JP2009072012A - アキシャルギャップ型回転電機 - Google Patents
アキシャルギャップ型回転電機 Download PDFInfo
- Publication number
- JP2009072012A JP2009072012A JP2007239268A JP2007239268A JP2009072012A JP 2009072012 A JP2009072012 A JP 2009072012A JP 2007239268 A JP2007239268 A JP 2007239268A JP 2007239268 A JP2007239268 A JP 2007239268A JP 2009072012 A JP2009072012 A JP 2009072012A
- Authority
- JP
- Japan
- Prior art keywords
- rotor
- gap type
- axial gap
- type rotating
- rotating electrical
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000008878 coupling Effects 0.000 claims description 10
- 238000010168 coupling process Methods 0.000 claims description 10
- 238000005859 coupling reaction Methods 0.000 claims description 10
- 238000004804 winding Methods 0.000 claims description 8
- 230000001360 synchronised effect Effects 0.000 claims description 2
- 230000010355 oscillation Effects 0.000 abstract 3
- 230000005291 magnetic effect Effects 0.000 description 9
- 230000033001 locomotion Effects 0.000 description 6
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical group [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 5
- 238000000034 method Methods 0.000 description 4
- 229910000831 Steel Inorganic materials 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000001105 regulatory effect Effects 0.000 description 3
- 230000003014 reinforcing effect Effects 0.000 description 3
- 239000010959 steel Substances 0.000 description 3
- 241000723353 Chrysanthemum Species 0.000 description 2
- 235000007516 Chrysanthemum Nutrition 0.000 description 2
- 230000004907 flux Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 230000003313 weakening effect Effects 0.000 description 2
- 229920001875 Ebonite Polymers 0.000 description 1
- 229910000576 Laminated steel Inorganic materials 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 229920001971 elastomer Polymers 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 239000003302 ferromagnetic material Substances 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 150000002739 metals Chemical class 0.000 description 1
- 239000005060 rubber Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
Images














Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/28—Means for mounting or fastening rotating magnetic parts on to, or to, the rotor structures
- H02K1/30—Means for mounting or fastening rotating magnetic parts on to, or to, the rotor structures using intermediate parts, e.g. spiders
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/12—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets
- H02K21/24—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets axially facing the armatures, e.g. hub-type cycle dynamos
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
- Permanent Magnet Type Synchronous Machine (AREA)
- Iron Core Of Rotating Electric Machines (AREA)
- Motor Or Generator Frames (AREA)
Abstract
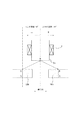
【解決手段】 ステータ1と、円盤形状のロータ6とを軸線O方向に対向配置し、前記ステータ1と前記ロータ6との間で発生する電磁力で前記ロータ6を駆動するアキシャルギャップ型の回転電機において、前記ロータ6と該ロータ6に結合する出力軸4との結合状態である接合部半径をR1からR3に変化させる。これにより、前記ロータ6が面振動により共振する固有振動数を、fR1に等しい前記ロータの回転速度から離隔して、fR3にする。
【選択図】 図4
Description
そこで従来、回転電機の共振を防止する技術として、例えば特許文献1に記載のごときものが知られている。
特許文献1に記載の回転電機は、回転電機のフレームに熱交換器を取り付ける取付剛性調整ボルトの締め付け力を調整することにより取り付け剛性を適宜に変化させて、これにより回転電機全体の固有振動数を変化させるというものである。特許文献1に記載の技術は、回転電機の据え付け剛性が工場出荷時の評価と異なっていても、共振現象を回避して静粛な運転を図るものである。
ロータ回転速度がロータ自身の固有振動数と符合した場合、ロータ自身の共振が無視し得ないほど大きくなって、回転電機の静粛な運転を妨げてしまう。
ステータと、円盤形状のロータとを軸線方向に対向配置し、前記ステータと前記ロータとの間で発生する電磁力で前記ロータを駆動するアキシャルギャップ型の回転電機において、
前記ロータと該ロータに結合する出力軸との結合状態を変化させることにより、前記ロータが面振動により共振する固有振動数を前記ロータの回転速度から離隔するよう構成したことを特徴としたものである。
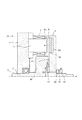
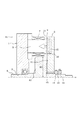
強磁性体材料からなるステータコア2は円環状であり、ステータコア2の外周縁でモータケース8に支持固定される。またステータコア1の中央部には、中心孔3を設け、出力軸4を貫通させる。この出力軸4は中心孔3に設けた軸受で回動自在に支持される。ステータコア2のうち中心孔3より外径側の部位には、複数のステータ鉄心5を周方向に等間隔となるよう配置する。積層鋼板からなるステータ鉄心5は、ステータコア2から出力軸4の軸線O方向に突出し、先端5sが拡幅してロータ6と対向する。それぞれのステータコア5の軸線O方向中程には、電機子巻線7を巻回する。
ステータ1とロータ6との間で磁気回路による電磁力が発生してロータ6が回転するが、この電磁力としてステータ1とロータ6との間には吸引力が発生する。ロータ6から見てステータ1と出力軸大径部4dとが同じ前面側にあることから、電磁力の軸線O方向成分になる吸引力が、大径部4dとロータ6との間に介在するストッパ13にスラストを与える。
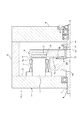
これに対しストッパ23の周縁部は、図5に示すように端面4tよりも窪んでおり、軸線Oを中心とする環状の窪み部4kを形成する。
前述した第1実施例のテーパであるストッパ13とは、前記吸引力に対するロータ固有振動数の変化特性を異ならせることができる。また、窪み部4kを具えることから、ロータ固有振動数を非連続的に変化させることができる。
前述した第1実施例のテーパであるストッパ13とも、第2実施例の曲面であるストッパ23とも異なるよう、前記吸引力に対するロータ固有振動数の変化特性を設計することができる。
通常は、相電流をIa以下にしてアキシャルギャップ型回転電機11,21,31,41を駆動運転する。また電流位相角βの極性を+側にする弱め界磁制御を行う。このため、吸引力を弱める側になる。したがって通常運転における駆動時使用領域は、図12に示すようにβ=0度の線と、電機位相角β=+90度の線と、相電流=Iaの線で包囲されたを示す。
なお、シリンダ54の油圧を低下させると、皿ばね52の押圧力によってピストン53は環状端面4tまで後退する。このようにシリンダ54の油圧を変化させることにより、接合面半径をR1またはR4に任意に変化させることができる。
2 ステータコア
4 出力軸
5 ステータ鉄心
6 回転電機のロータ
7 電機子巻線
8 モータケース
9 エアギャップ
10 ロータ永久磁石
12 バックヨーク
13 ストッパ
14 カラー
15 菊ワッシャ
16 ロックナット
23,33 ストッパ
52 皿ばね
53 ピストン
54 シリンダ
55 油圧配管
Claims (12)
- ステータと、円盤形状のロータとを軸線方向に対向配置し、前記ステータと前記ロータとの間で発生する電磁力で前記ロータを駆動するアキシャルギャップ型の回転電機において、
前記ロータと該ロータに結合する出力軸との結合状態を変化させることにより、前記ロータが面振動により共振する固有振動数を前記ロータの回転速度から離隔するよう構成したことを特徴とするアキシャルギャップ型回転電機。 - 請求項1に記載のアキシャルギャップ型回転電機において、
前記電磁力の軸線方向成分によって前記結合状態を変化させることを特徴とするアキシャルギャップ型回転電機。 - 請求項2に記載のアキシャルギャップ型回転電機において、
前記ロータと前記出力軸とが接合する接合面の半径を変化させることにより、前記結合状態を変化させることを特徴とするアキシャルギャップ型回転電機。 - 請求項3に記載のアキシャルギャップ型回転電機において、
前記接合面が、軸線方向に突出したテーパと該テーパを受け止める面の組合せであることを特徴とするアキシャルギャップ型回転電機。 - 請求項3に記載のアキシャルギャップ型回転電機において、
前記接合面が、軸線方向に突出した曲面と該曲面を受け止める面の組合せであることを特徴とするアキシャルギャップ型回転電機。 - 請求項3〜5のいずれか1項に記載のアキシャルギャップ型回転電機において、
前記接合面に前記ロータの軸線方向位置を規定するストッパを介挿し、該ストッパは前記電磁力の軸線方向成分によって変形しながら前記接合面の半径を変化させることを特徴とするアキシャルギャップ型回転電機。 - 請求項6に記載のアキシャルギャップ型回転電機において、
前記接合面は軸線方向に直角な環状であって、該環状接合面をなすロータ側部材または出力軸側部材のうち一方側部材の環状接合面内径側に前記ストッパを取り付け、
前記環状接合面外径側になる前記一方側部材の端面を前記ストッパよりも高剛性の部材で形成し、
前記ストッパを前記一方側部材の端面よりも軸線方向に突出させて他方側部材に接合し、
前記ストッパの変形により前記一方側部材の端面が他方側部材に接合することを特徴とするアキシャルギャップ型回転電機。 - 請求項1に記載のアキシャルギャップ型回転電機において、
前記ロータと前記出力軸とを相互に押圧させて接合し、
前記ロータと前記出力軸との間に前記押圧力を変化させるアクチュエータを設け、
該アクチュエータが前記ロータと前記出力軸との接合半径を変化させることにより、前
記結合状態を変化させることを特徴とするアキシャルギャップ型回転電機。 - 請求項8に記載のアキシャルギャップ型回転電機において、
前記アクチュエータは、前記ロータを軸線方向に変位させるピストン機構であることを特徴とするアキシャルギャップ型回転電機。 - 請求項9に記載のアキシャルギャップ型回転電機において、
前記ピストン機構は、前記出力軸の回転速度が所定値より大きい場合に、前記ロータと前記ステータとのエアギャップを大きくすることを特徴とするアキシャルギャップ型回転電機。 - 前記ステータに電機子巻線を設け、前記ロータに永久磁石を設け、該ロータを前記電機子巻線の界磁と同期速度で駆動する請求項2に記載のアキシャルギャップ型回転電機において、
前記電機子巻線の電流値および電流位相角によって前記電磁力の軸線方向成分を制御する手段を設けたことを特徴とするアキシャルギャップ型回転電機。 - 請求項11に記載のアキシャルギャップ型回転電機において、
前記電磁力の軸線方向成分は、前記ステータと前記ロータとの間の吸引力であって、
前記手段は、前記出力軸の目標出力トルクを達成する前記電流位相角の極性を、前記吸引力を強める側にすることを特徴とするアキシャルギャップ型回転電機。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007239268A JP5061806B2 (ja) | 2007-09-14 | 2007-09-14 | アキシャルギャップ型回転電機 |
| CN2008102153862A CN101388588B (zh) | 2007-09-14 | 2008-09-11 | 轴向间隙型电机 |
| US12/208,911 US7948132B2 (en) | 2007-09-14 | 2008-09-11 | Axial gap-type electric motor |
| KR1020080090100A KR101000188B1 (ko) | 2007-09-14 | 2008-09-12 | 액시얼 갭형 회전 전기 기기 |
| EP08164315.7A EP2037557B1 (en) | 2007-09-14 | 2008-09-15 | Axial gap-type electric motor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007239268A JP5061806B2 (ja) | 2007-09-14 | 2007-09-14 | アキシャルギャップ型回転電機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009072012A true JP2009072012A (ja) | 2009-04-02 |
| JP5061806B2 JP5061806B2 (ja) | 2012-10-31 |
Family
ID=39816779
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007239268A Expired - Fee Related JP5061806B2 (ja) | 2007-09-14 | 2007-09-14 | アキシャルギャップ型回転電機 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7948132B2 (ja) |
| EP (1) | EP2037557B1 (ja) |
| JP (1) | JP5061806B2 (ja) |
| KR (1) | KR101000188B1 (ja) |
| CN (1) | CN101388588B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102889970A (zh) * | 2012-10-22 | 2013-01-23 | 中国船舶重工集团公司第七0四研究所 | 一种实现定子和转子振动特性物理分离的试验方法 |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102299449B1 (ko) * | 2014-10-06 | 2021-09-08 | 현대모비스 주식회사 | 회전자 어셈블리 및 이를 이용한 자속모터 |
| JP6867734B2 (ja) * | 2016-08-03 | 2021-05-12 | 株式会社トプコン | 軸支持構造、レーザ光線照射ユニット及び測量装置 |
| JP6862906B2 (ja) * | 2017-02-24 | 2021-04-21 | 株式会社デンソー | シフトレンジ制御装置 |
| US11005322B2 (en) | 2017-06-05 | 2021-05-11 | E-Circuit Motors, Inc. | Rotor assemblies for axial flux machines |
| GB2583974B (en) * | 2019-05-17 | 2023-12-06 | Time To Act Ltd | Improvements to the construction of axial flux rotary generators |
| CA3159768A1 (en) * | 2019-11-12 | 2021-05-20 | E-Circuit Motors, Inc. | Improved rotor assemblies for axial flux machines |
| US11608857B2 (en) * | 2020-04-14 | 2023-03-21 | Robert Lothar Monteith | Passive magnetic bearing |
| GB2595492B (en) * | 2020-05-28 | 2022-08-17 | Yasa Ltd | A controller for an axial flux machine and method |
| EP4295472A1 (en) | 2021-02-17 | 2023-12-27 | E-Circuit Motors, Inc. | Planar stator configurations for axial flux machines |
| CN113489187B (zh) * | 2021-07-08 | 2022-09-02 | 珠海格力电器股份有限公司 | 减振转子以及具有其的电机 |
| MX2024001426A (es) | 2021-07-30 | 2024-05-14 | E Circuit Motors Inc | Placas de circuito impreso rellenas de material magnetico y estatores de placas de circuito impreso. |
| US11336130B1 (en) | 2021-08-17 | 2022-05-17 | E-Circuit Motors, Inc. | Low-loss planar winding configurations for an axial flux machine |
| DE102021121909B3 (de) * | 2021-08-24 | 2023-01-19 | Schaeffler Technologies AG & Co. KG | Rotoreinheit einer elektrischen Axialflussmaschine und Elektrische Axialflussmaschine |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63262053A (ja) * | 1987-04-15 | 1988-10-28 | Sony Corp | モ−タ |
| JPH11225464A (ja) * | 1998-02-06 | 1999-08-17 | Matsushita Electric Ind Co Ltd | 電動機と動力発生装置と電気掃除機と電気扇風機と電動車 |
| WO2005008865A1 (ja) * | 2003-07-18 | 2005-01-27 | Yamaha Hatsudoki Kabushiki Kaisha | 回転電機及びこの回転電機を備えた電動車両 |
| JP2005261169A (ja) * | 2004-03-15 | 2005-09-22 | Tokyo Univ Of Science | ベアリングレスモータ用回転子およびベアリングレスモータ |
| JP2005287212A (ja) * | 2004-03-30 | 2005-10-13 | Nissan Motor Co Ltd | アキシャルギャップ型回転電機のステータティース構造 |
| JP2006050709A (ja) * | 2004-08-02 | 2006-02-16 | Matsushita Electric Ind Co Ltd | 電動パワーステアリング装置 |
| WO2006049114A1 (ja) * | 2004-11-02 | 2006-05-11 | Matsushita Electric Industrial Co., Ltd. | スラスト動圧軸受およびこれを用いたスピンドルモータならびにこのスピンドルモータを用いた情報記録再生装置 |
| JP2006158035A (ja) * | 2004-11-26 | 2006-06-15 | Matsushita Electric Ind Co Ltd | Dcブラシレスモ−タ |
| JP2006353078A (ja) * | 2005-05-17 | 2006-12-28 | Nissan Motor Co Ltd | アキシャルギャップ型回転電機 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1218056A (en) * | 1968-10-09 | 1971-01-06 | Edward Stanley Beyers | Improvements in alternators |
| JPS5932983B2 (ja) * | 1978-09-01 | 1984-08-13 | 株式会社日立製作所 | 磁石発電機の回転子及びその製造方法 |
| US5110257A (en) | 1988-05-12 | 1992-05-05 | United Technologies Corporation | Apparatus for supporting a rotating shaft in a rotary machine |
| JP3241947B2 (ja) | 1994-10-06 | 2001-12-25 | 株式会社東芝 | 回転電機 |
| CN1153334C (zh) * | 2000-06-29 | 2004-06-09 | 台达电子工业股份有限公司 | 薄型马达 |
| GB2370320A (en) * | 2000-12-21 | 2002-06-26 | Ingersoll Rand Europ Sales Ltd | Compressor and driving motor assembly |
| JP3984630B2 (ja) | 2003-09-10 | 2007-10-03 | 新東工業株式会社 | 回転軸系の振動を制振する装置及び方法 |
| DE102004045626A1 (de) * | 2004-09-21 | 2006-04-06 | Robert Bosch Gmbh | Elektrische Maschine |
| JP2007239268A (ja) | 2006-03-07 | 2007-09-20 | Daiwa House Ind Co Ltd | 制振壁の構造 |
| DE202007007217U1 (de) * | 2007-05-18 | 2007-08-02 | Yeh, Don-Lon | Bürstenloser Motor mit einer lastabhängigen, automatischen Verstellung von Luftspalt |
-
2007
- 2007-09-14 JP JP2007239268A patent/JP5061806B2/ja not_active Expired - Fee Related
-
2008
- 2008-09-11 CN CN2008102153862A patent/CN101388588B/zh not_active Expired - Fee Related
- 2008-09-11 US US12/208,911 patent/US7948132B2/en not_active Expired - Fee Related
- 2008-09-12 KR KR1020080090100A patent/KR101000188B1/ko not_active Expired - Fee Related
- 2008-09-15 EP EP08164315.7A patent/EP2037557B1/en not_active Not-in-force
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63262053A (ja) * | 1987-04-15 | 1988-10-28 | Sony Corp | モ−タ |
| JPH11225464A (ja) * | 1998-02-06 | 1999-08-17 | Matsushita Electric Ind Co Ltd | 電動機と動力発生装置と電気掃除機と電気扇風機と電動車 |
| WO2005008865A1 (ja) * | 2003-07-18 | 2005-01-27 | Yamaha Hatsudoki Kabushiki Kaisha | 回転電機及びこの回転電機を備えた電動車両 |
| JP2005261169A (ja) * | 2004-03-15 | 2005-09-22 | Tokyo Univ Of Science | ベアリングレスモータ用回転子およびベアリングレスモータ |
| JP2005287212A (ja) * | 2004-03-30 | 2005-10-13 | Nissan Motor Co Ltd | アキシャルギャップ型回転電機のステータティース構造 |
| JP2006050709A (ja) * | 2004-08-02 | 2006-02-16 | Matsushita Electric Ind Co Ltd | 電動パワーステアリング装置 |
| WO2006049114A1 (ja) * | 2004-11-02 | 2006-05-11 | Matsushita Electric Industrial Co., Ltd. | スラスト動圧軸受およびこれを用いたスピンドルモータならびにこのスピンドルモータを用いた情報記録再生装置 |
| JP2006158035A (ja) * | 2004-11-26 | 2006-06-15 | Matsushita Electric Ind Co Ltd | Dcブラシレスモ−タ |
| JP2006353078A (ja) * | 2005-05-17 | 2006-12-28 | Nissan Motor Co Ltd | アキシャルギャップ型回転電機 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102889970A (zh) * | 2012-10-22 | 2013-01-23 | 中国船舶重工集团公司第七0四研究所 | 一种实现定子和转子振动特性物理分离的试验方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2037557A3 (en) | 2012-07-25 |
| JP5061806B2 (ja) | 2012-10-31 |
| KR20090028452A (ko) | 2009-03-18 |
| CN101388588A (zh) | 2009-03-18 |
| EP2037557A2 (en) | 2009-03-18 |
| CN101388588B (zh) | 2011-09-14 |
| KR101000188B1 (ko) | 2010-12-10 |
| US7948132B2 (en) | 2011-05-24 |
| EP2037557B1 (en) | 2014-03-19 |
| US20090072640A1 (en) | 2009-03-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5061806B2 (ja) | アキシャルギャップ型回転電機 | |
| JP4394115B2 (ja) | アキシャルギャップ型モータ | |
| JP5770407B2 (ja) | 永久磁石を固定するシステム | |
| JP4729551B2 (ja) | アキシャルギャップ型モータ | |
| JP2008271640A (ja) | アキシャルギャップ型モータ | |
| JP6304124B2 (ja) | 係合システム及びそれを用いたブレーキシステム及びクラッチシステム | |
| JP2010025318A (ja) | 動力伝達装置 | |
| JP5233196B2 (ja) | 回転電機のロータ | |
| KR20150030040A (ko) | 스테이터 코어 및 이를 포함하는 모터 | |
| KR102390035B1 (ko) | 자속 집중형 모터 | |
| JP2008043093A (ja) | 発電機 | |
| JP2001069738A (ja) | 外周対向形モータ | |
| JP2010233325A (ja) | ブラシレスモータ | |
| JP2008131742A (ja) | モータ | |
| JP2007244064A (ja) | 電動機 | |
| JP2018085886A (ja) | 二重ロータ構造のモータ | |
| JP5124998B2 (ja) | 回転電機 | |
| JP5276473B2 (ja) | プーリ構造体 | |
| JP2009171687A (ja) | 回転電機 | |
| JP5017045B2 (ja) | アキシャルギャップ型モータ | |
| JP6035596B2 (ja) | 電動機の回転子及び電動機並びに洗濯機 | |
| JP2005269852A (ja) | ブラシレスモータ | |
| JP6545025B2 (ja) | 回転電機 | |
| JP2013188035A (ja) | 電動機の回転子及び電動機並びに洗濯機 | |
| JP2022088992A (ja) | 回転電機のロータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100827 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100929 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20111122 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20120323 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120704 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120710 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120723 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5061806 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150817 Year of fee payment: 3 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20130213 |
|
| A072 | Dismissal of procedure [no reply to invitation to correct request for examination] |
Free format text: JAPANESE INTERMEDIATE CODE: A072 Effective date: 20130625 |
|
| LAPS | Cancellation because of no payment of annual fees |