CN107505067B - 传感器设备、输入设备和电子装置 - Google Patents
传感器设备、输入设备和电子装置 Download PDFInfo
- Publication number
- CN107505067B CN107505067B CN201710659974.4A CN201710659974A CN107505067B CN 107505067 B CN107505067 B CN 107505067B CN 201710659974 A CN201710659974 A CN 201710659974A CN 107505067 B CN107505067 B CN 107505067B
- Authority
- CN
- China
- Prior art keywords
- electrode
- sensor device
- capacitance
- sensor
- electrodes
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








































Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/044—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means
- G06F3/0445—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means using two or more layers of sensing electrodes, e.g. using two layers of electrodes separated by a dielectric layer
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
- G01L1/14—Measuring force or stress, in general by measuring variations in capacitance or inductance of electrical elements, e.g. by measuring variations of frequency of electrical oscillators
- G01L1/142—Measuring force or stress, in general by measuring variations in capacitance or inductance of electrical elements, e.g. by measuring variations of frequency of electrical oscillators using capacitors
- G01L1/146—Measuring force or stress, in general by measuring variations in capacitance or inductance of electrical elements, e.g. by measuring variations of frequency of electrical oscillators using capacitors for measuring force distributions, e.g. using force arrays
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R27/00—Arrangements for measuring resistance, reactance, impedance, or electric characteristics derived therefrom
- G01R27/02—Measuring real or complex resistance, reactance, impedance, or other two-pole characteristics derived therefrom, e.g. time constant
- G01R27/26—Measuring inductance or capacitance; Measuring quality factor, e.g. by using the resonance method; Measuring loss factor; Measuring dielectric constants ; Measuring impedance or related variables
- G01R27/2605—Measuring capacitance
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/0414—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means using force sensing means to determine a position
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/044—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/044—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means
- G06F3/0446—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means using a grid-like structure of electrodes in at least two directions, e.g. using row and column electrodes
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/044—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means
- G06F3/0447—Position sensing using the local deformation of sensor cells
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/044—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means
- G06F3/0448—Details of the electrode shape, e.g. for enhancing the detection of touches, for generating specific electric field shapes, for enhancing display quality
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2203/00—Indexing scheme relating to G06F3/00 - G06F3/048
- G06F2203/041—Indexing scheme relating to G06F3/041 - G06F3/045
- G06F2203/04102—Flexible digitiser, i.e. constructional details for allowing the whole digitising part of a device to be flexed or rolled like a sheet of paper
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2203/00—Indexing scheme relating to G06F3/00 - G06F3/048
- G06F2203/041—Indexing scheme relating to G06F3/041 - G06F3/045
- G06F2203/04103—Manufacturing, i.e. details related to manufacturing processes specially suited for touch sensitive devices
Abstract
提供一种能够检测小的按压力的传感器设备、一种输入设备和一种电子装置。传感器设备配备有第一表面、第二表面、支撑层以及电容元件。第一表面和第二表面彼此相对。支撑层包含:具有第一高度并部分布置在第一表面和第二表面之间的第一结构;和形成在第一表面和第二表面之间的空间部分。电容元件包含:布置在第一和第二表面的其中一个上的第一电极;以及布置为与第一电极相对的第二电极。电容元件被构造为根据其间介入有空间部分的彼此相对的第一表面和第二表面之间的距离的变化使得产生第一电极和第二电极之间的电容改变。
Description
技术领域
本技术涉及一种包括电容元件的传感器设备,并且涉及一种输入设备和一种电子装置。
背景技术
已知包括电容元件的输入设备作为电子装置的输入设备。例如,专利文献1公开的能够基于电容元件的电容的变化检测操作元件的操作的输入设备。
专利文献1:日本专利申请特开第2011-170659号
发明内容
本发明解决的问题
在专利文献1中描述的输入设备检测与操作元件的操作有关的按压力。因此,如果输入设备可以检测比公众已知的输入设备,诸如在专利文献1中描述的输入设备小的按压力,那么输入设备可以广泛地应用于新的应用。
鉴于如上所述的情况,本技术的目的是提供能够检测小的按压力的传感器设备、输入设备、和电子装置。
解决该问题的方法
根据本技术的实施方式,提供包括第一表面、第二表面、支撑层、和电容元件的传感器设备。
第一表面和第二表面彼此相对。
支撑层包括部分地布置在第一表面和第二表面之间并且具有第一高度的第一结构,和形成在第一表面和第二表面之间的空间部分。
电容元件包括第一电极和第二电极,第一电极被布置在第一表面和第二表面的其中一个上,第二电极被布置为与第一电极相对。电容元件被构造为根据通过空间部分彼此相对的第一表面和第二表面之间的距离的变化产生第一电极和第二电极之间的电容的变化。
利用这个构造,传感器设备可以检测电容元件的小的按压力。
支撑层可以进一步包括布置在空间部分中并且具有比第一高度短的第二高度的第二结构。
利用这个构造,传感器设备可以检测通过第二结构的作用的电容元件的小的按压力。
第二结构形成在第一表面和第二表面中的至少一个上。
利用这个构造,传感器设备可以检测通过第二结构的作用的电容元件的小的按压力。
传感器设备可以进一步包括相对于第二表面的布置在第一表面相对侧并且与第二表面相对的第三表面,和形成在第一表面上的参考电极。在这种情况下,第一电极形成在第二表面上,和第二电极形成在第一表面相对侧上与第二表面相对的第三表面上。
利用这个构造,传感器设备可以检测相互电容系统中的小的按压力。
在传感器设备中,第一电极可以形成在第一表面上,和第二电极可以形成在第二表面上。
利用这个构造,传感器设备可以检测自电容系统中的小的按压力。
在传感器设备中,第一电极和第二电极可以形成在第一表面上。
利用这个构造,传感器设备可以检测自电容系统中的小的按压力。
传感器设备可以进一步包括形成在第一表面上的参考电极,和第一电极和第二电极可以形成在第二表面上。
利用这个构造,传感器设备可以检测相互电容系统中的小的按压力。在传感器设备中,第一结构可以由多个柱状体形成,并且多个柱状体可以有规则地排列。
利用这个构造,在传感器设备中,支撑层可以向第一表面传递统一弹力。
多个柱状体的每个可以形成为具有与第一表面平行的圆形截面和多边形截面的其中一个。
利用这个构造,在传感器设备中,支撑层可以向第一表面传递相同的弹力。
根据本技术的另一实施方式,提供包括基板、导电层、和支撑层的传感器设备。
基板包括多个第一电极、和与多个第一电极相对的多个第二电极。
导电层与多个第一电极相对并且具有柔性。
支撑层包括多个结构和空间部分。多个结构布置在基板和导电层之间并且支撑导电层。
空间部分形成在多个结构之间并且能够部分地改变基板和导电层之间的距离。
基板可以进一步包括设置在多个第一电极和支撑层之间的绝缘层。
多个结构的每个可以排列在多个第一电极和多个第二电极的交叉区域的至少一个部分中。在这种情况下,多个结构的每一个可以由弹性材料形成。
多个结构的每个可以排列在多个第一电极和多个第二电极的交叉区域以外的区域中。替换地,基板可以进一步包括支撑多个第一电极的基底材料,和多个结构的每个可以布置在基底材料上。
支撑层可以进一步包括布置在多个结构和导电层之间并且将多个结构连接至导电层的连接部分。替换地,多个结构的每个可以由连接基板和导电层之间的空隙的连接材料形成。
支撑层可以进一步包括基底部和调节部。基底部支撑多个结构并且与导电层相对,具有空间部分以层状结构介入基底部和导电层。调节部布置在基底部上并且抑制导电层与基底部的接触。
根据本技术的实施方式,提供了包括一个或多个传感器和控制器的输入设备。
一个或多个传感器各自包括第一表面、第二表面、支撑层、和电容元件。
第一表面和第二表面彼此相对。
支撑层包括部分地布置在第一表面和第二表面之间并且具有第一高度的第一结构,和形成在第一表面和第二表面之间的空间部分。
电容元件包括第一电极和第二电极,第一电极被布置在第一表面和第二表面的其中一个上,第二电极被布置为与第一电极相对。电容元件被构造为根据通过空间部分彼此相对的第一表面和第二表面之间的距离的变化产生第一电极和第二电极之间的电容的变化。
控制器包括检测电容的变化的检测单元,和基于检测单元的检测结果产生操作信号的信号产生单元。
利用这个构造,输入设备可以检测电容元件的小的按压力。
一个或多个传感器可以包括多个传感器。在这种情况下,检测单元基于电容元件的电容的变化可以确定操作元件与多个传感器中任一个传感器接触的第一状态,并且从第一状态改变为操作元件按压传感器的第二状态。由此,例如,可以基于电容变化的量是否超过预定阈值彼此区分传感器上进行的触摸操作和推送操作。
多个传感器的每个可以进一步包括相对于第二表面布置在第一表面的相对侧并且与第二表面相对的第三表面,和形成在第一表面上的参考电极。在这种情况下,第一电极形成在第二表面上,并且第二电极形成在第三表面上。利用这个构造,传感器的每个可以检测相互电容系统中的小的按压力。
第一电极可以包括线性电极的集合,和第二电极可以包括平面电极。由此,彼此相对的第一电极和第二电极的区变小,和第一和第二电极的任何一个可以电容耦接至参考电极。
第一电极可以包括排列在第一轴方向上的多个第一配线电极。在这种情况下,第二电极可以包括排列在与第一轴方向交叉的第二轴方向上的多个第二配线电极,和多个传感器的每一个可以包括多个第一配线电极和多个第二配线电极的多个交叉部分。由此,确保单个传感器的检测灵敏度和高线性度性能的输出特性。
多个交叉部分可以在每个区域形成为不同的密度。由此,可以获得期望的输出特性。
多个传感器的每一个可以包括多个传感器,每个均具有通过电容元件检测电容的不同的灵敏度。
根据本技术的实施方式,提供了包括一个或多个传感器、控制器和输入操作单元的电子装置。
一个或多个传感器各自包括第一表面、第二表面、支撑层、和电容元件。
第一表面和第二表面彼此相对。
支撑层包括部分地布置在第一表面和第二表面之间并且具有第一高度的第一结构,和形成在第一表面和第二表面之间的空间部分。
电容元件包括第一电极和第二电极,第一电极被布置在第一表面和第二表面的其中一个上,第二电极被布置为与第一电极相对。电容元件被构造为根据通过空间部分彼此相对的第一表面和第二表面之间的距离的变化产生第一电极和第二电极之间的电容的变化。
控制器包括检测电容的变化的检测单元,和基于检测单元的检测结果产生操作信号的信号产生单元。
输入操作单元布置在电容元件的第一表侧面上。
利用这个构造,电子装置可以检测电容元件的施加至输入操作单元的小的按压力。
输入操作单元可以是基于操作信号显示图像的柔性显示器。由此,可以提高输入可操作性。
本发明的效果
如上所述,根据本技术,可以提供能够检测小的按压力的传感器设备、输入设备、和电子装置。
附图说明
图1是根据本技术的第一实施方式的输入设备的平面图。
图2是沿着图1的线A-A’截取的输入设备的截面图。
图3是根据本技术的第一实施方式的电子装置的框图。
图4是示出在图1中示出的输入设备的电极构造的平面图。
图5是示出在图1中示出的输入设备的输出信号的示例的示图。
图6是第一模拟的说明性的示图。
图7是第二模拟的说明性的示图。
图8是第二模拟的说明性的示图。
图9是示出在图1中示出的第一结构的改进的示例的示图。
图10是示出在图1中示出的第一结构的改进的示例的示图。
图11是示出在图1中示出的第一结构的改进的示例的示图。
图12是第三模拟的说明性的示图。
图13是第四模拟的说明性的示图。
图14是示出形成在图1中示出的第一结构和第二结构的方法的示例的示图。
图15是示出在图1中示出的支撑层的改进的示例的示图。
图16是根据本技术的第二实施方式的输入设备的截面图。
图17是根据本技术的第三实施方式的输入设备的截面图。
图18是根据本技术的第四实施方式的输入设备的截面图。
图19是示出根据本技术的第五实施方式的输入设备的构造的框图。
图20是输入设备的主要部分的片段的截面图。
图21是描述传感器矩阵的特征示例的示意图,其中,二维地排列多个传感器。
图22是示意性地示出传感器矩阵的电极的构造示例的片段的平面图。
图23是示出电极的一些配置示例的示意图。
图24是示意性地示出传感器矩阵的电极的另一个构造示例的片段的平面图。
图25是电极的构造示例的部分地放大图。
图26是示意性地示出传感器矩阵的电极的再另一个构造示例的片段的平面图。
图27是根据本技术的第六实施方式的输入设备的截面图。
图28是根据图27的变形例的输入设备的截面图。
图29是根据图27的变形例的输入设备的截面图。
图30是根据图29的变形例的输入设备的截面图。
图31是根据图29的变形例的输入设备的截面图。
图32是根据图27的变形例的输入设备的截面图。
图33是图32的输入设备的主要部分的分解立体图。
图34是根据图27的变形例的输入设备的截面图。
图35是根据本技术的第七实施方式的输入设备的截面图。
图36是在图35中示出的输入设备的柔性键盘的平面图。
图37是在图35中示出的输入设备的支撑层的平面图。
图38是在图35中示出的输入设备的基板的平面图。
图39是沿着图38的线B-B'的方向截取的输入设备的截面图。
图40是用于描述在图35中示出的输入设备的作用的主要部分的截面图。
图41是用于描述在图27中示出的输入设备的作用的主要部分的截面图。
具体实施方式
在下文中,将参考附图描述本技术的实施方式。附图示出彼此正交的X轴、Y轴、和Z轴。这些轴在以下实施方式中是共用的。
<第一实施方式>
(总体构造)
图1是根据本技术的第一实施方式的输入设备1的平面图。图2是沿着图1的线A-A’截取的输入设备1的截面图。图3是使用输入设备1的电子装置的框图。
输入设备1包括柔性显示器10和传感器设备11。在图1中,省去柔性显示器10并且传感器设备11的内部结构被示意性地示出。输入设备1和柔性显示器10的每一个均具有沿垂直于Z轴的方向延伸的板状形状。
柔性显示器10具有在输入设备1中作为输入操作单元的功能和在电子装置z中作为显示单元的功能。换言之,柔性显示器10在上(前)表面Z轴方向上接收用户的操作以便用作输入设备1的输入操作单元,并且还在Z轴方向上向上显示对应于用户的操作的图像以便用作电子装置z的显示单元。操作元件在柔性显示器10上进行操作的示例包括在图2中的(B)中示出的手指f和在图2中的(C)中示出的触控笔s。
作为柔性显示器10,可以使用通常可利用的显示器。此类通常可利用的显示器的示例包括所谓的电子纸、有机EL(电致发光)面板、无机EL面板、和液晶面板。
传感器设备11被布置在柔性显示器10的Z轴方向上的下(背)表面上。此外,传感器设备11包括包含X电极12和Y电极13的基板11b。X电极12和Y电极13组成相互电容系统的电容元件。此外,传感器设备11包括参考电极14,并且由于参考电极14与基板11b接近,X电极12和Y电极13之间的电容变化。通常,参考电极14被连接至地电位。
输入设备1包括控制器c,并且控制器c包括确定单元c1(检测单元)和信号产生单元c2。确定单元c1基于传感器设备11的(X电极12和Y电极13之间的)电容变化检测用户的操作。信号产生单元c2基于确定单元c1的检测结果产生操作信号。
在图3中示出的电子装置z包括基于输入设备1的信号产生单元c2产生的操作信号进行处理的处理设备p。处理设备p处理的操作信号被作为例如,图像信号输出至柔性显示器10(输入操作单元)。
(传感器设备)
基板11b由多个基底材料的层压件组成,多个基底材料包括X电极12形成在其上的基底材料和Y电极13形成在其上的基底材料。在这个实施方式中,因为输入设备1本身在厚度方向上是可变形的,所以可变形的基板被用作基板11b。形成基底材料的材料的示例包括由PET(聚对苯二甲酸乙二酯)、PEN(聚萘二甲酸乙二醇酯)、PI(聚酰亚胺)、PC(聚碳酸酯)、等制成的半透明的或者非半透明的树脂材料。
应注意,在输入设备1本身是不可变形的情况下,基板11b是不可变形的。在这种情况下,作为形成基底材料的材料,例如,可以使用诸如陶瓷材料的硬质材料。
这里,仅关注电极12、13和14。X电极12、Y电极13、和参考电极14形成在与Z轴正交并且彼此不同的相应的三个表面上。具体地,X电极12形成基板11b在Z轴方向上的上表面上,Y电极13形成在基板11b中,并且参考电极14形成在柔性显示器10在Z轴方向上的下表面上。这样,这些电极组在Z轴方向上按照从顶部到底部为参考电极14、X电极12、和Y电极13的顺序排列。
如上所述,在传感器设备11中,X电极12和Y电极13组成电容元件,并且检测X电极12和Y电极13之间的电容变化。另一方面,彼此相对的X电极12和参考电极14也组成电容元件。当参考电极14接近基板11b时,X电极12和参考电极14之间的电容增加,并且X电极12和Y电极13之间的电容减小。以这种方式,在传感器设备11中,可以基于X电极12和Y电极13之间的电容的减小检测参考电极14的接近。
应注意,在这个实施方式中,参考电极14形成在柔性显示器10在Z轴方向上的下表面上。在传感器设备11中,然而,参考电极14仅需要布置在Z轴方向上与X电极12向上相对的位置。因此,不同于柔性显示器10,参考电极14可以独立地形成或者可以形成在弹性可变形的基板中。
传感器设备11包括布置在基板11b和参考电极14之间的多个第一结构15。每个第一结构15是具有顶部被与底表面平行的表面切断的圆锥形状的柱状体,并且具有在Z轴方向上延伸的中轴。多个第一结构15有规则(相等间隔)地布置在X轴方向上和Y轴方向上。第一结构15均由弹性可变形材料形成。此类材料的示例包括PET、硅树脂、和多孔材料。第一结构15在Z轴方向上的上表面和参考电极14在Z轴方向上的下表面通过粘合层18粘结。粘合层18由例如,UV(紫外线)光固化树脂材料形成。应注意,第一结构15在Z轴方向上的上表面和参考电极14在Z轴方向上的下表面可以无需粘合层18彼此直接接触。
每个第一结构15具有在参考电极14远离基板11b的状态中支撑参考电极14的作为支撑件的功能。换言之,第一结构15形成基板11b和参考电极14之间的空间部分17。利用这个,包含第一结构15和空间部分17的支撑层11a形成在基板11b和参考电极14之间。
第二结构16形成在基板11b在Z轴方向上的上表面上的第一结构15之间。如图1所示,每个第二结构16具有与Z轴正交的方形截面和布置在X电极12和Y电极13彼此交叉的每个位置。此外,如图2中所示,第二结构16的高度低于第一结构15(或者支撑层11a)的高度。为此,空间部分17形成在第二结构16和参考电极14之间。
图2中的(B)示出柔性显示器10接收用户的手指f的操作的状态。在这个状态中,手指f在Z轴方向上向下在柔性显示器10上施加力。这时,柔性显示器10在Z轴方向上向下偏斜。粘结至柔性显示器10的参考电极14与柔性显示器10一起在Z轴方向上向下偏斜并且接近基板11b。由此,传感器设备11的电容减小。
如上所述,第二结构16形成在参考电极14和基板11b之间。因为形成第二结构16的材料具有高于存在于空间部分17中的空气的具体的介电常数,所以与没有第二结构16的结构相比较,X电极12和参考电极14之间的电容较大。随着X电极12和参考电极14之间的电容变大,与参考电极14至X电极12侧的位移有关的X电极12和参考电极14之间的电容变化变大。
另一方面,随着X电极12和参考电极14之间的电容变化变大,X电极12和Y电极13之间的电容变化也变得较大。因此,在传感器设备11中,由于第二结构16的作用,与参考电极14至X电极12侧的位移有关的X电极12和Y电极13之间的电容变化变得较大。为此,在传感器设备11中,也在参考电极14至X电极12侧面的位移小的情况下,可以检测到位移。换言之,传感器设备11具有检测与用户在柔性显示器10上的操作有关的按压力的高灵敏度。
如图2中的(B)所示,与手指f按压的柔性显示器10的向下的弯曲相关联,柔性显示器10下面的第一结构15弹性地变形。为此,当手指f移动远离柔性显示器10时,柔性显示器10和参考电极14被第一结构15的弹性恢复力向上推进,并且输入设备1返回至在图2中的(A)中示出的状态。
图2中的(C)示出柔性显示器10接收触控笔s的操作的状态。如在图2中的(B)中示出的操作元件是手指f的情形下,这也适用于操作元件是触控笔s的情形。形成触控笔s的材料可以是足够硬以便能够按压柔性显示器10的材料。此类材料的示例包括金属材料和诸如塑料的树脂材料。
(传感器设备的电极的构造)
图4是从Z轴方向上方观察的传感器设备11的平面图,示出仅电极12和Y电极13在传感器设备11中。X电极12和Y电极13均由排列为彼此平行的多个配线电极组成并且形成所谓的交叉矩阵。传感器设备11包括在其Y轴方向上的整个范围内延伸的n列X电极12和在其X轴方向上的整个范围内延伸的m列Y电极13。X电极12被排列为在输入设备1的X轴方向上的整个范围内,并且Y轴电极被排列在输入设备1的Y轴方向上的整个范围内。
在传感器设备11中,在图2中示出的电容元件形成在X电极12和Y电极13彼此交叉的相应的位置处。因此,传感器设备11包括n×m个电容元件50。在传感器设备11中,因为n和m的较大的值在XY平面上提供电容元件的高密度,所以可以更加准确地检测操作位置。
(控制器)
控制器c通常由CPU(中央处理器)或者MPU(微处理单元)组成。在这个实施方式中,控制器c包括确定单元c1和信号产生单元c2并且根据存储在图中的存储单元(未示出)中的程序执行各种功能。确定单元c1基于从传感器设备11输出的电信号(输入信号)确定柔性显示器10的状态。信号产生单元c2基于确定结果产生操作信号。
此外,控制器c包括用于驱动输入设备1的驱动电路。驱动电路在预定时间间隔输出驱动信号至每个电容元件50。此外,确定单元c1处理来自每个电容元件50的驱动信号的输出并且确定用户在输入设备1上的输入操作。
图5是示出当柔性显示器10接收用户的手指f的操作时从传感器设备11输出的输出信号的示例的示图。沿着图5的X轴示出的柱状图表示由每个X电极12形成的任何电容元件中的参考电容的电容变化量。此外,沿着图5的Y轴示出的柱状图表示由每个Y电极13形成的任何电容元件中的参考电容的电容变化量。
在图3中示出的控制器c的确定单元c1基于从X电极12和Y电极13获得电容变化的量计算手指f在柔性显示器10上的操作位置的X轴方向上的和Y轴方向上的坐标。具体地,在图5中,确定单元c1基于由X电极12(X1、X2、X3、X4)形成的传感器设备11中的电容变化的量的比例计算手指f的操作位置的X坐标,并且基于由Y电极13(Y1、Y2、Y3、Y4)形成的传感器设备11中的电容变化的量的比例计算手指f的操作位置的Y坐标。利用这个,确定单元c1输出柔性显示器10中的操作位置的坐标至信号产生单元c2(参见图3)。
确定单元c1可以使用由相应的X电极12或者Y电极13形成的电容元件中的电容变化的量的最大值作为关于柔性显示器10是否接收操作的评估值。
此外,确定单元c1可以作为关于柔性显示器10是否接收操作的评估值使用由相应的X电极12形成的电容元件中的电容变化的量的组合值(组合值是沿着图5的X轴示出的柱状图的值的组合值并且以下简称X组合值)。此外,取代X组合值,可以使用由相应的Y电极13形成的电容元件中的电容变化的量的组合值(组合值是沿着图5的Y轴示出的柱状图的值的组合值并且以下简称Y组合值)。此外,取代X组合值或者Y组合值,可以使用通过进一步使X组合值和Y组合值相加获得的值。
具体地,为确定单元c1设定阈值。在评估值是阈值或者较大的情况下,确定单元c1确定柔性显示器10接收操作。确定单元c1输出确定的结果至信号产生单元c2(参见图3)。信号产生单元c2根据来自确定单元c1的输出信号产生操作信号。
确定单元c1可以设定任何值作为阈值。例如,确定单元c1可以为诸如具有微弱的手指力的妇女和儿童设定低阈值或者为具有强大的手指力的用户设定高阈值。
以这种方式,在根据这个实施方式的输入设备1中,可以准确地确定柔性显示器10接收操作的位置。
(支撑层的结构)
在这个实施方式中,如上所述,参考电极14和柔性显示器10通过支撑层11a由基板11b支撑。支撑层11a具有参考电极14和柔性显示器10在基板11b上仅通过图1和2中示出的多个第一结构15支撑的构造。在这个实施方式中,利用支撑层11a的构造,在用户通过小的按压力进行操作的情况下也可以获取参考电极14和柔性显示器10在Z轴方向上向下的足够的位移。
在下文中,将描述为了研究支撑层11a的构造进行的模拟。
(1)第一模拟图6中的(A)是第一模拟的示意性的构造示图。与根据这个实施方式的支撑层11a不同,该模拟在支撑层用单种材料充满的假定之下进行。
在这个模拟中,如图6中的(A)所示,使用由具有与根据这个实施方式的柔性显示器10的杨氏模量E相同的杨氏模量E的薄片110组成的模型、填充有变化的杨氏模量E的单种材料的支撑层111a、和由足够硬的材料形成的基底材料b。薄片110的厚度T被设为300[μm]、500[μm]、和800[μm],并且支撑层111a的Z轴方向上的下表面受基底材料b的限制。
在图6中的(A)中示出的模型,假定薄片110接收小的按压力的操作,在薄片110被使用具有3[mm]的直径的圆柱形的按压元件p的恒力(0.25[N])按压的条件下进行计算。
图6中的(B)示出计算薄片110的下表面在Z轴方向上的位移d的结果。在图6中的(B)中,水平轴表示填充支撑层111a的材料的杨氏模量E,纵轴表示薄片110的下表面在Z轴方向上的位移d。
这个模拟的结果显示随着填充支撑层111a的材料的杨氏模量E变低的较大的位移d,和随着薄片110的厚度T变薄的较大的位移的趋势。
薄片110的厚度T实际上是基于电子装置的设计来确定。特别地,在如在这个实施方式中的采用柔性显示器10作为薄片110的情况下,在一些情况下,技术上难以减小厚度T。因此,为了充分增加薄片110的下表面在Z轴方向上的位移d,需要使用具有足够小的杨氏模量E的材料作为填充支撑层111a的材料。
在这个实施方式中,当薄片110在Z轴方向上的下表面在图2中的(B)和图2中的(C)中示出的用户的操作上具有1[μm]或者更大的位移时,可以充分检测传感器设备11中的电容变化。此外,根据这个实施方式的柔性显示器10具有800[μm]的厚度。
因此,在这个实施方式中,在T=800[μm]的条件下,薄片110在Z轴方向上的下表面具有1[μm]或者更大的位移d是理想的。为此,填充支撑层111a的材料的杨氏模量E为0.1[MPa]或者更小是必要的。
然而,通常使用的硅树脂的杨氏模量E约几十至数百[MPa]。具有低杨氏模量E的多孔材料的杨氏模量E保持约1至10[MPa]。此外,利用形成为更多地减小杨氏模量E的特殊的多孔材料,难以减小杨氏模量E至0.1[MPa]或者更小。
以这种方式,因为可以期望用于单种材料的杨氏模量E具有限制,在这个实施方式中发现,在支撑层11a填充单种材料的构造中没有获得与用户的操作有关的足够的位移d。
(2)第二模拟图7中的(A)和8(A)是第二模拟的示意性的构造示图。在这个模拟中,与如支撑层111a填充单种材料的第一模拟中的构造不同,研究了以一定间隔布置在支撑层111a的X轴方向和Y轴方向上的圆柱形的第一结构115。在这个构造中,在支撑层111a中,第一结构115和空间部分117在X轴方向和Y轴方向上交替地排列。
首先,如图7中的(A)中所示,随着第一结构115的直径 被设为100[μm],针对形成第一结构115的材料的杨氏模量E和第一结构115的间隔L改变的以下四个模型进行计算。
被设为100[μm],针对形成第一结构115的材料的杨氏模量E和第一结构115的间隔L改变的以下四个模型进行计算。
模型a:E=2[GPa]、L=1[mm]
模型b:E=2[GPa]、L=2[mm]
模型c:E=100[MPa]、L=1[mm]
模型d:E=100[MPa]、L=2[mm]
在每个模型中,如在第一模拟中,在使用具有3[mm]的直径的圆柱形按压元件p通过恒力(0.25[N])按压薄片110的条件下进行计算。
图7中的(B)示出薄片110在Z轴方向上的下表面的位移d的计算结果。在图7中的(B)中,水平轴表示模型名称,和垂直轴表示薄片110在Z轴方向上的下表面的位移d。
这个模拟的结果示出薄片110随着第一结构115的杨氏模量E变低并且随着第一结构115之间的间隔变得较大在Z轴方向上的下表面的大的位移d的趋势。
在这个模拟中,获得形成第一结构115的材料的杨氏模量E的幅度的大位移d。这个起因于薄片110由第一模拟中的支撑层111a的整个支撑的事实,虽然薄片110仅通过这个模拟中的支撑层111a的具有第一结构115的部分被支撑。
换言之,在这个模拟中,支撑层111a中的薄片110的支撑区减小并且由此支撑层111a在Z轴方向上的硬度(在下文中,称作“明显的杨氏模量E'”)减小。因此,获得大位移d。
因此,为了减小支撑层111a的明显的杨氏模量E',减小支撑层111a中的薄片110的支撑区域的方法是有效的。作为此类方法,想到减小第一结构115的直径 的方法和增加第一结构115之间的间隔L的方法。然而,当第一结构115之间的间隔L过于大时,存在支撑层111a不能适当地支撑薄片110的可能性。因此,研究减小第一结构115的直径
的方法和增加第一结构115之间的间隔L的方法。然而,当第一结构115之间的间隔L过于大时,存在支撑层111a不能适当地支撑薄片110的可能性。因此,研究减小第一结构115的直径 的方法。
的方法。
如图8中的(A)中所示,随着第一结构115的直径 从100[μm]减小为50[μm],针对第一结构115的杨氏模量E和第一结构115的间隔L改变的以下四个模型进行计算。
从100[μm]减小为50[μm],针对第一结构115的杨氏模量E和第一结构115的间隔L改变的以下四个模型进行计算。
模型a:E=2[GPa]、L=1[mm]
模型b:E=2[GPa]、L=2[mm]
模型c:E=100[MPa]、L=1[mm]
模型d:E=100[MPa]、L=2[mm]
在每个模型中,如在第一模拟中,在假定使用具有3[mm]的直径的圆柱形按压元件p通过恒力(0.25[N])按压薄片110的情形下进行计算。
图8中的(B)示出薄片110在Z轴方向上的下表面的位移d的计算结果。在图8中的(B)中,水平轴表示模型名称,和垂直轴表示薄片110在Z轴方向上的下表面的位移d。每个模型中的薄片110在Z轴方向上的下表面的位移d的值变得大于横穿条板的第一模拟。特别地,在模型d(E=100[MPa]、L=2[mm])中,位移d超过1[μm],并且支撑层111a的明显的杨氏模量E'是0.1[MPa]或者更小。
第一模拟和第二模拟引起参考电极14和柔性显示器10仅由根据这个实施方式的支撑层11a中的第一结构15支撑的构造。
(第一结构)
第一结构15可以具有除了在图2中示出的形状和上述模拟中示出的圆柱形之外的任何形状。例如,第一结构15可以具有含有在图9中的(A)中示出的Z轴方向上的阶梯的形状、具有在图9中的(B)中示出的穹顶上部分的形状、或者具有在图9中的(C)中示出的在上端上的凹槽15a的形状。在这种情况下,与具有圆柱形的结构相比较,Z轴方向上的压缩变形的量可以增加,具有大的曲度的穹顶形状可以提供大的变形量。此外,第一结构15的形状可能不具有如在气缸(圆锥)情况下的与Z轴正交的圆形截面。第一结构15的形状可能具有与Z轴正交的多边形的截面或者可能具有例如,四角柱(正方锥)或者三角柱(三棱锥)的截面。
此外,第一结构15在XY平面上的布置可能不具有如图10中的(A)中所示的横穿整个表面的统一的构造。例如,第一结构15的布置可能具有如图10中的(B)中所示的仅外缘部分具有高密度的构造,或者可能具有如图10中的(C)中所示的在某个区域中没有任何布置的构造。此外,第一结构15可以如图10中的(D)中所示的在大小上彼此不同。
此外,第一结构15可以不是圆筒形的并且可以是,例如,壁状的。壁状的第一结构15的示例包括在图11中的(A)中示出的栅格状的第一结构15、在图11中的(B)中示出的具有不同直径的矩形的组合、和在图11中的(C)中示出的放射状的第一结构15。
(第二结构)
如上所述,第二结构16通过增加X电极12和参考电极14之间的电容来增加与参考电极14至X电极12侧的位移有关的X电极12和Y电极13之间的电容变化。
在下文中,将描述为了研究第二结构16的构造进行的模拟。
(3)第三模拟
图12中的(A)是第三模拟的示意性的构造示图。在这个模拟中,研究第二结构116在Z轴方向上的厚度。为了模拟,使用在图12中的(A)中示出与在这个实施方式中相同的模型。模型由薄片110、支撑层111a、和基板111b组成。如在根据这个实施方式的输入设备1中,基板111b包括X电极112和Y电极113,和参考电极114形成在薄片110的Z轴方向上的下表面上。
第一结构115被布置在支撑层111a中使得在基板111b和参考电极114之间形成在Z轴方向上具有间隔H的空间部分117。假定第二结构116被布置在X电极112和Y电极113彼此交叉的位置,和在第二结构116的形状中,与Z轴正交的截面是正方形和Z轴方向上的高度是H1。
在图12中的(A)中示出的模型中,在使用具有5[mm]的直径的圆柱形的按压元件p按压薄片110的条件下进行计算,薄片110在Z轴方向上的下表面在Z轴方向上向下位移3[μm]。H的值被设为30[μm]和50[μm]。X电极112和Y电极113之间的起始电容的幅度被设为3[pF]。
图12中的(B)是示出基于H1的幅度在使用按压元件P按压薄片110的前后的电容的变化值ΔC中的变化的曲线图。利用H=30[μm]和H=50[μm],发现随着第二结构116的厚度H1的值变大,电容的变化值ΔC变大。
通过该模拟,发现随着根据这个实施方式的第二结构16变厚,电容变化较大并且因此传感器设备11的灵敏性变高。
(4)第四模拟
图13中的(A)是第四模拟的示意性的构造示图。在这个模拟中,在图13中的(A)中示出的模拟模型用于研究第二结构116在X轴方向和Y轴方向上的宽度。支撑层111a的厚度H被设为50[μm],和第二结构116的厚度H1被设为30[μm]。第二结构116从X电极112的外面宽度被设为L1。
图13中的(B)是示出基于H1的幅度在使用按压元件P按压薄片110的前后的电容的变化值ΔC中的变化的曲线图。发现当第二结构116从X电极112的外面长度L1是300或者较大时,获得电容的足够的变化值ΔC。
应注意,第二结构16仅需要形成在支撑层11a中,并且其形状不受限制。在这个实施方式中,第二结构16具有与Z轴的正交的截面是正方形的形状,但是可能具有与Z轴的正交的截面是例如,圆形或者任何多边形的形状。此外,第二结构16的外面形状的一部分或者所有可以由弯曲表面形成。
(形成第一结构和第二结构的方法)
图14是示出形成根据这个实施方式的输入设备1的第一结构15和第二结构16的方法的示图。首先,如在图14中的(A)中示出的,UV树脂R布置在半透明的基板11b上。作为树脂R,可以使用实心板材料或者液体UV光固化材料。如图14中的(B)中所示,使用具有预定的凹凸形图案的辊锻模M,辊锻模M的凹凸形图案转移在UV树脂R上,并且从基底材料11b侧面应用UV以便硬化UV树脂R。以这种方式,如图14中的(C)中所示,第一结构15和第二结构16形成在基板11b上。应注意,除使用上述UV树脂形成之外,第一结构15和第二结构16可以通过例如,一般的热成型(例如,压制成形或者注塑)或者使用分配器等排出树脂材料形成。
(支撑层的构造的变形例)
图15示出根据这个实施方式的支撑层11a的变形例。支撑层11a可能具有如图15中的(A)中所示的各自在Z轴方向上具有穹顶的、弯曲上表面的第二结构16,或者第二结构16可以由不同于如图15中的(B)中所示的第一结构15的材料形成。
此外,在支撑层11a中,如图15中的(C)中所示,粘合层18可以被引起向下突出以便在Z轴方向上的上侧上设置第二结构18B,与在Z轴方向上的下侧上的第二结构16分离。在这种情况下,如在第二结构16的情况下,第二结构18b增加X电极12和参考电极14之间的电容。支撑层11a仅需要设置有结构16和结构18b中的任一种。应注意,结构16和结构18b两者可以根据需要省去。
此外,在支撑层11a中,第一结构15和第二结构16可以如图15中的(D)所示连续地形成,可以如图15中的(E)所示在第二结构16Z轴方向上的上表面上形成梯阶,并且如图15中的(F)中所示的,每个第二结构16的高度不同。
<第二实施方式>
图16是根据本技术的第二实施方式的输入设备2的片段的截面图。除了根据这个实施方式的输入设备2的传感器设备21,该构造与第一实施方式的构造相同,并且将酌情省去其描述。图16对应于根据第一实施方式的图2。
(总体构造)
根据这个实施方式的输入设备2包括不同于第一实施方式的传感器设备21,和与第一实施方式的相同的柔性显示器10。传感器设备21包括彼此相对的X电极22和Y电极23。X电极22和Y电极23组成自电容系统的电容元件。此外,由于X电极22至Y电极23的接近,在传感器设备21中,X电极22和Y电极23之间的电容增加。
(传感器设备)
Y电极23形成在基板21b在Z轴方向上的上表面上。在另一方面,X电极22形成在柔性显示器10在Z轴方向上的下表面上。在传感器设备21中,可以基于X电极22和Y电极23之间的电容的减少检测X电极22与Y电极23的接近。
传感器设备21包括布置在基板21b和柔性显示器10之间的多个第一结构25。第一结构25具有与根据第一实施方式的第一结构15相同的构造。第一结构25在Z轴方向上的上表面和柔性显示器10在Z轴方向上的下表面通过粘合层28粘结。利用这个,包含第一结构25和空间部分27的支撑层21a形成在基板21b和柔性显示器10之间。
第二结构26形成在基板21b在Z轴方向上的上表面上的第一结构25之间。第二结构26具有与根据第一实施方式的第二结构16相同的构造。
图16中的(B)示出柔性显示器10接收用户的手指f的操作的状态。在这个状态中,手指f在Z轴方向上的柔性显示器10上向下施加力。这时,柔性显示器10在Z轴方向上向下偏斜。粘结至柔性显示器10的X电极22与柔性显示器10一起在Z轴方向上向下偏斜并且接近基板21b。由此,传感器设备21的电容增加。
如上所述,第二结构26形成在柔性显示器10和基板21b之间。因为形成第二结构26的材料具有高于存在于空间部分27中的空气的具体的介电常数,所以与没有第二结构26的结构相比较,X电极22和Y电极23之间的电容较大。因此,在传感器设备21中,也在X电极22至Y电极23侧面的位移小的的情况下,可以检测到位移。换言之,传感器设备21具有检测与用户在柔性显示器10上的操作有关的按压力的高灵敏度。
图16中的(C)示出柔性显示器10接收触控笔s的操作的状态。如在图16中的(B)中示出操作元件是手指f的情形下,这也适用于操作元件是触控笔s的情形。
<第三实施方式>
图17是根据本技术的第三实施方式的输入设备3的片段的截面图。除了根据这个实施方式的输入设备3的传感器设备31,该构造与第一实施方式的构造相同,并且将酌情省去其描述。图17对应于根据第一实施方式的图2。
(总体构造)
根据这个实施方式的输入设备3包括不同于第一实施方式的传感器设备的传感器设备31,和与第一实施方式的柔性显示器相同的柔性显示器10。传感器设备31包括包含第一电极32和第二电极33的基板31b。第一电极32和第二电极33组成相互电容系统的电容元件。此外,传感器设备31包括参考电极34,并且由于参考电极34与基板31b的接近,第一电极32和第二电极33之间的电容减小。通常,参考电极34连接至地电位。
(传感器设备)
沿着X轴并排地布置的第一电极32和第二电极33形成在基板31b在Z轴方向上的上表面上。参考电极34形成在柔性显示器10在Z轴方向上的下表面上。在传感器设备31中,可以基于第一电极32和第二电极33之间的电容的减小检测参考电极34与基板31b的接近。
传感器设备31包括布置在基板31b和参考电极34之间的多个第一结构35。第一结构35具有与根据第一实施方式的第一结构15相同的构造。第一结构35在Z轴方向上的上表面和参考电极34在Z轴方向上的下表面通过粘合层38粘结。利用这个,包含第一结构35和空间部分37的支撑层31a形成在基板31b和柔性显示器10之间。
第二结构36形成在基板31b的Z轴方向上的上表面上的第一结构35之间。第二结构36具有与根据第一实施方式的第二结构16相同的构造。
图17中的(B)示出柔性显示器10接收用户的手指f的操作的状态。在这个状态中,手指f在Z轴方向上向下在柔性显示器10上施加力。这时,柔性显示器10在Z轴方向上向下偏斜。粘结至柔性显示器10的参考电极34与柔性显示器10一起在Z轴方向上向下偏斜并且接近基板31b。由此,传感器设备31的电容减小。
如上所述,第二结构36形成在参考电极34和基板31b之间。因为形成第二结构36的材料具有高于存在于空间部分37中的空气的具体的介电常数,所以与没有第二结构36的结构相比较,第一电极32和第二电极33之间的电容较大。因此,在传感器设备31中,也在第一电极32至第二电极33侧面的位移小的情况下,可以检测到位移。换言之,传感器设备31具有检测与用户在柔性显示器10上的操作有关的按压力的高灵敏度。
图17中的(C)示出柔性显示器10接收触控笔s的操作的状态。如在图17中的(B)中示出的操作元件是手指f的情形下,这也适用于操作元件是触控笔s的情形。
<第四实施方式>
图18是根据本技术的第四实施方式的输入设备4的片段的截面图。除了根据这个实施方式的输入设备4的传感器设备41,构造与第一实施方式的相同,并且将酌情省去其描述。图18对应于根据第一实施方式的图2。
(总体构造)
根据这个实施方式的输入设备4包括不同于第一实施方式的传感器设备41,和与第一实施方式的相同的柔性显示器10。传感器设备41包括基板41b和设置有第一电极42和第二电极43的粘合层。第一电极42和第二电极43组成相互电容系统的电容元件。
(传感器设备)
在传感器设备41中,沿着X轴并排地布置的第一电极42和第二电极43形成在柔性显示器10在Z轴方向上的下表面上。
传感器设备41包括布置在基板41b和柔性显示器10之间的多个第一结构45。第一结构45具有与根据第一实施方式的第一结构15相同的构造。第一结构45在Z轴方向上的上表面和柔性显示器10在Z轴方向上的下表面通过粘合层48粘结。利用这个,包含第一结构45和空间部分47的支撑层41a形成在基板41b和柔性显示器10之间。
第二结构46形成在基板41b的Z轴方向上的上表面上的第一结构45之间。第二结构46具有与根据第一实施方式的第二结构16相同的构造。
图18中的(B)示出柔性显示器10接收用户的手指f的操作的状态。在这个状态中,手指f在Z轴方向上向下在柔性显示器10上施加力。这时,柔性显示器10在Z轴方向上向下偏斜。粘结至柔性显示器10的第一电极42和第二电极43与柔性显示器10一起在Z轴方向上向下偏斜并且接近第二结构46。
如上所述,第二结构46形成在柔性显示器10和基板41b之间。因为形成第二结构46的材料具有高于空间部分47中存在的空气的具体的介电常数,所以当第一电极42和第二电极43接近第二结构46时,第一电极42和第二电极43之间的电容增加。
如果采用没有第二结构46的构造,由于第一电极42和第二电极43至基板41b的接近,第一电极42和第二电极43之间的电容增加。然而,因为根据这个实施方式的输入设备4包括除了基板41b之外的第二结构46,所以与没有第二结构46的构造相比较,第一电极42和第二电极43之间的电容中增加的量明显地增加。
因此,在传感器设备41中,也在第一电极42至第二电极43侧面的位移小的情况下,可以检测到位移。换言之,传感器设备41具有检测与用户在柔性显示器10上的操作有关的按压力的高灵敏度。
图18中的(C)示出柔性显示器10接收触控笔s的操作的状态。如在图18中的(B)中示出的操作元件是手指f的情形下,这也适用于操作元件是触控笔s的情形。
<第五实施方式>
图19是示出了根据本技术的第五实施方式的输入设备5的构造的框图。
(总体构造)
输入设备5包括传感器单元500、控制器c5、存储单元55、和通信单元56。
(传感器单元)
传感器单元500包括矩阵传感器51和输入操作单元54。传感器矩阵51包括多个传感器50s并且输出对应于在输入操作单元54上进行的触摸操作和推送操作的检测信号。输入操作单元54组成与接收推送操作的键盘等相同的输入操作屏幕,并且组成与接收触摸操作的跟踪板相同的输入操作屏幕。
图20是传感器单元500的片段的截面图。传感器单元500包括对应于输入操作单元54的后表面的表面S1(第一表面)、基板11b的前表面S2(第二表面)、和基板11b的表面S3(第三表面),其中,参考电极14布置在表面S1上,X电极12布置在前表面S2上,并且Y电极13布置在表面S3上。传感器矩阵51具有根据第一实施方式的支撑层11a和基板11b的层压件结构,并且形成在多个X电极12和多个Y电极13的相应的交叉区域的单独的电容组成部分组成多个传感器50s。
多个传感器50s以例如与通常使用的个人计算机相同的键阵列排列在XY平面上。每个传感器50s基于其布置和分配至其的功能具有预定的大小和形状。组成每个传感器50s的电容元件的数量可以是一个或多于一个。
每个传感器50s组成相互电容系统的传感器设备。组成每个传感器50s的电容元件对应于根据第一实施方式的电容元件50并且基于根据用户操作输入操作单元54改变的X电极12和Y电极13之间的电容输出关于用户的触摸操作或者推送操作的检测信号。
输入操作单元54由根据第一实施方式的柔性显示器10组成。在这种情况下,在输入操作单元54中,显示与通常使用的个人计算机的键盘相同的键阵列的符号或者图案。此外,输入操作单元54可以由金属或者合成树脂制成的盖子组成,在其上绘制与通常使用的个人计算机的键盘相同的键阵列的符号或者图案。
(控制器)
控制器c5对应于根据第一实施方式的控制器c并且包括确定单元c51(检测单元)和信号产生单元c52。确定单元c51基于每个传感器50s的电容中的变化确定手指f(操作元件)与多个传感器50s中任一个接触的第一状态,并且从第一状态改变为手指f按压传感器50s的第二状态。信号产生单元c52基于确定单元c51的确定产生触摸状态和推送状态之间不同的操作信号。
如在第一实施方式中,组成传感器50s的电容元件的电容相对于参考电极14和基板11b之间的距离的变化几乎线性地改变。这样,可以轻易地检测在输入操作单元54上的按压力的幅度的不同。例如,电容变化的量是否超过预定阈值,允许彼此区分对输入操作单元54的触摸操作和推送操作。
例如,在用户将手指f等柔软地放在输入操作单元54的操作表面(图20)上的状态中,微弱的力施加至操作表面54a。另一方面,在用户进行推进按键的操作的情况下,与手指f等柔软地放的状态的负载相比,较大的负载施加至操作表面54a。在传感器单元500中,传感器50s的电容根据力的量增加和减小。可以基于对应于电容中的这个变化的幅度的值估计负载,并且区分用户将手柔软地放置表面宽度触摸状态和用户推送操作表面f的推送状态。
这里,控制器c5如此组成使得仅输出按键输入的推送状态的按键信息,并且因此可以实现通常使用的键盘的操作感。在这种情况下,传感器单元500可以基于触摸状态中的每个传感器50s中的电容变化的量检测手指f的位置,并且因此可以实现利用触摸检测的坐标的输入。
另一方面,该实施方式的输入设备5可以检测操作表面54a上的XY方向中的坐标并且还可以准确地检测操作表面54a上的负载的幅度。利用这个效果,可以实现以下的新输入。
(输入示例1)
在输入操作单元54由柔性显示器组成的情况下,在输入操作单元54上显示的图像的放大百分比可以根据推送操作表面54a的力改变。例如,地图被显示为图像,和图像的显示被控制使得推入位置的显示器以与推入量成比例的放大百分比改变。
(输入示例2)
在输入设备5被应用至诸如可携带的游戏设备的电子装置的情况下,传感器单元可以用作车辆的加速踏板或者制动踏板的操作键。由此,可以向用户提供对应于推入量的加速感觉或者减速感觉。
(输入示例3)
在由柔性显示器组成的输入操作单元54上浏览多个相片或者文件的情况下,可以根据至操作表面54a的推入力改变页面供给的速度。例如,当操作表面54a被微弱地推送时,可以一个接一个地改变页面,和当操作表面54a被强有力地推送时,可以以多个页面的单元改变。
(输入示例4)
在由柔性显示器组成的输入操作单元54上进行绘制操作的情况下,可以根据推入级别改变待绘制的线路的厚度或者颜色。利用这个,可以实现接近实际绘制感觉的输入。
存储单元55由RAM(随机存取存储器)、ROM(只读存贮器)、其他半导体存储器、等组成并且存储计算出的用户的手指等的操作位置的坐标和在确定单元c51的各种计算中使用的程序等。例如,ROM由非易失性存储器组成并且存储在输入操作单元54的触摸操作和推送操作的确定中使用适当的阈值数据,使得确定单元c51执行诸如操作位置等的计算的计算处理的程序。
存储在存储单元55中的每个传感器50s的电容变化的量的阈值数据可以酌情改变。传感器50s的阈值数据可以是共用的或者传感器50s之间可能不同。换言之,根据传感器50s的位置或者按键类型,预定的一个或者多个传感器50s的灵敏度可以与其他传感器50s的灵敏度不同。
例如,当在输入操作单元54的操作表面54a上放置预定重量的金属板时,可以通过检测相应的传感器50s的输出测量组成传感器矩阵500的单个传感器50s的检测灵敏度。那时,例如,仅需要为每个传感器s单个设定确定触摸操作的阈值数据并且存储在存储单元55中。利用这个,可以减小传感器50s之间的特征的变化,或者可以为具体的传感器50s设定期望的灵敏度特性。
通信单元56如此组成使得信号产生单元c52产生的操作信号的各种类型可以被传输到处理设备p(参见图3)。通信单元c53中的通讯手段可以是通过USB(通用串行总线)等的有线的一个或者诸如“WiFi”(注册商标)或者“蓝牙”(注册商标)的无线的一个。
信号产生单元c52根据来自确定单元c51的输出信号产生操作信号。具体地,信号产生单元c52为触摸状态和推送状态产生不同的操作信号,并且在检测到推送状态的情况下产生特定的操作信号至对应于键盘的每个按键的每个传感器50。
(电极的构造)
在图20中示出的传感器单元500中,通过对操作表面54a的按压操作,支撑层11a支撑的参考电极14偏斜至基板11b侧面,和位于紧接着低于按压位置的传感器50s的电容减小。利用这个,检测在按压位置的触摸操作或者推送操作。
在多个传感器被二维排列的传感器矩阵中,多个相邻的传感器特征和单个的传感器特征需要高精确性。例如,图21中的(A)示出相邻的传感器之间的灵敏度区域没有重叠的示例。在这种情况下,存在相邻的传感器之间的检测灵敏度减小的可能性。图21中的(B)示出电容没有改变为良好的线性度的示例。在这种情况下,难以区分触摸操作和推送操作。此外,图21中的(C)示出每个传感器的电容变化的量很小的示例。在这种情况下,难以确定输入位置。因此,在传感器矩阵中,如图21中的(D)中所示,需要相邻的传感器之间的灵敏度区域的重叠、每个传感器的电容中的良好的线性度的变化、和大量的电容变化。
为了稳定地确保如图21中的(D)中所示的传感器特征,在这个实施方式中,例如,传感器50s的X电极12和Y电极13如图22中所示组成。图22是传感器矩阵51的片段的平面图并且仅示出X电极12和Y电极13。
在这个实施方式中,X电极12布置在Y电极13和参考电极14之间。参考电极14通常被连接至地电位。接近参考电极14的X电极12包含线性电极12a的集合,和远离参考电极14的Y电极13包含平面电极13a。线性电极12a对应在图11中的(C)中示出的电极示例。传感器50s形成在线性电极12a和平面电极13a的交叉区域。
线性电极12a的集合由从中心部分放射状地延伸的多个线性电极图案组成。线性电极12a形成在,例如,200μm或者更小的线宽度中。X电极12和Y电极13由例如,丝网印刷方法形成。
在包含电极的此类构造的传感器矩阵51中,X电极12和Y电极13彼此相对的区变小,和X电极12和Y电极13的任何一个可以电容地耦接至参考电极14。由此,即使当参考电极14的位移的量很微小时,电容变化的量可以很高,并且因此提高电容变化和检测灵敏度的线性度性能。此外,因为单个的线性电极12a具有灵敏度区域,可以轻易地确保相邻的传感器50s之间的灵敏度最低值。
图23是示出线性电极12a的构造示例的示意图。图23中的(A)对应于图22的线性电极。在这个示例中,电容元件51的中心部分和其圆周部分之间的电极密度不同,由于手指接近中心部分而引起的电容变化的量很大。图23中的(B)示出在(A)示例中示出的放射状线性电极其中一个形成为比其他线性电极厚的示例。利用这个,厚线性电极上的电容变化的量可以增加多于在其他线性电极上的。此外,图23中的(C)和(D)均示出环形线性电极基本上布置在中心和线性电极从中心放射状地形成的示例。由此,可以抑制线性电极在中心部分的浓度并且可以防止减小的灵敏度区域的产生。
图23中的(E)至(H)均示出均形成为环形或者长方形环形形状的多个线性电极组合形成集合体的示例。利用这个,可以调节电极密度并且可以抑制减小的灵敏度区域的产生。此外,图23中的(I)至(L)均示出每个在Y轴方向上排列的多个线性电极组合形成集和体的示例。线性电极的形状、长度、行距、等的调节允许获得期望的电极密度。
另外,图23中的(M)至(P)均示出线性电极在X轴方向或者Y轴方向上不对称布置的示例。电极如此形成使得电极密度不对称,并且因此传感器50s的检测灵敏度可以在每个区域调节。因此,可以精密地调节传感器50s中的检测灵敏度。
另一方面,图24中示出电极的另一个构造示例。图25是其一部分的放大示图。在这个示例中,X电极12和Y电极13均由多个线性配线电极组成并且排列为基本上彼此正交。每个传感器50s包含多个X电极12和Y电极13的多个交叉部分。换言之,每个传感器50s由多个电容元件50c组成。利用这个,确保单个传感器50s的检测灵敏度和高线性度性能的输出特性。应注意,每个传感器50s仅需要包含至少一个电极交叉部分。
多个电极交叉部分(即,组成每个传感器50s的电容元件)形成每个区域的不同密度。在图24的示例中,电极12和13被排列使得电极12之间和电极13之间的线距离连续地增加,如从传感器50s的中心分离。因此,电容元件50c的密度在传感器50s的中心侧面上较高和在传感器50s的圆周侧面上较低。因此,在接近传感器50s的中心的位置可以获得具有较高的电容变化量的输出特性。
应注意,无需限制于上述示例,例如,传感器50s可以配置为使得在接近中心侧面的位置的密度较低。选择性地调节极间距离,并且因此可以获得期望输出特性。
图26示出电极的再另一个构造示例。也在这个示例中,X电极12和Y电极13均由多个线性配线电极组成并且排列为基本上彼此正交。在这个示例中,多个X电极和多个Y电极13包含X电极和Y电极以部分地无规则的行距排列的区域。
在该实施方式的传感器单元500中,输入操作单元54的圆周部分由输入设备5的壳体(未示出)使用压敏带子等支撑。这样,与中心部分相比,输入操作单元54的圆周部分根据输入操作很难变形。因此,可以通过内部圆周侧面而非输入位置上的传感器检测输入操作单元54在圆周侧面的输入位置。
为了消除此类顾虑,在这个示例的传感器单元500中,X电极12和Y电极13如此排列使得传感器矩阵51的圆周侧面上的区域121和131中极间距离短于其中心侧面上的区域120和130中的极间距离。由此,即使在输入操作单元54的圆周区域中进行输入时,因为检测圆周区域的电容元件位于中心侧面,所以可以准确地检测输入位置。
应注意,无需局限于具有无规则的配线间隔的部分被设置在如上所述的传感器矩阵的圆周侧面的情形,可以根据传感器的规格或者需要的特性进行任意的设置。
<第六实施方式>
图27是根据本技术的第六实施方式的输入设备6的片段的截面图。除了根据这个实施方式的输入设备6的传感器设备610,构造与第一实施方式的相同,并且将酌情省去其描述。
根据这个实施方式的传感器设备610包括包含多个电容元件60s的基板610b、导电层64、和支撑层610a。
基板610b包括X电极62、支撑X电极62的第一基底材料601、和支撑Y电极63的第二基底材料602。X电极62由排列在X轴方向上并且形成在第一基底材料601的前表面(图的上表面)上的多个配线电极组成。在这个实施方式中,X电极62由各自包括任意数量的电极的配线电极组组成,其中,具有至少Y电极63的单个的交叉区域以预定的行距排列在X轴方向上。类似地,Y电极63由排列在Y轴方向上并且形成在第二基底材料602的前表面(图的上表面)上的多个配线电极组成。在这个实施方式中,Y电极63由各自包括任意数量的电极的配线电极组组成,其中,具有至少X电极62的单个的交叉区域以预定的行距排列在Y轴方向上。
第一基底材料601通过粘合层68a层压在第二基底材料602上。X电极62和Y电极63均由例如,诸如Ag(银)或者Cu(铜)的金属材料、包含这些金属材料的导电膏、或者诸如ITO(氧化铟锡)的导电氧化物组成。第一和第二基底材料601和602均由例如,诸如PET、PENPI和PC的电绝缘性能的树脂薄片组成。
多个电容元件60s被组成作为相互电容系统的电容元件,电容元件形成在X电极62和Y电极63的交叉区域并且均具有对应于区和电极62和63彼此相对的距离的预定的电容和第一基底材料601和粘合层68a的介电常数。在这个实施方式中,多个电容元件60s以矩阵排列在平行于XY平面的表面。
基板610b还包括绝缘层66和屏蔽层69。
绝缘层66由例如,PET或者PEN制成的绝缘树脂薄膜组成。绝缘层66设置在X电极62和支撑层610a之间并且通过粘合层68b涂敷X电极62。由此,可以防止导电层64和第一基底材料601(X电极62)之间的电接触。粘合层68b形成为涂敷布置在第一基底材料601的前表面的X电极62的厚度并且连接第一基底材料601和绝缘层66至彼此。应注意,无需局限于由树脂膜组成的情形,绝缘层66可以是应用在第一基底材料601上的绝缘薄膜。
屏蔽层69由形成在第二基底材料602的后表面(图的下表面)上的铜箔等制成的金属层形成。屏蔽层69是为了屏蔽从传感器设备6的后表面侧面输入的电磁噪声至电容元件60s并且以例如,固体形式、啮合形式、或者栅格形式形成。屏蔽层69被连接至地电位,并且因此可以提高上述屏蔽作用。应注意,可以根据需要省去屏蔽层69的安装。
导电层64由第三基底材料603支撑。第三基底材料603由与第一和第二基底材料601和602相同的树脂薄片组成,并且通过粘合层68c粘结至柔性显示器10的后表面。
导电层64对应于在第一实施方式中描述的参考电极并且通过粘合层68c粘结至与基板11b相对的柔性显示器10的后表面。导电层64形成为例如,固体形式、啮合形式、或者栅格形式,并且被连接至地电位。
导电层64被布置为通过支撑层610a与电容元件60s(基板11b)相对。导电层64具有柔性并且被组成为与柔性显示器10一起通过接收按压力部分地朝向电容元件60s(基板11b)可变形,按压力被输入至作为柔性显示器10的前表面的操作表面10a。
支撑层610a被布置在电容元件60s(基板11b)和导电层64之间。支撑层610a包括支撑导电层64的多个结构650和形成在多个结构650之间的空间部分67上。
空间部分67被组成为能够部分地改变电容元件60s(基板11b)和导电层64之间的距离。由此,因为接近导电层64的变形的区的多个电容元件60s的电容元件60s的电容(交叉电容)改变,所以可以基于电容中的变化静电地检测至操作表面10a的输入位置或者按压量。
空间部分67通常由空气层形成,但是可以填充除了空气的其他气体(例如,惰性气体)。此外,空间部分67围绕多个结构650连通,但是根据结构650的形状(例如,在结构650以栅格形式形成的情况下),空间部分67可以被分隔为多个空间部分。
在这个实施方式中,多个结构650由能够在Z轴方向上弹性地变形的弹性材料形成。作为此类材料,例如,除了诸如硅橡胶或者氨基甲酸乙酯橡胶的橡胶材料外,可采用诸如多孔材料的适当的减震材料。多个结构650均形成为半球或者穹顶形状,即,在导电层64侧面上突起。然而,多个结构650不局限于此,并且可以形成在为诸如立方形状和圆柱形的其他几何形状。此外,多个结构650不局限于形成为点状的情形,并且可以形成为线性的和与,例如X轴方向或者Y轴方向平行。
支撑层610a还包括连接部分651。连接部分651被布置在多个结构650和导电层64之间并且连接多个结构650至导电层64。由此,可以使结构650与导电层64紧密接触并且防止多个结构650和导电层64之间的位移或者分离。此外,因为连接部分651仅形成在紧接着结构650的上面的位置,可以防止在连接支撑层610a和导电层64的过程中导电层64和绝缘层66粘附至彼此。作为组成连接部分651的连接材料,使用压敏胶粘剂、胶粘剂等。
通过使用,例如,诸如丝网印刷方法、垫片印刷方法、和转移方法的适当的印刷技术,多个结构650形成在绝缘层66的前表面上。在那时,框架主体650a由组成结构650的材料形成在绝缘层66的前表面的圆周部分。此外,在形成连接部分651时,组成连接部分651的连接材料还被应用至框架主体650a的前表面。由此,框架主体650a整体地连接至导电层64。
框架主体650a可以沿着绝缘层66的圆周连续地或者断续地形成。在框架主体650a沿着绝缘层66的圆周连续地形成的情况下,可以将空间部分67从传感器设备610的周围区域隔离,并且因此可以阻断水等滲透至空间部分67。另一方面,在框架主体650a沿着绝缘层66的圆周断续地形成的情况下,空间部分67可以与传感器设备610的周围区连通,并且因此可以避免框架主体650a的内侧和外侧之间的压力差的产生。
此外,在这个实施方式中,多个结构650布置在紧接着电容元件60s的上面。换言之,多个结构650的每个被排列在X电极62和Y电极63的交叉区域的至少一部分中。由此,几乎可以在整个操作表面10a上进行利用小的灵敏度差的各向同性的压力检测。
换言之,在根据这个实施方式的传感器设备610中,因为结构650由弹性材料形成,即使在紧接着结构650的任何一个的上面的位置输入按压操作的情况下,由于结构650的弹性变形,对应于按压位置的导电层64的区域和与区域相反的电容元件60s之间的相对距离减小。因此,即使在弹性变形结构650的变形量小的情况下,可以检测对应于输入位置的电容元件60s的电容的变化。
另一方面,在多个相邻的结构650之间的空隙输入按压操作的情况下,因为在紧接着输入位置的下面不存在结构650,所以,与紧接着按压结构650的上面的位置的情形相比,对应于按压位置的导电层64的区域具有较大的变形的量。这样,导电层64的变形区域被轻易地电容耦接至周围的电容元件60s,因此,可以检测电容元件60s的电容的变化。
如上所述,还在这个实施方式中,可以获得与第一实施方式中的那些相同的作用和效果。此外,根据该实施方式的传感器设备610,因为可以实现具有小的输入灵敏度差的操作表面10a,所以在柔性显示器10作为输入操作单元应用的情况下可以提供极好的输入操作感。此外,通过中心的计算可以高度准确地检测输入位置的XY坐标。
应注意,在这个实施方式中,绝缘层66还具有作为第一实施方式的传感器设备11中的第二结构的功能。换言之,根据这个实施方式的传感器设备610对应于在图1中示出的传感器设备11中的整合第一结构15和第二结构16的结构。
<第六实施方式的变形例1>
图28是示出根据第六实施方式的传感器设备的变形例的片段的截面图。应注意,在图28中,对应于图27那些的部分由相同的参考符号表示并且将省略其描述。
在根据这个变形例的输入设备6A(传感器设备611)中,基板611b的构造不同于在图27中示出的传感器设备610的基板610b的构造。在基板611b中,多个结构650被直接地设置在支撑X电极62的第一基底材料601上。换言之,该实施方式的传感器设备61A具有图27的传感器设备6中的绝缘层66被省略的构造。
还在这个实施方式中,可以获得与上述第六实施方式中的那些相同的作用和效果。根据这个变形例,可以缩短彼此相对的导电层64和电容元件60s的距离,并且因此可以提高按压操作的灵敏度。此外,根据这个变形例,因为基板611b的构造可以很薄,所以可以实现传感器设备的变薄。
<第六实施方式的变形例2>
图29是示出根据第六实施方式的传感器设备的另一个变形例的片段的截面图。应注意,在图29中,对应于图27的那些部分由相同的参考符号表示并且将省略其描述。
在根据这个变形例的输入设备6B(传感器设备612)中,支撑层611a的构造不同于在图27中示出的传感器设备610的支撑层610a的构造。换言之,在根据这个变形例的支撑层611a中,多个结构652由包含压敏胶粘剂、胶粘剂等的连接材料形成并且具有形成支撑层611a中的空间部分67的功能和连接绝缘层66(基板610b)和导电层64至彼此的功能。多个结构652均形成为半球或者穹顶形状,即,在导电层64侧面上突起。
应注意,在根据这个变形例的传感器设备6B中,形成在绝缘层66的周围区域的框架主体653还由形成结构652的连接材料的单层形成。
还在这个变形例中,可以获得与上述第六实施方式中的那些相同的作用和效果。根据这个变形例,因为结构652可以由单层形成,所以可以促进支撑层611a的制造。利用这个,可以提高生产力和可以减小材料成本。
另一方面,如图30中所示,多个结构652可以均形成为半球或者穹顶形状,即,在基板610b侧面上突起。利用这个,当在多个结构652之间的空隙的位置进行按压操作时,防止导电层64的变形区域粘结至结构652的弯曲的外围表面。因此,在释放按压操作时,导电层64的变形区域可以适当地和迅速地返回至最初的位置。
替换地,如图31中所示,多个结构652可以形成为圆柱形或者棱镜形状。在这种情况下,多个结构652可以由以预定形状和尺寸穿孔的压敏薄片(双侧薄片)形成。还利用此类构造,可以获得与图30中那些相同的作用和效果。
<第六实施方式的变形例3>
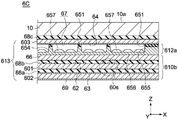
图32是示出根据第六实施方式的传感器设备的另一个变形例的片段的截面图。图33是输入设备6C的示意性的分解立体图。应注意,在图32和33中,对应于图27那些的部分由相同的参考符号表示并且将省略其描述。在根据这个变形例的输入设备6C(传感器设备613)中,支撑层612a的构造不同于在图27中示出的传感器设备610的支撑层610a的构造。换言之,根据这个变形例的支撑层612a包括多个结构654、框架主体655、和基底部656,和这些多个结构654、框架主体655、和基底部656整体地由单个树脂材料(例如,紫外线固化树脂)形成和由例如,转移方法形成。
多个结构654的每个具有与第一实施方式中的第一结构15相同的柱状形状。框架主体655可以沿着绝缘层66的周围区连续地或者断续地形成。基底部656形成在绝缘层66的前表面上和用作多个结构654和框架主体655的垫物。此外,多个结构654和框架主体655被通过连接部分651连接到导电层64。
这个变形例中的支撑层612a还包括布置在多个结构654之间的调节部657。调节部657被布置在与导电层64相对的基底部656上,并且被配置为抑制导电层64与基底部656的接触。空间部分67以层状结构介入基底部656和导电层64之间。由此,还在基底部656(结构654和框架主体655)由具有预定值或在固化之后更强的粘着性(粘合性能)的材料,诸如紫外线固化树脂形成的情况下,可以抑制在按压操作时变形的导电层64粘贴至基底部656并且可以确保适当的输入释放操作。
在这种情况下,除了形成基底部656的材料,调节部657由具有较低粘着性的材料形成。调节部657的形状、尺寸、和数量都没有具体的限制。在这个变形例中,一个或者多个调节部657被设置在X轴方向上相邻的多个结构654之间的每个空隙中。只要调节部657在高度上短于结构654和框架主体655,那么调节部657的形状没有具体限制。例如,调节部657形成为在导电层64侧面上突起的半球或者穹顶形状,其他弯曲形状、或者立方体形状。
<第六实施方式的变形例4>
图34是示出根据第六实施方式的传感器设备的另一个变形例的片段的截面图。应注意,在图34中,对应于图27和32那些的部分由相同参考符号表示并且将省略其描述。
根据这个变形例的输入设备6D(传感器设备614)包括具有与在图28中示出的基板相同的构造的基板611b。换言之,该实施方式的传感器设备614具有图27的传感器设备610的构造,其中,省略绝缘层66,底部层656形成在支撑X电极62的第一基底材料601上,多个结构654紧接着电容元件60s的上面布置。
还在这个变形例中,可以获得与上述第六实施方式中的那些相同的作用和效果。根据这个变形例,可以缩短彼此相对的导电层64和电容元件60s的距离,并且因此可以提高按压操作的灵敏度。此外,根据这个变形例,因为基板611b的构造可以很薄,所以可以实现传感器设备的变薄。
<第七实施方式>
图35是根据本技术的第七实施方式的输入设备的片段的截面图。应注意,在图35中,对应于第六实施方式那些的部分由相同的参考符号表示并且将省略其描述。
该实施方式的传感器设备710在基板710b的构造上不同于上述第六实施方式的那个。换言之,在该实施方式的基板710b中,排列多个X电极62使得位于多个结构650之间。换言之,多个结构650排列在除了多个X电极62和多个Y电极63的交叉区域之外的区域中。应注意,无需限制于图35的示例,排列X电极62的方法还可以相同的方式应用至在图28至34中示出的构造示例。
此外,该实施方式的输入设备7在包括柔性键盘20(取代柔性显示器10)的构造上不同于上述第六实施方式的那个。柔性键盘20被通过粘合层68c连接至支撑导电层64的第三基底材料603的前表面。
图36是示出整个柔性键盘20的平面图。柔性键盘20由例如,电绝缘性能的塑料薄片组成,但是可以由金属薄片形成。在这种情况下,在柔性键盘由金属薄片形成的情况下,可以省略导电层64。多个按键区域20a被排列在柔性键盘20的前表面上。柔性键盘20不限于形成为平坦薄片的形状的示例。例如,按键区域20a可以由预定的凹-凸表面形成。
多个按键区域20a不局限于所有按键区域20a以相同的尺寸和形状形成的情形并且可能具有不同于根据按键的类型的其他按键的尺寸。在每个按键区域20a中,可以提供适当的按键显示器。按键显示器可以显示按键的类型、每个按键的位置(轮廓)、或者两者。
图37是组成传感器设备710的支撑层610a的示意性的平面图。支撑层610a包括多个结构650和形成在多个结构650之间的空间部分67。在这个实施方式中,多个结构650由具有相对高的硬度的材料,诸如,环氧树脂形成,但是可以由具有相对低的硬度的弹性材料,诸如聚氨酯类树脂形成。替换地,多个结构650可以是包括基底部和如图32中所示的框架主体的连续主体并且由紫外线固化树脂形成。另一方面,空间部分67均形成为对应于柔性键盘20的按键区域20a的形状和尺寸。另一方面,多个结构650被设置在柔性键盘20的按键区域20a(在图37中利用阴影线示出的区域)之间。
图38是组成传感器设备710的基板710b的示意性的平面图。图39是沿着图38的线B-B’的方向截取的输入设备7的截面图。如上所述,因为多个结构650被排列在除了多个X电极62和多个Y电极63的交叉区域之外的相应的区域中,所以电容元件60s被布置在Z轴方向上相对按键区域20a(空间部分67)的位置。特别地,在这个实施方式中,X电极62被通过按键区域20a之间的单线布线和通过将多个线分支在按键区域20a中布线。由此,因为与相应的按键区域20a相对的电容元件60s的数量增加,所以可以提高按键输入操作的检测灵敏度。
在这个实施方式中的如上所述组成的输入设备7中,因为一个或者多个电容元件60s被布置为与柔性键盘20的每个按键区域20a相对,所以可以高灵敏度地检测输入位置。
例如,图40是示出根据这个实施方式的至输入设备7的输入操作和电容元件60s的输出之间的关系的示意图。根据该实施方式的输入设备7,在位于按键区域20a的下面的电容元件60s和与电容元件60s相邻的的另一个电容元件60s之间产生显著的电容变化,并且因此可以高精确度地检测输入按键位置并且适当地作为诸如键盘的输入设备使用输入设备7。在这种情况下,多个结构650均由具有相对高的硬度的材料形成,并且因此可以更加减小另一个相邻的电容元件60s的电容变化。
另一方面,图41(作为比较示出)是示出至根据第六实施方式的输入设备6的输入操作和电容元件60s的输出之间的关系的示意图。如图41中所示,在电容元件60s布置为与结构650相对的情况下,接近输入位置的多个电容元件60s产生电容变化。在这个示例中,特别适合如在第一实施方式中的情形,通过中心的计算指定柔性显示器20的按压位置(XY坐标)。
在上文,尽管已经详细描述了本技术的实施方式,然而,本技术并不局限于上述实施方式,并且在不偏离本技术的主旨的情况下可以理所当然地做出各种修改。
例如,传感器设备可以通过单独的传感器设备(无需设置柔性显示器)组成诸如压力传感器的检测设备。取代柔性显示器,由树脂等形成的薄片可以粘结至传感器设备。因为本技术的传感器设备具有高的灵敏度,所以可以遵守薄片的广泛和多样。
此外,本技术可以应用至诸如触摸板、鼠标、和键盘的信息输入装置,和诸如电视和数字引导标示的信息显示装置。此外,本技术还可应用于诸如移动电话、智能手机、笔记本电脑PC、和平板电脑PC的信息处理装置。
此外,在上文的实施方式中,已经作为示例描述包括在XY平面中排列的多个电容元件的传感器设备,但是本技术不限于此并且还可以应用于包括单个电容元件的传感器设备。在这种情况下,传感器设备可以被配置为游戏控制器等的按压开关。
另外,例如,在第一实施方式中,参考电极14布置在柔性显示器10和支撑层11a之间,但是参考电极14可以合并在柔性显示器10中。在这种情况下,参考电极可以分开地布置在柔性显示器10上或者可以通过合并在柔性显示器10中的导电层(例如,TFT(薄膜晶体管)的扫描电极等)构造。
应注意,本技术可以具有以下构造。
(1)传感器设备,包括:
彼此相对的第一表面和第二表面;
支撑层包括
第一结构,即,部分地布置在第一表面和第二表面之间并且具有第一高度,和
空间部分,形成在第一表面和第二表面之间;和
电容元件,包括第一电极和第二电极,第一电极布置在第一表面和第二表面的其中一个上,第二电极布置为与第一电极相对,电容元件被配置为根据通过空间部分彼此相对的第一表面和第二表面之间的距离的变化在第一电极和第二电极之间的电容中产生变化。
(2)根据(1)的传感器设备,其中
支撑层还包括第二结构,布置在空间部分中并且具有比第一高度短的第二高度。
(3)根据(2)的传感器设备,其中
第二结构形成在第一表面和第二表面中至少一个上。
(4)根据(1)至(3)中的任一项的传感器设备,进一步包括:
第三表面,相对于第二表面布置在第一表面的相对侧上并且与第二表面相对;和
参考电极,形成在第一表面上,其中
第一电极形成在第二表面上,和第二电极形成在第三表面上。
(5)根据(1)至(3)中的任一项的传感器设备,其中
第一电极形成在第一表面上,和第二电极形成在第二表面上。
(6)根据(1)至(3)中的任一项的传感器设备,其中
第一电极和第二电极形成在第一表面上。
(7)根据(1)至(3)中任一项的传感器设备,进一步包括参考电极,形成在第一表面上,其中
第一电极和第二电极形成在第二表面上。
(8)根据(1)至(7)中的任一项的传感器设备,其中
第一结构由多个柱状体形成,和
多个柱状体有规则地排列。
(9)根据(8)的传感器设备,其中
多个柱状体的每个形成为具有与第一表面平行的圆形截面和多边形截面其中一个。
(10)传感器设备,包括:
基板包括
多个第一电极,和
多个第二电极,与多个第一电极相对;
导电层,与多个第一电极相对并且具有柔性;和支撑层包括
多个结构,布置在基板和导电层之间并且支撑导电层,和
空间部分,形成在多个结构之间并且能够部分地改变基板和导电层之间的距离。
(11)根据(10)的传感器设备,其中
基板还包括设置在多个第一电极和支撑层之间的绝缘层。
(12)根据(10)或者(11)的传感器设备,其中
多个结构的每个排列在多个第一电极和多个第二电极的交叉区域的至少一部分中。
(13)根据(12)的传感器设备,其中
多个结构的每个由弹性材料形成。
(14)根据(10)或者(11)的传感器设备,其中
多个结构的每个排列在除了多个第一电极和多个第二电极的交叉区域之外的区域中。
(15)根据(10)至(14)中的任一项的传感器设备,其中
基板还包括支撑多个第一电极的基底材料,和
多个结构的每一个布置在基底材料上。
(16)根据(10)至(15)中的任一项的传感器设备,其中
支撑层还包括布置在多个结构和导电层之间并且连接多个结构至导电层的连接部分。
(17)根据(10)至(16)中的任一项的传感器设备,其中
多个结构的每个由连接基板和导电层之间的空隙的连接材料形成。
(18)根据(10)至(17)中的任一项的传感器设备,其中支撑层还包括
基底部,支撑多个结构并且与导电层相对,具有空间部分以层状结构介入基底部和导电层,和
调节部,布置在基底部上并且抑制导电层与基底部的接触。
(19)输入设备,包括:
彼此相对的第一表面和第二表面;
支撑层包括
第一结构,即,部分地布置在第一表面和第二表面之间并且具有第一高度,和
空间部分,形成在第一表面和第二表面之间;
电容元件,包括第一电极和第二电极,第一电极布置在第一表面和第二表面的其中一个上,第二电极布置为与第一电极相对,电容元件被构造为根据通过空间部分彼此相对的第一表面和第二表面之间额距离的变化产生第一电极和第二电极之间的电容的变化;和
控制器包括
检测单元,检测电容的变化,和
信号产生单元,基于检测单元的检测的结果产生操作信号。
(20)输入设备,包括:
多个传感器,每个包括
彼此相对的第一表面和第二表面,
支撑层包括
第一结构,即,部分地布置在第一表面和第二表面之间并且具有第一高度,和
空间部分,形成在第一表面和第二表面之间,和电容元件,包括第一电极和第二电极,第一电极布置在第一表面和第二表面的其中一个上,第二电极被布置为与第一电极相对,电容元件被构造为根据通过空间部分彼此相对的第一表面和第二表面之间的距离的变化产生第一电极和第二电极之间的电容的变化;和控制器包括
检测单元,检测电容的变化,和
信号产生单元,基于检测单元的检测的结果产生操作信号。
(21)根据(20)的输入设备,其中
检测单元基于电容元件的电容的变化确定操作元件与多个传感器中任一个接触的第一状态,并且从第一状态改变为操作元件按压传感器的第二状态。
(22)根据(20)或者(21)的输入设备,其中
多个传感器的每个还包括
第三表面,相对于第二表面布置在第一表面的相对侧上并且与第二表面相对,和
参考电极,形成在第一表面上,和
第一电极形成在第二表面上,和第二电极形成在第三表面上。
(23)根据(22)的输入设备,其中
第一电极包括线性电极的集合,和
第二电极包括平面电极。
(24)根据(23)的输入设备,其中
每个线性电极具有200μm或者更小的线宽度。
(25)根据(20)至(24)中的任一项的输入设备,其中
第一电极包括排列在第一轴方向上的多个第一配线电极,
第二电极包括排列在与第一轴方向交叉的第二轴方向上的多个第二配线电极,和
多个传感器的每个包括多个第一配线电极和多个第二配线电极的多个交叉部分。
(26)根据(25)的输入设备,其中,多个交叉部分以不同的密度形成在每个区域。
(27)根据(20)至(26)中的任一项的输入设备,其中
多个传感器的每个包括多个传感器,各自具有通过电容元件检测电容的不同的灵敏度。
(28)电子装置,包括:
彼此相对的第一表面和第二表面;
支撑层包括
第一结构,即,部分地布置在第一表面和第二表面之间并且具有第一高度,和
空间部分,形成在第一表面和第二表面之间;
电容元件,包括第一电极和第二电极,第一电极布置在第一表面和第二表面的其中一个上,第二电极被布置为与第一电极相对,电容元件被构造为根据通过空间部分彼此相对的第一表面和第二表面之间的距离的变化产生第一电极和第二电极之间的电容的变化;
控制器包括
检测单元,检测电容的变化,和
信号产生单元,基于检测单元的检测的结果产生操作信号;和
柔性显示器,布置在电容元件的第一表面上并且基于操作信号显示图像。
(29)电子装置,包括:
多个传感器,每个包括
彼此相对的第一表面和第二表面,支撑层包括
第一结构,即,部分地布置在第一表面和第二表面之间并且具有第一高度,和
空间部分,形成在第一表面和第二表面之间,和电容元件,包括第一电极和第二电极,第一电极布置在第一表面和第二表面的其中一个上,第二电极被布置为与第一电极相对,电容元件被构造为根据通过空间部分彼此相对的第一表面和第二表面之间的距离的变化产生第一电极和第二电极之间的电容的变化;
控制器包括
检测单元,检测电容的变化,和
信号产生单元,基于检测单元的检测的结果产生操作信号;和
输入操作单元,布置在电容元件的第一表面上。
(30)根据(29)的电子装置,其中
第一电极包括排列在第一轴方向上的多个第一配线电极,
第二电极包括排列在与第一轴方向交叉的第二轴方向上的多个第二配线电极,和
多个传感器的每个包括多个第一配线电极和多个第二配线电极的至少一个交叉部分。
(31)根据(30)的电子装置,其中
多个第一配线电极和多个第二配线电极的每个包括具有部分无规则的行距的排列的区域。
(32)根据(29)至(31)的任何一项的电子装置,其中
输入操作单元是基于操作信号显示图像的柔性显示器。
符号说明
1、2、3、4、5、6、7 输入设备
10柔性显示器
20柔性键盘
11传感器设备
11a 支撑层
11b 基板
12X 电极
13Y 电极
14参考电极
15第一结构
16第二结构
17空间部分
18粘合层
50s、60s 传感器
Claims (22)
1.一种传感器设备,包括:
彼此相对的第一表面和第二表面;
第三表面,相对于所述第二表面布置在所述第一表面的相对侧上并且与所述第二表面相对;
参考电极,形成在所述第一表面上;
支撑层,所述支撑层包括
第一结构,部分地布置在所述第一表面和所述第二表面之间并且具有第一高度,和
空间部分,形成在所述第一表面和所述第二表面之间;以及
电容元件,包括第一电极和第二电极,所述第一电极布置在所述第二表面上,所述第二电极被布置在所述第三表面上,并且
其中所述电容元件被构造为根据通过所述空间部分彼此相对的所述第一表面和所述第二表面之间的距离的变化产生所述第一电极和所述第二电极之间的电容的变化,并且
所述第一结构被布置在与所述第一电极和第二电极的交叉区域不同的区域中。
2.根据权利要求1所述的传感器设备,其中,所述第一结构由弹性材料形成。
3.根据权利要求1所述的传感器设备,其中,所述第一结构由弹性可变形材料形成。
4.根据权利要求3所述的传感器设备,其中,所述弹性可变形材料包括PET、硅树脂和多孔材料。
5.根据权利要求1所述的传感器设备,其中,所述第一结构为柱状体。
6.根据权利要求1所述的传感器设备,其中,还包括布置在所述第一结构和所述参考电极之间并且将所述第一结构连接至所述参考电极的粘合层。
7.根据权利要求1所述的传感器设备,其中,所述第一结构由连接材料形成。
8.根据权利要求1所述的传感器设备,其中,所述传感器为自电容系统。
9.根据权利要求1所述的传感器设备,其中,所述传感器为互电容系统。
10.一种传感器设备,包括:
彼此相对的第一表面和第二表面;
第三表面,相对于所述第二表面布置在所述第一表面的相对侧上并且与所述第二表面相对;
参考电极,形成在所述第一表面上;
支撑层,所述支撑层包括
第一结构,部分地布置在所述第一表面和所述第二表面之间并且具有第一高度,和
空间部分,形成在所述第一表面和所述第二表面之间;以及
电容元件,包括第一电极和第二电极,所述第一电极布置在所述第二表面上,所述第二电极被布置在所述第三表面上,并且
其中所述电容元件被构造为根据通过所述空间部分彼此相对的所述第一表面和所述第二表面之间的距离的变化产生所述第一电极和所述第二电极之间的电容的变化,并且
所述第一结构被布置在所述第一电极和第二电极的交叉区域中。
11.根据权利要求10所述的传感器设备,其中,所述第一结构由弹性材料形成。
12.根据权利要求10所述的传感器设备,其中,所述第一结构由弹性可变形材料形成。
13.根据权利要求12所述的传感器设备,其中,所述弹性可变形材料包括PET、硅树脂和多孔材料。
14.根据权利要求10所述的传感器设备,其中,所述第一结构为柱状体。
15.根据权利要求10所述的传感器设备,其中,还包括布置在所述第一结构和所述参考电极之间并且将所述第一结构连接至所述参考电极的粘合层。
16.根据权利要求10所述的传感器设备,其中,所述第一结构由连接材料形成。
17.根据权利要求10所述的传感器设备,其中,所述传感器为自电容系统。
18.根据权利要求10所述的传感器设备,其中,所述传感器为互电容系统。
19.一种传感器设备,包括:
彼此相对的第一表面和第二表面;
第三表面,相对于所述第二表面布置在所述第一表面的相对侧上并且与所述第二表面相对;
参考电极,形成在所述第一表面上;
支撑层,所述支撑层包括
第一结构,部分地布置在所述第一表面和所述第二表面之间并且具有第一高度,和
空间部分,形成在所述第一表面和所述第二表面之间;以及
电容元件,包括第一电极和第二电极,所述第一电极和所述第二电极布置在所述第二表面上,并且
其中所述电容元件被构造为根据通过所述空间部分彼此相对的所述第一表面和所述第二表面之间的距离的变化产生所述第一电极和所述第二电极之间的电容的变化。
20.一种输入设备,包括:
一个或多个传感器,每个传感器包括:
彼此相对的第一表面和第二表面;
第三表面,相对于所述第二表面布置在所述第一表面的相对侧上并且与所述第二表面相对;
参考电极,形成在所述第一表面上;
支撑层,所述支撑层包括
第一结构,部分地布置在所述第一表面和所述第二表面之间并且具有第一高度,和
空间部分,形成在所述第一表面和所述第二表面之间;以及
电容元件,包括第一电极和第二电极,所述第一电极布置在所述第二表面上,所述第二电极被布置在所述第三表面上,并且
其中所述电容元件被构造为根据通过所述空间部分彼此相对的所述第一表面和所述第二表面之间的距离的变化产生所述第一电极和所述第二电极之间的电容的变化,并且
所述第一结构被布置在与所述第一电极和第二电极的交叉区域不同的区域中。
21.一种输入设备,包括:
一个或多个传感器,每个传感器包括:
彼此相对的第一表面和第二表面;
第三表面,相对于所述第二表面布置在所述第一表面的相对侧上并且与所述第二表面相对;
参考电极,形成在所述第一表面上;
支撑层,所述支撑层包括
第一结构,部分地布置在所述第一表面和所述第二表面之间并且具有第一高度,和
空间部分,形成在所述第一表面和所述第二表面之间;以及
电容元件,包括第一电极和第二电极,所述第一电极布置在所述第二表面上,所述第二电极被布置在所述第三表面上,并且
其中所述电容元件被构造为根据通过所述空间部分彼此相对的所述第一表面和所述第二表面之间的距离的变化产生所述第一电极和所述第二电极之间的电容的变化,并且
所述第一结构被布置在所述第一电极和第二电极的交叉区域中。
22.一种输入设备,包括:
一个或多个传感器,每个传感器包括:
彼此相对的第一表面和第二表面;
第三表面,相对于所述第二表面布置在所述第一表面的相对侧上并且与所述第二表面相对;
参考电极,形成在所述第一表面上;
支撑层,所述支撑层包括
第一结构,部分地布置在所述第一表面和所述第二表面之间并且具有第一高度,和
空间部分,形成在所述第一表面和所述第二表面之间;以及
电容元件,包括第一电极和第二电极,所述第一电极和所述第二电极布置在所述第二表面上,并且
其中所述电容元件被构造为根据通过所述空间部分彼此相对的所述第一表面和所述第二表面之间的距离的变化产生所述第一电极和所述第二电极之间的电容的变化。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012-052821 | 2012-03-09 | ||
| JP2012052821 | 2012-03-09 | ||
| JP2012-144470 | 2012-06-27 | ||
| JP2012144470 | 2012-06-27 | ||
| CN201380012202.1A CN104145240B (zh) | 2012-03-09 | 2013-01-25 | 传感器设备、输入设备和电子装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201380012202.1A Division CN104145240B (zh) | 2012-03-09 | 2013-01-25 | 传感器设备、输入设备和电子装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107505067A CN107505067A (zh) | 2017-12-22 |
| CN107505067B true CN107505067B (zh) | 2020-09-11 |
Family
ID=49116233
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201710659974.4A Active CN107505067B (zh) | 2012-03-09 | 2013-01-25 | 传感器设备、输入设备和电子装置 |
| CN201380012202.1A Active CN104145240B (zh) | 2012-03-09 | 2013-01-25 | 传感器设备、输入设备和电子装置 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201380012202.1A Active CN104145240B (zh) | 2012-03-09 | 2013-01-25 | 传感器设备、输入设备和电子装置 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US9201105B2 (zh) |
| EP (1) | EP2824549B1 (zh) |
| JP (2) | JP6107811B2 (zh) |
| KR (1) | KR20140145117A (zh) |
| CN (2) | CN107505067B (zh) |
| IN (1) | IN2014DN07355A (zh) |
| RU (1) | RU2014135546A (zh) |
| TW (1) | TW201347006A (zh) |
| WO (1) | WO2013132736A1 (zh) |
Families Citing this family (144)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20140145117A (ko) * | 2012-03-09 | 2014-12-22 | 소니 주식회사 | 센서 장치, 입력 장치 및 전자 기기 |
| KR101879831B1 (ko) * | 2012-03-21 | 2018-07-20 | 삼성디스플레이 주식회사 | 플렉시블 표시 장치, 유기 발광 표시 장치 및 플렉시블 표시 장치용 원장 기판 |
| US20140267152A1 (en) * | 2013-03-12 | 2014-09-18 | Mircrochip Technology Incorporated | Force Sensing X-Y Touch Sensor |
| TWI478034B (zh) * | 2012-10-17 | 2015-03-21 | Sentelic Technology Co Ltd | 按鍵觸發方法 |
| GB201219632D0 (en) * | 2012-10-31 | 2012-12-12 | Univ Southampton | Apparatus for sensing and measuring pressure and shear components of a force at an interface between two surfaces |
| CN103812493A (zh) * | 2012-11-06 | 2014-05-21 | 升达科技股份有限公司 | 按键触发方法 |
| JP6119518B2 (ja) | 2013-02-12 | 2017-04-26 | ソニー株式会社 | センサ装置、入力装置及び電子機器 |
| WO2014147943A1 (ja) | 2013-03-18 | 2014-09-25 | ソニー株式会社 | センサ装置、入力装置および電子機器 |
| USD742841S1 (en) * | 2013-03-26 | 2015-11-10 | Sony Corporation | Touch sensitive device |
| WO2015000116A1 (en) * | 2013-07-01 | 2015-01-08 | Texas Instruments Incorporated | Tapered mutual capacitive sensing pattern for single touch |
| JP5943023B2 (ja) * | 2013-07-08 | 2016-06-29 | 凸版印刷株式会社 | タッチセンサ用電極、タッチパネル、および、表示装置 |
| KR101452302B1 (ko) | 2013-07-29 | 2014-10-22 | 주식회사 하이딥 | 터치 센서 패널 |
| US10007380B2 (en) | 2013-07-29 | 2018-06-26 | Hideep Inc. | Touch input device with edge support member |
| KR101681305B1 (ko) * | 2014-08-01 | 2016-12-02 | 주식회사 하이딥 | 터치 입력 장치 |
| JP6205985B2 (ja) * | 2013-08-23 | 2017-10-04 | ソニー株式会社 | 表示装置 |
| JP6142745B2 (ja) * | 2013-09-10 | 2017-06-07 | ソニー株式会社 | センサ装置、入力装置及び電子機器 |
| ITMI20131877A1 (it) * | 2013-11-12 | 2015-05-13 | Whirlpool Co | Interfaccia di comando di tipo capacitivo, in particolare per elettrodomestico, con sicurezza d'uso perfezionata |
| WO2015077102A1 (en) * | 2013-11-25 | 2015-05-28 | Oil States Industries, Inc. | Method and system for health monitoring of composite elastomeric flexible elements |
| KR101686539B1 (ko) * | 2013-12-09 | 2016-12-16 | 주식회사 하이딥 | 터치 입력 장치 |
| KR101712346B1 (ko) | 2014-09-19 | 2017-03-22 | 주식회사 하이딥 | 터치 입력 장치 |
| KR20160048424A (ko) * | 2014-10-24 | 2016-05-04 | 주식회사 하이딥 | 터치 입력 장치 |
| US9752943B2 (en) * | 2014-01-24 | 2017-09-05 | Infineon Technologies Dresden Gmbh | Sensor structures, systems and methods with improved integration and optimized footprint |
| WO2015125119A1 (en) * | 2014-02-20 | 2015-08-27 | Aito Interactive Oy | A piezoelectric sensor for detecting an actuation direction, and an electrical appliance comprising the same |
| TWI764064B (zh) * | 2014-03-13 | 2022-05-11 | 日商半導體能源研究所股份有限公司 | 撓性裝置 |
| KR101693337B1 (ko) * | 2014-12-22 | 2017-01-06 | 주식회사 하이딥 | 터치 입력 장치 |
| JP6139590B2 (ja) | 2014-03-24 | 2017-05-31 | 株式会社 ハイディープHiDeep Inc. | タッチ検出方法及びこれを遂行するタッチ検出器 |
| JP2015190859A (ja) | 2014-03-28 | 2015-11-02 | ソニー株式会社 | センサ装置、入力装置及び電子機器 |
| EP3132330B1 (en) * | 2014-04-16 | 2019-07-03 | Neodrón Limited | Determining touch locations and forces thereto on a touch and force sensing surface |
| CN105980970B (zh) * | 2014-04-16 | 2019-09-03 | 信越聚合物株式会社 | 静电容量式三维传感器 |
| JP6202750B2 (ja) * | 2014-04-16 | 2017-09-27 | 信越ポリマー株式会社 | 静電容量式3次元センサ |
| US9880676B1 (en) * | 2014-06-05 | 2018-01-30 | Amazon Technologies, Inc. | Force sensitive capacitive sensors and applications thereof |
| DE102014211158A1 (de) * | 2014-06-11 | 2015-12-17 | Continental Automotive Gmbh | Tastfeld mit einer verbesserten Berührungserkennung im Randbereich |
| US9252179B2 (en) * | 2014-06-13 | 2016-02-02 | Visera Technologies Company Limited | Image sensor structures |
| JP6529523B2 (ja) * | 2014-06-23 | 2019-06-12 | マイクロソフト テクノロジー ライセンシング,エルエルシー | 容量ベースのデジタイザセンサ |
| JP6527343B2 (ja) | 2014-08-01 | 2019-06-05 | 株式会社 ハイディープHiDeep Inc. | タッチ入力装置 |
| JP6184384B2 (ja) * | 2014-09-10 | 2017-08-23 | 株式会社東芝 | 電子機器 |
| JP5845371B1 (ja) | 2014-09-19 | 2016-01-20 | 株式会社 ハイディープ | スマートフォン |
| CN106716320B (zh) | 2014-09-30 | 2020-10-30 | 苹果公司 | 用于电子设备的可配置的力敏输入结构 |
| KR102307532B1 (ko) * | 2014-12-24 | 2021-09-29 | 엘지디스플레이 주식회사 | 터치 패널 일체형 유기발광 표시장치 |
| US9958973B2 (en) * | 2014-10-24 | 2018-05-01 | Lg Display Co., Ltd. | Touch panel and touch panel-integrated organic light emitting display device |
| JP6257088B2 (ja) * | 2014-10-31 | 2018-01-10 | 信越ポリマー株式会社 | 静電容量式3次元センサ及びその製造方法 |
| EP3220238B1 (en) * | 2014-11-14 | 2020-01-01 | Sony Corporation | Input device, keyboard, and electronic device |
| KR102239861B1 (ko) | 2014-11-26 | 2021-04-13 | 삼성디스플레이 주식회사 | 터치 센서를 포함하는 표시 장치 및 그 구동 방법 |
| JP2016115178A (ja) * | 2014-12-16 | 2016-06-23 | 信越ポリマー株式会社 | 可撓性積層体及びその製造方法、静電容量式3次元センサ |
| DE102015100344A1 (de) * | 2015-01-12 | 2016-07-14 | Emporia Telecom Gmbh & Co Kg | Tastatur, Hülle und mobiles Endgerät mit einer solchen Tastatur sowie Ladestation für ein mobiles Endgerät |
| WO2016125215A1 (ja) * | 2015-02-06 | 2016-08-11 | ソニー株式会社 | 情報処理装置、入力装置、情報処理装置の制御方法、入力装置の制御方法及びプログラム |
| JP6256369B2 (ja) | 2015-02-09 | 2018-01-10 | ソニー株式会社 | センサ、入力装置、キーボードおよび電子機器 |
| KR101598412B1 (ko) * | 2015-02-11 | 2016-02-29 | 주식회사 하이딥 | 전극 시트 및 터치 입력 장치 |
| KR102319464B1 (ko) * | 2015-03-16 | 2021-10-29 | 삼성디스플레이 주식회사 | 터치 장치 및 이를 포함하는 표시 장치 |
| JP2016173683A (ja) * | 2015-03-16 | 2016-09-29 | シャープ株式会社 | 電子機器、電子機器の入力検出方法、及び制御プログラム |
| CN105988635A (zh) * | 2015-03-20 | 2016-10-05 | 禾瑞亚科技股份有限公司 | 压力感测触控面板、压力感测方法、电子装置及控制单元 |
| KR101652029B1 (ko) * | 2015-04-13 | 2016-08-30 | 주식회사 하이딥 | 압력 검출 모듈 및 이를 포함하는 스마트폰 |
| JP6890372B2 (ja) * | 2015-06-08 | 2021-06-18 | アルプスアルパイン株式会社 | 車載入力装置 |
| KR101719208B1 (ko) * | 2015-06-17 | 2017-03-23 | 주식회사 하이딥 | 디스플레이 모듈을 포함하는 압력 검출 가능한 터치 입력 장치 |
| KR101583221B1 (ko) * | 2015-06-17 | 2016-01-07 | 주식회사 하이딥 | 압력 검출을 위한 전극시트 및 이를 포함하는 압력 검출 모듈 |
| WO2016204568A1 (ko) * | 2015-06-18 | 2016-12-22 | 삼성전자 주식회사 | 입력장치를 구비한 전자장치 |
| CN105068602B (zh) * | 2015-07-27 | 2018-10-30 | 业成光电(深圳)有限公司 | 电子装置 |
| CN105068702B (zh) * | 2015-07-27 | 2018-05-01 | 业成光电(深圳)有限公司 | 电子装置 |
| KR101583765B1 (ko) * | 2015-07-27 | 2016-01-08 | 주식회사 하이딥 | 스마트폰 |
| KR20170020725A (ko) * | 2015-07-29 | 2017-02-24 | 주식회사 하이딥 | 압력 전극이 형성된 디스플레이 모듈을 포함하는 터치 입력 장치 및 압력 전극 형성 방법 |
| WO2017019887A1 (en) * | 2015-07-29 | 2017-02-02 | The Board Of Trustees Of The Leland Stanford Junior University | Methods and apparatus concerning sensitive force sensors |
| US20170052616A1 (en) * | 2015-08-18 | 2017-02-23 | Apple Inc. | Electronic Device Having Force Sensor Air Flow Promotion Structures |
| KR101656755B1 (ko) * | 2015-09-02 | 2016-09-12 | 주식회사 하이딥 | 전극시트 및 터치 입력 장치 |
| CN105094493B (zh) * | 2015-09-06 | 2017-12-08 | 京东方科技集团股份有限公司 | 一种触控基板及其制备方法、显示装置 |
| KR102361247B1 (ko) | 2015-09-08 | 2022-02-11 | 엘지디스플레이 주식회사 | 인-셀 터치 타입 디스플레이 장치, 터치회로, 디스플레이 드라이버 및 인-셀 터치 타입 디스플레이 장치 구동방법 |
| KR101727263B1 (ko) * | 2015-09-09 | 2017-04-26 | 주식회사 하이딥 | 디스플레이 모듈을 포함하는 터치 압력 검출 가능한 터치 입력 장치 |
| CN107847164B (zh) * | 2015-09-29 | 2021-01-08 | 苹果公司 | 压力测量设计 |
| TWI649686B (zh) | 2015-09-30 | 2019-02-01 | 美商蘋果公司 | 具有適應性輸入列之鍵盤 |
| US10409412B1 (en) | 2015-09-30 | 2019-09-10 | Apple Inc. | Multi-input element for electronic device |
| CN105203244B (zh) * | 2015-10-20 | 2017-08-25 | 浙江大学 | 一种具有不规则表面微突的电子皮肤及其制备方法 |
| US10908742B2 (en) * | 2015-10-21 | 2021-02-02 | Microsoft Technology Licensing, Llc | Device with grooves in conductive casing |
| CN205302239U (zh) * | 2015-10-29 | 2016-06-08 | 深圳市汇顶科技股份有限公司 | 一种压力检测结构及触摸设备 |
| CN205121517U (zh) * | 2015-10-29 | 2016-03-30 | 深圳市汇顶科技股份有限公司 | 压力检测结构和终端设备 |
| US10649572B2 (en) | 2015-11-03 | 2020-05-12 | Microsoft Technology Licensing, Llc | Multi-modal sensing surface |
| US10955977B2 (en) * | 2015-11-03 | 2021-03-23 | Microsoft Technology Licensing, Llc | Extender object for multi-modal sensing |
| US10338753B2 (en) | 2015-11-03 | 2019-07-02 | Microsoft Technology Licensing, Llc | Flexible multi-layer sensing surface |
| KR101679622B1 (ko) * | 2015-12-21 | 2016-12-06 | 주식회사 하이딥 | 터치 입력 장치 |
| GB2544353B (en) * | 2015-12-23 | 2018-02-21 | Cambridge Touch Tech Ltd | Pressure-sensitive touch panel |
| KR101634315B1 (ko) * | 2015-12-29 | 2016-06-30 | 주식회사 하이딥 | 터치 입력 장치 |
| CN105511683B (zh) * | 2015-12-31 | 2019-03-12 | 厦门天马微电子有限公司 | 一种触控显示装置 |
| CN105589603A (zh) * | 2016-02-18 | 2016-05-18 | 厦门天马微电子有限公司 | 触控结构、触控显示面板、触控显示装置 |
| KR101800798B1 (ko) | 2016-02-19 | 2017-11-29 | 엘지디스플레이 주식회사 | 구동 회로, 터치 디스플레이 장치 및 그 구동방법 |
| CN206848977U (zh) * | 2016-02-19 | 2018-01-05 | 苹果公司 | 一种电子设备以及用于电子设备的电容式力传感器 |
| CN105677112B (zh) * | 2016-02-24 | 2019-01-18 | 上海天马微电子有限公司 | 触控显示面板和触控显示装置 |
| CN105511689B (zh) | 2016-02-25 | 2017-10-10 | 京东方科技集团股份有限公司 | 一种触控显示面板、显示装置及其驱动方法 |
| US10180755B2 (en) | 2016-02-29 | 2019-01-15 | Apple Inc. | Electronic device with dynamic thresholding for force detection |
| CN105610424B (zh) * | 2016-03-07 | 2020-10-30 | 广东美的厨房电器制造有限公司 | 家用电器的电容式按键结构及家用电器 |
| KR101811414B1 (ko) * | 2016-03-16 | 2017-12-21 | 주식회사 하이딥 | 터치 입력 장치 |
| KR101761361B1 (ko) * | 2016-04-04 | 2017-07-25 | 엘지디스플레이 주식회사 | 터치 디스플레이 장치, 백 라이트 유닛 |
| ITUA20163990A1 (it) * | 2016-05-31 | 2017-12-01 | St Microelectronics Srl | Dispositivo sensore di carico miniaturizzato con ridotta sensibilita' a stress termo-meccanico di incapsulamento, in particolare sensore di forza e di pressione |
| CN106055155B (zh) * | 2016-06-01 | 2020-05-22 | 厦门天马微电子有限公司 | 集成压力感应显示面板和电子设备 |
| CN106092430B (zh) * | 2016-06-16 | 2018-11-16 | 清华大学深圳研究生院 | 一种梳齿电容式压力传感器 |
| US10634734B2 (en) * | 2016-07-15 | 2020-04-28 | Tdk Corporation | Sensor unit |
| CN106249944B (zh) * | 2016-07-22 | 2019-03-19 | 京东方科技集团股份有限公司 | 触控面板及其制作方法、驱动方法、触控显示装置 |
| KR102517515B1 (ko) * | 2016-07-29 | 2023-04-04 | 삼성전자주식회사 | 입력 감지 패널을 구비한 전자 장치 |
| US10318065B2 (en) | 2016-08-03 | 2019-06-11 | Apple Inc. | Input device having a dimensionally configurable input area |
| JP6863385B2 (ja) * | 2016-09-13 | 2021-04-21 | ソニーグループ株式会社 | センサ、バンド、電子機器および腕時計型電子機器 |
| CN109690269B (zh) * | 2016-09-14 | 2022-04-29 | 索尼公司 | 传感器、输入装置和电子设备 |
| US10871860B1 (en) | 2016-09-19 | 2020-12-22 | Apple Inc. | Flexible sensor configured to detect user inputs |
| CN109791457B (zh) * | 2016-09-28 | 2023-04-28 | 索尼公司 | 传感装置和电子设备 |
| TWI627381B (zh) * | 2016-10-21 | 2018-06-21 | 台灣艾華電子工業股份有限公司 | 彎曲感測器 |
| US20180307345A1 (en) * | 2016-10-31 | 2018-10-25 | Tactus Technology, Inc. | System for detecting inputs into a computing device |
| CN108020156B (zh) * | 2016-11-04 | 2020-08-11 | 台湾艾华电子工业股份有限公司 | 弯曲传感器 |
| KR102626773B1 (ko) | 2016-11-09 | 2024-01-19 | 삼성전자주식회사 | 디스플레이 장치 및 이의 제어 방법 |
| KR101958324B1 (ko) * | 2016-11-24 | 2019-03-15 | 주식회사 하이딥 | 터치 입력 장치 |
| KR101763206B1 (ko) * | 2016-11-24 | 2017-07-31 | 주식회사 하이딥 | 터치 입력 장치 |
| CN110557963B (zh) | 2016-11-24 | 2023-04-07 | 希迪普公司 | 可检测适用显示噪声补偿的压力的触摸输入装置 |
| CN106547408B (zh) * | 2016-12-06 | 2019-09-17 | 厦门天马微电子有限公司 | 一种显示装置 |
| KR102386132B1 (ko) | 2017-03-30 | 2022-04-13 | 엘지전자 주식회사 | 전자장치 |
| TWI612456B (zh) * | 2017-06-13 | 2018-01-21 | 友達光電股份有限公司 | 感測元件與具有感測元件的電子裝置 |
| TWI635430B (zh) * | 2017-06-15 | 2018-09-11 | 禾瑞亞科技股份有限公司 | Pressure sensing touch device |
| JP2019011982A (ja) * | 2017-06-29 | 2019-01-24 | 住友理工株式会社 | センサシート、静電容量型センサ、およびセンサシートの製造方法 |
| KR102360850B1 (ko) * | 2017-06-30 | 2022-02-10 | 삼성디스플레이 주식회사 | 터치 센서 및 이를 포함하는 표시 장치 |
| US10732743B2 (en) | 2017-07-18 | 2020-08-04 | Apple Inc. | Concealable input region for an electronic device having microperforations |
| KR101960708B1 (ko) * | 2017-07-25 | 2019-03-22 | 주식회사 하이딥 | 터치 입력 장치 |
| SG11202001053WA (en) * | 2017-08-11 | 2020-03-30 | Razer Asia Pacific Pte Ltd | Height extension of analog stick |
| US10732676B2 (en) | 2017-09-06 | 2020-08-04 | Apple Inc. | Illuminated device enclosure with dynamic trackpad |
| KR102375093B1 (ko) * | 2017-10-31 | 2022-03-15 | 엘지디스플레이 주식회사 | 스트레쳐블 터치 표시 장치 |
| JP6854743B2 (ja) * | 2017-11-15 | 2021-04-07 | 株式会社ジャパンディスプレイ | 表示装置 |
| JP6773008B2 (ja) * | 2017-11-15 | 2020-10-21 | オムロン株式会社 | 静電容量式圧力センサ |
| KR102510459B1 (ko) * | 2017-12-12 | 2023-03-17 | 삼성디스플레이 주식회사 | 표시 장치 |
| JP6875982B2 (ja) * | 2017-12-15 | 2021-05-26 | 信越ポリマー株式会社 | 感圧静電スイッチ |
| JP2021105519A (ja) * | 2018-03-09 | 2021-07-26 | 株式会社村田製作所 | 圧力センサ |
| CN108534921B (zh) * | 2018-03-26 | 2021-01-26 | 京东方科技集团股份有限公司 | 压力传感器、显示装置 |
| US11592941B2 (en) * | 2018-03-30 | 2023-02-28 | Sony Corporation | Input apparatus and electronic equipment |
| US10686105B2 (en) * | 2018-06-18 | 2020-06-16 | Advanced Semiconductor Engineering, Inc. | Optical package device |
| US20210278293A1 (en) * | 2018-06-28 | 2021-09-09 | Sony Corporation | Sensor, input apparatus, and electronic device |
| US10990229B2 (en) * | 2018-08-03 | 2021-04-27 | Apple Inc. | Rectangular touch node design for metal mesh on-cell technology |
| CN110874151B (zh) * | 2018-08-31 | 2024-01-02 | 技嘉科技股份有限公司 | 电子装置 |
| TWI668602B (zh) * | 2018-08-31 | 2019-08-11 | 技嘉科技股份有限公司 | 電子裝置 |
| US11851319B2 (en) * | 2018-09-20 | 2023-12-26 | Stmicroelectronics S.R.L. | High-range semiconductor load sensor device |
| JP7355029B2 (ja) * | 2018-10-19 | 2023-10-03 | ソニーグループ株式会社 | センサ、積層型センサよび電子機器 |
| WO2020097730A1 (en) * | 2018-11-16 | 2020-05-22 | The University Of British Columbia | Deformable sensor for simulating skin and other applications |
| KR102124625B1 (ko) * | 2019-03-15 | 2020-06-18 | 주식회사 하이딥 | 터치 입력 장치 |
| JP7229095B2 (ja) * | 2019-05-16 | 2023-02-27 | Cyberdyne株式会社 | 触力覚検知装置、触力覚検知方法およびロボットアーム |
| KR102184886B1 (ko) * | 2019-06-26 | 2020-12-01 | 한솔테크닉스 (주) | 압력 센서 |
| US11366558B2 (en) | 2019-07-26 | 2022-06-21 | Apple Inc. | Metal mesh touch electrodes with visibility mitigations |
| CN114222904A (zh) * | 2019-08-27 | 2022-03-22 | 松下知识产权经营株式会社 | 负荷传感器 |
| JP7379034B2 (ja) * | 2019-09-13 | 2023-11-14 | 株式会社東海理化電機製作所 | 入力装置及び制御装置 |
| WO2021158038A1 (en) | 2020-02-04 | 2021-08-12 | Samsung Electronics Co., Ltd. | A method and a flexible apparatus managing a folding thereof |
| KR102245679B1 (ko) * | 2020-07-09 | 2021-04-29 | 주식회사 하이딥 | 압력 전극이 형성된 디스플레이 모듈을 포함하는 터치 입력 장치 및 압력 전극 형성 방법 |
| US11592940B2 (en) | 2020-09-09 | 2023-02-28 | E Ink Holdings Inc. | Touch display apparatus, stylus and sensing method of stylus |
| JP2022108974A (ja) * | 2021-01-14 | 2022-07-27 | 本田技研工業株式会社 | 静電容量型センサおよび計測装置 |
| JP2022190516A (ja) | 2021-06-14 | 2022-12-26 | 双葉電子工業株式会社 | 静電容量型圧力センサ |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20030052867A1 (en) * | 2001-09-20 | 2003-03-20 | Alps Electric Co., Ltd. | Capacitive input device |
| CN1472521A (zh) * | 2002-07-12 | 2004-02-04 | ������������ʽ���� | 静电电容式传感器 |
| CN101341460A (zh) * | 2005-12-22 | 2009-01-07 | 皇家飞利浦电子股份有限公司 | 用于用户互动的方法和器件 |
| CN101446869A (zh) * | 2007-11-29 | 2009-06-03 | 索尼株式会社 | 压力检测传感器、输入装置和电子设备 |
| US20100033443A1 (en) * | 2008-08-06 | 2010-02-11 | Hitachi Displays, Ltd. | Display device |
| CN101989003A (zh) * | 2009-07-31 | 2011-03-23 | 群康科技(深圳)有限公司 | 触控液晶显示装置 |
| CN102053750A (zh) * | 2009-11-06 | 2011-05-11 | 索尼公司 | 传感装置和电子装置 |
| CN102103445A (zh) * | 2009-12-22 | 2011-06-22 | 索尼公司 | 传感器装置及信息处理装置 |
| CN201955733U (zh) * | 2010-11-22 | 2011-08-31 | 智点科技(深圳)有限公司 | 一种触控键盘 |
| CN102313820A (zh) * | 2010-05-26 | 2012-01-11 | 精工爱普生株式会社 | 元件结构体、惯性传感器以及电子设备 |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04125722A (ja) * | 1990-09-18 | 1992-04-27 | Fujitsu Ltd | タッチパネル付ディスプレイ |
| US7030860B1 (en) * | 1999-10-08 | 2006-04-18 | Synaptics Incorporated | Flexible transparent touch sensing system for electronic devices |
| JP3628972B2 (ja) * | 2001-03-14 | 2005-03-16 | ニッタ株式会社 | 静電容量式センサ |
| JP2003280821A (ja) * | 2002-03-26 | 2003-10-02 | Matsushita Electric Ind Co Ltd | 光透過性タッチパネル |
| JP3983638B2 (ja) * | 2002-09-24 | 2007-09-26 | ニッタ株式会社 | センサシート |
| JP4622590B2 (ja) * | 2005-03-08 | 2011-02-02 | ソニー株式会社 | 入力装置、タッチパネル及び電子機器 |
| US7509884B2 (en) * | 2007-02-01 | 2009-03-31 | Nitta Corporation | Sensor sheet |
| US20080202251A1 (en) * | 2007-02-27 | 2008-08-28 | Iee International Electronics & Engineering S.A. | Capacitive pressure sensor |
| TW200947045A (en) * | 2008-03-26 | 2009-11-16 | Kyocera Corp | Touch panel and touch panel display device |
| JP5345336B2 (ja) * | 2008-04-15 | 2013-11-20 | 株式会社ジャパンディスプレイ | 入力装置、及びそれを備えた表示装置 |
| JP5123774B2 (ja) * | 2008-07-25 | 2013-01-23 | 株式会社ジャパンディスプレイイースト | 入力装置、及びそれを備えた表示装置 |
| JP5044834B2 (ja) * | 2008-07-29 | 2012-10-10 | 株式会社ジャパンディスプレイウェスト | 情報入力装置、及び情報入出力装置 |
| US20100102830A1 (en) * | 2008-10-27 | 2010-04-29 | Microchip Technology Incorporated | Physical Force Capacitive Touch Sensor |
| JP5396335B2 (ja) * | 2009-05-28 | 2014-01-22 | 株式会社半導体エネルギー研究所 | タッチパネル |
| CN201438247U (zh) * | 2009-06-19 | 2010-04-14 | 台均科技(深圳)有限公司 | 液晶面板和液晶显示器 |
| JP2011081578A (ja) * | 2009-10-07 | 2011-04-21 | Hitachi Displays Ltd | 表示装置 |
| JP5346769B2 (ja) * | 2009-10-21 | 2013-11-20 | 株式会社ジャパンディスプレイ | タッチパネル及びそれを備えた表示装置 |
| EP2494430B1 (en) * | 2009-10-27 | 2019-06-26 | Microsoft Technology Licensing, LLC | Projected capacitive touch sensing |
| US8599150B2 (en) * | 2009-10-29 | 2013-12-03 | Atmel Corporation | Touchscreen electrode configuration |
| JP2011100215A (ja) * | 2009-11-04 | 2011-05-19 | Seiko Instruments Inc | 座標入力装置及び情報機器 |
| JP5413235B2 (ja) | 2010-02-19 | 2014-02-12 | ソニー株式会社 | センサ装置及び情報処理装置 |
| JP5382658B2 (ja) * | 2010-02-26 | 2014-01-08 | 株式会社ジャパンディスプレイ | タッチセンサ付き表示装置、タッチパネル、タッチパネルの駆動方法、および電子機器 |
| KR20140145117A (ko) * | 2012-03-09 | 2014-12-22 | 소니 주식회사 | 센서 장치, 입력 장치 및 전자 기기 |
| JP2013218518A (ja) * | 2012-04-09 | 2013-10-24 | Panasonic Corp | タッチパネル |
-
2013
- 2013-01-25 KR KR1020147024117A patent/KR20140145117A/ko not_active Application Discontinuation
- 2013-01-25 EP EP13758637.6A patent/EP2824549B1/en active Active
- 2013-01-25 CN CN201710659974.4A patent/CN107505067B/zh active Active
- 2013-01-25 JP JP2014503433A patent/JP6107811B2/ja active Active
- 2013-01-25 CN CN201380012202.1A patent/CN104145240B/zh active Active
- 2013-01-25 RU RU2014135546A patent/RU2014135546A/ru unknown
- 2013-01-25 IN IN7355DEN2014 patent/IN2014DN07355A/en unknown
- 2013-01-25 WO PCT/JP2013/000380 patent/WO2013132736A1/ja active Application Filing
- 2013-03-01 TW TW102107375A patent/TW201347006A/zh unknown
- 2013-03-06 US US13/787,309 patent/US9201105B2/en active Active
-
2017
- 2017-01-17 JP JP2017006105A patent/JP6347292B2/ja not_active Expired - Fee Related
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20030052867A1 (en) * | 2001-09-20 | 2003-03-20 | Alps Electric Co., Ltd. | Capacitive input device |
| CN1472521A (zh) * | 2002-07-12 | 2004-02-04 | ������������ʽ���� | 静电电容式传感器 |
| CN101341460A (zh) * | 2005-12-22 | 2009-01-07 | 皇家飞利浦电子股份有限公司 | 用于用户互动的方法和器件 |
| CN101446869A (zh) * | 2007-11-29 | 2009-06-03 | 索尼株式会社 | 压力检测传感器、输入装置和电子设备 |
| US20100033443A1 (en) * | 2008-08-06 | 2010-02-11 | Hitachi Displays, Ltd. | Display device |
| CN101989003A (zh) * | 2009-07-31 | 2011-03-23 | 群康科技(深圳)有限公司 | 触控液晶显示装置 |
| CN102053750A (zh) * | 2009-11-06 | 2011-05-11 | 索尼公司 | 传感装置和电子装置 |
| CN102103445A (zh) * | 2009-12-22 | 2011-06-22 | 索尼公司 | 传感器装置及信息处理装置 |
| CN102313820A (zh) * | 2010-05-26 | 2012-01-11 | 精工爱普生株式会社 | 元件结构体、惯性传感器以及电子设备 |
| CN201955733U (zh) * | 2010-11-22 | 2011-08-31 | 智点科技(深圳)有限公司 | 一种触控键盘 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN104145240B (zh) | 2017-08-29 |
| US20130234734A1 (en) | 2013-09-12 |
| JPWO2013132736A1 (ja) | 2015-07-30 |
| TW201347006A (zh) | 2013-11-16 |
| JP6107811B2 (ja) | 2017-04-05 |
| RU2014135546A (ru) | 2016-03-27 |
| EP2824549A4 (en) | 2015-08-05 |
| EP2824549A1 (en) | 2015-01-14 |
| WO2013132736A1 (ja) | 2013-09-12 |
| IN2014DN07355A (zh) | 2015-04-24 |
| CN104145240A (zh) | 2014-11-12 |
| CN107505067A (zh) | 2017-12-22 |
| JP2017073175A (ja) | 2017-04-13 |
| EP2824549B1 (en) | 2019-08-07 |
| KR20140145117A (ko) | 2014-12-22 |
| US9201105B2 (en) | 2015-12-01 |
| JP6347292B2 (ja) | 2018-06-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107505067B (zh) | 传感器设备、输入设备和电子装置 | |
| US10282041B2 (en) | Sensor device, input device, and electronic apparatus | |
| KR102358388B1 (ko) | 터치 위치와 가압력을 검출하기 위한 용량 센서 | |
| US10394339B2 (en) | Sensor, input device, keyboard, and electronic device | |
| CN102141852B (zh) | 触摸面板和包含其的电子设备 | |
| EP2983067B1 (en) | Input device and electronic apparatus | |
| WO2014147943A1 (ja) | センサ装置、入力装置および電子機器 | |
| US20090231305A1 (en) | Force Imaging Input Device and System | |
| KR20150123868A (ko) | 국부적인 힘 센싱을 위한 디바이스 및 방법 | |
| JP6635042B2 (ja) | 入力装置、センサ、キーボードおよび電子機器 | |
| JP2009087311A (ja) | 入力装置 | |
| US20140049703A1 (en) | Pen writing on one-dimensional capacitive touch sensor | |
| WO2016075901A1 (ja) | 入力装置、キーボードおよび電子機器 | |
| US9696576B2 (en) | Pen writing on one-dimensional capacitive touch sensor | |
| US10627297B2 (en) | Input device pressing unit | |
| JP2009058445A (ja) | 触覚センサ | |
| KR20110124089A (ko) | 정전용량식 입력장치 | |
| CN109478114A (zh) | 传感器和电子设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |