롯을 가진 도어를 포함하는 예시적인 EFEM을 도시한다.
도 42는 슬롯 도어가 없는 예시적인 로드 포트 유닛을 도시한다.
도 43은 슬롯 도어를 가진 예시적인 로드 포트 유닛을 도시한다.
도 44 및 도 45는 2 개의 대안적인 "폐쇄된" 위치들에서 슬롯 도어를 가진 도 43의 예시적인 로드 포트 유닛의 절단된 등축도들을 도시한다.
도 46 내지 도 48은 상이한 위치들에서 슬롯 도어을 가진 도 43의 예시적인 로드 포트 유닛의 추가의 절단된 도면들을 도시한다.
도 49 내지 도 52는 예시적인 버퍼 유닛 및 슬롯 도어의 등축도들을 도시한다.
도 53은 도 49의 예시적인 버퍼 유닛의 측면도를 도시한다.
도 54는 측면에서 본 예시적인 멀티-스테이션 세정 툴을 도시한다.
도 55는 예시적인 멀티-웨이퍼 카세트 또는 포드의 단면도를 도시한다.
도 56은 예시적인 멀티-스테이션 반도체 프로세싱 툴의 등축도를 도시한다.
도 57은 도 56의 예시적인 멀티-스테이션 반도체 프로세싱 툴의 또 다른 등축도를 도시한다.
도 58은 도 56의 예시적인 멀티-스테이션 반도체 프로세싱 툴의 추가의 등축도를 도시한다.
도 59 및 도 60은 도 56의 예시적인 멀티-스테이션 반도체 프로세싱 툴에서 사용될 수도 있는 예시적인 멀티-웨이퍼 카세트의 상단 등축도 및 하단 등축도를 도시한다.
도 61 및 도 62는 도 59의 예시적인 멀티-웨이퍼 카세트의 상이한 절단된 도면들을 도시한다.
도 63 내지 도 68은 상이한 위치들에서 도어를 가진 도 59의 예시적인 멀티-웨이퍼 카세트의 정면도들을 도시한다.
도 69는 슬롯 도어를 가진 예시적인 듀얼-웨이퍼 얼라이너의 등축 분해도를 도시한다.
도 70 내지 도 72은 상이한 위치들에서 슬롯 도어를 가진 도 69의 예시적인 듀얼-웨이퍼 얼라이너의 정면도들을 도시한다.
도 73은 슬롯 도어를 가진 예시적인 듀얼-웨이퍼 로드-록의 측면도를 도시한다.
도 74는 Bernoulli-타입의 엔드 이펙터의 예를 도시한다.
도면들에 도시된 구현예들은 대표적인 예시들로 의도되고, 그리고 개시된 개념들을 도시된 구조체들에만 제한하는 것으로서 보이지 않는다. 도시된 예들과 상이한 다른 구현예들이 또한 이 개시 및 첨부된 청구항들의 범위 내에 포함될 수도 있다는 것이 이해된다.
"퍼지" 가스로 또한 지칭될 수도 있는 버퍼 가스를 사용하여 향상된 웨이퍼 보호를 제공하기 위한 다양한 기법들, 시스템들, 및 장치들이 본 명세서에서 논의된다. 버퍼 가스들은 반도체 웨이퍼들에 대해 대체로 또는 완전히 불활성/비반응성이고, 그리고 웨이퍼가 이러한 버퍼 가스에 의해 둘러싸일 때, 웨이퍼에 대한 손상을 방지하거나 완화시킬 수도 있다. 이하에 논의된 구현예들 각각에 대해, 이러한 버퍼 가스는 다양한 이러한 가스들 중 임의의 가스일 수도 있고 그리고 이러한 가스들의 설비 소스들, 예를 들어, 설비 질소 가스 소스에 의해 제공될 수도 있다는 것이 이해된다.
통상적인 반도체 프로세싱 설비에서, FOUP는 FOUP들을 위로 픽업하고, 반도체 프로세싱 툴에 이격되어 FOUP들을 리프팅하고, 또 다른 반도체 프로세싱 툴로 FOUP들을 이동시키고, 그리고 이어서 다른 반도체 프로세싱 툴로 하측으로 FOUP를 하강시키는 오버헤드 수송 시스템, 예를 들어, 오버헤드 트램웨이 (overhead tramway) 를 통해 반도체 프로세싱 툴로부터 반도체 프로세싱 툴로 수송될 수도 있다.
반도체 프로세싱 툴 각각은 FOUP들을 수용하기 위해 플랫폼들, 인터페이스들, 또는 스테이지들을 가질 수도 있는 로드 포트 유닛을 가질 수도 있다. 로드 포트 유닛들은 하나 이상의 웨이퍼 이송 로봇들을 포함하는 EFEM (equipment front end module) 과 인접할 수도 있고; EFEM은 또한 반도체 프로세싱 동작들을 수행하는 반도체 프로세싱 툴의 부분들에 대한 인터페이스로서 기능하는 하나 이상의 로드록들 또는 다른 인접한 구조체들을 포함할 수도 있다. EFEM들은 통상적으로 큰 내부 볼륨들을 갖고, 그리고 가스 핸들러들을 구비한다. 가스 핸들러는 통상적으로 설비 공기를 EFEM 내부 볼륨 내로 끌어당기고 (draw) 그리고 설비 공기를 EFEM 내부 볼륨을 통해 밀어내도록 구성된다. 이러한 가스 핸들러들은 통상적으로 수백 cfm (cubic feet per minute) 이상, 예를 들어, 1200 cfm의 공기 플로우들을 제공할 수도 있다. 설비 공기가 내부 볼륨에 도달하기 전에 예를 들어, ULPA (ultra-low particulate air) 필터에 의해 통상적으로 필터링되지만, 설비 공기는 프로세싱된 웨이퍼 상의 피처들에 부정적으로 영향을 줄 수도 있는 레벨들의 수분, 산소, 및/또는 다른 오염물질들을 여전히 가질 수도 있다. EFEM을 통해 이송되고 그리고 설비 공기에 노출되는 웨이퍼들은 이러한 트랜짓 (transit) 동안 이러한 오염물질들에 의해 손상될 수도 있다. 이것은 반도체 피처들의 사이즈의 축소 때문에 최근에서야 잘 알려진 이슈가 되었다; 웨이퍼들의 피처 사이즈가 이러한 손상이 웨이퍼 상에 형성된 회로들의 적절한 동작을 방해할 수 있는 최근에서야 충분히 작아졌기 때문에 이러한 노출에 의해 유발된 잠재적인 손상은 상당한 위험을 이전에 나타내지 않았다. 웨이퍼들은 EFEM의 환경 (context) 에서만이 아니라, 다른 환경들에서 설비 공기에 노출될 수도 있다.
본 발명자들 중 일부 또는 모두는 이러한 잠재적인 오염/손상이, 버퍼 가스가 EFEM 또는 다른 구조체를 트랜짓할 때 반도체 웨이퍼 주위에 버퍼 가스의 "마이크로클라이메이트"를 생성시킴으로써 방지되거나 완화될 수 있다는 것을 알아냈다. 이러한 마이크로클라이메이트들을 생성하고 관리하기 위한 몇몇의 잠재적인 기법들이 이하에 논의된다.
이하에 논의된 다양한 개념들이 단독으로 또는 다양한 치환들 및 조합들로 구현될 수도 있다는 것이 이해된다. 조합된 방법은 본 명세서에서 논의된 개념들 중 단일의 개념을 단독으로 사용하는 것보다 웨이퍼들을 오염으로부터 더 잘 보호할 수도 있다. 또한, 본 명세서에서 논의된 많은 개념들은 본 명세서에서 논의된 다른 개념들에 포함된 특징들과 유사한 특징들을 포함할 수도 있다. 이러한 예들에서, 상이한 실시예의 유사한 구조체들은 동일한 마지막의 2 자릿수들을 사용하여 도면들에서 지칭될 수도 있다. 달리 명시되지 않는 한, 일 실시예의 맥락에서 이러한 피처의 논의는, 다른 실시예들에서, 도면들에서 번호가 매겨진 피처의 동일한 마지막의 2 자릿수들의 사용에 의해 나타낸 바와 같이, 대응하는 피처에 일반적으로 동일하게 적용 가능하다.
EFEM
마이크로클라이메이트들
앞서 논의된 바와 같이, EFEM들은 웨이퍼 오염에 대해 특히 성가신 환경을 나타낸다. 이 위험을 완화시키기 위한 일부 전략들이 이하에 논의된다.
도 1에서, 설비 공기가 EFEM (111) 의 내부 볼륨을 통해 하측으로 흐르는 EFEM (111) 가 도시된다. FOUP들 (110) 을 수용하기 위한 3 개의 플랫폼들을 가진 로드 포트 유닛 (113) 이 EFEM (111) 과 연결될 수도 있다. 도 2는 도 1의 EFEM (111) 의 측면도를 도시한다. 보이는 바와 같이, 가스 핸들러 (112) 는 설비 버퍼 가스 공급부의 용량을 초과하는 버퍼 가스 플로우를 허용하도록 큰 볼륨의 버퍼 가스를 저장할 수도 있는 설비 가스 소스 또는 어큐뮬레이터 (accumulator) 일 수도 있는 버퍼 가스 공급부 (124) 와 연결된다. 버퍼 가스 공급부 (124) 는 버퍼 가스가 EFEM (111) 의 웨이퍼 트랜짓 영역을 통해 흐를 수도 있도록 가스 핸들러 (112) 내의 (또는 또 다른 위치 내의) 버퍼 가스를 분배시키도록 구성될 수도 있는 버퍼 가스 분배기 (116) 또는 분배 시스템에 연결될 수도 있다. 버퍼 가스 공급부 (124) 로부터의 버퍼 가스의 플로우는 결국 제어기 (118) 에 의해 제어될 수도 있는 버퍼 가스 제어 밸브 (114) 에 의해 제어될 수도 있다. 가스 핸들러 (112) 를 통한 설비 공기의 플로우는 또한 제어기 (118) 에 의해 제어되는 설비 공기 제어 밸브 (117) 에 의해 유사하게 제어될 수도 있다.
비-웨이퍼-이송 동작들 동안, 도 2에서와 같이, 제어기 (118) 는 버퍼 가스 제어 밸브 (114) 를 폐쇄되게 그리고 설비 공기 제어 밸브 (117) 를 개방되게 유지할 수 있어서, 설비 공기를 EFEM (111) 을 통해 흐르게 한다 (이것은 EFEM (111) 내의 정압을 유지하고, 그리고 미립자들 및 다른 오염물질들이 가스 핸들러 (112) 의 여과 시스템을 통하는 것을 제외하고 EFEM (111) 에 진입하는 것을 방지한다).
웨이퍼들이 도 3에서와 같이, EFEM (111) 의 내부 볼륨 내에 이송될 때 (최하단 웨이퍼는 이송 챔버 (120) 및/또는 하나 이상의 웨이퍼 프로세싱 챔버들 (174) 로 이어지는, 로드-록 (129) 으로 웨이퍼가 이송되게 하도록 로봇 암 (102) 의 엔드 이펙터 (193) 에 의해 FOUP (110) 내의 웨이퍼들 (104) 의 스택 (107) 으로부터 철수됨), 제어기 (118) 는 버퍼 가스가 가스 핸들러 (112) 내로 그리고 EFEM (111) 내부 볼륨 내로 흐르게 허용되도록 버퍼 가스 제어 밸브 (114) 를 제어할 수도 있다. 동시에, 제어기 (118) 는 설비 공기 제어 밸브 (117) (예를 들어, 설비 공기 차단 댐퍼 또는 다른 플로우 제어 디바이스일 수도 있음) 로 하여금 EFEM (111) 내부 볼륨을 통해 흐르는 설비 공기의 양을 제한하기 위해서 폐쇄되게 할 수도 있다. 그러므로, EFEM (111) 의 내부 볼륨 내의 대기는 웨이퍼들이 내부 볼륨을 트랜짓하지 않을 때의 시간들 동안의 설비 공기와 웨이퍼들이 내부 볼륨을 트랜짓할 때의 버퍼 가스 사이에서 스위칭될 수도 있다. 이러한 가스 플로우들은 디지털적일 수도 있고, 예를 들어, 버퍼 가스 플로우 또는 설비 공기 플로우는 완전히 온 (on) 이거나 완전히 오프 (off) 상태일 수도 있거나, 하나 또는 양자의 이러한 플로우들은 중간의 플로우 레벨들이 사용되도록 관리될 수도 있다는 것이 이해된다. 예를 들어, 버퍼 가스 전달 동안, 설비 공기 제어 밸브는 EFEM 환경이 버퍼 가스와 설비 공기의 블렌딩 (blend) 을 겪도록 감소된 레벨의 설비 공기를 흘리기 위해 설정될 수도 있다. 따라서, 사용된 제어 밸브들은 구현예에 따라, 차단 밸브들 또는 플로우 제어 밸브들일 수도 있다. 이러한 시스템들의 일부 구현예들에서, EFEM (111) 은 예를 들어, EFEM (111) 의 하단으로부터 EFEM (111) 의 상부 부분까지 가스를 수송하는 가스 복귀 통로를 가짐으로써, EFEM (111) 을 통해 흐르는 가스를 재순환시키도록 구성될 수도 있고, 여기서 재순환된 가스는 EFEM (111) 의 내부 볼륨 내로 재도입될 수도 있다. 일부 이러한 구현예들에서, 또는 대안적인 또는 부가적인 구현예들에서, EFEM (111) 은 설비 공기와 버퍼 가스 사이에서 왔다갔다 스위칭되지 않을 수도 있다. 예를 들어, 웨이퍼들이 처음에 FOUP의 EFEM으로 전달될 때, EFEM은 배기될 수도 있고 버퍼 가스로 대체될 수도 있는 설비 공기를 내부에 가질 수도 있다. 이 버퍼 가스는 이어서 FOUP가 도킹되는 (docked) 전체 시간에 연속적으로 사용될 수도 있다 (버퍼 가스는 재순환될 수도 있고 그리고 누출들 및 다른 탈출 경로들로 손실된 버퍼 가스를 대체하도록 주기적으로 보충될 수도 있거나 버퍼 가스는 단순히 연속적으로 흐를 수도 있음).
다양한 구현예들에서, 가스 핸들러 (112) 또는 팬 필터 유닛은 또한 가스 핸들러 (112) 를 통해 (가스 핸들러 (112) 의 응결을 통해) 흐르는 가스로부터 수분을 제거하도록 사용될 수도 있는 응결 장치 및 가열기 시스템 (115) 을 포함할 수도 있고; 가열기는 응결 프로세스가 가스 온도를 하강한 후에 이러한 가스의 온도를 상승시키도록 사용될 수도 있다.
일부 버퍼 가스들, 예컨대, N2는 a) 고가이고 그리고 b) 안전상의 위험이 있기 때문에 (예를 들어, 질소는 상당한 양들이 반도체 프로세싱 설비의 주변 환경 내로 도입된다면 질식 위험을 제기할 수 있고 - 이러한 경우는 1200 cfm가 밀봉하여 시일링되지 않은 반도체 프로세싱 툴들에 대해 수백 개의 EFEM들을 통해 흐른다면 발생할 수도 있음), 짧은 간격으로 버퍼 가스의 플로우를 단축시키는 것이 바람직할 수도 있다. 이러한 경우들에서, 멀티-웨이퍼 엔드 이펙터, 즉, 복수의 웨이퍼들을 동시에 지지하고 운반하도록 구성된 엔드 이펙터를 사용하는 것이 바람직할 수도 있다. 이 방식으로, 복수의 웨이퍼들은 버퍼 가스가 흐르는 동안, 도 4에 도시된 바와 같이, EFEM을 동시에 트랜짓할 수도 있고 - 이것은 엔드 이펙터들에 의해 수송되는 여분의 웨이퍼들에 대해 부가적인 간격들 동안 버퍼 가스를 흘리는 것을 회피한다. 예를 들어, 도 4에서, 로봇 암 (402) 은 5 개의 반도체 웨이퍼들 (104) 을 동시에 리프팅하고 수송할 수 있는 5-웨이퍼 엔드 이펙터 (493) 를 구비한다. 도 4에 도시된 다른 시스템들은 도 1의 대응하는 시스템들과 유사한 방식으로 동작한다.
버퍼 가스 마이크로클라이메이트 생성을 위한 또 다른 잠재적인 기법은 EFEM의 내부 볼륨을 2 개의 서브-볼륨들: 제 1 내부 서브-볼륨과 제 2 내부 서브-볼륨으로 분리하는 내부 배리어 또는 분할 벽을 가진 EFEM을 사용하는 것이다. 제 1 내부 서브-볼륨은 제 1 내부 서브-볼륨을 통해 순환되는 설비 공기를 가질 수도 있고, 반면에 제 2 내부 서브-볼륨은 제 2 내부 서브-볼륨을 통해 순환되는 버퍼 가스를 가질 수도 있다. 이들 타입들의 구현예들에서, 서브-볼륨 각각은 자체 웨이퍼 핸들링 로봇을 가질 수도 있다. 도 5는 이러한 구현예를 도시한다. 도 5에서, 인클로저 (501) 는 설비-공기 EFEM (511) 및 버퍼 가스 EFEM (511') 을 갖는다. EFEM (511 및 511') 각각은 반도체 웨이퍼들을 로드 포트 유닛 (513) 상의 FOUP들 (510) 로부터 그 각각의 EFEM들 (511 및 511') 내외로 수송하도록 사용될 수도 있는 대응하는 로봇 암 (502 및 502') 을 각각 가질 수도 있다. 설비-공기 EFEM (511) 는 설비 공기 핸들러 (521) 를 구비할 수도 있고, 그리고 버퍼 가스 EFEM (511') 는 버퍼 가스 환경을 컨디셔닝하도록 응결 장치/가열기 유닛 (515) 을 선택 가능하게 포함할 수도 있는 버퍼 가스 핸들러 (512) 를 구비할 수도 있다.
웨이퍼 이송 로봇 마이크로클라이메이트들
상기 기법들 및 시스템들이 EFEM 내의 버퍼 가스 환경의 생성 및 유지를 용이하게 하는 반면에, 본 발명자들의 일부 또는 모두는 또한 웨이퍼가 EFEM의 내부 볼륨을 트랜짓할 때 반도체 웨이퍼 바로 부근에 훨씬 보다 국부화된 버퍼 가스 마이크로클라이메이트를 생성하도록 사용될 수도 있는 대안적인 또는 추가적인 기법들을 생각하였다. 이러한 기법들은 앞서 논의된 EFEM과 같은 버퍼 가스 구비된 EFEM의 맥락에서 사용될 수도 있거나, 보통의 설비-공기 EFEM 유닛들에서 사용될 수도 있다.
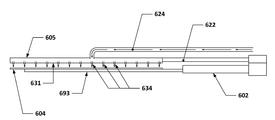
이러한 기법들에서, 웨이퍼 핸들링 로봇은 웨이퍼 바로 위에 버퍼 가스를 분배하도록 구성되는 버퍼 가스 분배기를 구비할 수도 있다. 일부 이러한 구현예들에서, 도 6 및 도 7에 도시된 것과 같이, 버퍼 가스 분배기 (605) 는 실질적으로 원형일 수도 있고 대체로 웨이퍼 (604) 와 동일한 사이즈일 수도 있다. 버퍼 가스 분배기 (605) 는 버퍼 가스 분배기 (605) 와 대면 표면, 즉, 웨이퍼 (604) 가 로봇 암 (602) 의 엔드 이펙터 (693) 에 의해 지지될 때 웨이퍼 (604) 의, 버퍼 가스 분배기를 향하는 표면 사이에 갭이 있도록 웨이퍼 (604) 로부터 오프셋될 수도 있고; 이 갭은 약 수 ㎜, 예를 들어, 1 ㎝ 이하일 수도 있다. 하나 이상의 버퍼 가스 분배 포트들 (634) 은 웨이퍼 (604) 가 엔드 이펙터 (693) 에 의해 지지될 때 웨이퍼 (604) 를 향하는 버퍼 가스 분배기 (605) 의 제 1 표면, 예를 들어, 하단 표면 (631) 에 위치될 수도 있고; 버퍼 가스가 버퍼 가스 분배기 (605) 를 통해 그리고 버퍼 가스 분배 포트들 (634) 의 외부로 흐를 때, 버퍼 가스는 웨이퍼 (604) 에 걸쳐 흐를 수도 있고 그리고 가스성, 보호 층으로서 기능할 수도 있다. 부가적으로, 버퍼 가스 분배기 (605) 는 또한 웨이퍼 (604) 를 향하는 설비 공기의 플로우를 방해하는 물리적 배리어로서 기능할 수도 있다. 따라서, 버퍼 가스 분배기 (605) 가 웨이퍼 (604) 위에 중심이 위치되고 버퍼 가스가 웨이퍼를 통해 흐를 때, 웨이퍼 (604) 는 버퍼 가스 분배기 (605) 자체뿐만 아니라 버퍼 가스 분배기 (605) 로부터 흐르는 버퍼 가스 양자에 의해 설비 공기 플로우로부터 보호될 수도 있다. 도 7에 도시된 바와 같이, 버퍼 가스는 이 예에서 설비 버퍼 가스 공급부 (미도시) 에 연결되는 튜브인 버퍼 가스 공급부 (624) 를 통해 버퍼 가스 분배기 (605) 에 공급될 수도 있다. 본 명세서에서 논의된 버퍼 가스 분배기들의 일부와 같은 버퍼 가스 분배기들의 다른 구현예들에서, 버퍼 가스는 도 7에 도시된 바와 같이, 버퍼 가스 분배기 외부의 별개의 통로 대신에 버퍼 가스 분배기의 바디 내에 위치되는 통로들 또는 플레넘들을 통해 버퍼 가스 분배 포트들에 공급될 수도 있다는 것이 이해된다.
일부 이러한 구현예들에서, 도 6 내지 도 10에 도시된 구현예와 같이, 버퍼 가스 분배기는 버퍼 가스 분배기 (605) 로 하여금 웨이퍼 (604) 와 평행한 면에서 웨이퍼 (604) 에 이격되어 스윙하게 (swing) 하는 지지 암 회전 피봇 (623) 에 부착되는 지지 암 (622) 상에 지지될 수도 있다. FOUP들이 웨이퍼들을 지지할 수도 있으므로, FOUP들은 웨이퍼의 에지들을 따라, 웨이퍼 (604) 가 이러한 웨이퍼 지지부들을 방해할 수도 있기 때문에 일반적으로 동일한 사이즈인 버퍼 가스 분배기 (605) 를 포함한다. 지지 암 회전 피봇 (623) 은 버퍼 가스 분배기로 하여금 로봇 암이 FOUP 내로 연장할 때 측면으로 피봇되게 할 수도 있고, 이에 따라 버퍼 가스 분배기로 하여금 FOUP 내의 웨이퍼 지지부들을 방해하지 않게 한다. 버퍼 가스 분배기는 EFEM 내에서 설비 공기 플로우로부터 웨이퍼를 실드하도록 (shield) 가능한 한 웨이퍼 위에 유지될 수도 있다. 따라서, 버퍼 가스 분배기는 웨이퍼가 EFEM에 이미 부분적으로 남겨질 때, 예를 들어, 웨이퍼가 10 ㎝ 또는 보다 깊을 수도 있는 (도 10 참조) FOUP 연결 통로 (vestibule) 내에 있을 때 웨이퍼에서 이격되어 회전될 수도 있다.
도 8 내지 도 10은 FOUP (610) 로의 웨이퍼 전달의 다양한 스테이지들 동안 버퍼 가스 분배기 (605), 웨이퍼 (604), 및 로봇 암 (602) 의 부감도들을 도시한다. FOUP (610) 는 EFEM (미도시) 의 외부에 위치되고; 로봇 암 (602) 은 EFEM의 내부에 위치된다. FOUP 연결 통로 (625) 는 EFEM 벽들의 내부 표면들로부터 FOUP (610) 를 분리시킬 수도 있다.
도 8에서, 로봇 암 (602), 버퍼 가스 분배기 (605), 웨이퍼 (604), 및 엔드 이펙터 (693) 는 모두 웨이퍼 (604) 로 하여금 FOUP (610) 로 다가가게 하도록 방향 1로 함께 이동될 수도 있다. 이러한 이동 동안, 버퍼 가스 분배기는 웨이퍼 (604) 에 걸쳐 버퍼 가스를 분배할 수도 있고, 이에 따라 웨이퍼를 EFEM 내에서 주변 환경에 대한 노출로부터 적어도 부분적으로 실드한다.
도 9에서, 버퍼 가스 분배기 (605) 에 부착되는 지지 암 (622) 은 버퍼 가스 분배기가 FOUP 연결 통로 (625) 를 통과할 수도 있도록 시계 방향 2로 스윙하기 위해서 (다른 구현예들, 지지 암은 반시계 방향으로 스윙할 수도 있음) 회전 피봇 (623) 을 중심으로 회전할 수도 있는 동안, 로봇 암 (602), 웨이퍼 (604), 및 엔드 이펙터 (693) 가 방향 1을 따라 이동을 계속할 수도 있다.
도 10에서, 엔드 이펙터 (693), 로봇 암 (602), 및 웨이퍼 (604) 가 방향 4를 따라 계속 병진하는 동안, 지지 암 (622) 는 시계 방향 3으로 회전 피봇 (623) 을 중심으로 계속 스윙한다. 보이는 바와 같이, 웨이퍼 (604) 가 FOUP (610) 내에 완전히 있을 때까지 지지 암 (622) 및 버퍼 가스 분배기 (605) 가 계속 회전하는 동안, 웨이퍼 (604) 는 거의 완전히 FOUP (610) 내에 있고, 그리고 로봇 암 (602), 엔드 이펙터 (693), 및 웨이퍼 (604) 는 FOUP (610) 내로 계속 연장할 수도 있다.
도 11은 지지 암 (1122) 으로 하여금 로봇 암 (1102) 에 대해 병진되게 하는, 병진 메커니즘 (1126), 예를 들어, 선형 구동부, 볼 스크류, 또는 다른 선형 병진 메커니즘을 사용하여 지지 암 (1122) 이 로봇 암 (1102) 과 연결될 수도 있는 또 다른 유사한 구현예를 도시한다. 이러한 구현예에서, 엔드 이펙터 (1193) 가 FOUP (1110) 내로 삽입될 때, 버퍼 가스 분배기 (1105) 는 동일한 레이트로 FOUP (1110) 에서 이격되어 병진될 수도 있고, 따라서 버퍼 가스 분배기가 FOUP 내로 연장하는 정도를 제한한다. 따라서, 일부 구현예들에서, 버퍼 가스 분배기는 엔드 이펙터의 적어도 일부의 이동 동안 엔드 이펙터에 대해 고정될 수도 있고, 예를 들어, 버퍼 가스 분배기는 엔드 이펙터가 EFEM 내에서 웨이퍼를 이동시킬 때 엔드 이펙터에 대해 고정될 수도 있고 그리고 웨이퍼가 엔드 이펙터와 연계하여 이동할 때 다른 컴포넌트들 (components) 과 버퍼 가스 분배기가 충돌할 위험은 없다.
도 12 및 도 13은 로봇 암 (1102), 엔드 이펙터 (1193), 및 버퍼 가스 분배기 (1105) 가 FOUP (1110) 를 향하여 방향 1을 따라 연장될 때 이러한 구현예를 도시한다. 도 13에서, 지지 암 (1122) 및 버퍼 가스 분배기 (1105) 가 병진 메커니즘 (1126) 에 의해 반대 방향, 즉, 방향 2로 병진되는 동안, 엔드 이펙터 (1193) (도면에서 보이지 않음), 웨이퍼 (1104), 병진 메커니즘 (1126), 및 로봇 암 (1102) 은 방향 1을 따라 FOUP (1110) 내로 계속 연장한다. 이것은 웨이퍼 (1104) 가 FOUP (1110) 내에 배치되는 동안 버퍼 가스 분배기 (1105) 로 하여금 FOUP 연결 통로 (1125) 내에서 "대기"하게 한다. 웨이퍼 (1104) 가 FOUP (1110) 로부터 철수되는 상황들에서, 버퍼 가스 분배기 (1105) 및 지지 암 (1122) 은 동일한 방식으로 동작될 수도 있고, 그리고 이어서 엔드 이펙터 (1193), 웨이퍼 (1104), 및 로봇 암 (1102) 이 FOUP (1110) 로부터 웨이퍼 (1104) 를 철수하도록 방향 2로 병진될 때 방향 1로 병진될 수도 있다.
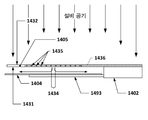
버퍼 가스 분배기의 또 다른 잠재적인 구현예가 도 14 및 도 15에 도시된다. 이 구현예에서, 버퍼 가스 분배기 (1405) 는 엔드 이펙터의 장축에 대해 일반적으로 횡단하는 방향들로 웨이퍼 (1404) 에 걸쳐 내내 연장하지 않는 패들 형상을 형성한다. 이 시나리오에서, 버퍼 가스 분배기 (1405) 에 의해 실드되지 않는 웨이퍼 (1404) 의 익현 (chord) 형상의 구역들이 적어도 있을 수도 있다. 일부 부가적인 이러한 구현예들에서, 도시된 구현예와 같이, 버퍼 가스 분배기 (1405) 는 엔드 이펙터의 장축과 평행한 방향으로 웨이퍼 (1404) 에 걸쳐 완전히 연장하지 않을 수도 있다 (명료성을 위해, 본 명세서에서 사용된 바와 같이, 엔드 이펙터의 "장축"은 엔드 이펙터에 의해 지지되는 웨이퍼의 중심을 통과하고 또한 기계적 인터페이스가 로봇 암에 엔드 이펙터를 부착하는 곳을 통과하는 축이다). 예를 들어, 버퍼 가스 분배기 (1405) 는 버퍼 가스 분배기 (1405) 가 이러한 방향을 따라 있을 수도 있는 웨이퍼 지지 피처들과 오버랩하지 않도록, 이러한 방향으로 웨이퍼 (1404) 의 직경의 대부분, 예를 들어, 90 % 이상에 걸쳐 연장할 수도 있다. 버퍼 가스 분배기 (1405) 는 웨이퍼를 향하는 하나 이상의 개구들 또는 버퍼 가스 분배 포트들 (제 1 가스 분배 포트들) (1434), 뿐만 아니라 웨이퍼의 노출된 영역들에 걸쳐 버퍼 가스를 흘릴 수도 있는 하나 이상의 측면 버퍼 가스 분배 포트들 (제 2 가스 분배 포트들) (1435) 을 가질 수도 있다. 하나 이상의 제 1 가스 분배 포트들 (1434) 은 엔드 이펙터 (1493) 와 마주보는 버퍼 가스 분배기 (1405) 의 하단 표면 (1431) 에 위치될 수도 있고 그리고 웨이퍼 (1404) 상으로 하측으로 버퍼 가스를 흘릴 수도 있고; 이어서 이 버퍼 가스는 웨이퍼 (1404) 및/또는 버퍼 가스 분배기 (1405) 의 주변을 향하여 방사상으로 외측으로 흐를 수도 있다. 하나의 제 1 가스 분배 포트 (1434) 만이 이 예에서 도시되지만, 원한다면, 하단 표면 (1431) 의 구역 또는 구역들에 걸쳐 분포된 복수의 이러한 제 1 가스 분배 포트들이 있을 수도 있다는 것이 이해된다. 제 2 가스 분배 포트들 (1435) 은 버퍼 가스 분배기의 하단 표면 (1431) 과 상단 표면 (1432) 사이에 걸치는 버퍼 가스 분배기의 측면 표면들에 위치될 수도 있고 그리고 외측으로 대체로 수평 방향으로, 즉, 대체로 웨이퍼 (1404) 의 주요 면과 평행하게 버퍼 가스를 흘리도록 구성될 수도 있다. 이것은 버퍼 가스 분배기 (1405) 에 의해 오버랩되지 않은 웨이퍼 (1404) 의 부분들을 보호하게 도울 수도 있는 버퍼 가스의 박층 또는 커튼 (curtain) 을 생성하는 효과를 갖는다. 도 14의 구현예와 같은 구현예들에서, 버퍼 가스는 버퍼 가스 분배기 (1405) 와 통합되는 하나 이상의 가스 분배 통로들 (1436) 에 의해 제 1 가스 분배 포트들 (1434) 및 제 2 가스 분배 포트들 (1435) 로 운반될 수도 있다. 예를 들어, 버퍼 가스 분배기는 가스 분배 통로들 (1436) 이 머시닝되는 알루미늄 플레이트로 이루어질 수도 있고; 이어서 보다 얇은 알루미늄 커버 플레이트가 버퍼 가스 분배기 (1405) 를 생성하도록 머시닝된 플레이트에 납땜되거나 그렇지 않으면 본딩될 수도 있다. 제 2 가스 분배 포트들 (1435) 이 또한 플레이트 내로 머시닝될 수도 있거나, 커버 플레이트가 부착된 후에 플레이트의 측면들 내로 드릴링될 수도 있다.
엄밀히, 버퍼 가스 분배기 (1405) 가 제작되는 방법에 상관없이, 버퍼 가스 분배기 (1405) 는 반도체 웨이퍼들의 멀티-웨이퍼 스택 내의 반도체 웨이퍼들 사이에 실제로 삽입 가능하게 충분히 얇도록 설계될 수도 있다. 이에 대응하여, 본 명세서에서 논의된 버퍼 가스 분배기들 및 엔드 이펙터들은, 엔드 이펙터들 및 버퍼 가스 분배기들이 수직 축을 따라, 예를 들어, 웨이퍼들에 대해 수직 방향으로 배열된 반도체 웨이퍼들의 이격된 스택 내로 삽입 가능하도록 수직 축을 따라 이격될 수도 있다. 그러므로, 엔드 이펙터들 및 버퍼 가스 분배기들은 각각 이러한 적층된 반도체 웨이퍼들 사이의 웨이퍼 사이의 갭들 내에 피팅되도록 개별적으로 사이징될 수도 있다. 예를 들어, 반도체 제작 동작들에서 사용된 장비의 다양한 피스들은 수직의, 이격된 스택 또는 어레이의 복수의 반도체 웨이퍼들을 지지할 수도 있다. 이 출원에서 논의된 FOUP들은 하나의 이러한 멀티-웨이퍼 저장 시스템의 예이다. FOUP에서, 많은 수의 웨이퍼들, 예를 들어, 25 개의 웨이퍼들은 규칙적으로 이격된 간격들로 FOUP의 측벽들로부터 돌출한 핀들, 레지들 (ledges), 또는 다른 웨이퍼 지지 피처들에 의해 지지될 수도 있다. 이들 웨이퍼 지지 피처들, 그리고 따라서 웨이퍼 지지 피처들이 지지하는 웨이퍼들은, 예를 들어, 웨이퍼 각각이 대략 10 ㎜ (웨이퍼 두께를 뺀 - 300 ㎜ 직경 웨이퍼에 대해,- 이 두께는 약 0.75 ㎜) 의 웨이퍼 사이의 갭만큼 이웃한 웨이퍼 각각으로부터 분리되도록, 수직 축을 따라 서로로부터 이격될 수도 있다. 물론, 이 간격은 장비에 따라 가변할 수도 있다 - 예를 들어, 450 ㎜ 웨이퍼들은 15 ㎜만큼 이격될 수도 있다 -. 그러므로, 버퍼 가스 분배기 (1405) 는 9 ㎜ 미만인 반도체 웨이퍼 (1404) 와 오버랩하는 구역들에서 그리고 웨이퍼 (1404) 에 대해 수직인 방향에서 두께를 가질 수도 있지만 - 엔드 이펙터와 버퍼 가스 분배기 사이에 이동 간격을 허용하는 것은 이러한 두께로 하여금 예를 들어, 웨이퍼 사이의 갭 거리의 약 아마도 1/3 미만의 두께, 예를 들어, 3 ㎜ 미만의 두께로 감소되게 함 - 사용된 특정한 두께는 물론 논의되고 있는 툴의 치수 제한들에 의존하고 그리고 상기 예는 모든 경우들에서 3 ㎜ 이하의 두께로 이 개시를 제한한다고 보여지지 않는다.
버퍼 가스 분배기 (1405) 가 사용될 수도 있는 멀티-웨이퍼 저장 시스템들의 다른 예들은 멀티-웨이퍼 카세트들, 버퍼들, 스토커들, 및 로드-록들을 포함한다. 멀티-웨이퍼 카세트는 동시 방식으로 복수의 웨이퍼들을 일정 위치로부터 일정 위치로 수송하도록 반도체 프로세싱 툴 내에서 사용될 수도 있다. 버퍼는 EFEM의 내부에 있을 수도 있거나 EFEM의 내부로부터 액세스 가능할 수도 있는 멀티-웨이퍼 저장 시스템이고; 버퍼는 웨이퍼들을 FOUP로 이송하기 전에 프로세싱 동안 또는 프로세싱 후에 웨이퍼들을 일시적으로 저장하도록 사용될 수도 있다. 예를 들어, 반도체 웨이퍼는, 프로세싱 후 그리고 반도체 웨이퍼가 (통상적으로 플라스틱으로 이루어지고 그리고 따라서 고온 웨이퍼와의 콘택트를 통해 손상될 수 있는) FOUP 내에 배치되기 전에 냉각될 필요가 있을 수도 있다 - 이러한 반도체 웨이퍼는 대기 중인 FOUP 내로 운반되기 전에 냉각되도록 버퍼 내에 일시적으로 파킹될 (parked) 수도 있다. 스토커는 반도체 프로세싱 툴 내의 반도체 웨이퍼들의 큰 저장소로서 작용하는 시스템이다. 스토커는 예를 들어, 10 개, 또는 심지어 수백 개의 반도체 웨이퍼들을 한 번에 저장할 수도 있고, 그리고 따라서 심지어 캐로절로서 작용하도록 회전 가능할 수도 있다. 스토커들은 연이은 프로세싱 단계들 동안 프로세싱 시간들의 미스매치 (mismatch) 에 기인하여 축적되는 반도체 웨이퍼들을 저장하도록 사용될 수도 있다. 로드-록들은 웨이퍼들로 하여금 상이한 대기 환경들 사이에서 통과되게 하는 에어록들이다. 예를 들어, 로드-록은 웨이퍼들을 대기 환경으로부터 거의 진공 환경 또는 진공 환경으로 이송하도록 사용될 수도 있다. 대부분의 로드-록들은 단지 하나 또는 2 개의 웨이퍼들을 한 번에 이송하지만, 다른 로드-록들은 복수의 웨이퍼들을 동시에 이송하기 위한 제공들을 가질 수도 있다. 이들 타입들의 멀티-웨이퍼 저장 시스템들 각각은 자체 웨이퍼 사이의 간격을 가질 수도 있고, 그리고 이러한 시스템들을 사용하여 사용되도록 구성되는 버퍼 가스 분배기는 이러한 시스템들에서 이웃한 웨이퍼들 사이의 웨이퍼 사이의 간격 또는 갭 (웨이퍼 두께를 뺀) 미만인 두께를 갖도록 설계될 수도 있다. 예를 들어, 버퍼 가스 분배기는 상단 표면과 하단 표면 사이의 재료의 또 다른 1 ㎜의 두께와 함께, 상단 표면과 하단 표면에 대해 대략 2 ㎜의 두께, 예를 들어, 0.5㎜의 두께를 가질 수도 있다.
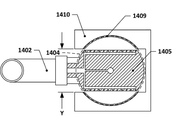
버퍼 가스 분배기의 감소된 폭 X에 기인하여, 버퍼 가스 분배기는 (엔드 이펙터를 향하는 적어도 갭 Y를 각각 갖고 그리고 X보다 큰) FOUP 내의 웨이퍼 지지 구조체들을 방해하지 않고 임의의 높이로 FOUP 내로 완전히 삽입될 수도 있다. 예를 들어, 도 16에 도시된 바와 같이, FOUP (또는 다른 멀티-웨이퍼 저장 시스템) 가 비어있고 그리고 이러한 버퍼 가스 분배기가 FOUP 내로 또는 FOUP로부터 웨이퍼들을 배치하거나 제거하도록 사용되는 동일한 정도로 FOUP 내로 삽입된다면, 엔드 이펙터 (1493) 및 버퍼 가스 분배기 (1405) 는 웨이퍼 지지 피처들 (1409) 과의 충돌 없이 FOUP (1410) 내에서 상측으로 그리고 하측으로 이동될 수도 있고, 즉, 버퍼 가스 분배기 (1405) 는 이러한 일 위치에 있을 때 그리고 웨이퍼 (1404) 에 대해 수직인 방향으로부터 보일 때 웨이퍼 지지 피처들과 오버랩하지 않는다. 이러한 구현예는, 버퍼 가스 분배기의 상단 표면 (1432) 이 웨이퍼와의 엔드 이펙터 (1493) 의 상호작용들 동안, 웨이퍼 바로 위에 있는 웨이퍼 지지 피처 (1409) 의 밑면을 지나 이동될 수도 있기 때문에, 버퍼 가스 분배기 (1405) 로 하여금 웨이퍼 (1404) 에서 더 이격되거나 보다 두꺼워지게 할 수도 있다. 그러므로, 나중에 논의되는 이 구현예 및 다른 구현예들과 같은, 일부 구현예들에서, 버퍼 가스 분배기는 엔드 이펙터의 모든 이동 동안 엔드 이펙터에 대해 고정될 수도 있다.
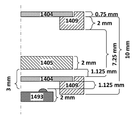
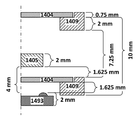
도 17 내지 도 22는 이러한 버퍼 가스 분배기의 이점을 보여준다. 도 17 내지 도 19는 2 개의 웨이퍼 지지 피처들 (1409) 의 상세한 부분적인 측면도들을 도시한다; 웨이퍼 지지 피처 (1409) 각각은 대응하는 웨이퍼 (1404) 의 에지를 지지한다. 웨이퍼 (1404) 와 오버랩하는 엔드 이펙터 (1493) 의 전체 부분이 웨이퍼와 콘택트하는 경우보다 감소된 콘택트 영역을 가진 웨이퍼 (1404) 의 밑면과 콘택트할 수도 있는 상승된 범프들을 가진 엔드 이펙터 (1493) 가 도시되고; 웨이퍼 (1404) 와 실제로 콘택트하는 엔드 이펙터의 부분들은 본 명세서에서 "콘택트 표면들"로서 지칭될 수도 있다. 도 17 내지 도 19에서 웨이퍼 (1404) 는 0.75 ㎜ 두께이고, 그리고 엔드 이펙터 (1493), 버퍼 가스 분배기 (1405), 및 실제로 웨이퍼들 (1404) 을 지지하는 웨이퍼 지지 피처들 (1409) 의 부분들은 모두 2 ㎜ 두께이다. 이 예에서, 웨이퍼들 (1404) 은 10 ㎜의 중심 대 중심 거리를 갖고 이격되고, 웨이퍼들 (1404) 바로 위에 웨이퍼들 (1404) 의 상단들과 웨이퍼 지지 피처들 (1409) 의 최하단 표면 사이에 7.25 ㎜ 갭을 발생시킨다. 이들 조건들 하에서, 웨이퍼 스택 내로의 엔드 이펙터 (1493) 및 버퍼 가스 분배기 (1405) 의 삽입 동안 웨이퍼 (1404) 와 버퍼 가스 분배기 (1405) 와 엔드 이펙터 (1493) 사이뿐만 아니라 웨이퍼 (1404) 의 제거 동안 웨이퍼 지지 피처들 (1409) 과 웨이퍼 (1404) 와 버퍼 가스 분배기 (1405) 사이에 최대의 가능한 간격을 유지하는 것이 가능하다면, 엔드 이펙터 (1493) 및 버퍼 가스 분배기 (1405) 는 단지 웨이퍼 스택 내로의 엔드 이펙터 (1493) 및 버퍼 가스 분배기 (1405) 의 삽입 동안 1.125 ㎜의 거리만큼 웨이퍼 (1404) 로부터 오프셋될 것이다. 엔드 이펙터 (1493) 및 버퍼 가스 분배기 (1405) 가 웨이퍼 스택 내로 완전히 삽입된 후에, 엔드 이펙터 (1493) 및 버퍼 가스 분배기 (1405) 는 도 18에 도시된 바와 같이, 엔드 이펙터 (1493) 가 웨이퍼 (1404) 와 콘택트하도록 상승될 수도 있다. 도 19에서, 엔드 이펙터 (1493), 버퍼 가스 분배기 (1405), 및 웨이퍼 (1404) 는, 이전에 웨이퍼를 지지한 웨이퍼 지지 피처 (1409) 의 상단 표면과 웨이퍼 (1404) 사이의 1.125 ㎜의 갭뿐만 아니라 리프팅될 웨이퍼 (1404) 바로 위에 웨이퍼 지지 피처 (1409) 의 밑면과 버퍼 가스 분배기 (1405) 사이의 1.125 ㎜의 갭이 있도록, 더 상승된다. 그러므로, 웨이퍼 스택으로부터의 엔드 이펙터 삽입/제거 동안 고정된 컴포넌트들과 이동하는 컴포넌트들 사이의 수직 간격은 모두 이 시나리오에서 1.125 ㎜로 최대화될 수도 있다.
도 20 내지 도 22에서 보이는 바와 같이, 버퍼 가스 분배기를 수직 축을 따라 볼 때 웨이퍼 지지부들 (1409) 과 오버랩하지 않도록 그리고 엔드 이펙터 (1493) 및 버퍼 가스 분배기 (1405) 가 웨이퍼 지지 피처들 (1409) 과 콘택트하지 않고 웨이퍼 스택 내에 임의의 높이로 삽입될 수도 있도록 버퍼 가스 분배기 (1405) 의 폭을 감소시킴으로써, 동일한 시나리오에서 다양한 컴포넌트들 사이의 최대 간격은 1.625 ㎜로 증가될 수도 있고, 이는 간격 여유에서 44 % 증가이다. 이것은 버퍼 가스 분배기 (1405) 위의 수직 간격이 제거될 웨이퍼 (1404) 위의 웨이퍼 지지 피처 (1409) 에 의해 제한되지 않지만, 대신에, 제거되는 웨이퍼 (1404) 위에 있는 웨이퍼 (1404) 에 의해 제한되기 때문이다.
상기 논의로부터 분명해지는 바와 같이, 예를 들어, 연관된 엔드 이펙터에 의해 수송될 웨이퍼의 전체 폭에 걸쳐 연장하지 않는 버퍼 가스 분배기를 사용하는 것은, 버퍼 가스 분배기로 하여금 이격된 웨이퍼들의 스택 내로 완전히 삽입되게 한다. 이것은 버퍼 가스로 하여금 웨이퍼가 엔드 이펙터가 연결되는 로봇에 의해 수송되는 전체 시간 동안 웨이퍼에 걸쳐 버퍼 가스 분배기로부터 흐르게 한다. 이것은 예를 들어, 버퍼 가스 분배기들이 너무 커서 웨이퍼 스택 내로 삽입되지 못하고 그리고 대신에 엔드 이펙터로 하여금 버퍼 가스 분배기의 수반 없이 웨이퍼 스택 내로 삽입되게 하도록 엔드 이펙터에 대해 이동될 수도 있는 시스템들과 대조적이다. 이러한 시스템들에서, 웨이퍼는 웨이퍼가 웨이퍼 스택으로부터 철수될 때 버퍼 가스에 의해 일시적으로 실드되지 않을 수도 있고, 그리고 따라서 비-버퍼 가스 대기로부터 오염 및/또는 손상에 보다 취약할 수도 있다.
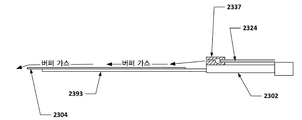
일부 구현예들에서, 버퍼 가스 분배기는 웨이퍼 위에 전혀 있을 필요가 없지만, 대신에, 예를 들어, 웨이퍼의 주변의 위치로부터 웨이퍼 위로 버퍼 가스의 박층을 지향시키는 슬릿-팬 노즐일 수도 있다. 이 방법은, 버퍼 가스 분배기 자체가 위로부터 다가가는 공기 플로우에 대해 웨이퍼의 적어도 일부에 대한 불침투성 실드로서 작용하는, 본 명세서에서 앞서 논의된 버퍼 가스 분배기들과 대조적으로, 이 기법을 사용하는 웨이퍼의 직접적인 실드가 전혀 없을지라도, 구현하기가 가장 쉬울 수도 있다. 이 기법은 도 23 및 도 24에 예시된다. 예를 들어, 도 23 및 도 24에서, 로봇 암 (2302) 은 버퍼 가스 공급부 (2324) 에 연결되는 슬릿-팬 노즐 (2337) 을 구비한다. 슬릿-팬 노즐 (2337) 은 웨이퍼 (2304) 가 로봇 암 (2302) 의 엔드 이펙터 (2393) 에 의해 지지되는 면 위에 위치된다. 슬릿 팬 노즐 (2337) 은 웨이퍼 (2304) 의 표면에 걸쳐 팬 형상의 패턴으로 버퍼 가스 플로우를 지향시킬 수도 있고, 이에 따라 웨이퍼 (2304) 위에 국부화된 버퍼 가스 층을 제공한다. 그러나, 버퍼 가스 분배기/슬릿-팬 노즐 (2337) 에 의한 웨이퍼 (2304) 의 물리적 실드가 없기 때문에, 이러한 배열들은 웨이퍼 (2304) 를 지나는 상당한 공기 플로우가 있는 환경들에 부적합할 수도 있다. 도 25는 버퍼 가스를 팬 형상으로 외측으로 흘리는 단일의 슬릿-팬 노즐 (2337) 대신에, 노즐 구조체 (2538) 가 웨이퍼 (2504) 의 외측 원주의 상당한 부분, 예를 들어, 25 % 또는 그 이상을 따라 걸치는 출구 영역 또는 출구 영역들을 가진 하나 이상의 노즐들을 포함할 수도 있다는 것을 제외하고, 유사한 예를 도시하고, 따라서 버퍼 가스의 박층이 웨이퍼 (2504) 의 전체 노출된 상부 표면에 걸쳐 분포될 보다 큰 확실성을 제공한다.
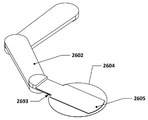
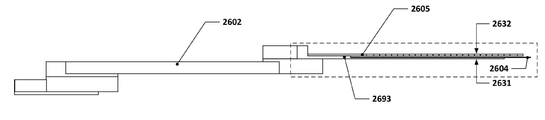
도 26 내지 도 30은 예시적인 버퍼 가스 분배기의 등축도, 절단된 등축도, 상세한 절단된 등축도, 측면도, 및 상세한 측면도를 각각 도시한다. 보이는 바와 같이, 로봇 암 (2602) 은 버퍼 가스 분배기 (2605) 를 가진 엔드 이펙터 (2693) 를 포함한다. 웨이퍼 (2604) 는 엔드 이펙터 (2693) 에 의해 지지된다. 도 28에서 보이는 바와 같이, 버퍼 가스 분배기 (2605) 는, 버퍼 가스로 하여금 방사상으로 배열된 화살표들에 의해 도시된 바와 같이, 버퍼 가스 분배기 (2605) 의 중심 근방으로부터 웨이퍼 (2604) 에 걸쳐 외측으로 흐르게 하는, 버퍼 가스 분배기 (2605) 의 하단 표면에 위치된 제 1 가스 분배 포트 (2634) 로 이어지는 버퍼 가스 통로들 (2636) 을 가질 수도 있다. 버퍼 가스 통로들 (2636) 은 또한 도 28에서 평행한 화살표들로 도시된 바와 같이, 엔드 이펙터 (2693) 에 대해 반대편의 횡 방향들로 버퍼 가스를 지향시킬 수도 있는, 측면 표면들 (2633) 에 위치된 복수의 제 2 가스 분배 포트들 (2635) 로 버퍼 가스를 공급할 수도 있다. 버퍼 가스 분배기 (2605) 는 상부 표면 (2632) 및 반대편의 하단 표면 (미도시) 을 가질 수도 있다. 도 30에서 보이는 바와 같이, 버퍼 가스 분배기 (2605) 는 몇몇의 부분들을 가진 것으로 보일 수도 있다. 예를 들어, 버퍼 가스 분배기 (2605) 는 웨이퍼의 수직 방향으로부터 볼 때 웨이퍼 (2604) 와 중첩되는 버퍼 가스 분배기 (2605) 의 부분과 중첩되지 않는 버퍼 가스 분배기의 나머지 부분 사이에서 분할될 수도 있다. 유사하게, 버퍼 가스 분배기 (2605) 는 버퍼 가스 분배기 (2605) 의 최외측 절반, 즉, 부분 (2639) 의 최외측 절반 (2640) 사이에서 분할될 수도 있다 ("절반"은 전체 버퍼 가스 분배기 (2605) 보다는, 웨이퍼 (2604) 와 중첩하는 버퍼 가스 분배기 (2605) 의 부분에 대한 것임).
상기 예들로부터 분명해지는 바와 같이, 버퍼 가스 분배기들은 웨이퍼들이 연관되는 엔드 이펙터들에 의해 수송된 웨이퍼들 위에 위치될 수도 있다. 또한, 적어도 일부 구현예들에서, 버퍼 가스 분배기들의 적어도 최외측 절반들은 웨이퍼 면에 평행하고 엔드 이펙터의 장축에 대해 수직인 방향에서 볼 때 웨이퍼들과 중첩하지 않고, 예를 들어, 웨이퍼들 (2604) 을 둘러싸거나 부분적으로 둘러싸도록 버퍼 가스 분배기들의 밑면들로부터 연장하는 수직 벽이 없다. 일부 추가의 이러한 구현예들에서, 웨이퍼 면과 평행한 방향을 따라 보고 엔드 이펙터의 장축에 대해 수직인 방향을 따라 볼 때 부분 (2639) 내에서 버퍼 가스 분배기 (2605) 와 웨이퍼 (2604) 사이의 오버랩이 전혀 없을 수도 있다.
일부 맥락들에서 로봇 암에 의해 수송될 웨이퍼 주위에 국부화된 버퍼 가스 환경을 제공하도록 사용될 수도 있는 또 다른 타입의 버퍼 가스 분배 시스템은 Bernoulli-타입 엔드 이펙터이다. Bernoulli-타입 엔드 이펙터는 웨이퍼가 블레이드 엔드 이펙터 또는 다른 구조체에 의해 아래로부터 지지되지 않지만, 대신에 Bernoulli 효과를 통해 엔드 이펙터 밑에서 서스펜딩되는 (suspend) 엔드 이펙터이다. 도 74에 도시된 엔드 이펙터와 같은, 이러한 엔드 이펙터들에서, 엔드 이펙터 (9593) 는 대체로 웨이퍼 (9504) 와 동일하거나 보다 큰 직경의 디스크일 수도 있다. 디스크는 중간에 가스 포트 (9536) 를 가질 수도 있다; 엔드 이펙터 (9593) 가 웨이퍼 (9504) (웨이퍼 (9504) 는 엔드 이펙터 (9593) 의 디스크 부분 상에 중심이 위치됨) 에 가까이 홀딩될 때, 버퍼 가스는 중심 가스 포트 (9436) 를 통해 흐를 수도 있다. 이어서 버퍼 가스는 웨이퍼 (9504) 의 에지들을 향하여 방사상으로 외측으로 흐를 것이다. 이 방사상 가스 플로우는 Bernoulli 효과, 즉, 웨이퍼 (9504) 와 엔드 이펙터 (9593) 사이에 저압 구역을 생성하고, 그리고 웨이퍼 (9504) 의 밑면 상의 대기압은 웨이퍼 (9504) 로 하여금 엔드 이펙터 (9593) 를 향하여 밀리게 할 것이다. 동시에, 웨이퍼 (9504) 와 엔드 이펙터 (9593) 사이에서 흐르는 버퍼 가스의 압력은 웨이퍼 (9504) 가 엔드 이펙터 (9593) 와 콘택트하지 못하게 한다. 엔드 이펙터 (9593) 는 웨이퍼 (9504) 를 엔드 이펙터 (9593) 의 디스크 부분 상에 중심이 위치되게 유지하고 그리고 엔드 이펙터 (9593) 에 대해 웨이퍼 (9504) 의 회전을 방지하도록 웨이퍼 (9504) 의 에지와 콘택트하는 방사상 정지부들 (95103) 을 가질 수도 있다. Bernoulli 효과를 생성하도록 흐르는 버퍼 가스는 Bernoulli 효과를 제공하는 것에 더하여, 또한 상기에 논의된 버퍼 가스 마이크로클라이메이트를 제공할 수도 있다. 따라서, Bernoulli 엔드 이펙터가 일부 구현예들에서, 상기에 논의된 개별적인 엔드 이펙터 및 버퍼 가스 분배기 구현예들 대신에 사용될 수도 있다.
FOUP들
및 다른 멀티-웨이퍼 저장 시스템들 내의 마이크로클라이메이트들
이송 챔버 또는 다른 밀봉하여 시일링된 환경의 보호 외부에서 발생하는 웨이퍼 이송 동작들 동안 웨이퍼 오염을 완화시키거나 방지하도록 상기에 논의된 EFEM들 및 버퍼 가스 분배기들을 구비한 버퍼 가스와 같은 시스템들 및 기법들을 사용하는 것에 더하여, 웨이퍼들은 또한 멀티-웨이퍼 저장 시스템 내에서 버퍼 가스의 도입을 통해 멀티-웨이퍼 저장 시스템들의 범위들 내에서 보호될 수도 있다. 예를 들어, 앞서 언급된 바와 같이, FOUP들은 오염 또는 손상으로부터 FOUP들 내에 포함된 웨이퍼들을 보호하도록 흔히 버퍼 가스로 충진된다. FOUP들이 트랜짓 동안 시일링되기 때문에, FOUP들은 FOUP 내에 수송될 웨이퍼들을 가진 FOUP 내에 시일링되는 버퍼 가스와 함께 로딩될 수도 있다. 그러나, FOUP가 로드 포트에 도킹된다면, FOUP의 주요 개구를 시일링하도록 사용되는 도어는 FOUP 내에 포함된 웨이퍼들로 하여금 액세스되게 하도록 FIM (Front-Opening Interface Mechanism) 등을 사용하여 제거될 수도 있다. FOUP의 도어가 제거된다면, 내부에 있을 수도 있는 버퍼 가스는 주변 환경으로 자유롭게 확산한다 (그리고 주변 환경의 공기도 유사하게 FOUP 내로 자유롭게 확산함). FOUP 도어가 개방된 후 FOUP 내의 버퍼 가스 환경의 손실에 대응하도록, 추가의 버퍼 가스가 하나 이상의 FOUP 버퍼 가스 포트들, 예를 들어, 버퍼 가스를 획득하고 버퍼 가스를 FOUP의 내부로 라우팅하기 (route) 위해서 반도체 프로세싱 툴의 로드 포트 또는 다른 부분들 상의 피처들과 인터페이싱할 수도 있는 포트들을 통해 FOUP 내로 흐를 수도 있다. FOUP 버퍼 가스 포트들은 FOUP가 시일링된 후에 버퍼 가스로 FOUP를 "충전"하도록 처음에 사용되는 동일한 포트들일 수도 있다.
통상적인 EFEM은 EFEM 벽들 내의 대체로 직사각형 개구와 인터페이싱하도록 통상적으로 설계되는 하나 이상의 로드 포트 유닛들을 구비할 것이다. 로드 포트 유닛은 FOUP 상의 대응하는 피처들과 인터페이싱하는 플랫폼들 또는 페데스탈들 상에 위치설정 또는 인덱싱 피처들을 가진 하나 이상의 플랫폼들 또는 페데스탈들을 포함할 수도 있다. 이들 피처들은 FOUP가 플랫폼 상에 배치될 때 목표된 위치에 위치된다는 것을 보장한다. 로드 포트 유닛은 또한 슬라이딩 업 그리고 슬라이딩 다운할 수도 있는 도어를 포함할 수도 있고; 도어는 대체로 이동식 FOUP 도어와 평행하고, 그리고 로드 포트 유닛이 EFEM 내에 설치될 때, 주변 환경으로부터 EFEM의 내부를 폐쇄할 수도 있다. FOUP가 플랫폼 상에 배치될 때, FOUP의 이동식 FOUP 도어는 로드 포트 유닛의 도어를 향할 수도 있다. 로드 포트 유닛의 도어는 예를 들어, 이동식 FOUP 도어와 인게이징하고 그리고 FOUP에서 이격되어 이동식 FOUP 도어를 당기도록 작동되어 FOUP를 시일링할 수도 있는 FIM을 포함할 수도 있다. 이동식 FOUP 도어가 FIM에 의해 FOUP에서 이격되어 당겨진다면, 로드 포트 유닛의 도어는 하강되거나 그렇지 않으면 한쪽으로 이동될 수도 있어서, 이동식 FOUP 도어를 로드 포트 유닛을 사용하여 운반한다. 이동식 FOUP 도어가 제거되고 한쪽으로 슬리이딩된다면, FOUP 내의 웨이퍼들의 전체 스택은 EFEM 내에서 웨이퍼 핸들링 로봇에 액세스 가능할 수도 있다.
본 발명자들의 일부 또는 모두는 이동식 FOUP 도어가 제거된 후에 버퍼 가스가 FOUP를 통해 흐른다면 이러한 배열이 문제가 될 수도 있다는 것을 알아냈다. FOUP 의 큰 개구에 기인하여 (300 ㎜ 웨이퍼들을 운반하기 위한 FOUP는 적어도 300 ㎜ 폭의 개구를 가질 수도 있고, 그리고 웨이퍼들의 수, 250 ㎜ 내지 300 ㎜ 또는 그 이상의 높이에 의존함), 버퍼 가스의 상당한 플로우는 FOUP 내에서 정압을 유지하도록 요구될 필요가 있을 수도 있다 (EFEM으로부터의 공기가 FOUP 내로 흡입되거나 확산되는 것으로부터 방지하는 것이 일반적으로 바람직하고, 여기서 이것은 FOUP 내의 모든 웨이퍼들을 오염시킬 수도 있음). 이것은 고가이고 그리고/또는 이러한 플로우들을 유지하도록 필요한 버퍼 가스의 볼륨들에 기인하여 안전상의 위험이 있을 수도 있다.
본 발명자들의 일부 또는 모두는 로드 포트 유닛의 도어가 FOUP 내에서 정압을 유지하도록 필요한 버퍼 가스 플로우의 양을 감소시키도록 수정될 수 있다는 것을 알아냈다. 도 31에서 보이는 바와 같이, 설비 공기 핸들러 (3121) 를 가진 또한 인클로저 (3101) 로서 간주될 수도 있는 EFEM (3111) 이 도시되고; EFEM (3111) 은 플로어 (3143) 상에 놓일 수도 있다. EFEM (3111) 은, 대안적으로 예를 들어, EFEM (3111) 의 내부 볼륨이 도 1 내지 도 5의 EFEM들과 유사한, EFEM (3111) 을 통해 흐르는 버퍼 가스를 가질 수도 있도록 버퍼 가스 시스템을 구비한 EFEM일 수도 있다는 것이 이해된다. EFEM (3111) 은 또한 로드-록 (미도시됨, 하지만 유사한 이러한 구조체들이 EFEM (3111) 에 대해 배열될 수도 있는 방법의 예에 대해 도 2 참조) 을 통해 하나 이상의 웨이퍼 프로세싱 챔버들 및/또는 웨이퍼 이송 챔버와 연결될 수도 있다. EFEM (3111) 은 EFEM을 통해 웨이퍼들 (3104) 을 이송하도록 사용될 수도 있는 엔드 이펙터 (3193) 를 가진 로봇 암 (3102) 을 EFEM (3111) 내에 위치시킬 수도 있다. EFEM (3111) 은 또한 FOUP (3110) 를 지지하기 위한 인터페이스 (3127) 를 제공하거나 인터페이스 (3127) 로서 작용하는 로드 포트 유닛 (3113) 과 연결될 수도 있다. FOUP (3110) 는 FOUP (3110) 의 내부 볼륨 내로 버퍼 가스를 도입하도록 사용될 수도 있는 버퍼 가스 공급 포트 또는 FOUP 포트 (3195) 를 가질 수도 있고; FOUP 시일 (31111) 은 버퍼 가스가 FOUP (3110) 와 EFEM (3111) 사이의 갭에서 탈출하는 것을 방지하도록 EFEM (3111) 에 대해 FOUP (3110) 를 시일링할 수도 있다 (이 시일은 다른 도면들에서 도시되지 않지만, 그럼에도 불구하고 존재할 수도 있음). 이 예에서 FOUP (3110) 의 상단에 위치된 FOUP 포트 (3195) 가 도시되지만, FOUP 포트 (3195) 는 또한 다른 위치들, 예를 들어, FOUP (3110) 가 인터페이스 (3127) 의 부분인 버퍼 가스 공급 포트 (미도시) 와 인터페이싱할 수도 있도록 FOUP (3110) 의 하단에 배치될 수도 있다는 것이 이해된다. 웨이퍼들 (3104) 은 반도체 웨이퍼들 (3107) 의 수직으로 분리된 스택에서 FOUP (3110) 상부에 지지된 웨이퍼들 (3104) 에 간격을 두도록 FOUP (3110) 의 내부 표면들을 따라 배열될 수도 있는 웨이퍼 지지 피처들 (또는 웨이퍼를 지지하는 피처들) (3109) 에 의해 지지될 수도 있다. EFEM (3111) 또는 로드 포트 유닛 (3113) 은 또한 구동 메커니즘 (3158) 에 의해 수직으로 이동될 수도 있는 이동 가능한 벽 또는 도어 (3178) 를 포함할 수도 있고; 구동 메커니즘 (3158) 은 예를 들어, 도어 (3178) 를 위 아래로 수직으로 이동시키도록 사용될 수도 있는 선형 액추에이터 또는 다른 기계 또는 전기기계 시스템일 수도 있다. 도어 (3178) 는 하부 절반 (웨이퍼들 (3104) 로 하여금 FOUP (3110) 로부터 제거되거나 FOUP (3110) 내에 배치되게 하도록 FOUP (3110) 로부터 이동식 FOUP 도어 (3141) 를 제거하기 위해서 사용될 수도 있는 FIM을 구비함) 및 상부 절반을 가질 수도 있다. 수평 슬롯 (3146) 은 2 개의 절반들을 효과적으로 분리할 수도 있다. 종래의 로드 포트 유닛에서, 도어는 수평 슬롯 (3146) 또는 도어 (3178) 의 상부 절반을 포함하지 않을 것이다.
도 32에서 보이는 바와 같이, FOUP (3110) 가 로드 포트 유닛 (3113)/인터페이스 (3127) 상에 배치된다면, FIM (3142) 은 도 33에 도시된 바와 같이, 철수될 수도 있는 이동식 FOUP 도어 (3141) 외부로 연장하거나 이동식 FOUP 도어 (3141) 와 인터페이싱할 수도 있다. 이동식 FOUP 도어 (3141) 가 FOUP (3110) 로부터 제거된다면, 도어 (3178) 는 수평 슬롯 (3146) 이 FOUP (3110) 내의 웨이퍼들 (3104) 중 일 웨이퍼와 일렬로 있도록 구동 메커니즘 (3158) 을 사용하여 하강될 수도 있다. EFEM (3111) 내의 로봇 암 (3102) 은 도 34에서 보이는 바와 같이, 이어서 FOUP (3110) 내로 도달할 수도 있고 그리고 웨이퍼 (3104) 를 철수시킬 수도 있다. 상이한 위치에서의 웨이퍼가 목표된다면, 로드 포트 유닛의 도어는 도 35에서 보이는 바와 같이, 다른 웨이퍼와 수평 슬롯을 정렬시키도록 이동될 수도 있다. FOUP 내로 흐르는 임의의 버퍼 가스는 전체 FOUP 개구의 단면적보다 상당히 작은 단면적, 예를 들어, 아마도 FOUP 개구의 1/25 면적을 가진 수평 슬롯을 통해 FOUP에서 흐를 수도 있다. 또한 FOUP로부터 수평 슬롯을 가진 벽 또는 도어와 FOUP 사이의 갭들을 통해 탈출하는 버퍼 가스가 있을 수도 있고; 이들 부분들 사이에서 러빙함으로써 (rubbing) 유발될 수도 있는 과도한 입자 생성을 회피하도록 이 인터페이스에 시일을 제공하는 것이 바람직하지 않을 수도 있다. 그러나, 이들 갭들 및 수평 슬롯에 의해 제공된 플로우 경로들은 여전히 전체적으로, FOUP의 내부 볼륨과 인클로저/EFEM의 내부 볼륨 사이에 플로우 제한 배리어를 제공할 수도 있다. 이것은 부응하여 FOUP 내의 정압의 목표된 정도를 유지하도록 필요한 버퍼 가스 플로우의 양을 감소시키고, 이에 따라 비용을 감소시키고 그리고 안전함을 증가시킨다.
상기에 기술된 설계의 추가의 변형이 도 36에 도시된다. 도 36에서, 로드 포트 유닛 (3613) 을 위한 도어가 없고 그리고 EFEM (3611) 은 고정된 수평 슬롯 (3646) 을 포함하는 벽을 갖는다. EFEM (3611) 은 또한 로드-록을 통해 하나 이상의 웨이퍼 프로세싱 챔버들 및/또는 웨이퍼 이송 챔버와 연결될 수도 있다 (미도시되지만, 유사한 이러한 구조체들이 EFEM (3611) 에 대해 배열될 수도 있는 방법의 예에 대해 도 2를 참조). 이 구현예에서, 로드 포트 유닛 (3613) 은 FOUP (3610) 를 지지하는 플랫폼 또는 인터페이스 (3627) 로 하여금 EFEM (3611) 에 대해 위 아래로 이동되게 하는 수직 구동 메커니즘 (3659) 을 포함한다. EFEM (3611) 은 FOUP (3610) 가 특정한 수직 위치에 있을 때 이동식 FOUP 도어 (3641) 를 제거할 수도 있는 FIM (3642) 을 포함할 수도 있다 (도 37 및 도 38 참조). 로드 포트 유닛 (3613) 은 이어서 수평 슬롯 (3646) 과 FOUP (3610) 내의 웨이퍼들 (3604) 중 일 웨이퍼를 정렬시키도록 하강될 수도 있다 (또는 FIM (3642) 이 위치되는 곳에 따라 상승될 수도 있음) (도 39 참조). 또 다른 웨이퍼 (3604) 가 목표된다면, 그러면 FOUP (3610) 는 수평 슬롯과 다른 웨이퍼를 정렬시키도록 수직으로 위치될 수도 있다 (도 40 참조). 상기 섹션들에 기술된 바와 같이, 수평 슬롯을 가진 벽 또는 도어를 가진 구현예들은 상기에 약술된 바와 같이 수평 슬롯 피처의 공동 합체에 기인한 "수평 슬롯 콘셉트들"로서 본 명세서에서 지칭될 수도 있다. 이러한 구현예들에서 사용되는 구동 메커니즘들이 수평 슬롯 (3146 또는 3646) 과 멀티-웨이퍼 저장 시스템을 지지하는 인터페이스 사이에서 상대적인 수직 병진을 제공할 수도 있다는 것이 이해된다.
도 41은 또 다른 예시적인 EFEM의 측면도를 도시한다. 도 41에서, 도 31 내지 도 35의 EFEM (3111) 과 유사한 EFEM (4111) 이 도시되고, 그리고 도 31 내지 도 35의 엘리먼트들의 논의는 도 41에 도시된 구현예에 대해 동일하게 적용 가능하다. 그러나, 도 41의 구현예는 웨이퍼들 (4104) 의 스택 (4107) 내로 삽입 가능한 이 개시에서 논의된 버퍼 가스 분배기들 중 임의의 버퍼 가스 분배기일 수도 있는, 웨이퍼 스택 내의 웨이퍼들 사이의 웨이퍼 사이의 갭들 내로 삽입 가능한 버퍼 가스 분배기 (4105) 를 더 포함한다. 그러므로, 웨이퍼들 (4104) 은 (FOUP 가스 포트 (4195) 를 통해 제공된) 도킹된 FOUP (4110) 에 있는 동안 일정하게 흐르는 버퍼 가스 환경에 의해 보호될 수도 있고, 그리고 또한 로봇 암 (4102) 및 엔드 이펙터 (4193) 에 의해 EFEM (4111) 을 통해 수송되는 동안 버퍼 가스 분배기 (4105) 를 통해 제공된 일정하게 흐르는 버퍼 가스의 층에 의해 보호될 수도 있다. 일부 이러한 구현예들에서, EFEM (4111) 은 또한 도 1 내지 도 5에 기술된 시스템들과 유사하게, 전체 EFEM (4111) 을 통해 버퍼 가스를 흘리기 위한 버퍼 가스 시스템을 구비할 수도 있다.
이러한 시스템들에서, EFEM (4111) 에 대한 버퍼 가스 시스템은 웨이퍼 (4104) 에 의해 트랜짓된 위치들에서, EFEM (4111) 버퍼 가스 환경 내의 설비 공기의 농도를 매우 저 레벨, 예를 들어, 100 ppm (parts per million) 으로 감소시킬 수도 있고, EFEM (4100) 내로의 다양한 누출 경로들에 기인하여, EFEM 버퍼 가스 분배 시스템을 사용하는 것보다 EFEM의 버퍼 가스 환경 내의 설비 공기의 농도를 보다 저 레벨로 감소시키는 것이 실현 불가능할 수도 있다. 그러나, EFEM 버퍼 가스 분배 시스템과 함께 버퍼 가스 분배기 (4105) 및 슬롯 도어 (4146) 중 하나 또는 양자를 사용함으로써, 웨이퍼들 (4104) 주위의 국부화된 환경은 웨이퍼들 (4104) 에 아주 가까운 부근에서의 설비 공기의 농도가 예를 들어, 10 ppm 또는 1 ppm으로 더 감소되도록 퍼지될 수도 있다. 일부 예들에서, 설비 공기의 이러한 저 농도 레벨들을 달성하는 것은, 단독으로 도 1 내지 도 5의 EFEM-레벨 버퍼 가스 분배 시스템들을 사용하거나 도 31 내지 도 40의 수평 슬롯 콘셉트들 및 도 7 내지 도 30의 버퍼 가스 분배기들을 사용하여, 조합하여 또는 개별적으로, 단독으로 실현 불가능할 수도 있다. 그러나, 이러한 결합된 방법 구현예들로 하여금 이러한 시너지 결합이 부재한 경우보다 저 설비 공기 ppm 레벨들을 달성하게 하는, 도 31 내지 도 40의 수평 슬롯 콘셉트들과 도 7 내지 도 30의 버퍼 가스 분배기들을 결합하여 도 1 내지 도 5에 대해 논의된 바와 같은 EFEM-레벨 버퍼 가스 분배 시스템들을 사용하는 것으로부터 조합하여 또는 개별적으로 시너지 효과가 있을 수도 있다. 이것은 본 명세서에서 논의된 방법들 또는 기법들이 사용되는 것에 상관없이, 웨이퍼에 도달할 수도 있는 "바람직하지 않은" 가스의 일부 양이 항상 있을 수도 있기 때문이다.
EFEM-레벨 버퍼 가스 분배 시스템의 경우에서, 전체 EFEM을 밀봉하여 시일링하는 것은 EFEM의 사이즈 및 그렇게 하는 것의 과도한 비용들에 기인하여 대체로 실현 불가능하거나 실행 불가능할 것이다. 그 결과, 심지어 버퍼 가스가 EFEM을 통해 흐를 때에도 EFEM의 내부 볼륨 내로 EFEM을 둘러싸는 주변 설비 공기로부터의 누출이 대체로 있을 것이다. 이러한 설비 공기는 버퍼 가스와 혼합될 수도 있고, 그리고 EFEM 내로의 설비 공기의 누출 레이트는, 누출 레이트가 EFEM 내로의 설비 공기 누출의 양을 더 감소시키도록 보다 타이트하게 시일링되는 훨씬 보다 고가의 그리고 비실용적인 EFEM 설계를 구현하지 않거나 훨씬 보다 많은 양의 버퍼 가스가 안전하게 폐기될 필요가 있을 수도 있기 때문에 엄청나게 고가일 수도 있고 안전 이슈들을 도입할 수도 있는, 버퍼 가스의 훨씬 보다 고 플로우 레이트를 사용하지 않고, EFEM 내의 설비 공기 농도의 목표된 최대 레벨을 획득하는 것이 어려울 수도 있도록 하는 레이트일 수도 있다.
유사하게, FOUP 내에 남아있거나 엔드 이펙터/로봇 암에 의해 수송될 웨이퍼들에 바로 인접한 영역들 내로의 버퍼 가스 분배기 및/또는 수평 슬롯 콘셉트를 둘러싸는 주변 공기 또는 가스의 누출이 또한 있을 수도 있다. 이러한 구현예들에서 웨이퍼들에 도달하는 주변 공기 또는 가스의 양이 버퍼 가스의 플로우 레이트를 증가시킴으로써 감소될 수도 있는 동안, 버퍼 가스의 플로우를 주변 공기 또는 가스의 목표된 농도 레벨을 달성하도록 필요한 레벨로 증가시키는 것이 실현 불가능하거나 실행 불가능할 수도 있다. 그렇게 하는 것은 예를 들어, 매우 비용이 많이 들거나 매우 위험한 버퍼 가스 플로우 레이트들을 수반할 수도 있다. 일부 경우들에서, 버퍼 가스의 플로우 레이트는 대체로 바람직하지 않을 수도 있는, 웨이퍼들의 진동들 또는 이동을 유발할 수도 있는 레벨로 증가될 필요가 있을 수도 있다.
그러나, EFEM 버퍼 가스 분배 시스템이 조합하여 또는 개별적으로, 도 31 내지 도 40의 수평 슬롯 콘셉트들 및 도 7 내지 도 30의 버퍼 가스 분배기들과 동시에 사용된다면, 그러면 EFEM 버퍼 가스 분배 시스템은 EFEM 내의 주변 환경 내의 설비 공기의 농도를, 조합하여 또는 개별적으로, 도 31 내지 도 40의 수평 슬롯 콘셉트들 및 도 7 내지 도 30의 버퍼 가스 분배기들에 의해 제공된 추가의 희석이 허용 가능한 레벨로 웨이퍼의 부근에서 설비 공기 농도 레벨을 감소시킬 수도 있는 이러한 낮은 양의 설비 공기가 EFEM 볼륨 내에 여전히 남아있고 그리고 웨이퍼에 도달하는 충분히 낮은 제 1 레벨로 감소시킬 수도 있다.
앞서 주지된 바와 같이, 로드 포트 유닛은 일 웨이퍼로 하여금 FOUP로부터 커버 플레이트 또는 도어를 통해 한 번에 추출되게 하도록 사이징되는 도어 내에 수평 슬롯을 가진 이동 가능한 커버 플레이트 또는 도어를 구비할 수도 있고; 커버 플레이트 또는 도어는 웨이퍼들로 하여금 FOUP 내의 상이한 슬롯 위치들로부터 추출되게 하도록 수직으로 이동될 수도 있다. 커버 플레이트 또는 도어는 실제로, FOUP의 개방된 부분의 대부분을 폐쇄할 수도 있고, 따라서 FOUP로부터 퍼지 가스의 플로우를 제한한다. 또한 로드 포트 유닛의 뒤에, 즉, 질소로 충진되는 폐쇄된 보호 볼륨을 제공하는, 커버 플레이트와 FOUP 사이에 개재된 인클로저 볼륨이 있을 수도 있다. 이 볼륨은 또한 로드 포트 도어 메커니즘이 폐쇄되거나 개방되었는지에 상관 없이, 로드 포트 도어 메커니즘을 커버할 수도 있다. 부가적으로, FOUP는 갭으로부터의 질소 플로우를 방지하도록 로드 포트 유닛의 정면 표면에 대해 시일링될 수도 있다. 실제로, 퍼지 가스는 슬롯을 통해 그리고 커버 플레이트와 FOUP 또는 인클로저 볼륨 사이의 갭을 통해서만 흐를 수도 있다 - 이 갭은 예를 들어, 약 1 또는 수 밀리미터일 수도 있다. 그러므로, 퍼지 가스가 FOUP를 떠나도록 흐를 수도 있는 단면적은, 퍼지 가스가 FOUP의 전체 개방된 부분에서, 즉, 웨이퍼들의 직경보다 넓고 그리고 FOUP 내의 웨이퍼들의 스택 높이보다 높은 개구를 통해 흐를 수도 있는 구현예들과 비교하여 슬롯 도어를 사용할 때 상당히 감소될 수도 있다.
웨이퍼 이송들이 발생하지 않을 때, 일부 구현예들에서, 커버 플레이트는 보다 저 질소 플로우가 사용될 수 있고 그리고 부가적인 웨이퍼 보호가 제공될 수도 있도록 슬롯이 (위 또는 아래로) 차단되는 위치로 이동할 능력을 가질 수도 있다.
도 42는 슬롯 도어가 없는 (슬롯 도어가 제거됨) 로드 포트 유닛 (4213) 을 도시하고; 보이는 바와 같이, 전체 웨이퍼 스택 (4207) 은 웨이퍼 스택의 높이보다 높이가 높고 그리고 웨이퍼 직경들의 폭보다 넓은 개구를 통해 동시에 액세스될 수도 있다. 질소 또는 다른 버퍼 가스가 로드 포트 유닛 (4213) 의 인터페이스 (4227) 상에 놓인 동안 질소 또는 다른 버퍼 가스가 FOUP (4210) 를 통해 흐른다면, 퍼지 가스는, EFEM으로부터 FOUP 내로의 백플로우를 방지하도록 FOUP 내의 충분히 높은 과압을 유지하기 위해서, 이 개구의 사이즈를 고려해볼 때, 고 체적 레이트로 공급될 필요가 있을 것이다.
도 43은 이 로드 포트 유닛 (4213) 이 병진 가능한 또는 이동 가능한 커버 플레이트/슬롯 도어 (4278) 를 구비한다는 것을 제외하고, 도 43과 동일한 로드 포트 유닛 (4213) 을 도시한다. 슬롯 도어 (4278) 는 웨이퍼 직경보다 넓은 폭인, 슬롯 도어 (4278) 내의 수평 슬롯 (4246) 을 가질 수도 있지만, 도 42의 개구와 대조적으로, 슬롯은 수직 방향에서 훨씬 보다 작을 수도 있다. 일부 구현예들에서, 슬롯은 웨이퍼 스택 내의 웨이퍼 사이의 간격과 대략 동일한 높이일 수도 있다. 도시된 구현예와 같은 다른 구현예들에서, 수평 슬롯 (4246) 은 수평 슬롯 (4246) 의 높이를 따라 2 이상의 상이한 높이들을 가질 수도 있다. 예를 들어, 수평 슬롯 (4246) 은 웨이퍼들이 FOUP 내로 삽입되거나 FOUP로부터 제거될 때 웨이퍼 간격을 허용하도록 사이징되지만 적어도 높이 간 웨이퍼 간격의 2 배보다 작은 제 1 높이 ("A"), 및 높이 "A"보다 높고, 예를 들어, 2 내지 3 배 또는 그 이상 높은 제 2 높이 "B"를 가질 수도 있고; 이 높이-높이 구역은 엔드 이펙터가 웨이퍼를 회수하거나 웨이퍼를 배치하게 FOUP 내로 도달하기 위해서 필요할 수도 있는 부가적인 간격을 허용하도록 사이징될 수도 있다 (엔드 이펙터 자체는 꽤 얇을 수도 있고, 예를 들어, 1 내지 2 ㎜일 수도 있지만, 엔드 이펙터는 상당히 보다 두꺼운 로봇 손목 관절 (wrist joint) 또는 다른 하드웨어와 연결될 수도 있음). 그러므로, 수평 슬롯의 중간 부분은 보다 낮은 높이들 ("A") 을 가질 수도 있는, 중간 부분의 양측 상의 플랭킹 부분들보다 높은 높이 ("B") 를 가질 수도 있다. 이러한 구현예들에서, "B" 높이 구역의 폭은 증가된-높이 영역에서 슬롯 도어를 통과할 수도 있는 엔드 이펙터 및/또는 로봇 암 컴포넌트들의 폭보다, 약간 크게, 예를 들어, 수 밀리미터 또는 그 이상 크게 사이징될 수도 있다. 이러한 가변-높이 수평 슬롯들은 본 명세서에서 논의된 수평 슬롯 콘셉트들 중 임의의 수평 슬롯 콘셉트에서 원한다면 사용될 수도 있다는 것이 이해된다. 일부 이러한 예들에서, 수평 슬롯의 중간 부분은 엔드 이펙터의 부가적인 두께를 수용하도록 플랭킹 부분들 아래로 연장할 수도 있지만, 그렇지 않으면 상단 에지를 따른플랭킹 부분들과 같은 높이일 수도 있다. 다른 구현예들에서, 중간 부분은 플랭킹 부분들 위로 연장할 수도 있지만, 플랭킹 부분들의 하단 에지와 같은 높이일 수도 있다. 그리고 또 다른 구현예들에서, 중간 부분은 플랭킹 부분들 위로 그리고 플랭킹 부분들 아래로 연장할 수도 있다. 슬롯 도어는 슬롯을 위 그리고 아래로 이동시키도록 로드 포트 유닛 내에서 수직으로 이동될 수도 있다.
도 44 및 도 45에 도시된 구현예들과 같이 일부 구현예들에서, 슬롯 도어 (4278) 는 수평 슬롯 (4246) 이 로드 포트 유닛 (4213) 의 정면 표면 (4297) 뒤로 숨겨지도록 아래로 (도 44) 또는 위로 (도 45) 이동될 수도 있어서, 가스 플로우에 대한 슬롯을 효과적으로 "폐쇄"한다 (일부 작은 누출이 여전히 발생할 수도 있지만, 슬롯을 통한 대량의 가스 플로우가 이러한 구성들에서 종결될 것이다). 사용 동안, 슬롯 도어 (4278) 는 슬롯이 3 개의 상이한 웨이퍼 위치들에 대해 도 46, 도 47, 및 도 48에 도시된 바와 같이, FOUP (4210) 내의 웨이퍼들 중 웨이퍼의 회수, 또는 웨이퍼의 배치를 허용하는 위치에 있도록 재위치될 수도 있다. 슬롯 도어 (4278) 는 볼 스크류, 공압식 액추에이터, 또는 유압식 액추에이터, 또는 다른 구동 메커니즘 (미도시) 과 같은 선형 액추에이터에 의해 로드 포트 유닛 내에서 수직으로 구동될 수도 있고; 구동 메커니즘은 예를 들어, (이들 간략한 도면들에 포함되지 않은) 이동식 FOUP 도어를 제거하기 위한 하드웨어 및 메커니즘들을 또한 둘러쌀 수도 있는 인클로저 볼륨 (4296) (도 44 참조) 내에 위치될 수도 있다.
본 명세서의 예들이 슬롯 도어 또는 유사한 슬롯 같은 구조체를 통해 한 번에 일 웨이퍼만을 회수 또는 삽입하기 위한 슬롯 도어 콘셉트들에 초점을 맞추지만, 이들 콘셉트들은 슬롯들이 슬롯 도어 또는 다른 슬롯 포함 구조체를 통해 한 번에 2 이상의 웨이퍼들의 삽입 또는 회수를 수용하도록 사이징되는 슬롯 콘셉트들로 확장될 수도 있다는 것이 이해된다. 이러한 경우들에서, 슬롯은 2, 3, 4, 또는 그 이상의 웨이퍼들을 한 번에 수용하도록 사이징될 수도 있지만, 슬롯은 항상 슬롯 도어 또는 유사한 슬롯 구조체를 가진 장치 내의 전체 웨이퍼 스택이 슬롯을 통해 동시에 삽입되거나 회수되지 않을 수 있게 충분히 작을 것이다.
슬롯 도어 기술은, 웨이퍼 핸들링 로봇 또는 다른 타입의 웨이퍼 핸들링 디바이스로 하여금 개별적으로 또는 핸들링 장비 내의 웨이퍼들의 전체 수 미만인 수들로 이들 웨이퍼들과 상호작용하게 하는 동안, 복수의 웨이퍼들을 동시에 포함할 수도 있는 다양한 상이한 타입들의 반도체 웨이퍼 핸들링 장비를 사용하여 사용될 수도 있다. FOUP들이 이러한 멀티-웨이퍼 저장 시스템들의 일 예이지만, 이러한 구현예들의 다른 예들이 이하에 또는 이 개시의 다른 부분에 기술된다. 예를 들어, 웨이퍼 얼라이너들 (본 명세서에 보다 상세히 논의된 바와 같음), 로드-록들 (본 명세서에 보다 상세히 논의된 바와 같음), 계측 스테이션들, 버퍼 스테이션들 (본 명세서에 보다 상세히 논의된 바와 같음), 로드 포트들 (본 명세서에 보다 상세히 논의된 바와 같음), 입자 제거기들, 웨이퍼 터널들, 등을 가진 슬롯 도어 콘셉트가 사용될 수도 있다. 일반적으로, 본 명세서에 논의된 슬롯 도어 콘셉트들은 대기 조건들에 있는 인접한 환경과 버퍼 가스 환경에서 홀딩된 임의의 멀티-웨이퍼 저장 영역 또는 컴포넌트 사이의 분할에 사용될 수도 있다.
도 49 내지 도 53에 도시된 또 다른 구현예에서, 슬롯 도어는 웨이퍼 버퍼와 함께 사용될 수도 있다. 웨이퍼 버퍼는 예를 들어, (EFEM 외부의 인터페이스 상에 지지되는 FOUP와 비교할 때) EFEM 내의 인터페이스 상에 지지될 수도 있고, 그리고 프로세싱 스테이지들 사이에서 특정한 조건들 하에서 웨이퍼들을 일시적으로 저장하도록 사용될 수도 있다. 웨이퍼 버퍼는 예를 들어, 가열될 수도 있고, 그리고 산화 또는 다른 타입들의 손상으로부터 버퍼 내에 위치된 웨이퍼들을 보호하도록 퍼지 가스 또는 불활성 가스가 공급될 수도 있다. 많은 면들에서, 도 49 내지 도 53의 웨이퍼 버퍼 구현예는 이 명세서에서 앞서 논의된 슬롯 도어 FOUP 로드 포트 구현예들과 유사할 수도 있지만, 웨이퍼 버퍼는 통상적으로 FOUP의 경우에서와 같이, 제거를 요구하는 임의의 도어를 갖지 않을 수도 있다.
도 49 내지 도 53에 도시된 바와 같이, 웨이퍼 버퍼 (4928) 는 수직 방향으로 위 그리고 아래로 슬롯 도어 (4978) 를 이동시키기 위한 선형 액추에이터 또는 구동 메커니즘 (4958) 을 포함할 수도 있는 인터페이스 (4927) 상에 놓일 수도 있다. 슬롯 도어 (4978) 내의 수평 슬롯 (4946) 은, 선형 액추에이터 위치 (도 52 참조) 에서 웨이퍼 버퍼 (4928) 내의 가장 낮은 웨이퍼 위치와 정렬하고 그리고 또 다른 선형 액추에이터 위치 (도 50 참조) 에서 버퍼 내의 가장 높은 웨이퍼 위치와 정렬하도록 위치될 수도 있다. 동시에, 슬롯 도어 (4978) 자체는 슬롯 도어 (4978) 가 수평 슬롯 (4946) 이 있는 위치에 상관없이 웨이퍼 버퍼 (4928) 의 정면을 폐쇄하기에 충분히 클 수도 있다. 그러므로, 이전의 슬롯 도어 구현예들에서와 같이, 웨이퍼 버퍼 (4928) 를 통해 흐르는 버퍼 가스, 예를 들어, 퍼지 가스 또는 불활성 가스는 슬롯 도어 (4978) 와 웨이퍼 버퍼 (4928) 하우징 사이를 나갈 수도 있는 갭을 통해 또는 수평 슬롯 (4946) 을 통해 웨이퍼 버퍼 (4928) 를 나갈 수도 있다. 이 갭은 꽤 작을 수도 있고, 예를 들어, 약 수 밀리미터일 수도 있기 때문에, 버퍼 가스를 탈출하기 위해 이용 가능한 단면 플로우 영역은 전체적으로 웨이퍼 버퍼 (4928) 개구의 단면 플로우 영역과 비교할 때 꽤 작다.
도 53은 도 49 내지 도 52의 웨이퍼 버퍼 (4928) 의 부분의 측면도를 도시한다. 보이는 바와 같이, 웨이퍼 버퍼 (4928) 는 대응하는 웨이퍼 지지 피처 (4909) 상에 각각 지지되는 웨이퍼들 (4904) 의 어레이를 지지하고; 이들 웨이퍼 지지 피처들, 또는 이들 웨이퍼 지지 피처들과 유사한 웨이퍼 지지 피처들이 또한 본 명세서에서 논의된 다른 멀티-웨이퍼 저장 시스템들에서 사용될 수도 있다.
슬롯 도어가 사용될 수도 있는 또 다른 구현예는 웨이퍼 얼라이너이다. 웨이퍼 얼라이너는 각 배향이 목표되는 또 다른 스테이션으로의 수송을 위해 웨이퍼를 로봇 암이 픽업한 후에 웨이퍼가 목표된 배향으로 정렬되도록 웨이퍼를 회전할 수 있는 턴테이블 (turntable) 을 가진 디바이스이다. 일부 웨이퍼 얼라이너들에서, 공간이 부가적인 웨이퍼를 저장하거나 버퍼링하도록 웨이퍼 얼라이너 위에 제공될 수도 있다. 도 69 내지 도 72는 이러한 웨이퍼 얼라이너의 예를 도시한다.
도 69 내지 도 72에서, 버퍼 스테이션을 가진 웨이퍼 얼라이너 (69104) 가 도시된다. 웨이퍼 얼라이너 (69104) 는 웨이퍼 얼라이너의 내부 볼륨 내에 얼라이너 턴테이블 (69108) 을 포함할 수도 있고; 얼라이너 턴테이블 (69108) 은 얼라이너 턴테이블 (69108) 의 중심 축을 중심으로 회전하고 그리고 중심 축을 따라, 예를 들어, 수직으로 병진할 수도 있다. 리프트 핀들 (69107) 의 패턴이 턴테이블 회전 인벨롭 (envelope) 보다 큰 직경을 가진 원형인 어레이로 배열될 수도 있다. 로봇 엔드 이펙터 (미도시) 는 얼라이너 턴테이블 (69108) 이 리프트 핀들 (69107) 의 레벨 아래의 위치로 하강되는 동안 리프트 핀들 (69107) 상에 웨이퍼 (6904) 를 놓을 수도 있다. 로봇 엔드 이펙터가 철수된 후에, 얼라이너 턴테이블 (69108) 은 리프트 핀들 (69107) 로부터 웨이퍼 (6904) 를 픽업하도록 상승될 수도 있다. 웨이퍼 (6904) 가 리프트 핀들 (69107) 에서 제거된다면, 얼라이너 턴테이블 (69108) 은 웨이퍼 (6904) 의 목표된 각 정렬을 달성하도록 회전될 수도 있다. 웨이퍼 (6904) 가 정렬된다면, 웨이퍼 (6904) 는 얼라이너 턴테이블 (69108) 에 의해 더 리프팅될 수도 있다. 이러한 동작 전에, 도시된 철수 가능한 지지부들 (69106) 은 웨이퍼 (6904) 로 하여금 충돌들 없이 철수 가능한 지지부들 (69106) 옆을 지나가게 하도록 각각의 지지 액추에이터들 (69105) 을 향하여 철수될 수도 있다. 얼라이너 턴테이블 (69108) 이 철수 가능한 지지부들 (69106) 보다 높게 웨이퍼 (6904) 를 상승시킨 후에, 철수 가능한 지지부들 (69106) 이 얼라이너 턴테이블 (69108) 이 그 후에 하강될 때 아래로부터 웨이퍼 (6904) 를 지지할 수도 있도록 철수 가능한 지지부들 (69106) 은 웨이퍼 (6904) 를 향하여 연장될 수도 있다. 철수 가능한 지지부들 (69106) 이 적절한 연장된 구성에 있다면, 얼라이너 턴테이블 (69108) 은 보다 저 위치로 복귀될 수도 있고, 이에 따라 철수 가능한 지지부들 (69106) 상에 웨이퍼 (6904) 를 남긴다. 이어서 로봇 엔드 이펙터 (또는 또 다른 로봇으로부터의 유사한 엔드 이펙터) 는 웨이퍼 (6904) 로 하여금 철수 가능한 지지부들 (69106) 에서 리프팅되고 그리고 얼라이너 (69104) 로부터 철수되게 하도록 웨이퍼 (6904) 밑에서 슬라이딩될 수도 있다. 일 웨이퍼 (6904) 는 다른 웨이퍼 (6904') 가 철수 가능한 지지부들 (69106) 에 의해 지지되는 동안 정렬될 수도 있다는 것이 이해된다. 또한 각각 철수 가능한 지지부들 (69106) 의 자체 세트를 가진, 웨이퍼 저장부의 복수의 레벨들이 이러한 얼라이너 (69104) 에 포함될 수도 있다는 것이 이해된다.
일부 구현예들에서, 얼라이너 턴테이블은 또한 회전하여 정렬된 웨이퍼 (6904) 로 하여금 또한 X 방향과 Y 방향으로 정렬되게, 즉, 중심이 위치되게 하기 위해서 2 개의 축들로 수평으로 병진시키도록 구성될 수도 있다. 일부 대안적인 이러한 구현예들에서, 얼라이너 턴테이블 (69108) 은 병진하지 않을 수도 있지만, 철수 가능한 지지부들 (69106) 은 이러한 이동을 할 수도 있고 그리고 이러한 중심 위치시킴은 웨이퍼 (6904) 가 철수 가능한 지지부들 (69106) 에 의해 지지되는 동안 웨이퍼 (6904) 상에서 수행될 수도 있다.
리드가 얼라이너 (69104) 상에 있을 때, 얼라이너 (69104) 는 로봇을 향하는 부분에서 이격된, 크게 시일링된 내부 볼륨을 가질 수도 있다. 이 구현예에서, 이 부분은 단일의 웨이퍼 (6904) 로 하여금 웨이퍼 얼라이너 (69104) 내에 삽입되거나 웨이퍼 얼라이너 (69104) 로부터 철수되게 하는, 본 명세서에서 논의된 다른 슬롯 도어 구현예들에 대해 상기에 기술된 수평 슬롯들과 유사한, 수평 슬롯 (6946) 을 가진 도어 (6978) 뒤로 대체로 폐쇄된다. 그러므로, 버퍼 가스가 버퍼 가스를 사용하여 웨이퍼 얼라이너 (69104) 를 약간 과압화하도록 그리고 이에 따라 내부에 있는 웨이퍼들 (6904) 을 보호하도록 웨이퍼 얼라이너 (69104) 내로 도입된다면, 과압화를 유지하도록 필요한 버퍼 가스 플로우의 레벨이 개방된 정면을 가진 구현예에서 필요한 레벨보다 상당히 낮을 수도 있다.
도 70에서 보이는 바와 같이, 도어 (6978) 는, 웨이퍼 (6904) 가 웨이퍼 얼라이너 (69104) 의 하부 부분 내로 삽입되거나 하부 부분으로부터 철수될 때 수평 슬롯 (6946) 이 리프트 핀들 (69107) 의 웨이퍼 지지면과 정렬되도록 하강될 수도 있다. 도 71에서, 도어 (6978) 는 철수 가능한 지지부들 (69106) 의 웨이퍼 지지면과 수평 슬롯 (6946) 을 정렬하도록 상승되고 - 이것은 웨이퍼 (6904) 로 하여금 웨이퍼 얼라이너 (69104) 의 상부 위치들 내에 삽입되거나 상부 위치들로부터 철수되게 할 수도 있다. 도 72에서, 도어 (6978) 는 수평 슬롯 (6946) 이 리드와 오버랩하도록 더 상승되고 - 이 포지셔닝은 웨이퍼 얼라이너 (69104) 에서 가스 플로우 경로의 단면적을 더 감소시키도록 사용될 수도 있고, 웨이퍼 얼라이너 (69104) 내에 목표된 과압화 환경을 여전히 유지하면서 감소된 퍼지 가스 플로우 레이트를 허용한다.
또 다른 구현예에서, 웨이퍼들이 개별적으로 로딩되거나 언로딩될 수도 있는 멀티-웨이퍼 로드-록을 가진 슬롯 도어가 사용될 수도 있다. 도 73은 로드-록 (9629) 의 대기/제조 설비 측면 상의 도어 (9678) 를 구비한 2-웨이퍼 로드-록 (9629) 의 예를 도시하고; 도어는 도어 내에 수평 슬롯 (9646) 을 가질 수도 있고 그리고 본 명세서에서 논의된 다른 슬롯 도어 콘셉트들에 대한 구성과 유사할 수도 있다. 도 73에서, 로드-록 (9629) 은 이 경우에, 2 개의 웨이퍼들 (9604) 을 지지하기 위한 내부의 웨이퍼 지지 피처들 (미도시) 을 가질 수도 있다. 로드-록 (9629) 은 로드-록 챔버의 반대편의 단부들에 위치된 다른 밀봉하여-시일링된 도어들 또는 게이트 밸브들 (96109) 을 가질 수도 있다. 게이트 밸브들 (96109) 의 게이트들 (96110) 은 각각 폐쇄된 위치와 개방된 위치 사이에서 동작 가능할 수도 있고; 폐쇄된 위치들에서, 게이트들 (96110) 은 로드-록 (9629) 챔버 볼륨을 밀봉하여 시일링할 수도 있고, 로드-록 챔버로 하여금 진공 펌프 (미도시) 에 의해 진공으로 펌핑 다운되게 한다. 로드-록 챔버가 충분히 저압 환경에 도달할 때, 프로세싱 환경 게이트 밸브 (96109) 는 개방될 수도 있고, 그리고 웨이퍼 핸들링 로봇은 로드-록으로부터 웨이퍼(들) (9604) 를 제거할 수도 있다.
로드-록 (9629) 의 대기/팹 (fab) 측면으로부터, 로드-록 (9629) 으로부터 웨이퍼들을 제거하거나 로드-록 (9629) 내로 웨이퍼들을 삽입하도록, 로드-록 (9629) 은 버퍼 가스를 로드-록 (9629) 내로, 예를 들어, 도시된 버퍼 가스 유입부 (9689) 를 통해 흘림으로써 대기압 조건들과 먼저 평형화될 수도 있다. 이러한 평형 없이, 대기-측면 게이트 밸브 (96109) 를 개방하는 것은 어려울 수도 있고 (또는 이러한 밸브는 압력 차에 기인하여 손상될 수도 있음), 그리고 대기-측면 게이트 밸브 (96109) 가 개방된다면, 로드-록 (9629) 의 내부의 보다 저압은 대기 공기로 하여금 로드-록 챔버 내로 인출되게 할 수도 있고, 이는 웨이퍼들 (9604) 을 오염시킬 수도 있다. 버퍼 가스를 사용하여 제조 설비의 대기압과 로드-록 챔버 압력을 평등화함으로써, 이러한 바람직하지 않은 효과들이 방지된다. 압력이 평형화된다면, 대기 게이트 밸브 (96109) 가 개방될 수도 있다. 버퍼 가스는 대기-측면 게이트 밸브 (96109) 가 개방되는 동안 로드-록 (9629) 내로 계속 흐를 수도 있고 - 이 플로우를 유지함으로써, 로드-록 챔버는 주변 대기압에 대해 약간 과압화될 수도 있고, 이에 따라 대기 공기가 로드-록 챔버 내로 흐르는 것을 방지하고, 여기서 이것은 웨이퍼들을 잠재적으로 오염시킬 수도 있다.
이 약간의 과압화를 유지하도록 필요한 버퍼 가스 플로우의 양을 감소시키도록, 로드-록 (9629) 은 수평 슬롯 (9646) 을 가진 도어 (9678) 를 구비할 수도 있다. 보이는 바와 같이, 도어 (9678) 는 웨이퍼들 (9604) 로 하여금 한 번에 1회 로드-록 (9629) 으로부터 철수되거나 로드-록 (9629) 내로 삽입되게 하도록 충분히 큰 수평 슬롯 (9646) 을 가질 수도 있다. 그러나, 도어 (9678) 는 또한 로드-록 챔버에서의 버퍼 가스의 플로우의 대부분을 차단하도록 충분히 크다. 다시, 도어 (9678) 와 로드-록 챔버 사이의 물리적 콘택트 (따라서 잠재적인 미립자 생성) 이 감소되거나 최소화되도록 도어 (9678) 와 로드-록 챔버 사이에 작은 갭이 존재할 수도 있다. 도어 (9678) 는 목표된 웨이퍼 (9604) 로 하여금 로드-록 챔버 내로 삽입되거나 로드-록 챔버로부터 제거되게 하도록 원하는 대로 수평 슬롯 (9646) 을 위치시키기 위해서, 일 웨이퍼 (9604) 또는 다른 웨이퍼와 대응하는 위치들 사이에서 수직으로 이동될 수도 있다.
일부 예들에서 고정된 수평 슬롯 또는 슬롯들을 가진 유사한 구현예가 사용될 수도 있다는 것이 이해된다. 예를 들어, 웨이퍼들에 의해 횡단되는 웨이퍼 이송 통로들 또는 다른 루트들을 폐쇄하기 위해 반도체 프로세싱 툴들에서 공동으로 사용되는 게이트 또는 슬릿 밸브들이 밸브 제작사들로부터 보통 구입되고, 그리고 이러한 밸브들의 선택은 다소 제한될 수도 있다. 따라서, 매우 작은 수직 간격, 예를 들어, 밸브를 통과하는 웨이퍼의 최대 단면적 주위의 2.5 ㎜ 간격을 가진 슬릿 밸브 또는 게이트 밸브를 획득하는 것은, 이러한 작은-어퍼처 슬릿 밸브들이 상업적으로 입수할 수도 없기 때문에 실현 불가능할 수도 있다. 그러나, 본 명세서에서 앞서 기술된 바와 같이, 수평 슬롯을 가진 고정된 플레이트를 정면 또는 뒤에 배치함으로써, 슬릿 또는 게이트 밸브는 슬릿 또는 게이트 밸브가 단독으로 할 수 있는 정도보다 보다 큰 정도로 로드-록으로부터의 버퍼 가스의 플로우를 제한할 수도 있다.
비-
EFEM
환경들에서의 사용
본 발명자들의 일부 또는 모두는 EFEM이 없는 반도체 프로세싱 툴들의 맥락에서, 본 명세서에서 논의된 하나 이상의 버퍼 가스 마이크로클라이메이트 시스템들, 예를 들어, 수평 슬롯 콘셉트들 및/또는 버퍼 가스 분배기들과 같은 시스템들을 구현하는 것을 생각하였다. 이러한 시스템들은 반도체 웨이퍼들이 EFEM 또는 FOUP의 보호 외에서 긴 거리들을 트랜짓할 수도 있는 매우 큰, 멀티-스테이션 반도체 프로세싱 툴들의 맥락에서 특히 유용하지 않을 수도 있다. 전반적인 버퍼 가스 분배 시스템 (EFEM에 대해 도 1 내지 도 5에 도시된 것과 유사함) 을 구현하는 것이 인클로저 내의 설비 공기의 바람직하게 저 농도들을 달성하도록 인클로저를 통해 흐를 버퍼 가스의 대량들을 요구하기 때문에, 웨이퍼 이송 영역 주위에 인클로저를 갖는 이러한 툴들의 내부 볼륨이 커야하기 때문에 이러한 큰, 멀티-스테이션 반도체 프로세싱 툴들의 이러한 예들이 커야할 수도 있고; 이러한 버퍼 가스 플로우들은 앞서 논의된 바와 같이, 심각한 비용 및/또는 안전 이슈들을 제시할 것이다.
그러나, 이러한 반도체 프로세싱 툴의 전체 웨이퍼 이송 볼륨을 통해 버퍼 가스를 흘리는 것이 실현 불가능할지라도, 이러한 반도체 프로세싱 툴에 의해 핸들링되는 웨이퍼들은 본 명세서에서 논의된 하나 이상의 다양한 버퍼 가스 마이크로클라이메이트 시스템들의 사용을 통해 여전히 유익하게 보호될 수도 있다.
큰, 멀티-스테이션 반도체 프로세싱 툴의 일 예는 멀티-스테이션 클리너 또는 세정 툴이다. 이러한 툴에서, 복수의 반도체 프로세싱 챔버들, 예를 들어, 세정 챔버들은 3-차원 공간에서 상이한 위치들에 위치될 수도 있다. 일부 종류의 섀시 또는 프레임워크 (framework) 는 상이한 위치들에서 반도체 프로세싱 챔버들을 지지할 수도 있고; 이 섀시 또는 프레임워크는 스페이스프레임 (spaceframe) 구성일 수도 있고, 그리고 섀시 또는 프레임워크를 둘러싸는 패널 또는 벽들을 갖거나 갖지 않을 수도 있다.
도 54에서, 멀티-스테이션 세정 툴의 측면도가 도시된다. 멀티-스테이션 세정 툴은 선형 액추에이터 또는 드라이브, 예컨대, 볼 스크류에 의해 구동된 수평 컨베이어 시스템 (5480), 예컨대, 트랙들, 컨베이어 벨트, 또는 플랫폼들을 포함하는 베이스를 가질 수도 있고, 그리고 수직 컨베이어들 (5484) 로서 작용하도록 그 길이를 따라 다양한 위치들에 위치된 수직 리프트 트랙들 또는 액추에이터들을 가질 수도 있다. 또한 복수의 프로세스 챔버들 (5474), 예를 들어, 베이스의 장축을 따라 위치된 세정 스테이션들 (5474A 내지 5474) 이 있을 수도 있다. 이러한 프로세스 챔버들 (5474) 은 일부 구현예들에서, 도 54에 도시된 바와 같이, 상이한 높이들로 2 이상의 수평면들에 배열될 수도 있다. 프로세스 챔버 (5474) 각각은 프로세싱 전에, 또는 프로세싱된 웨이퍼 (5404) 가 프로세싱 후 프로세스 챔버 (5474) 로부터 제거될 수도 있는 내내, 웨이퍼 (5404) 를 수용하도록 구성된 웨이퍼 로드 슬롯 또는 포트 (5494) 또는 다른 인터페이스를 가질 수도 있다.
웨이퍼들 (5404) 은 멀티-웨이퍼 포드들 또는 카세트들 (5473) 을 사용하여, 그룹들, 예를 들어, 5 개 또는 10 개의 그룹들로 툴을 통해 수송될 수도 있다. 도 55는 멀티-웨이퍼 카세트 (5473) 의 측면도를 도시한다. 이들 멀티-웨이퍼 카세트들 또는 포드들 (5473) 은 적층된, 이격된 배열 (5407) 의 웨이퍼들 (5404) 을 지지할 수도 있는 하우징 (5498) 내에 예를 들어, 복수의 레지들 또는 다른 웨이퍼 지지 피처들 (5409) 을 가진 하우징 (5498) 을 포함할 수도 있다. 멀티-웨이퍼 카세트 또는 포드 (5473) 각각은 멀티-웨이퍼 카세트 또는 포드 (5473) 의 개방된 단부 또는 단부들, 예컨대, 정면 개구 (5476) 및 후면 개구 (5477) 를 폐쇄하는, 하나 이상의 슬롯 도어들 (5478), 즉, 수평 슬롯 (5446) 을 포함하는 슬라이딩 도어 (5478) 를 가질 수도 있다. 슬롯 도어들 (5478) 은 멀티-웨이퍼 포드 또는 카세트 (5473) 내의 웨이퍼 지지 위치들 중 임의의 웨이퍼 지지 위치들과 대응하는 위치들에 수평 슬롯 (5446) 을 배치하도록 슬롯 도어들 (5478) 을 수직으로 슬라이딩하기 위해서 구성된 슬롯 도어 액추에이터들 또는 구동 메커니즘들 (5479) 과 연결될 수도 있다. 슬롯 도어들 (5478) 및 슬롯 도어들 (5478) 의 수반하는 구동 메커니즘들 (5479) 은 본 명세서에서 슬롯 도어 메커니즘들로서 지칭될 수도 있다. 일부 구현예들에서, 슬롯 도어 액추에이터는 또한 슬롯 도어 액추에이터를 작동시키도록 사용될 수도 있는 모터 또는 다른 구동 시스템을 포함할 수도 있다. 다른 구현예들에서, 멀티-웨이퍼 포드 또는 카세트 (5473) 가 특정한 위치 또는 위치들에 배치될 때 모터 또는 다른 구동 시스템이 툴 내에 위치될 수도 있고 그리고 슬롯 도어 액추에이터와 기계적으로 인터페이싱할 수도 있다. 이러한 구현예들에서, 구동 모터 또는 모터들은 멀티-웨이퍼 포드 또는 카세트 (5473) 각각과 함께 이동하지 못할 것이지만, 대신에 멀티-웨이퍼 카세트들 (5473) 을 수직으로 리프팅하도록 멀티-웨이퍼 카세트들 (5473) 에 부착되는 수직 컨베이어들 (5484) 의 인터페이스들과 같은 다른 컴포넌트들에 부착되거나 제자리에 고정될 것이다. 보이는 바와 같이, 슬롯 도어 (5478) 내의 수평 슬롯 (5446) 은 멀티-웨이퍼 포드 또는 카세트 (5473) 내의 웨이퍼 위치들 중 임의의 웨이퍼 위치의 정면에 위치되도록 구동될 수도 있다 (우측의 슬롯 도어 (5478) 는 가장 낮은 웨이퍼 위치에 액세스하도록 위치됨). 일부 구현예들에서, 슬롯 도어 (5478) 는 수평 슬롯 (5446) 이 예를 들어, 도 55에서 좌측의 슬롯 도어 (5478) 로 도시된 바와 같이, 웨이퍼 위치들 중 임의의 웨이퍼 위치와 오버랩하도록 또한 구동될 수도 있다. 이 경우에, 버퍼 가스 누출의 양은 훨씬 더 감소될 수도 있고 - 이러한 포지셔닝은 멀티-웨이퍼 포드 또는 카세트 (5473) 가 멀티-웨이퍼 포드 또는 카세트 (5473) 로부터의 웨이퍼들 (5404) 의 제거 또는 멀티-웨이퍼 포드 또는 카세트 (5473) 내로의 웨이퍼들 (5404) 의 삽입 없이 툴 내의 상이한 위치들 사이에서 수송될 때의 상황들에서 특히 유용할 수도 있다.
슬롯 도어들 (5478) 은 일반적으로 슬롯 도어들의 비-슬롯 부분들이 슬롯 도어들을 향하는 포드 또는 카세트의 개방된 단부들을 폐쇄하는 것을 보장하도록 포드 또는 카세트 내에서 웨이퍼 스택 (5407) 높이만큼 적어도 2 배 길거나 높을 수도 있다. 예를 들어, 웨이퍼 스택 (5407) 내의 N 개의 웨이퍼들 (5404) 이 있고 그리고 웨이퍼들 (또는 웨이퍼들을 지지하는 웨이퍼 지지부들 (5409)) 이 평균 거리 d만큼 웨이퍼 스택 (5407) 내의 임의의 이웃한 웨이퍼들 (5404) 로부터 이격된다면, 슬롯 도어 (5478) 는 (2 N - 1)
N - 1) d보다 긴 (수직 축을 따른) 높이를 가질 수도 있다. 이에 대응하여, 수평 슬롯 (5446) 은 최소로 (N - 1)
d보다 긴 (수직 축을 따른) 높이를 가질 수도 있다. 이에 대응하여, 수평 슬롯 (5446) 은 최소로 (N - 1) d 미만인 높이를 가질 수도 있고; 대부분의 구현예들에서, 수평 슬롯은 적어도 2
d 미만인 높이를 가질 수도 있고; 대부분의 구현예들에서, 수평 슬롯은 적어도 2 d 이하 또는 d 이하의 수평 슬롯의 중간 부분을 플랭킹하는 수평 슬롯의 부분들에서 높이를 가질 수도 있다. 예를 들어, 수평 슬롯은 통과할 웨이퍼 단독에 대한 충분한 간격이 있을 수도 있는, 중간 부분을 플랭킹하는 부분들에서 대략 5 ㎜의 높이를 가질 수도 있고 - 중간 부분은 수평 슬롯을 통과하는 엔드 이펙터/로봇 암의 상부 표면과 하부 표면으로부터 ± 2.5 ㎜의 간격을 가질 수도 있다. 슬롯 도어 (5478) 각각은 실질적으로 개구를 폐쇄하도록, 개구들 중 일 개구, 예를 들어, 정면 개구 (5476) 또는 후면 개구 (5477) 의 정면에 위치될 수도 있다. 이 가이던스는 일반적으로 본 명세서에서 논의된 모든 슬롯 도어 구현예들에 적용된다.
d 이하 또는 d 이하의 수평 슬롯의 중간 부분을 플랭킹하는 수평 슬롯의 부분들에서 높이를 가질 수도 있다. 예를 들어, 수평 슬롯은 통과할 웨이퍼 단독에 대한 충분한 간격이 있을 수도 있는, 중간 부분을 플랭킹하는 부분들에서 대략 5 ㎜의 높이를 가질 수도 있고 - 중간 부분은 수평 슬롯을 통과하는 엔드 이펙터/로봇 암의 상부 표면과 하부 표면으로부터 ± 2.5 ㎜의 간격을 가질 수도 있다. 슬롯 도어 (5478) 각각은 실질적으로 개구를 폐쇄하도록, 개구들 중 일 개구, 예를 들어, 정면 개구 (5476) 또는 후면 개구 (5477) 의 정면에 위치될 수도 있다. 이 가이던스는 일반적으로 본 명세서에서 논의된 모든 슬롯 도어 구현예들에 적용된다.
그러므로, 버퍼 가스가 포드 또는 카세트의 내부 내로 도입된다면, 버퍼 가스의 대부분 또는 전부는 좁은 수평 슬롯 (5446) 을 통해 흐름으로써 또는 슬롯 도어 (5478) 자체의 에지들 주위를 흐름으로써 포드 또는 카세트로부터 탈출할 것이다. 여전히 웨이퍼들로 하여금 로봇 암 (5402) 을 사용하여 멀티-웨이퍼 포드 또는 카세트 (5473) 내로 삽입되고 멀티-웨이퍼 포드 또는 카세트 (5473) 로부터 철수되게 하는 동안, 수평 슬롯 (5446) 이 웨이퍼 (5404) 의 직경보다 단지 약간 넓게 사이징될 뿐만 아니라, 슬롯 높이를 최소 또는 거의 최소로 감소시키도록 수직으로 사이징될 수도 있기 때문에, 수평 슬롯 (5446) 의 단면적은 포드 또는 카세트 개구, 예를 들어, 정면 개구 (5476) 또는 후면 개구 (5477) 의 단면적보다 상당히 작을 수도 있다. 로봇 암들 (5402), 예를 들어, 로봇 암들 (5402A 및 5402B) 은, 멀티-웨이퍼 카세트들 (5473) 이 수직 높이에 있던 간에 멀티-웨이퍼 카세트들 (5473) 에 위 그리고 아래로 액세스하기 위해서 로봇 암들 (5402) 을 이동시키도록 사용될 수도 있는, 수직 로봇 컨베이어들 (5491), 예를 들어, 수직 로봇 컨베이어들 (5491A 및 5491B) 에 장착될 수도 있다. 본 명세서에서 논의된 다양한 다른 구현예들을 사용함에 따라, 슬롯 도어 (5478) 는 작동 간격을 제공하도록 1 또는 수 밀리미터의 갭 (5499) 만큼 멀티-웨이퍼 포드 또는 카세트 (5473) 로부터 오프셋될 수도 있고, 이에 따라 임의의 (또는 감소된 수의) 대면 표면들에 대해 러빙하지 않고 슬롯 도어 (5478) 로 하여금 수직으로 병진하게 한다. 이것은 미립자 오염에 대한 가능성을 감소시키지만, 동시에, 멀티-웨이퍼 포드 또는 카세트 (5473) 내로 흐르는 버퍼 가스에 대한 또 다른 누출 경로를 제공한다. 이것에도 불구하고, 수평 슬롯 (5446) 및 갭 (5499) 을 통해 흐르는 버퍼 가스의 양은 여전히 버퍼 가스가 슬롯 도어 (5478) 에 의해 폐쇄되는 전체 개구를 통해 흐르는 경우보다 작을 것이다. 이것은 보다 저 저 플로우 레이트의 버퍼 가스가 사용되게 하고, 이는 필요한 버퍼 가스의 양을 감소시키고 - 이것은 보다 큰 플로우 레이트들의 버퍼 가스가 사용되는 경우보다 경제적이고, 보다 조용하고, 보다 안전하다.
복수의 멀티-웨이퍼 카세트들 또는 포드들 (5473) 이 툴 내에 동시에 하우징될 수도 있고, 그리고 각각은 수직 컨베이어들 (5484) 의 상이한 위치들로 독립적으로 이동될 수도 있고, 그리고 또한 멀티-웨이퍼 포드들 또는 카세트들 (5473) 로 하여금 상이한 수직 컨베이어들에 재위치되게 하도록 수평 방향으로 독립적으로 이동될 수도 있다. 멀티-웨이퍼 카세트 또는 포드 (5473) 각각 내의 웨이퍼들 (5404) 은 멀티-웨이퍼 카세트 또는 포드 (5473) 내부로 도달하거나 웨이퍼 (5404) 를 철수시키거나 웨이퍼 (5404) 를 배치시킬 수도 있는 엔드 이펙터 (5493) 를 가질 수도 있는 웨이퍼 핸들링 로봇 또는 로봇 암 (5402) 에 의해 멀티-웨이퍼 카세트들 또는 포드들 (5473) 로부터 제거될 수도 있다 (또는 멀티-웨이퍼 카세트들 또는 포드들 (5473) 내로 배치됨). 로봇 암들 (5402) 은 또한 웨이퍼들 (5404) 을 프로세스 챔버들 (5474) 내로 배치하거나 프로세스 챔버들 (5474) 로부터 제거하도록 구성될 수도 있다. 일부 구현예들에서, 웨이퍼 핸들링 로봇 또는 로봇 암 (5402) 은 웨이퍼들 (5404) 을 웨이퍼 핸들링 로봇 또는 로봇 암 (5402) 의 양측 상의 멀티-웨이퍼 포드들 또는 카세트들 (5473) 로부터 제거하거나 멀티-웨이퍼 포드들 또는 카세트들 (5473) 내로 배치하도록 구비될 수도 있고; 이러한 경우들에서, 멀티-웨이퍼 포드들 또는 카세트들 (5473) 은 정면 개구 (5476) 및 후면 개구 (5477) 양자, 뿐만 아니라 각각의 이러한 개구를 위한 슬롯 도어 메커니즘들을 가질 수도 있다. 웨이퍼들 (5404) 이 단지 멀티-웨이퍼 카세트들 (5473) 의 일 측면으로부터 멀티-웨이퍼 카세트들 (5473) 로부터 철수되거나 멀티-웨이퍼 카세트들 (5473) 내로 배치되는 다른 구현예들에서, 각각의 멀티-웨이퍼 카세트 (5473) 에 대한 단 하나의 개구 및 단 하나의 대응하는 슬롯 도어 메커니즘이 있을 수도 있다.
보이는 바와 같이, 멀티-웨이퍼 포드 또는 카세트 (5473) 각각은 휴대용의 미니-환경처럼 작용할 수도 있고 - 버퍼 가스가 멀티-웨이퍼 포드 또는 카세트 (5473) 각각을 통해 흐를 때, 버퍼 가스는 슬롯 도어 내의 슬롯으로부터 뿐만 아니라 슬롯 도어와 포드 또는 카세트를 통한 임의의 갭들을 통해 흐름으로써 포드 또는 카세트를 탈출할 수도 있다. 이 버퍼 가스 손실은 앞서 논의된 바와 같이, 슬롯 도어들이 사용되지 않는 경우보다 상당히 보다 낮은 레이트일 수도 있다. 버퍼 가스는 포드 또는 카세트 상의 피팅 (fitting) 또는 피팅들에 연결된 가요성 호스 또는 호스들 (미도시) 을 통해, 또는 수직 또는 수평 포드/카세트 포지셔닝 시스템에 통합된 버퍼 가스 전달 시스템을 통해, 예를 들어, 포드 또는 카세트가 특정한 위치 또는 위치들에 위치될 때 포드 또는 카세트 내의 대응하는 가스 포트들과 정렬하는 수직 리프트 트랙들 내의 가스 포트 또는 포트들을 통해 각각의 포드 또는 카세트에 제공될 수도 있다.
논의된 바와 같이, 도 55는 도 54의 포드들 또는 카세트들의 클로즈-업을 도시한다. 보이는 바와 같이, 멀티-웨이퍼 포드 또는 카세트 (5473) 는 내부에 저장된 하나 이상의 웨이퍼들 (5404) 을 가질 수도 있다. 이 경우에, 5 개의 웨이퍼들 (5404) 이 멀티-웨이퍼 포드 또는 카세트 (5473) 내에 저장되지만, 보다 많거나 보다 적은 웨이퍼들 (5404) 이 멀티-웨이퍼 포드 또는 카세트 (5473) 의 사이즈에 따라 이러한 방식으로 저장될 수도 있다. 멀티-웨이퍼 포드 또는 카세트 (5473) 의 벽들은 멀티-웨이퍼 포드 또는 카세트 (5473) 내에 웨이퍼들을 지지하도록 구성된, 레지들, 예를 들어, 웨이퍼 지지 피처들 (5409) 을 가질 수도 있다. 대안적으로, 멀티-웨이퍼 포드들 또는 카세트들 (5473) 은 포드들 또는 카세트들의 중심을 향하여 돌출하는 레지들을 가진 코너에 위치된 포스트들을 가질 수도 있고; 포스트들은 웨이퍼들로 하여금 포스트들 사이를 복수의 방향들로, 예를 들어, X-축을 따라, Y-축을 따라, 또는 X-축과 Y-축 양자를 따라 지나가게 하도록 서로 이격될 수도 있다.
도 56 내지 도 62는 또 다른 멀티-스테이션 반도체 프로세싱 툴 또는 또 다른 멀티-스테이션 반도체 프로세싱 툴의 부분들의 다양한 도면들을 도시한다. 도 56에서 보이는 바와 같이, 멀티-스테이션 반도체 프로세싱 툴은 복수의 반도체 프로세싱 챔버들 (5674) 을 지지할 수도 있는 섀시 (5672) 를 가질 수도 있다. 도 57은 도 56과 동일하지만, 섀시 (5672) 가 부가적인 명료성을 위해 제거되었다. 도 58은 다양한 컴포넌트들이 절단되는 도 58의 절단된 버전이고; 이들 컴포넌트들은 수직 로봇 암 컨베이어들 (5691) 및 수직 웨이퍼 카세트 컨베이어들 (5684) 이다 (이들 컴포넌트들에 대한 절단된 면들은 크로스-해치됨). 이 예에서, 2 × 2 × 8 직사각형 어레이로 배열된 16 개의 반도체 프로세싱 챔버들 (5674A 내지 5674P) 이 있다 (여기서, A × B × C에서, A = 제 1 수평 방향으로의 챔버들의 수, B = 제 2, 직교 수평 방향으로의 챔버들의 수, 및 C = 수직 방향으로의 챔버들의 수). 이러한 반도체 프로세싱 툴들은 특정한 구성에 따라, 반도체 프로세싱 챔버들의 수들 및 다른 구성들을 포함할 수도 있다. 예를 들어, 이러한 툴들은 2 × 2 × 1 어레이들, 2 × 1 × 2 어레이들, 2 × 2 × 2 어레이들, 2 × 4 × 1 어레이들, 2 × 4 × 2 어레이들 (도시된 바와 같음), 또는 임의의 다른 멀티-챔버 어레이들을 포함할 수도 있다.
멀티-스테이션 반도체 프로세싱 툴은 수평 웨이퍼 카세트 컨베이어 (5680) 를 가질 수도 있다. 이 예에서, 수평 웨이퍼 카세트 컨베이어 (5680) 는 예를 들어, 볼 스크류들 또는 다른 선형 구동부 엘리먼트들에 의해, 수평 축을 따라 병진될 수도 있는 복수의 플랫폼들에 의해 제공될 수도 있다. 플랫폼 각각은 멀티-웨이퍼 카세트 (5673) 로 하여금 플랫폼들에 의해 운반되게 하기 위해서 멀티-웨이퍼 카세트 (5673) 상의 피처들과 인터페이싱하도록 설계된 피처들을 가질 수도 있다. 수평 웨이퍼 카세트 컨베이어 (5680) 는 제 1 수평 위치 (5681A), 제 2 수평 위치 (5681B), 및 제 3 수평 위치 (5681C) 와 같은, 복수의 수평 위치들 (5681) 사이에서 멀티-웨이퍼 카세트들 (5673) 을 수송하도록 구성될 수도 있고, 수평 위치들 각각은 수직 웨이퍼 카세트 컨베이어 (5684), 예를 들어, 수직 웨이퍼 카세트 컨베이어 (5684A, 5684B, 및 5684C) 와 멀티-웨이퍼 카세트 (5673) 를 정렬시킬 수도 있다. 수직 웨이퍼 카세트 컨베이어 (5684) 각각은 멀티-웨이퍼 카세트 (5673) 가 기준 수직 위치 (5686) 에서 수평 웨이퍼 카세트 컨베이어 (5680) 에 의해 지지될 때 수직 웨이퍼 카세트 컨베이어 (5684) 와 대응하는 수평 위치들 (5681) 중 일 수평 위치에 위치되는 멀티-웨이퍼 카세트 (5673) 상에 래칭될 (latch) 수도 있는 기계적 인터페이스 (5685) 를 가질 수도 있다. 기계적 인터페이스들 (5685), 및 기계적 인터페이스들 (5685) 이 상부에 래칭되는 임의의 멀티-웨이퍼 카세트들 (5673) 은, 그 각각의 수직 웨이퍼 카세트 컨베이어들 (5684) 에 의해 상이한 수직 위치들 (5687), 예를 들어, 제 1 수직 카세트 위치 (5687A) 및 제 2 수직 카세트 위치 (5687B) 로 리프팅될 수도 있다.
멀티-스테이션 반도체 프로세싱 툴은 또한 대응하는 수직 로봇 암 컨베이어들 (5691) 에 장착될 수도 있는 하나 이상의 로봇 암들 (5602), 예컨대, 로봇 암 (5602A) 및 로봇 암 (5602B) 을 포함할 수도 있다. 일부 구현예들에서, 로봇 암 (5602) 각각은 수평 위치들 (5681) 중 2 개의 수평 위치들 사이에 위치될 수도 있다. 예를 들어, 도시된 구현예에서, 로봇 암 (5602A) 은 제 1 수평 위치 (5681A) 와 제 2 수평 위치 (5681B) 사이에 위치될 수도 있고, 그리고 로봇 암 (5602B) 은 제 2 수평 위치 (5681B) 와 제 3 수평 위치 (5681C) 사이에 위치될 수도 있다. 수직 로봇 암 컨베이어들 (5691) 은 로봇 암들 (5602) 을 수직 로봇 암 위치들 (5692) 사이, 예를 들어, 제 1 수직 로봇 암 위치 (5692A) 와 제 2 수직 로봇 암 위치 (5692B) 사이에서 이동시키도록 구성될 수도 있다. 제 1 수직 로봇 암 위치 (5692A) 에 있을 때, 제 1 로봇 암 (5602A) 은 제 1 수직 카세트 위치 (5687A) 에 그리고 또한 제 1 또는 제 2 수평 위치들 (5681A 또는 5681B) 에 위치되는 멀티-웨이퍼 카세트 (5673) 내의 반도체 웨이퍼들 (5604) 에 액세스할 수도 있고 그리고 이어서 이들 웨이퍼들을 반도체 프로세싱 챔버들 (5674A 내지 5674D) 로 이송할 수도 있다. 이에 대응하여, 제 2 수직 로봇 암 위치 (5692B) 에 있을 때, 제 1 로봇 암 (5602A) 은 제 2 수직 카세트 위치 (5687B) 에 그리고 또한 제 1 또는 제 2 수평 위치들 (5681A 또는 5681B) 에 위치되는 멀티-웨이퍼 카세트 (5673) 내의 반도체 웨이퍼들 (5604) 에 액세스할 수도 있고 그리고 이어서 이들 웨이퍼들을 반도체 프로세싱 챔버들 (5674E 내지 5674H) 로 이송할 수도 있다. 수직 카세트 위치들 (5687) 및 수직 로봇 암 위치들 (5692) 이 반드시 고정된 위치들을 지칭하는 것은 아니지만, 위치들의 범위들을 지칭할 수도 있다는 것이 이해된다. 예를 들어, 멀티-웨이퍼 카세트 및 로봇 암이 대응하는 수직 위치들에 위치될 때, 웨이퍼 스택 (5607) 내에서 상이한 높이들에 있는 웨이퍼들 (5604) 에 액세스하도록 멀티-웨이퍼 카세트에 대하여 수직으로 작은 양들만큼 로봇 암을 이동시키는 것이 필수적일 수도 있다. 대안적으로 또는 부가적으로, 멀티-웨이퍼 카세트는 로봇 암 (5602) 으로 하여금 웨이퍼 (5604) 를 제거하거나 웨이퍼 (5604) 를 삽입하게 하도록 로봇 암 (5602) 의 엔드 이펙터와 정렬하여 웨이퍼 스택 (5607) 내의 특정한 웨이퍼를 가져오기 위해서 이러한 작은 수직 양들만큼 이동될 수도 있다. 따라서, 용어들 "수직 카세트 위치" (5687) 및 "수직 로봇 암 위치" (5692) 는 특정한 수직 위치 +/- 웨이퍼 스택 (5607) 의 높이를 지칭하는 것으로서 이해된다.
유사하게, 제 1 수직 로봇 암 위치 (5692A) 에 있을 때, 제 2 로봇 암 (5602B) 은 제 1 수직 카세트 위치 (5687A) 에 그리고 또한 제 2 또는 제 3 수평 위치들 (5681B 또는 5681C) 에 위치되는 멀티-웨이퍼 카세트 (5673) 내의 반도체 웨이퍼들 (5604) 에 액세스할 수도 있고 그리고 이어서 이들 웨이퍼들을 반도체 프로세싱 챔버들 (5674I 내지 5674L) 로 이송할 수도 있다. 이에 대응하여, 제 2 수직 로봇 암 위치 (5692B) 에 있을 때, 제 2 로봇 암 (5602B) 은 제 2 수직 카세트 위치 (5687B) 에 그리고 또한 제 2 또는 제 3 수평 위치들 (5681B 또는 5681C) 에 위치되는 멀티-웨이퍼 카세트 (5673) 내의 반도체 웨이퍼들 (5604) 에 액세스할 수도 있고 그리고 이어서 이들 웨이퍼들을 반도체 프로세싱 챔버들 (5674M 내지 5674P) 로 이송할 수도 있다. 멀티-웨이퍼 카세트들 (5673) 은 내부에 포함된 웨이퍼들로 하여금 반도체 프로세싱 챔버들 중 다양한 반도체 프로세싱 챔버들로/로부터 이송되게 하도록 멀티-스테이션 반도체 프로세싱 툴을 통해 셔틀될 수도 있는 멀티-웨이퍼 저장 시스템들로서 기능할 수도 있다.
멀티-웨이퍼 카세트들 (5673) 은 멀티-웨이퍼 카세트들 (5673) 을 통해 흐르는 버퍼 가스를 갖도록 구성될 수도 있다. 예를 들어, 멀티-웨이퍼 카세트들 (5673) 은 버퍼 가스 포트들, 예를 들어, 기계적 인터페이스들 (5685) 의 밑면들 상의 버퍼 가스 포트 (5688) 또는 대응하는 버퍼 가스 포트들과 인터페이싱할 수도 있는 하나 이상의 버퍼 가스 유입부들 (5689) (도 59 및 도 60 참조) 을 가질 수도 있다. 멀티-웨이퍼 카세트 (5673) 가 수평 웨이퍼 카세트 컨베이어 (5680) 의 플랫폼들 중 일 플랫폼 상에서 도킹될 때, 버퍼 가스는 버퍼 가스 포트 (5688) 및 버퍼 가스 유입부 (5689) 를 통해 멀티-웨이퍼 카세트 (5673) 에 제공될 수도 있다. 이에 대응하여, 멀티-웨이퍼 카세트 (5673) 가 기계적 인터페이스 (5685) 상에 래칭될 때, 멀티-웨이퍼 카세트 (5673) 에는 기계적 인터페이스 (5685) 내의 버퍼 가스 포트와 인터페이싱하는 버퍼 가스 유입부 (5689) 및 기계적 인터페이스 (5685) 에 위치된 버퍼 가스 포트를 통해 버퍼 가스가 제공될 수도 있다. 그러므로, 버퍼 가스는 멀티-스테이션 반도체 프로세싱 툴 내의 임의의 위치의 멀티-웨이퍼 카세트 (5673) 에 공급될 수도 있고, 이에 따라 멀티-웨이퍼 카세트 (5673) 내에 포함된 웨이퍼들로 하여금 버퍼 가스에 의해 둘러싸이게 되고 그리고 버퍼 가스에 의해 주변 설비 공기로부터 적어도 어느 정도 보호되게 한다.
도 59 및 도 60은 멀티-웨이퍼 카세트들 (5673) 중 일 멀티-웨이퍼 카세트의 도면들이고; 도 59는 멀티-웨이퍼 카세트 (5673) 의 상부 측면을 도시하고, 그리고 도 60은 멀티-웨이퍼 카세트 (5673) 의 밑면을 도시한다. 멀티-웨이퍼 카세트 (5673) 는 각각 구동 메커니즘 (5679) 및 수평 슬롯 (5646) 을 가진 도어 (5678) 를 가진, 슬롯 도어 메커니즘들을 가질 수도 있다. 일 슬롯 도어 메커니즘은 대응하는 도어 (5678) 가 멀티-웨이퍼 카세트 (5673) 의 정면 개구의 정면에 위치되도록 위치될 수도 있고; 다른 슬롯 도어 메커니즘은 대응하는 도어 (5678) 가 멀티-웨이퍼 카세트 (5673) 의 후면 개구의 정면에 위치되도록 위치될 수도 있다. 멀티-웨이퍼 카세트 (5673) 는 버퍼 가스 유입부들 (5689) 을 가질 수도 있다. 하단 버퍼 가스 유입부 (5689) 는 수평 웨이퍼 카세트 컨베이어 (5680) 상에 위치된 버퍼 가스 포트들 (5688) 중 일 버퍼 가스 포트와 인터페이싱할 수도 있고; 상부 가스 유입부 (5689) 는 기계적 인터페이스들 (5685) 중 일 기계적 인터페이스 상에 위치된 버퍼 가스 포트와 인터페이싱할 수도 있다.
도 61 및 도 62는 도 59의 멀티-웨이퍼 카세트 (5673) 의 절단된 도면들을 도시한다. 도 61에서, 멀티-웨이퍼 카세트 (5673) 의 일 측면이 제거된다 (절단된 표면들은 상이한 타입들의 크로스-해칭으로 도시됨). 도 61에서 보이는 바와 같이, 플레넘 (56101) 은 멀티-웨이퍼 카세트 (5673) 의 각각의 측벽 내에 위치되고; 플레넘 (56101) 은 멀티-웨이퍼 카세트 (5673) 의 정면 개구와 후면 개구 사이에 개재되고, 그리고 버퍼 가스 유입부들 (5689) 중 상이한 버퍼 가스 유입부와 각각 연결되는 분배 통로들 (56102) 을 통해 버퍼 가스가 플레넘 (56101) 에 제공될 수도 있다. 버퍼 가스 유입부들 (5689) 은 각각 버퍼 가스로 하여금 버퍼 가스 유입부들 (5689) 을 통해 분배 통로들 (56102) 내로 흐르게 하지만, 역방향으로의 버퍼 가스 플로우를 방지할 수도 있는, 1-방향 밸브, 예를 들어, 체크-밸브를 구비할 수도 있다. 그러므로, 버퍼 가스는 다른 버퍼 가스 유입부 (5689) 가 버퍼 가스 소스와 연결되지 않을 때에도 어느 하나의 버퍼 가스 유입부 (5689) 를 통해 플레넘들 (56101) 내로 도입될 수도 있다. 플레넘들 (56101) 은 버퍼 가스로 하여금 멀티-웨이퍼 카세트 (5673) 내의 웨이퍼들 (5604) 사이의 각각의 웨이퍼 사이의 갭 내로 흐르게 하는 어레이로 배열될 수도 있는 복수의 분배 포트들 (56100) 을 가질 수도 있다. 물론, 멀티-웨이퍼 카세트들이 버퍼 가스를 사용하여 퍼지되지 않는 구현예들에서, 예를 들어, 단 하나의 버퍼 가스 분배기 (5605) 가 사용되는 시스템들에서, 이러한 피처들이 생략될 수도 있다.
도 63 내지 도 68은 다양한 위치들에서 도어 (5678) 를 가진 멀티-웨이퍼 카세트 (5673) 의 정면도들을 도시한다. 도 63에서, 도어 (5678) 는 슬롯 (5646) 이 웨이퍼 스택 (5607) 내의 웨이퍼들 (5604) 중 임의의 웨이퍼와 정렬되지 않도록 상승된 위치에 있다. 이 도어 (5678) 의 포지셔닝은 웨이퍼들이 멀티-웨이퍼 카세트 (5673) 내로 또는 멀티-웨이퍼 카세트 (5673) 로부터 이송되지 않을 때 사용될 수도 있다. 도 64 내지 도 68 각각은 웨이퍼 스택 (5607) 내의 웨이퍼들 (5604) 중 상이한 웨이퍼와 정렬하도록 위치된 도어 (5678) 를 도시한다.
실제로, 도 59 내지 도 68에 도시된 바와 같이, 슬롯 도어 메커니즘들을 가진 멀티-웨이퍼 카세트들 (5673) 을 가진 멀티-스테이션 반도체 프로세싱 툴이 구현될 수도 있다. 멀티-스테이션 반도체 프로세싱 툴은 또한 본 명세서에서 논의된 버퍼 가스 분배기들 중 임의의 버퍼 가스 분배기들일 수도 있는 버퍼 가스 분배기들 (5605) 을 가진 로봇 암들 (5602) 을 활용할 수도 있다. 일부 구현예들에서, 단 하나의 이들 버퍼 가스 마이크로클라이메이트 시스템들이 사용될 수도 있지만, 듀얼 방법이 멀티-스테이션 반도체 프로세싱 툴 내의 모든 위치들에서 증가된 버퍼 가스 보호를 제공할 수도 있다. 일부 구현예들에서, 수평 웨이퍼 카세트 컨베이어의 일 단부 또는 양 단부들은 본 명세서에서 논의된 다른 구현예들과 유사한 버퍼 가스 환경을 가진 EFEM으로 이어질 수도 있다. 상기에 논의된 멀티-스테이션 툴들과 같은 멀티-스테이션 툴들이 또한 둘러싸이거나 반-둘러싸일 수도 있고, 그리고 버퍼 가스가 또한 이러한 버퍼 가스가 본 명세서에서 앞서 논의된 EFEM들을 통해 흐르는 방법과 유사하게, 전체 툴을 통해 흐를 수도 있다는 것이 또한 이해된다.
본 명세서에서 논의된 슬롯 도어 콘셉트들의 추가의 변형이 훨씬 더 감소된 수직 높이를 가진 수평 슬롯을 수반할 수도 있다는 것이 또한 이해된다. 이러한 시스템들에서, 수평 슬롯을 가진 도어는 수평 슬롯을 통한 웨이퍼 배치 또는 회수 동안 엔드 이펙터의 수직 이동들과 동시에 이동하도록 제어기에 의해 제어될 수도 있다. 그러므로, 수평 슬롯은 로봇 암이 웨이퍼의 픽킹 및 웨이퍼의 배치 동안 행해질 수도 있는 작은 수직 이동들을 수용하도록 보통 필요한 부가적인 높이를 포함할 필요가 없다.
이 개시에 기술된 구현예들에 대한 다양한 수정들은 당업자에게 손쉽게 명백해질 수도 있고, 그리고 본 명세서에 규정된 일반적인 원리들은 이 개시의 범위 또는 정신을 벗어나지 않고 다른 구현예들에 적용될 수도 있다. 그러므로, 본 개시는 본 명세서에 도시된 구현예들로 제한되도록 의도되지 않지만, 본 명세서에 개시된 청구항들, 원리들 및 신규한 특징들과 일치하는 가장 넓은 범위와 부합된다.
상기 논의로부터 손쉽게 명백해지는 바와 같이, 개별적인 구현예들의 맥락에서 이 명세서에 기술되는 특정한 특징들은 단일의 구현예와 조합하여 구현될 수 있다. 정반대로, 단일의 구현예의 맥락에서 기술되는 다양한 특징들은 복수의 구현예들에서 개별적으로 또는 임의의 적합한 하위조합으로 구현될 수 있다. 또한, 특징들이 특정한 조합들에서 작용하는 것으로서 그리고 심지어 처음에 이와 같이 청구된 것으로서 상기에 기술되지만, 청구된 조합으로부터 하나 이상의 특징들은 일부 경우들에서 조합으로부터 배제될 수 있고, 그리고 청구된 조합이 하위조합 또는 하위조합의 변동으로 지향될 수도 있다.
임의의 특정한 기술된 구현예들의 특징들이 서로 양립할 수 없는 것으로서 분명히 식별되거나 주위의 문맥이 상호 배제적이고 그리고 상호 보완적이고 그리고/또는 지지적인 의미로 쉽게 결합 가능하지 않는다는 것을 주위 문맥이 암시하지 않는한, 이 개시의 전체는 이들 상호 보완적인 구현예들의 특정한 특징들이 하나 이상의 포괄적이지만, 약간 상이한, 기술적 해결책들을 제공하도록 선택적으로 결합될 수 있다는 것을 고려하고 구상한다. 그러므로 상기 기술이 단지 예를 통해 주어지고 그리고 상세들의 수정들이 이 개시의 범위 내에서 행해질 수도 있다는 것이 더 이해될 것이다.
Claims (61)
- 로봇 암;
상기 로봇 암에 부착되고 그리고 상기 로봇 암의 이동 동안 반도체 웨이퍼를 지지하도록 구성된 엔드 이펙터; 및
상기 반도체 웨이퍼가 상기 엔드 이펙터에 의해 지지될 때 상기 반도체 웨이퍼의 대면 표면에 걸쳐 버퍼 가스를 흘리도록 구성된 버퍼 가스 분배기를 포함하고,
상기 버퍼 가스 분배기는 상기 로봇 암의 적어도 일부의 이동 동안 상기 엔드 이펙터와 연계하여 (in tandem with) 이동하도록 구성되고,
상기 버퍼 가스 분배기 및 상기 엔드 이펙터는, 상기 엔드 이펙터 및 상기 버퍼 가스 분배기가 상기 반도체 웨이퍼들에 대해 수직인 축을 따라 배열된 반도체 웨이퍼들의 스택 내로 삽입 가능하도록 수직 축을 따라 이격되고, 그리고
상기 버퍼 가스 분배기 및 상기 엔드 이펙터는 각각 상기 반도체 웨이퍼들의 상기 스택 내의 웨이퍼 사이의 갭들 내에 피팅되도록 (fit) 사이징되는, 장치. - 제 1 항에 있어서,
상기 버퍼 가스 분배기는 상기 엔드 이펙터에 대해 공간을 두고 고정되고 그리고 상기 로봇 암의 모든 이동 동안 상기 엔드 이펙터와 연계하여 이동하는, 장치. - 제 1 항에 있어서,
상기 반도체 웨이퍼들의 어레이는 FOUP (front-opening unified pod), 웨이퍼 스토커 (stocker), 웨이퍼 버퍼, 로드-록, 멀티-웨이퍼 카세트, 및 나란한 멀티-웨이퍼 카세트로 구성된 그룹으로부터 선택된 하나 이상의 장비의 피스들의 웨이퍼-지지 피처들에 의해 규정된 웨이퍼 사이의 어레이 공간을 갖는, 장치. - 제 3 항에 있어서,
상기 반도체 웨이퍼가 상기 하나 이상의 장비의 피스들의 웨이퍼-지지 피처와 상기 엔드 이펙터 양자에 의해 지지될 때 그리고 상기 버퍼 가스 분배기를 상기 반도체 웨이퍼에 대해 수직인 제 1 방향을 따라 볼 때, 상기 반도체 웨이퍼와 오버랩하는 상기 버퍼 가스 분배기의 부분은, 상기 제 1 방향을 따라 볼 때 상기 하나 이상의 장비의 피스들의 상기 웨이퍼-지지 피처들과 오버랩하지 않는 형상을 갖는, 장비. - 제 1 항에 있어서,
상기 웨이퍼-지지 피처 각각은 상기 엔드 이펙터를 향하는 갭을 갖고; 그리고
상기 버퍼 가스 분배기는 상기 갭보다 작은 상기 버퍼 가스 분배기의 장축에 대해 수직인 방향으로 폭을 갖는, 장치. - 제 1 항에 있어서,
상기 반도체 웨이퍼가 상기 엔드 이펙터에 의해 지지될 때 상기 반도체 웨이퍼와 오버랩하는 구역들에서, 상기 버퍼 가스 분배기는 상기 반도체 웨이퍼에 대해 직교하는 방향을 따라 9 ㎜ 이하의 두께이고; 그리고
상기 버퍼 가스 분배기는,
상기 엔드 이펙터를 향하는 하단 표면,
상기 버퍼 가스 분배기의 상기 하단 표면으로부터 반대 방향으로 향하는 상단 표면,
상기 버퍼 가스 분배기의 상기 상단 표면과 상기 버퍼 가스 분배기의 상기 하단 표면 사이를 걸치는 (span) 하나 이상의 측면 표면들,
상기 버퍼 가스 분배기의 상기 하단 표면 상에 배열된 하나 이상의 제 1 가스 분배 포트들,
상기 버퍼 가스 분배기의 상기 측면 표면들 상에 배열된 복수의 제 2 가스 분배 포트들, 및
버퍼 가스를 상기 하나 이상의 제 1 가스 분배 포트들 및 상기 복수의 제 2 가스 분배 포트들로 공급하도록 구성된 가스 분배 통로들을 포함하는, 장치. - 제 1 항에 있어서,
상기 버퍼 가스 분배기는, 상기 반도체 웨이퍼가 상기 엔드 이펙터에 의해 지지되고 그리고 상기 버퍼 가스 분배기를 상기 반도체 웨이퍼에 대해 수직인 제 1 방향을 따라 볼 때 상기 모든 반도체 웨이퍼에 걸쳐 연장하지 않는, 장치. - 제 7 항에 있어서,
상기 반도체 웨이퍼가 상기 엔드 이펙터에 의해 지지되고 그리고 상기 버퍼 가스 분배기를 상기 반도체 웨이퍼에 대해 수직인 상기 제 1 방향을 따라 볼 때,
상기 버퍼 가스 분배기는,
상기 로봇 암에 상기 엔드 이펙터를 연결하는 (join) 기계적 인터페이스 및 반도체 웨이퍼의 중심 축을 통과하는 제 2 방향으로 상기 반도체 웨이퍼의 직경의 적어도 90 %에 걸쳐 연장하고, 그리고
상기 제 1 방향 및 상기 제 2 방향 양자에 대해 수직인 제 3 방향으로 상기 반도체 웨이퍼에 걸쳐 단지 부분적으로 연장하는, 장치. - 제 1 항에 있어서,
상기 버퍼 가스 분배기의 적어도 최외측 절반은, 상기 반도체 웨이퍼가 상기 엔드 이펙터에 의해 지지될 때 그리고 상기 반도체 웨이퍼에 대해 평행한 축을 따라 볼 때 상기 반도체 웨이퍼와 오버랩하지 않는, 장치. - 제 1 항에 있어서,
상기 반도체 웨이퍼가 상기 엔드 이펙터에 의해 지지될 때 상기 반도체 웨이퍼 위로 연장하는 상기 버퍼 가스 분배기의 부분은, 상기 반도체 웨이퍼에 대해 평행한 축을 따라 볼 때 상기 반도체 웨이퍼와 오버랩하지 않는, 장치. - 반도체 웨이퍼들을 프로세싱하기 위한 장치에 있어서,
상기 장치는,
인클로저;
수직 축을 따라 배열된 N 개의 웨이퍼 지지 구조체들을 가진 멀티-웨이퍼 저장 시스템을 지지하도록 구성된 인터페이스로서, 상기 웨이퍼 지지 구조체들은 직경 D의 반도체 웨이퍼들을 지지하도록 사이징되고, 상기 N은 1 초과의 정수이고, 그리고 상기 반도체 웨이퍼 지지 구조체 각각은 상기 어레이 내의 임의의 인접한 웨이퍼 지지 구조체 또는 웨이퍼 지지 구조체들로부터 평균 거리 d만큼 이격되는, 상기 인터페이스; 및
벽을 포함하고,
상기 벽은 D 초과의 폭 및 (N-1)d 미만의 높이를 가진 수평 슬롯을 포함하고,
상기 벽은 (2N-1) d 초과의 높이를 갖고,
d 초과의 높이를 갖고,
상기 장치는 상기 수직 축을 따라 상기 수평 슬롯과 상기 인터페이스 사이에서 상대적인 병진 운동을 제공하도록 구성되고,
상기 벽은, 상기 멀티-웨이퍼 저장 시스템이 상기 인터페이스에 의해 지지될 때, 반도체 웨이퍼들이 상기 멀티-웨이퍼 저장 시스템 내로 로딩되거나 (loaded) 상기 멀티-웨이퍼 저장 시스템으로부터 언로딩될 (unloaded) 수도 있는 상기 멀티-웨이퍼 저장 시스템의 개구에 가까이 있도록 위치되고, 그리고
상기 반도체 웨이퍼들이 상기 멀티-웨이퍼 저장 시스템 내로 로딩되거나 상기 멀티-웨이퍼 저장 시스템으로부터 언로딩될 수도 있는 상기 벽은, 상기 멀티-웨이퍼 저장 시스템이 상기 인터페이스에 의해 지지될 때 상기 멀티-웨이퍼 저장 시스템의 내부 볼륨과 상기 인클로저의 내부 볼륨 사이에 플로우 제한 배리어를 제공하는, 장치. - 제 11 항에 있어서,
제 1 버퍼 가스를 상기 인클로저 내로 전달하도록 구성된 제 1 버퍼 가스 포트; 및
상기 멀티-웨이퍼 저장 시스템이 상기 인터페이스에 의해 지지될 때 제 2 버퍼 가스를 상기 멀티-웨이퍼 저장 시스템 내로 전달하도록 구성된 제 2 버퍼 가스 포트를 더 포함하는, 장치. - 제 11 항에 있어서,
로봇 암;
상기 로봇 암에 부착되고 그리고 상기 로봇 암의 이동 동안 반도체 웨이퍼를 지지하도록 구성된 엔드 이펙터; 및
상기 반도체 웨이퍼가 상기 엔드 이펙터에 의해 지지될 때 상기 반도체 웨이퍼의 대면 표면에 걸쳐 제 1 버퍼 가스를 흘리도록 구성된 버퍼 가스 분배기를 더 포함하고,
상기 버퍼 가스 분배기는 상기 로봇 암의 적어도 일부의 이동 동안 상기 엔드 이펙터와 연계하여 이동하도록 구성되고,
상기 버퍼 가스 분배기 및 상기 엔드 이펙터는, 상기 멀티-웨이퍼 저장 시스템이 상기 장치 내에 설치되고 그리고 상기 반도체 웨이퍼들이 상기 멀티-웨이퍼 저장 시스템에 쌓일될 (stock) 때 상기 웨이퍼 지지 구조체들의 어레이에 의해 지지된 반도체 웨이퍼들의 어레이 내로 그리고 상기 수평 슬롯을 통해 상기 엔드 이펙터 및 상기 버퍼 가스 분배기가 삽입 가능하도록 이격되고, 그리고
상기 버퍼 가스 분배기 및 상기 엔드 이펙터는 각각 상기 반도체 웨이퍼들의 어레이의 웨이퍼 사이의 갭들 내에 피팅되도록 사이징되는, 장치. - 제 13 항에 있어서,
제 2 버퍼 가스를 상기 인클로저 내로 전달하도록 구성된 제 1 버퍼 가스 포트; 및
상기 멀티-웨이퍼 저장 시스템이 상기 인터페이스에 의해 지지될 때 제 3 버퍼 가스를 상기 멀티-웨이퍼 저장 시스템 내로 전달하도록 구성된 제 2 버퍼 가스 포트를 더 포함하는, 장치. - 제 14 항에 있어서,
상기 제 1 버퍼 가스, 상기 제 2 버퍼 가스, 및 상기 제 3 버퍼 가스 모두는 설비 질소 가스 소스에 의해 제공되는, 장치. - 제 13 항에 있어서,
상기 버퍼 가스 분배기는 상기 엔드 이펙터에 대해 공간을 두고 고정되고 그리고 상기 로봇 암의 모든 이동 동안 상기 엔드 이펙터와 연계하여 이동하는, 장치. - 제 11 항에 있어서,
상기 멀티-웨이퍼 저장 시스템을 더 포함하고, 상기 멀티-웨이퍼 저장 시스템은 상기 인터페이스에 의해 지지되는, 장치. - 제 11 항에 있어서,
상기 멀티-웨이퍼 저장 시스템은 FOUP (front-opening unified pod), 웨이퍼 스토커, 웨이퍼 버퍼, 멀티-웨이퍼 카세트, 및 로드-록으로 구성된 그룹으로부터 선택되는, 장치. - 제 11 항에 있어서,
구동 메커니즘을 더 포함하고, 상기 구동 메커니즘은 상기 인클로저에 대해 상기 수직 축을 따라 상기 벽을 병진시키도록 구성되는, 장치. - 제 11 항에 있어서,
구동 메커니즘을 더 포함하고, 상기 구동 메커니즘은 상기 인클로저에 대해 상기 수직 축을 따라 상기 인터페이스를 병진시키도록 구성되는, 장치. - 제 11 항에 있어서,
로봇 암; 및
상기 로봇 암에 부착되고 그리고 상기 로봇 암의 이동 동안 반도체 웨이퍼를 지지하도록 구성된 엔드 이펙터를 더 포함하고,
상기 수평 슬롯은 중간 부분의 반대편들 상에 위치된 상기 수평 슬롯의 플랭킹 (flanking) 부분들의 상기 수직 축을 따른 대응하는 제 2 치수들보다 큰 상기 수직 축을 따른 제 1 치수를 갖는 상기 중간 부분을 갖고,
상기 중간 부분은 상기 로봇 암의 이동 동안 상기 반도체 웨이퍼를 지지하도록 구성되는 상기 엔드 이펙터의 부분의 폭보다 넓고,
상기 엔드 이펙터는 상기 반도체 웨이퍼가 상기 엔드 이펙터에 의해 지지될 때 상기 반도체 웨이퍼와 콘택트하도록 구성된 웨이퍼 콘택트 표면들을 갖고,
상기 엔드 이펙터는, 상기 반도체 웨이퍼가 상기 엔드 이펙터에 의해 지지되고 그리고 상기 엔드 이펙터를 상기 반도체 웨이퍼에 대해 수직인 방향을 따라 볼 때, 상기 반도체 웨이퍼의 외측 주변부 내에 위치되고 그리고 상기 웨이퍼 콘택트 표면들로부터 이격되어 마주보는 하나 이상의 제 1 하단 표면들을 갖고,
상기 제 1 치수는, 상기 웨이퍼 콘택트 표면들과 상기 엔드 이펙터의 상기 하나 이상의 제 1 하단 표면들의 최하단 표면 사이의 수직 거리 더하기 상기 제 2 치수 이상인, 장치. - 제 21 항에 있어서,
상기 엔드 이펙터는, 상기 엔드 이펙터가 상기 멀티-웨이퍼 저장 시스템 내로 반도체 웨이퍼를 배치하도록 사용될 때 상기 수평 슬롯을 통과하고 그리고 상기 하나 이상의 제 1 하단 표면들로부터 이격되어 마주보는 하나 이상의 제 1 상부 표면들을 갖고, 그리고
상기 제 1 치수는, 상기 엔드 이펙터의 상기 하나 이상의 제 1 상부 표면들의 최상부 표면과 상기 엔드 이펙터의 상기 하나 이상의 제 1 하단 표면들의 상기 최하단 표면 사이의 수직 거리 이상인, 장치. - 제 21 항에 있어서,
상기 반도체 웨이퍼가 상기 엔드 이펙터에 의해 지지될 때 상기 반도체 웨이퍼의 대면 표면에 걸쳐 버퍼 가스를 흘리도록 구성된 버퍼 가스 분배기를 더 포함하고,
상기 버퍼 가스 분배기는 상기 로봇 암의 적어도 일부의 이동 동안 상기 엔드 이펙터와 연계하여 이동하도록 구성되고,
상기 버퍼 가스 분배기 및 상기 엔드 이펙터는, 상기 멀티-웨이퍼 저장 시스템이 상기 장치 내에 설치되고 그리고 상기 반도체 웨이퍼들이 상기 멀티-웨이퍼 저장 시스템에 쌓일될 때 상기 웨이퍼 지지 구조체들의 어레이에 의해 지지된 반도체 웨이퍼들의 어레이 내로 상기 엔드 이펙터 및 상기 버퍼 가스 분배기가 삽입 가능하도록 이격되고,
상기 버퍼 가스 분배기 및 상기 엔드 이펙터는 각각 상기 반도체 웨이퍼들의 상기 어레이의 웨이퍼 사이의 갭들 내에 피팅되도록 사이징되고,
상기 버퍼 가스 분배기는, 상기 엔드 이펙터가 상기 멀티-웨이퍼 저장 시스템으로부터 반도체 웨이퍼를 제거하도록 사용될 때 상기 수평 슬롯을 통과하고 그리고 상기 하나 이상의 제 1 하단 표면들로부터 이격되어 마주보는 하나 이상의 제 1 상부 표면들을 갖고, 그리고
제 1 치수는, 상기 버퍼 가스 분배기의 상기 하나 이상의 제 1 상부 표면들의 최상부 표면과 상기 엔드 이펙터의 상기 하나 이상의 제 1 하단 표면들의 최하단 표면 사이의 수직 거리 이상인, 장치. - 상이한 위치들에 위치된 복수의 웨이퍼 프로세싱 챔버들;
상기 상이한 위치들에서 상기 웨이퍼 프로세싱 챔버들을 지지하는 섀시;
하나 이상의 멀티-웨이퍼 카세트들로서, 상기 멀티-웨이퍼 카세트 각각은 수직 축을 따라 배열된 N 개의 웨이퍼 지지 구조체들을 갖고, 상기 웨이퍼 지지 구조체들은 직경 D의 반도체 웨이퍼들을 지지하도록 사이징되고, 상기 N은 1 초과의 정수이고, 그리고 상기 반도체 웨이퍼 지지 구조체 각각은 어레이 내의 임의의 인접한 웨이퍼 지지 구조체 또는 웨이퍼 지지 구조체들로부터 평균 거리 d만큼 이격되는, 상기 하나 이상의 멀티-웨이퍼 카세트들;
로봇 암의 이동 동안 상기 반도체 웨이퍼를 지지하도록 구성된 엔드 이펙터를 각각 가진 상기 하나 이상의 로봇 암들로서, 상기 하나 이상의 로봇 암들은 상기 반도체 웨이퍼들을 상기 하나 이상의 멀티-웨이퍼 카세트들로부터 그리고 상기 하나 이상의 멀티-웨이퍼 카세트들로 상기 복수의 웨이퍼 프로세싱 챔버들로 이송하도록 구성되는, 상기 하나 이상의 로봇 암들; 및
a) 상기 하나 이상의 멀티-웨이퍼 카세트들 각각의 부분인 적어도 하나의 슬롯 도어 메커니즘, b) 상기 하나 이상의 엔드 이펙터들에 의해 지지된 상기 반도체 웨이퍼들의 대면 표면들에 걸쳐 버퍼 가스를 흘리도록 구성된 하나 이상의 버퍼 가스 분배기들, 및 c) 상기 a) 와 상기 b) 양자로 구성된 그룹으로부터 선택된 적어도 하나의 버퍼 가스 마이크로클라이메이트 (microclimate) 시스템을 포함하는, 장치. - 제 24 항에 있어서,
상기 적어도 하나의 버퍼 가스 마이크로클라이메이트 시스템은 상기 하나 이상의 멀티-웨이퍼 카세트들 각각의 부분인 상기 적어도 하나의 슬롯 도어 메커니즘을 포함하고,
상기 멀티-웨이퍼 카세트 각각은 상기 웨이퍼들로 하여금 상기 멀티-웨이퍼 카세트 내로 삽입되거나 상기 멀티-웨이퍼 카세트로부터 철수되게 하도록 사이징된 정면 개구를 갖고;
상기 슬롯 도어 메커니즘 각각은,
D 초과의 폭 및 (N-1)d 미만의 높이를 가진 수평 슬롯을 가진 도어, 및
기계적 입력에 응답하여, 상기 멀티-웨이퍼 카세트의 상기 웨이퍼 지지 구조체들에 대해 수직으로 상기 도어를 병진시키도록 구성된 구동 메커니즘을 포함하고, 상기 슬롯 도어는 상기 멀티-웨이퍼 카세트의 부분이고,
상기 도어 각각은 (2N-1) d 초과의 높이를 갖고; 그리고
d 초과의 높이를 갖고; 그리고
상기 도어 각각은 상기 멀티-웨이퍼 카세트의 상기 정면 개구의 정면에 위치되고 상기 도어는 상기 멀티-웨이퍼 카세트의 부분인, 장치. - 제 24 항에 있어서,
상기 적어도 하나의 버퍼 가스 마이크로클라이메이트 시스템은 상기 하나 이상의 엔드 이펙터들에 의해 지지된 상기 반도체 웨이퍼들의 대면 표면들에 걸쳐 버퍼 가스를 흘리도록 구성된 상기 하나 이상의 버퍼 가스 분배기들을 포함하고,
상기 하나 이상의 버퍼 가스 분배기들 각각은 상기 하나 이상의 엔드 이펙터들 중 상이한 엔드 이펙터와 연관되고,
상기 버퍼 가스 분배기 각각은 상기 로봇 암의 적어도 일부의 이동 동안 상기 연관된 엔드 이펙터와 연계하여 이동하도록 구성되고, 상기 연관된 엔드 이펙터는 상기 로봇 암의 부분이고,
상기 각각의 버퍼 가스 분배기 및 상기 연관된 엔드 이펙터는, N 개의 반도체 웨이퍼들이 상기 N 개의 웨이퍼 지지 구조체들에 의해 지지될 때 상기 버퍼 가스 분배기 및 상기 연관된 엔드 이펙터가 상기 N 개의 웨이퍼 지지 구조체들에 의해 지지된 상기 N 개의 반도체 웨이퍼들의 스택 내로 삽입 가능하도록 이격되고,
상기 각각의 버퍼 가스 분배기 및 상기 연관된 엔드 이펙터는 각각 상기 N 개의 반도체 웨이퍼들의 상기 스택 내의 웨이퍼 사이의 갭들 내에 피팅되도록 사이징되는, 장치. - 제 26 항에 있어서,
상기 적어도 하나의 버퍼 가스 마이크로클라이메이트 시스템은 또한 상기 하나 이상의 멀티-웨이퍼 카세트들 각각의 부분인 상기 적어도 하나의 슬롯 도어 메커니즘을 포함하고,
상기 멀티-웨이퍼 카세트 각각은 상기 웨이퍼들로 하여금 상기 멀티-웨이퍼 카세트 내로 삽입되거나 상기 멀티-웨이퍼 카세트로부터 철수되게 하도록 사이징된 정면 개구를 갖고;
상기 슬롯 도어 메커니즘 각각은,
D 초과의 폭 및 (N-1)d 미만의 높이를 가진 수평 슬롯을 가진 도어, 및
기계적 입력에 응답하여, 상기 멀티-웨이퍼 카세트의 상기 웨이퍼 지지 구조체들에 대해 수직으로 상기 도어를 병진시키도록 구성된 구동 메커니즘을 포함하고, 슬롯 도어는 상기 멀티-웨이퍼 카세트의 부분이고,
상기 도어 각각은 (2N-1) d 초과의 높이를 갖고; 그리고
d 초과의 높이를 갖고; 그리고
상기 도어 각각은 상기 멀티-웨이퍼 카세트의 상기 정면 개구의 정면에 위치되고 상기 도어는 상기 멀티-웨이퍼 카세트의 부분인, 장치. - 제 25 항에 있어서,
상기 하나 이상의 멀티-웨이퍼 카세트들 중 적어도 하나를 수용하도록 그리고 수평 축을 따라 수평 위치들 사이에서 상기 수용된 상기 하나 이상의 멀티-웨이퍼 카세트들 중 적어도 하나를 병진시키도록 구성된 수평 웨이퍼 카세트 컨베이어를 더 포함하고,
상기 웨이퍼 프로세싱 챔버들은 상기 수평 웨이퍼 카세트 컨베이어의 양측 상에 이격된 위치들에 위치되고, 그리고
상기 하나 이상의 로봇 암들 중 제 1 로봇 암은, 제 1 멀티-웨이퍼 카세트가 적어도 상기 수평 위치들 중 제 1 수평 위치에 위치될 때, 상기 반도체 웨이퍼들을 상기 하나 이상의 멀티-웨이퍼 카세트들 중 제 1 멀티-웨이퍼 카세트와 상기 웨이퍼 프로세싱 챔버들 중 제 1 웨이퍼 프로세싱 챔버, 상기 웨이퍼 프로세싱 챔버들 중 제 2 웨이퍼 프로세싱 챔버, 상기 웨이퍼 프로세싱 챔버들 중 제 3 웨이퍼 프로세싱 챔버, 및 상기 웨이퍼 프로세싱 챔버들 중 제 4 웨이퍼 프로세싱 챔버 사이로 수송하도록 구성되고,
상기 제 1 웨이퍼 프로세싱 챔버 및 상기 제 2 웨이퍼 프로세싱 챔버는 상기 수평 웨이퍼 카세트 컨베이어의 제 1 측면 상에 위치되고,
상기 제 3 웨이퍼 프로세싱 챔버 및 상기 제 4 웨이퍼 프로세싱 챔버는 상기 수평 웨이퍼 카세트 컨베이어의 제 2 측면 상에 위치되고, 그리고
상기 수평 웨이퍼 카세트 컨베이어의 상기 제 1 측면은 상기 수평 웨이퍼 카세트 컨베이어의 상기 제 2 측면으로부터 상기 수평 웨이퍼 카세트 컨베이어의 반대편의 측면 상에 있는, 장치. - 제 28 항에 있어서,
하나 이상의 수직 웨이퍼 카세트 컨베이어들을 더 포함하고;
상기 수직 웨이퍼 카세트 컨베이어 각각은 상기 수평 위치들 중 상이한 수평 위치와 연관되고;
상기 하나 이상의 수직 웨이퍼 카세트 컨베이어들 중 제 1 수직 웨이퍼 카세트 컨베이어는 상기 제 1 수평 위치와 연관되고;
상기 수직 웨이퍼 카세트 컨베이어 각각은 하나 이상의 기계적 인터페이스들을 포함하고;
상기 수직 웨이퍼 카세트 컨베이어 각각의 상기 기계적 인터페이스 각각은, 상기 기계적 인터페이스가 상기 멀티-웨이퍼 카세트와 수직으로 정렬되고 그리고 상기 멀티-웨이퍼 카세트가 상기 수직 웨이퍼 카세트 컨베이어와 연관된 상기 수평 위치에 위치되고 그리고 기준 수직 위치에 상기 수평 웨이퍼 카세트 컨베이어에 의해 지지될 때, 상기 하나 이상의 멀티-웨이퍼 카세트들 중 일 멀티-웨이퍼 카세트와 인터페이싱하도록 구성되고;
상기 수직 웨이퍼 카세트 컨베이어 각각은, 상기 수직 웨이퍼 카세트 컨베이어에 포함된 상기 하나 이상의 기계적 인터페이스들, 및 상기 하나 이상의 기계적 인터페이스들이 인터페이싱되는 상기 멀티-웨이퍼 카세트 각각을 수직 축을 따라 하나 이상의 수직 카세트 위치들로 병진시키도록 구성되고;
상기 수직 카세트 위치들은 상기 기준 수직 위치와 동일한 높이 (elevation) 에 위치되지 않고; 그리고
상기 제 1 로봇 암은, 상기 제 1 멀티-웨이퍼 카세트가 상기 제 1 수평 위치에 위치되고 그리고 또한 상기 제 1 수직 웨이퍼 카세트 컨베이어에 의해 상기 하나 이상의 수직 카세트 위치들 중 제 1 수직 카세트 위치에 위치될 때, 상기 반도체 웨이퍼들을 상기 제 1 멀티-웨이퍼 카세트와 상기 제 1 웨이퍼 프로세싱 챔버, 상기 제 2 웨이퍼 프로세싱 챔버, 상기 제 3 웨이퍼 프로세싱 챔버, 및 상기 제 4 웨이퍼 프로세싱 챔버 사이로 수송하도록 구성되는, 장치. - 제 29 항에 있어서,
상기 기계적 인터페이스 각각은 적어도 하나의 버퍼 가스 포트를 포함하고,
상기 멀티-웨이퍼 카세트 각각은 적어도 하나의 버퍼 가스 유입부를 포함하고, 그리고
상기 멀티-웨이퍼 카세트 각각의 상기 적어도 하나의 버퍼 가스 유입부는, 상기 멀티-웨이퍼 카세트가 상기 기계적 인터페이스와 인터페이싱될 때 상기 기계적 인터페이스 각각의 상기 적어도 하나의 버퍼 가스 포트와 정렬되어, 버퍼 가스로 하여금 상기 적어도 하나의 버퍼 가스 포트 및 상기 적어도 하나의 버퍼 가스 유입부를 통해 상기 멀티-웨이퍼 카세트의 내부 볼륨으로 도입되게 하는, 장치. - 제 29 항에 있어서,
상기 하나 이상의 수직 웨이퍼 카세트 컨베이어들 중 제 2 수직 웨이퍼 카세트 컨베이어는 상기 수평 위치들 중 제 2 수평 위치와 연관되고;
상기 제 1 로봇 암은 상기 제 1 수평 위치와 상기 제 2 수평 위치 사이에 개재되고;
상기 멀티-웨이퍼 카세트 각각은 또한 상기 반도체 웨이퍼들로 하여금 상기 멀티-웨이퍼 카세트 내로 삽입되거나 상기 멀티-웨이퍼 카세트로부터 철수되게 하도록 또한 사이징되고 그리고 상기 멀티-웨이퍼 카세트의 상기 정면 개구에 반대편에 있는 후면 개구를 포함하고;
상기 하나 이상의 멀티-웨이퍼 카세트들 각각의 부분인 상기 적어도 하나의 슬롯 도어 메커니즘은 상기 멀티-웨이퍼 카세트 각각에 대해, 제 2 슬롯 도어 메커니즘을 포함하고;
상기 제 2 슬롯 도어 메커니즘 각각의 상기 도어는 상기 멀티-웨이퍼 카세트의 상기 후면 개구의 정면에 위치되고 상기 제 2 슬롯 도어 메커니즘은 상기 멀티-웨이퍼 카세트의 부분이고;
상기 제 1 로봇 암은, 또한 제 2 멀티-웨이퍼 카세트가 상기 제 2 수직 웨이퍼 카세트 컨베이어에 의해 상기 제 1 수직 카세트 위치에 그리고 상기 제 2 수평 위치에 위치될 때, 상기 반도체 웨이퍼들을 제 2 멀티-웨이퍼 카세트와 상기 제 1 웨이퍼 프로세싱 챔버, 상기 제 2 웨이퍼 프로세싱 챔버, 상기 제 3 웨이퍼 프로세싱 챔버, 및 상기 제 4 웨이퍼 프로세싱 챔버 사이로 수송하도록 구성되고; 그리고
상기 제 2 멀티-웨이퍼 카세트는 상기 하나 이상의 멀티-웨이퍼 카세트들 중 하나인, 장치. - 제 31 항에 있어서,
하나 이상의 수직 로봇 암 컨베이어들;
상기 웨이퍼 프로세싱 챔버들 중 제 5 웨이퍼 프로세싱 챔버;
상기 웨이퍼 프로세싱 챔버들 중 제 6 웨이퍼 프로세싱 챔버;
상기 웨이퍼 프로세싱 챔버들 중 제 7 웨이퍼 프로세싱 챔버; 및
상기 웨이퍼 프로세싱 챔버들 중 제 8 웨이퍼 프로세싱 챔버를 더 포함하고,
상기 제 5 웨이퍼 프로세싱 챔버, 상기 제 6 웨이퍼 프로세싱 챔버, 상기 제 7 웨이퍼 프로세싱 챔버, 및 상기 제 8 웨이퍼 프로세싱 챔버는, 상기 제 1 웨이퍼 프로세싱 챔버, 상기 제 2 웨이퍼 프로세싱 챔버, 상기 제 3 웨이퍼 프로세싱 챔버, 및 상기 제 4 웨이퍼 프로세싱 챔버 위에 위치되고,
상기 하나 이상의 수직 로봇 암 컨베이어들 각각은 이웃한 수직 웨이퍼 카세트 컨베이어들 사이에 개재되고,
상기 수직 로봇 암 컨베이어 각각은 상기 하나 이상의 로봇 암들 중 대응하는 로봇 암을 상기 수직 축을 따라 하나 이상의 수직 로봇 암 위치들로 병진시키도록 구성되고,
상기 하나 이상의 수직 로봇 암 위치들 중 제 1 수직 로봇 암 위치는 상기 제 1 수직 카세트 위치와 연관되고,
상기 하나 이상의 수직 로봇 암 위치들 중 제 2 수직 로봇 암 위치는 상기 제 1 수직 카세트 위치와 상이한 상기 하나 이상의 수직 카세트 위치들 중 제 2 수직 카세트 위치와 연관되고,
상기 제 1 로봇 암은, 상기 제 1 멀티-웨이퍼 카세트가 상기 제 1 수평 위치 및 상기 제 1 수직 카세트 위치에 위치되고 그리고 상기 제 1 로봇 암이 상기 제 1 수직 로봇 암 위치에 위치될 때, 상기 반도체 웨이퍼들을 상기 제 1 멀티-웨이퍼 카세트와 상기 제 1 웨이퍼 프로세싱 챔버, 상기 제 2 웨이퍼 프로세싱 챔버, 상기 제 3 웨이퍼 프로세싱 챔버, 및 상기 제 4 웨이퍼 프로세싱 챔버 사이로 수송하도록 구성되고, 그리고
상기 제 1 로봇 암은, 상기 제 1 멀티-웨이퍼 카세트가 상기 제 1 수평 위치 및 상기 제 2 수직 카세트 위치에 위치되고 그리고 상기 제 1 로봇 암이 상기 제 2 수직 로봇 암 위치에 위치될 때, 상기 반도체 웨이퍼들을 상기 제 1 멀티-웨이퍼 카세트와 상기 제 5 웨이퍼 프로세싱 챔버, 상기 제 6 웨이퍼 프로세싱 챔버, 상기 제 7 웨이퍼 프로세싱 챔버, 및 상기 제 8 웨이퍼 프로세싱 챔버 사이로 수송하도록 더 구성되는, 장치. - 제 32 항에 있어서,
상기 웨이퍼 프로세싱 챔버들 중 제 9 웨이퍼 프로세싱 챔버;
상기 웨이퍼 프로세싱 챔버들 중 제 10 웨이퍼 프로세싱 챔버;
상기 웨이퍼 프로세싱 챔버들 중 제 11 웨이퍼 프로세싱 챔버;
상기 웨이퍼 프로세싱 챔버들 중 제 12 웨이퍼 프로세싱 챔버;
상기 웨이퍼 프로세싱 챔버들 중 제 13 웨이퍼 프로세싱 챔버;
상기 웨이퍼 프로세싱 챔버들 중 제 14 웨이퍼 프로세싱 챔버;
상기 웨이퍼 프로세싱 챔버들 중 제 15 웨이퍼 프로세싱 챔버; 및
상기 웨이퍼 프로세싱 챔버들 중 제 16 웨이퍼 프로세싱 챔버를 더 포함하고,
상기 제 9 웨이퍼 프로세싱 챔버, 상기 제 10 웨이퍼 프로세싱 챔버, 상기 제 13 웨이퍼 프로세싱 챔버, 및 상기 제 14 웨이퍼 프로세싱 챔버는 상기 수평 웨이퍼 카세트 컨베이어의 상기 제 1 측면 상에 위치되고,
상기 제 11 웨이퍼 프로세싱 챔버, 상기 제 12 웨이퍼 프로세싱 챔버, 상기 제 15 웨이퍼 프로세싱 챔버, 및 상기 제 16 웨이퍼 프로세싱 챔버는 상기 수평 웨이퍼 카세트 컨베이어의 상기 제 2 측면 상에 위치되고,
상기 제 13 웨이퍼 프로세싱 챔버, 상기 제 14 웨이퍼 프로세싱 챔버, 상기 제 15 웨이퍼 프로세싱 챔버, 및 상기 제 16 웨이퍼 프로세싱 챔버는 상기 제 9 웨이퍼 프로세싱 챔버, 상기 제 10 웨이퍼 프로세싱 챔버, 상기 제 11 웨이퍼 프로세싱 챔버, 및 상기 제 12 웨이퍼 프로세싱 챔버 위에 위치되고,
상기 제 2 수평 위치는 상기 하나 이상의 로봇 암들 중 상기 제 1 로봇 암과 제 2 로봇 암 사이에 개재되고,
상기 제 2 로봇 암은, 상기 제 2 멀티-웨이퍼 카세트가 상기 제 2 수평 위치 및 상기 제 1 수직 카세트 위치에 위치되고 그리고 상기 제 2 로봇 암이 상기 제 1 수직 로봇 암 위치에 위치될 때, 상기 반도체 웨이퍼들을 상기 제 2 멀티-웨이퍼 카세트와 상기 제 9 웨이퍼 프로세싱 챔버, 상기 제 10 웨이퍼 프로세싱 챔버, 상기 제 11 웨이퍼 프로세싱 챔버, 및 상기 제 12 웨이퍼 프로세싱 챔버 사이로 수송하도록 구성되고, 그리고
상기 제 2 로봇 암은, 상기 제 2 멀티-웨이퍼 카세트가 상기 제 2 수평 위치 및 상기 제 2 수직 카세트 위치에 위치되고 그리고 상기 제 2 로봇 암이 제 2 수직 로봇 암 위치에 위치될 때, 상기 반도체 웨이퍼들을 상기 제 2 멀티-웨이퍼 카세트와 상기 제 13 웨이퍼 프로세싱 챔버, 상기 제 14 웨이퍼 프로세싱 챔버, 상기 제 15 웨이퍼 프로세싱 챔버, 및 상기 제 16 웨이퍼 프로세싱 챔버 사이로 수송하도록 더 구성되는, 장치. - 제 33 항에 있어서,
상기 적어도 하나의 버퍼 가스 마이크로클라이메이트 시스템은 상기 하나 이상의 엔드 이펙터들에 의해 지지된 상기 반도체 웨이퍼들의 대면 표면들에 걸쳐 버퍼 가스를 흘리도록 구성된 상기 하나 이상의 버퍼 가스 분배기들을 포함하고,
상기 하나 이상의 버퍼 가스 분배기들 각각은 상기 하나 이상의 엔드 이펙터들 중 상이한 엔드 이펙터와 연관되고,
상기 버퍼 가스 분배기 각각은 상기 로봇 암의 적어도 일부의 이동 동안 상기 연관된 엔드 이펙터와 연계하여 이동하도록 구성되고, 상기 연관된 엔드 이펙터는 상기 로봇 암의 부분이고,
상기 각각의 버퍼 가스 분배기 및 상기 연관된 엔드 이펙터는, N 개의 반도체 웨이퍼들이 상기 N 개의 웨이퍼 지지 구조체들에 의해 지지될 때 상기 버퍼 가스 분배기 및 상기 연관된 엔드 이펙터가 상기 N 개의 웨이퍼 지지 구조체들에 의해 지지된 상기 N 개의 반도체 웨이퍼들의 스택 내로 삽입 가능하도록 이격되고,
상기 각각의 버퍼 가스 분배기 및 상기 연관된 엔드 이펙터는 각각 상기 N 개의 반도체 웨이퍼들의 상기 스택 내의 웨이퍼 사이의 갭들 내에 피팅되도록 사이징되는, 장치. - 제 26 항에 있어서,
상기 하나 이상의 멀티-웨이퍼 카세트들 중 적어도 하나를 수용하도록 그리고 수평 축을 따라 수평 위치들 사이에서 상기 수용된 상기 하나 이상의 멀티-웨이퍼 카세트들 중 적어도 하나를 병진시키도록 구성된 수평 웨이퍼 카세트 컨베이어를 더 포함하고,
상기 웨이퍼 프로세싱 챔버들은 상기 수평 웨이퍼 카세트 컨베이어의 양측 상에 이격된 위치들에 위치되고, 그리고
상기 하나 이상의 로봇 암들 중 제 1 로봇 암은, 제 1 멀티-웨이퍼 카세트가 적어도 상기 수평 위치들 중 제 1 수평 위치에 위치될 때, 상기 반도체 웨이퍼들을 상기 하나 이상의 멀티-웨이퍼 카세트들 중 상기 제 1 멀티-웨이퍼 카세트와 상기 웨이퍼 프로세싱 챔버들 중 제 1 웨이퍼 프로세싱 챔버, 상기 웨이퍼 프로세싱 챔버들 중 제 2 웨이퍼 프로세싱 챔버, 상기 웨이퍼 프로세싱 챔버들 중 제 3 웨이퍼 프로세싱 챔버, 및 상기 웨이퍼 프로세싱 챔버들 중 제 4 웨이퍼 프로세싱 챔버 사이로 수송하도록 구성되고,
상기 제 1 로봇 암은 상기 하나 이상의 버퍼 가스 분배기들 중 제 1 버퍼 가스 분배기와 연관되고,
상기 제 1 웨이퍼 프로세싱 챔버 및 상기 제 2 웨이퍼 프로세싱 챔버는 상기 수평 웨이퍼 카세트 컨베이어의 제 1 측면 상에 위치되고,
상기 제 3 웨이퍼 프로세싱 챔버 및 상기 제 4 웨이퍼 프로세싱 챔버는 상기 수평 웨이퍼 카세트 컨베이어의 제 2 측면 상에 위치되고, 그리고
상기 수평 웨이퍼 카세트 컨베이어의 상기 제 1 측면은 상기 수평 웨이퍼 카세트 컨베이어의 상기 제 2 측면으로부터 상기 수평 웨이퍼 카세트 컨베이어의 반대편의 측면 상에 있는, 장치. - 제 35 항에 있어서,
하나 이상의 수직 웨이퍼 카세트 컨베이어들을 더 포함하고,
상기 수직 웨이퍼 카세트 컨베이어 각각은 수평 위치들 중 상이한 수평 위치와 연관되고;
상기 하나 이상의 수직 웨이퍼 카세트 컨베이어들 중 제 1 수직 웨이퍼 카세트 컨베이어는 상기 제 1 수평 위치와 연관되고;
상기 수직 웨이퍼 카세트 컨베이어 각각은 하나 이상의 기계적 인터페이스들을 포함하고;
상기 수직 웨이퍼 카세트 컨베이어 각각의 상기 기계적 인터페이스 각각은, 상기 기계적 인터페이스가 상기 멀티-웨이퍼 카세트와 수직으로 정렬되고 그리고 상기 멀티-웨이퍼 카세트가 상기 수직 웨이퍼 카세트 컨베이어와 연관된 상기 수평 위치에 위치되고 그리고 기준 수직 위치에 상기 수평 웨이퍼 카세트 컨베이어에 의해 지지될 때, 상기 하나 이상의 멀티-웨이퍼 카세트들 중 일 멀티-웨이퍼 카세트와 인터페이싱하도록 구성되고;
상기 수직 웨이퍼 카세트 컨베이어 각각은, 상기 수직 웨이퍼 카세트 컨베이어에 포함된 상기 하나 이상의 기계적 인터페이스들, 및 상기 하나 이상의 기계적 인터페이스들이 인터페이싱되는 상기 멀티-웨이퍼 카세트 각각을 수직 축을 따라 하나 이상의 수직 카세트 위치들로 병진시키도록 구성되고;
상기 수직 카세트 위치들은 상기 기준 수직 위치와 동일한 높이에 위치되지 않고; 그리고
상기 제 1 로봇 암은, 상기 제 1 멀티-웨이퍼 카세트가 상기 제 1 수평 위치에 위치되고 그리고 또한 상기 제 1 수직 웨이퍼 카세트 컨베이어에 의해 상기 하나 이상의 수직 카세트 위치들 중 제 1 수직 카세트 위치에 위치될 때, 상기 반도체 웨이퍼들을 상기 제 1 멀티-웨이퍼 카세트와 상기 제 1 웨이퍼 프로세싱 챔버, 상기 제 2 웨이퍼 프로세싱 챔버, 상기 제 3 웨이퍼 프로세싱 챔버, 및 상기 제 4 웨이퍼 프로세싱 챔버 사이로 수송하도록 구성되는, 장치. - 제 36 항에 있어서,
상기 기계적 인터페이스 각각은 적어도 하나의 버퍼 가스 포트를 포함하고,
상기 멀티-웨이퍼 카세트 각각은 적어도 하나의 버퍼 가스 유입부를 포함하고, 그리고
상기 멀티-웨이퍼 카세트 각각의 상기 적어도 하나의 버퍼 가스 유입부는, 상기 멀티-웨이퍼 카세트가 상기 기계적 인터페이스와 인터페이싱될 때 상기 기계적 인터페이스 각각의 상기 적어도 하나의 버퍼 가스 포트와 정렬되어, 버퍼 가스로 하여금 상기 적어도 하나의 버퍼 가스 포트 및 상기 적어도 하나의 버퍼 가스 유입부를 통해 상기 멀티-웨이퍼 카세트의 내부 볼륨으로 도입되게 하는, 장치. - 제 36 항에 있어서,
상기 하나 이상의 수직 웨이퍼 카세트 컨베이어들 중 제 2 수직 웨이퍼 카세트 컨베이어는 상기 수평 위치들 중 제 2 수평 위치와 연관되고;
상기 제 1 로봇 암은 상기 제 1 수평 위치와 상기 제 2 수평 위치 사이에 개재되고;
상기 멀티-웨이퍼 카세트 각각은 또한 상기 반도체 웨이퍼들로 하여금 상기 멀티-웨이퍼 카세트 내로 삽입되거나 상기 멀티-웨이퍼 카세트로부터 철수되게 하도록 또한 사이징되고 그리고 상기 멀티-웨이퍼 카세트의 상기 정면 개구에 반대편에 있는 후면 개구를 포함하고;
상기 제 1 로봇 암은, 또한 제 2 멀티-웨이퍼 카세트가 상기 제 2 수직 웨이퍼 카세트 컨베이어에 의해 상기 제 1 수직 카세트 위치에 그리고 상기 제 2 수평 위치에 위치될 때, 상기 반도체 웨이퍼들을 상기 제 2 멀티-웨이퍼 카세트와 상기 제 1 웨이퍼 프로세싱 챔버, 상기 제 2 웨이퍼 프로세싱 챔버, 상기 제 3 웨이퍼 프로세싱 챔버, 및 상기 제 4 웨이퍼 프로세싱 챔버 사이로 수송하도록 구성되고; 그리고
상기 제 2 멀티-웨이퍼 카세트는 상기 하나 이상의 멀티-웨이퍼 카세트들 중 하나인, 장치. - 제 38 항에 있어서,
하나 이상의 수직 로봇 암 컨베이어들;
상기 웨이퍼 프로세싱 챔버들 중 제 5 웨이퍼 프로세싱 챔버;
상기 웨이퍼 프로세싱 챔버들 중 제 6 웨이퍼 프로세싱 챔버;
상기 웨이퍼 프로세싱 챔버들 중 제 7 웨이퍼 프로세싱 챔버; 및
상기 웨이퍼 프로세싱 챔버들 중 제 8 웨이퍼 프로세싱 챔버를 더 포함하고,
상기 제 5 웨이퍼 프로세싱 챔버, 상기 제 6 웨이퍼 프로세싱 챔버, 상기 제 7 웨이퍼 프로세싱 챔버, 및 상기 제 8 웨이퍼 프로세싱 챔버는, 상기 제 1 웨이퍼 프로세싱 챔버, 상기 제 2 웨이퍼 프로세싱 챔버, 상기 제 3 웨이퍼 프로세싱 챔버, 및 상기 제 4 웨이퍼 프로세싱 챔버 위에 위치되고,
상기 하나 이상의 수직 로봇 암 컨베이어들 각각은 이웃한 수직 웨이퍼 카세트 컨베이어들 사이에 개재되고,
상기 수직 로봇 암 컨베이어 각각은 상기 하나 이상의 로봇 암들 중 대응하는 로봇 암을 상기 수직 축을 따라 하나 이상의 수직 로봇 암 위치들로 병진시키도록 구성되고,
상기 하나 이상의 수직 로봇 암 위치들 중 제 1 수직 로봇 암 위치는 상기 제 1 수직 카세트 위치와 연관되고,
상기 하나 이상의 수직 로봇 암 위치들 중 제 2 수직 로봇 암 위치는 상기 제 1 수직 카세트 위치와 상이한 상기 하나 이상의 수직 카세트 위치들 중 제 2 수직 카세트 위치와 연관되고,
상기 제 1 로봇 암은, 상기 제 1 멀티-웨이퍼 카세트가 상기 제 1 수평 위치 및 상기 제 1 수직 카세트 위치에 위치되고 그리고 상기 제 1 로봇 암이 상기 제 1 수직 로봇 암 위치에 위치될 때, 상기 반도체 웨이퍼들을 상기 제 1 멀티-웨이퍼 카세트와 상기 제 1 웨이퍼 프로세싱 챔버, 상기 제 2 웨이퍼 프로세싱 챔버, 상기 제 3 웨이퍼 프로세싱 챔버, 및 상기 제 4 웨이퍼 프로세싱 챔버 사이로 수송하도록 구성되고, 그리고
상기 제 1 로봇 암은, 상기 제 1 멀티-웨이퍼 카세트가 상기 제 1 수평 위치 및 상기 제 2 수직 카세트 위치에 위치되고 그리고 상기 제 1 로봇 암이 상기 제 2 수직 로봇 암 위치에 위치될 때, 상기 반도체 웨이퍼들을 상기 제 1 멀티-웨이퍼 카세트와 상기 제 5 웨이퍼 프로세싱 챔버, 상기 제 6 웨이퍼 프로세싱 챔버, 상기 제 7 웨이퍼 프로세싱 챔버, 및 상기 제 8 웨이퍼 프로세싱 챔버 사이로 수송하도록 더 구성되는, 장치. - 제 39 항에 있어서,
상기 웨이퍼 프로세싱 챔버들 중 제 9 웨이퍼 프로세싱 챔버;
상기 웨이퍼 프로세싱 챔버들 중 제 10 웨이퍼 프로세싱 챔버;
상기 웨이퍼 프로세싱 챔버들 중 제 11 웨이퍼 프로세싱 챔버;
상기 웨이퍼 프로세싱 챔버들 중 제 12 웨이퍼 프로세싱 챔버;
상기 웨이퍼 프로세싱 챔버들 중 제 13 웨이퍼 프로세싱 챔버;
상기 웨이퍼 프로세싱 챔버들 중 제 14 웨이퍼 프로세싱 챔버;
상기 웨이퍼 프로세싱 챔버들 중 제 15 웨이퍼 프로세싱 챔버; 및
상기 웨이퍼 프로세싱 챔버들 중 제 16 웨이퍼 프로세싱 챔버를 더 포함하고,
상기 제 9 웨이퍼 프로세싱 챔버, 상기 제 10 웨이퍼 프로세싱 챔버, 상기 제 13 웨이퍼 프로세싱 챔버, 및 상기 제 14 웨이퍼 프로세싱 챔버는 상기 수평 웨이퍼 카세트 컨베이어의 상기 제 1 측면 상에 위치되고,
상기 제 11 웨이퍼 프로세싱 챔버, 상기 제 12 웨이퍼 프로세싱 챔버, 상기 제 15 웨이퍼 프로세싱 챔버, 및 상기 제 16 웨이퍼 프로세싱 챔버는 상기 수평 웨이퍼 카세트 컨베이어의 상기 제 2 측면 상에 위치되고,
상기 제 13 웨이퍼 프로세싱 챔버, 상기 제 14 웨이퍼 프로세싱 챔버, 상기 제 15 웨이퍼 프로세싱 챔버, 및 상기 제 16 웨이퍼 프로세싱 챔버는 상기 제 9 웨이퍼 프로세싱 챔버, 상기 제 10 웨이퍼 프로세싱 챔버, 상기 제 11 웨이퍼 프로세싱 챔버, 및 상기 제 12 웨이퍼 프로세싱 챔버 위에 위치되고,
상기 제 2 수평 위치는 상기 하나 이상의 로봇 암들 중 상기 제 1 로봇 암과 제 2 로봇 암 사이에 개재되고,
상기 제 2 로봇 암은, 상기 제 2 멀티-웨이퍼 카세트가 상기 제 2 수평 위치 및 상기 제 1 수직 카세트 위치에 위치되고 그리고 상기 제 2 로봇 암이 상기 제 1 수직 로봇 암 위치에 위치될 때, 상기 반도체 웨이퍼들을 상기 제 2 멀티-웨이퍼 카세트와 상기 제 9 웨이퍼 프로세싱 챔버, 상기 제 10 웨이퍼 프로세싱 챔버, 상기 제 11 웨이퍼 프로세싱 챔버, 및 상기 제 12 웨이퍼 프로세싱 챔버 사이로 수송하도록 구성되고, 그리고
상기 제 2 로봇 암은, 상기 제 2 멀티-웨이퍼 카세트가 상기 제 2 수평 위치 및 상기 제 2 수직 카세트 위치에 위치되고 그리고 상기 제 2 로봇 암이 제 2 수직 로봇 암 위치에 위치될 때, 상기 반도체 웨이퍼들을 상기 제 2 멀티-웨이퍼 카세트와 상기 제 13 웨이퍼 프로세싱 챔버, 상기 제 14 웨이퍼 프로세싱 챔버, 상기 제 15 웨이퍼 프로세싱 챔버, 및 상기 제 16 웨이퍼 프로세싱 챔버 사이로 수송하도록 더 구성되는, 장치. - 제 40 항에 있어서,
상기 적어도 하나의 버퍼 가스 마이크로클라이메이트 시스템은 또한 상기 하나 이상의 멀티-웨이퍼 카세트들 각각의 부분인 상기 적어도 하나의 슬롯 도어 메커니즘을 포함하고,
상기 멀티-웨이퍼 카세트 각각은 상기 웨이퍼들로 하여금 상기 멀티-웨이퍼 카세트 내로 삽입되거나 상기 멀티-웨이퍼 카세트로부터 철수되게 하도록 사이징된 정면 개구를 갖고;
상기 슬롯 도어 메커니즘 각각은,
D 초과의 폭 및 (N-1)d 미만의 높이를 가진 수평 슬롯을 가진 도어, 및
기계적 입력에 응답하여, 상기 멀티-웨이퍼 카세트의 상기 웨이퍼 지지 구조체들에 대해 수직으로 상기 도어를 병진시키도록 구성된 구동 메커니즘을 포함하고 상기 슬롯 도어는 상기 멀티-웨이퍼 카세트의 부분이고,
상기 도어 각각은 (2N-1) d 초과의 높이를 갖고; 그리고
d 초과의 높이를 갖고; 그리고
상기 도어 각각은 상기 멀티-웨이퍼 카세트의 상기 정면 개구의 정면에 위치되고 상기 도어는 상기 멀티-웨이퍼 카세트의 부분인, 장치. - 반도체 프로세싱 툴을 위한 EFEM (equipment front end module) 에 있어서,
상기 EFEM은,
상기 EFEM의 내부 볼륨을 적어도 부분적으로 규정하는 하나 이상의 벽들;
상기 EFEM의 상기 내부 볼륨 내에서 웨이퍼들을 이동시키도록 구성된 웨이퍼 핸들링 로봇;
버퍼 가스 포트를 통해 상기 EFEM의 상기 내부 볼륨으로 공급된 버퍼 가스를 전달하도록 구성된 상기 버퍼 가스 포트;
상기 버퍼 가스 포트를 통한 상기 버퍼 가스의 플로우를 조절하도록 구성된 버퍼 가스 제어 밸브; 및
제어기를 포함하고,
상기 제어기는 메모리 그리고 상기 버퍼 가스 제어 밸브와 통신 가능하게 연결된 하나 이상의 프로세서들을 포함하고, 상기 메모리는 상기 제어기로 하여금,
상기 웨이퍼가 상기 로봇에 의해 상기 내부 볼륨 내에서 이동될 때를 결정하고,
적어도 부분적으로 상기 웨이퍼가 상기 로봇에 의해 상기 EFEM의 상기 내부 볼륨 내에서 이동된다는 결정에 응답하여, 상기 버퍼 가스가 상기 EFEM의 상기 내부 볼륨 내로 흐르게 하도록 상기 버퍼 가스 제어 밸브를 제 1 플로우 상태로 전이시키고,
상기 웨이퍼가 상기 로봇에 의해 상기 EFEM의 상기 내부 볼륨 내에서 이동되지 않을 때를 결정하고, 그리고
적어도 부분적으로 상기 웨이퍼가 상기 로봇에 의해 상기 EFEM의 상기 내부 볼륨 내에서 이동되지 않는다는 결정에 응답하여, 상기 버퍼 가스 제어 밸브를 상기 버퍼 가스의 플로우 레이트가 상기 제 1 플로우 상태에서보다 낮은 제 2 플로우 상태로 전이시키게 하기 위한 컴퓨터-실행가능한 인스트럭션들을 포함하는, EFEM. - 제 42 항에 있어서,
상기 EFEM은 상기 EFEM의 상기 내부 볼륨을 통한 설비 공기의 플로우를 조절하도록 구성된 설비 공기 제어 밸브를 더 포함하고,
상기 설비 공기 제어 밸브는 상기 제어기의 상기 하나 이상의 프로세서들과 통신 가능하게 연결되고, 그리고
상기 메모리는 상기 제어기로 하여금,
적어도 부분적으로 상기 웨이퍼가 상기 로봇에 의해 상기 EFEM의 상기 내부 볼륨 내에서 이동되지 않는다는 결정에 응답하여, 상기 설비 공기가 상기 EFEM의 상기 내부 볼륨 내로 흐르게 하도록 상기 설비 공기 제어 밸브를 제 3 플로우 상태로 전이시키고, 그리고
적어도 부분적으로 상기 웨이퍼가 상기 로봇에 의해 상기 EFEM의 상기 내부 볼륨 내에서 이동된다는 결정에 응답하여, 상기 설비 공기 제어 밸브를 상기 설비 공기의 플로우 레이트가 상기 제 3 플로우 상태에서보다 낮은 제 4 플로우 상태로 전이시키게 하기 위한 컴퓨터-실행가능한 인스트럭션들을 더 포함하는, EFEM. - 제 42 항에 있어서,
상기 EFEM은,
상기 웨이퍼들이 하나 이상의 FOUP들 (front-opening unified pods) 중 하나의 FOUP로부터 상기 EFEM의 내부 볼륨 내로 또는 상기 EFEM의 상기 내부 볼륨으로부터 상기 하나 이상의 FOUP들 중 하나의 FOUP로 이송될 수도 있도록, 상기 하나 이상의 FOUP들과 인터페이싱하도록 구성된 하나 이상의 로딩 인터페이스들; 및
상기 웨이퍼들이 상기 EFEM의 상기 내부 볼륨으로부터 상기 반도체 프로세싱 툴의 프로세싱 영역 내로 또는 상기 반도체 프로세싱 툴의 상기 프로세싱 영역으로부터 상기 EFEM의 상기 내부 볼륨 내로 이송될 수도 있는 하나 이상의 로드록들과 인터페이싱하도록 구성된 하나 이상의 로드록 인터페이스들을 더 포함하는, EFEM. - 제 42 항에 있어서,
상기 로봇은 복수의 반도체 웨이퍼들을 동시에 지지하도록 구성되는 멀티-웨이퍼 엔드 이펙터를 포함하는, EFEM. - 반도체 프로세싱 툴을 위한 EFEM (equipment front end module) 에 있어서,
상기 EFEM은,
상기 EFEM의 내부 볼륨을 적어도 부분적으로 규정하는 하나 이상의 벽들;
상기 EFEM의 상기 내부 볼륨을 제 1 내부 서브-볼륨과 제 2 내부 서브-볼륨으로 분할하는 하나 이상의 분할 벽들;
버퍼 가스 포트를 통해 상기 제 2 내부 서브-볼륨으로 공급된 버퍼 가스를 전달하도록 구성된 상기 버퍼 가스 포트;
상기 제 1 내부 서브-볼륨 내에서 상기 웨이퍼들을 이동시키도록 구성된 제 1 웨이퍼 핸들링 로봇;
상기 제 2 내부 서브-볼륨 내에서 상기 웨이퍼들을 이동시키도록 구성된 제 2 웨이퍼 핸들링 로봇;
상기 제 1 내부 서브-볼륨을 통해 설비 공기를 흘리도록 구성된 제 1 가스 핸들러; 및
상기 제 2 내부 서브-볼륨을 통해 상기 버퍼 가스를 흘리도록 구성된 제 2 가스 핸들러를 포함하는, EFEM. - 반도체 프로세싱 툴을 위한 웨이퍼 핸들링 로봇에 있어서,
상기 웨이퍼 핸들링 로봇은,
로봇 암;
반도체 웨이퍼를 지지하도록 구성된 엔드 이펙터; 및
상기 반도체 웨이퍼가 상기 엔드 이펙터에 의해 지지될 때 상기 반도체 웨이퍼의 상부 표면에 걸쳐 버퍼 가스를 흘리도록 구성된 버퍼 가스 분배기를 포함하고,
상기 엔드 이펙터는 상기 로봇 암의 단부에 위치되고,
상기 버퍼 가스 분배기는 상기 로봇 암에 의해 직접적으로 또는 간접적으로 지지되고, 그리고
상기 버퍼 가스 분배기는 상기 로봇 암의 적어도 일부의 이동 동안 상기 엔드 이펙터와 연계하여 이동하도록 구성되는, 웨이퍼 핸들링 로봇. - 제 47 항에 있어서,
상기 버퍼 가스 분배기는,
가스 분배 패들 (paddle); 및
지지 암을 포함하고,
상기 가스 분배 패들은 상기 엔드 이펙터를 향하고, 그리고 상기 엔드 이펙터로부터 오프셋된 제 1 표면을 갖고,
상기 제 1 표면은 상기 버퍼 가스를 상기 엔드 이펙터를 향하여 지향시키도록 구성된 하나 이상의 버퍼 가스 분배 포트들을 포함하고, 그리고
상기 지지 암은 상기 가스 분배 패들을 지지하고 그리고 상기 로봇 암에 의해 지지되는, 웨이퍼 핸들링 로봇. - 제 48 항에 있어서,
상기 가스 분배 패들은 실질적으로 원형 형상을 갖고 그리고 상기 엔드 이펙터가 지지하도록 구성되는 상기 반도체 웨이퍼의 직경의 ± 10 %보다 큰 외경을 갖는, 웨이퍼 핸들링 로봇. - 제 49 항에 있어서,
회전 피봇을 더 포함하고,
상기 회전 피봇은 상기 지지 암을 상기 로봇 암과 연결하고 (join), 그리고
상기 회전 피봇은, 상기 엔드 이펙터가 상기 반도체 웨이퍼를 지지할 때 상기 가스 분배 패들이 상기 반도체 웨이퍼 위에 중심이 위치되는 제 1 위치로부터 상기 엔드 이펙터가 상기 반도체 웨이퍼를 지지할 때 상기 가스 분배 패들이 상기 반도체 웨이퍼 위에 중심이 위치되지 않는 제 2 위치로 상기 가스 분배 패들을 회전시키도록 구성되는, 웨이퍼 핸들링 로봇. - 제 49 항에 있어서,
병진 메커니즘을 더 포함하고,
상기 병진 메커니즘은 상기 지지 암을 상기 로봇 암과 연결하고 (join), 그리고
상기 병진 메커니즘은, 상기 엔드 이펙터가 상기 반도체 웨이퍼를 지지할 때 상기 가스 분배 패들이 상기 반도체 웨이퍼 위에 중심이 위치되는 제 1 위치로부터 상기 엔드 이펙터가 상기 반도체 웨이퍼를 지지할 때 상기 가스 분배 패들이 상기 반도체 웨이퍼 위에 중심이 위치되지 않는 제 2 위치로 상기 가스 분배 패들을 병진시키도록 구성되는, 웨이퍼 핸들링 로봇. - 제 48 항에 있어서,
상기 가스 분배 패들은 상기 가스 분배 패들의 하나 이상의 측면들 상에 하나 이상의 측면 버퍼 가스 분배 포트들을 포함하고, 그리고
상기 측면 버퍼 가스 분배 포트들은 상기 엔드 이펙터에 의해 규정된 웨이퍼 지지면과 평행하게 ± 30° 내에서 하나 이상의 방향들로 상기 버퍼 가스를 흘리도록 구성되는, 웨이퍼 핸들링 로봇. - 반도체 제작에서 사용되는 FOUP (front opening unified pod) 와 인터페이싱하기 위한 장치에 있어서,
상기 FOUP는 이동식 FOUP 도어 및 수직 스택으로 배열된 복수의 웨이퍼 지지 구조체들을 포함하고, 상기 웨이퍼 지지 구조체 각각은 직경 D의 반도체 웨이퍼를 지지하도록 구성되고,
상기 장치는,
FOUP를 수용하도록 구성된 플랫폼;
D보다 큰 폭 및 상기 웨이퍼 지지 구조체들의 상기 수직 스택의 총 높이 미만의 높이를 가진 수평 슬롯을 포함한 도어;
상기 FOUP가 상기 플랫폼 상에 위치된 후에 상기 FOUP로부터 상기 이동식 FOUP 도어를 제거하도록 구성된 FIM (front-opening interface mechanism); 및
수직 축을 따라 상기 도어를 이동시키도록 구성된 구동 유닛을 포함하는, 장치. - 제 53 항에 있어서,
상기 수평 슬롯의 상기 높이는 상기 웨이퍼 지지 구조체들의 상기 수직 스택의 상기 총 높이의 50 % 미만인, 장치. - 제 53 항에 있어서,
상기 FOUP는 인접한 웨이퍼 지지 구조체들 사이에 평균 이격 거리를 갖고 그리고 상기 수평 슬롯의 상기 높이는 상기 평균 이격 거리의 300 % 미만인, 장치. - 제 53 항에 있어서,
상기 FOUP가 상기 플랫폼 상에 위치될 때 버퍼 가스를 상기 FOUP 내로 흘리도록 구성된 버퍼 가스 공급 포트를 더 포함하는, 장치. - 반도체 제작에서 사용되는 FOUP (front opening unified pod) 와 인터페이싱하기 위한 장치에 있어서,
상기 FOUP는 이동식 FOUP 도어 및 수직 스택으로 배열된 복수의 웨이퍼 지지 구조체들을 포함하고, 상기 웨이퍼 지지 구조체 각각은 직경 D의 반도체 웨이퍼를 지지하도록 구성되고,
상기 장치는,
FOUP를 수용하도록 구성된 플랫폼;
수직 축을 따라 상기 플랫폼을 이동시키도록 구성된 수직 구동 메커니즘;
D 초과의 폭 및 상기 웨이퍼 지지 구조체들의 상기 수직 스택의 총 높이 미만의 높이를 가진 수평 슬롯을 포함한 벽; 및
상기 FOUP가 상기 플랫폼 상에 위치된 후 그리고 상기 플랫폼이 FIM (front-opening interface mechanism) 과 상기 FOUP 도어를 정렬시키도록 수직으로 위치된 후에 상기 FOUP로부터 상기 이동식 FOUP 도어를 제거하도록 구성되는 FIM을 포함하는, 장치. - 제 53 항에 있어서,
상기 수평 슬롯의 상기 높이는 상기 웨이퍼 지지 구조체들의 상기 수직 스택의 상기 총 높이의 50 % 미만인, 장치. - 제 53 항에 있어서,
상기 FOUP는 인접한 웨이퍼 지지 구조체들 사이에 평균 이격 거리를 갖고 그리고 상기 수평 슬롯의 상기 높이는 상기 평균 이격 거리의 300 % 미만인, 장치. - 제 53 항에 있어서,
상기 FOUP는 인접한 웨이퍼 지지 구조체들 사이에 평균 이격 거리를 갖고 그리고 상기 수평 슬롯의 상기 높이는 상기 평균 이격 거리의 300 % 미만인, 장치. - 제 53 항에 있어서,
상기 FOUP가 상기 플랫폼 상에 위치될 때 버퍼 가스를 상기 FOUP 내로 흘리도록 구성된 버퍼 가스 공급 포트를 더 포함하는, 장치.
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562240404P | 2015-10-12 | 2015-10-12 | |
| US62/240,404 | 2015-10-12 | ||
| US201662286241P | 2016-01-22 | 2016-01-22 | |
| US62/286,241 | 2016-01-22 | ||
| US15/285,843 US10515834B2 (en) | 2015-10-12 | 2016-10-05 | Multi-station tool with wafer transfer microclimate systems |
| US15/285,843 | 2016-10-05 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170054226A true KR20170054226A (ko) | 2017-05-17 |
Family
ID=58635097
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160129591A KR20170054226A (ko) | 2015-10-12 | 2016-10-07 | 수평 슬롯 구현예들 및/또는 이동하는 샤워헤드들을 포함한, 웨이퍼 이송 미기후 기법들 및 장치들 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10515834B2 (ko) |
| JP (1) | JP2017108112A (ko) |
| KR (1) | KR20170054226A (ko) |
| CN (1) | CN107068601B (ko) |
| TW (1) | TW201727798A (ko) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180131492A (ko) * | 2017-05-31 | 2018-12-10 | 티디케이가부시기가이샤 | Efem 및 efem으로의 치환 가스 도입 방법 |
| KR20200116919A (ko) * | 2018-02-06 | 2020-10-13 | 로제 가부시키가이샤 | 박판 형상 기판 유지 장치 및 유지 장치를 구비하는 반송 로봇 |
| KR20210030286A (ko) * | 2018-07-13 | 2021-03-17 | 로제 가부시키가이샤 | 국소 퍼지 기능을 갖는 반송 장치 |
| KR20210068576A (ko) * | 2018-10-26 | 2021-06-09 | 어플라이드 머티어리얼스, 인코포레이티드 | 전면-덕트형 장비 전단부 모듈들, 측면 저장 포드들, 및 이들을 동작시키는 방법들 |
| KR102699857B1 (ko) * | 2023-04-17 | 2024-08-28 | 주식회사 동양기술 | 이상 감지 청정 유지 시스템 |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6099945B2 (ja) * | 2012-11-22 | 2017-03-22 | 東京エレクトロン株式会社 | 蓋開閉機構、遮蔽機構及び容器の内部パージ方法 |
| US10354908B2 (en) * | 2016-11-29 | 2019-07-16 | Taiwan Semiconductor Manufacturing Company, Ltd. | Semiconductor tool with a shield |
| JP7084385B2 (ja) * | 2017-05-11 | 2022-06-14 | ローツェ株式会社 | 薄板状基板保持フィンガ、及びこのフィンガを備える搬送ロボット |
| US10566216B2 (en) | 2017-06-09 | 2020-02-18 | Lam Research Corporation | Equipment front end module gas recirculation |
| US10403539B2 (en) * | 2017-08-04 | 2019-09-03 | Kawasaki Jukogyo Kabushiki Kaisha | Robot diagnosing method |
| CN108336002A (zh) * | 2018-03-16 | 2018-07-27 | 德淮半导体有限公司 | 清扫装置及清扫晶圆的方法、机械臂 |
| US11121014B2 (en) * | 2018-06-05 | 2021-09-14 | Asm Ip Holding B.V. | Dummy wafer storage cassette |
| JP7165754B2 (ja) * | 2018-06-07 | 2022-11-04 | エーシーエム リサーチ (シャンハイ) インコーポレーテッド | 半導体ウェハの洗浄装置及び洗浄方法 |
| CN112335030A (zh) * | 2018-06-18 | 2021-02-05 | 朗姆研究公司 | 占用面积减小的晶片搬运平台 |
| JP7061031B2 (ja) * | 2018-06-28 | 2022-04-27 | 株式会社日立ハイテク | 半導体ワーク搬送装置 |
| US11244844B2 (en) | 2018-10-26 | 2022-02-08 | Applied Materials, Inc. | High flow velocity, gas-purged, side storage pod apparatus, assemblies, and methods |
| JP7261000B2 (ja) * | 2018-12-03 | 2023-04-19 | キヤノン株式会社 | 容器、処理装置、異物除去方法、および物品の製造方法 |
| JP7341694B2 (ja) * | 2019-03-26 | 2023-09-11 | キヤノン株式会社 | 搬送装置、搬送方法、リソグラフィ装置、リソグラフィシステム、および物品製造方法 |
| JP7320369B2 (ja) * | 2019-04-17 | 2023-08-03 | 株式会社アルバック | 基板処理装置 |
| JP7323342B2 (ja) * | 2019-06-17 | 2023-08-08 | 株式会社ディスコ | 加工装置 |
| US11929273B2 (en) * | 2019-08-30 | 2024-03-12 | Taiwan Semiconductor Manufacturing Company Limited | Semiconductor fabrication system and method |
| EP4158682A1 (en) * | 2020-05-29 | 2023-04-05 | LPE S.p.A. | Tool for handling substrates with overhead screen and relevant handling methods and epitaxial reactor |
| US12002696B2 (en) * | 2020-06-30 | 2024-06-04 | Brooks Automation Us, Llc | Substrate mapping apparatus and method therefor |
| CN111958615A (zh) * | 2020-08-19 | 2020-11-20 | 西安奕斯伟硅片技术有限公司 | 一种用于搬送晶圆的组件及方法 |
| KR102610837B1 (ko) * | 2020-12-29 | 2023-12-06 | 세메스 주식회사 | 기판과 기판을 접합하기 위한 기판 접합 설비에서의 기판 보관 및 정렬 장치 |
| US20230138326A1 (en) * | 2021-10-28 | 2023-05-04 | Applied Materials, Inc. | Model-Based Controlled Load Lock Pumping Scheme |
Family Cites Families (76)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3105216A (en) * | 1960-12-19 | 1963-09-24 | Waters Mfg Inc | Potentiomerter |
| US4453785A (en) * | 1980-04-07 | 1984-06-12 | Smith Richard D | Modular cabinet for different video game cartridges, cassettes, and instruction booklets |
| US4306655A (en) * | 1980-04-07 | 1981-12-22 | Smith Richard D | Holder or container for tape cartridges |
| US5080549A (en) | 1987-05-11 | 1992-01-14 | Epsilon Technology, Inc. | Wafer handling system with Bernoulli pick-up |
| US5255970A (en) * | 1992-05-26 | 1993-10-26 | Theosabrata Yos S | Storage cabinet |
| US6645355B2 (en) * | 1996-07-15 | 2003-11-11 | Semitool, Inc. | Semiconductor processing apparatus having lift and tilt mechanism |
| US5720387A (en) * | 1997-01-15 | 1998-02-24 | Pantech International Inc. | Compact disk storage compartment |
| US6183183B1 (en) * | 1997-01-16 | 2001-02-06 | Asm America, Inc. | Dual arm linear hand-off wafer transfer assembly |
| US20010048866A1 (en) | 1997-12-01 | 2001-12-06 | Fumio Sakiya | Container and loader for substrate |
| US6501070B1 (en) * | 1998-07-13 | 2002-12-31 | Newport Corporation | Pod load interface equipment adapted for implementation in a fims system |
| US6427096B1 (en) | 1999-02-12 | 2002-07-30 | Honeywell International Inc. | Processing tool interface apparatus for use in manufacturing environment |
| US8348583B2 (en) | 1999-10-19 | 2013-01-08 | Rorze Corporation | Container and loader for substrate |
| JP3559213B2 (ja) | 2000-03-03 | 2004-08-25 | 株式会社半導体先端テクノロジーズ | ロードポート及びそれを用いた生産方式 |
| US6652212B2 (en) | 2000-05-02 | 2003-11-25 | Ckd Corporation | Cylinder, load port using it, and production system |
| US6540467B1 (en) * | 2001-06-18 | 2003-04-01 | Lsi Logic Corporation | Apparatus and method of semiconductor wafer protection |
| JP4219579B2 (ja) * | 2001-07-24 | 2009-02-04 | 東京エレクトロン株式会社 | ウエハ移載システム及びウエハ移載方法、並びに無人搬送車システム |
| JP4669643B2 (ja) | 2001-09-17 | 2011-04-13 | ローツェ株式会社 | ウエハマッピング装置およびそれを備えたロードポート |
| US7153079B2 (en) * | 2001-09-18 | 2006-12-26 | Murata Kikai Kabushiki Kaisha | Automated guided vehicle |
| JP2003092335A (ja) * | 2001-09-18 | 2003-03-28 | Toshiba Corp | 基板搬送装置、これを用いた基板処理装置および基板処理方法 |
| CN100499060C (zh) | 2001-11-14 | 2009-06-10 | 罗兹株式会社 | 晶片定位方法和装置,晶片加工系统及晶片定位装置的晶片座旋转轴定位方法 |
| WO2003049181A1 (fr) | 2001-12-04 | 2003-06-12 | Rorze Corporation | Dispositif destine aux operations temporaires de chargement, maintien et dechargement |
| JP2003170384A (ja) | 2001-12-04 | 2003-06-17 | Rorze Corp | 平板状物の搬送用スカラ型ロボットおよび平板状物の処理システム |
| JP4260423B2 (ja) | 2002-05-30 | 2009-04-30 | ローツェ株式会社 | 円盤状物の基準位置教示方法、位置決め方法および搬送方法並びに、それらの方法を使用する円盤状物の基準位置教示装置、位置決め装置、搬送装置および半導体製造設備 |
| JP4354675B2 (ja) | 2002-06-04 | 2009-10-28 | ローツェ株式会社 | 薄板状電子部品クリーン移載装置および薄板状電子製品製造システム |
| JPWO2003105216A1 (ja) * | 2002-06-07 | 2005-10-13 | 平田機工株式会社 | 容器搬送システム |
| US6929299B2 (en) * | 2002-08-20 | 2005-08-16 | Asm America, Inc. | Bonded structures for use in semiconductor processing environments |
| KR100497820B1 (ko) | 2003-01-06 | 2005-07-01 | 로체 시스템즈(주) | 유리판절단장치 |
| JP2004281580A (ja) * | 2003-03-13 | 2004-10-07 | Seiko Epson Corp | 搬送装置及び搬送方法 |
| JP4337059B2 (ja) | 2003-03-21 | 2009-09-30 | ローツェ システムズ コーポレーション | ガラス板切断装置 |
| WO2004085120A1 (ja) | 2003-03-25 | 2004-10-07 | Rorze Corporation | ロボットシミュレーション装置、および、シミュレーションプログラム |
| DE112004003075B4 (de) | 2003-07-17 | 2013-08-01 | Rorze Corp. | Filme mit niedriger Dielektrizitätskonstante und Herstellungsverfahren für diese Filme sowie elektronische Bauteile, die diese Filme verwenden |
| AU2003261993A1 (en) | 2003-09-08 | 2005-04-06 | Rorze Corporation | Linear motor |
| DE112004003055B4 (de) | 2003-10-22 | 2012-08-30 | Rorze Corp. | Flüssige Zusammensetzung mit dispergierten Diamantpartikeln, Herstellungsverfahren dafür und Verwendung zum Herstellen eines Abrasivstoffes |
| KR100555620B1 (ko) * | 2003-10-28 | 2006-03-03 | 주식회사 디엠에스 | 기판 운반시스템 및 운반방법 |
| US20060216137A1 (en) | 2004-07-02 | 2006-09-28 | Katsunori Sakata | Carrying apparatus and carrying control method for sheet-like substrate |
| JP4452279B2 (ja) | 2004-07-09 | 2010-04-21 | ローツェ株式会社 | 駆動源および搬送ロボット |
| JP2006228808A (ja) * | 2005-02-15 | 2006-08-31 | Seiko Epson Corp | 基板搬送装置、基板搬送方法及び半導体製造装置 |
| US20070209593A1 (en) | 2006-03-07 | 2007-09-13 | Ravinder Aggarwal | Semiconductor wafer cooling device |
| JP2007273510A (ja) * | 2006-03-30 | 2007-10-18 | Dainippon Screen Mfg Co Ltd | 基板処理装置およびその製造方法 |
| JP5226508B2 (ja) | 2006-05-16 | 2013-07-03 | ローツェ株式会社 | シャトル型搬送装置 |
| US20090016862A1 (en) * | 2007-07-12 | 2009-01-15 | Gould Richard H | Method and apparatus for providing flat panel display environmental isolation |
| KR101660992B1 (ko) | 2008-05-27 | 2016-09-28 | 로제 가부시키가이샤 | 반송 장치, 위치 교시 방법 및 센서 지그 |
| US8827695B2 (en) | 2008-06-23 | 2014-09-09 | Taiwan Semiconductor Manufacturing Company, Ltd. | Wafer's ambiance control |
| EP2292728B9 (en) | 2008-07-01 | 2016-07-20 | Rorze Corporation | Constant-temperature equipment |
| JP5711965B2 (ja) | 2008-07-01 | 2015-05-07 | ローツェ株式会社 | 恒温装置 |
| US7897525B2 (en) * | 2008-12-31 | 2011-03-01 | Archers Inc. | Methods and systems of transferring, docking and processing substrates |
| JP5279576B2 (ja) * | 2009-03-27 | 2013-09-04 | 大日本スクリーン製造株式会社 | 基板処理装置 |
| JP2013006222A (ja) | 2009-10-14 | 2013-01-10 | Rorze Corp | 薄板状物の把持装置、および薄板状物の把持方法 |
| WO2011065325A1 (ja) | 2009-11-27 | 2011-06-03 | ローツェ株式会社 | 搬送アーム、及びこれを備える搬送ロボット |
| WO2011136604A2 (ko) * | 2010-04-30 | 2011-11-03 | 주식회사 테라세미콘 | 기판 처리 장치 |
| JP5933450B2 (ja) | 2010-11-26 | 2016-06-08 | ローツェ株式会社 | ロボットの制御装置および制御方法 |
| JP6106176B2 (ja) * | 2011-09-14 | 2017-03-29 | ブルックス オートメーション インコーポレイテッド | ロードステーション |
| US9048271B2 (en) | 2011-09-29 | 2015-06-02 | Asm International N.V. | Modular semiconductor processing system |
| KR101258403B1 (ko) | 2011-12-09 | 2013-04-30 | 로체 시스템즈(주) | 강화유리 기판 절단방법 |
| KR101251880B1 (ko) | 2011-12-29 | 2013-04-08 | 로체 시스템즈(주) | 웨이퍼 식각장치 및 이를 이용한 웨이퍼 식각방법 |
| TWI725303B (zh) * | 2012-02-10 | 2021-04-21 | 美商布魯克斯自動機械公司 | 基材處理設備 |
| US8676375B2 (en) | 2012-02-27 | 2014-03-18 | Veeco Instruments Inc. | Automated cassette-to-cassette substrate handling system |
| CN104221136B (zh) | 2012-04-16 | 2017-05-31 | 日商乐华股份有限公司 | 收纳容器、收纳容器的开闭器开闭单元、及使用它们的晶圆储料器 |
| KR101355807B1 (ko) | 2012-09-11 | 2014-02-03 | 로체 시스템즈(주) | 비금속 재료의 곡선 절단방법 |
| US9275886B2 (en) | 2012-10-29 | 2016-03-01 | Rorze Corporation | Device and method for detecting position of semiconductor substrate |
| US20140119858A1 (en) * | 2012-10-31 | 2014-05-01 | Sandisk 3D Llc | Semiconductor Device Manufacturing Line |
| JP6099945B2 (ja) * | 2012-11-22 | 2017-03-22 | 東京エレクトロン株式会社 | 蓋開閉機構、遮蔽機構及び容器の内部パージ方法 |
| KR101372805B1 (ko) | 2012-11-30 | 2014-03-19 | 로체 시스템즈(주) | 웨이퍼 식각 시스템 및 이를 이용한 웨이퍼 식각 공정 |
| US9545724B2 (en) | 2013-03-14 | 2017-01-17 | Brooks Automation, Inc. | Tray engine with slide attached to an end effector base |
| JP6198043B2 (ja) | 2013-06-06 | 2017-09-20 | Tdk株式会社 | ロードポートユニット及びefemシステム |
| WO2015005192A1 (ja) | 2013-07-09 | 2015-01-15 | 株式会社日立国際電気 | 基板処理装置、ガスパージ方法、半導体装置の製造方法、及び異常処理プログラムが格納された記録媒体 |
| JP6268425B2 (ja) | 2013-07-16 | 2018-01-31 | シンフォニアテクノロジー株式会社 | Efem、ロードポート、ウェーハ搬送方法 |
| CN104347460B (zh) * | 2013-08-01 | 2017-03-15 | 中微半导体设备(上海)有限公司 | 晶圆传递腔室 |
| US20150088798A1 (en) * | 2013-09-23 | 2015-03-26 | Mastercard International Incorporated | Detecting behavioral patterns and anomalies using metadata |
| JP6032372B2 (ja) | 2013-09-26 | 2016-11-30 | 村田機械株式会社 | パージ装置及びパージ方法 |
| US9272315B2 (en) | 2013-10-11 | 2016-03-01 | Taiwan Semiconductor Manufacturing Co., Ltd | Mechanisms for controlling gas flow in enclosure |
| JP6287048B2 (ja) | 2013-10-23 | 2018-03-07 | Tdk株式会社 | 基板搬送方法 |
| TWI629744B (zh) | 2013-11-11 | 2018-07-11 | 昕芙旎雅股份有限公司 | Surrounding gas replacement device, substrate transfer device, substrate transfer system, and EFEM |
| TWI814621B (zh) | 2013-12-13 | 2023-09-01 | 日商昕芙旎雅股份有限公司 | 搬運室 |
| US10134621B2 (en) | 2013-12-17 | 2018-11-20 | Brooks Automation, Inc. | Substrate transport apparatus |
| JP6291878B2 (ja) | 2014-01-31 | 2018-03-14 | シンフォニアテクノロジー株式会社 | ロードポート及びefem |
-
2016
- 2016-10-05 US US15/285,843 patent/US10515834B2/en active Active
- 2016-10-07 KR KR1020160129591A patent/KR20170054226A/ko unknown
- 2016-10-07 TW TW105132498A patent/TW201727798A/zh unknown
- 2016-10-07 JP JP2016198583A patent/JP2017108112A/ja active Pending
- 2016-10-08 CN CN201610879720.9A patent/CN107068601B/zh active Active
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180131492A (ko) * | 2017-05-31 | 2018-12-10 | 티디케이가부시기가이샤 | Efem 및 efem으로의 치환 가스 도입 방법 |
| JP2018206875A (ja) * | 2017-05-31 | 2018-12-27 | Tdk株式会社 | Efem及びefemへの置換ガスの導入方法 |
| US11145529B2 (en) | 2017-05-31 | 2021-10-12 | Tdk Corporation | EFEM and method of introducing replacement gas thereinto |
| KR20200116919A (ko) * | 2018-02-06 | 2020-10-13 | 로제 가부시키가이샤 | 박판 형상 기판 유지 장치 및 유지 장치를 구비하는 반송 로봇 |
| KR20210030286A (ko) * | 2018-07-13 | 2021-03-17 | 로제 가부시키가이샤 | 국소 퍼지 기능을 갖는 반송 장치 |
| KR20210068576A (ko) * | 2018-10-26 | 2021-06-09 | 어플라이드 머티어리얼스, 인코포레이티드 | 전면-덕트형 장비 전단부 모듈들, 측면 저장 포드들, 및 이들을 동작시키는 방법들 |
| KR102699857B1 (ko) * | 2023-04-17 | 2024-08-28 | 주식회사 동양기술 | 이상 감지 청정 유지 시스템 |
Also Published As
| Publication number | Publication date |
|---|---|
| US10515834B2 (en) | 2019-12-24 |
| CN107068601B (zh) | 2020-06-16 |
| CN107068601A (zh) | 2017-08-18 |
| JP2017108112A (ja) | 2017-06-15 |
| US20170125272A1 (en) | 2017-05-04 |
| TW201727798A (zh) | 2017-08-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20170054226A (ko) | 수평 슬롯 구현예들 및/또는 이동하는 샤워헤드들을 포함한, 웨이퍼 이송 미기후 기법들 및 장치들 | |
| JP7263639B2 (ja) | 基板搬送部 | |
| US20240339340A1 (en) | Substrate processing apparatus for processing substrates | |
| US10930536B2 (en) | Workpiece stocker with circular configuration | |
| KR101518103B1 (ko) | 덮개 개폐 장치 | |
| JP2020077871A (ja) | 基材を処理するための基材処理装置 | |
| US20050111935A1 (en) | Apparatus and method for improved wafer transport ambient | |
| KR102626528B1 (ko) | 국소 퍼지 기능을 갖는 반송 장치 | |
| JP6706935B2 (ja) | 基板処理装置 | |
| TW202029387A (zh) | 晶圓儲存器 | |
| JPH10256346A (ja) | カセット搬出入機構及び半導体製造装置 | |
| JP2024023874A (ja) | 基板処理装置及び基板収納容器保管方法 | |
| JP4120285B2 (ja) | 被処理体の導入ポート機構及びこれを用いた処理システム | |
| KR101646824B1 (ko) | 기판 반송 설비 | |
| JP5279576B2 (ja) | 基板処理装置 | |
| JP2018093087A (ja) | 基板処理装置 | |
| KR980009066A (ko) | 반도체 기판 캐리어 이송 및 사용 방법 및 장치 | |
| KR102278078B1 (ko) | 기판 반송 장치 및 기판 처리 장치 | |
| JP7236411B2 (ja) | 搬送ユニット及びこれを有する基板処理装置 | |
| US20020153578A1 (en) | Wafer buffering system | |
| KR102719725B1 (ko) | 기판을 처리하기 위한 기판 처리 장치 | |
| KR20240046030A (ko) | 기판 반송 모듈 및 기판 반송 방법 | |
| JP5090291B2 (ja) | 基板処理装置 | |
| KR20230063970A (ko) | 기판 처리 장치 및 기판 처리 방법 | |
| KR20240079968A (ko) | 기판 처리 장치 및 기판 처리 방법 |