JP2005123583A - 基板ホルダ内に基板支持体をローディングするための方法およびシステム - Google Patents
基板ホルダ内に基板支持体をローディングするための方法およびシステム Download PDFInfo
- Publication number
- JP2005123583A JP2005123583A JP2004239311A JP2004239311A JP2005123583A JP 2005123583 A JP2005123583 A JP 2005123583A JP 2004239311 A JP2004239311 A JP 2004239311A JP 2004239311 A JP2004239311 A JP 2004239311A JP 2005123583 A JP2005123583 A JP 2005123583A
- Authority
- JP
- Japan
- Prior art keywords
- wafer
- support
- substrate
- end effector
- wafer support
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/28—Testing of electronic circuits, e.g. by signal tracer
- G01R31/2851—Testing of integrated circuits [IC]
- G01R31/2893—Handling, conveying or loading, e.g. belts, boats, vacuum fingers
Landscapes
- Engineering & Computer Science (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
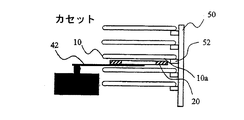
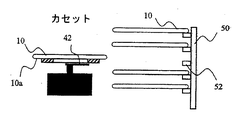
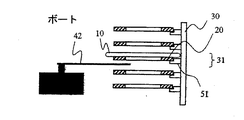
【解決手段】ウエハ支持体の周囲は、好ましくは、連続して360°の範囲にわたり完全に延び、ウエハカセット内の特定のウエハを支持する突出部間にはまるように寸法決定される。ウエハボートをローディングするために、エンドエフェクタが、ウエハボートからウエハ支持体を取り除き、ウエハカセット内にウエハ支持体を移動し、ウエハカセットで、エンドエフェクタが、ウエハ支持体上にウエハを置くように上方へ移動する。ウエハおよびウエハ支持体は、次に、ウエハボートに移送され、ウエハおよびウエハ支持体は、エンドエフェクタからウエハボートへウエハおよびウエハ支持体を移送するために、ウエハボート内のウエハスロット内のウエハスロット表面上に低下される。
【選択図】図1
Description
10a 底
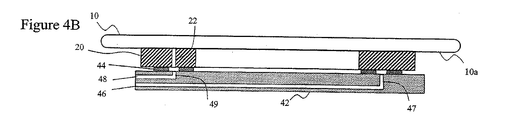
20 ウエハ支持体
22 通路
30 ウエハ支持体、ウエハボート
31 ウエハスロット
40 ロボット
42 エンドエフェクタ
44 接点パッド
46、48 水平方向チャネル
47、49 垂直方向チャネル
50 カセット
51 ボートシェルフ
52 ウエハカセット突出部、支持体シェルフ
60 部分
Claims (61)
- ウエハボート内にウエハをローディングする方法であって、
ウエハカセット内に前記ウエハを提供することと、
ウエハ支持体ホルダ内にウエハ支持体を提供することと、
ウエハ支持体を取り除くために、前記ウエハ支持体ホルダ内にロボットエンドエフェクタを挿入することとを含み、前記ウエハ支持体は前記ロボットエンドエフェクタに載置し、方法がさらに、
前記ウエハ支持体を、前記ロボットエンドエフェクタを用いて、前記ウエハカセット内の前記ウエハの下に配置することを含み、前記ウエハ支持体が、前記ウエハと平行でありかつ前記ウエハと同軸に整列され、方法がさらに、
前記ウエハを前記ウエハ支持体上または前記エンドエフェクタ上に置くために、前記ウエハカセットに対して前記ロボットエンドエフェクタを垂直方向に移動することと、
前記ウエハ支持体および前記ウエハを保持している間、前記ロボットエンドエフェクタを前記ウエハボートに移送することと、
前記ウエハ支持体を前記ウエハボートの収容器上に配置するために、前記ウエハボートに対して前記ロボットエンドエフェクタを垂直方向に移動することとを含み、前記ウエハが、前記ウエハ支持体上に載置される方法。 - 前記ウエハ支持体が、空の中心、および前記ウエハが前記ウエハカセット内に支持されている間に支持されていない、前記ウエハの底部主表面の部分の直径より小さい外径を有する環状リングである請求項1に記載の方法。
- 前記ウエハ支持体ホルダが、前記ウエアボートである請求項1に記載の方法。
- 前記ウエハカセットに対して前記ロボットエンドエフェクタを垂直方向に移動することが、前記ウエハカセットが静止している間に、前記エンドエフェクタを上方に移動することを含む請求項1に記載の方法。
- 前記ウエハボートに対して前記エンドエフェクタを垂直方向に移動することが、前記ウエハカセットが静止している間に、前記エンドエフェクタを下方に移動することを含む請求項1に記載の方法。
- 前記ウエハ支持体を保持している間、前記ロボットエンドエフェクタを移送することが、前記エンドエフェクタから前記ウエハ支持体の底部表面に真空を加えることを含む請求項1に記載の方法。
- 前記ウエハ支持体の前記底部主表面に真空を加えることが、前記ウエハ支持体におけるチャネルを通して真空を生成することを含む請求項6に記載の方法。
- 前記ウエハ支持体の前記底部主表面に真空を加えることが、前記ウエハおよび前記ウエハ支持体の境界に真空吸着を発生するために、前記ウエハ支持体におけるチャネルを通して真空を生成することを含む請求項6に記載の方法。
- 前記ウエハの前記底部主表面に真空を加えることが、前記ウエハ支持体の開口部分を通して延びる前記ウエハおよび前記エフェクタ部分の境界に真空を生成することを含む請求項6に記載の方法。
- 前記ウエハ支持体が、環状リングであり、開口部分が、前記リングの空の中心である請求項9に記載の方法。
- 前記ロボットエンドエフェクタを用いて前記ウエハ支持体を配置する間、および前記ロボットエンドエフェクタを移送する間に、前記ウエハ支持体および/または前記ウエハの移動が、前記エンドエフェクタの制限された加速を適用することによって妨げられる請求項1に記載の方法。
- 滑動に対して高い抵抗を有する材料が、前記ウエハ支持体と前記エンドエフェクタとの間の境界に配置される請求項1に記載の方法。
- 前記材料が、ハプティック材料である請求項12に記載の方法。
- 前記ウエハ支持体が、前記ウエハ支持体および前記ウエハを保持しながら、前記ロボットエンドエフェクタを移送する間に、前記エンドエフェクタに静電的にクランプされる請求項1に記載の方法。
- 前記ウエハ支持体および前記ウエハを保持しながら、前記ロボットエンドエフェクタを前記ウエハボートに移送することが、前記ウエハ支持体上に前記ウエハを支持することを含む請求項1に記載の方法。
- 前記ウエハ支持体および前記ウエハを保持しながら、前記ロボットエンドエフェクタを前記ウエハボートに移送することが、前記エンドエフェクタ上に前記ウエハを支持することを含む請求項1に記載の方法。
- 前記ウエハ支持体を前記ウエハボートの収容器上に配置するために、前記ウエハボートに対して前記ロボットエンドエフェクタを垂直方向に移動することが、第1に、前記ウエハボートの収容器の表面上に前記ウエハ支持体を置くことと、第2に、前記ウエハ支持体上に前記ウエハを置くこととを含む請求項1に記載の方法。
- ウエハボート内にウエハをローディングするシステムであって、
エンドエフェクタの上方表面に真空を発生するための開口を有するエンドエフェクタと、
前記上方表面開口と整列するように構成された通路を有するウエハ支持体と、
前記エンドエフェクタ上に前記ウエハ支持体を保持するとき、および前記ウエハ支持体上に前記ウエハを保持するときに、前記通路が、前記ウエハ支持体と前記ウエハとの境界で真空吸着を発生するように構成されるシステム。 - 前記ウエハ支持体が、円形形状を有する請求項18に記載のシステム。
- 前記エンドエフェクタが、さらに前記ウエハ支持体と接触するために前記上方表面にパッドを備える請求項18に記載のシステム。
- 前記パッドが、粒子を発生しない材料からなる請求項20に記載のシステム。
- 前記材料が、ポリテトラフルオロエチレンからなる請求項21に記載のシステム。
- 前記材料が、ポリ・エーテル・エーテル・ケトンからなる請求項21に記載のシステム。
- さらに、少なくとも1つのウエハを保持するウエハカセットを備える請求項18に記載のシステム。
- 前記ウエハ支持体が、連続する外周を有する請求項24に記載のシステム。
- さらに、ウエハ支持体を格納するウエハ支持体ホルダを備える請求項18に記載のシステム。
- 前記ウエハ支持体ホルダが、ウエハボートである請求項26に記載のシステム。
- 半導体プロセッシングのために基板ホルダ内に複数の基板をローディングする方法であって、
基板縁部支持構造体上に載置する基板を提供することと、
エンドエフェクタ上に置かれた基板支持体を提供することと、
前記基板の下に前記基板支持体を配置することと、
前記基板を前記基板支持体に接触させ、かつ前記基板を前記基板支持体上に置くように、前記エンドエフェクタを上方へ移動することと、
前記基板および前記エンドエフェクタ上に置かれた前記基板支持体を、前記基板ホルダ内に配置するために、前記エンドエフェクタを移送することと、
基板支持体を前記基板ホルダ内で支持するために、前記基板支持体を支持表面上に置くように、前記エンドエフェクタを下方へ移動することとを含む方法。 - 前記基板支持体が、環状リングである請求項28に記載の方法。
- 前記基板が、前記基板支持体ホルダ内の前記基板支持体上に置かれている間に、前記基板に半導体製造プロセスを受けさせることをさらに含む請求項28に記載の方法。
- 前記基板に半導体製造プロセスを受けさせることが、約1000°以上の温度に前記基板を曝すことを含む請求項30に記載の方法。
- 前記基板に半導体製造プロセスを受けさせることが、約1350°以上の温度に前記基板を曝すことを含む請求項30に記載の方法。
- 1つ以上の基板カセットから基板ホルダ内へ基板のバッチをローディングする方法であって、
前記基板カセット内の基板の支持されていない領域の最も小さい寸法より小さい外側寸法を有する基板支持体を提供するステップと、
前記基板支持体が、前記基板に平行でありかつ前記基板の支持されていない領域と整列されるように、基板支持体を保持するロボットエンドエフェクタを、前記基板カセット内の基板の下の位置に移送するステップと、
前記基板が、前記基板支持体上または前記エンドエフェクタ上に置かれるまで、前記ロボットエンドエフェクタを上方向に垂直方向に移動するステップと、
前記基板支持体および前記基板を有する前記ロボットエンドエフェクタを、前記基板ホルダへ移送するステップと、
前記基板とともに前記基板支持体を、前記基板ホルダの収容器内へ配置するステップとを含む方法。 - 約1000°以上の温度での熱処理に前記基板を受けさせることをさらに含む請求項33に記載の方法。
- 前記基板支持体および前記基板を有する前記ロボットエンドエフェクタを移送することが、前記ロボットエンドエフェクタから前記基板に対して真空吸着を提供することを含む請求項33に記載の方法。
- 前記ロボットエンドエフェクタから前記基板ホルダに対して真空吸着を提供することをさらに含む請求項35に記載の方法。
- 前記基板ホルダに対する吸着、および前記基板に対する吸着を個別に変えることをさらに含む請求項36に記載の方法。
- 前記エンドエフェクタが、前記ロボットエンドエフェクタを移送する間に、前記基板を前記基板支持体上で保持するために、前記基板支持体を通して延びるように構成された上方延長部を備える請求項33に記載の方法。
- 半導体プロセッシングの間にウエハを支持するウエハ支持体であって、
実質的に平坦な底部主表面と、
前記底部主表面と平行な実質的に平坦な頂部主表面と、
前記頂部および底部主表面を接続する連続外側側壁とを備え、前記頂部および底部表面の最長寸法は、前記ウエハを格納するためのカセット内に前記ウエハを支持するために、端部支持体と同平面および端部支持体の同平面間にはまるように、ウエハ支持体が寸法決定され、前記頂部および底部表面の最長寸法は、プロセッシングの間にウエハボート内に前記ウエハ支持体を保持するために、1つ以上の水平方向延長部上に置くようにウエハ支持体が寸法決定されるウエハ支持体。 - 前記側壁が、円を画定する請求項39に記載のウエハ支持体。
- 前記ウエハ支持体の中央に開口をさらに備える請求項40に記載のウエハ支持体。
- 前記開口が、円形である請求項41に記載のウエハ支持体。
- 前記外側側壁から挿入されたガス通路をさらに備え、前記ガス通路が、前記頂部主表面から前記底部主表面へ延びる請求項40に記載のウエハ支持体。
- 前記ガス通路が、前記ウエハ支持体を、前記ウエハカセットおよび前記ウエハボート内に、および前記ウエハカセットおよび前記ウエハボート外へ移送するために、エンドエフェクタ上でガスチャネルと整列するように配置される請求項43に記載のウエハ支持体。
- 前記最長寸法が、約280mmより短い請求項39に記載のウエハ支持体。
- 前記ウエハが、300mmウエハである請求項45に記載のウエハ支持体。
- 前記縁部支持体の内縁が、約290mmより短い直径を有する円の範囲を定める請求項45に記載のウエハ支持体。
- ウエハボート内に半導体ウエハをローディングするシステムであって、
覆う対象物との境界に真空吸着を発生するように構成されたガスチャネルを有するエンドエフェクタと、
半導体プロセッシングの間に覆うウエハを、エンドエフェクタ上に置きかつ支持するように構成されるウエハ支持体とを備え、
前記ウエハ支持体が、ウエハ移送カセット内の前記ウエハを支持する縁部支持体と同平面にかつ縁部支持体間にはまるように寸法決定されるシステム。 - さらにウエハボートを備え、前記ウエハ支持体が、半導体プロセッシングの間、前記ウエハボートの収容器内の前記ウエハを支持し、前記ウエハ支持体が、プロセッシングの間に前記ウエハボート内の前記ウエハ支持体を保持するために、1つ以上の水平方向延長部上に置くように寸法決定される請求項48に記載のシステム。
- 前記ウエハ支持体が、前記ガスチャネルに整列するように構成された通路を備え、前記通路が、前記エンドエフェクタ上に前記ウエハ支持体を保持するとき、および前記ウエハ支持体上に前記ウエハを保持するときに、前記通路が、前記ウエハ支持体と前記ウエハとの境界で真空吸着を発生するように構成される請求項48に記載のシステム。
- 前記覆う対象物が、前記ウエハ支持体であり、前記チャネルが、前記エンドエフェクタと前記ウエハ支持体との境界で真空吸着を生成するように構成される請求項48に記載のシステム。
- 前記ウエハ支持体が、円形形状である請求項48に記載のシステム。
- 前記ウエハ支持体が、空の中心を有する環状リングである請求項52に記載のシステム。
- 前記エンドエフェクタが、前記ウエハの底部表面に接触するために、前記空の中心を通って延びるように寸法決定されかつ配置される上方に延びる部分をさらに備える請求項53に記載のシステム。
- 前記上方に延びる部分が、前記上方の延びる部分と前記底部表面との間に真空吸着を発生するために開口するチャネルを有する請求項54に記載のシステム。
- 前記上方に延びる部分が、前記ウエハ支持体上のレベルで前記ウエハを支持する請求項55に記載のシステム。
- 前記ウエハ支持体とのエンドエフェクタ境界に開口を有する、他の独立して制御可能なガスチャネルをさらに備え、前記他のガスチャネルが、前記エンドエフェクタ境界で真空を発生するように構成される請求項55に記載のシステム。
- 前記上方に延びる部分が、前記底部表面と接触するパッドをさらに備える請求項54に記載のシステム。
- 前記パッドが、粒子を発生しない材料からなる請求項58に記載のシステム。
- 前記材料が、ポリテトラフルオロエチレンからなる請求項59に記載のシステム。
- 前記材料が、ポリ・エーテル・エーテル・ケトンからなる請求項60に記載のシステム。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US49689803P | 2003-08-20 | 2003-08-20 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005123583A true JP2005123583A (ja) | 2005-05-12 |
| JP2005123583A5 JP2005123583A5 (ja) | 2007-09-20 |
Family
ID=34619290
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004239311A Pending JP2005123583A (ja) | 2003-08-20 | 2004-08-19 | 基板ホルダ内に基板支持体をローディングするための方法およびシステム |
Country Status (2)
| Country | Link |
|---|---|
| US (2) | US7181132B2 (ja) |
| JP (1) | JP2005123583A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007008698A (ja) * | 2005-07-01 | 2007-01-18 | Ishikawajima Harima Heavy Ind Co Ltd | 基板吸着方法、基板ホルダ及び基板吸着装置 |
| WO2016117095A1 (ja) * | 2015-01-22 | 2016-07-28 | 株式会社島津製作所 | 基板移載システム |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7727588B2 (en) * | 2003-09-05 | 2010-06-01 | Yield Engineering Systems, Inc. | Apparatus for the efficient coating of substrates |
| EP1790757B1 (en) * | 2004-07-22 | 2013-08-14 | Toyo Tanso Co., Ltd. | Susceptor |
| KR100946994B1 (ko) * | 2005-10-04 | 2010-03-10 | 가부시키가이샤 히다치 고쿠사이 덴키 | 기판 처리 장치 및 반도체 장치의 제조 방법 |
| US7576653B2 (en) * | 2006-03-15 | 2009-08-18 | Angel Secure Networks, Inc. | Secure panel with remotely controlled embedded devices |
| JP4313401B2 (ja) * | 2007-04-24 | 2009-08-12 | 東京エレクトロン株式会社 | 縦型熱処理装置及び被処理基板移載方法 |
| US8344885B2 (en) * | 2008-01-22 | 2013-01-01 | Angel Secure Networks Inc. | Container with interior enclosure of composite material having embedded security element |
| KR20110007434A (ko) * | 2009-07-16 | 2011-01-24 | 주식회사 아이피에스 | 반도체 제조 장치 |
| EP2360720A1 (de) * | 2010-02-23 | 2011-08-24 | Saint-Gobain Glass France | Vorrichtung zum Positionieren von mindestens zwei Gegenständen, Anordnungen, insbesondere Mehrschichtkörperanordnungen, Anlage zum Prozessieren, insbesondere zum Selenisieren, von Gegenständen, Verfahren zum Positionieren von mindestens zwei Gegenständen |
| JP2012151433A (ja) * | 2010-12-28 | 2012-08-09 | Tokyo Electron Ltd | 熱処理装置 |
| JP5243569B2 (ja) * | 2011-03-07 | 2013-07-24 | 東京エレクトロン株式会社 | 基板搬送装置、基板搬送方法及びその基板搬送方法を実行させるためのプログラムを記録した記録媒体 |
| JP5797176B2 (ja) * | 2012-09-14 | 2015-10-21 | 東京エレクトロン株式会社 | スペーサ、スペーサの搬送方法、処理方法、及び、処理装置 |
| DE102016113924B4 (de) | 2016-07-28 | 2024-06-13 | Infineon Technologies Ag | Waferbox und Verfahren zum Anordnen von Wafern in einer Waferbox |
| US11247309B2 (en) * | 2018-03-19 | 2022-02-15 | Tokyo Electron Limited | Substrate holding apparatus and method for shape metrology |
| NL2022185B1 (nl) * | 2018-12-12 | 2020-07-02 | Suss Microtec Lithography Gmbh | Substratkassette |
| CN110673019A (zh) * | 2018-12-19 | 2020-01-10 | 上海华力微电子有限公司 | 一种晶圆级自动测试系统 |
| CN112786500A (zh) * | 2019-11-11 | 2021-05-11 | 夏泰鑫半导体(青岛)有限公司 | 晶圆架及具有晶圆架的垂直晶舟 |
| CN113707586B (zh) * | 2021-08-30 | 2024-04-16 | 北京北方华创微电子装备有限公司 | 半导体工艺设备及其片舟存储装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10242237A (ja) * | 1997-02-27 | 1998-09-11 | Nec Yamagata Ltd | ウエハ移載装置および移載方法 |
| JP2003031647A (ja) * | 2001-07-19 | 2003-01-31 | Hitachi Kokusai Electric Inc | 基板処理装置および半導体装置の製造方法 |
| JP2003209153A (ja) * | 2002-01-11 | 2003-07-25 | Hitachi Kokusai Electric Inc | 基板処理装置、及び半導体デバイスの製造方法 |
| JP2003282388A (ja) * | 2002-03-26 | 2003-10-03 | Hitachi Kokusai Electric Inc | 基板処理装置、及び半導体装置の製造方法 |
Family Cites Families (117)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AT219865B (de) | 1960-05-17 | 1962-02-26 | Plansee Metallwerk | Suszeptor aus hochschmelzenden Metallen für Induktionsöfen und Verfahren zu dessen Herstellung |
| US3466079A (en) | 1965-09-08 | 1969-09-09 | Western Electric Co | Pressurized fluid pickup device |
| US3523706A (en) | 1967-10-27 | 1970-08-11 | Ibm | Apparatus for supporting articles without structural contact and for positioning the supported articles |
| US3972704A (en) | 1971-04-19 | 1976-08-03 | Sherwood Refractories, Inc. | Apparatus for making vitreous silica receptacles |
| US3947236A (en) | 1971-11-29 | 1976-03-30 | Lasch Jr Cecil A | Fluid bearing transfer and heat treating apparatus and method |
| US4322592A (en) | 1980-08-22 | 1982-03-30 | Rca Corporation | Susceptor for heating semiconductor substrates |
| US4348044A (en) | 1980-10-10 | 1982-09-07 | Cincinnati Milacron Inc. | Article gripping apparatus |
| NL8103979A (nl) | 1981-08-26 | 1983-03-16 | Bok Edward | Methode en inrichting voor het aanbrengen van een film vloeibaar medium op een substraat. |
| US4468259A (en) | 1981-12-04 | 1984-08-28 | Ushio Denki Kabushiki Kaisha | Uniform wafer heating by controlling light source and circumferential heating of wafer |
| US4407654A (en) | 1982-01-21 | 1983-10-04 | The Potters Supply Company | Handling and support system for kiln fired ware |
| NL8203318A (nl) | 1982-08-24 | 1984-03-16 | Integrated Automation | Inrichting voor processing van substraten. |
| JPS6074626A (ja) | 1983-09-30 | 1985-04-26 | Fujitsu Ltd | ウエハー処理方法及び装置 |
| US4563558A (en) | 1983-12-27 | 1986-01-07 | United Technologies Corporation | Directional recrystallization furnace providing convex isotherm temperature distribution |
| US4586743A (en) | 1984-09-24 | 1986-05-06 | Intelledex Incorporated | Robotic gripper for disk-shaped objects |
| FR2596070A1 (fr) | 1986-03-21 | 1987-09-25 | Labo Electronique Physique | Dispositif comprenant un suscepteur plan tournant parallelement a un plan de reference autour d'un axe perpendiculaire a ce plan |
| JPS62222625A (ja) | 1986-03-25 | 1987-09-30 | Shimizu Constr Co Ltd | 半導体製造装置 |
| US4770590A (en) | 1986-05-16 | 1988-09-13 | Silicon Valley Group, Inc. | Method and apparatus for transferring wafers between cassettes and a boat |
| JPS63102225A (ja) | 1986-10-20 | 1988-05-07 | Deisuko Haitetsuku:Kk | 縦形半導体熱処理装置のウエ−ハボ−ト |
| JPS6387831U (ja) | 1986-11-26 | 1988-06-08 | ||
| US4781411A (en) | 1987-04-23 | 1988-11-01 | Kolb James A | Portable sun shield |
| US4773687A (en) | 1987-05-22 | 1988-09-27 | American Telephone And Telegraph Company, At&T Technologies, Inc. | Wafer handler |
| GB8714175D0 (en) | 1987-06-17 | 1987-07-22 | Dynapert Precima Ltd | Suction pick-up apparatus |
| JPH0617295Y2 (ja) | 1987-11-27 | 1994-05-02 | 大日本スクリーン製造株式会社 | 基板受け渡し装置 |
| KR900006017B1 (ko) | 1987-12-18 | 1990-08-20 | 한국전기통신공사 | 가변직경형 웨이퍼운송장치 |
| US4978567A (en) | 1988-03-31 | 1990-12-18 | Materials Technology Corporation, Subsidiary Of The Carbon/Graphite Group, Inc. | Wafer holding fixture for chemical reaction processes in rapid thermal processing equipment and method for making same |
| US4900214A (en) | 1988-05-25 | 1990-02-13 | American Telephone And Telegraph Company | Method and apparatus for transporting semiconductor wafers |
| US4913481A (en) | 1988-09-13 | 1990-04-03 | Applied Power Inc. | Clean room gripper |
| JP2683675B2 (ja) | 1989-01-26 | 1997-12-03 | 東京エレクトロン株式会社 | 搬送装置 |
| US5022695A (en) | 1989-01-30 | 1991-06-11 | Texas Instruments Incorporated | Semiconductor slice holder |
| DE3919611A1 (de) | 1989-06-15 | 1990-12-20 | Wacker Chemitronic | Haltevorrichtung zur aufnahme von scheibenfoermigen gegenstaenden, insbesondere halbleiterscheiben, und verfahren zu deren behandlung |
| EP0405301B1 (en) | 1989-06-29 | 1995-08-30 | Applied Materials, Inc. | Apparatus for handling semiconductor wafers |
| US5110248A (en) | 1989-07-17 | 1992-05-05 | Tokyo Electron Sagami Limited | Vertical heat-treatment apparatus having a wafer transfer mechanism |
| US5162047A (en) | 1989-08-28 | 1992-11-10 | Tokyo Electron Sagami Limited | Vertical heat treatment apparatus having wafer transfer mechanism and method for transferring wafers |
| CH680275A5 (ja) | 1990-03-05 | 1992-07-31 | Tet Techno Investment Trust | |
| KR0153250B1 (ko) | 1990-06-28 | 1998-12-01 | 카자마 겐쥬 | 종형 열처리 장치 |
| US5071485A (en) * | 1990-09-11 | 1991-12-10 | Fusion Systems Corporation | Method for photoresist stripping using reverse flow |
| US5310339A (en) | 1990-09-26 | 1994-05-10 | Tokyo Electron Limited | Heat treatment apparatus having a wafer boat |
| JPH081922B2 (ja) | 1991-01-25 | 1996-01-10 | 株式会社東芝 | ウェハ−保持装置 |
| US5192371A (en) | 1991-05-21 | 1993-03-09 | Asm Japan K.K. | Substrate supporting apparatus for a CVD apparatus |
| JPH05102056A (ja) | 1991-10-11 | 1993-04-23 | Rohm Co Ltd | ウエハー支持具 |
| JP3234617B2 (ja) | 1991-12-16 | 2001-12-04 | 東京エレクトロン株式会社 | 熱処理装置用基板支持具 |
| NL9200446A (nl) | 1992-03-10 | 1993-10-01 | Tempress B V | Inrichting voor het behandelen van microschakeling-schijven (wafers). |
| US5445486A (en) | 1992-03-29 | 1995-08-29 | Tokyo Electron Sagami Limited | Substrate transferring apparatus |
| JP3100252B2 (ja) | 1992-05-26 | 2000-10-16 | 東京エレクトロン株式会社 | 被処理体用ボート及びそれを用いた被処理体の移し換え方法ならびに熱処理装置 |
| US5788425A (en) | 1992-07-15 | 1998-08-04 | Imation Corp. | Flexible system for handling articles |
| US5492229A (en) | 1992-11-27 | 1996-02-20 | Toshiba Ceramics Co., Ltd. | Vertical boat and a method for making the same |
| JP3125199B2 (ja) | 1993-03-18 | 2001-01-15 | 東京エレクトロン株式会社 | 縦型熱処理装置 |
| JP3348936B2 (ja) | 1993-10-21 | 2002-11-20 | 東京エレクトロン株式会社 | 縦型熱処理装置 |
| DE69402918T2 (de) | 1993-07-15 | 1997-08-14 | Applied Materials Inc | Substratfangvorrichtung und Keramikblatt für Halbleiterbearbeitungseinrichtung |
| US5592581A (en) | 1993-07-19 | 1997-01-07 | Tokyo Electron Kabushiki Kaisha | Heat treatment apparatus |
| US5556275A (en) | 1993-09-30 | 1996-09-17 | Tokyo Electron Limited | Heat treatment apparatus |
| AT640U1 (de) | 1993-10-22 | 1996-02-26 | Sez Semiconduct Equip Zubehoer | Greifer für halbleiterwafer und andere scheibenförmige gegenstände |
| US5565034A (en) | 1993-10-29 | 1996-10-15 | Tokyo Electron Limited | Apparatus for processing substrates having a film formed on a surface of the substrate |
| FI97731C (fi) | 1994-11-28 | 1997-02-10 | Mikrokemia Oy | Menetelmä ja laite ohutkalvojen valmistamiseksi |
| DE59611078D1 (de) | 1995-03-28 | 2004-10-14 | Brooks Automation Gmbh | Be- und Entladestation für Halbleiterbearbeitungsanlagen |
| US5692873A (en) | 1995-03-31 | 1997-12-02 | Motorola, Inc. | Apparatus for holding a piece of semiconductor |
| CN1079577C (zh) | 1995-05-05 | 2002-02-20 | 圣戈本陶瓷及塑料股份有限公司 | 半导体晶圆片用的竖直支架 |
| JP3218164B2 (ja) | 1995-05-31 | 2001-10-15 | 東京エレクトロン株式会社 | 被処理体の支持ボート、熱処理装置及び熱処理方法 |
| US5664925A (en) | 1995-07-06 | 1997-09-09 | Brooks Automation, Inc. | Batchloader for load lock |
| JPH0992625A (ja) | 1995-09-20 | 1997-04-04 | Tokyo Electron Ltd | 熱処理用ボ−ト |
| SE9503426D0 (sv) | 1995-10-04 | 1995-10-04 | Abb Research Ltd | A device for heat treatment of objects and a method for producing a susceptor |
| WO1997017728A1 (fr) | 1995-11-06 | 1997-05-15 | Tokyo Electron Limited | Dispositif de transfert, procede de transfert, dispositif de traitement et procede de traitement |
| US5746460A (en) | 1995-12-08 | 1998-05-05 | Applied Materials, Inc. | End effector for semiconductor wafer transfer device and method of moving a wafer with an end effector |
| KR0165350B1 (ko) | 1995-12-13 | 1999-02-18 | 김광호 | 반도체웨이퍼 공급장치 |
| TW321192U (en) | 1995-12-23 | 1997-11-21 | Samsung Electronics Co Ltd | A arm of robot for transporting semiconductor wafer |
| WO1997031389A1 (fr) | 1996-02-23 | 1997-08-28 | Tokyo Electron Limited | Dispositif de traitement thermique |
| SE9600705D0 (sv) | 1996-02-26 | 1996-02-26 | Abb Research Ltd | A susceptor for a device for epitaxially growing objects and such a device |
| EP0884769A1 (en) | 1996-02-29 | 1998-12-16 | Tokyo Electron Limited | Heat-treating boat for semiconductor wafer |
| JPH09306980A (ja) | 1996-05-17 | 1997-11-28 | Asahi Glass Co Ltd | 縦型ウエハボート |
| US5788453A (en) | 1996-05-30 | 1998-08-04 | Applied Materials, Inc. | Piezoelectric wafer gripping system for robot blades |
| US5851041A (en) | 1996-06-26 | 1998-12-22 | Ontrak Systems, Inc. | Wafer holder with spindle assembly and wafer holder actuator |
| JP2772283B2 (ja) | 1996-07-16 | 1998-07-02 | 山形日本電気株式会社 | 真空吸着ピンセットおよびその吸着方法 |
| US5848889A (en) | 1996-07-24 | 1998-12-15 | Applied Materials Inc. | Semiconductor wafer support with graded thermal mass |
| JPH1074818A (ja) | 1996-09-02 | 1998-03-17 | Tokyo Electron Ltd | 処理装置 |
| US6183183B1 (en) | 1997-01-16 | 2001-02-06 | Asm America, Inc. | Dual arm linear hand-off wafer transfer assembly |
| US5983906A (en) | 1997-01-24 | 1999-11-16 | Applied Materials, Inc. | Methods and apparatus for a cleaning process in a high temperature, corrosive, plasma environment |
| JPH10233426A (ja) | 1997-02-20 | 1998-09-02 | Tokyo Electron Ltd | 自動ティ−チング方法 |
| NL1005410C2 (nl) | 1997-02-28 | 1998-08-31 | Advanced Semiconductor Mat | Stelsel voor het laden, behandelen en ontladen van op een drager aangebrachte substraten. |
| US5879459A (en) | 1997-08-29 | 1999-03-09 | Genus, Inc. | Vertically-stacked process reactor and cluster tool system for atomic layer deposition |
| TW401582B (en) | 1997-05-15 | 2000-08-11 | Tokyo Electorn Limtied | Apparatus for and method of transferring substrates |
| AT405701B (de) | 1997-06-18 | 1999-11-25 | Sez Semiconduct Equip Zubehoer | Greifer für halbleiterwafer und andere scheibenförmige gegenstände |
| US5839770A (en) | 1997-06-26 | 1998-11-24 | Zaytran, Inc. | Robotic gripper |
| US6034000A (en) | 1997-07-28 | 2000-03-07 | Applied Materials, Inc. | Multiple loadlock system |
| US6321680B2 (en) | 1997-08-11 | 2001-11-27 | Torrex Equipment Corporation | Vertical plasma enhanced process apparatus and method |
| US6068441A (en) | 1997-11-21 | 2000-05-30 | Asm America, Inc. | Substrate transfer system for semiconductor processing equipment |
| JPH11176822A (ja) | 1997-12-05 | 1999-07-02 | Hitachi Ltd | 半導体処理装置 |
| US6204194B1 (en) | 1998-01-16 | 2001-03-20 | F.T.L. Co., Ltd. | Method and apparatus for producing a semiconductor device |
| US5931666A (en) | 1998-02-27 | 1999-08-03 | Saint-Gobain Industrial Ceramics, Inc. | Slip free vertical rack design having rounded horizontal arms |
| US6203617B1 (en) | 1998-03-26 | 2001-03-20 | Tokyo Electron Limited | Conveying unit and substrate processing unit |
| US6280183B1 (en) | 1998-04-01 | 2001-08-28 | Applied Materials, Inc. | Substrate support for a thermal processing chamber |
| US6109677A (en) | 1998-05-28 | 2000-08-29 | Sez North America, Inc. | Apparatus for handling and transporting plate like substrates |
| KR20000002833A (ko) | 1998-06-23 | 2000-01-15 | 윤종용 | 반도체 웨이퍼 보트 |
| US6167322A (en) | 1998-07-10 | 2000-12-26 | Holbrooks; Orville Ray | Intelligent wafer handling system and method |
| US6158951A (en) | 1998-07-10 | 2000-12-12 | Asm America, Inc. | Wafer carrier and method for handling of wafers with minimal contact |
| WO2000005761A1 (fr) | 1998-07-24 | 2000-02-03 | Mitsubishi Denki Kabushiki Kaisha | Bras de saisie de tranche |
| US6228173B1 (en) | 1998-10-12 | 2001-05-08 | Tokyo Electron Limited | Single-substrate-heat-treating apparatus for semiconductor process system |
| US6168668B1 (en) | 1998-11-25 | 2001-01-02 | Applied Materials, Inc. | Shadow ring and guide for supporting the shadow ring in a chamber |
| US5990650A (en) | 1998-11-25 | 1999-11-23 | Lumonics Corporation | Method and apparatus for orienting a disk via edge contact |
| JP2000183133A (ja) | 1998-12-15 | 2000-06-30 | Tokyo Seimitsu Co Ltd | ロボットハンド |
| NL1012004C2 (nl) | 1999-05-07 | 2000-11-13 | Asm Int | Werkwijze voor het verplaatsen van wafers alsmede ring. |
| US6279976B1 (en) | 1999-05-13 | 2001-08-28 | Micron Technology, Inc. | Wafer handling device having conforming perimeter seal |
| US6322116B1 (en) | 1999-07-23 | 2001-11-27 | Asm America, Inc. | Non-contact end effector |
| TWI250604B (en) | 1999-07-29 | 2006-03-01 | Ibm | Improved ladder boat for supporting wafers |
| US6244641B1 (en) | 1999-12-02 | 2001-06-12 | M.E.C. Technology, Inc. | Wafer transfer arm |
| US6347919B1 (en) | 1999-12-17 | 2002-02-19 | Eaton Corporation | Wafer processing chamber having separable upper and lower halves |
| JP2001176808A (ja) | 1999-12-21 | 2001-06-29 | Toshiba Ceramics Co Ltd | 気相薄膜成長装置におけるウエハ搬送方法およびそれに用いるウエハ支持部材 |
| US6331023B1 (en) | 2000-01-14 | 2001-12-18 | Asm America, Inc. | Gridded substrate transport spatula |
| US7125477B2 (en) * | 2000-02-17 | 2006-10-24 | Applied Materials, Inc. | Contacts for electrochemical processing |
| US6287112B1 (en) | 2000-03-30 | 2001-09-11 | Asm International, N.V. | Wafer boat |
| US6341935B1 (en) | 2000-06-14 | 2002-01-29 | Taiwan Semiconductor Manufacturing Company, Ltd. | Wafer boat having improved wafer holding capability |
| JP2002033284A (ja) | 2000-07-14 | 2002-01-31 | Mitsui Eng & Shipbuild Co Ltd | 縦型cvd用ウェハホルダー |
| US6464445B2 (en) | 2000-12-19 | 2002-10-15 | Infineon Technologies Richmond, Lp | System and method for improved throughput of semiconductor wafer processing |
| US6559039B2 (en) | 2001-05-15 | 2003-05-06 | Applied Materials, Inc. | Doped silicon deposition process in resistively heated single wafer chamber |
| US6753506B2 (en) * | 2001-08-23 | 2004-06-22 | Axcelis Technologies | System and method of fast ambient switching for rapid thermal processing |
| US6835039B2 (en) | 2002-03-15 | 2004-12-28 | Asm International N.V. | Method and apparatus for batch processing of wafers in a furnace |
| US7256375B2 (en) | 2002-08-30 | 2007-08-14 | Asm International N.V. | Susceptor plate for high temperature heat treatment |
| KR100491161B1 (ko) * | 2002-11-26 | 2005-05-24 | 주식회사 테라세미콘 | 반도체 제조장치 |
-
2004
- 2004-08-05 US US10/913,945 patent/US7181132B2/en active Active
- 2004-08-19 JP JP2004239311A patent/JP2005123583A/ja active Pending
-
2007
- 2007-01-31 US US11/669,842 patent/US7570876B2/en not_active Expired - Lifetime
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10242237A (ja) * | 1997-02-27 | 1998-09-11 | Nec Yamagata Ltd | ウエハ移載装置および移載方法 |
| JP2003031647A (ja) * | 2001-07-19 | 2003-01-31 | Hitachi Kokusai Electric Inc | 基板処理装置および半導体装置の製造方法 |
| JP2003209153A (ja) * | 2002-01-11 | 2003-07-25 | Hitachi Kokusai Electric Inc | 基板処理装置、及び半導体デバイスの製造方法 |
| JP2003282388A (ja) * | 2002-03-26 | 2003-10-03 | Hitachi Kokusai Electric Inc | 基板処理装置、及び半導体装置の製造方法 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007008698A (ja) * | 2005-07-01 | 2007-01-18 | Ishikawajima Harima Heavy Ind Co Ltd | 基板吸着方法、基板ホルダ及び基板吸着装置 |
| WO2016117095A1 (ja) * | 2015-01-22 | 2016-07-28 | 株式会社島津製作所 | 基板移載システム |
| JPWO2016117095A1 (ja) * | 2015-01-22 | 2017-06-15 | 株式会社島津製作所 | 基板移載システム |
Also Published As
| Publication number | Publication date |
|---|---|
| US7181132B2 (en) | 2007-02-20 |
| US20070122128A1 (en) | 2007-05-31 |
| US20050062465A1 (en) | 2005-03-24 |
| US7570876B2 (en) | 2009-08-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7570876B2 (en) | Method and system for loading substrate supports into a substrate holder | |
| JP4575647B2 (ja) | 炉内でウェハをバッチ処理するための方法および装置 | |
| JP4632551B2 (ja) | ウエハおよびリングの移送方法、熱処理設備リングの組み合せ、及びウエハとリングのセット | |
| TWI462145B (zh) | 直立式熱處理裝置及直立式熱處理方法 | |
| KR101736854B1 (ko) | 기판 처리 장치 | |
| CN108666232B (zh) | 基板处理系统、基板翻转装置和方法 | |
| KR102120521B1 (ko) | 웨이퍼 보트 지지대 및 이것을 사용한 열처리 장치 | |
| US20080025835A1 (en) | Bernoulli wand | |
| US6158951A (en) | Wafer carrier and method for handling of wafers with minimal contact | |
| JP2002536201A (ja) | 平坦なディスク形状サセプタを有するエピタキシャル誘導反応器における自己水平化真空システムにより基板を取り扱うための装置及びその操作方法 | |
| JP2008187017A (ja) | 縦型熱処理装置及び縦型熱処理方法 | |
| KR102514452B1 (ko) | 냉각 유닛, 이를 포함하는 기판 처리 장치 및 방법 | |
| JP2009099996A (ja) | 縦型熱処理装置及び被処理体移載方法 | |
| US7104578B2 (en) | Two level end effector | |
| JPH0661331A (ja) | 基板搬送装置 | |
| JP3157738B2 (ja) | ウエハ移載装置および移載方法 | |
| JP3373394B2 (ja) | 基板処理装置および基板処理方法 | |
| JP4358690B2 (ja) | 縦型熱処理装置及びその運用方法 | |
| JP2630366B2 (ja) | 板状体の搬入搬出方法および搬入搬出装置 | |
| JP2008235810A (ja) | 熱処理方法及び熱処理装置並びに被処理基板移載方法 | |
| WO2020137170A1 (ja) | 気相成長装置 | |
| JPH10139157A (ja) | 基板搬送装置 | |
| KR101578081B1 (ko) | 기판처리시스템 | |
| JP5031960B2 (ja) | 基板処理装置および半導体装置の製造方法 | |
| JP2004071618A (ja) | 基板処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070801 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070801 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20090807 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20090807 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20091225 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100309 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20100803 |