JP6024971B2 - 回転角検出装置 - Google Patents
回転角検出装置 Download PDFInfo
- Publication number
- JP6024971B2 JP6024971B2 JP2012271640A JP2012271640A JP6024971B2 JP 6024971 B2 JP6024971 B2 JP 6024971B2 JP 2012271640 A JP2012271640 A JP 2012271640A JP 2012271640 A JP2012271640 A JP 2012271640A JP 6024971 B2 JP6024971 B2 JP 6024971B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic
- rotation angle
- output signal
- magnetic sensor
- magnetic pole
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/30—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring angles or tapers; for testing the alignment of axes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
Description
ここでは、第1磁気センサ221からは、S1=A1・sinθの出力信号が出力され、第2磁気センサ222からは、S2=A2・cosθの出力信号が出力されるものとする。A1,A2は、振幅である。両出力信号S1,S2の振幅A1,A2が互いに等しいとみなすと、ロータ201の電気角θは、両出力信号S1,S2を用いて、次式に基づいて求めることができる。
=tan−1(S1/S2)
このようにして、求められた電気角θを使って、ブラシレスモータを制御する。
この構成では、第1磁気センサおよび第2磁気センサの組み合わせからなる2つの磁気センサがそれぞれ異なる磁極を検出しているときには、第2磁気センサおよび第3磁気センサの組み合わせからなる2つの磁気センサが共に同じ一つの磁極を検出する。逆に、第2磁気センサおよび第3磁気センサの組み合わせからなる2つの磁気センサがそれぞれ異なる磁極を検出しているときには、第1磁気センサおよび第2磁気センサの組み合わせからなる2つの磁気センサが共に同じ一つの磁極を検出する。したがって、3つの磁気センサのうちの2つの磁気センサが共に同じ1つの磁極を3サンプリング周期連続して検出しているという条件を満たす確率が高くなる。これにより、高い精度で回転角を演算できる第1演算手段によって回転角を演算できる確率が高くなる。
請求項3記載の発明は、前記磁極の磁極幅に関する情報が、前記磁極の磁極幅誤差に基づく回転角誤差を補正するための磁極幅誤差補正値であり、前記第1磁気センサの出力信号の振幅をA1、前記第1磁気センサが検出している磁極に対応する磁極幅誤差補正値をE1、前記回転体の回転角をθとすると、前記第1磁気センサの出力信号S1は、S1=A1sin(E1θ)で表され、前記第2磁気センサの出力信号の振幅をA2、前記第2磁気センサが検出している磁極の磁極幅誤差補正値E2とすると、前記第2磁気センサの出力信号S2は、S2=A2sin(E2θ+120)で表され、前記第3磁気センサの出力信号の振幅をA3、前記第3磁気センサが検出している磁極の磁極幅誤差補正値E3とすると、前記第3磁気センサの出力信号S3は、S3=A3sin(E3θ+240)で表される、請求項2に記載の回転角演算装置である。
図1は、本発明の一実施形態に係る回転角検出装置が適用された電動パワーステアリング装置の概略構成を示す模式図である。
電動パワーステアリング装置1は、車両を操向するための操舵部材としてのステアリングホイール2と、このステアリングホイール2の回転に連動して転舵輪3を転舵する転舵機構4と、運転者の操舵を補助するための操舵補助機構5とを備えている。ステアリングホイール2と転舵機構4とは、ステアリングシャフト6および中間軸7を介して機械的に連結されている。
操舵補助機構5は、操舵補助力を発生するための電動モータ18と、電動モータ18の出力トルクを転舵機構4に伝達するための減速機構19とを含む。電動モータ18は、この実施形態では、三相ブラシレスモータからなる。減速機構19は、ウォーム軸20と、このウォーム軸20と噛み合うウォームホイール21とを含むウォームギヤ機構からなる。減速機構19は、伝達機構ハウジングとしてのギヤハウジング22内に収容されている。
電動モータ18によってウォーム軸20が回転駆動されると、ウォームホイール21が回転駆動され、ステアリングシャフト6が回転する。そして、ステアリングシャフト6の回転は、中間軸7を介してピニオン軸13に伝達される。ピニオン軸13の回転は、ラック軸14の軸方向移動に変換される。これにより、転舵輪3が転舵される。すなわち、電動モータ18によってウォーム軸20を回転駆動することによって、転舵輪3が転舵されるようになっている。
図2は、モータ制御用ECU12の電気的構成を示す概略図である。
電流指令値設定部41は、dq座標系の座標軸に流すべき電流値を電流指令値として設定する。具体的には、電流指令値設定部41は、d軸電流指令値Id *およびq軸電流指令値Iq *(以下、これらを総称するときには「二相電流指令値Idq *」という。)を設定する。さらに具体的には、電流指令値設定部41は、q軸電流指令値Iq *を有意値とする一方で、d軸電流指令値Id *を零とする。より具体的には、電流指令値設定部41は、トルクセンサ11によって検出される操舵トルク(検出操舵トルク)Thに基づいて、q軸電流指令値Iq *を設定する。
電流検出部32は、電動モータ18のU相電流IU、V相電流IVおよびW相電流IW(以下、これらを総称するときは、「三相検出電流IUVW」という。)を検出する。電流検出部32によって検出された三相検出電流IUVWは、UVW/dq変換部46に与えられる。
dq/UVW変換部44は、二相電圧指令値Vdq *を三相電圧指令値VUVW *に座標変換する。この座標変換には、回転角演算部47によって演算されたロータ角θSが用いられる。三相電圧指令値VUVW *は、U相電圧指令値VU *、V相電圧指令値VV *およびW相電圧指令値VW *からなる。この三相電圧指令値VUVW *は、PWM制御部45に与えられる。
駆動回路31は、U相、V相およびW相に対応した三相インバータ回路からなる。このインバータ回路を構成するパワー素子がPWM制御部45から与えられるPWM制御信号によって制御されることにより、三相電圧指令値VUVW *に相当する電圧が電動モータ18の各相のステータ巻線101,102、103に印加されることになる。
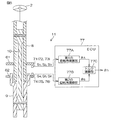
図5は、トルクセンサ11の構成を図解的に示す模式図である。
出力軸9には、環状の第2の磁石(多極磁石)62が一体回転可能に連結されている。第2の磁石62の上側には、第2の磁石62の回転に応じて互いに位相差を有する正弦波状の信号をそれぞれ出力する3つの磁気センサ74,75,76が配置されている。
トルク演算用ECU77は、マイクロコンピュータを含んでいる。マイクロコンピュータは、CPUおよびメモリ(ROM,RAM,不揮発性メモリ等)を備えており、所定のプログラムを実行することによって、複数の機能処理部として機能する。この複数の機能処理部には、第1の回転角演算部77Aと、第2の回転角演算部77Bと、トルク演算部77Cとを含んでいる。
トルク演算部77Cは、第1の回転角演算部77Aによって検出された入力軸8の回転角θAと第2の回転角演算部77Bによって検出された出力軸9の回転角θBとに基づいて、入力軸8に加えられた操舵トルクThを演算する。具体的には、操舵トルクThは、トーションバー10のバネ定数をKとし、各磁石61,62に設けられた磁極対数をNとすると、次式(1)に基づいて演算される。
第1の磁石61、磁気センサ71,72,73および第1の回転角演算部77Aによって、入力軸8の回転角θAを検出するための第1の回転角検出装置が構成されている。また、第2の磁石62、磁気センサ74,75,76および第2の回転角演算部77Bによって、出力軸9の回転角θBを検出するための第2の回転角検出装置が構成されている。第1の回転角検出装置(第1の回転角演算部77A)の動作と第2の回転角検出装置(第2の回転角演算部77B)動作は同様であるので、以下、第1の回転角検出装置(第1の回転角演算部77A)の動作についてのみ説明する。
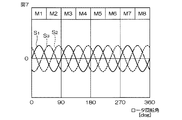
第1の磁石61は、周方向に等角度間隔で配された4組の磁極対(M1,M2),(M3,M4),(M5,M6),(M7,M8)を有している。つまり、第1の磁石61は、等角度間隔で配置された8個の磁極M1〜M8を有している。各磁極M1〜M8は、入力軸8の中心軸を中心として、ほぼ45°(電気角ではほぼ180°)の角度間隔(角度幅)で配置されている。各磁極M1〜M8の磁力の大きさは、ほぼ一定である。
以下においては、説明の便宜上、入力軸8の回転角をθAではなく、θで表すことにする。各出力信号S1,S2,S3が正弦波信号であるとみなし、入力軸8の回転角をθ(電気角)とすると、第1磁気センサ71の出力信号S1は、S1=A1・sinθと表され、第2磁気センサ72の出力信号S2は、S2=A2・sin(θ+120)と表され、第3磁気センサ73の出力信号S3は、S3=A3・sin(θ+240)と表される。A1,A2,A3は、それぞれ振幅を表している。第1出力信号S1と第2出力信号S2との位相差は120度である。第2出力信号S2と第3出力信号S3との位相差も120度である。したがって、第1出力信号S1と第3出力信号S3との位相差は240度である。
[1]第1演算モード
第1演算モードは、第1および第2磁気センサ71,72が、3サンプリング周期(3演算周期)連続して共に同じ1つの磁極を検出している場合に適用される演算モードである。第1演算モードでは、第1および第2磁気センサ71,72における3サンプリング分の出力信号に基づいて回転角θが演算される。
S1[n]=A1[n]sin(E1[n]θ[n]) …(2a)
S1[n-1]=A1[n-1]sin(E1[n-1]θ[n-1]) …(2b)
S1[n-2]=A1[n-2]sin(E1[n-2]θ[n-2]) …(2c)
S2[n]=A2[n]sin(E2[n]θ[n]+C) …(2d)
S2[n-1]=A2[n-1]sin(E2[n-1]θ[n-1]+C) …(2e)
S2[n-2]=A2[n-2]sin(E2[n-2]θ[n-2]+C) …(2f)
前記式(2a)〜(2f)において、E1[x]は、x番目の演算周期において第1磁気センサ71が検出している磁極に対応する角度幅誤差補正値である。E2[x]は、x番目の演算周期において第2磁気センサ72が検出している磁極に対応する角度幅誤差補正値である。
θerr=w−180 …(3)
その磁極に対する角度幅誤差補正値Eは、次式(4)で定義される。
E=180/w
=180/(θerr+180) …(4)
各磁極の角度幅誤差補正値Eは、各磁極の磁極幅に関する情報である。なお、各磁極の磁極幅に関する情報は、各磁極の角度幅wであってもよいし、各磁極の角度幅誤差θerrであってもよい。
この実施形態では、サンプリング間隔(サンプリング周期)を短く設定することにより、3サンプリング間の温度変化による振幅の変化がないとみなす。つまり、3サンプリング間の第1磁気センサ71の出力信号の振幅A1[n],A1[n-1],A1[n-2]が互いに等しいとみなして、これらをA1とする。同様に、3サンプリング間の第2磁気センサ72の出力信号の振幅A2[n],A2[n-1],A2[n-2]が互いに等しいとみなし、これらをA2とする。
S1[n-1]=A1sin(Eθ[n-1]) …(5b)
S1[n-2]=A1sin(Eθ[n-2]) …(5c)
S2[n]=A2sin(Eθ[n]+C) …(5d)
S2[n-1]=A2sin(Eθ[n-1]+C) …(5e)
S2[n-2]=A2sin(Eθ[n-2]+C) …(5f)
これら6つの式に含まれる未知数(A1,A2,E,θ[n],θ[n-1],θ[n-2])の数は6となる。つまり、未知数の数が方程式の数以下となるため、6つの式からなる連立方程式を解くことができる。したがって、前記6つの式(5a)〜(5f) からなる連立方程式を解くことにより、入力軸8の回転角θ[n]を演算することができる。
S1[n]=A1sin(Eθ[n]) …(6a)
S1[n-1]=A1sin(Eθ[n-1]) …(6b)
S1[n-2]=A1sin(Eθ[n-2]) …(6c)
S2[n]=A2sin(Eθ[n]+120) …(6d)
S2[n-1]=A2sin(Eθ[n-1]+120) …(6e)
S2[n-2]=A2sin(Eθ[n-2]+120) …(6f)
Eθ[n]を1つの未知数と考えると、前記6つの式(6a)〜(6f)のうちの4つの式(6a),(6b),(6d),(6e) からなる連立方程式を解くことにより、Eθ[n]は、次式(7) (以下、「Eθ基本演算式(7)」という。)で表わされる。

θ[n]=Eθ[n]/E …(9)
ただし、E演算式(8) に含まれている分数のいずれかの分母が零になる場合には、E演算式(8)に基づいて角度幅誤差補正値Eを演算することはできない。そこで、この実施形態では、E演算式(8) に含まれている分数のいずれかの分母が零になる場合には、前回に演算された角度幅誤差補正値Eを今回の角度幅誤差補正値Eとして用いるようにしている。
S2[n]=A2sin(Eθ[n]+120) …(15c)
S2[n-1]=A2sin120=√3/2・A2 …(15d)
前記式(15d)から、次式(16)が得られる。
前記式(16)を前記式(15c)に代入すると、次式(17)が得られる。
sin(Eθ[n]+120)=(√3/2)・(S2[n]/S2[n-1]) …(17)
したがって、Eθ[n]は、次式(18)により演算することができる。
一方、Eθ[n-1]=180である場合には、前記式 (6c),(6d)は、それぞれ次式(19c),(19d)で表される。
S2[n-1]=A2sin300=−√3/2・ A2 …(19d)
前記式(19d)から、次式(20)が得られる。
A2=(−2/√3)・S2[n-1] …(20)
前記式(20)を前記式(19c)に代入すると、次式(21)が得られる。
したがって、Eθ[n]は、次式(22)により演算することができる。
表1の上から5番目および6番目の演算式は、S2[n]=0となる場合に適用される演算式である。S2[n]=A2sin(Eθ[n]+120)であるので、sin(Eθ[n]+120)=0のときに、S2[n]=0となる。つまり、Eθ[n]が−120度または60度のときに、S2[n]=0となる。S1[n]=A1sinEθ[n]であるので、Eθ[n]が−120度のときにはS1[n]<0となり、Eθ[n]が60度のときにはS1[n]>0となる。したがって、S2[n]=0でかつS1[n]>0のときにはEθ[n]=60となり、S2[n]=0でかつS1[n]<0であればEθ[n]=−120となる。
S1[n]=A1sinEθ[n] …(23a)
S1[n-1]=A1sin60=√3/2・ A1 …(23b)
前記式(23b)から、次式(24)が得られる。
前記式(24)を前記式(23a)に代入すると、次式(25)が得られる。
sinEθ[n]=(√3/2)・(S1[n]/S1[n-1]) …(25)
したがって、Eθ[n]は、次式(26)により演算することができる。
一方、Eθ[n-1]=−120である場合には、前記式 (6a),(6b)は、それぞれ次式 (27a),(27b)で表される。
S1[n-1]=A1sin(−120)=−√3/2・ A2 …(27b)
前記式(27b)から、次式(28)が得られる。
A1=(−2/√3)・S1[n-1] …(28)
前記式(28)を前記式(27a)に代入すると、次式(29)が得られる。
したがって、Eθ[n]は、次式(30)により演算することができる。
表1の上から9番目および10番目の演算式は、S1[n]=0となる場合に適用される演算式である。S1[n]=A1sinEθ[n]であるので、sinEθ[n]=0のときに、S1[n]=0となる。つまり、Eθ[n]が0度または180度のときに、S1[n]=0となる。S2[n]=A2sin(Eθ[n]+120]であるので、Eθ[n]が0度のときにはS2[n]>0となり、Eθ[n]が180度のときにはS2[n]<0となる。したがって、S1[n]=0でかつS2[n]>0であればEθ[n]=0となり、S1[n]=0でかつS2[n]<0であればEθ[n]=180となる。
Eθ[n]が演算されると、前記式(6a)に基づいて振幅A1を演算することができるとともに、前記式(6d)に基づいて振幅A2を演算することができる。つまり、第1演算モードによって、E,θ[n],A1,A2を演算することができる。
[2]第2演算モード
第2演算モードは、第2および第3磁気センサ72,73が、3サンプリング周期(3演算周期)連続して共に同じ1つの磁極を検出している場合に適用される演算モードである。第2演算モードでは、第2および第3磁気センサ72,73における3サンプリング分の出力信号に基づいて回転角θが演算される。
S2[n]=A2sin(Eθ[n]+120) …(31a)
S2[n-1]=A2sin(Eθ[n-1]+120) …(31b)
S2[n-2]=A2sin(Eθ[n-2]+120) …(31c)
S3[n]=A3sin(Eθ[n]+120) …(31d)
S3[n-1]=A3sin(Eθ[n-1]+120) …(31e)
S3[n-2]=A3sin(Eθ[n-2]+120) …(31f)
[3]第3演算モード
第3演算モードは、第1演算モードおよび第2演算モードのいずれもが適用できない場合であって、第1磁気センサ71が検出している磁極に対応する角度幅誤差補正値E1および第1出力信号S1の振幅A1が第1演算モードによって既に演算されてメモリに記憶されている場合に適用される演算モードである。第3演算モードでは、主として第1磁気センサ71の出力信号S1に基づいて回転角θが演算される。
角度幅誤差補正値Eと今演算周期の番号nを用いると、今演算周期においてサンプリングされた第1磁気センサ71の出力信号S1は、次式(34)で表される。
E1は、第1磁気センサ71が検出している磁極に対応する角度幅誤差補正値である。
前記式(34)から回転角θ[n]は、次式(35)で表される。
θ[n]=(1/E1)sin−1(S1[n]/A1) …(35)
メモリに記憶されており、第1磁気センサ71が検出している磁極に対応するE1およびA1を、前記式(35)に代入することにより、θ[n]が演算される。ただし、式(35)によって回転角θ[n]を演算する場合には、2つの回転角θ[n]が演算されるので、いずれの回転角が実際の回転角であるかを判定する必要がある。この判定方法について、図9を参照して説明する。図9には、第1出力信号S1、第2出力信号S2および第3出力信号S3の1周期分の波形が示されている。図9の横軸の回転角[deg]は、電気角を表している。
[4]第4演算モード
第4演算モードは、第1演算モードおよび第2演算モードのいずれもが適用できない場合であって、第2磁気センサ72が検出している磁極に対応する角度幅誤差補正値E2および第2出力信号S2の振幅A2が第1演算モードまたは第3演算モードによって既に演算されてメモリに記憶されている場合に適用される演算モードである。第4演算モードでは、主として第2磁気センサ72の出力信号S2に基づいて回転角θが演算される。
角度幅誤差補正値Eと今演算周期の番号nを用いると、今演算周期においてサンプリングされた第2磁気センサ72の出力信号S2は、次式 (36)で表される。
E2は、第2磁気センサ72が検出している磁極に対応する角度幅誤差補正値である。
前記式(36)から回転角θ[n]は、次式(37)で表される。
θ[n]=(1/E2){sin−1(S2[n]/A2)−120} …(37)
メモリに記憶されており、第2磁気センサ72が検出している磁極に対応するE2およびA2を、前記式(37)に代入することにより、θ[n]が演算される。
たとえば、第1出力信号S1[n]に基づいて、前記判定が行われる場合について説明する。メモリに記憶されている第1出力信号S1の振幅A1の1/2または第2出力信号S2の振幅A2の1/2を閾値a(a>0)とする。
[5]第5演算モード
第5演算モードは、第1演算モードおよび第2演算モードのいずれもが適用できない場合であって、第3磁気センサ73が検出している磁極に対応する角度幅誤差補正値E3および第3出力信号S3の振幅A3が第2演算モードによって既に演算されてメモリに記憶されている場合に適用される演算モードである。第5演算モードでは、主として第3磁気センサ72の出力信号S3に基づいて回転角θが演算される。
角度幅誤差補正値Eと今演算周期の番号nを用いると、今演算周期においてサンプリングされた第3磁気センサ73の出力信号S3は、次式 (38)で表される。
E3は、第3磁気センサ72が検出している磁極に対応する角度幅誤差補正値である。
前記式(38)から回転角θ[n]は、次式(39)で表される。
θ[n]=(1/E3){sin−1(S3[n]/A3)−120} …(39)
メモリに記憶されており、第3磁気センサ73が検出している磁極に対応するE3およびA3を、前記式(39)に代入することにより、θ[n]が演算される。
たとえば、第2出力信号S2[n]に基づいて、前記判定が行われる場合について説明する。メモリに記憶されている第2出力信号S2の振幅A2の1/2または第3出力信号S3の振幅A3の1/2を閾値a(a>0)とする。
トルク演算用ECU77の電源がオンすると、第1の回転角演算部77Aは、強制回転に基づく回転角演算処理を行う(ステップS1)。この処理は、電動モータ18を一時的に強制回転させることにより、入力軸8(出力軸9)を回転させ、入力軸8の回転角θを演算する処理である。この処理の詳細については後述する。
強制回転に基づく回転角演算処理開始時において第1磁気センサ71が検出している磁極を基準磁極として、各磁極に相対的な番号を割り当てた場合の各磁極の番号を相対的極番号と定義する。第1磁気センサ71が検出している磁極の相対的極番号(以下、「第1相対的極番号」という)を変数r1で表し、第2磁気センサ72が検出している磁極の相対的極番号(以下、「第2相対的極番号」という)を変数r2で表し、第3磁気センサ73が検出している磁極の相対的極番号(以下、「第3相対的極番号」という)を変数r3で表すことにする。なお、各相対的極番号r1,r2,r3は、1〜8の整数をとり、1より1少ない相対的極番号は8となり、8より1大きい相対的極番号は1となるものとする。
図11Aに戻り、強制回転に基づく回転角演算処理では、短時間ではあるがステアリングホイール2が自動的に回転する。このため、運転者は何らかの故障が発生したと誤解するおそれがある。そこで、第1の回転角演算部77Aは、運転者への警告を行う(ステップS11)。具体的には、第1の回転角演算部77Aは、車内に設けられた表示装置(図示略)、音声出力装置(図示略)等を制御するための映像音声制御装置(図示略)に、警告出力指令を送信する。映像音声制御装置は、この警告出力指令を受信すると、「ステアリングホイールが強制的に回転しますが故障ではありません」等のメッセージを表示装置に表示したり、音声出力装置によって音声出力したりする。
図13は、相対的極番号の設定処理の詳細な手順を示すフローチャートである。
ステップS56では、第1の回転角演算部77Aは、「S1≧0かつS2>0」または「S1≦0かつS2<0」の条件を満たしているか否かを判別する。この条件を満たしている場合には(ステップS56:YES)、第1の回転角演算部77Aは、第2磁気センサ72が検出している磁極の極番号は、第1磁気センサ71が検出している磁極の極番号と同じであると判別し、第2相対的極番号r2に第1相対的極番号r1と同じ番号(r2=r1)を設定する(ステップS57)。そして、ステップS59に進む。
ステップS16では、第1の回転角演算部77Aは、メモリに記憶されているセンサ値S1,S2,S3に基づいて、センサ値S1,S2,S3毎に、センサ値の符号が反転するゼロクロスを検出したか否かを判別する。ゼロクロスが検出されなかったときには(ステップS16:NO)、第1の回転角演算部77Aは、図11BのステップS18に移行する。
ゼロクロスが検出された出力信号が第2出力信号S2である場合には、「第2出力信号S2の前回値が0より大きくかつその今回値が0以下であり、第1出力信号S1が0より大きい」という条件、または「第2出力信号S2の前回値が0未満でかつその今回値が0以上であり、第1出力信号S1が0より小さい」という条件を満たしている場合には、回転方向は正方向(図6に矢印で示す方向)であると判定される。一方、「第2出力信号S2の前回値が0以上でかつその今回値が0未満であり、第1出力信号S1が0より小さい」という条件、または「第2出力信号S2の前回値が0以下でかつその今回値が0より大きく、第1出力信号S1が0より大きい」という条件を満たしている場合には、回転方向は逆方向であると判定される。
相対的極番号の更新処理が終了すると、第1の回転角演算部77Aは、図11BのステップS18に移行する。ステップS18では、第1の回転角演算部77Aは、第1および第2磁気センサ71,72が共に同じ1つの磁極を3演算周期連続して検出しているという条件を満たしている否かを判別する。ステップS18の条件を満たしていない場合には(ステップS18:NO)、第1の回転角演算部77Aは、第2および第3磁気センサ72,73が共に同じ1つの磁極を3演算周期連続して検出しているという条件を満たしている否かを判別する(ステップS20)。ステップS20の条件を満たしていない場合には(ステップS20:NO)、第1の回転角演算部77Aは、図11AのステップS13に戻る。
第1の回転角演算部77Aは、各磁気センサ71,72,73のセンサ値S1[n], S2[n] ,S3[n]を取得する(ステップS61)。そして、第1の回転角演算部77Aは、メモリに記憶されているセンサ値S1,S2,S3に基づいて、センサ値S1,S2,S3毎に、センサ値の符号が反転するゼロクロスを検出したか否かを判別する(ステップS62)。ゼロクロスが検出されなかったときには(ステップS62:NO)、第1の回転角演算部77Aは、ステップS64に移行する。
前記ステップS72において、第1磁気センサ71が検出している磁極に対応する磁極幅補正値Eがメモリに記憶されていないと判別された場合には(ステップS72:NO)、第1の回転角演算部77Aは、ステップS74に進む。ステップS74では、第1の回転角演算部77Aは、第2磁気センサ72が検出している磁極に対応する磁極幅補正値Eがメモリに記憶されているか否かを判別する。この判別は、メモリのエリアe2内の現在設定されている第2相対的極番号r2に対応する記憶場所に、磁極幅補正値Eが記憶されているか否かに基づいて行われる。
前記ステップS74において、第2磁気センサ721が検出している磁極に対応する磁極幅補正値Eがメモリに記憶されていないと判別された場合には(ステップS74:NO)、第1の回転角演算部77Aは、第5演算モードによって回転角θ[n]を演算する(ステップS76)。そして、第1の回転角演算部77Aは、今回演算周期での処理を終了する。
その他、特許請求の範囲に記載された事項の範囲で種々の設計変更を施すことが可能である。
Claims (3)
- 回転体の回転に応じて回転し、複数の磁極を有する多極磁石と、
前記多極磁石の回転に応じて、互いに所定の位相差を有する正弦波信号をそれぞれ出力する3つの磁気センサと、
前記各磁気センサの出力信号を所定時間毎にサンプリングするサンプリング手段と、
前記3つの磁気センサのうちの2つの磁気センサが共に同じ1つの磁極を3サンプリング周期連続して検出しているという条件を満たしているときには、それらの2つの磁気センサの3サンプリング分の出力信号に基づいて、前記回転体の回転角を演算するとともに、常にまたは前記3サンプリング分の出力信号が一定の要件を満たしているときには、それらの2つの磁気センサが検出している磁極の磁極幅に関する情報およびそれらの2つの磁気センサの出力信号の振幅に関する情報を演算して当該磁極に関連付けて記憶する第1演算手段と、
前記条件を満たしていないときには、前記3つの磁気センサのうち、磁極幅に関する情報が関連付けて記憶されている磁極を検出している1つの磁気センサを含む2つの磁気センサの1サンプリング分の出力信号と、前記第1演算手段によって記憶されている前記情報とを用いて、前記回転体の回転角を演算する第2演算手段と、を含む回転角演算装置。 - 前記3つの磁気センサを第1磁気センサ、第2磁気センサおよび第3磁気センサとすると、前記第1磁気センサの出力信号と前記第2磁気センサの出力信号との位相差が120度であり、前記第1磁気センサの出力信号と前記第3磁気センサの出力信号との位相差が240度である、請求項1に記載の回転角演算装置。
- 前記磁極の磁極幅に関する情報が、前記磁極の磁極幅誤差に基づく回転角誤差を補正するための磁極幅誤差補正値であり、
前記第1磁気センサの出力信号の振幅をA1、前記第1磁気センサが検出している磁極に対応する磁極幅誤差補正値をE1、前記回転体の回転角をθとすると、前記第1磁気センサの出力信号S1は、S1=A1sin(E1θ)で表され、
前記第2磁気センサの出力信号の振幅をA2、前記第2磁気センサが検出している磁極の磁極幅誤差補正値E2とすると、前記第2磁気センサの出力信号S2は、S2=A2sin(E2θ+120)で表され、
前記第3磁気センサの出力信号の振幅をA3、前記第3磁気センサが検出している磁極の磁極幅誤差補正値E3とすると、前記第3磁気センサの出力信号S3は、S3=A3sin(E3θ+240)で表される、請求項2に記載の回転角演算装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012271640A JP6024971B2 (ja) | 2012-12-12 | 2012-12-12 | 回転角検出装置 |
| EP13196424.9A EP2743646B1 (en) | 2012-12-12 | 2013-12-10 | Rotation angle detection device |
| CN201310666346.0A CN103868449B (zh) | 2012-12-12 | 2013-12-10 | 旋转角检测装置 |
| US14/104,500 US9658050B2 (en) | 2012-12-12 | 2013-12-12 | Rotation angle detection device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012271640A JP6024971B2 (ja) | 2012-12-12 | 2012-12-12 | 回転角検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014115261A JP2014115261A (ja) | 2014-06-26 |
| JP6024971B2 true JP6024971B2 (ja) | 2016-11-16 |
Family
ID=49753041
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012271640A Expired - Fee Related JP6024971B2 (ja) | 2012-12-12 | 2012-12-12 | 回転角検出装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9658050B2 (ja) |
| EP (1) | EP2743646B1 (ja) |
| JP (1) | JP6024971B2 (ja) |
| CN (1) | CN103868449B (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6086205B2 (ja) * | 2012-12-12 | 2017-03-01 | 株式会社ジェイテクト | 位相差検出装置およびそれを備えた回転角検出装置 |
| CN107076576B (zh) * | 2014-10-20 | 2019-06-07 | 三菱电机株式会社 | 旋转角度检测装置、旋转电机和电梯用曳引机 |
| CN104457553B (zh) * | 2014-10-31 | 2017-04-19 | 中国电子科技集团公司第三十八研究所 | 一种大跨距天线主轴扭转度的检测装置及其检测方法 |
| FR3038724B1 (fr) * | 2015-07-10 | 2019-06-14 | Safran Landing Systems | Dispositif de mesure d'une vitesse relative de rotation et/ou d'une position angulaire relative entre deux elements tournants |
| JP6341350B2 (ja) * | 2016-05-13 | 2018-06-13 | 日本精工株式会社 | モータ駆動制御装置、電動パワーステアリング装置及び車両 |
| JP6996229B2 (ja) * | 2017-05-23 | 2022-02-04 | 日本精工株式会社 | 角度検出装置、相対角度検出装置、トルクセンサ、電動パワーステアリング装置及び車両 |
Family Cites Families (46)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06261524A (ja) * | 1993-03-08 | 1994-09-16 | Sony Corp | 回転検出装置 |
| JP2000205811A (ja) | 1999-01-08 | 2000-07-28 | Alps Electric Co Ltd | 回転型センサ |
| US20020124663A1 (en) | 1999-04-07 | 2002-09-12 | Yoshitomo Tokumoto | Rotational angle detecting device, torque detecting device and steering apparatus |
| JP2001174289A (ja) | 1999-12-17 | 2001-06-29 | Alps Electric Co Ltd | 回転角検出装置 |
| JP2002213944A (ja) | 2001-01-18 | 2002-07-31 | Niles Parts Co Ltd | 回転角測定装置 |
| DE10130988A1 (de) | 2001-06-27 | 2003-01-16 | Philips Corp Intellectual Pty | Justierung eines magnetoresistiven Winkelsensors |
| JP4143436B2 (ja) | 2003-02-17 | 2008-09-03 | トヨタ自動車株式会社 | 磁気式回転検出装置 |
| JP4042049B2 (ja) | 2003-04-16 | 2008-02-06 | 株式会社ジェイテクト | 電動パワーステアリング装置の操舵角検出装置 |
| JP4316960B2 (ja) | 2003-08-22 | 2009-08-19 | 株式会社半導体エネルギー研究所 | 装置 |
| WO2005043089A1 (ja) * | 2003-11-04 | 2005-05-12 | Nsk Ltd. | 電動パワーステアリング装置の制御装置 |
| JP2005186759A (ja) | 2003-12-25 | 2005-07-14 | Koyo Seiko Co Ltd | 電動パワーステアリング装置 |
| JP4613513B2 (ja) | 2004-04-28 | 2011-01-19 | 日本精工株式会社 | 電動パワーステアリング装置 |
| JP2006078392A (ja) | 2004-09-10 | 2006-03-23 | Tamagawa Seiki Co Ltd | レゾルバ信号の異常検出方法 |
| JP4797721B2 (ja) | 2005-10-20 | 2011-10-19 | 株式会社デンソー | 回転角度検出装置 |
| JP4254777B2 (ja) | 2005-11-11 | 2009-04-15 | トヨタ自動車株式会社 | 車輌用操舵制御装置 |
| JP4559982B2 (ja) | 2006-03-02 | 2010-10-13 | 株式会社東海理化電機製作所 | 回転角度検出装置及びその初期設定方法 |
| EP2026458A1 (en) | 2006-05-31 | 2009-02-18 | NSK Ltd. | Electric power steering device |
| JP2008026297A (ja) * | 2006-06-21 | 2008-02-07 | Nsk Ltd | 回転角度位置検出装置 |
| JP4329792B2 (ja) | 2006-08-10 | 2009-09-09 | トヨタ自動車株式会社 | 電動パワーステアリング装置 |
| JP4656024B2 (ja) | 2006-08-22 | 2011-03-23 | 株式会社デンソー | 回転角検出装置のための異常検出装置 |
| JP4419997B2 (ja) | 2006-08-28 | 2010-02-24 | トヨタ自動車株式会社 | 電動パワーステアリング装置 |
| US8115479B2 (en) | 2006-11-21 | 2012-02-14 | Hitachi Metals, Ltd. | Rotation-angle-detecting apparatus, rotating machine, and rotation-angle-detecting method |
| CN101460698B (zh) | 2006-12-15 | 2013-01-02 | 哈里伯顿能源服务公司 | 具有旋转天线结构的天线耦合元件测量工具 |
| JP4997472B2 (ja) | 2007-01-09 | 2012-08-08 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| DE102007008870A1 (de) * | 2007-02-21 | 2008-09-04 | Hl-Planar Technik Gmbh | Anordnung und Verfahren zur Absolutbestimmung der Linearposition oder der durch einen Winkel ausgedrückten Drehposition |
| JP2008241411A (ja) | 2007-03-27 | 2008-10-09 | Jtekt Corp | 舵角検出装置 |
| JP4330083B2 (ja) | 2007-05-18 | 2009-09-09 | 株式会社日本自動車部品総合研究所 | 回転角度検出装置 |
| JP2009098094A (ja) | 2007-10-19 | 2009-05-07 | Niles Co Ltd | 回転角度検出装置 |
| DE102009061783B3 (de) | 2008-01-29 | 2018-08-09 | Infineon Technologies Ag | Prädiktions-Phasenregelschleifensystem |
| JP2009247181A (ja) | 2008-03-31 | 2009-10-22 | Jtekt Corp | モータ制御装置および電動パワーステアリング装置 |
| JP2010048760A (ja) | 2008-08-25 | 2010-03-04 | Jtekt Corp | レゾルバの異常検出装置および電気式動力舵取装置 |
| JP2010110147A (ja) | 2008-10-31 | 2010-05-13 | Jtekt Corp | モータ駆動制御装置及び電動パワーステアリング装置 |
| JP5557021B2 (ja) | 2009-08-26 | 2014-07-23 | 株式会社ジェイテクト | 回転角検出装置 |
| JP4877397B2 (ja) | 2010-01-22 | 2012-02-15 | 株式会社デンソー | 電流センサの異常診断装置、およびセンサの異常診断装置 |
| CN102782457B (zh) * | 2010-03-03 | 2015-11-25 | 株式会社捷太格特 | 旋转角检测装置 |
| WO2011129190A1 (ja) * | 2010-04-16 | 2011-10-20 | 株式会社ジェイテクト | 回転角検出装置 |
| JP5229642B2 (ja) | 2010-08-06 | 2013-07-03 | 株式会社デンソー | モータ、および、それを用いた電動パワーステアリング装置 |
| JP2012093215A (ja) | 2010-10-27 | 2012-05-17 | Omron Automotive Electronics Co Ltd | 回転角度検出装置 |
| JP5807770B2 (ja) * | 2010-12-15 | 2015-11-10 | 株式会社ジェイテクト | 回転角検出装置 |
| JP5776925B2 (ja) | 2010-12-17 | 2015-09-09 | 株式会社ジェイテクト | 回転角検出装置 |
| JP5716954B2 (ja) * | 2011-01-17 | 2015-05-13 | 株式会社ジェイテクト | 回転角検出装置 |
| JP5720932B2 (ja) | 2011-01-17 | 2015-05-20 | 株式会社ジェイテクト | 回転角検出装置 |
| JP2012189377A (ja) * | 2011-03-09 | 2012-10-04 | Jtekt Corp | 回転角検出装置 |
| JP5389101B2 (ja) | 2011-04-26 | 2014-01-15 | 三菱電機株式会社 | モータ制御装置 |
| JP5942337B2 (ja) | 2011-04-28 | 2016-06-29 | 株式会社ジェイテクト | 車両用操舵装置 |
| JP6024969B2 (ja) * | 2012-12-12 | 2016-11-16 | 株式会社ジェイテクト | 回転角検出装置およびそれを備えた電動パワーステアリング装置 |
-
2012
- 2012-12-12 JP JP2012271640A patent/JP6024971B2/ja not_active Expired - Fee Related
-
2013
- 2013-12-10 CN CN201310666346.0A patent/CN103868449B/zh not_active Expired - Fee Related
- 2013-12-10 EP EP13196424.9A patent/EP2743646B1/en not_active Not-in-force
- 2013-12-12 US US14/104,500 patent/US9658050B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| EP2743646A1 (en) | 2014-06-18 |
| CN103868449B (zh) | 2018-04-03 |
| CN103868449A (zh) | 2014-06-18 |
| JP2014115261A (ja) | 2014-06-26 |
| US9658050B2 (en) | 2017-05-23 |
| US20140163922A1 (en) | 2014-06-12 |
| EP2743646B1 (en) | 2015-09-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6086205B2 (ja) | 位相差検出装置およびそれを備えた回転角検出装置 | |
| JP6024969B2 (ja) | 回転角検出装置およびそれを備えた電動パワーステアリング装置 | |
| JP5679136B2 (ja) | 回転角検出装置、および、回転角検出装置を備えた電動パワーステアリング装置 | |
| JP6024971B2 (ja) | 回転角検出装置 | |
| JP2016082685A (ja) | ブラシレスモータ及び電動パワーステアリング装置 | |
| JP6024970B2 (ja) | 回転角検出装置およびそれを備えた電動パワーステアリング装置 | |
| JP2018057084A (ja) | モータ制御装置 | |
| JP2014219364A (ja) | 回転角検出装置 | |
| JP6202302B2 (ja) | 回転角検出装置 | |
| JP2014139054A (ja) | 電動パワーステアリング装置 | |
| JP2016192882A (ja) | モータ制御装置 | |
| JP2014142322A (ja) | 回転角検出装置 | |
| JP2017229216A (ja) | モータ制御装置 | |
| EP2743647B1 (en) | Rotation angle detection device | |
| JP6024976B2 (ja) | 操舵角センサの信頼性判定装置 | |
| JP2017083422A (ja) | 回転角検出装置 | |
| JP2016013755A (ja) | 電動パワーステアリング装置 | |
| JP2014178178A (ja) | 磁気遮蔽部材およびトルク検出装置 | |
| JP2012254747A (ja) | 後輪転舵装置 | |
| JP2019156110A (ja) | 車両用操舵装置 | |
| JP2019124670A (ja) | 回転角検出装置、モータ制御装置、電動パワーステアリング装置、及び回転角検出方法 | |
| JP2019047534A (ja) | モータ制御装置 | |
| JP2014174098A (ja) | トルク検出装置およびそれを用いた電動パワーステアリング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151119 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160908 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160915 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160928 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6024971 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |