CN112714658A - 动态刚性化复合医疗结构 - Google Patents
动态刚性化复合医疗结构 Download PDFInfo
- Publication number
- CN112714658A CN112714658A CN201980061388.7A CN201980061388A CN112714658A CN 112714658 A CN112714658 A CN 112714658A CN 201980061388 A CN201980061388 A CN 201980061388A CN 112714658 A CN112714658 A CN 112714658A
- Authority
- CN
- China
- Prior art keywords
- rigidizing
- layer
- braid
- pressure
- vacuum
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 239000002131 composite material Substances 0.000 title description 7
- 239000010410 layer Substances 0.000 claims description 531
- 238000000034 method Methods 0.000 claims description 148
- 239000012791 sliding layer Substances 0.000 claims description 48
- 230000003014 reinforcing effect Effects 0.000 claims description 46
- 230000007704 transition Effects 0.000 claims description 27
- 210000001035 gastrointestinal tract Anatomy 0.000 claims description 25
- 210000002216 heart Anatomy 0.000 claims description 25
- 230000003213 activating effect Effects 0.000 claims description 22
- -1 polyethylene terephthalate Polymers 0.000 claims description 13
- 229910001220 stainless steel Inorganic materials 0.000 claims description 13
- 210000003734 kidney Anatomy 0.000 claims description 11
- 210000004072 lung Anatomy 0.000 claims description 11
- 229920000139 polyethylene terephthalate Polymers 0.000 claims description 11
- 239000005020 polyethylene terephthalate Substances 0.000 claims description 11
- 239000010935 stainless steel Substances 0.000 claims description 11
- 230000008859 change Effects 0.000 claims description 10
- 239000000843 powder Substances 0.000 claims description 10
- 238000007789 sealing Methods 0.000 claims description 10
- 210000004556 brain Anatomy 0.000 claims description 9
- 238000009954 braiding Methods 0.000 abstract description 6
- 210000003484 anatomy Anatomy 0.000 description 45
- 238000005452 bending Methods 0.000 description 45
- 230000004913 activation Effects 0.000 description 42
- 239000012530 fluid Substances 0.000 description 34
- 210000004115 mitral valve Anatomy 0.000 description 34
- 239000011248 coating agent Substances 0.000 description 31
- 238000000576 coating method Methods 0.000 description 31
- 230000033001 locomotion Effects 0.000 description 30
- 239000000835 fiber Substances 0.000 description 28
- 238000011282 treatment Methods 0.000 description 28
- 238000007459 endoscopic retrograde cholangiopancreatography Methods 0.000 description 18
- 229920002635 polyurethane Polymers 0.000 description 16
- 239000004814 polyurethane Substances 0.000 description 16
- 239000000463 material Substances 0.000 description 15
- 239000011159 matrix material Substances 0.000 description 15
- 230000008439 repair process Effects 0.000 description 15
- 210000000013 bile duct Anatomy 0.000 description 14
- 230000001965 increasing effect Effects 0.000 description 14
- 210000001519 tissue Anatomy 0.000 description 14
- 229920001971 elastomer Polymers 0.000 description 13
- 239000010408 film Substances 0.000 description 13
- 210000001595 mastoid Anatomy 0.000 description 13
- 210000005246 left atrium Anatomy 0.000 description 12
- 239000012528 membrane Substances 0.000 description 12
- 210000004379 membrane Anatomy 0.000 description 12
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 12
- 230000000747 cardiac effect Effects 0.000 description 10
- 208000027418 Wounds and injury Diseases 0.000 description 9
- 239000012298 atmosphere Substances 0.000 description 9
- 238000002052 colonoscopy Methods 0.000 description 9
- 238000003384 imaging method Methods 0.000 description 9
- 239000000523 sample Substances 0.000 description 9
- 210000005166 vasculature Anatomy 0.000 description 9
- 230000006835 compression Effects 0.000 description 8
- 238000007906 compression Methods 0.000 description 8
- 230000007246 mechanism Effects 0.000 description 8
- 210000000277 pancreatic duct Anatomy 0.000 description 8
- 210000001765 aortic valve Anatomy 0.000 description 7
- 230000008901 benefit Effects 0.000 description 7
- 210000001072 colon Anatomy 0.000 description 7
- 238000013461 design Methods 0.000 description 7
- 239000000806 elastomer Substances 0.000 description 7
- 229920002725 thermoplastic elastomer Polymers 0.000 description 7
- 238000012323 Endoscopic submucosal dissection Methods 0.000 description 6
- 239000004433 Thermoplastic polyurethane Substances 0.000 description 6
- 239000000853 adhesive Substances 0.000 description 6
- 230000001070 adhesive effect Effects 0.000 description 6
- 210000004204 blood vessel Anatomy 0.000 description 6
- 239000007789 gas Substances 0.000 description 6
- 238000004519 manufacturing process Methods 0.000 description 6
- 229920001296 polysiloxane Polymers 0.000 description 6
- 238000005096 rolling process Methods 0.000 description 6
- 239000005060 rubber Substances 0.000 description 6
- 210000002784 stomach Anatomy 0.000 description 6
- 238000001356 surgical procedure Methods 0.000 description 6
- 229920002803 thermoplastic polyurethane Polymers 0.000 description 6
- 238000012800 visualization Methods 0.000 description 6
- 239000004696 Poly ether ether ketone Substances 0.000 description 5
- 238000004873 anchoring Methods 0.000 description 5
- JUPQTSLXMOCDHR-UHFFFAOYSA-N benzene-1,4-diol;bis(4-fluorophenyl)methanone Chemical compound OC1=CC=C(O)C=C1.C1=CC(F)=CC=C1C(=O)C1=CC=C(F)C=C1 JUPQTSLXMOCDHR-UHFFFAOYSA-N 0.000 description 5
- 230000006378 damage Effects 0.000 description 5
- 230000009977 dual effect Effects 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- 230000002496 gastric effect Effects 0.000 description 5
- 230000003902 lesion Effects 0.000 description 5
- 229920002530 polyetherether ketone Polymers 0.000 description 5
- 230000005855 radiation Effects 0.000 description 5
- 230000002787 reinforcement Effects 0.000 description 5
- 210000005245 right atrium Anatomy 0.000 description 5
- 210000000813 small intestine Anatomy 0.000 description 5
- 238000012546 transfer Methods 0.000 description 5
- 239000004677 Nylon Substances 0.000 description 4
- FAPWRFPIFSIZLT-UHFFFAOYSA-M Sodium chloride Chemical compound [Na+].[Cl-] FAPWRFPIFSIZLT-UHFFFAOYSA-M 0.000 description 4
- 238000013459 approach Methods 0.000 description 4
- 210000003157 atrial septum Anatomy 0.000 description 4
- 210000004351 coronary vessel Anatomy 0.000 description 4
- 238000001839 endoscopy Methods 0.000 description 4
- 238000005286 illumination Methods 0.000 description 4
- 238000002844 melting Methods 0.000 description 4
- 230000008018 melting Effects 0.000 description 4
- 229910052751 metal Inorganic materials 0.000 description 4
- 239000002184 metal Substances 0.000 description 4
- 229920001778 nylon Polymers 0.000 description 4
- 229920003023 plastic Polymers 0.000 description 4
- 239000004033 plastic Substances 0.000 description 4
- 229920001343 polytetrafluoroethylene Polymers 0.000 description 4
- 239000004810 polytetrafluoroethylene Substances 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 230000002829 reductive effect Effects 0.000 description 4
- 230000011514 reflex Effects 0.000 description 4
- 230000006641 stabilisation Effects 0.000 description 4
- 238000011105 stabilization Methods 0.000 description 4
- 238000002627 tracheal intubation Methods 0.000 description 4
- 230000001131 transforming effect Effects 0.000 description 4
- 210000001631 vena cava inferior Anatomy 0.000 description 4
- 238000013022 venting Methods 0.000 description 4
- PEDCQBHIVMGVHV-UHFFFAOYSA-N Glycerine Chemical compound OCC(O)CO PEDCQBHIVMGVHV-UHFFFAOYSA-N 0.000 description 3
- 210000002376 aorta thoracic Anatomy 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 3
- 210000001715 carotid artery Anatomy 0.000 description 3
- 230000001684 chronic effect Effects 0.000 description 3
- 238000004891 communication Methods 0.000 description 3
- 238000002788 crimping Methods 0.000 description 3
- 238000007598 dipping method Methods 0.000 description 3
- 230000002183 duodenal effect Effects 0.000 description 3
- 210000001198 duodenum Anatomy 0.000 description 3
- 238000012326 endoscopic mucosal resection Methods 0.000 description 3
- 238000002674 endoscopic surgery Methods 0.000 description 3
- 230000002708 enhancing effect Effects 0.000 description 3
- 229920002313 fluoropolymer Polymers 0.000 description 3
- 239000004811 fluoropolymer Substances 0.000 description 3
- 238000002594 fluoroscopy Methods 0.000 description 3
- 230000002209 hydrophobic effect Effects 0.000 description 3
- 238000003780 insertion Methods 0.000 description 3
- 230000037431 insertion Effects 0.000 description 3
- 238000011068 loading method Methods 0.000 description 3
- 229920001684 low density polyethylene Polymers 0.000 description 3
- 239000004702 low-density polyethylene Substances 0.000 description 3
- 239000000314 lubricant Substances 0.000 description 3
- 230000001050 lubricating effect Effects 0.000 description 3
- 229910001000 nickel titanium Inorganic materials 0.000 description 3
- 238000005192 partition Methods 0.000 description 3
- 238000002432 robotic surgery Methods 0.000 description 3
- 239000011780 sodium chloride Substances 0.000 description 3
- 238000005507 spraying Methods 0.000 description 3
- 239000003351 stiffener Substances 0.000 description 3
- 239000000454 talc Substances 0.000 description 3
- 229910052623 talc Inorganic materials 0.000 description 3
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 description 3
- 229910052721 tungsten Inorganic materials 0.000 description 3
- 239000010937 tungsten Substances 0.000 description 3
- 238000004804 winding Methods 0.000 description 3
- 229920002799 BoPET Polymers 0.000 description 2
- 229920000049 Carbon (fiber) Polymers 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- 206010018001 Gastrointestinal perforation Diseases 0.000 description 2
- 229920000271 Kevlar® Polymers 0.000 description 2
- 239000005041 Mylar™ Substances 0.000 description 2
- 239000004698 Polyethylene Substances 0.000 description 2
- 206010039897 Sedation Diseases 0.000 description 2
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 2
- 229910052782 aluminium Inorganic materials 0.000 description 2
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 2
- 210000000709 aorta Anatomy 0.000 description 2
- 239000004760 aramid Substances 0.000 description 2
- 229920003235 aromatic polyamide Polymers 0.000 description 2
- 239000004917 carbon fiber Substances 0.000 description 2
- 239000002872 contrast media Substances 0.000 description 2
- 238000005520 cutting process Methods 0.000 description 2
- 239000008367 deionised water Substances 0.000 description 2
- 229910021641 deionized water Inorganic materials 0.000 description 2
- 201000010099 disease Diseases 0.000 description 2
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 2
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 2
- 210000002837 heart atrium Anatomy 0.000 description 2
- 230000023597 hemostasis Effects 0.000 description 2
- 208000014674 injury Diseases 0.000 description 2
- 238000013152 interventional procedure Methods 0.000 description 2
- 239000004761 kevlar Substances 0.000 description 2
- 239000004816 latex Substances 0.000 description 2
- 229920000126 latex Polymers 0.000 description 2
- 210000005240 left ventricle Anatomy 0.000 description 2
- 239000003550 marker Substances 0.000 description 2
- 230000000926 neurological effect Effects 0.000 description 2
- HLXZNVUGXRDIFK-UHFFFAOYSA-N nickel titanium Chemical compound [Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni] HLXZNVUGXRDIFK-UHFFFAOYSA-N 0.000 description 2
- 238000010422 painting Methods 0.000 description 2
- 239000002985 plastic film Substances 0.000 description 2
- 229920000573 polyethylene Polymers 0.000 description 2
- 238000003825 pressing Methods 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 238000002271 resection Methods 0.000 description 2
- 238000007790 scraping Methods 0.000 description 2
- 230000036280 sedation Effects 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- 238000002560 therapeutic procedure Methods 0.000 description 2
- 229920000785 ultra high molecular weight polyethylene Polymers 0.000 description 2
- 210000003462 vein Anatomy 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- 229920002261 Corn starch Polymers 0.000 description 1
- 229920001651 Cyanoacrylate Polymers 0.000 description 1
- 208000005189 Embolism Diseases 0.000 description 1
- JOYRKODLDBILNP-UHFFFAOYSA-N Ethyl urethane Chemical compound CCOC(N)=O JOYRKODLDBILNP-UHFFFAOYSA-N 0.000 description 1
- CWYNVVGOOAEACU-UHFFFAOYSA-N Fe2+ Chemical compound [Fe+2] CWYNVVGOOAEACU-UHFFFAOYSA-N 0.000 description 1
- 229920000106 Liquid crystal polymer Polymers 0.000 description 1
- 239000004977 Liquid-crystal polymers (LCPs) Substances 0.000 description 1
- MWCLLHOVUTZFKS-UHFFFAOYSA-N Methyl cyanoacrylate Chemical compound COC(=O)C(=C)C#N MWCLLHOVUTZFKS-UHFFFAOYSA-N 0.000 description 1
- 239000004697 Polyetherimide Substances 0.000 description 1
- 239000004642 Polyimide Substances 0.000 description 1
- PPBRXRYQALVLMV-UHFFFAOYSA-N Styrene Natural products C=CC1=CC=CC=C1 PPBRXRYQALVLMV-UHFFFAOYSA-N 0.000 description 1
- 229920001494 Technora Polymers 0.000 description 1
- 208000007536 Thrombosis Diseases 0.000 description 1
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 1
- 101150044878 US18 gene Proteins 0.000 description 1
- 229920000508 Vectran Polymers 0.000 description 1
- 239000004979 Vectran Substances 0.000 description 1
- 210000001015 abdomen Anatomy 0.000 description 1
- NIXOWILDQLNWCW-UHFFFAOYSA-N acrylic acid group Chemical group C(C=C)(=O)O NIXOWILDQLNWCW-UHFFFAOYSA-N 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 239000000654 additive Substances 0.000 description 1
- 230000000996 additive effect Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 230000004075 alteration Effects 0.000 description 1
- AZDRQVAHHNSJOQ-UHFFFAOYSA-N alumane Chemical group [AlH3] AZDRQVAHHNSJOQ-UHFFFAOYSA-N 0.000 description 1
- 210000000436 anus Anatomy 0.000 description 1
- 208000007474 aortic aneurysm Diseases 0.000 description 1
- 210000001367 artery Anatomy 0.000 description 1
- 230000000712 assembly Effects 0.000 description 1
- 238000000429 assembly Methods 0.000 description 1
- 238000010009 beating Methods 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 210000000621 bronchi Anatomy 0.000 description 1
- 239000002775 capsule Substances 0.000 description 1
- 238000007675 cardiac surgery Methods 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 238000012321 colectomy Methods 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 238000007596 consolidation process Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 239000000356 contaminant Substances 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 229920001577 copolymer Polymers 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 239000008120 corn starch Substances 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000012864 cross contamination Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 229910003460 diamond Inorganic materials 0.000 description 1
- 239000010432 diamond Substances 0.000 description 1
- 238000002224 dissection Methods 0.000 description 1
- 239000012153 distilled water Substances 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 230000002526 effect on cardiovascular system Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 229920001746 electroactive polymer Polymers 0.000 description 1
- 230000003073 embolic effect Effects 0.000 description 1
- 238000002181 esophagogastroduodenoscopy Methods 0.000 description 1
- 230000001747 exhibiting effect Effects 0.000 description 1
- 229920000295 expanded polytetrafluoroethylene Polymers 0.000 description 1
- 239000004744 fabric Substances 0.000 description 1
- 210000001105 femoral artery Anatomy 0.000 description 1
- 210000003191 femoral vein Anatomy 0.000 description 1
- 238000011049 filling Methods 0.000 description 1
- 238000010304 firing Methods 0.000 description 1
- 238000007667 floating Methods 0.000 description 1
- 239000006260 foam Substances 0.000 description 1
- 239000002783 friction material Substances 0.000 description 1
- 239000003365 glass fiber Substances 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 239000010931 gold Substances 0.000 description 1
- 239000008187 granular material Substances 0.000 description 1
- 239000004519 grease Substances 0.000 description 1
- 210000004013 groin Anatomy 0.000 description 1
- 210000003709 heart valve Anatomy 0.000 description 1
- 230000002706 hydrostatic effect Effects 0.000 description 1
- 210000003767 ileocecal valve Anatomy 0.000 description 1
- 210000003111 iliac vein Anatomy 0.000 description 1
- 239000007943 implant Substances 0.000 description 1
- 238000002513 implantation Methods 0.000 description 1
- 238000001727 in vivo Methods 0.000 description 1
- 208000015181 infectious disease Diseases 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 210000004971 interatrial septum Anatomy 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 230000002262 irrigation Effects 0.000 description 1
- 238000003973 irrigation Methods 0.000 description 1
- 238000005304 joining Methods 0.000 description 1
- 238000003475 lamination Methods 0.000 description 1
- 230000000670 limiting effect Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000005461 lubrication Methods 0.000 description 1
- 238000002595 magnetic resonance imaging Methods 0.000 description 1
- 210000000713 mesentery Anatomy 0.000 description 1
- 239000011185 multilayer composite material Substances 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- RVTZCBVAJQQJTK-UHFFFAOYSA-N oxygen(2-);zirconium(4+) Chemical compound [O-2].[O-2].[Zr+4] RVTZCBVAJQQJTK-UHFFFAOYSA-N 0.000 description 1
- 210000000496 pancreas Anatomy 0.000 description 1
- 230000036961 partial effect Effects 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 230000037361 pathway Effects 0.000 description 1
- 239000008188 pellet Substances 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 229920006255 plastic film Polymers 0.000 description 1
- 229920001230 polyarylate Polymers 0.000 description 1
- 239000004417 polycarbonate Substances 0.000 description 1
- 229920000515 polycarbonate Polymers 0.000 description 1
- 229920000728 polyester Polymers 0.000 description 1
- 229920001601 polyetherimide Polymers 0.000 description 1
- 229920001721 polyimide Polymers 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- 229920000098 polyolefin Polymers 0.000 description 1
- 229920000915 polyvinyl chloride Polymers 0.000 description 1
- 239000004800 polyvinyl chloride Substances 0.000 description 1
- 238000005381 potential energy Methods 0.000 description 1
- 229940071643 prefilled syringe Drugs 0.000 description 1
- 210000001187 pylorus Anatomy 0.000 description 1
- 210000002321 radial artery Anatomy 0.000 description 1
- 238000007634 remodeling Methods 0.000 description 1
- 238000012552 review Methods 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 229910001285 shape-memory alloy Inorganic materials 0.000 description 1
- 238000010008 shearing Methods 0.000 description 1
- 238000002579 sigmoidoscopy Methods 0.000 description 1
- 229910052709 silver Inorganic materials 0.000 description 1
- 239000004332 silver Substances 0.000 description 1
- 239000002356 single layer Substances 0.000 description 1
- 239000002904 solvent Substances 0.000 description 1
- 238000007464 sphincterotomy Methods 0.000 description 1
- 238000010561 standard procedure Methods 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 239000004950 technora Substances 0.000 description 1
- 230000001225 therapeutic effect Effects 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
- 210000001042 thoracic artery Anatomy 0.000 description 1
- 239000010936 titanium Substances 0.000 description 1
- 229910052719 titanium Inorganic materials 0.000 description 1
- 238000012876 topography Methods 0.000 description 1
- 210000003437 trachea Anatomy 0.000 description 1
- 230000008733 trauma Effects 0.000 description 1
- 238000002604 ultrasonography Methods 0.000 description 1
- 210000002438 upper gastrointestinal tract Anatomy 0.000 description 1
- 210000000626 ureter Anatomy 0.000 description 1
- 210000003708 urethra Anatomy 0.000 description 1
- 230000002861 ventricular Effects 0.000 description 1
- 238000005406 washing Methods 0.000 description 1
- 239000002759 woven fabric Substances 0.000 description 1
Images



































































































































































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0043—Catheters; Hollow probes characterised by structural features
- A61M25/005—Catheters; Hollow probes characterised by structural features with embedded materials for reinforcement, e.g. wires, coils, braids
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0097—Catheters; Hollow probes characterised by the hub
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0102—Insertion or introduction using an inner stiffening member, e.g. stylet or push-rod
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0133—Tip steering devices
- A61M25/0147—Tip steering devices with movable mechanical means, e.g. pull wires
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00064—Constructional details of the endoscope body
- A61B1/00071—Insertion part of the endoscope body
- A61B1/00078—Insertion part of the endoscope body with stiffening means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00131—Accessories for endoscopes
- A61B1/00135—Oversleeves mounted on the endoscope prior to insertion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0043—Catheters; Hollow probes characterised by structural features
- A61M2025/0063—Catheters; Hollow probes characterised by structural features having means, e.g. stylets, mandrils, rods or wires to reinforce or adjust temporarily the stiffness, column strength or pushability of catheters which are already inserted into the human body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0133—Tip steering devices
- A61M25/0147—Tip steering devices with movable mechanical means, e.g. pull wires
- A61M2025/015—Details of the distal fixation of the movable mechanical means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/09—Guide wires
- A61M2025/0915—Guide wires having features for changing the stiffness
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0043—Catheters; Hollow probes characterised by structural features
- A61M25/0045—Catheters; Hollow probes characterised by structural features multi-layered, e.g. coated
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0043—Catheters; Hollow probes characterised by structural features
- A61M25/005—Catheters; Hollow probes characterised by structural features with embedded materials for reinforcement, e.g. wires, coils, braids
- A61M25/0051—Catheters; Hollow probes characterised by structural features with embedded materials for reinforcement, e.g. wires, coils, braids made from fenestrated or weakened tubing layer
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/06—Body-piercing guide needles or the like
- A61M25/0662—Guide tubes
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Hematology (AREA)
- Pulmonology (AREA)
- Anesthesiology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Biophysics (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Mechanical Engineering (AREA)
- Media Introduction/Drainage Providing Device (AREA)
- Endoscopes (AREA)
Abstract
一种刚性化装置,其包括细长柔性管、位于细长柔性管之上的编织层、位于柔性管和编织层之上的外层、以及位于细长柔性管和外层之间且能够附接到真空源或压力源的入口。编织层具有编织在一起的多股股线,其编织角相对于细长柔性管为直的时的纵轴线呈5‑40度。所述刚性化装置被构造为:当通过入口施加真空或压力时具有刚性构型,并且当不通过入口施加真空或压力时具有柔性构型。所述编织角构造为当刚性化装置处于柔性构型时随着刚性化装置弯曲而变化。
Description
相关申请的交叉引用
本申请要求下列专利申请的优先权:于2019年4月17日提交的标题为“DYNAMICALLY RIGIDIZING COMPOSITE MEDICAL STRUCTURES”的美国临时申请62/835,101;于2019年5月29日提交的标题为“DYNAMICALLY RIGIDIZING COMPOSITE MEDICALSTRUCTURES”的美国临时申请62/854,199;于2018年12月17日提交的标题为“DYNAMICALLYRIGIDIZING COMPOSITE MEDICAL STRUCTURES”的美国临时申请62/780,820;以及于2018年7月19日提交的标题为“BRAIDED DYNAMICALLY RIGIDIZING OVERTUBE”的美国临时专利申请62/700,760。这些专利申请的内容均通过引用合并于此。
本申请还可能涉及于2018年7月19日提交的标题为“DYNAMICALLY RIGIDIZINGOVERTUBE”的国际专利申请PCT/US2018/042946。此国际专利申请要求下列美国临时专利申请的优先权:于2018年5月16日提交的标题为“DYNAMICALLY RIGIDIZING OVERTUBE”的美国临时专利申请62/672,444以及于2017年7月20日提交的标题为“DYNAMICALLY RIGIDIZINGOVERTUBE”的美国临时专利申请62/535,134。这些专利申请的内容均通过引用合并于此。
本申请还可能涉及于2018年3月2日提交的标题为“DEVICE FOR ENDOSCOPICADVANCEMENT THROUGH THE SMALL INTESTINE”,现美国专利申请公开号为US2018/0271354的美国专利申请15/757,230,其是根据35USC 371在2016年9月2日提交的申请号为PCT/US2016/050290、标题为“DEVICE FOR ENDOSCOPIC ADVANCEMENT THROUGH THE SMALLINTESTINE”的国际专利申请的的国家阶段申请,该国际申请要求下列临时专利申请的优先权:于2016年5月20日提交的标题为“DEVICE FOR ENDOSCOPIS ADVANCEMENT THROUGH THESMALL INTESTINE”的美国临时申请62,339,593以及于2015年9月3日提交的标题为“DEVICEFOR ENDOSCOPIC ADVANCEMENT THROUGH THE SMALL INTESTINE”的美国临时申请62/213,908。这些专利申请的内容均通过引用合并于此。
通过援引加入
本说明书中提及的所有出版物和专利申请都以相同的程度通过引用并入本发明,其程度如同每个单独的出版物或专利申请被具体和单独地指出通过引用并入。
背景技术
在医疗手术中,介入式医疗装置可能会弯曲或环路穿过解剖结构,使得医疗装置的推进变得困难。
当内窥镜因胃肠道过度弯曲或回环而无法再前进时,会导致胃肠道环路,这是内窥镜检查所面临的一个众所周知的临床挑战。事实上,一项研究发现,在接受结肠镜检查的100名患者中,有91名患者出现了环路[Shah等人的“Magnetic Imaging of Colonoscopy:An Audit of Looping,Accuracy and Ancillary maneuvers.”Gastrointest Endosc2000;52:1-8]。胃肠道环路延长了手术时间,并可能导致患者疼痛,因为它会拉伸血管壁和肠系膜。此外,胃肠道环路导致胃肠道穿孔的发生率增加。在严重胃肠道环路时,完全的结肠镜检查是无法做到的,因为胃肠道环路会拉伸结肠的长度,导致结肠镜的长度不足以到达末端。胃肠道环路妨碍了对尖端(tip)的精准控制,从而导致使用者无法获得手柄与内窥镜尖端之间理想的一一对应的运动关系。此类问题通常发生在广泛的内窥镜手术中,包括结肠镜检查、食道胃十二指肠镜检查(EGD)、小肠镜检查、内窥镜逆行胰胆管造影术(ERCP))、介入性内窥镜检查(包括ESD(内窥镜黏膜下剥离术和EMR(内窥镜黏膜切除术))、机器人柔性内窥镜检查、经口机器人手术(TORS)、解剖改变病例(包括Roux-en-Y)以及NOTES(自然孔腔内窥镜外科)手术中。因此,需要一种有助于防止胃肠道环路的装置,以提供更成功的进入胃肠道的途径。
在推进医疗器械的过程中也会出现类似的困难,例如在肺、肾、脑、心脏空间以及其他解剖位置的介入手术中推进医疗器械的过程中。因此,需要一种能够安全、高效且精确地进入难以到达的解剖位置的装置。
发明内容
通常地,在一个实施例中,刚性化装置包括细长柔性管、位于细长柔性管之上的编织层、位于柔性管和编织层之上的外层以及位于柔性管和外层之间并附接到真空源或压力源的入口。编织层具有编织在一起的多股股线,其编织角相对于细长柔性管为直的时的纵轴线呈5-40度。刚性化装置被构造为:当通过入口施加真空或压力时具有刚性构型,当通过入口施加真空或压力时具有柔性构型。编织角被构造为当刚性化装置处于柔性状态时随着刚性化装置弯曲而变化。
本发明的该实施例和其他实施例可包括以下特征中的一个或多个。编织角可以在10度至35度之间。编织角可以在15度至25度之间。刚性构型下刚性化装置的刚度可以是柔性构型下刚性化装置刚度的至少两倍。刚性构型下刚性化装置的刚度可以是柔性构型下刚性化装置刚度的至少5倍。刚性化装置还可以包括邻近编织层的滑动层,并且该滑动层具有比编织层低的摩擦系数。细长柔性管可包括在其中延伸的加强元件。加强元件可包括线圈或多个环形元件。多股股线可以每英寸4-60根编织在一起。股线可包括聚对苯二甲酸乙二酯或不锈钢。编织层可相对于细长柔性管提供30-70%的覆盖率。多股股线可以包括96股或更多股。所述入口可被配置为连接到压力源,并且刚性化装置可进一步在其中包括囊层。囊层可被构造为当通过入口提供压力时被推向编织层。所述外层可进一步在其中包括多个加强元件。入口可以被构造为连接到真空源,并且外层可以是薄的柔性护套。刚性化装置可以进一步在编织层和外层之间包括径向间隙,间隙的厚度可以为0.00002-0.04英寸。刚性化装置可以进一步包括可转向的远端。刚性化装置可以包括在细长柔性管和外层之间的密封通道。密封通道可包括工作通道、线缆引导件或膨胀腔。
通常地,在一个实施例中,一种推进刚性化装置通过体腔的方法包括:(1)在刚性化装置处于柔性构型时将其插入体腔,其中所述刚性化装置包括细长柔性管、编织层以及外层,编织层具有编织在一起的多股股线,其编织角相对于细长柔性管为直的时的纵轴线呈5-40度,其中编织角被构造为当刚性化装置处于柔性构型时随着刚性化装置弯曲而变化;以及(2)当刚性化装置已经到达体腔中的期望位置时,通过激活柔性管和外层之间的真空或压力以将刚性化装置转变为比柔性构型硬刚性构型。
本发明的该实施例和其他实施例可包括以下特征中的一个或多个。所述方法可以进一步包括在激活真空或压力之后释放真空或压力以使刚性构型转变回柔性构型。编织角可以在10度至35度之间。编织角可以在15度至25度之间。该方法还可包括在刚性化装置处于刚性构型时使镜通过刚性化装置。该方法可以进一步包括使刚性化装置的可转向远端转向通过体腔。体腔可以在胃肠道中。体腔可以在心脏中。体腔可以在肾中。体腔可以在,肺中。体腔可以在大脑中。
通常地,在一个实施例中,刚性化装置包括细长柔性管、位于细长柔性管之上的编织层、位于柔性管和编织层之上的外层以及位于细长柔性管和外层之间并被构造为附接到真空源或压力源的入口。刚性化装置构造为:当通过入口施加真空或压力时具有刚性构型,当不通过入口施加真空或压力时具有柔性构型。刚性构型时刚性化装置的刚度与柔性构型时刚性化装置的刚度之比大于5。
本发明的该实施例和其他实施例可包括以下特征中的一个或多个。上述比可以大于6。所述比可以大于10。编织层可具有编织在一起的多股股线,其编织角相对于细长柔性管为直的时的纵轴线呈5-40度。编织角可以在10度至35度之间。刚性化装置还可以包括邻近编织层的滑动层,并且该滑动层具有比编织层低的摩擦系数。细长柔性管可包括在其中延伸的加强元件。加强元件可包括线圈或多个环形元件。编织层可包括以每英寸4-60根编织在一起的多股股线。编织层可以包括编织在一起的多股股线,并且股线可包括聚对苯二甲酸乙二酯或不锈钢。编织层可相对于细长柔性管提供30-70%的覆盖率。所述编织层可以包括编织在一起的96股或更多股。入口可被构造为连接到压力源。刚性化装置可进一步在其中包括囊层,囊层可被构造为当通过入口提供压力时被推向编织层。外层可进一步在其中包括多个加强元件。入口可以被构造为附接到真空源。所述外层可以是薄的柔性护套。刚性化装置可以进一步在编织层和外层之间包括径向间隙。间隙的厚度可以为0.00002-0.04英寸。刚性化装置可以进一步包括可转向远端。刚性化装置可进一步包括在细长柔性管和外层之间的密封通道。密封通道可包括工作通道,线缆引导件或膨胀腔。
通常地,在一个实施例中,一种推进刚性化装置通过体腔的方法包括:(1)在刚性化装置处于柔性构型时将其插入体腔,其中所述刚性化装置包括细长柔性管、编织层以及外层;以及(2)当刚性化装置已经到达体腔中的期望位置时,通过激活柔性管和外层之间的真空或压力以将刚性化装置转变为比柔性构型硬的刚性构型。刚性构型下所述刚性化装置的刚度与柔性构型时所述刚性化装置的刚度之比大于5。
本发明的该实施例和其他实施例可包括以下特征中的一个或多个。该方法还可进一步包括通过在激活真空或压力后释放真空或压力,以将刚性构型转换回柔性构型。所述比可大于6。所述比可大于10。该方法还可包括在刚性化装置处于刚性构型时让镜通过刚性化装置。该方法可以进一步包括使刚性化装置的可转向远端转向通过体腔。体腔可以在胃肠道中。体腔可以在心脏中。体腔可以在肾中。体腔可以在肺中。体腔可以在大脑中。
通常地,在一个实施例中,刚性化装置包括细长柔性管、位于所述细长柔性管径向外侧的编织层、邻近所述编织层的滑动层、外层以及在细长柔性管和所述外层之间的真空或压力入口。外层位于柔性管、编织层和滑动层之上。入口被构造为附接至真空源或压力源。刚性化装置构造为:当通过入口施加真空或压力时具有刚性构型,当不通过入口施加真空或压力时具有柔性构型。滑动层被构造为当刚性化装置处于柔性构型时,可减少编织层与细长柔性管或编织层与外层之间的摩擦。
本发明的该实施例和其他实施例可包括以下特征中的一个或多个。滑动层可具有比所述编织层低的摩擦系数。滑动层可包括粉末。刚性化装置在刚性构型下的刚度为其柔性构型下刚度的至少2倍。刚性化装置在刚性构型下的刚度为其柔性构型下刚度的至少5倍。编织层可具有编织在一起的多股股线,其编织角相对于细长柔性管为直的时的纵轴线呈5-40度。编织角可以在10度至35度之间。细长柔性管可包括在其中延伸的加强元件。加强元件可包括线圈或多个环形元件。编织层可以包括以每英寸4-60根编织在一起的多股股线。编织层可包括编织在一起的多股股线,股线可包括聚对苯二甲酸乙二酯或不锈钢。编织层可相对于细长柔性管提供30-70%的覆盖率。编织层可以包括编织在一起的96股或更多股。入口可被构造为附接至压力源。刚性化装置可进一步在其中包括囊层。囊层可被构造为当通过入口提供压力时被推向编织层。外层可进一步在其中包括多个加强元件。入口可被构造为附接至真空源。外层可以是薄的柔性护套。刚性化装置可以进一步在编织层和外层之间包括径向间隙。间隙的厚度可以为0.00002-0.04英寸。刚性化装置可以进一步包括可转向的远端。刚性化装置可进一步包括位于细长柔性管和外层之间的密封通道。密封通道可包括工作通道、线缆引导件或膨胀腔。
通常地,在一个实施例中,一种推进刚性化装置通过体腔的方法包括:(1)在刚性化装置处于柔性构型时将刚性化装置插入体腔,其中刚性化装置包括细长柔性管、编织层、与编织层相邻的滑动层和外层,其中当刚性化装置处于柔性构型时,滑动层减小编织层与细长柔性管或编织层与外层之间的摩擦;以及(2)当刚性化装置已经到达体腔中的期望位置时,激活柔性管和护套之间的真空或压力,以将刚性化装置转变为比柔性构型状态硬的刚性构型。
本发明的该实施例和其他实施例可包括以下特征中的一个或多个。该方法还可进一步包括在激活真空或压力后释放真空或压力,以将刚性构型转换回柔性构型。滑动层可具有比所述编织层低的摩擦系数。滑动层可以包括粉末。该方法可进一步包括在刚性化装置处于刚性构型时使镜通过刚性化装置。该方法可以进一步包括使刚性化装置的可转向远端转向通过体腔。体腔可以在胃肠道中。体腔可以在心脏中。体腔可以在肾中。体腔可以在肺中。体腔可以在大脑中。
通常地,在一个实施例中,刚性化装置包括具有加强元件和基质的内细长柔性管、位于细长柔性管径向外部的编织层、位于编织层之上的外层、以及位于细长柔性管和外层之间的真空或压力入口,该真空或压力入口被构造为附接至真空或压力源。加强元件的宽度与厚度的宽高比超过5:1。所述刚性化装置构造为:当通过入口施加真空或压力时具有刚性构型,当不通过入口施加真空或压力时具有柔性构型。
本发明的该实施例和其他实施例可包括以下特征中的一个或多个。加强元件可以是线圈。加强元件可以包括多个闭合圈。闭合圈可包括多个口袋或缺口。加强元件可以包括波浪形线。加强元件可以是纤维或金属丝。加强元件的宽高比可以超过10:1。宽高比可以超过11:1。在细长柔性管中可以存在多个加强元件,每个加强元件之间的间距可以为0.0006英寸或更小。细长柔性管可进一步包括基质,加强元件嵌入在基质中。基质可以包括TPU或TPE。
通常地,在一个实施例中,一种推进刚性化装置通过体腔的方法包括:(1)在刚性化装置处于柔性构型时将刚性化装置插入体腔,刚性化装置包括:具有加强元件和基质的细长柔性管、编织层和外层,并且加强元件的宽度与厚度的宽高比超过10:1;以及(2)当刚性化装置已经到达体腔中的期望位置时,激活柔性管和外层之间的真空或压力,以将刚性化装置转变为比柔性构型硬的刚性构型。
本发明的该实施例和其他实施例可包括以下特征中的一个或多个。当施加真空或压力时,细长柔性管可以抵抗压缩。
通常地,在一个实施例中,刚性化装置包括细长柔性管、位于细长柔性管之上的编织层、位于柔性管和编织层之上的外层以及位于细长柔性管和外层之间并被构造为附接到真空源或压力源的入口。编织层具有编织在一起的多股股线。刚性化装置构造为:当通过入口施加真空或压力时具有刚性构型,当不通过入口施加真空或压力时具有柔性构型。股线的端部嵌入环形圈或被环形圈围绕,从而当刚性化装置处于柔性构型时,该环形圈允许端部的相对运动。
本发明的该实施例和其他实施例可包括以下特征中的一个或多个。环形圈可包括材料涂层。环形圈可包含硅树脂或氨基甲酸酯。环形圈的厚度约为0.005-0.250英寸。
通常地,在一个实施例中,一种推进刚性化装置通过体腔的方法包括:(1)在刚性化装置处于柔性构型时将刚性化装置插入体腔,其中刚性化装置包括细长柔性管、具有编织在一起的多股股线的编织层以及外层;以及(2)当刚性化装置已经到达体腔中的期望位置时,激活柔性管和护套之间的真空或压力,以将刚性化装置转变为比柔性构型硬的刚性构型。股线的端部嵌入环形圈或被环形圈围绕,从而当刚性化装置处于柔性构型时,端部相对于彼此运动。当刚性化装置处于刚性构型时,端部相对于彼此基本固定。
通常地,在一个实施例中,刚性化装置包括细长柔性管、位于细长柔性管之上的编织层、密封于柔性管和编织层之上的外层以及位于细长柔性管和外层之间并被构造为附接到真空源或压力源的入口。编织层具有编织在一起的多股股线以及编织在编织层中的多个环向纤维。刚性化装置被构造为当通过入口施加真空或压力时具有刚性构型,当不通过入口施加真空或压力时具有柔性构型。
通常地,在一个实施例中,一种推进刚性化装置通过体腔的方法包括:(1)在刚性化装置处于柔性构型时将刚性化装置插入体腔,其中刚性化装置包括细长柔性管、编织层和外层;以及(2)当刚性化装置已经到达体腔中的期望位置时,激活柔性管和外层间的真空,以将刚性化装置转变为比柔性构型硬的刚性构型。编织层包括编织在一起的多股股线和编织在编织层中的多个环向纤维。
通常地,在一个实施例中,刚性化装置包括细长柔性管、位于细长柔性管之上的囊层、位于囊层之上的编织层、位于柔性管及编织层之上的外层、位于囊层和细长柔性管之间的压力入口以及位于囊层和外层之间的通气出口。压力入口构造为连接至压力源。编织层包括多股编织在一起的股线。刚性化装置构造为:当通过入口施加真空或压力时实现刚性构型,当不通过入口施加真空或压力时实现柔性构型。当刚性化装置从柔性构型转变为刚性构型时,股线周围的流体或气体通过通气出口排出。
本发明的该实施例和其他实施例可包括以下特征中的一个或多个。刚性化装置还可包括连接到细长柔性管上的手柄。手柄可包括与所述通气出口连通的通气端口。
通常地,在一个实施例中,一种推进刚性化装置通过体腔的方法包括:(1)在刚性化装置处于柔性构型时将刚性化装置插入体腔,其中刚性化装置包括细长柔性管、囊层、具有编织在一起的多股股线的编织层以及外层;以及(2)当刚性化装置已经到达体腔中的期望位置时,通过细长柔性管和所述囊层之间的入口提供压力,并将股线周围的气体或流体通过通气出口排出,以将刚性化装置转变为比柔性构型硬的刚性构型。
通常地,在一个实施例中,刚性化装置包括细长柔性管、位于所述细长柔性管之上的编织层、位于柔性管和编织层之上的外层、在外层和细长柔性管之间延伸的通道以及入口。入口位于细长柔性管和外层之间并且构造为附接到真空源或压力源。通道包括工作通道、转向线缆通道或膨胀腔。刚性化装置被构造为:当通过入口施加真空或压力时具有刚性构型,当不通过入口施加真空或压力时具有柔性构型。
通常地,在一个实施例中,一种推进刚性化装置通过体腔的方法包括:(1)在刚性化装置处于柔性构型时将刚性化装置插入体腔,其中刚性化装置包括细长柔性管、编织层以及外层;(2)当刚性化装置已经到达体腔中的期望位置时,激活柔性管和外层间的真空或压力,以将刚性化装置转变为比柔性构型硬的刚性构型;以及(3)使医疗工具从位于细长柔性管和外层之间的密封工作通道中通过。
通常地,在一个实施例中,一种推进刚性化装置通过体腔的方法包括:(1)在刚性化装置处于柔性构型时将刚性化装置插入体腔,其中刚性化装置包括细长柔性管、编织层以及外层;(2)当刚性化装置已经到达体腔中的期望位置时,激活柔性管和外层间的真空或压力,以将刚性化装置转变为比柔性构型硬的刚性构型;以及(3)激活位于细长柔性管和所述外层之间的至少一根线缆,来为刚性化装置的远端定向。
通常地,在一个实施例中,一种推进刚性化装置通过体腔的方法包括:(1)在刚性化装置处于柔性构型时将刚性化装置插入体腔,其中刚性化装置包括细长柔性管、编织层以及外层;(2)当刚性化装置已经到达体腔中的期望位置时,激活柔性管和外层间的真空或压力,以将刚性化装置转变为比柔性构型硬的刚性构型;以及(3)通过使膨胀介质通过位于细长柔性管和外层之间的密封膨胀腔来使刚性化装置上的气囊膨胀。
通常地,在一个实施例中,刚性化装置包括具有中心腔的细长柔性管、位于细长柔性管之上的编织层、位于柔性管和编织层之上的外层、在中心腔中延伸的多个密封工作通道以及入口,入口位于细长柔性管和外层之间并且构造为附接至真空源或压力源。刚性化装置被构造为:当通过入口施加真空或压力时具有刚性构型,当不通过入口施加真空或压力时具有柔性构型。
通常地,在一个实施例中,一种推进刚性化装置通过体腔的方法包括:(1)在刚性化装置处于柔性构型时将刚性化装置插入体腔,其中刚性化装置包括细长柔性管、编织层以及外层;(2)当刚性化装置已经到达体腔中的期望位置时,激活柔性管和外层间的真空或压力,以将刚性化装置转变为比柔性构型硬的刚性构型;(3)使第一医疗工具从刚性化装置的第一密封工作通道中通过;以及(4)使第二医疗工具从刚性化装置的第二密封工作通道中通过。
通常地,在一个实施例中,外套管包括细长管和附接到细长管的远侧尖端。该远侧尖端具有环形远端面,远端面具有一个或多个从中延伸穿过的真空孔。一个或多个真空孔构造成在通过其施加真空时朝向环形远端面抽吸组织。
本发明的该实施例和其他实施例可包括以下特征中的一个或多个。细长管可以是刚性化装置,并且刚性化装置可以构造为当对其壁上施加真空或压力时具有刚性构型,而在不对其壁施加真空或压力时具有柔性构型。细长管可包括编织层和位于编织层之上的外层。环形远端面可以相对于细长管的纵向轴线成一定角度。
通常地,在一个实施例中,刚性化装置包括细长柔性管、位于细长柔性管之上的编织层、位于柔性管和编织层之上的外层以及与细长柔性管相连的远侧尖端。编织层具有以第一编织角编织在一起的多股股线,第一编织角是相对于细长柔性管为直的时的纵轴线而言的。远侧尖端包括第二编织层,该第二编织层具有以第二编织角编织在一起的多股股线,第二编织角与第一编织角不同。细长柔性管与外层之间的入口构造为附接至真空源或压力源。刚性化装置构造为:当通过入口施加真空或压力时具有刚性构型,当不通过入口施加真空或压力时具有柔性构型。
本发明的该实施例和其他实施例可包括以下特征中的一个或多个。第二编织角可以大于第一编织角。第一编织层和第二编织层可以彼此结合。
通常地,在一个实施例中,刚性化装置包括细长柔性管,该柔性管中包括多个加强元件。该细长柔性管包括近端部分和远端部分。编织层位于近端部分而不是远端部分上。编织层具有以第一编织角编织在一起的多股股线,第一编织角相对于细长柔性管为直的时的纵轴线而言。位于编织层之上的是外层。多个可转向联动装置在远端部分而非近端部分上延伸。细长柔性管与外层之间的入口构造为附接至真空源或压力源。刚性化装置构造为:当通过入口施加真空或压力时具有刚性构型,当不通过入口施加真空或压力时具有柔性构型。
本发明的该实施例和其他实施例可包括以下特征中一个或多个。刚性化装置可进一步包括连接到可转向联动装置上的多根线缆。线缆可在细长柔性管和外层之间延伸。
通常地,在一个实施例中,刚性化装置包括刚性化组件和多个联动装置。刚性化组件包括细长柔性管、位于细长柔性管之上的编织层、位于柔性管和编织层之上的外层以及入口。入口位于细长柔性管和外层之间并且构造成附接到真空源或压力源。多个转向联动装置安装在刚性化组件的远端部分上。刚性化组件构造为:当通过入口施加真空或压力时具有刚性构型,当不通过入口施加真空或压力时具有柔性构型。
本发明的该实施例和其他实施例可包括以下特征中的一个或多个。刚性化装置可进一步包括连接到可转向联动装置的多根线缆。线缆可在细长柔性管和外层之间延伸。
通常地,在一个实施例中,刚性化装置包括细长柔性管、多个可转向联动装置以及出口。细长柔性管包括近端部分和远端部分。该细长柔性管包括:多个加强元件、位于远端及近端部分之上的编织层、以及具有多个加强元件的外层。多个可转向联动装置在远端部分而不是近端部分上延伸。入口位于细长柔性管和外层之间并且构造成附接到真空源或压力源。编织层具有以第一编织角编织在一起的多股股线,第一编织角是相对于细长柔性管为直的时的纵轴线而言的。外层位于近端部分而非远端部分之上。刚性化装置构造为:当通过入口施加真空或压力时具有刚性构型,当不通过入口施加真空或压力时具有柔性构型。
本发明的该实施例和其他实施例可包括以下特征中的一个或多个。刚性化装置可进一步包括连接到可转向联动装置的多根线缆。线缆可在细长柔性管和外层之间延伸。
通常地,在一个实施例中,刚性化装置包括刚性化组件和多个联动装置。刚性化组件包括细长柔性管、位于细长柔性管之上的编织层、位于柔性管和编织层之上的外层以及入口,入口位于细长柔性管和外层之间并且构造成附接到真空源或压力源。脊状物延伸穿过刚性化组件的远端部分。脊状物被构造为使刚性化组件在设定方向上弯曲。多个转向联动装置位于刚性化组件的远侧。刚性化组件构造为:当通过入口施加真空或压力时具有刚性构型,当不通过入口施加真空或压力时具有柔性构型。
本发明的该实施例和其他实施例可包括以下特征中的一个或多个。刚性化装置还可包括拉丝,拉丝构造为在被激活时使所述装置在脊状物处弯曲。刚性化装置可进一步包括连接到可转向联动装置的多根线缆。线缆可在细长柔性管和外层之间延伸。
通常地,在一个实施例中,刚性化装置包括刚性化组件和远侧尖端。刚性化组件包括:细长柔性管;位于细长柔性管之上的编织层;位于柔性管和编织层之上的外层;以及入口,入口位于细长柔性管和外层之间并且构造成附接到真空源或压力源。远侧尖端附接至细长柔性管。远侧尖端包括在枢转点处连接在一起的多个联动装置。刚性化组件和远侧尖端构造为:当通过入口施加真空或压力时呈现刚性构型,当不通过入口施加真空或压力时呈现柔性构型。
通常地,在一个实施例中,一种与刚性化装置一起使用的手柄包括:手柄主体,其被构造为附接至刚性化装置;附接至手柄主体的真空进给管线,其被构造为与真空源连接;真空端口,其与刚性化装置的壁连通;以及手柄主体上的激活元件。激活元件被构造为在第一位置和第二位置之间移动。位于第一位置的激活元件将真空进给管线与真空端口连接,以向刚性化装置的壁提供真空,而位于第二位置的激活元件将真空进给管线与真空端口断开,以使刚性化装置的壁通气。
本发明的该实施例和其他实施例可包括以下特征中的一个或多个。激活元件可以包括其上的磁性元件。磁性元件可被构造为将激活元件保持在第一位置或第二位置。真空进给管线可以盘绕在手柄内。
通常地,在一个实施例中,一种推进刚性化装置通过体腔的方法包括:(1)握住刚性化装置的手柄;(2)在刚性化装置处于柔性构型时将刚性化装置的细长主体插入体腔;(3)当刚性化装置已经到达体腔中的期望位置时,沿第一方向移动激活元件以将手柄的真空进给管线和真空端口连接至细长主体的壁,使得真空流入细长主体的壁,从而将细长主体转变为刚性构型;以及(4)沿第二方向移动激活元件以使真空进给管线与真空端口断开连接,让细长主体通气从而将其转变为柔性构型。
通常地,在一个实施例中,一种与刚性化装置一起使用的手柄包括:被构造为附接到刚性化装置的手柄主体;位于手柄主体内的流体室;与流体室及刚性化装置的壁流体连通的出口;以及构造为在第一位置和第二位置之间移动的激活元件。激活元件被构造为当从第一位置移动至第二位置时将流体从流体室转移至刚性化装置的壁,并且当从第二位置移动至第一位置时将流体转移回流体室。
本发明的该实施例和其他实施例可包括以下特征中的一个或多个。手柄可以进一步包括手柄主体内的溢流室以及位于流体室和溢流室之间的减压阀。减压阀可构造为当流体室中的压力达到预定最大压力时打开,以允许流体流入溢流室。手柄可以进一步包括手柄主体内的活塞和滚动隔膜。活塞可被构造为当激活元件在第一位置和第二位置之间移动时推动滚动隔膜。
通常地,在一个实施例中,一种推进刚性化装置通过体腔的方法包括:(1)握住刚性化装置的手柄;(2)在刚性化装置处于柔性构型时将所述刚性化装置的细长主体插入体腔;(3)当所述刚性化装置已经到达体腔中的期望位置时,沿第一方向移动激活元件以将流体从手柄的流体室移动到刚性化元件的壁中,从而将刚性化装置转变成刚性构型;以及(4)沿第二方向移动激活元件以将流体从刚性化元件的壁移回到手柄中,从而将刚性化装置转变为柔性构型。
通常地,在一个实施例中,一种嵌套系统包括第一刚性化装置以及位于第一刚性化装置径向内部的第二刚性化装置。第二刚性化装置能够相对于第一刚性化装置轴向滑动。第一和第二刚性化装置构造为交替地通过真空或压力刚性化。
本发明的该实施例和其他实施例可包括以下特征中的一个或多个。压力可大于1个大气压。第一刚性化装置可构造为通过真空刚性化,第二刚性化装置可构造为通过大于1个大气压的压力刚性化。第一和第二刚性化装置均可包括多层。真空或压力可被构造为在多层之间供应。多层中的至少一层可以是编织层。
通常地,在一个实施例中,一种推进刚性化装置通过体腔的方法包括:(1)在第一刚性化装置处于柔性构型时将第一刚性化装置插入体腔;(2)向第一刚性化装置提供真空或压力,以将其转变成比柔性构型硬的刚性构型;(3)当第一刚性化装置处于刚性构型时,通过第一刚性化装置插入处于柔性构型的第二刚性化装置,使得第二刚性化装置呈现刚性构型下的第一刚性化装置的形状;以及(4)向第二刚性化装置提供真空或压力,以将第二刚性化装置从柔性构型转变为刚性构型。
本发明的该实施例和其他实施例可包括以下特征中一个或多个。每个刚性化装置可包括细长柔性管和编织层。可以通过提供真空或压力的方式压缩编织层,以将刚性化装置转变为刚性构型。
通常地,在一个实施例中,一种推进刚性化装置通过体腔的方法包括:(1)以柔性构型移动第一刚性化装置,直至第一刚性化装置到达期望位置;(2)在第一刚性化装置到达期望位置后,通过向第一刚性化装置提供真空或压力将其转变成刚性构型;(3)在第一刚性化装置被刚性化后,将处于柔性构型的第二刚性化装置在处于刚性构型的第一刚性化装置之上移动;(4)通过向所述第二刚性化装置提供真空或压力,将第二刚性化装置转变成刚性构型;(5)通过除去真空或压力将第一刚性化装置转变成柔性构型;以及(6)使处于柔性构型的第一刚性化装置穿过第二细长刚性化装置,直至第一刚性化装置到达期望位置。
本发明的该实施例和其他实施例可包括以下特征中的一个或多个。该方法可以进一步包括将第一和第二刚性化装置周期性地改变为柔性构型,以增大第一和第二刚性化装置的曲率从而与周围的解剖结构相匹配。
通常地,在一个实施例中,一种刚性化杆包括:内囊层;位于内囊层之上的编织层;密封在内囊层和编织层之上的外护套;以及位于外护套和内囊层之间的入口,该入口构造为附接至真空源。刚性化杆构造为:当通过入口施加真空或压力时具有刚性构型,当其不通过入口施加真空或压力时具有柔性构型。刚性化杆没有延伸穿过其中的通腔。
通常地,在一个实施例中,一种推进刚性化装置通过体腔的方法包括:(1)将刚性化装置推进通过体腔;(2)将柔性构型的杆插入到刚性化装置的腔中,杆包括细长柔性管、编织层和囊;(3)当杆到达刚性化装置的腔中的期望位置时,向杆的中心密封腔提供大于1个大气压的压力,以迫使编织层压向细长柔性管,从而将刚性化装置转变成比柔性构型硬的刚性构型;以及(4)当所述杆处于刚性构型时,在杆上进一步推进刚性化装置。
通常地,在一个实施例中,一种执行胆管镜检查的方法包括:(1)在外套管处于柔性构型时将其插入结肠,其中外套管包括细长柔性管、具有编织在一起的多股股线的编织层以及外层;(2)将外套管的远端朝乳突转向;(3)激活柔性管与外层之间的真空或压力,以将外套管转变成比柔性构型硬的刚性构型;(4)当外套管处于刚性构型时,将导丝推进通过外套管进入胆管或胰管;以及(5)在导丝上将镜推进至胆管或胰管。
通常地,在一个实施例中,一种接近心脏解剖结构的方法包括:(1)当护套处于柔性构型时将其插入心脏解剖结构,其中护套包括细长柔性管、具有编织在一起的多股股线的编织层以及外层;(2)将护套的远端朝期望的最终位置转向;(3)激活柔性管与外层之间的真空或压力,以使外套管转变成比柔性构型硬的刚性构型;以及(4)使心脏装置通过刚性护套。
本发明的该实施例和其他实施例可包括以下特征中的一个或多个。期望的最终位置可以是主动脉瓣。心脏装置可以是经导管主动脉瓣置换件。期望的最终位置也可以是二尖瓣。心脏装置也可以是二尖瓣置换件或二尖瓣修复元件。
本发明所述的任何装置均可包括以下一项或多项:刚性化装置可进一步包括邻近编织层的滑动层。滑动层可以具有比编织层低的摩擦系数。刚性构型下的刚性化装置可以比柔性构型下的刚性化装置至少硬2倍。刚性构型下的刚性化装置可以比柔性构型下的刚性化装置至少硬5倍。编织层具有编织在一起的多股股线,其编织角相对于细长柔性管为直的时的纵轴线呈5-40度。编织角可在10度至35度之间。细长柔性管可包括在其中延伸的加强元件。加强元件可以包括线圈或多个环形元件。编织层可包括以每英寸4-60根编织在一起的多股股线。编织层可包括编织在一起的多股股线。股线可包括聚对苯二甲酸乙二酯或不锈钢。编织层可相对于细长柔性管提供30-70%的覆盖率。编织层可以包括编织在一起的96股或更多股。入口可构造为附接至压力源。刚性化装置可进一步包括位于其中的囊层。囊层可构造为当通过入口提供压力时被推向编织层。外层可进一步包括多个加强元件。入口可构造为附接至真空源。外层可以是薄的柔性护套。刚性化装置可进一步包括在编织层与外层之间的径向间隙。间隙的厚度可为0.00002-0.04英寸。刚性化装置还可包括可转向的远端。刚性化装置还可包括位于细长柔性管与外层之间的密封通道。密封通道可包括工作通道、线缆引导件或膨胀腔。
本发明所述的任何方法可包括以下一项或多项:所述方法还可包括在激活真空或压力后释放真空或压力,以将刚性化装置转换回柔性构型。该方法可在胃肠道中进行。该方法可在心脏中进行。该方法可在肾中进行。该方法可在肺中进行。该方法可在大脑中进行。
附图说明
本发明的新颖特征特别地在权利要求中提及。通过参照阐述了利用本发明的原理的示例性实施方式的以下详细说明和附图将获得对本发明的特征和优点的更好理解,在附图中:
图1示出了一种刚性化装置。
图2A-2B示出了刚性化装置的部分编织层。
图3是将刚性化装置置于真空中时其弯曲力vs编织角的关系图。
图4A-4D示出了示例性的编织物形态(formation)。
图5A-5B示出了示例性的编织物形态。
图6A-6D示出了刚性化装置的编织层终端的各种设计。
图7示出了刚性化装置的内层。
图8A-8F示出了用于刚性化装置中某一层的不同的线圈设计。
图9A-9B示出了用于刚性化装置中某一层的波浪形加强元件。
图10A-10E示出了用于刚性化装置中某一层的缺口和口袋加强元件。
图11A-11B示出了用于刚性化装置中某一层的切割管加强元件。
图12A-12B示出了刚性化装置的示例性刚性化形状。
图13A-13D示出了示例性真空刚性化装置。
图14A-14B示出了示例性压力刚性化装置。
图15为刚性化装置的弯曲强度vs压力的关系图。
图16A-16O示出了压力刚性化装置的各种例子。
图17A-17D示出了包括并入的工作通道的刚性化装置。
图18A-18B示出了包括螺旋状工作通道的刚性化装置。
图19A-19B示出了包括多个螺旋状工作通道的刚性化装置。
图20A-20B示出了包括沿中心管腔向下延伸的多个工作通道的刚性化装置。
图21示出了一种刚性化装置,其工作通道延伸至其侧面。
图22示出了可以与诸如刚性化装置的装置的工作通道一起使用的工具。
图23示出了具有远端部分的刚性化装置。
图24示出了具有远端部分的刚性化装置,该远端部分具有与装置的近侧部分相独立的编织图案(pattern)。
图25示出了具有远端部分的刚性化装置,该远端部分具有多个被动联动装置。
图26示出了具有远端部分的刚性化装置,该远端部分具有多个主动控制的联动装置。
图27A-27E示出了多个主动控制的联动装置。
图28示出了一种刚性化装置的实施例,该刚性化装置包括在层状壁内延伸的线缆。
图29示出了一种刚性化装置的实施例,该刚性化装置包括在层状壁内延伸的线缆。
图30示出了一种刚性化装置的实施例,该刚性化装置包括在层状壁内延伸的线缆。
图31示出了一种刚性化装置的实施例,该刚性化装置包括在层状壁内延伸的线缆。
图32示出了一种刚性化装置的实施例,该刚性化装置包括在层状壁内延伸的线缆。
图33示出了一种刚性化装置的实施例,该刚性化装置包括在层状壁内延伸的线缆。
图34示出了一种刚性化装置的实施例,该刚性化装置包括在层状壁内延伸的线缆。
图35示出了一种刚性化装置,其包括沿着中心管腔向下延伸的线缆。
图36示出了一种刚性化装置的实施例,该刚性化装置包括螺旋状地缠绕在其周围的线缆。
图37示出了一种刚性化装置的实施例,该刚性化装置包括螺旋状地缠绕在其周围的线缆。
图38A-38B示出了一种刚性化装置的实施例,该刚性化装置包括螺旋状地缠绕在其周围的线缆。
图39A-39B示出了一种刚性化装置,其包括螺旋状地缠绕在其中的线缆
图40A-40D示出了远端部分的示例性联动装置。
图41A-41B示出了一种具有远端部分的刚性化装置,该远端部分包括位于刚性化部分之上的联动装置。
图42A示出了一种具有远端部分的刚性化装置,该远端部分包括位于刚性化部分内的联动装置。
图42B示出了带有转向线缆的刚性化装置,该转向线缆附接到靠近远端的壁上。
图43A-43C示出了一种具有可主动偏转的远端部分的刚性化装置。
图44A-44C示出了沿其长度具有独立的刚性化室的刚性化装置。
图45A-45D示出了具有气囊和充气管腔的刚性化装置。
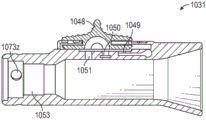
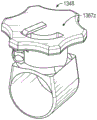
图46A-46B示出了一种用于诸如刚性化装置的装置的抽吸尖端的实施例。
图47A-47B示出了一种用于诸如刚性化装置的装置的抽吸尖端的实施例。
图48A-48B示出了一种用于诸如刚性化装置的装置的抽吸尖端的实施例。
图49A-49D示出了一种与刚性化装置一起使用的手柄的实施例。
图50A-50B示出了一种用于刚性化装置手柄的启动元件的实施例。
图51A-51C示出了一种用于刚性化装置手柄的启动元件的实施例。
图52A-52C示出了一种用于刚性化装置手柄的具有连接器的启动元件的实施例。
图53A-53D示出了一种与刚性化装置一起使用的手柄的实施例。
图54A-54B示出了一种与刚性化装置一起使用的手柄的实施例。
图55A-55C示出了一种用于刚性化装置手柄的启动元件的实施例。
图56A-56G示出了一种与真空刚性化装置一起使用的手柄的实施例。
图57A-57C示出了一种与压力刚性化装置一起使用的手柄的实施例。
图58A-58E示出了一种与压力刚性化装置一起使用的预填充手柄的实施例。
图59示出了在其侧面上安装有成像元件的刚性化装置。
图60示出了一种刚性化导引器。
图61A-61B示出了一种具有侧面通道机构的刚性化装置。
图62示出了一种嵌套刚性化系统。
图63示出了一种嵌套刚性化系统,其在刚性化装置的内部与外部之间具有盖件(cover)。
图64A-64B示出了一种嵌套刚性化系统,其中外部的刚性化装置包括转向和成像功能。
图65A-65H示出了嵌套刚性化系统的示例性使用。
图66示出了一种刚性化杆。
图67示出了一种与结肠镜一起使用的刚性化杆。
图68A-68B示出了一种其中带有镜的示例性刚性化装置。
图69A-69B示出了刚性化装置在胃肠道中的使用。
图70A-70B示出了一种用于ERCP的刚性化装置的使用方法。
图71A-71B示出了一种用于ERCP的刚性化装置的使用方法。
图72A-72D示出了一种用于ERCP的刚性化装置的使用方法。
图73A-73B示出了一种在心脏中使用刚性化装置以产生通向左心房的通道的方法。
图74A-74B示出了一种在心脏中使用刚性化装置来执行血管分支治疗的方法。
图75A-75C示出了一种在心脏中使用刚性化装置来进行二尖瓣修复的方法。
图76A-76B示出了一种在心脏中使用双重刚性化装置的方法。
图77示出了一种用作套管针的刚性化装置。
图78示出了一种在主动脉分叉处使用的刚性化装置。
图79示出了一种用于二尖瓣修复的刚性化装置。
图80示出了一种刚性化装置,其具有用于二尖瓣修复的远端有效载荷。
图81A-81F示出了一种使用刚性化装置来控制工作工具的方法。
具体实施方式(装置)
总的来说,本发明所描述的是刚性化装置(例如,外套管),其被配置为协助运输镜(例如,内窥镜)或其他医疗器械穿过身体的弯曲或环路部分(例如,血管)。刚性化装置可以是长的、薄的和中空的,并且可以从柔性构型(即松弛的、柔软的或松软的)快速转变为刚性构型(即是硬的和/或保持其在刚性化时的形状)。多个层(例如,盘绕的或加强层、滑动层、编织层、囊层和/或密封护套)可以共同形成刚性化装置的壁。刚性化装置可以通过例如向其壁或壁内施加真空或压力而从柔性构型转变为刚性构型。随着真空或压力的消除,这些层可以容易地相互剪切或移动。在施加真空或压力的情况下,这些层可以转变成一种状态,在这种状态下,它们表现出显著增强的抵抗剪切、移动、弯曲及扭曲(buckling)的能力,从而为系统提供刚性化。
本发明所述的刚性化装置可为各种医疗应用提供刚性化,包括导管、护套、镜(例如内窥镜)、丝(wire)或腹腔镜器械。刚性化装置可以作为单独的附加装置使用,或者也可集成到导管、护套、镜、丝或腹腔镜器械的主体中。本发明所描述的装置也可以为非医疗结构提供刚性化。
图1示出了示例性的刚性化装置系统。该系统包括刚性化装置300,该刚性化装置300具有壁,壁具有多个层,包括编织层、外层(其一部分被切除以显示其下的编织层)以及内层。该系统还包括具有真空或压力入口344的手柄342,以向刚性化装置300提供真空或压力。致动元件346可用于打开和关闭真空或压力,从而使刚性化装置300在柔性和刚性构型之间转换。刚性化装置300的远侧尖端(tip)339可以是光滑的、柔性的和无损伤的,以促进刚性化装置300穿过身体向远侧运动。进一步地,尖端339可以从远端向近端逐渐变细,以进一步促进刚性化装置300穿过身体向远侧运动。
图2A-2B示出了用于类似装置300的刚性化装置的示例性编织层209的一部分。编织层209可以包括编织股线(strand)233。编织层209可以是例如管状的编织物。
当刚性化装置(例如装置300)处于直(未弯曲的)构型时,股线233相对于刚性化装置的纵轴线235的编织角α可以小于45度,例如小于或等于40度、小于或等于35度、或者小于或等于25度。参考图3,刚性化装置的弯曲强度随着编织角α的增加而降低(当刚性化装置是直的或未弯曲的时)。也就是说,编织角为45度(扭矩或扭力编织物的典型最小角度。更大的角度通常用于导管轴加强)的刚性化装置在真空下的弯曲强度是编织角为25度的刚性化装置在真空下的弯曲强度的27%。因此,具有较小的编织角(例如,小于45度,如40度或更小或者35度或更小)有利地确保刚性化装置(例如,装置300)在真空下(以及类似地在压力下)在弯曲中保持刚性(抵抗构型的变化)。另外,当刚性化装置处于直的(未弯曲的)构型时,编织角α可以大于5度,例如大于8度、例如大于10度,例如15度或更大。具有在该范围内的编织角α确保了当处于柔性构型时(即,当未在真空或压力下刚性化时),编织物保持足够的柔性以便于弯曲。因此,当刚性化装置处于直构型时,股线233相对于刚性化装置的纵轴线235的编织角α可以是5至40度,例如10-35度、15-25度,例如大约5、10、15、20、25、30、35或40度。当刚性化装置处于直(未弯曲)构型时,股线233相对于刚性化装置的纵轴线235的5-40度的编织角α确保刚性化装置在柔性构型中(例如,当不处于真空/压力下时)足够柔软以弯曲,而在刚性构型中(例如,当处于真空或压力下时)足够坚硬。此外,应该理解的是,股线233被构造成彼此间相互滑动,因而编织角α将随刚性化装置挠曲和弯曲而改变。具有5度至40度之间的编织角α还有利地确保股线233能够相对于彼此自由移动,而不会导致纤维之间相互碰撞并且防止角度的进一步变化。
进一步地,编织层209的编织物可以在每英寸4-60根(pick)之间,例如8、10、12、14、16、18、20或25根/英寸。在一个实施例中,由层209形成的管具有0.578英寸的直径,并且每英寸具有12-14根编织物。
在一些实施例中,编织层209(或本发明所述的任何编织层)可被构造成使得本发明所述的刚性化装置具有高刚度比(即刚性构型中的刚度(例如当施加真空或压力时)与柔性构型中的刚度(例如当不施加真空或压力时)之间的比值)。例如,刚度比可以大于5,比如大于6、大于9、大于9或大于10。参考如下的表1,六个真空刚性化装置(样品A-F)被制造出来,并在4英寸的长度和1/2英寸的挠度上测试其分别在大气压中(柔性构型)和真空下(刚性构型)的悬臂弯曲刚度。如所示,减小编织角会提高刚性化装置的刚度。样品E和F特别地显示了典型扭矩角下的编织物(样品E,47.7度,刚性刚度为0.529lbf)与具有较小角度的编织物(样品F,27.2度,刚性刚度为1.455lbf)之间的刚度差异。同样如表1所示,具有较小角度(例如,低于45度或35度的角度,例如样品A-D和样品F)的刚性化装置可以比具有较大角度(例如,45度或以上的角度,例如样品F)的刚性化装置具有高得多的刚度比(例如,大于5、大于6、大于9或大于10的比值),该具有较大角度的刚性化装置可以具有低于5的刚度比。从表1中还可以看出,样品A和B的刚度比都大于5。样品B的编织角为14.9度,与样品A相比,样品B的刚度比比较低,但其绝对刚度较高,这是由于样品B的股线靠近纵轴线取向(因此样品B在柔性构型中具有更高的刚度)。
表1-真空刚性化装置

参考如下的表2,三个压力刚性化装置被制造出来(样品G-I),并在4英寸的长度和1/2英寸的挠度上测试它们分别在大气压(柔性构型)和4个大气压(刚性构型)下的悬臂弯曲刚度。所有样品均包括35-45%的覆盖率以及具有96股股线和每股股线一根细丝的编织物。如图所示,减小编织角会提高刚性化装置的刚度。如表2所示,角度较小的刚性化装置比角度较大的刚性化装置具有更高的刚度比。在一些实施例中,本发明所述的压力刚性化装置的刚度比大于10,例如大于15,例如大于20。
表2-压力刚性化装置

此外,在一些实施例中,编织层209的编织物可以具有30%-70%的覆盖率,例如40%-60%,如30%、40%、50%、60%或70%,其中覆盖率是指被编织物所覆盖或遮挡的下表面所占的百分比。
在一些实施例中,编织层209可以通过将每个单独的股线围绕内管或刚性化装置和/或独立的螺旋心轴进行盘绕,使得股线233彼此交织而形成。在一个实施例中,编织层209可以在0.50-0.60英寸,例如0.56英寸的心轴上热成型。此外,在一些实施例中,在制造过程中,编织层可以在管或心轴上安装至小于芯直径的直径(即小于初始制造出的编织物的直径)。以这种方式径向地压缩编织物可以在提供高刚性化倍数的范围内减小编织角(同时也降低PPI,增加管状编织层的总长度,并增加编织物覆盖率)。
股线233可以是矩形/平的(例如,长边为0.001-0.060英寸,如0.005英寸、0.007英寸、0.010英寸或0.012英寸,以及短边为0.0003-0.030英寸,如0.001英寸、0.002英寸或0.003英寸),圆的(例如,直径为0.001-0.020英寸,例如0.005英寸、0.01英寸、或0.012英寸),或者椭圆的。在一些实施例中,一些股线233可以是平的,一些股线233可以是圆的。
在一些实施例中,股线233可以由金属细丝(filament)(例如,不锈钢、铝、镍钛诺、钨或钛)、塑料(尼龙、聚对苯二甲酸乙二醇酯、PEEK、聚醚酰亚胺)或高强度纤维(例如,芳族聚酰胺、超高分子量UHMW聚乙烯、或液晶聚合物例如Vectran)制成。在一些实施例中,股线233可以由多层复合材料制成,例如具有薄弹性涂层的金属芯。在一个具体示例中,股线233可以包括直径为0.010英寸的圆尼龙(或直径为0.003英寸的金属细丝),其与横截面尺寸为0.002英寸×0.002英寸的扁平镀铝PET缠绕在一起。在一些实施例中,编织物的股线233的材料可以是具有已知高摩擦系数的材料。例如,股线233可以是整体结构或具有涂层,使得股线包括铝芯上的铝涂层、铜芯上的铜涂层、银芯上的银涂层或金芯上的金涂层。作为另一个示例,股线233可以涂覆有高弹性材料(例如,较低硬度的弹性体可以被涂覆在较高模量的基底的顶部)。作为另一个示例,股线233可以由苯乙烯共聚物、聚碳酸酯或丙烯酸制成。
在编织层209内可以延伸有12-800股股线233,例如24、48、96、120、144或更多股股线233。在一些实施例中,有96股股线或更多、120股股线或更多、200股股线或更多、或者240股股线或更多。由于股线之间相互作用的增加,更多的股线可以有利地帮助编织物实现刚性化。
参考图4A-4D,本发明所描述的任何刚性化装置的编织物可以具有各种不同的编织图案(pattern)。例如,参考图4A,层1709的编织物可以是菱形满载图案,其中两股相邻的股线1733a、b先在两股股线之上延伸,然后又在两股股线之下延伸。参照图4B,层1709的编织物可以是满载图案,其中每股股线1733a以与其相邻股线1733b相反的方式在两股之上和两股之下延伸。参照图4C,层1709的编织物可以是菱形半载图案,其中每股股线1733a在一股股线上方和一股股线下方延伸,与相邻股线1733b相反。参考图4D,层1709的编织物可以包括穿过交叉股线1733a、1733b的一个或多个纵向股线1733c。
参考图5A-5B,每股股线1833可以包括单根细丝1818(图5A)或多根细丝1818a-c(在图5B中,每股股线1833中示出了三根细丝1818a-c)。细丝1818可以被挑选(即其直径、间距和模量可以特别定制)以减少卷曲(细丝的波纹或弯曲)。减少卷曲能够帮助系统提供增强的压缩扭曲阻力,其可转化为增强的系统刚度。
示例性的具体编织层实施例J-N如表3所示。
表3-示例性的编织物


在使用中,可在本发明所述的刚性化装置的壁之间提供真空或压力,导致编织层和相邻层收缩和/或分离,以在柔性和刚性构型之间转换。因此,本发明所述的刚性化装置可以在被用户激活时有利地从非常柔性转变为非常坚硬。当施加真空或压力时,编织物或股线可以径向地收缩或膨胀,以相对于彼此机械固定或锁定在适当位置。因此,当施加真空或压力时,刚性化装置可以从柔性构型变成刚性构型(从而将刚性化装置固定在其要被施加真空或压力前所处的形状)。
参考图6A-6D,在一些实施例中,如本发明所述的刚性化装置5600的编织层5609的一端或两端可以结合到装置5600的另一层,以防止编织物的股线5633松脱。此外,股线5633的端部可以一种方式结合,这种方式使得当刚性化装置5600处于柔性构型时,在刚性化装置5600屈曲期间允许股线5633的相对运动(即,以防止装置5600刚性化或扭曲,这又会导致尖端5629处发生拖曳,这种情况可能会在股线5633受到约束时发生)。
例如,如图6A所示,编织层5609的尖端5629可以包括位于其上的低硬度材料涂层5634,例如硅树脂或聚氨酯,其是可拉伸的和/或柔性的。因此,股线5633的端部可以被涂层5634封装(从而防止松脱),同时当涂层5634拉伸和/或收缩(flex)时,股线仍然与涂层5634一起移动。涂层5634可以很薄,例如其厚度在0.005-0.250英寸之间(如大约1/32英寸厚)。
作为另一个示例,如图6B所示,编织层5609的尖端5629可以包括环绕于其上的环形圈5601z。在一些实施例中,圈5601z可以通过熔化股线5633的尖端来形成。在其他实施例中,圈5601z可以是结合到股线5633上的独立元件(例如与少于20%、少于10%或少于5%的股线5633结合)。在一些实施例中,可以存在两个彼此间隔大约180度的结合位置。圈5601z可以有利地确保股线5633不解开,并且还可以使股线在圈5601z下方相对于彼此进行很大的移动。圈5601z可以由例如橡胶、聚酰亚胺、聚四氟乙烯、硅树脂、聚氨酯、乳胶或ePTFE制成。
作为另一个示例,如图6C所示,编织层5609的尖端5629可以沿着尖端5629具有变化的经纬密度(pick count),在尖端处具有更大的经纬密度,朝着中心具有更小的经纬密度。因此,股线5633在尖端5629处相对于纵轴线的角度可以大于层5609的其余部分处的角度。例如,尽管装置5600中心部分处的股线5633可以相对于装置5600的纵轴线具有45度或更小的角度(例如,40度或更小、35度或更小、25度或更小、或20度或更小),但是在尖端5629处股线5633可以相对于纵轴线具有大于45度的角度,例如在45度和60度之间(例如,35度、45度或55度)。编织角的变化可以是在尖端5629处的连续变化和/或可以通过将两个单独的编织物连接在一起而产生。更大角度的股线5633可以在尖端5629处被胶合到最内层。通过在编织物的尖端5629处设置有较大角度,尖端5629可以在曲线或弯曲时保持柔性,即使当股线5633固定到内层5615时也是如此。在一些实施例中,尖端5629处增大的编织角可以通过在制造过程中改变拉动管状编织物内部的芯的速度来产生。
作为另一个示例,如图6D所示,编织层5609的尖端5629可以翻转并与最内层5615(和/或编织层5609径向向内的其他层)结合。这种尖端5629相对于非翻转型尖端5629可以更灵活,因为它包括额外的(翻转的)长度,在该长度内股线5633可以移动。
在一些实施例中,编织层5609的近端和远端可以具有不同的处理(例如,远端可以具有如图6A-6D所示的第一种处理,而近端可以具有如图6A-6D所示的第二种处理)。
在一些实施例中,本发明所述的刚性化装置(例如,刚性化装置300)可以包括一个或多个与编织层(例如,编织层209)毗邻的滑动层。滑动层可以被构造成减小编织物和毗邻层之间的摩擦,以允许毗邻层(和特别是编织层)更容易地相对于彼此剪切或移动,特别是当没有真空或压力施加到刚性化装置上时,以最大化柔性构型的柔性。滑动层可以有利地增强刚性化装置的基线柔性,以允许各层相对于彼此移动。在一个实施例中,滑动层可以包括粉末,例如滑石或玉米淀粉。特别地,粉末滑动层可以有利地减少摩擦,而不会显著增加装置的厚度,从而增强刚性化装置在柔性构型中的柔性。滑动层可以由低摩擦系数材料制成,例如薄膜含氟聚合物(FEP、化学薄膜、PTFE,厚度为2-50微米)。在一个实施例中,滑动层可以是涂层。在一个实施例中,滑动层可以是添加到弹性体中的滑动添加剂。在一个实施例中,滑动层可以是具有固有润滑特性的薄塑料膜的套,例如低密度聚乙烯(LDPE)。在一个实施例中,滑动层可以由薄的螺旋状包裹的膜制成,例如0.0005英寸FEP或0.00025英寸化学薄膜(St.Gobain)。在一个实施例中,滑动层可以由油脂、油或其他液体制成。
本发明所述的刚性化装置可以包括最内层,该最内层被构造为提供内表面,例如当在刚性化装置的壁内施加真空或压力时,附加层(如编织层)可抵靠该内表面被加固。该层可以进一步为壁提供密封(即可以是防漏的),并且可以足够坚固,即使在刚性化过程中,刚性化装置弯曲和/或压缩期间,都可以提供对于径向塌陷的抵抗力。参考图7,在一些实施例中,最内层8815可以包括基体(matrix)8851z内的加强元件8850z或线圈。加强元件8850z可以是连续的螺旋线圈或其间有间隙的闭合圈(其比螺旋线圈表现出更大的抗塌陷性)。另外,内层8801可以在其一侧或两侧包括有内膜8852z和外膜8853z。在一些实施例中,元件8853z、8852z、8850z/8851z中的每一个可以具有0.0002-0.015英寸的厚度。
加强元件8850z可以是例如金属丝,如由不锈钢、镍钛诺或钨制成的金属丝。加强元件8850z可以是例如高强度纤维(如凯夫拉尔纤维、动态纤维、维克特兰纤维、泰克罗纤维或碳纤维)。加强元件8850z可以是例如支架、从管子上切割下来的结构或编织物。在一些实施例中,加强元件8850z可以是圆丝(例如直径为0.0005-0.030英寸,如0.001英寸、0.003英寸、0.005英寸、0.007英寸或0.009英寸)。在一些实施例中,加强元件8850z可以是矩形丝(例如,具有0.001-0.100英寸的宽度,如0.010英寸、0.020英寸、0.030英寸、0.040英寸、0.050英寸、0.060英寸、0.070英寸、0.080英寸、0.090英寸或0.100英寸的宽度,和/或矩形丝可以具有0.0003-0.020英寸的厚度,如0.001英寸、0.003英寸、0.005英寸、0.007英寸或0.010英寸的厚度)。在其他实施例中,加强元件8850z可以具有椭圆形横截面和/或可以包括多个单独的股线和/或可以具有四个尖角圆化了的矩形横截面。在一些实施例中,加强元件8850z可以使用例如激光从单个管切割下来以产生间隙。在一些实施例中,不使用加强元件。
在一些实施例中,加强元件8850z可以是具有高的宽高比的元件(例如,相对于RE高度,其具有高的RE宽度,例如高宽比超过5∶1,例如超过10∶1,例如超过11∶1,例如大约12∶1)。需要注意的是,在图7中,RE宽度是加强元件8850z的宽度,RE高度是加强元件8850z的高度或厚度,RE间隙是加强元件8850z相互之间的距离。加强元件8850z的高的宽高比可以有利地协助防止由最内层8815内的加强元件8850z的平行四边形型塌陷引起的外部压力。当线圈的螺旋从近似垂直于线圈中心轴线朝平行于线圈中心轴线移动时(螺旋基本上“翻转”),就会发生平行四边形型塌陷。此外,如果加强元件8850z之间的RE间隙不超过RE高度的3倍,例如不超过RE高度的2倍,例如不超过RE高度的1.5倍,则在防止平行四边形方面可能是有利的。另外,具有最内层8815的中空管的内径与最内层8815中的加强层8850z的宽度之比小于5,例如小于4.5,例如大约4.3,同样有助于防止平行四边形型塌陷。
基体8851z可以是非常低的硬度,例如硬度等于或小于60A、50A、40A、30A、20A或10A的TPU或TPE。在一些实施例中,基体8851z可以是TPU、TPE、PET、PEEK、聚酯薄膜、聚氨酯或硅树脂。内外膜8852z、8853z可以类似地包括TPU、TPE、PET、PEEK、密拉(Mylar)、聚氨酯或硅树脂。在一些实施例中,内膜和外膜8852z、8853z可以通过喷涂、浸渍、包裹成片或管、拉过溶剂池、熔化和/或固结来施加。在一些实施例中,层8815不包括内膜和/或外膜8852z、8853z,和/或可以包括附加膜。内膜和/或外膜8852z、8853z可以产生光滑的内外表面。
在用于压力系统的最内层8815的具体示例中,该层被制成内径为0.260英寸的中空管,其RE宽度为0.050英寸,RE高度为0.008英寸,RE间隙为0.010英寸。两侧省略膜8853z。膜8852z(在基体8851z和加强元件8850z的两侧)均由聚氨酯(100%应变对应600psi压力)制成。基体8851z和每个膜8852z的厚度约为0.006英寸,总壁厚为0.018英寸。这种结构可以在超过10个大气压的外部压力时抵抗塌缩。
在用于压力系统的最内层8815的第二具体示例中,膜8853z在两侧被省略。RE宽度为0.050英寸,RE高度为0.008英寸,RE间隙为0.010英寸。膜8852z是较高硬度的弹性体,例如在100%应变下具有2000psi应力的弹性体,厚度约为0.001英寸。基体8851z可以是50A聚氨酯。基体8851z可以沉积为热塑性弹性体帘线原料(cord stock),例如0.008英寸的矩形横截面或0.010英寸的圆横截面。这种帘线原料也可以通过在其芯部使其与丝(例如0.001英寸的直径)或纤维共同挤压而沉积为具有增加的轴向模量(但不是横向模量)。
在用于压力系统的最内层8815的第三具体示例中,加强元件8850z可以是具有高宽高比的丝。例如,在方形不锈钢丝中,层8815可以具有0.005英寸的RE高度、0.060英寸的RE宽度和0.006英寸的RE间隙。形成有最内层8815的管的内径为0.26英寸。元件8852z和8851z可以是80A聚氨酯,厚约为0.002英寸。此外,层8851z可以是50A聚氨酯(例如,从其中包括熔化的聚氨酯及通过压力来实现精确分配的孔的加热罐中沉积得到)。该示例性最内层8815的结构可以在超过10个大气压的外部压力,例如超过12个大气压的压力,例如超过13个大气压的压力下抵抗塌陷。
在用于真空系统的最内层8815的具体示例中,省略了一侧(例如,外侧或顶侧)上的外膜8853z,加强/基体上方(外侧)的膜8852z包括0.005英寸的50A聚氨酯,基体8851z由0.005英寸厚的50A聚氨酯制成,加强元件8850z是不锈钢丝,加强/基体下面(内侧)的膜8852z包括0.0025英寸厚的50A聚氨酯,底部外膜8853z是0.004英寸厚的80A聚氨酯。RE宽度为0.020英寸,RE高度为0.005英寸,RE间隙为0.010英寸。底部外膜8853z是亲水涂层。由层8815形成的管的内径为0.551英寸。
虽然在图7中显示为对称的,但是应该理解的是,最内层8815不需要具有对称设置的膜8852z、8853z。例如,两层都不在底部(在基体/加强内侧),而两层都在顶部。此外,应当理解,两个最内膜8852z的材料不需要相同,两个最外膜8853z的材料也不需要相同。
最内层的加强元件可以为多种构型。如图8D-8F所示,加强元件9205z可以是多起点线圈绕组(例如,如图8F所示的2个起点,如图8E所示的3个起点,或者如图8D所示的4个起点)。当使用多起点线圈绕组时,加强元件之间沿纵轴线的间隙可以与单个线圈相同,但是起点数可以是2、3、4、5、6、7、8、9或更多。单个起点会产生接近垂直的丝角度(例如,偏离垂直2度),而多起点方法会产生的丝角度使线圈偏压成向一个方向倾斜,远离垂直(例如,4、6、10、15或甚至20度)。该较大的角度可用于使最内层在压力下不太容易发生倾斜或结构性塌陷,因为具有较大倾斜度的线圈倾向于相互支撑从而获得稳定性。图8A-8C示出了多起点加强元件9205Z的各个起点(线圈)。图8C显示了图8F中的一个线圈,图8B显示了图8E中的一个线圈,图8A显示了图8D中的一个线圈。
在一些实施例中,参照图9A-9B,加强元件8950z可以是一系列波浪形或波状线(或如本发明所述的卷绕的波状线)。如图9B所示,当装置被加载时,波状加强元件8950z向着与自身碰撞移动,压缩丝之间的基体8851Z并抵抗平行四边形型塌陷。在一个具体实施例中,具有这种波状线的最内层可以具有0.005英寸的RE高度、0.060英寸的RE宽度和仅0.006英寸的RE间隙。波状波可以从中心线开始有+/-0.03英寸的变动(也就是说,波振幅为0.060英寸)。波可以每0.3英寸重复一次(即波长为0.3英寸)。
在一些实施例中,参照图10A-10C,加强元件9050z可以包括交替的口袋丝(pocketwire)9052z和缺口丝(notched wire)9053z。当卸载时,每个相应元件的口袋和缺口可以分开(如图10D所示)。然而,当加载时,丝9053z的缺口向与丝9052z的口袋碰撞移动(如图10E所示),以压缩丝之间的基体8851z并抵抗平行四边形型塌陷。
在一些实施例中,参考图11A-11B,加强元件9150z可以是挠曲(flexure)设计,例如,从激光管切割下来。
在某些情况下,加强元件可以与内层分开。例如,加强元件可以在径向上定位在内层的内侧或外侧。最内层可以有例如30A至80A的硬度。此外,最内层的壁厚可以在0.0005和0.060英寸之间。在一些实施例中,最内层可以在其内表面上包括润滑剂或涂层(例如,亲水涂层),以改善内窥镜或其他器械穿过其中的滑动。涂层可以是亲水性的(例如 涂层或
涂层或 涂层)或疏水性的(例如含氟聚合物)。可以通过例如在其上浸渍、涂装或喷涂方法来施加涂层。最内层可以是具有低摩擦系数的层压层。
涂层)或疏水性的(例如含氟聚合物)。可以通过例如在其上浸渍、涂装或喷涂方法来施加涂层。最内层可以是具有低摩擦系数的层压层。
图12A和12B示出了刚性化构型时的示例性刚性化装置。当刚性化装置被刚性化时,它以施加真空或压力之前所处的形状进行刚性化,即,它不会变直、弯曲或以其他方式显著改变其形状(例如,它可以以如图12A所示的环形构造或如图12B所示的蛇形形状变硬)。这可能是因为在内层或外层(例如,由绕线管制成的)上的空气硬化作用可能只是刚性化装置在弯曲时的最大负载能力的小的百分比(例如5%),从而允许刚性化装置抵抗矫直。一旦释放真空或压力,编织物或股线可以相对于彼此解锁并再次移动,从而允许刚性化装置弯曲。此外,在刚性化装置通过释放真空或压力而变得更加柔性时,它会保持真空或压力释放之前的形状来变柔性,即它不会变直、弯曲或以其他方式显著改变其形状。因此,本发明所述的刚性化装置可以通过限制编织物的股线之间的运动(例如,通过施加真空或压力)从柔性的、刚度较小的构型转变为刚度较高的刚性构型。
本发明所描述的刚性化装置可以在刚性和柔性构型之间快速切换,并且在一些实施例中具有无限数量的转换周期。随着介入医疗设备被制造得更长并且被更深地插入人体,并且随着它们被期望进行更严格的治疗手术,对精确度和控制的需求增加。如本发明所述的选择性刚性化装置(例如,外套管)可以有利地既提供柔性的益处(当需要时),又提供刚度的益处(当需要时)。此外,本发明所述的刚性化装置可用于例如经典的内窥镜、结肠镜、机器人系统和/或导引系统,例如在2016年9月2日提交的题为“DEVICE FOR ENDOSCOPICANDANCEMNT THROUGH THE SMALL INTESTINE”的国际专利申请PCT/US2016/050290中所描述的,其全部内容通过引用结合于此。
本发明所述的刚性化装置可以以多种构型提供,包括不同的长度和直径。在一些实施例中,刚性化装置可以包括工作通道(例如,用于典型的内窥镜工具在刚性化装置的主体内通过)、气囊、嵌套元件和/或侧向加载特征。
参考图13A-13D,在一个实施例中,管状刚性化装置100可以包括具有位于腔(lumen)120周围的多个层的壁(例如,用于器械或内窥镜穿过其中放置)。可以在层之间提供真空来将刚性化装置100刚性化。
最内层115可被配置为提供内表面,例如,当在刚性化装置100的壁内施加真空时,其余层可抵靠内表面被加固。该结构可以被配置成在非真空条件下最小化弯曲力/最大化柔性。在一些实施例中,如上所述,最内层115可以包括基体内的加强元件150z或线圈。
最内层115之上(即径向向外)的层113可以是滑动层。
层111可以是径向间隙(即,空间)。间隙层111可以为其上的编织层提供在其中移动的空间(当没有施加真空时),以及为编织层提供在其中径向向内移动的空间(在施加真空时)。
层109可以是包括编织股线133的第一编织层,类似于本发明别处所述。编织层可以是例如0.001-0.040英寸厚。例如,编织层可以是0.001英寸、0.003英寸、0.005英寸、0.010英寸、0.015英寸、0.020英寸、0.025英寸或0.030英寸厚。
在一些实施例中,如图13B所示,编织物可以具有拉伸或环向纤维(hoop fiber)137。环向纤维137可以螺旋和/或编织到编织层中。此外,环向纤维137可以定位为每英寸2-50个环,例如每英寸20-40个环。环向纤维137可以有利地在径向方向上传递高压缩刚度(以抵抗扭曲或向外弯曲),但是可以在刚性化装置100的纵轴线方向上保持柔顺性。也就是说,如果对刚性化装置100施加压缩,编织层109将在压缩时试图扩大直径。环向纤维137可以抵抗这种径向膨胀,从而抵抗压缩。因此,环向纤维137可以提供一种系统,该系统在弯曲时是柔性的,但仍然抵抗拉伸和压缩。
层107可以是类似于层111的另一径向间隙层。
在一些实施例中,本发明所述的刚性化装置可以具有一个以上的编织层。例如,刚性化装置可以包括两个、三个或四个编织层。参考图13C,层105可以是第二编织层105。第二编织层105可以具有关于第一编织层109描述的任何特征。在一些实施例中,第二编织层105的编织物可以与第一编织层109的编织物相同。在其他实施例中,第二编织层105的编织物可以不同于第一编织层109的编织物。例如,第二编织层105的编织物可以包括比第一编织层109的编织物更少的股线并具有更大的编织角α。具有更少的股线可以有助于增加刚性化装置100的柔性(相对于第二编织物具有相同或更多股线的情况),并且更大的编织角α可以有助于收缩第一编织层109的直径(例如,如果第一编织层被压缩),同时增加/保持刚性化装置100的柔性。作为另一个示例,与第一编织层109的编织物相比,第二编织层105的编织物可以包括更多的股线,并且具有更大的编织角α。具有更多的股线可以产生相对坚固和光滑的层,而具有更大的编织角α可以有助于收缩第一编织层109的直径。
层103可以是类似于层111的另一径向间隙层。间隙层103可以具有0.0002-0.04英寸的厚度,例如大约0.03英寸。该范围内的厚度可以确保编织层的股线133可以容易地相对于彼此滑动和/或凸出,以确保刚性化装置100弯曲期间的柔性。
最外层101被构造成当施加真空以将其向编织层105、109层方向拉动时,最外层101会径向向内移动并贴合到编织层表面上。最外层101可以是柔软的和无损伤的,并且可以在其两端密封,以与层115形成真空密封室。最外层101可以是弹性的,例如由聚氨酯制成。最外层101的硬度可以是例如30A-80A。此外,最外层101可以具有0.0001-0.01英寸的厚度,例如大约0.001英寸、0.002英寸、0.003英寸或0.004英寸。或者,最外层可以是塑料,包括例如LDPE、尼龙或PEEK。
在一些实施例中,最外层101可以具有例如延伸穿过其中的拉伸或环向纤维137。环向纤维137可以由例如芳族聚酰胺(例如Technora、尼龙、Kelvar)、聚芳酯纤维、聚乙烯纤维、碳纤维、玻璃纤维或塑料制成。此外,环向纤维137可以设置为每英寸2-50个环,例如每英寸20-40个环。在一些实施例中,环向纤维137可以层压在弹性护套内。与另一个方向相比,环向纤维可以有利地在一个方向上提供更高的刚度(例如,在环向方向上可以非常硬,但是在刚性化装置的纵轴线方向上非常柔顺)。另外,环向纤维可以有利地提供低环向刚度,直到纤维被置于拉伸载荷下,此时环向纤维可以突然表现出高环向刚度。
在一些实施例中,最外层101可以在其外表面上包括润滑剂、涂层和/或粉末(例如滑石粉),以改善刚性化装置在解剖结构中的滑动。涂层可以是亲水性的(例如 涂层或
涂层或 涂层)或疏水性的(例如含氟聚合物)。例如,可以通过在其上浸渍、涂装或喷涂涂层来施加涂层。
涂层)或疏水性的(例如含氟聚合物)。例如,可以通过在其上浸渍、涂装或喷涂涂层来施加涂层。
最内层115可类似地在其内表面上包括润滑剂、涂层(例如亲水或疏水涂层)和/或粉末(例如滑石粉),其被构造为允许各毗邻层之间更容易地相互剪切,特别是当没有真空施加到刚性化装置100时,以实现柔性最大化。
在一些实施例中,最外层101可以在径向向内的层上松弛。例如,层101的内径(假设它构成管)与径向向内的下一层(例如,与编织层)之间可以具有0-0.200英寸的直径方向上的间隙。这可以使真空刚性化系统在不处于真空下时更具柔性,同时仍然保持高刚性化倍数。在其他实施例中,最外层101可以在径向上向内的下一层(例如,编织层)上拉伸一些。例如,构成层101的管的零应变直径可以比径向向内的下一层的直径小0-0.200英寸并在其上拉伸。当不在真空下时,该系统可以比外层101更松散的系统具有更小的柔性。然而,它也可以具有更光滑的外观,并且在使用过程中不太可能撕裂。
在一些实施例中,最外层101可以在径向向内的层上松弛。可以在层101下面施加小的正压力,以便轻轻地扩张层101,并允许刚性化装置在柔性构型中更自由地弯曲。在该实施例中,最外层101可以是弹性的,并且可以在编织物上保持压缩力,从而使其具有刚度。一旦提供正压(足以名义上将护套从编织物上展开,例如2磅),最外层101不再贡献刚度,这可以增强基线柔性。一旦需要刚性化,可以用负压(真空)代替正压来提供刚度。
可以在最小真空到完全大气真空(例如,大约14.7磅/平方英寸)的范围内在刚性化装置100内输送真空。在一些实施例中,可以有泄放阀、调节器或泵控制器,使得真空被泄放至任何中间水平,以提供可变刚度能力。真空压力可以有利地通过将编织套管层压靠在相邻层上来使刚性化装置结构刚性化。编织物在弯曲时是自然柔性的(即当垂直于其纵轴线弯曲时),并且当套管弯曲时,由交织的股线形成的网格结构会变形,以使得编织物在置于内层上时顺应弯曲的形状。这导致网格的几何形状中每个网格元素的转角随着编织套管弯曲而变化。当被压缩在保形材料(conformal materials)之间时(例如在此描述的层),网格元素被锁定在它们当前的角度,并且在施加真空时具有增强的抵抗变形的能力,从而在被施加真空时,能够在弯曲中刚性化整个结构。此外,在一些实施例中,穿过编织物或在编织物上的环向纤维可以承载拉伸载荷,这有助于防止编织物在被施加高弯曲载荷时的局部扭曲。
当从柔性构型转变为刚性构型时,刚性化装置100的刚度可以从2倍(fold)增加到30倍以上,例如10倍、15倍或20倍。在一个具体示例中,测试了一个类似于刚性化装置100的刚性化装置的刚度。被测试的刚性化装置的壁厚为1.0毫米,外径为17毫米,在刚性化装置的9.5厘米长的悬臂部分的端部施加力,直到刚性化装置偏转10度。在柔性模式下这样做所需的力只有30克,而在刚性(真空)模式下这样做所需的力是350克。
在真空刚性化装置100的一些实施例中,可以只有一个编织层。在真空刚性化装置100的其他实施例中,可以有两个、三个或更多编织层。在一些实施例中,刚性化装置100的一个或多个径向间隙层或滑动层可以被移除。在一些实施例中,刚性化装置100的一些或全部滑动层可以被移除。
本发明所述的编织层可作为可变刚度层。可变刚度层可以包括一个或多个可变刚度元件或结构,当其被激活时(例如,当施加真空时),弯曲刚度和/或剪切阻力增加,从而导致更高的刚性。除了编织层之外或者用来代替编织层,可以使用其他可变刚度元件。在一些实施例中,接合件可以用作可变刚度元件,如2018年7月19日提交的标题为“DYNAMICALLYRIGIDIZING OVERTUBE”的国际专利申请PCT/US2018/042946中所描述的,该申请的全部内容通过引用结合于此。可选地或附加地,可变刚度元件可以包括粒子或颗粒、堵塞层、片状物、刚性化轴向构件、刚性化器、纵向构件或基本纵向构件。
在一些实施例中,本发明所述的刚性化装置可以通过施加压力而不是施加真空来钢性化。例如,参考图14A-14B,刚性化装置2100可以类似于刚性化装置100,除了它可以被构造为在其中保持用于刚性化的压力(例如,大于1个大气压)而不是真空。因此,刚性化装置2100可包括位于腔2120周围的多个层(例如,用于穿过其放置器械或内窥镜)。刚性化装置2100可以包括最内层2115(类似于最内层115)、滑动层2113(类似于滑动层113)、压力间隙2112、囊(bladder)层2121、间隙层2111(类似于间隙层111)、编织层2109(类似于编织层109)或本发明所述的其他可变刚度层、间隙层2107(类似于层107)以及最外容纳层2101。
压力间隙2112可以是密封的室,其为向刚性化装置2100的层施加压力提供间隙。可以使用流体或气体膨胀/压力介质向压力间隙2112提供压力。膨胀/压力介质可以是水或盐水,或者例如润滑流体,如油或甘油。润滑流体可以例如帮助刚性化装置2100的各层在柔性构型中相互滑动。在刚性化装置2100的刚性化期间,膨胀/压力介质可以被供应到间隙2112,并且可以从间隙2112部分地或完全地排出,以将刚性化装置2100转换回柔性构型。在一些实施例中,刚性化装置2100的压力间隙2112可以连接到预填充压力源,例如预填充注射器或预填充吹入器,从而减少医生所需的设置时间。
囊层2121可由例如低硬度弹性体(如肖式20A至70A)或薄塑料片制成。囊层2121可以由塑料或橡胶薄片形成,该薄片已经被纵向密封以形成管。例如,纵向密封可以使用对接或搭接接头。例如,通过在搭接接头处熔化橡胶或通过使用粘合剂,可以在橡胶片中以纵向方式形成搭接接头。在一些实施例中,囊层2121的厚度可以是0.0002-0.020英寸,例如大约0.005英寸厚。囊层2121可以是柔软的、高摩擦的、有弹性的和/或能够易起皱的。在一些实施例中,囊层2121是聚烯烃或聚酯。囊2121可以例如通过使用用于形成热收缩管的方法来形成,例如挤压出基底材料,然后利用热、压力和/或辐射使壁变薄。当通过压力间隙2112提供压力时,囊层2121可以通过间隙层2111膨胀,以将编织层2109推向最外容纳层2101,使得编织股线的相对运动减小。
最外容纳层2101可以是管,例如挤出管。可选地,最外容纳层2101可以是管,其中加强构件(例如,金属丝,包括圆或矩形横截面的金属丝)被封装在弹性基体中,类似于本发明的其它实施例所描述的最内层。在一些实施例中,最外容纳层2101可以包括螺旋弹簧(例如,由圆形或扁平丝制成的),和/或管状编织物(例如由圆或扁平金属丝制成的编织物)以及不结合到该层中的其他元件的薄弹性片。最外容纳层2101可以是具有连续且光滑表面的管状结构。这有助于外部构件紧靠其并在局部高接触载荷下滑动(例如,如本发明进一步描述的嵌套构型)。此外,外层2101可以被构造为支撑压缩载荷,例如挤压。此外,外层2101(例如,其中具有加强元件)可以被构造成即使在被施加压力时也可防止刚性化装置2100改变直径。
因为外层2101和内层2115都包括加强元件,所以编织层2109可以在直径收缩(在拉伸载荷下)和直径增大(在压缩载荷下)中都被合理地约束。
通过使用压力而不是真空来将柔性状态转换为刚性状态,可以增加刚性化装置2100的刚性。例如,在一些实施例中,供应到压力间隙2112的压力可以在1至40个大气压之间,例如在2至40个大气压之间,例如在4至20个大气压之间,例如在5至10个大气压之间。在一些实施例中,供应的压力大约为2个大气压、大约4个大气压、大约5个大气压、大约10个大气压、大约20个大气压。在一些实施例中,刚性化装置2100可从柔性构型到刚性构型表现出相对弯曲刚度(以简单的悬臂构型测量)2-100倍的变化,例如10-80倍,例如20-50倍。例如,刚性化装置2100可以从柔性构型到刚性构型具有大约10、15、20或25、30、40、50或超过100倍的相对弯曲刚度变化。图15示出了本发明所述刚性化装置的弯曲强度与压力之间的关系图。如图所示,刚性化装置的弯曲强度随着提供给壁的压力增加而增加。
类似于刚性化装置2100的各种加压刚性化装置的壁的简化版本在图16A-16O中示出。例如,图16A的刚性化装置2200a包括最内层2215a、压力间隙2212a、密封到最外层2201a的囊层2221a、编织层2209a和外部容纳层2201a(类似于在刚性化装置2100中所描述的)。刚性化装置2200a还包括在其近端和远端的端盖2292a,以密封其中的压力。当压力经由入口2293a被供应到压力间隙2212a时,囊层2221a被压靠在编织层2209a上,编织层2209a又被压靠在最外层2201a上,以防止编织物的股线相对于彼此移动。
参考图16J,刚性化装置2200j类似于刚性化装置2200a,只是增加了滑动层2213j和加强(stiffening)层2298j。层2213j可以是如本发明所述的滑动层,例如包括涂层膜或粉末。层2298j可以是加强层,类似于层2201j和2215j,可以包括如本发明别处所述的加强元件2250z。附加的加强层2298j可以与内层2215j协同工作。例如,在柔性构型中,两层2215j和2298j可以轻易地彼此滑过(经由滑动层2213j),并且在刚性构型中(即当施加压力时)彼此粘附以形成硬复合结构。层2298j可以是高硬度的弹性橡胶,例如硬度大于或等于60A、70A、80A或90A的TPU(热塑性聚氨酯)或TPE(热塑性弹性体)。当管处于柔性状态时,层2215j和2298j可以轻易地相对于彼此剪切或移动(例如由于滑动层2213j),使得系统的柔性低于层结合在一起时的柔性。当管处于刚性状态时(例如当施加压力时),层2215j、2298j和2213j可以彼此锁定,并且像单个结合层一样起作用,以抵抗刚性化装置2200j的壁塌陷。类似于其他实施例,当向间隙2212j提供压力以刚性化装置2200j时,编织层2205j可以推靠外层2201j。
参考图16B,刚性化装置2200b类似于刚性化装置2200a,除了压力间隙2212b被翻转的囊层2221b(或双层囊)包围,即,使得囊层2221b包括与编织层2205b邻接的一侧和与最内层2215b邻接的一侧。当压力被供应到压力间隙2212b(囊层2221b的两侧之内)时,囊层2221b可以向最内层2215b和编织层2209b(编织物2209b又可以被推向最外层2201b)膨胀。
参考图16C,刚性化装置2200c类似于刚性化装置2200a,除了囊层2221c被密封到最内层2215c而不是最外层2201c。当压力经由入口2293c被供应到压力间隙2212c时,囊层2221c被压向编织层2209c,编织层2209c又被压向最外层2201c。
参考图16D,刚性化装置2200d类似于刚性化装置2200b,除了最内层2215d是弹簧元件而不是绕线管。因为压力在翻转的囊层2221d中,所以内层2215d本身不需要密封。
参考图16E,刚性化装置2200e类似于刚性化装置2200a,除了最内层2215a被内部有效载荷2294e代替,该有效载荷在近端和远端处都被密封并且可以在其中包括多个腔(例如,工作通道2291e、压力通道2292e和冲洗通道2293e)。
参考图16F,刚性化装置2200f类似于刚性化装置2200a,除了编织层2209f在压力间隙2212f和囊层2221f内侧,使得提供给压力间隙2212f的压力让囊层2221f向内推压编织层2209f,编织层2209f又推压最内层2215f。
在一些实施例中,压力刚性化装置可以包括两个编织层(例如,具有相同或不同的编织物特征)。例如,图16M中示出了具有两个编织层2209m和2205m的示例性刚性化装置2200m。两个编织层2209m和2205m将两个囊2221m和2217m(和/或单个环形囊)夹在其间。当压力被施加到两个囊之间的压力间隙2212m时,外部编织层2205m将被径向向外推向外层2201m,同时内部编织层2209m将被径向向内推向内部编织层2215m,以使装置2200m刚性化。
图16N示出了具有两个编织层2209n、2205n的另一示例性刚性化装置2200n。两个编织层2209n、2205n彼此相邻地位于囊层2221n(图中未标出)和外管2201n之间。当压力被供应到压力间隙2212n时,囊2221n迫使两个编织层2209n、2205n聚在一起并抵靠外管2201n。当加压时,编织层2209n、2205n可以相互交错,从而增强装置2200n的刚性。
参考图16K,刚性化装置2200k类似于刚性化装置2200a,除了环形圈2219k(例如包括纤维和粘合剂)位于编织层2209k和囊层2221k的每个端部周围,以将囊层2221k附接到最内层2215k(从而当通过入口2293k供应压力时,将压力保持在压力间隙2212k内)。例如,环形圈2219k可以包括高强度纤维,例如Kevlar或Dyneema。此外,粘合剂可以是例如氰基丙烯酸酯。在一些实施例中,粘合剂也可以放置在最内层2215k和囊层2221k之间的端部,并且还包围入口管。
图16G显示了具有间隙入口2293g和通气入口2223g的刚性化装置2200g。入口2293g连接到压力间隙2212g(通过压力管线2294g连接)。入口2223g连接到编织层2209g周围的间隙2206g(在囊2221g和最外层2201g之间)。装置2200g可以以一种或多种不同的构型刚性化。在第一刚性构型中,压力可以施加到入口2293g,而通气入口2223g可以打开或排气到大气压力。因此,通过入口2293g供应到压力间隙2212g的压力可以将编织物2209g推向最外层2201g,这又可以迫使间隙2206g中的任何空气通过通气入口2223g排出。允许空气通过通气入口2223g逸出可以实现编织层2209g和外层2201g之间更紧密的机械配合,从而强化装置2200g的刚性化。在第二刚性构型中,压力可以施加到入口2293g,真空可以施加到通气入口2223g。这可导致刚性化装置2200g变得比第一构型中更硬,因为真空有助于将编织层2209g向外层2201g移动。装置2200g同样可以有一种或多种不同的柔性构型。在第一柔性构型中,入口2293g和通气入口2223g都可以向大气压力开放。这将使编织层2209g相对于外层2201g变松弛,并且随着编织层2209g相对于外层2201g自由移动,使得刚性化装置2200g呈柔性状态。在第二柔性构型中,可以向入口2293g和通气入口2223g提供低压(例如,高于大气压5-10%)。这可导致最外层2201g和最内层2215g稍微分离,这可以为编织层2209g自由移动提供额外的区域。因此,这可导致刚性化装置2200g变得比在第一刚性化构型中更具柔性。此外,在柔性构型中提供高于大气压的低压可以允许刚性化装置2200g以非常小的直径被引入到主体中(例如,使得压力间隙2212g基本为零),然后低压可以被提供给入口2293g和通气入口2223g,以稍微扩大压力间隙2212g,从而为编织层2209g自由移动提供更多的空间。
图16H显示了刚性化装置2200h,其波纹管2243h连接到压力管线2294h。压力间隙2212h、压力管线2294h和波纹管2243h都可以被构造成填充有密封的压力传递介质,例如蒸馏水或盐溶液或油。压力传递介质可以是不透射线的流体,这有利地将在使用荧光透视法的手术中更清楚地显示刚性化装置。压力传递介质可以在要使用前才添加到刚性化装置和/或在装置制造时就添加到刚性化装置中。在使用中,激活致动器2288h可以压缩波纹管2243h,从而减少波纹管2243h中的压力介质的体积,该压力介质通过压力管线2294h流到压力间隙2212h,导致压力间隙2212h中的压力升高并引发编织层2209h朝向外层2201h的运动。通气入口2223h可以向大气开放,以允许气体从编织层2209h周围的空间2206h逸出。此外,反转致动器2288h的动作会导致压力间隙2212h中的压力下降,因为压力介质移回到波纹管2243h。致动器2288h可以是例如螺线管、音圈、导螺杆、阀或旋转凸轮。在一些实施例中,压力管线2294h可以被夹紧或压平,以提高压力间隙2212h中的压力,而不是使用波纹管2243h。
图16I示出了分别包括两个集水装置2230i和2228i的刚性化装置2200i。集水装置2230i和2228i可以包括流体介质,例如水和气体介质,如空气。压力或真空或其组合可以施加到入口2293i、2223i。使用所示的集水装置构造可能意味着不管每个间隙2206i或2212i的加压状态如何(增加的压力、真空或大气压力),在刚性化装置中都没有空气或气体。如果该间隙在手术过程中发生泄漏,这意味着只有流体介质进入患者体内,从而可以保护患者免受气体(如空气)栓塞。
在一些实施例中,本发明所述的刚性化装置可包括多个沿装置的长度纵向延伸的单独的囊。例如,参照图16O,装置2200o包括围绕压力间隙2212o分布的四个不同的周向囊2221o。在该实施例中,编织层同样被分成四个纵向扁平编织物2209o,每个编织物位于囊2221o径向向外的位置。在其他实施例中,编织层可以包括缠绕在囊2221o周围的管状编织物(类似于以下参照图67所述)。此外,外层2201o和内层2215o通过分隔物2236o连接。在一些实施例中,分隔物2236o可以由外层或内层2201o、2215o的元件形成(例如,可以是2201o、2215o中的一层或两层的连续元件)。在一些实施例中,分隔物2230o可以被构造成帮助保持壁的厚度。当压力被提供给压力间隙2212o时,囊2221o膨胀以将扁平编织物2209o推向外层2201o。
在一些实施例中,参照图16L,本发明描述的压力刚性化装置不包括最内层(例如,不包括其中具有加强元件的最内层)。相反,刚性化装置2200l可以包括外层2201l、间隙层2206l、编织层2209l和翻转或管状囊2221l(其中具有压力间隙2212l)。管状囊2221l可以被构造成围绕内部装置(例如镜2291)定位。当压力间隙2212l被填充有加压介质时,囊2221l可以朝向镜2291和编织层2209l膨胀。应该理解的是,这里描述的关于真空刚性化装置的任何特征可以用就压力刚性化装置描述的任何特征来替代或替换。
在一些实施例中,本发明所述的刚性化装置可以在其中结合工具或工作通道。工作通道可以设计成不会显著增加刚性化装置的弯曲刚度。参照图17A-17C,在一个实施例中,刚性化装置500可以包括延伸穿过其中的工作通道555。工作通道555可以包括由交替伸缩管状部分形成的中心腔571z(例如,用于工作元件从中通过),所述伸缩管状部分从较大直径端569z到较小直径端570z局部颈缩或渐缩。每个部分可以在离散位置或锚定点568z处连接到壁的下层(例如,最内层515上的滑动层513),并且除此之外可以自由移动。当刚性化装置500弯曲时,较小直径端570z可以在相邻部分的较大直径端559z内移动,以允许工作通道555弯曲。工作通道555可以位于刚性化装置500的壁内,例如位于滑动层513和第一编织层509之间的径向间隙511中(因此也可以位于径向间隙层507、第二编织层505、径向间隙层503和最外层501的下方)。工作通道555因此可以定位在刚性化装置500的密封真空(或压力室)内。在一些实施例中,工作通道555本身可以位于密封袋或层572内,以确保没有真空或压力泄漏路径。在其他实施例中,这些部分可以包括位于其间的滑动密封,以确保没有真空或压力泄漏路径。在一些实施例中,如图17D所示,可以有替代的大直径部分525a和小直径部分525b,而不是具有渐缩部分。在刚性化装置500上弯曲期间,较小直径部分525b可以在较大直径部分525a内移动。工作通道可以放置在由层501和515形成的密封体积内,或者可以放置在该密封体积外面,例如在层501的顶部上。
参考图18A-18B,在一些实施例中,刚性化装置7800可以包括围绕刚性化装置7800的细长主体7803z的一部分螺旋的工作通道7855。例如,工作通道7855可以相对于装置7800的纵轴线以40-50度的角度螺旋,如大约45度的角度。当刚性化装置7800弯曲时,螺旋工作通道7855可以有利地变形为曲线路径,而不抵抗弯曲和/或不迫使路径长度沿着其长度进行调整。工作通道7855可以包括集成到手柄7831上的近端端口7840z和成型到刚性化装置7800的尖端7833z的端部上的远端端口7841z(工作工具可以通过其退出)。螺旋工作通道7855可以位于最外层7801之上、外层7801下(如图18A-18B所示,为了清楚起见,外层7801已经被移除),或者进一步位于壁的层内(例如,编织层下)。
参考图19A-19B,在一些实施例中,刚性化装置4500可以包括围绕其外侧螺旋的多个工作通道4555。如图19A-19B所示,工作通道4555可以例如形成围绕刚性化装置4500的螺旋护罩。在一些实施例中,工作通道4555可以共同构造形成第二刚性化元件,该第二刚性化元件可以与内部刚性化装置4500分开进行刚性化。由于各个螺旋工作通道4555的相对运动,第二刚性化元件可以有利地是高度柔性的。在一些实施例中,工作通道4555可以包括薄的柔性圈和/或薄的柔性护套,以在圆形横截面中包含工作通道4555。在一些实施例中,装置4500可以进一步包括可转向的远侧尖端4547,例如,以帮助放置延伸穿过工作通道4555的工具。
参考图20A-20B,在一些实施例中,刚性化装置8000可以包括刚性化细长主体8003z,该细长主体8003z具有多个工作通道8055a-d(例如1-10、3-5或4-5个工作通道),这些工作通道沿着其中心腔8020延伸至尖端8033z。在整个手术中,工作通道8055a-d可用于多种不同的工具。例如,工作通道8055a-d中的一个可用于带有摄像机和照明的导管,另一个可用于牵引,另一个可用于切割,另一个可用于抽吸等。沿着工作通道8055a-d延伸的元件可以在整个手术过程中互换。在一些实施例中,刚性化细长主体8003z可以是一次性的,而工具可以是可清洁的和/或可消毒的。在一些实施例中,刚性化装置8000可以进一步包括被动或主动联动装置(linkage)8004z。
参考图21,在一些实施例中,刚性化装置8100可以包括第一工作通道8155a和第二工作通道8155b。第一工作通道8155b可以沿着中心腔8120(或者在细长主体8103z的壁内)一直延伸到远端8133z。第二工作通道可以类似地沿着中心腔8120延伸或者在细长主体8103z的壁内延伸,但是可以从细长主体8103z的靠近远侧部分8102z的一侧退出(例如,在联动装置8104z之前)。使工具通道8155b在远侧部分附近退出可以有利地限制其与联动装置8104z的转向或弯曲的干扰。
参考图22,在一些实施例中,工具7942z可以被特别设计成与本发明所述的刚性化装置的工作通道一起使用。工具7942z可以包括柔性轴7943z和可膨胀的无损伤尖端7944z。无损伤尖端7944z可以是可膨胀的气囊或周围有泡沫的镍钛合金壳体。在一些实施例中,可膨胀尖端7944z可以被构造成收缩(例如,装有护套的)以经由工作通道被输送,并且在撤回护套并通过工作通道放置之后自膨胀。无损伤尖端7944z的尺寸可以设定,例如不填充胃肠道的腔,因此以便于不接触胃肠道的壁。工具7942z还可以具有连接到尖端7944z或轴7943z的柔性环7945z。在一些实施例中,环7945z可以连接到内窥镜夹(通常用于闭合胃肠道中的各种缺损),以在ESD程序中提供牵引。通过纵向滑动轴7943z,用户可以为夹子提供牵引。可膨胀的无损伤尖端7944z可以有利地允许工具7942z在刚性化装置之前自由前进,而不用担心它会造成创伤或被胃肠道卡住。通过将柔性环7945z钩在夹子上,工具7942z可以通过柔性轴7943z的简单来回运动获得良好的牵引。
本发明所述的任何刚性化装置可以具有一个或者多个远端部分,该远端部分具有与刚性化装置的主细长主体不同的设计。例如,如图23所示,刚性化装置5500可以具有主细长主体5503z和远端部分5502z。只有远端部分5502z、只有主细长主体5503z、或者远端部分5502z和主细长主体5503z两者均可以如本发明所述被刚性化(例如通过真空和/或压力)。在一些实施例中,5502z、5503z中的一个部分由压力激活,而另一部分由真空激活。在其他实施例中,两个部分5502z、5503z分别由压力或真空激活。
参考图24,在一些实施例中,远端部分5702z可以包括不同于主细长部分5703z的编织物的刚性化编织物。例如,在一个实施例中,远端部分5702z中相对于纵轴线的编织角可以大于主细长主体5703z的编织角。例如,远端部分中的编织角可以是40度,而主细长主体中的编织角可以是20度。编织物可以稍微重叠,并用柔性粘合剂连结。这些设计可以在非刚性化状态下给予远端部分5702z比主细长部分5703z更大的弯曲柔性。例如,具有更柔性的远侧尖端可以有利地防止尖端处的扭曲和拖曳(由固定编织物端部引起),和/或可以有利地在穿过体腔的导航过程中提供柔性,以防止对解剖结构的损伤。在另一个实施例中,远端部分5702z中相对于纵轴线的编织角可以小于主细长主体5703z的编织角。这可以使远端部分5702z在刚性化状态下相对于主细长主体5703z更具刚度。例如,在远端部分5702z中具有更大的刚度可以有利地提供稳定的平台,用于经由中心腔移动或输送医疗装置并从刚性化装置5700的远端移出。
参考图25,在一些实施例中,远端部分5802z可以包括被被动激活的多个联动装置5804z。各联动装置5804z可以在一个或多个枢轴点处被连接在一起,并且可以有利地提供确定性的弯曲(即,在特定和预定方向上的弯曲)。另外,联动装置5804z可以有利地为远端部分5802z提供扭转刚性,同时为弯曲提供高柔性。联动装置5804z可以被被动激活,例如,当装置5800在解剖结构中移动时通过挠曲激活。远端部分5802z可以包括例如1-100个联动装置5804z,例如1、2、4、6、8、10、16、20、30或40个联动件5504z。在一些实施例中,联动装置5804z可以由被动切割的弯曲部分(flexture)形成,例如激光切割管或支架。
参考图26,在其他实施例中,远端部分7602z可以包括多个联动装置7604z,这些联动装置7604z通过例如线缆7624主动地控制,用于实现刚性化装置7600的转向。装置7600类似于装置5800,除了它包括构造成控制装置移动的线缆7624。尽管图26中未示出线缆7624穿过刚性化细长主体7603z(即,具有外壁7601、编织层7609和内层7615),但是线缆7624可以以如本发明别处所述的任何方式延伸穿过其中。在一些实施例中,刚性化细长主体7603z的一个或多个层可以延续到远端部分7602z中。例如,如图26所示,内层7615可以延续到远端部分7602z中,如,可以位于联动装置7604z的径向内部。类似地,来自刚性化近端部分的任何附加层(例如,编织层7609或外层7601)可以延续到远端部分7602z中和/或位于联动装置7604z的径向内部。在其他实施例中,刚性化细长主体7603z中的所有层都不延续到远端部分2702z中。联动装置7604z(以及这里描述的任何联动装置)可以包括其上的盖件7627z。盖件7627z可以有利地使远端部分7602z无创伤和/或光滑。盖件7627z可以是膜,例如膨胀的PTFE。膨胀的PTFE可以有利地提供光滑、低摩擦的表面,其抗弯曲性低,但抗扭曲性高。
图27A-E示出了另一个示例性远端部分4302z,其包括多个例如通过线缆4324主动地控制的联动装置4304z,用于实现刚性化装置的转向。在一些实施例中,如图27A-27E所示,联动装置4304z的枢轴可以是渐开线,类似于齿轮的齿,以减小局部接触阻力。线缆4324可以定位在延伸刚性化装置长度的线缆引导件(例如,套管或盘管)内。在一些实施例中,线缆4324(以及线缆引导件)可以在刚性化装置的壁内延伸。线缆引导件可有利地确保拉伸载荷通过线缆引导件而不是由刚性化装置的壁来承载,从而当载荷施加到联动装置4304z时,壁的结构不会不利地偏转。在一些实施例中,线缆引导件和线缆4324可以具有多余的长度,以说明(account for)刚性化装置的弯曲。例如,这种多余的长度可以在刚性化装置的壁内交织(woven)或卷曲。此外,线缆4324可以穿过联动装置4304z中的孔和/或凹槽(例如,参见图27C),同时保持除此之外在壁内自由浮动(从而说明刚性化装置的弯曲)。当线缆4324被激活时,联动装置4304z相对于彼此枢转,从而为刚性化装置的远端部分提供转向。用于转向的联动装置4304z和线缆4324的激活可以通过致动器(例如,现场的电机、电流激活(热)镍钛锘线、近端致动器(通常为不锈钢、钨或复合材料)、液压装置和/或EAP(电激活聚合物))来实现。这种转向机构可以有利地提高临床实用性。此外,这种转向允许通过中心腔(例如,内窥镜或导丝)定位的装置朝着期望的解剖位置转向且更容易到达期望的解剖位置。
当线缆用于使远端部分转向时,线缆(可以在或者不在线缆引导件中)可以以多种不同的方式穿过本发明所述的刚性化装置的壁。图28-39B示出了带有线缆引导件的刚性化装置的示例性构造(为了清楚起见,在图28-39B中省略了一些壁层)。例如,图28示出了刚性化装置6200,该刚性化装置6200具有在外部径向间隙层6207内(并且因此在编织层6209和外层6201之间)的线缆引导件6299中延伸的线缆6224。在一些实施例中,线缆6224和线缆引导件6299中的每一个都可以围绕圆周大致等距地定位(即,当使用四根线缆时,相邻线缆之间相距约90度)。在其他实施例中,线缆6224和线缆引导件6299中的一个或多个可以紧密地组合在一起(例如,在相同的象限内),而不是相互分开。此外,在一些实施例中,线缆6224和/或引导件6299可以围绕刚性化装置6200的圆周不对称地分布。
图29示出了刚性化装置6300,其中线缆6324和线缆引导件6399位于内部径向间隙层6311内(并因此位于编织层6309与刚性化装置的内层如囊6321之间)。例如,当压力被提供到压力间隙6312时,囊6321可以推压编织层6309,并且编织层相应地推压外层6301,同时编织层6309不会以挤压或以其他方式冲击线缆6234。同样,线缆6324和线缆引导件可以围绕刚性化装置6300的圆周等距或不对称地定位。
参考图30,在一些实施例中,刚性化装置6400可以具有至少部分地与加压或真空区域分离的线缆6424和线缆引导件6499。例如,如图30所示,管状囊层6421可以围绕着压力间隙6412。线缆6424和线缆引导件6499中的一些或全部可以位于内层6415和编织层6409之间的间隙6407中,并且周向邻近管状囊层6421。有利地,在这种构造中,线缆6424和线缆引导件6499都可以最小程度地受到囊层6421的加压的影响,并且基本上不向壁提供附加的堆叠高度或厚度。
参考图31,在一些实施例中,刚性化装置6500可以包括多个周向间隔开的管状囊6521,使得每个线缆6524和线缆引导件6599可以装配在相邻管状囊6521之间的间隙6507中。
参考图32,刚性化装置6600类似于装置6500,除了线缆6624和引导件6699成对地分组以减少所需的管状囊6621的数量(例如,可以有两个管状囊6621和位于其间的两对线缆6624和引导件6699)。
参考图33,刚性化装置6700类似于装置6500,除了每个管状囊6721包括围绕在其周围的管状编织层6709(即,不同于装置6500具有单个编织层6509)。当向压力间隙6712提供加压介质时,囊6721可以膨胀以挤压每个单独的管状编织物6709,管状编织物6709可以膨胀以挤压内层6715和外层6701。或者,不是所有的囊都可以同时加压(例如,只有1个或2个),使得该装置仅围绕圆周部分刚化。这可以仅沿着装置的一部分产生刚度,同时仍然能够在其他部分处具有柔性,这可以让装置在被施加偏转载荷的情况下产生优先运动。
参考图34,在一些实施例中,刚性化装置6800可以包括编织层6809的条带(即,扁平状编织物而不是管状编织物)。编织层6809的每个条带及每个线缆6824和线缆引导件6899可以位于径向间隙6807中。此外,编织层6809的条带可以与线缆6824/6899交替,以最小化刚性化装置6800的壁厚。囊6821可以位于编织层6809条带和线缆6824/引导件6899的径向外侧。当压力介质被供应到压力间隙6812时,囊6821可以将编织层6809的条带径向向内推向最内层6815,以使装置6800刚性化。在其他实施例中,囊6821可以位于编织层6809的条带(和线缆6824/引导件6899)的径向内侧,并且被构造成将编织层6809的条带推向外层6801。
在一些实施例中,参照图35,线缆6924和线缆引导件6999可以被定位成沿着刚性化装置6900的中心腔6920延伸。
在一些实施例中,参照图36,线缆7024和线缆引导件7099可以位于外层7001的径向外侧。线缆7024和引导件7099可以例如位于护套7009z中,护套7009z可以仅在线缆7024上延伸或者可以完全包围外层7001。引导件7099可被仅最小限度地限制在护套7009z内,以便在装置7000的移动过程中自由弯曲(例如,根据引导件7099在刚性化装置7000弯曲时是位于刚性化装置7000中心的内侧还是外侧,从而卷曲或延展至全长)。
参考图37,在一些实施例中,线缆引导件7199(其中具有一根或多根线缆)可以盘绕在刚性化装置7100的外层7101的外侧。额外的线缆引导件同样可以盘绕在其周围。在一些实施例中,线缆引导件7199可以盘绕在刚性化装置7100的其他层周围,例如内层周围。
参考图38A-38B,在一些实施例中,线缆引导件7299(其中具有一根或多根线缆)和管状元件7210z可以围绕内层7215交替盘绕(即,使得线缆引导件7299和管状元件7210z沿着刚性化装置7200的长度形成大致单层)。管状元件7210z可以包括带有内部管状囊7221的外部管状编织物7209。当加压介质被提供给压力间隙7212时,囊7221可以膨胀以向外按压管状编织物7209,管状编织物7209可以向外推动外层(为了清楚起见未示出)。
参考图39A-39B,刚性化装置7300可以类似于装置7200,除了只有线缆引导件7399和管状囊7321可以在间隙7311内围绕内层7315盘绕(注意,为了清楚起见,线缆引导件7399和管状囊7321在图39B中未示出)。编织层7309可以围绕间隙7311径向缠绕。当压力介质被供应到管状囊7321时,囊7321可以膨胀以将编织层7309推向外层7301(为了清楚起见,图39A中未示出)。
应当理解的是,图28-39B中所描述的线缆构造可以用于任何数量的线缆(例如1、2、3、4、5、6、8、12或16根线缆)。此外,线缆可用于转向任何尖端或刚性化装置和/或转向任何远端部分(例如,具有联动装置及不同编织角的部分)。此外,本发明所述的线缆引导件可以是圆的(针对圆线缆)、扁平的、矩形的(针对扁平带状拉伸元件)或上述的组合。此外,在一些实施例中,可以使用其他转向元件来补充代替线缆(例如,气动元件、液压元件、形状记忆合金、EAP(电活性聚合物)或马达)。即使可用于转向的力明显低于嵌套系统刚性化所需的力,特意地将转向所需的元件和刚性化所需的元件分开也能使结构表现出作为长度函数的连续高的刚性化性能。
此外,应该理解的是,图28-39B描述的线缆构造和布置可以类似地用于刚性化装置内的工作通道或其他腔(例如,用于气囊的膨胀腔)的布置。
参考图40A-40D,在一些实施例中,远端部分5902z可以包括一系列联动装置5904z(主动的或被动的),这些联动装置被特别设计成通过施加压力或真空来刚性化。例如,联动装置5904z可以通过枢轴点5928z(例如,可以是线枢轴点)彼此连接。每个枢轴点5928z可以允许联动装置之间以一个自由度弯曲。进一步地,联动装置5904z可以以交替的方式布置,每隔一个联动装置与枢轴点5928z连接,枢轴点5928z定位成与前一个联动装置成90度。每个联动装置5904z在其近端和远端可以具有从枢轴点5928z延伸的切口5975z,以允许联动装置5904z相对于彼此弯曲。进一步地,每个联动装置5904z可以通过相应的拉伸构件5930z连接到相邻的联动装置5904z。拉伸构件5930z可以相对于一个联动装置固定,并且可以至少部分地在相邻联动装置的轨道5931z内可动(例如,在联动装置3203b的轨道5931z内)。联动装置5904z的运动允许拉伸构件5930z在刚性化装置的弯曲过程中,当位于曲线外侧时伸长,当位于曲线内侧时缩短。此外,近端部分5902z可以包括两个滑动夹具5932z,这两个滑动夹具5932z沿着相对的轴线(即,彼此相距90度)附接到拉伸构件5930z上。两个拉伸构件5930z从每个滑动夹具5932z延伸到远端部分5902z的最远端。随着远端部分5902z弯曲,每个滑动夹具5932z的一个线缆元件变短,每个滑动夹具5932z的一个线缆元件变长,从而导致滑动夹具5932z的周向运动。当施加真空或压力时,外套筒(sleeve)可以将滑动夹具5932z压缩到轨道5931z表面。滑动夹具5932Z和轨道5931z表面可以是光滑的、粗糙的或有齿。该压缩力可使滑动夹具5932Z相对于联动件5904z锁定在某一位置,从而固定拉伸构件5930z的位置,并使远端部分在其当前形状下更加坚硬。在2018年7月19日提交的标题为“DYNAMICALLY RIGIDIZING OVERTUBE”、现PCT公开号为WO2019/018682的国际专利申请PCT/US2018/042946中描述了附加的刚性化联动装置和/或接合,其全部内容通过引用结合于此。
参考图41A-41B,在一些实施例中,远端部分6002z可以包括置于部分6007z上的联动装置6004z(主动或被动),该部分6007z通过真空或压力刚性化,如本发明中另外描述的(即,位于具有内层6015、压力间隙6012、囊6021、编织层6009和外层6001的刚性化壁之上)。将联动装置6004z置于刚性化部分之上可以提供联动装置系统的优点(例如,弯曲柔性和扭转刚性),以及当剩余结构刚性化时可以被刚性化的转向或确定性弯曲末端。或者,联动装置可以位于刚性化部分的径向内侧。如图41B所示,线缆引导件6099中的线缆6024可以延伸穿过联动装置6004z,以提供联动装置6004z的可选的主动转向。
参考图42A,在一些实施例中,远端部分6102z可以包括密封在薄层材料6108z(例如,由弹性体、PVC或PEEK制成)内的一系列联动装置6104z(主动或被动)。联动装置6104z和薄层材料6108z可以位于例如编织层6109之上(即,从编织层6109径向向外),并且可以与主细长主体6103z的线圈缠绕管6101保持连续。在该实施例中,当向间隙6112提供压力或真空时,编织层6109可被囊6121压向主细长主体6103z中的线圈缠绕管6101,并压向远端部分6102z中的联动装置护套6108z上以刚性化。联动装置护套6108z由联动装置6104z支撑,使其能够抵抗编织物膨胀的压力。这种设计有利地提供刚性化和联动装置,同时保持低的壁厚和/或直径。远端部分6102z可以包括例如在线缆引导件内延伸的线缆6124,以激活联动装置6104z。
在一些实施例中,可以从刚性化结构的壁内使刚性化结构转向,并且可选地没有任何连接件。图42B示出了压力刚性化结构2500的横截面,其中线缆引导件2599放置在压力间隙2512中,并且可以连接到内层2515。线缆2524从线缆引导件2499延伸到远端部分2502z中,并在锚定点2568处锚固到内层2515。拉动线缆2524将导致远端部分2502z(线缆引导件2599端部远侧)偏转。在一些实施例中,可以省略线缆引导件2599,并且当线缆2524被拉动时,刚性化装置2500将沿着其整个长度弯曲。在一些实施例中,装置2500可以构造成具有远端部分2502z,该远端部分2502z具有比近端细长主体2503z低的弯曲刚度(如本发明所述,例如通过改变编织角或在内层或外层中使用更具柔性的加强元件),以使得远端部分2502z比主体2503z弯曲更多。线缆引导件2599和线缆2524可以位于囊2521和编织物2509之间或者位于编织物2509和外层2501之间。线缆引导件2599和/或线缆2524可以附接到外壁2501。或者,在真空刚性化结构中,线缆引导件2599和线缆2524可以位于内层与编织层之间或者位于编织层与外层之间。在一些实施例中,在线缆2524不在线缆引导件2599内的部分中,可以省略囊2521和编织层2509中的编织物,仅留下内层和外层2515、2501,或者仅留下外层或仅留下内层。
参考图43A-43C,在一些实施例中,远端部分4602z可以包括主动偏转段4646。偏转段4646可包括延伸穿过其中的带状物或脊状物,其在激活时仅在一个或多个预设的方向上提供弯曲。主动偏转段4646可以通过例如使用一个或多个线缆、囊、拉线和/或引入导线偏转成预定形状。主动偏转段4646因此可以在固定位置和固定方向上提供刚性化装置4600的弯曲。在一些实施例中,标记物(例如,不透射线的标记物)可以定位在主动偏转段4646内或近侧,以指示弯曲将发生在哪里和/或主动偏转段4646将在哪个方向弯曲。使用主动偏转段4646来让刚性化装置4600弯曲可能是有利的,例如,当需要弯曲而没有来自解剖结构的帮助时(即,当刚性化装置4600的解剖路径不是预先设定的或者不受解剖结构的约束时)。例如,在二尖瓣的经中隔手术期间,这种弯曲可能有助于在下腔静脉(IVC)和心房中隔之间的开放或相对不受约束的空间中产生弯曲。主动弯曲段4646可构造成如本发明所述刚性化(即,通过压力或真空),从而将主动偏转段4646固定或锁定在弯曲构型中。此外,除了主动偏转段4646之外,刚性化装置4600可以包括可转向远端部分4647(例如,具有联动装置)。如本发明别处所述,可转向远端部分4647可用于将刚性化装置4646的远端指向或定向在期望的方向上(例如,通过线缆和/或沿着四个轴线)。
这里描述的任何刚性化装置可以包括一个或多个单独的刚性化部分。例如,参考图44A-44C,在一些实施例中,刚性化装置900可以沿着其长度具有单独的真空/压力室975a-d(例如,四个真空或压力室)。每个室975a、b、c、d可以具有延伸到它的其自己的真空/压力管线927a-d,用于室975a、b、c、d的单独刚性化。压力密封件929可以在每个室之间和/或远端处延伸。在一些实施例中,具有单独刚性化室975a、b、c、d的刚性化装置900可以包括可转向远端部分902z(例如,具有如本发明中别处所述的联动装置)。控制可转向远端部分902z的线缆924a-d可以使用线缆引导件999来管理(例如,在每个真空室975中可以有至少一个,例如1-4个缆线引导件999)。在一些实施例中,如图44B所示,线缆924a-d、线缆引导件999a-d和/或真空/压力管线927a-d可以在最内层915和编织层909之间的径向间隙911内延伸(因此也位于最外层901下方)。在图44C所示的其他实施例中,线缆924a-d、线缆引导件999a-d和/或真空/压力管线927a-d可以在刚性化装置900的中心腔920内延伸。在刚性化装置900的使用中,处于柔性状态的任何室975a-d可以在线缆拉力的方向上被转向或偏转,而被刚性化的室975a-d将保持在它们的位置且不偏转。有利的是,这种设计让室975a-d交替地处于真空/压力和/或转向方向下,以形成各种复杂的形状,并以最小环路在解剖结构中提供导航。
在一些实施例中,本发明所述的刚性化装置的远端部分可包括用于局部组织稳定的元件,例如抽吸元件、气囊元件或壳状元件(cage element)。例如,参考图45A-45D,在一个实施例中,刚性化装置600可以包括气囊666和延伸到气囊666的气囊充气腔或管667。如图45B-45D所示(为了清楚起见,在6B-6C中已经移除了外层),气囊充气管667可以沿着工作通道655旁边延伸(并且因此位于滑动层613和第一编织层609之间的径向间隙611内)。如图45B-45C所示,充气管667可以被构造成包括可以改变长度的辅助管束回路668(serviceloop,即,如图45B所示变直或如图45C所示获得更大的弯曲),以适应刚性化装置600的弯曲。在一些实施例中,气囊充气管可以绕其轴线螺旋盘绕以适应弯曲。在一些实施例中,真空刚性化装置可以包括位于最内层和编织物之间、位于编织物和外层之间、内层径向向内或外层径向向外的气囊充气管。在一些实施例中,压力刚性化装置可以包括在压力间隙中、在囊和编织物之间、在编织物和外层之间、在内层径向向内或者在外层径向向外的充气腔。例如,充气腔可以类似于本发明中关于工作通道和/或线缆所描述的那样进行定位。
作为另一个示例,图46A-46B显示了与刚性化装置一起使用的示例性真空尖端(tip)5354。真空尖端5354可以包括在最远端面5359上的真空孔5358的周向阵列。此外,真空孔5358的阵列可以连接到沿着刚性化装置延伸的真空管线5356(例如,在刚性化装置的分层壁内或在其旁边)。真空管线5356可以连接到真空源,使得当被激活时,通过真空管线5356向阵列的每个孔5358提供真空(例如,通过环形入口5319z)。因此,可以在尖端5354的最远端面5359(也即刚性化装置的最远端面)上提供抽吸。这种抽吸可用于例如抽吸组织(例如,用于介入手术的稳定化,例如用于乳头插管术,例如用于接近胰管或胆管)。这种抽吸也可作用于例如内窥镜粘膜下层剥离术(ESD),或内窥镜全层切除术(EFTR)。
在一些实施例中,真空尖端5354可以刚好位于刚性化装置的转向部分的远侧,这可以有利地用于将真空尖端5354定向在期望的方向上。此外,在一些实施例中,工具(例如,导丝或镜)可以穿过尖端5354的中心腔5320z并穿过真空孔5358的阵列之间,以允许在抽吸激活时执行程序。
参考图47A-47B,在一些实施例中,真空尖端5254可以在最远端面5259处包括半环形阵列的孔5238,而不是周向阵列的孔。
参考图48A-48B,在一些实施例中,真空尖端5454可以具有带倾角的远端面5459(例如,相对于尖端5454的纵轴线成30-80度的角度,例如30、45、60、70或80度)。具有倾角的远端面可以有利地协助接近具有一定角度的解剖结构,以更容易地附着到局部表面。
这里描述的真空尖端可以有利地提供抽吸,而不会导致内窥镜镜头“红视(red-out)”,因为抽吸可以局部发生(例如,在孔5358处),而不是在内窥镜的镜头处。因此,即使在应用抽吸时,该内窥镜也可以提供组织的可视化。
在一些实施例中,本发明所述的真空尖端可以包括金属化部分和/或具有共同接头的导线,使得真空尖端可以传导电流。这种电流可以用于例如切割或凝结被抽吸的组织。
在一些实施例中,本发明所述的真空尖端可以与不包括刚性化的标准内窥镜或内窥镜型装置一起使用。
本发明所述的任何刚性化装置都可以与手柄一起使用,该手柄被构造成允许手动操纵和/或激活该装置。
图49A-49D示出了示例性的手柄1031。手柄1031包括按钮形式的激活元件1048,其被构造成激活真空或压力(该按钮在图49A和49C中显示为关闭,在图49B和49D中显示为开启)。此外,手柄1031内的流动路径可包括构造为连接到真空或压力源的真空或压力入口端口1049,通过出口1073z连接到刚性化装置的刚性化装置端口1050和连接到大气的通气端口1051。如图49A所示,当激活元件1048处于远侧“关闭”位置时(即,使得刚性化装置的刚性化真空或压力关闭),通气端口1051和刚性化装置端口1050彼此连通,从而将任何刚性化压力或真空排放到空气中,并使得刚性化装置处于柔性构型。如图49B所示,当激活元件1048处于近侧“开启”位置时(即,使得至刚性化装置的真空或压力开启),刚性化装置端口1050和真空或压力入口端口1049彼此连通,从而向刚性化装置提供压力或真空以允许该装置刚性化。在一些实施例中,手柄1031可以被构造成在结合区域1053处结合到刚性化装置(例如,结合到刚性化装置上的内部线圈缠绕管)。如图49C-D所示,手柄包括状态指示器元件1067z,以指示刚性化装置是处于柔性还是刚性构型。在该实施例中,状态指示器1067z构造为:文字“开”在按钮被置于“开”位置时显示,文字“关”在按钮被置于“关”位置时显示。在其他实施例中,状态指示器可以是符号、颜色、光或移动指示器。
本发明中所描述的刚性化装置手柄的激活元件可以是按钮、开关、拨动开关、滑块、螺纹接头、挤压手柄或旋塞。此外,激活元件可以是平面的、扇形的或全向的。指示器元件可以包括文字、灯或随着真空或压力的流动而旋转的元件。例如,参考图50A-50B,在一些实施例中,激活元件1548可以是滑块元件。激活元件1548可以包括被构造为在手柄上滑动的连接元件1574z(例如,中空管或卡扣元件)。指示器元件1567z可以内置在滑块中(例如,当滑块在一个位置时指示“刚性”,当滑块在另一个位置时指示“柔性”)。在图51A-51C中可以看到类似的滑块激活元件1648(这个是正交的)。
在一些实施例中,激活元件和指示器元件两者之一或全部可以置于单独的元件上,而不是在手柄上。例如,激活元件可以沿着手柄与真空或压力泵之间的真空或压力管线定位,可以由脚踏板致动,可以在镜管上,在镜轴上,或者可以夹在患者的床上。在一些实施例中,启动元件可以与手柄分离,但是可以在部分手术过程中夹在手柄上。例如,图52A-52C示出了激活元件1448,其包括用于可拆卸地连接到手柄1431的连接机构1452(例如,c形夹)。将指示器元件和/或激活元件与手柄分开可以有利地允许致动器和指示器被看得更清楚(即,不受人解剖结构的阻碍),和/或可以允许致动器和指示器更容易地被另外的人(例如,手术助理)控制/使用。
图53A-53D示出了手柄1131,其被设计成允许操纵刚性化装置,但是其不包括激活元件或指示器元件。手柄1131包括位于其远端的大止动件或法兰1161,该大止动件或法兰1161可用作手柄1131的插入阻挡件(即,阻止手柄1131移动到解剖结构中),并用作操作者在使用过程中可推靠的面。刚性化装置可以在结合区域1153连接。此外,手柄1131可以包括来自远程激活元件的输入装置1165,其连接到刚性化装置的输出装置1173z。
在一些实施例中,与真空刚性化装置一起使用的手柄可以包括通气端口,以在没有供应真空时(即,当刚性化装置处于柔性构型时)为刚性化装置通气。例如,图54A-54B示出了具有滑阀激活元件1248的手柄1231,该滑阀激活元件1248在一个方向上往返以激活刚性化装置中的真空,并且可以在相反方向上往返以停用真空或压力。当停用刚性化装置的真空或压力时,激活元件1248可以通过通气端口1251进行通气。激活元件1248可以定位在通向手柄的真空或压力管线1232上,例如离手柄4-8英寸远,如6英寸。如图54A所示,带有端部按钮指示器元件1267z的滑阀可以指示刚性化装置处于柔性构型(如图所示)或刚性构型(当沿相反方向推动时)。
参考图55A-55C,激活元件1348可以是旋转阀(例如连接到手柄或如本发明所述的其它地方),并且旋转阀激活元件1348上的滑动指示器1367z可以显示真空或压力开启(如图55A和55C所示)或关闭以及通气(如图55B所示)。
在一些实施例中,与真空刚性化装置一起使用的手柄可以包括被构造成自动将手柄锁定在真空或通气构造中的机构。例如,图56A-56G示出用于与真空刚性化装置7500一起使用的手柄7531。手柄7531包括手柄主体7515z,其被构造为附接至刚性化装置7500。手柄7531还包括开关环形式的激活元件7548,用于向刚性化装置7500提供真空。开关环激活元件7548可以包括磁体7522z,其被配置为与近端磁体7523z(如图56D所示)或远端磁体7524z(如图56E所示)配合。当开关环磁体7522z与近端磁体7523z配合时,手柄7531中的真空进给管线7532与刚性化装置的真空端口7550断开,并且刚性化装置和真空都向大气通气或开放(如图56F所示)。当开关环磁体7522z与远端磁体7523z配合时,手柄7531中的真空进给管线7532连接到刚性化装置的真空端口7550,以便向其提供真空(如图56G所示)。有利的是,磁体7522z、7523z、7524z可以将开关环7548锁定在真空或通气构造中,从而防止在非预期构造中可能导致的对患者的伤害(例如,当处于刚性构型,装置7500可能损坏解剖结构时,试图移动装置使其通过解剖结构)。在一些实施例中,磁体7522z可以是含铁材料,而磁体7523z、7524z可以是磁体,反之亦然。如图56A-56B所示,手柄7531还可以包括用于用户手握的用户把手7521z,具有把手盖件7525z,其被构造成覆盖手柄7531中的真空进给管线7532。此外,真空进给管线7532可以直接连接到开关环激活元件7548。真空进给管线7532在把手盖件7525下方可以具有螺旋或卷绕形状,这可以允许开关环激活元件7548向近侧和远侧移动,而不会被真空进给管线7532限制其运动。真空进给管线7532的螺旋可以从30度到大约1440度。例如,90度(如图56C所示,为了清楚起见,把手盖件被移除)180度、360度和720度。把手盖件7525z可以被设计成使得它覆盖整个真空进给管线7532,即使当螺旋完全围绕手柄7531时。手柄7531还可以包括止动法兰7561,以防止手柄7531移动到解剖结构中(例如,止动法兰可以防止该装置穿过肛门或穿过口腔咬合防护装置);近端手柄端口7526z,用于通过其插入镜或其他工作工具;和/或指示器元件7567z。指示器元件7567z是仅当开关环激活元件7548处于远端位置时才可见的带。指示器元件7567z可以具有与手柄的其余部分不同的颜色和/或明度值,最好是形成鲜明的对比并且在光亮减少情况下也可见的颜色。例如,手柄7531可以是白色的,指示器元件7567z可以是中到深蓝色的。指示器元件7567z带也可以具有与手柄7531的其余部分不同的纹理。例如,它可以有凸起的凸点或交叉影线。这可以让医生轻松地感觉到手柄7531的状态。
在一些实施例中,与压力刚性化装置一起使用的手柄可以包括压力间隙入口和通气间隙入口。图57A-57C示出了连接到压力刚性化装置6200的示例性手柄6231。手柄包括间隙入口6293和通气间隙入口6223。压力间隙入口6293连接到压力间隙6212(通过压力管线6294)。通气间隙入口6223(其可以一直延伸穿过手柄以在其两侧退出)连接到编织层2209周围的间隙6206(在囊6221和最外层6201之间)。通气入口6223可以向大气开放,而间隙入口6293可以连接到压力源(例如,用激活元件激活)。手柄6231可以用于例如操作图16G所描述的装置2200g。在一些实施例中,可将配件添加到间隙入口6293,使得手柄6231可用于操作装置2200i,如参照图16I所述。
在一些实施例中,与压力刚性化装置一起使用的手柄可以在其中包括预先填充的压力介质。例如,在图58A-58E中示出了连接到压力刚性化装置7400的示例性手柄7431。手柄7431包括手柄主体7415z和把手/操作杆7411z,把手/操作杆7411z可被激活以向刚性化装置7400提供压力介质,例如预填充或储存在手柄7431的流体室7412z中的压力介质。流体室7412z可以以例如滚动隔膜7416z为边界。把手/操作杆7411z可以包括与活塞7413z的齿条7414z配合的齿7476z。当把手/操作杆7411z朝向手柄主体7415z移动时,活塞7413z可以朝向流体室7412z的滚动隔膜7416z向远侧移动。当滚动隔膜7416z被向远侧推动时,它迫使压力介质从室7412z通过间隙入口7493到达囊7421外部的压力间隙7412,以进行刚化(并且空气或其他流体同样可以经由通气口7423从编织层7409周围逸出)。在一些实施例中,手柄7431可以包括具有弹簧7477z和探针(feeler)7778z的锁定机构(例如,通过点击打开/点击关闭机构,如圆珠笔中的机构),其被构造为将把手/操作杆7411z锁定在主体7415z上,从而将刚性化装置7400锁定在刚性构型中。类似地,当把手/操作杆7411z再次被推向主体时,把手/操作杆7411可以被释放,且流体可以经由入口7493移回到流体室7412z中。
在一些实施例中,手柄7431可以进一步包括位于室7412z和溢流室7418z之间的减压阀7417z。当流体室7412z中的压力达到预设的最大压力(例如,5个大气压)时,减压阀7417z可以打开,以允许流体被引入溢流室7418z中。流体室7412z可以在制造过程中被过量填充,使得阀7417总是在把手/操作杆7411z初次激活时呈打开状态,这可以确保手柄7431校准至所期望的压力。填充流体室7412z的一种示例性方法可以包括:(1)将手柄7431连接到填充配件,该填充配件连接到通向压力系统的管;(2)在手柄上抽真空以通过该填充配件去除空气;(3)在保持真空的同时,通过填充配件将水、去离子水(DI)、盐水、油或其他不可压缩的流体引入系统;和(4)对压力配件远侧的管进行压接和密封(通过机械压褶,或者熔化管等。),然后移除压力配件,将压接/密封的管留在手柄中。
本发明所述的任何手柄都可以内置压力指示特征。例如,手柄可以具有压力表。手柄可以包括诸如活塞的特征,其可通过被移位以给出装置被加压的视觉指示。手柄可以具有翻转或转动的特征,从而显示不同的颜色;例如,在大气压力下,它可以显示绿点,而在刚性化时显示红点。在一些实施例中,视觉指示可以在荧光透视检查中看到。
如果由于某种原因,手柄通道被堵塞,上述任何压力刚性化手柄都可具有紧急通气特征。紧急通气特征可以允许例如切割装置,从而破坏其压力腔。例如,紧急通气特征可以是手柄远侧的阀(例如,可交换(swabable)阀),使得如果阀被致动,该装置将排出压力并因此去刚性化。
本发明所述的任何刚性化装置可包括内置摄像机、照明设备等,以提供机载成像。在一些实施例中(如下图63所示),摄像机和照明可以位于装置的远侧尖端。在其他实施例中,如图59所示,刚性化装置8200可以包括在装置的远端8202z的近侧(例如,转向联动装置8204z的近侧)安装在细长主体8203z上联动装置的摄像机8234z和照明设备8235z。
在一些实施例中,本发明所述的刚性化装置可被构造为导引器(即,用于引入柔性装置的器械,例如用于介入心脏病学的导引护套)。例如,参照图60,刚性化装置8700可以包括具有锥形远侧尖端8733z的刚性化细长主体8703。装置8700可以进一步包括止血阀8749z和/或冲洗管线8748z。
本发明所述的编织物可以包括网、编织材料、带或布,或者由上述材料来代替。在一些实施例中,编织物可以是非织造的(即,不同角度的纤维可以不在彼此之上或之下,而是位于彼此不交叉的单独层上)。类似地,编织物可以由支架或从皮下注射管切割下来的结构(例如,金属结构)代替。
在一些实施例中,本发明所述的刚性化装置可以被构造成装载在镜或其他器械的侧面上(例如,而不是要求将镜/器械插入刚性化装置的近端)。例如,如图61A-61B所示,刚性化装置400可以沿其长度分开(即,从近端到远端穿过壁纵向分开)。此外,连接特征444可以将分隔壁连接在一起。在一些实施例中,连接特征444可以是可重复使用的。例如,连接特征444可以是一系列磁体,这些磁体可以接合(图61A)以将刚性化装置400保持在一起,并且可以脱离接合(图61B)以为镜/仪器提供侧通道。其他示例性的可重复使用的连接特征包括拉链、互锁拉链公母结构或可重复使用的带子。在一些实施例中,连接特征444可以是永久性的并且不可重复使用,例如永久性胶带或粘合剂。
在一些实施例中,本发明所述的真空及压力多层系统可用于为非圆柱形或非管状结构提供刚度。例如,本发明所述的系统可用于制造在加压和/或刚性化时呈现所需形状的气囊。这种结构可以是柔性结构,然而同时包含表现出高环向刚度的元件,例如丝(拉伸或压缩)或薄纤维股(拉伸)。
在一些实施例中,本发明所述的刚性化装置可包括最内层内的近侧及远侧密封,以在镜或器械和最内层之间形成一定的空间来保持润滑。
在一些实施例中,本发明所述的刚性化装置可以与产品的其他版本结合使用。例如,内窥镜可以包括本发明所描述的刚性化机构,并且刚性化装置可以包括这里描述的刚性化机构。它们可以通过共同使用来创建一个嵌套系统,该系统可以一个接一个地前进,使得其中总有一个元件保持刚性,从而减少或消除环路(即,它们可以创建一个按顺序前进的嵌套系统)。
示例性嵌套系统2300z如图62所示。系统2300z可以包括外刚性化装置2300和内刚性化装置2310(这里,被构造为刚性化镜),它们能够相对于彼此同心或非同心地轴向移动。外刚性化装置2300和内刚性化装置2310可以包括本发明描述的任何刚性化特征。例如,外刚性化装置2300可以包括最外层2301a、编织层2309a和内层2315a,内层2315a包括缠绕在其上的线圈。外刚性化装置2300可以被构造成例如接收最外层2301a和内层2315a之间的真空以提供刚性化。类似地,内镜2310可以包括外层2301b(例如,缠绕有线圈)、编织层2309b、囊层2321b和内层2315b(例如,缠绕有线圈)。例如,内镜2310可以被构造成接收囊2321b和内层2315b之间的压力,以提供刚性化。此外,空气/水通道2336z和工作通道2355可以延伸穿过内刚性化装置2310。另外,内刚性化镜2310可以包括带有摄像机2334z、照明设备2335z和可转向联动装置2304z的远端部分2302z。盖件2327z可以在远端部分2302z上延伸。在另一个实施例中,摄像机和/或照明设备可以在单独的组件中传送(例如,摄像机和照明设备可以在导管中捆绑在一起,并沿着工作通道2355和/或附加的工作通道被传送到最远端2333z)。
内刚性化装置2310和外刚性化装置2300之间可以设置有界面2337z。界面2337z可以是间隙,例如,具有0.001-0.050英寸的尺寸d(见图62),如0.0020英寸、0.005英寸或0.020英寸厚。在一些实施例中,界面2337z可以是低摩擦的,并且具有例如粉末、涂层或叠片结构以减少摩擦。在一些实施例中,在内刚性化装置2310和外刚性化装置2300之间可以有密封,并且介于中间的空间可以用例如流体或水来加压,以产生液体静压轴承。在其他实施例中,在内刚性化装置2310和外刚性化装置2300之间可以有密封,并且介于中间的空间可以用小球填充以减少摩擦。
内刚性化装置2310和外刚性化装置2300能够相对于彼此移动并且交替地刚性化,以便沿着嵌套系统2300z的长度传递弯曲或形状。例如,内装置2310可以被插入到腔中,并弯曲或转向成期望的形状。可以向内刚性化装置2310施加压力,以使编织元件接合并将内刚性化装置2310锁定在该构造中。刚性化装置2300(例如,处于柔性状态)随后可以在内装置2310上推进。当外刚性化装置2300到达内装置2310的尖端时,可以对刚性化装置2300施加真空,以使各层接合并锁定,从而固定刚性化装置的形状。内装置2310可以转换到柔性状态,推进,并且重复该过程。尽管系统2300z被描述为包括刚性化装置和被构造为镜的内装置,但是应当理解,其他构造也是可能的。例如,系统可包括两个外套管、两个导管或外套管、导管和镜的组合。
图63显示了另一个示例性嵌套系统2700z。系统2700z类似于系统2300z,除了它包括连接到内外刚性化装置2710、2700的盖件2738z。盖件2738z可以是例如低硬度和薄壁的,以保证弹性和拉伸。盖件2738z可以是橡胶,例如聚氨酯、乳胶或硅树脂。盖件2728z可以保护内外装置2710、2700之间的界面/径向间隙2337z。盖件2738z可以防止污染物进入内外管之间的空间。盖件2738z可以进一步防止组织和其他物质被截留在内外管之间的空间中。盖件2738z可以伸展,以允许内装置2710和外装置2700在材料的弹性限度内彼此独立地行进。盖件2738z可以以其总是处于最小轻微拉伸的方式结合或附接到刚性化装置2710、2700。该实施例可以从外部进行擦拭以进行清洁。在一些实施例中,盖件2738z可以被配置为“滚动”密封,例如在US6447491中公开的,其全部公开内容通过引用结合于此。
图64A-64B显示了另一个示例性嵌套系统9400z。在该系统9400z中,外刚性化装置9400包括转向和成像(例如,类似于镜),而内装置仅包括刚性化(尽管它可以包括如本发明别处所述的附加转向元件)。因此,外装置9400包括本发明公开的联动装置或其他转向装置9404z、摄像机9434z和照明设备9435z。外装置9400可以进一步包括用于接近内装置9410的中心通道9439(例如腔,如其中的工作通道)。在一些实施例中,波纹管或管环路可以将通道9439z连接到内装置9410的腔。类似于其他嵌套系统,装置9410、9400中的至少一个可在一时间被刚性化,同时另一个可以符合该刚性化和/或移动通过解剖结构。在此处,外装置9400可以引导内装置9410(内装置9410在图64A中示出为相对于外装置9400缩回,并且在图64B中大体上与外装置9400平齐延伸)。有利地,系统9400z可以提供光滑的外表面,以避免挤压解剖结构和/或内外装置9410、9400之间的流体入口。在外装置9400上设有转向还可以为尖端的转向提供额外的杠杆作用。此外,由于外装置9400具有较大的直径及容纳较大摄像机的能力,其可以有助于更好的成像能力。
图65A-65H显示了如本发明所述的嵌套系统2400z的示例性的使用。在图65A中,内刚性化装置2410位于外刚性化装置2400内,而内刚性化装置2410的远端延伸到外刚性化装置2400外面。在图65B中,内刚性化装置2410的远端在期望的方向/取向上弯曲,然后被刚性化(例如,如本发明所述的使用真空或压力)。在图65C中,外刚性化装置2400(处于柔性构型)在刚性化的内刚性化装置2410上推进(包括在弯曲的远端部分上)。一旦外刚性化装置2400的远端在内刚性化装置2410的远端上被充分地推进,随后外刚性化装置2400可以被刚性化(例如,使用本发明所述的真空或压力)。在图65D中,内刚性化装置2410随后可以转换为柔性状态(例如,通过如本发明所述的移除真空或压力,并且通过让转向线缆松弛,使得尖端可以容易移动),并且可以根据需要前进和指向/取向/转向。可选地,在图65D中,内刚性化装置2410可以在其显露出时被主动转向(手动或通过计算控制),使得刚性化外管上的载荷最小化。最小化外刚性化装置2400上的载荷使得该管更容易保持刚性化的形状。一旦内刚性化装置2410被刚性化,外刚性化装置2400可以转变到柔性状态并在其上前进(如图65E所示)。然后可以如图65F-H所示重复该过程。
在一些实施例中,在完成图65A-H所示的顺序时,第三刚性化装置可以滑过前两个刚性化装置(2400,2410)并被刚性化。刚性化装置2400和2410随后可以被撤回。最后,第四刚性化装置可以通过第三管的腔插入。该第四刚性化装置可以具有比刚性化装置2410大的直径和更多的特征。例如,它可以具有更大的工作通道、更多的工作通道、更好的摄像机或上述组合。这项技术可以使两个较小的管(倾向于更加柔性和可操纵)深入人体,同时最终仍可将较大的管送入以用于治疗目的。或者,在上述例子中,第四刚性化装置可以是本领域已知的常规内窥镜。
在一些实施例中,在完成图65A-H所示的顺序时,外刚性化装置2400可被刚性化,之后内刚性化装置2410可被移除。例如,刚性化装置2410可以是“导航”装置,其包括摄像机、照明设备和远端转向部分。“导航”装置2410可以被很好地密封,使得其易于在手术之间被清洗。然后,第二内装置可以被置于刚性化外装置2400内,并且被推进超过外装置2400的远端。第二内装置可以是“治疗”管,包括诸如摄像机、照明设备、水、抽吸以及各种工具等元件。“治疗”装置可以不具备转向部分或刚性化的能力,从而可在治疗管的主体中提供额外的用于包括其他特征的空间,例如执行治疗所用的工具。一旦就位,“治疗”管上的工具可用于在体内进行治疗,例如在人体胃肠道中进行粘膜切除或剥离术。
在另一个实施例中,在完成图65A-H所示的顺序之后或期间,第三装置可以插入内管2410的内部。第三装置可以是刚性化的和/或内窥镜。
尽管本发明所述嵌套系统的外刚性化装置通常被认为通过真空刚性化,而内镜刚性化装置被认为通过压力刚性化,但情况可能相反(即外刚性化装置可以通过压力刚性化,内刚性化装置可以通过真空刚性化),和/或两者可以具有相同的刚性化源(压力和/或真空)。
尽管嵌套系统的内外元件通常被描述为包括集成的刚性化元件,但是刚性化元件可以是分开的(例如,以便允许成像镜元件与刚性化元件之间的相对滑动)。
本发明所描述的嵌套系统的刚性化装置可以被设计成当它们被组装时,内刚性化装置基本上不能在外刚性化装置内旋转。例如,内刚性化装置的外表面可以具有形成键的纵向脊和凹槽。外刚性化装置的内表面可以具有与外内刚性化装置中的相同特征相匹配的相应的脊和凹槽。
本发明所描述的嵌套系统的刚性化装置中的一个或两个可以是可转向的。如果两个刚性化装置都是可转向的,则可以实施一种算法来使任何一个柔性的且纵向移动的刚性化装置转向。该算法可以使柔性刚性化装置转向以预期其形状,从而最小化移动的柔性刚性化装置将刚性装置拉直的趋势。
如果本发明描述的嵌套系统的一个刚性化装置需要真空,而另一个刚性化装置需要压力,则可以构造用户控件,其中一个相对于另一个(外内)的移动涉及扳动开关,该开关在第一状态和第二状态之间切换,在第一状态下,例如,其中一个为了刚性化而加压,而另一个为了柔性化而通气,在第二状态下,其中一个为了柔性化而通气,而另一个为了刚性化而抽真空。该开关可以是例如脚踏板或手动开关。
在一些实施例中,本发明所描述的嵌套系统的交替移动可以通过手动控制。在其他实施例中,交替运动可以通过计算机和/或电动运动控制系统实现自动控制。
本发明所描述的嵌套系统可有利地具有相似的刚度。这可以确保嵌套系统的总刚度较为连续。在此处描述的嵌套系统可以很小,以便适合各种不同的解剖结构。例如,对于神经学上的应用,系统的外径可以在0.05-0.15英寸之间,例如大约0.1英寸。对于心脏病学上的应用,系统的外径可以在0.1-0.3英寸之间,例如大约0.2英寸。对于在胃肠中的应用,系统的外径可以在0.3-1.0英寸之间,例如0.8英寸。此外,本发明所述的嵌套系统即使在小外形中也能保持高刚度。例如,从柔性构型到刚性构型的相对刚度的变化可以是10倍、20倍、30倍甚至更大。另外,这里描述的嵌套系统可以有利地相对于彼此平滑地移动。
本发明所描述的嵌套系统可以有利地导航任意路径,或开放、复杂或曲折的空间,并创建一系列独立的复杂形状。嵌套系统可以进一步有利地提供形状传播,使得形状记忆可从一个元件传递到另一个元件。在一些实施例中,两个管可以周期性地被置于部分或完全柔性状态,使得例如系统的半径或曲率增加,并且周围的解剖结构为系统提供支撑。用于使管刚性化的压力或真空可以降低或停止,以使管置于部分或完全柔性状态。这种瞬间的松弛(例如,1-10秒钟)可以让系统找到更紧密地匹配它所经过的解剖结构的形状。例如,在结肠中,这种松弛可以轻轻地打开解剖结构中的急转弯。
在一些实施例中,内刚性化装置或外刚性化装置的刚度能力可被设计成使得由内刚性化装置在其尖端形成的急转弯在被外刚性化装置复制时逐渐打开(被构造成具有更大的半径),因为形状沿外管向近侧传播。例如,外刚性化装置可以被设计成在刚性化时具有更大的最小曲率半径。
嵌套系统是连续的(即,非分段的),因此提供通过身体(例如,肠)的平滑和连续运动。该嵌套系统可以是一次性的和低成本的。
在一些实施例中,外刚性化装置可以是动态刚性化外套管(例如,如在PCT/US18/42946中所述,其全部内容通过引用结合于此)。在一些实施例中,内刚性化装置可以是刚性化系统或市场上可买到的镜,例如直径为5毫米的鼻镜。与十二指肠镜相比,利用刚性化和嵌套系统能够允许使用较小的镜,该镜可提供更大的柔性(如果需要)、更大的刚性(如果需要)、更强的可操纵性,以及以小得多的曲率半径关节运动的能力。
在一些实施例中,一旦到达目标位置,嵌套系统的内刚性化装置可以被收回。外刚性化装置可以保持刚性化,并且可以通过内元件的空间注入造影剂以进行荧光成像。
射频线圈可用于本发明所描述的任何嵌套系统,以提供嵌套系统所呈现的任何形状的三维表示。该表示可用于重新创建形状或返回给定点(例如,由医生在自动结肠镜检查后进行复查)。
在一些实施例中,本发明所描述的嵌套系统可用作完整的内窥镜,其内部结构承载工作通道、加压管线、真空管线、尖端清洗以及用于照明和成像的电子设备(视觉系统、超声、X光、核磁共振成像)的有效载荷。
本发明所述的嵌套系统可用于例如结肠镜检查。这种结肠镜嵌套系统可以减少或消除环路。它可以消除内窥镜复位(reduction)的需要。没有了环路,该手术可以将乙状结肠镜检查的速度和低成本与结肠镜检查的功效结合起来。此外,结肠镜嵌套系统可以消除清醒镇静及其相关的成本、时间、风险和设施要求。此外,通过使用本发明所述的嵌套系统,可以显著降低对于这种结肠镜检查手术的手术技能。此外,在一些实施例中,本发明所描述的嵌套系统可以提供自动结肠镜检查,其中视觉系统在寻找息肉的同时自动沿结肠中心驱动嵌套系统。这种自动化系统有利地既不需要镇静也不需要医生来进行基本检查,同时允许医生在必要时进行后续检查。
在一些实施例中,本发明所述的刚性化装置可以被构造为刚性化杆。参照图66,杆4900可以包括外层4901、编织层4909和内囊层4921。此外,囊层内的间隙4912可被密封并填充有例如空气或水(例如,以径向向外推动囊层4921)。外层4901可以是丝加强层,例如线圈加强的聚氨酯管。编织层4901可以包括编织股线4933,并且可以具有本发明所述的其他编织层的任何特征。内囊层4921可以由低硬度弹性体制成。杆4900还可以包括柔软和/或锥形的无损伤尖端。
在一些实施例中,内囊层4921的远端可以密封到外层4901,并且杆4900可以包括位于外层4901和内囊层4921之间的入口,以提供用于刚性化的真空。在其他实施例中,内囊层4921的远端可以密封到其自身或者密封到无损伤远侧尖端,并且近端可以构造成具有通向内囊层4921内侧的入口(即,内囊层4921的径向内部),以提供压力刚性化。当使用压力刚性化时,杆4900可以进一步包括在远端和/或近端上的通气孔,以允许空气从内囊层4921和外层4901之间排出(从而允许囊4921将编织层4909完全推向外层4901)。
在一些实施例中,外层4901的外表面可以被涂覆以提供包括亲水涂层的低摩擦表面。在一些实施例中,杆4900的外径可以小于5毫米、小于4毫米或小于3毫米。例如,所述外径可以在2mm和5mm之间,如在2.5mm和3mm之间,如大约2.8mm。在一些实施例中,编织层4909的编织物的角度可以相对于管的纵轴线小于25度,例如大约5-15度。在一些实施例中,在编织层4909内可以有10至50股线,例如20-40股线在其中延伸。
参考图67,杆4900可以用作例如结肠镜检查的加强丝。在这样使用时,结肠镜5091可以插入患者的结肠。如果产生环路(从而阻碍结肠镜的前进),可以将镜5091留在原位,可以冲洗镜5091的工作通道5055,可以将水施加到杆4900的外表面以激活亲水涂层,并且杆4900可以通过工作通道5055以柔性状态(即,未刚性化)插入。一旦杆4900完全插入到内窥镜中,使得杆4900的远端与结肠镜5091的远端齐平时,就可以对杆4900施加真空或压力(例如,通过压力入口和/或连接器5063z),从而使杆刚性化。在一些实施例中,可以通过注射器或锁定吹入器向杆4900提供压力或真空。结肠镜5091可以在杆4900上相对于患者推进,同时保持杆4900相对于患者静止。可以移除真空或压力来推进或移除刚性化杆4900。
有利地,杆4900因此能够以柔性构型插入镜5091中,以便相较于标准加强丝(即,相较于固定刚性的加强丝)容易地在转弯处进行导航。此外,杆4900可以在柔性构型中顺应环形结肠的形状,同时为镜提供在刚性构型中所沿的刚性轨道。杆4900在柔性和刚硬构型之间的动态过渡可以防止镜5091出现不希望的变直(这可能发生在标准加强丝中)。此外,杆4900的无损伤尖端可以防止工作通道5055的损坏。刚性化杆4900还可以相对较长(例如,比镜长),而不妨碍镜的导航,因为镜在刚性化杆4900上沿着刚性化杆4900移动,因此杆4900可以与各种镜一起工作,而不论镜的长度如何。类似地,杆4900可以具有3.2毫米或更小的直径,并且因此可以与各种内窥镜一起工作,而不管其直径如何(因为大多数内窥镜具有3.2毫米或更大的工作通道)。
本发明所述的刚性化系统和装置可用于治疗或接近许多不同的解剖位置。
在一种使用方法中,在外科手术过程中,可以将本发明所述的刚性化装置以柔性构型引入患者体内。一旦刚性化装置的远端被定位经过具有挑战性的解剖结构时(例如,解剖结构的一部分将导致环路或者以其他方式使用标准器械难以经过),刚性化装置可被转变成刚性构型。而后,器械(例如,镜)可以在刚性装置上经过或穿过刚性装置。
例如,本发明所述的装置可用于导航胃肠道,到达胃中的解剖位置,用于通过腹部接近否则被其他器官堵塞的解剖位置,以便介入性内窥镜手术(包括ESD(内窥镜黏膜剥离术)和EMR(内窥镜黏膜切除术)),用于直接胆管镜检查,用于内窥镜逆行胰胆管造影术,用于心脏科应用,用于切除或捕捉胃肠道中的病变,用于肠镜检查,用于EUS,用于接近肺,用于接近肾,用于神经科应用,用于慢性完全闭塞的治疗,用于腹腔镜手动工具,用于对侧腿接近,用于耳鼻喉科应用,用于食管胃十二指肠镜检查,用于经口机器人手术,用于柔性机器人内窥镜检查,用于自然孔口经腔内内窥镜手术,或用于改变的解剖情况。下面进一步描述具体的例子。
进一步地,根据所需的应用,本发明所述的刚性化装置可以具有不同的尺寸。例如,当被设计用于例如胃肠道时,刚性化装置可以具有大约0.3-0.8英寸(例如,0.5英寸)的内径、0.4-1.0英寸(例如,0.6英寸)的外径和50-200厘米、例如75-150厘米的长度。例如,当被设计用于心脏血管时,刚性化装置可以具有例如0.04-0.3英寸(例如0.2英寸)的内径、0.06-0.4英寸的外径和30-130厘米的长度。
本发明所述的刚性化装置可以以至少三种不同的方式用作镜的外套管:(Ⅰ)在镜到达目的地后放置外套管;(Ⅱ)外套管紧跟镜,但保持在镜的尖端近侧,直到镜到达目的地;或者(Ⅲ)点射法。图68A-68B中示出了示例性的刚性化装置2000和镜2091
对于方法Ⅰ,可以使用标准技术将镜2091放置在体内期望的位置,然后可以从近端推进刚性化装置2000,直到刚性化装置2000充分支撑镜2091。例如,为了在结肠中进行切除,医生可以将结肠镜推进到目标部位,然后将刚性化装置几乎或完全推进到内窥镜的尖端。刚性化装置2000随后可以被刚性化。例如,通过提供稳定的手术平台,刚性化装置2000可以有利地增强结肠切除期间的控制。刚性化装置2000还可以有利地促进医生的手在患者体外对镜2091的轴的运动与对镜2091的尖端的运动之间的良好连接(所谓的“1比1”运动)。
对于方法Ⅱ,镜2091可以引导刚性化装置2000(例如,镜2091的远端和刚性化装置2000的远端可能永远不会近似对齐),同时刚性化装置在柔性和刚性状态之间重复切换,以帮助镜推进。例如,当推进镜2091时,刚性化装置2000可以是刚性的,从而有助于防止镜环路且利于镜力的传递。一旦镜2091已经被推进,刚性化装置可以再次变柔性并在镜上向远侧推进。该过程可以重复。
方法Ⅲ可包括以下步骤:(1)刚性化装置2000可处于柔性状态,其远端大致与镜2091的远端对齐;(2)镜2091可以被转向,其中刚性化装置2000的远端位于镜的上,因此被镜2091转向;(3)刚性化装置2000可以被置于反映镜2091的转向位置的刚性状态;(4)镜2091的远端可以被推进。这种点射法可以有利地让镜2091在其尖端所指向的方向上推进。在一些实施例中,可以重复这些步骤以在体腔或腔内推进刚性化装置2000和镜2091。
应当理解的是,方法Ⅰ-Ⅲ可以相互结合使用。此外,在一些实施例中,刚性化装置可以是可转向的,以进一步为镜提供方向。
三种不同的控制方式可用于消化道。例如,如图69A所示,这些技术可以允许内窥镜2691a利用刚性化装置2600a定位于上消化道2646z中。如图69B所示,作为另一个示例,刚性化装置2600b可用于将内窥镜2691b定位在下消化道2647z中。所述的控制方式可以使图69A和69B中所示的定位更容易以及更快地实现,同时最小化出现并发症(例如胃肠道穿孔)的风险,并减少或消除患者对镜环路的不适。
本发明所述的刚性化装置和系统可用于内窥镜逆行胰胆管造影术(ERCP)和/或直接胆管镜检查(DC)。内窥镜逆行胰胆管造影术的目的是诊断和治疗胆管和胰管疾病。最常见的方法是用侧视十二指肠镜进行检查,通过将导丝导航进入胆管和胰管,将造影剂注入这些管道,在荧光镜下观察,并在导丝上将各种工具穿过这些管道。理想情况是直接使用摄像机而不是使用辐射和造影剂注入来对管道进行可视化。通过将小内窥镜放入胆管,人们可以在没有辐射的情况下直接观察胆管。然而,很难将这样的小内窥镜导经过胃并进入胆管,因为镜会形成环路。
由于两个原因,胆管或胰管插管很困难。首先,内窥镜必须很小,以便适合小的管道,这意味着它非常柔性,因而在试图离开胃时会在胃内扭曲。其次,管道入口(乳突)在十二指肠壁一侧,这意味着内窥镜必须弯曲并相对于内窥镜的长轴线以一定角度推进,如果没有偏转抵靠的表面,这是不可能实现的。本发明所述的刚性化装置可用于在ERCP和DC期间提供更优化的路径和稳定性,包括在运动学和临床上具有挑战性的乳突插管任务。例如,本发明所述的装置既可用于到达乳突(通常用十二指肠镜进行),也可用于对胆管和胰腺树进行插管。
参考图70A-72D,本发明所述的刚性化装置可以以多种方式用于ERCP和胰腺/胆管的直接可视化(胆管镜检查)。例如,如图70A-70B所示,可以在胆管镜8391上使用具有可转向远端8302z的刚性化装置8300(其可类似于图25的刚性化装置)。胆管镜8391可以是具有摄像机、照明设备且可选择性地带有工具通道的柔性内窥镜,该工具通道被设计成具有进入胆管所需的弯曲半径和直径。胆管镜8391的弯曲半径可以是0.5英寸,其远端和插入管直径为2-6mm。胆管镜8391可以被置于刚性化装置8300内部,并且刚性化装置8300可以开始于柔性状态。两个装置8300、8391可以一起被导航通过上胃肠道至十二指肠8354(或者当操作者认为有必要时,胆管镜8391可以在刚性化装置8300之前推进,而刚性化装置8300跟随其后)。一旦进入十二指肠8354z,刚性化装置8300可以被刚性化并且被转向以使胆管镜8391朝向管道的入口(乳突8355z)倾斜。刚性化装置8300的转向可被锁定在适当的位置,并且胆管镜8391可以朝向乳突8355推进。导丝8385可以被推动穿过胆管镜8391,并对准乳突8355z的入口,且被推动穿过胆管8357z或胰管8356z(其在胆管8355z中的定位如图70A所示)。如图70B所示,胆管镜8391可以通过导丝8385推进到胆管8357中,以实现直接插管。在该方法中,所述刚性化装置8300可以有利地支撑小型胆管镜8391,以防止其在胃中扭曲,并且刚性化装置8300的转向部分8302z可以有利地使得胆管镜8391偏转并指向乳突。因此,可以实现直接可视化,减少ERCP期间所需的辐射量。
另一个示例性ERCP方法如图71A-71B所示。在该实施例中,可以使用不具有可转向远端的刚性化装置8400。胆管镜8491可用于在刚性化装置8400处于柔性构型时转向刚性化装置8400,以将刚性化装置8400指向乳突8455z。一旦指向正确的方向,刚性化装置8400即可被刚性化。然后,胆管镜8491可以以与以上参考图70A-70B所述相同的方式推进。这种方法可以称为直接胆管镜检查的“点射”法。
另一个示例性ERCP方法如图72A-72D所示。在该实施例中,刚性化装置8500中包括至少两个工作通道(例如,类似于图20A-20B和21A-21B所示的装置)。胆管镜8591初始沿着第一工具通道放置,用于乳突8555z的导航和插管。一旦导丝8585已经穿过胆管8557z(如图72B所示)或胰管(8556z),胆管镜8591可以从第一工具通道移除,同时导丝8585留在管道8557z内的适当位置(如图72C所示)。然后,可以将胆管镜8591置入第二工具通道(例如,如图81所示,其可以侧向延伸出装置8500的壁),这样就可以看到十二指肠侧的乳突8555z(如图72D所示)。第一工具通道可用于穿过其放置更大器械,例如将被置于管道8557z中的支架8558z。在一些实施例中,由于支架8558z占据了管道8557z的大部分直径,并且支架8558z的一部分留在十二指肠8554z内,因此在支架放置期间具有乳突8555z的外部(十二指肠)可视化功能可能是有用的。
在另一个示例性ERCP方法中,类似于图59所示装置的刚性化装置包括贯穿装置的整个长度的单个工具通道。所述的刚性化装置包括刚好在转向部分的近侧连接到刚性化装置外侧的摄像机。插管、ERCP和直接胆管镜检查可以类似于上述方法进行。当使用支架或更大的工具时,可以将胆管镜从工具通道中取出,并且可以在使用更大的器械或支架时,利用刚性化装置的摄像机来观察乳突的外部。
在另一个示例性ERCP方法中,如图46A-46B所示,刚性化装置在其远端包括抽吸尖端。抽吸尖端可以围绕乳突,并可以在尖端上施加抽吸。这一操作可以稳定乳突,使胆管镜更容易瞄准合适的位置以穿过导丝。当用丝或胆管镜推动乳突时,保持乳突的周围组织也可以提供一些反张力。对胆管镜或其他工具的压缩力提供反张力可以减少所需的括约肌切开术(乳突切开术)的数量。
有利的是,本发明所述的用于ERCP的刚性化装置可以是一次性的和无菌的,从而降低感染或患者之间交叉污染的风险。进一步地,该方法可减少辐射,并且通过借助刚性化装置和/或镜的转向功能,可轻松地导引至乳突。
本发明所述的刚性化装置和系统可用于心脏病学和心脏外科手术,包括主动脉瓣和二尖瓣。
通常,在经导管、经皮手术中,临床医生可使用某种具有足够刚度以将导管推进到治疗部位,但又具有足够柔性以顺应解剖结构的柔性杆或轴,来影响接近部位(accesssite)(例如,腹股沟、手臂等的动脉或静脉)的运动。这意味着所有的力或杠杆作用都是在远的接近部位产生的,并且在更局部的解剖结构中反应,以便于:(a)使柔性杆或轴弯曲以导航到手术部位;以及(b)在手术部位提供局部力(线性力和扭矩)。相比之下,本发明所述的动态刚性化装置通过提供一种方法来有效地将接近部位移动到治疗部位,该方法既能穿过曲折的解剖结构到达治疗部位,又能刚性化并在治疗部位独立于解剖反射形成稳定的端口。
本发明所述刚性化装置的优点之一是符合周围解剖结构(例如脉管系统)的能力。引导导管等装置需要具有一定的硬度,以通过解剖结构(例如脉管系统)推进,并执行期望的功能。然而,硬系统会阻碍装置推进到目标解剖结构,其中至少部分原因是高度弯曲的路径,迫使解剖结构与装置保持一致,会导致周围组织和血管受到损伤。相比之下,本发明所述的刚化性装置可以具有足够的柔性,使其能够在脉管中移动,顺应脉管系统而不是重塑脉管系统。所述刚性化装置或嵌套系统所允许的英寸蠕动允许这种灵活的向前运动。一旦装置已经前进到目标部位,刚性化允许保留和利用经过脉管系统的已创建路径。例如,本发明所述的刚性化装置的刚度在柔性状态下可以是典型引导导管的1/10,在刚性状态下可以典型引导导管的5倍。
在一些实施例中,在心脏或脉管系统的经皮手术中可以使用本发明所述的刚性化装置。刚性化装置既能够顺应心脏解剖结构,又能为器械操作提供局部远端支点。目前,在执行经皮手术时,机械固定和稳定发生在接近部位(例如,股静脉、桡动脉、髂静脉等)。如上所述,该固定点产生从接近部位延伸到手术部位的长力臂。此外,如下进一步的详细描述,由典型的硬导管系统在接近部位与目标解剖结构之间产生的机械连接依赖于解剖反射来引导导管尖端并将力传递给所使用的工具。当硬导管系统被弯曲以顺应解剖结构时,其沿着接近路径产生势能。当操作人员在接近部位有意或无意地移动患者时,这种能量可以获得释放。相反地,本发明所述的刚性化装置在刚性化之前符合解剖路径,从而消除了与硬导管系统相关的储存能量。一旦被刚性化,机械固定就可独立于解剖反射而实现,大大减小了力臂,并增强了医生对手术工具的控制,从而得到更可预测的结果。在一些实施例中,刚性化装置可以包括集成的止血阀,消除了对于单独的接近护套的需要。
在一些实施例中,本发明所述的刚性化装置可用于在介入心脏病学或结构心脏病例中对引导护套进行硬化。例如,刚性化装置可用于为经导管主动脉瓣置换(TAVR)装置提供“导轨”,从而防止TAVR导管的尖端刮削和刮擦通常有血栓负担(当前的系统倾向于跨在弓的外部,摩擦斑块,产生栓塞碎片)的主动脉弓的顶部。所述的刚性化装置有助于实现出色的对准和放置,降低的瓣周泄漏以及相较于起搏节点的更优化的放置。
在一些实施例中,本发明所述的刚性化装置可用作输送系统,其可从静脉循环经过右心房和房间隔,通过二尖瓣进入左心房,并顺行进入左心室流出通道及主动脉瓣。这种方式便于进行经导管主动脉瓣植入(TAVI),且避免与主动脉弓及通常为逆向分布的上升主动脉接触
在一些实施例中,本发明所述的刚性化装置可用于输送二尖瓣替换物。也就是说,由于涉及多条血管、跳动的心脏以及在输送植入物之前需要精准对准的进入和稳定,在二尖瓣替换过程中穿过隔膜壁可能特别困难。目前的瓣膜输送平台可能相当刚性,这对于其拉直的解剖结构(如股动脉,可能高度钙化和易碎)来说是危险的。在此所述的刚性化装置可以有利地产生柔性进入的导管,然后以任何特定的人体解剖结构的形状进行刚性化,使得刚性化装置顺应整个解剖路径。因此,本发明所述的刚性化装置可以让临床医生能够创造一个直接通向解剖结构的稳定的机械腔,在没有显著的局部解剖结构负荷的情况下对其进行定位,然后在装置通过其被输送时刚性地稳定在该形状。
图73A描绘了刚性化装置3700的一种实施例,该刚性化装置3700被推进穿过心脏的右心房RA到达左心房。导丝或其他穿刺件及扩张器可用于刺穿房中隔3704,以产生通向左心房LA的通道。刚性化装置3700可以使用本发明所述的方法推进到治疗部位。心脏工具3787(可以是刚性化的,也可以不是刚性化的)可以在刚性化装置3700内与其一起推进。例如,心脏工具3787和刚性化装置3700可以如本发明所述的嵌套系统那样推进,例如图65A-65H中所示的。刚性化的动态特性允许装置3700和工具3787在曲折的解剖结构中推进。刚性化装置3700可以在治疗部位进行一次刚性化,从而为治疗提供稳定的基础。可选地,刚性化装置3700可以包括在其远侧尖端附近的锚定气囊3778,以将刚性化装置3700锚定到心脏的室中,例如,锚定到房中隔3704,从而将管3700的尖端保持在左心房LA中。图73B的细节图示出了气囊3778。气囊3778可以位于绕管3700圆周的任何位置。在一些实施例中,气囊是环形的,并且围绕管3700的圆周。刚性化装置3700可以包括回声尖端。其他的满足实时可视化功能的尖端也是可能的(例如,X光拍摄尖端、盐水袋内的镜等)。
图74A-74B示出了在对小分支血管如冠状动脉进行治疗时使用动态刚性化装置的示例性方法。当导航到这些较小的血管时,通常情况下,在这些区域施加力会导致引导导管或其他推进装置被推出该区域。在这种情况下有时会使用接近护套以提供一些机械优势。然而,使用这种接近护套,在施加力时,如通过塞子推动,整个装置仍会被推出该区域。图74A-74B将标准引导导管的使用与本发明所述的刚性化装置的使用进行了比较。在图74A中,标准引导导管3886用于导航到主冠状动脉3842之一的小孔3845。导丝3885从引导导管3886的尖端延伸,并可用于执行手术(例如,放置支架)。在一些实施例中,引导导管3886可以反射邻近的解剖结构3873,以实现机械优势,防止导管被推回及/或提供更局部的力。相反,图74B示出了本发明所述的刚性化装置3800,其被推进通过小孔3845并进入冠状动脉3842。由于装置3800的刚性化能力,它不需要反射局部解剖结构,而是可以在治疗部位提供固有的稳定性。另外,由于刚性化装置的动态刚性化能力,它可以被推进经过小孔3845并进入冠状动脉3842。
图75A示出了使用动态刚性化外套管系统进行二尖瓣修复的示例性方法。该方法示出了刚性化装置3900如何定位在左心房LA中,使得其独立地保持与治疗部位(在该示例中为二尖瓣)轴向对准。如图75A所示,刚性化装置3900通过脉管系统推进到右心房RA,再通过房中隔进入左心房LA。刚性化装置的端部可被转向,使得延伸穿过管的端部3969的纵轴线3983与期望的治疗区域(例如,瓣膜的一部分)对齐。转向、动态刚性化和尖端可视化能力可以实现刚性化设备的精确定位。例如,轴线3983延伸穿过二尖瓣MV进入左心室LV。刚性化装置3900的另一个位置3964以虚线示出,其轴线延伸穿过二尖瓣MV的小叶。目前二尖瓣修复的方法利用引导导管导航到左心房LA,并且通常无法提供可靠的轴向对准。本发明中公开的使用刚性化装置3900在刚性化之前以柔性状态实现轴向对准的方法提供了相较于诸如在二尖瓣修复过程中当前使用的定位方法的显著优势。这种精确对准在解剖结构的其他区域中也是有好处的(例如,穿过其他瓣膜、在经中隔接近部位、在血管腔内等)。),包括在心脏内放置缝合线、夹子和其他装置的能力,其精度与通常用于开放心脏手术的相当。
参考图75B,在诸如图75A所示的手术中使用的刚性化装置3900可以包括各种构型。在一些实施例中,刚性化装置3900可以使用导丝3985来转向和定位。在一些实施例中,刚性化装置3900可以包括嵌套系统,该嵌套系统包括内刚性化装置3910。
如图75C所示,在一个实施例中,针尖状导管3958z可以通过刚性化装置3900推进,并定位在心脏解剖结构内,例如定位在二尖瓣小叶上方。在一些实施例中,针尖状导管3958z可以包含连接到一定长度的缝合线3959z上的锚定装置3962z(纱布、不锈钢条等),该锚定装置3962z可以穿过组织以为缝合线形成锚定结构。通过刚性化装置输送的缝合线和锚定结构可用于将组织结构缝合在一起,例如用于二尖瓣修复的小叶折叠术。
应当理解的是,包括一个或多个本发明所述刚性化装置的系统可用于除二尖瓣修复之外的心脏手术。例如,该系统可以用于复杂的二尖瓣手术,其中目标可以是在同一手术期间实现小叶修复和二尖瓣环成形术。该系统可用于进行主动脉假体(例如,TAVI)的经中隔输送。在一些实施例中,该系统用于通过经中隔通路进行主动脉瓣修复。动态刚性化外套管的组合可以同步用于将缝合线或其他器械从一个心室传递到另一个心室。在任一这些过程中,本发明所述的动态刚性化系统可有利地提供导管或接近护套,从而提供通向心脏各个室的通用通道。
图76A显示了可以同时放置在心脏的多个室中的示例性双刚性化导管系统。两个刚性化导管4000a、4000b可以轴向对齐,并让临床医生能够将器械从一个导管传递到另一个导管。在使用中,第一刚性化导管4000a可以通过右心房RA导航到左心房LA,该导管的尖端4004面向二尖瓣4081。刚性化导管4000a可以在该位置被刚性化。导管4004a可包括靠近尖端4004的弯曲部分,以正确定位尖端并转向装置。第二导管4000b可以通过主动脉4066z逆行导航到左心室LV中。导管4000b可以被转向和定位,使得尖端4039定位在二尖瓣下方并面向第一导管4000a的尖端4004。导管4000b可以在该位置被刚性化。在第一导管的尖端4004和第二导管的尖端4039之间延伸的轴线4014可与待治疗的区域对齐。这种双通道可以允许例如缝合线从一个导管穿过进入另一个导管和/或允许工具在其间穿过。使用两个导管也可以使手术以更高的精度和准确度进行(例如,可以从顶部或底部或者从顶部和底部去接近治疗部位)。可以用两个这样的刚性化导管4000a、4000b进行手术的例子包括利用标准缝合技术的小叶折叠和利用传统环的瓣膜成形术。每个导管4000a、4000b可以包括多个工作通道,并在心脏内提供固定的接近部位。这些双固定点的提供可以允许通过侵入性小得多的经通道来复制标准的开放心脏外科手术。
图76B示出了图76A的双刚性化导管系统正在用于将缝合线穿过组织。第一刚性化装置4000a位于需要被缝合的组织4061z的第一侧。第二刚性化装置4000b位于该组织4061z的相对侧。由第一装置4000a定位的针导管4058z可以与由第二管4026定位的工具4065z(例如抓钳、圈套器等)结合使用,以使缝合线穿过组织4061z。
参考图77,在一些实施例中,本发明所述的刚性化装置可以在内窥镜手术过程中用作套管针。图77显示了动态刚性化套管针4141和标准套管针4138。在通常情况下,当使用标准套管针4138时,其初始放置可能不正确,需要移除并进行重新定位。与此相反,动态刚性化套管针4141可以允许在放置套管针期间或之后进行微调。如本发明中的关于其他动态刚性化装置所述,动态刚性化套管针4141具有转向能力。利用这种能力,套管针4141可以在期望的方向上弯曲或偏转,然后被刚性化,从而提供比标准套管针更大的控制。动态刚性化套管针4141可以用于心脏和/或身体的其他部位的应用。另外,套管针4141可根据应用来提供不同的尺寸或形状。
参考图78,动态刚性化装置4200可用于主动脉分叉4297。脉管系统的这个区域常常会发生病变,需要基于该部位极其曲折的解剖结构进行复杂的修复。目前,用于治疗该区域的许多导管或其他输送装置向上行进至分叉顶点,然后从该点处向下布置工具。如图78所示,动态刚性化装置4200可以使用转向及动态(例如,周期性)刚性化的组合来围绕分叉4297导航,并且能够到达该区域中的任何治疗部位。例如,图78所示的系统可以通过经皮通道一条腿来治疗另一条腿中的CTO(慢性完全闭塞病变)。
参考图79,具有主动偏转段4746和可转向远端部分4747的刚性化装置4700可用于心脏以进行二尖瓣修复。刚性化装置4700可以定位在左心房LA中,从而其可独立地与治疗部位保持轴向对齐,在本例中,治疗部位为二尖瓣瓣膜MV。刚性化装置4700因此可以通过脉管系统前进到右心房RA,并通过房中隔,进入到左心房LA。刚性化装置的端部可以被转向,使得延伸穿过管的端部4769的纵轴线4783与期望的治疗区域(例如,二尖瓣的一部分)对齐。为了实现期望的定位,主动偏转段4746可以在IVC和房中隔之间相对不受约束的空间中弯曲,而远端可转向部分4747可以定位在左心房LA内,并且朝着二尖瓣MV转向或定向。在这样的位置,刚性化装置4700可以以90度或更大的角度弯曲,并具有大约4-6厘米、例如5厘米的弧半径。
参考图80,用于二尖瓣修复的刚性化装置4800(具有主动偏转段4846和可转向远端部分4847)可以包括附接到其上的远端有效载荷4848(例如,二尖瓣夹、二尖瓣置换或瓣膜成形环)。将远端有效载荷4848附接于刚性化装置4800上,同时仍结合主动偏转段4846及可转向远端部分4847,可有利地减少或消除在此类手术过程中对于外部大口径引导导管的需求。用于二尖瓣手术的导管4800(或4700)可以是例如14-40Fr,其长度为80-120厘米。
一种使用刚性化装置4700或4800的方法可以包括:(1)将所述装置引入远端循环;(2)将所述装置推进到目标解剖结构(例如心脏瓣膜);(3)利用主动偏转段进行第一次弯曲(例如,协商(negotiating)IVC和房中隔之间的弯曲,约90°);(4)使用压力或真空将主动偏转段锁定在弯曲构型中;以及(5)使用可转向远端部分以到达二尖瓣平面和二尖瓣;以及(6)输送治疗或有效载荷。
本发明所述的具有主动偏转部分和可转向远端部分的刚性化装置还可以用于,例如,放置用于胸动脉的穿孔移植物或涉及需要治疗的关键分支血管的腹部动脉瘤修复术。
本发明所述的刚性化装置和系统可用于切除或捕捉胃肠道中的病变。
参考图81A-81F,在一些实施例中,刚性化装置700可以被构造为能够控制延伸穿过工作通道755的工作工具777的方向。例如,刚性化装置700可以包括柔性远端部分702z,其相比于向其近侧延伸的近端刚性化细长主体703z(其可以包括如本发明所述的刚性化特征)是高度柔性的。参照图81A,具有镜转向部分776的内窥镜791可以被置于血管760z中的刚性化装置700内。参照图81B,刚性化装置700可以向远端移动,使得柔性远端部分702被定位在内窥镜791的转向部分776上。如图81C所示,当转向部分776弯曲时,柔性远端部分702z以及所连接的工作通道755可以随之弯曲,从而为工具777在工作通道755中提供转向(例如朝向血管736中的病变779)。如图81D所示,随后工具777可以被从工作通道755中推出并推进到预期的位置(例如,病变779)。参照图81E,随后可以向近侧拉动刚性化装置700,以将柔性远端部分702从可转向部分776移开,并且也进一步将工作通道755向近侧移动。如图81F所示,这允许镜791被转向(利用可转向部分776),而工作工具777的放置或方向不会受到干扰。
本发明所述的刚性化装置和系统可用于肠镜检查,以在几乎所有小肠中通过来诊断和/或治疗疾病。
肠镜检查在运动上具有挑战性,原因有几个,包括因为镜的直径相对较小(9毫米)且长度非常长(2米),它们在通过胃肠道以到达小肠的起点或终点(分别是幽门或回盲瓣)时经常形成环路。
本发明所述的刚性化装置和系统可用于IEUS。
本发明所述的刚性化装置和系统可用于接近肺。例如,刚性化装置2100和镜2191可以被同心地组装(镜位于刚性化装置内部),然后通过嘴沿着气管放置到隆凸。如本发明所详述的,可以在隆凸处采用“点射”方法来将镜推进到左主支气管或右主支气管中。“点射”法可被反复用于选择肺中其他更深的分支。
本发明所述的刚性化装置和系统可用于接近肾脏。例如,刚性化装置2100和镜2191可以被同心地组装(镜位于刚性化装置内部),然后通过尿道放入膀胱。如本发明所详述的,可在膀胱中采用“点射”法将镜推进到左侧或右侧输尿管中。“点射”法可以被重复使用,以帮助镜到达肾脏
本发明所述的刚性化装置和系统可用于导引经过神经学解剖结构。
本发明所述的系统可用于接近颈动脉或通向大脑或通入大脑内部的远端血管。
例如,可以将导丝置入颈动脉。刚性化装置或护套可被放置在导丝上并导入颈动脉。当外套管或护套被放置到目标部位,它即可被刚性化以减少导管或导丝在手术过程中脱垂到主动脉弓中的可能性。
本发明所述的刚性化装置和系统可用于接近和/或治疗CTO(慢性完全闭塞)。
因此,在一些实施例中,刚性化装置可并入介入性心脏术的导管中,使得它们非常易于追踪(柔性),然后可例如在装置用以局部地推动经过解剖结构时刚性化,例如在治疗CTO时。
本发明所述的刚性化装置和系统可以与腹腔镜手动工具一起使用。
本发明所述的刚性化装置和系统可用于对侧腿接近。
本发明所述的刚性化装置和系统可用于耳、鼻、喉(ENT)应用。
本发明所述的刚性化装置和系统可用于在食道、胃、十二指肠镜检查(EGD)过程中执行治疗,例如,在胃的顶部上。
本发明所述的刚性化装置和系统可用于TORS(经口机器人手术)。
本发明所述的刚性化装置和系统可用于NOTES(自然孔口经腔内窥镜手术)。
本发明所述的刚性化装置和系统可用于变化的解剖情况,包括Roux-en-Y。
应当理解,此处关于一个实施例所描述的任何特征能够与此处关于另一个实施例所描述的任何特征相互结合或替代。例如,此处所述的刚性化装置的各个层和/或特征可以相对于其他层进行组合、替换和/或重新排列。
关于与本发明有关的其他细节,包括材料和制造技术,可以在相关领域的技术人员的水平内采用。就通常或逻辑采用的附加行为而言,其同样适用于本发明的基于方法的方面。此外,可以想到,所描述的本发明变型的任何可选特征可以独立地陈述和要求保护,或与本发明所述的任何一个或多个特征组合。同样,对单数项目的提及包括存在多个相同项目的可能性。更具体地说,如本发明和所附权利要求中所使用的,除非上下文另外明确指出,否则单数形式的“一”、“和”、“所述”和“该”包括复数指示物。进一步指出,可以撰写权利要求以排除任何可选元素。因此,该陈述旨在用作与权利要求元素的陈述或“否定”限制的使用有关的“仅”、“只”等等的排他术语的先行基础。除非本发明另外定义,否则本发明使用的所有技术和科学术语具有与本发明所属领域的普通技术人员通常理解的相同的含义。本发明的广度不受本说明书的限制,而仅受所用权利要求术语的一般含义的限制。
在本发明中的特征或元件被描述为位于另一特征或元件“上”时,它可以直接位于另一特征或元件上,或者也可存在介于中间的特征和/或元件。相比之下,在特征或元件被描述为“直接”位于另一特征或元件“上”时,不存在介于中间的特征或元件。也将理解到在特征或元件被描述为“连接”、“附接”或“联接”到另一特征或元件时,它可以直接连接、附接或联接到另一特征或元件,或者可以存在介于中间的特征或元件。相比之下,在特征或元件被描述为“直接连接”、“直接附接”或“直接联接”到另一特征或元件时,不存在介于中间的特征结构或元件。虽然相对于一种实施方式描述或表示,如此描述或表示的特征和元件可适用于其他实施方式。本领域普通技术人员也将理解到被描述为“相邻”另一特征布置的结构或特征可具有与该相邻特征重叠或位于其下侧的部分。
这里使用的术语只出于描述特定实施方式的目的,而不打算限制本发明。例如,如这里使用,单数形式“一”、“一个”和“该”也旨在包括复数形式,除非文中另外清楚指明。还将理解到此说明书中使用的术语“包括”和/或“包含”表明所述特征、步骤、操作、元件和/或部件的存在,但是不排除一个或多个其他特征、步骤、操作、元件、部件和/或其组的存在或添加。如这里使用,术语“和/或”包括相关列举项目中的一个或多个的任何和所有组合,并可以缩写为“/”。
为了便于描述,诸如“下方”、“下面”、“之下”、“上方”、“上面”等空间相对术语可在这里用于描述一个元件或特征与附图所示的另一元件或特征的关系。将理解到空间相对术语旨在包括该装置在使用或操作中的不同定向,除了附图所示的定向之外。例如,如果附图中的装置是倒置的,被描述为位于另一元件或特征“下方”或“之下”的元件也可以定向在另一元件或特征的“上方”。因此,示例性术语“下方”可包括上方和下方两种定向。该装置可通过其他方式定向(转动90度或位于其他定向上),并且这里使用的空间相对描述也相应地得到解释。类似地,术语“向上”、“向下”、“竖直”、“水平”等在这里只用于说明目的,除非另外具体指明。
虽然术语“第一”和“第二”可以在这里用来描述不同的特征/元件,这些特征/元件不应该被这些术语限制,除非文中另外指明。这些术语可用来将一个特征/元件与另一特征/元件区分。因此,下面描述的第一特征/元件可以称为第二特征/元件,并且类似地,下面描述的第二特征/元件可以称为第一特征/元件,而不偏离本发明的教导。
如本发明中在说明书和权利要求书中所使用的,包括如在实施例中所使用的,除非另有明确说明,否则即使该术语没有明确地出现,所有数字可以读成如同前面加了“大约”或“近似”。当描述幅度和/或位置以指示所描述的值和/或位置在合理预期的值和/或位置范围内时,可以使用短语“约”或“近似”。例如,数值的值可以是记载的值(或值范围)的+/-0.1%、记载的值(或值范围)的+/-1%、或者记载的值(或值范围)的+/-2%、记载的值(或值范围)的+/-5%、记载的值(或值范围)的+/-10%等。本发明所列举的任何数值范围旨在包括纳入其中的所有子范围。
Claims (88)
1.一种刚性化装置,包括:
细长柔性管;
位于所述细长柔性管之上的编织层,所述编织层具有相对于细长柔性管为直的时的纵轴线以5-40度的编织角编织在一起的多股股线;
位于所述柔性管和所述编织层之上的外层;以及
位于所述细长柔性管和所述外层之间的入口,其被构造为附接至真空源或压力源;
其中,所述刚性化装置被构造为:当通过入口施加真空或压力时具有刚性构型,并且当不通过入口施加真空或压力时具有柔性构型;以及
其中,所述编织角构造为当所述刚性化装置处于柔性构型时随着刚性化装置弯曲而变化。
2.根据权利要求1所述的刚性化装置,其中所述编织角在10度和35度之间。
3.根据权利要求1所述的刚性化装置,其中所述编织角在15度和25度之间。
4.根据权利要求1所述的刚性化装置,其中所述刚性化装置在刚性构型下的刚度为其在柔性构型下刚度的至少两倍。
5.根据权利要求1所述的刚性化装置,其中所述刚性化装置在刚性构型下的刚度为其在柔性构型下刚度的至少5倍。
6.根据权利要求1所述的刚性化装置,进一步包括与所述编织层相邻并具有比所述编织层低的摩擦系数的滑动层。
7.根据权利要求1所述的刚性化装置,其中所述细长柔性管包括在其中延伸的加强元件。
8.根据权利要求1所述的刚性化装置,其中所述加强元件包括线圈或多个环形元件。
9.根据权利要求1所述的刚性化装置,其中所述多股股线以每英寸4-60根编织在一起。
10.根据权利要求1所述的刚性化装置,其中所述股线包括聚对苯二甲酸乙二酯或不锈钢。
11.根据权利要求1所述的刚性化装置,其中所述编织层相对于细长柔性管提供30-70%的覆盖率。
12.根据权利要求1所述的刚性化装置,其中所述多股股线包括96股或更多股。
13.根据权利要求1所述的刚性化装置,其中所述入口被构造为附接到压力源,并且其中所述刚性化装置进一步包括位于其中的囊层,所述囊层被构造为当通过所述入口供应压力时被推向所述编织层。
14.根据权利要求13所述的刚性化装置,其中所述外层中还包括多个加强元件。
15.根据权利要求1所述的刚性化装置,其中所述入口被构造为附接到真空源,并且其中所述外层为薄柔性护套。
16.根据权利要求1所述的刚性化装置,进一步包括位于所述编织层和所述外层之间的径向间隙,该间隙具有0.00002–0.04英寸的厚度。
17.根据权利要求1所述的刚性化装置,进一步包括可转向远端。
18.根据权利要求1所述的刚性化装置,进一步包括位于所述细长柔性管与所述外层之间的密封通道,所述密封通道包括工作通道、线缆引导件或膨胀腔。
19.一种推进刚性化装置通过体腔的方法,包括:
在所述刚性化装置处于柔性构型时将其插入体腔,其中所述刚性化装置包括细长柔性管、编织层以及外层,所述编织层具有相对于细长柔性管为直的时的纵轴线以5-40度的编织角编织在一起的多股股线,并且其中所述编织角随着刚性化装置在柔性构型中弯曲而变化;以及
当所述刚性化装置已经到达体腔中的期望位置时,激活所述柔性管和所述外层之间的真空或压力以将所述刚性化装置转变为比柔性构型硬的刚性构型。
20.根据权利要求19所述的方法,进一步包括在激活真空或压力后释放真空或压力,以将所述刚性化装置转换回柔性构型。
21.根据权利要求19所述的方法,其中所述编织角在10度和35度之间。
22.根据权利要求19所述的方法,其中所述编织角在15度和25度之间。
23.根据权利要求19所述的方法,进一步包括当所述刚性化装置处于刚性构型时,使镜通过所述刚性化装置。
24.根据权利要求19所述的方法,进一步包括将所述刚性化装置的可转向远端转向通过所述体腔。
25.根据权利要求19所述的方法,其中所述体腔位于胃肠道中。
26.根据权利要求19所述的方法,其中所述体腔位于心脏中。
27.根据权利要求19所述的方法,其中所述体腔位于肾中。
28.根据权利要求19所述的方法,其中所述体腔位于肺中。
29.根据权利要求19所述的方法,其中所述体腔位于大脑中。
30.一种刚性化装置,包括:
细长柔性管;
位于所述细长柔性管之上的编织层;
位于所述柔性管和所述编织层之上的外层;以及
位于所述细长柔性管和所述外层之间的入口,其被构造为附接至真空源或压力源;
其中,所述刚性化装置被构造为:当通过入口施加真空或压力时具有刚性构型,并且当不通过入口施加真空或压力时具有柔性构型;并且其中,刚性构型下所述刚性化装置的刚度与柔性构型下所述刚性化装置的刚度之比大于5。
31.根据权利要求30所述的刚性化装置,其中所述比大于6。
32.根据权利要求30所述的刚性化装置,其中所述比大于10。
33.根据权利要求30所述的刚性化装置,其中所述编织层具有相对于细长柔性管为直的时的纵轴线以5-40度的编织角编织在一起的多股股线。
34.根据权利要求33所述的刚性化装置,其中所述编织角在10度和35度之间。
35.根据权利要求30所述的刚性化装置,进一步包括与所述编织层相邻的滑动层,滑动层具有比所述编织层低的摩擦系数。
36.根据权利要求30所述的刚性化装置,其中所述细长柔性管包括在其中延伸的加强元件。
37.根据权利要求36所述的刚性化装置,其中所述加强元件包括线圈或多个环形元件。
38.根据权利要求30所述的刚性化装置,其中所述编织层包括以每英寸4-60根编织在一起的多股股线。
39.根据权利要求30所述的刚性化装置,其中所述编织层包括编织在一起的多股股线,所述股线包括聚对苯二甲酸乙二酯或不锈钢。
40.根据权利要求30所述的刚性化装置,其中所述编织层相对于细长柔性管提供30-70%的覆盖率。
41.根据权利要求30所述的刚性化装置,其中所述编织层包括编织在一起的96股或更多股。
42.根据权利要求30所述的刚性化装置,其中所述入口被构造为附接到压力源,并且其中所述刚性化装置中进一步包括囊层,所述囊层被构造为当通过所述入口供应压力时被推向所述编织层。
43.根据权利要求42所述的刚性化装置,其中所述外层中还包括多个加强元件。
44.根据权利要求30所述的刚性化装置,其中所述入口被构造为附接到真空源,并且其中所述外层是薄柔性护套。
45.根据权利要求30所述的刚性化装置,进一步包括位于编织层和外层之间的径向间隙,该间隙具有0.00002-0.04英寸的厚度。
46.根据权利要求30所述的刚性化装置,进一步包括可转向远端。
47.根据权利要求30所述的刚性化装置,进一步包括位于所述细长柔性管与所述外层之间的密封通道,所述密封通道包括工作通道、线缆引导件或膨胀腔。
48.一种推进刚性化装置通过体腔的方法,包括:
在所述刚性化装置处于柔性构型时将其插入体腔,其中所述刚性化装置包括细长柔性管、编织层和外层;以及
当所述刚性化装置已经到达体腔中的期望位置时,激活所述柔性管和所述外层之间的真空或压力以将所述刚性化装置转变为比柔性构型硬的刚性构型,其中刚性构型下所述刚性化装置的刚度与柔性构型下的刚度之比大于5。
49.根据权利要求48所述的方法,进一步包括在激活真空或压力后释放真空或压力,以将所述刚性化装置转换回柔性构型。
50.根据权利要求48所述的方法,其中所述比大于6。
51.根据权利要求48所述的方法,其中所述比大于10。
52.根据权利要求48所述的方法,进一步包括当所述刚性化装置处于刚性构型时,使镜通过所述刚性化装置。
53.根据权利要求48所述的方法,进一步包括使所述刚性化装置的可转向远端转向以通过所述体腔。
54.根据权利要求48所述的方法,其中所述体腔位于胃肠道中。
55.根据权利要求48所述的方法,其中所述体腔位于心脏中。
56.根据权利要求48所述的方法,其中所述体腔位于肾中。
57.根据权利要求48所述的方法,其中所述体腔位于肺中。
58.根据权利要求48所述的方法,其中所述体腔位于大脑中。
59.一种刚性化装置,包括:
细长柔性管;
编织层,其位于所述细长柔性管的径向外侧;
与所述编织层相邻的滑动层;
位于所述柔性管、所述编织层以及所述滑动层之上的外层;以及
位于所述细长柔性管和所述外层之间的入口,其被构造为附接至真空源或压力源;
其中,所述刚性化装置被构造为:当通过入口施加真空或压力时具有刚性构型,并且当不通过入口施加真空或压力时具有柔性构型;
其中,所述滑动层被构造为减小所述刚性化装置处于柔性构型时所述编织层与所述细长柔性管或所述外层之间的摩擦。
60.根据权利要求59所述的刚性化装置,其中所述滑动层具有比所述编织层低的摩擦系数。
61.根据权利要求59所述的刚性化装置,其中所述滑动层包括粉末。
62.根据权利要求59所述的刚性化装置,其中刚性构型下所述刚性化装置的刚度是柔性构型下所述刚性化装置的刚度的至少2倍。
63.根据权利要求59所述的刚性化装置,其中刚性构型下所述刚性化装置的刚度是柔性构型下所述刚性化装置的刚度的至少5倍。
64.根据权利要求59所述的刚性化装置,其中所述编织层具有编织在一起的多股股线,其编织角相对于细长柔性管为直的时的纵轴线呈5-40度。
65.根据权利要求64所述的刚性化装置,其中所述编织角在10度和35度之间。
66.根据权利要求59所述的刚性化装置,其中所述细长柔性管包括在其中延伸的加强元件。
67.根据权利要求66所述的刚性化装置,其中所述加强元件包括线圈或多个环形元件。
68.根据权利要求59所述的刚性化装置,其中所述编织层包括以每英寸4-60根编织在一起的多股股线。
69.根据权利要求59所述的刚性化装置,其中所述编织层包括编织在一起的多股股线,所述股线包括聚对苯二甲酸乙二酯或不锈钢。
70.根据权利要求59所述的刚性化装置,其中所述编织层相对于细长柔性管提供30-70%的覆盖率。
71.根据权利要求59所述的刚性化装置,其中所述编织层包括编织在一起的96股或更多股。
72.根据权利要求59所述的刚性化装置,其中所述入口被构造为附接至压力源,并且其中,所述刚性化装置中进一步包括囊层,所述囊层被构造为当通过所述入口供应压力时被推向所述编织层。
73.根据权利要求71所述的刚性化装置,其中所述外层中还包括多个加强元件。
74.根据权利要求59所述的刚性化装置,其中所述入口被构造为附接至真空源,并且其中所述外层是薄柔性护套。
75.根据权利要求59所述的刚性化装置,进一步包括在编织层和外层之间的径向间隙,该间隙具有0.00002-0.04英寸的厚度。
76.根据权利要求59所述的刚性化装置,其进一步包括可转向远端。
77.根据权利要求59所述的刚性化装置,进一步包括位于所述细长柔性管和所述外层之间的密封通道,所述密封通道包括工作通道、线缆引导件或膨胀腔。
78.一种推进刚性化装置通过体腔的方法,包括:
在所述刚性化装置处于柔性构型时将其插入体腔,其中所述刚性化装置包括细长柔性管、编织层、与所述编织层相邻的滑动层以及外层,其中,所述滑动层减小在所述刚性化装置处于柔性构型时所述编织层与所述细长柔性管或所述外层之间的摩擦;以及
当所述刚性化装置已经到达体腔中的期望位置时,激活所述柔性管和所述护套之间的真空或压力以将所述刚性化装置转变为比柔性构型硬的刚性构型。
79.根据权利要求78所述的方法,进一步包括在激活真空或压力后释放真空或压力,以将刚性化装置转换回柔性构型。
80.根据权利要求78所述的方法,其中所述滑动层具有比所述编织层低的摩擦系数。
81.根据权利要求78所述的方法,其中所述滑动层包括粉末。
82.根据权利要求78所述的方法,进一步包括当所述刚性化装置处于刚性构型时,使镜通过所述刚性化装置。
83.根据权利要求78所述的方法,进一步包括将所述刚性化装置的可转向远端转向通过所述体腔。
84.根据权利要求78所述的方法,其中所述体腔位于胃肠道中。
85.根据权利要求78所述的方法,其中所述体腔位于心脏中。
86.根据权利要求78所述的方法,其中所述体腔位于肾中。
87.根据权利要求78所述的方法,其中所述体腔位于肺中。
88.根据权利要求78所述的方法,其中所述体腔位于大脑中。
Applications Claiming Priority (9)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201862700760P | 2018-07-19 | 2018-07-19 | |
| US62/700,760 | 2018-07-19 | ||
| US201862780820P | 2018-12-17 | 2018-12-17 | |
| US62/780,820 | 2018-12-17 | ||
| US201962835101P | 2019-04-17 | 2019-04-17 | |
| US62/835,101 | 2019-04-17 | ||
| US201962854199P | 2019-05-29 | 2019-05-29 | |
| US62/854,199 | 2019-05-29 | ||
| PCT/US2019/042650 WO2020018934A1 (en) | 2018-07-19 | 2019-07-19 | Dynamically rigidizing composite medical structures |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN112714658A true CN112714658A (zh) | 2021-04-27 |
Family
ID=69164712
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201980061388.7A Pending CN112714658A (zh) | 2018-07-19 | 2019-07-19 | 动态刚性化复合医疗结构 |
Country Status (7)
| Country | Link |
|---|---|
| US (8) | US11135398B2 (zh) |
| EP (1) | EP3823711A4 (zh) |
| JP (1) | JP2021531111A (zh) |
| CN (1) | CN112714658A (zh) |
| AU (1) | AU2019307743A1 (zh) |
| CA (1) | CA3106275A1 (zh) |
| WO (1) | WO2020018934A1 (zh) |
Families Citing this family (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12220538B2 (en) | 2008-12-08 | 2025-02-11 | Scientia Vascular, Inc. | Micro-fabricated intravascular devices having varying diameters |
| US11219351B2 (en) | 2015-09-03 | 2022-01-11 | Neptune Medical Inc. | Device for endoscopic advancement through the small intestine |
| US11207502B2 (en) | 2016-07-18 | 2021-12-28 | Scientia Vascular, Llc | Guidewire devices having shapeable tips and bypass cuts |
| CN110191667B (zh) | 2016-08-18 | 2022-06-03 | 海王星医疗公司 | 用于增强小肠视觉效果的装置和方法 |
| WO2019232354A1 (en) | 2018-05-31 | 2019-12-05 | Neptune Medical Inc. | Device and method for enhanced visualization of the small intestine |
| CA3106275A1 (en) | 2018-07-19 | 2020-01-23 | Neptune Medical Inc. | Dynamically rigidizing composite medical structures |
| US12011172B2 (en) | 2018-08-06 | 2024-06-18 | Prytime Medical Devices, Inc. | Occlusion catheter system for full or partial occlusion |
| US11793392B2 (en) * | 2019-04-17 | 2023-10-24 | Neptune Medical Inc. | External working channels |
| WO2021076765A1 (en) | 2019-10-17 | 2021-04-22 | Intuitive Surgical Operations, Inc. | Surgical tool with nested shaft tubes |
| US11396035B2 (en) * | 2019-11-25 | 2022-07-26 | Resonance Technology, Inc. | MRI magnet room cleaning system |
| US12178975B2 (en) | 2020-01-23 | 2024-12-31 | Scientia Vascular, Inc. | Guidewire having enlarged, micro-fabricated distal section |
| WO2021151070A1 (en) * | 2020-01-24 | 2021-07-29 | Washington University | Variable stiffness catheter and methods thereof |
| WO2021202336A1 (en) | 2020-03-30 | 2021-10-07 | Neptune Medical Inc. | Layered walls for rigidizing devices |
| CA3180091A1 (en) | 2020-05-26 | 2021-12-02 | Mark C. Scheeff | Rigidizing devices |
| US20230364382A1 (en) * | 2020-08-06 | 2023-11-16 | Canon U.S.A., Inc. | Catheter shaft with tapered inner diameter for improved flow rate |
| US11717322B2 (en) | 2020-08-17 | 2023-08-08 | Covidien Lp | Flexible cannula having selective rigidity |
| JP2023540342A (ja) * | 2020-09-03 | 2023-09-22 | ネプチューン メディカル インク. | 動的剛性付与ガイドレールおよび使用方法 |
| EP4281169A4 (en) * | 2021-01-25 | 2024-12-18 | Neptune Medical Inc. | Large diameter hemostasis valves |
| CA3206945A1 (en) | 2021-01-29 | 2022-08-04 | Garrett J. GOMES | Devices and methods to prevent inadvertent motion of dynamically rigidizing apparatuses |
| JP7546912B2 (ja) | 2021-02-12 | 2024-09-09 | 国立大学法人東北大学 | 剛性可変変形体および剛性可変機構 |
| EP4056221A1 (de) * | 2021-03-09 | 2022-09-14 | SoftRail Medical AG | Schlauchvorrichtung und verfahren zum selektiven versteifen einer schlauchvorrichtung |
| EP4056222A1 (de) * | 2021-03-09 | 2022-09-14 | SoftRail Medical AG | Drahtvorrichtung und verfahren zum selektiven versteifen einer drahtvorrichtung |
| CA3211622A1 (en) * | 2021-03-10 | 2022-09-15 | Neal Tanner | Control of robotic dynamically rigidizing composite medical structures |
| EP4084703B1 (en) * | 2021-03-18 | 2024-03-13 | Prytime Medical Devices, Inc. | Vascular occlusion catheter |
| AU2022421245A1 (en) * | 2021-12-22 | 2024-06-20 | Neptune Medical Inc. | Methods and apparatuses for reducing curvature of a colon |
| CN119031953A (zh) * | 2022-02-08 | 2024-11-26 | 海王星医疗公司 | 动态刚性化复合医疗结构 |
| CN119255741A (zh) * | 2022-03-25 | 2025-01-03 | 海王星医疗公司 | 用于使用一对刚性化装置导航的方法和设备 |
| WO2023212641A2 (en) * | 2022-04-27 | 2023-11-02 | Neptune Medical Inc. | Hygienic sheath for endoscopy |
| CN119233783A (zh) * | 2022-04-27 | 2024-12-31 | 海王星医疗公司 | 用于内窥镜检查的卫生护套 |
| WO2023225520A2 (en) * | 2022-05-16 | 2023-11-23 | Neptune Medical Inc. | External working channels for endoscopic devices |
| CN116099112B (zh) * | 2022-06-24 | 2025-01-21 | 苏州浩微生物医疗科技有限公司 | 一种可调弯导管结构及相应的介入医疗设备 |
| JP2024098165A (ja) | 2023-01-10 | 2024-07-23 | 富士フイルム株式会社 | 医療器具用案内装置 |
| WO2024249708A1 (en) * | 2023-05-30 | 2024-12-05 | Neptune Medical Inc. | Rigidizing aspiration systems and methods |
| WO2025019816A1 (en) * | 2023-07-19 | 2025-01-23 | Aspero Medical, Inc. | Overtube devices and assemblies for elongate surgical tools |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4425919A (en) * | 1981-07-27 | 1984-01-17 | Raychem Corporation | Torque transmitting catheter apparatus |
| US20070270648A1 (en) * | 2006-05-22 | 2007-11-22 | Kms Medical Llc | Torque-transmitting, variably flexible insertion device and method for transmitting torque and variably flexing an insertion device |
| US7438712B2 (en) * | 2003-03-05 | 2008-10-21 | Scimed Life Systems, Inc. | Multi-braid exterior tube |
| CN102711585A (zh) * | 2009-11-02 | 2012-10-03 | 波士顿科学国际医疗贸易公司 | 具有可改变刚度的柔性内窥镜 |
| CN104168860A (zh) * | 2012-05-09 | 2014-11-26 | 雅培心血管系统有限公司 | 具有液压致动器的导管 |
| US20150216589A1 (en) * | 2014-01-31 | 2015-08-06 | Medtronic Cryocath Lp | Medical device with adjustable flexibility |
Family Cites Families (447)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2268321A (en) * | 1940-11-20 | 1941-12-30 | Wardlyn Corp | Catheter |
| US2767705A (en) | 1954-10-08 | 1956-10-23 | Technical Oil Tool Corp | Sigmoidoscope with suction attachment for immobilizing adjacent tissue |
| US3859986A (en) | 1973-06-20 | 1975-01-14 | Jiro Okada | Surgical device |
| JPS5061890A (zh) | 1973-10-04 | 1975-05-27 | ||
| US4066071A (en) | 1975-08-15 | 1978-01-03 | Nagel John G | Extension pull through device to allow for easier passage of flexible fiber endoscope |
| US4141364A (en) | 1977-03-18 | 1979-02-27 | Jorge Schultze | Expandable endotracheal or urethral tube |
| US4151800A (en) | 1977-04-15 | 1979-05-01 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Thermal insulation protection means |
| US4176662A (en) | 1977-06-17 | 1979-12-04 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Apparatus for endoscopic examination |
| JPS58173558A (ja) | 1982-04-01 | 1983-10-12 | テルモ株式会社 | 医療器具用チユ−ブ |
| SE442377B (sv) | 1984-06-29 | 1985-12-23 | Mediplast Ab | Kateter, sond eller liknande anordning |
| US4690131A (en) | 1985-05-31 | 1987-09-01 | The United States Of America As Represented By The Department Of Health And Human Services | Medical apparatus |
| US4696544A (en) | 1985-11-18 | 1987-09-29 | Olympus Corporation | Fiberscopic device for inspection of internal sections of construction, and method for using same |
| US4676229A (en) | 1986-04-09 | 1987-06-30 | Welch Allyn, Inc. | Biopsy channel for an endoscope |
| US4961738A (en) | 1987-01-28 | 1990-10-09 | Mackin Robert A | Angioplasty catheter with illumination and visualization within angioplasty balloon |
| US4817613A (en) | 1987-07-13 | 1989-04-04 | Devices For Vascular Intervention, Inc. | Guiding catheter |
| US4794912A (en) | 1987-08-17 | 1989-01-03 | Welch Allyn, Inc. | Borescope or endoscope with fluid dynamic muscle |
| US4893613A (en) | 1987-11-25 | 1990-01-16 | Hake Lawrence W | Endoscope construction with means for controlling rigidity and curvature of flexible endoscope tube |
| US4815450A (en) | 1988-02-01 | 1989-03-28 | Patel Jayendra I | Endoscope having variable flexibility |
| US4794412A (en) | 1988-05-16 | 1988-12-27 | Xerox Corporation | Vertical line width control ionographic system |
| DE3829603A1 (de) | 1988-09-01 | 1990-03-15 | Kontron Holding Ag | Ultraschallendoskopeinrichtung |
| GB2226245A (en) | 1988-11-18 | 1990-06-27 | Alan Crockard | Endoscope, remote actuator and aneurysm clip applicator. |
| US4959058A (en) | 1989-03-17 | 1990-09-25 | Michelson Gary K | Cannula having side opening |
| US4962751A (en) | 1989-05-30 | 1990-10-16 | Welch Allyn, Inc. | Hydraulic muscle pump |
| DE3935256C1 (zh) | 1989-10-23 | 1991-01-03 | Bauerfeind, Peter, Dr., 8264 Waldkraiburg, De | |
| US5037386A (en) | 1989-11-17 | 1991-08-06 | Minnesota Mining And Manufacturing Company | Pressure sensing scope cannula |
| US5025778A (en) | 1990-03-26 | 1991-06-25 | Opielab, Inc. | Endoscope with potential channels and method of using the same |
| US5019121A (en) | 1990-05-25 | 1991-05-28 | Welch Allyn, Inc. | Helical fluid-actuated torsional motor |
| US5018436A (en) | 1990-07-31 | 1991-05-28 | Welch Allyn, Inc. | Folded bladder for fluid dynamic muscle |
| US5123421A (en) | 1991-01-16 | 1992-06-23 | C. R. Bard, Inc. | Liquid activated steerable catheter guidewire |
| US5244619A (en) | 1991-05-03 | 1993-09-14 | Burnham Warren R | Method of making catheter with irregular inner and/or outer surfaces to reduce travelling friction |
| US5251611A (en) | 1991-05-07 | 1993-10-12 | Zehel Wendell E | Method and apparatus for conducting exploratory procedures |
| US5503616A (en) | 1991-06-10 | 1996-04-02 | Endomedical Technologies, Inc. | Collapsible access channel system |
| US5188595A (en) | 1991-06-28 | 1993-02-23 | Laserscope | Method for enhanced retention of balloon catheter in body cavity |
| US5217001A (en) | 1991-12-09 | 1993-06-08 | Nakao Naomi L | Endoscope sheath and related method |
| JPH05293077A (ja) | 1992-04-20 | 1993-11-09 | Olympus Optical Co Ltd | 管内挿入装置 |
| US5662587A (en) | 1992-09-16 | 1997-09-02 | Cedars Sinai Medical Center | Robotic endoscopy |
| US5431676A (en) | 1993-03-05 | 1995-07-11 | Innerdyne Medical, Inc. | Trocar system having expandable port |
| US5823961A (en) | 1993-05-12 | 1998-10-20 | Hdc Corporation | Catheter guidewire and flushing apparatus and method of insertion |
| US5531685A (en) | 1993-06-11 | 1996-07-02 | Catheter Research, Inc. | Steerable variable stiffness device |
| JP3383009B2 (ja) | 1993-06-29 | 2003-03-04 | テルモ株式会社 | 血管カテーテル |
| US5577992A (en) | 1993-10-05 | 1996-11-26 | Asahi Kogaku Kogyo Kabushiki Kaisha | Bendable portion of endoscope |
| US5483951A (en) | 1994-02-25 | 1996-01-16 | Vision-Sciences, Inc. | Working channels for a disposable sheath for an endoscope |
| US5746692A (en) | 1994-05-05 | 1998-05-05 | Imagen Medical, Inc. | Catheter and endoscope system with distal protruding ball tip and method |
| US5607435A (en) | 1994-05-23 | 1997-03-04 | Memory Medical Systems, Inc. | Instrument for endoscopic-type procedures |
| US5624381A (en) | 1994-08-09 | 1997-04-29 | Kieturakis; Maciej J. | Surgical instrument and method for retraction of an anatomic structure defining an interior lumen |
| JP3614943B2 (ja) | 1994-09-29 | 2005-01-26 | オリンパス株式会社 | 内視鏡用穿刺針 |
| US5891112A (en) * | 1995-04-28 | 1999-04-06 | Target Therapeutics, Inc. | High performance superelastic alloy braid reinforced catheter |
| US5759151A (en) | 1995-06-07 | 1998-06-02 | Carnegie Mellon University | Flexible steerable device for conducting exploratory procedures |
| US5662621A (en) | 1995-07-06 | 1997-09-02 | Scimed Life Systems, Inc. | Guide catheter with shape memory retention |
| US5632734A (en) | 1995-10-10 | 1997-05-27 | Guided Medical Systems, Inc. | Catheter shape control by collapsible inner tubular member |
| US5810715A (en) | 1995-09-29 | 1998-09-22 | Olympus Optical Co., Ltd. | Endoscope provided with function of being locked to flexibility of insertion part which is set by flexibility modifying operation member |
| US6726677B1 (en) | 1995-10-13 | 2004-04-27 | Transvascular, Inc. | Stabilized tissue penetrating catheters |
| US5749828A (en) | 1995-12-22 | 1998-05-12 | Hewlett-Packard Company | Bending neck for use with invasive medical devices |
| US5749889A (en) | 1996-02-13 | 1998-05-12 | Imagyn Medical, Inc. | Method and apparatus for performing biopsy |
| US5746694A (en) | 1996-05-16 | 1998-05-05 | Wilk; Peter J. | Endoscope biopsy channel liner and associated method |
| US5882345A (en) | 1996-05-22 | 1999-03-16 | Yoon; Inbae | Expandable endoscopic portal |
| GB9610765D0 (en) | 1996-05-23 | 1996-07-31 | Axon Anthony T R | Improvements in or relating to endoscopes |
| US6090099A (en) * | 1996-05-24 | 2000-07-18 | Target Therapeutics, Inc. | Multi-layer distal catheter section |
| US5782811A (en) * | 1996-05-30 | 1998-07-21 | Target Therapeutics, Inc. | Kink-resistant braided catheter with distal side holes |
| NL1003984C2 (nl) | 1996-09-09 | 1998-03-10 | Cordis Europ | Katheter met inwendige verstijvingsbruggen. |
| IT1285533B1 (it) | 1996-10-22 | 1998-06-08 | Scuola Superiore Di Studi Universitari E Di Perfezionamento Sant Anna | Robot endoscopico |
| US6599316B2 (en) | 1996-11-04 | 2003-07-29 | Advanced Stent Technologies, Inc. | Extendible stent apparatus |
| US5779624A (en) | 1996-12-05 | 1998-07-14 | Boston Scientific Corporation | Sigmoid splint device for endoscopy |
| US6159187A (en) | 1996-12-06 | 2000-12-12 | Target Therapeutics, Inc. | Reinforced catheter with a formable distal tip |
| US5951539A (en) | 1997-06-10 | 1999-09-14 | Target Therpeutics, Inc. | Optimized high performance multiple coil spiral-wound vascular catheter |
| US6616623B1 (en) | 1997-07-02 | 2003-09-09 | Idializa Ltd. | System for correction of a biological fluid |
| US5916147A (en) | 1997-09-22 | 1999-06-29 | Boury; Harb N. | Selectively manipulable catheter |
| EP1042029B1 (en) | 1997-12-22 | 2015-09-16 | Celgard, LLC | Device for removal of gas bubbles and dissolved gasses in liquid |
| US20020095175A1 (en) | 1998-02-24 | 2002-07-18 | Brock David L. | Flexible instrument |
| US5989240A (en) | 1998-02-27 | 1999-11-23 | Becton, Dickson And Company | Adaptor for mounting a fluid handling device on a catheter tubing |
| US6190357B1 (en) | 1998-04-21 | 2001-02-20 | Cardiothoracic Systems, Inc. | Expandable cannula for performing cardiopulmonary bypass and method for using same |
| GB9808426D0 (en) | 1998-04-21 | 1998-06-17 | Univ London | Device with means for propelling it along a passage |
| US6217565B1 (en) * | 1998-07-16 | 2001-04-17 | Mark Cohen | Reinforced variable stiffness tubing |
| US5916145A (en) | 1998-08-07 | 1999-06-29 | Scimed Life Systems, Inc. | Device and method of using a surgical assembly with mesh sheath |
| US6296644B1 (en) | 1998-08-26 | 2001-10-02 | Jean Saurat | Spinal instrumentation system with articulated modules |
| US6162171A (en) | 1998-12-07 | 2000-12-19 | Wan Sing Ng | Robotic endoscope and an autonomous pipe robot for performing endoscopic procedures |
| IL128286A (en) | 1999-01-29 | 2004-01-04 | Sightline Techn Ltd | Movement gracefully inside the bowel using a flexible sleeve |
| US6179776B1 (en) | 1999-03-12 | 2001-01-30 | Scimed Life Systems, Inc. | Controllable endoscopic sheath apparatus and related method of use |
| US20040044350A1 (en) | 1999-04-09 | 2004-03-04 | Evalve, Inc. | Steerable access sheath and methods of use |
| US6685632B1 (en) | 1999-05-04 | 2004-02-03 | Cardiothoracic Systems, Inc. | Surgical instruments for accessing and stabilizing a localized portion of a beating heart |
| AU5298000A (en) | 1999-05-26 | 2000-12-12 | Scimed Life Systems, Inc. | A suction device for an endoscope |
| JP3793368B2 (ja) | 1999-06-07 | 2006-07-05 | ペンタックス株式会社 | 飲み込み型内視鏡装置 |
| US6368315B1 (en) * | 1999-06-23 | 2002-04-09 | Durect Corporation | Composite drug delivery catheter |
| US7637905B2 (en) | 2003-01-15 | 2009-12-29 | Usgi Medical, Inc. | Endoluminal tool deployment system |
| US6364878B1 (en) | 1999-07-07 | 2002-04-02 | Cardiac Pacemakers, Inc. | Percutaneous transluminal ablation catheter manipulation tool |
| JP2003508133A (ja) | 1999-08-27 | 2003-03-04 | ヴォルシュレーガー ヘルムート | カテーテル取扱装置 |
| US6506149B2 (en) | 1999-09-07 | 2003-01-14 | Origin Medsystems, Inc. | Organ manipulator having suction member supported with freedom to move relative to its support |
| AU7381900A (en) | 1999-09-24 | 2001-04-30 | Omnisonics Medical Technologies, Inc. | Variable stiffness medical device |
| US6780151B2 (en) | 1999-10-26 | 2004-08-24 | Acmi Corporation | Flexible ureteropyeloscope |
| US6533752B1 (en) | 2000-01-05 | 2003-03-18 | Thomas C Waram | Variable shape guide apparatus |
| US6699179B2 (en) | 2000-01-27 | 2004-03-02 | Scimed Life Systems, Inc. | Catheter introducer system for exploration of body cavities |
| US6517477B1 (en) | 2000-01-27 | 2003-02-11 | Scimed Life Systems, Inc. | Catheter introducer system for exploration of body cavities |
| WO2001070096A1 (en) | 2000-03-23 | 2001-09-27 | Atropos Limited | An insertion device for an endoscope |
| US8517923B2 (en) | 2000-04-03 | 2013-08-27 | Intuitive Surgical Operations, Inc. | Apparatus and methods for facilitating treatment of tissue via improved delivery of energy based and non-energy based modalities |
| US6610007B2 (en) | 2000-04-03 | 2003-08-26 | Neoguide Systems, Inc. | Steerable segmented endoscope and method of insertion |
| US6468203B2 (en) | 2000-04-03 | 2002-10-22 | Neoguide Systems, Inc. | Steerable endoscope and improved method of insertion |
| US6984203B2 (en) | 2000-04-03 | 2006-01-10 | Neoguide Systems, Inc. | Endoscope with adjacently positioned guiding apparatus |
| US6837846B2 (en) | 2000-04-03 | 2005-01-04 | Neo Guide Systems, Inc. | Endoscope having a guide tube |
| US8888688B2 (en) | 2000-04-03 | 2014-11-18 | Intuitive Surgical Operations, Inc. | Connector device for a controllable instrument |
| US20050085693A1 (en) | 2000-04-03 | 2005-04-21 | Amir Belson | Activated polymer articulated instruments and methods of insertion |
| US6858005B2 (en) | 2000-04-03 | 2005-02-22 | Neo Guide Systems, Inc. | Tendon-driven endoscope and methods of insertion |
| US6800056B2 (en) | 2000-04-03 | 2004-10-05 | Neoguide Systems, Inc. | Endoscope with guiding apparatus |
| US6974411B2 (en) | 2000-04-03 | 2005-12-13 | Neoguide Systems, Inc. | Endoscope with single step guiding apparatus |
| US6309346B1 (en) | 2000-06-29 | 2001-10-30 | Ashkan Farhadi | Creeping colonoscope |
| US6572590B1 (en) | 2000-07-13 | 2003-06-03 | Merit Medical Systems, Inc. | Adjustable quick-release valve with toggle capability |
| JP4429495B2 (ja) | 2000-07-28 | 2010-03-10 | オリンパス株式会社 | 内視鏡 |
| JP3927764B2 (ja) | 2000-09-01 | 2007-06-13 | ペンタックス株式会社 | 内視鏡用可撓管 |
| DE10049175A1 (de) | 2000-09-22 | 2002-04-25 | Tea Gmbh | Biologisch abbaubare Funktionsflüssigkeit für mechanische Antriebe |
| JP3600194B2 (ja) | 2000-10-02 | 2004-12-08 | オリンパス株式会社 | 内視鏡 |
| JP2002125921A (ja) | 2000-10-20 | 2002-05-08 | Norikazu Hattori | 内視鏡の付属品及び内視鏡 |
| US6793661B2 (en) | 2000-10-30 | 2004-09-21 | Vision Sciences, Inc. | Endoscopic sheath assemblies having longitudinal expansion inhibiting mechanisms |
| US6684433B2 (en) | 2001-03-07 | 2004-02-03 | Gualtiero G. Giori | Pressure adjustable foam support apparatus |
| US6793621B2 (en) | 2001-03-08 | 2004-09-21 | Atropos Limited | Colonic overtube |
| US6558400B2 (en) | 2001-05-30 | 2003-05-06 | Satiety, Inc. | Obesity treatment tools and methods |
| JP4744026B2 (ja) | 2001-07-30 | 2011-08-10 | オリンパス株式会社 | カプセル内視鏡およびカプセル内視鏡システム |
| WO2003013348A1 (en) | 2001-08-02 | 2003-02-20 | Tadanori Munemoto | Endoscope device |
| US6712832B2 (en) | 2001-10-15 | 2004-03-30 | Tilak M. Shah | Low-pressure medical balloons and method of making same |
| WO2003039354A1 (en) | 2001-10-18 | 2003-05-15 | Atropos Limited | A device to aid advancement of a colonoscope |
| US20030153866A1 (en) | 2001-11-09 | 2003-08-14 | Long Gary L. | Self-propelled, intraluminal device with hollow, cylindrical head and method of use |
| US6616628B2 (en) | 2001-11-16 | 2003-09-09 | Cardiac Pacemakers, Inc. | Steerable catheter with a longitudinally adjustable curved core |
| US6740030B2 (en) | 2002-01-04 | 2004-05-25 | Vision Sciences, Inc. | Endoscope assemblies having working channels with reduced bending and stretching resistance |
| US7493156B2 (en) | 2002-01-07 | 2009-02-17 | Cardiac Pacemakers, Inc. | Steerable guide catheter with pre-shaped rotatable shaft |
| US7338505B2 (en) | 2002-01-09 | 2008-03-04 | Neoguide Systems, Inc. | Apparatus and method for endoscopic colectomy |
| US7717899B2 (en) | 2002-01-28 | 2010-05-18 | Cardiac Pacemakers, Inc. | Inner and outer telescoping catheter delivery system |
| US20030225379A1 (en) | 2002-02-19 | 2003-12-04 | Medamicus, Inc. | Composite stasis valve |
| JP2005518855A (ja) | 2002-03-06 | 2005-06-30 | アトロポス・リミテッド | こわさを変更できる操縦可能な結腸内視鏡プローブ |
| US7261688B2 (en) | 2002-04-05 | 2007-08-28 | Warsaw Orthopedic, Inc. | Devices and methods for percutaneous tissue retraction and surgery |
| WO2003090631A1 (en) | 2002-04-24 | 2003-11-06 | Surgical Connections, Inc. | Resection and anastomosis devices and methods |
| US20030216622A1 (en) | 2002-04-25 | 2003-11-20 | Gavriel Meron | Device and method for orienting a device in vivo |
| US7384422B2 (en) | 2002-05-06 | 2008-06-10 | Pressure Products Medical Supplies, Inc. | Telescopic, separable introducer and method of using the same |
| US20050085829A1 (en) | 2002-05-17 | 2005-04-21 | Esophyx, Inc. | Transoral endoscopic gastroesophageal flap valve restoration device, assembly, system and method |
| US20030216691A1 (en) | 2002-05-17 | 2003-11-20 | Endo-Aid, Inc. | Laproscopic pump |
| US6783491B2 (en) | 2002-06-13 | 2004-08-31 | Vahid Saadat | Shape lockable apparatus and method for advancing an instrument through unsupported anatomy |
| US7753924B2 (en) | 2003-09-04 | 2010-07-13 | Guided Delivery Systems, Inc. | Delivery devices and methods for heart valve repair |
| US20060058582A1 (en) | 2002-06-13 | 2006-03-16 | Usgi Medical Inc. | Disposable shapelocking system |
| US20040243227A1 (en) | 2002-06-13 | 2004-12-02 | Guided Delivery Systems, Inc. | Delivery devices and methods for heart valve repair |
| US7591781B2 (en) | 2002-07-15 | 2009-09-22 | Olympus Corporation | Endoscope system with insertion direction changing guides |
| KR100482275B1 (ko) | 2002-08-09 | 2005-04-13 | 한국과학기술연구원 | 마이크로 캡슐형 로봇 |
| US7947000B2 (en) | 2003-09-12 | 2011-05-24 | Intuitive Surgical Operations, Inc. | Cannula system for free-space navigation and method of use |
| US9808597B2 (en) | 2002-09-12 | 2017-11-07 | Intuitive Surgical Operations, Inc. | Shape-transferring cannula system and method of use |
| US8298161B2 (en) | 2002-09-12 | 2012-10-30 | Intuitive Surgical Operations, Inc. | Shape-transferring cannula system and method of use |
| CH696424A5 (de) | 2002-10-15 | 2007-06-15 | Alexander Von Weymarn Schaerli | Führungseinrichtung insbesondere zum Positionieren von Kathetern in einem Körpergang. |
| US6936003B2 (en) | 2002-10-29 | 2005-08-30 | Given Imaging Ltd | In-vivo extendable element device and system, and method of use |
| US6923754B2 (en) | 2002-11-06 | 2005-08-02 | Senorx, Inc. | Vacuum device and method for treating tissue adjacent a body cavity |
| US7918819B2 (en) | 2002-11-15 | 2011-04-05 | Health & Human Services - NIH | Variable curve catheter |
| JP3965108B2 (ja) | 2002-11-29 | 2007-08-29 | オリンパス株式会社 | 内視鏡の可撓管 |
| US20040186349A1 (en) | 2002-12-24 | 2004-09-23 | Usgi Medical Corp. | Apparatus and methods for achieving endoluminal access |
| US20040186350A1 (en) | 2003-01-13 | 2004-09-23 | Usgi Medical Corp. | Apparatus and methods for guiding an endoscope via a rigidizable wire guide |
| US20060041188A1 (en) | 2003-03-25 | 2006-02-23 | Dirusso Carlo A | Flexible endoscope |
| CN2613655Y (zh) | 2003-03-27 | 2004-04-28 | 刘堂贵 | 可快速拆装的调压阀组 |
| US20050010237A1 (en) | 2003-06-09 | 2005-01-13 | Niazi Imran K. | Catheter to cannulate coronary sinus branches |
| DE602004025366D1 (de) | 2003-07-02 | 2010-03-18 | Cook Inc | Koaxialen Katheter |
| US7291127B2 (en) | 2003-07-28 | 2007-11-06 | Boston Scientific Scimed, Inc. | Variable manipulative strength catheter |
| EP2258322A3 (en) | 2003-09-02 | 2011-05-18 | Aesculap Implant Systems, Inc. | Artificial intervertebral disc |
| US20050124875A1 (en) | 2003-10-01 | 2005-06-09 | Olympus Corporation | Vivo observation device |
| US20080234546A1 (en) | 2003-10-01 | 2008-09-25 | Olympus Corporation | In vivo observation device |
| US20050245899A1 (en) | 2003-10-28 | 2005-11-03 | Swisher David R | Dual purpose adapter |
| US20070088367A1 (en) | 2004-10-22 | 2007-04-19 | Alexander Von Weymarn-Scharli | Device, especially tube or catheter, for at least partially introducing into a body passage |
| JP4217587B2 (ja) | 2003-11-26 | 2009-02-04 | オリンパス株式会社 | 内視鏡用キャップ |
| US7780692B2 (en) | 2003-12-05 | 2010-08-24 | Onset Medical Corporation | Expandable percutaneous sheath |
| JP3791011B2 (ja) | 2003-12-08 | 2006-06-28 | 有限会社エスアールジェイ | バルーン取付治具 |
| DE102004001461A1 (de) | 2004-01-08 | 2005-08-11 | Wollschläger, Helmut, Prof. Dr.med. | Vorrichtung zur Handhabung eines Katheters |
| DE102004003166B4 (de) | 2004-01-21 | 2011-09-15 | Siemens Ag | Katheter |
| US20050165275A1 (en) | 2004-01-22 | 2005-07-28 | Kenneth Von Felten | Inspection device insertion tube |
| AU2013207571B2 (en) | 2004-01-28 | 2015-08-27 | Applied Medical Resources Corporation | Medical tubing |
| JP3877075B2 (ja) | 2004-01-28 | 2007-02-07 | 有限会社エスアールジェイ | 内視鏡装置 |
| EP1943940A1 (en) | 2004-01-30 | 2008-07-16 | Fujinon Corporation | Endoscope applicator and endoscope apparatus |
| US7598651B2 (en) | 2004-03-12 | 2009-10-06 | Sri International | Mechanical meta-materials |
| US7699864B2 (en) | 2004-03-18 | 2010-04-20 | Onset Medical Corporation | Expandable medical access device |
| JP4756851B2 (ja) | 2004-03-19 | 2011-08-24 | オリンパス株式会社 | 内視鏡バルーン制御装置 |
| JP3981364B2 (ja) | 2004-03-19 | 2007-09-26 | オリンパス株式会社 | ダブルバルーン式内視鏡システム |
| US7727228B2 (en) | 2004-03-23 | 2010-06-01 | Medtronic Cryocath Lp | Method and apparatus for inflating and deflating balloon catheters |
| JP3962999B2 (ja) | 2004-03-29 | 2007-08-22 | 有限会社エスアールジェイ | 内視鏡装置 |
| US7321986B2 (en) | 2004-03-31 | 2008-01-22 | International Business Machines Corporation | Configuring cache memory from a storage controller |
| US9801527B2 (en) | 2004-04-19 | 2017-10-31 | Gearbox, Llc | Lumen-traveling biological interface device |
| US20060063973A1 (en) * | 2004-04-21 | 2006-03-23 | Acclarent, Inc. | Methods and apparatus for treating disorders of the ear, nose and throat |
| US7837615B2 (en) | 2004-05-10 | 2010-11-23 | Usgi Medical, Inc. | Shape lockable apparatus and method for advancing an instrument through unsupported anatomy |
| EP1750676B1 (en) | 2004-05-20 | 2014-07-23 | Biosensors International Group, Ltd. | Ingestible device platform for the colon |
| US7708751B2 (en) | 2004-05-21 | 2010-05-04 | Ethicon Endo-Surgery, Inc. | MRI biopsy device |
| US7736379B2 (en) | 2004-06-09 | 2010-06-15 | Usgi Medical, Inc. | Compressible tissue anchor assemblies |
| US7931661B2 (en) | 2004-06-14 | 2011-04-26 | Usgi Medical, Inc. | Apparatus and methods for performing transluminal gastrointestinal procedures |
| JP4980899B2 (ja) | 2004-06-25 | 2012-07-18 | カーネギー メロン ユニバーシティ | 操向可能なフォローザリーダー装置 |
| US8075476B2 (en) | 2004-07-27 | 2011-12-13 | Intuitive Surgical Operations, Inc. | Cannula system and method of use |
| US7143925B2 (en) | 2004-07-28 | 2006-12-05 | Ethicon Endo-Surgery, Inc. | Surgical instrument incorporating EAP blocking lockout mechanism |
| WO2006028763A2 (en) | 2004-09-01 | 2006-03-16 | Chul Hi Park | Inflatable guide device |
| WO2006028281A1 (en) | 2004-09-08 | 2006-03-16 | Olympus Corporation | Capsule type medical device |
| US7771411B2 (en) | 2004-09-24 | 2010-08-10 | Syntheon, Llc | Methods for operating a selective stiffening catheter |
| US7559916B2 (en) | 2004-09-24 | 2009-07-14 | Syntheon, Llc | Catheter with controllable stiffness and method for operating a selective stiffening catheter |
| US7938307B2 (en) | 2004-10-18 | 2011-05-10 | Tyco Healthcare Group Lp | Support structures and methods of using the same |
| US7594888B2 (en) | 2004-10-29 | 2009-09-29 | Depuy Spine, Inc. | Expandable ports and methods for minimally invasive surgery |
| JP3834820B2 (ja) | 2004-11-04 | 2006-10-18 | フジノン株式会社 | 内視鏡装置用のバルーン制御装置 |
| JP3874298B2 (ja) | 2004-11-05 | 2007-01-31 | フジノン株式会社 | 内視鏡装置用のバルーン制御装置 |
| US20060129130A1 (en) | 2004-11-18 | 2006-06-15 | Tal Michael G | Sheath/catheter system with controlled hardness and flexibility |
| US8409111B2 (en) | 2004-11-22 | 2013-04-02 | Bard Peripheral Vascular, Inc. | Removable localizing wire |
| US20060195017A1 (en) | 2004-11-22 | 2006-08-31 | Shluzas Alan E | Expandable device for providing access to the spine |
| US8206287B2 (en) | 2005-02-14 | 2012-06-26 | Olympus Corporation | Endoscope having flexible tube |
| JP4000485B2 (ja) | 2005-02-28 | 2007-10-31 | フジノン株式会社 | 内視鏡装置 |
| US20060200023A1 (en) | 2005-03-04 | 2006-09-07 | Sdgi Holdings, Inc. | Instruments and methods for nerve monitoring in spinal surgical procedures |
| US20060235457A1 (en) | 2005-04-15 | 2006-10-19 | Amir Belson | Instruments having a rigidizable external working channel |
| KR100702155B1 (ko) | 2005-05-12 | 2007-04-02 | 한국과학기술연구원 | 캡슐형 마이크로 로봇 구동 시스템 |
| US7857754B2 (en) | 2005-05-13 | 2010-12-28 | Ethicon Endo-Surgery, Inc. | Apparatus useful for positioning a device on an endoscope |
| WO2006124880A2 (en) | 2005-05-16 | 2006-11-23 | Kenneth Binmoeller | Systems and methods to facilitate endoscopic interventions |
| US20060264707A1 (en) | 2005-05-20 | 2006-11-23 | Kinney Timothy P | Endoscope sheath |
| US20060287666A1 (en) | 2005-06-15 | 2006-12-21 | Usgi Medical Inc. | Apparatus and methods for endoluminal advancement |
| US20070015965A1 (en) | 2005-07-13 | 2007-01-18 | Usgi Medical Inc. | Methods and apparatus for colonic cleaning |
| ATE526863T1 (de) | 2005-08-17 | 2011-10-15 | Kress Juergen | Hygieneschutz für endoskope und endoskop mit hygieneschutz |
| DE102005039601A1 (de) | 2005-08-19 | 2007-02-22 | Karl Storz Gmbh & Co. Kg | Endoskop, insbesondere Duodenoskop für die Mutter-Baby Cholangioskopie |
| JP2007054125A (ja) | 2005-08-22 | 2007-03-08 | Olympus Medical Systems Corp | 内視鏡 |
| US7998132B2 (en) | 2005-09-02 | 2011-08-16 | Boston Scientific Scimed, Inc. | Adjustable stiffness catheter |
| WO2007033379A2 (en) | 2005-09-14 | 2007-03-22 | Neoguide Systems, Inc. | Methods and apparatus for performing transluminal and other procedures |
| US20080188928A1 (en) | 2005-09-16 | 2008-08-07 | Amr Salahieh | Medical device delivery sheath |
| US20070100414A1 (en) | 2005-11-02 | 2007-05-03 | Cardiomind, Inc. | Indirect-release electrolytic implant delivery systems |
| US7798992B2 (en) | 2005-11-04 | 2010-09-21 | Ethicon Endo-Surgery, Inc. | Lumen traversing device |
| DE102005057479A1 (de) | 2005-11-30 | 2007-05-31 | Philipps-Universität Marburg | Anordnung zur Führung von Instrumenten in Hohlräumen |
| US8480576B2 (en) | 2005-12-07 | 2013-07-09 | Faheem A. Sandhu | Access system for minimally invasive spinal surgery |
| US7758501B2 (en) | 2006-01-04 | 2010-07-20 | Depuy Spine, Inc. | Surgical reactors and methods of minimally invasive surgery |
| US20070219411A1 (en) | 2006-01-13 | 2007-09-20 | Olympus Medical Systems Corp. | Overtube and endoscopic treatment system |
| DE102006018489A1 (de) | 2006-02-15 | 2007-10-25 | Epflex Feinwerktechnik Gmbh | Gesteuert versteifbarer Schlauch |
| US8092374B2 (en) | 2006-03-02 | 2012-01-10 | Kevin Smith | Variably flexible insertion device and method for variably flexing an insertion device |
| US9814372B2 (en) | 2007-06-27 | 2017-11-14 | Syntheon, Llc | Torque-transmitting, variably-flexible, locking insertion device and method for operating the insertion device |
| US7988621B2 (en) | 2006-08-10 | 2011-08-02 | Syntheon, Llc | Torque-transmitting, variably-flexible, corrugated insertion device and method for transmitting torque and variably flexing a corrugated insertion device |
| US9155451B2 (en) | 2006-03-02 | 2015-10-13 | Syntheon, Llc | Variably flexible insertion device and method for variably flexing an insertion device |
| US20070239252A1 (en) | 2006-04-10 | 2007-10-11 | Medtronic Vascular, Inc. | A Mechanism to Ensure Placement of Ostial Renal Stents |
| US20120035438A1 (en) | 2006-04-12 | 2012-02-09 | Searete Llc, A Limited Liability Corporation Of The State Of Delaware | Path selection by a lumen traveling device in a body tub tree based on previous path |
| JP4981344B2 (ja) | 2006-04-13 | 2012-07-18 | 富士フイルム株式会社 | 内視鏡装置用バルーンユニット |
| US20070250149A1 (en) | 2006-04-21 | 2007-10-25 | Abbott Laboratories | Stiffening Support Catheters and Methods for Using the Same |
| US7993303B2 (en) | 2006-04-21 | 2011-08-09 | Abbott Laboratories | Stiffening support catheter and methods for using the same |
| US20070260121A1 (en) | 2006-05-08 | 2007-11-08 | Ethicon Endo-Surgery, Inc. | Endoscopic Translumenal Surgical Systems |
| US7905877B1 (en) | 2006-05-12 | 2011-03-15 | Micrus Design Technology, Inc. | Double helix reinforced catheter |
| DE102006024094A1 (de) | 2006-05-17 | 2007-11-22 | Epflex Feinwerktechnik Gmbh | Gesteuert versteifbare Führungsdrahteinheit |
| JP4716922B2 (ja) | 2006-05-23 | 2011-07-06 | オリンパスメディカルシステムズ株式会社 | カプセル型医療装置およびこれを用いた薬剤導入システム |
| US8182415B2 (en) | 2006-06-13 | 2012-05-22 | Intuitive Surgical Operations, Inc. | Minimally invasive surgical system |
| WO2007146325A2 (en) | 2006-06-14 | 2007-12-21 | Optivia Medical Llc | Medical device introduction systems and methods |
| WO2008006114A2 (en) | 2006-07-07 | 2008-01-10 | Fred Kessler | Channeled flexible sleeve for medical articles |
| US8109953B1 (en) | 2006-08-14 | 2012-02-07 | Volcano Corporation | Catheter device, hub assembly and method for traversing total occlusions |
| BRPI0714489B8 (pt) | 2006-08-14 | 2021-06-22 | Cardiorobotics Inc | dispositivo multiarticulado dirigível |
| JP5006596B2 (ja) | 2006-08-21 | 2012-08-22 | オリンパスメディカルシステムズ株式会社 | カプセル内視鏡 |
| WO2008041809A1 (en) | 2006-10-02 | 2008-04-10 | University Industry Cooperation Foundation Korea Aerospace University | Capsule type endoscope device |
| US20080091073A1 (en) | 2006-10-16 | 2008-04-17 | Chul Hi Park | Inflatable actuation device |
| US20080103360A1 (en) | 2006-11-01 | 2008-05-01 | Boris Shtul | Endoscopic device insertable into a body cavity and movable in a predetermined direction, and method of moving the endoscopic device in the body cavity |
| US20080172037A1 (en) | 2006-11-01 | 2008-07-17 | Percutaneous Systems, Inc. | Catheter with adjustable column stability and methods for its use |
| US20080139887A1 (en) | 2006-12-07 | 2008-06-12 | International Polymer Engineering, Inc. | Endoscopic working channel and method of making same |
| US10278682B2 (en) | 2007-01-30 | 2019-05-07 | Loma Vista Medical, Inc. | Sheaths for medical devices |
| SE0700313L (sv) | 2007-02-09 | 2008-07-29 | Danielsson Innovation Ab | Fiskerulle |
| US8425602B2 (en) | 2007-02-09 | 2013-04-23 | Alphatec Spine, Inc. | Curvilinear spinal access method and device |
| US20080200762A1 (en) | 2007-02-16 | 2008-08-21 | Stokes Michael J | Flexible endoscope shapelock |
| ATE474496T1 (de) | 2007-04-04 | 2010-08-15 | Scuola Superiore Di Studi Universitari E Di Perfezionamento Sant Anna | Fernbediente endoskopische kapsel |
| US20080262300A1 (en) | 2007-04-20 | 2008-10-23 | Usgi Medical, Inc. | Endoscopic system with disposable sheath |
| US20080275299A1 (en) | 2007-05-01 | 2008-11-06 | Chul Hi Park | Actuation device |
| WO2008139461A2 (en) | 2007-05-10 | 2008-11-20 | Technion Research & Development Foundation Ltd. | Semi disposable endoscope |
| US8870755B2 (en) | 2007-05-18 | 2014-10-28 | Olympus Endo Technology America Inc. | Rotate-to-advance catheterization system |
| US8226548B2 (en) | 2007-07-07 | 2012-07-24 | Cannuflow, Inc. | Rigid arthroscope system |
| JP5001082B2 (ja) | 2007-07-18 | 2012-08-15 | 富士フイルム株式会社 | 内視鏡装置 |
| US8388519B2 (en) | 2007-07-26 | 2013-03-05 | Sri International | Controllable dexterous endoscopic device |
| JP2009045141A (ja) | 2007-08-16 | 2009-03-05 | Fujifilm Corp | 内視鏡用挿入補助具及び内視鏡 |
| US20090216284A1 (en) * | 2007-08-27 | 2009-08-27 | Singfatt Chin | Balloon cannula system for accessing and visualizing spine and related methods |
| JP2009055955A (ja) | 2007-08-29 | 2009-03-19 | Olympus Medical Systems Corp | 内視鏡装置 |
| US8287447B2 (en) | 2007-08-29 | 2012-10-16 | Minos Medical | Outer tube for natural orifice surgery |
| JP5096084B2 (ja) * | 2007-09-07 | 2012-12-12 | オリンパス株式会社 | 内視鏡装置 |
| US8382785B2 (en) | 2007-09-27 | 2013-02-26 | Swan Valley Medical Incorporated | Apparatus and method for performing cystotomy procedures |
| US20090157068A1 (en) | 2007-10-01 | 2009-06-18 | Faouzi Kallel | Intraoperative electrical conduction mapping system |
| US9220398B2 (en) | 2007-10-11 | 2015-12-29 | Intuitive Surgical Operations, Inc. | System for managing Bowden cables in articulating instruments |
| US8523763B2 (en) | 2007-10-16 | 2013-09-03 | Inmotion Medical Ltd. | Lumen probe apparatuses and methods for using the same |
| US20090112063A1 (en) | 2007-10-31 | 2009-04-30 | Bakos Gregory J | Endoscopic overtubes |
| US20100268025A1 (en) | 2007-11-09 | 2010-10-21 | Amir Belson | Apparatus and methods for capsule endoscopy of the esophagus |
| US8663096B2 (en) | 2007-11-13 | 2014-03-04 | Covidien Lp | System and method for rigidizing flexible medical implements |
| US20090131752A1 (en) | 2007-11-19 | 2009-05-21 | Chul Hi Park | Inflatable artificial muscle for elongated instrument |
| US9066655B2 (en) | 2007-12-07 | 2015-06-30 | Ethicon Endo-Surgery, Inc. | Selective stiffening devices and methods |
| WO2009094434A2 (en) | 2008-01-22 | 2009-07-30 | University Of South Florida | Endoscopic overtube |
| ES2334303A1 (es) | 2008-02-04 | 2010-03-08 | Universidad Politecnica De Valencia | Procedimiento y dispositivo de traslacion automatizado de un endoscopio a traves del tubo digestivo. |
| US8246575B2 (en) | 2008-02-26 | 2012-08-21 | Tyco Healthcare Group Lp | Flexible hollow spine with locking feature and manipulation structure |
| JP5424212B2 (ja) | 2008-02-29 | 2014-02-26 | 国立大学法人 東京大学 | 柔剛可変装置 |
| US20090240202A1 (en) | 2008-03-21 | 2009-09-24 | William Joseph Drasler | Expandable introducer sheath |
| US7938809B2 (en) | 2008-04-14 | 2011-05-10 | Merit Medical Systems, Inc. | Quick release hemostasis valve |
| US20090287049A1 (en) | 2008-05-15 | 2009-11-19 | Jones Donald K | Access Systems Including Collapsible Port Body For Intra-Abdominal Surgery |
| US8496648B2 (en) | 2008-05-27 | 2013-07-30 | Intuitive Surgical Operations, Inc. | Stiffening assembly |
| ES2658968T3 (es) | 2008-06-05 | 2018-03-13 | Carnegie Mellon University | Dispositivo de sonda articulado extensible |
| US20100010437A1 (en) * | 2008-07-11 | 2010-01-14 | Miles Robin R | Steerable catheter with distending lumen-actuated curling catheter tip |
| US8123739B2 (en) | 2008-08-19 | 2012-02-28 | Cook Medical Technologies Llc | Drainage catheter and method for catheterizing a patient |
| JP2012501231A (ja) | 2008-08-28 | 2012-01-19 | ジンテス ゲゼルシャフト ミット ベシュレンクテル ハフツング | 骨由来の棘突起間スペーサ |
| JP5297732B2 (ja) | 2008-09-12 | 2013-09-25 | オリンパスメディカルシステムズ株式会社 | 親子式内視鏡 |
| US20100069716A1 (en) | 2008-09-12 | 2010-03-18 | Yem Chin | Flexible guide conduit |
| US8047236B2 (en) | 2008-09-12 | 2011-11-01 | Boston Scientific Scimed, Inc. | Flexible conduit with locking element |
| US20100076451A1 (en) | 2008-09-19 | 2010-03-25 | Ethicon Endo-Surgery, Inc. | Rigidizable surgical instrument |
| US8663196B2 (en) | 2008-09-23 | 2014-03-04 | Kassab Kughn Endovascular Devices Llc | Endovascular sheath with gradable stiffness device and method |
| US20100087711A1 (en) | 2008-10-06 | 2010-04-08 | Gyrus Ent, L.L.C. | Repeatably flexible surgical instrument |
| US8894643B2 (en) | 2008-10-10 | 2014-11-25 | Intuitive Surgical Operations, Inc. | Integral electrode placement and connection systems |
| JP2010136834A (ja) | 2008-12-10 | 2010-06-24 | Fujifilm Corp | 内視鏡軟性部及び内視鏡 |
| US8348834B2 (en) | 2008-12-18 | 2013-01-08 | Ethicon Endo-Surgery, Inc. | Steerable surgical access devices and methods |
| US20100198056A1 (en) * | 2009-01-20 | 2010-08-05 | Mariel Fabro | Diagnostic catheters, guide catheters, visualization devices and chord manipulation devices, and related kits and methods |
| JP2012523855A (ja) | 2009-03-25 | 2012-10-11 | ザ クリーブランド クリニック ファウンデーション | 医用器具シース |
| US20120022329A1 (en) | 2009-04-01 | 2012-01-26 | Wagh Mihir S | Apparatuses for advancing an endoscope through a passage |
| US9254123B2 (en) | 2009-04-29 | 2016-02-09 | Hansen Medical, Inc. | Flexible and steerable elongate instruments with shape control and support elements |
| US8758231B2 (en) | 2009-05-14 | 2014-06-24 | Cook Medical Technologies Llc | Access sheath with active deflection |
| DE102009042490A1 (de) | 2009-05-29 | 2010-12-09 | Aesculap Ag | Steuerungsvorrichtung |
| US8920369B2 (en) | 2009-06-24 | 2014-12-30 | Shifamed Holdings, Llc | Steerable delivery sheaths |
| US10080482B2 (en) | 2009-06-30 | 2018-09-25 | Intuitive Surgical Operations, Inc. | Compliant surgical device |
| US8439970B2 (en) | 2009-07-14 | 2013-05-14 | Edwards Lifesciences Corporation | Transapical delivery system for heart valves |
| WO2011013147A1 (en) | 2009-07-27 | 2011-02-03 | Kemiplast S.R.L. | Method and apparatus for making a composite tape for packaging foodstuffs |
| US20110306950A1 (en) | 2010-06-10 | 2011-12-15 | Cucin Robert L | Coaxially-Driven Tissue Aspiration Instruments |
| DE102009037047A1 (de) | 2009-08-13 | 2011-02-17 | Olympus Winter & Ibe Gmbh | Rohrförmiger Schaft eines chirurgischen Instruments |
| DE102009037046A1 (de) | 2009-08-13 | 2011-02-17 | Olympus Winter & Ibe Gmbh | Rohrförmiger Schaft eines chirurgischen Instruments sowie chirurgisches Instrument |
| JP5448637B2 (ja) | 2009-08-18 | 2014-03-19 | 富士フイルム株式会社 | 挿入経路確保装置 |
| DE102009041510A1 (de) | 2009-09-14 | 2011-03-31 | Richard Wolf Gmbh | Endoskopisches Instrument |
| DE102009049143B3 (de) | 2009-10-12 | 2010-12-30 | Sopro-Comeg Gmbh | Endoskop |
| WO2011047339A2 (en) | 2009-10-15 | 2011-04-21 | Inventio Llc | Disposable and reusable complex shaped see-through endoscope |
| US8241299B2 (en) | 2009-10-22 | 2012-08-14 | Devicor Medical Products, Inc. | Biopsy marker delivery configured to retain marker prior to intended deployment |
| CN101732082B (zh) | 2009-11-06 | 2011-06-22 | 广州宝胆医疗器械科技有限公司 | 软、硬子母胆囊、胆管镜系统 |
| JP2013510668A (ja) | 2009-11-11 | 2013-03-28 | アルファテック スパイン, インコーポレイテッド | ポータルを脊椎に固定する方法およびデバイス |
| US9186131B2 (en) * | 2009-12-16 | 2015-11-17 | Macroplata, Inc. | Multi-lumen-catheter retractor system for a minimally-invasive, operative gastrointestinal treatment |
| JP5852008B2 (ja) | 2009-12-16 | 2016-02-03 | マクロプラタ、インコーポレイテッドMacroplata,Inc. | 消化管病変を内視鏡検査で治療するためのシステム |
| US9565998B2 (en) | 2009-12-16 | 2017-02-14 | Boston Scientific Scimed, Inc. | Multi-lumen-catheter retractor system for a minimally-invasive, operative gastrointestinal treatment |
| US10595711B2 (en) | 2009-12-16 | 2020-03-24 | Boston Scientific Scimed, Inc. | System for a minimally-invasive, operative gastrointestinal treatment |
| CN101797147B (zh) | 2010-01-21 | 2011-09-14 | 广州宝胆医疗器械科技有限公司 | 软硬子母宫腔镜、输卵管镜系统 |
| CN102711985B (zh) | 2010-02-05 | 2016-02-03 | 埃克森美孚化学专利公司 | 脱氢方法 |
| JP5563852B2 (ja) | 2010-03-12 | 2014-07-30 | 富士フイルム株式会社 | バルーン付きオーバーチューブ、および内視鏡システム |
| JP2011194126A (ja) | 2010-03-23 | 2011-10-06 | Fujifilm Corp | 内視鏡若しくは処置具のガイド管 |
| JP2011200356A (ja) | 2010-03-25 | 2011-10-13 | Fujifilm Corp | 内視鏡挿入補助具 |
| JP2011200358A (ja) | 2010-03-25 | 2011-10-13 | Fujifilm Corp | 内視鏡挿入補助具 |
| US20110245611A1 (en) | 2010-03-30 | 2011-10-06 | Chuen-Tai Yeh | Expandable capsule endoscope and expandable capsule endoscopy system |
| JP5054251B2 (ja) | 2010-04-26 | 2012-10-24 | オリンパスメディカルシステムズ株式会社 | 内視鏡 |
| PL2575590T5 (pl) | 2010-05-25 | 2019-04-30 | Arc Medical Design Ltd | Nakładka do medycznego wziernikowego urządzenia |
| WO2011159834A1 (en) | 2010-06-15 | 2011-12-22 | Superdimension, Ltd. | Locatable expandable working channel and method |
| US8672837B2 (en) | 2010-06-24 | 2014-03-18 | Hansen Medical, Inc. | Methods and devices for controlling a shapeable medical device |
| GB2477587A (en) | 2010-07-28 | 2011-08-10 | Architectural Facades And Soffit Systems Ltd | Cladding panels made to resemble tiling |
| US20120029296A1 (en) | 2010-07-29 | 2012-02-02 | KYPHON SARL. A Limited Liability Company | Expandable cannula assemblies for use in percutaneous surgical procedures |
| PL3120781T3 (pl) | 2010-09-30 | 2018-12-31 | Ethicon Llc | Chirurgiczne narzędzie zszywające z wymienialnymi układami wkładów zszywek |
| US9358073B2 (en) | 2010-10-04 | 2016-06-07 | George Piligian | Expandable devices, rail systems, and motorized devices |
| US8968213B2 (en) | 2010-10-19 | 2015-03-03 | United States Endoscopy Group, Inc. | Cytology brush apparatus with improvements |
| US9795771B2 (en) | 2010-10-19 | 2017-10-24 | Warsaw Orthopedic, Inc. | Expandable spinal access instruments and methods of use |
| JP5711380B2 (ja) | 2010-10-22 | 2015-04-30 | メドロボティクス コーポレイション | 多関節のロボティックプローブ |
| CN201899767U (zh) | 2010-11-23 | 2011-07-20 | 天津捷希医疗设备有限公司 | 照明型肛肠内张器 |
| US9211140B2 (en) | 2010-11-24 | 2015-12-15 | Kyphon Sarl | Dynamically expandable cannulae and systems and methods for performing percutaneous surgical procedures employing same |
| TW201223493A (en) | 2010-12-02 | 2012-06-16 | Chung Shan Inst Of Science | Expandable capsule endoscope |
| IT1402844B1 (it) | 2010-12-13 | 2013-09-27 | Scuola Superiore Di Studi Universitari E Di Perfez | Dispositivo robotico a guida magnetica per procedure di endoscopia |
| US20120165792A1 (en) | 2010-12-22 | 2012-06-28 | Ethicon Endo-Surgery, Inc. | Pill Catchers |
| JP5174140B2 (ja) | 2010-12-24 | 2013-04-03 | 富士フイルム株式会社 | 内視鏡挿入補助具 |
| US9283402B2 (en) | 2011-01-03 | 2016-03-15 | Best Medical International, Inc. | Apparatus and method for providing a double balloon breast brachytherapy device |
| US20120179097A1 (en) | 2011-01-06 | 2012-07-12 | Cully Edward H | Methods and apparatus for an adjustable stiffness catheter |
| US10092291B2 (en) | 2011-01-25 | 2018-10-09 | Ethicon Endo-Surgery, Inc. | Surgical instrument with selectively rigidizable features |
| WO2012112967A1 (en) | 2011-02-18 | 2012-08-23 | Guided Delivery Systems Inc. | Systems and methods for variable stiffness tethers |
| WO2012122288A2 (en) | 2011-03-08 | 2012-09-13 | The Johns Hopkins University | Visualization balloon and method of use thereof |
| US9833126B2 (en) | 2011-04-05 | 2017-12-05 | Visualization Balloons, Llc | Balloon access device with features for engaging an endoscope |
| WO2012138815A1 (en) | 2011-04-05 | 2012-10-11 | United States Endoscopy Group, Inc. | Balloon access device for endoscope |
| US20120259177A1 (en) | 2011-04-05 | 2012-10-11 | Warsaw Orthopedic, Inc. | Overlapping Retractor Blade Assemblies |
| US9623206B2 (en) * | 2011-04-29 | 2017-04-18 | Cook Medical Technologies Llc | Catheter having a selectively variable degree of flexibility |
| US20150094656A1 (en) | 2011-05-03 | 2015-04-02 | Amr Salahieh | Steerable medical devices, systems, and methods of use |
| JP5788239B2 (ja) | 2011-06-23 | 2015-09-30 | オリンパス株式会社 | 軌道形成装置 |
| US20130018306A1 (en) | 2011-07-13 | 2013-01-17 | Doron Moshe Ludwin | System for indicating catheter deflection |
| JP6395605B2 (ja) | 2011-09-13 | 2018-09-26 | メドロボティクス コーポレイション | アンチツイストリンク配置を有する高アーティキュレーテッドプローブ、その形成方法及び医療手順実行方法 |
| CN103042777B (zh) | 2011-10-14 | 2016-09-14 | 杜邦公司 | 具有改进的抗冲击强度的复合层合物及其制备方法和用途 |
| US9585546B2 (en) | 2011-11-21 | 2017-03-07 | Cook Medical Technologies Llc | Endoscope stabilization system |
| GB2497544A (en) | 2011-12-13 | 2013-06-19 | Staffordshire University Entpr And Commercial Dev | Travelling capsule with two drive mechanisms |
| US9386916B2 (en) | 2011-12-20 | 2016-07-12 | Life Spine, Inc. | Three-blade spinal retractor |
| JP6449018B2 (ja) | 2011-12-21 | 2019-01-09 | メドロボティクス コーポレイション | アーティキュレーティングプローブを駆動する装置 |
| WO2013109883A1 (en) | 2012-01-20 | 2013-07-25 | The General Hospital Corporation | System, method and apparatus for optical imaging of luminal organs |
| US20140074170A1 (en) | 2012-02-10 | 2014-03-13 | Herbert H. Mertens | Delivery Device With Interior Dilation Element Channel |
| JP6034573B2 (ja) | 2012-02-28 | 2016-11-30 | テルモ株式会社 | 医療器具用可撓管および医療器具 |
| JP2015109887A (ja) | 2012-03-28 | 2015-06-18 | テルモ株式会社 | 医療用処置具 |
| KR101941569B1 (ko) | 2012-03-30 | 2019-04-15 | 삼성전자주식회사 | 가변 유연관 및 이를 갖춘 매니퓰레이터 |
| US9192284B2 (en) | 2012-04-03 | 2015-11-24 | Easynotes Ltd. | Endoscopic accessory for endoscopic device |
| US8777844B1 (en) | 2012-05-08 | 2014-07-15 | Siddharth Sadanand | Modifiable endoscope device |
| US9386910B2 (en) | 2012-07-18 | 2016-07-12 | Apollo Endosurgery, Inc. | Endoscope overtube for insertion through a natural body orifice |
| US9125653B2 (en) | 2012-08-02 | 2015-09-08 | St. Jude Medical, Cardiology Division, Inc. | Flexible nosecone for percutaneous device |
| US9610068B2 (en) | 2012-08-29 | 2017-04-04 | Boston Scientific Scimed, Inc. | Articulation joint with bending member |
| US20140081169A1 (en) | 2012-09-17 | 2014-03-20 | Vanderbilt University | System and method of tetherless insufflation in colon capsule endoscopy |
| US9604339B2 (en) * | 2012-10-29 | 2017-03-28 | Wayne O. Duescher | Vacuum-grooved membrane wafer polishing workholder |
| US10682143B2 (en) | 2012-12-21 | 2020-06-16 | Ircad | Applicators for modular magnetic anastomosis device |
| JP6133594B2 (ja) | 2012-12-27 | 2017-05-24 | 三星電子株式会社Samsung Electronics Co.,Ltd. | 医療用チューブ及び可撓性可変機構 |
| US9526862B2 (en) | 2012-12-27 | 2016-12-27 | Samsung Electronics Co., Ltd | Medical tube and flexibility-variable mechanism with the same |
| US20170055813A1 (en) | 2013-01-16 | 2017-03-02 | Uvision 360, Inc. | Medical device introduction and imaging system, and associated method |
| US10299662B2 (en) | 2013-02-07 | 2019-05-28 | Endoaid Ltd. | Endoscopic sleeve |
| WO2014130563A1 (en) | 2013-02-19 | 2014-08-28 | Beth Israel Deaconess Medical Center | Adjustable stiffness catheter |
| US9474882B2 (en) | 2013-02-26 | 2016-10-25 | Prytime Medical Devices, Inc. | Fluoroscopy-independent balloon guided occlusion catheter and methods |
| US20140276601A1 (en) | 2013-03-13 | 2014-09-18 | DePuy Synthes Products, LLC | Catheter stiffness adjustment system and method |
| US20150369325A1 (en) | 2013-03-15 | 2015-12-24 | Textia Innovative Solutions, S.L. | Element with variable stiffness controlled by negative pressure |
| US10206588B2 (en) | 2013-03-15 | 2019-02-19 | Given Imaging Ltd. | Device and system for sensing within in-vivo fluids |
| CN105377116A (zh) | 2013-05-07 | 2016-03-02 | 杰特普雷普有限公司 | 用于身体通路装置的刚性头部 |
| CN105431074B (zh) | 2013-05-17 | 2017-12-05 | 安万特医疗系统公司 | 次级成像内窥镜装置 |
| EP3007649B1 (en) | 2013-06-12 | 2022-12-28 | The United States of America, as represented by The Secretary, Department of Health and Human Services | Encircling implant delivery systems and methods |
| EP2959823A4 (en) | 2013-06-19 | 2017-06-21 | Olympus Corporation | Endoscope |
| US9675792B2 (en) | 2013-08-05 | 2017-06-13 | Cook Medical Technologies Llc | Hemostasis mechanism and method |
| US20150073216A1 (en) | 2013-09-09 | 2015-03-12 | The Cleveland Clinic Foundation | Endoscope for tissue dissection and visualization |
| US11007026B2 (en) | 2013-10-25 | 2021-05-18 | Intuitive Surgical Operations, Inc. | Flexible instrument with embedded actuation conduits |
| KR101523598B1 (ko) | 2013-11-04 | 2015-05-29 | 최재홍 | 내시경 검사 시 장을 고정하고 단축시키는 기구 및 방법 |
| US9949618B2 (en) | 2013-11-21 | 2018-04-24 | Motus Gi Medical Technologies Ltd. | Apparatus and method for coupling between a colonoscope and add-on tubes |
| WO2015077584A2 (en) | 2013-11-22 | 2015-05-28 | Massachusetts Institute Of Technology | Steering techniques for surgical instruments |
| US20150164314A1 (en) | 2013-12-16 | 2015-06-18 | Medical Instrument Development Laboratories, Inc. | Steerable laser probe |
| US9320508B2 (en) | 2014-02-27 | 2016-04-26 | Gyrus Acmi, Inc. | Expandable medical access sheath |
| US9788856B2 (en) | 2014-03-11 | 2017-10-17 | Stryker European Holdings I, Llc | Endoscopic surgical systems and methods |
| KR101584542B1 (ko) | 2014-05-15 | 2016-01-13 | 주식회사 인트로메딕 | 캡슐 내시경 |
| EP3157446B1 (en) | 2014-06-19 | 2018-08-15 | KB Medical SA | Systems for performing minimally invasive surgery |
| US20160270865A1 (en) | 2014-07-01 | 2016-09-22 | Auris Surgical Robotics, Inc. | Reusable catheter with disposable balloon attachment and tapered tip |
| WO2016006516A1 (ja) | 2014-07-07 | 2016-01-14 | オリンパス株式会社 | ワイヤ保護シースの接続構造、連結部材、ワイヤ保護シース構造体、及びワイヤ保護シースの接続方法 |
| US11540875B2 (en) * | 2014-07-16 | 2023-01-03 | Microcube, Llc | Minimally invasive access channels into bodily regions |
| JP6246936B2 (ja) | 2014-07-28 | 2017-12-13 | 株式会社日立製作所 | X線撮像装置および画像再構成方法 |
| WO2016033403A1 (en) * | 2014-08-29 | 2016-03-03 | Endochoice, Inc. | Systems and methods for varying stiffness of an endoscopic insertion tube |
| CN107072470B (zh) * | 2014-09-02 | 2020-06-05 | 皇家飞利浦有限公司 | 用于光学形状感测的导丝 |
| EP3195784A4 (en) | 2014-09-17 | 2018-07-04 | Olympus Corporation | Bending tube and endoscope device provided with bending tube |
| US10363398B2 (en) | 2014-10-06 | 2019-07-30 | Sanovas Intellectual Property, Llc | Steerable catheter with flexing tip member |
| CN104287684B (zh) | 2014-10-08 | 2016-03-02 | 南京航空航天大学 | 棘爪复位式胶囊內镜机器人驻停及位姿调整装置与方法 |
| WO2016100072A1 (en) | 2014-12-19 | 2016-06-23 | University Hospitals Health System, Inc. | Accessory medical device introduction apparatus for endoscopes |
| CN105759418B (zh) | 2014-12-19 | 2019-06-28 | 深圳市锐丽视科技有限公司 | 挠性数码内窥镜 |
| CN107614048A (zh) | 2015-01-20 | 2018-01-19 | 乔佩尔医疗有限责任公司 | 具有可变支承件的管状结构 |
| WO2016131903A1 (en) | 2015-02-18 | 2016-08-25 | KB Medical SA | Systems and methods for performing minimally invasive spinal surgery with a robotic surgical system using a percutaneous technique |
| US9931026B2 (en) | 2015-03-30 | 2018-04-03 | Acclarent, Inc. | Balloon catheter with image capture and light emission features |
| US9498108B1 (en) | 2015-04-28 | 2016-11-22 | Opportunity/Discovery Llc | Disposable sheath device |
| US10307042B2 (en) | 2015-04-28 | 2019-06-04 | Opportunity/Discovery Llc | Disposable sheath device |
| WO2016190324A1 (ja) | 2015-05-25 | 2016-12-01 | オリンパス株式会社 | 医療用チューブおよび医療用システム |
| US11730345B2 (en) | 2015-06-29 | 2023-08-22 | Gyrus Acmi, Inc. | Sheath for an endoscope |
| US9913570B2 (en) | 2015-08-07 | 2018-03-13 | Enlightenvue Llc | Endoscope with variable profile tip |
| US11219351B2 (en) | 2015-09-03 | 2022-01-11 | Neptune Medical Inc. | Device for endoscopic advancement through the small intestine |
| US10765304B2 (en) | 2015-09-28 | 2020-09-08 | Bio-Medical Engineering (HK) Limited | Endoscopic systems, devices, and methods for performing in vivo procedures |
| US10448805B2 (en) | 2015-09-28 | 2019-10-22 | Bio-Medical Engineering (HK) Limited | Endoscopic systems, devices and methods |
| JP6423539B2 (ja) | 2015-11-20 | 2018-11-14 | オリンパス株式会社 | 内視鏡システム |
| WO2017096362A1 (en) | 2015-12-04 | 2017-06-08 | Barrish Mark D | Lateral articulation anchors for catheters and other uses |
| EP3389757A4 (en) | 2015-12-18 | 2019-08-21 | Inari Medical, Inc. | CATHETERSHIP AND RELATED DEVICES, SYSTEMS AND METHODS |
| US10702305B2 (en) | 2016-03-23 | 2020-07-07 | Coopersurgical, Inc. | Operative cannulas and related methods |
| CN110191667B (zh) | 2016-08-18 | 2022-06-03 | 海王星医疗公司 | 用于增强小肠视觉效果的装置和方法 |
| US10271764B2 (en) | 2016-09-02 | 2019-04-30 | Elwha Llc | Intraluminal devices with deployable elements |
| CN211883715U (zh) | 2016-12-05 | 2020-11-10 | 沙爱尔泽德克科技有限公司 | 内窥镜套箍和内窥镜组件 |
| US20180160893A1 (en) | 2016-12-12 | 2018-06-14 | Meditrina, Inc. | Endoscope and method of use |
| JP7048861B2 (ja) | 2017-03-18 | 2022-04-06 | ボストン サイエンティフィック サイムド,インコーポレイテッド | 体管腔内低侵襲性治療用システム |
| US10751507B2 (en) | 2017-04-10 | 2020-08-25 | Syn Variflex, Llc | Thermally controlled variable-flexibility catheters and methods of manufacturing same |
| CN106943114B (zh) | 2017-04-27 | 2019-01-08 | 泗洪县正心医疗技术有限公司 | 一种末端可扩大的内窥镜 |
| US10926076B2 (en) | 2017-05-09 | 2021-02-23 | Merit Medical Systems, Inc. | Hemostasis torque assembly |
| US20180326144A1 (en) | 2017-05-12 | 2018-11-15 | Meditrina, Inc. | Endoscope system and method of use |
| WO2018213078A1 (en) | 2017-05-17 | 2018-11-22 | Auris Health, Inc. | Exchangeable working channel |
| US20180338673A1 (en) | 2017-05-26 | 2018-11-29 | Covidien Lp | Surgical sheath and surgical apparatus including the same |
| CN107296584B (zh) | 2017-07-07 | 2023-05-09 | 温州市人民医院 | 可操控的新型胶囊内镜 |
| JP7379321B2 (ja) * | 2017-07-20 | 2023-11-14 | ネプチューン メディカル インク. | 動的に剛体化するオーバチューブ |
| NL2019545B1 (en) | 2017-09-14 | 2019-03-27 | Univ Delft Tech | Instrument for minimal invasive surgical operations, comprising a rod or catheter and a tip mounted on the rod or catheter with an elastically deformable element |
| US11432717B2 (en) | 2017-10-11 | 2022-09-06 | Meditrina, Inc. | Endoscope and method of use |
| GB2569177B (en) | 2017-12-08 | 2019-12-04 | Surgerytech Aps | Endoscope system |
| DK3517772T3 (da) | 2018-01-24 | 2021-07-05 | Siemens Gamesa Renewable Energy As | Fleksibelt balsatræpanel, rotorvinge, vindmølle og fremgangsmåde |
| EP3758575B1 (en) | 2018-03-13 | 2024-02-07 | Meditrina, Inc. | Endoscope and method of use |
| DE102018110624A1 (de) | 2018-05-03 | 2019-11-07 | Konstantin Bob | Endoskop mit ausfahrbarem Arbeitskanal |
| WO2019232354A1 (en) | 2018-05-31 | 2019-12-05 | Neptune Medical Inc. | Device and method for enhanced visualization of the small intestine |
| EP3813686A4 (en) | 2018-06-05 | 2022-02-23 | Shaare Zedek Scientific Ltd. | ENDOSCOPE ACCESSORY DEVICES |
| CA3106275A1 (en) | 2018-07-19 | 2020-01-23 | Neptune Medical Inc. | Dynamically rigidizing composite medical structures |
| US11678788B2 (en) | 2018-07-25 | 2023-06-20 | Intuitive Surgical Operations, Inc. | Systems and methods for use of a variable stiffness flexible elongate device |
| US10687698B2 (en) | 2018-09-12 | 2020-06-23 | Enlightenvue Llc | Direct endoluminal- and/or endovascular-illumination systems and methods of use thereof |
| US11998172B2 (en) | 2018-11-07 | 2024-06-04 | Meditrina, Inc. | Endoscope and method of use |
| DE102018133368A1 (de) | 2018-12-21 | 2020-06-25 | Konstantin Bob | Endoskop mit expandierbarem Arbeitskanal |
| AU2020258264A1 (en) | 2019-04-17 | 2021-11-04 | Neptune Medical Inc. | Dynamically rigidizing composite medical structures |
| EP3952721A4 (en) | 2019-04-18 | 2023-01-11 | Meditrina, Inc. | ENDOSCOPE AND METHOD OF USE |
| JP7376612B2 (ja) | 2019-05-24 | 2023-11-08 | ベクトン・ディキンソン・アンド・カンパニー | 関節式補強カニューレ、アクセスセット、およびその方法 |
-
2019
- 2019-07-19 CA CA3106275A patent/CA3106275A1/en active Pending
- 2019-07-19 CN CN201980061388.7A patent/CN112714658A/zh active Pending
- 2019-07-19 JP JP2021502825A patent/JP2021531111A/ja active Pending
- 2019-07-19 AU AU2019307743A patent/AU2019307743A1/en active Pending
- 2019-07-19 WO PCT/US2019/042650 patent/WO2020018934A1/en active Application Filing
- 2019-07-19 EP EP19838653.4A patent/EP3823711A4/en active Pending
-
2021
- 2021-01-19 US US17/152,706 patent/US11135398B2/en active Active
- 2021-10-04 US US17/493,785 patent/US11478608B2/en active Active
-
2022
- 2022-09-02 US US17/902,770 patent/US11724065B2/en active Active
- 2022-09-06 US US17/903,879 patent/US11554248B1/en active Active
-
2023
- 2023-06-28 US US18/343,561 patent/US20230338702A1/en active Pending
-
2024
- 2024-06-21 US US18/751,188 patent/US20240350768A1/en active Pending
- 2024-08-19 US US18/809,322 patent/US20240408351A1/en active Pending
- 2024-08-20 US US18/810,458 patent/US20240408352A1/en active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4425919A (en) * | 1981-07-27 | 1984-01-17 | Raychem Corporation | Torque transmitting catheter apparatus |
| US7438712B2 (en) * | 2003-03-05 | 2008-10-21 | Scimed Life Systems, Inc. | Multi-braid exterior tube |
| US20070270648A1 (en) * | 2006-05-22 | 2007-11-22 | Kms Medical Llc | Torque-transmitting, variably flexible insertion device and method for transmitting torque and variably flexing an insertion device |
| CN102711585A (zh) * | 2009-11-02 | 2012-10-03 | 波士顿科学国际医疗贸易公司 | 具有可改变刚度的柔性内窥镜 |
| CN104168860A (zh) * | 2012-05-09 | 2014-11-26 | 雅培心血管系统有限公司 | 具有液压致动器的导管 |
| US20150216589A1 (en) * | 2014-01-31 | 2015-08-06 | Medtronic Cryocath Lp | Medical device with adjustable flexibility |
Also Published As
| Publication number | Publication date |
|---|---|
| US20230001134A1 (en) | 2023-01-05 |
| EP3823711A4 (en) | 2022-05-18 |
| WO2020018934A8 (en) | 2020-03-26 |
| US20240408352A1 (en) | 2024-12-12 |
| US20240408351A1 (en) | 2024-12-12 |
| US20230001135A1 (en) | 2023-01-05 |
| CA3106275A1 (en) | 2020-01-23 |
| US11135398B2 (en) | 2021-10-05 |
| US20240350768A1 (en) | 2024-10-24 |
| JP2021531111A (ja) | 2021-11-18 |
| US11554248B1 (en) | 2023-01-17 |
| US20210138187A1 (en) | 2021-05-13 |
| US20220023586A1 (en) | 2022-01-27 |
| US20230338702A1 (en) | 2023-10-26 |
| AU2019307743A1 (en) | 2021-01-28 |
| WO2020018934A1 (en) | 2020-01-23 |
| EP3823711A1 (en) | 2021-05-26 |
| US11724065B2 (en) | 2023-08-15 |
| US11478608B2 (en) | 2022-10-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11554248B1 (en) | Rigidizing devices | |
| EP3955982B1 (en) | Dynamically rigidizing composite medical structures | |
| US20230210351A1 (en) | Rigidizing devices | |
| US12193637B2 (en) | External working channels | |
| US20240024640A1 (en) | Dynamically rigidizing guiderail and methods of use | |
| WO2023154743A2 (en) | Dynamically rigidizing composite medical structures | |
| CA3133556A1 (en) | Dynamically rigidizing composite medical structures |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |