JP6318552B2 - 角速度センサー、電子機器および移動体 - Google Patents
角速度センサー、電子機器および移動体 Download PDFInfo
- Publication number
- JP6318552B2 JP6318552B2 JP2013226533A JP2013226533A JP6318552B2 JP 6318552 B2 JP6318552 B2 JP 6318552B2 JP 2013226533 A JP2013226533 A JP 2013226533A JP 2013226533 A JP2013226533 A JP 2013226533A JP 6318552 B2 JP6318552 B2 JP 6318552B2
- Authority
- JP
- Japan
- Prior art keywords
- detection
- angular velocity
- rotational vibration
- velocity sensor
- base
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 claims description 187
- 238000006073 displacement reaction Methods 0.000 claims description 9
- 230000009471 action Effects 0.000 claims description 3
- 239000000758 substrate Substances 0.000 description 34
- 230000000694 effects Effects 0.000 description 14
- 230000002238 attenuated effect Effects 0.000 description 13
- 238000005452 bending Methods 0.000 description 12
- 239000000463 material Substances 0.000 description 12
- 230000006870 function Effects 0.000 description 10
- 238000000034 method Methods 0.000 description 10
- 239000000853 adhesive Substances 0.000 description 6
- 230000001070 adhesive effect Effects 0.000 description 6
- 239000010931 gold Substances 0.000 description 6
- 229910052751 metal Inorganic materials 0.000 description 6
- 239000002184 metal Substances 0.000 description 6
- 230000003321 amplification Effects 0.000 description 5
- 238000013016 damping Methods 0.000 description 5
- 238000003384 imaging method Methods 0.000 description 5
- 238000003199 nucleic acid amplification method Methods 0.000 description 5
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 230000005489 elastic deformation Effects 0.000 description 4
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 4
- 229910052737 gold Inorganic materials 0.000 description 4
- 239000003566 sealing material Substances 0.000 description 4
- 229910052709 silver Inorganic materials 0.000 description 4
- 239000004332 silver Substances 0.000 description 4
- 230000001629 suppression Effects 0.000 description 4
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 3
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 3
- 238000013459 approach Methods 0.000 description 3
- 239000011651 chromium Substances 0.000 description 3
- 238000004891 communication Methods 0.000 description 3
- 239000000470 constituent Substances 0.000 description 3
- 239000010949 copper Substances 0.000 description 3
- 230000005484 gravity Effects 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 239000011347 resin Substances 0.000 description 3
- 229920005989 resin Polymers 0.000 description 3
- 239000010936 titanium Substances 0.000 description 3
- 238000003466 welding Methods 0.000 description 3
- 239000004925 Acrylic resin Substances 0.000 description 2
- 229920000178 Acrylic resin Polymers 0.000 description 2
- 229910001020 Au alloy Inorganic materials 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- -1 Kovar Chemical class 0.000 description 2
- 230000002411 adverse Effects 0.000 description 2
- 239000000956 alloy Substances 0.000 description 2
- 230000001413 cellular effect Effects 0.000 description 2
- 229910052804 chromium Inorganic materials 0.000 description 2
- 239000011231 conductive filler Substances 0.000 description 2
- 229910052802 copper Inorganic materials 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 239000013078 crystal Substances 0.000 description 2
- 230000002708 enhancing effect Effects 0.000 description 2
- 239000003822 epoxy resin Substances 0.000 description 2
- 238000005530 etching Methods 0.000 description 2
- 239000003353 gold alloy Substances 0.000 description 2
- 229910000833 kovar Inorganic materials 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 239000007769 metal material Substances 0.000 description 2
- 239000002923 metal particle Substances 0.000 description 2
- 239000010955 niobium Substances 0.000 description 2
- 229910052697 platinum Inorganic materials 0.000 description 2
- 229920000647 polyepoxide Polymers 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 239000010453 quartz Substances 0.000 description 2
- 238000000926 separation method Methods 0.000 description 2
- 230000035939 shock Effects 0.000 description 2
- 229910052710 silicon Inorganic materials 0.000 description 2
- 239000010703 silicon Substances 0.000 description 2
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 2
- 229910000679 solder Inorganic materials 0.000 description 2
- 239000010935 stainless steel Substances 0.000 description 2
- 229910001220 stainless steel Inorganic materials 0.000 description 2
- 229910052719 titanium Inorganic materials 0.000 description 2
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 description 2
- 229910052721 tungsten Inorganic materials 0.000 description 2
- 239000010937 tungsten Substances 0.000 description 2
- WSMQKESQZFQMFW-UHFFFAOYSA-N 5-methyl-pyrazole-3-carboxylic acid Chemical compound CC1=CC(C(O)=O)=NN1 WSMQKESQZFQMFW-UHFFFAOYSA-N 0.000 description 1
- 241000251468 Actinopterygii Species 0.000 description 1
- 229910001316 Ag alloy Inorganic materials 0.000 description 1
- 229910000838 Al alloy Inorganic materials 0.000 description 1
- 229910000851 Alloy steel Inorganic materials 0.000 description 1
- VYZAMTAEIAYCRO-UHFFFAOYSA-N Chromium Chemical compound [Cr] VYZAMTAEIAYCRO-UHFFFAOYSA-N 0.000 description 1
- 229910000599 Cr alloy Inorganic materials 0.000 description 1
- WQZGKKKJIJFFOK-GASJEMHNSA-N Glucose Natural products OC[C@H]1OC(O)[C@H](O)[C@@H](O)[C@@H]1O WQZGKKKJIJFFOK-GASJEMHNSA-N 0.000 description 1
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 1
- ZOKXTWBITQBERF-UHFFFAOYSA-N Molybdenum Chemical compound [Mo] ZOKXTWBITQBERF-UHFFFAOYSA-N 0.000 description 1
- 239000004642 Polyimide Substances 0.000 description 1
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 1
- 229910045601 alloy Inorganic materials 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- JRPBQTZRNDNNOP-UHFFFAOYSA-N barium titanate Chemical compound [Ba+2].[Ba+2].[O-][Ti]([O-])([O-])[O-] JRPBQTZRNDNNOP-UHFFFAOYSA-N 0.000 description 1
- 229910002113 barium titanate Inorganic materials 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 239000008280 blood Substances 0.000 description 1
- 210000004369 blood Anatomy 0.000 description 1
- 230000036772 blood pressure Effects 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 239000003795 chemical substances by application Substances 0.000 description 1
- 239000000788 chromium alloy Substances 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 229910017052 cobalt Inorganic materials 0.000 description 1
- 239000010941 cobalt Substances 0.000 description 1
- GUTLYIVDDKVIGB-UHFFFAOYSA-N cobalt atom Chemical compound [Co] GUTLYIVDDKVIGB-UHFFFAOYSA-N 0.000 description 1
- 239000007772 electrode material Substances 0.000 description 1
- 239000008103 glucose Substances 0.000 description 1
- 239000011261 inert gas Substances 0.000 description 1
- 238000010030 laminating Methods 0.000 description 1
- GQYHUHYESMUTHG-UHFFFAOYSA-N lithium niobate Chemical compound [Li+].[O-][Nb](=O)=O GQYHUHYESMUTHG-UHFFFAOYSA-N 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 150000002739 metals Chemical class 0.000 description 1
- 229910052750 molybdenum Inorganic materials 0.000 description 1
- 239000011733 molybdenum Substances 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- 229910052758 niobium Inorganic materials 0.000 description 1
- GUCVJGMIXFAOAE-UHFFFAOYSA-N niobium atom Chemical compound [Nb] GUCVJGMIXFAOAE-UHFFFAOYSA-N 0.000 description 1
- TWNQGVIAIRXVLR-UHFFFAOYSA-N oxo(oxoalumanyloxy)alumane Chemical compound O=[Al]O[Al]=O TWNQGVIAIRXVLR-UHFFFAOYSA-N 0.000 description 1
- 238000007747 plating Methods 0.000 description 1
- 229920001721 polyimide Polymers 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 229920006395 saturated elastomer Polymers 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- VSZWPYCFIRKVQL-UHFFFAOYSA-N selanylidenegallium;selenium Chemical compound [Se].[Se]=[Ga].[Se]=[Ga] VSZWPYCFIRKVQL-UHFFFAOYSA-N 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 230000005236 sound signal Effects 0.000 description 1
- JBQYATWDVHIOAR-UHFFFAOYSA-N tellanylidenegermanium Chemical compound [Te]=[Ge] JBQYATWDVHIOAR-UHFFFAOYSA-N 0.000 description 1
- RIUWBIIVUYSTCN-UHFFFAOYSA-N trilithium borate Chemical compound [Li+].[Li+].[Li+].[O-]B([O-])[O-] RIUWBIIVUYSTCN-UHFFFAOYSA-N 0.000 description 1
Images
















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5607—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating tuning forks
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5607—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating tuning forks
- G01C19/5621—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating tuning forks the devices involving a micromechanical structure
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P3/00—Measuring linear or angular speed; Measuring differences of linear or angular speeds
- G01P3/02—Devices characterised by the use of mechanical means
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Gyroscopes (AREA)
Description
例えば、特許文献1に記載の角速度センサーは、枠体に対して振動体支持梁を介して支持されている振動体を有する。この角速度センサーでは、振動体をX軸方向に振動(駆動振動)させた状態で、外部からZ軸まわりの角速度が加わると、振動体にコリオリ力が作用することにより、振動体がY軸方向に変位(検出振動)する。そして、この振動体のY軸方向の変位量を検出することにより、Z軸まわりの角速度を検出する。
そこで、特許文献1に記載の角速度センサーでは、枠体が支持部に対して枠体支持梁を介して支持されており、枠体および枠体支持梁が振動体の振動方向および検出方向のうちの少なくとも1つの方向に沿った衝撃が支持部から振動体に伝わるのを減衰する衝撃減衰機構を構成している。これにより、振動体の振動方向および検出方向について、角速度センサーに加わる衝撃の波形が振動体の共振周波数に近い振動を含んでいても、検出精度への影響を抑制することができる。
[適用例1]
本発明の角速度センサーは、固定部と、
基部と、
前記固定部に対して前記基部を支持する支持部と、
前記基部に接続されている振動部と、
前記基部に接続されていて、検出軸まわりの角速度に応じたコリオリ力の作用により振動する検出部と、を備え、
検出周波数帯域の幅をf1[Hz]とし、前記支持部の変形を伴って前記基部が前記固定部に対して前記検出軸まわりに回転振動する第1の回転振動モードの共振周波数をf2[Hz]とし、離調周波数をf3[Hz]とし、前記第1の回転振動モードと逆相であり、かつ、前記支持部の変形を伴って前記基部が前記固定部に対して前記検出軸まわりに回転振動する第2の回転振動モードの共振周波数をf4としたとき、
f1<f2<f3<f4の関係、または、f1<f2<f4<f3の関係を満たすことを特徴とする。
以上のことから、外部から検出軸まわりの回転振動を受けたとき、その回転振動の周波数が離調周波数f3付近であっても、出力の変動を抑制することができる。
本発明の角速度センサーでは、前記第1の回転振動モードは、1次の回転振動モードであり、
前記第2の回転振動モードは、2次の回転振動モードであることが好ましい。
これにより、基部の検出軸まわりの他の回転振動モードの共振周波数がf2よりも低周波数側に存在しないため、f1とf2との差を比較的小さくし、それに伴って、離調周波数f3も小さくすることができる。その結果、優れたS/N比を実現することができる。
本発明の角速度センサーでは、f1<f2<f3<f4の関係を満たすことが好ましい。
これにより、1次および2次の回転振動モードの重ね合せを利用して、外部からの検出軸まわりの回転振動を減衰させる効果を高めることができる。
本発明の角速度センサーでは、1.35≦f3/f2≦2.6の関係を満たすことが好ましい。
これにより、外部からの検出軸まわりの回転振動を抑制する効果を高めることができる。
本発明の角速度センサーでは、前記1次の回転振動モードのQ値が5以上100以下であることが好ましい。
これにより、1次および2次の回転振動モードの振動が大きくなりすぎて検出振動に悪影響を与えたり損傷の原因となったりするのを防止しつつ、外部からの検出軸まわりの回転振動を抑制する効果を高めることができる。また、外部からの検出軸まわりの回転振動をゼロまたはそれに近い値に減衰し得る領域を比較的大きくすることができる。
本発明の角速度センサーでは、f1/f2≦0.5の関係を満たすことが好ましい。
これにより、外部から検出軸まわりの回転振動を受けたとき、検出周波数帯域において、その回転振動の増幅を極めて小さくすることができる。
[適用例7]
本発明の角速度センサーでは、2≦f4/f2≦4の関係を満たすことが好ましい。
これにより、第1および第2の回転振動モードの重ね合せ領域において、外部からの検出軸まわりの回転振動を減衰させる効果を高めることができる。また、f2とf4との間の周波数帯域において、外部からの検出軸まわりの回転振動をゼロまたはそれに近い値に減衰し得る領域を広範囲にわたって形成することができる。
本発明の電子機器は、本発明の角速度センサーを備えていることを特徴とする。
これにより、優れた信頼性を有する電子機器を提供することができる。
[適用例9]
本発明の移動体は、本発明の角速度センサーを備えていることを特徴とする。
これにより、優れた信頼性を有する移動体を提供することができる。
1.角速度センサー
<第1実施形態>
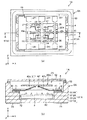
図1は、本発明の第1実施形態に係る角速度センサーの概略構成を示す断面図、図2は、図1に示す角速度センサーの平面図、図3は、図1に示す角速度センサーが備えるセンサー素子の平面図である。また、図4は、図3に示すセンサー素子の動作を説明するための平面図である。
図1および図2に示す角速度センサー1は、z軸まわりの角速度を検出する振動ジャイロセンサーである。この角速度センサー1は、センサー素子(振動片)2と、ICチップ3と、センサー素子2およびICチップ3を収納するパッケージ9とを有している。
(センサー素子)
センサー素子2は、z軸まわりの角速度を検出する「面外検出型」のセンサー素子である。このセンサー素子2は、図3に示すように、振動片20と、振動片20の表面に設けられた複数の検出電極(図示せず)、複数の駆動電極(図示せず)および複数の端子61〜66とを備える。
具体的に説明すると、振動片20は、基部21と、基部21を支持する支持部22と、基部21から延出した2つの検出用振動腕23、24および4つの駆動用振動腕25〜28とを有する。
基部21は、本体部211と、本体部211からx軸方向に沿って互いに反対側へ延出する1対の連結腕212、213とを有する。
駆動用振動腕25、26は、基部21の連結腕212の先端部からy軸方向に沿って互いに反対側へ延出している。同様に、駆動用振動腕27、28は、基部21の連結腕213の先端部からy軸方向に沿って互いに反対方向へ延出している。ここで、駆動用振動腕25、26、27、28は、基部21に接続されている「振動部」を構成している。
かかる圧電体材料としては、例えば、水晶、タンタル酸リチウム、ニオブ酸リチウム、ホウ酸リチウム、チタン酸バリウム等が挙げられる。特に、振動片20を構成する圧電体材料としては水晶(Zカット板)が好ましい。水晶で振動片20を構成すると、振動片20の振動特性(特に周波数温度特性)を優れたものとすることができる。また、エッチングにより高い寸法精度で振動片20を形成することができる。
このように構成されたセンサー素子2は、次のようにしてz軸まわりの角速度ωを検出する。
このように駆動用振動腕25〜28を駆動振動させた状態(駆動モード)で、センサー素子2にその重心Gを通る法線まわり(すなわちz軸まわり)の角速度ωが加わると、駆動用振動腕25〜28には、それぞれ、コリオリ力が働く。これにより、図4(b)に示すように、連結腕212、213を図中矢印Bに示す方向に屈曲振動し、これに伴い、この屈曲振動を打ち消すように、検出用振動腕23、24の図中矢印Cに示す方向の屈曲振動(検出振動)が励振される。
このように端子62、63、65、66から出力された電荷に基づいて、センサー素子2に加わった角速度ωを求めることができる。
図1および図2に示すICチップ3は、前述したセンサー素子2を駆動する機能と、センサー素子2からの出力(センサー出力)を検出する機能とを有する電子部品である。
このようなICチップ3は、図示しないが、センサー素子2を駆動する駆動回路と、センサー素子2からの出力(電荷)を検出する検出回路とを備える。
複数の接続端子31は、前述したセンサー素子2を駆動する駆動信号を出力する1つの接続端子31bと、センサー素子2からの検出信号が入力される2つの接続端子31aとを含む。
2つの接続端子31aは、一方の接続端子31aが配線70を介してセンサー素子2の端子63に電気的に接続され、他方の接続端子31aが配線70を介してセンサー素子2の端子66に電気的に接続されている。
一方、接続端子31bは、後述するパッケージ9のベース91に設けられた配線73を介して、センサー素子2の端子61に電気的に接続されている。
パッケージ9は、センサー素子2およびICチップ3を収納するものである。
パッケージ9は、上面に開放する凹部を有するベース91と、ベース91の凹部の開口を塞ぐようにベース91に接合部材93(シールリング)を介して接合されたリッド(蓋体)92とを有している。このようなパッケージ9は、その内側に収納空間Sを有しており、この収納空間S内に、センサー素子2およびICチップ3が気密的に収納、設置されている。
本実施形態では、図2に示すように、ベース91を平面視したときに、センサー素子2およびICチップ3がx軸方向に互いに並んで配置されている。
ベース91は、平板状の基板911と、基板911の上面に接合された平板状の基板912と、基板912の上面に接合された枠状の基板913と、基板913の上面に接合された枠状の914とで構成されている。
ベース91の構成材料(基板911〜914の各構成材料)としては、特に限定されないが、例えば、酸化アルミニウム等の各種セラミックスを用いることができる。
この複数の内部端子71は、ダミー用の2つの内部端子71aと、駆動信号用の1つの内部端子71bとを含む。
内部端子71bは、ベース91に設けられた配線73を介して1つの内部端子72に電気的に接続されている。
また、2つの内部端子71aおよび1つの内部端子71bを除く他の3つの内部端子71も、ベース91に設けられた配線(図示せず)を介して、対応する3つの内部端子72に電気的に接続されている。
このような複数(6つ)の内部端子71には、それぞれ、固定部材81を介してセンサー素子2が固定されている。
複数の内部端子72には、例えばボンディングワイヤーで構成された配線を介して、前述したICチップ3の複数の接続端子31(2つの接続端子31aを除く)が電気的に接続されている。
また、ベース91の基板912の上面には、例えばエポキシ樹脂、アクリル樹脂等を含んで構成された接着剤のような固定部材82により、前述したICチップ3が固定されている。これにより、ICチップ3がベース91に対して支持・固定されている。
この複数の外部端子74、75は、それぞれ、図示しない内部配線を介して、対応する内部端子72に電気的に接続されている。これにより、各外部端子74、75は、ICチップ3に電気的に接続されている。
このようなベース91には、接合部材93を介してリッド92が気密的に接合されている。これにより、パッケージ9内が気密封止されている。
また、接合部材93は、例えば、コバール、42アロイ、ステンレス鋼等の金属で構成されている。
ベース91とリッド92との接合方法としては、特に限定されないが、例えば、シーム溶接、レーザー溶接等の溶接方法等を用いることができる。
例えば、収納空間S内を減圧する場合、まず、封止材95により封止される前の貫通孔94を介して収納空間S内の空気を除去し、その状態を維持したまま、次いで、封止材95となる金属ボールを貫通孔94内に載置し、この金属ボールをレーザーにより溶融させることにより封止材95を形成し、貫通孔94を封止する。
前述したような構成を有する角速度センサー1は、図5(a)に示すように、基部21、検出用振動腕23、24および駆動用振動腕25、26、27、28からなる質量29が、バネ(弾性体)である梁部223、224、225、226を介して固定部221、222に支持されている振動系とみなすことができる。
より具体的には、図6(b)、(c)に示すように、1次の回転振動モードの共振周波数f2に対して高周波数側の周波数帯域(特にfω/f2が1.4以上となる帯域)では、f2とf4との間またはf4よりも高い周波数帯域において、1つの回転振動モードを用いるよりも効率的に(図7参照)、外部からの検出軸まわりの回転振動を減衰することができる。
すなわち、f2とf4との間の周波数帯域には、外部からの検出軸まわりの回転振動をゼロまたはそれに近い値に減衰し得る領域が存在する。したがって、かかる領域に離調周波数f3を設定すること、すなわち、f2<f3<f4の関係を満たすことにより、外部からの検出軸まわりの回転振動を極めて小さく減衰させることができる。また、離調周波数f3を比較的小さくすることができ、その結果、優れたS/N比を実現することができる。したがって、f1<f2<f3<f4の関係を満たすことにより、1次および2次の回転振動モードの重ね合せを利用して、外部からの検出軸まわりの回転振動を減衰させる効果を高めることができる。
また、f1<f2<f4<f3の関係を満たす場合において、離調周波数f3が大きくなりすぎるのを防止する観点から、f3/f2≦4の関係を満たすことが好ましく、f3/f2≦3.5の関係を満たすことがより好ましい。これにより、優れたS/N比を実現ことができる。
また、2≦f4/f2≦4の関係を満たすことが好ましく、2.5≦f4/f2≦3.5の関係を満たすことがより好ましい。これにより、第1および第2の回転振動モードの重ね合せ領域において、外部からの検出軸まわりの回転振動を減衰させる効果を高めることができる。また、f2とf4との間の周波数帯域において、外部からの検出軸まわりの回転振動をゼロまたはそれに近い値に減衰し得る領域を広範囲にわたって形成することができる。
また、具体的な離調周波数f3は、特に限定されないが、100Hz以上8.0kHz以下であることが好ましく、1.0kHz以上6.0kHz以下であることがより好ましく、2.0kHz以上3.0kH以下であることがさらに好ましい。
また、具体的な2次の回転振動モードの共振周波数f4は、f1、f2、f3に応じて設定されるものであり、特に限定されないが、100Hz以上10.0kHz以下であることが好ましい。
以上説明したような第1実施形態に係る角速度センサー1によれば、回転振動モードの共振周波数f2を離調周波数f3よりも小さくすることにより、外部から検出軸まわりの回転振動を受けたとき、その回転振動を離調周波数f3付近の周波数帯域において減衰させることができる。
以上のことから、外部から検出軸まわりの回転振動を受けたとき、その回転振動の周波数が離調周波数f3付近であっても、出力の変動を抑制することができる。
次に、本発明の第2実施形態について説明する。
図8(a)は、本発明の第2実施形態に係る角速度センサーの概略構成を示す平面図、図8(b)は、図8(a)中のC−C線断面図である。また、図9は、図8に示す角速度センサーが備える支持部を説明するための裏面図である。
本実施形態の角速度センサー1Aは、センサー素子2Aと、ICチップ3と、センサー素子2AおよびICチップ3を収納するパッケージ9と、センサー素子2Aをパッケージ9に対して支持する支持部材4とを有している。
振動片20Aは、基部21と、基部21から延出した2つの検出用振動腕23、24および4つの駆動用振動腕25〜28とを有する。
このような振動片20Aの基部21の本体部211には、複数の端子67が設けられている。この複数の端子67は、前述した第1実施形態の複数の端子61〜66と同様に、図示しない配線を介して、検出用振動腕23、24に設けられた検出電極および駆動用振動腕25〜28に設けられた駆動電極に電気的に接続されている。
パッケージ9Aは、上面に開放する凹部を有するベース91Aと、ベース91Aの凹部の開口を塞ぐようにベース91Aに接合部材93(シールリング)を介して接合されたリッド(蓋体)92とを有している。
このようなベース91Aには、各基板911A、912A、913A、914A間に段差を有する凹部が形成されている。
このようなベース91Aの基板911A上面には、基板912A、913Aの開口部内に納まるように、固定部材82を介してICチップ3が支持・固定されている。
そして、基板914Aの上面には、複数の内部端子71および支持部材4を介してセンサー素子2Aが設置されている。
支持部材4は、絶縁性のフィルム41と、このフィルム41上に接合された複数の配線42a、42b、42c、42d、42e、42f(以下、これらの配線を総称して「配線42」ともいう)とを有する。ここで、フィルム41は、パッケージ9Aに対して固定設置された「固定部」を構成していると言える。また、配線42は、フィルム41に対して基部21を支持する「支持部」を構成していると言える。なお、支持部材4が「支持部」を構成し、パッケージ9Aまたはベース91Aが「固定部」を構成しているとも言える。また、前述した基部21の本体部211が「基部」を構成しているとも言える。
フィルム41の中央部には、デバイスホール411が形成され、各配線42は、フィルム41上からこのデバイスホール411側に延出し、その延出した部分がフィルム41側(ICチップ3とは反対側)に折り曲げられている。
以上説明したように構成された角速度センサー1Aにおいても、本体部211(基部)が複数の配線42を介してパッケージ9Aに支持されているため、複数の配線42の弾性変形を伴って本体部211がパッケージ9Aに対してz軸(検出軸)まわりに回動し得る。
次に、本発明の第3実施形態について説明する。
図10は、本発明の第3実施形態に係る角速度センサーの概略構成を示す平面図、図11は、図10に示す角速度センサーが備えるセンサー素子の動作を説明するための平面図である。また、図12(a)は、図12に示す角速度センサーの簡略化モデルを示す図、図12(b)は、1次の回転振動モード(モード1)を示す図、図12(c)は、2次の回転振動モード(モード2)を示す図である。
本実施形態の角速度センサー1Bは、センサー素子2Bと、ICチップ(図示せず)と、センサー素子2BおよびICチップを収納するパッケージ9Bとを有する。
振動片20Bは、基部21Bと、1対の駆動用振動腕25B、26Bと、1対の検出用振動腕23B、24Bと、支持部22Bとを有している。
このように端子62、63、65、66から出力された電荷に基づいて、センサー素子2Bに加わった角速度ωを求めることができる。
具体的に説明すると、前述したような構成を有する角速度センサー1Bは、図12(a)に示すように、基部21B、検出用振動腕23B、24Bおよび駆動用振動腕25B、26Bからなる質量29Bが、バネ(弾性体)である連結部223B、224B、225B、226Bを介して固定部221Bに支持されている振動系とみなすことができる。
次に、本発明の第4実施形態について説明する。
図13は、本発明の第4実施形態に係る角速度センサーの概略構成を示す平面図である。
以下、第4実施形態について、前述した実施形態との相違点を中心に説明し、同様の事項については、その説明を省略する。なお、前述した第1実施形態と同様の構成には、同一符号を付してある。
センサー素子2Cは、振動片20Cと、振動片20Cの表面に設けられた複数の検出電極(図示せず)、複数の駆動電極(図示せず)および複数の端子67とを備える。
振動片20Cは、基部21Bと、基部21Bから延出した2つの検出用振動腕23B、24Bおよび4つの駆動用振動腕25B、26Bとを有する。
このような振動片20Cの基部21Bには、複数の端子67が設けられている。
以上説明したように構成された角速度センサー1Cにおいても、基部21Bが複数の配線42を介してパッケージ9Cに支持されているため、複数の配線42の弾性変形を伴って基部21Bがパッケージ9Cに対してy軸(検出軸)まわりに回動し得る。
以上説明したような角速度センサーは、各種電子機器に組み込むことにより、信頼性に優れた電子機器を提供することができる。
図14は、本発明の電子機器を適用したモバイル型(またはノート型)のパーソナルコンピュータの一例を示す斜視図である。
このようなパーソナルコンピュータ1100には、ジャイロセンサーとして機能する前述した角速度センサー1が内蔵されている。
この図において、携帯電話機1200は、複数の操作ボタン1202、受話口1204および送話口1206を備え、操作ボタン1202と受話口1204との間には、表示部100が配置されている。
このような携帯電話機1200には、ジャイロセンサーとして機能する前述した角速度センサー1が内蔵されている。
ここで、通常のカメラは、被写体の光像により銀塩写真フィルムを感光するのに対し、ディジタルスチルカメラ1300は、被写体の光像をCCD(Charge Coupled Device)などの撮像素子により光電変換して撮像信号(画像信号)を生成する。
また、ケース1302の正面側(図中裏面側)には、光学レンズ(撮像光学系)やCCDなどを含む受光ユニット1304が設けられている。
撮影者が表示部に表示された被写体像を確認し、シャッタボタン1306を押下すると、その時点におけるCCDの撮像信号が、メモリ1308に転送・格納される。
このようなディジタルスチルカメラ1300には、ジャイロセンサーとして機能する前述した角速度センサー1が内蔵されている。
図17は、本発明の移動体(自動車)の一例を示す斜視図である。この図において、移動体1500は、車体1501と、4つの車輪1502とを有しており、車体1501に設けられた図示しない動力源(エンジン)によって車輪1502を回転させるように構成されている。このような移動体1500には、発振器10(振動子1)が内蔵されている。
このような移動体によれば、優れた信頼性を発揮することができる。
また、前述した実施形態では、センサー素子が4つまたは2つの駆動用振動腕および2つの検出用振動腕を備えるものを例に説明したが、これに限定されず、駆動用振動腕の数は、1つ、3つまたは5つ以上であってもよく、また、検出用振動腕の数は、1つまたは3つ以上であってもよい。
また、前述した実施形態では、駆動部および検出部がそれぞれ腕状をなす場合を例に説明したが、本発明は、これに限定されず、例えば、静電駆動方式や静電容量検出方式を用いる場合、駆動部や検出部が板状、櫛歯状等をなす部分を有していてもよい。
Claims (9)
- 基部と、
前記基部に接続されている振動部と、
前記基部に接続されていて、検出軸まわりの角速度に応じたコリオリ力の作用により振動する検出部と、
固定部と、
前記固定部および前記基部に接続されている支持部と、
前記検出部に電気的に接続されている検出回路と、を備え、
前記検出回路は、検出周波数帯域の幅をf1[Hz]に設定されており、
前記基部、前記振動部および前記検出部を含む質量部が、前記固定部の側の端部の変位方向と前記基部の側の端部の変位方向とが同方向である前記支持部の変形によって、前記固定部に対して前記検出軸まわりに回転振動する第1の回転振動モードの共振周波数がf2[Hz]であり、
前記振動部の共振周波数と前記検出部の共振周波数の差である離調周波数がf3[Hz]であり、
前記質量部が、前記固定部の側の端部の変位方向と前記基部の側の端部の変位方向とが逆方向である前記支持部の変形によって、前記固定部に対して前記検出軸まわりに回転振動する第2の回転振動モードの共振周波数がf4[Hz]であり、
かつ、f1<f2<f3<f4の関係、または、f1<f2<f4<f3の関係を満たすことを特徴とする角速度センサー。 - 前記第1の回転振動モードは、1次の回転振動モードであり、
前記第2の回転振動モードは、2次の回転振動モードである請求項1に記載の角速度センサー。 - f1<f2<f3<f4の関係を満たす請求項2に記載の角速度センサー。
- 1.35≦f3/f2≦2.6の関係を満たす請求項2または3に記載の角速度センサー。
- 前記1次の回転振動モードのQ値が5以上100以下である請求項2ないし4のいずれか1項に記載の角速度センサー。
- f1/f2≦0.5の関係を満たす請求項2ないし5のいずれか1項に記載の角速度センサー。
- 2≦f4/f2≦4の関係を満たす請求項2ないし6のいずれか1項に記載の角速度センサー。
- 請求項1ないし7のいずれか1項に記載の角速度センサーを備えていることを特徴とする電子機器。
- 請求項1ないし7のいずれか1項に記載の角速度センサーを備えていることを特徴とする移動体。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013226533A JP6318552B2 (ja) | 2013-10-31 | 2013-10-31 | 角速度センサー、電子機器および移動体 |
| US14/528,476 US9599469B2 (en) | 2013-10-31 | 2014-10-30 | Angular velocity sensor, electronic apparatus, and moving object |
| CN201410601641.2A CN104596494B (zh) | 2013-10-31 | 2014-10-30 | 角速度传感器、电子设备以及移动体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013226533A JP6318552B2 (ja) | 2013-10-31 | 2013-10-31 | 角速度センサー、電子機器および移動体 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015087287A JP2015087287A (ja) | 2015-05-07 |
| JP2015087287A5 JP2015087287A5 (ja) | 2016-12-08 |
| JP6318552B2 true JP6318552B2 (ja) | 2018-05-09 |
Family
ID=52993931
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013226533A Active JP6318552B2 (ja) | 2013-10-31 | 2013-10-31 | 角速度センサー、電子機器および移動体 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9599469B2 (ja) |
| JP (1) | JP6318552B2 (ja) |
| CN (1) | CN104596494B (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6255903B2 (ja) * | 2013-10-31 | 2018-01-10 | セイコーエプソン株式会社 | 角速度センサー、電子機器および移動体 |
| JP7226246B2 (ja) * | 2019-10-29 | 2023-02-21 | 株式会社デンソー | 角速度センサおよび角速度センサシステム |
| CN112087728B (zh) * | 2020-07-21 | 2022-01-14 | 华为技术有限公司 | 获取Wi-Fi指纹空间分布的方法、装置和电子设备 |
Family Cites Families (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4364385B2 (ja) | 1999-02-17 | 2009-11-18 | 日本碍子株式会社 | 振動型ジャイロスコープおよびその製造方法 |
| JP3666335B2 (ja) | 2000-01-14 | 2005-06-29 | 株式会社村田製作所 | 角速度センサ |
| JP2002071353A (ja) * | 2000-09-01 | 2002-03-08 | Ngk Insulators Ltd | 角速度測定装置 |
| JP2002268111A (ja) * | 2001-03-08 | 2002-09-18 | Canon Inc | 電子機器及びカメラ |
| JP3601822B2 (ja) * | 2002-09-11 | 2004-12-15 | 東洋通信機株式会社 | 双音さ型振動ジャイロセンサ |
| JP2004279373A (ja) | 2003-03-19 | 2004-10-07 | Denso Corp | 角速度検出装置 |
| JP4256727B2 (ja) | 2003-06-12 | 2009-04-22 | 富士通株式会社 | 振動ジャイロの支持構造 |
| JP4590853B2 (ja) | 2003-10-17 | 2010-12-01 | パナソニック株式会社 | 回転率センサおよび多軸検出型回転率センサ |
| JP4381354B2 (ja) * | 2004-09-10 | 2009-12-09 | セイコーエプソン株式会社 | 振動子の支持構造および物理量測定装置 |
| JP2006284551A (ja) * | 2005-02-23 | 2006-10-19 | Sony Corp | 振動型ジャイロセンサ |
| JP4595779B2 (ja) | 2005-10-12 | 2010-12-08 | 株式会社デンソー | 角速度センサ |
| JP4816273B2 (ja) | 2006-06-12 | 2011-11-16 | 株式会社デンソー | ジャイロセンサ |
| JP2008058258A (ja) | 2006-09-04 | 2008-03-13 | Epson Toyocom Corp | 振動ジャイロおよびその製造方法 |
| JP2008076263A (ja) | 2006-09-22 | 2008-04-03 | Matsushita Electric Ind Co Ltd | 複合センサ |
| JP4337866B2 (ja) * | 2006-11-10 | 2009-09-30 | セイコーエプソン株式会社 | アナログ回路、電子機器及びオペアンプ |
| JP4211840B2 (ja) * | 2006-11-10 | 2009-01-21 | セイコーエプソン株式会社 | 検出装置、センサ及び電子機器 |
| JP4449972B2 (ja) * | 2006-11-10 | 2010-04-14 | セイコーエプソン株式会社 | 検出装置、センサ及び電子機器 |
| JP5018028B2 (ja) * | 2006-11-10 | 2012-09-05 | セイコーエプソン株式会社 | 基準電圧供給回路、アナログ回路及び電子機器 |
| JP4915246B2 (ja) * | 2007-01-26 | 2012-04-11 | セイコーエプソン株式会社 | ジャイロモジュール |
| JP2009002735A (ja) * | 2007-06-20 | 2009-01-08 | Epson Toyocom Corp | 角速度検出装置 |
| JP2009150677A (ja) | 2007-12-19 | 2009-07-09 | Epson Toyocom Corp | 振動ジャイロ |
| JP2009276086A (ja) * | 2008-05-12 | 2009-11-26 | Toyota Motor Corp | 角速度検出装置 |
| JP4337943B2 (ja) | 2008-09-01 | 2009-09-30 | パナソニック株式会社 | 回転率センサ |
| JP5465500B2 (ja) * | 2008-10-20 | 2014-04-09 | 日本電産サンキョー株式会社 | 振れ補正機能付き光学ユニット、および振れ補正機能付き光学ユニットにおける振れ補正制御方法 |
| JP2010256332A (ja) | 2009-04-02 | 2010-11-11 | Seiko Epson Corp | 振動片、振動子および物理量検出装置 |
| JP2009162778A (ja) | 2009-04-20 | 2009-07-23 | Panasonic Corp | 回転率センサ |
| JP5560806B2 (ja) * | 2010-03-19 | 2014-07-30 | セイコーエプソン株式会社 | ジャイロ素子、ジャイロセンサー、および電子機器 |
| JP2011220997A (ja) * | 2010-03-26 | 2011-11-04 | Seiko Epson Corp | 物理量検出素子、物理量検出装置、および電子機器 |
| JP5552976B2 (ja) * | 2010-09-07 | 2014-07-16 | セイコーエプソン株式会社 | 角速度検出装置及び電子機器 |
| JP2013024721A (ja) * | 2011-07-21 | 2013-02-04 | Seiko Epson Corp | 振動ジャイロ素子、ジャイロセンサー及び電子機器 |
| JP2013030850A (ja) * | 2011-07-26 | 2013-02-07 | Seiko Epson Corp | 振動デバイスおよび電子機器 |
| JP2013033821A (ja) * | 2011-08-01 | 2013-02-14 | Seiko Epson Corp | 基板、電子デバイスおよび電子機器 |
| DE102013218571B4 (de) * | 2013-09-17 | 2025-05-28 | Volkswagen Aktiengesellschaft | Vorrichtung und Verfahren zur seitlichen Umfelderfassung eines Kraftfahrzeugs |
| JP6255903B2 (ja) * | 2013-10-31 | 2018-01-10 | セイコーエプソン株式会社 | 角速度センサー、電子機器および移動体 |
-
2013
- 2013-10-31 JP JP2013226533A patent/JP6318552B2/ja active Active
-
2014
- 2014-10-30 US US14/528,476 patent/US9599469B2/en active Active
- 2014-10-30 CN CN201410601641.2A patent/CN104596494B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN104596494B (zh) | 2019-08-06 |
| CN104596494A (zh) | 2015-05-06 |
| US9599469B2 (en) | 2017-03-21 |
| US20150114113A1 (en) | 2015-04-30 |
| JP2015087287A (ja) | 2015-05-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7786499B2 (ja) | 振動デバイス、電子機器および移動体 | |
| JP6464749B2 (ja) | 物理量センサー、電子機器および移動体 | |
| JP6519995B2 (ja) | 振動素子、振動素子の製造方法、振動子、ジャイロセンサー、電子機器および移動体 | |
| CN110333370B (zh) | 传感器元件、物理量传感器、电子设备以及移动体 | |
| JP6318550B2 (ja) | 振動片、角速度センサー、電子機器および移動体 | |
| JP2015087262A (ja) | 振動素子、振動子、電子機器および移動体 | |
| JP6255903B2 (ja) | 角速度センサー、電子機器および移動体 | |
| JP6318552B2 (ja) | 角速度センサー、電子機器および移動体 | |
| JP6167474B2 (ja) | センサーデバイスおよび電子機器 | |
| JP6051577B2 (ja) | 電子デバイスおよび電子機器 | |
| JP5838696B2 (ja) | センサー素子、センサー素子の製造方法、センサーデバイスおよび電子機器 | |
| JP2018165642A (ja) | 振動デバイス、電子機器および移動体 | |
| JP2013190303A (ja) | センサー素子、センサーデバイスおよび電子機器 | |
| JP6507565B2 (ja) | 電子デバイス、電子機器および移動体 | |
| JP6492536B2 (ja) | センサー素子、物理量センサー、電子機器および移動体 | |
| JP2016180612A (ja) | 振動デバイス、電子機器および移動体 | |
| JP2015099061A (ja) | 物理検出装置の製造方法、振動素子、物理検出装置および電子機器 | |
| JP2016044977A (ja) | センサー素子、センサーデバイス、電子機器および移動体 | |
| JP2018165632A (ja) | センサー、電子機器および移動体 | |
| JP6911446B2 (ja) | センサー素子、センサー、電子機器および移動体 | |
| JP2016085185A (ja) | センサー素子、物理量センサー、電子機器および移動体 | |
| JP6492537B2 (ja) | センサー素子、物理量センサー、電子機器および移動体 | |
| JP2019152460A (ja) | 振動デバイス、電子機器および移動体 | |
| JP2016170140A (ja) | 振動片、ジャイロセンサー、電子機器、および移動体 | |
| JP2015087145A (ja) | 振動素子、振動子、電子機器および移動体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20160617 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20160624 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161025 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161025 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170802 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171010 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171207 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171226 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180221 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180306 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180319 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6318552 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |