JP2008302487A - 基板吸着装置及び基板搬送装置並びに外観検査装置 - Google Patents
基板吸着装置及び基板搬送装置並びに外観検査装置 Download PDFInfo
- Publication number
- JP2008302487A JP2008302487A JP2007153922A JP2007153922A JP2008302487A JP 2008302487 A JP2008302487 A JP 2008302487A JP 2007153922 A JP2007153922 A JP 2007153922A JP 2007153922 A JP2007153922 A JP 2007153922A JP 2008302487 A JP2008302487 A JP 2008302487A
- Authority
- JP
- Japan
- Prior art keywords
- suction
- substrate
- glass substrate
- unit
- adsorption
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/01—Arrangements or apparatus for facilitating the optical investigation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/95—Investigating the presence of flaws or contamination characterised by the material or shape of the object to be examined
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/01—Arrangements or apparatus for facilitating the optical investigation
- G01N2021/0106—General arrangement of respective parts
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/95—Investigating the presence of flaws or contamination characterised by the material or shape of the object to be examined
- G01N2021/9513—Liquid crystal panels
Abstract
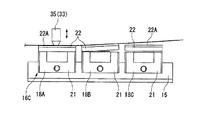
【解決手段】外観検査装置1は、基板吸着装置として板金15に固定された3つの吸着部群16A〜16Cを備える。吸着部群16A〜16Cはガラス基板Wの搬送方向に並んで配置されており、各々が3つの吸着部18A〜18Cを備える。吸着部18A〜18Cは、ガラス基板Wの裏面に吸着可能で、首振り動作が可能な吸着パッド22が1つずつ設けられている。最も中央にある吸着部群16Bの吸着部18Bは、上方に押し付け部33が配置されている。押し付け部33は補助パッド35を降下させてガラス基板Wを吸着部18Bに押し付ける。
【選択図】図3
Description
この発明は、このような事情に鑑みてなされたものであり、基板にかかる応力を抑制しつつ確実に吸着保持できるようにすることを主な目的とする。
この基板吸着装置は、複数の吸着部のうち、基板を吸着できてないものがあったとき、制御部が吸着できていない吸着部でも基板を吸着できるように制御する。このとき、吸着された部分を基点とし、基点となる部分から離れる方向に、例えば、中央から端部に向かって順番に基板が吸着され、基板の反りや捩れの応力が基板端部に逃がされる。
図1及び図2には、この実施の形態に係る基板搬送装置を備える外観検査装置の構成が示されている。なお、基板は、種々の基板を用いることができるが、以下においては、FPD用のガラス基板Wとする。さらに、ガラス基板Wの上面(表面)は、回路素子や、配線パターン等のパターンが形成される素子形成面W1とし、ガラス基板Wの下面(裏面)は、パターンが形成されない非素子形成面W2とする。
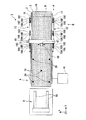
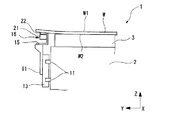
図2及び図3に示すように、保持移動部12は、リニアガイド11に摺動自在に取り付けられるスライダ13を有している。スライダ13には、リニアモータなどリニアガイド11に沿って基板吸着装置である保持移動部12を往復移動させるために機構が内蔵されている。スライダ13の外側面には、支持部14が取り付けられている。支持部14の上部には、L字型の板金15を介して吸着部群16A,16B,16Cが固定されている。図1に示すように、各吸着部群16A〜16Cは、1つの保持移動部12に対して3つずつ、X方向に所定の配置間隔で配設されている。具体的には、ガラス基板WのX方向の側縁部の両隅近傍と、中央の3箇所に相当する位置に設けられている。さらに、各吸着部群16A〜16Cには、3つの吸着部18A、18B、18Cが、X方向に配列されている。吸着部18A〜18Cの配置間隔は、各吸着部群16A〜16Cにおいて同じ間隔になっている。
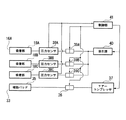
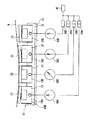
図6に示すように、押し付け部33の補助パッド35は、バルブ36を介してエアーコンプレッサ37に配管接続されている。吸着部群16Aの吸着部18Aは、圧力センサ38Aと、バルブ39Aを介して、真空ポンプなどの吸引源40に配管接続されている。圧力センサ38Aは、吸着部18Aの圧力を検出する着確認部である。その出力信号線は、制御部41に接続されている。同様に、吸着部18Bと吸着部18Cは、それぞれ吸着確認部である圧力センサ38B,38Cと、バルブ39B,39Cを介して、吸引源40に配管接続されている。そして、その出力信号線は、共に制御部41に接続されている。制御部41から出力される信号は、バルブ36,39A〜39Cと、エアーコンプレッサ37と、吸引源40とに入力されるようになっている。他の吸着部群16B,16Cにおいても、吸着部群16Aと共通となる制御部41に接続されている。
検査部5は、保持移動部12の軌道及び基板浮上ステージ3を跨ぐようにベース部2の側面に固定された門型フレーム45と、門型フレーム45の上部にY方向に移動自在に取り付けられた顕微鏡46とを有している。この顕微鏡46は、CCD(電荷結合素子)などの撮像素子47が取り付けられており、ガラス基板Wの表面の拡大画像を取得して外観検査を行うためのもので、不図示のモニタにガラス基板Wの素子形成面W1の拡大像を表示できるようになっている。
ガラス基板Wの検査を行う際には、基板搬送ロボット6が、他の工程から搬出されたガラス基板Wを搬送アーム6A上に受け取り、搬送アーム6Aを外観検査装置1の基板搬入出部4の上方に移動させる。ここで、搬送アーム6Aにおけるガラス基板Wの吸着を解除し、基板搬入出部4から上昇してくるリフトピン20でガラス基板Wを搬送アーム6A上から持ち上げる。この状態で搬送アーム6Aを後退させると、ガラス基板Wが基板搬入出部4に受け渡される。ここで、基板浮上ステージ3は、空気孔10からエアを噴き出しているので、リフトピン20を下げると、ガラス基板Wがエアによって基板浮上ステージ3の上面よりも僅かに上方に浮上させられる。
吸着部18Bが2番目にガラス基板Wを吸着することで、隣りの吸着部18Cに向かってガラス基板Wの側縁部が下がる。吸着部18Cの首振り動作でガラス基板Wに密着した状態で吸引を行うと、ガラス基板Wを吸着できる。
つまり、押し付け部33で最初に吸着させられた吸着部18Aを基点にし、この基点から徐々に離れる方向に配置された吸着部18B,18Cが順番にガラス基板Wを吸着するようになる。
左端の吸着部群16Aでは、押し付け部33を駆動させると、右端の吸着部18Cにガラス基板Wが完全に密着させられて吸着される。その後、前記と同様にして、吸着部18B、吸着部18Aの順番にガラス基板Wを吸着させる。
各吸着部群16A〜16Cで最初にガラス基板Wを吸着する吸着部18A〜18Cに対応して押し付け部33を設けたので、最初の吸着部18A〜18Cで確実にガラス基板Wを吸着できるようになり、続く他の吸着部18A〜18Cがガラス基板Wを吸着するきっかけを作り易い。このようなきっかけを作ることで、そこを基点にしてガラス基板Wを確実に吸着できるようになる。
吸着部18A〜18Cが首振り機構及び伸縮機構を備えるので、ガラス基板Wの反りに合わせて吸着パッド22を傾斜させることができる。このため、ガラス基板Wに確実に密着させることが可能になって吸着エラーが生じ難い。首振り機構又は伸縮機構の一方のみを設けた場合でも同様の効果が得られる。
吸着部群16A〜16Cを含む保持移動部12と、基板浮上ステージ3を備える基板搬送装置や、基板搬送装置に検査部5を設けた外観検査装置1では、ガラス基板Wを確実に吸着保持して搬送したり、検査を行ったりできるので、作業効率や検査精度を向上させることができる。
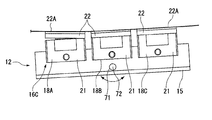
図9に示す吸着部群16Cは、搬送方向に3つの吸着部18A〜18Cが配設されると共に、搬送方向の中央部分に移動機構71が設けられている。移動機構71は、吸着部群16Cを板金15に対して回動させる回動軸72と、不図示の駆動機構とから構成されている。なお、他の吸着部群16A,16Bも同様な移動機構71を備えている。
ガラス基板Wを吸着した後は、移動機構71を再び駆動させ、吸着部群16Cを水平に戻してからガラス基板Wを搬送する。
制御部41では、中央の吸着部群16Bでガラス基板Wを吸着させ、その後に端部側の吸着部群16A,16Cでガラス基板Wを吸着する。ガラス基板Wの搬送方向の中心から端部に向かって順番に吸着するように制御することで、ガラス基板Wの反りや捩れを基板端部に逃すことができ、ガラス基板Wをより平面状に保持することができる。
なお、同じ吸着部群16A〜16C内で、個々の吸着部18A〜18Cを昇降自在な移動機構を設けても良い。この場合は、複数の吸着部18A〜18Cがガラス基板Wの中央から端部に向かって順番にガラス基板Wを吸着するように昇降制御及び吸引制御を行う。また、各吸着部群16A〜16Cの移動機構71を搬送方向への移動機構としても良い。
図11及び図12に示す基板吸着装置である保持移動部12は、各吸着部群16A〜16Cが搬送方向に3つの吸着部18A〜18Cを備える。さらに、吸着部群16Bの上方には、押し付け部81が配置されている。押し付け部81は、中央の吸着部18Bの上方に近接して配置されており、搬送方向に配列された一対のローラ82を有する。ローラ82の回転軸83は、搬送方向と直交し、かつ水平方向に平行に配置されている。ローラ82の外周面は、ガラス基板Wを押え付けることができるが基板表面を傷つけない程度の硬さと、耐磨耗性を備える樹脂などから製造されている。
ローラ82は、不図示の支持部に回転自在に支持されている。支持部には、不図示の移動機構が設けられており、一対のローラ82が矢印に示すように搬送方向で互いに離れる方向、つまり逆方向に移動できるようなになっている。さらに、各ローラ82をガラス基板Wの搬送経路及びその上方から外側に退避させることができるような移動機構も備えている。なお、図11及び図12には一対のローラ82のみが図示されているが、各吸着部群16A〜16Cごとにローラ82を設けることが好ましい。又は、一対のローラ82を全ての吸着部群16A〜16Cの上方に移動可能な支持部材及び移動機構を備えても良い。
制御部41は、ローラ82を使って中央の吸着部群16Bにガラス基板Wを吸着させる。押し付け部81によって、最初に吸着部18Bがガラス基板Wを吸着し、ここを基点とした場合に基点から離れる方向にある2つの吸着部18A,18Cが次にガラス基板Wを吸着する。その後、端部側の吸着部群16A,16Cでガラス基板Wを吸着させる。
ローラ82がガラス基板Wの中央から端部に向かって移動するので、各吸着部18A〜18Cが中央から順番にガラス基板Wを吸着する。これによって、ガラス基板Wの反りや捩れを基板端部に逃すことができ、ガラス基板Wをより平面状に保持することができる。
図13に示すように、基板吸着装置である保持移動部12は、スライダ13に移動機構91を介して板金15が取り付けられている。移動機構91は、Z方向に各吸着部群16A〜16Cを昇降可能に構成されている。各吸着部群16A〜16Cごとに独立に昇降可能に構成されることが好ましいが、各吸着部群16A〜16Cを一体に昇降させる構成でも良い。
移動機構91は、各吸着部群16A〜16Cを昇降させる機構としたが、各吸着部群16A〜16Cを搬送方向に水平移動させる機構でも良い。ガラス基板Wの捩れや反りの仕方によっては、各吸着部群16A〜16Cを搬送方向に水平移動させることで、吸着が可能になる。この場合も中央の吸着部群16Bを最初にスライドさせてガラス基板Wを吸着させ、その後、端部側の吸着部群16A,16Cをスライドさせて吸着する。
図15に示す基板吸着装置である保持移動部12は、多数の吸着部を搬送方向に配列させてある。例えば、ガラス基板Wの搬送方向前側の端部から搬送方向後側の端部に至るまで順番に、吸着部18A、吸着部18B、吸着部18C、吸着部18D、・・・・というように等間隔で配置されている。各吸着部18A〜18Dの吸引経路中には、吸着確認部として圧力センサ38A〜38Dが各吸着部18A〜18Dに対応して設けられている。なお、図15には、吸着部として4つ図示されているが、4つの目以降の吸着部18D及び吸引経路、吸着確認部は、吸着部18A〜18Cと同様の構成になっている。
図16及び図17に示すように、基板吸着装置である保持移動部12は、吸着確認部として撮像装置61が設けられている。撮像装置61は、不図示の移動機構によって搬送方向に平行に移動可能に外観検査装置1に取り付けられている。撮像装置61の移動範囲は、各吸着部18A〜18Cとガラス基板Wを撮像可能な範囲である。不図示の移動機構としては、搬送方向に平行に敷設されたレールと、レール上を移動可能で撮像装置61が搭載されるスライダとを備える構成があげられる。なお、この実施の形態でも吸着部は、ガラス基板Wの搬送方向前側の端部から搬送方向後側の端部に至るまで順番に、吸着部18A、吸着部18B、吸着部18C、・・・・というように等間隔で配置されているものとする。撮像装置61は、全ての吸着部の吸着を確認できるように1つ又は複数も受けられている。
制御部41は、最も吸着具合が良好な吸着部(図17の場合には吸着部18A)を決定し、この吸着部18Aのみでガラス基板Wを吸引する。撮像装置61でその場所でのガラス基板Wの吸着を確認したら、前記の実施の形態と同様に隣りの吸着部18Bでガラス基板Wの吸着を開始し、以降は徐々にガラス基板Wを吸着するポイントを増やす。
例えば、各実施の形態の押し付け部材や、吸着確認部、移動機構のいずれかを組み合わせた構成にしても良い。
ガラス基板Wの吸着のみを行う装置でも良いし、吸着及び搬送を行う装置でも良い。吸着と検査を行う装置でも良い。
吸着部群16A〜16Cは、2つ以上であることが望ましいが1つでも良い。各吸着部群16A〜16Cにおける吸着部18A〜18Dの数は、2つ以上であることが望ましいが、1つでも良い。
押し付け部33の位置は、実施形態の位置に限定されるものではなく、例えば各吸着部群16A〜16Cで統一した位置であっても良い。
3 基板浮上ステージ(基板搬送装置)
5 検査部
11 リニアガイド(基板搬送装置)
12 保持移動部(基板吸着装置)
16A,16B,16C 吸着部群
18A,18B,18C 吸着部
22 吸着パッド
22B 曲面部(首振り機構)
25 チューブ(首振り機構、伸縮機構)
33,81 押し付け部
38A,38B,38C,38D 圧力センサ
40 吸引源
41 制御部
46 顕微鏡(観察光学系)
71,91 移動機構
82 ローラ
Claims (13)
- 基板を載置する載置部と、
前記載置部に載置された基板を吸着保持する複数の吸着部と、
前記複数の吸着部のそれぞれを異なるタイミングで真空吸着可能に制御する制御部と
を備え、前記制御部は、前記複数の吸着部のうち、基板に吸着可能に接触した前記吸着部を基点にし、この基点から離れる方向に順番に吸着するように制御することを特徴とする基板吸着装置。 - 基板に吸着可能に接触するように基板を上方から押し付ける押し付け部を備えることを特徴とする請求項1に記載の基板吸着装置。
- 前記複数の吸着部から吸着部群が形成されており、前記押し付け部は複数の前記吸着部群のそれぞれに配置され、かつその前記吸着部群のなかで基板の中心近くに配置されている前記吸着部の上方に配置されていることを特徴とする請求項2に記載の基板吸着装置。
- 前記押し付け部は、基板面に水平な回転軸を持つローラを有することを特徴とする請求項2又は請求項3に記載の基板吸着装置。
- 前記複数の吸着部の少なくとも1つが基板に向かって上昇可能に構成されていることを特徴とする請求項1に記載の基板吸着装置。
- 前記吸着部が基板に吸着可能に接触したことを検出する吸着確認部を備えることを特徴とする請求項1から請求項5のいずれか一項に記載の基板吸着装置。
- 前記吸着確認部は、前記吸着部と吸引源との間に前記吸着部ごとに設けられた吸引経路の圧力を検出する圧力センサを含むことを特徴とする請求項6に記載の基板吸着装置。
- 前記吸着確認部は、前記吸着部群ごとに設けられた撮像装置を含むことを特徴とする請求項6に記載の基板吸着装置。
- 前記吸着確認部で吸着が確認されないときに、前記吸着部の少なくとも1つを上昇させる移動機構を備えることを特徴とする請求項6から請求項8のいずれか一項に記載の基板吸着装置。
- 前記吸着確認部で吸着が確認されない前記吸着部があったとき、その前記吸着部を含む前記吸着部群を形成する前記吸着部の全体を傾斜、又は前記吸着部の配列方向に移動させる移動機構を備えることを特徴とする請求項6から請求項8のいずれか一項に記載の基板吸着装置。
- 前記吸着部は、首振り機構又は上下方向の伸縮機構を備えることを特徴とする請求項1から請求項10のいずれか一項に記載の基板吸着装置。
- 前記載置部として基板を空気圧で浮上させる機構を有し、浮上させた基板を吸着する前記基板搬送装置を移動可能に構成したことを特徴とする請求項1から請求項11のいずれか一項に記載の基板搬送装置。
- 請求項12に記載の基板搬送装置で基板を搬送する経路中に基板の表面を観察する観察光学系を設けたことを特徴とする外観検査装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007153922A JP2008302487A (ja) | 2007-06-11 | 2007-06-11 | 基板吸着装置及び基板搬送装置並びに外観検査装置 |
| KR1020080052407A KR20080108904A (ko) | 2007-06-11 | 2008-06-04 | 기판 흡착 장치, 기판 반송 장치 및 외관 검사 장치 |
| CNA2008101089197A CN101323396A (zh) | 2007-06-11 | 2008-06-06 | 基板吸附装置和基板搬送装置以及外观检查装置 |
| TW097121524A TW200906695A (en) | 2007-06-11 | 2008-06-10 | Substrate adsorption device, substrate transportation device and external inspection equipment |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007153922A JP2008302487A (ja) | 2007-06-11 | 2007-06-11 | 基板吸着装置及び基板搬送装置並びに外観検査装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008302487A true JP2008302487A (ja) | 2008-12-18 |
| JP2008302487A5 JP2008302487A5 (ja) | 2010-07-01 |
Family
ID=40187135
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007153922A Pending JP2008302487A (ja) | 2007-06-11 | 2007-06-11 | 基板吸着装置及び基板搬送装置並びに外観検査装置 |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP2008302487A (ja) |
| KR (1) | KR20080108904A (ja) |
| CN (1) | CN101323396A (ja) |
| TW (1) | TW200906695A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104058257A (zh) * | 2013-03-22 | 2014-09-24 | 北京北方微电子基地设备工艺研究中心有限责任公司 | 晶片的辅助取片机构、取片系统及取片方法 |
| CN105058401A (zh) * | 2015-08-07 | 2015-11-18 | 天津联欣盈塑胶科技有限公司 | 一种夹取塑料产品的机械手 |
| CN105397828A (zh) * | 2015-11-27 | 2016-03-16 | 大连理工大学 | 一种用于管桩端板加工的大尺寸变直径机器人夹具 |
| WO2022202396A1 (ja) * | 2021-03-25 | 2022-09-29 | 東京エレクトロン株式会社 | 基板搬送装置、塗布処理装置、基板搬送方法および基板搬送プログラム |
| WO2022210940A1 (ja) * | 2021-03-31 | 2022-10-06 | 東京エレクトロン株式会社 | 基板搬送装置、塗布処理装置および基板搬送方法 |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI465313B (zh) * | 2009-04-07 | 2014-12-21 | Kromax Internat Corp | 非接觸式定位平臺與定位方法 |
| KR101906129B1 (ko) * | 2009-11-26 | 2018-10-08 | 가부시키가이샤 니콘 | 기판 처리 장치 및 표시 소자의 제조 방법 |
| KR101309144B1 (ko) * | 2011-01-10 | 2013-09-17 | 엘아이지에이디피 주식회사 | 분사노즐, 이를 이용한 기판 반송장치 및 기판 검사장치 |
| JP5931409B2 (ja) * | 2011-11-14 | 2016-06-08 | 川崎重工業株式会社 | 板材の搬送システム |
| KR102099882B1 (ko) * | 2012-12-27 | 2020-04-13 | 세메스 주식회사 | 기판 처리 장치 및 기판 처리 방법 |
| JP6280805B2 (ja) * | 2014-04-30 | 2018-02-14 | 平田機工株式会社 | ワーク形状測定システム及び制御方法 |
| KR102342231B1 (ko) * | 2014-05-03 | 2021-12-21 | 가부시키가이샤 한도오따이 에네루기 켄큐쇼 | 필름상 부재 지지 장치 |
| EP3341166B1 (en) * | 2015-08-26 | 2023-04-12 | Berkshire Grey Operating Company, Inc. | Systems and methods for providing vacuum valve assemblies for end effectors |
| CN105428290B (zh) * | 2015-12-23 | 2018-06-29 | 上海华虹宏力半导体制造有限公司 | 晶圆传输装置及其真空吸附机械手 |
| US9776809B1 (en) * | 2016-03-31 | 2017-10-03 | Core Flow Ltd. | Conveying system with vacuum wheel |
| TWI648211B (zh) * | 2016-12-20 | 2019-01-21 | 亞智科技股份有限公司 | 吸取基板的方法與吸取裝置 |
| CN106927258A (zh) * | 2017-01-26 | 2017-07-07 | 江苏东旭亿泰智能装备有限公司 | 一种用于玻璃基板的传送装置及其传送方法 |
| CN108238447A (zh) * | 2018-01-16 | 2018-07-03 | 京东方科技集团股份有限公司 | 传输系统 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2004100254A1 (ja) * | 2003-05-06 | 2004-11-18 | Olympus Corporation | 基板吸着装置 |
-
2007
- 2007-06-11 JP JP2007153922A patent/JP2008302487A/ja active Pending
-
2008
- 2008-06-04 KR KR1020080052407A patent/KR20080108904A/ko not_active Application Discontinuation
- 2008-06-06 CN CNA2008101089197A patent/CN101323396A/zh active Pending
- 2008-06-10 TW TW097121524A patent/TW200906695A/zh unknown
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2004100254A1 (ja) * | 2003-05-06 | 2004-11-18 | Olympus Corporation | 基板吸着装置 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104058257A (zh) * | 2013-03-22 | 2014-09-24 | 北京北方微电子基地设备工艺研究中心有限责任公司 | 晶片的辅助取片机构、取片系统及取片方法 |
| CN105058401A (zh) * | 2015-08-07 | 2015-11-18 | 天津联欣盈塑胶科技有限公司 | 一种夹取塑料产品的机械手 |
| CN105397828A (zh) * | 2015-11-27 | 2016-03-16 | 大连理工大学 | 一种用于管桩端板加工的大尺寸变直径机器人夹具 |
| WO2022202396A1 (ja) * | 2021-03-25 | 2022-09-29 | 東京エレクトロン株式会社 | 基板搬送装置、塗布処理装置、基板搬送方法および基板搬送プログラム |
| WO2022210940A1 (ja) * | 2021-03-31 | 2022-10-06 | 東京エレクトロン株式会社 | 基板搬送装置、塗布処理装置および基板搬送方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101323396A (zh) | 2008-12-17 |
| KR20080108904A (ko) | 2008-12-16 |
| TW200906695A (en) | 2009-02-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2008302487A (ja) | 基板吸着装置及び基板搬送装置並びに外観検査装置 | |
| JP2008063020A (ja) | 基板搬送装置およびそれを用いた基板検査システム | |
| JP4633161B2 (ja) | 基板搬送装置 | |
| JP4373175B2 (ja) | 基板搬送装置 | |
| JP5189370B2 (ja) | 基板交換装置及び基板処理装置並びに基板検査装置 | |
| KR20100085128A (ko) | 기판반송장치, 기판반송방법 및 진공처리장치 | |
| JP2006269498A (ja) | 基板保持装置及び基板の保持方法 | |
| JP2009168860A (ja) | 基板用ステージ装置 | |
| TW201302584A (zh) | 破損晶圓回收系統 | |
| JP2007112626A (ja) | 基板搬送装置及び基板検査装置並びに基板搬送方法 | |
| TWI462215B (zh) | 基板處理裝置、轉換方法、及轉移方法 | |
| KR100977870B1 (ko) | 이동탑재 로봇 | |
| JP2007208235A (ja) | 基板搬送装置および基板支持体 | |
| JP2010251769A (ja) | 基板保持装置及び基板の保持方法 | |
| JP4704756B2 (ja) | 基板搬送装置 | |
| JP2008311466A (ja) | 基板保持装置および基板処理装置 | |
| JP3638456B2 (ja) | 基板姿勢変更装置 | |
| JP4311992B2 (ja) | 基板搬送装置 | |
| JP2011199218A (ja) | 基板搬送装置およびそれを用いた基板検査システム | |
| JP2012023104A (ja) | 基板載置装置 | |
| JP2011207606A (ja) | 基板反転装置及び基板反転方法 | |
| JP6407629B2 (ja) | 搬送装置および基板処理装置 | |
| JP2011032056A (ja) | 表示パネル基板搬送装置及び方法、及び表示パネルモジュール組立装置 | |
| JP2009022823A (ja) | 検査装置および基板処理システム | |
| JP5928771B2 (ja) | 基板検査装置および基板検査方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100518 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100518 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111117 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120104 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120508 |