JP5557021B2 - 回転角検出装置 - Google Patents
回転角検出装置 Download PDFInfo
- Publication number
- JP5557021B2 JP5557021B2 JP2010166122A JP2010166122A JP5557021B2 JP 5557021 B2 JP5557021 B2 JP 5557021B2 JP 2010166122 A JP2010166122 A JP 2010166122A JP 2010166122 A JP2010166122 A JP 2010166122A JP 5557021 B2 JP5557021 B2 JP 5557021B2
- Authority
- JP
- Japan
- Prior art keywords
- rotation angle
- sin
- sine wave
- rotation
- rotor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/24471—Error correction
- G01D5/24476—Signal processing
Landscapes
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
- Control Of Electric Motors In General (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
Description
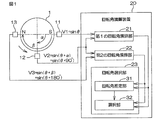
θ=tan−1(sinθ/cosθ)
=tan−1(sinθ/sin(θ+90°))
=tan−1(V1/V2)…(1)
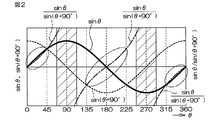
図2は、ロータ1の回転角θに対する、磁気センサ11,12の出力信号V1(=sinθ),V2(=sin(θ+90°))および前記式(1)の右辺におけるsinθ/sin(θ+90°)の変化を示している。
また、前述したような従来の回転角検出装置においては、磁気センサの出力信号に含まれるノイズの影響によって検出誤差が発生するおそれがある。そこで、このような検出誤差を低減させるために、磁気センサの出力信号に基づいて検出される回転角を時間方向に平均化することによって、最終的な回転角を求めることが考えられる。しかし、このようにすると、ロータが高速回転している場合には、回転角検出の応答性が悪くなる。

請求項2記載の発明は、前記最終回転角演算手段は、前記第1、第2および第3の回転角の平均値、前記第1、第2および第3の回転角の中央値または前記第1、第2および第3の回転角のうちの中央値と、他の2つの回転角のうち、前記中央値との差が小さいものとの平均値を、最終的な回転角として演算するように構成されている、請求項1に記載の回転角検出装置である。
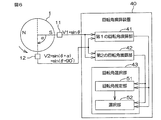
図1は、この発明の第1の実施形態に係る回転角検出装置の構成を示す模式図である。
この回転角検出装置は、たとえば、電動パワーステアリング装置のブラシレスモータのロータの回転角を検出するために用いることができる。回転角検出装置は、たとえば、ブラシレスモータの回転に応じて回転する検出用ロータ1(以下、「ロータ1」という)を有している。ロータ1は、2つの磁極N,Sを有する磁石を含んでいる。以上の点は、後述する第2および第3の実施形態に係る回転角検出装置も同様である。
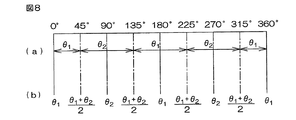
図2は、ロータ1の回転角θに対する、磁気センサ11,12の出力信号V1(=sinθ),V2(=sin(θ+90°))および前記式(2)の右辺におけるsinθ/sin(θ+90°)の変化を示している。sinθ/sin(θ+90°)の分母のsin(θ+90°)の絶対値が小さい場合には、tan−1(sinθ/sin(θ+90°))の演算誤差が大きくなり、第1の回転角θ1の演算誤差が大きくなる。したがって、図2に斜線部分で示すように、ロータ1の回転角θが、90°付近の範囲(たとえば、90°±22.5°の範囲)および270°付近の範囲(たとえば、270°±22.5°の範囲)では、sin(θ+90°)の絶対値が小さくなるので、第1の回転角θ1の演算誤差が大きくなる。
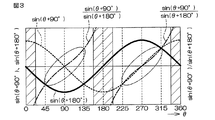
図3は、ロータ1の回転角θに対する、磁気センサ12,13の出力信号V2(=sin(θ+90°),V3(=sin(θ+180°))および前記式(3)の右辺におけるsin(θ+90°)/sin(θ+180°)の変化を示している。sin(θ+90°)/sin(θ+180°)の分母のsin(θ+180°)の絶対値が小さい場合には、tan−1{(sin(θ+90°)/sin(θ+180°)}の演算誤差が大きくなり、第2の回転角θ2の演算誤差が大きくなる。したがって、図3に斜線部分で示すように、ロータ1の回転角θが、0°付近の範囲(たとえば、0°〜22.5°の範囲)、180°付近の範囲(たとえば、180°±22.5°の範囲)および360°付近の範囲(たとえば、337.5〜360°の範囲)では、sin(θ+180°)の絶対値が小さくなるので、第2の回転角θ2の演算誤差が大きくなる。
図2および図3で説明したように、第1の回転角θ1と第2の回転角θ2とでは、演算誤差が大きくなる角度範囲が異なる。そこで、回転角選択部23は、たとえば、第1の回転角θ1と第2の回転角θ2とからロータ1の回転角を推定し、推定された回転角(回転角推定値)に応じて、第1の回転角θ1および第2の回転角θ2のうちから、演算誤差が小さい(演算精度が高い)と推定される方を、最終的な回転角θとして選択する。
θE=(θ1+θ2)/2 …(4)
選択部32は、回転角推定部31によって得られた回転角推定値θEを用い、次式(5)に示す条件式にしたがって、第1の回転角θ1および第2の回転角θ2のうちの一方を、最終的な回転角θとして選択する。
If 45°≦θE<135° then θ=θ2
If 135°≦θE<225° then θ=θ1
If 225°≦θE<315° then θ=θ2
If 315°≦θE<360° then θ=θ1 …(5)
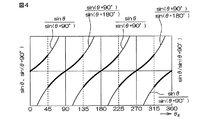
図4は、回転角推定値θEに対するsinθ/sin(θ+90°)の変化と、回転角推定値θEに対するsin(θ+90°)/sin(θ+180°)の変化とを示している。前述したように、tan−1{(sinθ°)/sin(θ+90°)}は、第1の回転角θ1を演算するために用いられ、tan−1{(sin(θ+90°)/sin(θ+180°)}は、第2の回転角θ2を演算するために用いられる。
回転角演算処理は、所定の演算周期毎に繰り返し行なわれる。まず、回転角演算装置20は、各磁気センサ11,12,13の出力信号V1(=sinθ),V2(=sin(θ+90°)),V3(=sin(θ+180°))を取り込む(ステップS1)。そして、回転角演算装置20の第1の回転角演算部21は、ステップS1で取り込まれた出力信号V1,V2を用い、前記式(2)に基づいて、第1の回転角θ1を演算する(ステップS2)。
また、回転角演算装置20の回転角選択部23は、第1の回転角θ1と第2の回転角θ2とに基づいて回転角推定値θEを演算する(ステップS4)。回転角選択部23は、たとえば、前記式(4)に基づいて、第1の回転角θ1と第2の回転角θ2の平均値を、回転角推定値θEとして求める。そして、回転角選択部23は、回転角推定値θEを用い、前記式(5)の条件式にしたがって、第1の回転角θ1および第2の回転角θ2のうちの一方を、最終的な回転角θとして選択する。(ステップS5)。
上記第1の実施形態では、磁気センサが3個設けられているが、磁気センサを4個以上設け、隣り合う2つのセンサの組毎にロータ1の回転角θに相当する回転角を演算することにより、最終的な回転角θの候補となる回転角を3種類以上求め、それらの回転角候補のうちの1つを、最終的な回転角θとして選択するようにしてもよい。
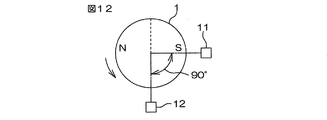
ロータ1の周囲には、2つの磁気センサ11,12が、ロータ1の周方向に間隔をおいて配置されている。これら2つの磁気センサ11,12を、それぞれ第1の磁気センサ11および第2の磁気センサ12という場合がある。第1の磁気センサ11と第2の磁気センサ12とは、ロータ1の回転中心軸を中心として、αの角度間隔をおいて配置されている。この実施形態では、αは90°に設定されている。
第1の実施形態において、図2を用いて説明したように、第2の実施形態においても、ロータ1の回転角θが、90°付近の範囲(たとえば、90°±22.5°の範囲)および270°付近の範囲(たとえば、270°±22.5°の範囲)では、第1の回転角θ1の演算誤差が大きくなる。
具体的には、回転角選択部43は、回転角推定部51と、選択部52とを備えている。
回転角推定部51は、たとえば、次式(8)に基づいて、第1の回転角θ1と第2の回転角θ2との平均を演算することにより、回転角推定値θEを求める。
選択部52は、回転角推定部51によって得られた回転角推定値θEを用い、次式(9)に示す条件式にしたがって、第1の回転角θ1および第2の回転角θ2のうちの一方を、最終的な回転角θとして選択する。なお、この条件式は、第1の実施形態における条件式(前記式(5)参照)と同じである。
If 45°≦θE<135° then θ=θ2
If 135°≦θE<225° then θ=θ1
If 225°≦θE<315° then θ=θ2
If 315°≦θE<360° then θ=θ1 …(9)
図7は、回転角演算装置40によって実行される回転角演算処理の手順を示すフローチャートである。
また、回転角演算装置40の回転角選択部43は、第1の回転角θ1と第2の回転角θ2とに基づいて回転角推定値θEを演算する(ステップS14)。回転角選択部43は、たとえば、前記式(8)に基づいて、第1の回転角θ1と第2の回転角θ2の平均値を、回転角推定値θEとして求める。そして、回転角選択部43は、回転角推定値θEを用い、前記式(9)の条件式にしたがって、第1の回転角θ1および第2の回転角θ2のうちの一方を、最終的な回転角θとして選択する。(ステップS15)。
前記第1および第2の実施形態では、第1の回転角θ1と第2の回転角θ2との平均を演算することによって、回転角推定値θEを求めているが、第1の回転角θ1または第2の回転角θ2のいずれかを、回転角推定値θEとして用いるようにしてもよい。また、第1の回転角θ1と第2の回転角θ2のいずれかが最終的な回転角θとして最初に選択された後においては、現在選択されている第1または第2の回転角θ1,θ2を回転角推定値θEとして用いるようにしてもよい。さらに、最終的な回転角が最初に演算された後においては、前回演算された最終的な回転角θを、今回の回転角推定値θEとして用いるようにしてもよい。
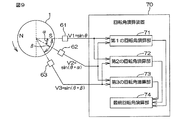
図9は、この発明の第3の実施形態に係る回転角検出装置の構成を示す模式図である。
ロータ1の周囲には、3つの磁気センサ61,62,63が、ロータ1の周方向に間隔をおいて配置されている。これら3つの磁気センサ61,62,63を、それぞれ第1の磁気センサ61、第2の磁気センサ62および第3の磁気センサ63という場合がある。第1の磁気センサ61と第2の磁気センサ62とは、ロータ1の回転中心軸を中心として、αの角度間隔をおいて配置されている。このαは、この例では、たとえば30°に設定されている。第1の磁気センサ61と第3の磁気センサ63とは、ロータ1の回転中心軸を中心として、αより大きなβの角度間隔をおいて配置されている。このβは、この例では、たとえば60°に設定されている。したがって、第2の磁気センサ62と第3の磁気センサ63との間の角度間隔は、(β−α)となる。この例では、(β−α)は、30°である。
図10は、回転角演算装置70のさらに詳細な構成を示す機能ブロック図である。
第1の回転角演算部71は、信号生成部81と、角度演算部82とを含んでいる。信号生成部81は、第1の出力信号V1(=sinθ)と第2の出力信号V2(=sin(θ+α))とから、第1の出力信号V1に対する位相差が90°となる信号V12(=sin(θ+90°)=cosθ)を生成する。具体的には、信号生成部81は、次式(11)に基づいて、信号V12を生成する。
角度演算部82は、信号生成部81によって生成された信号V12(=cosθ)と第1の出力信号V1(=sinθ)とを用い、次式(12)に基づいて、第1の回転角θ1を演算する。
θ’=θ+αとして、出力信号V2を正弦波信号sinθ’で表し、出力信号V3を、この正弦波信号sinθ’に対して位相差が(β−α)進んだ正弦波信号sin(θ’+(β−α))で表すと、前記第1の回転角演算部71と同様な方法により、正弦波信号sinθ’に対して位相差が90°となる信号V23(=sin(θ’+90°)=cosθ’)を求めることができる。
角度演算部102は、信号生成部101によって生成された信号V23(=cosθ’)と第2の出力信号V2(=sinθ’=sin(θ+α))とを用い、次式(16)に基づいて、回転角θ3’を演算する。
θ3=θ3’−α …(17)
なお、αは予めメモリに格納されている。
最終回転角演算部74は、たとえば、次式(18)に基づいて、最終的な回転角θを演算する。つまり、最終回転角演算部74は、第1、第2および第3の回転角θ1,θ2,θ3の平均値を、最終的な回転角θとして演算する。
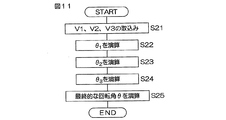
図11は、回転角演算装置70によって実行される回転角演算処理の手順を示すフローチャートである。
回転角演算処理は、所定の演算周期毎に繰り返し行なわれる。まず、回転角演算装置70は、各磁気センサ61,62,63の出力信号V1(=sinθ),V2(=sin(θ+α)),V3(=sin(θ+β))を取り込む(ステップS21)。そして、回転角演算装置70の第1の回転角演算部71は、ステップS21で取り込まれた出力信号V1,V2と、メモリに格納されているsinαおよびcosαの値と、前記式(11),(12)とを用いて、第1の回転角θ1を演算する(ステップS22)。
また、回転角演算装置70の第3の回転角演算部73は、ステップS21で取り込まれた出力信号V2,V3と、メモリに格納されているα、sin(β−α)およびcos(β−α)の値と、前記式(15),(16),(17)とを用いて、第3の回転角θ3を演算する(ステップS24)。
前記第3の実施形態では、3つの回転角θ1,θ2,θ3の平均値が、最終的な回転角θとして求められている。このため、磁気センサの出力信号に含まれるノイズの影響による検出誤差を低減できる。また、最終的な回転角θは、同時刻に発生した出力信号V1,V2,V3から演算された3つの回転角θ1,θ2,θ3に基づいて演算されているので、時間方向に回転角を平均化することによって最終的な回転角を演算する場合に比べ、回転角検出に時間遅れが発生しない。このためロータ1の回転速度が大きい場合でも、高い応答性を実現できる。つまり、前記実施形態によれば、高い応答性を維持しつつ、ノイズの影響による検出誤差を低減できる。
その他、特許請求の範囲に記載された事項の範囲で種々の設計変更を施すことが可能である。
Claims (2)
- 回転体の回転に応じて、互いに位相差を有する第1、第2および第3の正弦波信号をそれぞれ出力する第1、第2および第3のセンサを含み、これらのセンサの出力信号に基づいて前記回転体の回転角を検出する回転角検出装置であって、
前記第1の正弦波信号と前記第2の正弦波信号とに基づいて、前記回転体の回転角に相当する第1の回転角を演算する第1回転角演算手段と、
前記第1の正弦波信号と前記第3の正弦波信号とに基づいて、前記回転体の回転角に相当する第2の回転角を演算する第2回転角演算手段と、
前記第2の正弦波信号と前記第3の正弦波信号とに基づいて、前記回転体の回転角に相当する第3の回転角を演算する第3回転角演算手段と、
前記第1、第2および第3の回転角に基づいて、最終的な回転角を演算する最終回転角演算手段とを含み、
前記第1のセンサは、前記回転体の回転角θに対して、V1=sinθで表される第1の正弦波信号V1を出力するものであり、
前記第2のセンサは、前記回転体の回転角θに対して、前記第1および第2の正弦波信号の位相差αを用いてV2=sin(θ+α)で表される第2の正弦波信号V2を出力するものであり、
前記第3のセンサは、前記回転体の回転角θに対して、前記第1および第3の正弦波信号の位相差βを用いてV3=sin(θ+β)で表される第3の正弦波信号V3を出力するものであり、
前記第1回転角演算手段は、次式(i)により、第1の回転角θ1を求めるものであり、
前記第2回転角演算手段は、次式(ii)により、第2の回転角θ2を求めるものであり、
前記第3回転角演算手段は、次式(iii)により、第3の回転角θ3を求めるものである、回転角検出装置。
- 前記最終回転角演算手段は、前記第1、第2および第3の回転角の平均値、前記第1、第2および第3の回転角の中央値または前記第1、第2および第3の回転角のうちの中央値と、他の2つの回転角のうち、前記中央値との差が小さいものとの平均値を、最終的な回転角として演算するように構成されている、請求項1に記載の回転角検出装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010166122A JP5557021B2 (ja) | 2009-08-26 | 2010-07-23 | 回転角検出装置 |
| EP10811781.3A EP2472233A4 (en) | 2009-08-26 | 2010-08-20 | DEVICE FOR DETECTING A ROTATION ANGLE |
| US13/389,977 US20120143563A1 (en) | 2009-08-26 | 2010-08-20 | Rotation angle detection device |
| PCT/JP2010/064105 WO2011024731A1 (ja) | 2009-08-26 | 2010-08-20 | 回転角検出装置 |
| CN201080037552XA CN102575946A (zh) | 2009-08-26 | 2010-08-20 | 旋转角检测装置 |
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009195191 | 2009-08-26 | ||
| JP2009195191 | 2009-08-26 | ||
| JP2009195190 | 2009-08-26 | ||
| JP2009195190 | 2009-08-26 | ||
| JP2010166122A JP5557021B2 (ja) | 2009-08-26 | 2010-07-23 | 回転角検出装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011069815A JP2011069815A (ja) | 2011-04-07 |
| JP2011069815A5 JP2011069815A5 (ja) | 2013-09-12 |
| JP5557021B2 true JP5557021B2 (ja) | 2014-07-23 |
Family
ID=43627837
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010166122A Expired - Fee Related JP5557021B2 (ja) | 2009-08-26 | 2010-07-23 | 回転角検出装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20120143563A1 (ja) |
| EP (1) | EP2472233A4 (ja) |
| JP (1) | JP5557021B2 (ja) |
| CN (1) | CN102575946A (ja) |
| WO (1) | WO2011024731A1 (ja) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5660381B2 (ja) * | 2011-03-09 | 2015-01-28 | 株式会社ジェイテクト | 回転角検出装置 |
| GB201110039D0 (en) * | 2011-06-15 | 2011-07-27 | Trw Ltd | Measurement of motor rotor position or speed |
| JP6086205B2 (ja) * | 2012-12-12 | 2017-03-01 | 株式会社ジェイテクト | 位相差検出装置およびそれを備えた回転角検出装置 |
| JP6024971B2 (ja) | 2012-12-12 | 2016-11-16 | 株式会社ジェイテクト | 回転角検出装置 |
| JP6024969B2 (ja) | 2012-12-12 | 2016-11-16 | 株式会社ジェイテクト | 回転角検出装置およびそれを備えた電動パワーステアリング装置 |
| JP6024970B2 (ja) * | 2012-12-12 | 2016-11-16 | 株式会社ジェイテクト | 回転角検出装置およびそれを備えた電動パワーステアリング装置 |
| JP6377335B2 (ja) * | 2013-10-28 | 2018-08-22 | 日本電産サンキョー株式会社 | 検出装置におけるデータ検出方法および検出装置 |
| WO2016002732A1 (ja) * | 2014-06-30 | 2016-01-07 | パナソニックヘルスケアホールディングス株式会社 | 回転角度検出回路、回転角度検出方法、試料分析装置および試料分析装置のためのコンピュータプログラム |
| DE102015212812A1 (de) * | 2015-07-08 | 2017-01-12 | Conti Temic Microelectronic Gmbh | Betrieb einer rotierenden elektrischen Maschine |
| JP2017138143A (ja) * | 2016-02-02 | 2017-08-10 | Tdk株式会社 | 変位検出装置および角速度検出装置 |
| CN107461288B (zh) * | 2016-06-03 | 2018-12-25 | 纳博特斯克有限公司 | 检测装置以及起动装置 |
| JP6758998B2 (ja) * | 2016-08-24 | 2020-09-23 | Ntn株式会社 | 電動モータ装置 |
| JP7035608B2 (ja) * | 2018-02-22 | 2022-03-15 | 株式会社デンソーウェーブ | ロボットのアーム回転軸速度検出装置 |
| CN111294457B (zh) * | 2018-12-10 | 2021-06-29 | 北京小米移动软件有限公司 | 滑盖式终端、滑盖状态检测方法、装置及存储介质 |
| JP7172797B2 (ja) * | 2019-03-28 | 2022-11-16 | 株式会社デンソー | 検出ユニット |
| JP7287375B2 (ja) * | 2020-10-23 | 2023-06-06 | Tdk株式会社 | 磁気センサアセンブリとこれを備えたカメラモジュール |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0555022A (ja) | 1991-08-26 | 1993-03-05 | Sankyo Seiki Mfg Co Ltd | 希土類ボンド磁石 |
| DE19543562A1 (de) | 1994-11-22 | 1996-05-23 | Bosch Gmbh Robert | Anordnung zur berührungslosen Drehwinkelerfassung eines drehbaren Elements |
| DE19941101B4 (de) * | 1999-08-30 | 2008-01-17 | Delphi Technologies, Inc., Troy | Sensoranordnung |
| JP2001114116A (ja) * | 1999-10-19 | 2001-04-24 | Alps Electric Co Ltd | 回転角検出装置 |
| JP2001324321A (ja) | 2000-03-07 | 2001-11-22 | Koyo Seiko Co Ltd | 回転角度検出装置、トルク検出装置及び舵取装置 |
| JP2002213944A (ja) | 2001-01-18 | 2002-07-31 | Niles Parts Co Ltd | 回転角測定装置 |
| JP2003240598A (ja) * | 2002-02-13 | 2003-08-27 | Asahi Kasei Corp | デジタル角度測定システム |
| JP2004156961A (ja) | 2002-11-05 | 2004-06-03 | Koyo Seiko Co Ltd | 回転角検出装置及びトルク検出装置 |
| JP2004264167A (ja) * | 2003-03-03 | 2004-09-24 | Midori Sokki:Kk | 回転角度センサ |
| JP4763296B2 (ja) * | 2005-01-18 | 2011-08-31 | 古河電気工業株式会社 | 検知装置 |
| EP1830155A1 (en) * | 2005-02-10 | 2007-09-05 | Matsushita Electric Industrial Co., Ltd. | Rotation angle detection device and rotation angle correction method |
| JP4059300B2 (ja) * | 2005-06-30 | 2008-03-12 | 株式会社村田製作所 | 検知装置及び回転角度センサ |
| JP4797721B2 (ja) * | 2005-10-20 | 2011-10-19 | 株式会社デンソー | 回転角度検出装置 |
| JP2007155618A (ja) * | 2005-12-07 | 2007-06-21 | Denso Corp | 回転角度検出装置 |
| JP2008045881A (ja) * | 2006-08-10 | 2008-02-28 | Nsk Ltd | 回転角度位置検出装置 |
| JP2008128961A (ja) * | 2006-11-24 | 2008-06-05 | Alps Electric Co Ltd | 絶対角検出装置 |
| KR100847491B1 (ko) * | 2007-03-20 | 2008-07-21 | 대성전기공업 주식회사 | 조향각센서 오류검출 장치 및 방법 |
| JP2008241411A (ja) | 2007-03-27 | 2008-10-09 | Jtekt Corp | 舵角検出装置 |
| DE112007003469B4 (de) * | 2007-04-24 | 2014-12-11 | Harmonic Drive Systems Inc. | Magnetischer Geber und Verfahren des Erfassens einer absoluten Rotationsposition |
| JP2009195191A (ja) | 2008-02-22 | 2009-09-03 | Hayashi Bussan Hatsumei Kenkyusho:Kk | コケもしくは匍匐植物の育成具 |
| JP4990815B2 (ja) | 2008-02-22 | 2012-08-01 | パナソニック株式会社 | 害虫防除装置 |
| JP2010166122A (ja) | 2009-01-13 | 2010-07-29 | Olympus Corp | 撮像装置及び画像処理方法 |
-
2010
- 2010-07-23 JP JP2010166122A patent/JP5557021B2/ja not_active Expired - Fee Related
- 2010-08-20 WO PCT/JP2010/064105 patent/WO2011024731A1/ja active Application Filing
- 2010-08-20 CN CN201080037552XA patent/CN102575946A/zh active Pending
- 2010-08-20 EP EP10811781.3A patent/EP2472233A4/en not_active Withdrawn
- 2010-08-20 US US13/389,977 patent/US20120143563A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| EP2472233A4 (en) | 2014-06-18 |
| US20120143563A1 (en) | 2012-06-07 |
| CN102575946A (zh) | 2012-07-11 |
| WO2011024731A1 (ja) | 2011-03-03 |
| EP2472233A1 (en) | 2012-07-04 |
| JP2011069815A (ja) | 2011-04-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5557021B2 (ja) | 回転角検出装置 | |
| JP5716954B2 (ja) | 回転角検出装置 | |
| JP2012127801A (ja) | 回転角検出装置 | |
| US8836326B2 (en) | Rotation angle detection device | |
| WO2011024730A1 (ja) | 回転角検出装置 | |
| CN104457552B (zh) | 旋转角检测装置 | |
| TW201842299A (zh) | 旋轉角度檢測裝置及旋轉角度檢測方法 | |
| JP2011069815A5 (ja) | ||
| US20120182008A1 (en) | Rotation angle detecting device | |
| JP2012189376A (ja) | 回転角検出装置およびトルク検出装置 | |
| JP2019002942A (ja) | 回転検知装置及び回転検知方法 | |
| JP4317173B2 (ja) | 移動物体の方向検出方法及びそのシステム | |
| JP2008116291A (ja) | 回転検出装置および回転検出装置付き軸受 | |
| JP2011047735A (ja) | 回転角検出装置 | |
| JP2014013209A (ja) | 角度検出装置 | |
| JP5082481B2 (ja) | 回転角度位置算出装置及びモータ | |
| JP5454918B2 (ja) | 回転角検出装置 | |
| JP2012073053A (ja) | 回転角度検出装置 | |
| JP2016080408A (ja) | 回転角度検出回路 | |
| CN102435164B (zh) | 一种旋转体绝对转角的测量方法和装置 | |
| JP7224309B2 (ja) | 角度検出装置 | |
| JP6112832B2 (ja) | 角度補正装置及び回転角センサ | |
| JP6377335B2 (ja) | 検出装置におけるデータ検出方法および検出装置 | |
| JP5193930B2 (ja) | 微小角度検出センサ | |
| JP7165691B2 (ja) | 角度検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130620 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130729 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130801 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131003 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131212 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140127 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140508 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140521 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5557021 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |