JP2007148346A - 光走査装置及び画像形成装置 - Google Patents
光走査装置及び画像形成装置 Download PDFInfo
- Publication number
- JP2007148346A JP2007148346A JP2006190031A JP2006190031A JP2007148346A JP 2007148346 A JP2007148346 A JP 2007148346A JP 2006190031 A JP2006190031 A JP 2006190031A JP 2006190031 A JP2006190031 A JP 2006190031A JP 2007148346 A JP2007148346 A JP 2007148346A
- Authority
- JP
- Japan
- Prior art keywords
- light
- scanning
- light emitting
- sub
- light source
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


























Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/40—Picture signal circuits
- H04N1/40025—Circuits exciting or modulating particular heads for reproducing continuous tone value scales
- H04N1/40031—Circuits exciting or modulating particular heads for reproducing continuous tone value scales for a plurality of reproducing elements simultaneously
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/04—Scanning arrangements, i.e. arrangements for the displacement of active reading or reproducing elements relative to the original or reproducing medium, or vice versa
- H04N1/19—Scanning arrangements, i.e. arrangements for the displacement of active reading or reproducing elements relative to the original or reproducing medium, or vice versa using multi-element arrays
- H04N1/191—Scanning arrangements, i.e. arrangements for the displacement of active reading or reproducing elements relative to the original or reproducing medium, or vice versa using multi-element arrays the array comprising a one-dimensional array, or a combination of one-dimensional arrays, or a substantially one-dimensional array, e.g. an array of staggered elements
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N2201/00—Indexing scheme relating to scanning, transmission or reproduction of documents or the like, and to details thereof
- H04N2201/04—Scanning arrangements
- H04N2201/047—Detection, control or error compensation of scanning velocity or position
- H04N2201/04753—Control or error compensation of scanning position or velocity
- H04N2201/04758—Control or error compensation of scanning position or velocity by controlling the position of the scanned image area
Abstract
【課題】高コスト化を招くことなく、副走査方向における像の位置ずれを精度良く補正する。
【解決手段】光源ユニットは、同時に2つの走査ライン(ライン1、ライン2)で走査が可能であり、ライン1のデフォルトの走査用光源である発光部Cとライン2のデフォルトの走査用光源である発光部Gとを含む9個の発光部(A、B、C,D、E、F、G、H、I)を有する半導体レーザを含み、走査中に、副走査方向のずれ量に応じて、ライン毎に9個の発光部の中から1個又は2個の発光部が走査用光源として選択され、駆動制御される。これにより、高コスト化を招くことなく、副走査方向における像の位置ずれを精度良く補正することが可能となる。
【選択図】図12
【解決手段】光源ユニットは、同時に2つの走査ライン(ライン1、ライン2)で走査が可能であり、ライン1のデフォルトの走査用光源である発光部Cとライン2のデフォルトの走査用光源である発光部Gとを含む9個の発光部(A、B、C,D、E、F、G、H、I)を有する半導体レーザを含み、走査中に、副走査方向のずれ量に応じて、ライン毎に9個の発光部の中から1個又は2個の発光部が走査用光源として選択され、駆動制御される。これにより、高コスト化を招くことなく、副走査方向における像の位置ずれを精度良く補正することが可能となる。
【選択図】図12
Description
本発明は、光走査装置及び画像形成装置に係り、更に詳しくは、光源からの光を走査対象物に対して走査する光走査装置及び該光走査装置を備えた画像形成装置に関する。
レーザプリンタやデジタル複写機などの画像形成装置では、画像情報に応じて変調された光源からの光をポリゴンミラー、及び走査レンズなどを介して感光体上に集光させるとともに、感光体上を所定の方向(主走査方向)に走査させ、感光体上に潜像(静電潜像)を形成している。そして、その潜像にトナーを付着させることにより、画像情報を顕像化させている。
近年、印刷速度の高速化の要求に対して、これまでポリゴンミラーの回転速度を高速化したり、光源からの光を変調する際に用いられるクロック信号の周波数を高くすることで対応してきたが、これらの手法では限界があり、更なる高速化に対応するために、複数の光源を用いる、いわゆるマルチビーム方式が考案された。(例えば、特許文献1〜特許文献3参照)
上記マルチビームを構成する光源としては、シングルビームのレーザチップを組み合わせる方法や、複数個の発光素子を一つのレーザチップに組み込んだLDアレイや面発光レーザなどが使用されている。
上記マルチビームを構成するLDアレイなどの半導体レーザはきわめて小型であり、かつ駆動電流により高速に直接変調を行うことができるので、近年レーザプリンタ等の光源として広く用いられている。しかし、半導体レーザの駆動電流と光出力との関係は、温度により変化する特性を有するので、半導体レーザの光強度を所望の値に設定しようとする場合問題となる。特に複数の光源を同一チップ上に構成する面発光レーザの場合、光源間の距離が短いため発光、消光による温度変化や温度クロストークなどの影響が顕著であり、光量変動の要因となりやすい。
さらに、マルチビーム光学系の場合、各発光源の発振波長に差があると、走査レンズの色収差が補正されていない光学系の場合に露光位置ずれが発生し、各発光源に対応するスポットが被走査媒体上を走査する時の走査幅は、発光源毎に差が生じてしまい、画像品質の劣化の要因になってしまうため、走査幅の補正を行う必要がある。
例えば特許文献1には、複数の光源を2次元に配置し、複数の光束を偏向器で偏向することにより被走査媒体上を走査する光走査装置であって、発光点間の発熱によるクロストークの影響を発生させずに発光点の配置密度を最大とする光走査装置が開示されている。
また、特許文献2には、面発光レーザを用いた画像形成装置において、画素単位で各チップの発光強度を可変する手段及び発光時間を制御する手段を有することで、画素の静電潜像を制御する方法が開示されている。
また、特許文献3には、面発光レーザを用いた走査装置において、光源の配置を規定した構成とすることにより熱ストロークの問題を回避し、かつ、記録画像の高密度化を実現する方法が開示されている。
ところで、画像形成装置の走査光学系において、ポリゴンミラーの面倒れや偏向反射面の回転軸からの距離のばらつきに起因して、感光体上を走査する光スポット(走査ビーム)の走査位置ずれ、走査速度ムラが発生することがある。この走査位置ずれ、及び走査速度ムラは画像の揺らぎとなり画像品質の劣化を招く。
また、ユーザの画像品質に対する要求は年々厳しくなり、特許文献1〜特許文献3に開示されている装置では、高コスト化を招くことなく、今後要求される高い画像品質に対応するのは、困難であると思われる。
本発明は、かかる事情の下になされたもので、その第1の目的は、高コスト化を招くことなく、副走査方向における像の位置ずれを精度良く補正することができる光走査装置を提供することにある。
また、本発明の第2の目的は、高コスト化を招くことなく、高品質の画像を形成することができる画像形成装置を提供することにある。
本発明は、第1の観点からすると、光源ユニットと、走査対象物に対して前記光源ユニットからの光を走査して前記走査対象物上に像を形成する光学系と、前記光源ユニットを制御する制御手段と、を有する光走査装置において、前記光源ユニットは、副走査方向に対応する方向に配置された複数の光源を含み、前記制御手段は、副走査方向のずれ量に応じて、前記複数の光源の中から、1以上の整数n個及びn+1個のいずれかの光源を走査用光源として選択して駆動制御することを特徴とする光走査装置である。
これによれば、光源ユニットは、副走査方向に対応する方向に配置された複数の光源を含んでいる。そして、制御手段により、複数の光源の中から、n個及びn+1個のいずれかの光源が走査用光源として選択され、駆動制御される。従って、結果として高コスト化を招くことなく、副走査方向における像の位置ずれを精度良く補正することが可能となる。
本発明は、第2の観点からすると、少なくとも1つの走査対象物と;前記少なくとも1つの走査対象物に対して画像情報が含まれる光を走査し、前記走査対象物上に像を形成する少なくとも1つの本発明の光走査装置と;前記走査対象物に形成された像を転写対象物に転写する転写手段と;を備える画像形成装置である。
これによれば、少なくとも1つの本発明の光走査装置を備えているために、高コスト化を招くことなく、高品質の画像を形成することが可能となる。
以下、本発明の一実施形態を図1〜図12に基づいて説明する。図1には、本発明の一実施形態に係る画像形成装置としてのレーザプリンタ100の概略構成が示されている。
図1に示されるレーザプリンタ100は、光走査装置900、走査対象物としての感光体ドラム901、帯電チャージャ902、現像ローラ903、トナーカートリッジ904、クリーニングブレード905、給紙トレイ906、給紙コロ907、レジストローラ対908、転写チャージャ911、定着ローラ909、排紙ローラ912、排紙トレイ910、及び位置ずれセンサ915などを備えている。
上記帯電チャージャ902、現像ローラ903、転写チャージャ911及びクリーニングブレード905は、それぞれ感光体ドラム901の表面近傍に配置されている。そして、感光体ドラム901の回転方向に関して、帯電チャージャ902→現像ローラ903→転写チャージャ911→クリーニングブレード905の順に配置されている。
前記感光体ドラム901の表面には、感光層が形成されている。ここでは、感光体ドラム901は、図1における面内で時計回り(矢印方向)に回転するようになっている。
前記帯電チャージャ902は、感光体ドラム901の表面を均一に帯電させる。
前記光走査装置900は、帯電チャージャ902で帯電された感光体ドラム901の表面に、上位装置(例えばパソコン)からの画像情報に基づいて変調された光を照射する。これにより、感光体ドラム901の表面では、光が照射された部分だけ電荷が消失し、画像情報に対応した潜像が感光体ドラム901の表面に形成される。ここで形成された潜像は、感光体ドラム901の回転に伴って前記現像ローラ903の方向に移動する。ところで、感光体ドラム901の長手方向(回転軸に沿った方向)は「主走査方向」と呼ばれ、感光体ドラム901の回転方向は「副走査方向」と呼ばれている。この光走査装置900の構成については後述する。
前記トナーカートリッジ904にはトナーが格納されており、該トナーは前記現像ローラ903に供給される。このトナーカートリッジ904内のトナー量は、電源投入時や印刷終了時などにチェックされ、残量が少ないときには不図示の表示部に交換を促すメッセージが表示される。
前記現像ローラ903は、回転に伴ってその表面にトナーカートリッジ904から供給されたトナーが帯電されて薄く均一に付着される。また、この現像ローラ903には、感光体ドラム901における帯電している部分(光が照射されなかった部分)と帯電していない部分(光が照射された部分)とで互いに逆方向の電界が生じるような電圧が印加されている。そして、この電圧によって、現像ローラ903の表面に付着しているトナーは、感光体ドラム901の表面の光が照射された部分にだけ付着する。すなわち、現像ローラ903は、感光体ドラム901の表面に形成された潜像にトナーを付着させて画像情報を顕像化させる。ここでトナーが付着された潜像は、感光体ドラム901の回転に伴って前記転写チャージャ911の方向に移動する。
前記給紙トレイ906には転写対象物としての記録紙913が格納されている。この給紙トレイ906の近傍には前記給紙コロ907が配置されており、該給紙コロ907は、記録紙913を給紙トレイ906から1枚づつ取り出し、前記レジストローラ対908に搬送する。該レジストローラ対908は、前記転写ローラ911の近傍に配置され、給紙コロ907によって取り出された記録紙913を一旦保持するとともに、該記録紙913を感光体ドラム901の回転に合わせて感光体ドラム901と転写チャージャ911との間隙部に向けて送り出す。
前記転写チャージャ911には、感光体ドラム901の表面上のトナーを電気的に記録紙913に引きつけるために、トナーとは逆極性の電圧が印加されている。この電圧により、感光体ドラム901の表面の潜像が記録紙913に転写される。ここで転写された記録紙913は、前記定着ローラ909に送られる。
この定着ローラ909では、熱と圧力とが記録紙913に加えられ、これによってトナーが記録紙913上に定着される。ここで定着された記録紙913は、前記排紙ローラ912を介して前記排紙トレイ910に送られ、排紙トレイ910上に順次スタックされる。
前記クリーニングブレード905は、感光体ドラム901の表面に残ったトナー(残留トナー)を除去する。なお、除去された残留トナーは、再度利用されるようになっている。残留トナーが除去された感光体ドラム901の表面は、再度帯電チャージャ902の位置に戻る。
前記位置ずれセンサ915は、感光体ドラム901の近傍に配置され、感光体ドラム901に形成された像の位置を検出し、その位置ずれ情報が含まれる信号を出力する。
次に、前記光走査装置900の構成について図2及び図3を用いて説明する。
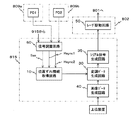
この光走査装置900は、光源ユニット801、コリメートレンズCL、シリンダレンズ805、ポリゴンミラー808、該ポリゴンミラー808を回転させる不図示のポリゴンモータ、fθレンズ806、折り返しミラー807、トロイダルレンズ812、2つの反射ミラー(813、814)、プリント基板802、2つのPD基板(809a、809b)、及び処理回路815などを備えている。なお、本明細書では、光源ユニット801から感光体ドラム901に至る光の光路上に配置された、コリメートレンズCL、シリンダレンズ805、ポリゴンミラー808、fθレンズ806、折り返しミラー807、及びトロイダルレンズ812などからなる光学系を「走査光学系」ともいう。
前記光源ユニット801は、画像情報に応じて変調されたレーザ光をポリゴンミラー808に向けて出射する半導体レーザLDを含んでいる。この半導体レーザLDは、一例として図4に示されるように、それぞれ互いにほぼ同じ発光特性を有する9個の発光部を有している。なお、各発光部は同一基板(チップ)上に形成されている。
9個の発光部は、主走査方向に対応する方向(本明細書では、便宜上、「dir_main方向」ともいう)に直交する副走査方向に対応する方向(本明細書では、便宜上、「dir_sub方向」ともいう)に沿って一列に等間隔に配列されている。なお、dir_main方向については、図4における紙面左側から右側に向かう方向を+方向(+dir_main方向)とし、dir_sub方向については、図4における紙面上側から下側に向かう方向を+方向(+dir_sub方向)とする。そして、+dir_sub方向に向かって順に、発光部A、発光部B、発光部C、発光部D、発光部E、発光部F、発光部G、発光部H、発光部Iがそれぞれ配置されている。また、互いに隣接する発光部のdir_sub方向に関する間隔をΔy12とする。
そして、一例として、ここでは同時に2つの走査ライン(ライン1、ライン2)で走査が行われ、図4に示されるように、ライン1の走査に用いられるデフォルトの走査用光源として発光部Cが設定され、ライン2の走査に用いられるデフォルトの走査用光源として発光部Gが設定されているものとする。
ところで、感光体ドラム901の表面に形成される潜像は、fθレンズ806の特性に起因する走査ムラ、ポリゴンミラー808における偏向反射面のいわゆる面倒れや、偏向反射面の回転軸からの距離のばらつき、ポリゴンミラー808の回転ムラ、半導体レーザLDから出射されるレーザ光の波長変動などによって位置ずれを生じる場合がある。本明細書では、便宜上、主走査方向の位置ずれを「主走査方向ずれ」ともいい、副走査方向の位置ずれを「副走査方向ずれ」ともいう。
図2に戻り、この光源ユニット801は、その背面に前記プリント基板802が装着された状態で光学ハウジング804の壁面にスプリングにより当接されている。なお、壁面に対する前記当接の姿勢は調節ネジ803によって調節可能となっている。これにより、光源ユニット801からの光の出射方向を調節することができる。この調節ネジ803は光学ハウジング804の壁面に形成された突起部に螺合されている。光学ハウジング804の内部には、図3に示されるように、前記コリメートレンズCL、シリンダレンズ805、ポリゴンミラー808、ポリゴンモータ(不図示)、fθレンズ806、折り返しミラー807、トロイダルレンズ812、及び2つの反射ミラー(813、814)が、それぞれ所定の位置に位置決めされ支持されている。また、各PD基板は、光学ハウジング804に前記光源ユニット801と同様に、外側より装着されている。光学ハウジング804は、カバー811により上部が封止され、その壁面から突出した複数の取付部810にてレーザプリンタ100のフレーム部材にネジで固定される。
前記コリメートレンズCLは、光源ユニット801からの光を略平行光とする。前記シリンダレンズ805は、コリメートレンズCLからの光を整形する。
この走査光学系の動作について簡単に説明する。光源ユニット801からの光は、コリメートレンズCLおよびシリンダレンズ805を介して、ポリゴンミラー808の偏向面近傍に一旦結像される。ポリゴンミラー808は、ポリゴンモータ(不図示)によって一定の速度で図3中の矢印B方向に回転しており、その回転に伴って偏向面近傍に結像された光は等角速度的に偏向される。このポリゴンミラー808で偏向された光は、fθレンズ806を介して、折り返しミラー807に入射し、折り返しミラー807で反射され、トロイダルレンズ812を介して感光体ドラム901の表面を主走査方向に走査する。なお、本明細書では、便宜上、主走査方向における走査開始位置から走査終了位置までの1回の走査を「単位走査」ともいう。
また、主走査方向に関して前記折り返しミラー807の両端には、前記2つの反射ミラー(813、814)が設けられている。そして、反射ミラー813で反射された光はPD基板809aに実装されている受光素子(PD1とする。)で受光され、反射ミラー814で反射された光はPD基板809bに実装されている受光素子(PD2とする。)で受光されるようになっている。なお、各受光素子は、いずれも像面と等価な位置に配置されている。ここでは、各反射ミラーは、ポリゴンミラー808により偏向された光が、単位走査前に受光素子PD1に入射し、単位走査後に受光素子PD2に入射するように配置されている。各受光素子は、それぞれ受光量に応じた信号(光電変換信号)を出力する。
前記プリント基板802には、図5に示されるように、レーザ駆動回路50が実装されている。このレーザ駆動回路50は、処理回路815からの後述するシリアル信号に基づいて各発光部の駆動信号をそれぞれ生成する。ここで生成された各駆動信号は前記光源ユニット801に出力される。光源ユニット801では、各駆動信号を半導体レーザLDに供給する。
前記処理回路815は、図5に示されるように、信号調整回路60、位置ずれ情報取得回路10、変調データ生成回路30、シリアル信号生成回路35、及び画像データ生成回路40などを有している。
信号調整回路60は、受光素子PD1の出力信号を増幅、反転及び2値化して信号Hsync1を生成するとともに、受光素子PD2の出力信号を増幅、反転及び2値化して信号Hsync2を生成する。そこで、受光素子PD1に光が入射すると信号Hsync1は「H(ハイレベル)」から「L(ローレベル)」に変化し、受光素子PD2に光が入射すると信号Hsync2は「H」から「L」に変化する。また、信号調整回路60は、位置ずれセンサ915の出力信号を増幅及び2値化して信号Ssnを生成する。
位置ずれ情報取得回路10は、例えば画像情報に応じた本来の走査に先立って行われる位置ずれ情報を取得するための走査における前記信号Ssnに基づいて、副走査方向のずれ量(本明細書では、便宜上「サブずれ量」ともいう。)を取得する。なお、サブずれ量が0のときの隣接する走査ライン間の副走査方向の距離(間隔)をLとする。
そして、本来の走査の際に、位置ずれ情報取得回路10は、取得されたサブずれ量に基づいて、副走査方向ずれを補正するための補正情報が含まれる補正情報信号を生成する。この補正情報信号は変調データ生成回路30に出力される。
前記画像データ生成回路40は、上位装置からの画像情報に基づいて、画像データを生成する。
前記変調データ生成回路30は、位置ずれ情報取得回路10からの補正情報信号に基づいて走査用光源を選択するとともに、画像データ生成回路40からの画像データに基づいて、走査用光源を駆動制御するための変調データを生成する。
前記シリアル信号生成回路35は、変調データ生成回路30からの変調データをシリアル信号に変換し、レーザ駆動回路50に出力する。このシリアル信号生成回路35は、例えばシフトレジスタを用いて構成することができる。
ところで、本実施形態では、一例として図6に示されるように、1画素に対応する時間幅(Tsとする)の1/8のパルス幅で各発光部の発光時間を制御できるものとする。
そこで、補正情報信号に基づいて1つの発光部又は互いに隣接する2つの発光部を走査用光源とするときには、一例として図7に示されるように、17種類(M1〜M17)の発光パターンのいずれかが、変調データ生成回路30で選択される。なお、ここでは、具体例として、ライン1におけるサブずれ量が(1/4)×Lよりも小さいときに、副走査方向ずれを補正する場合について説明する。
発光パターンM1は、サブずれ量が0の場合に適用され、発光部Cが通常のパルス幅Tsで発光され、発光部B及び発光部Dはいずれも発光されない。このときの光の重心は図8(A)に符号Gaで示されるように、発光部Cの発光点とほぼ一致する。この場合には、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置している。
発光パターンM2は、サブずれ量が−(1/32)×Lの場合に適用され、発光部Cが(7/8)Tsのパルス幅で発光され、発光部Dが(1/8)Tsのパルス幅で発光され、発光部Bは発光されない。このときの光の重心は図8(B)に符号Gbで示されるように、Gaよりも(1/8)×Δy12だけdir_sub方向に+となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンM3は、サブずれ量が−(2/32)×Lの場合に適用され、発光部Cが(6/8)Tsのパルス幅で発光され、発光部Dが(2/8)Tsのパルス幅で発光され、発光部Bは発光されない。このときの光の重心は図8(C)に符号Gcで示されるように、Gaよりも(2/8)×Δy12だけdir_sub方向に+となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンM4は、サブずれ量が−(3/32)×Lの場合に適用され、発光部Cが(5/8)Tsのパルス幅で発光され、発光部Dが(3/8)Tsのパルス幅で発光され、発光部Bは発光されない。このときの光の重心は図8(D)に符号Gdで示されるように、Gaよりも(3/8)×Δy12だけdir_sub方向に+となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンM5は、サブずれ量が−(4/32)×Lの場合に適用され、発光部Cが(4/8)Tsのパルス幅で発光され、発光部Dが(4/8)Tsのパルス幅で発光され、発光部Bは発光されない。このときの光の重心は図8(E)に符号Geで示されるように、Gaよりも(4/8)×Δy12だけdir_sub方向に+となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンM6は、サブずれ量が−(5/32)×Lの場合に適用され、発光部Cが(3/8)Tsのパルス幅で発光され、発光部Dが(5/8)Tsのパルス幅で発光され、発光部Bは発光されない。このときの光の重心は図8(F)に符号Gfで示されるように、Gaよりも(5/8)×Δy12だけdir_sub方向に+となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンM7は、サブずれ量が−(6/32)×Lの場合に適用され、発光部Cが(2/8)Tsのパルス幅で発光され、発光部Dが(6/8)Tsのパルス幅で発光され、発光部Bは発光されない。このときの光の重心は図9(A)に符号Ggで示されるように、Gaよりも(6/8)×Δy12だけdir_sub方向に+となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンM8は、サブずれ量が−(7/32)×Lの場合に適用され、発光部Cが(1/8)Tsのパルス幅で発光され、発光部Dが(7/8)Tsのパルス幅で発光され、発光部Bは発光されない。このときの光の重心は図9(B)に符号Ghで示されるように、Gaよりも(7/8)×Δy12だけdir_sub方向に+となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンM9は、サブずれ量が−(8/32)×Lの場合に適用され、発光部DがTsのパルス幅で発光され、発光部C及び発光部Bは発光されない。このときの光の重心は図9(C)に符号Giで示されるように、発光部Dの発光点とほぼ一致する。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンM10は、サブずれ量が+(1/32)×Lの場合に適用され、発光部Bが(1/8)Tsのパルス幅で発光され、発光部Cが(7/8)Tsのパルス幅で発光され、発光部Dは発光されない。このときの光の重心は図9(D)に符号Gjで示されるように、Gaよりも(1/8)×Δy12だけdir_sub方向に−となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンM11は、サブずれ量が+(2/32)×Lの場合に適用され、発光部Bが(2/8)Tsのパルス幅で発光され、発光部Cが(6/8)Tsのパルス幅で発光され、発光部Dは発光されない。このときの光の重心は図9(E)に符号Gkで示されるように、Gaよりも(2/8)×Δy12だけdir_sub方向に−となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンM12は、サブずれ量が+(3/32)×Lの場合に適用され、発光部Bが(3/8)Tsのパルス幅で発光され、発光部Cが(5/8)Tsのパルス幅で発光され、発光部Dは発光されない。このときの光の重心は図9(F)に符号Glで示されるように、Gaよりも(3/8)×Δy12だけdir_sub方向に−となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンM13は、サブずれ量が+(4/32)×Lの場合に適用され、発光部Bが(4/8)Tsのパルス幅で発光され、発光部Cが(4/8)Tsのパルス幅で発光され、発光部Dは発光されない。このときの光の重心は図10(A)に符号Gmで示されるように、Gaよりも(4/8)×Δy12だけdir_sub方向に−となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンM14は、サブずれ量が+(5/32)×Lの場合に適用され、発光部Bが(5/8)Tsのパルス幅で発光され、発光部Cが(3/8)Tsのパルス幅で発光され、発光部Dは発光されない。このときの光の重心は図10(B)に符号Gnで示されるように、Gaよりも(5/8)×Δy12だけdir_sub方向に−となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンM15は、サブずれ量が+(6/32)×Lの場合に適用され、発光部Bが(6/8)Tsのパルス幅で発光され、発光部Cが(2/8)Tsのパルス幅で発光され、発光部Dは発光されない。このときの光の重心は図10(C)に符号Goで示されるように、Gaよりも(6/8)×Δy12だけdir_sub方向に−となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンM16は、サブずれ量が+(7/32)×Lの場合に適用され、発光部Bが(7/8)Tsのパルス幅で発光され、発光部Cが(1/8)Tsのパルス幅で発光され、発光部Dは発光されない。このときの光の重心は図10(D)に符号Gpで示されるように、Gaよりも(7/8)×Δy12だけdir_sub方向に−となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンM17は、サブずれ量が+(8/32)×Lの場合に適用され、発光部BがTsのパルス幅で発光され、発光部C及び発光部Dはいずれも発光されない。このときの光の重心は図10(E)に符号Gqで示されるように、発光部Bの発光点とほぼ一致する。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
これらの発光パターンにより、光源ユニット801からの光の光量を一定に保ちつつ、光源ユニット801からの光の重心をDir_sub方向に移動させることができる。本実施形態の場合には、副走査方向のずれに対する補正量は、L/32を単位とすることとなる。
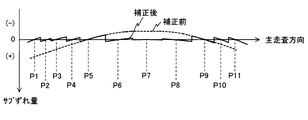
そこで、ライン1におけるサブずれ量が、一例として図11(A)及び図11(B)に示されるときに、変調データ生成回路30における副走査方向ずれの補正方法について説明する。ここでは、主走査方向における位置P1でのサブずれ量は+(1/2)×Lであり、位置P2でのサブずれ量は+(3/8)×Lであり、位置P3でのサブずれ量は+(1/4)×Lであり、位置P4でのサブずれ量は+(1/8)×Lであり、位置P5でのサブずれ量は0であり、位置P6でのサブずれ量は−(1/8)×Lであり、位置P7でのサブずれ量は−(1/4)×Lであり、位置P8でのサブずれ量は−(1/8)×Lであり、位置P9でのサブずれ量は0であり、位置P10でのサブずれ量は+(1/8)×Lであり、位置P11でのサブずれ量は+(1/4)×Lであるものとする。そして、図11(B)に示されるように、サブずれ量に応じて、主走査方向の位置毎に副走査方向のずれ量に対する補正量が決定される。
1.変調データ生成回路30は、主走査方向における走査位置が位置P1近傍になると、図12(A)に示されるように発光部Aを走査用光源とする。このときの発光部Aのパルス幅はTsである。これにより、一例として図14に示されるように、位置P1でのサブずれ量はほぼ0となる。
2.主走査方向における走査位置が位置P1と位置P2との中間近傍になると、図12(B)に示されるように発光部Aと発光部Bを走査用光源とする。このときの発光部A及び発光部Bのパルス幅はいずれも(1/2)Tsである。これにより、一例として図14に示されるように、位置P2でのサブずれ量はほぼ0となる。
3.主走査方向における走査位置が位置P2と位置P3との中間近傍になると、図12(C)に示されるように発光部Bを走査用光源とする。このときの発光部Bのパルス幅はTsである。これにより、一例として図14に示されるように、位置P3でのサブずれ量はほぼ0となる。
4.主走査方向における走査位置が位置P3と位置P4との中間近傍になると、図12(D)に示されるように発光部Bと発光部Cを走査用光源とする。このときの発光部B及び発光部Cのパルス幅はいずれも(1/2)Tsである。これにより、一例として図14に示されるように、位置P4でのサブずれ量はほぼ0となる。
5.主走査方向における走査位置が位置P4と位置P5との中間近傍になると、図12(E)に示されるように発光部Cを走査用光源とする。このときの発光部Cのパルス幅はTsである。これにより、一例として図14に示されるように、位置P5でのサブずれ量はほぼ0となる。
6.主走査方向における走査位置が位置P5と位置P6との中間近傍になると、図12(F)に示されるように発光部Cと発光部Dを走査用光源とする。このときの発光部C及び発光部Dのパルス幅はいずれも(1/2)Tsである。これにより、一例として図14に示されるように、位置P6でのサブずれ量はほぼ0となる。
7.主走査方向における走査位置が位置P6と位置P7との中間近傍になると、図13(A)に示されるように発光部Dを走査用光源とする。このときの発光部Dのパルス幅はTsである。これにより、一例として図14に示されるように、位置P7でのサブずれ量はほぼ0となる。
8.主走査方向における走査位置が位置P7と位置P8との中間近傍になると、図13(B)に示されるように発光部Cと発光部Dを走査用光源とする。このときの発光部C及び発光部Dのパルス幅はいずれも(1/2)Tsである。これにより、一例として図14に示されるように、位置P8でのサブずれ量はほぼ0となる。
9.主走査方向における走査位置が位置P8と位置P9との中間近傍になると、図13(C)に示されるように発光部Cを走査用光源とする。このときの発光部Cのパルス幅はTsである。これにより、一例として図14に示されるように、位置P9でのサブずれ量はほぼ0となる。
10.主走査方向における走査位置が位置P9と位置P10との中間近傍になると、図13(D)に示されるように発光部Bと発光部Cを走査用光源とする。このときの発光部B及び発光部Cのパルス幅はいずれも(1/2)Tsである。これにより、一例として図14に示されるように、位置P10でのサブずれ量はほぼ0となる。
11.主走査方向における走査位置が位置P10と位置P11との中間近傍になると、図13(D)に示されるように発光部Bを走査用光源とする。このときの発光部Bのパルス幅はTsである。これにより、一例として図14に示されるように、位置P11でのサブずれ量はほぼ0となる。
2.主走査方向における走査位置が位置P1と位置P2との中間近傍になると、図12(B)に示されるように発光部Aと発光部Bを走査用光源とする。このときの発光部A及び発光部Bのパルス幅はいずれも(1/2)Tsである。これにより、一例として図14に示されるように、位置P2でのサブずれ量はほぼ0となる。
3.主走査方向における走査位置が位置P2と位置P3との中間近傍になると、図12(C)に示されるように発光部Bを走査用光源とする。このときの発光部Bのパルス幅はTsである。これにより、一例として図14に示されるように、位置P3でのサブずれ量はほぼ0となる。
4.主走査方向における走査位置が位置P3と位置P4との中間近傍になると、図12(D)に示されるように発光部Bと発光部Cを走査用光源とする。このときの発光部B及び発光部Cのパルス幅はいずれも(1/2)Tsである。これにより、一例として図14に示されるように、位置P4でのサブずれ量はほぼ0となる。
5.主走査方向における走査位置が位置P4と位置P5との中間近傍になると、図12(E)に示されるように発光部Cを走査用光源とする。このときの発光部Cのパルス幅はTsである。これにより、一例として図14に示されるように、位置P5でのサブずれ量はほぼ0となる。
6.主走査方向における走査位置が位置P5と位置P6との中間近傍になると、図12(F)に示されるように発光部Cと発光部Dを走査用光源とする。このときの発光部C及び発光部Dのパルス幅はいずれも(1/2)Tsである。これにより、一例として図14に示されるように、位置P6でのサブずれ量はほぼ0となる。
7.主走査方向における走査位置が位置P6と位置P7との中間近傍になると、図13(A)に示されるように発光部Dを走査用光源とする。このときの発光部Dのパルス幅はTsである。これにより、一例として図14に示されるように、位置P7でのサブずれ量はほぼ0となる。
8.主走査方向における走査位置が位置P7と位置P8との中間近傍になると、図13(B)に示されるように発光部Cと発光部Dを走査用光源とする。このときの発光部C及び発光部Dのパルス幅はいずれも(1/2)Tsである。これにより、一例として図14に示されるように、位置P8でのサブずれ量はほぼ0となる。
9.主走査方向における走査位置が位置P8と位置P9との中間近傍になると、図13(C)に示されるように発光部Cを走査用光源とする。このときの発光部Cのパルス幅はTsである。これにより、一例として図14に示されるように、位置P9でのサブずれ量はほぼ0となる。
10.主走査方向における走査位置が位置P9と位置P10との中間近傍になると、図13(D)に示されるように発光部Bと発光部Cを走査用光源とする。このときの発光部B及び発光部Cのパルス幅はいずれも(1/2)Tsである。これにより、一例として図14に示されるように、位置P10でのサブずれ量はほぼ0となる。
11.主走査方向における走査位置が位置P10と位置P11との中間近傍になると、図13(D)に示されるように発光部Bを走査用光源とする。このときの発光部Bのパルス幅はTsである。これにより、一例として図14に示されるように、位置P11でのサブずれ量はほぼ0となる。
このように、走査中に、副走査方向のずれ量に応じて、複数の発光部の中から1個及び2個のいずれかの発光部が走査用光源として選択され、駆動制御される。これにより、一例として図14に示されるように、全体的にサブずれ量が減少し、画像の品質が向上する。
なお、ライン2におけるサブずれ量も、同様にして補正される。
以上の説明から明らかなように、本実施形態に係るレーザプリンタ100では、帯電チャージャ902と現像ローラ903とトナーカートリッジ904と転写チャージャ911とによって転写手段が構成されている。
また、本実施形態に係る光走査装置900では、変調データ生成回路30によって制御手段が構成されている。
以上説明したように、本実施形態に係る光走査装置900によると、光源ユニット801は9個の発光部を有する半導体レーザLDを含んでいる。そして、変調データ生成回路30により、副走査方向のずれ量に応じて、9個の発光部の中から1個又は2個の発光部が走査用光源として選択され、駆動制御される。従って、高コスト化を招くことなく、副走査方向ずれを精度良く補正することが可能となる。
また、本実施形態に係る光走査装置900によると、変調データ生成回路30は、dir_sub方向に互いに隣接する2個の発光部を走査用光源として選択すると、各発光部の駆動信号におけるパルス幅をそれぞれ制御しているため、副走査方向ずれの補正アルゴリズムを単純化することができる。
また、本実施形態に係る光走査装置900によると、変調データ生成回路30は、dir_sub方向に互いに隣接する2個の発光部を走査用光源として選択すると、各発光部からそれぞれ出射される光の光量の合計が予め設定された値と一致するように制御しているため、濃度むらの発生を抑制することができる。
また、本実施形態に係る光走査装置900によると、複数の発光部は、それぞれ同一チップ上に形成されているため、発光部の間隔がそれぞれほぼ設計通りとなり、副走査方向ずれを精度良く補正することができる。更に、単一の光源を複数個用いる場合に比べて消費電力を低減することができる。
また、本実施形態に係るレーザプリンタ100によると、副走査方向ずれを精度良く補正することができる光走査装置900を備えているため、高品質の画像を形成することが可能となる。
なお、上記実施形態では、発光パターンが17種類(M1〜M17)の場合について説明したが、本発明がこれに限定されるものではない。
また、上記実施形態では、副走査方向ずれが正のときと負のときとで、発光パターンの数が同じ場合について説明したが、本発明がこれに限られるものではなく、副走査方向ずれが正のときと負のときとで、発光パターンの数が異なっていても良い。
また、上記実施形態では、発光部Cがライン1の走査に用いられるデフォルトの走査用光源の場合について説明したが、本発明がこれに限られるものではない。
また、上記実施形態では、発光部Gがライン2の走査に用いられるデフォルトの走査用光源の場合について説明したが、本発明がこれに限られるものではない。
また、上記実施形態では、同時に2つの走査ラインで走査が行われる場合について説明したが、本発明がこれに限られるものではない。
また、上記実施形態では、1つの走査ラインに対するデフォルトの走査用光源が1つの発光部である場合について説明したが、本発明がこれに限定されるものではなく、例えば、1つの発光部の発光光量が少ない場合には、1つの走査ラインに対するデフォルトの走査用光源が複数の発光部であっても良い。ここで、一例として図15に示されるように、ライン1の走査に用いられるデフォルトの走査用光源として発光部CとDが設定され、ライン2の走査に用いられるデフォルトの走査用光源としてと発光部GとHが設定されている場合について説明する。
この場合に、上記実施形態と同じ精度で、ライン1における副走査方向ずれを補正するときには、一例として図16に示されるように、17種類(Q1〜Q17)の発光パターンのいずれかが、変調データ生成回路30で選択される。
発光パターンQ1は、サブずれ量が0の場合に適用され、発光部C及び発光部Dがいずれも通常のパルス幅Tsで発光され、発光部B及び発光部Eはいずれも発光されない。このときの光の重心は図17(A)に符号Gaで示されるように、発光部Cの発光点と発光部Dの発光点の中間位置とほぼ一致する。この場合には、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置している。
発光パターンQ2は、サブずれ量が−(1/32)×Lの場合に適用され、発光部Cが(7/8)Tsのパルス幅で発光され、発光部Dが通常のパルス幅Tsで発光され、発光部Eが(1/8)Tsのパルス幅で発光され、発光部Bは発光されない。このときの光の重心は図17(B)に符号Gbで示されるように、Gaよりも(1/8)×Δy12だけdir_sub方向に+となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンQ3は、サブずれ量が−(2/32)×Lの場合に適用され、発光部Cが(6/8)Tsのパルス幅で発光され、発光部Dが通常のパルス幅Tsで発光され、発光部Eが(2/8)Tsのパルス幅で発光され、発光部Bは発光されない。このときの光の重心は図17(C)に符号Gcで示されるように、Gaよりも(2/8)×Δy12だけdir_sub方向に+となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンQ4は、サブずれ量が−(3/32)×Lの場合に適用され、発光部Cが(5/8)Tsのパルス幅で発光され、発光部Dが通常のパルス幅Tsで発光され、発光部Eが(3/8)Tsのパルス幅で発光され、発光部Bは発光されない。このときの光の重心は図17(D)に符号Gdで示されるように、Gaよりも(3/8)×Δy12だけdir_sub方向に+となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンQ5は、サブずれ量が−(4/32)×Lの場合に適用され、発光部Cが(4/8)Tsのパルス幅で発光され、発光部Dが通常のパルス幅Tsで発光され、発光部Eが(4/8)Tsのパルス幅で発光され、発光部Bは発光されない。このときの光の重心は図17(E)に符号Geで示されるように、Gaよりも(4/8)×Δy12だけdir_sub方向に+となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンQ6は、サブずれ量が−(5/32)×Lの場合に適用され、発光部Cが(3/8)Tsのパルス幅で発光され、発光部Dが通常のパルス幅Tsで発光され、発光部Eが(5/8)Tsのパルス幅で発光され、発光部Bは発光されない。このときの光の重心は図17(F)に符号Gfで示されるように、Gaよりも(5/8)×Δy12だけdir_sub方向に+となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンQ7は、サブずれ量が−(6/32)×Lの場合に適用され、発光部Cが(2/8)Tsのパルス幅で発光され、発光部Dが通常のパルス幅Tsで発光され、発光部Eが(6/8)Tsのパルス幅で発光され、発光部Bは発光されない。このときの光の重心は図18(A)に符号Ggで示されるように、Gaよりも(6/8)×Δy12だけdir_sub方向に+となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンQ8は、サブずれ量が−(7/32)×Lの場合に適用され、発光部Cが(1/8)Tsのパルス幅で発光され、発光部Dが通常のパルス幅Tsで発光され、発光部Eが(7/8)Tsのパルス幅で発光され、発光部Bは発光されない。このときの光の重心は図18(B)に符号Ghで示されるように、Gaよりも(7/8)×Δy12だけdir_sub方向に+となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンQ9は、サブずれ量が−(8/32)×Lの場合に適用され、発光部D及び発光部EがTsのパルス幅で発光され、発光部C及び発光部Bは発光されない。このときの光の重心は図18(C)に符号Giで示されるように、発光部Dの発光点とほぼ一致する。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンQ10は、サブずれ量が+(1/32)×Lの場合に適用され、発光部Cが通常のパルス幅Tsで発光され、発光部Dが(7/8)Tsのパルス幅で発光され、発光部Bが(1/8)Tsのパルス幅で発光され、発光部Eは発光されない。このときの光の重心は図18(D)に符号Gjで示されるように、Gaよりも(1/8)×Δy12だけdir_sub方向に−となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンQ11は、サブずれ量が+(2/32)×Lの場合に適用され、発光部Cが通常のパルス幅Tsで発光され、発光部Dが(6/8)Tsのパルス幅で発光され、発光部Bが(2/8)Tsのパルス幅で発光され、発光部Eは発光されない。このときの光の重心は図18(E)に符号Gkで示されるように、Gaよりも(2/8)×Δy12だけdir_sub方向に−となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンQ12は、サブずれ量が+(3/32)×Lの場合に適用され、発光部Cが通常のパルス幅Tsで発光され、発光部Dが(5/8)Tsのパルス幅で発光され、発光部Bが(3/8)Tsのパルス幅で発光され、発光部Eは発光されない。このときの光の重心は図18(F)に符号Glで示されるように、Gaよりも(3/8)×Δy12だけdir_sub方向に−となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンQ13は、サブずれ量が+(4/32)×Lの場合に適用され、発光部Cが通常のパルス幅Tsで発光され、発光部Dが(4/8)Tsのパルス幅で発光され、発光部Bが(4/8)Tsのパルス幅で発光され、発光部Eは発光されない。このときの光の重心は図19(A)に符号Gmで示されるように、Gaよりも(4/8)×Δy12だけdir_sub方向に−となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンQ14は、サブずれ量が+(5/32)×Lの場合に適用され、発光部Cが通常のパルス幅Tsで発光され、発光部Dが(3/8)Tsのパルス幅で発光され、発光部Bが(5/8)Tsのパルス幅で発光され、発光部Eは発光されない。このときの光の重心は図19(B)に符号Gnで示されるように、Gaよりも(5/8)×Δy12だけdir_sub方向に−となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンQ15は、サブずれ量が+(6/32)×Lの場合に適用され、発光部Cが通常のパルス幅Tsで発光され、発光部Dが(2/8)Tsのパルス幅で発光され、発光部Bが(6/8)Tsのパルス幅で発光され、発光部Eは発光されない。このときの光の重心は図19(C)に符号Goで示されるように、Gaよりも(6/8)×Δy12だけdir_sub方向に−となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンQ16は、サブずれ量が+(7/32)×Lの場合に適用され、発光部Cが通常のパルス幅Tsで発光され、発光部Dが(1/8)Tsのパルス幅で発光され、発光部Bが(7/8)Tsのパルス幅で発光され、発光部Eは発光されない。このときの光の重心は図19(D)に符号Gpで示されるように、Gaよりも(7/8)×Δy12だけdir_sub方向に−となる。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
発光パターンQ17は、サブずれ量が+(8/32)×Lの場合に適用され、発光部B及び発光部CがTsのパルス幅で発光され、発光部D及び発光部Eは発光されない。このときの光の重心は図19(E)に符号Gqで示されるように、発光部Bの発光点と発光部Cの発光点の中間位置とほぼ一致する。これにより、感光体ドラム901上に集光される光スポットの重心は目標の走査ライン上に位置することとなる。
そこで、一例として、ライン1におけるサブずれ量が、上記実施形態と同じ場合について(図11(A)及び図11(B)参照)、変調データ生成回路30における副走査方向ずれの補正方法について説明する。
1.変調データ生成回路30は、主走査方向における走査位置が位置P1近傍になると、図20(A)に示されるように発光部Aと発光部Bを走査用光源とする。このときの発光部A及び発光部Bのパルス幅はいずれもTsである。これにより、位置P1でのサブずれ量はほぼ0となる。
2.主走査方向における走査位置が位置P1と位置P2との中間近傍になると、図20(B)に示されるように発光部Aと発光部Bと発光部Cを走査用光源とする。このときの発光部A及び発光部Cのパルス幅はいずれも(1/2)Tsであり、発光部Bのパルス幅はTsである。これにより、位置P2でのサブずれ量はほぼ0となる。
3.主走査方向における走査位置が位置P2と位置P3との中間近傍になると、図20(C)に示されるように発光部Bと発光部Cを走査用光源とする。このときの発光部B及び発光部Cのパルス幅はいずれもTsである。これにより、位置P3でのサブずれ量はほぼ0となる。
4.主走査方向における走査位置が位置P3と位置P4との中間近傍になると、図20(D)に示されるように発光部Bと発光部Cと発光部Dを走査用光源とする。このときの発光部B及び発光部Dのパルス幅はいずれも(1/2)Tsであり、発光部Cのパルス幅はTsである。これにより、位置P4でのサブずれ量はほぼ0となる。
5.主走査方向における走査位置が位置P4と位置P5との中間近傍になると、図20(E)に示されるように発光部Cと発光部Dを走査用光源とする。このときの発光部C及び発光部Dのパルス幅はいずれもTsである。これにより、位置P5でのサブずれ量はほぼ0となる。
6.主走査方向における走査位置が位置P5と位置P6との中間近傍になると、図20(F)に示されるように発光部Cと発光部Dと発光部Eを走査用光源とする。このときの発光部C及び発光部Eのパルス幅はいずれも(1/2)Tsであり、発光部Dのパルス幅はTsである。これにより、位置P6でのサブずれ量はほぼ0となる。
7.主走査方向における走査位置が位置P6と位置P7との中間近傍になると、図21(A)に示されるように発光部Dと発光部Eを走査用光源とする。このときの発光部D及び発光部Eのパルス幅はいずれもTsである。これにより、位置P7でのサブずれ量はほぼ0となる。
8.主走査方向における走査位置が位置P7と位置P8との中間近傍になると、図21(B)に示されるように発光部Cと発光部Dと発光部Eを走査用光源とする。このときの発光部C及び発光部Eのパルス幅はいずれも(1/2)Tsであり、発光部Dのパルス幅はTsである。これにより、位置P8でのサブずれ量はほぼ0となる。
9.主走査方向における走査位置が位置P8と位置P9との中間近傍になると、図21(C)に示されるように発光部Cと発光部Dを走査用光源とする。このときの発光部C及び発光部Dのパルス幅はいずれもTsである。これにより、位置P9でのサブずれ量はほぼ0となる。
10.主走査方向における走査位置が位置P9と位置P10との中間近傍になると、図21(D)に示されるように発光部Bと発光部Cと発光部Dを走査用光源とする。このときの発光部B及び発光部Dのパルス幅はいずれも(1/2)Tsであり、発光部Cのパルス幅はTsである。これにより、位置P10でのサブずれ量はほぼ0となる。
11.主走査方向における走査位置が位置P10と位置P11との中間近傍になると、図21(D)に示されるように発光部Bと発光部Cを走査用光源とする。このときの発光部B及び発光部Cのパルス幅はいずれもTsである。これにより、位置P11でのサブずれ量はほぼ0となる。
2.主走査方向における走査位置が位置P1と位置P2との中間近傍になると、図20(B)に示されるように発光部Aと発光部Bと発光部Cを走査用光源とする。このときの発光部A及び発光部Cのパルス幅はいずれも(1/2)Tsであり、発光部Bのパルス幅はTsである。これにより、位置P2でのサブずれ量はほぼ0となる。
3.主走査方向における走査位置が位置P2と位置P3との中間近傍になると、図20(C)に示されるように発光部Bと発光部Cを走査用光源とする。このときの発光部B及び発光部Cのパルス幅はいずれもTsである。これにより、位置P3でのサブずれ量はほぼ0となる。
4.主走査方向における走査位置が位置P3と位置P4との中間近傍になると、図20(D)に示されるように発光部Bと発光部Cと発光部Dを走査用光源とする。このときの発光部B及び発光部Dのパルス幅はいずれも(1/2)Tsであり、発光部Cのパルス幅はTsである。これにより、位置P4でのサブずれ量はほぼ0となる。
5.主走査方向における走査位置が位置P4と位置P5との中間近傍になると、図20(E)に示されるように発光部Cと発光部Dを走査用光源とする。このときの発光部C及び発光部Dのパルス幅はいずれもTsである。これにより、位置P5でのサブずれ量はほぼ0となる。
6.主走査方向における走査位置が位置P5と位置P6との中間近傍になると、図20(F)に示されるように発光部Cと発光部Dと発光部Eを走査用光源とする。このときの発光部C及び発光部Eのパルス幅はいずれも(1/2)Tsであり、発光部Dのパルス幅はTsである。これにより、位置P6でのサブずれ量はほぼ0となる。
7.主走査方向における走査位置が位置P6と位置P7との中間近傍になると、図21(A)に示されるように発光部Dと発光部Eを走査用光源とする。このときの発光部D及び発光部Eのパルス幅はいずれもTsである。これにより、位置P7でのサブずれ量はほぼ0となる。
8.主走査方向における走査位置が位置P7と位置P8との中間近傍になると、図21(B)に示されるように発光部Cと発光部Dと発光部Eを走査用光源とする。このときの発光部C及び発光部Eのパルス幅はいずれも(1/2)Tsであり、発光部Dのパルス幅はTsである。これにより、位置P8でのサブずれ量はほぼ0となる。
9.主走査方向における走査位置が位置P8と位置P9との中間近傍になると、図21(C)に示されるように発光部Cと発光部Dを走査用光源とする。このときの発光部C及び発光部Dのパルス幅はいずれもTsである。これにより、位置P9でのサブずれ量はほぼ0となる。
10.主走査方向における走査位置が位置P9と位置P10との中間近傍になると、図21(D)に示されるように発光部Bと発光部Cと発光部Dを走査用光源とする。このときの発光部B及び発光部Dのパルス幅はいずれも(1/2)Tsであり、発光部Cのパルス幅はTsである。これにより、位置P10でのサブずれ量はほぼ0となる。
11.主走査方向における走査位置が位置P10と位置P11との中間近傍になると、図21(D)に示されるように発光部Bと発光部Cを走査用光源とする。このときの発光部B及び発光部Cのパルス幅はいずれもTsである。これにより、位置P11でのサブずれ量はほぼ0となる。
このように、走査中に、副走査方向のずれ量に応じて、複数の発光部の中から2個及び3個のいずれかの発光部が走査用光源として選択され、駆動制御される。これにより、上記実施形態と同様に、全体的にサブずれ量が減少し、画像の品質が向上する。
なお、ライン2におけるサブずれ量も、同様にして補正することができる。
また、上記実施形態では、副走査方向のずれに対する補正量がL/32を単位とする場合について説明したが、本発明がこれに限定されるものではない。
また、上記実施形態では、9個の発光部がdir_sub方向に沿って一列に配列されている場合について説明したが、これに限らず、例えば図22に示されるように、いわゆる千鳥状に配置されていても良い。これにより、他の発光部に起因する温度上昇により発光特性が変化するいわゆる熱クロストークを減少させることができる。
また、前記半導体レーザLDに代えて、一例として図23に示されるように、複数の発光部が、dir_sub方向と、該dir_sub方向とは異なる方向であり、かつdir_sub方向に対して角度θ(0度<θ<90度)だけ傾斜した方向(本明細書では、便宜上、「α方向」ともいう)と、にそれぞれ沿って二次元的に配列されている半導体レーザを用いても良い。
また、前記半導体レーザLDに代えて、一例として図24に示されるように、複数の発光部が、dir_sub方向とdir_main方向とにそれぞれ沿ってマトリックス状に配置されている半導体レーザを回転させて用いても良い。ここで、例えば図25(A)に示されるように、画素1が発光部A3で形成され、画素2が発光部B2で形成され、画素3が発光部C1で形成され、画素4が発光部C4で形成されたときに、副走査方向における、画素1と画素2との間隔y12が前記Lより小さく、画素2と画素3との間隔y23がLとほぼ等しく、画素3と画素4との間隔y34がLより大きい場合には、図25(B)に示されるように、画素1を発光部A2で形成し、画素4を発光部C3で形成することにより、y12=y23=y34=Lとすることが可能である。
また、上記実施形態では、位置P1〜P11の11箇所でサブずれ量をほぼ0とする場合について説明したが、要求される精度によっては、図26に示されるように、位置P1、P3、P5、P7、P9及びP11の6箇所でサブずれ量がほぼ0となるように走査用光源を選択しても良い。また、さらに位置P1とP2との間、位置P2とP3との間、位置P3とP4との間、・・・・・・、などでサブずれ量がほぼ0となるように走査用光源を選択しても良い。
また、上記実施形態では、複数の発光部が走査用光源として選択されると、該選択された複数の発光部の各駆動信号におけるパルス幅をそれぞれ制御する場合について説明したが、これに限らず、例えば選択された複数の発光部の各発光パワーをそれぞれ制御しても良い。この場合においても、選択された複数の発光部からそれぞれ出射される光の光量の合計が予め設定された値と一致するように制御を行うことが好ましい。
また、上記実施形態において、各発光部のdir_sub方向に関する距離を、感光体ドラム901上に形成される潜像の位置精度に応じた距離としても良い。
また、上記実施形態において、ライン1におけるサブずれ量が+L/2を超えるときには、dir_sub方向において前記発光部Aの−側に新たな発光部を更に配置しても良い。同様に、ライン2におけるサブずれ量が−L/2を超えるときには、dir_sub方向において前記発光部Iの+側に新たな発光部を更に配置しても良い。
また、上記実施形態における処理回路815は一例であり、同様な処理を行う回路であれば、その回路構成は上記実施形態に限定されるものではない。
また、上記実施形態において、前記処理回路815を構成する回路の少なくとも一部が前記プリント基板802に実装されても良い。
また、カラー画像を形成する画像形成装置であっても、カラー画像に対応した光走査装置を用いることにより、高品質の画像を形成することが可能となる。この場合に、例えば、画像情報が、黄色に関する画像情報(以下、便宜上、「Y画像情報」という)と、マゼンダに関する画像情報(以下、便宜上、「M画像情報」という)と、シアンに関する画像情報(以下、便宜上、「C画像情報」という)と、黒色に関する画像情報(以下、便宜上、「K画像情報」という)とから構成されているときは、例えば図27(A)及び図27(B)に示されるように、各画像情報における副走査方向ずれの傾向をほぼ等しくすることができ、色ずれを抑制することができる。
また、画像形成装置として、カラー画像に対応し、画像情報毎に感光ドラムを備えるタンデムカラー機であっても良い。一例として図28に示されるタンデムカラー機には、Y画像情報用の感光ドラム901aにY画像情報の潜像を形成する光走査装置900aと、M画像情報用の感光ドラム901bにM画像情報の潜像を形成する光走査装置900bと、C画像情報用の感光ドラム901cにC画像情報の潜像を形成する光走査装置900cと、K画像情報用の感光ドラム901dにK画像情報の潜像を形成する光走査装置900dと、を有している。この場合には、上記実施形態と同様にして副走査方向ずれが補正され、高品質の画像を形成することが可能となる。
また、上記実施形態では、画像形成装置がレーザプリンタ100の場合について説明したが、これに限らず、例えば、光走査装置900を備えたデジタル複写機、スキャナ、ファクシミリ、及びいわゆる複合機であっても良い。要するに、光走査装置900を備えた画像形成装置であれば、高品質の画像を形成することが可能となる。
30…変調データ生成回路(制御手段)、100…レーザプリンタ(画像形成装置)、801…光源ユニット、900…光走査装置、901…感光体ドラム(走査対象物)、902…帯電チャージャ(転写手段の一部)、903…現像ローラ(転写手段の一部)、904…トナーカートリッジ(転写手段の一部)、909…定着ローラ(転写手段の一部)、911…転写チャージャ(転写手段の一部)、913…記録紙(転写対象物)。
Claims (8)
- 光源ユニットと、走査対象物に対して前記光源ユニットからの光を走査して前記走査対象物上に像を形成する光学系と、前記光源ユニットを制御する制御手段と、を有する光走査装置において、
前記光源ユニットは、副走査方向に対応する方向に配置された複数の光源を含み、
前記制御手段は、副走査方向のずれ量に応じて、前記複数の光源の中から、1以上の整数n個及びn+1個のいずれかの光源を走査用光源として選択して駆動制御することを特徴とする光走査装置。 - 前記制御手段は、前記走査用光源として複数の光源を選択し、該選択された複数の光源の各駆動信号におけるパルス幅をそれぞれ制御することを特徴とする請求項1に記載の光走査装置。
- 前記制御手段は、前記走査用光源として複数の光源を選択し、該選択された複数の光源の各発光パワーをそれぞれ制御することを特徴とする請求項1に記載の光走査装置。
- 前記選択された複数の光源からそれぞれ出射される光の光量の合計が予め設定された値と一致することを特徴とする請求項2又は3に記載の光走査装置。
- 前記副走査方向のずれ量に対する補正量は、主走査方向の位置毎に決定されることを特徴とする請求項1〜4のいずれか一項に記載の光走査装置。
- 前記補正量は、副走査方向のずれ量が0のときの隣接する走査ライン間の副走査方向の距離L及び2以上の整数mを用いて、L/mを単位とすることを特徴とする請求項5に記載の光走査装置。
- 前記複数の光源は、それぞれ同一チップ上に形成されていることを特徴とする請求項1〜6のいずれか一項に記載の光走査装置。
- 少なくとも1つの走査対象物と;
前記少なくとも1つの走査対象物に対して画像情報が含まれる光を走査し、前記走査対象物上に像を形成する少なくとも1つの請求項1〜7のいずれか一項に記載の光走査装置と;
前記走査対象物に形成された像を転写対象物に転写する転写手段と;を備える画像形成装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006190031A JP2007148346A (ja) | 2005-10-25 | 2006-07-11 | 光走査装置及び画像形成装置 |
| US11/512,122 US7515170B2 (en) | 2005-10-25 | 2006-08-30 | Optical scanner and image forming apparatus |
| EP06254547A EP1781008A1 (en) | 2005-10-25 | 2006-08-31 | Optical scanner and image forming apparatus |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005309248 | 2005-10-25 | ||
| JP2006190031A JP2007148346A (ja) | 2005-10-25 | 2006-07-11 | 光走査装置及び画像形成装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007148346A true JP2007148346A (ja) | 2007-06-14 |
Family
ID=37668159
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006190031A Pending JP2007148346A (ja) | 2005-10-25 | 2006-07-11 | 光走査装置及び画像形成装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7515170B2 (ja) |
| EP (1) | EP1781008A1 (ja) |
| JP (1) | JP2007148346A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012086466A (ja) * | 2010-10-20 | 2012-05-10 | Canon Inc | 画像形成装置 |
Families Citing this family (40)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007148346A (ja) | 2005-10-25 | 2007-06-14 | Ricoh Co Ltd | 光走査装置及び画像形成装置 |
| JP4790532B2 (ja) * | 2006-08-01 | 2011-10-12 | 株式会社リコー | 撮像装置及び無線通信相手検索方法 |
| JP4912071B2 (ja) * | 2006-08-04 | 2012-04-04 | 株式会社リコー | 光走査装置、光走査方法、画像形成装置、カラー画像形成装置、プログラム、記録媒体 |
| JP4863840B2 (ja) | 2006-10-27 | 2012-01-25 | 株式会社リコー | 画素形成装置、光走査装置、光走査方法、画像形成装置、カラー画像形成装置 |
| JP5083867B2 (ja) * | 2007-03-02 | 2012-11-28 | 株式会社リコー | 光源駆動装置、光走査装置及び画像形成装置 |
| US7995251B2 (en) * | 2007-03-30 | 2011-08-09 | Ricoh Company, Limited | Optical scanning device, optical scanning method, and image forming apparatus |
| US7903135B2 (en) * | 2007-04-26 | 2011-03-08 | Ricoh Company, Ltd. | Optical scanning device and image forming apparatus for optimizing arrangement intervals in a main-scanning direction and a sub-scanning direction |
| US7760223B2 (en) * | 2007-05-14 | 2010-07-20 | Ricoh Company, Ltd. | Optical scan apparatus and image formation apparatus |
| JP4953918B2 (ja) * | 2007-05-23 | 2012-06-13 | 株式会社リコー | 光源駆動装置、光走査装置及び画像形成装置 |
| JP5348601B2 (ja) * | 2007-05-28 | 2013-11-20 | 株式会社リコー | 光源装置、光走査装置及び画像形成装置 |
| JP2009157014A (ja) * | 2007-12-26 | 2009-07-16 | Ricoh Co Ltd | 光走査装置及び画像形成装置 |
| JP5194802B2 (ja) * | 2008-01-07 | 2013-05-08 | 株式会社リコー | 光源駆動装置、光走査装置及び画像形成装置 |
| JP5006810B2 (ja) * | 2008-02-06 | 2012-08-22 | 株式会社リコー | 光走査装置及び画像形成装置 |
| JP2009196226A (ja) | 2008-02-22 | 2009-09-03 | Ricoh Co Ltd | パルス変調信号生成装置、光源装置、光走査装置及び画像形成装置 |
| JP2009244843A (ja) * | 2008-03-14 | 2009-10-22 | Ricoh Co Ltd | 光走査装置およびカラー画像形成装置 |
| JP5036634B2 (ja) * | 2008-06-10 | 2012-09-26 | 株式会社リコー | 光源装置、光走査装置及び画像形成装置 |
| US8237760B2 (en) * | 2008-08-19 | 2012-08-07 | Ricoh Company, Ltd. | Light-source driving device, optical scanning device, and counting method |
| JP5402072B2 (ja) * | 2009-02-23 | 2014-01-29 | 株式会社リコー | 光源駆動装置、光走査装置及び画像形成装置 |
| JP2011066089A (ja) | 2009-09-15 | 2011-03-31 | Ricoh Co Ltd | 半導体レーザ制御装置及び画像形成装置 |
| JP5544887B2 (ja) | 2010-01-12 | 2014-07-09 | 株式会社リコー | 光走査装置及び画像形成装置 |
| JP5471569B2 (ja) * | 2010-02-18 | 2014-04-16 | 株式会社リコー | レーザ駆動装置、光走査装置、画像形成装置及びレーザ駆動方法 |
| JP2011216843A (ja) * | 2010-03-16 | 2011-10-27 | Ricoh Co Ltd | 半導体レーザ駆動装置、及びこれを含む画像形成装置 |
| JP2011258796A (ja) | 2010-06-10 | 2011-12-22 | Ricoh Co Ltd | レーザ駆動装置、光走査装置並びに画像形成装置 |
| US8771085B1 (en) | 2010-08-06 | 2014-07-08 | Arthur C. Clyde | Modular law enforcement baton |
| US8654168B2 (en) | 2011-08-03 | 2014-02-18 | Ricoh Company, Ltd. | Optical scanning device, image forming apparatus, and optical scanning device designing method |
| US8983318B2 (en) | 2012-03-16 | 2015-03-17 | Ricoh Company, Ltd. | Image forming apparatus with a density sensor for detecting density fluctuations |
| US8929759B2 (en) | 2012-05-10 | 2015-01-06 | Ricoh Company, Limited | Image forming apparatus and density change suppressing method |
| US9405211B2 (en) | 2012-11-21 | 2016-08-02 | Ricoh Company, Ltd. | Light source drive circuit, optical scanning apparatus, and image forming apparatus |
| US8928715B2 (en) | 2012-12-25 | 2015-01-06 | Ricoh Company, Ltd. | Light source driver, light source-driving method, image-forming apparatus, light source-driving circuit, and optical scanner |
| JP6236817B2 (ja) * | 2013-03-15 | 2017-11-29 | 株式会社リコー | 画像形成装置 |
| JP6172506B2 (ja) | 2013-05-02 | 2017-08-02 | 株式会社リコー | 画像形成装置及び画像形成方法 |
| JP6167654B2 (ja) | 2013-05-09 | 2017-07-26 | 株式会社リコー | 画像形成装置、画像形成方法および印刷物の製造方法 |
| JP6171547B2 (ja) | 2013-05-10 | 2017-08-02 | 株式会社リコー | 画像形成装置、画像形成方法および印刷物の製造方法 |
| JP6127712B2 (ja) | 2013-05-21 | 2017-05-17 | 株式会社リコー | 光源駆動回路、光走査装置及び画像形成装置 |
| JP6364971B2 (ja) | 2014-06-03 | 2018-08-01 | 株式会社リコー | 画像形成装置 |
| JP2016021664A (ja) | 2014-07-14 | 2016-02-04 | 株式会社リコー | 画像形成装置 |
| JP6596814B2 (ja) | 2014-11-25 | 2019-10-30 | 株式会社リコー | 画像形成装置 |
| JP6492722B2 (ja) | 2015-02-09 | 2019-04-03 | 株式会社リコー | 光源駆動制御装置、画像形成装置、光源駆動制御方法およびプログラム |
| US9659243B2 (en) | 2015-02-20 | 2017-05-23 | Ricoh Company, Ltd. | Image forming apparatus and method for driving light source |
| JP6524731B2 (ja) | 2015-03-17 | 2019-06-05 | 株式会社リコー | 画像形成装置及び画像形成方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5357106A (en) * | 1993-10-01 | 1994-10-18 | Xerox Corporation | Sensor for detecting beam position and start of scan position |
| JPH07174995A (ja) * | 1993-10-01 | 1995-07-14 | Xerox Corp | ラスター走査装置 |
| JP2003322811A (ja) * | 2002-03-01 | 2003-11-14 | Ricoh Co Ltd | 光走査装置および画像形成装置 |
| JP2005231327A (ja) * | 2004-02-23 | 2005-09-02 | Ricoh Co Ltd | ドット位置補正方法及びそれを適用した画像形成装置 |
| JP2005234510A (ja) * | 2004-02-23 | 2005-09-02 | Ricoh Co Ltd | 光走査装置、画像形成方法及び画像形成装置 |
| JP2006159647A (ja) * | 2004-12-07 | 2006-06-22 | Canon Inc | 画像形成装置及びその方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08321929A (ja) | 1995-05-25 | 1996-12-03 | Fuji Photo Film Co Ltd | 光走査記録装置 |
| JP3548463B2 (ja) | 1999-07-29 | 2004-07-28 | ペンタックス株式会社 | マルチビーム走査光学装置の同期信号検出方法及び検出装置 |
| JP2001272615A (ja) | 2000-03-24 | 2001-10-05 | Fuji Xerox Co Ltd | 光走査装置 |
| JP2001350111A (ja) | 2000-04-06 | 2001-12-21 | Ricoh Co Ltd | マルチビーム走査装置 |
| JP2003072135A (ja) | 2001-08-31 | 2003-03-12 | Canon Inc | 画像形成装置 |
| JP4175011B2 (ja) * | 2002-03-29 | 2008-11-05 | ブラザー工業株式会社 | 画像形成装置 |
| JP2007148346A (ja) | 2005-10-25 | 2007-06-14 | Ricoh Co Ltd | 光走査装置及び画像形成装置 |
-
2006
- 2006-07-11 JP JP2006190031A patent/JP2007148346A/ja active Pending
- 2006-08-30 US US11/512,122 patent/US7515170B2/en not_active Expired - Fee Related
- 2006-08-31 EP EP06254547A patent/EP1781008A1/en not_active Withdrawn
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5357106A (en) * | 1993-10-01 | 1994-10-18 | Xerox Corporation | Sensor for detecting beam position and start of scan position |
| JPH07174995A (ja) * | 1993-10-01 | 1995-07-14 | Xerox Corp | ラスター走査装置 |
| JP2003322811A (ja) * | 2002-03-01 | 2003-11-14 | Ricoh Co Ltd | 光走査装置および画像形成装置 |
| JP2005231327A (ja) * | 2004-02-23 | 2005-09-02 | Ricoh Co Ltd | ドット位置補正方法及びそれを適用した画像形成装置 |
| JP2005234510A (ja) * | 2004-02-23 | 2005-09-02 | Ricoh Co Ltd | 光走査装置、画像形成方法及び画像形成装置 |
| JP2006159647A (ja) * | 2004-12-07 | 2006-06-22 | Canon Inc | 画像形成装置及びその方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012086466A (ja) * | 2010-10-20 | 2012-05-10 | Canon Inc | 画像形成装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20070091163A1 (en) | 2007-04-26 |
| US7515170B2 (en) | 2009-04-07 |
| EP1781008A1 (en) | 2007-05-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2007148346A (ja) | 光走査装置及び画像形成装置 | |
| US8253768B2 (en) | Optical scanner and image forming apparatus | |
| US7995251B2 (en) | Optical scanning device, optical scanning method, and image forming apparatus | |
| JP4912071B2 (ja) | 光走査装置、光走査方法、画像形成装置、カラー画像形成装置、プログラム、記録媒体 | |
| JP4364010B2 (ja) | 画素クロック生成装置、光走査装置及び画像形成装置 | |
| JP2010096926A (ja) | 光走査装置および画像形成装置 | |
| JP4321764B2 (ja) | 光走査装置及び画像形成装置 | |
| JP4007807B2 (ja) | 光走査装置およびこれを用いた画像形成装置 | |
| JP5853414B2 (ja) | マルチビーム光源装置、光走査装置及び画像形成装置 | |
| JP2004109658A (ja) | 光走査装置及び光路調整方法並びに画像形成装置 | |
| JP2006198896A (ja) | 多色画像形成装置 | |
| JP4859091B2 (ja) | 光走査装置及び画像形成装置 | |
| JP2007160508A (ja) | 光走査装置及び画像形成装置 | |
| JP2009069270A (ja) | 光走査装置及び画像形成装置 | |
| JP2007114518A (ja) | 光走査装置、画像形成装置及び副走査位置補正方法 | |
| JP4662250B2 (ja) | 光走査装置及び画像形成装置 | |
| JP2010000720A (ja) | 画像調整方法 | |
| JP2005231327A (ja) | ドット位置補正方法及びそれを適用した画像形成装置 | |
| JP4662264B2 (ja) | 光走査装置及び画像形成装置 | |
| JP2011002499A (ja) | マルチビーム走査装置及び画像形成装置 | |
| JP5240645B2 (ja) | 光走査装置、光走査方法、画像形成装置、カラー画像形成装置、プログラム、記録媒体 | |
| JP2007047644A (ja) | 光走査装置及び画像形成装置 | |
| JP5505594B2 (ja) | 光走査装置及び画像形成装置 | |
| JP2006116716A (ja) | 光走査装置、光走査装置の画素クロック生成方法および画像形成装置 | |
| JP2008026434A (ja) | 光走査装置、光走査方法、画像形成装置、カラー画像形成装置、プログラム、記録媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090409 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110214 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120328 |