WO2017111135A1 - 走行支援装置及び走行支援方法 - Google Patents
走行支援装置及び走行支援方法 Download PDFInfo
- Publication number
- WO2017111135A1 WO2017111135A1 PCT/JP2016/088578 JP2016088578W WO2017111135A1 WO 2017111135 A1 WO2017111135 A1 WO 2017111135A1 JP 2016088578 W JP2016088578 W JP 2016088578W WO 2017111135 A1 WO2017111135 A1 WO 2017111135A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- target
- collision prediction
- vehicle
- collision
- area
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 15
- 238000001514 detection method Methods 0.000 claims abstract description 83
- 238000012937 correction Methods 0.000 description 41
- 238000003384 imaging method Methods 0.000 description 24
- 230000008569 process Effects 0.000 description 9
- 238000010586 diagram Methods 0.000 description 8
- 230000014509 gene expression Effects 0.000 description 8
- 230000008859 change Effects 0.000 description 6
- 230000004927 fusion Effects 0.000 description 6
- 230000006870 function Effects 0.000 description 5
- 238000012545 processing Methods 0.000 description 5
- 238000013459 approach Methods 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000002360 preparation method Methods 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 230000006399 behavior Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000000605 extraction Methods 0.000 description 2
- 230000000295 complement effect Effects 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
Images






Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0953—Predicting travel path or likelihood of collision the prediction being responsive to vehicle dynamic parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/0097—Predicting future conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/58—Velocity or trajectory determination systems; Sense-of-movement determination systems
- G01S13/589—Velocity or trajectory determination systems; Sense-of-movement determination systems measuring the velocity vector
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/86—Combinations of radar systems with non-radar systems, e.g. sonar, direction finder
- G01S13/867—Combination of radar systems with cameras
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/165—Anti-collision systems for passive traffic, e.g. including static obstacles, trees
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo or light sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B60W2420/408—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/93185—Controlling the brakes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9327—Sensor installation details
- G01S2013/93271—Sensor installation details in the front of the vehicles
Definitions
- a vehicle is provided with a driving support device that avoids a collision accident caused by a target entering from the lateral direction toward the course of the vehicle.
- a driving support device for example, in Patent Document 1
- the lateral movement speed at which an object approaches from the lateral direction toward the vehicle path is equal to or higher than a predetermined speed, and the distance between the object and the vehicle is equal to or lower than a predetermined distance.
- the detection area for detecting an object is expanded. Since this detection area is within a range where both the camera and the radar can detect an object, an object moving in the lateral direction can be detected with high accuracy.
- the width of the collision prediction area in the direction of the lateral position axis is set based on the width of the vehicle, and the lateral position of the collision prediction area is determined by the speed of the target calculated by the speed calculation unit. Are set based on the predicted collision time.
- a collision with the target is predicted by including at least a part of a range between both ends of the target detected by the both-end detection unit in the collision prediction area.
- FIG. 7 is a diagram illustrating an example of correcting a collision prediction area
- FIG. 8 is a diagram illustrating an example of correcting a collision prediction area
- FIG. 9 is a graph showing a change tendency of the correction coefficient used when correcting the collision prediction region
- FIG. 10 is a diagram illustrating an example of correcting a collision prediction region.
- the driving support device 100 includes a detection ECU (Electronic Control Unit) 10, a radar device 21, and an imaging device 22.
- the radar device 21 is, for example, a known millimeter-wave radar that uses a millimeter-wave band high-frequency signal as a transmission wave.
- the radar device 21 is provided at the front end of the host vehicle and can detect a target within a predetermined detection angle.
- the detection range is used, and the position of a target (referred to as a radar detection target) within the detection range is detected.
- an exploration wave is transmitted at a predetermined period, and a reflected wave is received by a plurality of antennas.
- the distance from the radar detection target is calculated from the transmission time of the exploration wave and the reception time of the reflected wave.
- the relative speed (specifically, the relative speed in the traveling direction of the vehicle) is calculated based on the frequency of the reflected wave reflected by the radar detection target that has changed due to the Doppler effect.
- the azimuth of the radar detection target is calculated from the phase difference of the reflected waves received by the plurality of antennas. If the position and orientation of the radar detection target can be calculated, the relative position (lateral position) of the radar detection target with respect to the host vehicle can be specified. Therefore, the radar device 21 corresponds to a target detection unit and a velocity calculation unit. The radar device 21 performs transmission of the exploration wave, reception of the reflected wave, calculation of the reflection position and relative velocity at predetermined intervals, and transmits the calculated reflection position and relative velocity to the detection ECU 10.
- step S110 the relative position, relative distance, and relative speed of the target determined as the same target are acquired from the radar device 21.
- the relative position of the target is specified based on the position and orientation of the target with respect to the host vehicle, and corresponds to the lateral position of the target on the determination plane.
- the relative distance corresponds to the distance between the host vehicle and the target calculated based on the relative position.
- position information on both ends of the target is acquired from the image photographed by the imaging device 22.
- step S ⁇ b> 120 the collision prediction time calculation unit 17 calculates the target collision prediction time from the relative speed and relative distance of the target acquired from the radar device 21.
- step S130 based on the target information acquired in steps S110 and S120, the collision prediction unit 15 constructs a collision prediction area on the determination plane.
Abstract
走行支援装置(100)は、物標検出部(21,22)と、衝突予測部(10(15))と、支援実施部(10(16))と、速度算出部(21,22)と、衝突予測時間算出部(10(17))と、両端検出部(21,22)と、を備える。衝突予測部(15)は、車両の進行方向に直交する横方向における車両に対する位置を表す横位置軸と、車両の進行方向に設定した衝突予測時間を表す予測時間軸とで規定される判定平面を使用する。具体的には、衝突予測部(15)は、その判定平面における領域として衝突予測領域を構築する。さらに、衝突予測部(15)は、その判定平面において衝突予測領域に物標の両端の間の範囲の少なくとも一部が含まれるか否かを判定する。さらに、衝突予測部(15)はその判定に基づいて、物標との衝突を予測する。横位置軸の方向における衝突予測領域の幅は、車両の幅に基づいて設定される。衝突予測領域の横位置は、物標の速度と、衝突予測時間とに基づいて設定される。
Description
本出願は、2015年12月25日に出願された日本出願番号2015-254446号に基づくもので、ここにその記載内容を援用する。
本開示は、車両に搭載され、車両の前方に存在する物標(物体)を検出して、車両により走行支援を実施させる走行支援装置及び走行支援方法に関する。
近年、センサやデータ処理の高度化に伴って、車両の進路に向かって横方向から物標が進入することで生じる衝突事故を未然に回避する走行支援装置を車両に搭載することが行われつつある。この走行支援装置として、例えば、特許文献1では、物体が車両の進路に向かって横方向から接近してくる横移動速度が所定速度以上であり、かつ物体と車両との距離が所定距離以下である場合には、物体を検出するための検出領域を拡張する。この検出領域は、カメラとレーダとの両方が物体を検出できる範囲内であるため、横方向に移動する物体を高精度に検出できる。
このように、特許文献1に記載の走行支援装置では、車両の進路に向かって物体が横方向から接近してくる場合に、その物体の距離と速度に応じて検出領域を拡大することで、横方向から車両の進路に接近する物体を検出している。しかし、車両の進路に向かって接近する物体の横幅が大きい場合、物体の位置として用いられる物体の中心位置と物体が存在する範囲とがずれ、適切な走行支援を実施できないおそれがある。
本開示は、その主たる目的は、車両の進路に向かって接近する物標の横幅が大きい場合でも、精度高く車両と物標との衝突を判定することができる走行支援装置及び走行支援方法を提供することにある。
本開示の第一の態様においては、走行支援装置であって、車両の進行方向に対して交差する方向に移動する物標を検出する物標検出部と、前記物標検出部により検出された前記物標と前記車両とが衝突することを予測する衝突予測部と、前記衝突予測部により前記物標と前記車両とが衝突すると予測された場合に、前記車両により衝突を抑制する走行支援を実施させる支援実施部と、前記物標の速度を算出する速度算出部と、前記物標検出部により検出された前記物標の情報に基づいて、前記物標と前記車両とが衝突するまでの予測時間である衝突予測時間を算出する衝突予測時間算出部と、前記物標検出部により検出された前記物標の、前記車両の進行方向に直交する方向の両端を検出する両端検出部と、を備え、前記衝突予測部は、前記車両の進行方向に直交する横方向における前記車両に対する位置を表す横位置軸と、前記車両の進行方向に設定した前記衝突予測時間を表す予測時間軸とで規定される判定平面における領域として衝突予測領域を構築し、前記判定平面において前記衝突予測領域に、前記両端検出部により検出された前記両端の間の範囲の少なくとも一部が含まれるか否かで、前記物標との衝突を予測し、前記横位置軸の方向における前記衝突予測領域の幅は、前記車両の幅に基づいて設定され、前記衝突予測領域の前記横位置は、前記速度算出部により算出される前記物標の速度と、前記衝突予測時間とに基づいて設定される。
物標検出部により車両の進行方向に対して交差する方向に移動する物標が検出された場合には、両端検出部により車両の進行方向に対して直交する方向の物標の両端が検出される。そして、車両の進行方向に直交する横方向における物標と車両との相対位置である横位置と、衝突予測時間とから衝突予測領域が構築される。この衝突予測領域について、その横位置軸方向の幅は車両の幅に基づいて設定される。これにより、横位置軸方向の幅を超える位置に存在する物標は、車両と衝突するおそれが少ないと判定することができる。また、物標の速度と衝突予測時間とに基づいて衝突予測領域の横位置が設定されることで、その速度の物標が車両と衝突する可能性が高いのか否かを精度高く予測することができる。さらに、その衝突予測領域内に両端検出部により検出された物標の両端の間の範囲の少なくとも一部が含まれることで、物標との衝突が予測される。これにより、車両の進路に向かって接近する物標の横幅が大きい場合でも、精度高く車両と物標との衝突を判定することができ、ひいては走行支援の実施の有無を適切に判断することが可能となる。
本開示についての上記目的及びその他の目的、特徴や利点は、添付の図面を参照しながら下記の詳細な記述により、より明確になる。その図面は、
図1(a),(b)は、本実施形態に係る走行支援装置のハードウェアを示すブロック図、検出ECUの機能ブロック図であり、
図2は、従来の検出ECUによる制御で生じるおそれのある問題を示す図であり、
図3は、本実施形態に係る検出ECUが実施する制御を示す図であり、
図4は、本実施形態に係る検出ECUが実施する制御フローチャートであり、
図5は、衝突予測領域を補正する場合の一例を示す図であり、
図6は、衝突予測領域を補正する際に用いる補正値の変化傾向を示すグラフであり、
図7は、衝突予測領域を補正する場合の一例を示す図であり、
図8は、衝突予測領域を補正する場合の一例を示す図であり、
図9は、衝突予測領域を補正する際に用いる補正係数の変化傾向を示すグラフであり、
図10は、衝突予測領域を補正する場合の一例を示す図である。
本実施形態に係る走行支援装置は、車両(自車両)に搭載され、自車両の進行方向前方等の周囲に存在する物標を検知し、走行支援制御を実施する。この走行支援制御は、物標との衝突を回避すべく、若しくは衝突被害を軽減すべく制御を行うPCSシステム(Pre-crash safety system)として機能する。
図1(a)において、走行支援装置100は、検出ECU(Electronic Control Unit)10、レーダ装置21、及び撮像装置22を備えて構成されている。
レーダ装置21は、例えば、ミリ波帯の高周波信号を送信波とする公知のミリ波レーダであり、自車両の前端部に設けられ、所定の検知角に入る領域を、物標を検知可能な検知範囲とし、検知範囲内の物標(レーダ検出物標と呼称)の位置を検出する。具体的には、所定周期で探査波を送信し、複数のアンテナにより反射波を受信する。この探査波の送信時刻と反射波の受信時刻とにより、レーダ検出物標との距離を算出する。また、レーダ検出物標に反射された反射波の、ドップラー効果により変化した周波数により、相対速度(詳しくは車両の進行方向における相対速度)を算出する。加えて、複数のアンテナが受信した反射波の位相差により、レーダ検出物標の方位を算出する。なお、レーダ検出物標の位置及び方位が算出できれば、そのレーダ検出物標の、自車両に対する相対位置(横位置)を特定することができる。よって、レーダ装置21は、物標検出部及び速度算出部に該当する。レーダ装置21は、所定周期毎に、探査波の送信、反射波の受信、反射位置及び相対速度の算出を行い、算出した反射位置と相対速度とを検出ECU10に送信する。
撮像装置22は、例えばCCD(Charged-Coupled Device)カメラ、CMOS(Complementary Metal-Oxide Semiconductor)イメージセンサ、近赤外線カメラ等で構成されている。この場合、撮像装置22は、自車両の車幅方向中央の所定高さに取り付けられることで、自車両前方へ向けて所定角度範囲で広がる領域を俯瞰視点から撮像する。撮像装置22は、撮像した画像における、物標(画像検出物標と呼称)の存在を示す特徴点を抽出する。具体的には、撮像した画像の輝度情報に基づきエッジ点を抽出し、抽出したエッジ点に対してハフ変換を行う。ハフ変換では、例えば、エッジ点が複数個連続して並ぶ直線上の点や、直線どうしが直交する点が特徴点として抽出される。撮像装置22は、所定周期毎に、撮像及び特徴点の抽出を行い、特徴点の抽出結果を検出ECU10に送信する。なお、撮像装置22は、単眼カメラであってもよく、ステレオカメラであってもよい。このようにレーダ装置21及び撮像装置22は、は、自車両の進行方向に対して交差する方向に移動する物標を検出する。
検出ECU10には、レーダ装置21と撮像装置22とが接続されている。検出ECU10は、CPU(Central Processing Unit)11、RAM(Random Access Memory)12、ROM(Read Only Memory)13、I/O(Input/Output)(図示せず)等を備えたコンピュータである。この検出ECU10は、CPU11が、ROM13にインストールされているプログラムを実施することでこれら各機能を実現する。本実施形態において、ROM13にインストールされているプログラムは判定プログラムであり、レーダ検出物標の情報と画像検出物標の情報とに基づいて、それぞれの物標が同一の物標を示しているのか否かを判定する。
具体的には、レーダ検出物標から得られる位置であるレーダ検出物標位置と、画像検出物標から得られる特徴点である画像検出物標位置とについて、近傍に位置するものを、同じ物標に基づくものであるとして対応付ける。レーダ検出物標位置の近傍に、画像検出物標位置が存在する場合(本実施形態においては、レーダ検出物標位置と画像検出物標位置との物標間距離が所定範囲内に収まる場合)、そのレーダ検出物標位置に実際に物標が存在する可能性が高い。このレーダ装置21及び撮像装置22により物標の位置が精度よく取得できている状態を、フュージョン状態と称する。フュージョン状態であると判定した物標については、その位置に物標が存在していると判定する。
また、ROM13にインストールされている判定プログラムは、その位置に物標が存在していると判定した場合に、その物標との衝突に備え規定の走行支援処理を実施すべきか否かを判定する。ROM13は、非遷移的実体的記録媒体に相当する。記録媒体には、ROM13以外に例えば、DVD-ROM(Digital Versatile Disk Read Only Memory)、CD-ROM(Compact Disc Read Only Memory)、ハードディスク等のコンピュータ読み取り可能な電子媒体を含む。検出ECU10は、図1(b)に示すように衝突予測部15、支援実施部16、及び衝突予測時間算出部17による各種機能を実行する。
本実施形態において、走行支援処理とは、自車両前方に衝突するおそれのある物標が存在することをドライバに報知する警報処理と自車両を制動させる制動処理に該当する。したがって、自車両には、検出ECU10からの制御指令により駆動する安全装置30として、警報装置31及びブレーキ装置32が備えられている。
警報装置31は、自車両の車室内に設置されたスピーカやディスプレイである。検出ECU10は、後述の衝突予測時間(TTC:Time-to-collision)が第一所定時間よりも縮まり、物標に自車両が衝突する可能性が高まったと判定した場合には、その検出ECU10からの制御指令により、警報装置31は警報音や警報メッセージ等を出力してドライバに衝突の危険を報知する。このため、警報装置31は報知部に該当する。
ブレーキ装置32は、自車両を制動する制動装置である。検出ECU10は、後述の衝突予測時間が第一所定時間よりも短く設定された第二所定時間よりも縮まり、物標に自車両が衝突する可能性が高まったと判定した場合には、その検出ECU10からの制御指令により、ブレーキ装置32が作動する。具体的には、ドライバによるブレーキ操作に対する制動力をより強くしたり(ブレーキアシスト機能)、ドライバによりブレーキ操作が行われてなければ自動制動を行ったりする(自動ブレーキ機能)。よって、ブレーキ装置32は自動制動部に該当する。
ところで、検出ECU10の衝突予測時間算出部17は、物標が自車両と衝突するまでの時間である衝突予測時間を算出する。具体的には、自車両と物標との相対距離及び相対速度に基づいて、衝突予測時間を算出する。そして、図2に示すように、この衝突予測時間(TTC)が縦軸で、自車両の進行方向に直交する横方向(交差する方向)における自車両に対する位置を表す横位置が横軸で規定される判定平面において、レーダ装置21が物標を検出可能な領域と撮像装置22が物標を検出可能な領域とで重複している領域を重複検出領域として構築する。
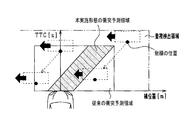
ただし、重複検出領域に存在する物標全てが自車両と衝突するおそれのある物標である訳ではない。したがって、重複検出領域を更に限定するように設定された衝突予測領域内に収まる物標を自車両と衝突するおそれがあるとして認識する。判定平面において、物標を横位置と衝突予測時間とで点(現在位置)として特定し、矩形の枠で示すように、横位置と衝突予測時間のそれぞれに閾値を設けることで構築された従来の衝突予測領域内に収まる物標を自車両と衝突すると判定することが考えられる。しかし、自車両と衝突する可能性が高い領域は、ハッチングした領域で示すように、上記衝突予測領域よりも狭い範囲である。このため、物標が自車両に接触する事無く自車両の進路を横切る場合や、自車両の進路に物標が進入する前に物標の進路を自車両が通り抜ける場合でも、その衝突予測領域内に物標が収まり、それにより物標と自車両とが衝突しないにも関わらず走行支援処理を実施させるおそれがある。
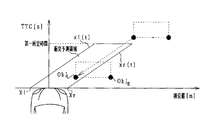
よって、本実施形態における検出ECU10の衝突予測部15では、衝突予測領域の横位置を、重複検出領域内に存在する物標の速度と衝突予測時間とに基づいて設定する。具体的には、図3に示すように、衝突予測領域の横軸方向における幅を自車両の幅に、そして縦軸方向における範囲を0から第一所定時間までと設定した衝突予測領域を構築する。このとき、時刻tにおける物標の横位置軸方向(右方向を正とする)の速度をV(t)、衝突予測時間をTTCとすると、衝突予測領域の右端Xr(t)及び左端Xl(t)は、(1)式及び(2)式により表される。なお、式中に記載の自車両前方右端Xrは、自車両の中心から車幅の半分の幅だけ横位置軸方向に右側の点の座標位置であり、自車両前方左端Xlは、自車両の中心から車幅の半分の幅だけ横位置軸方向に左側の点の座標位置である。これにより、自車両とすれ違う物標は衝突予測領域に含まれないように設定することができるとともに、衝突予測領域内に存在する物標は自車両と衝突する可能性があるとして、走行支援処理を実施させることで物標と自車両との衝突を抑制する事ができる。
Xr(t)=Xr-V(t)×TTC…(1)
Xl(t)=Xl-V(t)×TTC…(2)
本実施形態では、物標が自転車である場合を想定している。自転車は、横位置軸方向における幅の長い物標である。このため、状況次第では、判定平面において自転車の横位置軸方向の中央部が衝突予測領域内に含まれることなく、自転車の一部が衝突予測領域内に進入することが有りうる(図2参照)。このような状況では、判定平面において、物標である自転車を横位置と衝突予測時間とで点として特定する場合、走行支援処理を適切に実施できず、物標と自車両が衝突するおそれがある。
これに備え、撮像装置22により撮影された画像から、判定平面において横軸方向における物標の両端の位置情報を取得する。したがって、本実施形態において、撮像装置22は両端検出部に該当する。図3に示すように、取得した両端の間の範囲の内、少なくともその一部が衝突予測領域に含まれた場合に、物標が車両と衝突するおそれがあるとして、その物標を走行支援処理の実施判定対象と認識する。
具体的には、車両の進行方向に対して、物標の左端の横位置情報(物標左端ObjL)と物標の右端の横位置情報(物標右端ObjR)とを撮像装置22により撮影された画像から取得する。また、(1)式により算出される物標の衝突予測時間時における衝突予測領域の右端Xr(t)と、(2)式により算出される物標の衝突予測時間時における衝突予測領域の左端Xl(t)と、を算出する。そして、(3)式に記載されるように、判定平面において、算出された衝突予測時間時における衝突予測領域の左端Xl(t)の横位置よりも物標右端ObjRの横位置が大きく、且つ物標左端ObjLの横位置よりも算出された衝突予測時間時における衝突予測領域の右端Xr(t)の横位置の方が大きい関係であるか否かを判定する。この(3)式の関係を満たす物標は、衝突予測領域内に物標の少なくとも一部が含まれていることになる。つまり、車両の進路に向かって接近する物標の横幅が長い場合でも、精度高く車両と物標との衝突を判定することが可能となる。

本実施形態では、検出ECU10の支援実施部16により後述する図4に示す走行支援制御を実施する。支援実施部16は、衝突予測部15により物標と車両とが衝突すると予測された場合に、車両により衝突を抑制する走行支援を実施させる。図4に示す走行支援制御は、検出ECU10が電源オンしている期間中に検出ECU10によって所定周期で繰り返し実施される。
まず、ステップS100では、重複検出領域内にてレーダ検出物標と画像検出物標との物標間距離が所定範囲内に収まるか否かを判定する。重複検出領域内にてレーダ検出物標と画像検出物標との物標間距離が所定範囲内に収まらない場合には(S100:NO)、本制御を終了する。重複検出領域内にてレーダ検出物標と画像検出物標との物標間距離が所定範囲内に収まる場合には(S100:YES)、同一物標を検出したとして、ステップS110に進む。
ステップS110では、レーダ装置21から同一物標と判定した物標の相対位置と相対距離、そして相対速度を取得する。このとき、物標の相対位置とは、自車両に対する物標の位置及び方位に基づいて特定されるものであり、判定平面における物標の横位置に相当する。また、相対距離とは、相対位置に基づいて算出される自車両と物標との距離に相当する。また、撮像装置22により撮影された画像から物標の両端の位置情報を取得する。ステップS120では、衝突予測時間算出部17がレーダ装置21から取得した物標の相対速度と相対距離とから物標の衝突予測時間を算出する。そして、ステップS130では、ステップS110及びステップS120にて取得した物標の情報に基づいて、衝突予測部15が判定平面において衝突予測領域を構築する。
ステップS140では、ステップS130にて構築された衝突予測領域に物標の少なくとも一部が含まれるか否かを判定する。衝突予測領域に物標が含まれないと判定した場合には(S140:NO)、本制御を終了する。衝突予測領域に物標の少なくとも一部が含まれると判定した場合には(S140:YES)、ステップS150に進み、支援実施部16が警報装置31による報知処理を実施させる。
ステップS160では、物標の衝突予測時間が第二所定時間よりも短いか否かを判定する。物標の衝突予測時間が図7に示す第二所定時間よりも長いと判定した場合には(S160:NO)、本制御を終了する。物標の衝突予測時間が第二所定時間よりも短いと判定した場合には(S160:YES)、ステップS170に進み、支援実施部16がブレーキ装置32による自動制動制御を実施させ、本制御を終了する。
上記構成により、本実施形態は、以下の効果を奏する。
・衝突予測領域について、その横位置軸方向の幅は自車両の幅に基づいて設定される。これにより、横位置軸方向の幅を超える位置に存在する物標は、自車両と衝突するおそれが少ないと判定することができる。また、物標の速度と衝突予測時間とに基づいて衝突予測領域の横位置が設定されることで、その速度の物標が自車両と衝突する可能性が高いのか否かを精度高く予測することができる。さらに、(1)式及び(2)式に基づいて算出される物標の衝突予測時間時における衝突予測時間の右端Xr(t)及び左端Xl(t)と、物標の両端のそれぞれの横位置(物標左端ObjL及び物標右端ObjR)と、が(3)式を満たす関係であることで、少なくとも物標の一部が自車両と衝突することが予測される。これにより、自車両の進路に向かって接近する物標の横幅が大きい場合でも、精度高く自車両と物標との衝突を判定することができ、ひいては走行支援の実施の有無を適切に判断することが可能となる。
・衝突予測領域の横位置が、(1)式及び(2)式に記載されるように物標の速度を傾きとする直線で設定される。したがって、判定平面において、(1)式により求められる衝突予測領域の右端Xr(t)の仮想線と、(2)式により求められる衝突予測領域の左端Xl(t)の仮想線と、をひくことができる。これらの仮想線は、その速度で走行する物標が自車両に衝突する場合の境界線であるため、これらの仮想線に基づいて衝突予測領域を構築することで、自車両と衝突することなくすり抜ける物標を衝突予測領域外とすることが可能となる。
上記実施形態を、以下のように変更して実施することもできる。
・上記実施形態では、物標を自転車と想定していた。このことについて、自転車に限らず、例えば、歩行者、バイク、自動車などが想定されてもよい。
・上記実施形態では、自車両と衝突予測領域内に存在する物標の衝突予測時間に応じて、物標との衝突を抑制するための手段を講じていた。具体的には、衝突予測領域内に少なくとも物標の一部が存在する場合に、警報装置31を作動させ、衝突予測領域内に存在する物標の衝突予測時間が第二所定時間よりも短い場合にブレーキ装置32を作動させていた。このことについて、物標との衝突を抑制するための手段は警報装置31及びブレーキ装置32に限らない。例えば、ブレーキ装置32による自動制動制御に代わって、ハンドル制御部を設け、衝突予測領域内に存在する物標の衝突予測時間が第三所定時間よりも短いと判定した場合に、物標との衝突を避けるようにハンドルを自動制御してもよい。この第三所定時間は、例えばハンドルの自動制御による物標との衝突回避を安全に実施するために必要な時間として設定される。
・上記実施形態では、レーダ装置21及び撮像装置22を用いてフュージョン判定を実施していた。このことについて、本走行支援制御を実施する上で、必ずしもフュージョン判定を行う必要はなく、例えば、撮像装置22を備えず、レーダ装置21のみを備える走行支援装置が本走行支援制御を実施してもよい。この場合、レーダ装置21に判定平面における物標の両端の位置情報を取得させる。よって、本別例では、レーダ装置21が両端検出部に該当する。
[別例1]上記実施形態では、レーダ装置21及び撮像装置22を用いてフュージョン判定を実施していた。このことについて、本走行支援制御を実施する上で、必ずしもフュージョン判定を行う必要はなく、例えば、撮像装置22を備え、レーダ装置21を備えていない走行支援装置が本走行支援制御を実施してもよい。この場合、撮像装置22により撮影された画像から物標の位置及び物標の速度を検出させる。したがって、別例1では、撮像装置22が速度算出部に該当する。
ただし、撮像装置22により撮影された画像から物標の速度を検出する場合には、物標が自車両近くに存在することで撮影された画像の多くを物標が占めることになり、算出される物標の速度が小さくなる方向に誤差が生じるおそれがある。この場合、本来は衝突予測領域内に物標が含まれているはずが、物標の速度に誤差が生じることで衝突予測領域内に物標が含まれないと判定される事態が起こりうる。
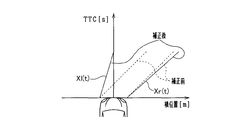
よって、自車両と物標との相対距離が第一所定距離よりも短い場合には、図5に示すように、衝突予測部15が衝突予測領域を横方向へ広げるように、衝突予測領域の右端Xr(t)の直線の傾きが大きく、そして衝突予測領域の左端Xl(t)の直線の傾きが小さくなるように補正する。具体的には、(4)式に記載されるように、物標の速度及び衝突予測時間の積と、1に第一補正値αを加えた値と、を掛けることで衝突予測領域の右端Xr(t)の直線の傾きを補正する。また、(5)式に記載されるように、物標の速度及び衝突予測時間の積と、1から第一補正値を引くことで算出される値と、を掛けることで衝突予測領域の左端Xl(t)の直線の傾きを補正する。第一補正値αは、図6(a)に示すように、相対距離が第一所定距離よりも長い場合には0であり、第一所定距離よりも短くなるほど値が0よりも大きくなる傾向を持つ。これにより、撮像装置22により撮影された画像を用いて算出した物標の速度に誤差が生じた場合でも、衝突予測領域内に物標を収めることができる。なお、衝突予測領域の右端Xr(t)の直線の傾きを補正した。
Xr(t)=Xr-V(t)×TTC×(1+α)…(4)
Xl(t)=Xl-V(t)×TTC×(1-α)…(5)
別例1では、衝突予測領域の右端Xr(t)の直線の傾きと衝突予測領域の左端Xl(t)の直線の傾きとを、それぞれ補正していた。このことについて、必ずしも両方の直線の傾きを、第一補正値αを用いて補正する必要はない。例えば、衝突予測領域の右端Xr(t)の直線の傾きを補正する際には第一補正値αを用いて、衝突予測領域を横方向へ広がるように補正する。その一方で、衝突予測領域の左端Xl(t)の直線の傾きは補正しなくてもよいし、第一補正値αとは異なる値を用いて衝突予測領域の左端Xl(t)の直線の傾きを補正してもよい。
[別例2]上記実施形態では、衝突予測領域の横軸方向における幅を自車両の幅に設定していた。このことについて、衝突予測領域のうち衝突予測時間が第四所定時間よりも大きい範囲では、図7に示すように、衝突予測部15が衝突予測領域の右端Xr(t)の直線の傾きが小さくなるように、そして衝突予測領域の左端Xl(t)の直線の傾きが大きくなるように補正することで、衝突予測領域の横軸方向における幅を狭める。なお、第四所定時間は第二所定時間よりも大きく第一所定時間よりも小さく設定される。具体的には、(6)式に記載されるように、1から第二補正値βを引くことで算出される値と、物標の速度及び衝突予測時間の積とを掛けることで、衝突予測領域の右端Xr(t)の直線の傾きを補正する。また、(7)式に記載されるように、1に第二補正値βを加算することで算出される値と、物標の速度及び衝突予測時間の積とを掛けることで、衝突予測領域の左端Xl(t)の直線の傾きを補正する。第二補正値βは、図6(b)に示すように衝突予測時間が第四所定時間よりも小さい場合には0であり、第四所定時間よりも大きくなるほど値が0よりも大きくなる傾向を持つ。
Xr(t)=Xr-V(t)×TTC×(1-β)…(6)
Xl(t)=Xl-V(t)×TTC×(1+β)…(7)
衝突予測時間が第四所定時間よりも大きい範囲にて検出される物標は、自車両と衝突するまでに時間があり、物標又は自車両が今後加減速することが予測される。したがって、現在は、物標と自車両とが衝突する軌跡であっても、今後物標と自車両とが衝突しない軌跡に変化する可能性がある。したがって、衝突予測領域の横軸方向における幅を狭めるように、(6)式及び(7)式に準じてそれぞれの直線の傾きが補正されることで、自車両と衝突する可能性が特に高い物標のみが検出される。これにより、物標又は自車両の加減速で衝突予測領域からすぐに外れる物標について走行支援の実施判定を行わずにすみ、ひいては走行支援制御の実施頻度を低減する事が出来る。
別例2では、衝突予測領域の右端Xr(t)の直線の傾きと衝突予測領域の左端Xl(t)の直線の傾きとを、それぞれ補正していた。このことについて、必ずしも両方の直線の傾きを、第二補正値βを用いて補正する必要はない。例えば、衝突予測領域の右端Xr(t)の直線の傾きを補正する際には第二補正値βを用いて、衝突予測領域の横軸方向における幅を狭めるように補正する。その一方で、衝突予測領域の左端Xl(t)の直線の傾きは補正しなくてもよいし、第二補正値βとは異なる値を用いて衝突予測領域の左端Xl(t)の直線の傾きを補正してもよい。
[別例3]上記実施形態では、衝突予測領域の横軸方向における幅を自車両の幅に設定していた。このことについて、判定平面における横位置軸方向の物標の速度が第一所定速度よりも低い場合、特に物標が歩行者である場合には、その物標の速度が頻繁に加減速を実施することが想定される。この場合、衝突予測領域から物標が外れすり抜けることが予測された場合でも、物標の不慮の加減速により物標と自車両とが将来的に衝突する軌跡に変わることで、衝突予測領域内に物標が進入するおそれがある。このような状況に備え、物標の速度が第一所定速度よりも低い場合には、図8に示すように、衝突予測部15が衝突予測領域の横幅を両方向に拡大するように補正する。具体的には、(8)式及び(9)式に記載されるように、自車両前方右端Xr及び自車両前方左端Xlのそれぞれに第一補正係数γを掛けることで、衝突予測領域の横幅を補正する。第一補正係数γは、図9(a)に示すように、物標の速度の絶対値が第一所定速度よりも高い場合には1であり、第一所定速度よりも低くなるほど値が1よりも大きくなる傾向を持つ。これにより、物標の挙動に変化が生じやすい状況においても、物標と自車両との衝突を精度高く予測することが可能となる。
Xr(t)=Xr×γ―V(t)×TTC…(8)
Xl(t)=Xl×γ―V(t)×TTC…(9)
別例3について、物標の速度が第一所定速度よりも低い場合に、横位置軸の方向における衝突予測領域の幅を拡大補正するとともに、衝突予測領域を横方向へ広げるように(4)式及び(5)式に準じてそれぞれの直線の傾きを補正することで、衝突予測領域をさらに拡大してもよい。直線の傾きを補正する事について、その具体的な補正方法を述べる。(4)式に準じて、物標の速度及び衝突予測時間の積と、1に第三補正値Δを加えた値と、を掛けることで衝突予測領域の右端Xr(t)の直線の傾きを補正する。また、(5)式に準じて、物標の速度及び衝突予測時間の積と、1から第三補正値Δを引くことで算出される値と、を掛けることで、衝突予測領域の左端Xl(t)の直線の傾きを補正する。第三補正値Δは、図6(c)に示すように、物標の速度が第一所定速度よりも高い場合には0であり、第一所定速度よりも低くなるほど値が0よりも大きくなる傾向を持つ。これによっても、物標の挙動に変化が生じやすい状況において、より確実に物標と自車両との衝突を精度高く予測することが可能となる。
別例3では、物標の速度が第一所定速度よりも低い場合に、衝突予測部15が横位置軸の方向における衝突予測領域の幅を拡大補正していた。このことについて、横位置軸の方向における衝突予測領域の幅を拡大補正する代わりに、衝突予測領域を横方向へ広げるように(4)式及び(5)式に準じてそれぞれの直線の傾きを補正することで、衝突予測領域を拡大してもよい。
別例3では、物標の速度が第一所定速度よりも低い場合に、横位置軸の方向における衝突予測領域の幅を拡大補正していた。このことについて、物標と自車両との相対距離が第二所定距離よりも大きい場合に、衝突予測部15が横位置軸の方向における衝突予測領域の幅を拡大補正してもよい。具体的には、(8)式及び(9)式に準じて、自車両前方右端Xr及び自車両前方左端Xlのそれぞれに第二補正係数εを掛けることで、衝突予測領域の横幅を補正する。第二補正係数εは、図9(b)に示すように、相対距離が第二所定距離よりも短い場合には1であり、第二所定距離よりも長くなるほど値が1よりも大きくなる傾向を持つ。
物標と自車両とが離れている場合、レーダ装置21により検出される物標の情報の確度が低くなる。よって、本来は衝突予測領域内に物標が含まれているはずが、物標の情報に誤差が生じることで、衝突予測領域内に物標が含まれないと判定される事態が起こりうる。したがって、物標と自車両との相対距離が第二所定距離よりも大きい場合には、横位置軸の方向における衝突予測領域の幅が拡大補正される。これにより、レーダ装置21により検出される物標の情報に誤差が生じた場合でも、拡大補正された衝突予測領域内に物標を収めることができる。
別例3では、物標の速度が第一所定速度よりも低い場合に、横位置軸の方向における衝突予測領域の幅を拡大補正していた。このことについて、物標と自車両との相対速度が第二所定速度よりも低い場合に、衝突予測部15が衝突予測領域を横方向へ広げるように(4)式及び(5)式に準じてそれぞれの直線の傾きを補正してもよい。具体的には、(4)式に準じて、物標の速度及び衝突予測時間の積と、1に第四補正値ζを加えた値と、を掛けることで衝突予測領域の右端Xr(t)の直線の傾きを補正する。また、(5)式に準じて、物標の速度及び衝突予測時間の積と、1から第四補正値ζを引くことで算出される値と、を掛けることで衝突予測領域の左端Xl(t)の直線の傾きを補正する。第四補正値ζは、図6(d)に示すように、相対速度が第二所定速度よりも高い場合には0であり、第二所定速度よりも低くなるほど値が0よりも大きくなる傾向を持つ。
自車両と物標との相対速度が小さい場合には、衝突予測時間の誤差が生じるおそれがある。この場合、判定平面における物標の位置がずれるため、本来は衝突予測領域内に物標が含まれているはずが、算出された衝突予測時間に誤差が生じることで、衝突予測領域内に物標が含まれないと判定される事態が起こりうる。したがって、自車両と物標との相対速度が第二所定速度よりも低い場合には、衝突予測部15が衝突予測領域を横方向へ広げるように(4)式及び(5)式に準じて、それぞれの直線の傾きが補正される。これにより、自車両と物標との相対速度が低い状況で、算出される衝突予測時間に誤差が生じた場合でも、拡大補正した衝突予測領域内に物標を収めることができる。
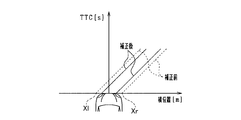
別例3では、物標の速度が第一所定速度よりも低い場合に、横位置軸の方向における衝突予測領域の幅を拡大補正していた。このことについて、自車両の旋回角速度を検出する手段(例えばヨーレートセンサ)を走行支援装置100が備えている場合には、旋回角速度と自車両の速度とに基づいて算出される曲率半径(カーブR)の大きさに応じて、横位置軸の方向における衝突予測領域の幅を補正してもよい。カーブRが所定半径よりも短い場合、図10に示すように、衝突予測部15が衝突予測領域の横幅を両方向から縮小するように補正する。具体的には、(8)式及び(9)式に準じて、自車両前方右端Xr及び自車両前方左端Xlのそれぞれに第三補正係数ηを掛けることで、衝突予測領域の横幅を補正する。
第三補正係数ηは、図9(c)に示すように、カーブRが所定半径よりも長い場合には1であり、所定半径よりも短くなるほど値が1よりも小さくなる傾向を持つ。
第三補正係数ηは、図9(c)に示すように、カーブRが所定半径よりも長い場合には1であり、所定半径よりも短くなるほど値が1よりも小さくなる傾向を持つ。
カーブRが所定半径よりも短く、自車両の旋回前の進行方向に対して自車両が大きく旋回している場合、自車両と物標との相対位置の変化が大きくなる。この場合、衝突予測領域を適切に展開することができず、ブレーキ装置32による自動制動制御を誤って実施させるおそれがある。よって、カーブRが所定半径よりも短い場合に、横位置軸方向における衝突予測領域の幅が縮小補正されることで、ブレーキ装置32による自動制動制御の誤実施を抑制する事が可能となる。
別例3及び別例3に適用される別例について、自車両前方右端Xr及び自車両前方左端Xlに同じ値の補正係数を掛けることで、衝突予測領域の横幅を補正していた。このことについて、必ずしも自車両前方右端Xrと自車両前方左端Xlとの両者に対して同じ値の補正係数をかける必要はない。例えば、自車両前方右端Xrに補正係数を掛ける一方で、自車両前方左端Xlに補正係数を掛けなくてもよいし、あるいは、自車両前方左端Xlに自車両前方右端Xrを補正する際に用いた補正係数とは異なる値を掛けてもよい。
別例3に適用される別例では、衝突予測領域の右端Xr(t)の直線の傾きと衝突予測領域の左端Xl(t)の直線の傾きとを、それぞれ同じ値の補正値を用いて補正していた。このことについて、必ずしも両方の直線の傾きを同じ値の補正値を用いて補正する必要はない。例えば、衝突予測領域の右端Xr(t)の直線の傾きを補正する際には第三補正値Δ又は第四補正値ζを用いて、衝突予測領域を横方向へ広がるように補正する。その一方で、衝突予測領域の左端Xl(t)の直線の傾きは補正しなくてもよいし、第三補正値Δ又は第四補正値ζとは異なる値を用いて衝突予測領域の左端Xl(t)の直線の傾きを補正してもよい。
別例1、別例1に適用される別例、別例2、別例2に適用される別例、別例3、及び別例3に適用される別例では、予め設定される条件に応じて衝突予測領域の範囲を補正していた。この衝突予測領域は、警報装置31により報知処理が実施される報知領域とブレーキ装置32により自動制動制御が実施される自動制動領域とが二つ合わさった領域である。したがって、別例1、別例1に適用される別例、別例2、別例2に適用される別例、別例3、及び別例3に適用される別例に記載の補正制御は、報知領域及び自動制動領域の両方に適用されるものとなっている。このことについて、例えば報知領域には別例1に記載の補正制御を適用し、自動制動領域には別例2に記載の補正制御を適用するなど、報知領域と自動制動領域とで別々の補正制御を適用してもよい。
本開示は、実施例に準拠して記述されたが、本開示は当該実施例や構造に限定されるものではないと理解される。本開示は、様々な変形例や均等範囲内の変形をも包含する。加えて、様々な組み合わせや形態、さらには、それらの一要素のみ、それ以上、あるいはそれ以下、を含む他の組み合わせや形態をも、本開示の範疇や思想範囲に入るものである。
10…検出ECU、21…レーダ装置、22…撮像装置。
Claims (13)
- 車両の進行方向に対して交差する方向に移動する物標を検出する物標検出部(21,22)と、
前記物標検出部により検出された前記物標と前記車両とが衝突することを予測する衝突予測部(10(15))と、
前記衝突予測部により前記物標と前記車両とが衝突すると予測された場合に、前記車両により衝突を抑制する走行支援を実施させる支援実施部(10(16))と、
前記物標の速度を算出する速度算出部(21、22)と、
前記物標検出部により検出された前記物標の情報に基づいて、前記物標と前記車両とが衝突するまでの予測時間である衝突予測時間を算出する衝突予測時間算出部(10(17))と、
前記物標検出部により検出された前記物標の、前記車両の進行方向に直交する方向の両端を検出する両端検出部(21、22)と、
を備え、
前記衝突予測部は、前記車両の進行方向に直交する横方向における前記車両に対する位置を表す横位置軸と、前記車両の進行方向に設定した前記衝突予測時間を表す予測時間軸とで規定される判定平面における領域として衝突予測領域を構築し、前記判定平面において前記衝突予測領域に、前記両端検出部により検出された前記両端の間の範囲の少なくとも一部が含まれるか否かで、前記物標との衝突を予測し、
前記横位置軸の方向における前記衝突予測領域の幅は、前記車両の幅に基づいて設定され、
前記衝突予測領域の前記横位置は、前記速度算出部により算出される前記物標の速度と、前記衝突予測時間とに基づいて設定される走行支援装置。 - 前記両端検出部により検出される前記両端のうち、前記車両の進行方向に対して左側に位置する端部を左端部とし、前記車両の進行方向に対して右側に位置する端部を右端部とし、
前記車両の進行方向に対して前記横位置軸の方向における前記衝突予測領域の左端を領域左端とし、車両の進行方向に対して前記横位置軸の方向における前記衝突予測領域の右端を領域右端とし、
前記衝突予測部は、前記判定平面において前記衝突予測時間算出部により算出される前記衝突予測時間に対して、前記物標の前記左端部の横位置が前記領域右端の横位置よりも小さく、前記物標の前記右端部の横位置が前記領域左端の横位置よりも大きい場合に、前記物標との衝突を予測する請求項1に記載の走行支援装置。 - 前記衝突予測領域の前記横位置は、前記速度算出部により算出される前記物標の速度を傾きとする直線で設定される請求項1又は2に記載の走行支援装置。
- 前記衝突予測部は、前記車両と前記物標との相対距離が第一所定距離よりも小さい場合に、前記衝突予測領域を前記横方向へ広げるように前記直線の傾きを補正する請求項3に記載の走行支援装置。
- 前記衝突予測部は、前記速度算出部により算出される前記物標の速度が第一所定速度よりも低い場合に、前記衝突予測領域を前記横方向へ広げるように前記直線の傾きを補正する請求項3又は4に記載の走行支援装置。
- 前記衝突予測部は、前記車両と前記物標との相対速度が第二所定速度よりも低い場合に、前記衝突予測領域を前記横方向へ広げるように前記直線の傾きを補正する請求項3乃至5のいずれか1項に記載の走行支援装置。
- 前記衝突予測部は、前記衝突予測領域のうち前記衝突予測時間算出部により算出される前記衝突予測時間が所定時間よりも大きい範囲を、前記横方向に狭めるように前記直線の傾きを補正する請求項3乃至6のいずれか1項に記載の走行支援装置。
- 前記衝突予測部は、前記物標と前記車両との相対距離が第二所定距離よりも大きい場合に、前記横位置軸の方向における前記衝突予測領域の幅を拡大補正する請求項1乃至7のいずれか1項に記載の走行支援装置。
- 前記衝突予測部は、前記速度算出部により算出される前記物標の速度が所定速度よりも低い場合に、前記横位置軸の方向における前記衝突予測領域の幅を拡大補正する請求項1乃至8のいずれか1項に記載の走行支援装置。
- 前記衝突予測部は、前記車両が所定角度よりも大きく旋回して走行している場合に、前記横位置軸の方向における前記衝突予測領域の幅を縮小補正する請求項1乃至9のいずれか1項に記載の走行支援装置。
- 前記物標は自転車である請求項1乃至10のいずれか1項に記載の走行支援装置。
- 車両の進行方向に対して交差する方向に移動する物標を検出する物標検出ステップと、
前記物標検出ステップにより検出された前記物標と前記車両とが衝突することを予測する衝突予測ステップと、
前記衝突予測ステップにより前記物標と前記車両とが衝突すると予測された場合に、前記車両により衝突を抑制する走行支援を実施させる支援実施ステップと、
前記物標の速度を算出する速度算出ステップと、
前記物標検出ステップにより検出された前記物標の情報に基づいて、前記物標と前記車両とが衝突するまでの予測時間である衝突予測時間を算出する衝突予測時間算出ステップと、
前記物標検出ステップにより検出された前記物標の、前記車両の進行方向に直交する方向の両端を検出する両端検出ステップと、
を備え、
前記衝突予測ステップは、前記車両の進行方向に直交する横方向における前記車両に対する位置を表す横位置軸と、前記車両の進行方向に設定した前記衝突予測時間を表す予測時間軸とで規定される判定平面における領域として衝突予測領域を構築し、前記判定平面において前記衝突予測領域に、前記両端検出ステップにより検出された前記両端の間の範囲の少なくとも一部が含まれるか否かで、前記物標との衝突を予測し、
前記横位置軸の方向における前記衝突予測領域の幅は、前記車両の幅に基づいて設定され、
前記衝突予測領域の前記横位置は、前記速度算出ステップにより算出される前記物標の速度と、前記衝突予測時間とに基づいて設定される走行支援方法。 - 前記両端検出ステップにより検出される前記両端のうち、前記車両の進行方向に対して左側に位置する端部を左端部とし、前記車両の進行方向に対して右側に位置する端部を右端部とし、
前記車両の進行方向に対して前記横位置軸の方向における前記衝突予測領域の左端を領域左端とし、車両の進行方向に対して前記横位置軸の方向における前記衝突予測領域の右端を領域右端とし、
前記衝突予測ステップは、前記判定平面において前記衝突予測時間算出ステップにより算出される前記衝突予測時間に対して、前記物標の前記左端部の横位置が前記領域右端の横位置よりも小さく、前記物標の前記右端部の横位置が前記領域左端の横位置よりも大きい場合に、前記物標との衝突を予測する請求項12に記載の走行支援方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/065,460 US11069241B2 (en) | 2015-12-25 | 2016-12-22 | Driving support device and driving support method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015-254446 | 2015-12-25 | ||
| JP2015254446A JP2017117344A (ja) | 2015-12-25 | 2015-12-25 | 走行支援装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017111135A1 true WO2017111135A1 (ja) | 2017-06-29 |
Family
ID=59090687
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/088578 WO2017111135A1 (ja) | 2015-12-25 | 2016-12-22 | 走行支援装置及び走行支援方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11069241B2 (ja) |
| JP (1) | JP2017117344A (ja) |
| WO (1) | WO2017111135A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019239471A1 (ja) * | 2018-06-11 | 2019-12-19 | 三菱電機株式会社 | 運転支援装置、運転支援システムおよび運転支援方法 |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6569523B2 (ja) | 2015-12-25 | 2019-09-04 | 株式会社デンソー | 走行支援装置 |
| JP6451623B2 (ja) | 2015-12-25 | 2019-01-16 | 株式会社デンソー | 走行支援装置 |
| CN110177722B (zh) * | 2017-01-19 | 2022-07-01 | 本田技研工业株式会社 | 车辆控制系统、车辆控制方法及存储介质 |
| DE102017103097A1 (de) * | 2017-02-15 | 2018-08-16 | Konecranes Global Corporation | Automatisch geführtes Transportfahrzeug für Container und Verfahren zum Betreiben desselben sowie System mit einem automatisch geführten Transportfahrzeug |
| KR102463720B1 (ko) * | 2017-12-18 | 2022-11-07 | 현대자동차주식회사 | 차량의 경로 생성 시스템 및 방법 |
| US11001256B2 (en) | 2018-09-19 | 2021-05-11 | Zoox, Inc. | Collision prediction and avoidance for vehicles |
| JP2020160914A (ja) * | 2019-03-27 | 2020-10-01 | 株式会社豊田自動織機 | 物体検出装置 |
| DE102020112686A1 (de) * | 2019-05-14 | 2020-11-19 | Hyundai Mobis Co., Ltd. | Adaptives autonomes Notbremssystem unter Berücksichtigung des Lenkwegs und Steuerverfahren für selbiges |
| CN110435648B (zh) * | 2019-07-26 | 2021-02-26 | 中国第一汽车股份有限公司 | 车辆的行驶控制方法、装置、车辆和存储介质 |
| DE112020005275T5 (de) * | 2019-12-09 | 2022-09-15 | Mobileye Vision Technologies Ltd. | Systeme und verfahren zur selektiven verzögerung eines fahrzeugs |
| JP7301483B2 (ja) | 2020-09-28 | 2023-07-03 | ダイハツ工業株式会社 | 運転支援装置 |
| JP2023041204A (ja) * | 2021-09-13 | 2023-03-24 | 日立Astemo株式会社 | 車両制御装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1096775A (ja) * | 1996-09-24 | 1998-04-14 | Honda Access Corp | 車両の衝突警報システム |
| JP2007279892A (ja) * | 2006-04-04 | 2007-10-25 | Honda Motor Co Ltd | 衝突予知システムの制御装置、衝突予知方法および乗員保護システム |
| JP2008242544A (ja) * | 2007-03-26 | 2008-10-09 | Hitachi Ltd | 衝突回避装置および方法 |
| JP2011118753A (ja) * | 2009-12-04 | 2011-06-16 | Denso Corp | 接近報知装置、および接近報知プログラム |
| JP2012048460A (ja) * | 2010-08-26 | 2012-03-08 | Denso Corp | 走行支援装置 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4290455B2 (ja) * | 2003-03-28 | 2009-07-08 | 日産自動車株式会社 | 車両用制動制御装置 |
| JP2005032028A (ja) * | 2003-07-07 | 2005-02-03 | Ntt Power & Building Facilities Inc | 指針回転式メータの指針値読取方法、指針回転式メータの指針値読取装置及びメータ指針値読取プログラム |
| US7262710B2 (en) * | 2004-09-22 | 2007-08-28 | Nissan Motor Co., Ltd. | Collision time estimation apparatus for vehicles, collision time estimation method for vehicles, collision alarm apparatus for vehicles, and collision alarm method for vehicles |
| JP2007079892A (ja) | 2005-09-14 | 2007-03-29 | Konami Digital Entertainment:Kk | データ加工方法、データ加工装置及びプログラム |
| JP2007145152A (ja) * | 2005-11-28 | 2007-06-14 | Mitsubishi Electric Corp | 車両用自動制動装置 |
| US7881868B2 (en) * | 2007-06-12 | 2011-02-01 | Palo Alto Research Center Incorporated | Dual assessment for early collision warning |
| DE112008004069B4 (de) * | 2008-12-18 | 2014-09-04 | Toyota Jidosha Kabushiki Kaisha | Radarsystem |
| JP2011196943A (ja) | 2010-03-23 | 2011-10-06 | Denso Corp | 認識装置 |
| US9196163B2 (en) * | 2011-08-26 | 2015-11-24 | Toyota Jidosha Kabushiki Kaisha | Driving support apparatus and driving support method |
| WO2014080484A1 (ja) * | 2012-11-21 | 2014-05-30 | トヨタ自動車株式会社 | 運転支援装置、及び、運転支援方法 |
| JP5842862B2 (ja) * | 2013-05-14 | 2016-01-13 | 株式会社デンソー | 衝突緩和装置 |
| WO2014192137A1 (ja) * | 2013-05-31 | 2014-12-04 | トヨタ自動車株式会社 | 移動軌跡予測装置及び移動軌跡予測方法 |
| JP2015032028A (ja) | 2013-07-31 | 2015-02-16 | トヨタ自動車株式会社 | 運転支援装置及び運転支援方法 |
| JP6174516B2 (ja) * | 2014-04-24 | 2017-08-02 | 本田技研工業株式会社 | 衝突回避支援装置、衝突回避支援方法、及びプログラム |
| JP6183298B2 (ja) * | 2014-06-10 | 2017-08-23 | 株式会社デンソー | 衝突回避装置 |
| US9925980B2 (en) * | 2014-09-17 | 2018-03-27 | Magna Electronics Inc. | Vehicle collision avoidance system with enhanced pedestrian avoidance |
| JP6263461B2 (ja) * | 2014-09-26 | 2018-01-17 | 日立オートモティブシステムズ株式会社 | 撮像装置 |
| KR101907332B1 (ko) * | 2015-01-05 | 2018-10-11 | 닛산 지도우샤 가부시키가이샤 | 목표 차속 생성 장치 및 주행 제어 장치 |
| JP6569523B2 (ja) * | 2015-12-25 | 2019-09-04 | 株式会社デンソー | 走行支援装置 |
| JP6930350B2 (ja) * | 2017-10-02 | 2021-09-01 | トヨタ自動車株式会社 | 車両用認知支援装置 |
| JP7150245B2 (ja) * | 2018-06-01 | 2022-10-11 | マツダ株式会社 | 車両用警報システム |
-
2015
- 2015-12-25 JP JP2015254446A patent/JP2017117344A/ja active Pending
-
2016
- 2016-12-22 US US16/065,460 patent/US11069241B2/en active Active
- 2016-12-22 WO PCT/JP2016/088578 patent/WO2017111135A1/ja active Application Filing
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1096775A (ja) * | 1996-09-24 | 1998-04-14 | Honda Access Corp | 車両の衝突警報システム |
| JP2007279892A (ja) * | 2006-04-04 | 2007-10-25 | Honda Motor Co Ltd | 衝突予知システムの制御装置、衝突予知方法および乗員保護システム |
| JP2008242544A (ja) * | 2007-03-26 | 2008-10-09 | Hitachi Ltd | 衝突回避装置および方法 |
| JP2011118753A (ja) * | 2009-12-04 | 2011-06-16 | Denso Corp | 接近報知装置、および接近報知プログラム |
| JP2012048460A (ja) * | 2010-08-26 | 2012-03-08 | Denso Corp | 走行支援装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019239471A1 (ja) * | 2018-06-11 | 2019-12-19 | 三菱電機株式会社 | 運転支援装置、運転支援システムおよび運転支援方法 |
| JPWO2019239471A1 (ja) * | 2018-06-11 | 2020-07-02 | 三菱電機株式会社 | 運転支援装置、運転支援システムおよび運転支援方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20190005821A1 (en) | 2019-01-03 |
| JP2017117344A (ja) | 2017-06-29 |
| US11069241B2 (en) | 2021-07-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2017111135A1 (ja) | 走行支援装置及び走行支援方法 | |
| JP6569523B2 (ja) | 走行支援装置 | |
| JP6530705B2 (ja) | 運転支援装置及び運転支援方法 | |
| JP6561584B2 (ja) | 車両制御装置、及び車両制御方法 | |
| JP7077606B2 (ja) | 衝突判定装置 | |
| JP4531621B2 (ja) | 車両の走行安全装置 | |
| WO2018056212A1 (ja) | 物体検知装置及び物体検知方法 | |
| WO2016159288A1 (ja) | 物標存在判定方法及び装置 | |
| WO2017111147A1 (ja) | 走行支援装置及び走行支援方法 | |
| WO2017104773A1 (ja) | 移動体制御装置及び移動体制御方法 | |
| JP5910046B2 (ja) | 障害物検出装置 | |
| US9470790B2 (en) | Collision determination device and collision determination method | |
| WO2018074287A1 (ja) | 車両制御装置 | |
| JP6535194B2 (ja) | 車両制御装置、及び車両制御方法 | |
| WO2017104503A1 (ja) | 移動体制御装置及び移動体制御方法 | |
| WO2017104387A1 (ja) | 物体検知装置及び物体検知方法 | |
| JP6504078B2 (ja) | 衝突予測装置 | |
| JP2019093764A (ja) | 車両制御装置 | |
| WO2019012995A1 (ja) | 走行支援装置 | |
| JP6432538B2 (ja) | 衝突予測装置 | |
| WO2017094891A1 (ja) | 物体検出装置及び物体検出方法 | |
| JP6462610B2 (ja) | 横断判定装置 | |
| JP2023141983A (ja) | 物体認識装置及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16879021 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 16879021 Country of ref document: EP Kind code of ref document: A1 |