JP6661883B2 - 車両用表示制御装置及び車両用表示制御方法 - Google Patents
車両用表示制御装置及び車両用表示制御方法 Download PDFInfo
- Publication number
- JP6661883B2 JP6661883B2 JP2015023622A JP2015023622A JP6661883B2 JP 6661883 B2 JP6661883 B2 JP 6661883B2 JP 2015023622 A JP2015023622 A JP 2015023622A JP 2015023622 A JP2015023622 A JP 2015023622A JP 6661883 B2 JP6661883 B2 JP 6661883B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- vehicle
- display
- route
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 74
- 238000013459 approach Methods 0.000 claims description 6
- 230000008569 process Effects 0.000 description 67
- 238000001514 detection method Methods 0.000 description 43
- 230000004048 modification Effects 0.000 description 37
- 238000012986 modification Methods 0.000 description 37
- 238000002360 preparation method Methods 0.000 description 21
- LJCZNYWLQZZIOS-UHFFFAOYSA-N 2,2,2-trichlorethoxycarbonyl chloride Chemical compound ClC(=O)OCC(Cl)(Cl)Cl LJCZNYWLQZZIOS-UHFFFAOYSA-N 0.000 description 19
- 230000015654 memory Effects 0.000 description 15
- 238000012544 monitoring process Methods 0.000 description 10
- 230000012447 hatching Effects 0.000 description 7
- 238000012545 processing Methods 0.000 description 7
- 230000008859 change Effects 0.000 description 6
- 239000000446 fuel Substances 0.000 description 6
- 230000000694 effects Effects 0.000 description 5
- 230000006870 function Effects 0.000 description 4
- 230000002093 peripheral effect Effects 0.000 description 4
- 230000004044 response Effects 0.000 description 4
- 230000003044 adaptive effect Effects 0.000 description 3
- 239000003086 colorant Substances 0.000 description 3
- 238000004891 communication Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 239000004973 liquid crystal related substance Substances 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- 238000002485 combustion reaction Methods 0.000 description 2
- 238000012217 deletion Methods 0.000 description 2
- 230000037430 deletion Effects 0.000 description 2
- 230000004907 flux Effects 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 241001465754 Metazoa Species 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 239000002826 coolant Substances 0.000 description 1
- 239000000498 cooling water Substances 0.000 description 1
- 230000008034 disappearance Effects 0.000 description 1
- 239000002828 fuel tank Substances 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- -1 light blue Chemical compound 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images






























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3626—Details of the output of route guidance instructions
- G01C21/365—Guidance using head up displays or projectors, e.g. virtual vehicles or arrows projected on the windscreen or on the road itself
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Arrangement of adaptations of instruments
-
- B60K35/23—
-
- B60K35/28—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/10—Path keeping
- B60W30/12—Lane keeping
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
- G08G1/096805—Systems involving transmission of navigation instructions to the vehicle where the transmitted instructions are used to compute a route
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
- G08G1/096855—Systems involving transmission of navigation instructions to the vehicle where the output is provided in a suitable form to the driver
- G08G1/096861—Systems involving transmission of navigation instructions to the vehicle where the output is provided in a suitable form to the driver where the immediate route instructions are output to the driver, e.g. arrow signs for next turn
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G5/00—Control arrangements or circuits for visual indicators common to cathode-ray tube indicators and other visual indicators
-
- B60K2360/166—
-
- B60K2360/177—
-
- B60K2360/334—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0101—Head-up displays characterised by optical features
- G02B2027/0138—Head-up displays characterised by optical features comprising image capture systems, e.g. camera
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0101—Head-up displays characterised by optical features
- G02B2027/0141—Head-up displays characterised by optical features characterised by the informative content of the display
Description
自動制御ユニット(42)により自動で制御される自車両(2)の走行状態に関連した表示画像(56)を、自車両の外界風景(8)と重畳させて虚像表示するHUD(50)に対して、当該虚像表示の制御を行う車両用表示制御装置(54,50e)であって、
自車両の走行レーンにおける幅方向の位置を自動で制御する自動制御ユニットでのレーン制御により自車両に予定される予定経路(Rp)に関連した経路情報を、取得する経路情報取得手段(S101〜S106,S401,S418,S422,S2412)と、
外界風景中の前方走行路(8r)と重畳する虚像表示領域(A1)に、HUDにより結像される表示画像として、予定経路を示す経路画像(560,2560)を、経路情報取得手段により取得された経路情報に基づき形成する経路画像形成手段(S403〜S405,S407,S409〜S411,S413〜S415,S417,S419〜S421,S423〜S425,S2413〜S2415,S2417)と、
自動制御ユニットによるレーン制御の開始が予定される開始予定位置(Ps)に関連した開始情報を、取得する開始情報取得手段(S201〜S207,S406,S412,S416,S2412)と、
前方走行路と重畳する虚像表示領域に、ヘッドアップディスプレイにより結像される表示画像として、前方走行路上での開始予定位置を継続的に示す開始画像(561,2561)を、開始情報取得手段により取得された開始情報に基づき自車両の開始予定位置への接近に従った形状に形成する開始画像形成手段(S403〜S405,S407,S409〜S411,S413〜S415,S417,S419〜S421,S423〜S425,S2413〜S2415,S2417)とを、
少なくとも一つのプロセッサ(54p)により構築される手段として備え、
開始画像形成手段は、レーン制御を指令するためのレーン制御スイッチがオン操作された場合、虚像表示領域に開始画像を形成することを特徴とする。
自動制御ユニット(42)により自動で制御される自車両(2)の走行状態に関連した表示画像(56)を、自車両の外界風景(8)と重畳させて虚像表示するHUD(50)に対して、当該虚像表示の制御を行う車両用表示制御方法であって、
自車両の走行レーンにおける幅方向の位置を自動で制御する自動制御ユニットでのレーン制御により自車両に予定される予定経路(Rp)に関連した経路情報を、取得する経路情報取得ステップ(S101〜S106,S401,S418,S422,S2412)と、
外界風景中の前方走行路(8r)と重畳する虚像表示領域(A1)に、HUDにより結像される表示画像として、予定経路を示す経路画像(560,2560)を、経路情報取得ステップにより取得された経路情報に基づき形成する経路画像形成ステップ(S403〜S405,S407,S409〜S411,S413〜S415,S417,S419〜S421,S423〜S425,S2413〜S2415,S2417)と、
自動制御ユニットによるレーン制御の開始が予定される開始予定位置(Ps)に関連した開始情報を、取得する開始情報取得ステップ(S201〜S207,S406,S412,S416,S2412)と、
前方走行路と重畳する虚像表示領域に、ヘッドアップディスプレイにより結像される前記表示画像として、前方走行路上での開始予定位置を継続的に示す開始画像(561,2561)を、開始情報取得ステップにより取得された開始情報に基づき自車両の開始予定位置への接近に従った形状に形成する開始画像形成ステップ(S403〜S405,S407,S409〜S411,S413〜S415,S417,S419〜S421,S423〜S425,S2413〜S2415,S2417)とを、
少なくとも一つのプロセッサにより実行されるステップとして含み、
開始画像形成ステップでは、レーン制御を指令するためのレーン制御スイッチがオン操作された場合、虚像表示領域に開始画像を形成することを特徴とする。
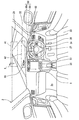
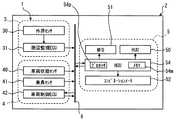
本発明が適用される第一実施形態の走行アシストシステム1は、図1,2に示すように、自車両2に搭載される。
ここまで説明した第一実施形態の作用効果を、以下に説明する。
本発明の第二実施形態は、第一実施形態の変形例である。第二実施形態の表示画像56は、図23〜28に示すように、第一実施形態とは異なる経路画像2560、開始画像2561、終了画像2562及び作動画像2565,2566,2567を、第一実施形態と同様な強調画像563,564と共に含んでいる。そこで以下では、経路画像2560、開始画像2561、終了画像2562及び作動画像2565,2566,2567について、説明する。
以上、本発明の複数の実施形態について説明したが、本発明は、それらの実施形態に限定して解釈されるものではなく、本発明の要旨を逸脱しない範囲内において種々の実施形態及び組み合わせに適用することができる。
(付記1)
自動制御ユニット(42)により自動で制御される自車両(2)の走行状態に関連した表示画像(56)を、前記自車両の外界風景(8)と重畳させて虚像表示するヘッドアップディスプレイ(50)に対して、当該虚像表示の制御を行う車両用表示制御装置(54,50e)であって、
前記自動制御ユニットでの制御により前記自車両に予定される予定経路(Rp)に関連した経路情報を、取得する経路情報取得手段(S101〜S106,S401,S418,S422,S2412)と、
前記外界風景中の前方走行路(8r)と重畳する虚像表示領域(A1)に、前記ヘッドアップディスプレイにより結像される前記表示画像として、前記予定経路を示す経路画像(560,2560)を、前記経路情報取得手段により取得された前記経路情報に基づき形成する経路画像形成手段(S403〜S405,S407,S409〜S411,S413〜S415,S417,S419〜S421,S423〜S425,S2413〜S2415,S2417)とを、
少なくとも一つのプロセッサ(54p)により構築される手段として備えることを特徴とする車両用表示制御装置。
(付記2)
自動制御ユニット(42)により自動で制御される自車両(2)の走行状態に関連した表示画像(56)を、前記自車両の外界風景(8)と重畳させて虚像表示するヘッドアップディスプレイ(50)に対して、当該虚像表示の制御を行う車両用表示制御方法であって、
前記自動制御ユニットでの制御により前記自車両に予定される予定経路(Rp)に関連した経路情報を、取得する経路情報取得ステップ(S101〜S106,S401,S418,S422,S2412)と、
前記外界風景中の前方走行路(8r)と重畳する虚像表示領域(A1)に、前記ヘッドアップディスプレイにより結像される前記表示画像として、前記予定経路を示す経路画像(560,2560)を、前記経路情報取得ステップにより取得された前記経路情報に基づき形成する経路画像形成ステップ(S403〜S405,S407,S409〜S411,S413〜S415,S417,S419〜S421,S423〜S425,S2413〜S2415,S2417)とを、
少なくとも一つのプロセッサにより実行されるステップとして含むことを特徴とする車両用表示制御方法。
Claims (17)
- 自動制御ユニット(42)により自動で制御される自車両(2)の走行状態に関連した表示画像(56)を、前記自車両の外界風景(8)と重畳させて虚像表示するヘッドアップディスプレイ(50)に対して、当該虚像表示の制御を行う車両用表示制御装置(54,50e)であって、
前記自車両の走行レーンにおける幅方向の位置を自動で制御する前記自動制御ユニットでのレーン制御により前記自車両に予定される予定経路(Rp)に関連した経路情報を、取得する経路情報取得手段(S101〜S106,S401,S418,S422,S2412)と、
前記外界風景中の前方走行路(8r)と重畳する虚像表示領域(A1)に、前記ヘッドアップディスプレイにより結像される前記表示画像として、前記予定経路を示す経路画像(560,2560)を、前記経路情報取得手段により取得された前記経路情報に基づき形成する経路画像形成手段(S403〜S405,S407,S409〜S411,S413〜S415,S417,S419〜S421,S423〜S425,S2413〜S2415,S2417)と、
前記自動制御ユニットによる前記レーン制御の開始が予定される開始予定位置(Ps)に関連した開始情報を、取得する開始情報取得手段(S201〜S207,S406,S412,S416,S2412)と、
前記前方走行路と重畳する前記虚像表示領域に、前記ヘッドアップディスプレイにより結像される前記表示画像として、前記前方走行路上での前記開始予定位置を継続的に示す開始画像(561,2561)を、前記開始情報取得手段により取得された前記開始情報に基づき前記自車両の前記開始予定位置への接近に従った形状に形成する開始画像形成手段(S403〜S405,S407,S409〜S411,S413〜S415,S417,S419〜S421,S423〜S425,S2413〜S2415,S2417)とを、
少なくとも一つのプロセッサ(54p)により構築される手段として備え、
前記開始画像形成手段は、前記レーン制御を指令するためのレーン制御スイッチがオン操作された場合、前記虚像表示領域に前記開始画像を形成することを特徴とする車両用表示制御装置。 - 前記レーン制御を実行するレーン制御ユニットを、前記自動制御ユニットとして搭載する前記自車両において、前記虚像表示の制御を行うために、
前記経路画像形成手段は、前記レーン制御ユニットでの前記レーン制御により前記自車両が追従する前記予定経路を示す前記経路画像を、形成することを特徴とする請求項1に記載の車両用表示制御装置。 - 前記経路画像形成手段は、前記自車両側から前方へ向かって漸次延伸する動画状の前記経路画像(560)を、繰返し形成することを特徴とする請求項2に記載の車両用表示制御装置。
- 前記経路画像形成手段は、前記前方走行路上の決められた箇所に位置決めして重畳されることにより、車速に合わせて前記自車両側へ接近する動画状の前記経路画像(2560)を、形成することを特徴とする請求項2に記載の車両用表示制御装置。
- 前記経路画像形成手段(S403〜S405,S407,S409〜S411,S413〜S415,S417,S419〜S421,S423〜S425)は、前記開始画像形成手段(S403〜S405,S407,S409〜S411,S413〜S415,S417,S419〜S421,S423〜S425)による前記開始画像(561)の表示を通過後に、前記経路画像(560)を表示させることを特徴とする請求項1〜4のいずれか一項に記載の車両用表示制御装置。
- 前記経路画像形成手段(S403〜S405,S409〜S411,S419〜S421,S423〜S425,S2413〜S2415,S2417)は、前記開始画像形成手段(S403〜S405,S409〜S411,S419〜S421,S423〜S425,S2413〜S2415,S2417)による前記開始画像(2561)の表示と同時に、前記経路画像(2560)を表示させることを特徴とする請求項1〜4のいずれか一項に記載の車両用表示制御装置。
- 前記自動制御ユニットによる制御の開始後に制御の終了が予定される終了予定位置(Pe)に関連した終了情報を、取得する終了情報取得手段(S201〜S207,S416,S422)と、
前記前方走行路と重畳する前記虚像表示領域に、前記ヘッドアップディスプレイにより結像される前記表示画像として、前記終了予定位置を示す終了画像(562,2562)を、前記終了情報取得手段により取得された前記終了情報に基づき形成する終了画像形成手段(S403〜S405,S407,S409〜S411,S413〜S415,S417,S419〜S421,S423〜S425,S2413〜S2415,S2417)とを、
前記少なくとも一つのプロセッサにより構築される手段として備えることを特徴とする請求項1〜6のいずれか一項に記載の車両用表示制御装置。 - 前記終了画像形成手段は、前記終了画像の表示色を、前記開始画像形成手段による前記開始画像の表示色とは異ならせることを特徴とする請求項7に記載の車両用表示制御装置。
- 前記終了画像形成手段により前記終了画像(562)が形成される期間(Tpel)に前記経路画像形成手段は、前記経路画像(560)の表示色を前記終了画像の表示色と同一色に設定することを特徴とする請求項8に記載の車両用表示制御装置。
- 前記外界風景中での前方車両(8v)の存在有無に応じた前記自車両の追従走行時又は単独走行時に、前記自車両のクルーズを自動で制御するクルーズ制御を実行するクルーズ制御ユニットを、前記自動制御ユニットとして搭載する前記自車両において、前記虚像表示の制御を行うために、
前記前方車両に関連した前方情報を、取得する前方情報取得手段(S301〜S306,S402,S408,S412,S418,S422,S2412)と、
前記前方走行路と重畳する前記虚像表示領域に、前記ヘッドアップディスプレイにより結像される前記表示画像として、前記クルーズ制御ユニットでの前記クルーズ制御により前記自車両が追従する前記前方車両の存在有無を強調する強調画像(563,564)を、前記前方情報取得手段により取得された前記前方情報に基づき形成する強調画像形成手段(S403〜S405,S407,S409〜S411,S413〜S415,S417,S419〜S421,S423〜S425,S2413〜S2415,S2417)とを、
前記少なくとも一つのプロセッサにより構築される手段として備えることを特徴とする請求項1〜9のいずれか一項に記載の車両用表示制御装置。 - 前記強調画像形成手段は、前記自車両側から前方へ向かって漸次移動する動画状の前記強調画像を、繰返し形成することを特徴とする請求項10に記載の車両用表示制御装置。
- 前記クルーズ制御ユニットでの前記クルーズ制御による前記追従走行時に前記強調画像形成手段は、前記自車両側から前記前方車両側へ向かって漸次移動する動画状の前記強調画像を、繰返し形成することを特徴とする請求項11に記載の車両用表示制御装置。
- 前記クルーズ制御ユニットでの前記クルーズ制御による前記追従走行時に前記強調画像形成手段は、前記前方車両まで漸次移動する動画状の前記強調画像を形成した後、前記前方車両を囲む環状に前記強調画像を変化させることを特徴とする請求項12に記載の車両用表示制御装置。
- 前記クルーズ制御ユニットでの前記クルーズ制御による前記単独走行時に前記強調画像形成手段は、前記自車両側から前記前方走行路の水平線(8h)側へ向かって漸次移動する動画状の前記強調画像を、繰返し形成することを特徴とする請求項11〜13のいずれか一項に記載の車両用表示制御装置。
- 前記自動制御ユニットの作動状態に関連した作動情報を、取得する作動情報取得手段(S101〜S106,S301〜S306,S501,S507,S2513)と、
前記虚像表示領域としての第一虚像表示領域よりも、下方且つ前記自車両側に設定される第二虚像表示領域(A2)に、前記ヘッドアップディスプレイにより結像される前記表示画像として、前記自動制御ユニットの前記作動状態を示す作動画像を、前記作動情報取得手段により取得された前記作動情報に基づき形成する作動画像形成手段(S502〜S506,S508〜S512,S2514,S2515)とを、
前記少なくとも一つのプロセッサにより構築される手段として備えることを特徴とする請求項1〜14のいずれか一項に記載の車両用表示制御装置。 - 前記作動画像形成手段は、前記自動制御ユニットの前記作動状態が切替わるのに応じて前記作動画像の表示色を変更することを特徴とする請求項15に記載の車両用表示制御装置。
- 自動制御ユニット(42)により自動で制御される自車両(2)の走行状態に関連した表示画像(56)を、前記自車両の外界風景(8)と重畳させて虚像表示するヘッドアップディスプレイ(50)に対して、当該虚像表示の制御を行う車両用表示制御方法であって、
前記自車両の走行レーンにおける幅方向の位置を自動で制御する前記自動制御ユニットでのレーン制御により前記自車両に予定される予定経路(Rp)に関連した経路情報を、取得する経路情報取得ステップ(S101〜S106,S401,S418,S422,S2412)と、
前記外界風景中の前方走行路(8r)と重畳する虚像表示領域(A1)に、前記ヘッドアップディスプレイにより結像される前記表示画像として、前記予定経路を示す経路画像(560,2560)を、前記経路情報取得ステップにより取得された前記経路情報に基づき形成する経路画像形成ステップ(S403〜S405,S407,S409〜S411,S413〜S415,S417,S419〜S421,S423〜S425,S2413〜S2415,S2417)と、
前記自動制御ユニットによる前記レーン制御の開始が予定される開始予定位置(Ps)に関連した開始情報を、取得する開始情報取得ステップ(S201〜S207,S406,S412,S416,S2412)と、
前記前方走行路と重畳する前記虚像表示領域に、前記ヘッドアップディスプレイにより結像される前記表示画像として、前記前方走行路上での前記開始予定位置を継続的に示す開始画像(561,2561)を、前記開始情報取得ステップにより取得された前記開始情報に基づき前記自車両の前記開始予定位置への接近に従った形状に形成する開始画像形成ステップ(S403〜S405,S407,S409〜S411,S413〜S415,S417,S419〜S421,S423〜S425,S2413〜S2415,S2417)とを、
少なくとも一つのプロセッサにより実行されるステップとして含み、
前記開始画像形成ステップでは、前記レーン制御を指令するためのレーン制御スイッチがオン操作された場合、前記虚像表示領域に前記開始画像を形成することを特徴とする車両用表示制御方法。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015023622A JP6661883B2 (ja) | 2015-02-09 | 2015-02-09 | 車両用表示制御装置及び車両用表示制御方法 |
| PCT/JP2016/000489 WO2016129234A1 (ja) | 2015-02-09 | 2016-02-01 | 車両用表示制御装置及び車両用表示制御方法 |
| US15/549,491 US10197414B2 (en) | 2015-02-09 | 2016-02-01 | Vehicle display control device and vehicle display control method |
| US16/013,223 US10663315B2 (en) | 2015-02-09 | 2018-06-20 | Vehicle display control device and vehicle display control method |
| US16/223,710 US20190120646A1 (en) | 2015-02-09 | 2018-12-18 | Vehicle display control device and vehicle display control method |
| JP2019200869A JP6973462B2 (ja) | 2015-02-09 | 2019-11-05 | 車両用表示制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015023622A JP6661883B2 (ja) | 2015-02-09 | 2015-02-09 | 車両用表示制御装置及び車両用表示制御方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019200869A Division JP6973462B2 (ja) | 2015-02-09 | 2019-11-05 | 車両用表示制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016145783A JP2016145783A (ja) | 2016-08-12 |
| JP2016145783A5 JP2016145783A5 (ja) | 2017-04-13 |
| JP6661883B2 true JP6661883B2 (ja) | 2020-03-11 |
Family
ID=56614531
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015023622A Active JP6661883B2 (ja) | 2015-02-09 | 2015-02-09 | 車両用表示制御装置及び車両用表示制御方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (3) | US10197414B2 (ja) |
| JP (1) | JP6661883B2 (ja) |
| WO (1) | WO2016129234A1 (ja) |
Families Citing this family (42)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6661883B2 (ja) | 2015-02-09 | 2020-03-11 | 株式会社デンソー | 車両用表示制御装置及び車両用表示制御方法 |
| JP6726674B2 (ja) * | 2015-10-15 | 2020-07-22 | マクセル株式会社 | 情報表示装置 |
| EP3246664A3 (en) * | 2016-05-19 | 2018-02-14 | Ricoh Company, Ltd. | Information processing system and information display apparatus |
| JP6716172B2 (ja) * | 2016-10-19 | 2020-07-01 | アルパイン株式会社 | ヘッドアップディスプレイの表示制御装置及び表示制御方法 |
| JP6520905B2 (ja) * | 2016-12-19 | 2019-05-29 | トヨタ自動車株式会社 | 車両用運転支援装置 |
| JP6817088B2 (ja) * | 2017-01-26 | 2021-01-20 | 矢崎総業株式会社 | 表示装置、及び、表示装置本体 |
| WO2018147066A1 (ja) * | 2017-02-08 | 2018-08-16 | 株式会社デンソー | 車両用表示制御装置 |
| JP6720296B2 (ja) * | 2017-06-22 | 2020-07-08 | バイドゥドットコム タイムズ テクロノジー (ベイジン) カンパニー リミテッドBaidu.com Times Technology (Beijing) Co., Ltd. | 自律走行のための地図画像に基づく交通予測 |
| JP6986699B2 (ja) * | 2017-07-04 | 2021-12-22 | パナソニックIpマネジメント株式会社 | 表示制御システム、表示システム、移動体、表示制御方法及びプログラム |
| KR102347876B1 (ko) * | 2017-09-19 | 2022-01-06 | 현대모비스 주식회사 | 증강현실 헤드업 디스플레이의 표시 위치 제어 장치 |
| DE102018204254B4 (de) | 2018-03-20 | 2020-12-03 | Volkswagen Aktiengesellschaft | Verfahren zur Berechnung einer Einblendung von Zusatzinformationen für eine Anzeige auf einer Anzeigeeinheit, Vorrichtung zur Durchführung des Verfahrens sowie Kraftfahrzeug und Computerprogramm |
| WO2019189515A1 (en) | 2018-03-28 | 2019-10-03 | Ricoh Company, Ltd. | Control apparatus, display apparatus, movable body, and image display method |
| US11059421B2 (en) | 2018-03-29 | 2021-07-13 | Honda Motor Co., Ltd. | Vehicle proximity system using heads-up display augmented reality graphics elements |
| WO2019189619A1 (en) | 2018-03-29 | 2019-10-03 | Ricoh Company, Ltd. | Image control apparatus, display apparatus, movable body, and image control method |
| JP7172247B2 (ja) * | 2018-07-26 | 2022-11-16 | トヨタ自動車株式会社 | 表示制御装置、車両用表示装置、表示制御方法及びプログラム |
| JP7197315B2 (ja) * | 2018-09-14 | 2022-12-27 | 株式会社小松製作所 | ホイールローダの表示システムおよびその制御方法 |
| US10495476B1 (en) * | 2018-09-27 | 2019-12-03 | Phiar Technologies, Inc. | Augmented reality navigation systems and methods |
| JP2020051902A (ja) * | 2018-09-27 | 2020-04-02 | 本田技研工業株式会社 | 表示システム、表示方法、およびプログラム |
| US11448518B2 (en) | 2018-09-27 | 2022-09-20 | Phiar Technologies, Inc. | Augmented reality navigational overlay |
| JP6856085B2 (ja) | 2019-03-28 | 2021-04-07 | トヨタ自動車株式会社 | 車両用表示制御装置、方法及びプログラム |
| JP7092158B2 (ja) * | 2019-05-08 | 2022-06-28 | 株式会社デンソー | 表示制御装置及び表示制御プログラム |
| WO2020225989A1 (ja) | 2019-05-08 | 2020-11-12 | 株式会社デンソー | 表示制御装置及び表示制御プログラム |
| JP7313896B2 (ja) * | 2019-05-09 | 2023-07-25 | 矢崎総業株式会社 | 車両用表示装置 |
| JP2021006805A (ja) * | 2019-06-27 | 2021-01-21 | 株式会社デンソー | 表示制御装置及び表示制御プログラム |
| WO2020261781A1 (ja) * | 2019-06-27 | 2020-12-30 | 株式会社デンソー | 表示制御装置、表示制御プログラム、および持続的有形コンピュータ読み取り媒体 |
| CN112208525B (zh) * | 2019-07-10 | 2022-03-29 | 长城汽车股份有限公司 | 混动车辆巡航控制方法及设备 |
| WO2021014954A1 (ja) * | 2019-07-24 | 2021-01-28 | 株式会社デンソー | 表示制御装置及び表示制御プログラム |
| JP7111137B2 (ja) * | 2019-10-02 | 2022-08-02 | 株式会社デンソー | 表示制御装置、および表示制御プログラム |
| WO2021065735A1 (ja) * | 2019-10-02 | 2021-04-08 | 株式会社デンソー | 表示制御装置、および表示制御プログラム |
| JP2021066197A (ja) * | 2019-10-17 | 2021-04-30 | 株式会社デンソー | 表示制御装置、表示制御プログラム及び車載システム |
| DE102020201519B4 (de) * | 2020-02-07 | 2023-08-24 | Volkswagen Aktiengesellschaft | Verfahren und Vorrichtung zum Betreiben einer visuellen Schnittstelle zwischen einem Fahrzeug und einem Fahrzeuginsassen |
| CN113460063A (zh) * | 2020-03-30 | 2021-10-01 | 本田技研工业株式会社 | 信息提供装置、信息提供方法及存储介质 |
| CN111459148B (zh) * | 2020-04-03 | 2023-12-22 | 北京四维智联科技有限公司 | 一种信息处理方法及装置 |
| DE102020211301A1 (de) | 2020-09-09 | 2022-03-10 | Volkswagen Aktiengesellschaft | Verfahren zur Darstellung eines virtuellen Elements |
| US11548522B2 (en) * | 2021-02-08 | 2023-01-10 | GM Global Technology Operations LLC | Speed difference indicator on head up display |
| JP2022184350A (ja) * | 2021-06-01 | 2022-12-13 | マツダ株式会社 | ヘッドアップディスプレイ装置 |
| JP2023017641A (ja) * | 2021-07-26 | 2023-02-07 | トヨタ自動車株式会社 | 車両用表示制御装置、車両用表示装置、車両用表示制御方法及び車両用表示制御プログラム |
| JP2023035243A (ja) * | 2021-08-31 | 2023-03-13 | トヨタ自動車株式会社 | 車両用表示制御装置、車両用表示制御方法及び車両用表示制御プログラム |
| JP2023047174A (ja) * | 2021-09-24 | 2023-04-05 | トヨタ自動車株式会社 | 車両用表示制御装置、車両用表示装置、車両、車両用表示制御方法及びプログラム |
| CN113918112A (zh) * | 2021-10-12 | 2022-01-11 | 上海仙塔智能科技有限公司 | Hud的显示处理方法、装置、电子设备与存储介质 |
| CN113815415A (zh) * | 2021-10-12 | 2021-12-21 | 上海仙塔智能科技有限公司 | 驾驶引导的处理方法、装置、电子设备与存储介质 |
| US11697346B1 (en) * | 2022-03-29 | 2023-07-11 | GM Global Technology Operations LLC | Lane position in augmented reality head-up display system |
Family Cites Families (84)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10021770A1 (de) * | 2000-05-04 | 2001-11-08 | Zahnradfabrik Friedrichshafen | Verfahren zur Steuerung eines Automatgetriebes für ein Kraftfahrzeug |
| JP3933929B2 (ja) * | 2001-12-28 | 2007-06-20 | アルパイン株式会社 | ナビゲーション装置 |
| DE602004029908D1 (de) * | 2003-09-01 | 2010-12-16 | Panasonic Corp | Einrichtung und verfahren zur anzeige der position eines beweglichen objekts |
| US7561966B2 (en) * | 2003-12-17 | 2009-07-14 | Denso Corporation | Vehicle information display system |
| JP4305318B2 (ja) * | 2003-12-17 | 2009-07-29 | 株式会社デンソー | 車両情報表示システム |
| JP4246084B2 (ja) * | 2004-02-17 | 2009-04-02 | 日産自動車株式会社 | 車両用走行制御装置 |
| US7526103B2 (en) * | 2004-04-15 | 2009-04-28 | Donnelly Corporation | Imaging system for vehicle |
| JP4082388B2 (ja) * | 2004-06-01 | 2008-04-30 | トヨタ自動車株式会社 | 走行制御装置 |
| US8521411B2 (en) * | 2004-06-03 | 2013-08-27 | Making Virtual Solid, L.L.C. | En-route navigation display method and apparatus using head-up display |
| US8751156B2 (en) * | 2004-06-30 | 2014-06-10 | HERE North America LLC | Method of operating a navigation system using images |
| AU2004203830A1 (en) * | 2004-08-12 | 2006-03-02 | Stephen Petrik | GPS based vehicle monitoring and management with biometric enabled smart card, intelligent speed adaptation |
| US8195386B2 (en) * | 2004-09-28 | 2012-06-05 | National University Corporation Kumamoto University | Movable-body navigation information display method and movable-body navigation information display unit |
| JP4274111B2 (ja) * | 2004-12-02 | 2009-06-03 | 株式会社デンソー | 適正車間距離表示制御装置 |
| JP4779355B2 (ja) * | 2004-12-21 | 2011-09-28 | 日産自動車株式会社 | 車両用運転操作補助装置用の表示装置および表示方法 |
| US8577593B2 (en) * | 2005-08-18 | 2013-11-05 | General Motors Llc | Navigation system for hearing-impaired operators |
| JP2007121001A (ja) * | 2005-10-26 | 2007-05-17 | Matsushita Electric Ind Co Ltd | ナビゲーション装置 |
| JP4887980B2 (ja) * | 2005-11-09 | 2012-02-29 | 日産自動車株式会社 | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| US8085140B2 (en) * | 2006-09-04 | 2011-12-27 | Panasonic Corporation | Travel information providing device |
| JP4420011B2 (ja) * | 2006-11-16 | 2010-02-24 | 株式会社日立製作所 | 物体検知装置 |
| JP2008309529A (ja) * | 2007-06-12 | 2008-12-25 | Panasonic Corp | ナビゲーション装置、ナビゲーション方法、及びナビゲーション用プログラム |
| JP4475308B2 (ja) * | 2007-09-18 | 2010-06-09 | 株式会社デンソー | 表示装置 |
| JP4985362B2 (ja) * | 2007-11-30 | 2012-07-25 | アイシン・エィ・ダブリュ株式会社 | ナビゲーション装置、ナビゲーション方法およびナビゲーションプログラム |
| JP4480755B2 (ja) * | 2007-12-04 | 2010-06-16 | カルソニックカンセイ株式会社 | 車両用ヘッドアップディスプレイ装置 |
| JP5160564B2 (ja) * | 2007-12-05 | 2013-03-13 | ボッシュ株式会社 | 車両情報表示装置 |
| US8009024B2 (en) * | 2008-01-25 | 2011-08-30 | Denso Corporation | Automotive display device showing virtual image spot encircling front obstacle |
| JP5349898B2 (ja) * | 2008-10-21 | 2013-11-20 | アルパイン株式会社 | 車載用ナビゲーション装置及び地図表示方法 |
| WO2010099416A1 (en) * | 2009-02-27 | 2010-09-02 | Magna Electronics | Alert system for vehicle |
| JP5561965B2 (ja) * | 2009-07-28 | 2014-07-30 | アルパイン株式会社 | ナビゲーション装置および誘導経路探索方法 |
| US8503762B2 (en) * | 2009-08-26 | 2013-08-06 | Jacob Ben Tzvi | Projecting location based elements over a heads up display |
| SE534828C2 (sv) * | 2009-09-14 | 2012-01-10 | Scania Cv Ab | Metod för bestämning av växlingspunkter |
| JP5286214B2 (ja) * | 2009-09-30 | 2013-09-11 | 日立オートモティブシステムズ株式会社 | 車両制御装置 |
| JP2011079345A (ja) * | 2009-10-02 | 2011-04-21 | Denso Corp | 車両用ヘッドアップディスプレイ |
| US9165468B2 (en) * | 2010-04-12 | 2015-10-20 | Robert Bosch Gmbh | Video based intelligent vehicle control system |
| US8514099B2 (en) * | 2010-10-13 | 2013-08-20 | GM Global Technology Operations LLC | Vehicle threat identification on full windshield head-up display |
| WO2012060002A1 (ja) * | 2010-11-04 | 2012-05-10 | トヨタ自動車株式会社 | 情報提供装置 |
| US8686872B2 (en) * | 2010-12-29 | 2014-04-01 | GM Global Technology Operations LLC | Roadway condition warning on full windshield head-up display |
| US8924150B2 (en) * | 2010-12-29 | 2014-12-30 | GM Global Technology Operations LLC | Vehicle operation and control system for autonomous vehicles on full windshield display |
| CN103328299B (zh) * | 2010-12-29 | 2016-04-06 | 沃尔沃拉斯特瓦格纳公司 | 自适应巡航控制及用于控制装备有自适应巡航控制系统的机动车辆的速度的方法 |
| WO2012118858A2 (en) * | 2011-02-28 | 2012-09-07 | Cummins Intellectual Property, Inc. | System and method of dpf passive enhancement through powertrain torque-speed management |
| DE102011007329A1 (de) | 2011-04-13 | 2012-10-18 | Robert Bosch Gmbh | Verfahren zum Betreiben eines Kraftfahrzeugs, Vorrichtung |
| EP2720899B1 (de) * | 2011-06-17 | 2017-08-09 | Robert Bosch GmbH | Verfahren und anzeigeeinrichtung zum anzeigen eines fahrzustands eines fahrzeugs und entsprechendes computer-programprodukt |
| JP2013078964A (ja) * | 2011-09-30 | 2013-05-02 | Toshiba Corp | 表示装置及び表示方法 |
| US9383579B2 (en) * | 2011-10-12 | 2016-07-05 | Visteon Global Technologies, Inc. | Method of controlling a display component of an adaptive display system |
| CN104040607B (zh) * | 2012-01-12 | 2016-04-27 | 本田技研工业株式会社 | 同步行驶辅助装置及同步行驶辅助系统 |
| JP2013237290A (ja) * | 2012-05-11 | 2013-11-28 | Toyota Motor Corp | 表示制御装置、車両制御装置および車両 |
| US9823742B2 (en) * | 2012-05-18 | 2017-11-21 | Microsoft Technology Licensing, Llc | Interaction and management of devices using gaze detection |
| DE102012216144A1 (de) * | 2012-09-12 | 2014-05-28 | Bayerische Motoren Werke Aktiengesellschaft | Kontaktanaloge Anzeige insbesondere eines Fahrspurwechsels |
| JP5622818B2 (ja) * | 2012-09-28 | 2014-11-12 | 富士重工業株式会社 | 視線誘導システム |
| JP5492962B2 (ja) * | 2012-09-28 | 2014-05-14 | 富士重工業株式会社 | 視線誘導システム |
| US8712663B1 (en) * | 2012-10-31 | 2014-04-29 | GM Global Technology Operations LLC | Systems and methods for vehicle cruise control |
| US20150367859A1 (en) * | 2012-12-21 | 2015-12-24 | Harman Becker Automotive Systems Gmbh | Input device for a motor vehicle |
| US20160054563A9 (en) * | 2013-03-14 | 2016-02-25 | Honda Motor Co., Ltd. | 3-dimensional (3-d) navigation |
| US9251715B2 (en) * | 2013-03-15 | 2016-02-02 | Honda Motor Co., Ltd. | Driver training system using heads-up display augmented reality graphics elements |
| US10215583B2 (en) * | 2013-03-15 | 2019-02-26 | Honda Motor Co., Ltd. | Multi-level navigation monitoring and control |
| US9393870B2 (en) * | 2013-03-15 | 2016-07-19 | Honda Motor Co., Ltd. | Volumetric heads-up display with dynamic focal plane |
| JP6056612B2 (ja) * | 2013-03-29 | 2017-01-11 | アイシン精機株式会社 | 画像表示制御装置および画像表示システム |
| JP2014211431A (ja) * | 2013-04-02 | 2014-11-13 | 株式会社Jvcケンウッド | ナビゲーション装置、及び、表示制御方法 |
| EP2817591A4 (en) * | 2013-04-15 | 2015-10-07 | Flextronics Ap Llc | CHANGE OF BEHAVIOR BY CHANGED ASSIGNMENT ROUTES BASED ON USER PROFILE INFORMATION |
| JP6176478B2 (ja) * | 2013-04-26 | 2017-08-09 | 日本精機株式会社 | 車両情報投影システム |
| US9536325B2 (en) * | 2013-06-09 | 2017-01-03 | Apple Inc. | Night mode |
| JP6094399B2 (ja) * | 2013-06-24 | 2017-03-15 | 株式会社デンソー | ヘッドアップディスプレイ、及びプログラム |
| US9827907B2 (en) * | 2013-07-05 | 2017-11-28 | Clarion Co., Ltd. | Drive assist device |
| JP6236954B2 (ja) * | 2013-07-23 | 2017-11-29 | アイシン・エィ・ダブリュ株式会社 | 運転支援システム、方法およびプログラム |
| GB201316608D0 (en) * | 2013-09-18 | 2013-10-30 | Tomtom Int Bv | Apparatus and method for single vehicle economy improvement |
| KR20150034997A (ko) * | 2013-09-27 | 2015-04-06 | 네이버 주식회사 | 경로 안내에 따른 목적지를 명확히 인지시켜 주기 위한 방법 및 그 시스템 |
| US9639990B2 (en) * | 2013-10-03 | 2017-05-02 | Panasonic Intellectual Property Management Co., Ltd. | Display control apparatus, computer-implemented method, storage medium, and projection apparatus |
| US20160216521A1 (en) * | 2013-10-22 | 2016-07-28 | Nippon Seiki Co., Ltd. | Vehicle information projection system and projection device |
| JP6537780B2 (ja) * | 2014-04-09 | 2019-07-03 | 日立オートモティブシステムズ株式会社 | 走行制御装置、車載用表示装置、及び走行制御システム |
| US9677898B2 (en) * | 2014-06-17 | 2017-06-13 | Think Ware Corporation | Electronic apparatus and control method thereof |
| KR101583950B1 (ko) * | 2014-06-30 | 2016-01-08 | 현대자동차주식회사 | 차량정보 표시장치 및 그 표시방법 |
| EP3150443B1 (en) * | 2014-07-01 | 2019-08-21 | Nissan Motor Co., Ltd | Display device for vehicle and display method for vehicle |
| JP2016033729A (ja) * | 2014-07-31 | 2016-03-10 | クラリオン株式会社 | 周囲環境認識装置 |
| JP6123761B2 (ja) * | 2014-09-05 | 2017-05-10 | トヨタ自動車株式会社 | 車両用表示装置 |
| DE102015217391B4 (de) * | 2014-09-12 | 2021-09-30 | Yazaki Corporation | Fahrzeuginterne Anzeigevorrichtung |
| WO2016045119A1 (zh) * | 2014-09-28 | 2016-03-31 | 华为技术有限公司 | 一种导航方法及终端 |
| US9874456B2 (en) * | 2014-11-28 | 2018-01-23 | Here Global B.V. | Method, apparatus and computer program product for providing a destination preview |
| US10127726B2 (en) * | 2014-12-01 | 2018-11-13 | Thinkware Corporation | Electronic apparatus, control method thereof, computer program, and computer-readable recording medium |
| CN107004361B (zh) * | 2014-12-09 | 2020-03-27 | 三菱电机株式会社 | 碰撞风险计算装置、碰撞风险显示装置以及车体控制装置 |
| JP6485732B2 (ja) * | 2014-12-10 | 2019-03-20 | 株式会社リコー | 情報提供装置、情報提供方法及び情報提供用制御プログラム |
| US10234297B2 (en) * | 2014-12-10 | 2019-03-19 | Here Global B.V. | Apparatus and associated method for providing U-turn guidance |
| EP3031656B1 (en) * | 2014-12-10 | 2018-01-03 | Ricoh Company, Ltd. | Information provision device, information provision method, and carrier medium storing information provision program |
| DE102015000856A1 (de) * | 2015-01-24 | 2016-07-28 | Audi Ag | Verfahren zum Betreiben eines Kraftfahrzeugs und Kraftfahrzeug |
| JP6661883B2 (ja) | 2015-02-09 | 2020-03-11 | 株式会社デンソー | 車両用表示制御装置及び車両用表示制御方法 |
| JP6516298B2 (ja) * | 2016-05-06 | 2019-05-22 | トヨタ自動車株式会社 | 情報表示装置 |
-
2015
- 2015-02-09 JP JP2015023622A patent/JP6661883B2/ja active Active
-
2016
- 2016-02-01 US US15/549,491 patent/US10197414B2/en active Active
- 2016-02-01 WO PCT/JP2016/000489 patent/WO2016129234A1/ja active Application Filing
-
2018
- 2018-06-20 US US16/013,223 patent/US10663315B2/en active Active
- 2018-12-18 US US16/223,710 patent/US20190120646A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| US20180299286A1 (en) | 2018-10-18 |
| JP2016145783A (ja) | 2016-08-12 |
| WO2016129234A1 (ja) | 2016-08-18 |
| US20190120646A1 (en) | 2019-04-25 |
| US10663315B2 (en) | 2020-05-26 |
| US10197414B2 (en) | 2019-02-05 |
| US20180023970A1 (en) | 2018-01-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6661883B2 (ja) | 車両用表示制御装置及び車両用表示制御方法 | |
| US10254539B2 (en) | On-vehicle device, method of controlling on-vehicle device, and computer-readable storage medium | |
| US10387734B2 (en) | Vehicle display control device and vehicle display control method | |
| US20180024354A1 (en) | Vehicle display control device and vehicle display unit | |
| US20160304126A1 (en) | Vehicle control device | |
| JP2017123007A (ja) | 運転支援装置 | |
| JP2022179574A (ja) | 表示制御装置及び表示制御プログラム | |
| WO2022044768A1 (ja) | 車両用表示装置 | |
| JP6705335B2 (ja) | 車両用表示制御装置及び車両運転アシストシステム | |
| JP2017166913A (ja) | 表示制御装置及び表示制御方法 | |
| US11850940B2 (en) | Display control device and non-transitory computer-readable storage medium for display control on head-up display | |
| WO2020189238A1 (ja) | 車両用表示制御装置、車両用表示制御方法、車両用表示制御プログラム | |
| JP6631572B2 (ja) | 車両用表示制御装置及び車両用表示ユニット | |
| JP2020095044A (ja) | 表示制御装置及び表示制御方法 | |
| WO2022201972A1 (ja) | 車両用制御装置及び車両用制御方法 | |
| WO2016129219A1 (ja) | 車両用表示制御装置及び車両用表示ユニット | |
| JP2021020519A (ja) | 車両用表示制御装置および車両用表示制御方法 | |
| JP6973462B2 (ja) | 車両用表示制御装置 | |
| JP7014254B2 (ja) | 車両用表示制御装置及び車両用表示制御方法 | |
| JP7092158B2 (ja) | 表示制御装置及び表示制御プログラム | |
| JP2020138609A (ja) | 車両用表示制御装置、車両用表示制御方法、車両用表示制御プログラム | |
| JP7259802B2 (ja) | 表示制御装置、表示制御プログラム及び車載システム | |
| JP7310851B2 (ja) | 車両用表示装置 | |
| WO2023026707A1 (ja) | 車両用制御装置及び車両用制御方法 | |
| JP7255443B2 (ja) | 表示制御装置及び表示制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170307 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171030 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190108 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190213 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190806 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191105 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20191113 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200114 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200127 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6661883 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |