JP6561584B2 - 車両制御装置、及び車両制御方法 - Google Patents
車両制御装置、及び車両制御方法 Download PDFInfo
- Publication number
- JP6561584B2 JP6561584B2 JP2015107902A JP2015107902A JP6561584B2 JP 6561584 B2 JP6561584 B2 JP 6561584B2 JP 2015107902 A JP2015107902 A JP 2015107902A JP 2015107902 A JP2015107902 A JP 2015107902A JP 6561584 B2 JP6561584 B2 JP 6561584B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- target
- host vehicle
- regulation value
- traveling direction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0134—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to imminent contact with an obstacle, e.g. using radar systems
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/164—Centralised systems, e.g. external to vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K31/00—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator
- B60K31/0008—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator including means for detecting potential obstacles in vehicle path
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
- B60T7/22—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger initiated by contact of vehicle, e.g. bumper, with an external object, e.g. another vehicle, or by means of contactless obstacle detectors mounted on the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/02—Active or adaptive cruise control system; Distance control
- B60T2201/024—Collision mitigation systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/408—Radar; Laser, e.g. lidar
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/801—Lateral distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/802—Longitudinal distance
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/93185—Controlling the brakes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/932—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles using own vehicle data, e.g. ground speed, steering wheel direction
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- General Physics & Mathematics (AREA)
- Transportation (AREA)
- Computer Networks & Wireless Communication (AREA)
- Electromagnetism (AREA)
- Automation & Control Theory (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Traffic Control Systems (AREA)
- Radar Systems Or Details Thereof (AREA)
Description
本実施形態に係る車両制御装置は、車両(自車両)に搭載され、自車両の進行方向前方等の周囲に存在する物標を検知し、その物標との衝突を回避すべく、若しくは衝突被害を軽減すべく制御を行うPCSシステムとして機能する。
本実施形態は、全体構成は第1実施形態と共通しており、処理が一部異なっている。本実施形態では、物標情報取得部12は、物標の位置の履歴から、自車両と物標との車間距離がゼロである場合の横位置である、衝突位置を算出する。存在判定部16は、この衝突位置と規制値とを比較することにより、安全装置を作動させる必要があるか否かを判定する。
本実施形態に係る運転支援装置は、全体構成は第1実施形態と共通しており、処理が一部異なっている。規制値の拡大処理を行う場合、安全装置の不作動を抑制することができる。一方、物標が自車両の進路上に存在しない可能性が高い場合にも、規制値の拡大処理を行えば、安全装置の不要作動が起こる可能性もある。本実施形態では、安全装置の不要作動を抑制すべく、撮像装置22から取得した画像に基づいて規制値の拡大処理を行うか否かの判定を追加している。
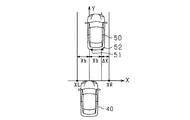
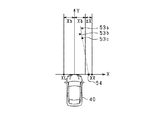
したがって、ラップ率Laが大きいほど、自車両40の幅と物標50の幅とが重複しているため、物標50において急制動等が行われた場合に、衝突の回避が困難であるといえる。一方、ラップ率Laが小さいほど、自車両40の幅と物標50の幅とが重複していないため、物標50において急制動等が行われた場合に、衝突の回避が容易であるといえる。
物標が自車両の進行方向前方を横切るように移動する場合、規制値の拡大処理を行えば、自車両の進路上を通過した物標に対しても、自車両の進路上に存在すると判定しやすくなり、安全装置の不要作動が生ずるおそれがある。
本実施形態に係る車両制御装置は、第1、2実施形態に対して、運転支援ECU10の構成が一部異なっている。図7は、本実施形態に係る運転支援ECU10の構成図である。
・各実施形態において、画像位置が自車両の進行方向の左右のいずれに位置するかに応じて、右方規制値XR及び左方規制値XLの一方に対して拡大処理を行っているが、右方規制値XR及び左方規制値XLの両方に対して拡大処理を行うものとしてもよい。画像に基づいて得られる位置は、レーダ装置21により得られる位置よりも、一般的には精度が低い。そのため、自車両また、画像位置が、自車両の進行方向に対する左右方向における中央近傍に位置する場合において、右方規制値XR及び左方規制値XLの両方に対して拡大処理を行うものとしてもよい。
Claims (13)
- 自車両(40)の進行方向前方に探査波を送信し、物標(50)により反射された反射波を受信するレーダ装置(21)からその反射波に基づく検知情報を取得する車両制御装置(10)であって、
前記検知情報に基づいて、前記自車両の進行方向における前記自車両との距離である車間距離と、前記自車両の進行方向に直交する横方向における、前記自車両との相対位置である横位置と、を取得する物標情報取得部(12)と、
前記物標が、車両であるか否かを判定する種別判定部(13)と、
前記自車両の進行方向前方において、前記横方向の幅を示す規制値を設定する規制値設定部(15)と、
前記物標の前記横位置と、前記規制値とに基づいて、前記物標が前記自車両の進路上に存在するか否かを判定する存在判定部(16)と、を備え、
前記規制値設定部は、前記物標が車両であり、且つ、前記車間距離が所定値よりも小さい場合に、前記物標が車両でない場合よりも前記規制値を拡大する拡大処理を行うことを特徴とする、車両制御装置。 - 自車両(40)の進行方向前方に探査波を送信し、物標(50)により反射された反射波を受信するレーダ装置(21)からその反射波に基づく検知情報を取得する車両制御装置(10)であって、
前記検知情報に基づいて、前記自車両の進行方向における前記自車両との距離である車間距離と、前記自車両の進行方向に直交する横方向における、前記自車両との相対位置である横位置と、前記自車両と前記物標との相対速度と、を取得する物標情報取得部(12)と、
前記物標が、車両であるか否かを判定する種別判定部(13)と、
前記相対速度と前記車間距離とにより、前記自車両と前記物標との距離がゼロになる時間である衝突時間を算出する衝突時間算出部(14)と、
前記自車両の進行方向前方において、前記横方向の幅を示す規制値を設定する規制値設定部(15)と、
前記物標の前記横位置と、前記規制値とに基づいて、前記物標が前記自車両の進路上に存在するか否かを判定する存在判定部(16)と、を備え、
前記規制値設定部は、前記物標が車両であり、且つ、前記衝突時間が所定値よりも小さい場合に、前記物標が車両でない場合よりも前記規制値を拡大する拡大処理を行うことを特徴とする、車両制御装置。 - 前記種別判定部は、自車両が備える撮像装置(22)が取得した画像に基づく位置に、前記検知情報に基づく相対位置が存在する場合に、その画像により前記物標が車両であるか否かを判定することを特徴とする、請求項1又は2に記載の車両制御装置。
- 前記物標情報取得部は、前記画像に基づく前記横方向の位置である画像位置をさらに取得し、
前記規制値設定部は、前記画像位置が前記自車両の進行方向の右側に位置する場合には、右側の前記規制値について拡大処理を行い、前記画像位置が前記自車両の進行方向の左側に位置する場合には、左側の前記規制値について拡大処理を行うことを特徴とする、請求項3に記載の車両制御装置。 - 前記物標情報取得部は、前記画像に基づき、前記横方向における、前記自車両の幅に対する前記自車両と前記物標との重複した幅の割合であるラップ率をさらに取得し、
前記規制値設定部は、前記ラップ率が所定値よりも大きい場合に前記拡大処理を行うことを特徴とする、請求項3又は4のいずれか1項に記載の車両制御装置。 - 前記規制値設定部は、前記画像位置が、自車両の幅で規定される範囲内に位置する場合に前記拡大処理を行うことを特徴とする、請求項4に記載の車両制御装置。
- 前記種別判定部は、前記レーダ装置が受信した反射波の強度により、物標が車両であるか否かを判定することを特徴とする、請求項1〜6のいずれか1項に記載の車両制御装置。
- 前記物標情報取得部は所定期間に亘って前記検知情報を取得し、複数の前記検知情報に基づいて、前記自車両と前記物標との車間距離がゼロとなる場合の前記横方向の位置を衝突位置として算出し、その衝突位置を前記横位置とすることを特徴とする、請求項1〜7のいずれか1項に記載の車両制御装置。
- 前記規制値設定部は、前記物標の現在の位置と、前記衝突位置とが、前記自車両の進行方向において左右の同じ側に位置する場合に、前記拡大処理を行うことを特徴とする、請求項8に記載の車両制御装置。
- 前記種別判定部は、前記車両が自車両と同一方向に移動する先行車両であるか否かをさらに判定し、
前記規制値設定部は、前記車両が先行車両である場合に、前記拡大処理を行うことを特徴とする、請求項1〜9のいずれか1項に記載の車両制御装置。 - 前記自車両が直進しているか否かを判定する直進判定部(50)をさらに備え、
前記規制値設定部は、前記自車両が直進していると判定した場合に、前記拡大処理を行うことを特徴とする、請求項1〜10のいずれか1項に記載の車両制御装置。 - 自車両(40)の進行方向前方に探査波を送信し、物標(50)により反射された反射波を受信するレーダ装置(21)からその反射波に基づく検知情報を取得する車両制御装置(10)により実行される車両制御方法であって、
前記検知情報に基づいて、前記自車両の進行方向における前記自車両との距離である車間距離と、前記自車両の進行方向に直交する横方向における、前記自車両との相対位置である横位置と、を取得する物標情報取得ステップと、
前記物標が、車両であるか否かを判定する種別判定ステップと、
前記自車両の進行方向前方において、前記横方向の幅を示す規制値を設定する規制値設定ステップと、
前記物標の前記横位置と、前記規制値とに基づいて、前記物標が前記自車両の進路上に存在するか否かを判定する存在判定ステップと、を実行し、
前記規制値設定ステップでは、前記物標が車両であり、且つ、前記車間距離が所定値よりも小さい場合に、前記物標が車両でない場合よりも前記規制値を拡大する拡大処理を行うことを特徴とする、車両制御方法。 - 自車両(40)の進行方向前方に探査波を送信し、物標(50)により反射された反射波を受信するレーダ装置(21)からその反射波に基づく検知情報を取得する車両制御装置(10)により実行される車両制御方法であって、
前記検知情報に基づいて、前記自車両の進行方向における前記自車両との距離である車間距離と、前記自車両の進行方向に直交する横方向における、前記自車両との相対位置である横位置と、前記自車両と前記物標との相対速度と、を取得する物標情報取得ステップと、
前記物標が、車両であるか否かを判定する種別判定ステップと、
前記相対速度と前記車間距離とにより、前記自車両と前記物標との距離がゼロになる時間である衝突時間を算出する衝突時間算出ステップと、
前記自車両の進行方向前方において、前記横方向の幅を示す規制値を設定する規制値設定ステップと、
前記物標の前記横位置と、前記規制値とに基づいて、前記物標が前記自車両の進路上に存在するか否かを判定する存在判定ステップと、を実行し、
前記規制値設定ステップでは、前記物標が車両であり、且つ、前記衝突時間が所定値よりも小さい場合に、前記物標が車両でない場合よりも前記規制値を拡大する拡大処理を行うことを特徴とする、車両制御方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015107902A JP6561584B2 (ja) | 2015-05-27 | 2015-05-27 | 車両制御装置、及び車両制御方法 |
| US15/576,537 US10672275B2 (en) | 2015-05-27 | 2016-05-11 | Vehicle control device and vehicle control method |
| PCT/JP2016/063954 WO2016190099A1 (ja) | 2015-05-27 | 2016-05-11 | 車両制御装置及び車両制御方法 |
| DE112016002387.1T DE112016002387T5 (de) | 2015-05-27 | 2016-05-11 | Fahrzeugsteuervorrichtung und fahrzeugsteuerverfahren |
| CN201680030706.XA CN107615092B (zh) | 2015-05-27 | 2016-05-11 | 车辆控制装置以及车辆控制方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015107902A JP6561584B2 (ja) | 2015-05-27 | 2015-05-27 | 車両制御装置、及び車両制御方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016223812A JP2016223812A (ja) | 2016-12-28 |
| JP2016223812A5 JP2016223812A5 (ja) | 2017-09-07 |
| JP6561584B2 true JP6561584B2 (ja) | 2019-08-21 |
Family
ID=57393841
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015107902A Active JP6561584B2 (ja) | 2015-05-27 | 2015-05-27 | 車両制御装置、及び車両制御方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10672275B2 (ja) |
| JP (1) | JP6561584B2 (ja) |
| CN (1) | CN107615092B (ja) |
| DE (1) | DE112016002387T5 (ja) |
| WO (1) | WO2016190099A1 (ja) |
Families Citing this family (38)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101996418B1 (ko) * | 2016-12-30 | 2019-07-04 | 현대자동차주식회사 | 센서 융합 기반 보행자 탐지 및 보행자 충돌 방지 장치 및 방법 |
| KR101996419B1 (ko) * | 2016-12-30 | 2019-07-04 | 현대자동차주식회사 | 센서 융합 기반 보행자 탐지 및 보행자 충돌 방지 장치 및 방법 |
| US10403145B2 (en) * | 2017-01-19 | 2019-09-03 | Ford Global Technologies, Llc | Collison mitigation and avoidance |
| JP6816658B2 (ja) * | 2017-06-09 | 2021-01-20 | トヨタ自動車株式会社 | 物標情報取得装置 |
| JP6881219B2 (ja) * | 2017-10-18 | 2021-06-02 | トヨタ自動車株式会社 | 衝突前制御装置及び衝突前制御方法 |
| JP6981197B2 (ja) * | 2017-11-17 | 2021-12-15 | トヨタ自動車株式会社 | 車両制御装置 |
| DE102017223486A1 (de) * | 2017-12-21 | 2019-06-27 | Continental Teves Ag & Co. Ohg | Verfahren und System zum Vermeiden von lateralen Kollisionen |
| US10752218B2 (en) * | 2018-02-22 | 2020-08-25 | Ford Global Technologies, Llc | Camera with cleaning system |
| JP7052543B2 (ja) * | 2018-05-09 | 2022-04-12 | トヨタ自動車株式会社 | 自車位置推定装置 |
| CN108710368B (zh) * | 2018-05-23 | 2021-07-23 | 北京新能源汽车股份有限公司 | 一种无人驾驶系统及电动汽车 |
| KR102592825B1 (ko) * | 2018-08-31 | 2023-10-23 | 현대자동차주식회사 | 충돌 회피 제어 장치 및 그 방법 |
| US10882522B2 (en) * | 2018-09-13 | 2021-01-05 | Toyota Research Institute, Inc. | Systems and methods for agent tracking |
| US10829113B2 (en) * | 2018-09-17 | 2020-11-10 | Ford Global Technologies, Llc | Vehicle collision avoidance |
| US12330646B2 (en) | 2018-10-18 | 2025-06-17 | Autobrains Technologies Ltd | Off road assistance |
| US20200133308A1 (en) * | 2018-10-18 | 2020-04-30 | Cartica Ai Ltd | Vehicle to vehicle (v2v) communication less truck platooning |
| US10748038B1 (en) | 2019-03-31 | 2020-08-18 | Cortica Ltd. | Efficient calculation of a robust signature of a media unit |
| US12158516B2 (en) * | 2018-11-14 | 2024-12-03 | Sony Group Corporation | Control device, control method and sensor control system |
| JP2020179808A (ja) * | 2019-04-26 | 2020-11-05 | トヨタ自動車株式会社 | 車両制御装置 |
| JP7424760B2 (ja) * | 2019-06-12 | 2024-01-30 | 株式会社Subaru | 車両制御装置 |
| JP7328863B2 (ja) * | 2019-10-11 | 2023-08-17 | 株式会社デンソー | 制御装置 |
| CN112130152B (zh) * | 2020-09-16 | 2023-09-05 | 东风汽车集团有限公司 | 一种汽车与目标物横向距离修正的方法 |
| WO2022064588A1 (ja) * | 2020-09-24 | 2022-03-31 | 三菱電機株式会社 | 情報処理システム、情報処理装置、プログラム及び情報処理方法 |
| CN112162275B (zh) * | 2020-09-29 | 2024-05-14 | 安徽江淮汽车集团股份有限公司 | 目标物识别方法、装置、设备及存储介质 |
| US12049116B2 (en) | 2020-09-30 | 2024-07-30 | Autobrains Technologies Ltd | Configuring an active suspension |
| US12142005B2 (en) | 2020-10-13 | 2024-11-12 | Autobrains Technologies Ltd | Camera based distance measurements |
| JP7283463B2 (ja) * | 2020-12-07 | 2023-05-30 | トヨタ自動車株式会社 | 衝突回避装置 |
| US12257949B2 (en) | 2021-01-25 | 2025-03-25 | Autobrains Technologies Ltd | Alerting on driving affecting signal |
| JP7347457B2 (ja) * | 2021-02-25 | 2023-09-20 | いすゞ自動車株式会社 | 運転支援装置及び運転支援方法 |
| US12139166B2 (en) | 2021-06-07 | 2024-11-12 | Autobrains Technologies Ltd | Cabin preferences setting that is based on identification of one or more persons in the cabin |
| US12511873B2 (en) | 2021-06-07 | 2025-12-30 | Cortica, Ltd. | Isolating unique and representative patterns of a concept structure |
| KR20230005779A (ko) | 2021-07-01 | 2023-01-10 | 오토브레인즈 테크놀로지스 리미티드 | 차선 경계 감지 |
| US12110075B2 (en) | 2021-08-05 | 2024-10-08 | AutoBrains Technologies Ltd. | Providing a prediction of a radius of a motorcycle turn |
| JP2023062557A (ja) * | 2021-10-21 | 2023-05-08 | トヨタ自動車株式会社 | 車両の制御装置、制御方法、プログラム |
| US12293560B2 (en) | 2021-10-26 | 2025-05-06 | Autobrains Technologies Ltd | Context based separation of on-/off-vehicle points of interest in videos |
| CN116176593A (zh) * | 2021-11-29 | 2023-05-30 | 罗伯特·博世有限公司 | 驾驶辅助系统及其对象状态参数确定设备和方法 |
| JP7813145B2 (ja) * | 2022-01-24 | 2026-02-12 | 株式会社Subaru | 車両の運転支援装置 |
| CN114771515B (zh) * | 2022-04-15 | 2024-08-27 | 合众新能源汽车股份有限公司 | 车辆碰撞处理方法、装置及相关设备 |
| DE102022210567A1 (de) * | 2022-10-06 | 2024-04-11 | Zf Friedrichshafen Ag | Parametrisierung einer Kollision eines Fahrzeugs |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3173877B2 (ja) * | 1992-07-17 | 2001-06-04 | マツダ株式会社 | 車両の安全装置 |
| JP4016826B2 (ja) * | 2002-12-10 | 2007-12-05 | 株式会社デンソー | 物標識別方法及び装置、プログラム |
| JP5070713B2 (ja) * | 2006-02-27 | 2012-11-14 | トヨタ自動車株式会社 | 物体検出装置 |
| JP2008143429A (ja) * | 2006-12-12 | 2008-06-26 | Toyota Motor Corp | 衝突予測装置 |
| US8600606B2 (en) * | 2010-02-11 | 2013-12-03 | GM Global Technology Operations LLC | Vehicle safety systems and methods |
| JP5679683B2 (ja) * | 2010-03-16 | 2015-03-04 | ダイハツ工業株式会社 | 物標認識装置 |
| JP5595078B2 (ja) * | 2010-03-16 | 2014-09-24 | ダイハツ工業株式会社 | 運転支援装置 |
| EP2894619A4 (en) * | 2012-09-03 | 2016-03-16 | Toyota Motor Co Ltd | COLLISION DETERMINATION AND COLLISION DETERMINATION METHOD |
| JP2014139756A (ja) | 2013-01-21 | 2014-07-31 | Toyota Motor Corp | 運転支援装置 |
| JP5729398B2 (ja) | 2013-01-22 | 2015-06-03 | 株式会社デンソー | 車載物標検出装置 |
| JP6020321B2 (ja) * | 2013-04-11 | 2016-11-02 | 株式会社デンソー | 物標検出装置及び車両制御システム |
| JP6155963B2 (ja) * | 2013-08-21 | 2017-07-05 | 株式会社デンソー | 衝突緩和装置 |
| JP5929870B2 (ja) * | 2013-10-17 | 2016-06-08 | 株式会社デンソー | 物標検出装置 |
-
2015
- 2015-05-27 JP JP2015107902A patent/JP6561584B2/ja active Active
-
2016
- 2016-05-11 WO PCT/JP2016/063954 patent/WO2016190099A1/ja not_active Ceased
- 2016-05-11 CN CN201680030706.XA patent/CN107615092B/zh active Active
- 2016-05-11 US US15/576,537 patent/US10672275B2/en active Active
- 2016-05-11 DE DE112016002387.1T patent/DE112016002387T5/de active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| WO2016190099A1 (ja) | 2016-12-01 |
| US10672275B2 (en) | 2020-06-02 |
| DE112016002387T5 (de) | 2018-02-15 |
| CN107615092A (zh) | 2018-01-19 |
| CN107615092B (zh) | 2020-11-06 |
| JP2016223812A (ja) | 2016-12-28 |
| US20180151073A1 (en) | 2018-05-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6561584B2 (ja) | 車両制御装置、及び車両制御方法 | |
| JP6581379B2 (ja) | 車両制御装置、及び車両制御方法 | |
| JP6432447B2 (ja) | 車両制御装置、及び車両制御方法 | |
| JP6453695B2 (ja) | 運転支援装置、及び運転支援方法 | |
| JP6384446B2 (ja) | 車両制御装置、車両制御方法 | |
| JP6592266B2 (ja) | 物体検知装置、及び物体検知方法 | |
| JP6432482B2 (ja) | 車両制御装置、車両制御方法 | |
| JP2016192166A (ja) | 車両制御装置、及び車両制御方法 | |
| WO2018074287A1 (ja) | 車両制御装置 | |
| JP6319181B2 (ja) | 車両制御装置、及び車両制御方法 | |
| JP6535194B2 (ja) | 車両制御装置、及び車両制御方法 | |
| JP2019114030A (ja) | 衝突判定装置 | |
| US20190061750A1 (en) | Collision mitigation control device | |
| JP2017117344A (ja) | 走行支援装置 | |
| JP2017111684A (ja) | 制御装置、制御方法 | |
| WO2017104387A1 (ja) | 物体検知装置及び物体検知方法 | |
| JP6432538B2 (ja) | 衝突予測装置 | |
| JP7054327B2 (ja) | 走行支援装置 | |
| WO2018092564A1 (ja) | 車両制御装置、及び車両制御方法 | |
| JP2025150847A (ja) | 運転支援装置、運転支援方法および運転支援プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170725 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170725 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180626 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181218 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190625 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190708 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6561584 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |