JP6569523B2 - 走行支援装置 - Google Patents
走行支援装置 Download PDFInfo
- Publication number
- JP6569523B2 JP6569523B2 JP2015254445A JP2015254445A JP6569523B2 JP 6569523 B2 JP6569523 B2 JP 6569523B2 JP 2015254445 A JP2015254445 A JP 2015254445A JP 2015254445 A JP2015254445 A JP 2015254445A JP 6569523 B2 JP6569523 B2 JP 6569523B2
- Authority
- JP
- Japan
- Prior art keywords
- collision prediction
- vehicle
- collision
- speed
- width
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 claims description 42
- 238000013459 approach Methods 0.000 claims description 5
- 238000012937 correction Methods 0.000 description 44
- 238000000034 method Methods 0.000 description 19
- 230000008569 process Effects 0.000 description 12
- 230000008859 change Effects 0.000 description 8
- 238000003384 imaging method Methods 0.000 description 5
- 230000001133 acceleration Effects 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000003111 delayed effect Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000012447 hatching Effects 0.000 description 1
- 230000010365 information processing Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/34—Protecting non-occupants of a vehicle, e.g. pedestrians
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/408—Radar; Laser, e.g. lidar
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Regulating Braking Force (AREA)
Description
Claims (7)
- 車両の進行方向に対して交差する方向に移動する物体を検出する物体検出部(21)と、
前記物体検出部により検出された前記物体と前記車両とが衝突することを予測する衝突予測部(10)と、
前記衝突予測部により前記物体と前記車両とが衝突すると予測された場合に、前記車両により衝突を抑制する走行支援を実施させる支援実施部(10)と、
前記物体の速度を算出する速度算出部(21)と、
前記物体検出部により検出された前記物体の情報に基づいて、前記物体と前記車両とが衝突するまでの予測時間である衝突予測時間を算出する衝突予測時間算出部(10)と、を備え、
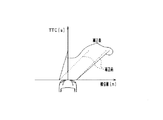
前記衝突予測部は、前記車両の進行方向に直交する横方向における前記車両に対する位置を表す横位置軸と、前記車両の進行方向に設定した前記衝突予測時間を表す予測時間軸とで規定される判定平面における領域として第一衝突予測領域を構築し、前記判定平面において前記第一衝突予測領域に前記物体が存在するか否かで、前記物体との衝突を予測し、
前記横位置軸の方向における前記第一衝突予測領域の幅は、前記車両の幅に基づいて設定され、
前記横位置軸の方向における前記第一衝突予測領域の両端は、前記横位置軸の方向において、前記速度算出部により算出される前記横位置軸の方向における前記物体の速度と、前記衝突予測時間との積だけそれぞれずらして設定されることを特徴とする走行支援装置。 - 前記衝突予測部は、前記物体検出部により検出される前記物体の横位置と前記衝突予測時間算出部により算出される前記衝突予測時間とから前記判定平面における前記物体の現在位置を設定し、前記現在位置が前記第一衝突予測領域内に収まる場合に、前記物体との衝突を予測することを特徴とする請求項1に記載の走行支援装置。
- 前記横位置軸における第一衝突予測領域の範囲は、前記横位置軸における第一衝突予測領域の範囲をX、前記車両の右端をXr、前記車両の左端をXl、前記予測時間軸における衝突予測時間をTTC、前記物体の横位置軸方向の速度をVとした場合、Xl−V×TTC≦X≦Xr−V×TTCの関係を満たすように設定されている請求項1又は2に記載の走行支援装置。
- 前記衝突予測部は、前記速度算出部により算出される前記物体の速度が所定速度よりも低い場合に、前記横位置軸の方向における前記第一衝突予測領域の幅を前記予測時間軸に応じて広げるように補正することを特徴とする請求項3に記載の走行支援装置。
- 前記衝突予測部は、前記速度算出部により算出される前記物体の速度が所定速度よりも低い場合に、前記横位置軸の方向における前記第一衝突予測領域の幅を拡大補正することを特徴とする請求項1乃至4のうちいずれか1項に記載の走行支援装置。
- 前記衝突予測部は、前記判定平面において前記衝突予測時間が所定時間よりも短く、且つ前記横位置が前記車両の幅に基づく幅よりも内側となる範囲に第二衝突予測領域を構築し、前記判定平面において前記第二衝突予測領域に前記物体が存在する場合に、前記物体との衝突を予測することを特徴とする請求項1乃至5のうちいずれか1項に記載の走行支援装置。
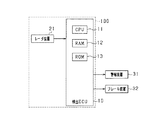
- 前記車両は、
ドライバに前記物体の接近を報知する報知部(31)と、
前記車両の自動制動を実施する自動制動部(32)と、
を備え、
前記衝突予測部は、前記横位置軸の方向における前記第一衝突予測領域の幅を両側に所定幅ずつ拡大した第三衝突予測領域を構築し、
前記支援実施部は、前記第一衝突予測領域内に収まる物体を前記自動制動部により実施される前記自動制動の実施対象とし、前記第三衝突予測領域内に収まる物体を前記報知部による前記報知の対象とすることを特徴とする請求項1乃至6のうちいずれか1項に記載の走行支援装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015254445A JP6569523B2 (ja) | 2015-12-25 | 2015-12-25 | 走行支援装置 |
| PCT/JP2016/088532 WO2017111110A1 (ja) | 2015-12-25 | 2016-12-22 | 走行支援装置及び走行支援方法 |
| US16/065,467 US10967857B2 (en) | 2015-12-25 | 2016-12-22 | Driving support device and driving support method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015254445A JP6569523B2 (ja) | 2015-12-25 | 2015-12-25 | 走行支援装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017117343A JP2017117343A (ja) | 2017-06-29 |
| JP2017117343A5 JP2017117343A5 (ja) | 2018-03-15 |
| JP6569523B2 true JP6569523B2 (ja) | 2019-09-04 |
Family
ID=59091136
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015254445A Active JP6569523B2 (ja) | 2015-12-25 | 2015-12-25 | 走行支援装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10967857B2 (ja) |
| JP (1) | JP6569523B2 (ja) |
| WO (1) | WO2017111110A1 (ja) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017117344A (ja) * | 2015-12-25 | 2017-06-29 | 株式会社デンソー | 走行支援装置 |
| DE102017103097A1 (de) * | 2017-02-15 | 2018-08-16 | Konecranes Global Corporation | Automatisch geführtes Transportfahrzeug für Container und Verfahren zum Betreiben desselben sowie System mit einem automatisch geführten Transportfahrzeug |
| JP7054327B2 (ja) | 2017-09-01 | 2022-04-13 | 株式会社デンソー | 走行支援装置 |
| JP6937218B2 (ja) * | 2017-10-19 | 2021-09-22 | 株式会社東芝 | 情報処理装置、情報処理方法、およびプログラム |
| DE102018200757A1 (de) * | 2018-01-18 | 2019-08-01 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Detektieren kritischer Querbewegungen |
| JP7106660B2 (ja) * | 2018-02-15 | 2022-07-26 | トヨタ モーター ヨーロッパ | 車両のための制御方法、コンピュータプログラム、非一時的コンピュータ読取り可能媒体、および自動化運転システム |
| US10460577B2 (en) | 2018-02-28 | 2019-10-29 | Pony Ai Inc. | Directed alert notification by autonomous-driving vehicle |
| JP7014032B2 (ja) | 2018-04-23 | 2022-02-01 | 株式会社デンソー | 車両衝突推定装置 |
| JP7245006B2 (ja) | 2018-07-05 | 2023-03-23 | 株式会社デンソー | 車両の運転支援制御装置、車両の運転支援システムおよび車両の運転支援制御方法 |
| US10824155B2 (en) * | 2018-08-22 | 2020-11-03 | Ford Global Technologies, Llc | Predicting movement intent of objects |
| JP7226011B2 (ja) * | 2019-03-27 | 2023-02-21 | トヨタ自動車株式会社 | 運転支援装置 |
| KR20230005556A (ko) * | 2021-07-01 | 2023-01-10 | 현대모비스 주식회사 | 충돌 경고 장치 및 그것을 포함하는 차량 |
| US12024162B2 (en) * | 2021-08-19 | 2024-07-02 | Aptiv Technologies AG | Automatic emergency braking for a path-crossing target |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008242544A (ja) * | 2007-03-26 | 2008-10-09 | Hitachi Ltd | 衝突回避装置および方法 |
| JP2011118753A (ja) * | 2009-12-04 | 2011-06-16 | Denso Corp | 接近報知装置、および接近報知プログラム |
| JP5387531B2 (ja) * | 2010-08-26 | 2014-01-15 | 株式会社デンソー | 走行支援装置 |
| CN103765487B (zh) * | 2011-08-26 | 2016-03-30 | 丰田自动车株式会社 | 驾驶辅助装置以及驾驶辅助方法 |
| JP6082638B2 (ja) * | 2013-03-29 | 2017-02-15 | 日立オートモティブシステムズ株式会社 | 走行制御装置及び走行制御システム |
| JP2015032028A (ja) | 2013-07-31 | 2015-02-16 | トヨタ自動車株式会社 | 運転支援装置及び運転支援方法 |
| JP6174516B2 (ja) * | 2014-04-24 | 2017-08-02 | 本田技研工業株式会社 | 衝突回避支援装置、衝突回避支援方法、及びプログラム |
| US10008118B2 (en) * | 2014-10-20 | 2018-06-26 | Robert Brandriff | Vehicle collision avoidance system and method |
| US10510256B2 (en) * | 2014-10-20 | 2019-12-17 | Robert Brandriff | Vehicle collision avoidance system and method |
| US9604641B2 (en) * | 2015-06-16 | 2017-03-28 | Honda Motor Co., Ltd. | System and method for providing vehicle collision avoidance at an intersection |
| JP2017117344A (ja) * | 2015-12-25 | 2017-06-29 | 株式会社デンソー | 走行支援装置 |
| JP6451623B2 (ja) * | 2015-12-25 | 2019-01-16 | 株式会社デンソー | 走行支援装置 |
| MX2018008919A (es) * | 2016-01-22 | 2018-09-03 | Nissan Motor | Metodo de control de asistencia de conduccion de vehiculo y dispositivo de control. |
| RU2698406C1 (ru) * | 2016-01-22 | 2019-08-26 | Ниссан Мотор Ко., Лтд. | Способ определения пешеходов и устройство определения |
| US10446033B2 (en) * | 2017-09-22 | 2019-10-15 | Ford Global Technologies, Llc | Vehicle detection and avoidance |
| US10824155B2 (en) * | 2018-08-22 | 2020-11-03 | Ford Global Technologies, Llc | Predicting movement intent of objects |
-
2015
- 2015-12-25 JP JP2015254445A patent/JP6569523B2/ja active Active
-
2016
- 2016-12-22 WO PCT/JP2016/088532 patent/WO2017111110A1/ja active Application Filing
- 2016-12-22 US US16/065,467 patent/US10967857B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017117343A (ja) | 2017-06-29 |
| US10967857B2 (en) | 2021-04-06 |
| WO2017111110A1 (ja) | 2017-06-29 |
| US20190001973A1 (en) | 2019-01-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6569523B2 (ja) | 走行支援装置 | |
| WO2017111135A1 (ja) | 走行支援装置及び走行支援方法 | |
| JP6530705B2 (ja) | 運転支援装置及び運転支援方法 | |
| CN107615356B (zh) | 车辆控制装置以及车辆控制方法 | |
| JP6451623B2 (ja) | 走行支援装置 | |
| JP5910046B2 (ja) | 障害物検出装置 | |
| JP6363558B2 (ja) | 車両制御装置、及び車両制御方法 | |
| WO2018074287A1 (ja) | 車両制御装置 | |
| US20150232073A1 (en) | Collision avoidance assistance device and collision avoidance assistance method | |
| JP6740970B2 (ja) | 走行支援装置 | |
| JP6504078B2 (ja) | 衝突予測装置 | |
| JP6561704B2 (ja) | 運転支援装置、及び運転支援方法 | |
| JP6535194B2 (ja) | 車両制御装置、及び車両制御方法 | |
| JP6432423B2 (ja) | 物体検知装置、及び物体検知方法 | |
| JP2020021179A (ja) | 運転支援装置 | |
| JP6432538B2 (ja) | 衝突予測装置 | |
| JP2017114429A (ja) | 運転支援装置及び運転支援方法 | |
| EP2916306B1 (en) | Collision avoidance assist device and collision avoidance assist method | |
| JP6432496B2 (ja) | 物体検出装置 | |
| JP6693380B2 (ja) | 車両制御装置 | |
| JP2016011088A (ja) | 車両制御装置、車両制御方法、及び、車両制御用プログラム | |
| JP6462610B2 (ja) | 横断判定装置 | |
| JP2021064096A (ja) | 衝突判定装置 | |
| WO2014037997A1 (ja) | 衝突回避支援装置及び衝突回避支援方法 | |
| WO2021070882A1 (ja) | 制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20160929 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180130 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181204 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190129 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190709 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190722 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6569523 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |