KR20140108719A - 하이브리드 차량용 구동 장치 - Google Patents
하이브리드 차량용 구동 장치 Download PDFInfo
- Publication number
- KR20140108719A KR20140108719A KR1020147021383A KR20147021383A KR20140108719A KR 20140108719 A KR20140108719 A KR 20140108719A KR 1020147021383 A KR1020147021383 A KR 1020147021383A KR 20147021383 A KR20147021383 A KR 20147021383A KR 20140108719 A KR20140108719 A KR 20140108719A
- Authority
- KR
- South Korea
- Prior art keywords
- engine
- power transmission
- planetary gear
- clutch
- rotation
- Prior art date
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/36—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the transmission gearings
- B60K6/365—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the transmission gearings with the gears having orbital motion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/38—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the driveline clutches
- B60K6/387—Actuated clutches, i.e. clutches engaged or disengaged by electric, hydraulic or mechanical actuating means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/44—Series-parallel type
- B60K6/445—Differential gearing distribution type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/50—Architecture of the driveline characterised by arrangement or kind of transmission units
- B60K6/54—Transmission for changing ratio
- B60K6/547—Transmission for changing ratio the transmission being a stepped gearing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
- B60W10/11—Stepped gearings
- B60W10/111—Stepped gearings with separate change-speed gear trains arranged in series
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/20—Control strategies involving selection of hybrid configuration, e.g. selection between series or parallel configuration
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H3/00—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion
- F16H3/44—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion using gears having orbital motion
- F16H3/72—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion using gears having orbital motion with a secondary drive, e.g. regulating motor, in order to vary speed continuously
- F16H3/727—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion using gears having orbital motion with a secondary drive, e.g. regulating motor, in order to vary speed continuously with at least two dynamo electric machines for creating an electric power path inside the gearing, e.g. using generator and motor for a variable power torque path
- F16H3/728—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion using gears having orbital motion with a secondary drive, e.g. regulating motor, in order to vary speed continuously with at least two dynamo electric machines for creating an electric power path inside the gearing, e.g. using generator and motor for a variable power torque path with means to change ratio in the mechanical gearing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/38—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the driveline clutches
- B60K2006/381—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the driveline clutches characterized by driveline brakes
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H37/00—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00
- F16H37/02—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings
- F16H37/06—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts
- F16H37/08—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts with differential gearing
- F16H37/0833—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts with differential gearing with arrangements for dividing torque between two or more intermediate shafts, i.e. with two or more internal power paths
- F16H37/084—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts with differential gearing with arrangements for dividing torque between two or more intermediate shafts, i.e. with two or more internal power paths at least one power path being a continuously variable transmission, i.e. CVT
- F16H2037/0866—Power split variators with distributing differentials, with the output of the CVT connected or connectable to the output shaft
- F16H2037/0873—Power split variators with distributing differentials, with the output of the CVT connected or connectable to the output shaft with switching, e.g. to change ranges
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H2200/00—Transmissions for multiple ratios
- F16H2200/20—Transmissions using gears with orbital motion
- F16H2200/2002—Transmissions using gears with orbital motion characterised by the number of sets of orbital gears
- F16H2200/2007—Transmissions using gears with orbital motion characterised by the number of sets of orbital gears with two sets of orbital gears
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H2200/00—Transmissions for multiple ratios
- F16H2200/20—Transmissions using gears with orbital motion
- F16H2200/2002—Transmissions using gears with orbital motion characterised by the number of sets of orbital gears
- F16H2200/201—Transmissions using gears with orbital motion characterised by the number of sets of orbital gears with three sets of orbital gears
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H2200/00—Transmissions for multiple ratios
- F16H2200/20—Transmissions using gears with orbital motion
- F16H2200/2097—Transmissions using gears with orbital motion comprising an orbital gear set member permanently connected to the housing, e.g. a sun wheel permanently connected to the housing
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
- Y10S903/904—Component specially adapted for hev
- Y10S903/915—Specific drive or transmission adapted for hev
- Y10S903/917—Specific drive or transmission adapted for hev with transmission for changing gear ratio
- Y10S903/919—Stepped shift
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- General Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
- Arrangement Of Transmissions (AREA)
- Structure Of Transmissions (AREA)
Abstract
기관(1)과 접속되고, 기관의 회전을 전달하는 동력 전달 기구(10)와, 동력 전달 기구와 구동륜(32)을 접속하는 차동 기구(20)와, 동력 전달 기구를 변속시키는 전환 장치(CL1, BK1)를 구비하고, 차동 기구는, 동력 전달 기구의 출력 요소(13)에 접속된 제1 회전 요소(24)와, 제1 회전 전기 기기(MG1)에 접속된 제2 회전 요소(21)와, 제2 회전 전기 기기(MG2) 및 구동륜에 접속된 제3 회전 요소(23)를 갖고, 전환 장치에 의해, 동력 전달 기구의 출력 요소의 회전을 규제한다.
Description
본 발명은 하이브리드 차량용 구동 장치에 관한 것이다.
종래, 변속 기구를 구비한 하이브리드 차량이 공지이다. 예를 들어, 특허문헌 1에는, 내연 기관의 회전을 변속하여 동력 분배 기구에 전달하는 변속 기구와, 내연 기관으로부터의 동력을 변속 기구에 전달하는 제1 전달축과, 변속 기구로부터 출력된 동력을 동력 분배 기구에 전달하는 제2 전달축을 구비한 하이브리드 차량의 구동 장치의 기술이 개시되어 있다. 상기 특허문헌 1의 변속 기구는, 2세트의 유성 기어 기구가 조합된 차동 기구와, 차동 기구의 링 기어 R1의 회전을 정지 가능한 제1 브레이크와, 링 기어 R2의 회전을 정지 가능한 제2 브레이크와, 제1 전달축으로부터 링 기어 R1으로의 동력 전달을 단속하는 클러치를 갖고 있다.
기관의 회전을 변속 가능한 기구를 구비한 하이브리드 차량에 있어서, 구동 장치를 간소화할 수 있는 것이 바람직하다. 예를 들어, 구성이 간소하며, 또한 2개의 회전 전기 기기를 동력원으로 하는 주행을 실현할 수 있는 것이 바람직하다.
본 발명의 목적은, 기관의 회전을 변속하는 것, 및 2개의 회전 전기 기기를 동력원으로 하는 주행이 가능하고, 또한 구성이 간소한 하이브리드 차량용 구동 장치를 제공하는 것이다.
본 발명의 하이브리드 차량용 구동 장치는, 기관과 접속되고, 상기 기관의 회전을 전달하는 동력 전달 기구와, 상기 동력 전달 기구와 구동륜을 접속하는 차동 기구와, 상기 동력 전달 기구를 변속시키는 전환 장치를 구비하고, 상기 차동 기구는, 상기 동력 전달 기구의 출력 요소에 접속된 제1 회전 요소와, 제1 회전 전기 기기에 접속된 제2 회전 요소와, 제2 회전 전기 기기 및 상기 구동륜에 접속된 제3 회전 요소를 갖고, 상기 전환 장치에 의해, 상기 동력 전달 기구의 출력 요소의 회전을 규제하는 것을 특징으로 한다.
상기 하이브리드 차량용 구동 장치에 있어서, 상기 동력 전달 기구는, 상기 기관의 회전을 증속하여 출력할 수 있는 것이 바람직하다.
상기 하이브리드 차량용 구동 장치에 있어서, 상기 동력 전달 기구는, 상기 기관의 회전을 감속하여 출력할 수 있는 것이 바람직하다.
상기 하이브리드 차량용 구동 장치에 있어서, 상기 전환 장치에 의해 상기 동력 전달 기구의 출력 요소의 회전을 규제하여, 상기 제1 회전 전기 기기 및 상기 제2 회전 전기 기기를 동력원으로 하여 주행하는 모드를 갖는 것이 바람직하다.
상기 하이브리드 차량용 구동 장치에 있어서, 상기 동력 전달 기구는, 차동 기구이며, 상기 전환 장치는, 상기 동력 전달 기구의 차동을 규제하는 상태와, 상기 동력 전달 기구의 차동을 허용하는 상태를 전환하여 상기 동력 전달 기구를 변속시키는 것이 바람직하다.
상기 하이브리드 차량용 구동 장치에 있어서, 상기 동력 전달 기구와 상기 차동 기구를 동시에 변속시키는 것이 바람직하다.
상기 하이브리드 차량용 구동 장치에 있어서, 상기 동력 전달 기구와 상기 차동 기구를 동시에 변속시킬 때에, 상기 동력 전달 기구 및 상기 차동 기구의 한쪽의 변속비를 증가시키고, 다른 쪽의 변속비를 감소시키는 것이 바람직하다.
상기 하이브리드 차량용 구동 장치에 있어서, 상기 동력 전달 기구는, 차동 기구이며, 상기 전환 장치는, 상기 동력 전달 기구의 회전 요소끼리를 접속할 수 있는 클러치와, 상기 동력 전달 기구의 회전 요소의 회전을 규제하는 브레이크를 갖는 것이 바람직하다.
본 발명에 관한 하이브리드 차량용 구동 장치는, 기관과 접속되고, 기관의 회전을 전달하는 동력 전달 기구와, 동력 전달 기구와 구동륜을 접속하는 차동 기구와, 동력 전달 기구를 변속시키는 전환 장치를 구비한다. 차동 기구는, 동력 전달 기구의 출력 요소에 접속된 제1 회전 요소와, 제1 회전 전기 기기에 접속된 제2 회전 요소와, 제2 회전 전기 기기 및 구동륜에 접속된 제3 회전 요소를 갖는다. 하이브리드 차량용 구동 장치는, 전환 장치에 의해, 동력 전달 기구의 출력 요소의 회전을 규제한다. 본 발명에 관한 하이브리드 차량용 구동 장치에 의하면, 간소한 구성으로, 기관의 주행 중에 변속을 하는 것, 및 2개의 회전 전기 기기를 동력원으로 하여 주행하는 것을 실현할 수 있다고 하는 효과를 발휘한다.
도 1은 실시 형태에 관한 차량의 골격도이다.
도 2는 실시 형태에 관한 차량의 입출력 관계도이다.
도 3은 실시 형태에 관한 하이브리드 차량용 구동 장치의 작동 결합표를 나타내는 도면이다.
도 4는 단독 모터 EV 모드에 관한 공선도이다.
도 5는 양 모터 EV 모드에 관한 공선도이다.
도 6은 로우 상태의 HV 주행 모드에 관한 공선도이다.
도 7은 하이 상태의 HV 주행 모드에 관한 공선도이다.
도 8은 실시 형태에 관한 이론 전달 효율선을 나타내는 도면이다.
도 9는 실시 형태의 엔진 시동 제어에 관한 흐름도이다.
도 10은 실시 형태의 엔진 시동 제어에 관한 타임차트이다.
도 11은 실시 형태의 제1 변형예에 관한 차량의 골격도이다.
도 12는 실시 형태의 제2 변형예에 관한 차량의 골격도이다.
도 13은 실시 형태의 제3 변형예에 관한 차량의 골격도이다.
도 2는 실시 형태에 관한 차량의 입출력 관계도이다.
도 3은 실시 형태에 관한 하이브리드 차량용 구동 장치의 작동 결합표를 나타내는 도면이다.
도 4는 단독 모터 EV 모드에 관한 공선도이다.
도 5는 양 모터 EV 모드에 관한 공선도이다.
도 6은 로우 상태의 HV 주행 모드에 관한 공선도이다.
도 7은 하이 상태의 HV 주행 모드에 관한 공선도이다.
도 8은 실시 형태에 관한 이론 전달 효율선을 나타내는 도면이다.
도 9는 실시 형태의 엔진 시동 제어에 관한 흐름도이다.
도 10은 실시 형태의 엔진 시동 제어에 관한 타임차트이다.
도 11은 실시 형태의 제1 변형예에 관한 차량의 골격도이다.
도 12는 실시 형태의 제2 변형예에 관한 차량의 골격도이다.
도 13은 실시 형태의 제3 변형예에 관한 차량의 골격도이다.
이하에, 본 발명의 실시 형태에 관한 하이브리드 차량용 구동 장치에 대해 도면을 참조하면서 상세하게 설명한다. 또한, 이 실시 형태에 의해 본 발명이 한정되는 것은 아니다. 또한, 하기의 실시 형태에 있어서의 구성 요소에는, 당업자가 용이하게 상정할 수 있는 것 혹은 실질적으로 동일한 것이 포함된다.
[실시 형태]
도 1 내지 도 10을 참조하여, 실시 형태에 대해 설명한다. 본 실시 형태는, 하이브리드 차량용 구동 장치에 관한 것이다. 도 1은 본 발명의 실시 형태에 관한 차량의 골격도, 도 2는 실시 형태에 관한 차량의 입출력 관계도이다.
본 실시 형태에 관한 차량(100)은 동력원으로서 엔진(1), 제1 회전 전기 기기(MG1) 및 제2 회전 전기 기기(MG2)를 갖는 하이브리드 차량이다. 차량(100)은 외부 전원에 의해 충전 가능한 플러그인 하이브리드 차량이어도 된다. 도 1 및 도 2에 나타내는 바와 같이, 차량(100)은 엔진(1), 제1 유성 기어 기구(10), 제2 유성 기어 기구(20), 제1 회전 전기 기기(MG1), 제2 회전 전기 기기(MG2), 클러치(CL1), 브레이크(BK1), HV_ECU(50), MG_ECU(60) 및 엔진_ECU(70)를 포함하여 구성되어 있다.
또한, 본 실시 형태에 관한 하이브리드 차량용 구동 장치(1-1)는, 제1 유성 기어 기구(10), 제2 유성 기어 기구(20), 클러치(CL1) 및 브레이크(BK1)를 포함하여 구성되어 있다. 하이브리드 차량용 구동 장치(1-1)는 각 ECU(50, 60, 70) 등의 제어 장치를 더 포함하여 구성되어도 된다. 하이브리드 차량용 구동 장치(1-1)는, FF(전배치 엔진 전륜 구동) 차량 혹은 RR(후배치 엔진 후륜 구동) 차량 등에 적용 가능하다. 하이브리드 차량용 구동 장치(1-1)는, 예를 들어 축 방향이 차폭 방향으로 되도록 차량(100)에 탑재된다.
본 실시 형태에 관한 하이브리드 차량용 구동 장치(1-1)에서는, 제1 유성 기어 기구(10), 클러치(CL1) 및 브레이크(BK1)를 포함하여 변속부가 구성되어 있다. 또한, 제2 유성 기어 기구(20)를 포함하여 차동부가 구성되어 있다. 또한, 클러치(CL1) 및 브레이크(BK1)를 포함하여 제1 유성 기어 기구(10)를 변속시키는 전환 장치가 구성되어 있다.
기관인 엔진(1)은 연료의 연소 에너지를 출력축의 회전 운동으로 변환하여 출력한다. 엔진(1)의 출력축은 입력축(2)과 접속되어 있다. 입력축(2)은 동력 전달 장치의 입력축이다. 동력 전달 장치는 제1 회전 전기 기기(MG1), 제2 회전 전기 기기(MG2), 클러치(CL0), 브레이크(BK0), 차동 장치(30) 등을 포함하여 구성되어 있다. 입력축(2)은 엔진(1)의 출력축과 동축상 또한 출력축의 연장선상에 배치되어 있다. 입력축(2)은 제1 유성 기어 기구(10)의 제1 캐리어(14)와 접속되어 있다.
본 실시 형태의 제1 유성 기어 기구(10)는 엔진(1)과 접속되고, 엔진(1)의 회전을 전달하는 동력 전달 기구에 대응하고 있다. 여기에서는, 동력 전달 기구의 일례로서 차동 기구인 제1 유성 기어 기구(10)가 나타내어져 있다. 제1 유성 기어 기구(10)는 제1 차동 기구로서 차량(100)에 탑재되어 있다. 제1 유성 기어 기구(10)는 제2 유성 기어 기구(20)보다도 엔진(1)측에 배치된 입력측 차동 기구이다. 제1 유성 기어 기구(10)는 엔진(1)의 회전을 변속하여 출력 가능하다. 제1 유성 기어 기구(10)는 싱글 피니언식이며, 제1 선 기어(11), 제1 피니언 기어(12), 제1 링 기어(13) 및 제1 캐리어(14)를 갖는다.
제1 링 기어(13)는 제1 선 기어(11)와 동축상이며 또한 제1 선 기어(11)의 직경 방향 외측에 배치되어 있다. 제1 피니언 기어(12)는 제1 선 기어(11)와 제1 링 기어(13) 사이에 배치되어 있고, 제1 선 기어(11) 및 제1 링 기어(13)와 각각 맞물려 있다. 제1 피니언 기어(12)는 제1 캐리어(14)에 의해 회전 가능하게 지지되어 있다. 제1 캐리어(14)는 입력축(2)과 연결되어 있고, 입력축(2)과 일체 회전한다. 따라서, 제1 피니언 기어(12)는 입력축(2)과 함께 입력축(2)의 중심 축선 주위로 회전(공전) 가능하며, 또한 제1 캐리어(14)에 의해 지지되어 제1 피니언 기어(12)의 중심 축선 주위로 회전(자전) 가능하다.
클러치(CL1)는, 제1 선 기어(11)와 제1 캐리어(14)를 연결 가능한 클러치 장치이다. 클러치(CL1)는, 예를 들어 마찰 결합식의 클러치로 할 수 있지만, 이에 한정하지 않고, 맞물림식의 클러치 등의 공지의 클러치 장치가 클러치(CL1)로서 사용되어도 된다. 클러치(CL1)는, 예를 들어 유압에 의해 제어되어 결합 혹은 개방된다. 완전 결합 상태의 클러치(CL1)는, 제1 선 기어(11)와 제1 캐리어(14)를 연결하고, 제1 선 기어(11)와 제1 캐리어(14)를 일체 회전시킬 수 있다. 완전 결합 상태의 클러치(CL1)는, 제1 유성 기어 기구(10)의 차동을 규제한다. 한편, 개방 상태의 클러치(CL1)는, 제1 선 기어(11)와 제1 캐리어(14)를 분리하고, 제1 선 기어(11)와 제1 캐리어(14)의 상대 회전을 허용한다. 즉, 개방 상태의 클러치(CL1)는, 제1 유성 기어 기구(10)의 차동을 허용한다. 또한, 클러치(CL1)는, 반 결합 상태로 제어 가능하다.
브레이크(BK1)는, 제1 선 기어(11)의 회전을 규제할 수 있는 브레이크 장치이다. 브레이크(BK1)는, 제1 선 기어(11)에 접속된 결합 요소와, 차체측, 예를 들어 동력 전달 장치의 케이스와 접속된 결합 요소를 갖는다. 브레이크(BK1)는, 클러치(CL1)와 마찬가지의 마찰 결합식의 클러치 장치로 할 수 있지만, 이에 한정하지 않고, 맞물림식의 클러치 등의 공지의 클러치 장치가 브레이크(BK1)로서 사용되어도 된다. 브레이크(BK1)는, 예를 들어 유압에 의해 제어되어 결합 혹은 개방된다. 완전 결합 상태의 브레이크(BK1)는, 제1 선 기어(11)와 차체측을 연결하고, 제1 선 기어(11)의 회전을 규제할 수 있다. 한편, 개방 상태의 브레이크(BK1)는, 제1 선 기어(11)와 차체측을 분리하고, 제1 선 기어(11)의 회전을 허용한다. 또한, 브레이크(BK1)는, 반 결합 상태로 제어 가능하다.
본 실시 형태의 제2 유성 기어 기구(20)는 제1 유성 기어 기구(10)와 구동륜(32)을 접속하는 차동 기구에 대응하고 있다. 제2 유성 기어 기구(20)는 제2 차동 기구로서 차량(100)에 탑재되어 있다. 제2 유성 기어 기구(20)는 제1 유성 기어 기구(10)보다도 구동륜(32)측에 배치된 출력측 차동 기구이다. 제2 유성 기어 기구(20)는 싱글 피니언식이며, 제2 선 기어(21), 제2 피니언 기어(22), 제2 링 기어(23) 및 제2 캐리어(24)를 갖는다. 제2 유성 기어 기구(20)는 제1 유성 기어 기구(10)와 동축상에 배치되고, 제1 유성 기어 기구(10)를 사이에 두고 엔진(1)과 서로 대향하고 있다.
제2 링 기어(23)는 제2 선 기어(21)와 동축상이며 또한 제2 선 기어(21)의 직경 방향 외측에 배치되어 있다. 제2 피니언 기어(22)는 제2 선 기어(21)와 제2 링 기어(23) 사이에 배치되어 있고, 제2 선 기어(21) 및 제2 링 기어(23)와 각각 맞물려 있다. 제2 피니언 기어(22)는 제2 캐리어(24)에 의해 회전 가능하게 지지되어 있다. 제2 캐리어(24)는 제1 링 기어(13)와 접속되어 있고, 제1 링 기어(13)와 일체 회전한다. 제2 피니언 기어(22)는 제2 캐리어(24)와 함께 입력축(2)의 중심 축선 주위로 회전(공전) 가능하고, 또한 제2 캐리어(24)에 의해 지지되어 제2 피니언 기어(22)의 중심 축선 주위로 회전(자전) 가능하다. 제1 링 기어(13)는 제1 유성 기어 기구(10)의 출력 요소이며, 엔진(1)으로부터 제1 유성 기어 기구(10)에 입력된 회전을 제2 캐리어(24)에 출력할 수 있다. 제2 캐리어(24)는 제1 유성 기어 기구(10)의 출력 요소에 접속된 제1 회전 요소에 대응하고 있다.
제2 선 기어(21)에는 제1 회전 전기 기기(MG1)의 회전축(33)이 접속되어 있다. 제1 회전 전기 기기(MG1)의 회전축(33)은 입력축(2)과 동축상에 배치되어 있고, 제2 선 기어(21)와 일체 회전한다. 제2 선 기어(21)는 제1 회전 전기 기기(MG1)에 접속된 제2 회전 요소에 대응하고 있다. 제2 링 기어(23)에는, 카운터 드라이브 기어(25)가 접속되어 있다. 카운터 드라이브 기어(25)는, 제2 링 기어(23)와 일체 회전하는 출력 기어이다. 제2 링 기어(23)는 제2 회전 전기 기기(MG2) 및 구동륜(32)에 접속된 제3 회전 요소에 대응하고 있다. 제2 링 기어(23)는 제1 회전 전기 기기(MG1) 혹은 제1 유성 기어 기구(10)로부터 입력된 회전을 구동륜(32)에 출력할 수 있는 출력 요소이다.
카운터 드라이브 기어(25)는, 카운터 드리븐 기어(26)와 맞물려 있다. 카운터 드리븐 기어(26)는, 카운터 샤프트(27)를 통해 드라이브 피니언 기어(28)와 접속되어 있다. 카운터 드리븐 기어(26)와 드라이브 피니언 기어(28)는 일체 회전한다. 또한, 카운터 드리븐 기어(26)에는, 리덕션 기어(35)가 맞물려 있다. 리덕션 기어(35)는, 제2 회전 전기 기기(MG2)의 회전축(34)에 접속되어 있다. 즉, 제2 회전 전기 기기(MG2)의 회전은, 리덕션 기어(35)를 통해 카운터 드리븐 기어(26)에 전달된다. 리덕션 기어(35)는, 카운터 드리븐 기어(26)보다도 소직경이며, 제2 회전 전기 기기(MG2)의 회전을 감속하여 카운터 드리븐 기어(26)에 전달한다.
드라이브 피니언 기어(28)는 차동 장치(30)의 디퍼렌셜 링 기어(29)와 맞물려 있다. 차동 장치(30)는 좌우의 구동축(31)을 통해 구동륜(32)과 접속되어 있다. 제2 링 기어(23)는 카운터 드라이브 기어(25), 카운터 드리븐 기어(26), 드라이브 피니언 기어(28), 차동 장치(30) 및 구동축(31)을 통해 구동륜(32)과 접속되어 있다. 또한, 제2 회전 전기 기기(MG2)는, 제2 링 기어(23)와 구동륜(32)의 동력 전달 경로에 대해 접속되어 있고, 제2 링 기어(23) 및 구동륜(32)에 대해 각각 동력을 전달 가능하다.
제1 회전 전기 기기(MG1) 및 제2 회전 전기 기기(MG2)는, 각각 모터(전동기)로서의 기능과, 발전기로서의 기능을 구비하고 있다. 제1 회전 전기 기기(MG1) 및 제2 회전 전기 기기(MG2)는, 인버터를 통해 배터리와 접속되어 있다. 제1 회전 전기 기기(MG1) 및 제2 회전 전기 기기(MG2)는, 배터리로부터 공급되는 전력을 기계적인 동력으로 변환하여 출력할 수 있음과 함께, 입력되는 동력에 의해 구동되어 기계적인 동력을 전력으로 변환할 수 있다. 회전 전기 기기(MG1, MG2)에 의해 발전된 전력은, 배터리에 축전 가능하다. 제1 회전 전기 기기(MG1) 및 제2 회전 전기 기기(MG2)로서는, 예를 들어 교류 동기형의 모터 제너레이터를 사용할 수 있다.
본 실시 형태의 차량(100)에서는, 엔진(1)과 동축상에, 엔진(1)으로부터 가까운 측부터 순서대로, 브레이크(BK1), 클러치(CL1), 제1 유성 기어 기구(10), 카운터 드라이브 기어(25), 제2 유성 기어 기구(20) 및 제1 회전 전기 기기(MG1)가 배치되어 있다. 또한, 본 실시 형태의 하이브리드 차량용 구동 장치(1-1)는, 입력축(2)과, 제2 회전 전기 기기(MG2)의 회전축(34)이 다른 축상에 배치된 복축식으로 되어 있다.
도 2에 나타내는 바와 같이, 차량(100)은 HV_ECU(50), MG_ECU(60) 및 엔진_ECU(70)를 갖는다. 각 ECU(50, 60, 70)는, 컴퓨터를 갖는 전자 제어 유닛이다. HV_ECU(50)는, 차량(100) 전체를 통합 제어하는 기능을 갖고 있다. MG_ECU(60) 및 엔진_ECU(70)는, HV_ECU(50)와 전기적으로 접속되어 있다.
MG_ECU(60)는, 제1 회전 전기 기기(MG1) 및 제2 회전 전기 기기(MG2)를 제어할 수 있다. MG_ECU(60)는, 예를 들어 제1 회전 전기 기기(MG1)에 대해 공급하는 전류값을 조절하고, 제1 회전 전기 기기(MG1)의 출력 토크를 제어하는 것, 및 제2 회전 전기 기기(MG2)에 대해 공급하는 전류값을 조절하고, 제2 회전 전기 기기(MG2)의 출력 토크를 제어할 수 있다.
엔진_ECU(70)는, 엔진(1)을 제어할 수 있다. 엔진_ECU(70)는, 예를 들어 엔진(1)의 전자 스로틀 밸브의 개방도를 제어하는 것, 점화 신호를 출력하여 엔진의 점화 제어를 행하는 것, 엔진(1)에 대한 연료의 분사 제어 등을 행할 수 있다. 엔진_ECU(70)는, 전자 스로틀 밸브의 개방도 제어, 분사 제어, 점화 제어 등에 의해 엔진(1)의 출력 토크를 제어할 수 있다.
HV_ECU(50)에는, 차속 센서, 액셀러레이터 개방도 센서, MG1 회전수 센서, MG2 회전수 센서, 출력축 회전수 센서, 배터리 센서 등이 접속되어 있다. 이들 센서에 의해, HV_ECU(50)는, 차속, 액셀러레이터 개방도, 제1 회전 전기 기기(MG1)의 회전수, 제2 회전 전기 기기(MG2)의 회전수, 동력 전달 장치의 출력축의 회전수, 배터리 상태 SOC 등을 취득할 수 있다.
HV_ECU(50)는, 취득하는 정보에 기초하여, 차량(100)에 대한 요구 구동력이나 요구 파워, 요구 토크 등을 산출할 수 있다. HV_ECU(50)는, 산출한 요구값에 기초하여, 제1 회전 전기 기기(MG1)의 출력 토크(이하, 「MG1 토크」라고도 기재함), 제2 회전 전기 기기(MG2)의 출력 토크(이하, 「MG2 토크」라고도 기재함) 및 엔진(1)의 출력 토크(이하, 「엔진 토크」라고도 기재함)를 결정한다. HV_ECU(50)는, MG1 토크의 지령값 및 MG2 토크의 지령값을 MG_ECU(60)에 대해 출력한다. 또한, HV_ECU(50)는, 엔진 토크의 지령값을 엔진_ECU(70)에 대해 출력한다.
HV_ECU(50)는, 후술하는 주행 모드 등에 기초하여, 클러치(CL1) 및 브레이크(BK1)를 각각 제어한다. HV_ECU(50)는, 클러치(CL1)에 대한 공급 유압의 지령값(PbCL1) 및 브레이크(BK1)에 대한 공급 유압의 지령값(PbBK1)을 각각 출력한다. 도시하지 않은 유압 제어 장치는, 각 지령값 PbCL1, PbBK1에 따라 클러치(CL1) 및 브레이크(BK1)에 대한 공급 유압을 제어한다.
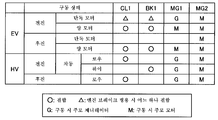
도 3은 본 실시 형태에 관한 하이브리드 차량용 구동 장치(1-1)의 작동 결합표를 나타내는 도면이다. 차량(100)에서는, 하이브리드(HV) 주행 혹은 EV 주행을 선택적으로 실행 가능하다. HV 주행이라 함은, 엔진(1)을 동력원으로 하여 차량(100)을 주행시키는 주행 모드를 말한다. HV 주행에서는, 엔진(1)에 더하여, 또한 제2 회전 전기 기기(MG2)를 동력원으로 해도 된다.
EV 주행은, 제1 회전 전기 기기(MG1) 혹은 제2 회전 전기 기기(MG2) 중 적어도 어느 한쪽을 동력원으로 하여 주행하는 주행 모드이다. EV 주행에서는, 엔진(1)을 정지하여 주행하는 것이 가능하다. 본 실시 형태에 관한 하이브리드 차량용 구동 장치(1-1)는, EV 주행 모드로서, 제2 회전 전기 기기(MG2)를 단독의 동력원으로 하여 차량(100)을 주행시키는 단독 모터 EV 모드와, 제1 회전 전기 기기(MG1) 및 제2 회전 전기 기기(MG2)를 동력원으로 하여 차량(100)을 주행시키는 양 모터 EV 모드를 갖는다.
도 3의 결합표에 있어서, 클러치(CL1)의 란 및 브레이크(BK1)의 란의 동그라미 표시는, 결합을 나타내고, 공란은 개방을 나타낸다. 또한, 삼각 표시는, 결합/개방 모두 실행 가능한 것을 나타낸다. 단독 모터 EV 모드는, 예를 들어 클러치(CL1) 및 브레이크(BK1)를 모두 개방하여 실행된다. 도 4는 단독 모터 EV 모드에 관한 공선도이다. 공선도에 있어서, 부호 S1, C1, R1은, 각각 제1 선 기어(11), 제1 캐리어(14), 제1 링 기어(13)를 나타내고, 부호 S2, C2, R2는, 각각 제2 선 기어(21), 제2 캐리어(24), 제2 링 기어(23)를 나타낸다.
단독 모터 EV 모드에서는, 클러치(CL1) 및 브레이크(BK1)가 개방되어 있다. 브레이크(BK1)가 개방되어 있음으로써, 선 기어(11)의 회전이 허용되고, 클러치(CL1)가 개방되어 있음으로써, 제1 유성 기어 기구(10)는 차동 가능하다. HV_ECU(50)는, MG_ECU(60)를 통해 제2 회전 전기 기기(MG2)에 정토크를 출력시켜 차량(100)에 전진 방향의 구동력을 발생시킨다. 제2 링 기어(23)는 구동륜(32)의 회전과 연동하여 정회전한다. 여기서, 정회전이라 함은, 차량(100)의 전진 시의 제2 링 기어(23)의 회전 방향으로 하는 것이다. HV_ECU(50)는, 제1 회전 전기 기기(MG1)를 제네레이터로서 작동시켜 드래그 손실을 저감시킨다. 구체적으로는, HV_ECU(50)는, 제1 회전 전기 기기(MG1)에 근소한 토크를 가하여 발전시키고, 제1 회전 전기 기기(MG1)의 회전수를 0회전으로 한다. 이에 의해, 제1 회전 전기 기기(MG1)의 드래그 손실을 저감할 수 있다.
제1 링 기어(13)는 제2 캐리어(24)에 연동 회전하여 정회전한다. 제1 유성 기어 기구(10)에서는, 클러치(CL1) 및 브레이크(BK1)가 개방된 뉴트럴의 상태이므로, 엔진(1)은 연동 회전되지 않고, 제1 캐리어(14)는 회전을 정지한다. 따라서 회생량을 크게 취하는 것이 가능하다. 선 기어(11)는 공회전하여 부회전한다. 또한, 제1 유성 기어 기구(10)의 뉴트럴(중립) 상태는, 제1 링 기어(13)와 제1 캐리어(14) 사이에서 동력이 전달되지 않는 상태, 즉, 엔진(1)과 제2 유성 기어 기구(20)가 분리되고, 동력의 전달이 차단된 상태이다. 제1 유성 기어 기구(10)는 변속부 클러치(CL1) 혹은 변속부 브레이크(BK1) 중 적어도 어느 한쪽이 결합되어 있으면, 엔진(1)과 제2 유성 기어 기구(20)를 접속하는 접속 상태로 된다.
단독 모터 EV 모드로 주행 시에, 배터리의 충전 상태가 풀로 되고, 회생 에너지를 취할 수 없는 경우가 발생할 수 있다. 이 경우, 엔진 브레이크를 병용하는 것이 생각된다. 클러치(CL1) 혹은 브레이크(BK1)를 결합함으로써, 엔진(1)을 구동륜(32)과 접속하고, 엔진 브레이크를 구동륜(32)에 작용시킬 수 있다. 도 3에 삼각 표시로 나타내는 바와 같이, 단독 모터 EV 모드로 클러치(CL1) 혹은 브레이크(BK1)를 결합하면, 엔진(1)을 연동 회전 상태로 하고, 제1 회전 전기 기기(MG1)로 엔진 회전수를 높여 엔진 브레이크 상태로 할 수 있다.
양 모터 EV 모드에서는, HV_ECU(50)는, 클러치(CL1) 및 브레이크(BK1)를 결합한다. 도 5는 양 모터 EV 모드에 관한 공선도이다. 클러치(CL1)가 결합함으로써, 제1 유성 기어 기구(10)의 차동은 규제되고, 브레이크(BK1)가 결합함으로써, 제1 선 기어(11)의 회전이 규제된다. 따라서, 제1 유성 기어 기구(10)의 전 회전 요소의 회전이 정지한다. 출력 요소인 제1 링 기어(13)의 회전이 규제됨으로써, 이것과 접속된 제2 캐리어(24)가 0회전으로 로크된다.
HV_ECU(50)는, 제1 회전 전기 기기(MG1) 및 제2 회전 전기 기기(MG2)에 각각 주행 구동용 토크를 출력시킨다. 제2 캐리어(24)는 회전이 규제되고 있음으로써, 제1 회전 전기 기기(MG1)의 토크에 대해 반력을 취하고, 제1 회전 전기 기기(MG1)의 토크를 제2 링 기어(23)로부터 출력시킬 수 있다. 제1 회전 전기 기기(MG1)는, 전진 시에 부토크를 출력하여 부회전함으로써, 제2 링 기어(23)로부터 정의 토크를 출력시킬 수 있다. 한편, 후진 시에는, 제1 회전 전기 기기(MG1)는, 정토크를 출력하여 정회전함으로써, 제2 링 기어(23)로부터 부의 토크를 출력시킬 수 있다.
HV 주행에서는, 차동부로서의 제2 유성 기어 기구(20)는 작동 상태를 기본으로 하고, 변속부의 제1 유성 기어 기구(10)는 로우/하이의 전환이 이루어진다. 도 6은 로우 상태의 HV 주행 모드(이하, 「HV 로우 모드」라고도 기재함)에 관한 공선도, 도 7은 하이 상태의 HV 주행 모드(이하, 「HV 하이 모드」라고도 기재함)에 관한 공선도이다.
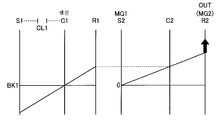
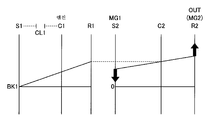
HV 로우 모드에서는, HV_ECU(50)는, 클러치(CL1)를 결합하고, 브레이크(BK1)를 개방한다. 클러치(CL1)가 결합됨으로써, 제1 유성 기어 기구(10)는 차동이 규제되고, 각 회전 요소(11, 13, 14)가 일체 회전한다. 따라서, 엔진(1)의 회전은 증속도 감속도 되지 않고, 등속으로 제1 링 기어(13)로부터 제2 캐리어(24)에 전달된다.
한편, HV 하이 모드에서는, HV_ECU(50)는, 클러치(CL1)를 개방하고, 브레이크(BK1)를 결합한다. 브레이크(BK1)가 결합됨으로써, 제1 선 기어(11)의 회전이 규제된다. 따라서, 제1 유성 기어 기구(10)는 제1 캐리어(14)에 입력된 엔진(1)의 회전이 증속되어 제1 링 기어(13)로부터 출력되는 오버 드라이브(OD) 상태로 된다. 이와 같이, 제1 유성 기어 기구(10)는 엔진(1)의 회전을 증속하여 출력할 수 있다. 오버 드라이브 시의 제1 유성 기어 기구(10)의 변속비는, 예를 들어 0.7로 할 수 있다.
이와 같이, 클러치(CL1) 및 브레이크(BK1)로 이루어지는 전환 장치는, 제1 유성 기어 기구(10)의 차동을 규제하는 상태와, 제1 유성 기어 기구(10)의 차동을 허용하는 상태를 전환하여 제1 유성 기어 기구(10)를 변속시킨다.
HV_ECU(50)는, 예를 들어 고차속에서는 HV 하이 모드를 선택하고, 중저차속에서는 HV 로우 모드를 선택한다. 본 실시 형태에서는, HV 하이 모드와 HV 로우 모드의 전환에 의해 엔진(1)의 회전을 변속하여 출력함으로써, 후술하는 메커니컬 포인트가 2개로 되고, 연비를 향상시킬 수 있다. 도 8은 본 실시 형태에 관한 이론 전달 효율선을 나타내는 도면이다.
도 8에 있어서, 횡축은 변속비, 종축은 이론 전달 효율을 나타낸다. 여기서, 변속비라 함은, 유성 기어 기구(10, 20)의 출력측 회전수에 대한 입력측 회전수의 비(감속비)이며, 예를 들어 제2 링 기어(23)의 회전수에 대한 제1 캐리어(14)의 회전수의 비를 나타낸다. 횡축에 있어서, 좌측이 변속비가 작은 하이 기어측이며, 우측이 변속비가 큰 로우 기어측으로 된다. 이론 전달 효율은, 유성 기어 기구(10, 20)에 입력되는 동력이 전기 패스를 통하지 않고 기계적인 전달에 의해 모두 카운터 드라이브 기어(25)에 전달되는 경우에 최대 효율 1.0으로 된다.
도 8에 나타내는 곡선은, HV 하이 모드와 HV 로우 모드를 적절히 전환한 경우의 HV 주행 모드의 이론 전달 효율선이다. 예를 들어, 동일한 변속비에 있어서 HV 하이 모드와 HV 로우 모드 중 어느 한쪽의 고효율의 모드가 선택된다. 상대적으로 우측이 HV 로우 모드 시의 이론 전달 효율선이며, 좌측이 HV 하이 모드 시의 이론 전달 효율선이다. HV 로우 모드의 전달 효율은, 변속비 γ1에 있어서 최대 효율로 된다. 변속비 γ1에서는, 제1 회전 전기 기기(MG1)[제2 선 기어(21)]의 회전수가 0으로 된다. 이로 인해, 변속비 γ1에서는, 제1 회전 전기 기기(MG1)가 반력을 받는 것에 의한 전기 패스는 0이며, 기계적인 동력의 전달에 의해서만 엔진(1)으로부터 카운터 드라이브 기어(25)에 동력을 전달할 수 있다. 이 변속비 γ1은, 오버 드라이브측의 변속비, 즉, 1보다도 작은 변속비이다. 본 명세서에서는, 이 변속비 γ1을 「제1 기계 전달 변속비 γ1」이라고도 기재한다.
HV 하이 모드의 이론 전달 효율은, 변속비 γ2에 있어서 최대 효율로 된다. HV 하이 모드에서는, 변속비 γ2에 있어서 제1 회전 전기 기기(MG1)[제2 선 기어(21)]의 회전수가 0으로 되고, 기계적인 동력의 전달에 의해서만 엔진(1)으로부터 카운터 드라이브 기어(25)에 동력을 전달할 수 있다. 이 변속비 γ2는, 제1 기계 전달 변속비 γ1보다도 하이 기어측의 변속비이다. 본 명세서에서는, 이 변속비 γ2를 「제2 기계 전달 변속비 γ2」라고도 기재한다.
HV 주행 모드의 이론 전달 효율은, 변속비가 제1 기계 전달 변속비 γ1보다도 로우 기어측의 값으로 됨에 따라 저하된다. 또한, HV 주행 모드의 이론 전달 효율은, 변속비가 제2 기계 전달 변속비 γ2보다도 하이 기어측의 값으로 됨에 따라 저하된다. HV 주행 모드의 이론 전달 효율은, 제1 기계 전달 변속비 γ1과 제2 기계 전달 변속비 γ2 사이의 변속비의 영역에서는, 저효율측으로 만곡되어 있다.
이와 같이, 본 실시 형태에 관한 하이브리드 차량용 구동 장치(1-1)는, 변속비 1보다도 하이 기어측에 2개의 메커니컬 포인트를 갖는다. 하이브리드 차량용 구동 장치(1-1)는, 제1 유성 기어 기구(10)와 클러치(CL1)와 브레이크(BK1)를 포함하는 변속부를 가짐으로써, 엔진(1)이 제2 캐리어(24)에 직접 연결되는 경우의 메커니컬 포인트(제1 기계 전달 변속비 γ1)보다도 하이 기어측에 제2 메커니컬 포인트(제2 기계 전달 변속비 γ2)를 발생시킬 수 있다. 따라서, 하이 기어 동작 시의 전달 효율을 향상시킬 수 있다. 즉, 고속 주행 시의 전달 효율 향상에 의한 연비의 향상을 도모할 수 있는 하이브리드 시스템을 실현할 수 있다.
HV_ECU(50)는, HV 하이 모드와 HV 로우 모드의 전환을 행하는 경우, 제1 유성 기어 기구(10)와 제2 유성 기어 기구(20)를 동시에 변속시키는 협조 변속 제어를 실행한다. HV_ECU(50)는, 협조 변속 제어에 있어서, 제1 유성 기어 기구(10) 및 제2 유성 기어 기구(20)의 한쪽의 변속비를 증가시키고, 다른 쪽의 변속비를 감소시킨다.
HV_ECU(50)는, HV 하이 모드로부터 HV 로우 모드로 전환하는 경우, 모드의 전환과 동기하여 제2 유성 기어 기구(20)의 변속비를 하이 기어측으로 변화시킨다. 이에 의해, 차량(100)의 엔진(1)으로부터 구동륜(32)까지의 전체에서의 변속비의 불연속한 변화를 억제 또는 저감하고, 변속비의 변화의 정도를 저감할 수 있다. 엔진(1)으로부터 구동륜(32)까지의 변속비의 변화가 억제됨으로써, 변속에 수반하는 엔진 회전수의 조절량을 저감시키거나, 혹은 엔진 회전수의 조절을 불필요하게 할 수 있다. HV_ECU(50)는, 예를 들어 차량(100) 전체에서의 변속비를 로우측으로 연속적으로 변화시키도록, 제1 유성 기어 기구(10) 및 제2 유성 기어 기구(20)를 협조하여 변속시킨다.
한편, HV_ECU(50)는, HV 로우 모드로부터 HV 하이 모드로 전환하는 경우, 모드의 전환과 동기하여 제2 유성 기어 기구(20)의 변속비를 로우 기어측으로 변화시킨다. 이에 의해, 차량(100) 전체에서의 변속비의 불연속한 변화를 억제 또는 저감하고, 변속비의 변화의 정도를 저감할 수 있다. HV_ECU(50)는, 예를 들어 차량(100) 전체에서의 변속비를 하이측으로 연속적으로 변화시키도록, 제1 유성 기어 기구(10) 및 제2 유성 기어 기구(20)를 협조하여 변속시킨다.
제2 유성 기어 기구(20)의 변속비의 조절은, 예를 들어 제1 회전 전기 기기(MG1)의 회전수의 제어에 의해 행해진다. HV_ECU(50)는, 예를 들어 입력축(2)과 카운터 드라이브 기어(25) 사이의 변속비를 무단계로 변화시키도록 제1 회전 전기 기기(MG1)를 제어한다. 이에 의해, 유성 기어 기구(10, 20), 제1 회전 전기 기기(MG1), 클러치(CL1) 및 브레이크(BK1)를 포함하는 전체, 즉, 차동부와 변속부를 포함하는 변속 장치가 전기적 무단 변속기로서 작동한다.
(엔진 시동 제어)
다음으로, 본 실시 형태에 관한 하이브리드 차량용 구동 장치(1-1)의 엔진 시동 제어에 대해 설명한다. HV_ECU(50)는, 예를 들어 EV 주행 모드로부터 HV 주행 모드로 이행하는 경우, 정지하고 있었던 엔진(1)을 시동한다. HV_ECU(50)는, 예를 들어 제1 회전 전기 기기(MG1)에 의해 엔진(1)을 회전시켜, 엔진(1)을 시동한다. 도 9를 참조하여, 엔진 시동 제어에 대해 설명한다. 도 9는 본 실시 형태의 엔진 시동 제어에 관한 흐름도, 도 10은 본 실시 형태의 엔진 시동 제어에 관한 타임차트이다. 도 10에 있어서, (a)는 엔진 회전수, (b)는 MG1 토크, (c)는 제1 회전 전기 기기(MG1)의 회전수, (d)는 MG2 토크, (e)는 제2 회전 전기 기기(MG2)의 회전수, (f)는 클러치(CL1)의 유압, (g)는 브레이크(BK1)의 유압, (h)는 충전 상태 SOC를 각각 나타낸다. 도 9에 나타내는 제어 플로우는, 예를 들어 EV 주행 모드에서 주행 중에 실행된다.
스텝 S10에서는, HV_ECU(50)에 의해, 충전 상태 SOC가 임계값 Sf 미만인지 여부가 판정된다. 이 임계값 Sf는, 예를 들어 엔진(1)을 시동하여 배터리를 충전할 필요가 있는지를 판정하는 것이다. 스텝 S10의 판정의 결과, 충전 상태 SOC가 임계값 Sf 미만이라고 판정된 경우(스텝 S10-예)에는 스텝 S20으로 진행하고, 그렇지 않은 경우(스텝 S10-아니오)에는 스텝 S90으로 진행한다. 도 10에서는, 시각 t1에 충전 상태 SOC가 임계값 Sf 미만으로 되고, 스텝 S10에서 긍정 판정이 이루어진다.
스텝 S20에서는, HV_ECU(50)에 의해, 제2 회전 전기 기기(MG2)에 의한 단독 모터 EV 모드인지 여부가 판정된다. 차량(100)에 대한 요구 구동력이 소정값 P1보다도 작은 경우, 제2 회전 전기 기기(MG2)에 의한 단독 모터 EV 모드가 선택된다. 한편, 요구 구동력이 소정값 P1 이상인 경우, 양 모터 EV 모드가 선택된다. 스텝 S20의 판정의 결과, 단독 모터 EV 모드에 의한 주행 중이라고 판정된 경우(스텝 S20-예)에는 스텝 S30으로 진행하고, 그렇지 않은 경우(스텝 S20-아니오)에는 스텝 S60으로 진행한다.
스텝 S30에서는, HV_ECU(50)에 의해, 클러치(CL1)의 결합 전환이 이루어진다. 단독 모터 EV 모드에서는, 클러치(CL1) 및 브레이크(BK1)가 모두 개방되어 있는 경우 외에, 클러치(CL1)가 결합되고 브레이크(BK1)가 개방되어 있는 경우, 클러치(CL1)가 개방되고 브레이크(BK1)가 결합되어 있는 경우가 있다. HV_ECU(50)는, 클러치(CL1)를 결합하고, 브레이크(BK1)를 개방한 상태로 전환한다. 스텝 S30이 실행되면, 스텝 S40으로 진행한다.
스텝 S40에서는, HV_ECU(50)는, 제1 회전 전기 기기(MG1)의 회전수 제어에 의해 엔진 시동 제어를 실시한다. 클러치(CL1)가 결합되면, 엔진(1)은 제1 회전 전기 기기(MG1), 제2 회전 전기 기기(MG2) 및 구동륜(32)과 접속되고, 연동 회전되는 상태로 된다. HV_ECU(50)는, 예를 들어 제1 회전 전기 기기(MG1)의 회전수 제어에 의해 제2 캐리어(24)의 회전수를 0으로 하고, 변속부 클러치(CL1)를 결합시킨다. HV_ECU(50)는, 변속부 클러치(CL1)를 결합시키면, 제1 회전 전기 기기(MG1)의 회전수 제어에 의해 엔진 회전수를 상승시킨다. HV_ECU(50)는, 엔진 회전수가 소정의 회전수까지 상승하면, 엔진(1)에 대해 연료를 공급하고, 점화 제어에 의해 엔진(1)을 시동한다. 스텝 S40이 실행되면, 스텝 S50으로 진행한다.
또한, HV_ECU(50)는, 클러치(CL1)를 결합시킬 때에, 제2 캐리어(24)를 회전시킨 상태에서 클러치(CL1)에 대한 공급 유압을 서서히 증가시켜 클러치(CL1)를 원활하게 결합시킬 수 있다. HV_ECU(50)는, 클러치(CL1)가 완전 결합된 후, 혹은 클러치(CL1)의 클러치 토크 용량을 증가시키는 것과 동시에, 제1 회전 전기 기기(MG1)의 회전수 제어에 의해, 엔진 회전수를 증가시킨다.
스텝 S50에서는, HV_ECU(50)에 의해, 제2 회전 전기 기기(MG2)의 반력 토크 제어가 이루어진다. 제1 회전 전기 기기(MG1)의 회전수 제어에 의해 엔진 회전수를 상승시키는 경우, MG1 토크에 의해, 제2 링 기어(23)에는 시동 반력 토크가 작용한다. 이 시동 반력 토크는, 부방향의 토크이며, 차량(100)의 주행 구동력을 감소시키는 토크이다. HV_ECU(50)는, 시동 반력 토크에 의한 구동력의 감소를 억제하도록, 제2 회전 전기 기기(MG2)의 토크를 정방향으로 증가시킨다. 즉, 반력 토크 제어는, 시동 반력 토크를 캔슬하는 캔슬 토크를 제2 회전 전기 기기(MG2)에 의해 출력시키는 것이다. 이에 의해, 엔진 시동 시의 토크 변동에 의한 드라이바비리티의 저하가 억제된다. 스텝 S50이 실행되면, 본 제어 플로우는 종료된다.
스텝 S60에서는, HV_ECU(50)에 의해, 브레이크(BK1)의 개방 전환이 이루어진다. 양 모터 EV 모드에서는, 클러치(CL1) 및 브레이크(BK1)가 각각 결합되어 있다. HV_ECU(50)는, 브레이크(BK1)를 개방하고, 클러치(CL1)가 결합된 상태로 전환한다. 도 10에서는, 시각 t2에 브레이크(BK1)의 개방이 개시된다. 스텝 S60이 실행되면, 스텝 S70으로 진행한다.
스텝 S70에서는, HV_ECU(50)는, 제1 회전 전기 기기(MG1)의 회전수 제어에 의해 엔진 시동 제어를 실시한다. HV_ECU(50)는, 브레이크(BK1)를 개방하고 있는 동안, MG1 토크를 그때까지의 부토크로부터 0으로 한다. 시각 t3에 브레이크(BK1)의 개방이 완료되면, HV_ECU(50)는, MG1 토크를 정토크로 하고, 제1 회전 전기 기기(MG1)의 회전을 정방향의 회전으로 변화시켜 간다. 제1 회전 전기 기기(MG1)의 회전수의 상승과 함께, 엔진 회전수가 상승한다. 이때의 MG1 토크는 일정값이어도 되고, 제1 회전 전기 기기(MG1)의 회전수에 기초하여 변화해도 된다. 시각 t4에 엔진 회전수가 소정의 회전수에 도달하면, HV_ECU(50)는 엔진(1)에 연료를 공급하고, 점화한다. 엔진(1)의 자립 운전이 개시되면, MG1 토크는 부토크로 전환되고, 제1 회전 전기 기기(MG1)는 엔진(1)의 반력 토크를 받는다. 스텝 S70이 실행되면, 스텝 S80으로 진행한다.
스텝 S80에서는, HV_ECU(50)에 의해, 제2 회전 전기 기기(MG2)의 반력 토크 제어가 이루어진다. 스텝 S80의 반력 토크 제어는, 스텝 S50의 반력 토크 제어와 마찬가지의 것일 수 있다. 도 10에서는, 시각 t3에 반력 토크 제어에 의해 MG2 토크가 증가한다. 엔진(1)에 대한 점화가 개시되어 엔진 토크가 출력되기 시작하는 시각 t4에 반력 토크 제어가 종료되고, MG2 토크가 저감된다. 스텝 S80이 실행되면, 본 제어 플로우는 종료된다.
스텝 S90에서는, HV_ECU(50)에 의해, 모터 주행이 계속된다. HV_ECU(50)는, 엔진 시동이 불필요하므로, EV 주행 모드에 의한 주행을 계속시킨다. 스텝 S90이 실행되면, 본 제어 플로우는 종료된다.
이상 설명한 바와 같이, 본 실시 형태에 관한 하이브리드 차량용 구동 장치(1-1)는, 제1 유성 기어 기구(10), 클러치(CL1) 및 브레이크(BK1)를 포함하는 변속부에 의해 HV 하이 모드와 HV 로우 모드의 전환이 가능하고, 차량(100)의 전달 효율을 향상시킬 수 있다. 또한, 변속부의 후단에는, 직렬로 차동부로서의 제2 유성 기어 기구(20)가 접속되어 있다. 제1 유성 기어 기구(10)가 오버 드라이브이므로, 제1 회전 전기 기기(MG1)를 크게 고(高)토크화하지 않아도 된다고 하는 이점이 있다.
또한, 변속부의 클러치(CL1) 및 브레이크(BK1)를 결합함으로써, 제2 유성 기어 기구(20)의 입력 요소의 회전을 규제할 수 있고, 양 모터 EV 모드에 의한 주행을 가능하게 할 수 있다. 이로 인해, 양 모터 EV 모드를 실현하기 위해 별도 클러치 등을 설치할 필요가 없어, 구성이 간소화된다. 본 실시 형태의 레이아웃에서는, 제2 회전 전기 기기(MG2)의 감속비를 크게 취할 수 있다. 또한, FF 혹은 RR 레이아웃에 의해 콤팩트한 배치를 실현할 수 있다.
또한, 단독 모터 EV 모드에 의한 주행 중에는, 변속부의 클러치(CL1) 및 브레이크(BK1)를 개방하여 뉴트럴로 함으로써 엔진 회전수가 대략 0으로 유지된다. 따라서, 엔진 분리용의 전용의 클러치가 불필요하다.
또한, 변속부의 회전 요소끼리를 결합하여 엔진 회전수를 0으로 고정하는 고정 수단은, 복수의 결합 장치로 이루어진다. 구체적으로는, 본 실시 형태의 고정 수단은, 클러치(CL1) 및 브레이크(BK1)의 2개의 결합 장치를 갖는다. 양 모터 EV 모드로부터 엔진(1)을 시동할 때에는, 복수의 결합 장치의 한쪽은 결합인 상태에서 다른 쪽의 결합 장치를 개방하여 동력 전달 상태로 전환된다. 하나의 결합 장치의 개방이므로, 엔진 시동 시에 제1 회전 전기 기기(MG1)에 의해 엔진 회전수를 상승시키는 제어를 용이하게 행할 수 있다.
또한, HV 주행 시에 변속부를 변속시켜 HV 하이 모드와 HV 로우 모드를 전환할 수 있다. 이 변속에 의해, 메커니컬 포인트를 2개 취할 수 있음으로써, 고속 주행 시에 적절한 변속비를 선택함으로써, 동력 순환의 발생을 억제할 수 있다. 또한, 변속부의 변속 시에 제2 유성 기어 기구(20)를 동시 변속시킴으로써, 변속비의 급격한 변화를 억제할 수 있다.
또한, 본 실시 형태에서는, 단독 모터 EV 모드로부터의 엔진 시동에서는 클러치(CL1)가 결합 상태, 브레이크(BK1)가 개방 상태로 되었지만, 이것 대신에, 브레이크(BK1)가 결합 상태, 클러치(CL1)가 개방 상태로 되어 엔진 시동이 이루어져도 된다.
본 실시 형태의 클러치(CL1)는, 제1 선 기어(11)와 제1 캐리어(14)를 접속하는 것이었지만, 이것에 한정되는 것은 아니다. 클러치(CL1)는, 제1 유성 기어 기구(10)의 각 회전 요소(11, 13, 14)를 서로 접속함으로써 제1 유성 기어 기구(10)의 차동을 규제할 수 있는 것이면 된다. 또한, 브레이크(BK1)는, 제1 선 기어(11)의 회전을 규제하는 것에 한정되는 것은 아니다. 브레이크(BK1)는 제1 유성 기어 기구(10)의 다른 회전 요소의 회전을 규제하는 것이어도 된다.
또한, 전환 장치는, 제1 유성 기어 기구(10)의 출력 요소의 회전을 규제하는 상태와, 출력 요소의 회전을 허용하는 상태를 전환할 수 있는 것이면 되고, 예시한 클러치(CL1)와 브레이크(BK1)의 조합에 한정되는 것은 아니다.
본 실시 형태에서는, 동력 전달 기구 및 차동 기구(출력측 차동 기구)가 각각 유성 기어 기구(10, 20)였지만, 이것에 한정되는 것은 아니다. 동력 전달 기구는, 다른 공지의 차동 기구나 복수의 기어비로 전환하는 것이 가능한 기어 기구여도 된다. 또한, 출력측 차동 기구로서, 다른 공지의 차동 기구가 사용되어도 된다.
동력 전달 기구는, 예를 들어 트윈 클러치식의 것이어도 된다. 예를 들어, 동력 전달 기구는, 제1 클러치를 통해 제1 변속비로 엔진(1)의 회전을 제2 유성 기어 기구(20)에 전달하는 제1 전달부와, 제2 클러치를 통해 제2 변속비로 엔진(1)의 회전을 제2 유성 기어 기구(20)에 전달하는 제2 전달부를 갖는 것이어도 된다. 제1 변속비와, 제2 변속비는 다르다. 이 동력 전달 기구는, 제1 클러치 혹은 제2 클러치 중 어느 하나를 결합함으로써, 엔진(1)으로부터 제2 유성 기어 기구(20)에 동력을 전달할 수 있는 접속 상태로 된다. 또한, 동력 전달 기구는, 제1 클러치 및 제2 클러치를 모두 결합함으로써 출력 요소의 회전이 규제된다. 또한, 동력 전달 기구는, 제1 클러치 및 제2 클러치를 모두 개방함으로써, 엔진(1)과 제2 유성 기어 기구(20)의 동력 전달이 불가능한 중립 상태로 된다.
이러한 구성으로서는, 예를 들어 제2 유성 기어 기구(20)의 입력 요소에 접속된 하나의 입력 기어와, 이 입력 기어에 각각 맞물리는 제1 기어 및 제2 기어를 갖는 것이 있다. 제1 기어는 제1 클러치를 통해 엔진(1)과 접속되어 있고, 제2 기어는 제2 클러치를 통해 엔진(1)과 접속되어 있다. 또한, 제1 기어와 제2 기어는 잇수가 다르다. 제1 전달부는, 제1 기어, 제1 클러치 및 입력 기어를 포함하여 구성된다. 제2 전달부는, 제2 기어, 제2 클러치 및 입력 기어를 포함하여 구성된다. 제1 클러치가 결합되면, 제1 전달부에 의해, 제1 기어와 입력 기어의 기어비에 따른 변속비로 엔진(1)의 회전이 제2 유성 기어 기구(20)에 전달된다. 제2 클러치가 결합되면, 제2 전달부에 의해, 제2 기어와 입력 기어의 기어비에 따른 변속비로 엔진(1)의 회전이 제2 유성 기어 기구(20)에 전달된다. 또한, 제1 클러치 및 제2 클러치가 모두 결합된 경우, 제1 전달부와 제2 전달부의 기어비의 다름에 의해 입력 기어의 회전이 규제된다. 또한, 제1 전달부 및 제2 전달부는, 변속 기구를 더 포함하고 있어도 된다.
본 실시 형태에서는, 제1 유성 기어 기구(10)에 접속되는 기관이 엔진(1)이었지만, 이것 대신에, 다른 공지의 기관이 제1 유성 기어 기구(10)에 접속되어도 된다.
[실시 형태의 제1 변형예]
실시 형태의 제1 변형예에 대해 설명한다. 도 11은 제1 변형예에 관한 차량(100)의 골격도이다. 본 변형예의 하이브리드 차량용 구동 장치(1-2)에 있어서, 상기 실시 형태의 하이브리드 차량용 구동 장치(1-1)와 다른 점은, 제1 유성 기어 기구(40)가 언더 드라이브 변속으로 되어 있는 점, 및 클러치(CL1) 및 브레이크(BK1)의 배치이다.
제1 유성 기어 기구(40)의 구성은, 상기 실시 형태의 제1 유성 기어 기구(10)와 마찬가지의 것으로 할 수 있다. 제1 유성 기어 기구(40)는 제1 선 기어(41), 제1 피니언 기어(42), 제1 링 기어(43) 및 제1 캐리어(44)를 갖는다. 도 11에 나타내는 바와 같이, 입력축(2)은 제1 유성 기어 기구(40)의 제1 링 기어(43)와 접속되어 있다. 또한, 제1 유성 기어 기구(40)의 제1 캐리어(44)가 제2 캐리어(24)와 접속되어 있다. 즉, 본 변형예에서는, 제1 유성 기어 기구(40)의 입력 요소는 제1 링 기어(43)이며, 출력 요소는 제1 캐리어(44)이다.
클러치(CL1)는, 상기 실시 형태와 마찬가지로 제1 선 기어(41)와 제1 캐리어(44)를 연결 가능하다. 또한, 브레이크(BK1)는, 상기 실시 형태와 마찬가지로 제1 선 기어(41)의 회전을 규제할 수 있다. 본 변형예에서는, 클러치(CL1) 및 브레이크(BK1)는, 제1 유성 기어 기구(40)와 제2 유성 기어 기구(20) 사이에 배치되어 있다. 본 변형예에서는, 엔진(1)과 동축상에, 엔진(1)으로부터 가까운 측부터 순서대로, 제1 유성 기어 기구(40), 클러치(CL1), 브레이크(BK1), 카운터 드라이브 기어(25), 제2 유성 기어 기구(20) 및 제1 회전 전기 기기(MG1)가 배치되어 있다.
제1 유성 기어 기구(40)는 엔진(1)의 회전을 감속하여 제1 캐리어(44)로부터 출력할 수 있다. 브레이크(BK1)가 결합되고, 또한 클러치(CL1)가 개방되면, 입력 요소로서의 제1 링 기어(43)의 회전수보다도 출력 요소로서의 제1 캐리어(44)의 회전수가 낮은 언더 드라이브 상태로 된다. 이때의 제1 유성 기어 기구(40)의 변속비는, 예를 들어 1.4로 할 수 있다.
한편, 클러치(CL1)가 결합되고, 또한 브레이크(BK1)가 개방되면, 제1 링 기어(43)의 회전수와 제1 캐리어(44)의 회전수가 동등해진다.
따라서, 본 변형예에 관한 하이브리드 차량용 구동 장치(1-2)에서는, HV 로우 모드일 때에는 브레이크(BK1)가 결합되고, 또한 클러치(CL1)가 개방된다. HV 하이 모드일 때에는, 클러치(CL1)가 결합되고, 또한 브레이크(BK1)가 개방된다.
본 변형예에 관한 하이브리드 차량용 구동 장치(1-2)에서는, 상기 실시 형태와는 반대로, 제2 기계 전달 변속비 γ2는, 제1 기계 전달 변속비 γ1보다도 로우 기어측의 변속비로 된다. 또한, 제1 기계 전달 변속비 γ1 및 제2 기계 전달 변속비 γ2가 모두 변속비 1보다도 하이 기어측의 변속비인 것은 상기 실시 형태와 공통이다.
[실시 형태의 제2 변형예]
실시 형태의 제2 변형예에 대해 설명한다. 상기 실시 형태 및 제1 변형예의 하이브리드 차량용 구동 장치(1-1, 1-2)는 복축식이었지만, 이것 대신에 단축식으로 되어도 된다. 도 12는 본 변형예에 관한 차량(100)의 골격도이다.
도 12에 나타내는 바와 같이, 본 변형예에 관한 하이브리드 차량용 구동 장치(1-3)는, 엔진(1), 제1 유성 기어 기구(10), 제1 회전 전기 기기(MG1), 제2 유성 기어 기구(80) 및 제2 회전 전기 기기(MG2)가 동축상에 배치된 단축식의 것이다. 엔진(1)에 가까운 측부터 순서대로, 브레이크(BK1), 클러치(CL1), 제1 유성 기어 기구(10), 제1 회전 전기 기기(MG1), 제2 유성 기어 기구(80), 제2 회전 전기 기기(MG2)가 배치되어 있다.
변속부의 구성은, 상기 실시 형태에 관한 하이브리드 차량용 구동 장치(1-1)의 변속부의 구성과 마찬가지로 할 수 있다. 제1 회전 전기 기기(MG1)의 회전축(33)은 중공이며, 그 내부에 연결축(85)이 삽입되어 있다. 연결축(85)은 제1 링 기어(13)와 제2 캐리어(84)를 접속하고 있다. 제2 유성 기어 기구(80)는 제2 선 기어(81), 제2 피니언 기어(82), 제2 링 기어(83) 및 제2 캐리어(84)를 갖고 있고, 상기 실시 형태의 제2 유성 기어 기구(20)와 마찬가지의 것으로 할 수 있다.
제2 링 기어(83)는 제2 회전 전기 기기(MG2)의 회전축(34)과 접속되어 있다. 회전축(34)은 프로펠러 샤프트이다. 회전축(34)에 있어서의 제2 링 기어(83)측과 반대측은, 도시하지 않은 차동 장치 및 구동축을 통해 구동륜과 접속되어 있다. 본 변형예에 관한 하이브리드 차량용 구동 장치(1-3)는, 예를 들어 FR(전배치 엔진 후륜 구동) 차량에 적용 가능하다.
[실시 형태의 제3 변형예]
실시 형태의 제3 변형예에 대해 설명한다. 본 변형예에 관한 하이브리드 차량용 구동 장치(1-4)는, 단축식이며, FF 차량 혹은 RR 차량에 적용 가능한 것이다. 도 13은 본 변형예에 관한 차량(100)의 골격도이다.
도 13에 나타내는 바와 같이, 본 변형예에 관한 하이브리드 차량용 구동 장치(1-4)는, 엔진(1), 제1 유성 기어 기구(10), 제2 유성 기어 기구(20), 제3 유성 기어 기구(90), 제1 회전 전기 기기(MG1) 및 제2 회전 전기 기기(MG2)가 동축상에 배치된 단축식의 것이다. 엔진(1)에 가까운 측부터 순서대로, 브레이크(BK1), 클러치(CL1), 제1 유성 기어 기구(10), 카운터 드라이브 기어(25), 제2 유성 기어 기구(20), 제3 유성 기어 기구(90), 제2 회전 전기 기기(MG2), 제1 회전 전기 기기(MG1)가 배치되어 있다.
변속부의 구성은, 상기 실시 형태에 관한 하이브리드 차량용 구동 장치(1-1)의 변속부의 구성과 마찬가지로 할 수 있다. 제3 유성 기어 기구(90)는 싱글 피니언식이며, 제3 선 기어(91), 제3 피니언 기어(92), 제3 링 기어(93)를 갖는다. 제3 피니언 기어(92)를 지지하는 캐리어는, 회전 불가능하게 고정되어 있다. 제3 링 기어(93)는 제2 링 기어(23) 및 카운터 드라이브 기어(25)와 접속되어 있다. 제3 선 기어(91)는 제2 회전 전기 기기(MG2)의 회전축(34)과 접속되어 있다. 제3 유성 기어 기구(90)는 제2 회전 전기 기기(MG2)의 회전을 감속하여 제3 링 기어(93)로부터 출력할 수 있다.
[실시 형태의 제4 변형예]
상기 실시 형태 및 각 변형예에서는, 제1 유성 기어 기구(10, 40) 및 제2 유성 기어 기구(20, 80)는 모두 싱글 피니언식이었지만, 이것에 한정되는 것은 아니다. 예를 들어, 제1 유성 기어 기구(10, 40) 혹은 제2 유성 기어 기구(20, 80) 중 적어도 어느 한쪽이 더블 피니언식으로 되어도 된다. 예를 들어, 제1 유성 기어 기구(10, 40)를 더블 피니언식의 유성 기어 기구로 할 수 있다. 이 경우, 각 공선도에 있어서, 제1 링 기어(13, 43)의 위치와 제1 캐리어(14, 44)의 위치가 바뀐다. 싱글 피니언식과 더블 피니언식에서는, 변속부의 오버 드라이브와 언더 드라이브가 역전된다.
상기한 실시 형태 및 각 변형예에 의하면, 「기관과, 변속부와, 차동부를 구비하고, 기관의 출력축이 변속부의 입력축에 연결되고, 이 차동부의 제1 요소가 변속부의 출력축에 연결되고, 제2 요소에 제1 회전기(전동기)가 연결되고, 제3 요소에 제2 회전기(전동기)가 연결되고, 변속부의 요소를 결합하여 기관 회전수를 0으로 고정하는 것이 가능한 구동 장치」가 개시되어 있다.
상기한 실시 형태 및 변형예에 개시된 내용은, 적절히 조합하여 실행될 수 있다.
1-1, 1-2, 1-3 : 하이브리드 차량용 구동 장치
1 : 엔진
10, 40 : 제1 유성 기어 기구
13, 43 : 제1 링 기어
14, 44 : 제1 캐리어
20, 80 : 제2 유성 기어 기구
21, 81 : 제2 선 기어
23, 83 : 제2 링 기어
24, 84 : 제2 캐리어
32 : 구동륜
50 : HV_ECU
60 : MG_ECU
70 : 엔진_ECU
100 : 차량
BK1 : 브레이크
CL1 : 클러치
MG1 : 제1 회전 전기 기기
MG2 : 제2 회전 전기 기기
1 : 엔진
10, 40 : 제1 유성 기어 기구
13, 43 : 제1 링 기어
14, 44 : 제1 캐리어
20, 80 : 제2 유성 기어 기구
21, 81 : 제2 선 기어
23, 83 : 제2 링 기어
24, 84 : 제2 캐리어
32 : 구동륜
50 : HV_ECU
60 : MG_ECU
70 : 엔진_ECU
100 : 차량
BK1 : 브레이크
CL1 : 클러치
MG1 : 제1 회전 전기 기기
MG2 : 제2 회전 전기 기기
Claims (8)
- 기관과 접속되고, 상기 기관의 회전을 전달하는 동력 전달 기구와,
상기 동력 전달 기구와 구동륜을 접속하는 차동 기구와,
상기 동력 전달 기구를 변속시키는 전환 장치를 구비하고,
상기 차동 기구는, 상기 동력 전달 기구의 출력 요소에 접속된 제1 회전 요소와, 제1 회전 전기 기기에 접속된 제2 회전 요소와, 제2 회전 전기 기기 및 상기 구동륜에 접속된 제3 회전 요소를 갖고,
상기 전환 장치에 의해, 상기 동력 전달 기구의 출력 요소의 회전을 규제하는 것을 특징으로 하는, 하이브리드 차량용 구동 장치. - 제1항에 있어서, 상기 동력 전달 기구는, 상기 기관의 회전을 증속하여 출력할 수 있는, 하이브리드 차량용 구동 장치.
- 제1항에 있어서, 상기 동력 전달 기구는, 상기 기관의 회전을 감속하여 출력할 수 있는, 하이브리드 차량용 구동 장치.
- 제1항 내지 제3항 중 어느 한 항에 있어서, 상기 전환 장치에 의해 상기 동력 전달 기구의 출력 요소의 회전을 규제하여, 상기 제1 회전 전기 기기 및 상기 제2 회전 전기 기기를 동력원으로 하여 주행하는 모드를 갖는, 하이브리드 차량용 구동 장치.
- 제1항 내지 제3항 중 어느 한 항에 있어서, 상기 동력 전달 기구는, 차동 기구이며,
상기 전환 장치는, 상기 동력 전달 기구의 차동을 규제하는 상태와, 상기 동력 전달 기구의 차동을 허용하는 상태를 전환하여 상기 동력 전달 기구를 변속시키는, 하이브리드 차량용 구동 장치. - 제1항에 있어서, 상기 동력 전달 기구와 상기 차동 기구를 동시에 변속시키는, 하이브리드 차량용 구동 장치.
- 제6항에 있어서, 상기 동력 전달 기구와 상기 차동 기구를 동시에 변속시킬 때에, 상기 동력 전달 기구 및 상기 차동 기구의 한쪽의 변속비를 증가시키고, 다른 쪽의 변속비를 감소시키는, 하이브리드 차량용 구동 장치.
- 제1항에 있어서, 상기 동력 전달 기구는, 차동 기구이며,
상기 전환 장치는, 상기 동력 전달 기구의 회전 요소끼리를 접속할 수 있는 클러치와, 상기 동력 전달 기구의 회전 요소의 회전을 규제하는 브레이크를 갖는, 하이브리드 차량용 구동 장치.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2012/052299 WO2013114594A1 (ja) | 2012-02-01 | 2012-02-01 | ハイブリッド車両用駆動装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20140108719A true KR20140108719A (ko) | 2014-09-12 |
| KR101563836B1 KR101563836B1 (ko) | 2015-10-27 |
Family
ID=48904671
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020147021383A KR101563836B1 (ko) | 2012-02-01 | 2012-02-01 | 하이브리드 차량용 구동 장치 |
Country Status (11)
| Country | Link |
|---|---|
| US (1) | US9216641B2 (ko) |
| EP (1) | EP2810839B1 (ko) |
| JP (1) | JP5892180B2 (ko) |
| KR (1) | KR101563836B1 (ko) |
| CN (1) | CN104093617B (ko) |
| AU (1) | AU2012368646B2 (ko) |
| BR (1) | BR112014018596B1 (ko) |
| MX (1) | MX2014009378A (ko) |
| PH (1) | PH12014501747A1 (ko) |
| RU (1) | RU2585501C2 (ko) |
| WO (1) | WO2013114594A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190074945A (ko) * | 2017-12-20 | 2019-06-28 | 도요타 지도샤(주) | 차량 및 차량의 제어 방법 |
Families Citing this family (56)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11161403B2 (en) * | 2012-02-03 | 2021-11-02 | Ge Hybrid Technologies, Llc | Apparatus and method for delivering power in a hybrid vehicle |
| WO2014041698A1 (ja) * | 2012-09-14 | 2014-03-20 | トヨタ自動車株式会社 | ハイブリッド車両の動力伝達装置及びハイブリッドシステム |
| CN104661846B (zh) * | 2012-09-21 | 2017-03-22 | 丰田自动车株式会社 | 混合动力车辆用驱动装置 |
| US9562481B2 (en) | 2012-11-30 | 2017-02-07 | Toyota Jidosha Kabushiki Kaisha | Drive system for hybrid vehicle |
| JP2015051686A (ja) * | 2013-09-06 | 2015-03-19 | トヨタ自動車株式会社 | 車両の駆動制御装置 |
| JP6264796B2 (ja) * | 2013-09-12 | 2018-01-24 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP6119561B2 (ja) * | 2013-11-01 | 2017-04-26 | トヨタ自動車株式会社 | ハイブリッド車両用駆動装置 |
| JP5907155B2 (ja) | 2013-12-10 | 2016-04-20 | トヨタ自動車株式会社 | ハイブリッド駆動装置の制御装置 |
| KR101551014B1 (ko) * | 2013-12-18 | 2015-09-07 | 현대자동차주식회사 | 하이브리드 파워트레인 |
| JP2015120473A (ja) * | 2013-12-25 | 2015-07-02 | トヨタ自動車株式会社 | 動力伝達装置の制御装置 |
| JP6146320B2 (ja) * | 2014-01-17 | 2017-06-14 | トヨタ自動車株式会社 | 動力伝達装置 |
| JP6287887B2 (ja) * | 2015-02-18 | 2018-03-07 | トヨタ自動車株式会社 | ハイブリッド車両 |
| JP6287885B2 (ja) * | 2015-02-18 | 2018-03-07 | トヨタ自動車株式会社 | ハイブリッド車両 |
| JP2016150675A (ja) * | 2015-02-18 | 2016-08-22 | トヨタ自動車株式会社 | ハイブリッド車両 |
| JP6287886B2 (ja) * | 2015-02-18 | 2018-03-07 | トヨタ自動車株式会社 | ハイブリッド車両 |
| JP6213494B2 (ja) * | 2015-02-18 | 2017-10-18 | トヨタ自動車株式会社 | ハイブリッド車両 |
| JP6256374B2 (ja) | 2015-02-18 | 2018-01-10 | トヨタ自動車株式会社 | ハイブリッド車両 |
| JP6319132B2 (ja) * | 2015-02-18 | 2018-05-09 | トヨタ自動車株式会社 | ハイブリッド車両 |
| JP6319133B2 (ja) | 2015-02-18 | 2018-05-09 | トヨタ自動車株式会社 | ハイブリッド車両 |
| JP6401101B2 (ja) * | 2015-04-17 | 2018-10-03 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| JP6183410B2 (ja) * | 2015-05-26 | 2017-08-23 | トヨタ自動車株式会社 | ハイブリッド車両 |
| JP6183409B2 (ja) * | 2015-05-26 | 2017-08-23 | トヨタ自動車株式会社 | ハイブリッド車両 |
| JP6421704B2 (ja) * | 2015-06-15 | 2018-11-14 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP6451524B2 (ja) | 2015-06-18 | 2019-01-16 | トヨタ自動車株式会社 | ハイブリッド車両用駆動装置 |
| FR3039243B1 (fr) * | 2015-07-20 | 2019-05-17 | IFP Energies Nouvelles | Vehicule hybride comprenant une suppression de rupture de couple aux changements de mode en propulsion simple |
| EP3184338B1 (en) * | 2015-12-25 | 2021-12-08 | Toyota Jidosha Kabushiki Kaisha | Drive system for hybrid vehicle |
| JP6468245B2 (ja) * | 2015-12-25 | 2019-02-13 | トヨタ自動車株式会社 | ハイブリッド車両用駆動装置 |
| US10350983B2 (en) | 2016-03-23 | 2019-07-16 | Toyota Jidosha Kabushiki Kaisha | Power transmission system |
| BR102017005676A2 (pt) * | 2016-03-23 | 2017-11-21 | Toyota Jidosha Kabushiki Kaisha | Power transmission system |
| JP6677083B2 (ja) * | 2016-05-31 | 2020-04-08 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP6394654B2 (ja) | 2016-07-19 | 2018-09-26 | トヨタ自動車株式会社 | 車両 |
| JP6547699B2 (ja) * | 2016-07-20 | 2019-07-24 | トヨタ自動車株式会社 | ハイブリッド車両の走行モード切換制御装置 |
| JP6558318B2 (ja) * | 2016-07-21 | 2019-08-14 | トヨタ自動車株式会社 | 車両用駆動装置 |
| JP6547700B2 (ja) * | 2016-07-21 | 2019-07-24 | トヨタ自動車株式会社 | 車両の制御装置 |
| WO2018014966A1 (de) * | 2016-07-22 | 2018-01-25 | Gkn Automotive Ltd. | Getriebeanordnung für ein hybridfahrzeug, antriebssystem und hybridfahrzeug |
| JP6368344B2 (ja) * | 2016-09-14 | 2018-08-01 | 本田技研工業株式会社 | ハイブリッド車両の振動低減装置 |
| JP6593352B2 (ja) | 2017-01-13 | 2019-10-23 | トヨタ自動車株式会社 | ハイブリッド車の制御装置 |
| EP3375651B1 (en) | 2017-03-17 | 2021-10-20 | Toyota Jidosha Kabushiki Kaisha | Drive unit for hybrid vehicles |
| DE102017004898A1 (de) * | 2017-05-20 | 2018-11-22 | Daimler Ag | Getriebevorrichtung für einen Elektroantrieb |
| JP6546967B2 (ja) * | 2017-07-10 | 2019-07-17 | 本田技研工業株式会社 | 動力装置 |
| CN107499110B (zh) * | 2017-09-07 | 2023-11-14 | 中国第一汽车股份有限公司 | 四驱混合动力汽车的动力系统及控制方法 |
| JP6844479B2 (ja) | 2017-09-21 | 2021-03-17 | トヨタ自動車株式会社 | 車両用動力伝達装置の制御装置 |
| JP6888497B2 (ja) * | 2017-09-21 | 2021-06-16 | トヨタ自動車株式会社 | 車両用動力伝達装置の制御装置 |
| JP6891748B2 (ja) | 2017-09-21 | 2021-06-18 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP6801617B2 (ja) * | 2017-09-21 | 2020-12-16 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP6519631B2 (ja) * | 2017-11-02 | 2019-05-29 | トヨタ自動車株式会社 | ハイブリッド車両 |
| JP6830053B2 (ja) * | 2017-12-05 | 2021-02-17 | 株式会社豊田中央研究所 | シリーズハイブリッド自動車 |
| JP6897594B2 (ja) * | 2018-02-14 | 2021-06-30 | トヨタ自動車株式会社 | 車両の駆動制御装置 |
| CN111038245B (zh) * | 2018-10-12 | 2022-08-16 | 上汽通用汽车有限公司 | 混合动力无级变速传动系统和车辆 |
| KR102681920B1 (ko) * | 2018-11-30 | 2024-07-04 | 현대자동차 주식회사 | 하이브리드 차량용 동력전달장치 |
| CN113272194B (zh) * | 2019-01-18 | 2023-08-04 | 三菱自动车工业株式会社 | 车辆的控制装置 |
| JP2020199964A (ja) | 2019-06-12 | 2020-12-17 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| JP7172894B2 (ja) | 2019-07-18 | 2022-11-16 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP2021088312A (ja) * | 2019-12-05 | 2021-06-10 | トヨタ自動車株式会社 | 動力伝達装置の制御装置 |
| CN112406508B (zh) * | 2020-10-29 | 2023-08-08 | 东风汽车集团有限公司 | 混合动力驱动方法、装置、动力系统、车辆及相关设备 |
| JP7363842B2 (ja) * | 2021-03-22 | 2023-10-18 | トヨタ自動車株式会社 | 車両用駆動装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4077003B2 (ja) * | 2005-10-26 | 2008-04-16 | トヨタ自動車株式会社 | 電動車両駆動制御装置及びその制御方法 |
| JP4973165B2 (ja) * | 2006-12-08 | 2012-07-11 | トヨタ自動車株式会社 | 車両用駆動装置の制御装置 |
| JP4569603B2 (ja) * | 2007-01-04 | 2010-10-27 | トヨタ自動車株式会社 | 電源システムおよびそれを備える車両、ならびにその制御方法 |
| JP4940984B2 (ja) | 2007-02-14 | 2012-05-30 | トヨタ自動車株式会社 | 車両用駆動装置の制御装置 |
| JP2008265600A (ja) * | 2007-04-23 | 2008-11-06 | Toyota Motor Corp | 車両およびその制御方法 |
| JP4530005B2 (ja) * | 2007-07-20 | 2010-08-25 | トヨタ自動車株式会社 | ハイブリッド車両 |
| JP4232844B1 (ja) * | 2007-10-17 | 2009-03-04 | トヨタ自動車株式会社 | モータジェネレータ付きギアトレーンユニット |
| JP5092694B2 (ja) * | 2007-11-01 | 2012-12-05 | トヨタ自動車株式会社 | 車両用動力伝達装置の制御装置 |
| JP2009190694A (ja) * | 2008-02-18 | 2009-08-27 | Toyota Motor Corp | ハイブリッド車の駆動装置 |
| JP2009248860A (ja) * | 2008-04-09 | 2009-10-29 | Toyota Motor Corp | ハイブリッド車両 |
| JP4759589B2 (ja) * | 2008-04-24 | 2011-08-31 | 本田技研工業株式会社 | 動力装置 |
| KR101509799B1 (ko) * | 2009-11-12 | 2015-04-06 | 현대자동차주식회사 | 하이브리드 차량의 변속기 |
| US8444516B2 (en) | 2010-09-15 | 2013-05-21 | Chrysler Group Llc | Multi-speed drive unit |
| US9221327B2 (en) | 2012-02-01 | 2015-12-29 | Toyota Jidosha Kabushiki Kaisha | Hybrid vehicle driving apparatus |
-
2012
- 2012-02-01 BR BR112014018596A patent/BR112014018596B1/pt not_active IP Right Cessation
- 2012-02-01 RU RU2014131896/11A patent/RU2585501C2/ru active
- 2012-02-01 CN CN201280068924.4A patent/CN104093617B/zh not_active Expired - Fee Related
- 2012-02-01 US US14/375,659 patent/US9216641B2/en not_active Expired - Fee Related
- 2012-02-01 JP JP2013556146A patent/JP5892180B2/ja active Active
- 2012-02-01 EP EP12867044.5A patent/EP2810839B1/en not_active Not-in-force
- 2012-02-01 WO PCT/JP2012/052299 patent/WO2013114594A1/ja active Application Filing
- 2012-02-01 MX MX2014009378A patent/MX2014009378A/es not_active Application Discontinuation
- 2012-02-01 KR KR1020147021383A patent/KR101563836B1/ko active IP Right Grant
- 2012-02-01 AU AU2012368646A patent/AU2012368646B2/en not_active Ceased
-
2014
- 2014-08-01 PH PH12014501747A patent/PH12014501747A1/en unknown
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190074945A (ko) * | 2017-12-20 | 2019-06-28 | 도요타 지도샤(주) | 차량 및 차량의 제어 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| AU2012368646A1 (en) | 2014-08-21 |
| CN104093617A (zh) | 2014-10-08 |
| EP2810839B1 (en) | 2018-10-17 |
| PH12014501747A1 (en) | 2014-11-10 |
| US9216641B2 (en) | 2015-12-22 |
| KR101563836B1 (ko) | 2015-10-27 |
| EP2810839A1 (en) | 2014-12-10 |
| RU2585501C2 (ru) | 2016-05-27 |
| BR112014018596A8 (pt) | 2017-07-11 |
| BR112014018596A2 (ko) | 2017-06-20 |
| AU2012368646B2 (en) | 2015-09-24 |
| BR112014018596B1 (pt) | 2020-04-14 |
| JPWO2013114594A1 (ja) | 2015-05-11 |
| RU2014131896A (ru) | 2016-03-20 |
| EP2810839A4 (en) | 2015-10-28 |
| US20150021110A1 (en) | 2015-01-22 |
| WO2013114594A1 (ja) | 2013-08-08 |
| MX2014009378A (es) | 2014-10-24 |
| JP5892180B2 (ja) | 2016-03-23 |
| CN104093617B (zh) | 2016-12-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101563836B1 (ko) | 하이브리드 차량용 구동 장치 | |
| JP5915668B2 (ja) | ハイブリッド車両用駆動装置 | |
| KR101785826B1 (ko) | 하이브리드 차량 | |
| CA2930896C (en) | Hybrid vehicle | |
| JP6075376B2 (ja) | ハイブリッド車両用駆動装置 | |
| JP6015770B2 (ja) | ハイブリッド車両用駆動装置 | |
| JP5920473B2 (ja) | ハイブリッド車両用駆動装置 | |
| JPWO2013186924A1 (ja) | ハイブリッド車両用駆動装置 | |
| JP2015024793A (ja) | ハイブリッド車両用駆動装置 | |
| JP2015024764A (ja) | 動力伝達装置 | |
| CN113753020A (zh) | 混合动力车辆的控制装置 | |
| JP2014051146A (ja) | ハイブリッド車両用駆動装置 | |
| JP5929641B2 (ja) | ハイブリッド車両用駆動装置 | |
| JP6015489B2 (ja) | ハイブリッド車両用駆動装置 | |
| WO2014080530A1 (ja) | ハイブリッド車両用駆動装置 | |
| JP2015020725A (ja) | ハイブリッド車両用駆動装置 | |
| JP6052092B2 (ja) | ハイブリッド車両用駆動装置 | |
| WO2014080529A1 (ja) | ハイブリッド車両用駆動装置 | |
| JP2016030528A (ja) | 車両制御装置 | |
| JP2015024794A (ja) | ハイブリッド車両用駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant | ||
| FPAY | Annual fee payment |
Payment date: 20181004 Year of fee payment: 4 |
|
| FPAY | Annual fee payment |
Payment date: 20191002 Year of fee payment: 5 |