JP2009543355A - 進歩型フロントエンド処理のためのクラスターツール - Google Patents
進歩型フロントエンド処理のためのクラスターツール Download PDFInfo
- Publication number
- JP2009543355A JP2009543355A JP2009518542A JP2009518542A JP2009543355A JP 2009543355 A JP2009543355 A JP 2009543355A JP 2009518542 A JP2009518542 A JP 2009518542A JP 2009518542 A JP2009518542 A JP 2009518542A JP 2009543355 A JP2009543355 A JP 2009543355A
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- chamber
- processing
- support
- region
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

















Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67745—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber characterized by movements or sequence of movements of transfer devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B7/00—Cleaning by methods not provided for in a single other subclass or a single group in this subclass
- B08B7/0035—Cleaning by methods not provided for in a single other subclass or a single group in this subclass by radiant energy, e.g. UV, laser, light beam or the like
- B08B7/0057—Cleaning by methods not provided for in a single other subclass or a single group in this subclass by radiant energy, e.g. UV, laser, light beam or the like by ultraviolet radiation
-
- C—CHEMISTRY; METALLURGY
- C23—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; CHEMICAL SURFACE TREATMENT; DIFFUSION TREATMENT OF METALLIC MATERIAL; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL; INHIBITING CORROSION OF METALLIC MATERIAL OR INCRUSTATION IN GENERAL
- C23C—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; SURFACE TREATMENT OF METALLIC MATERIAL BY DIFFUSION INTO THE SURFACE, BY CHEMICAL CONVERSION OR SUBSTITUTION; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL
- C23C16/00—Chemical coating by decomposition of gaseous compounds, without leaving reaction products of surface material in the coating, i.e. chemical vapour deposition [CVD] processes
- C23C16/44—Chemical coating by decomposition of gaseous compounds, without leaving reaction products of surface material in the coating, i.e. chemical vapour deposition [CVD] processes characterised by the method of coating
- C23C16/54—Apparatus specially adapted for continuous coating
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
- H01L21/04—Manufacture or treatment of semiconductor devices or of parts thereof the devices having at least one potential-jump barrier or surface barrier, e.g. PN junction, depletion layer or carrier concentration layer
- H01L21/18—Manufacture or treatment of semiconductor devices or of parts thereof the devices having at least one potential-jump barrier or surface barrier, e.g. PN junction, depletion layer or carrier concentration layer the devices having semiconductor bodies comprising elements of Group IV of the Periodic System or AIIIBV compounds with or without impurities, e.g. doping materials
- H01L21/30—Treatment of semiconductor bodies using processes or apparatus not provided for in groups H01L21/20 - H01L21/26
- H01L21/302—Treatment of semiconductor bodies using processes or apparatus not provided for in groups H01L21/20 - H01L21/26 to change their surface-physical characteristics or shape, e.g. etching, polishing, cutting
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67098—Apparatus for thermal treatment
- H01L21/67115—Apparatus for thermal treatment mainly by radiation
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67155—Apparatus for manufacturing or treating in a plurality of work-stations
- H01L21/6719—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the construction of the processing chambers, e.g. modular processing chambers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67155—Apparatus for manufacturing or treating in a plurality of work-stations
- H01L21/67196—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the construction of the transfer chamber
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67242—Apparatus for monitoring, sorting or marking
- H01L21/67253—Process monitoring, e.g. flow or thickness monitoring
Abstract
【選択図】 図15
Description
[0001]本発明の実施形態は、一般に、基板処理モジュール、基板準備チャンバ、及び/又はプロセス検証及び分析チャンバを含む処理シーケンスを遂行するように構成された一体型処理システムに関する。
[0002]半導体装置を形成するプロセスは、通常、制御された処理環境で基板(例えば、半導体ウェハ)を処理する能力を有する複数のチャンバ処理システム(例えば、クラスターツール)で行われる。典型的な制御された処理環境は、メインフレームを有するシステムを含み、メインフレームは、これに接続された複数の真空処理チャンバとロードロックとの間で基板を搬送する基板移送ロボットを収容している。制御された処理環境は、基板移送中及び種々の基板処理ステップの実行中に基板表面の汚染を最小にすることを含む多数の利益を有する。従って、制御された環境内での処理により、発生する欠陥の数が減少されると共に、装置の歩留りが改善される。
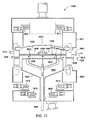
[0039]一実施形態では、クラスターツール100は、システムコントローラ102と、複数の基板処理チャンバ201−204と、1つ以上の支援チャンバ211とを備えている。一般的に、支援チャンバは、計測チャンバ、前処理チャンバ、又は後処理チャンバでよい。支援チャンバの追加は、これに限定されないが、装置の歩留まりの改善、基板から基板へのプロセス反復性の改善、プロセス結果の分析、及び基板と基板との間のキュータイム差の影響の減少を含む多数の理由で、クラスターツール100に加えることができる。
[0044]一実施形態において、支援チャンバ211は、準備/分析ステップ302及び/又は後処理/分析ステップ310の間に基板の表面上の粒子の数又は汚染物の量を減少し、望ましい処理シーケンスを使用して形成される装置に対して装置の歩留り及び基板の廃棄を改善できるように構成される。一般に、粒子/汚染物減少チャンバ、以下、粒子減少チャンバという、は、基板の1つ以上の表面を紫外線(UV)放射に露出して、基板の表面上の粒子及び他の汚染物に充分なエネルギーを与え、それらを基板の表面から離れるように移動させ(例えば、ブラウン運動)、露出表面に対する汚染物結合特性を変化させ、又は汚染物を蒸発させる。動作中に、波長が約120から約430ナノメートル(nm)で、電力密度が約5から約25ミリワット/cm2のUV放射又はUV光を、粒子/汚染物減少チャンバ内に収容された放射源から基板の表面へ配送することができる。放射源からの放射は、キセノン、アルゴン、クリプトン、窒素、塩化キセノン、フッ化クリプトン、フッ化アルゴンのような元素を含むランプにより供給することができる。UV光を放出する放射源の使用は、基板表面に見られる有機汚染物の有害な影響を除去又は減少するのに特に有用なことがある。UV波長を放出するように適応される典型的な放射源は、従来のUVランプ(例えば、水銀蒸気ランプ)又は他の同様の装置でよい。異なる波長のUV光を放出するUV放出放射源の組合せも使用できる。
[0047]一実施形態において、支援チャンバ211は、準備/分析ステップ302及び/又は後処理/分析ステップ310を遂行して、処理シーケンスにおける処理ステップの前又は後に基板の特性を分析するように適応される計測チャンバである。一般に、計測チャンバで測定することのできる基板の特性は、これに限定されないが、基板の表面上に堆積された1つ以上の層の固有応力又は外的応力、1つ以上の堆積された層の膜組成、基板の表面上の粒子の数、及び基板の表面上に見られる1つ以上の層の厚みの測定を含むことができる。計測チャンバから収集されたデータは、次いで、システムコントローラ102により、1つ以上の処理ステップにおける1つ以上のプロセス変数を調整して、その後に処理される基板上に有利な処理結果を生じさせるのに使用される。基板の表面上に見られる粒子を測定し分析するように適応できる計測チャンバのハードウェア及び制御アルゴリズムは、例えば、参考としてここに全体を援用する共通に譲渡された米国特許第6,630,995号、第6,654,698号、第6,952,491号、及び第6,693,708号に見ることができる。
[0048]一実施形態では、支援チャンバ211は、従来の光学的測定技術の使用により基板表面上の堆積膜の組成及び厚みを測定するように適応される計測チャンバである。典型的な組成及び厚み測定技術は、従来のエリプソメトリー、反射計測、又はX線光電子分光(XPS)技術を含む。これらの技術を使用して基板表面上の希望の領域で測定された組成及び厚みの結果は、次いで、システムコントローラ102へフィードバックされ、処理シーケンスにおける上流又は下流プロセスステップの1つ以上に対して調整を行うことができる。
[0054]別の実施形態では、支援チャンバ211は、従来の基板バウ測定技術の使用により基板表面上の堆積膜内に含まれる応力又は歪を測定するように適応される。一般的に、1つのパラメータ(例えば、応力又は歪)を測定し、測定領域内に含まれる材料の形式及び/又は1つ以上の材料特性を測定し又は知ることにより、基板の領域内に含まれる応力及び歪を計算することができる。プロセスシーケンス中に基板のバウ又はバウの変化を測定する従来の応力又は歪測定ツールは、処理シーケンスにおける1つ以上の処理ステップを遂行した後に基板の応力又は歪を測定し、次いで、その結果をシステムコントローラ102へフィードバックして、処理シーケンスにおける1つ以上のプロセスステップにどんなアクションをとる必要があるかシステムコントローラ102が判断できるように構成される。基板の応力を測定するように適応できる従来の応力測定ツールは、KLA−テンコル(Tencor)社、ナノメトリック社、又はサーマ・ウェーブ(Therma-Wave)社から入手することができる。
[0056]一実施形態では、クラスターツール100に一体化された計測チャンバは、X線回折(XRD)技術を利用して、膜の厚み、膜の組成、膜の応力又は歪を測定する。典型的なXRD技術は、基板表面上の1つ以上の領域を、放出されたX線放射に露出したときに発生される回折パターンを分析し解釈する上で助けとなるように、ブラッグの法則を利用する。一般的に、XRDチャンバは、X線源、1つ以上の放射検出器、基板支持体、及びアクチュエータを含み、このアクチュエータは、X線源を基板に対して関節運動させるか又は基板支持体をX線源に対して関節運動させて、回折パターンを発生し分析できるようにする。XRD型の計測チャンバから得られた結果を使用して、プロセスシーケンスの処理ステップの1つ以上を遂行する前又は後に基板表面上の膜(1つ又は複数)の種々の特性を測定することができる。システムコントローラ102の使用により、XRDチャンバから受け取った結果を使用して、種々のプロセスステップにおけるプロセス変数を調整し、処理シーケンスから得られる結果を改善することができる。一実施例では、以前の堆積処理ステップで形成されたEPI層の応力の測定が望まれることがあった。それ故、システムコントローラ102の使用により、XRD結果を使用して、EPIプロセス変数(例えば、RF電力、処理圧力、膜厚み、堆積率)の1つ以上を調整し、処理結果を改善することができる。処理シーケンスの異なる段階で複数の異なる膜特性(例えば、応力、膜の組成、厚み)を特徴付ける能力を有する計測チャンバ、例えば、XRDチャンバは、個別の計測チャンバを使用して分析を遂行する構成に対して、システムのコストを削減し、システムの占有面積を減少し、クラスターツールの信頼性を改善し、且つチャンバ間で基板を移送するのに必要なオーバーヘッド時間を短縮するのに有用である。
[0058]図8は、計測プロセス、前処理プロセスステップ、又は後処理プロセスステップを遂行するように適応できる支援チャンバ211内に収容される支援チャンバアッセンブリ800を含む移送チャンバ110の側部断面図である。一実施形態では、図8に示すように、支援チャンバアッセンブリ800は、準備/分析ステップ302及び/又は後処理/分析ステップ310の間に基板表面上の粒子の数を減少するように構成される。支援チャンバアッセンブリ800は、一般的に、上述した粒子減少チャンバ700に見られる全てのコンポーネントを含むが、エンクロージャー701のコンポーネント、例えば、チャンバ本体702及びチャンバ蓋703は、各々、移送チャンバベース110B及び移送チャンバ蓋110Aに置き換えられる。
[0065]一実施形態では、クラスターツール100は、基板の表面をその後の装置製造プロセスステップのために準備する1つ以上の前クリーニングステップを遂行するように適応される準備チャンバを含む。前クリーニングステップは、一般的に、処理ステップと処理ステップとの間の時間長さ又はキュータイムが重大であるか、或いは大気又は他の汚染源への露出長さが、製造される装置の歩留り、製造される装置の反復性、及び全装置性能に影響するような半導体装置の製造段階において重要である。一実施例において、典型的に、カセット、FOUP、又は他の基板取り扱いコンポーネントからガス放出する有機型汚染物への時間従属露出のために基板の表面に見られる汚染量によりキュータイムの問題が生じる。別の実施例では、1つ以上の接触レベル特徴部を形成する前に形成され、従って、バッチ内の異なる基板の形成される装置の性能に影響を及ぼす自然酸化物の成長によりキュータイムの問題が生じる。形成される半導体装置に対する自然酸化物の成長の有害な影響を減少するために、次の処理ステップ、例えば、金属酸化物半導体(MOS)装置のゲート酸化物形成ステップを遂行する直前に自然酸化物層が除去される。従って、この準備ステップを遂行することで、クラスターツールで処理される各基板は、クラスターツールで基板を処理する前に同じスタート点でスタートし、従って、プロセス結果の再現性をより良いものにする。従って、この準備ステップは、バッチにおける最初の基板と最後の基板との間の大気汚染露出時間差、及び基板のあるバッチと基板の別のバッチとの間の差の影響を効果的に除去する。
[0068]一実施形態において、図13に示す処理シーケンス301Aにおける準備/分析ステップ302Bは、プラズマ補助型の前クリーニング処理ステップを使用して、このステップの前に基板の表面上に形成された自然酸化物層及び他の汚染物を除去する。基板の表面に自然酸化物層及び他の汚染物が存在すると、装置の歩留り及びプロセスの再現性の結果に著しく影響するので、1つ以上の前クリーニングステップを基板において遂行することができる。
[0091]別の実施形態では、露出した基板表面に見られる自然酸化物層及び他の汚染物は、処理シーケンスにおける1つ以上の基板装置製造プロセスステップを遂行する前に、湿式クリーニング型前クリーニングプロセス、以下、湿式クリーニングプロセスという、を使用して除去される。図14は、1つ以上の湿式クリーニング型前クリーニングプロセスステップを遂行することにより装置の歩留り及びプロセスの再現性を改善するのに使用できるプロセスシーケンス301Bを示す。
[0099]半導体装置のサイズが、例えば、45nmノード又はそれ以下というように縮小するにつれて、自然酸化物の成長及び/又は有機汚染物への露出により生じるキュータイムの影響が、より大きな問題となる。形成された半導体装置に対する自然酸化物の成長又は汚染の有害な影響を減少するために、堆積ステップを遂行する前に1つ以上のクリーニングプロセスを遂行して、基板の表面が希望の清潔さレベルとなるよう保証することができる。クラスターツールの一実施形態では、1つ以上の処理チャンバ201−204又は支援チャンバ211は、1つ以上の波長のUV光を配送して基板の表面をクリーニングするように適応される放射源を含み、キュータイムの影響を減少し、ひいては、CVD、PVD又はALD型プロセスのようなその後の堆積プロセスに対して基板を準備する。この構成では、クラスターツール内で基板に対して遂行される処理ステップのシーケンスは、UVエネルギー源を使用して基板表面をクリーニングするステップ(以下、UVクリーニングプロセスという)を含む。堆積ステップの前にUVクリーニングプロセスを追加することは、エピタキシャル(EPI)層堆積ステップの直前にそれを遂行するときには特に有用である。というのは、堆積されるEPI層の核生成、及び形成されるEPI層の応力が、プロセスの開始における表面の状態に非常に敏感だからである。一実施形態では、基板処理シーケンスは、基板の表面の清潔さを向上させると共に、EPI、CVD、PVD又はALD堆積プロセスのような基板製造ステップを遂行する直前に基板表面の状態を繰り返し制御できるように、準備ステップ、例えば、湿式クリーニング型基板準備ステップ(図14の準備/分析ステップ302C)、又は前クリーニング処理ステップ(図13の準備/分析ステップ302B)、及びUVクリーニングプロセスステップを含む。従って、湿式クリーニング型基板準備ステップ又は前クリーニング処理ステップのような準備ステップは、基板表面上の大きな汚染物又は自然酸化物層を除去するのに使用できる一方、UVクリーニングプロセスは、その後の基板処理ステップを実行する直前に基板表面を最終的に準備及び/又は不動態化するのに使用される。
[00108]一実施形態では、基板処理チャンバは、基板処理ステップ(例えば、図13、14及び16の基板処理ステップ304−306)の間に基板処理温度を下げるように適応されるUV放射源を含む。基板処理温度を下げる必要性は、特徴部サイズが45nm以下に減少されるにつれて益々重要になってきた。処理温度を下げる必要性は、形成される装置の層間の材料の相互拡散性により生じる装置の歩留まりの問題を最小にするか又は回避する必要性によって生み出される。低いプロセス温度は、基板準備ステップ及び基板製造ステップの両方について必要とされる。基板処理温度を下げると、形成される装置の熱履歴を改善し、ひいては、装置の歩留り、及び形成される装置の使用寿命を改善する。従って、装置製造処理シーケンス内に低い処理温度を含む1つ以上のプロセスステップを使用することが望まれる。
Claims (35)
- ロボットが配設された移送領域を形成する1つ以上の壁と、
上記移送領域内に配設され、基板の表面の特性を測定するように適応される第1の支援チャンバと、
上記移送領域に連通する基板処理チャンバと、
上記基板処理チャンバ内で処理ステップを遂行する前に基板の表面を準備するように適応される前クリーニングチャンバと、
を備えた基板処理装置。 - 上記移送領域は、約10−6トールから約700トールの圧力に維持される、請求項1に記載の装置。
- 上記第1の支援チャンバは、XRD、XPS、反射計、又はエリプソメーター技術を使用して基板の表面の特性を測定するように適応される、請求項1に記載の装置。
- 上記基板処理チャンバは、デカップル型プラズマ窒化物(DPN)チャンバ、急速熱処理(RTP)チャンバ、化学的気相堆積(CVD)チャンバ、原子層堆積(ALD)チャンバ、又は物理的気相堆積(PVD)チャンバである、請求項1に記載の装置。
- 基板の表面から汚染物を除去するように適応される第2の支援チャンバを更に備え、上記1つ以上の壁に配設された放射源から基板の表面へ紫外線(UV)放射を配送することにより汚染物を除去する、請求項1に記載の装置。
- 上記第1の支援チャンバ内で測定される基板の表面の特性は、上記領域内に含まれた材料の応力、歪、厚み及び組成より成るグループから選択された特性である、請求項1に記載の装置。
- ロボットが配設された移送領域を形成する1つ以上の壁と、
上記移送領域に連通する1つ以上の基板処理チャンバと、
上記ロボットと移送可能に連通し、基板の表面の特性を測定するように適応される支援チャンバと、
上記移送領域に連通する処理チャンバであって、
この処理チャンバの処理領域内に位置付けられた基板支持体、及び
上記基板支持体に位置付けられた基板の表面に1つ以上のUV波長の光を配送するように適応される第1の放射源、
を含むような前記処理チャンバと、
を備えた基板処理装置。 - 上記移送領域は、約10−6トールから約700トールの圧力に維持される、請求項7に記載の装置。
- 上記1つ以上の基板処理チャンバは、デカップル型プラズマ窒化物(DPN)チャンバ、急速熱処理(RTP)チャンバ、化学的気相堆積(CVD)チャンバ又は原子層堆積(ALD)チャンバである、請求項7に記載の装置。
- 上記支援チャンバは、XRD、XPS、反射計、又はエリプソメーター技術を使用して基板の表面の特性を測定するように適応される、請求項7に記載の装置。
- 基板の表面から汚染物を除去するように適応される第2の支援チャンバを更に備え、上記1つ以上の壁の少なくとも1つに接続された第2の放射源から基板の表面へ紫外線(UV)放射を配送することにより汚染物を除去する、請求項7に記載の装置。
- 上記第1の放射源は、約120nmから約430nmの範囲の1つ以上の波長の光を、約1から約25mW/cm2の電力密度で配送するように適応される、請求項7に記載の装置。
- 上記処理チャンバは、更に、上記処理領域にクリーニングガスを配送するように適応されるガス源を備え、上記クリーニングガスは、水素を含む、請求項7に記載の装置。
- 2つ以上の基板を含むように適応されるポッドと、
上記ロボットと連通し、大気圧より低い圧力に排気されるように適応されるロードロックと、
上記ポッドに位置付けられた2つ以上の基板の1つを上記ポッドと上記ロードロックとの間で移送するように適応される第2のロボットと、
を更に備えた請求項7に記載の装置。 - 上記支援チャンバ内で測定される基板の表面の特性は、上記領域内に含まれた材料の応力、歪、厚み及び組成より成るグループから選択された特性である、請求項7に記載の装置。
- ロボットが配設された移送領域を形成する1つ以上の壁と、
上記ロボットと移送可能に連通し、基板の表面の特性を測定するように適応される支援チャンバと、
上記移送領域に連通する第1の処理チャンバであって、
この処理チャンバの処理領域内に位置付けられた基板支持体、及び
1つ以上のUV波長の光を、上記基板支持体に位置付けられた基板の表面に配送するように適応される第1の放射源、
を含むような前記第1の処理チャンバと、
上記移送領域に連通する第2の処理チャンバであって、
この処理チャンバの処理領域内に位置付けられた基板支持体、
1つ以上のUV波長の光を、上記基板支持体に位置付けられた基板の表面に配送するように適応される第2の放射源、及び
水素を含むクリーニングガスを上記処理領域へ配送するように適応されるガス源、
を含むような第2の処理チャンバと、
を備えた基板処理装置。 - 上記移送領域は、約10−6トールから約700トールの圧力に維持される、請求項16に記載の装置。
- 上記第1の処理チャンバは、デカップル型プラズマ窒化物(DPN)チャンバ、急速熱処理(RTP)チャンバ、化学的気相堆積(CVD)チャンバ、又は原子層堆積(ALD)チャンバである、請求項16に記載の装置。
- 上記支援チャンバは、XRD、XPS、反射計、又はエリプソメーター技術を使用して基板の表面の特性を測定するように適応される、請求項16に記載の装置。
- 基板の表面から汚染物を除去するように適応される第2の支援チャンバを更に備え、上記1つ以上の壁の少なくとも1つに接続された第2の放射源から基板の表面へ紫外線(UV)放射を配送することにより汚染物を除去する、請求項16に記載の装置。
- 上記第1及び第2の放射源は、約120nmから約430nmの範囲の1つ以上の波長の光を、約1から約25mW/cm2の電力密度で配送するように適応される、請求項16に記載の装置。
- 上記支援チャンバ内で測定される基板の表面の特性は、上記領域内に含まれた材料の応力、歪、厚み及び組成より成るグループから選択された特性である、請求項16に記載の装置。
- クラスターツール内で半導体装置を形成する方法において、
基板処理チャンバ内で基板の表面を変更するステップと、
基板の表面を変更した後に基板の領域の特性を測定するステップと、
上記測定された特性を、システムコントローラに記憶された値と比較するステップと、
基板の表面を変更するプロセスの間に、上記測定された特性とシステムコントローラに記憶された値との上記比較に基づいて、プロセス変数を変更するステップと、
を備えた方法。 - 領域の特性を測定する上記ステップは、上記領域内に含まれた材料の応力、歪、厚み及び組成より成るグループから選択された特性を測定することを含む、請求項23に記載の方法。
- 基板の表面を変更する前に基板の表面を前クリーニングするステップを更に備えた、請求項23に記載の方法。
- 装置の特徴部を形成する前に基板の表面から汚染物を除去するステップを更に備え、この汚染物を除去するステップは、
約120nmから約430nmの範囲内の少なくとも1つの波長を有する放射に基板の表面を露出させる段階と、
水素を含むクリーニングガスを基板の表面に与える段階と、
約750℃より低い温度に基板を加熱する段階と、
を含む請求項23に記載の方法。 - 基板の表面を変更する上記ステップは、デカップル型プラズマ窒化物(DPN)プロセス、エピタキシャル層(EPI)堆積プロセス、急速熱処理(RTP)プロセス、化学的気相堆積(CVD)プロセス、原子層堆積(ALD)プロセス、及び物理的気相堆積(PVD)プロセスより成るグループから選択されたプロセスを遂行することを含む、請求項23に記載の方法。
- 基板の表面を変更する上記ステップは、更に、この表面を変更する処理ステップ中に約120nmから約430nmの範囲内の少なくとも1つの波長を有する放射に基板の表面を露出させることを含む、請求項27に記載の方法。
- クラスターツール内で半導体装置を形成する方法において、
基板処理チャンバ内で基板の表面を変更するステップと、
上記クラスターツールの移送領域内に配設されたロボットを使用して、その移送領域に基板を位置付けるステップと、
上記移送領域に位置付けられた基板の表面の特性を測定するステップと、
上記測定された特性を、システムコントローラに記憶された値と比較するステップと、
基板の表面を変更するプロセスにおいて、上記測定された特性とシステムコントローラに記憶された値との上記比較に基づいて、プロセス変数を変更するステップと、
を備えた方法。 - 装置の特徴部を形成する前に基板の表面を前クリーニングするステップを更に備えた、請求項29に記載の方法。
- 領域の特性を測定する上記ステップは、上記領域内に含まれた材料の応力、歪、厚み及び組成より成るグループから選択された特性を測定することを含む、請求項29に記載の方法。
- 放射源からの紫外線(UV)放射に基板の表面を露出させることにより、装置の特徴部を形成する前に、基板の表面から汚染物を除去するステップを更に備えた、請求項29に記載の方法。
- 基板の表面を変更する上記ステップは、デカップル型プラズマ窒化物(DPN)プロセス、エピタキシャル層(EPI)堆積プロセス、急速熱処理(RTP)プロセス、化学的気相堆積(CVD)プロセス、原子層堆積(ALD)プロセス、及び物理的気相堆積(PVD)プロセスより成るグループから選択されたプロセスを遂行することを含む、請求項29に記載の方法。
- 装置の特徴部を形成する前に基板の表面から汚染物を除去するステップを更に備え、この汚染物を除去するステップは、
約120nmから約430nmの範囲内の少なくとも1つの波長を有する放射に基板の表面を露出させる段階と、
水素を含むクリーニングガスを基板の表面に与える段階と、
約750℃より低い温度に基板を加熱する段階と、
を含む請求項29に記載の方法。 - 基板の表面を変更する上記ステップは、更に、この表面を変更する処理ステップ中に約120nmから約430nmの範囲内の少なくとも1つの波長を有する放射に基板の表面を露出させることを含む、請求項29に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US80651806P | 2006-07-03 | 2006-07-03 | |
| US11/460,864 US20070134821A1 (en) | 2004-11-22 | 2006-07-28 | Cluster tool for advanced front-end processing |
| PCT/US2007/072264 WO2008005773A2 (en) | 2006-07-03 | 2007-06-27 | Cluster tool for advanced front-end processing |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009543355A true JP2009543355A (ja) | 2009-12-03 |
| JP2009543355A5 JP2009543355A5 (ja) | 2010-08-05 |
Family
ID=38895329
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009518542A Pending JP2009543355A (ja) | 2006-07-03 | 2007-06-27 | 進歩型フロントエンド処理のためのクラスターツール |
Country Status (5)
| Country | Link |
|---|---|
| EP (1) | EP2041774A2 (ja) |
| JP (1) | JP2009543355A (ja) |
| KR (1) | KR20090035578A (ja) |
| TW (1) | TW200811916A (ja) |
| WO (1) | WO2008005773A2 (ja) |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013514673A (ja) * | 2009-12-17 | 2013-04-25 | アプライド マテリアルズ インコーポレイテッド | Nmosエピ層の形成方法 |
| JP2013543651A (ja) * | 2010-09-14 | 2013-12-05 | アプライド マテリアルズ インコーポレイテッド | デバイス歩留まり向上のための移送チャンバ計量 |
| JP2016072625A (ja) * | 2014-09-30 | 2016-05-09 | ラム リサーチ コーポレーションLam Research Corporation | プラズマ援用原子層堆積におけるrf補償のための方法及び装置 |
| KR20160126914A (ko) * | 2015-04-23 | 2016-11-02 | 어플라이드 머티어리얼스, 인코포레이티드 | 반도체 프로세싱 시스템에서의 외부 기판 회전 |
| JP2018527456A (ja) * | 2015-06-19 | 2018-09-20 | アプライド マテリアルズ インコーポレイテッドApplied Materials,Incorporated | 多層金属誘電体膜のpvd堆積とアニール |
| JP2019501518A (ja) * | 2015-11-13 | 2019-01-17 | アプライド マテリアルズ インコーポレイテッドApplied Materials, Inc. | 半導体デバイスの処理方法並びに半導体デバイスの処理システムおよび装置 |
| US10697059B2 (en) | 2017-09-15 | 2020-06-30 | Lam Research Corporation | Thickness compensation by modulation of number of deposition cycles as a function of chamber accumulation for wafer to wafer film thickness matching |
| JP2020123675A (ja) * | 2019-01-30 | 2020-08-13 | 日立金属株式会社 | 半導体製造装置の管理システム及びその方法 |
| KR20200124315A (ko) * | 2018-03-20 | 2020-11-02 | 도쿄엘렉트론가부시키가이샤 | 통합형 반도체 공정 모듈을 포함하는 자기 인식 및 보정 이종 플랫폼, 및 이를 사용하기 위한 방법 |
| JP2021518674A (ja) * | 2018-03-20 | 2021-08-02 | 東京エレクトロン株式会社 | 統合的な半導体処理モジュールを組み込んだ自己認識及び補正異種プラットフォーム及びその使用方法 |
| JP2021518673A (ja) * | 2018-03-20 | 2021-08-02 | 東京エレクトロン株式会社 | 統合的な計測を伴う基板処理ツール並びに使用方法 |
| JP2021168422A (ja) * | 2017-09-20 | 2021-10-21 | 株式会社Kokusai Electric | 基板処理装置、半導体装置の製造方法及びプログラム |
| US20220102193A1 (en) * | 2020-09-25 | 2022-03-31 | SK Hynix Inc. | Semiconductor device and method for fabricating the same |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8022372B2 (en) | 2008-02-15 | 2011-09-20 | Veeco Instruments Inc. | Apparatus and method for batch non-contact material characterization |
| US7838431B2 (en) * | 2008-06-14 | 2010-11-23 | Applied Materials, Inc. | Method for surface treatment of semiconductor substrates |
| US7964858B2 (en) | 2008-10-21 | 2011-06-21 | Applied Materials, Inc. | Ultraviolet reflector with coolant gas holes and method |
| WO2011019215A2 (ko) * | 2009-08-13 | 2011-02-17 | Kim Nam Jin | 레이어 형성장치 |
| US8958061B2 (en) | 2011-05-31 | 2015-02-17 | Veeco Instruments Inc. | Heated wafer carrier profiling |
| WO2014008162A1 (en) * | 2012-07-02 | 2014-01-09 | Applied Materials, Inc. | Aluminum-nitride buffer and active layers by physical vapor deposition |
| CN104584188B (zh) * | 2012-08-08 | 2017-05-31 | 应用材料公司 | 连结型真空处理工具和使用该工具的方法 |
| KR101463984B1 (ko) * | 2013-02-15 | 2014-11-26 | 최대규 | 플라즈마 처리 시스템 |
| US9627608B2 (en) * | 2014-09-11 | 2017-04-18 | Lam Research Corporation | Dielectric repair for emerging memory devices |
| US20160240405A1 (en) * | 2015-02-12 | 2016-08-18 | Applied Materials, Inc. | Stand alone anneal system for semiconductor wafers |
| JP6441499B2 (ja) * | 2015-10-28 | 2018-12-19 | 東京エレクトロン株式会社 | 基板処理方法、基板処理装置、基板処理システム及び記憶媒体 |
| US20180076065A1 (en) | 2016-09-15 | 2018-03-15 | Applied Materials, Inc. | Integrated system for semiconductor process |
| TWI700750B (zh) * | 2017-01-24 | 2020-08-01 | 美商應用材料股份有限公司 | 用於介電薄膜的選擇性沉積之方法及設備 |
| JP7158133B2 (ja) * | 2017-03-03 | 2022-10-21 | アプライド マテリアルズ インコーポレイテッド | 雰囲気が制御された移送モジュール及び処理システム |
| WO2018197008A1 (en) | 2017-04-28 | 2018-11-01 | Applied Materials, Inc. | Method for cleaning a vacuum system used in the manufacture of oled devices, method for vacuum deposition on a substrate to manufacture oled devices, and apparatus for vacuum deposition on a substrate to manufacture oled devices |
| WO2019222320A1 (en) * | 2018-05-16 | 2019-11-21 | Applied Materials, Inc. | Atomic layer self aligned substrate processing and integrated toolset |
| US20190362989A1 (en) * | 2018-05-25 | 2019-11-28 | Applied Materials, Inc. | Substrate manufacturing apparatus and methods with factory interface chamber heating |
| CN111507076B (zh) * | 2019-01-29 | 2022-07-05 | 北京新唐思创教育科技有限公司 | 一种用于教学系统的共案课件制作方法、装置和终端 |
| WO2022186775A1 (en) * | 2021-03-02 | 2022-09-09 | Agency For Science, Technology And Research | A preparation chamber for cleaning and repair sapphire surface for the epitaxial growth of compound materials |
| US20230032146A1 (en) * | 2021-07-27 | 2023-02-02 | Applied Materials, Inc. | Simultaneous in process metrology for cluster tool architecture |
| KR102424853B1 (ko) * | 2021-10-12 | 2022-07-25 | 주식회사 바코솔루션 | 반도체 기판 처리 장치 |
| KR102418534B1 (ko) * | 2021-10-12 | 2022-07-07 | 주식회사 바코솔루션 | 반도체 기판의 처리를 위한 클러스터 툴 및 그 제어 방법 |
| KR102418530B1 (ko) * | 2021-10-12 | 2022-07-07 | 주식회사 바코솔루션 | 반도체 기판 처리 장치 |
| CN114000192B (zh) * | 2021-10-29 | 2023-10-13 | 北京北方华创微电子装备有限公司 | 半导体工艺设备以及晶圆位置状态的监测方法 |
| CN114904822B (zh) * | 2022-03-31 | 2023-09-26 | 上海果纳半导体技术有限公司 | 机械手清洗装置、清洗方法及半导体设备 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0249428A (ja) * | 1988-05-12 | 1990-02-19 | Mitsubishi Electric Corp | 半導体基板表面に薄膜を形成する方法およびその装置 |
| JPH05102502A (ja) * | 1991-10-09 | 1993-04-23 | Mitsui Toatsu Chem Inc | 非晶質太陽電池 |
| JPH05275343A (ja) * | 1992-03-27 | 1993-10-22 | Toshiba Corp | 基板処理装置 |
| JPH09186108A (ja) * | 1995-12-27 | 1997-07-15 | Tokyo Electron Ltd | クラスタツール装置 |
| JP2002502108A (ja) * | 1997-12-08 | 2002-01-22 | クエスター テクノロジー インコーポレイテッド | 電磁放射を用いた半導体の表面変更 |
| JP2002270596A (ja) * | 2001-03-12 | 2002-09-20 | Matsushita Electric Ind Co Ltd | 半導体装置の製造装置 |
| JP2003115578A (ja) * | 2001-10-05 | 2003-04-18 | Canon Inc | 不揮発固体磁気メモリ装置、該不揮発固体磁気メモリ装置の製造方法およびマルチ・チップ・パッケージ |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6081334A (en) * | 1998-04-17 | 2000-06-27 | Applied Materials, Inc | Endpoint detection for semiconductor processes |
| US7431795B2 (en) * | 2004-07-29 | 2008-10-07 | Applied Materials, Inc. | Cluster tool and method for process integration in manufacture of a gate structure of a field effect transistor |
-
2007
- 2007-06-27 WO PCT/US2007/072264 patent/WO2008005773A2/en active Application Filing
- 2007-06-27 EP EP07812383A patent/EP2041774A2/en not_active Withdrawn
- 2007-06-27 KR KR1020097002228A patent/KR20090035578A/ko not_active Application Discontinuation
- 2007-06-27 JP JP2009518542A patent/JP2009543355A/ja active Pending
- 2007-07-03 TW TW096124192A patent/TW200811916A/zh unknown
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0249428A (ja) * | 1988-05-12 | 1990-02-19 | Mitsubishi Electric Corp | 半導体基板表面に薄膜を形成する方法およびその装置 |
| JPH05102502A (ja) * | 1991-10-09 | 1993-04-23 | Mitsui Toatsu Chem Inc | 非晶質太陽電池 |
| JPH05275343A (ja) * | 1992-03-27 | 1993-10-22 | Toshiba Corp | 基板処理装置 |
| JPH09186108A (ja) * | 1995-12-27 | 1997-07-15 | Tokyo Electron Ltd | クラスタツール装置 |
| JP2002502108A (ja) * | 1997-12-08 | 2002-01-22 | クエスター テクノロジー インコーポレイテッド | 電磁放射を用いた半導体の表面変更 |
| JP2002270596A (ja) * | 2001-03-12 | 2002-09-20 | Matsushita Electric Ind Co Ltd | 半導体装置の製造装置 |
| JP2003115578A (ja) * | 2001-10-05 | 2003-04-18 | Canon Inc | 不揮発固体磁気メモリ装置、該不揮発固体磁気メモリ装置の製造方法およびマルチ・チップ・パッケージ |
Cited By (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013514673A (ja) * | 2009-12-17 | 2013-04-25 | アプライド マテリアルズ インコーポレイテッド | Nmosエピ層の形成方法 |
| JP2013543651A (ja) * | 2010-09-14 | 2013-12-05 | アプライド マテリアルズ インコーポレイテッド | デバイス歩留まり向上のための移送チャンバ計量 |
| US10103288B2 (en) | 2010-09-14 | 2018-10-16 | Applied Materials, Inc. | Transfer chamber metrology for improved device yield |
| JP2016072625A (ja) * | 2014-09-30 | 2016-05-09 | ラム リサーチ コーポレーションLam Research Corporation | プラズマ援用原子層堆積におけるrf補償のための方法及び装置 |
| KR102543643B1 (ko) * | 2015-04-23 | 2023-06-13 | 어플라이드 머티어리얼스, 인코포레이티드 | 반도체 프로세싱 시스템에서의 외부 기판 회전 |
| KR20160126914A (ko) * | 2015-04-23 | 2016-11-02 | 어플라이드 머티어리얼스, 인코포레이티드 | 반도체 프로세싱 시스템에서의 외부 기판 회전 |
| JP2017005242A (ja) * | 2015-04-23 | 2017-01-05 | アプライド マテリアルズ インコーポレイテッドApplied Materials,Incorporated | 半導体処理システムにおける外部基板回転 |
| JP2022023889A (ja) * | 2015-04-23 | 2022-02-08 | アプライド マテリアルズ インコーポレイテッド | 半導体処理システムにおける外部基板回転 |
| US11574825B2 (en) | 2015-04-23 | 2023-02-07 | Applied Materials, Inc. | External substrate system rotation in a semiconductor processing system |
| JP7350035B2 (ja) | 2015-04-23 | 2023-09-25 | アプライド マテリアルズ インコーポレイテッド | 半導体処理システムにおける外部基板回転 |
| US10879177B2 (en) | 2015-06-19 | 2020-12-29 | Applied Materials, Inc. | PVD deposition and anneal of multi-layer metal-dielectric film |
| JP2018527456A (ja) * | 2015-06-19 | 2018-09-20 | アプライド マテリアルズ インコーポレイテッドApplied Materials,Incorporated | 多層金属誘電体膜のpvd堆積とアニール |
| JP2019501518A (ja) * | 2015-11-13 | 2019-01-17 | アプライド マテリアルズ インコーポレイテッドApplied Materials, Inc. | 半導体デバイスの処理方法並びに半導体デバイスの処理システムおよび装置 |
| US10697059B2 (en) | 2017-09-15 | 2020-06-30 | Lam Research Corporation | Thickness compensation by modulation of number of deposition cycles as a function of chamber accumulation for wafer to wafer film thickness matching |
| US11286560B2 (en) | 2017-09-15 | 2022-03-29 | Lam Research Corporation | Thickness compensation by modulation of number of deposition cycles as a function of chamber accumulation for wafer to wafer film thickness matching |
| JP7162705B2 (ja) | 2017-09-20 | 2022-10-28 | 株式会社Kokusai Electric | 基板処理装置、半導体装置の製造方法及びプログラム |
| JP2021168422A (ja) * | 2017-09-20 | 2021-10-21 | 株式会社Kokusai Electric | 基板処理装置、半導体装置の製造方法及びプログラム |
| JP2021518673A (ja) * | 2018-03-20 | 2021-08-02 | 東京エレクトロン株式会社 | 統合的な計測を伴う基板処理ツール並びに使用方法 |
| JP2021518672A (ja) * | 2018-03-20 | 2021-08-02 | 東京エレクトロン株式会社 | 統合的な半導体処理モジュールを組み込んだ自己認識及び補正異種プラットフォーム及びその使用方法 |
| JP2021518674A (ja) * | 2018-03-20 | 2021-08-02 | 東京エレクトロン株式会社 | 統合的な半導体処理モジュールを組み込んだ自己認識及び補正異種プラットフォーム及びその使用方法 |
| CN112106182A (zh) * | 2018-03-20 | 2020-12-18 | 东京毅力科创株式会社 | 结合有集成半导体加工模块的自感知校正异构平台及其使用方法 |
| KR20200124315A (ko) * | 2018-03-20 | 2020-11-02 | 도쿄엘렉트론가부시키가이샤 | 통합형 반도체 공정 모듈을 포함하는 자기 인식 및 보정 이종 플랫폼, 및 이를 사용하기 위한 방법 |
| JP7295359B2 (ja) | 2018-03-20 | 2023-06-21 | 東京エレクトロン株式会社 | 統合的な計測を伴う基板処理ツール並びに使用方法 |
| JP7348440B2 (ja) | 2018-03-20 | 2023-09-21 | 東京エレクトロン株式会社 | 統合的な半導体処理モジュールを組み込んだ自己認識及び補正異種プラットフォーム及びその使用方法 |
| JP7402399B2 (ja) | 2018-03-20 | 2023-12-21 | 東京エレクトロン株式会社 | 統合的な半導体処理モジュールを組み込んだ自己認識及び補正異種プラットフォーム及びその使用方法 |
| KR102648517B1 (ko) * | 2018-03-20 | 2024-03-15 | 도쿄엘렉트론가부시키가이샤 | 통합형 반도체 공정 모듈을 포함하는 자기 인식 및 보정 이종 플랫폼, 및 이를 사용하기 위한 방법 |
| JP7206961B2 (ja) | 2019-01-30 | 2023-01-18 | 日立金属株式会社 | 半導体製造装置の管理システム及びその方法 |
| JP2020123675A (ja) * | 2019-01-30 | 2020-08-13 | 日立金属株式会社 | 半導体製造装置の管理システム及びその方法 |
| US20220102193A1 (en) * | 2020-09-25 | 2022-03-31 | SK Hynix Inc. | Semiconductor device and method for fabricating the same |
| US11929279B2 (en) * | 2020-09-25 | 2024-03-12 | SK Hynix Inc. | Semiconductor device including semiconductor liner and method for fabricating the same |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2041774A2 (en) | 2009-04-01 |
| TW200811916A (en) | 2008-03-01 |
| KR20090035578A (ko) | 2009-04-09 |
| WO2008005773A2 (en) | 2008-01-10 |
| WO2008005773A3 (en) | 2008-02-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2009543355A (ja) | 進歩型フロントエンド処理のためのクラスターツール | |
| US20070134821A1 (en) | Cluster tool for advanced front-end processing | |
| US20070196011A1 (en) | Integrated vacuum metrology for cluster tool | |
| JP4191137B2 (ja) | 基板処理装置のクリーニング方法 | |
| US7159599B2 (en) | Method and apparatus for processing a wafer | |
| US7585686B2 (en) | Method and apparatus for processing a wafer | |
| KR100697512B1 (ko) | 기판 처리 장치의 클리닝 방법 | |
| US6467491B1 (en) | Processing apparatus and processing method | |
| US11101174B2 (en) | Gap fill deposition process | |
| US20120220116A1 (en) | Dry Chemical Cleaning For Semiconductor Processing | |
| CN101484973A (zh) | 用于先进前段工艺的群集设备 | |
| KR20080037565A (ko) | 열 프로세스에 의한 에칭된 챔버로부터 할로겐 잔류물들을제거하기 위한 통합 방법 | |
| JPH08115886A (ja) | 処理装置及びドライクリーニング方法 | |
| US20100136773A1 (en) | Semiconductor Device Manufacturing Method and Substrate Processing Apparatus | |
| WO2007023639A1 (ja) | 基板処理装置,基板処理装置の基板搬送方法,プログラム,プログラムを記録した記録媒体 | |
| WO2022182641A1 (en) | Metal-based liner protection for high aspect ratio plasma etch | |
| KR102093551B1 (ko) | 티타늄 실리사이드 영역을 형성하는 방법 | |
| JP2007088401A (ja) | 基板処理装置,基板処理方法,プログラム,プログラムを記録した記録媒体 | |
| JPH0249428A (ja) | 半導体基板表面に薄膜を形成する方法およびその装置 | |
| US11548804B2 (en) | Method and apparatus for processing oxygen-containing workpiece | |
| KR101078316B1 (ko) | 막 형성 장치 및 막 형성 장치의 공정 챔버 세정 방법 | |
| JP4234135B2 (ja) | 基板処理装置のクリーニング方法 | |
| JP2009049217A (ja) | 半導体デバイスの製造方法。 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100616 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100616 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101007 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120821 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130305 |