JP2004249966A - タイヤが最大摩擦係数レベルで機能するようにタイヤのスリップを最適レベルに維持するのに特に使用できる自動制御方法 - Google Patents
タイヤが最大摩擦係数レベルで機能するようにタイヤのスリップを最適レベルに維持するのに特に使用できる自動制御方法 Download PDFInfo
- Publication number
- JP2004249966A JP2004249966A JP2003198080A JP2003198080A JP2004249966A JP 2004249966 A JP2004249966 A JP 2004249966A JP 2003198080 A JP2003198080 A JP 2003198080A JP 2003198080 A JP2003198080 A JP 2003198080A JP 2004249966 A JP2004249966 A JP 2004249966A
- Authority
- JP
- Japan
- Prior art keywords
- tire
- value
- function
- equation
- controlling
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M17/00—Testing of vehicles
- G01M17/007—Wheeled or endless-tracked vehicles
- G01M17/02—Tyres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/172—Determining control parameters used in the regulation, e.g. by calculations involving measured or detected parameters
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B13/00—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion
- G05B13/02—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric
- G05B13/0205—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric not using a model or a simulator of the controlled system
- G05B13/024—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric not using a model or a simulator of the controlled system in which a parameter or coefficient is automatically adjusted to optimise the performance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2210/00—Detection or estimation of road or environment conditions; Detection or estimation of road shapes
- B60T2210/10—Detection or estimation of road conditions
- B60T2210/12—Friction
Abstract
【解決手段】本自動制御方法は、少なくとも1対の「i」の値についての評価または測定(Xi、Yi)を決定する段階と、原点と点(Xi、Yi)とを通る直線の傾斜αiの対応する値を決定する段階と、直接計算によりまたは(αi、Xi)との充分な数の対からの回帰により係数Apを計算して、変化曲線αi=f(Xi、Ap)をモデル化する段階と、所定の不変量「Invt」を用いて目標値Xmaxを計算する段階とを有している。
【選択図】図1
Description
【0001】
本発明は、或るシステムを特定作動点の近くに維持できるようにする自動制御技術に関し、好ましい用途では、本発明はタイヤの試験方法に関する。他の好ましい用途では、本発明は、車両の安定性を制御するシステムに関し、より詳しくは、ブレーキを作動したときにホイールのロックを防止することを目的とした前記制御システムの機能に関する。本発明のシステムは用語「ABS」として広く知られているが、例えば用語「ESP」として広く知られているシステムにおけるように1つのホイールにブレーキを自動的に作動することにより、または他の任意のアクチュエータ(四輪操舵、能動アンチロール…)に作動することにより車両を安定走路上に維持することを目的とする一層精巧な制御システムに関する。
【背景技術】
【0002】
車両の制動は、トレッドが最大摩擦係数値に一致するスリップGで機能するように作られると、一層効率的になることが知られている。最大摩擦係数値はμmaxと呼ばれている。しかしながら、平均的ドライバは、この条件を満たすように制動を制御することはできない。
【0003】
第一のいわゆる「ABS」ブレーキシステムは、タイヤがほぼ最大グリップで振動するようにタイヤを機能させるべく制動力を自動的に変調している(実際に、制動アクチュエータは一般に油圧ジャッキであり、ABSシステムが油圧を変調している)。このことは、再び最大グリップよりほんの僅か小さくなるように制動力を低下させる前にホイールのロック(ホイール回転の突然的停止)を開始させることにより最大グリップを検出できるようにするため、最大グリップを超えることを含むものである。次に制動力は、最大グリップを超えるまで再び自動的に増大され、次に低下される。
【0004】
それにもかかわらず、この方法は、最大摩擦係数値μmaxに一致するGmaxを簡単に超えることを含んでおり、これに対し理想的な状況は、目標スリップを大きく超えることが無く、目標スリップに近付くことである。重要なことは、Gmaxは最大可能スリップ値ではないと慣用的に言われているが、実際には摩擦係数がその最大可能値を有する特定スリップであることに留意することである。
【0005】
制動効率は、最大摩擦係数に一致するスリップの近くでのスリップ変化の細かさによって定まる。効率に言及するとき、本願での唯一の関心事は、緊急制動時に車両のドライバが車両を走行させることができる或る能力を付与するABSシステムの大きい利益は別として、減速の大きさにある。従って、本発明に関しては、制動は、その効率が高いほど制動距離は短くなる。このような制動効率は、制動が最大グリップ係数のレベルにない期間、すなわち過度のスリップの期間および不充分なスリップの期間により損なわれる。
【0006】
第一のいわゆる「ABS」ブレーキシステム(その機能は前述したとおりである)は、種々のタイヤに自動的に適合できるという長所を有していた。この特徴は、例えば、最大摩擦係数での新品タイヤのスリップの方が最大摩擦係数での摩耗タイヤのスリップより大きいことが知られているように、最大摩擦係数での冬期タイヤのスリップが最大摩擦係数での夏季タイヤのスリップよりかなり大きいことが知られているため重要である。残念なことに、この自動制御形式により引起こされる振動は不快であり、ドライバがブレーキペダルに加える押圧力を緩めてしまう効果をもたらすことがある。この世代のブレーキシステムは、例えば米国特許(下記特許文献1参照)に開示されており、該米国特許にはこのようなシステムの改善が説明されている。
【0007】
このシステムは種々のタイヤに適合できる。このために、圧力が段階的に増大される。この場合にはホイールの回転速度の増大が観察され、このため、この圧力を増大させるべきか低下させるべきかが演繹される。すなわち、この自動制御は「適応性」があるが、本来的に振動を発生する。
現在では、車両の安定性制御システムは、最大摩擦係数に一致するように推測された所定の目標スリップを目指して制動力を自動的に変調している。
【0008】
従ってこの場合には、車両ブレーキシステムは、トレッドが、選択された最適スリップレベルで機能する制動力を維持することを目指している。このようなシステムは、各ホイールの回転速度VTyreを連続的に測定する。特定のアルゴリズムでは(例えば下記特許文献2参照)、車両速度VVehicleの評価が得られる。従って、瞬間スリップG=1−VTyre/VVehicleの評価を利用できる。理想的には、この評価されたスリップが最適スリップ以下に維持される限り制動力を低下させてはならないか、自動制動ブースティングの機能が自動的に増大させることもできる(例えば下記特許文献3参照)。最大可能制動力が達成されると、制動圧力は最適スリップGmax、すなわち最大摩擦係数(μmax)に一致するスリップを維持すべく調整される。
【0009】
この維持は、最適スリップを決定することである。欧州特許出願(下記特許文献4参照)では、これは、評価された摩擦係数μおよび同様な評価された車両速度の関数として目指すべき値を与える基準曲線から行なわれる。摩擦係数μの評価は次のように行なわれる。制動が均質路面上で直線的に行なわれるときは、路面上でのタイヤの制動力FXは、ホイールおよびそのブレーキの制動圧力から決定される。全てのタイヤにより加えられる力を知ることにより、従って車両の特徴である負荷伝達、従って各ホイールについての負荷変動を考慮に入れて車両の減速度を計算できる。これから、各タイヤに加えられる垂直荷重FZの近似値を演繹できる。かくして、摩擦係数μ=FX/FZの評価が得られる。評価または測定により対応する横方向力FYが分れば、摩擦係数のより正確な評価が、公式
【数式1】

【0010】
また、前記基準曲線を参照することにより、評価されたスリップGについての基準係数μがどれほどになるかが確立される。現在の評価スリップが目標スリップより低い限り、スリップは、スリップ値が実質的に一致するまで増大される。この第二システムの長所は、第一システムよりも最大スリップに関する振動が小さいことである。
【0011】
残念なことに、この基準曲線は、実験的に決定、従って一定数のタイヤについて予め決定したものであり、これらの使用条件例えば膨張圧力、摩耗レベル等を超えて、車両のタイヤ機器の実際の状態を考慮に入れることはできない。この自動制御原理は、実際には振動を制限または除去するものであるが、制動効率は大幅に損なわれる。なぜならば、事実上本来的に使用されるタイヤは、実際に基準曲線でプログラムされたものとは非常に異なった最大摩擦係数でのスリップを必要とする。
【0012】
【特許文献1】
米国特許第3,980,346号明細書
【特許文献2】
米国特許第5,402,345号明細書
【特許文献3】
米国特許第5,816,666号明細書
【特許文献4】
欧州特許出願EP05303025号明細書
【考案の開示】
【発明が解決しようとする課題】
【0013】
本発明の目的は、例えばタイヤのスリップに適用できる自動制御原理を提案することにより上記欠点を解消し、簡単に上述した第一の既知の方法と同様に自己適応性を有し、かつグリップ限度を超えない最適スリップで第二方法のように少ない振動となることをより確実に目指すことにある。
本発明の一目的は、測定ベンチまたは車両でのできる限り簡単な測定によりかつできる限り少数の測定値により、考察するタイヤの実際の転がり条件に基いて、制動時(または駆動力が作用しているとき)の最大摩擦係数に関連するスリップを予測することにある。
【課題を解決するための手段】
【0014】
本発明は、以下に詳述する観察に基いており、不変量、すなわちタイヤおよび該タイヤが使用される路面の両方から独立した定数をもつパラメータの存在を識別できる。
概していえば、本発明は、以下に説明する特性を呈するあらゆる現象に適用できる調整方法に関する。本発明は、パラメータYが、増大、極値および減少を呈する過程に従ってパラメータXの関数として変化し、かつパラメータYの値を最大値に維持すべくパラメータXの値が自動的に制御される現象の自動制御方法において、
・少なくとも1対の「i」の値についての評価または測定(Xi、Yi)を決定する段階と、
・原点と点(Xi、Yi)とを通る直線の傾斜αiの対応する値を決定する段階と、
・直接計算によりまたは(αi、Xi)との充分な数の対からの回帰により係数Apを計算して、変化曲線αi=f(Xi、Ap)をモデル化する段階と、
・所定の不変量「Invt」を用いて目標値Xmaxを計算する段階とを有することを特徴とする自動制御方法を提案する。
目標値Xmaxは、直接計算または回帰の選択から得られるモデル化公式を用いて計算される。以下に述べるより関心の高い領域は、車両と路面との接触およびこれに含まれる要素およびシステムである。
【0015】
本発明は、移動車両のタイヤの機能の特性パラメータQが、増大、極値および減少を呈する過程に従ってパラメータPの関数として変化し、該パラメータPの値は、パラメータQの値を選択値に維持すべく、タイヤに加えられるトルク、タイヤの舵取り角、タイヤのキャンバ角およびタイヤに加えられる垂直値からなる群から選択される少なくとも1つの要素に作用するコントローラにより直接的または間接的に賦課される構成の路面接触システムにおいて、前記コントローラが、
・少なくとも1対の「i」の値についての評価または測定(δi、Fi)を決定する手段と、
・原点と点(Pi、Qi)とを通る直線の傾斜βiの対応する値を決定する手段と、
・直接計算によりまたは(βi、Pi)との充分な数の対からの回帰により係数Apを計算して、変化曲線βi=f(Pi、Ap)をモデル化する手段と、
・所定の不変量「Invt」を用いて目標値PTargetを計算する手段と、
・PInstantaneousとPTargetとの差の絶対値が所定閾値より大きいときに「能動」モードに変換する手段とを有することを特徴とする路面接触システムを提案する。
【0016】
もちろん、サーボ制御システムより詳しくはサーボ制御装置を有する安全システムで良く知られているように、本発明の使用は、システムのコントローラに、本願で説明するもの以外の手段すなわち目標値PTargetを計算する手段を設けること、例えば冗長をもたせおよび/または或る状況例えば評価しまたは測定した(Pi、Qi)の値で評価される他のストラテジーを用いることを排除するものではない。
コントローラが能動モードに切換わると、コントローラは警告を発しおよび/またはパラメータPに作用して、その値をPTargetに維持し、および/または他の任意の適当なパラメータに作用する。
【0017】
本発明の概念の第一用途はタイヤ試験または路面試験に関する。最大値から充分に離れた状態を維持すると同時に、スリップGの関数としての摩擦係数μの変化曲線が増大する最適スリップGOpt、より詳しくは最大摩擦係数(μmax)に一致するスリップGmaxを信頼性をもって評価できる。
【0018】
本発明は、
・少なくとも1対の「i」値についての評価または測定(Gi、μi)を決定する段階と、
・原点と点(Gi、μi)とを通る直線の傾斜αiの対応する値を決定する段階と、
・直接計算によりまたは(αi、Gi)との充分な数の対からの回帰により係数Apを計算して、変化曲線αi=f(Gi、Ap)をモデル化する段階とを有することを特徴とするタイヤの機能を制御する方法を提案する。
【0019】
摩擦係数は、本発明では上記のように評価され、またはもちろん他の任意の方法例えばタイヤまたはその環境で行なわれる測定から評価される。かくしてスリップに関するタイヤの機能のモデル化(上記変化曲線)が得られ、これは種々の用途を有している。以下に、所定の最適レベルでのスリップの制御に関する非制限的な好ましい用途、より詳しくは例えば、タイヤの最大グリップに対応するスリップの制御に関する用途を説明する。このスリップ制御は、既に強調したように、タイヤにより伝達された長手方向力が制動力である状況およびタイヤにより伝達される長手方向力が駆動力である状況の両方に適用できる。
【0020】
最適スリップGOptの評価が、所定不変量「Invt」を用いることにより、直接計算または選択回帰の選択から得られる公式により決定される。この場合には、直接計算または回帰の選択から得られるモデル化公式を用いて、上記一般的表現を置換することにより計算される。
また本発明は、以下に述べるタイヤ試験方法を提案する。
【0021】
本発明に関連して、トレッドのグリップ特性が、空気タイヤ、または非空気弾性外側ケーシングを取扱うものでも、更にはクローラトラックを取扱うものでも問題ではないことに留意すべきである。用語「トレッド」、「タイヤ」、「外側ケーシング」、「弾性外側ケーシング」、「クローラトラック」または「ホイール」は、均等物であると解釈すべきである。
【0022】
他の好ましい適用例では、本発明は、横方向力の飽和状態近くの機能領域においてタイヤまたは弾性外側ケーシングにより発生される横方向力の分析に関する。
本発明はまた、横方向力(「ドリフトスラスト」ともいう)が最大となるタイヤの横方向スリップ角δ(「ドリフト角」ともいう)の値を予測することを目的とする方法を提案する。タイヤがその最大値に到達し従ってもはやその一次機能(車両の走行を可能にする機能)を遂行できなくなる時点を予測して、タイヤの機能をドリフトスラストFtargetの所定目標値に維持できるようにするか、ドライバに警告を発することが問題である。タイヤの機能を所定目標値に維持するため、必要ならば予防的アクションがとられ、車両速度を低下させて危険な運転状況を回避する(車両がドライバの望むままに旋回しない場合には。事故が起きるであろう)。本発明により提案されるタイヤ機能の制御方法は、横方向力が最大となるタイヤのドリフト角δの値を予測するフェーズを有し、下記の段階すなわち、
・少なくとも1対の「i」の値についての評価または測定(δi、Fi)を決定する段階と、
・原点と点(δi、Fi)とを通る直線の傾斜αiの対応する値を決定する段階と、
・直接計算によりまたは(αi、δi)との充分な数の対からの回帰により係数Apを計算して、変化曲線αi=f(δi、Ap)をモデル化する段階とを有している。
【0023】
かくして、種々の用途を有する、ドリフトに関するタイヤの機能のモデル化(上記変化曲線)が得られる。タイヤのドリフトスラスト能力を適正に使用するためのドリフト角の制御に関する非制限的な好ましい用途を以下に説明する。この場合、この方法は更に、次の段階すなわち、
・所定不変量「Invt」を用いてドリフト角δOptの値を計算する段階と、
・ドリフト角δがδOptに接近すると警告信号を発生する段階を有している。
・ドリフト角δがδOptに近付いたときに警告信号を発生する、
【0024】
タイヤの試験方法に加えて、本発明はまた、車両の安定性を制御するシステムに関する。このことは、制動力が加えられたときにホイールのロックを防止することを目的とする用語「ABS」として広く知られた機能、または物理的に可能な限度まで制動力を自動的に増大させることを目的とした機能の両方を意味する。また本発明の車両の安定性制御システムは、1つのホイールのブレーキに自動的かつ選択的に作用することにより、および/または1つまたは幾つかのホイールにまたは車両の挙動に影響を与える他の任意のアクチュエータに自動的かつ選択的に作用することにより、車両を安定走路上に維持することを目的とする車両の安定性制御システムの一層精巧な態様を意味する。
【発明を実施するための最良の形態】
【0025】
以下、添付図面を参照して本発明をより詳細に説明する。
本発明は、次の観察に基いている。
図4は、2バールの膨張圧力で種々の路面上で試験した同一のMICHELIN XH1 195/65−15タイヤについてのスリップの関数としての摩擦係数μの種々の曲線を示すものである。図5は、種々のタイヤ、種々の路面、および速度、タイヤ荷重等に関する種々の試験条件に対応する非常に多くの試験についての摩擦係数μmaxの位置および対応スリップを示すものである。これらの値は広く拡散しているため、このようなアプローチを用いてグリップの物理的現象を把握できるようにする回帰(regression)を見出すことは、架空でない限り困難であることは理解されよう。
従って、本件出願人は、以下に述べる方法で研究を行なってきた。G=GmaxおよびG=Gmax/2(「50%」で示した)について計算した商の分析も行なわれた(図6参照)。
【0026】
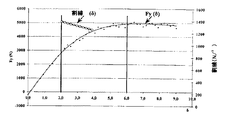
図7は、平均値を決定する前の約400回の試験すなわち全部で3000個の測定値についての比μ/Gat 50% of maxの関数として比μmax/Gmaxの値を示すものである。図7は、変えることができる多くの路面条件、種々のタイヤおよび試験条件(荷重、速度、圧力)を反映している。これにより、上記不変量(Invariant)「Invt」の卓越した実験的確認についての理解が得られる。
【0027】
考察されるタイヤおよび試験条件の如何にかかわらず、次式を満たすことが判明している。
【数式2】
【0028】
次に、曲線μ(G)(図8参照)の平均傾斜が考察される。この傾斜をαとすれば、次式が得られる。
【数式3】
【数式4】
【数式5】
これから、Gmaxが演繹され、これは、車両のブレーキシステムコントローラが目指す目標であり、本発明によれば次式が得られる。
【数式6】
【0030】
上記観察はスリップの関数としての摩擦係数の変化曲線に基いているので、同様な特性曲線を有する他の物理量の関数として1つのパラメータの変化を含むあらゆる現象に対して有効性が維持される。従って本発明は、Y(X)の曲線が図10に示す過程をたどるようなパラメータYが存在するときにパラメータXに対して有効であるか、並進(translation)、相似変換、反転(reversal)およびこれらの同じ変換等の簡単な変換の後にこのような曲線となる任意の変化現象に対して有効な自動制御方法を提案する(図10に示す曲線と同じ過程に戻る前に遂行される並進と反転との組合せを示す図11を参照されたい)。
【0031】
また、上記式(2)は線形回帰が、スリップGの関数としての摩擦係数μの変化の進化(evolution)を非常に正確にモデル化できることを示しているが、最も適当な回帰形式についての賢明な選択がなされれば、ここに提案される手順の精度を向上できることが判明している。かくして、回帰の適当な形式を選択することは本発明に包含され、このことは、一般に、以下に説明する調整手順を提案する。
【0032】
従って本発明は、次の特性を有するあらゆる物理的現象に適用される。
・測定または評価された制御パラメータX。
・次の形態すなわち、最大値Ymaxの存在;Ymaxより非常に小さいY(0)(ファクタ10は少なくとも値Y(0)とYmaxとを分離しなくてはならず、Y(X)はXmaxまで連続的に増大する)の所与の環境に対して、Xの値に基いた測定または評価されたパラメータY。
【0033】
この目的は、低いXの値に向けて出発するプロセスY(X)では、できる限り早くYの値を最大にすることである。ここでは、実際の測定(または評価)(一般に、入力Xおよび出力Yでのノイズにより影響を受ける)に関連して、特に、最大値を演繹的に知ることなくかつ最大値を超える必要なく最大値を得ることを可能にするロバストアルゴリズムが提案されている。この方法は絶対値を必要としない。
【0034】
以下の観察が使用された。すなわち、
(Xmax)の最大値での割線(secant)と、X=Xmax/2での割線との間には下回る関係が存在する。一般的な関係は一定の商(不変量)である。この不変量は、特定現象へのこの方法の各適用時に決定されなくてはならない。
【0035】
不変量を決定する実用的な非制限的方法は次の通りである。すなわち、
【数式7】
【0036】
0<Invt≦1は常に維持される。考察している物理的現象での固有不変量として上記した「Invt」は、実際に、特定分野へのあらゆる適用を行なうため、特定システムの洗練での調節変数を提供することによりアルゴリズムを微細に調節することを可能にする自由度となる。
【0037】
一般に、第一近似として次式が考察される。
【数式8】
【0038】
Xの関数としての割線の関係についての他の回帰形式を使用でき、この場合には、最大値Xmaxの分析公式または近似公式を得るのに、対応システム(最大値での割線の値を半値にリンクさせる等式:〔Eq〕)を解くことが賢明である。Yについてのスケール誤差(例えば、Yは、50%だけ系統的に課題評価される)は、Xmaxの予測値を変化させず、これにより、スケール効果に非常に有利な低い感度を与える。
この意図は、物理的曲線の不変量に基いて、利用できる全ての関連情報を用いることにより、最大値に向かって「上昇」する間に付随する「測定」により最大値を演繹することである。
【0039】
図1は、提案するアルゴリズムを示し、この主な段階は次の通りである。
1.実際の可能性に従って、測定または評価による点(Xi、Yi)の獲得。少なくとも2つの点を獲得するのが賢明である。Xiは非ゼロを表し、ここでは、小さ過ぎて不適当な値を無くすべく最小閾値が賦課される。
2.前の値を用いた割線の計算。割線の値は、αi=Xi/Yiを直接計算するか、ノイズを無くすためi以下の全ての添字点を考慮して、適当な回帰、例えば、
【数式9】
【0040】
3.対(αi、Xi)を用いた回帰の計算。回帰は、対象とする物理的現象およびノイズレベルに従って洗練しなければならないが、測定または評価された充分な数「n」の点(一般には、5つの点)から計算される。
・線形回帰の場合
【数式10】
【数式11】
【0041】
4.次に、Xmaxの評価が計算される。
・線形回帰の場合には、α=ALin・X+BLinを用いて次式が得られる。
【数式13】
【数式14】
5.この方法の特別な使用に従ってXmaxを知ることができると、殆どの適当なパラメータが調節される。例えば、パラメータXの値は、その値をXmaxに維持すべく自動的に制御される。
【0043】
6.必ずしも有効といえないかもしれないが、Ymaxの評価を計算するまで続行できる。
・線形回帰の場合には、更に、Ymaxが次のように決定される。ここで、Ycoeff_linは、実験的に調節される係数である。
【数式15】
【数式16】
線形:
【数式17】
【数式18】
【0044】
本発明の幾つかの可能適用例について以下に詳細に審査する。以下の記載は限定的なものでも排他的なものでもない。
【実施例1】
【0045】
例1:タイヤの機能の、或る摩擦係数例えば最大摩擦係数μ max での自動維持
長手方向グリップμ(G)に関する適用例に戻って説明する。この場合には、本願明細書の冒頭部分で既に説明したように、Yはタイヤの摩擦係数μ、すなわち、長手方向力(例えば駆動力または制動力)を、加えられた垂直力(すなわちタイヤに加えられた荷重)で割った商であり、XはタイヤのスリップGの比である(タイヤの速度と車両の速度との間にスリップが存在しないとき、すなわちタイヤが自由に転がるときはG=0%であり、タイヤの回転がロックされたときはG=100%である)。一般に、環境(路面の性質(アスファルトまたはコンクリート)、ドライまたはウェット(水レベル)、温度、およびタイヤの摩耗レベル)に基いて、スリップGの関数としてのμの値は非常に大きく変化する(μは、氷上で約0.15、ドライ路面上で約1.2である)。図4を参照すると、ここには、或る荷重および速度条件で測定された新しいXH1 195/65R15タイヤについてのスリップGの関数としてのμの幾つかの曲線が示されている。
【0046】
本発明により提案されるタイヤの機能を制御する方法は、測定または車両への適用であるか否かを問わず、特に、スリップGを自動制御して、所定の最適値GOptに維持することができる。前記所定スリップGOptは、より詳しくは、非制限的態様で、摩擦係数の所定値が実質的に値μmaxに一致するように選択される。この場合、これを特定最適値Gmaxと名付けることが一般的に行なわれている。
【0047】
このタイヤの最大値の位置は路面に基いて変化することが判明している。また、いかなる一致(unity)も存在しないことがある。達成される同じ最大レベルについて、2つの一致するスリップを得ることができる。それにもかかわらず、これらの曲線が共有する1つの不変量「Invt」が存在する。
【0048】
不変量を決定する方程式を、スリップの関数として摩擦係数の分析の場合に適用することにより、不変量は、1より小さい正の値をもつpを用いて、より詳しくは次式のように計算される。
【数式19】
【0049】
かくして次式が得られる。
【数式20】
データを、他のパラメータY(例えば摩擦係数μmax)の最大値に一致するパラメータX(例えばスリップG)の第一値で、および第一値の50%(例えば上記スリップの50%)に一致する第二値で処理することにより、1つの不変量「Invt」が導入された。50%での処理の選択は任意であること、および処理が摩擦係数μmaxに一致するスリップの25%または75%で遂行される場合には不変量が得られることも判明している。従ってこの選択は、特に、各特定用途への実験的フェーズの一部である。
【0051】
次に、傾斜αiを決定することが賢明である。これはαi=μi/Giの直接計算により行なわれ、適当な回帰(例えば、次式のような線形回帰)が使用される。
【数式21】
【数式22】
次に、線形回帰が使用される場合には、α=ALin・G+BLinを用いて、GOptが下記のように計算される。
【数式23】
【数式24】
割線の線形アプローチにより決定される下記表は、2バールの膨張圧力により種々の路面で試験されたMICHELIN XH1 195/65−15タイヤでの実際の測定値からの最大スリップの計算を示すものである。
【0054】
【表1】
さもなくば、2つの特定係数Ap、AおよびBは、下記の指数回帰により計算される。
【数式25】
次に、指数回帰が使用される場合には、GOptが下記のようにして計算される。
【数式27】
【数式28】
【0057】
本願に提案する方法は、摩擦係数の変化のみが取扱われ、その絶対値は取扱われないので自己適応性を有しかつ非常にロバスト(robust)である。また、ノイズに対する感度が非常に低いことも判明している。
【0058】
スリップの関数としてタイヤの長手方向グリップに適用される上記方法に固有の性質は、タイヤの試験を行なうのに非常に適しており、シミュレーションを構成するのに一層てきしている。また、上記固有の性質は、車両のブレーキシステムでのタイヤのグリップのモデル化に最も適している。
【0059】
タイヤ工業界では、本発明はタイヤの試験および測定に適用される。従って本発明の一態様は、スリップに関してタイヤを試験する方法であり、下記の段階すなわち、
・選択された路面(路面は、道路、試験トラック、平トラックまたはホイールを備えた試験機で構成できる)上でタイヤを動転させる段階と、
・所定荷重FZ1をタイヤに加える段階と、
・タイヤがグリップ限度以下に維持されるようにして、所定スリップをタイヤに付与(タイヤと路面との間の相対速度で作動)する段階と、
・タイヤの長手方向応力FX1を測定または評価する段階と、
・摩擦係数μ1=FX1/FZ1の値を計算する段階と、
・前の段階を反復して、少なくとも1つの他の応力FX1/FZ1の対「i」についての摩擦係数μiの少なくとも1つの他の値「i」を計算しかつ関連スリップGiを測定する段階と、
・計算した摩擦係数の各値について、原点と点(Gi、μi)とを通る直線の傾斜αiを決定する段階と、
・変化曲線αi=f(Gi、Ap)をモデル化すべく、直接計算によりまたは(αi、Gi)との充分な数の対からの適当な回帰により係数Apを計算する段階と、
・所定不変量「Invt」を使用して、所定摩擦係数値GOptが得られるようにする最適スリップを計算する段階と、
からなる。
【0060】
もちろん、理解されようが、不変量は、この試験方法を実験的に洗練することにより選択される。例えば洗練中に不変量の第一値を選択するには、1より小さい正の値をもつpを使用して、次式のように不変量を決定するのが有利である。
【数式29】
前述と同様にして、2つの特定係数Apおよび係数AおよびBは、線形回帰および指数回帰からなる群から選択された回帰により計算できる。
この場合にも、pの値として、0.25〜0.75の間の値、一般には0.5を採用できる。
【実施例2】
【0062】
例2:制御時または駆動力を受けているときの最適スリップの決定
車両のブレーキシステムは効率的であるが、それは製造業者が選択する一定数のタイヤ最適であること、および車両に実際に装着されたタイヤには適用できないことは知られている。より詳しくは、良く知られているように、特に所与の路面上の力Fxでのグリップおよびスリップにおいて極めて異なる挙動を呈する冬期タイヤには適用できない。従って、車両のブレーキシステムの効率は、車両に実際に使用されているタイヤに自動的に適用できるならば改善される。
【0063】
従って本発明は、路面上を走行することを意図したタイヤにスリップを伝達する手段と、該スリップ(ホイールの速度に作用)を変調する手段と、摩擦係数μの所定値に一致する少なくともパラメータスリップGOptを用いるコントローラとを有する車両の安定性を制御するシステムにおいて、前記コントローラは、下記のように、すなわち、
・グリップのいかなる損失も存在しない条件で、スリップGiの少なくとも2つの異なるレベル「i」でスリップをタイヤに伝達する手段を付勢する度毎に、摩擦係数μiの値を決定し、
・原点と点(Gi、μi)とを通る直線の傾斜αiを決定し、
・充分な数の点(αi、Gi)の対から、直接計算によりまたは適当な回帰より詳しくは線形回帰および指数回帰からなる群から選択された回帰により係数Apを計算して、変化曲線αi=f(Gi、Ap)をモデル化し、
・所定の不変量「Invt」を用いて最適スリップGOptを計算し、
・長手方向の力をタイヤに伝達する手段に作用して、スリップを最大値GOptに維持する、
ことにより前記パラメータ(単一または複数)を計算する手段を有していることを特徴とする車両の安定性制御システムに拡大される。
【0064】
もちろん、現在の一般的な設計による内燃機関を備えた車両の場合には、タイヤにスリップを伝達する手段は、本質的に制動状況でのブレーキでありかつ本質的に駆動力が作用するエンジン管理システムである。当業者ならば、本発明を他の車両設計例えば電気自動車に適用することは容易であろう。
この場合にも、前述のように、本発明は、システムのコントローラが、本願に説明する手段に加えて、他のスリップ制御ストラテジーを具現する他のプログラムによりローディングされることを排除しない。このことは、或る状況でへ、例えばスリップをタイヤに伝達する手段の任意の特別な付勢時に点(Gi、μi)の値を評価または測定する場合に好ましいものとなる。
【0065】
より詳しくは、不変量を決定する好ましいアプローチは次の通りであり、この場合にも0.25〜0.75の間の値、一般には0.5を有するpを使用する。
【数式30】
本発明の特定実施形態では、スリップを変調するデバイスがブレーキ制御に作用する。本発明の他の実施形態では、スリップを変調するデバイスがホイールでの駆動トルクに作用する。
【0067】
車両のブレーキシステムに特に有効な新しいアルゴリズムであって、上記不変量「Invt」に基いて摩擦係数μmaxの位置を決定できるようにするアルゴリズムを創出することが提案される。理解されようが、このようなシステムは摩擦係数μmaxの評価を行い、次に、基準曲線により最適スリップを選択する。これらの段階を下記のもので置換することを提案する。
【0068】
この原理の実施は、ABSコントローラに幾つかの修正を必要とする。すなわち、
・計算周波数は40Hz以上であるのが好ましい。
・信頼できる(代表的な)目標を計算するための充分に多数の位置を獲得すべく、ABSのトリガリングを調整することが賢明である。
・スリップでの測定点を非常に少数(例えば、1%以下のスリップに一致)に減少させることが有利である。
・スリップGの非常に高い精度が得られるようにするには、特殊手段を用いるがホイール速度データ処理(GPS、路面観察…)を行わないで車両速度を獲得するのが有利である。
【0069】
上記提案の新しいアルゴリズムにより、車両のブレーキシステムの効率は、車両に現実的に使用できる全範囲のタイヤに亘って非常に優れたものとなる。
開発された新しいアルゴリズムは、システムを、いかなる付加センサおよびタイヤトレッドの測定をも必要とせず、あらゆる種類のタイヤに自動的に適合させることができる。また、このアルゴリズムは、所与の車両に選択されるタイヤの種類に対して微調節の必要性を無くすことができる。
上記のように、本発明の方法は、測定値についてだけでなく、評価値についても結果を得ることができる。実際の(評価したものではない)力FX、FyおよびFZに関する情報は、より正確な目標をもつこと、および/または賞賛に価するチェックを行なって、車両のブレーキシステムの信頼性を向上させることができる。
【実施例3】
【0070】
例3:発生したドリフトおよび横方向力F y (ドリフトスラストとも呼ばれる)に関するタイヤの機能の分析
他の適用例を以下に説明する。この適用例は、タイヤのドリフト角δ(ホイールの平面の路面上の突出部と路面上での車両のベクトル速度とのなす角度)の関数として横方向力Fyを特徴付けることを含んでいる。最適ドリフト角δOpt例えばタイヤが最大横方向力Fyを発生するドリフト角は予め決定でき、横方向力Fymaxも予め決定できる。最大横方向力は、例えば、関連する車両の平衡にとって重要なものである。これは、この機能形態でのタイヤの試験が本発明の好ましい適用であることによる。例えばこの場合には、本発明は、横方向力が最大となりかつ警告信号が発生されるタイヤのドリフト角δの値を予測するフェーズを有する、タイヤの機能を制御する方法、またはドリフト角δがδOptを維持するように自動的に制御される方法、または警告信号が発生される場合にドリフト角δが減少される方法の実施を可能にする。
【0071】
横方向Fyとドリフト角δとの関係は、前のセクションで述べたμとGと同じ形式である。従って、例えば不変量は下記のように決定できる。
【数式31】
上記のように、pに関する限り、その値は0.25〜0.75の間、例えば0.5であるのが好ましく、pの値の選択の結果に関して上記一般的表示を参照されたい。この正確な場合には、大きさ「Invt」は顕著に高いものとなる。値が小さくなり過ぎて、割線の決定を妨げることを回避するため、2°の最小ドリフト角閾値を維持すると同時に0.8の値が得られた。
【0073】
図3は、ドリフト角に対するドリフトスラストの変化、および/または原点と、同じドリフト角での前の曲線の点とを通る割線の同じドリフト角での変化を示す曲線である。キャンバをもたず、5000ニュートンの荷重を受けるMichelin Primacy 235/55R17タイヤでは、本発明の方法により評価された最大ドリフト角は5.5°、および最大評価ドリフトスラストは5935ニュートンである。
【0074】
次に、傾斜αiを決定するのが賢明である。これは、αi=Fi/δを直接計算することにより行なわれ、または適当な回帰例えば下記のような線形回帰が使用される。
【数式32】
【数式33】
線形回帰が使用される場合には、α=ALin・δ+BLinを用いて、δOptが下記のように計算される。
【数式34】
アルゴリズムを適用することにより、横方向力(Fy)が約6°のドリフト角δでその最大値を達成するように予め定められている。タイヤがスリップを開始する前に横方向スラストを生じさせる可能性はもはや大きくないことを知ることができるので、この情報は価値あるものである(横方向スラストが飽和すると車両が旋回することが防止される)。
必要ならば、下記のように、δOptに一致するFの値が決定されるまで続けることができる。ここで、Fcoeff_linは指数的に調節される係数である。
【数式35】
さもなくば、2つの特定係数Ap、係数AおよびBは、「n」個の測定点または評価点に適用される下記の指数回帰により計算される。
【数式36】
次に、指数回帰が使用される場合には、GOptが下記のようにして計算される。
【数式38】
【数式39】
【0079】
例3a:タイヤの測定または試験のための使用
タイヤ工業界では、本発明は、タイヤの試験または測定に適用される。従って本発明の他の態様では、ドリフトに関してタイヤを試験する方法は下記段階、すなわち
・路面上でタイヤを動転させる段階と、
・所定荷重FZ1をタイヤに加える段階と、
・タイヤがグリップ限度以下に維持されるようにして、所定ドリフト角δiをタイヤに付与しかつ前記ドリフト角δiに一致するドリフトスラストFiを測定または評価する段階と、
・前の段階を反復して、少なくとも1つの他の対(δi、Fi)の値「i」を計算する段階と、
・原点と点(Gi、Fi)とを通る直線の傾斜αiの対応値を決定する段階と、
・変化曲線αi=f(δi、Ap)をモデル化すべく、直接計算によりまたは(αi、δi)との充分な数の対からの適当な回帰により係数Apを計算する段階と、
・所定不変量「Invt」を使用して、ドリフト角δOptの値を計算する段階と、
からなる。
【0080】
同様に、不変量は、この試験方法を指数的に洗練することにより選択される。例えば、この洗練中に不変量の第一値を選択するには、1より小さい正の値をもつpを用いて、不変量を下記のように決定するのが有利である。
【数式40】
前記と同様にして、2つの特定係数Apおよび係数AおよびBは、線形回帰および指数回帰からなる群から選択された回帰により計算される。
この場合にも、pの値として、0.25〜0.75の間の値、一般には0.5を採用できる。
【実施例5】
【0082】
例3b:湾曲路上での車両の最大可能ドリフトの決定
タイヤが装着された車両の安定性への本発明の適用において、本発明により提案されるタイヤの機能を制御する方法は、タイヤのドリフト角δ(ドリフト角δは、ホイールの平面の路面上の突出と路面上での車両のベクトル速度とのなす角度であう)の値を予測するフェーズを有し、このフェーズでは横方向力が最大になり、ドリフトスラストに関してタイヤの最大ポテンシャルへの非常に近いアプローチがなされた場合にドライバに警告を与えることができ、或いは、警告信号が発生されたときに車両の安定性を自動的に制御するシステムに一体化されたより進歩した態様では、車両速度が自動的に制限または低下される。
【0083】
本発明は能動車両(後車軸および/または前車軸の能動ステアリング機構、またはボディロールの能動制御装置、または車両の横方向平衡に作用する任意のシステムを備えており、従って、タイヤに賦課される横方向スラストに作用する車両)にも適用できる。すなわち、車両の横方向安定性を自動制御するシステムからの命令に従って反応することもできる。
【0084】
この点に関し、本発明は、路面上を走行することを意図した少なくとも1つのタイヤを有する車両の安定性を制御するシステムにも拡大される。車両には、車両に使用される技術に基いて、車両のドライバにより該ドライバの制御手段に伝達される命令に基いて、およびタイヤの機能をドリフトスラストFtargetの所定の目標値に維持することを目的とする毛色コントローラにより与えられる命令に基いて、すなわち各車軸のタイヤのドリフト角に直接的または間接的に基いて、選択されたパラメータ(以下、パラメータ「λ」と呼ぶ)を制御するシステムが設けられている(例えば、前記パラメータ「λ」は能動舵取りを行なうための前後のホイールのステアリングであり、または前記パラメータ「λ」は能動アンチロールのためのボディロールであり、またはパラメータ「λ」は制動アクチュエータを介して安定制御を行なうための制動力である)。走路コントローラは、ドリフトスラストFtargetの最大値に一致するドリフト角の少なくとも1つの最適値δOptを使用し、前記コントローラは、下記の作動を遂行する手段を有している(前後の車軸が同じでなく、左右のタイヤが異なっている各車軸での作動が好ましいが、本発明の原理は、1つのタイヤのみに適用できるものであるが、当業者ならば全てのタイヤに対処させることができるであろう)。
【0085】
・ドリフト角の少なくとも2つの異なるレベル「i」で前記パラメータ「λ」を制御するシステムを付勢する度毎に、FYiおよび関連するドリフト角δiの種々の値を記録し、
・原点と点(δi、FYi)とを通る直線の傾斜αiを決定し、
・直接計算によりまたは(αi、δi)との充分な数の対からの適当な回帰により、より詳しくは線形回帰および指数回帰からなる群から選択された回帰により係数Apを計算して、変化曲線αi=f(δi、Ap)をモデル化し、
・所定の不変量「Invt」を用いて、ドリフトスラストFtargetの最大値に関連するタイヤドリフト角の最適ドリフト角の値δOptを計算し、
・ドリフト角δがδOptに近付いたときに警告信号を発生する。
【0086】
前述のように、最適ドリフト角δは、直接計算または回帰の選択から得られるモデル化公式(上記変化曲線)により計算される。より詳しくは、不変量を決定する好ましいアプローチは、0.25〜0.75(一般的に0.5)の間の値をもつpを使用する次式である。
【数式41】
本発明の特定の実施形態では、警告信号が発生されると、選択されたパラメータを制御するシステムが付勢され、ドリフト角δを最適値δOptに維持する。他の実施形態では、警告信号が発生されると、車両速度が制限または減速される。
【0088】
強調すべき重要なことは、スリップの関数として摩擦係数を用いることと、ドリフト角の関数としてドリフトスラストを用いることとは相反的なものではないということである。特に、これらの2つの態様を同時に使用することは、車両の走路の自動制御システムにとって有利なことである。かくして、本発明の一態様は、タイヤの前記機能を摩擦係数μの所定値に維持することを目的として、所与の形状のタイヤの機能を自動的に制御する方法に関し、下記の段階すなわち、
・複数対の「i」の値についての評価または測定(Gi、μi)を決定する段階と、
・前記タイヤの固有の物理的特性および存在する実際の機能的形状の関数として、タイヤGOptの最適スリップの評価を計算する段階と、
・GinstantaneousとGOptとの差の関数として形状を自動的に制御する段階と
を有している。
【実施例6】
【0089】
例4:(金属試験片での引張り試験)
他の適用例として、伸びの関数としての引張り応力を受ける試験片の伸びの分析について留意されたい(破断直前に試験を停止させることにより試験片の突然破断を回避するため)。この場合、パラメータXは伸び、最大伸びは力の測定および応力付与開始時の伸びから評価され、かつ試験は最大伸びの近くでかつ最大伸びより小さい選択された伸びが生じた時点で停止される。また、最大可能力も評価される。
【図面の簡単な説明】
【0090】
【図1】本発明による自動制御手順を示すブロック図である。
【図2】スリップに対する摩擦係数の変化を示す曲線と、原点と前記スリップと同じスリップでの前の曲線の点とを通る割線の同じスリップでの変化を示す曲線とを示すグラフである。
【図3】ドリフト角に対するドリフトスラストの変化を示す曲線と、原点と前記ドリフト角と同じドリフト角での前の曲線の点とを通る割線の同じドリフト角での変化を示す曲線とを示すグラフである。
【図4】種々の試験条件下での同一タイヤのスリップに関する摩擦係数の変化についてプロットした幾つかの曲線を示すグラフである。
【図5】多数のタイヤおよび種々の試験条件下での摩擦係数μmaxおよびの位置および関連するスリップGmaxの位置を示すグラフである。
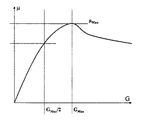
【図6】スリップに対する摩擦係数の変化を示す一般的な概略曲線であり、このグラフには2つの特別な点すなわち摩擦係数μmaxおよびこの関連スリップGmaxが印されており、摩擦係数μ50%に対応する慣用点は、Gmax/2で慣用的に印されたスリップGmaxを50%上回っている。
【図7】多数のタイヤおよび種々の試験条件下での摩擦係数μmaxに関連するスリップについての摩擦係数μmaxの商μ/G(Gmaxでの商)、および摩擦係数μmaxに関連するスリップの50%のスリップについての摩擦係数の商μ/G(Gmaxの50%での商)に対応する縦軸上の点の位置を示すグラフである。
【図8】スリップに対する摩擦係数の変化を示す一般的な概略曲線および原点を通る割線の過程および3つの特定点のスリップの曲線を示すグラフである。
【図9】原点と、同じスリップでの摩擦係数の変化曲線の点とを通る割線の傾斜のスリップの関数としての線形変化を示す一般的な概略曲線のグラフである。
【図10】Xに対するYの変化を含む現象への一般的な適用曲線であって、特定XについてのYの最大値およびYの最大値での単調上昇を呈する曲線を示すグラフである。
【図11】基本的には前の変化現象と同様な他の変化現象に一般的に適用した場合の曲線を示すグラフである。
Claims (56)
- パラメータYが、増大、極値および減少を呈する過程に従ってパラメータXの関数として変化し、かつパラメータYの値を最大値に維持すべくパラメータXの値が自動的に制御される現象の自動制御方法において、
・少なくとも1対の「i」の値についての評価または測定(Xi、Yi)を決定する段階と、
・原点と点(Xi、Yi)とを通る直線の傾斜αiの対応する値を決定する段階と、
・直接計算によりまたは(αi、Xi)との充分な数の対からの回帰により係数Apを計算して、変化曲線αi=f(Xi、Ap)をモデル化する段階と、
・所定の不変量「Invt」を用いて目標値Xmaxを計算する段階とを有することを特徴とする自動制御方法。 - 前記パラメータXの値は、その値をXmaxに維持すべく自動的に制御されることを特徴とする請求項1記載の自動制御方法。
- 前記不変量は、1より小さい正の値をもつpを用いて、次式すなわち、
【数式1】
により決定されることを特徴とする請求項1記載の自動制御方法。 - 前記pの値は0.25〜0.75の間にあることを特徴とする請求項3記載の自動制御方法。
- 前記pの値は0.5であることを特徴とする請求項4記載の自動制御方法。
- 前記傾斜αiは、αi=Yi/Xiを直接計算することにより決定されることを特徴とする請求項1記載の自動制御方法。
- 前記傾斜αiは適当な回帰を行なうことにより決定されることを特徴とする請求項1記載の自動制御方法。
- 線形回帰は、次式すなわち、
【数式2】
に従って行なわれることを特徴とする請求項1記載の自動制御方法。 - 2つの特定係数Apおよび係数AおよびBは、「n」個の測定点または評価点に適用される下記線形回帰すなわち、
【数式3】
により計算されることを特徴とする請求項1記載の自動制御方法。 - 2つの特定係数Apおよび係数AおよびBは、「n」個の測定点または評価点に適用される下記指数回帰すなわち、
【数式4】
【数式5】
により計算されることを特徴とする請求項1記載の自動制御方法。 - Xmaxは、α=ALin・X+BLinを用いて、次式すなわち、
【数式6】
に従って計算されることを特徴とする請求項9記載の自動制御方法。 - Xmaxは、
【数式7】
を用いて、次式すなわち、
【数式8】
に従って計算されることを特徴とする請求項10記載の自動制御方法。 - 更にYmaxが、次式すなわち、
【数式9】
に従って決定され、ここで、YCoeff_linは指数的に調節される係数であることを特徴とする請求項9記載の自動制御方法。 - 更にYmaxが、次式すなわち、
【数式10】
に従って決定され、ここで、YCoeff_expは指数的に調節される係数であることを特徴とする請求項10記載の自動制御方法。 - 移動車両のタイヤの機能の特性パラメータQが、増大、極値および減少を呈する過程に従ってパラメータPの関数として変化し、該パラメータPの値は、パラメータQの値を選択値に維持すべく、タイヤに加えられるトルク、タイヤの舵取り角、タイヤのキャンバ角およびタイヤに加えられる垂直値からなる群から選択される少なくとも1つの要素に作用するコントローラにより賦課される構成の路面接触システムにおいて、前記コントローラが、
・少なくとも1対の「i」の値についての評価または測定(δi、Fi)を決定する手段と、
・原点と点(Pi、Qi)とを通る直線の傾斜βiの対応する値を決定する手段と、
・直接計算によりまたは(βi、Pi)との充分な数の対からの回帰により係数Apを計算して、変化曲線βi=f(Pi、Ap)をモデル化する手段と、
・所定の不変量「Invt」を用いて目標値PTargetを計算する手段と、
・PInstantaneousとPTargetとの差の絶対値が所定閾値より大きいときに「能動」モードに変換する手段とを有することを特徴とする路面接触システム。 - ・少なくとも1対の「i」の値についての評価または測定(Gi、μi)を決定する段階と、
・原点と点(Gi、μi)とを通る直線の傾斜αiの対応する値を決定する段階と、
・直接計算によりまたは(αi、Gi)との充分な数の対からの回帰により係数Apを計算して、変化曲線αi=f(Gi、Ap)をモデル化する段階とを有することを特徴とする、スリップに関するタイヤの機能を制御する方法。 - 最適スリップGOptの評価は、所定不変量「Invt」を用いて行なわれることを特徴とする請求項16記載のスリップに関するタイヤの機能を制御する方法。
- スリップGは自動的に制御されて、GOptに維持されることを特徴とする請求項17記載のスリップに関するタイヤの機能を制御する方法。
- 「Invt」の値はほぼ0.58であることを特徴とする請求項17記載のスリップに関するタイヤの機能を制御する方法。
- 不変量は、次式すなわち、
【数式11】
に従って決定されることを特徴とする請求項17記載のスリップに関するタイヤの機能を制御する方法。 - 前記pの値は0.25〜0.75の間にあることを特徴とする請求項20記載のスリップに関するタイヤの機能を制御する方法。
- 前記pの値は0.5であることを特徴とする請求項21記載のスリップに関するタイヤの機能を制御する方法。
- 前記傾斜αiは、αi=μi/Giを直接計算することにより決定されることを特徴とする請求項17記載のスリップに関するタイヤの機能を制御する方法。
- 前記傾斜αiは適当な回帰を行なうことにより決定されることを特徴とする請求項17記載のスリップに関するタイヤの機能を制御する方法。
- 線形回帰は、次式すなわち、
【数式12】
に従って行なわれることを特徴とする請求項17記載のスリップに関するタイヤの機能を制御する方法。 - 2つの特定係数Apおよび係数AおよびBは、「n」個の測定点または評価点に適用される下記線形回帰すなわち、
【数式13】
により計算されることを特徴とする請求項17記載のスリップに関するタイヤの機能を制御する方法。 - 2つの特定係数Apおよび係数AおよびBは、「n」個の測定点または評価点に適用される下記指数回帰すなわち、
【数式14】
【数式15】
により計算されることを特徴とする請求項17記載のスリップに関するタイヤの機能を制御する方法。 - GOptは、α=ALin・G+BLinを用いて、次式すなわち、
【数式16】
に従って計算されることを特徴とする請求項17記載のスリップに関するタイヤの機能を制御する方法。 - GOptは、
【数式17】
を用いて、次式すなわち、
【数式18】
に従って計算されることを特徴とする請求項27記載のスリップに関するタイヤの機能を制御する方法。 - GOptに対応するμの値が、次式すなわち、
【数式19】
に従って更に決定されることを特徴とする請求項26記載のスリップに関するタイヤの機能を制御する方法。 - 更にμmaxが、次式すなわち、
【数式20】
に従って決定されることを特徴とする請求項27記載のスリップに関するタイヤの機能を制御する方法。 - ・少なくとも1対の「i」の値についての評価または測定(δi、Fi)を決定する段階と、
・原点と点(δi、Fi)とを通る直線の傾斜αiの対応する値を決定する段階と、
・直接計算によりまたは(αi、δi)との充分な数の対からの回帰により係数Apを計算して、変化曲線αi=f(δi、Ap)をモデル化する段階とを有することを特徴とする、横方向力が最大となるタイヤのドリフト角δの値を予測するフェーズを含むタイヤの機能を制御する方法。 - ・所定不変量「Invt」を用いてドリフト角δOptの値を計算する段階と、
・ドリフト角δがδOptに接近すると警告信号を発生する段階とを更に有することを特徴とする請求項32記載のタイヤの機能を制御する方法。 - 選択されたパラメータは自動的に制御されて、δOptに維持されることを特徴とする請求項33記載のタイヤの機能を制御する方法。
- 警告信号が発生された場合には、選択されたパラメータが自動的に制御されて、ドリフト角δを減少させることを特徴とする請求項33記載のタイヤの機能を制御する方法。
- 不変量は、1より小さい正の値をもつpを用いて、次式すなわち、
【数式21】
に従って決定されることを特徴とする請求項33記載のタイヤの機能を制御する方法。 - 前記pの値は0.25〜0.75の間にあることを特徴とする請求項36記載のタイヤの機能を制御する方法。
- 前記pの値は0.5であることを特徴とする請求項37記載のタイヤの機能を制御する方法。
- 前記傾斜αiは、αi=Fi/δiを直接計算することにより決定されることを特徴とする請求項33記載のタイヤの機能を制御する方法。
- 前記傾斜αiは適当な回帰を行なうことにより決定されることを特徴とする請求項33記載のタイヤのドリフト角δを自動的に制御する方法。
- 線形回帰は、次式すなわち、
【数式22】
に従って行なわれることを特徴とする請求項33記載のタイヤの機能を制御する方法。 - 2つの特定係数Apおよび係数AおよびBは、「n」個の測定点または評価点に適用される下記線形回帰すなわち、
【数式23】
により計算されることを特徴とする請求項33記載のタイヤの機能を制御する方法。 - 2つの特定係数Apおよび係数AおよびBは、「n」個の測定点または評価点に適用される下記指数回帰すなわち、
【数式24】
【数式25】
により計算されることを特徴とする請求項33記載のタイヤの機能を制御する方法。 - δOptは、α=ALin・δ+BLinを用いて、次式すなわち、
【数式26】
に従って計算されることを特徴とする請求項42記載のタイヤの機能を制御する方法。 - GOptは、
【数式27】
を用いて、次式すなわち、
【数式28】
に従って計算されることを特徴とする請求項43記載のタイヤの機能を制御する方法。 - 更にFTargetが、次式すなわち、
【数式29】
に従って更に決定されることを特徴とする請求項42記載のタイヤの機能を制御する方法。 - 更にFTargetが、次式すなわち、
【数式30】
に従って更に決定されることを特徴とする請求項43記載のタイヤの機能を制御する方法。 - ・選択された路面上でタイヤを動転させる段階と、
・所定荷重FZ1をタイヤに加える段階と、
・所定スリップをタイヤに付与する段階と、
・タイヤの長手方向力FX1を測定または評価する段階と、
・摩擦係数μ1=FX1/FZ1の値を計算する段階と、
・前の段階を反復して、少なくとも1つの他の応力FXi/FZiの対「i」についての摩擦係数μiの少なくとも1つの他の値「i」を計算しかつ関連スリップGiを測定する段階と、
・計算した摩擦係数の各値について、原点と点(Gi、μi)とを通る直線の傾斜αiを決定する段階と、
・変化曲線αi=f(Gi、Ap)をモデル化すべく、直接計算によりまたは充分な数の対(αi、Gi)からの適当な回帰により係数Apを計算する段階と、
・所定不変量「Invt」を使用して、所定摩擦係数値GOptが得られるようにする最適スリップを計算する段階とを有することを特徴とする、スリップに関してタイヤを試験する方法。 - 前記不変量は、1より小さい正の値をもつpを用いて、次式すなわち、
【数式31】
により決定されることを特徴とする請求項48記載の試験方法。 - ・選択された路面上でタイヤを動転させる段階と、
・所定荷重FZ1をタイヤに加える段階と、
・タイヤがグリップ限度以下に維持されるようにして、所定ドリフト角δiをタイヤに付与しかつ該ドリフト角δiに対応するドリフトスラストFiを測定または評価する段階と、
・前の段階を反復して、少なくとも1つの他の値(δi、Fi)の対「i」を計算する段階と、
・原点と点(δi、Fi)とを通る直線の傾斜αiの対応値を決定する段階と、
・変化曲線αi=f(δi、Ap)をモデル化すべく、直接計算によりまたは充分な数の対(αi、δi)からの適当な回帰により係数Apを計算する段階と、
・所定不変量「Invt」を使用してドリフト角δOptの値を計算する段階とを有することを特徴とする、ドリフト角に関してタイヤを試験する方法。 - 前記不変量は、1より小さい正の値をもつpを用いて、次式すなわち、
【数式32】
により決定されることを特徴とする請求項50記載の試験方法。 - 前記係数Apは、線形回帰および指数回帰からなる群から選択された回帰により計算されることを特徴とする請求項48〜51のいずれか1項記載の試験方法。
- 請求項35の記載に従ってタイヤのドリフト角δを自動的に制御するとき、pの値を0.25〜0.75の間にすることを特徴とする請求項48〜50のいずれか1項記載の試験方法。
- 請求項36の記載に従ってタイヤのドリフト角δを自動的に制御するとき、pの値を0.5にすることを特徴とする請求項49〜51のいずれか1項記載の試験方法。
- 請求項1〜14および17〜54のいずれか1項記載の方法の洗練における調節変数として不変量「Invt」を使用することを特徴とする方法。
- タイヤの機能を所定の摩擦係数μの値に維持することを目的として、所与の形状でのタイヤの機能を自動的に制御する方法において、
・複数対の「i」の値についての評価または測定(Gi、μi)を決定する段階と、
・タイヤの固有の物理的特性および存在する実際の機能的形状の関数としてタイヤの最適スリップGOptの評価を計算する段階と、
・GinstantaneousとGOptとの差の関数として形状を自動的に制御する段階とを有することを特徴とする方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0207399A FR2841006A1 (fr) | 2002-06-13 | 2002-06-13 | Methode d'asservissement, utilisable notamment pour maintenir le glissement d'un pneu a un niveau optimal pour qu'il fonctionne a un niveau de coefficient d'adherence maximal |
| FR0209629A FR2842910A1 (fr) | 2002-07-29 | 2002-07-29 | Methode d'asservissement, utilisable pour maintenir le glissement d'un pneu a niveau optimal pour qu'il fonctionne a un niveau de coefficient d'adherence maximale. |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004249966A true JP2004249966A (ja) | 2004-09-09 |
| JP2004249966A5 JP2004249966A5 (ja) | 2006-07-27 |
Family
ID=29585790
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003198080A Pending JP2004249966A (ja) | 2002-06-13 | 2003-06-13 | タイヤが最大摩擦係数レベルで機能するようにタイヤのスリップを最適レベルに維持するのに特に使用できる自動制御方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US6923050B2 (ja) |
| EP (1) | EP1372049A1 (ja) |
| JP (1) | JP2004249966A (ja) |
| KR (1) | KR20030096047A (ja) |
| CN (1) | CN1477005A (ja) |
| BR (1) | BR0302119A (ja) |
| RU (1) | RU2003117475A (ja) |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6276189B1 (en) * | 1995-03-13 | 2001-08-21 | James Kevin Hurson | Method and apparatus for continuous monitoring of road surface friction |
| ATE293552T1 (de) * | 2002-06-13 | 2005-05-15 | Michelin Soc Tech | Stabilitätsregelungssystem eines fahrzeuges unter verwendung einer für alle reifen charakteristischen invarianzfunktion |
| KR20050075717A (ko) * | 2004-01-16 | 2005-07-21 | 소시에떼 드 테크놀로지 미쉐린 | 다른 매개 변수의 함수로써 편차의 평균 기울기를비교하는 알고리즘을 사용하여 차량의 안정성을 제어하기위한 시스템 |
| FR2865177A1 (fr) * | 2004-01-16 | 2005-07-22 | Michelin Soc Tech | Systeme de controle de la stabilite d'un vehicule utilisant un algorithme analysant la variation au cours du temps d'un parametre representatif. |
| FR2865176A1 (fr) * | 2004-01-16 | 2005-07-22 | Michelin Soc Tech | Systeme de controle de la stabilite d'un vehicule utilisant un algorithme comparant des pentes moyennes de variation d'un parametre en fonction d'un autre. |
| ATE345249T1 (de) * | 2004-01-16 | 2006-12-15 | Michelin Soc Tech | System zur stabilitätsregelung eines fahrzeugs mit mehreren prädiktiven algorithmen und einem auswahlprozess |
| FR2865175A1 (fr) * | 2004-01-16 | 2005-07-22 | Michelin Soc Tech | Systeme de controle de la stabilite d'un vehicule utilisant plusieurs algorithmes predictifs et un processus de selection. |
| FR2865285A1 (fr) * | 2004-01-16 | 2005-07-22 | Michelin Soc Tech | Systeme de test d'un pneumatique utilisant un algorithme comparant des pentes moyennes de variation d'un parametre en fontion d'un autre. |
| KR20050075708A (ko) * | 2004-01-16 | 2005-07-21 | 소시에떼 드 테크놀로지 미쉐린 | 소정 시간에 걸쳐 대표 매개변수의 편차를 분석한알고리즘을 사용하여 차량의 안정성을 제어하기 위한시스템 |
| US7114383B2 (en) * | 2005-01-07 | 2006-10-03 | Bridgestone Firestone North American Tire, Llc | Method and apparatus for monitoring tire performance |
| US20060173603A1 (en) * | 2005-02-02 | 2006-08-03 | Mohan Sankar K | Slip loss reduction control system for improving driveline efficiency |
| US7788007B2 (en) * | 2006-01-12 | 2010-08-31 | Gm Global Technology Operations, Inc. | Roll stability indicator for vehicle rollover control |
| JP5349736B2 (ja) * | 2006-01-30 | 2013-11-20 | Jx日鉱日石エネルギー株式会社 | ワックスの水素化分解方法 |
| DE102006018029A1 (de) * | 2006-04-19 | 2007-10-25 | Robert Bosch Gmbh | Vorrichtung und Verfahren zur Ansteuerung von Personenschutzmitteln |
| KR100784278B1 (ko) * | 2006-11-20 | 2007-12-12 | 한국타이어 주식회사 | 타이어 트레드의 표면온도 측정을 통한 편마모 평가방법 |
| FR2909946B1 (fr) * | 2006-12-13 | 2010-09-17 | Soc Tech Michelin | Procede d'estimation d'un risque de defaut de liaison au sol d'un vehicule automobile |
| FR2910417B1 (fr) | 2006-12-21 | 2012-07-06 | Messier Bugatti | Procede de commande adaptatif de freinage pour vehicule. |
| EP2137009A1 (en) * | 2007-03-16 | 2009-12-30 | Nira Dynamics AB | Use of suspension information in tire pressure deviation detection for a vehicle tire |
| FR2914744B1 (fr) * | 2007-04-06 | 2009-07-03 | Michelin Soc Tech | Procede de detection d'un phenomene d'hydroplanage d'un pneumatique sur une chaussee |
| DE102007046275A1 (de) | 2007-09-27 | 2009-04-16 | Siemens Ag | Elektrisches Antriebssystem |
| DE102007053256B3 (de) * | 2007-11-08 | 2009-07-09 | Continental Automotive Gmbh | Verfahren und Vorrichtung zum Ermitteln eines Reibwerts |
| JP5179999B2 (ja) * | 2008-08-12 | 2013-04-10 | 株式会社神戸製鋼所 | タイヤ試験機の駆動制御方法及びタイヤ試験機 |
| KR20130132818A (ko) | 2010-11-23 | 2013-12-05 | 브리지스톤 어메리카스 타이어 오퍼레이션스, 엘엘씨 | 진단 타이어 시험 방법 |
| CN108454597B (zh) * | 2018-01-03 | 2020-01-24 | 江苏大学 | 一种基于lqg控制器的车辆防抱死控制系统及滑移率抖动抑制方法 |
| CN108304638B (zh) * | 2018-01-26 | 2021-10-01 | 中国航空工业集团公司沈阳飞机设计研究所 | 一种受压状态下起飞的飞机轮胎最大下沉量计算方法 |
| EP4007889B1 (fr) * | 2019-08-01 | 2023-08-30 | Compagnie Generale Des Etablissements Michelin | Méthode d'estimation de la hauteur d'eau sur une chaussée lors du roulage d'un pneumatique |
| CN113830042A (zh) * | 2020-06-24 | 2021-12-24 | 广州汽车集团股份有限公司 | 一种汽车制动控制方法及系统 |
| CN115783252B (zh) * | 2023-02-08 | 2023-04-25 | 四川腾盾科技有限公司 | 一种低成本的无人机自主刹车压力控制计算方法 |
Citations (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04224447A (ja) * | 1990-04-02 | 1992-08-13 | Volkswagen Ag <Vw> | 車道と駆動している車両の車輪のタイヤとの間の摩擦結合を監視する方法 |
| JPH0539021A (ja) * | 1991-08-02 | 1993-02-19 | Nippon Denshi Kogyo Kk | アンチロツクブレーキ装置 |
| JPH07186928A (ja) * | 1993-12-24 | 1995-07-25 | Aisin Seiki Co Ltd | 車両走行路面の最大摩擦係数推定装置 |
| JPH08318842A (ja) * | 1995-05-29 | 1996-12-03 | Nissan Motor Co Ltd | アンチスキッド制御装置 |
| JPH1035443A (ja) * | 1996-07-18 | 1998-02-10 | Nissan Motor Co Ltd | 車体速および路面摩擦係数推定装置 |
| JPH1071943A (ja) * | 1996-08-30 | 1998-03-17 | Toyota Central Res & Dev Lab Inc | 制御開始判定方法 |
| JPH10114263A (ja) * | 1996-08-20 | 1998-05-06 | Toyota Central Res & Dev Lab Inc | アンチロックブレーキ制御装置、トルク勾配推定装置及び制動トルク勾配推定装置 |
| JPH1111292A (ja) * | 1997-06-20 | 1999-01-19 | Toyota Central Res & Dev Lab Inc | 車輪挙動量サーボ制御装置及び限界判定装置 |
| JPH1120649A (ja) * | 1997-06-27 | 1999-01-26 | Toyota Central Res & Dev Lab Inc | 路面状態演算装置 |
| JPH1178442A (ja) * | 1997-07-10 | 1999-03-23 | Sumitomo Rubber Ind Ltd | タイヤの摩耗状態検知装置および方法 |
| JP2001171504A (ja) * | 1999-12-16 | 2001-06-26 | Nissan Motor Co Ltd | 路面摩擦係数推定装置 |
| JP2001253334A (ja) * | 2000-03-09 | 2001-09-18 | Sumitomo Rubber Ind Ltd | 路面摩擦係数判定装置および方法 |
| JP2001334920A (ja) * | 2000-05-26 | 2001-12-04 | Sumitomo Rubber Ind Ltd | 路面摩擦係数判定装置および方法 |
| JP2002067843A (ja) * | 2000-08-29 | 2002-03-08 | Toyota Central Res & Dev Lab Inc | 衝突防止制御装置 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2433092C2 (de) * | 1974-07-10 | 1986-10-23 | Robert Bosch Gmbh, 7000 Stuttgart | Antiblockierregelsystem für Vierradfahrzeuge |
| DE3535843A1 (de) * | 1985-10-08 | 1987-04-16 | Bosch Gmbh Robert | Verfahren zur fortlaufenden bestimmung des kraftschlussbeiwerts (my) |
| US4947332A (en) * | 1989-09-27 | 1990-08-07 | General Motors Corporation | Road surface estimation |
| CA2023538C (en) * | 1990-05-17 | 2000-01-11 | Jean Francois Leon Fontaine | Tread for a pneumatic tire |
| DE4024815A1 (de) * | 1990-08-04 | 1992-02-13 | Bosch Gmbh Robert | Verfahren zur schaetzung der geschwindigkeit |
| DE4030724B4 (de) * | 1990-09-28 | 2005-05-04 | Robert Bosch Gmbh | Antiblockierregelsystem |
| DE4218034B4 (de) * | 1992-06-02 | 2006-05-24 | Dr.Ing.H.C. F. Porsche Ag | Verfahren zur Bestimmung des Kraftschlußpotentials eines Kraftfahrzeuges |
| EP0630786B1 (de) * | 1993-06-22 | 1996-10-09 | Siemens Aktiengesellschaft | Verfahren und Schaltungsanordnung zum Ermitteln des Reibwerts |
| DE4435448B4 (de) * | 1993-10-13 | 2007-10-11 | Volkswagen Ag | Verfahren zur permanenten Ermittlung des Fahrbahnreibwerts |
| JP3060863B2 (ja) * | 1994-12-14 | 2000-07-10 | トヨタ自動車株式会社 | 車両の挙動推定装置 |
| DE19526659C2 (de) * | 1995-07-21 | 2000-02-03 | Bosch Gmbh Robert | Verfahren und Vorrichtung zur Steuerung der Bremsanlage eines Fahrzeugs |
| DE19807880A1 (de) * | 1998-02-25 | 1999-09-09 | Daimler Chrysler Ag | Verfahren und Vorrichtung zur Überwachung des Reifenluftdrucks von Rädern eines Kraftfahrzeuges |
| SE523023C2 (sv) * | 2000-04-12 | 2004-03-23 | Nira Dynamics Ab | Metod och anordning för att med rekursiv filtrering bestämma en fysikalisk parameter hos ett hjulfordon |
| SE0002213D0 (sv) * | 2000-04-12 | 2000-06-13 | Nira Automotive Ab | Tire pressure computation system |
| US6550320B1 (en) * | 2000-05-31 | 2003-04-22 | Continental Ag | System and method for predicting tire forces using tire deformation sensors |
| US6285280B1 (en) * | 2000-06-26 | 2001-09-04 | Robert Bosch Corporation | Method for detecting a deflated tire on a vehicle |
| JP3458839B2 (ja) * | 2000-11-20 | 2003-10-20 | トヨタ自動車株式会社 | 路面の最大摩擦係数推定装置 |
| US20040225423A1 (en) * | 2003-05-07 | 2004-11-11 | Carlson Christopher R. | Determination of operational parameters of tires in vehicles from longitudinal stiffness and effective tire radius |
-
2003
- 2003-06-04 EP EP03012681A patent/EP1372049A1/fr not_active Withdrawn
- 2003-06-11 RU RU2003117475/11A patent/RU2003117475A/ru not_active Application Discontinuation
- 2003-06-12 BR BR0302119-0A patent/BR0302119A/pt not_active Application Discontinuation
- 2003-06-12 KR KR10-2003-0037847A patent/KR20030096047A/ko not_active Application Discontinuation
- 2003-06-12 US US10/460,007 patent/US6923050B2/en not_active Expired - Fee Related
- 2003-06-13 CN CNA031430015A patent/CN1477005A/zh active Pending
- 2003-06-13 JP JP2003198080A patent/JP2004249966A/ja active Pending
Patent Citations (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04224447A (ja) * | 1990-04-02 | 1992-08-13 | Volkswagen Ag <Vw> | 車道と駆動している車両の車輪のタイヤとの間の摩擦結合を監視する方法 |
| JPH0539021A (ja) * | 1991-08-02 | 1993-02-19 | Nippon Denshi Kogyo Kk | アンチロツクブレーキ装置 |
| JPH07186928A (ja) * | 1993-12-24 | 1995-07-25 | Aisin Seiki Co Ltd | 車両走行路面の最大摩擦係数推定装置 |
| JPH08318842A (ja) * | 1995-05-29 | 1996-12-03 | Nissan Motor Co Ltd | アンチスキッド制御装置 |
| JPH1035443A (ja) * | 1996-07-18 | 1998-02-10 | Nissan Motor Co Ltd | 車体速および路面摩擦係数推定装置 |
| JPH10114263A (ja) * | 1996-08-20 | 1998-05-06 | Toyota Central Res & Dev Lab Inc | アンチロックブレーキ制御装置、トルク勾配推定装置及び制動トルク勾配推定装置 |
| JPH1071943A (ja) * | 1996-08-30 | 1998-03-17 | Toyota Central Res & Dev Lab Inc | 制御開始判定方法 |
| JPH1111292A (ja) * | 1997-06-20 | 1999-01-19 | Toyota Central Res & Dev Lab Inc | 車輪挙動量サーボ制御装置及び限界判定装置 |
| JPH1120649A (ja) * | 1997-06-27 | 1999-01-26 | Toyota Central Res & Dev Lab Inc | 路面状態演算装置 |
| JPH1178442A (ja) * | 1997-07-10 | 1999-03-23 | Sumitomo Rubber Ind Ltd | タイヤの摩耗状態検知装置および方法 |
| JP2001171504A (ja) * | 1999-12-16 | 2001-06-26 | Nissan Motor Co Ltd | 路面摩擦係数推定装置 |
| JP2001253334A (ja) * | 2000-03-09 | 2001-09-18 | Sumitomo Rubber Ind Ltd | 路面摩擦係数判定装置および方法 |
| JP2001334920A (ja) * | 2000-05-26 | 2001-12-04 | Sumitomo Rubber Ind Ltd | 路面摩擦係数判定装置および方法 |
| JP2002067843A (ja) * | 2000-08-29 | 2002-03-08 | Toyota Central Res & Dev Lab Inc | 衝突防止制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| BR0302119A (pt) | 2004-09-08 |
| US20040024514A1 (en) | 2004-02-05 |
| US6923050B2 (en) | 2005-08-02 |
| RU2003117475A (ru) | 2004-12-20 |
| CN1477005A (zh) | 2004-02-25 |
| KR20030096047A (ko) | 2003-12-24 |
| EP1372049A1 (fr) | 2003-12-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2004249966A (ja) | タイヤが最大摩擦係数レベルで機能するようにタイヤのスリップを最適レベルに維持するのに特に使用できる自動制御方法 | |
| JP2004249965A (ja) | 全てのタイヤを特徴付ける不変量を用いた自動安定性制御システム | |
| JP6921096B2 (ja) | 車両のアンチロックブレーキ及びアンチスリップレギュレーションの性能を向上させるためのデバイス並びに方法 | |
| EP2927065B1 (en) | Road surface friction and surface type estimation system and method | |
| US7197380B2 (en) | System for controlling the stability of a vehicle using an algorithm comparing average slopes of variation of a parameter | |
| EP2927066B1 (en) | Model-based longitudinal stiffness estimation system and method | |
| KR101797939B1 (ko) | 타이어 분류 | |
| EP1719676B1 (en) | System and method for tire/road friction estimation | |
| US7225072B2 (en) | System for controlling the stability of a vehicle using several predictive algorithms and a selection process | |
| US7426431B2 (en) | System for controlling the stability of a vehicle using an algorithm analyzing the variation in a representative parameter over time | |
| EP3017971B1 (en) | Tire sensor-based vehicle control system optimization and method | |
| US7725235B2 (en) | Slip-control method and device | |
| JP2008539112A (ja) | スリップ調節器を用いたレール車両のための適応滑走保護 | |
| KR20080105032A (ko) | 차량 특성 결정 방법 | |
| JP4250216B2 (ja) | 車両のブレーキ装置の制御方法及び装置 | |
| WO2004016485A1 (en) | Vehicle control making use of a road surface tire interacting model | |
| JP4876759B2 (ja) | タイヤの制駆動時動特性評価方法および装置 | |
| JP2005292121A (ja) | 一パラメータの変動の平均勾配を別のパラメータの関数として比較するアルゴリズムを用いてタイヤを試験するシステム | |
| JP4390864B2 (ja) | 車両の少なくとも1つの走行動特性変数の制御方法および装置 | |
| Isermann et al. | Tire Traction and Force Transfer | |
| JP2023004904A (ja) | 大型車の推進を制御するための方法 | |
| JP2008238956A (ja) | 状態推定装置、自動車および状態推定方法 | |
| JP2005313872A (ja) | 一パラメータの変動の平均勾配を別のパラメータの関数として比較するアルゴリズムを用いて車両の安定性を制御するシステム | |
| FR2842910A1 (fr) | Methode d'asservissement, utilisable pour maintenir le glissement d'un pneu a niveau optimal pour qu'il fonctionne a un niveau de coefficient d'adherence maximale. | |
| JP2005315849A (ja) | 経時的に代表的なパラメータの変動を分析するアルゴリズムを用いてタイヤを試験するシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060609 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060609 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080825 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20081215 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090608 |