CN107068601B - 包括水平槽和/或移动喷头的晶片输送微气候技术和装置 - Google Patents
包括水平槽和/或移动喷头的晶片输送微气候技术和装置 Download PDFInfo
- Publication number
- CN107068601B CN107068601B CN201610879720.9A CN201610879720A CN107068601B CN 107068601 B CN107068601 B CN 107068601B CN 201610879720 A CN201610879720 A CN 201610879720A CN 107068601 B CN107068601 B CN 107068601B
- Authority
- CN
- China
- Prior art keywords
- wafer
- cassette
- vertical
- buffer gas
- processing chambers
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

























































Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68707—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a robot blade, or gripped by a gripper for conveyance
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/673—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere using specially adapted carriers or holders; Fixing the workpieces on such carriers or holders
- H01L21/6735—Closed carriers
- H01L21/67389—Closed carriers characterised by atmosphere control
- H01L21/67393—Closed carriers characterised by atmosphere control characterised by the presence of atmosphere modifying elements inside or attached to the closed carrierl
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67742—Mechanical parts of transfer devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67017—Apparatus for fluid treatment
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
- H01L21/02104—Forming layers
- H01L21/02107—Forming insulating materials on a substrate
- H01L21/02296—Forming insulating materials on a substrate characterised by the treatment performed before or after the formation of the layer
- H01L21/02299—Forming insulating materials on a substrate characterised by the treatment performed before or after the formation of the layer pre-treatment
- H01L21/02312—Forming insulating materials on a substrate characterised by the treatment performed before or after the formation of the layer pre-treatment treatment by exposure to a gas or vapour
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67126—Apparatus for sealing, encapsulating, glassing, decapsulating or the like
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67155—Apparatus for manufacturing or treating in a plurality of work-stations
- H01L21/67161—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the layout of the process chambers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67155—Apparatus for manufacturing or treating in a plurality of work-stations
- H01L21/67161—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the layout of the process chambers
- H01L21/67178—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the layout of the process chambers vertical arrangement
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67155—Apparatus for manufacturing or treating in a plurality of work-stations
- H01L21/6719—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the construction of the processing chambers, e.g. modular processing chambers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67155—Apparatus for manufacturing or treating in a plurality of work-stations
- H01L21/67201—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the construction of the load-lock chamber
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/673—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere using specially adapted carriers or holders; Fixing the workpieces on such carriers or holders
- H01L21/67346—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere using specially adapted carriers or holders; Fixing the workpieces on such carriers or holders characterized by being specially adapted for supporting a single substrate or by comprising a stack of such individual supports
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/673—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere using specially adapted carriers or holders; Fixing the workpieces on such carriers or holders
- H01L21/6735—Closed carriers
- H01L21/67389—Closed carriers characterised by atmosphere control
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
- H01L21/67715—Changing the direction of the conveying path
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
- H01L21/67736—Loading to or unloading from a conveyor
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67766—Mechanical parts of transfer devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67772—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading involving removal of lid, door, cover
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67778—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading involving loading and unloading of wafers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67778—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading involving loading and unloading of wafers
- H01L21/67781—Batch transfer of wafers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67784—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations using air tracks
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Robotics (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Manipulator (AREA)
Abstract
本发明公开了包括水平槽和/或移动喷头的晶片输送微气候技术和装置,具体公开了在半导体处理室的外部环境中形成半导体晶片周围的缓冲气体微气候的系统和技术。这样的系统可以包括槽门,其可允许单个晶片能从多晶片堆中移除同时限制缓冲气体从多晶片存储系统中的流出,以及缓冲气体分配器,其针对机械手臂的至少一些运动随着这些机械手臂一起运动,所述机械手臂用于运输晶片。
Description
技术领域
本发明涉及半导体处理领域,具体涉及包括水平槽和/或移动喷头的晶片输送微气候技术和装置。
背景技术
在半导体处理设施中,使用前开式统一标准匣(FOUP)将半导体晶片从半导体处理工具输送到半导体处理工具是常见的。FOUP通常包括容纳晶片支撑结构的竖直堆叠的承载架,例如,从壳体的侧壁突出的搁架,即支撑在间隔开的堆叠中的多个晶片。典型的FOUP可容纳25个或30个晶片,但具有其他容量的FOUP也是可行的。晶片典型地在FOUP内间隔开,使得晶片搬运机械手可以将端部执行器插入在堆叠中的相邻晶片之间并抬起晶片和收回晶片而不干扰其他晶片。
FOUP通常包括可被用来将FOUP与周围环境密封的可移除FOUP门;FOUP可以用保护FOUP内的晶片免受半导体处理设施内的周围环境的条件(例如水分或氧气)的损害的某种缓冲气体进行填充。例如,缓冲气体可以是洁净干燥的空气、氮气,或者被认为是设施空气以外的更期望的任何其它气体。但是,缓冲气体与通常流动通过EFEM的设施空气是不相同的。
发明内容
在附图和下面的说明中阐述本说明书中描述的主题的一个或多个实现方式的细节。其它特征、方面和优点将通过说明书、附图和权利要求变得显而易见。
在一些实现方式中,装置可设有机械手臂;端部执行器,其连接到所述机械手臂并配置成在所述机械手臂的运动期间支撑半导体晶片;以及缓冲气体分配器,其配置成当所述半导体晶片由所述端部执行器支撑时使缓冲气体流动跨越所述半导体晶片的面对表面。在这样的实现方式中,所述缓冲气体分配器可被配置成在所述机械手臂的至少一些运动期间随着所述端部执行器一起运动,所述缓冲气体分配器和端部执行器可沿竖直轴间隔开,使得所述端部执行器和所述缓冲气体分配器能插入沿垂直于所述半导体晶片的轴线排列的半导体晶片的堆叠中,以及所述缓冲气体分配器和所述端部执行器各自的尺寸可设定成配合在所述半导体晶片的堆中的晶片间的间隙内。
在一些额外的这样的实现方式中,所述缓冲气体分配器可以相对于所述端部执行器以间隔开的方式固定,并且可以在所述机械手臂的所有运动期间随着所述端部执行器一起运动。
在一些额外的或替代的这样的实现方式中,所述半导体晶片的阵列可具有由诸如下列设备组成的组中的设备的一个或多个部件的晶片支撑特征所限定的晶片间阵列的间距:前开式统一标准匣、晶片收容器、晶片缓冲器、装载锁、多晶片盒或并排多晶片盒。在一些进一步的这样的实现方式中,当所述半导体晶片由所述端部执行器和设备中的所述一个或多个部件的晶片支撑特征两者支撑时并且当所述缓冲气体分配器沿垂直于所述半导体晶片的第一方向观察时,所述缓冲气体分配器的与所述半导体晶片重叠的部分可具有当沿所述第一方向观察时与设备的所述一个或多个部件中的晶片支撑特征不重叠的形状。在一些进一步的这样的实现方式中,每个晶片支撑特征可具有面朝所述端部执行器的间隙;以及所述缓冲气体分配器在垂直于所述缓冲气体分配器的长轴的方向上的宽度可以比所述间隙小。
在该装置的一些实现方式中,当所述半导体晶片由所述端部执行器支撑时,所述缓冲气体分配器在与所述半导体晶片重叠的区域在沿垂直于所述半导体晶片的方向上的厚度可以不超过9毫米;以及所述缓冲气体分配器可以包括:底表面,其面朝所述端部执行器;顶表面,其朝向与所述缓冲气体分配器的所述底表面相对的方向;一个或多个侧表面,其跨越在所述缓冲气体分配器的顶表面和所述缓冲气体分配器的底表面之间;一个或多个第一气体分配端口,其布置在所述缓冲气体分配器的所述底表面上;多个第二气体分配端口,其布置在所述缓冲气体分配器的所述侧表面上;以及气体分配通道;其被配置成供给缓冲气体至所述一个或多个第一气体分配端口和所述多个第二气体分配端口。
在该装置的一些实现方式中,当所述半导体晶片由所述端部执行器支撑并且所述缓冲气体分配器沿垂直于所述半导体晶片的第一方向观察时,所述缓冲气体分配器可以不延伸跨越半导体晶片的全部。
在所述装置的一些进一步这样的实现方式中,当所述半导体晶片由所述端部执行器支撑时并且所述缓冲气体分配器沿垂直于所述半导体晶片的第一方向观察时,所述缓冲气体分配器可在穿过将所述端部执行器接合至所述机械手臂的机械接口与所述半导体晶片的中心轴线的第二方向上延伸跨越所述半导体晶片的直径的至少90%,以及可以在垂直于所述第一方向和所述第二方向的第三方向上仅部分地延伸跨越所述半导体晶片。
在该装置的一些实现方式中,当所述半导体晶片由所述端部执行器支撑时并且当沿平行于所述半导体晶片的轴线观察时,所述缓冲气体分配器的至少最外一半可以被配置成与所述半导体晶片不重叠。
在该装置的一些实现方式中,当所述半导体晶片由所述端部执行器支撑时,所述缓冲气体分配器的在所述半导体晶片上方延伸的部分可以被配置成一变在沿平行于所述半导体晶片的轴线观察时与所述半导体晶片不重叠。
在一些实现方式中,可提供一种用于处理半导体晶片的装置。在这样的实现方式中,该装置可包括外壳;接口,其被配置成支撑具有沿竖直轴以阵列排布的N个晶片支撑结构的多晶片存储系统,以及壁。所述晶片支撑结构可设定尺寸为支撑直径为D的半导体晶片,N可以是大于1的整数,并且每个半导体晶片支撑结构与所述阵列中的任何相邻的晶片支撑结构或多个晶片支撑结构可以以平均距离d间隔开;以及。所述壁可以包括具有宽度大于D和高度小于(N-1)·d的水平槽,所述壁可以具有大于(2·N-1)·d的高度,所述装置可以被配置成沿所述竖直轴提供所述水平槽和所述接口之间的相对平移,所述壁可以被定位成以便靠近所述多晶片存储系统的开口,当所述多晶片存储系统由所述接口支撑时,所述半导体晶片通过该开口能装载入所述多晶片存储系统或从所述多晶片存储系统卸载,以及当所述多晶片存储系统被所述接口支撑时,所述半导体晶片可以通过其被装载到所述多晶片存储系统中或从所述多晶片存储系统中卸载的所述壁可以提供所述多晶片存储系统的内部体积与所述外壳的内部体积之间的流限制屏障。
在一些这样的实现方式方式中,该装置可以进一步包括第一缓冲气体端口,其被配置成输送第一缓冲气体到所述外壳中;以及第二缓冲气体端口,其被配置成当所述多晶片存储系统由所述接口支撑时输送第二缓冲气体到所述多晶片存储系统中。
在一些额外的或替代的实现方式方式中,该装置可进一步包括机械手臂;端部执行器,其连接到所述机械手臂并配置成在所述机械手臂的运动期间支撑半导体晶片;以及缓冲气体分配器,其被配置成当所述半导体晶片由所述端部执行器支撑时使第一缓冲气体流动跨越所述半导体晶片的面对表面。在这样的实现方式中,所述缓冲气体分配器可以被配置成在所述机械手臂的至少一些运动期间随着所述端部执行器一起运动,所述缓冲气体分配器和所述端部执行器可以间隔开,使得当所述多晶片存储系统被安装在所述装置中并存储有所述半导体晶片时,所述端部执行器和所述缓冲气体分配器能通过水平槽插入并到由所述晶片支撑结构的阵列所支撑的半导体晶片的阵列中,以及所述缓冲气体分配器与所述端部执行器中的每个可以定尺寸为配合在所述半导体晶片的阵列中的晶片间的间隙内。
在一些实现方式中,该装置可以进一步包括第一缓冲气体端口,其被配置成输送第二缓冲气体到所述外壳中;以及第二缓冲气体端口,其被配置成当所述多晶片存储系统由所述接口支撑时输送第三缓冲气体到所述多晶片存储系统中。
在一些实现方式中,所述第一缓冲气体、所述第二缓冲气体和所述第三缓冲气体全部可通过设施氮气源的方式提供。
在一些实现方式中,所述缓冲气体分配器可以相对于所述端部执行器以间隔开的方式固定并可以在所述机械手臂的所有运动期间随着所述端部执行器一起移动。
在一些实现方式中,该装置还可以包括所述多晶片存储系统,并且所述多晶片存储系统由所述接口支撑。
在一些实现方式中,所述多晶片存储系统可以是前开式统一标准匣、晶片存储器、晶片缓冲器、多晶片盒或装载锁。
在一些实现方式中,该装置可进一步包括驱动机构,所述驱动机构被配置成使所述壁相对于所述外壳沿所述竖直轴平移;在其它或另外的这样的实现方式中,所述驱动机构可以被配置成使所述接口相对于所述外壳沿所述竖直轴平移或使所述接口和所述壁两者以相对于彼此的这样的方向平移。
在一些实现方式中,该装置可进一步包括机械手臂;以及端部执行器,其连接到所述机械手臂并被配置成在所述机械手臂的运动期间支撑半导体晶片。在一些实现方式中,所述水平槽可有具有沿所述竖直轴的第一尺寸的中间部分,所述第一尺寸大于沿所述水平槽的位于所述中间部分的相对侧上的侧翼部分的竖直轴的对应的第二尺寸,所述中间部分可以比所述端部执行器的配置成在所述机械手臂的运动期间支撑所述半导体晶片的部分的宽度更宽,所述端部执行器可具有配置成当所述半导体晶片由所述端部执行器支撑时接触半导体晶片的晶片接触表面,当所述半导体晶片由所述端部执行器支撑并且所述端部执行器在沿垂直于所述半导体晶片的方向上观察时,所述端部执行器可具有背朝所述晶片接触表面并位于所述半导体晶片的外周内的一个或多个第一底表面,以及所述第一尺寸可大于或等于所述第二尺寸加上所述端部执行器所述一个或多个第一底表面中的最底表面与所述晶片接触表面之间的竖直距离。
在一些这样的实现方式中,所述端部执行器可具有背朝所述一个或多个第一底表面并且当所述端部执行器用于将半导体晶片放置到所述多晶片存储系统中时穿过所述水平槽的一个或多个第一上表面,以及所述第一尺寸可以大于或等于所述端部执行器的所述一个或多个第一底表面中的所述最底表面与所述端部执行器的所述一个或多个第一上表面中的最上表面之间的竖直距离。
在该装置的一些实现方式中,该装置可进一步包括缓冲气体分配器,其被配置成当所述半导体晶片由所述端部执行器支撑时使缓冲气体流动跨越所述半导体晶片的面对表面。所述缓冲气体分配器可被配置成在所述机械手臂的至少一些运动期间随着所述端部执行器一起移动,所述缓冲气体分配器和端部执行器可间隔开,使得当所述多晶片存储系统安装在所述装置中并存储有所述半导体晶片时,所述端部执行器和所述缓冲气体分配器能插入由所述晶片支撑结构的阵列所支撑的所述半导体晶片的阵列中,所述缓冲气体分配器与所述端部执行器中的每个可定尺寸为配合到所述半导体晶片的阵列中的晶片间的间隙内,所述缓冲气体分配器可具有背朝所述一个或多个第一底面并且当所述端部执行器用于将半导体晶片从所述多晶片存储系统移除时穿过所述水平槽的一个或多个第一上表面,以及所述第一尺寸可以大于或等于所述端部执行器的所述一个或多个第一底表面中的所述最底表面与所述缓冲气体分配器的所述一个或多个第一上表面中的最上表面之间的竖直距离。
在一些实现方式中,可提供一种装置,该装置包括多个晶片处理室,其定位在不同的位置;底盘,其支撑在所述不同的位置上的所述晶片处理室;一个或多个多晶片盒,每个多晶片盒具有沿竖直轴布置的N个晶片支撑结构;一个或多个机械手臂,每个臂具有配置成在该机械手臂的运动期间支撑半导体晶片的端部执行器;以及至少一个缓冲气体微气候系统。所述缓冲气体微气候系统可包括:至少一个槽门机构,其是所述一个或多个多晶片盒中的每个的一部分;一个或多个缓冲气体分配器,其配置成使缓冲气体流动跨越由所述一个或多个端部执行器支撑的半导体晶片的面对表面,以及是所述一个或多个多晶片盒中的每个的一部分的至少一个槽门机构和被配置成使缓冲气体流动跨越由所述一个或多个端部执行器支撑的半导体晶片的面对表面的一个或多个缓冲气体分配器两者。在这样的实现方式中,所述一个或多个机械手臂可被配置成输送半导体晶片来往于所述一个或多个多晶片盒到所述多个晶片处理室,所述晶片支撑结构的尺寸可设为支撑直径为D的半导体晶片,N可以为大于1的整数,并且每个半导体晶片支撑结构与所述阵列中的任何相邻的晶片支撑结构或多个晶片支撑结构可以以平均距离d间隔开。
在装置的一些实现方式中,所述至少一个缓冲气体微气候系统可包括作为所述一个或多个多晶片盒中的每个的一部分的至少一个槽门机构。在一些实现方式中,每个多晶片盒可具有前开口,所述前开口的尺寸设为允许晶片被插入到所述多晶片盒或从所述多晶片盒取出;并且每个槽门机构可包括:门,其具有大于D的宽度和小于(N-1)·d的高度的水平槽;以及驱动机构,其被配置成响应于机械输入,使所述门相对于其中该槽门是其一部分的所述多晶片盒的所述晶片支撑结构竖直平移。每个门可具有大于(2·N-1)·d的高度;以及每个门被设置在其中该槽门是其一部分的所述多晶片盒的所述前开口的前面。
在一些实现方式中,所述至少一个缓冲气体微气候系统可包括被配置成使缓冲气体流动跨越由所述一个或多个端部执行器支撑的半导体晶片的面对表面的所述一个或多个缓冲气体分配器。在这样的实现方式中,所述一个或多个缓冲气体分配器中的每个可与所述一个或多个端部执行器中的不同的一个相关联,每个缓冲气体分配器可被配置成在其中所相关联的所述端部执行器是其一部分的所述机械手臂的至少一些运动期间随着所相关联的所述端部执行器一起运动,每个缓冲气体分配器和相关联的端部执行器可间隔开,使得当所述N个半导体晶片由所述N个晶片支撑结构支撑时,所述缓冲气体分配器和所相关联的所述端部执行器能插入由所述N个晶片支撑结构支撑的所述N个半导体晶片的堆叠中,以及每个缓冲气体分配器和相关联的端部执行器的每个的尺寸可设成配合在所述N个半导体晶片的堆叠的晶片间的间隙内。
在具有所述一个或多个缓冲气体分配器的所述装置的一些实现方式中,所述至少一个缓冲气体微气候系统还可包括可作为所述一个或多个多晶片盒中的每个的一部分的所述至少一个槽门机构。在这样的实现方式中,每个多晶片盒可具有前开口,所述前开口的尺寸设为允许晶片被插入到所述多晶片盒中或从所述多晶片盒取出;并且每个槽门机构可包括:门,其具有大于D的宽度和小于(N-1)·d的高度的水平槽;以及驱动机构,其被配置成响应于机械输入,使所述门相对于其中该槽门是其一部分的所述多晶片盒的所述晶片支撑结构竖直平移。每个门可具有大于(2·N-1)·d的高度;以及每个门可被设置在其中该门是其一部分的所述多晶片盒的所述前开口的前面。
在该装置的一些实现方式中,该装置可进一步包括被配置为接收所述一个或多个多晶片盒中的至少一个并沿水平轴在水平位置之间平移所述一个或多个多晶片盒中所接收的至少一个。在这样的实现方式中,所述晶片处理室可被定位在所述水平晶片盒传送器的任一侧上的间隔开的位置,以及所述一个或多个机械手臂中的第一机械手臂可被配置为当所述第一多晶片盒被至少设置在所述水平位置的第一水平位置时,在所述一个或多个多晶片盒的第一多晶片盒与所述晶片处理室中的第一晶片处理室、所述晶片处理室中的第二晶片处理室、所述晶片处理室中的第三晶片处理室、和所述晶片处理室中的第四晶片处理室之间输送半导体晶片。所述第一晶片处理室和所述第二晶片处理室可位于所述水平晶片盒传送器的第一侧面上,所述第三晶片处理室和所述第四晶片处理室可位于所述水平晶片盒传送器的第二侧面上,以及所述水平晶片盒传送器的所述第一侧面可以在所述水平晶片盒传送器的与所述水平晶片盒传送器的所述第二侧面的相对的侧面上。
在该装置中的一些这样的实现方式中,该装置还可以包括一个或多个竖直晶片盒传送器。每个竖直晶片盒传送器可与所述水平位置中的不同的一个相关联;以及所述一个或多个竖直晶片盒传送器中的第一竖直晶片盒传送器可与所述第一水平位置相关联。每个竖直晶片盒传送器可包括一个或多个机械接口;并且每个竖直晶片盒传送器的每个机械接口可被配置为,当该机械接口与该多晶片盒竖直对准并且该多晶片盒被定位在与该竖直晶片盒传送器相关联的水平位置上并且由在基线竖直位置上的所述水平晶片盒传送器支撑时,与所述一个或多个多晶片盒中的多晶片盒对接。每个竖直晶片盒传送器可被配置为使包含在该竖直晶片盒传送器中的一个或多个机械接口以及与这些一个或多个机械接口对接的每个多晶片盒沿竖直轴平移至一个或多个竖直盒位置,所述竖直盒位置与所述基准竖直位置位于不相同的高度。在这样的实现方式中,所述第一机械手臂可被配置为当所述第一多晶片盒定位在所述第一水平位置上并且还通过所述第一竖直晶片盒传送器定位在所述一个或多个竖直盒位置中的第一竖直盒位置时,在所述第一多晶片盒与所述第一晶片处理室、所述第二晶片处理室、所述第三晶片处理室和所述第四晶片处理室之间输送半导体晶片。
在一些进一步这样的实现方式中,每个机械接口可包括至少一个缓冲气体端口,以及每个多晶片盒可包括至少一个缓冲气体入口。当该多晶片盒与该机械接口对接时,每个多晶片盒中的所述至少一个缓冲气体入口可与每个机械接口的至少一个缓冲气体端口对准,由此允许缓冲气体经由该至少一个缓冲气体端口和至少一个缓冲气体入口被引入到多晶片盒的内部体积。
在该装置的一些实现方式中,所述一个或多个竖直晶片盒传送器中的第二竖直晶片盒传送器可与所述水平位置的第二水平位置相关联;所述第一机械手臂可置于所述第一水平位置和所述第二水平位置之间,每个多晶片盒还可包括后开口,该后开口的尺寸设为允许半导体晶片被插入到该多晶片盒或从该多晶片盒中取出,并且所述后开口与该多晶片盒的所述前开口相对;对于每个多晶片盒,可作为所述一个或多个多晶片盒中的每个的一部分的所述至少一个槽-门机构可包括第二槽-门机构;每个第二槽-门机构的门可被定位在所述第二槽-门结构作为其一部分的所述多晶片盒的后开口的前面,所述第二槽-门机构是所述一个或多个多晶片盒中的一个的一部分,所述第二多晶片盒是所述一个或多个多晶片盒中的一个,以及所述第一机械手臂还可被配置为,当所述第二多晶片盒被定位在所述第二水平位置上并通过所述第二竖直晶片盒传送器定位在所述第一竖直盒位置上时,在第二多晶片盒与所述第一晶片处理室、所述第二晶片处理室、所述第三晶片处理室和所述第四晶片处理室之间传送半导体晶片。
在该装置的一些实现方式中,该装置还可以包括一个或多个竖直机械手臂传送器,并且所述晶片处理室中的第五晶片处理室,所述晶片处理室中的第六晶片处理室,所述晶片处理室中的第七晶片处理室,和所述晶片处理室中的第八晶片处理室。所述第五晶片处理室、所述第六晶片处理室、所述第七晶片处理室和所述第八晶片处理室可位于所述第一晶片处理室、所述第二晶片处理室、所述第三晶片处理室和所述第四晶片处理室上方,并且所述一个或多个竖直机械手臂传送器中的每一个可置于相邻的竖直晶片盒传送器之间。每个竖直机械手臂传送器可被配置成沿竖直轴平移所述一个或多个机械手臂中的相应的一个至一个或多个竖直机械手臂位置。所述一个或多个竖直机械手臂位置中的第一竖直机械手臂位置可与所述第一竖直盒位置相关联。所述一个或多个竖直机械手臂位置中的第二竖直机械手臂位置可与所述一个或多个竖直盒位置中的与所述第一竖直盒位置不同的第二竖直盒位置相关联。所述第一机械手臂可被配置为,当所述第一多晶片盒定位在所述第一水平位置上和所述第一竖直盒位置上并且所述第一机械手臂被定位在所述第一竖直机械手臂位置上时,在所述第一多晶片盒与所述第一晶片处理室、所述第二晶片处理室、所述第三晶片处理室和所述第四晶片处理室之间传送半导体晶片,并且所述第一机械手臂可被进一步配置为,在所述第一多晶片盒被定位在所述第一水平位置上和所述第二竖直盒位置上并且所述第一机械手臂被定位在所述第二竖直机械手臂位置上时,在所述第一多晶片盒与所述第五晶片处理室、所述第六晶片处理室、所述第七晶片处理室和所述第八晶片处理室之间传送半导体晶片。
在一些进一步这样的实现方式中,该装置可包括所述晶片处理室中的第九晶片处理室;所述晶片处理室中的第十晶片处理室;所述晶片处理室中的第十一晶片处理室;所述晶片处理室中的第十二晶片处理室;所述晶片处理室中的第十三晶片处理室;所述晶片处理室中的第十四晶片处理室;所述晶片处理室中的第十五晶片处理室;以及所述晶片处理室中的第十六晶片处理室。所述第九晶片处理室、所述第十晶片处理室、所述第十三晶片处理室和所述第十四晶片处理室可位于所述水平晶片盒传送器的第一侧面上,并且所述第十一晶片处理室、所述第十二晶片处理室、所述第十五晶片处理室和所述第十六晶片处理室可位于所述水平晶片盒传送器的第二侧面上。此外,所述第十三晶片处理室、所述第十四晶片处理室、所述第十五晶片处理室和所述第十六晶片处理室可位于所述第九晶片处理室、所述第十晶片处理室、所述第十一晶片处理室和所述第十二晶片处理室上方,并且所述第二水平位置可置于所述一个或多个机械手臂中的所述第一机械手臂和第二机械手臂之间。所述第二机械手臂可被配置为,当所述第二多晶片盒定位在所述第二水平位置上和所述第一竖直盒位置上并且所述第二机械手臂被定位在所述第一竖直机械手臂位置上时,在所述第二多晶片盒与所述第九晶片处理室、所述第十晶片处理室、所述第十一晶片处理室和所述第十二晶片处理室之间传送半导体晶片,并且所述第二机械手臂可被进一步配置为,在所述第二多晶片盒被定位在所述第二水平位置上和所述第二竖直盒位置上并且所述第二机械手臂被定位在所述第二竖直机械手臂位置上时,在所述第二多晶片盒与所述第十三晶片处理室、所述第十四晶片处理室、所述第十五晶片处理室和所述第十六晶片处理室之间传送半导体晶片。
在该装置的另外一些这样的实现方式中,所述至少一个缓冲气体微气候系统可包括配置成使缓冲气体流动跨越由所述一个或多个端部执行器支撑的所述半导体晶片的面对表面的一个或多个缓冲气体分配器。所述一个或多个缓冲气体分配器中的每一个可与所述一个或多个端部执行器中的不同的一个相关联,每个缓冲气体分配器可被配置成在所相关联的端部执行器是其一部分的所述机械手臂的至少一些运动期间随着所相关联的所述端部执行器一起运动,每个缓冲气体分配器和相关联的端部执行器可间隔开,使得当所述N个半导体晶片由所述N个晶片支撑结构支撑时,该缓冲气体分配器和相关联的端部执行器能插入由所述N个晶片支撑结构支撑的N个半导体晶片的堆叠中,以及每个缓冲气体分配器和相关联的端部执行器的每个的尺寸可设为配合在所述N个半导体晶片的堆叠中的晶片间的间隙内。
在该装置的一些实现方式中,该装置还可以包括水平晶片盒传送器,其被配置成接收所述一个或多个多晶片盒中的至少一个并沿水平轴在水平位置之间平移所述一个或多个多晶片盒中所接收的至少一个。在这样的实现方式中,所述晶片处理室可被定位在所述水平晶片盒传送器的任一侧上的间隔开的位置上,并且所述一个或多个机械手臂中的第一机械手臂被配置为,当所述第一多晶片盒被至少定位在所述水平位置中的第一水平位置上时,在所述一个或多个多晶片盒中的第一多晶片盒与所述晶片处理室中的第一晶片处理室、所述晶片处理室中的第二晶片处理室、所述晶片处理室中的第三晶片处理室,和所述晶片处理室中的第四晶片处理室之间传送半导体晶片。在这样的实现方式中,所述第一机械手臂可与所述一个或多个缓冲气体分配器中的第一缓冲气体分配器相关联,所述第一晶片处理室和所述第二晶片处理室可位于所述水平晶片盒传送器的第一侧面上,所述第三晶片处理室和所述第四晶片处理室可位于所述水平晶片盒传送器的第二侧面上,以及所述水平晶片盒传送器的所述第一侧面是在所述水平晶片盒传送器的与所述水平晶片盒传送器的所述第二侧面相对的侧面。
在该装置的一些这样的实现方式中,该装置还可以包括一个或多个竖直晶片盒传送器。每个竖直晶片盒传送器可与所述水平位置中的不同的一个相关联,并且所述一个或多个竖直晶片盒传送器中的第一竖直晶片盒传送器可与所述第一水平位置相关联。每个竖直晶片盒传送器可包括一个或多个机械接口,每个竖直晶片盒传送器的每个机械接口可被配置为,当该机械接口与该多晶片盒竖直对准并且该多晶片盒被定位在与该竖直晶片盒传送器相关联的所述水平位置上并且由在基线竖直位置上的所述水平晶片盒传送器支撑时,与所述一个或多个多晶片盒中的多晶片盒对接。每个竖直晶片盒传送器可被配置为,将包含在该竖直晶片盒传送器中的所述一个或多个机械接口,以及与这些一个或多个机械接口对接的每个多晶片盒,沿竖直轴平移到一个或多个竖直盒位置上;所述竖直盒位置可位于与所述基准竖直位置不相同的高度;以及所述第一机械手臂可被配置为,在所述第一多晶片盒被定位在所述第一水平位置上并且还通过所述第一竖直晶片盒传送器定位在所述一个或多个竖直盒位置中的第一竖直盒位置上时,在所述第一多晶片盒与所述第一晶片处理室、所述第二晶片处理室、所述第三晶片处理室和所述第四晶片处理室之间传送半导体晶片。
在一些额外的这样的实现方式中,每个机械接口可包括至少一个缓冲气体端口,每个多晶片盒可包括至少一个缓冲气体入口,以及当该多晶片盒与该机械接口对接时,每个多晶片盒的所述至少一个缓冲气体入口可与每个机械接口的所述至少一个缓冲器气体端口对准,由此允许缓冲气体经由至少一个缓冲气体端口和至少一个缓冲气体入口被引入到该多晶片盒的内部体积。
在该装置的一些实现方式中,所述一个或多个竖直晶片盒传送器中的第二竖直晶片盒传送器可与所述水平位置的第二水平位置相关联;所述第一机械手臂可置于所述第一水平位置和所述第二水平位置之间;每个多晶片盒还可包括后开口,该后开口的尺寸还设为允许半导体晶片能被插入到该多晶片盒或从该多晶片盒中取出,并且所述后开口与该多晶片盒的所述前开口相对;所述第二多晶片盒是所述一个或多个多晶片盒中的一个;并且所述第一机械手臂还可被配置为,当所述第二多晶片盒被定位在所述第二水平位置上并通过所述第二竖直晶片盒传送器定位在所述第一竖直带盒位置上时,在第二多晶片盒与所述第一晶片处理室、所述第二晶片处理室、所述第三晶片处理室和所述第四晶片处理室之间传送半导体晶片。
在一些这样的实现方式中,所述装置还可以包括一个或多个竖直机械手臂传送器;所述晶片处理室中的第五晶片处理室;所述晶片处理室中的第六晶片处理室;所述晶片处理室中的第七晶片处理室和所述晶片处理室中的第八晶片处理室。所述第五晶片处理室、所述第六晶片处理室、所述第七晶片处理室和所述第八晶片处理室可位于所述第一晶片处理室、所述第二晶片处理室、所述第三晶片处理室和所述第四晶片处理室上方,所述一个或多个竖直机械手臂传送器中的每一个可置于相邻的竖直晶片盒传送器之间。每个竖直机械手臂传送器可被配置成将所述一个或多个机械手臂中的相应的一个沿所述竖直轴平移至一个或多个竖直机械手臂位置上。所述一个或多个竖直机械手臂位置中的第一竖直机械手臂位置可与所述第一竖直盒位置相关联,所述一个或多个竖直机械手臂位置中的第二竖直机械手臂位置可与所述一个或多个竖直盒位置中的与所述第一竖直盒位置不同的第二竖直盒位置相关联。所述第一机械手臂可被配置为,在所述第一多晶片盒定位在所述第一水平位置上和所述第一竖直盒位置上并且所述第一机械手臂被定位在所述第一竖直机械手臂位置上时,在所述第一多晶片盒与所述第一晶片处理室、所述第二晶片处理室、所述第三晶片处理室和所述第四晶片处理室之间传送半导体晶片,并且所述第一机械手臂可被进一步配置为,当所述第一多晶片盒被定位在所述第一水平位置上和所述第二竖直盒位置上并且所述第一机械手臂被定位在所述第二竖直机械手臂位置上时,在所述第一多晶片盒与所述第五晶片处理室、所述第六晶片处理室、所述第七晶片处理室和所述第八晶片处理室之间传送半导体晶片。
在一些这样的实现方式方式中,该装置可进一步包括所述晶片处理室中的第九晶片处理室;所述晶片处理室中的第十晶片处理室;所述晶片处理室中的第十一晶片处理室;所述晶片处理室中的第十二晶片处理室;所述晶片处理室中的第十三晶片处理室;所述晶片处理室中的第十四晶片处理室;所述晶片处理室中的第十五晶片处理室;和所述晶片处理室中的第十六晶片处理室。所述第九晶片处理室、所述第十晶片处理室、所述第十三晶片处理室和所述第十四晶片处理室可位于所述水平晶片盒传送器的第一侧面上,所述第十一晶片处理室、所述第十二晶片处理室、所述第十五晶片处理室和所述第十六晶片处理室可位于所述水平晶片盒传送器的第二侧面上。此外,所述第十三晶片处理室、所述第十四晶片处理室、所述第十五晶片处理室和所述第十六晶片处理室可位于所述第九晶片处理室、所述第十晶片处理室、所述第十一晶片处理室和所述第十二晶片处理室上方。所述第二水平位置可置于所述一个或多个机械手臂中的所述第一机械手臂与第二机械手臂之间。所述第二机械手臂可被配置为,当所述第二多晶片盒被定位在所述第二水平位置和所述第一竖直盒位置上并且所述第二机械手臂被定位在所述第一竖直机械手臂位置上时,在所述第二多晶片盒与所述第九晶片处理室、所述第十晶片处理室、所述第十一晶片处理室和所述第十二晶片处理室之间传送半导体晶片,以及所述第二机械手臂被进一步配置为,当所述第二多晶片盒被定位在所述第二水平位置和所述第二竖直盒位置上并且所述第二机械手臂被定位在所述第二竖直机械手臂位置上时,在所述第二多晶片盒与所述第十三晶片处理室、所述第十四晶片处理室、所述第十五晶片处理室和所述第十六晶片处理室之间传送半导体晶片。
在一些这样的实现方式中,所述至少一个缓冲气体微气候系统还可包括作为所述一个或多个多晶片盒中的每一个的一部分的所述至少一个槽-门机构。在这样的实现方式中,每个多晶片盒可具有前开口,所述前开口的尺寸设为允许晶片被插入到所述多晶片盒或从所述多晶片盒取出;并且每个槽门机构可包括:门,其具有大于D的宽度和小于(N-1)·d的高度的水平槽;以及驱动机构,其被配置成:响应于机械输入,使所述门相对于其中该槽门是其一部分的所述多晶片盒的所述晶片支撑结构竖直平移。每个门可具有大于(2·N-1)·d的高度;以及每个门可被设置在其中该门是其一部分的所述多晶片盒的所述前开口的前面。
在一些实现方式中,可提供用于半导体处理工具的设备前端模块(EFEM)。所述EFEM可包括:一个或多个壁,其至少部分地限定所述EFEM的内部体积;晶片搬运机械手,其被配置成在所述EFEM的内部体积内移动晶片;缓冲气体端口,其被配置成输送通过所述缓冲气体端口供给的缓冲气体到所述EFEM的所述内部体积;缓冲气体控制阀,所述缓冲气体控制阀被配置成调节所述缓冲气体通过所述缓冲气体端口的流;以及控制器,所述控制器包括与存储器和与缓冲气体控制阀能通信地连接的一个或多个处理器。所述存储器可包括用于使控制器进行下列操作的计算机可执行指令:判定何时晶片通过所述机械手在所述内部体积内移动,至少部分地响应于晶片通过所述机械手在所述EFEM的所述内部体积内移动的判定,使所述缓冲气体控制阀转变到第一流动状态,从而造成所述缓冲气体流入所述EFEM的所述内部体积中,判定何时晶片不通过机械手在所述EFEM的所述内部体积内移动,以及至少部分地响应于晶片不通过所述机械手在所述EFEM的所述内部体积内移动的判定,使所述缓冲气体控制阀转变到第二流动状态,其中,所述缓冲气体的流动速率比在所述第一流动状态中的流动速率低。
在一些这样的实现方式中,所述EFEM还可包括配置成调节通过所述EFEM的内部体积的设施空气的流动的设施空气控制阀。所述设施空气控制阀可与所述控制器的所述一个或多个处理器通信地连接,以及所述存储器还可包括用于使控制器进行下列操作的计算机可执行指令:至少部分地响应于晶片不通过所述机械手臂在所述EFEM的所述内部体积内移动的判定,使所述设施空气控制阀转变到第三流动状态,从而造成所述设施气体流入所述EFEM的所述内部体积中,以及至少部分地响应于晶片通过所述机械手臂在所述EFEM的所述内部体积内移动的判定,使所述设施空气控制阀转变到第四流动状态,其中,所述设施空气的流动速率比在所述第三流动状态中的流动速率低。
在EFEM的一些实现方式中,所述EFEM可进一步包括:一个或多个装载接口,其配置为与一个或多个前开式统一标准匣(FOUP)对接,使得晶片能从所述一个或多个FOUP中的一个被转移到所述EFEM的内部体积或从所述EFEM的内部体积转移到一个或多个FOUP中的一个。所述EFEM还可包括一个或多个装载锁接口,其被配置成与一个或多个装载锁对接,通过所述一个或多个装载锁晶片能从所述EFEM的所述内部体积转移到所述半导体处理工具的处理区域或从所述半导体处理工具的处理区域被转移到所述EFEM的内部体积。
在EFEM的一些实现方式中,所述机械手可包括被配置为同时支撑多个半导体晶片的多晶片端部执行器。
在一些实现方式中,可提供一种用于半导体处理工具的设备前端模块(EFEM),所述EFEM可包括:一个或多个壁,其至少部分地限定所述EFEM的内部体积;一个或多个间隔壁,其将所述EFEM的内部体积划分成第一内部子体积和第二内部子体积;缓冲气体端口,其被配置成输送通过所述缓冲气体端口供给的缓冲气体至所述第二内部子体积;第一晶片搬运机械手,其被配置为在所述第一内部子体积内移动晶片;第二晶片搬运机械手,其被配置为在所述第二内部子体积内移动晶片;第一气体处理器,其被配置为使设施空气流动通过所述第一内部子体积;以及第二气体处理器,其被配置成使所述缓冲气体流动通过所述第二内部子体积。
在一些实现方式中,可以提供一种用于半导体处理工具的晶片搬运机械手。所述晶片搬运机械手可包括:机械手;端部执行器,其被配置成支撑半导体晶片;以及缓冲气体分配器,其被配置成当所述半导体晶片由所述端部执行器支撑时使缓冲气体流动跨越所述半导体晶片的上表面。所述端部执行器可位于所述机械手臂的端部,并且所述缓冲气体分配器可通过所述机械手臂直接或间接地被支撑,以及所述缓冲气体分配器被配置成对于所述机械手臂的至少一些运动随着所述端部执行器一起运动。
在所述晶片搬运机械手的一些实现方式中,所述缓冲气体分配器可以包括气体分配板和支撑臂。所述气体分配板可具有朝向所述端部执行器并从所述端部执行器偏离的第一表面。所述第一表面可包括被配置为引导所述缓冲气体朝向所述端部执行器的一个或多个缓冲气体分配端口,以及所述支撑臂可支撑所述气体分配板并且可由所述机械手臂支撑。
在所述晶片搬运机械手的一些实现方式中,所述气体分配板可具有基本圆形的形状并可具有大于配置所述端部执行器来支撑的所述半导体晶片的直径±10%的外直径。
在所述晶片搬运机械手的一些实现方式中,所述晶片搬运机械手还可以旋转枢轴,所述旋转枢轴联接所述支撑臂与所述机械手臂,以及所述旋转枢轴可被配置成使所述气体分配板从第一位置旋转到第二位置,在所述第一位置上,当所述端部执行器支撑所述半导体晶片时,所述气体分配板在所述半导体晶片上方居中,在所述第二位置上,当所述端部执行器支撑半导体晶片时,所述气体分配板在所述半导体晶片上方不居中。
在一些其他的或额外的这样的实现方式中,晶片搬运机械手还可以包括平移机构,所述平移机构联接所述支撑臂与所述机械手臂,以及所述平移机构可被配置成使所述气体分配板从第一位置平移到第二位置,在所述第一位置上,当所述端部执行器支撑所述半导体晶片时,所述气体分配板在所述半导体晶片上方居中,在所述第二位置上,当所述端部执行器支撑半导体晶片时,所述气体分配板在所述半导体晶片上方不居中。
在所述晶片搬运机械手的一些实现方式中,所述气体分配板在所述气体分配板的一个或多个侧面上可以包括一个或多个侧面缓冲气体分配端口,以及所述侧面缓冲气体分配端口可以被配置成使所述缓冲气体以与由所述端部执行器限定的晶片支撑平面平行的±30°内的一个或多个方向流动。
在一些实现方式中,可以提供一种用于与在半导体制造中使用的前开式统一标准匣(FOUP)对接的装置。所述FOUP可包括能移除的FOUP门和以竖直堆叠布置的多个晶片支撑结构,每个晶片支撑结构被配置成支撑直径为D的半导体晶片。所述装置可包括:平台,其被配置成接收FOUP;门,所述门包括具有大于D的宽度和小于所述晶片支撑结构的所述竖直堆叠的总高度的高度的水平槽;前开式接口机构(FIM),其中,所述FIM被配置成在所述FOUP被定位在平台上之后,从所述FOUP移除所述能移除的FOUP门;以及驱动单元,其被配置成沿竖直轴线移动所述门。
在一些这样的实现方式中,所述水平槽的所述高度可小于所述晶片支撑结构的所述竖直堆叠的总高度的50%。
在一些实现方式中,所述FOUP可具有在邻近的晶片支撑结构之间的平均间隔距离,并且所述水平槽的高度可小于所述平均间隔距离的300%。
在一些实现方式中,该装置可以进一步包括配置成当所述FOUP被定位在所述平台上时使缓冲气体流入所述FOUP的缓冲气体供给端口。
在一些实现方式中,可以提供一种用于与在半导体制造中使用的前开式统一标准匣(FOUP)对接的装置。所述FOUP可包括能移除的FOUP门和以竖直堆叠布置的多个晶片支撑结构,每个晶片支撑结构被配置成支撑直径为D的半导体晶片。所述装置可包括:平台,其被配置成接收FOUP;竖直驱动机构,其被配置成沿着竖直轴线移动所述平台;壁,所述壁包括具有大于D的宽度和小于所述晶片支撑结构的所述竖直堆叠的总高度的高度的水平槽;以及前开式接口机构(FIM),其中,所述FIM被配置成在所述FOUP被定位在平台上之后并且在所述平台被竖直定位以便对准所述FOUP与所述FIM之后,从所述FOUP移除所述能移除的FOUP门。
在一些实现方式中,所述水平槽的所述高度可小于所述晶片支撑结构的所述竖直堆叠的总高度的50%。
在一些实现方式中,所述FOUP可具有在邻近的晶片支撑结构之间的平均间隔距离,并且所述水平槽的所述高度可小于所述平均间隔距离的300%。
在一些实现方式中,该装置可以进一步包括配置成当所述FOUP被定位在所述平台上时使缓冲气体流入所述FOUP的缓冲气体供给端口。
具体而言,本发明的一些方面可以阐述如下:
1.一种装置,其包括:
机械手臂;
端部执行器,其连接到所述机械手臂并配置成在所述机械手臂的运动期间支撑半导体晶片;以及
缓冲气体分配器,其配置成当所述半导体晶片由所述端部执行器支撑时使缓冲气体流动跨越所述半导体晶片的面对表面,其中:
所述缓冲气体分配器被配置成在所述机械手臂的至少一些运动期间随着所述端部执行器一起运动,
所述缓冲气体分配器和端部执行器沿竖直轴间隔开,使得所述端部执行器和所述缓冲气体分配器能插入沿垂直于所述半导体晶片的轴线排列的半导体晶片的堆中,以及
所述缓冲气体分配器和所述端部执行器各自的尺寸设定成配合在所述半导体晶片的堆中的晶片间的间隙内。
2.根据条款1所述的装置,其中,所述缓冲气体分配器相对于所述端部执行器以间隔开的方式固定,并且在所述机械手臂的所有运动期间随着所述端部执行器一起运动。
3.根据条款1所述的装置,其中,所述半导体晶片的阵列具有由选自下列设备组成的组中的设备的一个或多个部件的晶片支撑特征所限定的晶片间阵列的间距:前开式统一标准匣、晶片收容器、晶片缓冲器、装载锁、多晶片盒和并排多晶片盒。
4.根据条款3所述的装置,其中,当所述半导体晶片由所述端部执行器和设备中的所述一个或多个部件的晶片支撑特征两者支撑时并且当所述缓冲气体分配器沿垂直于所述半导体晶片的第一方向观察时,所述缓冲气体分配器的与所述半导体晶片重叠的部分具有当沿所述第一方向观察时与设备的所述一个或多个部件中的晶片支撑特征不重叠的形状。
5.根据条款1所述的装置,其中:
每个晶片支撑特征具有面朝所述端部执行器的间隙;以及
所述缓冲气体分配器在垂直于所述缓冲气体分配器的长轴的方向上的宽度比所述间隙小。
6.根据条款1所述的装置,其中:
当所述半导体晶片由所述端部执行器支撑时,所述缓冲气体分配器在与所述半导体晶片重叠的区域在沿垂直于所述半导体晶片的方向上的厚度不超过9毫米;以及
所述缓冲气体分配器包括:
底表面,其面朝所述端部执行器,
顶表面,其朝向与所述缓冲气体分配器的所述底表面相对的方向,
一个或多个侧表面,其跨越在所述缓冲气体分配器的顶表面和所述缓冲气体分配器的底表面之间,
一个或多个第一气体分配端口,其布置在所述缓冲气体分配器的所述底表面上,
多个第二气体分配端口,其布置在所述缓冲气体分配器的所述侧表面上,以及
气体分配通道,其被配置成供给缓冲气体至所述一个或多个第一气体分配端口和所述多个第二气体分配端口。
7.根据条款1所述的装置,其中,当所述半导体晶片由所述端部执行器支撑并且所述缓冲气体分配器沿垂直于所述半导体晶片的第一方向观察时,所述缓冲气体分配器不延伸跨越半导体晶片的全部。
8.根据条款7所述的装置,其中,当所述半导体晶片由所述端部执行器支撑时并且所述缓冲气体分配器沿垂直于所述半导体晶片的第一方向观察时,所述缓冲气体分配器:
在穿过将所述端部执行器接合至所述机械手臂的机械接口与所述半导体晶片的中心轴线的第二方向上延伸跨越所述半导体晶片的直径的至少90%,以及
在垂直于所述第一方向和所述第二方向的第三方向上仅部分地延伸跨越所述半导体晶片。
9.根据条款1所述的装置,其中,当所述半导体晶片由所述端部执行器支撑时并且当沿平行于所述半导体晶片的轴线观察时,所述缓冲气体分配器的至少最外一半与所述半导体晶片不重叠。
10.根据条款1所述的装置,其中,当所述半导体晶片由所述端部执行器支撑时,所述缓冲气体分配器的在所述半导体晶片上方延伸的部分在沿平行于所述半导体晶片的轴线观察时与所述半导体晶片不重叠。
11.一种用于处理半导体晶片的装置,所述装置包括:
外壳;
接口,其被配置成支撑具有沿竖直轴以阵列排布的N个晶片支撑结构的多晶片存储系统,其中将所述晶片支撑结构设定尺寸为支撑直径为D的半导体晶片,N是大于1的整数,并且每个半导体晶片支撑结构与所述阵列中的任何相邻的晶片支撑结构或多个晶片支撑结构以平均距离d间隔开;以及
壁,其中:
所述壁包括具有宽度大于D和高度小于(N-1)·d的水平槽,
所述壁具有大于(2·N-1)·d的高度,
所述装置被配置成沿所述竖直轴提供所述水平槽和所述接口之间的相对平移,
所述壁被定位成以便靠近所述多晶片存储系统的开口,当所述多晶片存储系统由所述接口支撑时,所述半导体晶片通过该开口能装载入所述多晶片存储系统或从所述多晶片存储系统卸载,以及
当所述多晶片存储系统被所述接口支撑时,能让所述半导体晶片通过以被装载到所述多晶片存储系统中或从所述多晶片存储系统中卸载的所述壁提供所述多晶片存储系统的内部体积与所述外壳的内部体积之间的流限制屏障。
12.根据条款11所述的装置,其进一步包括:
第一缓冲气体端口,其被配置成输送第一缓冲气体到所述外壳中;以及
第二缓冲气体端口,其被配置成当所述多晶片存储系统由所述接口支撑时输送第二缓冲气体到所述多晶片存储系统中。
13.根据条款11所述的装置,其进一步包括:
机械手臂;
端部执行器,其连接到所述机械手臂并配置成在所述机械手臂的运动期间支撑半导体晶片;以及
缓冲气体分配器,其被配置成当所述半导体晶片由所述端部执行器支撑时使第一缓冲气体流动跨越所述半导体晶片的面对表面,其中:
所述缓冲气体分配器被配置成在所述机械手臂的至少一些运动期间随着所述端部执行器一起运动,
所述缓冲气体分配器和所述端部执行器间隔开,使得当所述多晶片存储系统被安装在所述装置中并存储有所述半导体晶片时,所述端部执行器和所述缓冲气体分配器能通过水平槽插入并到由所述晶片支撑结构的阵列所支撑的半导体晶片的阵列中,以及
所述缓冲气体分配器与所述端部执行器中的每个被设定尺寸为配合在所述半导体晶片的阵列中的晶片间的间隙内。
14.根据条款13所述的装置,其进一步包括:
第一缓冲气体端口,其被配置成输送第二缓冲气体到所述外壳中;以及
第二缓冲气体端口,其被配置成当所述多晶片存储系统由所述接口支撑时输送第三缓冲气体到所述多晶片存储系统中。
15.根据条款14所述的装置,其中,所述第一缓冲气体、所述第二缓冲气体和所述第三缓冲气体全部通过设施氮气源的方式提供。
16.根据条款13所述的装置,其中,所述缓冲气体分配器相对于所述端部执行器以间隔开的方式固定并在所述机械手臂的所有运动期间随着所述端部执行器一起移动。
17.根据条款11所述的装置,其还包括所述多晶片存储系统,其中所述多晶片存储系统由所述接口支撑。
18.根据条款11所述的装置,其中,所述多晶片存储系统选自:前开式统一标准匣、晶片存储器、晶片缓冲器、多晶片盒和装载锁。
19.根据条款11所述的装置,其还包括驱动机构,其中所述驱动机构被配置成使所述壁相对于所述外壳沿所述竖直轴平移。
20.根据条款11所述的装置,其还包括驱动机构,其中所述驱动机构被配置成使所述接口相对于所述外壳沿所述竖直轴平移。
21.根据条款11所述的装置,其进一步包括:
机械手臂;以及
端部执行器,其连接到所述机械手臂并被配置成在所述机械手臂的运动期间支撑半导体晶片,其中:
所述水平槽有具有沿所述竖直轴的第一尺寸的中间部分,所述第一尺寸大于沿所述水平槽的位于所述中间部分的相对侧上的侧翼部分的竖直轴的对应的第二尺寸,
所述中间部分比所述端部执行器的配置成在所述机械手臂的运动期间支撑所述半导体晶片的部分的宽度更宽,
所述端部执行器具有配置成当所述半导体晶片由所述端部执行器支撑时接触半导体晶片的晶片接触表面,
当所述半导体晶片由所述端部执行器支撑并且所述端部执行器在沿垂直于所述半导体晶片的方向上被观察时,所述端部执行器具有背朝所述晶片接触表面并位于所述半导体晶片的外周内的一个或多个第一底表面,以及
所述第一尺寸大于或等于所述第二尺寸加上所述端部执行器的所述一个或多个第一底表面中的最底表面与所述晶片接触表面之间的竖直距离。
22.根据条款21所述的装置,其中:
所述端部执行器具有背朝所述一个或多个第一底表面并且当所述端部执行器用于将半导体晶片放置到所述多晶片存储系统中时穿过所述水平槽的一个或多个第一上表面,以及
所述第一尺寸大于或等于所述端部执行器的所述一个或多个第一底表面中的所述最底表面与所述端部执行器的所述一个或多个第一上表面中的最上表面之间的竖直距离。
23.根据条款21所述的装置,其进一步包括:
缓冲气体分配器,其被配置成当所述半导体晶片由所述端部执行器支撑时使缓冲气体流动跨越所述半导体晶片的面对表面,其中:
所述缓冲气体分配器被配置成在所述机械手臂的至少一些运动期间随着所述端部执行器一起移动,
所述缓冲气体分配器和端部执行器间隔开,使得当所述多晶片存储系统安装在所述装置中并存储有所述半导体晶片时,所述端部执行器和所述缓冲气体分配器能插入由所述晶片支撑结构的阵列所支撑的所述半导体晶片的阵列中,
所述缓冲气体分配器与所述端部执行器中的每个被设定尺寸为配合到所述半导体晶片的阵列中的晶片间的间隙内,
所述缓冲气体分配器具有背朝所述一个或多个第一底面并且当所述端部执行器用于将半导体晶片从所述多晶片存储系统移除时穿过所述水平槽的一个或多个第一上表面,以及
所述第一尺寸大于或等于所述端部执行器的所述一个或多个第一底表面中的所述最底表面与所述缓冲气体分配器的所述一个或多个第一上表面中的最上表面之间的竖直距离。
24.一种装置,其包括:
多个晶片处理室,其定位在不同的位置;
底盘,其支撑在所述不同的位置上的所述晶片处理室;
一个或多个多晶片盒,每个多晶片盒具有沿竖直轴布置的N个晶片支撑结构,其中所述晶片支撑结构的尺寸设置为支撑直径为D的半导体晶片,N为大于1的整数,并且每个半导体晶片支撑结构与所述阵列中的任何相邻的晶片支撑结构或多个晶片支撑结构以平均距离d间隔开;
一个或多个机械手臂,每个臂具有配置成在该机械手臂的运动期间支撑半导体晶片的端部执行器,其中所述一个或多个机械手臂被配置成传送半导体晶片来往于所述一个或多个多晶片盒并到所述多个晶片处理室;以及
至少一种缓冲气体微气候系统,其选自:a)至少一个槽-门机构,其是所述一个或多个多晶片盒中的每个的一部分,b)一个或多个缓冲气体分配器,其配置成使缓冲气体流动跨越由所述一个或多个端部执行器支撑的半导体晶片的面对表面,以及c)a)和b)两者。
25.根据条款24的所述的装置,其中,所述至少一个缓冲气体微气候系统包括作为所述一个或多个多晶片盒中的每个的一部分的至少一个槽-门机构,其中:
每个多晶片盒具有前开口,所述前开口的尺寸设置为允许晶片被插入到所述多晶片盒或从所述多晶片盒取出;
每个槽-门机构包括:
门,其具有大于D的宽度和小于(N-1)·d的高度的水平槽;以及
驱动机构,其被配置成响应于机械输入,使所述门相对于所述多晶片盒的所述晶片支撑结构竖直平移,所述槽-门是所述多晶片盒的一部分;
每个门具有大于(2·N-1)·d的高度;以及
每个门被设置在所述多晶片盒的所述前开口的前面,所述门是所述多晶片盒的一部分。
26.根据条款24所述的装置,其中所述至少一个缓冲气体微气候系统包括被配置成使缓冲气体流动跨越由所述一个或多个端部执行器支撑的半导体晶片的面对表面的所述一个或多个缓冲气体分配器,其中:
所述一个或多个缓冲气体分配器中的每个与所述一个或多个端部执行器中的不同的一个相关联,
每个缓冲气体分配器被配置成在其中所相关联的所述端部执行器是其一部分的所述机械手臂的至少一些运动期间随着所相关联的所述端部执行器一起运动,
每个缓冲气体分配器和相关联的端部执行器间隔开,使得当所述N个半导体晶片由所述N个晶片支撑结构支撑时,所述缓冲气体分配器和所相关联的所述端部执行器能插入由所述N个晶片支撑结构支撑的所述N个半导体晶片的堆中,以及
每个缓冲气体分配器和相关联的端部执行器各自的尺寸设成配合在所述N个半导体晶片的堆内的晶片间的间隙内。
27.根据条款26所述的装置,其中,所述至少一个缓冲气体微气候系统还包括作为所述一个或多个多晶片盒中的每个的一部分的所述至少一个槽-门机构,其中:
每个多晶片盒具有前开口,所述前开口的尺寸设置为允许晶片被插入到所述多晶片盒中或从所述多晶片盒取出;
每个槽-门机构包括:
门,其具有大于D的宽度和小于(N-1)·d的高度的水平槽;以及
驱动机构,其被配置成响应于机械输入,使所述门相对于所述多晶片盒的所述晶片支撑结构竖直平移,其中该槽-门是所述多晶片盒的一部分;
每个门具有大于(2·N-1)·d的高度;以及
每个门被设置在所述多晶片盒的所述前开口的前面,其中该门是所述多晶片盒的一部分。
28.根据条款25所述的装置,其还包括水平晶片盒传送器,其被配置为接收所述一个或多个多晶片盒中的至少一个并沿水平轴在水平位置之间平移所述一个或多个多晶片盒中所接收的至少一个,其中:
所述晶片处理室被定位在所述水平晶片盒传送器的任一侧上的间隔开的位置,以及
所述一个或多个机械手臂中的第一机械手臂被配置为当所述第一多晶片盒被至少设置在所述水平位置的第一水平位置时,在所述一个或多个多晶片盒中的第一多晶片盒与所述晶片处理室中的第一晶片处理室、所述晶片处理室中的第二晶片处理室、所述晶片处理室中的第三晶片处理室、以及所述晶片处理室中的第四晶片处理室之间输送半导体晶片,
所述第一晶片处理室和所述第二晶片处理室位于所述水平晶片盒传送器的第一侧面上,
所述第三晶片处理室和所述第四晶片处理室位于所述水平晶片盒传送器的第二侧面上,以及
所述水平晶片盒传送器的所述第一侧面在所述水平晶片盒传送器的与所述水平晶片盒传送器的所述第二侧面相对的侧面上。
29.根据条款28所述的装置,其还包括一个或多个竖直晶片盒传送器,其中:
每个竖直晶片盒传送器与所述水平位置中的不同的一个相关联;
所述一个或多个竖直晶片盒传送器中的第一竖直晶片盒传送器与所述第一水平位置相关联;
每个竖直晶片盒传送器包括一个或多个机械接口;
每个竖直晶片盒传送器的每个机械接口被配置为,当该机械接口与该多晶片盒竖直对准并且该多晶片盒被定位在与该竖直晶片盒传送器相关联的水平位置上并且由在基线竖直位置上的所述水平晶片盒传送器支撑时,与所述一个或多个多晶片盒中的多晶片盒对接;
每个竖直晶片盒传送器被配置为使包含在该竖直晶片盒传送器中的一个或多个机械接口以及与这些一个或多个机械接口对接的每个多晶片盒沿竖直轴平移至一个或多个竖直盒位置;
所述竖直盒位置与所述基准竖直位置位于不相同的高度;以及
所述第一机械手臂被配置为当所述第一多晶片盒定位在所述第一水平位置上并且还通过所述第一竖直晶片盒传送器定位在所述一个或多个竖直盒位置中的第一竖直盒位置时,在所述第一多晶片盒与所述第一晶片处理室、所述第二晶片处理室、所述第三晶片处理室以及所述第四晶片处理室之间输送半导体晶片。
30.根据条款29所述的装置,其中:
每个机械接口包括至少一个缓冲气体端口,
每个多晶片盒包括至少一个缓冲气体入口,以及
当该多晶片盒与该机械接口对接时,每个多晶片盒中的所述至少一个缓冲气体入口与每个机械接口的至少一个缓冲气体端口对准,由此允许缓冲气体经由该至少一个缓冲气体端口和至少一个缓冲气体入口被引入到多晶片盒的内部体积。
31.根据条款29所述的装置,其中:
所述一个或多个竖直晶片盒传送器中的第二竖直晶片盒传送器与所述水平位置的第二水平位置相关联;
所述第一机械手臂置于所述第一水平位置和所述第二水平位置之间;
每个多晶片盒还包括后开口,该后开口的尺寸也被设置为允许半导体晶片被插入到该多晶片盒或从该多晶片盒中取出,并且所述后开口与该多晶片盒的所述前开口相对;
对于每个多晶片盒,作为所述一个或多个多晶片盒中的每个的一部分的所述至少一个槽-门机构包括第二槽-门机构;
每个第二槽-门机构的门被定位在所述多晶片盒的后开口的前面,其中所述第二槽-门机构是所述一个或多个多晶片盒的一部分;
所述第一机械手臂还配置为,当所述第二多晶片盒被定位在所述第二水平位置上并通过所述第二竖直晶片盒传送器定位在所述第一竖直盒位置上时,在第二多晶片盒与所述第一晶片处理室、所述第二晶片处理室、所述第三晶片处理室和所述第四晶片处理室之间传送半导体晶片;以及
所述第二多晶片盒是所述一个或多个多晶片盒中的一个。
32.根据条款31所述的装置,其进一步包括:
一个或多个竖直机械手臂传送器;
所述晶片处理室中的第五晶片处理室;
所述晶片处理室中的第六晶片处理室;
所述晶片处理室中的第七晶片处理室;以及
所述晶片处理室中的第八晶片处理室,其中:
所述第五晶片处理室、所述第六晶片处理室、所述第七晶片处理室和所述第八晶片处理室位于所述第一晶片处理室、所述第二晶片处理室、所述第三晶片处理室和所述第四晶片处理室上方,
所述一个或多个竖直机械手臂传送器中的每一个置于相邻的竖直晶片盒传送器之间,
每个竖直机械手臂传送器被配置成沿竖直轴平移所述一个或多个机械手臂中的相应的一个至一个或多个竖直机械手臂位置,
所述一个或多个竖直机械手臂位置中的第一竖直机械手臂位置与所述第一竖直盒位置相关联,
所述一个或多个竖直机械手臂位置中的第二竖直机械手臂位置与所述一个或多个竖直盒位置中的与所述第一竖直盒位置不同的第二竖直盒位置相关联,
所述第一机械手臂被配置为当所述第一多晶片盒定位在所述第一水平位置上和所述第一竖直盒位置上并且所述第一机械手臂被定位在所述第一竖直机械手臂位置上时,在所述第一多晶片盒与所述第一晶片处理室、所述第二晶片处理室、所述第三晶片处理室和所述第四晶片处理室之间传送半导体晶片,以及
所述第一机械手臂被进一步配置为,在所述第一多晶片盒被定位在所述第一水平位置上和所述第二竖直盒位置上并且所述第一机械手臂被定位在所述第二竖直机械手臂位置上时,在所述第一多晶片盒与所述第五晶片处理室、所述第六晶片处理室、所述第七晶片处理室和所述第八晶片处理室之间传送半导体晶片。
33.根据条款32所述的装置,其进一步包括:
所述晶片处理室中的第九晶片处理室;
所述晶片处理室中的第十晶片处理室;
所述晶片处理室中的第十一晶片处理室;
所述晶片处理室中的第十二晶片处理室;
所述晶片处理室中的第十三晶片处理室;
所述晶片处理室中的第十四晶片处理室;
所述晶片处理室中的第十五晶片处理室;以及
所述晶片处理室中的第十六晶片处理室,其中:
所述第九晶片处理室、所述第十晶片处理室、所述第十三晶片处理室和所述第十四晶片处理室位于所述水平晶片盒传送器的第一侧面上,
所述第十一晶片处理室、所述第十二晶片处理室、所述第十五晶片处理室和所述第十六晶片处理室位于所述水平晶片盒传送器的第二侧面上,
所述第十三晶片处理室、所述第十四晶片处理室、所述第十五晶片处理室和所述第十六晶片处理室位于所述第九晶片处理室、所述第十晶片处理室、所述第十一晶片处理室和所述第十二晶片处理室上方,
所述第二水平位置置于所述一个或多个机械手臂中的所述第一机械手臂和第二机械手臂之间,
所述第二机械手臂被配置为当所述第二多晶片盒定位在所述第二水平位置上和所述第一竖直盒位置上并且所述第二机械手臂被定位在所述第一竖直机械手臂位置上时,在所述第二多晶片盒与所述第九晶片处理室、所述第十晶片处理室、所述第十一晶片处理室和所述第十二晶片处理室之间传送半导体晶片,以及
所述第二机械手臂被进一步配置为在所述第二多晶片盒被定位在所述第二水平位置上和所述第二竖直盒位置上并且所述第二机械手臂被定位在所述第二竖直机械手臂位置上时,在所述第二多晶片盒与所述第十三晶片处理室、所述第十四晶片处理室、所述第十五晶片处理室和所述第十六晶片处理室之间传送半导体晶片。
34.根据条款33所述的装置,其中,所述至少一个缓冲气体微气候系统包括配置成使缓冲气体流动跨越由所述一个或多个端部执行器支撑的所述半导体晶片的面对表面的一个或多个缓冲气体分配器,其中:
所述一个或多个缓冲气体分配器中的每一个与所述一个或多个端部执行器中的不同的一个相关联,
每个缓冲气体分配器被配置成在所相关联的端部执行器是其一部分的所述机械手臂的至少一些运动期间随着所相关联的所述端部执行器一起运动,
每个缓冲气体分配器和相关联的端部执行器间隔开,使得当所述N个半导体晶片由所述N个晶片支撑结构支撑时,该缓冲气体分配器和相关联的端部执行器能插入由所述N个晶片支撑结构支撑的N个半导体晶片的堆中,以及
每个缓冲气体分配器和相关联的端部执行器各自的尺寸被设置为配合在所述N个半导体晶片的堆中的晶片间的间隙内。
35.根据条款26所述的装置,进一步包括水平晶片盒传送器,其被配置成接收所述一个或多个多晶片盒中的至少一个并沿水平轴在水平位置之间平移所述一个或多个多晶片盒中所接收的至少一个,其中:
所述晶片处理室被定位在所述水平晶片盒传送器的任一侧上的间隔开的位置上,
所述一个或多个机械手臂中的第一机械手臂被配置为,当所述第一多晶片盒被至少定位在所述水平位置中的第一水平位置上时,在所述一个或多个多晶片盒中的第一多晶片盒与所述晶片处理室中的第一晶片处理室、所述晶片处理室中的第二晶片处理室、所述晶片处理室中的第三晶片处理室,和所述晶片处理室中的第四晶片处理室之间传送半导体晶片,
所述第一机械手臂与所述一个或多个缓冲气体分配器中的第一缓冲气体分配器相关联,
所述第一晶片处理室和所述第二晶片处理室位于所述水平晶片盒传送器的第一侧面上,
所述第三晶片处理室和所述第四晶片处理室位于所述水平晶片盒传送器的第二侧面上,以及
所述水平晶片盒传送器的所述第一侧面是在所述水平晶片盒传送器的与所述水平晶片盒传送器的所述第二侧面相对的侧面。
36.根据条款35所述的装置,还包括一个或多个竖直晶片盒传送器,其中:
每个竖直晶片盒传送器与所述水平位置中的不同的一个相关联;
所述一个或多个竖直晶片盒传送器中的第一竖直晶片盒传送器与所述第一水平位置相关联;
每个竖直晶片盒传送器包括一个或多个机械接口;
每个竖直晶片盒传送器的每个机械接口被配置为,当该机械接口与该多晶片盒竖直对准并且该多晶片盒被定位在与该竖直晶片盒传送器相关联的所述水平位置上并且由在基线竖直位置上的所述水平晶片盒传送器支撑时,与所述一个或多个多晶片盒中的多晶片盒对接;
每个竖直晶片盒传送器被配置为,将包含在该竖直晶片盒传送器中的所述一个或多个机械接口,以及与这些一个或多个机械接口对接的每个多晶片盒,沿竖直轴平移到一个或多个竖直盒位置上;
所述竖直盒位置位于与所述基准竖直位置不相同的高度;以及
所述第一机械手臂被配置为,在所述第一多晶片盒被定位在所述第一水平位置上并且还通过所述第一竖直晶片盒传送器定位在所述一个或多个竖直盒位置中的第一竖直盒位置上时,在所述第一多晶片盒与所述第一晶片处理室、所述第二晶片处理室、所述第三晶片处理室以及所述第四晶片处理室之间传送半导体晶片。
37.根据条款36所述的装置,其中:
每个机械接口包括至少一个缓冲气体端口,
每个多晶片盒包括至少一种缓冲气体入口,以及
当该多晶片盒与该机械接口对接时,每个多晶片盒的所述至少一个缓冲气体入口与每个机械接口的所述至少一个缓冲器气体端口对准,由此允许缓冲气体经由至少一个缓冲气体端口和至少一个缓冲气体入口被引入到该多晶片盒的内部体积。
38.根据条款36所述的装置,其中:
所述一个或多个竖直晶片盒传送器中的第二竖直晶片盒传送器与所述水平位置的第二水平位置相关联;
所述第一机械手臂置于所述第一水平位置和所述第二水平位置之间;
每个多晶片盒还包括后开口,该后开口的尺寸也被设置为允许半导体晶片能被插入到该多晶片盒或从该多晶片盒中取出,并且所述后开口与该多晶片盒的所述前开口相对;
所述第一机械手臂还被配置为,当所述第二多晶片盒被定位在所述第二水平位置并通过所述第二竖直晶片盒传送器定位在所述第一竖直带盒位置上时,在第二多晶片盒与所述第一晶片处理室、所述第二晶片处理室、所述第三晶片处理室和所述第四晶片处理室之间传送半导体晶片;以及
所述第二多晶片盒是所述一个或多个多晶片盒中的一个。
39.根据条款38所述的装置,进一步包括:
一个或多个竖直机械手臂传送器;
所述晶片处理室中的第五晶片处理室;
所述晶片处理室中的第六晶片处理室;
所述晶片处理室中的第七晶片处理室;以及
所述晶片处理室中的第八晶片处理室,其中:
所述第五晶片处理室、所述第六晶片处理室、所述第七晶片处理室和所述第八晶片处理室位于所述第一晶片处理室、所述第二晶片处理室、所述第三晶片处理室和所述第四晶片处理室上方,
所述一个或多个竖直机械手臂传送器中的每一个置于相邻的竖直晶片盒传送器之间,
每个竖直机械手臂传送器被配置成将所述一个或多个机械手臂中的相应的一个沿所述竖直轴平移至一个或多个竖直机械手臂位置上,
所述一个或多个竖直机械手臂位置中的第一竖直机械手臂位置与所述第一竖直盒位置相关联,
所述一个或多个竖直机械手臂位置中的第二竖直机械手臂位置与所述一个或多个竖直盒位置中的与所述第一竖直盒位置不同的第二竖直盒位置相关联,
所述第一机械手臂被配置为,在所述第一多晶片盒定位在所述第一水平位置上和所述第一竖直盒位置上并且所述第一机械手臂被定位在所述第一竖直机械手臂位置上时,在所述第一多晶片盒与所述第一晶片处理室、所述第二晶片处理室、所述第三晶片处理室和所述第四晶片处理室之间传送半导体晶片,以及
所述第一机械手臂被进一步配置为,当所述第一多晶片盒被定位在所述第一水平位置和所述第二竖直盒位置上并且所述第一机械手臂被定位在所述第二竖直机械手臂位置上时,在所述第一多晶片盒与所述第五晶片处理室、所述第六晶片处理室、所述第七晶片处理室和所述第八晶片处理室之间传送半导体晶片。
40.根据条款39所述的装置,进一步包括:
所述晶片处理室中的第九晶片处理室;
所述晶片处理室中的第十晶片处理室;
所述晶片处理室中的第十一晶片处理室;
所述晶片处理室中的第十二晶片处理室;
所述晶片处理室中的第十三晶片处理室;
所述晶片处理室中的第十四晶片处理室;
所述晶片处理室中的第十五晶片处理室;和
所述晶片处理室中的第十六晶片处理室,其中:
所述第九晶片处理室、所述第十晶片处理室、所述第十三晶片处理室和所述第十四晶片处理室位于所述水平晶片盒传送器的第一侧面上,
所述第十一晶片处理室、所述第十二晶片处理室、所述第十五晶片处理室和所述第十六晶片处理室位于所述水平晶片盒传送器的第二侧面上,
所述第十三晶片处理室、所述第十四晶片处理室、所述第十五晶片处理室和所述第十六晶片处理室位于所述第九晶片处理室、所述第十晶片处理室、所述第十一晶片处理室和所述第十二晶片处理室上方,
所述第二水平位置置于所述一个或多个机械手臂中的所述第一机械手臂与第二机械手臂之间,
所述第二机械手臂被配置为,当所述第二多晶片盒被定位在所述第二水平位置和所述第一竖直盒位置上并且所述第二机械手臂被定位在所述第一竖直机械手臂位置上时,在所述第二多晶片盒与所述第九晶片处理室、所述第十晶片处理室、所述第十一晶片处理室和所述第十二晶片处理室之间传送半导体晶片,以及
所述第二机械手臂被进一步配置为,当所述第二多晶片盒被定位在所述第二水平位置和所述第二竖直盒位置上并且所述第二机械手臂被定位在所述第二竖直机械手臂位置上时,在所述第二多晶片盒与所述第十三晶片处理室、所述第十四晶片处理室、所述第十五晶片处理室和所述第十六晶片处理室之间传送半导体晶片。
41.根据条款40所述的装置,其中所述至少一个缓冲气体微气候系统还包括作为所述一个或多个多晶片盒中的每一个的一部分的所述至少一个槽-门机构,其中:
每个多晶片盒具有前开口,所述前开口的尺寸被设置为允许晶片被插入到所述多晶片盒或从所述多晶片盒取出;
每个槽-门机构包括:
门,其具有大于D的宽度和小于(N-1)·d的高度的水平槽;以及
驱动机构,其被配置成响应于机械输入,使所述门相对于所述多晶片盒的所述晶片支撑结构竖直平移,该槽-门是所述多晶片盒的一部分;
每个门具有大于(2·N-1)·d的高度;以及
每个门被设置所述多晶片盒的所述前开口的前面,该门是所述多晶片盒的一部分。
42.一种用于半导体处理工具的设备前端模块(EFEM),所述EFEM包括:
一个或多个壁,其至少部分地限定所述EFEM的内部体积;
晶片搬运机械手,其被配置成在所述EFEM的内部体积内移动晶片;
缓冲气体端口,其被配置成输送通过所述缓冲气体端口供给的缓冲气体到所述EFEM的所述内部体积;
缓冲气体控制阀,所述缓冲气体控制阀被配置成调节所述缓冲气体通过所述缓冲气体端口的流;以及
控制器,所述控制器包括与存储器以及与缓冲气体控制阀能通信地连接的一个或多个处理器,其中,所述存储器包括用于使所述控制器进行下列操作的计算机可执行指令:
判定何时晶片通过所述机械手在所述内部体积内移动,
至少部分地响应于晶片通过所述机械手在所述EFEM的所述内部体积内移动的判定,使所述缓冲气体控制阀转变到第一流动状态,从而造成所述缓冲气体流入所述EFEM的所述内部体积中,
判定何时晶片不通过机械手在所述EFEM的所述内部体积内移动,以及
至少部分地响应于晶片不通过所述机械手在所述EFEM的所述内部体积内移动的判定,使所述缓冲气体控制阀转变到第二流动状态,其中,所述缓冲气体的流动速率比在所述第一流动状态中的流动速率低。
43.根据条款42所述的EFEM,所述EFEM还包括配置成调节通过所述EFEM的内部体积的设施空气的流动的设施空气控制阀:
所述设施空气控制阀能与所述控制器的所述一个或多个处理器通信地连接,以及
所述存储器还包括用于使控制器进行下列操作的计算机可执行指令:
至少部分地响应于晶片不通过所述机械手臂在所述EFEM的所述内部体积内移动的判定,使所述设施空气控制阀转变到第三流动状态,从而造成所述设施气体流入所述EFEM的所述内部体积中,以及
至少部分地响应于晶片通过所述机械手臂在所述EFEM的所述内部体积内移动的判定,使所述设施空气控制阀转变到第四流动状态,其中,所述设施空气的流动速率比在所述第三流动状态中的流动速率低。
44.根据条款42所述的EFEM,所述EFEM进一步包括:
一个或多个装载接口,其配置为与一个或多个前开式统一标准匣(FOUP)对接,使得晶片能从所述一个或多个FOUP中的一个被转移到所述EFEM的内部体积或从所述EFEM的内部体积转移到一个或多个FOUP中的一个;以及
一个或多个装载锁接口,其被配置成与一个或多个装载锁对接,晶片能通过所述一个或多个装载锁从所述EFEM的所述内部体积转移到所述半导体处理工具的处理区域或从所述半导体处理工具的处理区域被转移到所述EFEM的内部体积。
45.根据条款42所述的EFEM,其中,所述机械手包括被配置为同时支撑多个半导体晶片的多晶片端部执行器。
46.一种用于半导体处理工具的设备前端模块(EFEM),所述EFEM包括:
一个或多个壁,其至少部分地限定所述EFEM的内部体积;
一个或多个间隔壁,其将所述EFEM的内部体积划分成第一内部子体积和第二内部子体积;
缓冲气体端口,其被配置成输送通过所述缓冲气体端口供给的缓冲气体至所述第二内部子体积;
第一晶片搬运机械手,其被配置为在所述第一内部子体积内移动晶片;
第二晶片搬运机械手,其被配置为在所述第二内部子体积内移动晶片;
第一气体处理器,其被配置为使设施空气流动通过所述第一内部子体积;以及
第二气体处理器,其被配置成使所述缓冲气体流动通过所述第二内部子体积。
47.一种用于半导体处理工具的晶片搬运机械手,所述晶片搬运机械手包括:
机械手臂;
端部执行器,其被配置成支撑半导体晶片;以及
缓冲气体分配器,其被配置成当所述半导体晶片由所述端部执行器支撑时使缓冲气体流动跨越所述半导体晶片的上表面,其中:
所述端部执行器位于所述机械手臂的端部,
所述缓冲气体分配器通过所述机械手臂直接或间接地被支撑,以及
所述缓冲气体分配器被配置成对于所述机械手臂的至少一些运动随着所述端部执行器一起运动。
48根据条款47所述的晶片搬运机械手,其中,所述缓冲气体分配器包括:
气体分配板;以及
支撑臂,其中:
所述气体分配板具有朝向所述端部执行器并偏离所述端部执行器的第一表面,
所述第一表面包括被配置为引导所述缓冲气体朝向所述端部执行器的一个或多个缓冲气体分配端口,以及
所述支撑臂支撑所述气体分配板并且由所述机械手臂支撑。
49.根据条款48所述的晶片搬运机械手,其中,所述气体分配板具有基本圆形的形状并具有大于配置所述端部执行器来支撑的所述半导体晶片的直径±10%的外直径。
50.根据条款49所述的晶片搬运机械手,其还包括旋转枢轴,其中:
所述旋转枢轴联接所述支撑臂与所述机械手臂,以及
所述旋转枢轴被配置成使所述气体分配板从第一位置旋转到第二位置,在所述第一位置上,当所述端部执行器支撑所述半导体晶片时,所述气体分配板在所述半导体晶片上方居中,在所述第二位置上,当所述端部执行器支撑半导体晶片时,所述气体分配板在所述半导体晶片上方不居中。
51.根据条款49所述的晶片搬运机械手,还包括平移机构,其中:
所述平移机构联接所述支撑臂与所述机械手臂,以及
所述平移机构被配置成使所述气体分配板从第一位置平移到第二位置,在所述第一位置上,当所述端部执行器支撑所述半导体晶片时,所述气体分配板在所述半导体晶片上方居中,在所述第二位置上,当所述端部执行器支撑半导体晶片时,所述气体分配板在所述半导体晶片上方不居中。
52.根据条款48所述的晶片搬运机械手,其中:
所述气体分配板在所述气体分配板的一个或多个侧面上包括一个或多个侧面缓冲气体分配端口,以及
所述侧面缓冲气体分配端口被配置成使所述缓冲气体以与由所述端部执行器限定的晶片支撑平面平行的±30°内的一个或多个方向流动。
53.一种用于与在半导体制造中使用的前开式统一标准匣(FOUP)对接的装置,其中所述FOUP包括能移除的FOUP门和以竖直堆叠布置的多个晶片支撑结构,每个晶片支撑结构被配置成支撑直径为D的半导体晶片,所述装置包括:
平台,其被配置成接收FOUP;
门,所述门包括具有大于D的宽度和小于所述晶片支撑结构的所述竖直堆叠的总高度的高度的水平槽;
前开式接口机构(FIM),其中,所述FIM被配置成在所述FOUP被定位在平台上之后,从所述FOUP移除所述能移除的FOUP门;以及
驱动单元,其被配置成沿竖直轴线移动所述门。
54.根据条款53所述的装置,其中,所述水平槽的所述高度小于所述晶片支撑结构的所述竖直堆叠的总高度的50%。
55.根据条款53所述的装置,其中,所述FOUP具有在邻近的晶片支撑结构之间的平均间隔距离,并且所述水平槽的高度小于所述平均间隔距离的300%。
56.根据条款53所述的装置,其还包括配置成当所述FOUP被定位在所述平台上时使缓冲气体流入所述FOUP的缓冲气体供给端口。
57.一种用于与在半导体制造中使用的前开式统一标准匣(FOUP)对接的装置,其中所述FOUP包括能移除的FOUP门和以竖直堆叠形式布置的多个晶片支撑结构,每个晶片支撑结构被配置成支撑直径为D的半导体晶片,所述装置包括:
平台,其被配置成接收FOUP;
竖直驱动机构,其被配置成沿着竖直轴线移动所述平台;
壁,所述壁包括具有大于D的宽度和小于所述晶片支撑结构的所述竖直堆叠的总高度的高度的水平槽;以及
前开式接口机构(FIM),其中,所述FIM被配置成在所述FOUP被定位在平台上之后并且在所述平台被竖直定位以便对准所述FOUP与所述FIM之后,从所述FOUP移除所述能移除的FOUP门。
58.根据条款53所述的装置,其中,所述水平槽的所述高度小于所述晶片支撑结构的所述竖直堆叠的总高度的50%。
59.根据条款53所述的装置,其中,所述FOUP具有在邻近的晶片支撑结构之间的平均间隔距离,并且所述水平槽的所述高度小于所述平均间隔距离的300%。
60.根据条款53所述的装置,还包括配置成当所述FOUP被定位在所述平台上时使缓冲气体流入所述FOUP的缓冲气体供给端口。
附图说明
本文所公开的各种实现方式以举例的方式而不是通过限制的方式被示出,在附图的图中,其中最后两个数字相同的参考标号表示在不同的实现方式中的类似的元件(在某些实例中涉及5位数的参考标号,5位数的参考标号中的最后三个数字可以是相同的,而不是仅最后两个数字相同)。
图1描述了一示例性的EFEM,其中设施空气向下流动通过EFEM的内部体积(volume)。
图2和3描绘了图1的示例性EFEM的侧视图。
图4描绘了具有多晶片端部执行器的替代的示例性EFEM设计。
图5描绘了示例性分区的EFEM,其中EFEM具有设施空气EFEM分区和缓冲气体EFEM分区。
图6和7分别描绘了示例性的缓冲气体分配器的顶视图和侧视图。
图8至10描绘了在操作的不同阶段期间的示例性可旋转缓冲气体分配器的顶视图。
图11至13描绘了在操作的不同阶段期间的示例性可平移缓冲气体分配器的顶视图。
图14描绘了另一示例缓冲气体分配器的顶视图。
图15描绘了图14的示例性缓冲气体分配器的侧视图。
图16描绘了图14的插入多晶片存储系统的缓冲气体分配器的顶视图。
图17-19描绘了在晶片操作的不同阶段期间的两个示例性晶片支撑特征和晶片以及示例性端部执行器和示例性缓冲气体分配器的详细局部侧剖视图。
图20-22描绘了在晶片操作的不同阶段期间,图17的两个示例性晶片支撑特征和晶片以及图17的示例性端部执行器和不同的示例性缓冲气体分配器的详细局部侧剖视图。
图23描绘了示例性缓冲气体分配器的另一示例的俯视图。
图24描绘了图23的示例性缓冲气体分配器的侧视图。
图25描绘了示例性缓冲气体分配器的另一示例的俯视图。
图26至30分别描绘了示例性缓冲气体分配器的等距视图、剖面等距视图、详细剖面等距视图、侧视图、和详细侧视图。
图31至35描绘了在操作的不同阶段过程中具有带有水平槽的示例性门的示例性EFEM。
图36至40描绘了在操作的不同阶段过程中具有带有水平槽的示例性壁的示例性EFEM。
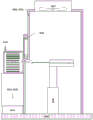
图41描绘了一示例性EFEM,其包括带有水平槽的门以及具有缓冲气体分配器的机械手臂。
图42描绘了不带槽门的示例性装载端口单元。
图43描绘了带槽门的示例性装载端口单元。
图44和45描绘了图43的带有在两个替代的“关闭”位置的槽门的示例性装载端口单元的等距剖视图。
图46至48描绘了图43的带有在不同位置的槽门的示例性装载端口单元的进一步的剖视图。
图49至52描绘了示例性缓冲单元和槽门的等距视图。
图53描绘了图49的示例性缓冲单元的侧剖视图。
图54描绘了示例性多站式清洁工具的侧视图。
图55描绘了示例性多晶片匣或盒的横截面图。
图56描绘了示例性多站式半导体处理工具的等距视图。
图57描绘了图56的示例性多站式半导体处理工具的另一等距视图。
图58描绘了图56的示例性多站式半导体处理工具的又一等距视图。
图59和60描绘了可以在图56的示例性多站式半导体处理工具中使用的示例性多晶片盒的顶部和底部等距视图。
图61和62描绘了图59的示例性多晶片盒的不同剖面图。
图63至68描绘了在图59的带有在不同位置的门的示例性多晶片盒的前视图。
图69描绘了带槽门的示例性双晶片对准器等距分解图。
图70到72描绘了图69的带有在不同位置上的槽门的示例性双晶片对准器的前视图。
图73描绘了带槽门的示例性双晶片装载锁的侧剖视图。
图74描绘了伯努利型(Bernoulli-type)端部执行器的一个示例。
在附图中所示的实现方式意在进行代表性的例证,并且不应被视为使本公开的构思仅受限于所描绘的结构。应该理解的是,与所描述的示例不同的其他实现方式也可能落入本公开和所附权利要求书的范围内。
具体实施方式
本文讨论了用于使用缓冲气体提供增强的晶片保护的多种技术、系统以及装置,该缓冲气体也可作为 “清扫”气体。缓冲气体相对于半导体晶片在很大程度上或完全是惰性的/非反应性的,并且当晶片被这种缓冲气体包围时可以预防或减轻对晶片的损坏。应当理解,对于下面讨论的每种实现方式,这样的缓冲气体可以是多种这类气体中的任何一种,并且可以通过这种气体的设施源(例如,设施氮气源)提供。
在典型的半导体处理设施中,可以通过高架运输系统(例如架空索道)将FOUP从半导体处理工具运输到半导体处理工具,例如,高架运输系统从上面拾取FOUP,将这些FOUP举起完全离开半导体处理工具,将它们移动到另一个半导体处理工具,然后使FOUP向下降低到该另一半导体处理工具。
每个半导体处理工具可以具有装载端口单元,装载端口单元可以具有用于接收FOUP的平台、接口、或台阶。装载端口单元可以与包括一个或多个晶片传输机械手的设备前端模块(EFEM)相邻;所述EFEM还可以包括充当与半导体处理工具的执行半导体处理操作的部分的接口的一个或更多个装载锁或其他邻近结构。 EFEM通常有大的内部空间,并配备气体处理器。该气体处理器通常被配置为将设施空气吸入并将其推送通过EFEM内部体积。这样的气体处理器通常可以提供几百立方英尺/分钟的空气流量或更高,例如1200立方英尺/分钟的空气流量。尽管设施空气典型地在其到达内部体积之前被过滤,例如,通过超低颗粒空气(ULPA)过滤器过滤,但该设施空气仍然会具有可能不利影响经处理后的晶片上的特征的湿气、氧和/或其他的污染物的水平。通过EFEM传送并暴露于设施空气的晶片会在这样的运输过程中被这样的污染物损坏。这在最近由于半导体特征尺寸的缩小才成为公认的问题;这种暴露造成的潜在损坏以前没有呈现出显著的风险,这是因为晶片的特征尺寸只是在最近才变得足够小,以致这样的损坏可能干扰形成在晶片上的电路的正常操作。晶片也可以在其他情况下暴露于设施空气,而不只是在EFEM的环境中暴露。
本发明的发明人中的一些或全部确定,这种潜在的污染/损坏可以在半导体晶片经过EFEM或其他结构时通过围绕半导体晶片产生缓冲气体的“微气候”而被阻止或减轻。用于创建和管理这类微气候的几种潜在的技术将在下面被讨论。
应该理解的是,下文所讨论的各种构思可以以孤立或以各种排列和组合的方式来实现。相比于仅以孤立的方式使用本文所讨论的构思中的单个构思,组合的方式可以为晶片提供更好的保护而避免污染。此外,本文所讨论的构思中的许多可以包括与包含在本文所讨论的其他构思中的特征类似的特征。在这种情况下,在不同的实施方式中的类似的结构在附图中会涉及使用相同的最后两位数字。除非另有说明,否则在一个实施方式的背景中这样的特征的讨论一般同样适用于在其他实施方式中的对应的特征,如通过在附图中编号的特征中使用相同的最后两位数字所表示的。
EFEM微气候
如前面所述,EFEM呈现出有关晶片污染的特别棘手的环境。用于减轻这一风险的策略将在下面讨论。
在图1中,示出了EFEM 111,其中设施空气向下流动通过EFEM 111的内部体积。具有用于接收FOUP 110的三个平台的装载端口单元113可以与EFEM 111相连。图2描绘了图1的EFEM 111的侧视图。可以看出,气体处理器112与缓冲气体供应源124连接,缓冲气体供应源124可以是设施气体源或累积器,该设施气体源或累积器可存储大量缓冲气体以使得缓冲气体流量能超出设施缓冲气体供应源的容量。缓冲气体供应源124可以被连接到缓冲气体分配器116或分配系统,该缓冲气体分配器116或分配系统可以被配置为分配在气体处理器112内(或另一个位置内)的缓冲气体,使得所述缓冲气体可流经EFEM111的晶片运输区。来自缓冲气体供应源124的缓冲气体流可通过缓冲气体控制阀114控制,缓冲气体控制阀114可以进而由控制器118控制。通过气体处理器112的设施空气流可以类似地通过也由控制器118控制的设施空气控制阀117进行控制。
在非晶片传送操作中,如在图2中,控制器118可以保持缓冲气体控制阀114关闭,而设施空气控制阀117打开,从而使得设施空气可以流动通过EFEM 111(这保持EFEM 111内的正压,并且防止颗粒和其他污染物进入EFEM 111,除非通过气体处理器112的过滤系统)。
当晶片在EFEM 111的内部体积内传送时,如在图3(其中最底部的晶片已经由机械手臂102的端部执行器193从FOUP 110内的晶片104的架107被抽出,以使得其能被传送到装载锁129,装载锁129导向传送室120和/或一个或多个晶片处理室174)中所示,控制器118可以控制缓冲气体控制阀114,使得缓冲气体能够流入气体处理器112并进入EFEM 111的内部体积内。同时,控制器118可以使设施空气控制阀117(例如,其可以是设施空气关断减振器或其他流量控制装置)关闭,以便限制流经EFEM 111内部体积的设施空气的量。因此,在EFEM 111的内部体积的气氛可以于在没有运输晶片通过内部体积时的时间期间的设施空气和正在运输晶片通过内部体积时的缓冲气体之间切换。应该理解的是,这样的气体流可以是数字化的,例如,缓冲气体流或设施空气流可以是完全接通的或完全关断的,或者一种或两种这样的流可以被管理,以便存在有所使用的中间流水平。例如,在缓冲气体输送期间,设施空气控制阀可被设置为使水平降低的设施空气流动,使得EFEM环境经历缓冲气体和设施空气的混合。因此,根据实现方式的不同,所使用的控制阀可以是截止阀或流量控制阀。在这样的系统的一些实现方式中,EFEM 111可以被配置成,例如通过配备从EFEM 111的底部输送气体到EFEM 111的上部的气体返回通道而使流动通过EFEM 111的气体再循环,其中这样的再循环气体可以被重新引入到EFEM 111的内部体积内。在一些这样的实现方式中,或在替代的或附加的实现方式中,EFEM 111可以不在设施空气和缓冲气体之间来回切换。例如,当FOUP内的晶片被最初输送到EFEM时, EFEM可在其内具有可以被抽空并用缓冲气体置换的设施空气。这种缓冲气体然后可在FOUP停靠的全部时间连续使用(其可以再循环并定期补充更换因漏隙和其他逃逸路径而丢失的缓冲气体,或者其可以简单地连续流动)。
在多种实现方式中,该气体处理器112或风机过滤器单元还可以包括冷凝器和加热器系统115,冷凝器和加热器系统115可被用于去除流动通过气体处理器112的气体中的湿气(经由使其冷凝出来);加热器也可以用于在冷凝过程降低气体的温度后,升高这样的气体的温度。
由于一些缓冲气体(如N2)是a)昂贵的和b)有安全风险的(例如,如果显著数量的氮被引入到半导体处理设施的周围环境,则氮可以产生窒息的风险- 例如如果以1200立方英尺/分钟流动通过用于半导体处理工具的未气密密封的数百个EFEM,窒息的风险可能会出现),将缓冲气体的流动削减到短的时间间隔可能是合乎期望的。在这种情况下,使用被配置为同时支撑和载运多个晶片的多晶片端部执行器(即,端部执行器)可能是合乎期望的。以这种方式,在缓冲气体正在流动时,多个晶片可以同时通过EFEM,如图4中所示,这对于由端部执行器运输的额外晶片不必使缓冲气体流动持续附加的时间间隔。例如,在图4中,机械手臂402配备有5-晶片端部执行器493,其能同时升降和运输5个半导体晶片104。在图4所示的其他系统以类似图1的相应系统的操作方式操作。
用于缓冲气体微气候产生的另一种潜在的技术是使用具有内部屏障或分隔壁的EFEM,该内部屏障或分隔壁将EFEM的内部体积分成两个子体积:第一内部子体积和第二内部子体积。第一内部子体积可以具有循环通过它的设施空气,而第二内部子体积可以具有循环通过它的缓冲气体。在这些类型的实现方式中,每个子体积可以具有其自己的晶片搬运机械手。图5描绘了这样的实现方式。在图5中,外壳501具有设施空气EFEM 511和缓冲气体EFEM 511'。每个EFEM 511和511'可以分别具有对应的机械手臂502和502',机械手臂502和502'可用于运输来自装载端口单元513上的FOUP 510的半导体晶片进出它们各自的EFEM511和511'。该设施空气EFEM 511可以配备有设施空气处理器521,而缓冲气体EFEM 511'可以配备有缓冲气体处理器512,缓冲气体处理器512可以任选地包括冷凝器/加热器单元515以调节缓冲气体环境。
晶片传送机械手的微气候
尽管上面的技术和系统有利于EFEM内的缓冲气体环境的生产和维护,但本发明的发明人中的部分或全部还设想了可被用于在半导体晶片通过EFEM的内部体积时在紧邻该半导体晶片的附近产生更局部化的缓冲气体微气候的替代或补充的技术。这样的技术可以在配备缓冲气体的EFEM的背景中使用,例如前面讨论的那些,或可在正常的设施空气EFEM单元中使用。
在这样的技术中,晶片搬运机械手可以配备有被配置为直接在晶片上分配缓冲气体的缓冲气体分配器。在一些这样的实现方式中,如在图6和7所示的实现方式中,缓冲气体分配器605可以是大致圆形的,并且总体上与晶片604的尺寸相同。缓冲气体分配器605可以偏离晶片604使得当晶片604被机械手臂602的端部执行器693支撑时在缓冲气体分配器605和晶片604的面对表面(即,面对缓冲气体分配器的表面)之间存在间隙;该间隙可以是几毫米的量级,例如一厘米或更小。当晶片604被端部执行器693支撑时,一个或多个缓冲气体分配端口634可以定位在所述缓冲气体分配器605的面向晶片604的第一表面内,例如,底表面631内;当缓冲气体流动通过缓冲气体分配器605并流出缓冲气体分配端口634时,缓冲气体可以流过整个晶片604并充当气态保护层。此外,缓冲气体分配器605也可以作为阻挠设施空气朝向晶片604流动的物理屏障。因此,当缓冲气体分配器605居中于晶片604上方并且缓冲气体流动通过它时,晶片604可通过缓冲气体分配器605本身以及从缓冲气体分配器605流出的缓冲气体两者保护而不受设施空气流的影响。如图7所示,缓冲气体可以通过缓冲气体供应源624被提供给缓冲气体分配器605,在这个示例中,缓冲气体供应源624是被连接到设施缓冲气体供应源(未示出)的管。应该理解的是,在缓冲气体分配器的其他实现方式中,如在此所讨论的实现方式中的一些中,缓冲气体可以通过位于缓冲气体分配器的主体内的通道或气室(plenum)供给到缓冲气体分配端口,而不是如在图7中所示的通过缓冲气体分配器的外部的单独的通道供给到缓冲气体分配端口。
在一些这样的实现方式中,如在图6至图10中所示的实现方式中,缓冲气体分配器可以被支撑在被连接到支撑臂旋转枢轴623的支撑臂622上,支撑臂旋转枢轴623使得缓冲气体分配器605能在平行于晶片604的平面上摆动远离晶片604。由于多个FOUP可以沿着它们包含的晶片的边缘支撑晶片,因而,大小总体上与晶片604相同的缓冲气体分配器605会干扰这样的晶片支撑。当机械手臂伸入FOUP内时,支撑臂旋转枢轴623可使得缓冲气体分配器能被枢转到一侧,从而使得缓冲气体分配器不干扰FOUP内的晶片支撑。缓冲气体分配器可以尽可能长久地保持在晶片上以便使晶片不受EFEM内的设施空气流的影响。因此,当晶片已经部分地离开EFEM时,例如,当它是在FOUP的前庭内时,该缓冲气体分配器可以被旋转远离晶片,该前庭可以是深10cm左右(参见图10)。
图8至10描述了在晶片输送到FOUP 610的不同阶段期间,缓冲气体分配器605、晶片604和机械手臂602的俯视图。FOUP 610被定位在EFEM(未示出)的外侧;机械手臂602位于EFEM的内部。FOUP前庭625可以将FOUP 610与EFEM壁的内表面分隔开。
在图8中,机械手臂602、缓冲气体分配器605、晶片604和端部执行器693可全部沿方向1一起移动,以使晶片604接近FOUP 610。在这种移动期间,所述缓冲气体分配器可以在整个晶片604上分配缓冲气体,从而至少部分地使晶片604不会暴露于EFEM内的周围环境。
在图9中,机械手臂602、晶片604和端部执行器693可继续沿方向1的运动,而缓冲气体分配器605所连接的支撑臂622可绕转动枢轴623转动,从而沿顺时针方向2摆动(在其他实施方式中,支撑臂可沿逆时针方向摆动),使得缓冲气体分配器可以穿过FOUP前庭625。
在图10中,支撑臂622继续沿顺时针方向3绕转动枢轴623摆动,同时端部执行器693、机械手臂602和晶片604继续沿方向4平移。如可以看到的,晶片604几乎完全在FOUP610内,并且机械手臂602、端部执行器693和晶片604可以继续延伸到FOUP 610内,同时支撑臂622和缓冲气体分配器605继续转动,直到晶片604完全在FOUP 610内。
图11描绘了另一个类似的实现方式,其中支撑臂1122可以使用平移机构1126(例如,线性驱动器、滚珠丝杠、或其他线性平移机构)与机械手臂1102连接,从而使得支撑臂1122能相对于机械手臂1102平移。在这样的实现方式中,因为端部执行器1193被插入FOUP1110内,因此缓冲气体分配器1105可以以相同的速度平移远离FOUP 1110,从而限制缓冲气体分配器延伸到FOUP内的范围。因此,在一些实现方式中,对于端部执行器的至少一些运动,缓冲气体分配器会相对于端部执行器固定,例如当端部执行器正在EFEM内移动晶片时,缓冲气体分配器相对于端部执行器可以是固定的,并且当缓冲气体分配器与端部执行器前后(in tandem)移动时,缓冲气体分配器没有与其他部件碰撞的风险。
图12和13描绘了机械手臂1102、端部执行器1193和缓冲气体分配器1105沿方向1朝向FOUP 1110延伸这样的实现方式。在图13中,端部执行器1193(视线受阻)、晶片1104 、平移机构1126和机械手臂1102继续沿方向1延伸到FOUP 1110内,同时支撑臂1122和缓冲气体分配器1105通过平移机构1126沿相反的方向(即方向2)平移。这使缓冲气体分配器1105在FOUP前庭1125内“等待”,而晶片1104被放置到FOUP 1110内。在晶片1104被从FOUP 1110撤回的情况下,缓冲气体分配器1105和支撑臂1122可以以相同的方式操作,并且然后在端部执行器1193、晶片1104 、平移机构1126和机械手臂1102沿方向2平移时沿方向1平移,以从FOUP 1110撤回晶片1104。
在图14和15显示了缓冲气体分配器的另一个潜在的实现方式。在本实现方式中,缓冲气体分配器1405形成没有沿通常横向于端部执行器的长轴的方向在晶片1404上一直延伸的桨形状物。在这种情况下,至少会存在晶片1404的弦状区域,该区域没有被缓冲气体分配器1405屏蔽。在一些附加的这样的实现方式中,诸如在所描述的实现方式中,缓冲气体分配器1405也可以不在平行于端部执行器的长轴的方向上完全地延伸横过晶片1404(为清楚起见,端部执行器的如本文使用的“长轴”是延伸通过由该端部执行器所支撑的晶片的中心并且还延伸通过将端部执行器连接到机械手臂的任何机械接口的轴)。例如,缓冲气体分配器1405可仅沿一定的方向延伸跨越晶片1404的直径的大部分,例如,90%或更多,使得缓冲气体分配器1405不与可沿该方向搁置的晶片支撑特征重叠。缓冲气体分配器1405可具有面向晶片的一个或多个开口或缓冲气体分配端口(第一气体分配端口)1434以及可使缓冲气体流动通过晶片的整个暴露区域的一个或多个侧缓冲气体分配端口(第二气体分配端口)1435。一个或多个第一气体分配端口1434可以位于缓冲气体分配器1405的面对端部执行器1493的底表面1431内,并且可以使缓冲气体向下流到晶片1404上;然后该缓冲气体可以径向向外流向晶片1404和/或缓冲气体分配器1405的外周。虽然在本示例中仅示出了一个第一气体分配端口1434,但是应当理解的是,如果需要的话,可以有多个这样的第一气体分配端口分布在底表面1431的一或多个区域。第二气体分配端口1435可位于该缓冲气体分配器的跨于缓冲气体分配器的上表面1432和下表面1431之间的侧表面内,并被配置成使缓冲气体沿大致水平方向,即,大致平行于晶片1404的主平面的方向朝外流动。这具有产生薄的缓冲气体层或缓冲气体帘的效果,从而可以有助于保护晶片1404的没有与缓冲气体分配器1405重叠的部分。在实现方式中,例如在图14的实现方式中,缓冲气体可以通过与缓冲气体分配器1405成为一体的一个或多个气体分配通道1436输送到第一气体分配端口1434和第二气体分配端口1435。例如,缓冲气体分配器可以由内部已加工有气体分配通道1436的铝板制成;然后较薄的铝盖板可被焊接或以其他方式粘接到经加工的该铝板以产生缓冲气体分配器1405。第二气体分配端口1435也可被加工到该铝板内,或者可以在该盖板被连接后钻入该铝板的侧面内。
无论怎样准确地制造缓冲气体分配器1405,该缓冲气体分配器1405都可被设计为足够薄到实际上能插入半导体晶片的多晶片架中的半导体晶片之间。相应地,在本文讨论的缓冲气体分配器和端部执行器可以沿竖直轴被隔开,使得端部执行器和缓冲气体分配器可插入沿竖直轴(例如,沿垂直于该晶片的方向)排列的间隔开的半导体晶片的堆叠内。因此,端部执行器和缓冲气体分配器各自可以单独地设定尺寸以配合于这样的堆叠的半导体晶片之间的晶片间的间隙内。例如,在半导体制造操作中使用的设备的不同部件可以支撑竖直的间隔开的堆或阵列形式的多个半导体晶片。在本申请中所讨论的FOUP是一种这样的多晶片存储系统的一个示例。在FOUP内,大量的晶片,例如25个晶片,可通过从FOUP的侧壁突出的有规则地分隔开的间隔的翼片、凸缘或其他晶片支撑特征支撑。这些晶片支撑特征以及因此它们所支撑的晶片可以沿竖直轴彼此间隔开,例如,以使得每个晶片与每个邻近晶片分隔开约10mm(减去晶片厚度,对于300mm直径的晶片,该厚度为约0.75mm)的晶片间的间隙。当然,这个间隔可以根据设备不同而变化 - 例如450mm的晶片可以间隔开15mm。因此,缓冲气体分配器1405在垂直于晶片1404的方向上且在与半导体晶片1404重叠的区域内可以具有小于9mm的厚度(使得端部执行器和缓冲气体分配器之间的运动游隙将导致这样的厚度例如减小到小于或许该晶片间间隙的距离的约三分之一的厚度,例如小于3mm),尽管所用的特定的厚度当然依赖于所讨论的工具的尺寸约束,并且上述实施例不应被视为在所有情况下将本公开限制为 3mm厚度或3mm以下的厚度。
多晶片存储系统(缓冲气体分配器1405可与其一起使用)的其他实例包括多晶片盒、缓冲器、储片器(stocker)、和装载锁。多晶片盒可在半导体处理工具内被用来以同时的方式将多个晶片在不同位置之间运输。缓冲器是多晶片存储系统,该系统可以在EFEM的内部或可从EFEM的内部访问;缓冲器可用于在处理期间或之后,在传送它们到FOUP前临时存储晶片。例如,半导体晶片可能需要在处理之后并且在被放入FOUP(其通常由塑料制成,因此,可能通过与热晶片接触而被损坏)之前冷却下来,这样的半导体晶片可暂时停放在缓冲区以在被传送到等待FOUP前冷却下来。储片器是充当半导体处理工具内的半导体晶片的大容器的系统。例如储片器能够同时存储数十或甚至数百个半导体晶片,甚至可能是可转动的,以便充当转盘。储片器可以用于存储由于连续的处理步骤中处理时间不匹配而积聚的半导体晶片。装载锁是使得晶片能在不同的大气环境之间运输的气锁。例如,装载锁可被用于将晶片从大气环境传送到接近真空或真空环境。大多数装载锁一次只能传输一个或两个晶片,但是其他的装载锁可具有用于同时传输多个晶片的构造。这些类型的多晶片存储系统中的每一种可以具有其自己的晶片间的间距,并且被配置成与这样的系统一起使用的缓冲气体分配器可以被设计成将具有小于在这种系统中的相邻晶片之间的晶片间的间距或间隙(减去晶片厚度)的厚度。例如,缓冲气体分配器可以具有约2 mm的厚度,例如,顶表面和底表面的厚度为0.5mm,另外的1 mm是在顶表面和底表面之间的材料的厚度。
由于缓冲气体分配器的减小的宽度X,因此缓冲气体分配器可以在任何高度被完全插入到FOUP内而不会干扰在FOUP内的晶片支撑结构(其各自具有至少面向端部执行器的并且大于X的间隙Y)。例如,如果FOUP(或其他多晶片存储系统)是空的,并且这样的缓冲气体分配器将被插入到该FOUP内到与用来进出FOUP放置或移除晶片的程度相同的程度,如在图16中所示,则端部执行器1493和缓冲气体分配器1405可在FOUP 1410内向上和向下移动而不与晶片支撑特征1409碰撞,即,在这样的位置并从垂直于晶片1404的方向观察时,缓冲气体分配器1405不与晶片支撑特征重叠。这样的实现方式可以使得缓冲气体分配器1405能进一步与晶片1404间隔开或更厚,因为在该端部执行器1493与晶片的相互作用过程中,缓冲气体分配器的顶表面1432可被移动通过直接位于晶片上面的晶片支撑特征1409的下侧。因此,在一些实现方式中,如在本实现方式中和稍后所讨论的其他实现方式中,缓冲气体分配器在端部执行器的所有运动期间相对于端部执行器可以是固定的。
图17至22说明这样的缓冲气体分配器的优点。图17至19描绘了两个晶片支撑特征1409的细节局部侧剖视图;每个晶片支撑特征1409支撑相应的晶片1404的边缘。端部执行器1493被示出具有升高的凸起,相比于端部执行器1493的与晶片1404重叠的整个部分将接触晶片的情形,该升高的凸起可以以减小的接触面积接触晶片1404的下侧;端部执行器的实际上与晶片1404接触的部分可以在本文中称为“接触表面”。在图17至19中的晶片1404是0.75mm厚,并且端部执行器1493、缓冲气体分配器1405 、以及晶片支撑特征1409的实际上支撑晶片1404的部分都是2mm厚。在本实施例中的晶片1404以10mm的中心到中心的距离间隔开,从而导致在晶片1404的顶部和晶片支撑特征1409的直接在这些晶片1404上方的最底部表面之间的7.25mm的间隙。在这些条件下,如果需要在端部执行器1493和缓冲气体分配器1405插入到晶片架期间保持晶片1404和缓冲气体分配器1405以及端部执行器1493之间可能的最大游隙,以及在移除晶片1404的过程中在晶片支撑特征1409和晶片1404以及缓冲气体分配器1405之间可能的最大游隙,端部执行器1493和缓冲气体分配器1405在端部执行器1493和缓冲气体分配器1405插入到晶片架期间将仅仅与晶片1404偏离1.125mm的距离。在端部执行器1493和缓冲气体分配器1405被完全插入到晶片架后,端部执行器1493和缓冲气体分配器1405可以升高,以使端部执行器1493接触晶片1404,如图18所示。在图19中,端部执行器1493、缓冲气体分配器1405和晶片1404已被进一步升高,使得存在介于晶片1404与以前支持它的晶片支撑特征1409的顶表面之间的1.125mm的间隙以及介于缓冲气体分配器1405与直接在被举起的晶片1404上方的晶片支撑特征1409的下侧之间的1.125mm的间隙。因此,在端部执行器插入晶片架/从晶片架去除的过程中,在静止部件和运动部件之间的竖直间隙在这一情况下都可以被最大化至1.125mm。
如在图20至22可以看出,通过减少缓冲气体分配器1405的宽度,使得当沿竖直轴观看时,它不与晶片支撑件1409重叠,并且使得端部执行器1493和缓冲气体分配器1405可在任何高度插入晶片架而不接触晶片支撑特征1409,在相同的情况下,各种部件之间的最大游隙可增大至1.625mm,从而使间隙空间增大44%。这是因为在缓冲气体分配器1405上方的竖直间隙不受正在被移除的晶片1404上方的晶片支撑特征1409的限制,而是由在正在被移除的晶片1404上方的晶片1404的限制。
如从上面的讨论中明显看出的,使用例如没有在由相关联的端部执行器输送的晶片的整个宽度上延伸的缓冲气体分配器使得缓冲气体分配器能被完全插入间隔开的晶片堆叠中。这使得缓冲气体能在晶片由与端部执行器连接的机械手输送的整个时间期间在晶片上方从缓冲气体分配器流动。这与例如一些系统相反,在这些系统中,缓冲气体分配器过大而不能插入到晶片架内,并且必须替代地相对于端部执行器移动,以便使端部执行器在没有伴随缓冲气体分配器的情况下被插入到晶片架内。在这样的系统中,晶片在其从晶片架撤回时可以暂时不被缓冲气体屏蔽,因此会更容易受到来自非缓冲气体气氛的污染和/或损坏。
在一些实现方式中,缓冲气体分配器完全不需要在晶片上方,而是可以代替地是例如从晶片的周边的位置引导晶片上方的薄的缓冲气体层到狭缝扇状喷嘴。这种方法可能是最容易实现的,虽然使用这种技术没有直接屏蔽晶片,相比而言,在本文前面讨论的缓冲气体分配器中,缓冲气体分配器本身针对从上方接近的空气流充当晶片的至少一部分的不能穿透的屏蔽件。在图23和24中示出了这种技术。例如,在图23和24中,机械手臂2302配备有被连接到缓冲气体供应源2324的狭缝扇状喷嘴2337。狭缝扇状喷嘴2337设置在平面的上方,在该平面内晶片2304通过机械手臂2302的端部执行2393支撑。该狭缝扇状喷嘴2337可引导扇形图案的缓冲气体流到整个晶片2304的表面上,从而在晶片2304上提供局部的缓冲气体层。但是,这样的布置可能不适合于有大量的空气流过晶片2304的环境,因为缓冲气体分配器/狭缝扇状喷嘴2337没有对晶片2304进行物理屏蔽。图25描绘了一类似的示例,不同之处在于替代使缓冲气体以扇形形状向外流动的单个狭缝扇状喷嘴2337,喷嘴结构2538可包括一个或多个喷嘴,该一个或多个喷嘴具有跨越晶片2504的外周的显著部分(例如,25%左右或以上)的一个或多个出口区域,从而提供对薄的缓冲气体层将在晶片2504的整个暴露的上表面分布的更大的确定性。
图26至30分别描绘了示例性缓冲气体分配器的等距视图、剖面等距视图、细节剖面等距视图、侧视图、和细节侧视图。如可以看到的,机械手臂2602包括带有缓冲气体分配器2605的端部执行器2693。晶片2604由端部执行器2693支撑。如在图28中可以看出的,缓冲气体分配器2605可具有缓冲气体通道2636,缓冲气体通道2636导向位于缓冲气体分配器2605的底表面内的第一气体分配端口2634,从而使得缓冲气体能从缓冲气体分配器2605的中心附近跨过晶片2604向外流动,如由径向排列的箭头所显示的。缓冲气体通道2636也可以提供缓冲气体至位于侧表面2633内的第二多个气体分配端口2635,从而可相对于所述端部执行器2693沿相对的横向方向引导缓冲气体,如在图28中的平行的箭头所显示的。该缓冲气体分配器2605可具有上表面2632和相对的底表面(未显示)。如在图30中可以看出的,缓冲气体分配器2605可被视为具有若干部分。例如,缓冲气体分配器2605可以被划分为缓冲气体分配器2605的在垂直于晶片的方向上观察时与晶片2604重叠的部分2639和该缓冲气体分配器的不与晶片2604重叠的其余部分。类似地,缓冲气体分配器2605可在缓冲气体分配器2605的最外面的半部(half)之间,即,该部分2639的最外的半部2640之间划分(“半部”是参照缓冲气体分配器2605的与晶片2604重叠的部分,而不是参照整个缓冲气体分配器2605)。
如根据上述实施例所显而易见的,缓冲气体分配器可以位于晶片上方,所述晶片通过与它们相关联的端部执行器输送。此外,在至少一些实现方式中,当沿平行于晶片平面且垂直于端部执行器的长轴的方向观察时,所述缓冲气体分配器的至少最外的半部不与晶片重叠,例如,不具有从缓冲气体分配器的下侧延伸以包围或部分地包围晶片2604的竖直壁。在一些进一步的这样的实现方式中,当沿平行于晶片平面的方向观察且沿垂直于端部执行器的长轴的方向观看时,在部分2639内在缓冲气体分配器2605和晶片2604之间完全没有重叠。
可在某些情况下用于围绕由机械手臂输送的晶片提供局部缓冲气体环境的缓冲气体分配系统的另一种类型是伯努利型端部执行器。伯努利型端部执行器是其中晶片不是由刀片型端部执行器或其他结构从下方支撑而是通过伯努利效应被悬挂在端部执行器下方的一种端部执行器。在这样的端部执行器中,如在图74所描绘的端部执行器中,端部执行器9593可以是与晶片9504具有大致相同的或更大的直径的盘。该盘可以具有在中间的气体端口9536;当端部执行器9593被紧邻晶片9504(并且晶片9504居中于端部执行器9593的盘部)保持,缓冲气体可以流动通过中心气体端口9536。缓冲气体然后将朝向晶片的边缘9504径向向外流动。这种径向气体流产生伯努利效应,即,晶片9504和端部执行器9593之间的低压区域,并且在晶片9504的下侧的大气压将导致晶片9504被推向端部执行器9593。与此同时,在晶片9504和端部执行器9593之间流动的缓冲气体的压力保持晶片9504不与端部执行器9593接触。端部执行器9593可具有径向停止件95103,径向停止件95103接触晶片9504的边缘以保持晶片9504居中于端部执行器9593的盘部,并防止晶片9504相对于端部执行器9593转动。流动以产生伯努利效应的缓冲气体除了提供了伯努利效应外,还可以提供以上所讨论的缓冲气体微气候。因此,在一些实现方式中,可以使用伯努利端部执行器来代替如上文所述的端部执行器的和缓冲气体分配器分开的实现方式。
在FOUP和其他多晶片存储系统内的微气候
除了使用例如上面讨论的缓冲气体装备的EFEM和缓冲气体分配器之类的系统和技术以减轻或防止在传送室或其他密封环境的保护之外发生的晶片传送操作期间的晶片污染外,晶片也可以通过将缓冲气体引入多晶片存储系统内而在多晶片存储系统的范围内被保护。例如,如前面所提到的FOUP通常填充有缓冲气体,以防止包含在其内的晶片不被污染或不被损坏。由于FOUP在运输过程中是密封的,因此它们可以被加载有填充的缓冲气体,当晶片在FOUP内被输送时,该缓冲气体密封在FOUP内。然而,一旦FOUP停靠在装载端口,可以使用前开式接口机构(FIM)或类似物移开用于密封该FOUP的主开口的门,以使得能对包含在FOUP内的晶片进行访问。一旦FOUP的门已被移开,可能已在内部的缓冲气体自由地扩散到周围环境中(并且在周围环境中的空气类似地自由扩散到FOUP内)。为了冲抵在FOUP的门已经打开后在FOUP内的缓冲气体环境的损失,附加的缓冲气体可以通过一个或多个FOUP缓冲气体端口流入FOUP内,FOUP缓冲气体端口例如可以是与装载端口或半导体处理工具的其他部分上的特征对接以得到缓冲气体并将其引导到FOUP内的端口。FOUP缓冲气体端口可以是与最初用于在FOUP被密封之后用缓冲气体“填充”FOUP的端口相同的端口。
典型的EFEM将配备有一个或多个装载端口单元,它们通常设计成与在EFEM壁内的大致矩形的开口对接。装载端口单元可以包括上面具有定位或换位特征的一个或多个平台或基座,这些特征与FOUP上的相应特征对接。这些特征保证了FOUP当被放置在平台上时定位在期望的位置。装载端口单元还可以包括可上下滑动的门;门大致平行于可移动的FOUP门,并且,当装载端口单元被安装在EFEM内时,该门可以相对于周围环境将EFEM的内部封闭。当FOUP被放置在平台上时, FOUP的可移动的FOUP门可面向装载端口单元的门。装载端口单元的门可以包括例如前开式接口机构(FIM),前开式接口机构(FIM)可被致动以与可移动的FOUP门接合并将其拉动远离FOUP,从而将FOUP开封。一旦由FIM将可移动的FOUP门拉动离开FOUP,装载端口单元的门可以携带可移动的FOUP门与其一起下降或以其他方式移动到一边。一旦可移动的FOUP门被移动并滑动到一边,在FOUP内整个晶片堆叠对于EFEM内的晶片处理机械手是可访问的。
本发明的发明人中的一些或全部确定,如果在可移动的FOUP门被移开之后缓冲气体流动通过FOUP,则这样的布置可能是有问题的。由于FOUP的大开口(用于携带300mm晶片的FOUP可具有至少300mm宽的开口,并且具体取决于250至300mm或更大的晶片的数量),可能必须要求相当大的缓冲气体流以保持FOUP内的正压(其通常希望防止来自EFEM的空气被吸入或扩散到FOUP内,在这里它可能污染在FOUP内的所有晶片)。这可能是昂贵的和/或出现安全风险,因为需要大量的缓冲气体保持这种流动。
本发明的发明人中的一些或全部确定,该装载端口单元的门可被修改,以减少保持在FOUP内的正压所需要的缓冲气体流的量。如在图31中可以看到的,描绘了也可以被视为外壳3101的EFEM 3111与设施空气处理器3121;所述EFEM 3111可搁置在地板3143上。应当理解,EFEM 3111也可以是配备有缓冲气体系统的EFEM,使得EFEM 3111的内部体积可以具有流过它的缓冲气体,例如,类似于图1至5的EFEM。EFEM 3111还可以通过装载锁与一个或多个晶片处理室和/或晶片传送室连接(未示出,对于可以如何类似地相对于EFEM 3111布置这样的结构的示例,参见图2)。EFEM 3111可以在其内部定位具有端部执行器3193的机械手臂3102,机械手臂3102可用于传送晶片3104通过EFEM。EFEM 3111也可以与装载端口单元3113连接,装载端口单元提供或充当用于支撑FOUP 3110的接口3127。FOUP 3110可以具有可用于将缓冲气体引入FOUP 3110的内部体积的缓冲气体供给端口或FOUP端口3195;FOUP密封件31111可以将FOUP 3110密封到EFEM3111以防止缓冲气体从FOUP 3110和3111EFEM之间的缝隙逸出(此密封件没有在其他视图描述,但仍然会存在)。应当理解,虽然在本实施例中的FOUP端口3195被示出位于FOUP 3110的顶部,但FOUP端口3195也可以被设置在其他位置,例如,在FOUP 3110的底部,使得它可以与作为界面3127的一部分的缓冲气体供给端口(未示出)对接。晶片3104可以由晶片支撑特征(或支撑晶片的特征)3109支撑,晶片支撑特征3109可以沿FOUP 3110的内表面布置以便将被支撑在其上面的晶片3104在竖直分隔开的半导体晶片架3107内间隔开。EFEM 3111或装载端口单元3113还可以包括可以通过驱动机构3158竖直移动的可移动的壁或门3178;驱动机构3158可以,例如,是可被用于上下竖直移动门3178的线性致动器或其他机械或机电系统。门3178可以具有下半部(其配备有前开式接口机构(FIM)3142,前开式接口机构(FIM)3142可用于从FOUP 3110移开可移动的FOUP门3141以使得晶片3104能从FOUP 3110去除或放入FOUP3110内的)和上半部。水平槽3146可以有效地将两个半部分离。在传统的装载端口单元中,门不包括水平槽3146,也不包括门3178的上半部。
如在图32中可以看出的,一旦FOUP 3110放置在装载口单元3113 /接口3127上时,FIM 3142可延伸出来并与可移动的FOUP 门3141连接,然后可以缩回,如图33所示。一旦可移动的FOUP门3141已从FOUP3110移开,门3178可以利用驱动机构3158而下降,使得水平槽3146与在FOUP3110内的晶片3104中的一个对准。然后EFEM 3111内的机械手臂3102可以伸入FOUP 3110内并撤出晶片3104,如在图34看到的那样。如果需要在不同位置的晶片,则装载端口单元的门可以移动以使水平槽与其他的晶片对准,如在图35看到的。流入FOUP的任何缓冲气体可以通过水平槽流出FOUP,水平槽具有比整个FOUP开口的横截面面积显著小的横截面面积,例如,或许为FOUP开口的横截面面积的1/25。也会有通过介于FOUP和具有水平槽的壁或门之间的间隙从FOUP逸出的缓冲气体;为了避免可能由部件之间的摩擦而引起的不合适的颗粒产生,在这个接口提供密封可能是不合乎期望的。然而,由水平槽和这些间隙提供的流动路径总体上可能仍然提供在FOUP的内部体积和外壳/ EFEM的内部体积之间的流动限制屏障。这会相应地减少在FOUP内保持期望的正压程度所需要的缓冲气体流的量,从而降低了成本且提高了安全性。
图36示出了上述设计的另外的变体。在图36中,没有用于装载端口单元3613的门,并且EFEM3611具有包括固定的水平槽3646的壁。所述EFEM 3611还可以通过装载锁与一个或多个晶片处理室和/或晶片传送室连接(未示出,对于可以如何类似地相对于EFEM 3611布置这样的结构的示例,参见图2)。在该实现方式中,装载端口单元3613包括竖直驱动机构3659,从而使得支撑FOUP 3610的平台或接口3627相对于EFEM 3611能上下移动。EFEM 3611可以包括FIM 3642,当FOUP 3610是在特定的竖直位置时,FIM 3642可以将可移动的FOUP门3641移开(参见图37和38)。装载端口单元3613然后可下降(或升高,具体取决于FIM 3642位于何处)以使在FOUP 3610内的晶片3604中的一个与水平槽3646对准(参见图39)。如果需要另一晶片3604,则FOUP 3610可以竖直定位成使该另一晶片与水平槽对准(见图40)。如在上述各节描述的具有带水平槽的壁或门的实现方式在本文中由于它们共同并入了如上述提到的水平槽特征而可以称为“水平槽构思”。应当理解,在这样的实现方式中使用的驱动机构可以提供用于在水平槽3146或3646和支撑多晶片存储系统的接口之间的相对竖直平移。
图41描绘了另一示例性EFEM的侧视图。在图41中,示出了与图31至35中所述的EFEM 3111类似的EFEM 4111(例如,图41中的与图31中的元件对应的元件用具有相同的最后两位数字的标注表示,并且关于图31的这些元件的讨论同样适于图41中的相应元件),图31至图35中的元件的讨论同样适用于在图41中所描绘的实现方式。然而,图41中的实现方式还包括能够插入到在晶片架内的晶片之间的晶片间间隙内的缓冲气体分配器4105,缓冲气体分配器4105可以是在本公开内容中讨论的能插入到晶片4104的架4107内的缓冲气体分配器中的任何缓冲气体分配器。因此,晶片4104在停靠的FOUP 4110内时可通过不断流动的缓冲气体环境(由FOUP气体端口4195提供)保护,并且由机械手臂4102和端部执行器4193输送通过EFEM 4111时也可以通过经由缓冲气体分配器4105提供的连续流动的缓冲气体层保护。在一些这样的实现方式中,EFEM 4111也可以配备有缓冲气体系统以使缓冲气体流动通过整个EFEM 4111,类似于图1至图5所描述的系统。
在这样的系统中,用于 EFEM 4111的缓冲气体系统能够将在EFEM 4111缓冲气体环境中的设施空气的浓度降低到非常低的水平,例如,在晶片4104通过的位置中降低到100份/百万份(ppm),但由于进入EFEM 4111内的各种泄漏路径,将EFEM的缓冲气体环境中的设施空气的浓度降低到比使用EFEM缓冲气体分配系统达到的浓度较低的水平,这可能是不可行的。然而,通过结合EFEM缓冲气体分配系统使用槽门4146和缓冲气体分配器4105中的一个或两个,晶片4104周围的局部环境可被清扫,使得紧邻晶片4104的附近的设施空气的浓度被进一步降低,例如,降低至10 ppm或1 ppm。在某些情况下,实现设施空气的这种低浓度单独使用图1至5中的EFEM级缓冲气体分配系统会是不可行的,无论是组合还是单个地独自使用图7至图30的缓冲气体分配器和图31至40的水平槽的构思也都是不可行的。然而,结合组合地或单个地利用图7至图30的缓冲气体分配器和图31至40的水平槽的构思,使用参照图1至5所讨论的EFEM级缓冲气体分配系统,会存在协同效应,从而使得这样的组合方式的实现方式相比于可能不存在这样的协同组合的实现方式,能够实现较低的设施空气ppm水平。这是因为总是会有一定量的可到达晶片的“不期望有的”气体,无论使用本文所讨论的方法或技术中的哪一种都如此。
在EFEM级缓冲气体分配系统的情况下,密封整个EFEM,由于其大小和这样做的成本高昂,因而通常是不可行的或不实际的。其结果是,通常会存在围绕EFEM的设施空气泄漏进入EFEM的内部体积的情况,甚至缓冲气体流动通过EFEM时也如此。这类设施空气可能会与缓冲气体混合,该设施空气漏进EFEM的泄漏速率会使得,在没有实现远远更加昂贵和不切实际的EFEM设计或不使用远远较高流率的缓冲气体的情况下,可能难以在EFEM内获得所期望的最大水平的设施空气浓度,该EFEM设计被更紧密地密封以进一步减少泄漏进EFEM内的设施空气的量,该远远较高流率的缓冲气体可能是非常昂贵的并且可能引入安全性问题,因为远远较大量的缓冲气体可能需要进行安全处置。
类似地,也会有围绕缓冲气体分配器和/或水平槽构思的周围空气或气体泄漏到紧邻由所述端部执行器/机械臂运输的晶片或保留在FOUP的晶片的区域内。尽管通过增大缓冲气体的流率可以减少在这样的实现方式中到达晶片上的周围空气或气体的量,但是增大缓冲气体的流量到实现所期望的周围空气或气体的浓度水平所必要的水平,这可能是不可行的或者不实际的。例如,这样做时,可能涉及太昂贵或太危险的缓冲气体流率。在一些情况下,缓冲气体的流率可能需要增大至可能造成晶片振动或运动的水平,这通常会是不希望有的。
然而,如果EFEM缓冲气体分配系统串联组合的或单个的图7至图30的缓冲气体分配器和图31至40的水平槽的构思使用,则EFEM缓冲气体分配系统可以减少在EFEM内的在周围环境中的设施空气的浓度到第一水平,该第一水平是足够低的,以致仍保留在EFEM体积内的和到达晶片上的设施空气存在的量足够低,使得通过图7至图30的缓冲气体分配器和图31至40的水平槽的构思组合地或单个地提供的进一步的稀释可以将晶片附近的设施空气浓度水平降低到可接受的水平。
如前面提到的,装载端口单元可以配备有内部具有水平槽的可移动盖板或门,该水平槽其尺寸被设置为使得一次能够通过盖板或门从FOUP提取一个晶片;盖板或门可以竖直移动,以使得能从FOUP内的不同槽位置提取晶片。盖板或门可能有效地关闭FOUP的开口部的大部分,因而限制清扫气体流出FOUP。在装载端口单元的背面上也可以存在外壳体积,即,置于盖板和FOUP之间的外壳体积,从而提供用氮气填充的封闭的保护体积。该体积也可覆盖装载端口门机构,无论装载端口门机构是否被关闭或打开都如此。此外,FOUP可以密封到装载端口单元的前表面,以防止氮气流出间隙。在实践中,清扫气体可以仅流动通过槽并且通过盖板和FOUP或外壳体积之间的间隙流出,此间隙可以例如是约一个或几个毫米。因此,相比于其中清扫气体可以从FOUP的整个开口部分(即比晶片的直径宽并且比FOUP内的晶片架高度高的开口)流出的实现方式,让清扫气体可以流动通过以离开FOUP的横截面面积在使用槽门时会大大减小。
当晶片传送没有发生时,在一些实现方式中,盖板还可以具有移动到将槽阻塞(向上或向下)的位置的能力,使得可以使用减小的氮气流并可提供附加的晶片保护。
图42显示了无槽门(它已被去除)的装载端口单元4213;如可以看到的,整个晶片架4207可同时通过开口访问,该开口的高度比晶片架的高度大并且其宽度比晶片直径大。如果当FOUP 4210搁置在装载端口单元4213的接口4227上时,氮或其他缓冲气体将流动通过FOUP 4210,则鉴于该开口的大小,清扫气体将需要以高体积速率供给,以保持在FOUP内的足够高的过压,从而防止从EFEM到FOUP的倒流。
图43示出了与在图42中相同的装载端口单元4213,所不同的是,该装载端口单元4213配备有可平移或可移动的盖板/槽门4278。该槽门4278可具有在其内的水平槽4246,水平槽4246的宽度大于晶片直径,但是,对比图42的开口,该槽在竖直方向上会小得多。在一些实现方式中,槽可以与晶片架内的晶片间间距具有大约相同的高度。在其他实现方式中,如所示的实现方式中,水平槽4246沿其长度可以具有两个或多个不同的高度。例如,水平槽4246可具有一个高度(“A”) 和第二高度“B”, 高度“A”其尺寸被设计为使得当晶片插入FOUP或从FOUP取出时能有晶片间隙,但高度“A”至少比晶片间距间的高度的两倍小,第二高度“B” 比高度“A”大,例如,大或高2至3倍;这个较高的高度区域可以被设定尺寸以使得能有附加的间隙,该附加的间隙对于端部执行器伸入FOUP内以取回或放置晶片可能是需要的(端部执行器本身可以是相当薄的,例如,1-2mm,但是它可以与相当厚的机械手腕关节或其他硬件连接)。因此,该水平槽的中间部分比在中间部分的任一侧上的会具有较低的高度(“A”)的侧翼部分可具有较大的高度(“B”)。在这样的实现方式中,“B”高度区域的宽度的尺寸可以被设计为比可以通过在增大高度的区域处的槽门的端部执行器和/或机械手臂部件的宽度稍大,例如,大或高几毫米。应该理解的是,这样的高度变化的水平槽如果需要的话可以在本文所讨论的水平槽的构思中的任何一种中使用。在某些这样的实例中,水平槽的中间部分可在侧翼部分下方延伸以容纳端部执行器的附加厚度,而且也可以以其他方式沿顶部边缘与侧翼部分齐平。在其他实现方式中,中间部分可在侧翼部分之上延伸,但与侧翼部分的底部边缘齐平。在还有的其他实现方式中,中间部分可在侧翼部分的上方和下方延伸。该槽门可以在装载端口单元内竖直移动,以便向上和向下移动槽。
在一些实现方式中,如在图44和45所描绘的那些实现方式中,槽门4278可以向下(图44)或向上(图45)移动,使得水平槽4246被隐藏在装载端口单元4213的前表面4297后面,从而对于气体流有效地“关闭”槽(仍可能会出现一些小的泄漏,但通过槽的批量气体流将在这种配置内被终止)。在使用期间,该槽门4278可以被重新定位,使得该槽处于能够取回或放置在FOUP4210内的晶片之一的位置,如在图46、47和48中示出了三种不同的晶片位置。槽门4278可以通过线性致动器或其他驱动机构(未示出)在装载端口单元内竖直地驱动,线性致动器诸如滚珠丝杠、气动致动器、或液压致动器;该驱动机构可以位于例如外壳体积4296内(见图44),其也可以包封用于移动可移动的FOUP门(其不包括在这些简化表示图中)的硬件和机构。
应当理解,虽然本文的实施例聚焦在用于穿过槽门或类似槽状结构每次取回或插入仅仅一个晶片的槽门构思,这些构思可以扩展到其中槽的尺寸被设置以适应穿过槽门或其他含槽结构每次插入或取回两个或更多个晶片这样的槽构思。在这种情况下,槽的尺寸可以设定为一次容纳2、3、4个或更多个晶片,但是槽总是会足够小,以致在具有该槽门或类似槽结构的装置内的整个晶片堆不能同时通过槽插入或取回。
槽-门技术可以与各种不同类型的半导体晶片搬运设备一起使用,该半导体晶片搬运设备可以同时包含多个晶片,同时允许晶片搬运机械手或其他类型的晶片搬运设备与单独或数量上小于搬运设备中的晶片的满数(full number)的这些晶片进行交互。尽管FOUP是这样的多晶片存储系统的一个示例,但这样的实现方式的其他示例在下文或者本公开的别处进行描述。例如,槽-门构思可以与晶片对准器(如本文更详细地讨论的)、装载锁(如本文更详细地讨论的)、计量站、缓冲站(如本文更详细地讨论的)、装载端口(如本文更详细地讨论的)、颗粒去除器、晶片隧道等一起使用。通常,本文所讨论的槽门构思可以用来在保持于缓冲气体环境中的任何多晶片存储区域或组件和处于大气条件下的相邻的环境之间进行分区。
在图49至53所示的另一种实现方式中,槽门可结合晶片缓冲器一起使用。晶片缓冲器可以例如被支撑在EFEM内的接口上(相比于被支撑在EFEM外部的接口上的FOUP),并可以用于在一定条件下在处理阶段之间临时存储晶片。例如,晶片缓冲器可以被加热,并且可以被供应清扫气体或惰性气体,以保护位于缓冲区内的晶片避免被氧化或其他类型的损害。在许多方面,图49至53的晶片缓冲器实现方式可以类似于在本文前面讨论的槽门FOUP装载端口实现方式,虽然晶片缓冲器可能通常不具有要求移走的任何门,对于FOUP是有要求移走的门的。
如在图49至53所示,晶片缓冲器4928可位于接口4927上,接口4927可以整合用于沿竖直方向上下移动槽门4978的线性致动器或驱动机构4958。在槽门4978内的水平槽4946可以被定位以便与在一个线性致动器位置(见图52)处的在晶片缓冲器4928内的最低晶片位置对准以及与在另一个线性致动器位置(见图50)处的在该缓冲器中的最高晶片位置对准。同时,该槽门4978本身可以是足够大,使得无论水平槽4946位于哪个位置,该槽门4978都封闭晶片缓冲器4928的前部,因此,如在前面的槽门实现方式中一样,流经晶片缓冲器4928的缓冲气体,例如,清扫气体或惰性气体,可以借助水平槽4946或通过可在槽门4978和晶片缓冲器4928壳体之间存在的间隙离开晶片缓冲器4928。因为该间隙可能是相当小的,例如,约几毫米,所以相比于作为整体打开的晶片缓冲器4928的横截面流动面积,可用于逸出缓冲气体的横截面流动面积是相当小的。
图53描绘了图49至52的晶片缓冲器4928的一部分的侧剖视图。可以看出,晶片缓冲器4928支撑晶片4904的阵列,每个晶片4904都支撑在相应的晶片支撑特征4909上;这些晶片支撑特征,或类似于它们的晶片支撑特征,也可以在本文所讨论的其他多晶片存储系统中使用。
可使用的槽门的另一种实现方式是在晶片对准器内。晶片对准器是具有转盘的器件,该转盘能够使晶片旋转,使得晶片与期望的方位对准,在此之后,机械手臂可以拾取晶片以运输到另一个站,其中有角度的方位是合乎期望的。在一些晶片对准器内,可以在晶片对准器上方提供空间,以存储或缓存额外的晶片。图69到72描绘了这样的晶片对准器的一种示例。
在图69到72中,示出了具有缓冲站的晶片对准器69104。晶片对准器69104可以包括其内部体积内的对准器转盘69108;对准器转盘69108可以是能够既绕其中心轴线旋转也能沿中心轴(例如,竖直)平移的。升降销69107的图案可以被布置成具有比转盘旋转外壳较大的直径的圆形阵列。在对准器转盘69108被降低到低于该升降销69107的水平的位置时,机械手端部执行器(未示出)可以将晶片6904放置在升降销69107上。在机械手端部执行器已撤回后,对准器转盘69108可升高以从升降销69107拾取晶片6904。一旦晶片6904从升降销69107移除,对准器转盘69108就可以旋转以实现晶片6904的期望的角度对准。一旦晶片6904被对准,晶片6904就可进一步被对准器转盘69108举起。在这样的操作前,所示出的可伸缩支撑件69106可以朝向它们各自的支撑致动器69105缩回,以使得晶片6904能通过可伸缩支撑件69106而没有碰撞。在对准器转盘69108已经将晶片6904升高至高于可伸缩支撑件69106之后,可伸缩支撑件69106可朝向晶片6904延伸,使得当对准器转盘69108随后降低时,可伸缩支撑件69106可从下方支撑晶片6904。一旦可伸缩支撑件69106处于适当延伸的构造时,对准器转盘69108可以返回到较低的位置,从而将晶片6904留在可伸缩支撑件69106上。然后机械手端部执行器(或另一个机械手的类似端部执行器)可以滑动到晶片6904的下方,以使晶片6904能被抬离可伸缩支撑件69106并从对准器69104撤出。应该理解的是,一个晶片6904可以在另一晶片6904'由可伸缩支撑件69106支撑时对准。还应该理解的是,每级都有其自己的可伸缩支撑件69106的多级晶片存储装置可以被包括在这样的对准器69104中。
在一些实现方式中,对准器转盘还可以被配置成水平地沿两个轴平移,以使得旋转地对准的晶片6904也可以在X和Y方向上对准,即,居中。在一些替代的这样的实现方式中,对准器转盘69108可能不能够平移,但是可伸缩支撑件69106可以是能够这样运动的,并且这样的居中可在晶片6904被可伸缩支撑件69106支撑时,在晶片6904上执行。
当盖在对准器69104上时,除了面向机械手的部分外,对准器69104可具有基本上密封的内部体积。在此实现方式中,该部分基本上封闭在具有水平槽6946的门6978后面,水平槽6946类似于上文相对于本文所讨论的其他槽-门实现方式所描述的水平槽,从而使得单个晶片6904被插入到晶片对准器69104或从晶片对准器69104撤出。因此,如果缓冲气体被引入晶片对准器69104以利用缓冲气体稍微向晶片对准器69104施加过压,从而保护在其内部的晶片6904,保持过压所需的缓冲气体流的水平相比于在具有开放的前部的实现方式中将需要的会显著较低。
如在图70中可以看出的,门6978可以降低,使得当晶片6904被插入晶片对准器69104的下部位置或从晶片对准器69104的下部位置撤回时,水平槽6946与升降销69107的晶片支撑平面对准。在图71中,门6978已被提升,以便使水平槽6946与可伸缩支撑件69106的晶片支撑平面对准,这会使得晶片6904被插入晶片对准器69104的上部位置或从晶片对准器69104的上部位置撤出。在图72中,门6978被进一步升高,使得所述水平槽6946与盖重叠,该定位可用于进一步减小从晶片对准器69104出来的气体流动路径的截面积,从而能降低清扫气体的流率,同时仍保持在晶片对准器69104内的所期望的过压环境。
在另一种实现方式中,槽门可与多晶片装载锁一起使用,在多晶片装载锁中,晶片可以单独装载或卸载。图73描绘了配备了门9678的两晶片装载锁9629的示例,门9678在装载锁9629的大气/制造设施侧上;门可具有在其内部的水平槽9646,并可以是类似于本文所讨论的其他槽-门构思的构造。在图73中,装载锁9629可以具有用于支撑(在这种情况下)两个晶片9604的内部晶片支撑特征(未示出)。装载锁9629可以具有位于所述装载锁室的相对端的闸阀96109或其他气密密封门。闸阀96109的门96110各自可以在关闭位置和打开位置之间操作;在关闭位置时,门96110可气密地密封装载锁9629室体积,使装载锁室能由真空泵(未示出)被抽排至真空。当装载锁室达到足够低的压强环境时,处理环境闸阀96109可以被打开,并且晶片处理机械手可以从装载锁取出晶片9604。
为了从装载锁9629的大气/晶片厂侧往来于装载锁9629内取出或插入晶片,装载锁9629可以首先通过使缓冲气体例如穿过所示出的缓冲气体入口9689流入装载锁9629而与大气压条件保持均衡。如果没有这样的均衡,可能难以打开大气侧闸阀96109(或这种阀可能由于压差而被损坏),并且如果大气侧闸阀96109被打开,则在装载锁9629内部的较低压可能会造成大气空气被吸入到装载锁室内,从而可能污染晶片9604。通过用缓冲气体使制造设备的装载锁室的压强与大气压保持均衡,防止这样的不良效果。一旦压强被均衡,就可以打开大气闸阀96109。当大气侧闸阀96109打开时,缓冲气体可以连续流动进入装载锁9629内,通过维持该流动,装载锁室相对于环境大气压会是稍微过压的,从而防止大气空气流入装载室,在这里,大气空气会潜在地污染晶片。
为了降低维持这种轻微的过压所需要的缓冲气体流的量,装载锁9629可以配备带水平槽9646的门9678。如可以看到的,门9678可以具有水平槽9646,水平槽9646是足够大的,以使得晶片9604能一次从装载锁9629取出一个或一次插入一个到装载锁9629内。但是,门9678也足够大,以阻止大部分缓冲气体流出装载锁室。再次,在门9678和装载锁室之间可以存在小的间隙,以使门9678和装载锁室之间的物理接触(并因此潜在的颗粒产生)被减少或最小化。门9678可以在与一个晶片9604或根据需要与其他物对应的位置之间竖直移动,以便定位水平槽9646,从而使得所期望的晶片9604能被插入装载锁室或从装载锁室移除。
应该理解的是,在某些情况下,可以使用具有固定的一个或多个水平槽的类似的实现方式。例如,通常用在半导体处理工具中的用于封闭晶片传送通道或由晶片穿过的其他通路的闸阀或狭缝阀通常从阀门制造商处购买,并且这种阀的选择会是相当有限的。因此,获得具有非常小的竖直游隙(例如,2.5mm的游隙)的狭缝阀或闸阀(该游隙围绕将通过该阀的晶片的最大截面区域)可能不是可行的,因为这种小孔径的狭缝阀可能无法商购得到。然而,通过将如本文前面所述的具有水平槽的固定板放置在狭缝阀或闸阀的前面或后面可以以比单独使用闸阀或狭缝阀能够达到的程度较大的程度限制缓冲气体流出装载锁。
在非EFEM环境中的用途
本发明的发明人中的一些或全部还设想实现本文所讨论的缓冲气体微气候系统中的一个或多个,如在EFEM缺少(EFEM-less)的半导体处理工具的背景中的水平槽构思和/或缓冲气体分配器之类的系统。这样的系统在非常大的多站式半导体处理工具的背景中可能是特别有用的,在该工具中,半导体晶片可在EFEM或FOUP的保护之外经过大的距离。这样的大的多站式半导体处理工具的这样的示例可能是如此之大,以致这样的工具(假如它们有围绕晶片传送区域的外壳)的内部体积将大到使得,实施整个缓冲气体分配系统(类似图1至5所示的用于EFEM的系统)将需要大量的缓冲气体流动通过该外壳,以便在外壳内实现所需的低浓度的设施空气;如前面所讨论的,这种缓冲气体流会带来严重的成本和/或安全性的问题。
然而,即使让缓冲气体流动通过这样的半导体处理工具的整个晶片传送体积是不可行的,由这样的半导体处理工具处理的晶片仍然可以通过使用本文中所论述的一个或多个缓冲气体微气候系统而被有利地保护。
大的多站式半导体处理工具的一个示例是多站式清洁器或清洗工具。在这种工具中,多个半导体处理室,例如,清洁室,可以定位在三维空间内的不同的位置。某种形式的底盘和框架可在不同位置支撑半导体处理室;该底盘或框架可以是空间构架结构,并且可以具有或可以不具有包围它的面板或壁。
在图54中,示出了多站式清洁工具的侧视图。多站式清洁工具可以具有底座,底座包括水平传送器系统5480,如轨道、传送器带、或由线性致动器或驱动器(诸如滚珠丝杠)驱动的平台,并且可以具有沿其长度定位于不同位置的竖直升降轨道或致动器,以充当竖直传送器5484。此外,还可以具有多个处理室5474,例如,沿底座的长轴定位的清洁站5474A至5474J。在某些实现方式中,这样的处理室5474可以布置于在不同的高度的两个或更多个水平的平面内,如在图54中所示出的。每个处理室5474可具有晶片装载槽或端口5494或其他接口,所述晶片装载槽或端口5494或其他接口被配置成在处理之前接收晶片5404,或处理过的晶片5404在处理后可以通过所述晶片装载槽或端口5494或其他接口从处理室5474移除。
晶片5404可使用多晶片匣或盒5473运输以成组地通过该工具,例如,以5或10个为一组通过。图55示出了多晶片盒5473的侧剖视图。这些多晶片匣或盒5473可包括外壳5498,外壳5498在其内具有可以支撑堆叠的、间隔开的排列5407形式的晶片5404的例如多个凸缘或其他的晶片支撑特征5409。每个多晶片匣或盒5473可具有一个或多个槽门5478,即,包括水平槽5446的滑门5478,槽门5478封闭多晶片匣或盒5473的一个或多个开口端,如前开口5476和后开口5477。槽门5478可以与槽门致动器或驱动机构5479连接,槽门致动器或驱动机构5479被配置为使槽门5478竖直滑动,从而将水平槽5446定位在与多晶片匣或盒5473内的晶片支撑位置中的任何位置对应的位置。槽门5478及其伴随的驱动机构5479在本文中可被称为槽门机构。在一些实现方式中,该槽门机构还可以包括可被用于致动槽门致动器的马达或其他驱动系统。在其他实现方式中,马达或其他驱动系统可以位于工具内,并且当多晶片匣或盒5473被放置在特定的一个位置或多个位置时可以与槽门致动器机械地连接。在这样的实现方式中,一个或多个驱动马达将不会与每个多晶片匣或盒5473一起行进,而是替代地会被固定在合适位置或附连到其他部件,如竖直传送器5484的接口5473,竖直传送器5484连接到多晶片盒以使多晶片盒竖直地升降。可以看出,在槽门5478内的水平槽5446可被驱动,以便被定位于多晶片匣或盒5473内的晶片位置中的任何位置的前方(右手边槽门5478被定位成允许访问最低晶片位置)。在一些实现方式中,槽门5478也可被驱动,使得水平槽5446不与任何晶片位置重叠,例如,如在图55所示的左槽门5478。在这种情况下,缓冲气体泄漏的量甚至可被进一步减少,在当多晶片匣或盒5473正在工具内的不同位置之间运输而没有往返于晶片匣或盒5473内去除或插入晶片5404时的情形下,这样的定位会是特别有用的。
该槽门5478通常可以是匣或盒中的晶片架5407的高度的至少两倍一样长或高,以便确保槽门的非槽部封闭匣或盒的面对槽门的开口端。例如,如果有N个晶片5404在晶片架5407内,并且它们(或支撑它们的晶片支撑件5409)与在晶片架5407内的任何相邻的晶片5404间隔平均距离d,则槽门5478可具有比(2•N - 1)•d大的高度(沿竖直轴)。相应地,水平槽5446可以具有在最低限度的小于(N - 1)•d的高度;在大多数实现方式中,水平槽可以至少在水平槽的作为水平槽的中间部分的侧翼的部分具有2•d或以下或d或以下的高度。例如,水平槽可以在作为该中间部分的侧翼的部分具有约5mm的高度,这对于晶片单独穿过会是足够的游隙,中间部分与穿过所述水平槽的端部执行器/机械臂的上表面和下表面可具有±2.5mm的游隙。每个槽门5478可以被定位在开口中的一个的前面,例如,前开口5476或后开口5477的前面,以便基本上封闭该开口。本教导通常适用于所有在此讨论的槽门实现方式。
因此,如果缓冲气体被引入到匣或盒的内部,大多数或所有的缓冲气体将通过流经窄的水平槽5446或通过围绕槽门5478本身的边缘流动而从匣或盒逸出。由于水平槽5446可设置尺寸为只比晶片5404的直径略宽,以及竖直地设定尺寸,以便减小槽高度到最小或接近最小,同时仍然能够使用机械手臂5402将晶片插入多晶片匣或盒5473以及将晶片从多晶片匣或盒5473撤出,水平槽5446的横截面面积可以比匣或盒开口(例如前开口5476或后开口5477)的横截面面积显著较小。机械手臂5402,例如,机械手臂5402A和5402B,可以被安装到竖直机械手传送器5491,例如,竖直机械手传送器5491A和5491B上,竖直机械手传送器5491可以被用于上下移动机械手臂5402以访问多晶片盒5473,无论多晶片盒5473在什么高度。就本文所讨论的各种其他实现方式而言,槽门5478可以偏离多晶片匣或盒5473一个或几个毫米的间隙5499,以提供操作游隙,由此使得槽门5478能竖直平移,而不摩擦任何(或减少数量的)面对表面。这减少了颗粒污染的可能性,但是同时,为流入多晶片匣或盒5473的缓冲气体提供了另一泄漏路径。尽管这样,相比于缓冲气体流动通过由槽门5478封闭的整个开口的情形,流经水平槽5446和间隙5499的缓冲气体的量仍然会较小。这使得可以使用低流率的缓冲气体,从而降低了所需要的缓冲气体的量,这与将使用较大流率的缓冲气体相比,是较经济的、较安静的、且较安全的。
多个多晶片盒或匣5473可同时被容纳在工具内,并且每个多晶片盒或匣5473可独立地移动到竖直传送器5484的不同位置,并且还可以在水平方向上独立地移动,以使得多晶片匣或盒5473能被重新定位到不同的竖直传送器。在每个多晶片盒或匣5473内的晶片5404可通过晶片搬运机械手或机械手臂5402从多晶片盒或匣5473移除(或放入多晶片盒或匣5473),晶片搬运机械手或机械手臂5402可具有端部执行器5493,端部执行器5493可以是能够到达多晶片盒或匣5473内并撤回或放置晶片5404。机械手臂5402还可以被配置为往来于处理室5474内放置或移走晶片5404。在一些实现方式中,晶片搬运机械手或机械手臂5402可以被配备以在晶片搬运机械手或机械手臂5402的任一侧往来于处理室5474内放置或移走晶片5404;在这种情况下,多晶片匣或盒5473可具有前开口5476和后开口5477两者,以及用于每个这样的开口的槽门机构。在晶片5404只在多晶片盒5473的一侧上撤出或放入多晶片盒5473这样的其他实现方式中,每个多晶片盒5473,可以存在仅仅一个开口以及只有一个对应的槽门机构。
如可以看到的,每个多晶片匣或盒5473可以充当便携式微小环境,当缓冲气体流动通过每个多晶片匣或盒5473时,缓冲气体可以通过流出槽门中的槽以及穿过槽门和该匣或盒之间的任何间隙逸出该匣或盒。如前面所讨论的,这种缓冲气体损失相比于如果不使用槽门会出现的情形,会处于显著较低的速率。当匣或盒被定位在特定的一个或多个位置时,缓冲气体可以通过连接到匣或盒的一个或多个接头的一个或多个柔性软管(未示出),或通过集成到竖直或水平的匣/盒的定位系统的缓冲气体输送系统,例如,通过在与匣或盒内的相应气体端口对准的竖直升降轨道内的一个或多个气体端口,被提供给每个匣或盒。
如所讨论的,图55描绘了图54的匣或盒的特写图。可以看出,该多晶片匣或盒5473可以具有存储在其内的一个或多个晶片5404。在这种情况下,5个晶片5404被存储在多晶片匣或盒5473之内,但较多或较少的晶片5404也可以以这样的方式存储,具体取决于多晶片匣或盒5473的大小。多晶片匣或盒5473的壁可具有配置为支撑多晶片匣或盒5473内的晶片的凸缘,例如,晶片支撑特征5409。可替代地,多晶片匣或盒5473可具有带有朝向匣或盒的中心突出的凸缘的拐角定位柱;所述柱可以彼此间隔开,以使得晶片能在柱之间,在多个方向上,例如沿X轴、沿Y轴、或沿X轴和Y轴两者传送。
图56至62示出了另一多站式半导体处理工具或其部分的不同视图。如在图56中可以看出的,多站式半导体处理工具可以具有底盘5672,底盘5672可以支撑多个半导体处理室5674。图57与图56相同,但为清晰起见,底盘5672被移除了。图58是图57的剖面版本,其中,多个组件已被切去;这些组件是竖直机械臂传送器5691和竖直晶片盒传送器5684(这些组件的切平面被画交叉线)。在本实施例中,有十六个半导体处理室5674A至5674P,它们布置成2×2×8矩形阵列(其中,在 A×B×C中, A =在第一水平方向的室的数量,B =在第二正交水平方向的室的数量,而C =在竖直方向的室的数量)。这样的半导体处理工具可以包括其他配置和数量的半导体处理室,具体取决于特定的配置。例如,这样的工具可包括2×2×1阵列、2×1×2阵列、2×2×2阵列、2×4×1阵列、2×4×2阵列(如所描绘的),或任何其他多室阵列。
多站式半导体处理工具可以具有水平晶片盒传送器5680。在本实施例中,水平晶片盒传送器5680可以由多个平台提供,平台可通过例如滚珠丝杠或其他线性驱动元件沿水平轴平移。每个平台可具有被设计成与多晶片盒5673上的特征连接的特征,以使得多晶片盒5673能由平台来载运。水平晶片盒传送器5680可以被配置为在多个水平位置5681之间,如在第一水平位置5681A、第二水平位置5681B和第三水平位置5681C之间运输多晶片盒5673,这些水平位置中的每一个可以使多晶片盒5673与竖直晶片盒传送器5684(例如,竖直晶片盒传送器5684A、5684B和5684C)对准。每个竖直晶片盒传送器5684可以具有机械接口5685,当多晶片盒5673被在基准竖直位置5686的水平晶片盒传送器5680支撑时,机械接口5685可锁定到定位于水平位置5681中的与该竖直晶片盒输送器5684相对应的水平位置的多晶片盒5673上。该机械接口5685以及上面锁定了机械接口5685的任何多晶片盒5673可以通过它们各自的竖直晶片盒传送器5684升降到不同的竖直位置5687,例如,第一竖直盒位置5687A和第二竖直盒位置5687B。
多站式半导体处理工具还可以包括一个或多个机械手臂5602,诸如机械手臂5602A和机械手臂5602B,它们可被安装到相应的竖直机械臂传送器5691A和5691B上。在一些实现方式中,每个机械手臂5602可以位于水平位置5681中的两个之间。例如,在所描绘的实现方式中,机械手臂5602A可定位在第一水平位置5681A和第二水平位置5681B之间,而机械手臂5602B可以定位在第二间水平位置5681B和第三水平位置5681C之间。竖直机械手臂传送器5691可以被配置为在竖直机械手臂位置5692之间移动机械手臂5602,例如在第一竖直机械手臂位置5692A和第二竖直机械手臂位置5692B之间移动机械手臂5602。当在第一竖直机械手臂位置5692A中时,第一机械手臂5602A可以是能够访问被定位在第一竖直盒位置5687A以及也在第一或第二水平位置5681A或5681B内的多晶片盒5673内的半导体晶片5604的,然后传送这些晶片到半导体处理室5674A至5674D。相应地,当在第二竖直机械手臂位置5692B中时,第一机械手臂5602A可以是能够访问被定位在第二竖直盒位置5687B以及也第一或第二水平位置5681A或5681B内的多晶片盒5673内的半导体晶片5604的,然后传送这些晶片到半导体处理室5674E至5674H。应该理解的是,竖直盒位置5687和竖直机械手臂位置5692并不一定是指固定位置,而是可以指位置范围。例如,当多晶片盒和机械手臂被定位在相应的竖直位置时,可能有必要相对于多晶片盒竖直地移动机械手臂小的量,以访问在晶片架5607内的不同高度处的晶片5604。替代地或附加地,该多晶片盒可以移动这样小的竖直量,以使在晶片架5607内的特定晶片与机械手臂5602的端部执行器对准,从而使得机械手臂5602能移走或插入晶片5604。因此,术语“竖直盒位置”5687和“竖直机械手臂位置”5692应被理解为是指特定的竖直位置+/-晶片架5607的高度。
类似地,当在第一竖直机械手臂位置5692A中时,第二机械手臂5602B可以是能够访问被定位在第一竖直盒位置5687A以及也在第二或第三水平位置5681B或5681C的多晶片盒5673内的半导体晶片5604的,然后传送这些晶片到半导体处理室5674I至5674L。相应地,当在第二竖直机械手臂位置5692B中时,所述第二机械手臂5602B可以是能够访问被定位在第二竖直盒位置5687B以及也在第二或第三水平位置5681B或5681C的多晶片盒5673内的半导体晶片5604的,然后传送这些晶片到半导体处理室5674M 至5674P。多晶片盒5673可作为多晶片存储系统,其可穿梭通过多站式半导体处理工具,以使得包含在其内的晶片能被往来于所述半导体处理室中的不同室传送。
多晶片盒5673可以被配置为具有流动通过它们的缓冲气体。例如,多晶片盒5673可具有一个或多个缓冲气体入口5689(见图59和60),缓冲气体入口5689可以与缓冲气体端口连接,例如,与缓冲气体端口5688或在机械接口5685的下侧上的对应的缓冲气体端口连接。当多晶片盒5673停靠在水平晶片盒传送器5680的平台中的一个上时,缓冲气体可以通过缓冲气体端口5688和缓冲气体入口5689被提供给多晶片盒5673。相应地,当多晶片盒5673被锁定到机械接口5685上时,该多晶片盒5673可以通过位于机械接口5685内的缓冲气体端口和与机械接口5685的缓冲气体端口连接的缓冲气体入口5689提供缓冲气体。缓冲气体可以在多站式半导体处理工具中的任何位置被提供给多晶片盒5673,从而使得包含在多晶片盒5673内的晶片能被缓冲气体包围,并且至少在某种程度上通过缓冲气体得到保护而不受环境设施空气的影响。
图59和60是多晶片盒5673中的一个的视图;图59示出了多晶片盒5673的上侧,而图60示出了多晶片盒5673的下侧。多晶片盒5673可具有槽-门机构,每一个槽-门机构具有驱动机构5679和带水平槽5646的门5678。一个槽-门机构可被定位成使得相应的门5678被定位在多晶片盒5673的前开口的前部;另一槽-门机构可被定位成使得相应的门5678被定位在该多晶片盒5673的后开口的前部。多晶片盒5673可具有缓冲气体入口5689。底部缓冲气体入口5689可与位于水平晶片盒传送器5680上的缓冲气体端口5688中的一个连接;上部气体入口5689可与位于机械接口5685中的一个上的缓冲气体端口连接。
图61和62描绘了图59的多晶片盒5673的剖视图。在图61中,多晶片盒5673的一侧已被去除(以不同类型的交叉影线显示切断表面)。如在图61是可见的,气室56101位于多晶片盒5673的每个侧壁之内;气室56101被插入多晶片盒5673的前开口和后开口之间,并且可以通过分配通道56102而被提供有缓冲气体,每一个分配通道56102与缓冲气体入口5689中的不同的一个连接。缓冲气体入口5689各自可配备有单向阀,例如止回阀,其使得缓冲气体能通过缓冲气体入口5689流入分配通道56102,但是其会阻止缓冲气体沿相反方向流动。因此,缓冲气体可以通过任一缓冲气体入口5689被引入到气室56101内,即使当其他缓冲气体入口5689不与缓冲气体源连接时也如此。气室56101可以具有多个分配端口56100,多个分配端口56100可排列成阵列,以使得缓冲气体能流入在多晶片盒5673内的晶片5604之间的各晶片间间隙。当然,在其中多晶片盒没有用缓冲气体清扫的实现方式中,例如,在其中仅使用缓冲气体分配器5605的系统中,这样的特征可以被省略。
图63至68描绘了具有在不同位置的门5678的多晶片盒5673的前视图。在图63中,门5678是在升高的位置,使得槽5646不与在晶片架5607内的任何晶片5604对准。门5678的这种定位可在没有晶片被传送进出多晶片盒5673时使用。附图64至68中的每个示出了定位成与在晶片架5607内的晶片5604中的不同的一个对准的门5678。
在实践中,该多站式半导体处理工具可利用具有槽门机构的多晶片盒5673实现,如图59至68所示出的。多站式半导体处理工具也可利用具有缓冲气体分配器5605的机械手臂5602,缓冲气体分配器5605可以是本文所讨论的任何缓冲气体分配器。在一些实现方式中,只有这些缓冲气体微气候系统中的一个可被使用,但双重方法可以在多站式半导体处理工具内的所有位置提供增强的缓冲气体保护。在一些实现方式中,水平晶片盒传送器的一端或两端可类似于本文所讨论的其他实现方式通向具有缓冲气体环境的EFEM。还应理解的是,如以上所讨论的多站式工具之类的多站式工具也可以是封闭或半封闭的,并且缓冲气体可以流动通过整个工具,类似于本文前面所讨论的这种缓冲气体流动通过EFEM的方式。
还应当理解,本文所讨论的槽门构思会涉及具有进一步降低的竖直高度的水平槽。在这种系统中,具有水平槽的门可以由控制器进行控制,以便在通过水平槽放置或取回晶片期间与竖直运动的端部执行器前后(in tandem)移动。因此,水平槽不需要包含附加的高度,为了适应机械手臂在拾取和放置晶片期间可能产生的小的竖直运动,这种附加的高度通常会是必要的。
本公开中所描述的实现方式的各种修改对本领域的普通技术人员而言会是显而易见的,并且本文定义的一般原理可应用于其他实现方式而不偏离本公开的精神或范围。因此,本公开并非意指受限于本文所示的实现方式,而是应被赋予与在发明所公开的权利要求、原则和新颖特征一致的最广的范围。
如从上述讨论中显而易见的,在本说明书在分开的实现方式的背景中描述的某些特征也可以结合单一的实现方式来实现。相反地,在单一的实现方式的背景中描述的各种特征可以在分开的多个实现方式中或者在任何合适的子组合中实现。此外,虽然特征在上文被描述为以某些组合操作,甚至最初被主张如此,但是来自所主张的组合的一个或多个特征在某些情况下可以从该组合中切割开来,并且所主张的组合可以被引向子组合或子组合的变型。
应该理解的是,除非在任何特定描述的实现方式中的特征被明确确定为彼此不兼容或周围背景暗示它们是相互排斥的,并且不容易以互补和/或支持的方式组合,否则本公开总体上构思和设想这些互补的实现方式的具体特征可以选择性地组合,以提供一个或多个全面的、但略有不同的技术方案。因此,应进一步理解的是,上面的描述已经仅通过示例方式给出,并且详细的修改可以在本公开的范围内作出。
Claims (17)
1.一种用于处理半导体晶片的装置,其包括:
多个晶片处理室,其定位在不同的位置;
底盘,其支撑在所述不同的位置上的所述晶片处理室;
一个或多个多晶片盒,每个多晶片盒具有沿竖直轴布置在阵列中的N个晶片支撑结构,其中所述晶片支撑结构的尺寸设置为支撑直径为D的半导体晶片,N为大于1的整数,并且每个半导体晶片支撑结构与所述阵列中的任何相邻的晶片支撑结构或多个晶片支撑结构以平均距离d间隔开;
一个或多个机械手臂,每个臂具有配置成在该机械手臂的运动期间支撑半导体晶片的端部执行器,其中所述一个或多个机械手臂被配置成传送半导体晶片来往于所述一个或多个多晶片盒并到所述多个晶片处理室;以及
至少一个缓冲气体微气候系统,其包括至少一个槽-门机构,其是所述一个或多个多晶片盒中的每个的一部分,其中每个槽-门机构包括板形式的门,其具有大于D的宽度和小于(N-1)·d的高度的水平槽。
2.根据权利要求1的所述的用于处理半导体晶片的装置,其中:
每个多晶片盒具有前开口,所述前开口的尺寸设置为允许晶片被插入到所述多晶片盒或从所述多晶片盒取出;
每个槽-门机构包括驱动机构,其被配置成响应于机械输入,使所述门相对于所述多晶片盒的所述晶片支撑结构竖直平移,所述门是所述多晶片盒的一部分;
每个门具有大于(2·N-1)·d的高度;以及
每个门被设置在所述多晶片盒的所述前开口的前面,所述门是所述多晶片盒的一部分。
3.根据权利要求1所述的用于处理半导体晶片的装置,其中所述至少一个缓冲气体微气候系统进一步包括被配置成使缓冲气体流动跨越由所述一个或多个端部执行器支撑的半导体晶片的面对表面的一个或多个缓冲气体分配器,其中:
所述一个或多个缓冲气体分配器中的每个与所述一个或多个端部执行器中的不同的一个相关联,
每个缓冲气体分配器被配置成在其中所相关联的所述端部执行器是其一部分的所述机械手臂的至少一些运动期间随着所相关联的所述端部执行器一起运动,
每个缓冲气体分配器和相关联的端部执行器间隔开,使得当所述N个半导体晶片由所述N个晶片支撑结构支撑时,所述缓冲气体分配器和所相关联的所述端部执行器能插入由所述N个晶片支撑结构支撑的所述N个半导体晶片的堆中,以及
每个缓冲气体分配器和相关联的端部执行器各自的尺寸设成配合在所述N个半导体晶片的堆内的晶片间的间隙内。
4.根据权利要求2所述的用于处理半导体晶片的装置,其还包括水平晶片盒传送器,其被配置为接收所述一个或多个多晶片盒中的至少一个并沿水平轴在水平位置之间平移所述一个或多个多晶片盒中所接收的至少一个,其中:
所述晶片处理室被定位在所述水平晶片盒传送器的任一侧上的间隔开的位置,以及
所述一个或多个机械手臂中的第一机械手臂被配置为当所述一个或多个多晶片盒中的第一多晶片盒被至少设置在所述水平位置的第一水平位置时,在所述第一多晶片盒与所述晶片处理室中的第一晶片处理室、所述晶片处理室中的第二晶片处理室、所述晶片处理室中的第三晶片处理室、以及所述晶片处理室中的第四晶片处理室之间输送半导体晶片,
所述第一晶片处理室和所述第二晶片处理室位于所述水平晶片盒传送器的第一侧面上,
所述第三晶片处理室和所述第四晶片处理室位于所述水平晶片盒传送器的第二侧面上,以及
所述水平晶片盒传送器的所述第一侧面在所述水平晶片盒传送器的与所述水平晶片盒传送器的所述第二侧面相对的侧面上。
5.根据权利要求4所述的用于处理半导体晶片的装置,其还包括一个或多个竖直晶片盒传送器,其中:
每个竖直晶片盒传送器与所述水平位置中的不同的一个相关联;
所述一个或多个竖直晶片盒传送器中的第一竖直晶片盒传送器与所述第一水平位置相关联;
每个竖直晶片盒传送器包括一个或多个机械接口;
每个竖直晶片盒传送器的每个机械接口被配置为,当该机械接口与该多晶片盒竖直对准并且该多晶片盒被定位在与该竖直晶片盒传送器相关联的水平位置上并且由在基线竖直位置上的所述水平晶片盒传送器支撑时,与所述一个或多个多晶片盒中的多晶片盒对接;
每个竖直晶片盒传送器被配置为使包含在该竖直晶片盒传送器中的一个或多个机械接口以及与这些一个或多个机械接口对接的每个多晶片盒沿竖直轴平移至一个或多个竖直盒位置;
所述竖直盒位置与所述基线竖直位置位于不相同的高度;以及
所述第一机械手臂被配置为当所述第一多晶片盒定位在所述第一水平位置上并且还通过所述第一竖直晶片盒传送器定位在所述一个或多个竖直盒位置中的第一竖直盒位置时,在所述第一多晶片盒与所述第一晶片处理室、所述第二晶片处理室、所述第三晶片处理室以及所述第四晶片处理室之间输送半导体晶片。
6.根据权利要求5所述的用于处理半导体晶片的装置,其中:
每个机械接口包括至少一个缓冲气体端口,
每个多晶片盒包括至少一个缓冲气体入口,以及
当该多晶片盒与该机械接口对接时,每个多晶片盒中的所述至少一个缓冲气体入口与每个机械接口的至少一个缓冲气体端口对准,由此允许缓冲气体经由该至少一个缓冲气体端口和至少一个缓冲气体入口被引入到多晶片盒的内部体积。
7.根据权利要求5所述的用于处理半导体晶片的装置,其中:
所述一个或多个竖直晶片盒传送器中的第二竖直晶片盒传送器与所述水平位置的第二水平位置相关联;
所述第一机械手臂置于所述第一水平位置和所述第二水平位置之间;
每个多晶片盒还包括后开口,该后开口的尺寸也被设置为允许半导体晶片被插入到该多晶片盒或从该多晶片盒中取出,并且所述后开口与该多晶片盒的所述前开口相对;
对于每个多晶片盒,作为所述一个或多个多晶片盒中的每个的一部分的所述至少一个槽-门机构包括第二槽-门机构;
每个第二槽-门机构的门被定位在所述多晶片盒的后开口的前面,其中所述第二槽-门机构是所述一个或多个多晶片盒的一部分;
所述第一机械手臂还配置为,当第二多晶片盒被定位在所述第二水平位置上并通过所述第二竖直晶片盒传送器定位在所述第一竖直盒位置上时,在所述第二多晶片盒与所述第一晶片处理室、所述第二晶片处理室、所述第三晶片处理室和所述第四晶片处理室之间传送半导体晶片;以及
所述第二多晶片盒是所述一个或多个多晶片盒中的一个。
8.根据权利要求7所述的用于处理半导体晶片的装置,其进一步包括:
一个或多个竖直机械手臂传送器;
所述晶片处理室中的第五晶片处理室;
所述晶片处理室中的第六晶片处理室;
所述晶片处理室中的第七晶片处理室;以及
所述晶片处理室中的第八晶片处理室,其中:
所述第五晶片处理室、所述第六晶片处理室、所述第七晶片处理室和所述第八晶片处理室位于所述第一晶片处理室、所述第二晶片处理室、所述第三晶片处理室和所述第四晶片处理室上方,
所述一个或多个竖直机械手臂传送器中的每一个置于相邻的竖直晶片盒传送器之间,
每个竖直机械手臂传送器被配置成沿竖直轴平移所述一个或多个机械手臂中的相应的一个至一个或多个竖直机械手臂位置,
所述一个或多个竖直机械手臂位置中的第一竖直机械手臂位置与所述第一竖直盒位置相关联,
所述一个或多个竖直机械手臂位置中的第二竖直机械手臂位置与所述一个或多个竖直盒位置中的与所述第一竖直盒位置不同的第二竖直盒位置相关联,
所述第一机械手臂被配置为当所述第一多晶片盒定位在所述第一水平位置上和所述第一竖直盒位置上并且所述第一机械手臂被定位在所述第一竖直机械手臂位置上时,在所述第一多晶片盒与所述第一晶片处理室、所述第二晶片处理室、所述第三晶片处理室和所述第四晶片处理室之间传送半导体晶片,以及
所述第一机械手臂被进一步配置为,在所述第一多晶片盒被定位在所述第一水平位置上和所述第二竖直盒位置上并且所述第一机械手臂被定位在所述第二竖直机械手臂位置上时,在所述第一多晶片盒与所述第五晶片处理室、所述第六晶片处理室、所述第七晶片处理室和所述第八晶片处理室之间传送半导体晶片。
9.根据权利要求8所述的用于处理半导体晶片的装置,其进一步包括:
所述晶片处理室中的第九晶片处理室;
所述晶片处理室中的第十晶片处理室;
所述晶片处理室中的第十一晶片处理室;
所述晶片处理室中的第十二晶片处理室;
所述晶片处理室中的第十三晶片处理室;
所述晶片处理室中的第十四晶片处理室;
所述晶片处理室中的第十五晶片处理室;以及
所述晶片处理室中的第十六晶片处理室,其中:
所述第九晶片处理室、所述第十晶片处理室、所述第十三晶片处理室和所述第十四晶片处理室位于所述水平晶片盒传送器的第一侧面上,
所述第十一晶片处理室、所述第十二晶片处理室、所述第十五晶片处理室和所述第十六晶片处理室位于所述水平晶片盒传送器的第二侧面上,
所述第十三晶片处理室、所述第十四晶片处理室、所述第十五晶片处理室和所述第十六晶片处理室位于所述第九晶片处理室、所述第十晶片处理室、所述第十一晶片处理室和所述第十二晶片处理室上方,
所述第二水平位置置于所述一个或多个机械手臂中的所述第一机械手臂和第二机械手臂之间,
所述第二机械手臂被配置为当所述第二多晶片盒定位在所述第二水平位置上和所述第一竖直盒位置上并且所述第二机械手臂被定位在所述第一竖直机械手臂位置上时,在所述第二多晶片盒与所述第九晶片处理室、所述第十晶片处理室、所述第十一晶片处理室和所述第十二晶片处理室之间传送半导体晶片,以及
所述第二机械手臂被进一步配置为在所述第二多晶片盒被定位在所述第二水平位置上和所述第二竖直盒位置上并且所述第二机械手臂被定位在所述第二竖直机械手臂位置上时,在所述第二多晶片盒与所述第十三晶片处理室、所述第十四晶片处理室、所述第十五晶片处理室和所述第十六晶片处理室之间传送半导体晶片。
10.根据权利要求9所述的用于处理半导体晶片的装置,其中,所述至少一个缓冲气体微气候系统进一步包括配置成使缓冲气体流动跨越由所述一个或多个端部执行器支撑的所述半导体晶片的面对表面的一个或多个缓冲气体分配器,其中:
所述一个或多个缓冲气体分配器中的每一个与所述一个或多个端部执行器中的不同的一个相关联,
每个缓冲气体分配器被配置成在所相关联的端部执行器是其一部分的所述机械手臂的至少一些运动期间随着所相关联的所述端部执行器一起运动,
每个缓冲气体分配器和相关联的端部执行器间隔开,使得当所述N个半导体晶片由所述N个晶片支撑结构支撑时,该缓冲气体分配器和相关联的端部执行器能插入由所述N个晶片支撑结构支撑的N个半导体晶片的堆中,以及
每个缓冲气体分配器和相关联的端部执行器各自的尺寸被设置为配合在所述N个半导体晶片的堆中的晶片间的间隙内。
11.根据权利要求3所述的用于处理半导体晶片的装置,进一步包括水平晶片盒传送器,其被配置成接收所述一个或多个多晶片盒中的至少一个并沿水平轴在水平位置之间平移所述一个或多个多晶片盒中所接收的至少一个,其中:
所述晶片处理室被定位在所述水平晶片盒传送器的任一侧上的间隔开的位置上,
所述一个或多个机械手臂中的第一机械手臂被配置为,当第一多晶片盒被至少定位在所述水平位置中的第一水平位置上时,在所述一个或多个多晶片盒中的所述第一多晶片盒与所述晶片处理室中的第一晶片处理室、所述晶片处理室中的第二晶片处理室、所述晶片处理室中的第三晶片处理室,和所述晶片处理室中的第四晶片处理室之间传送半导体晶片,
所述第一机械手臂与所述一个或多个缓冲气体分配器中的第一缓冲气体分配器相关联,
所述第一晶片处理室和所述第二晶片处理室位于所述水平晶片盒传送器的第一侧面上,
所述第三晶片处理室和所述第四晶片处理室位于所述水平晶片盒传送器的第二侧面上,以及
所述水平晶片盒传送器的所述第一侧面是在所述水平晶片盒传送器的与所述水平晶片盒传送器的所述第二侧面相对的侧面。
12.根据权利要求11所述的用于处理半导体晶片的装置,还包括一个或多个竖直晶片盒传送器,其中:
每个竖直晶片盒传送器与所述水平位置中的不同的一个相关联;
所述一个或多个竖直晶片盒传送器中的第一竖直晶片盒传送器与所述第一水平位置相关联;
每个竖直晶片盒传送器包括一个或多个机械接口;
每个竖直晶片盒传送器的每个机械接口被配置为,当该机械接口与该多晶片盒竖直对准并且该多晶片盒被定位在与该竖直晶片盒传送器相关联的所述水平位置上并且由在基线竖直位置上的所述水平晶片盒传送器支撑时,与所述一个或多个多晶片盒中的多晶片盒对接;
每个竖直晶片盒传送器被配置为,将包含在该竖直晶片盒传送器中的所述一个或多个机械接口,以及与这些一个或多个机械接口对接的每个多晶片盒,沿竖直轴平移到一个或多个竖直盒位置上;
所述竖直盒位置位于与所述基线竖直位置不相同的高度;以及
所述第一机械手臂被配置为,在所述第一多晶片盒被定位在所述第一水平位置上并且还通过所述第一竖直晶片盒传送器定位在所述一个或多个竖直盒位置中的第一竖直盒位置上时,在所述第一多晶片盒与所述第一晶片处理室、所述第二晶片处理室、所述第三晶片处理室以及所述第四晶片处理室之间传送半导体晶片。
13.根据权利要求12所述的用于处理半导体晶片的装置,其中:
每个机械接口包括至少一个缓冲气体端口,
每个多晶片盒包括至少一个缓冲气体入口,以及
当该多晶片盒与该机械接口对接时,每个多晶片盒的所述至少一个缓冲气体入口与每个机械接口的所述至少一个缓冲器气体端口对准,由此允许缓冲气体经由至少一个缓冲气体端口和至少一个缓冲气体入口被引入到该多晶片盒的内部体积。
14.根据权利要求12所述的用于处理半导体晶片的装置,其中:
所述一个或多个竖直晶片盒传送器中的第二竖直晶片盒传送器与所述水平位置的第二水平位置相关联;
所述第一机械手臂置于所述第一水平位置和所述第二水平位置之间;
每个多晶片盒还包括后开口,该后开口的尺寸也被设置为允许半导体晶片能被插入到该多晶片盒或从该多晶片盒中取出,并且所述后开口与该多晶片盒的前开口相对;
所述第一机械手臂还被配置为,当第二多晶片盒被定位在所述第二水平位置并通过所述第二竖直晶片盒传送器定位在所述第一竖直带盒位置上时,在第二多晶片盒与所述第一晶片处理室、所述第二晶片处理室、所述第三晶片处理室和所述第四晶片处理室之间传送半导体晶片;以及
所述第二多晶片盒是所述一个或多个多晶片盒中的一个。
15.根据权利要求14所述的用于处理半导体晶片的装置,进一步包括:
一个或多个竖直机械手臂传送器;
所述晶片处理室中的第五晶片处理室;
所述晶片处理室中的第六晶片处理室;
所述晶片处理室中的第七晶片处理室;以及
所述晶片处理室中的第八晶片处理室,其中:
所述第五晶片处理室、所述第六晶片处理室、所述第七晶片处理室和所述第八晶片处理室位于所述第一晶片处理室、所述第二晶片处理室、所述第三晶片处理室和所述第四晶片处理室上方,
所述一个或多个竖直机械手臂传送器中的每一个置于相邻的竖直晶片盒传送器之间,
每个竖直机械手臂传送器被配置成将所述一个或多个机械手臂中的相应的一个沿所述竖直轴平移至一个或多个竖直机械手臂位置上,
所述一个或多个竖直机械手臂位置中的第一竖直机械手臂位置与所述第一竖直盒位置相关联,
所述一个或多个竖直机械手臂位置中的第二竖直机械手臂位置与所述一个或多个竖直盒位置中的与所述第一竖直盒位置不同的第二竖直盒位置相关联,
所述第一机械手臂被配置为,在所述第一多晶片盒定位在所述第一水平位置上和所述第一竖直盒位置上并且所述第一机械手臂被定位在所述第一竖直机械手臂位置上时,在所述第一多晶片盒与所述第一晶片处理室、所述第二晶片处理室、所述第三晶片处理室和所述第四晶片处理室之间传送半导体晶片,以及
所述第一机械手臂被进一步配置为,当所述第一多晶片盒被定位在所述第一水平位置和所述第二竖直盒位置上并且所述第一机械手臂被定位在所述第二竖直机械手臂位置上时,在所述第一多晶片盒与所述第五晶片处理室、所述第六晶片处理室、所述第七晶片处理室和所述第八晶片处理室之间传送半导体晶片。
16.根据权利要求15所述的用于处理半导体晶片的装置,进一步包括:
所述晶片处理室中的第九晶片处理室;
所述晶片处理室中的第十晶片处理室;
所述晶片处理室中的第十一晶片处理室;
所述晶片处理室中的第十二晶片处理室;
所述晶片处理室中的第十三晶片处理室;
所述晶片处理室中的第十四晶片处理室;
所述晶片处理室中的第十五晶片处理室;和
所述晶片处理室中的第十六晶片处理室,其中:
所述第九晶片处理室、所述第十晶片处理室、所述第十三晶片处理室和所述第十四晶片处理室位于所述水平晶片盒传送器的第一侧面上,
所述第十一晶片处理室、所述第十二晶片处理室、所述第十五晶片处理室和所述第十六晶片处理室位于所述水平晶片盒传送器的第二侧面上,
所述第十三晶片处理室、所述第十四晶片处理室、所述第十五晶片处理室和所述第十六晶片处理室位于所述第九晶片处理室、所述第十晶片处理室、所述第十一晶片处理室和所述第十二晶片处理室上方,
所述第二水平位置置于所述一个或多个机械手臂中的所述第一机械手臂与第二机械手臂之间,
所述第二机械手臂被配置为,当所述第二多晶片盒被定位在所述第二水平位置和所述第一竖直盒位置上并且所述第二机械手臂被定位在所述第一竖直机械手臂位置上时,在所述第二多晶片盒与所述第九晶片处理室、所述第十晶片处理室、所述第十一晶片处理室和所述第十二晶片处理室之间传送半导体晶片,以及
所述第二机械手臂被进一步配置为,当所述第二多晶片盒被定位在所述第二水平位置和所述第二竖直盒位置上并且所述第二机械手臂被定位在所述第二竖直机械手臂位置上时,在所述第二多晶片盒与所述第十三晶片处理室、所述第十四晶片处理室、所述第十五晶片处理室和所述第十六晶片处理室之间传送半导体晶片。
17.根据权利要求16所述的用于处理半导体晶片的装置,其中所述至少一个缓冲气体微气候系统还包括作为所述一个或多个多晶片盒中的每一个的一部分的所述至少一个槽-门机构,其中:
每个多晶片盒具有前开口,所述前开口的尺寸被设置为允许晶片被插入到所述多晶片盒或从所述多晶片盒取出;
每个槽-门机构包括驱动机构,其被配置成响应于机械输入,使所述门相对于所述多晶片盒的所述晶片支撑结构竖直平移,该门是所述多晶片盒的一部分;
每个门具有大于(2·N-1)·d的高度;以及
每个门被设置所述多晶片盒的所述前开口的前面,该门是所述多晶片盒的一部分。
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562240404P | 2015-10-12 | 2015-10-12 | |
| US62/240,404 | 2015-10-12 | ||
| US201662286241P | 2016-01-22 | 2016-01-22 | |
| US62/286,241 | 2016-01-22 | ||
| US15/285,843 US10515834B2 (en) | 2015-10-12 | 2016-10-05 | Multi-station tool with wafer transfer microclimate systems |
| US15/285,843 | 2016-10-05 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107068601A CN107068601A (zh) | 2017-08-18 |
| CN107068601B true CN107068601B (zh) | 2020-06-16 |
Family
ID=58635097
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201610879720.9A Active CN107068601B (zh) | 2015-10-12 | 2016-10-08 | 包括水平槽和/或移动喷头的晶片输送微气候技术和装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10515834B2 (zh) |
| JP (1) | JP2017108112A (zh) |
| KR (1) | KR20170054226A (zh) |
| CN (1) | CN107068601B (zh) |
| TW (1) | TW201727798A (zh) |
Families Citing this family (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6099945B2 (ja) * | 2012-11-22 | 2017-03-22 | 東京エレクトロン株式会社 | 蓋開閉機構、遮蔽機構及び容器の内部パージ方法 |
| US10354908B2 (en) | 2016-11-29 | 2019-07-16 | Taiwan Semiconductor Manufacturing Company, Ltd. | Semiconductor tool with a shield |
| EP3605598B1 (en) * | 2017-05-11 | 2024-05-01 | Rorze Corporation | Thin-plate substrate holding finger and transfer robot provided with said finger |
| JP6930224B2 (ja) * | 2017-05-31 | 2021-09-01 | Tdk株式会社 | Efem及びefemへの置換ガスの導入方法 |
| US10566216B2 (en) | 2017-06-09 | 2020-02-18 | Lam Research Corporation | Equipment front end module gas recirculation |
| US10403539B2 (en) * | 2017-08-04 | 2019-09-03 | Kawasaki Jukogyo Kabushiki Kaisha | Robot diagnosing method |
| JP7037379B2 (ja) * | 2018-02-06 | 2022-03-16 | ローツェ株式会社 | 薄板状基板保持装置、及び保持装置を備える搬送ロボット |
| CN108336002A (zh) * | 2018-03-16 | 2018-07-27 | 德淮半导体有限公司 | 清扫装置及清扫晶圆的方法、机械臂 |
| US11121014B2 (en) * | 2018-06-05 | 2021-09-14 | Asm Ip Holding B.V. | Dummy wafer storage cassette |
| CN112470252B (zh) * | 2018-06-07 | 2024-06-07 | 盛美半导体设备(上海)股份有限公司 | 清洗半导体硅片的装置及方法 |
| WO2019246122A1 (en) * | 2018-06-18 | 2019-12-26 | Lam Research Corporation | Reduced footprint wafer handling platform |
| JP7061031B2 (ja) * | 2018-06-28 | 2022-04-27 | 株式会社日立ハイテク | 半導体ワーク搬送装置 |
| JP7136612B2 (ja) * | 2018-07-13 | 2022-09-13 | ローツェ株式会社 | 局所パージ機能を有する搬送装置 |
| US11373891B2 (en) * | 2018-10-26 | 2022-06-28 | Applied Materials, Inc. | Front-ducted equipment front end modules, side storage pods, and methods of operating the same |
| US11244844B2 (en) | 2018-10-26 | 2022-02-08 | Applied Materials, Inc. | High flow velocity, gas-purged, side storage pod apparatus, assemblies, and methods |
| JP7261000B2 (ja) * | 2018-12-03 | 2023-04-19 | キヤノン株式会社 | 容器、処理装置、異物除去方法、および物品の製造方法 |
| JP7341694B2 (ja) * | 2019-03-26 | 2023-09-11 | キヤノン株式会社 | 搬送装置、搬送方法、リソグラフィ装置、リソグラフィシステム、および物品製造方法 |
| JP7320369B2 (ja) * | 2019-04-17 | 2023-08-03 | 株式会社アルバック | 基板処理装置 |
| JP7323342B2 (ja) * | 2019-06-17 | 2023-08-08 | 株式会社ディスコ | 加工装置 |
| US11929273B2 (en) * | 2019-08-30 | 2024-03-12 | Taiwan Semiconductor Manufacturing Company Limited | Semiconductor fabrication system and method |
| JP2023527725A (ja) * | 2020-05-29 | 2023-06-30 | エルピーイー ソシエタ ペル アチオニ | オーバーヘッドスクリーンを有する基板を取り扱うためのツール、並びに関連する取り扱い方法及びエピタキシャル反応器 |
| US12002696B2 (en) * | 2020-06-30 | 2024-06-04 | Brooks Automation Us, Llc | Substrate mapping apparatus and method therefor |
| CN111958615A (zh) * | 2020-08-19 | 2020-11-20 | 西安奕斯伟硅片技术有限公司 | 一种用于搬送晶圆的组件及方法 |
| KR102610837B1 (ko) * | 2020-12-29 | 2023-12-06 | 세메스 주식회사 | 기판과 기판을 접합하기 위한 기판 접합 설비에서의 기판 보관 및 정렬 장치 |
| US20230138326A1 (en) * | 2021-10-28 | 2023-05-04 | Applied Materials, Inc. | Model-Based Controlled Load Lock Pumping Scheme |
| KR102699857B1 (ko) * | 2023-04-17 | 2024-08-28 | 주식회사 동양기술 | 이상 감지 청정 유지 시스템 |
Family Cites Families (76)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3105216A (en) * | 1960-12-19 | 1963-09-24 | Waters Mfg Inc | Potentiomerter |
| US4306655A (en) * | 1980-04-07 | 1981-12-22 | Smith Richard D | Holder or container for tape cartridges |
| US4453785A (en) * | 1980-04-07 | 1984-06-12 | Smith Richard D | Modular cabinet for different video game cartridges, cassettes, and instruction booklets |
| US5080549A (en) | 1987-05-11 | 1992-01-14 | Epsilon Technology, Inc. | Wafer handling system with Bernoulli pick-up |
| US5255970A (en) * | 1992-05-26 | 1993-10-26 | Theosabrata Yos S | Storage cabinet |
| US6645355B2 (en) * | 1996-07-15 | 2003-11-11 | Semitool, Inc. | Semiconductor processing apparatus having lift and tilt mechanism |
| US5720387A (en) * | 1997-01-15 | 1998-02-24 | Pantech International Inc. | Compact disk storage compartment |
| US6183183B1 (en) * | 1997-01-16 | 2001-02-06 | Asm America, Inc. | Dual arm linear hand-off wafer transfer assembly |
| US20010048866A1 (en) | 1997-12-01 | 2001-12-06 | Fumio Sakiya | Container and loader for substrate |
| US6501070B1 (en) * | 1998-07-13 | 2002-12-31 | Newport Corporation | Pod load interface equipment adapted for implementation in a fims system |
| US6427096B1 (en) | 1999-02-12 | 2002-07-30 | Honeywell International Inc. | Processing tool interface apparatus for use in manufacturing environment |
| US8348583B2 (en) | 1999-10-19 | 2013-01-08 | Rorze Corporation | Container and loader for substrate |
| JP3559213B2 (ja) | 2000-03-03 | 2004-08-25 | 株式会社半導体先端テクノロジーズ | ロードポート及びそれを用いた生産方式 |
| US6652212B2 (en) | 2000-05-02 | 2003-11-25 | Ckd Corporation | Cylinder, load port using it, and production system |
| US6540467B1 (en) * | 2001-06-18 | 2003-04-01 | Lsi Logic Corporation | Apparatus and method of semiconductor wafer protection |
| JP4219579B2 (ja) * | 2001-07-24 | 2009-02-04 | 東京エレクトロン株式会社 | ウエハ移載システム及びウエハ移載方法、並びに無人搬送車システム |
| JP4669643B2 (ja) | 2001-09-17 | 2011-04-13 | ローツェ株式会社 | ウエハマッピング装置およびそれを備えたロードポート |
| WO2003026002A1 (fr) * | 2001-09-18 | 2003-03-27 | Murata Kikai Kabushiki Kaisha | Vehicule a guidage automatique |
| JP2003092335A (ja) * | 2001-09-18 | 2003-03-28 | Toshiba Corp | 基板搬送装置、これを用いた基板処理装置および基板処理方法 |
| US7315373B2 (en) | 2001-11-14 | 2008-01-01 | Rorze Corporation | Wafer positioning method and device, wafer process system, and wafer seat rotation axis positioning method for wafer positioning device |
| JP2003170384A (ja) | 2001-12-04 | 2003-06-17 | Rorze Corp | 平板状物の搬送用スカラ型ロボットおよび平板状物の処理システム |
| US7695234B2 (en) | 2001-12-04 | 2010-04-13 | Rorze Corporation | Device for temporarily loading, storing and unloading a container |
| JP4260423B2 (ja) | 2002-05-30 | 2009-04-30 | ローツェ株式会社 | 円盤状物の基準位置教示方法、位置決め方法および搬送方法並びに、それらの方法を使用する円盤状物の基準位置教示装置、位置決め装置、搬送装置および半導体製造設備 |
| JP4354675B2 (ja) | 2002-06-04 | 2009-10-28 | ローツェ株式会社 | 薄板状電子部品クリーン移載装置および薄板状電子製品製造システム |
| WO2003105216A1 (ja) * | 2002-06-07 | 2003-12-18 | 平田機工株式会社 | 容器搬送システム |
| US6929299B2 (en) * | 2002-08-20 | 2005-08-16 | Asm America, Inc. | Bonded structures for use in semiconductor processing environments |
| KR100497820B1 (ko) | 2003-01-06 | 2005-07-01 | 로체 시스템즈(주) | 유리판절단장치 |
| JP2004281580A (ja) * | 2003-03-13 | 2004-10-07 | Seiko Epson Corp | 搬送装置及び搬送方法 |
| US7638730B2 (en) | 2003-03-21 | 2009-12-29 | Rorze Systems Corporation | Apparatus for cutting glass plate |
| JP4441409B2 (ja) | 2003-03-25 | 2010-03-31 | ローツェ株式会社 | ロボットシミュレーション装置、および、シミュレーションプログラム |
| DE112004003075B4 (de) | 2003-07-17 | 2013-08-01 | Rorze Corp. | Filme mit niedriger Dielektrizitätskonstante und Herstellungsverfahren für diese Filme sowie elektronische Bauteile, die diese Filme verwenden |
| US7425783B2 (en) | 2003-09-08 | 2008-09-16 | Rorze Corporation | Linear motor |
| WO2005038897A1 (ja) | 2003-10-22 | 2005-04-28 | Japan Science And Technology Agency | 液状組成物、その製造方法、低誘電率膜、研磨材および電子部品 |
| KR100555620B1 (ko) * | 2003-10-28 | 2006-03-03 | 주식회사 디엠에스 | 기판 운반시스템 및 운반방법 |
| US20060216137A1 (en) | 2004-07-02 | 2006-09-28 | Katsunori Sakata | Carrying apparatus and carrying control method for sheet-like substrate |
| US7704036B2 (en) | 2004-07-09 | 2010-04-27 | Rorze Corporation | Drive source and transportation robot |
| JP2006228808A (ja) * | 2005-02-15 | 2006-08-31 | Seiko Epson Corp | 基板搬送装置、基板搬送方法及び半導体製造装置 |
| US20070209593A1 (en) | 2006-03-07 | 2007-09-13 | Ravinder Aggarwal | Semiconductor wafer cooling device |
| JP2007273510A (ja) * | 2006-03-30 | 2007-10-18 | Dainippon Screen Mfg Co Ltd | 基板処理装置およびその製造方法 |
| US7954624B2 (en) | 2006-05-16 | 2011-06-07 | Rorze Corporation | Shuttle type conveying device, microplate feeding and collecting device, pickup device for microplate, cassette for microplate, and shelf for containing microplate |
| US20090016862A1 (en) * | 2007-07-12 | 2009-01-15 | Gould Richard H | Method and apparatus for providing flat panel display environmental isolation |
| CN102046338B (zh) | 2008-05-27 | 2014-05-07 | 日商乐华股份有限公司 | 输送装置、位置示教方法以及传感器夹具 |
| US8827695B2 (en) | 2008-06-23 | 2014-09-09 | Taiwan Semiconductor Manufacturing Company, Ltd. | Wafer's ambiance control |
| US9040291B2 (en) | 2008-07-01 | 2015-05-26 | Rorze Corporation | Constant-temperature equipment |
| KR101533307B1 (ko) | 2008-07-01 | 2015-07-02 | 로제 가부시키가이샤 | 항온 장치 |
| US7897525B2 (en) * | 2008-12-31 | 2011-03-01 | Archers Inc. | Methods and systems of transferring, docking and processing substrates |
| JP5279576B2 (ja) * | 2009-03-27 | 2013-09-04 | 大日本スクリーン製造株式会社 | 基板処理装置 |
| JP2013006222A (ja) | 2009-10-14 | 2013-01-10 | Rorze Corp | 薄板状物の把持装置、および薄板状物の把持方法 |
| WO2011065325A1 (ja) | 2009-11-27 | 2011-06-03 | ローツェ株式会社 | 搬送アーム、及びこれを備える搬送ロボット |
| WO2011136604A2 (ko) * | 2010-04-30 | 2011-11-03 | 주식회사 테라세미콘 | 기판 처리 장치 |
| EP2644334B1 (en) | 2010-11-26 | 2019-02-20 | Rorze Corporation | Robot control device and control method |
| US9812343B2 (en) * | 2011-09-14 | 2017-11-07 | Brooks Automation, Inc. | Load station |
| US9048271B2 (en) | 2011-09-29 | 2015-06-02 | Asm International N.V. | Modular semiconductor processing system |
| KR101258403B1 (ko) | 2011-12-09 | 2013-04-30 | 로체 시스템즈(주) | 강화유리 기판 절단방법 |
| KR101251880B1 (ko) | 2011-12-29 | 2013-04-08 | 로체 시스템즈(주) | 웨이퍼 식각장치 및 이를 이용한 웨이퍼 식각방법 |
| TW202203356A (zh) * | 2012-02-10 | 2022-01-16 | 美商布魯克斯自動機械公司 | 基材處理設備 |
| US8676375B2 (en) | 2012-02-27 | 2014-03-18 | Veeco Instruments Inc. | Automated cassette-to-cassette substrate handling system |
| KR102091892B1 (ko) | 2012-04-16 | 2020-03-20 | 로제 가부시키가이샤 | 수납 용기, 수납 용기의 셔터 개폐 유닛 및 이들을 사용한 웨이퍼 스토커 |
| KR101355807B1 (ko) | 2012-09-11 | 2014-02-03 | 로체 시스템즈(주) | 비금속 재료의 곡선 절단방법 |
| US9275886B2 (en) | 2012-10-29 | 2016-03-01 | Rorze Corporation | Device and method for detecting position of semiconductor substrate |
| US20140119858A1 (en) * | 2012-10-31 | 2014-05-01 | Sandisk 3D Llc | Semiconductor Device Manufacturing Line |
| JP6099945B2 (ja) * | 2012-11-22 | 2017-03-22 | 東京エレクトロン株式会社 | 蓋開閉機構、遮蔽機構及び容器の内部パージ方法 |
| KR101372805B1 (ko) | 2012-11-30 | 2014-03-19 | 로체 시스템즈(주) | 웨이퍼 식각 시스템 및 이를 이용한 웨이퍼 식각 공정 |
| US9545724B2 (en) | 2013-03-14 | 2017-01-17 | Brooks Automation, Inc. | Tray engine with slide attached to an end effector base |
| JP6198043B2 (ja) | 2013-06-06 | 2017-09-20 | Tdk株式会社 | ロードポートユニット及びefemシステム |
| US10269603B2 (en) | 2013-07-09 | 2019-04-23 | Kokusai Electric Corporation | Substrate processing apparatus, gas-purging method, method for manufacturing semiconductor device, and recording medium containing abnormality-processing program |
| JP6268425B2 (ja) | 2013-07-16 | 2018-01-31 | シンフォニアテクノロジー株式会社 | Efem、ロードポート、ウェーハ搬送方法 |
| CN104347460B (zh) * | 2013-08-01 | 2017-03-15 | 中微半导体设备(上海)有限公司 | 晶圆传递腔室 |
| US20150088798A1 (en) * | 2013-09-23 | 2015-03-26 | Mastercard International Incorporated | Detecting behavioral patterns and anomalies using metadata |
| SG11201600256XA (en) | 2013-09-26 | 2016-05-30 | Murata Machinery Ltd | Purging device and purging method |
| US9272315B2 (en) | 2013-10-11 | 2016-03-01 | Taiwan Semiconductor Manufacturing Co., Ltd | Mechanisms for controlling gas flow in enclosure |
| JP6287048B2 (ja) | 2013-10-23 | 2018-03-07 | Tdk株式会社 | 基板搬送方法 |
| TWI629744B (zh) | 2013-11-11 | 2018-07-11 | 昕芙旎雅股份有限公司 | Surrounding gas replacement device, substrate transfer device, substrate transfer system, and EFEM |
| TWI749397B (zh) | 2013-12-13 | 2021-12-11 | 日商昕芙旎雅股份有限公司 | 設備前端模組(efem)及半導體製造裝置 |
| US10134621B2 (en) | 2013-12-17 | 2018-11-20 | Brooks Automation, Inc. | Substrate transport apparatus |
| JP6291878B2 (ja) | 2014-01-31 | 2018-03-14 | シンフォニアテクノロジー株式会社 | ロードポート及びefem |
-
2016
- 2016-10-05 US US15/285,843 patent/US10515834B2/en active Active
- 2016-10-07 KR KR1020160129591A patent/KR20170054226A/ko unknown
- 2016-10-07 TW TW105132498A patent/TW201727798A/zh unknown
- 2016-10-07 JP JP2016198583A patent/JP2017108112A/ja active Pending
- 2016-10-08 CN CN201610879720.9A patent/CN107068601B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| TW201727798A (zh) | 2017-08-01 |
| CN107068601A (zh) | 2017-08-18 |
| US10515834B2 (en) | 2019-12-24 |
| US20170125272A1 (en) | 2017-05-04 |
| KR20170054226A (ko) | 2017-05-17 |
| JP2017108112A (ja) | 2017-06-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107068601B (zh) | 包括水平槽和/或移动喷头的晶片输送微气候技术和装置 | |
| JP6740394B2 (ja) | 基板搬送部 | |
| US12040199B2 (en) | Substrate processing apparatus for processing substrates | |
| KR101518103B1 (ko) | 덮개 개폐 장치 | |
| JP2020077871A (ja) | 基材を処理するための基材処理装置 | |
| KR20170012031A (ko) | 로드 로크 장치 및 기판 처리 시스템 | |
| JP2008078616A (ja) | カセット蓄積量を増加させた処理装置 | |
| WO2017154639A1 (ja) | 基板処理装置 | |
| US10319621B2 (en) | Semiconductor processing assembly and facility | |
| SG186713A1 (en) | Treatment device for transport and storage boxes | |
| KR102626528B1 (ko) | 국소 퍼지 기능을 갖는 반송 장치 | |
| JP6706935B2 (ja) | 基板処理装置 | |
| JPH10256346A (ja) | カセット搬出入機構及び半導体製造装置 | |
| JP2024023874A (ja) | 基板処理装置及び基板収納容器保管方法 | |
| WO2000062332A1 (en) | ARRANGEMENT FOR STORING OBJECTS, PARTICULARLY FOR STORING DISKLIKE OBJECTS SUCH AS WAFERS, FLAT PANELS OR CDs | |
| US5857848A (en) | Transfer apparatus and vertical heat-processing system using the same | |
| JP5279576B2 (ja) | 基板処理装置 | |
| JP2018093087A (ja) | 基板処理装置 | |
| KR980009066A (ko) | 반도체 기판 캐리어 이송 및 사용 방법 및 장치 | |
| US20020153578A1 (en) | Wafer buffering system | |
| KR102278078B1 (ko) | 기판 반송 장치 및 기판 처리 장치 | |
| KR20100113625A (ko) | 베어 스토커용 자동 취급 버퍼 | |
| CN117337483A (zh) | 具有冗余度的工厂接口 | |
| TW202327975A (zh) | 存儲系統 | |
| KR20200098109A (ko) | 반도체 웨이퍼 보관상자 운반 처리 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |