JP2012190041A - 光学素子操作装置 - Google Patents
光学素子操作装置 Download PDFInfo
- Publication number
- JP2012190041A JP2012190041A JP2012113006A JP2012113006A JP2012190041A JP 2012190041 A JP2012190041 A JP 2012190041A JP 2012113006 A JP2012113006 A JP 2012113006A JP 2012113006 A JP2012113006 A JP 2012113006A JP 2012190041 A JP2012190041 A JP 2012190041A
- Authority
- JP
- Japan
- Prior art keywords
- actuator
- optical element
- force control
- force
- actuator device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70216—Mask projection systems
- G03F7/70258—Projection system adjustments, e.g. adjustments during exposure or alignment during assembly of projection system
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/18—Mountings, adjusting means, or light-tight connections, for optical elements for prisms; for mirrors
- G02B7/182—Mountings, adjusting means, or light-tight connections, for optical elements for prisms; for mirrors for mirrors
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/18—Mountings, adjusting means, or light-tight connections, for optical elements for prisms; for mirrors
- G02B7/182—Mountings, adjusting means, or light-tight connections, for optical elements for prisms; for mirrors for mirrors
- G02B7/1822—Mountings, adjusting means, or light-tight connections, for optical elements for prisms; for mirrors for mirrors comprising means for aligning the optical axis
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/18—Mountings, adjusting means, or light-tight connections, for optical elements for prisms; for mirrors
- G02B7/182—Mountings, adjusting means, or light-tight connections, for optical elements for prisms; for mirrors for mirrors
- G02B7/1822—Mountings, adjusting means, or light-tight connections, for optical elements for prisms; for mirrors for mirrors comprising means for aligning the optical axis
- G02B7/1827—Motorised alignment
- G02B7/1828—Motorised alignment using magnetic means
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/18—Mountings, adjusting means, or light-tight connections, for optical elements for prisms; for mirrors
- G02B7/182—Mountings, adjusting means, or light-tight connections, for optical elements for prisms; for mirrors for mirrors
- G02B7/183—Mountings, adjusting means, or light-tight connections, for optical elements for prisms; for mirrors for mirrors specially adapted for very large mirrors, e.g. for astronomy, or solar concentrators
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/708—Construction of apparatus, e.g. environment aspects, hygiene aspects or materials
- G03F7/70808—Construction details, e.g. housing, load-lock, seals or windows for passing light in or out of apparatus
- G03F7/70825—Mounting of individual elements, e.g. mounts, holders or supports
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K41/00—Propulsion systems in which a rigid body is moved along a path due to dynamo-electric interaction between the body and a magnetic field travelling along the path
- H02K41/02—Linear motors; Sectional motors
- H02K41/035—DC motors; Unipolar motors
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Optics & Photonics (AREA)
- Epidemiology (AREA)
- Astronomy & Astrophysics (AREA)
- Electromagnetism (AREA)
- Power Engineering (AREA)
- Health & Medical Sciences (AREA)
- Environmental & Geological Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Public Health (AREA)
- Life Sciences & Earth Sciences (AREA)
- Combustion & Propulsion (AREA)
- Sustainable Development (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
- Mechanical Light Control Or Optical Switches (AREA)
- Physical Or Chemical Processes And Apparatus (AREA)
- Mounting And Adjusting Of Optical Elements (AREA)
- Lenses (AREA)
Abstract
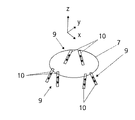
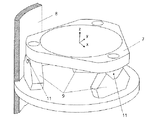
【解決手段】少なくとも3つのアクチュエータデバイスを介して、構造体について、光学素子を6自由度まで操作する装置であって、各アクチュエータデバイス9が、少なくとも2つの力制御アクチュエータを備え、各力制御アクチュエータが、1自由度の有効な力を生成すると共に、アクチュエータデバイス9の連結点11が、光学素子7に直接作用する。
【選択図】図5
Description
光学素子、特にミラーは、たいていの場合、3自由度で操作されており、例えばピエゾアクチュエータがこのために使用されている。
本発明に基づく手段は、6自由度までの光学素子または光学アセンブリの正確かつ迅速な操作性能を提供する。力制御アクチュエータの使用により、作用の方向と異なる残りの自由度をほとんど変える必要がなく、このことは、寄生的な力を補正するために中間弾性要素あるいはソケットの必要としないことを意味し、したがって、例えば作用力の方向における、配置の全体の剛性を増加し、位置決め精度を向上する。
異なるアクチュエータデバイスにより提供される少なくとも2自由度について、少なくとも2つのアクチュエータデバイスの自由度が、線形独立になるように、アクチュエータデバイスが、互いについて配置されていると好ましい。
請求項2,18,33に関する利点は、請求項1について、また明細書から、すでに記載されている利点と同様である。
図1からわかるように、EUV投射照明システム1は、光源2と、構造化マスクが配置されている平面4のフィールドを照明するためのEUV照射システム3と、平面4の構造化マスクを感光基板上に結像するための投影レンズ5とを備える。このようなEUV投射照明システムは、ヨーロッパ特許公報EP1278089A2により知られている。
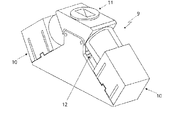
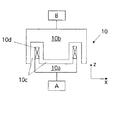
図7は、本発明に基づく力制御アクチュエータを概略的に示している。アクチュエータ10は、第1要素10a及び第2要素10bを備える。要素10a及び10bは、相互運動が可能である。要素10a及び10bの両方が、部品A及びBに接続されており、本発明の応用例においては、一方の部品が光学素子であり、他方の部品がハウジングのような構造体である。第1及び第2要素10a、10bは、両方の要素間の間隙10cに、ガスまたは真空しか存在しないように、機械的に分断されている。要素10a、10bのうちの一方の要素が、ソレノイド10dを備えるのが好ましい。ソレノイド10dに電流が流されると、間隙10cまたは間隙10cの一部が変更され、要素10a、10bは、部品A,Bと共に、相互運動する。間隙10cが、x及び/またはz方向に、+/−300マイクロメートルの動きが可能な大きさであると好ましい。
パッシブ代替モジュールは、その後の操作時の関係と同じ力関係に基づいたミラー7の設計を可能にし、重力(図示せず)から生じるミラー変形を補正するために、製造段階で使用されることができる。
Claims (44)
- 少なくとも3つのアクチュエータデバイスを介して、構造体について、光学素子を6自由度まで操作する装置であって、各アクチュエータデバイス(9)が、少なくとも2つの力制御アクチュエータ(10)を備え、各力制御アクチュエータ(10)が、1自由度の有効な力を生成すると共に、アクチュエータデバイス(9)の連結点(11)が、光学素子(7)に直接作用することを特徴とする装置。
- 少なくとも3つのアクチュエータデバイスを介して、構造体について、光学素子を6自由度まで操作する装置であって、アクチュエータデバイス(9)の連結点(11)が、光学素子(7)に直接作用すると共に、光学素子(7)上の、アクチュエータデバイス(9)の連結点(11)によりカバーされる平面が、少なくともほぼ光学素子(7)の中立面上にあることを特徴とする装置。
- 3つのアクチュエータデバイス(9)が設けられていることを特徴とする、請求項1または2に記載の装置。
- 各アクチュエータデバイス(9)が、少なくとも2つの力制御アクチュエータ(10)を備え、各力制御アクチュエータ(10)が、1自由度の有効な力を生成することを特徴とする、請求項2または3に記載の装置。
- アクチュエータデバイス(9)の少なくとも2つの力制御アクチュエータ(10)のそれぞれが、1つの平面内に配置されていて、互いについて、およそ60°から120°、好ましくは90°の角度にあることを特徴とする、請求項1ないし4のいずれかに記載の装置。
- 各アクチュエータデバイス(9)が、光学素子(7)の重力を補正するための反力要素として重力補正装置を備えることを特徴とする、請求項1ないし5のいずれかに記載の装置。
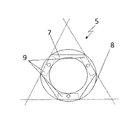
- アクチュエータデバイス(9)の各力制御アクチュエータ10によりカバーされる3つの平面は、重力に平行であり、重力に平行な投影において、3角形を形成することを特徴とする、請求項1、3ないし6のいずれかに記載の装置。
- アクチュエータデバイス(9)は、光学素子(7)の周囲にほぼ均等の間隔、好ましくは120°の3つの間隔で、配置されていることを特徴とする、請求項1ないし7のいずれかに記載の装置。
- 光学素子(7)上の、アクチュエータデバイス(9)の連結点(11)によりカバーされる平面が、少なくともほぼ光学素子(7)の中立面上にあることを特徴とする、請求項1、3ないし8のいずれかに記載の装置。
- アクチュエータデバイス(9)の少なくとも2つの力制御アクチュエータ(10)の有効な力のそれぞれが、好ましくは光学素子(7)上の共有点を通ることを特徴とする、請求項1、3ないし9のいずれかに記載の装置。
- 重力補正装置(12)の有効な力が、重力にほぼ平行であり、好ましくはアクチュエータデバイス(9)の2つの力制御アクチュエータ(10)の有効な力のそれぞれの共有点を通ることを特徴とする、請求項6ないし10のいずれかに記載の装置。
- アクチュエータデバイス(9)の少なくとも2つの力制御アクチュエータ(10)の有効な力のそれぞれ、及び/または、重力補正装置(12)が、好ましくは磁力により、光学素子(7)から機械的に分断されていることを特徴とする、請求項6ないし11のいずれかに記載の装置。
- 光学素子(7)の位置決めのために、センサが設けられていることを特徴とする、請求項1ないし12のいずれかに記載の装置。
- 製造段階及びその後の使用における力方向及び作用点を一致させることにより、アクチュエータデバイス(9)を、製造目的で、パッシブ代替モジュールに置換することができることを特徴とする、請求項1ないし13のいずれかに記載の装置。
- 力制御アクチュエータが、電磁気または静磁気的な形態、具体的にはロレンツアクチュエータ(10)であることを特徴とする、請求項1,3ないし14のいずれかに記載の装置。
- 光学素子が、ミラー(7)の形態であることを特徴とする、請求項2ないし15のいずれかに記載の装置。
- 構造体が、投影レンズ(5)、具体的にはEUV範囲において半導体部品を製造するためのマイクロリソグラフィのための投射照明システム(1)のハウジング(8)またはセンサフレームであることを特徴とする、請求項1ないし16のいずれかに記載の装置。
- 少なくとも3つのアクチュエータデバイスを介して、構造体について、光学素子を6自由度まで操作する装置であって、各アクチュエータデバイス(9)が、少なくとも2つの力制御アクチュエータ(10)を備え、各力制御アクチュエータ(10)が、1自由度の有効な力を生成することを特徴とする装置。
- 3つのアクチュエータデバイス(9)が設けられていることを特徴とする、請求項18に装置。
- アクチュエータデバイス(9)の少なくとも2つの力制御アクチュエータ(10)のそれぞれが、1つの平面内に配置されていて、互いについて、およそ60°から120°、好ましくは90°の角度にあることを特徴とする、請求項18または19に記載の装置。
- 各アクチュエータデバイス(9)が、光学素子(7)の重力を補正するための反力要素として重力補正装置を備えることを特徴とする、請求項18または19または20に記載の装置。
- アクチュエータデバイス(9)の各力制御アクチュエータ10によりカバーされる3つの平面は、重力に平行であり、重力に平行な投影において、3角形を形成することを特徴とする、請求項18ないし21のいずれかに記載の装置。
- アクチュエータデバイス(9)は、光学素子(7)の周囲にほぼ均等の間隔、好ましくは120°の3つの間隔で、配置されていることを特徴とする、請求項18ないし22のいずれかに記載の装置。
- アクチュエータデバイス(9)の少なくとも2つの力制御アクチュエータ(10)の有効な力のそれぞれが、好ましくは光学アセンブリ上の共有点を通ることを特徴とする、請求項18ないし23のいずれかに記載の装置。
- 重力補正装置(12)の有効な力が、重力にほぼ平行であり、好ましくはアクチュエータデバイス(9)の2つの力制御アクチュエータ(10)の有効な力のそれぞれの共有点を通ることを特徴とする、請求項18ないし24のいずれかに記載の装置。
- アクチュエータデバイス(9)の少なくとも2つの力制御アクチュエータ(10)の有効な力のそれぞれ、及び/または、重力補正装置(12)が、好ましくは磁力により、光学アセンブリから機械的に分断されていることを特徴とする、請求項18ないし25のいずれかに記載の装置。
- 光学アセンブリの位置決めのために、センサが設けられていることを特徴とする、請求項18ないし26のいずれかに記載の装置。
- 製造段階及びその後の使用における重力方向及び作用点を一致させることにより、アクチュエータデバイス(9)を、製造目的で、パッシブ代替モジュールに置換することができることを特徴とする、請求項18ないし27のいずれかに記載の装置。
- 力制御アクチュエータが、電磁気または静磁気的な形態、具体的にはロレンツアクチュエータ(10)であることを特徴とする、請求項18ないし28に記載の装置。
- 構造体が、投影レンズ(5)、具体的にはEUV範囲において半導体部品を製造するためのマイクロリソグラフィのための投射照明システム(1)のハウジング(8)またはセンサフレームであることを特徴とする、請求項18ないし29のいずれかに記載の装置。
- 光学アセンブリが、少なくとも1つの光学素子と、少なくとも1つのソケット要素とを備えることを特徴とする、請求項18ないし30のいずれかに記載の装置。
- 投影レンズ(5)、具体的にはEUV範囲において半導体部品を製造するためのマイクロリソグラフィのための投射照明システム(1)であって、ハウジング(8)に配置された2つ以上の光学素子(7)を備え、少なくとも1つの光学素子(7)が、請求項1ないし17のいずれかに記載の装置により、ハウジング(8)について操作されることができるように取り付けられていることを特徴とする投影レンズ。
- 構造体(8)に光学素子(7)または光学アセンブリを直接連結するためのアクチュエータデバイスであって、それぞれ1自由度の有効な力を生成し、互いについて、およそ60°ないし120°、好ましくは90°の角度で1つの平面内に配置されている少なくとも2つの力制御アクチュエータ(10)を備えることを特徴とするアクチュエータデバイス。
- 少なくとも2つの力制御アクチュエータ(10)の有効な力のそれぞれが、好ましくは光学素子(7)上または光学アセンブリ上の共有点を通ることを特徴とする、請求項33に記載のアクチュエータデバイス。
- 光学素子(7)または光学アセンブリの重力を補正するための反力要素として重力補正装置により特徴付けられ、重力補正装置の有効な力が、重力にほぼ平行であり、好ましくは2つの力制御アクチュエータ(10)の有効な力の共通の交点を通ることを特徴とする請求項33または34に記載のアクチュエータデバイス。
- 光学素子(7)上の連結点(11)が、少なくともほぼ光学素子(7)の中立面上にあることを特徴とする、請求項33または34または35に記載のアクチュエータデバイス。
- 相互運動が可能な第1要素10a及び第2要素10bを備え、第1要素10a及び第2要素10bが、第1及び第2要素10a、10b間にガスまたは真空のみが存在するように機械的に分断されていることを特徴とする、1自由度の有効な力を生成する力制御アクチュエータ10。
- 一方の要素10bが、同じタイプの第2力制御アクチュエータ10の一方の要素10bに、連結要素15により機械的に連結されていることを特徴とする、請求項37に記載の第1力制御アクチュエータ10。
- 少なくとも1つのアクチュエータが作動している場合、連結要素15が少なくとも1自由度の動きが可能であることを特徴とする、請求項38に記載のアクチュエータデバイス。
- 2つの力制御アクチュエータが作動している場合、連結要素15が2自由度の動きが可能であることを特徴とする、請求項39に記載のアクチュエータデバイス。
- 請求項37に記載の力制御アクチュエータを備えた請求項33ないし36のいずれかに記載のアクチュエータ。
- 請求項37に記載の力制御アクチュエータを備えた請求項1ないし31のいずれかに記載の装置。
- 請求項37に記載の力制御アクチュエータを備えた請求項32に記載の投影レンズ。
- 請求項1ないし31に記載の装置または請求項32の投影レンズにおける請求項37ないし40のいずれかに記載の力制御アクチュエータの応用。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US50233403P | 2003-09-12 | 2003-09-12 | |
| US60/502,334 | 2003-09-12 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006525734A Division JP5041810B2 (ja) | 2003-09-12 | 2004-09-07 | 光学素子操作装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012190041A true JP2012190041A (ja) | 2012-10-04 |
| JP5779545B2 JP5779545B2 (ja) | 2015-09-16 |
Family
ID=34312383
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006525734A Expired - Fee Related JP5041810B2 (ja) | 2003-09-12 | 2004-09-07 | 光学素子操作装置 |
| JP2012113006A Expired - Fee Related JP5779545B2 (ja) | 2003-09-12 | 2012-05-17 | 光学素子操作装置 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006525734A Expired - Fee Related JP5041810B2 (ja) | 2003-09-12 | 2004-09-07 | 光学素子操作装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (3) | US20070052301A1 (ja) |
| EP (1) | EP1664880A2 (ja) |
| JP (2) | JP5041810B2 (ja) |
| KR (1) | KR101129119B1 (ja) |
| CN (1) | CN1879046B (ja) |
| TW (1) | TWI360675B (ja) |
| WO (1) | WO2005026801A2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016157103A (ja) * | 2015-01-26 | 2016-09-01 | カール・ツァイス・エスエムティー・ゲーエムベーハー | 構成体及び構成体を備えたリソグラフィ装置 |
Families Citing this family (56)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1879046B (zh) * | 2003-09-12 | 2010-07-14 | 卡尔蔡司Smt股份公司 | 光学元件操纵仪 |
| WO2005083487A1 (en) | 2004-02-26 | 2005-09-09 | Carl Zeiss Smt Ag | Housing structure |
| US7738193B2 (en) | 2004-06-29 | 2010-06-15 | Carl Zeiss Smt Ag | Positioning unit and alignment device for an optical element |
| WO2007086557A1 (ja) * | 2006-01-30 | 2007-08-02 | Nikon Corporation | 光学部材保持装置、光学部材の位置調整方法、及び露光装置 |
| EP1882983A1 (en) * | 2006-07-25 | 2008-01-30 | Carl Zeiss SMT AG | Gravity compensating support for an optical element |
| DE102007047109A1 (de) | 2007-10-01 | 2009-04-09 | Carl Zeiss Smt Ag | Optisches System, insbesondere Projektionsobjektiv der Mikrolithographie |
| DE102008054581A1 (de) | 2008-02-29 | 2009-09-03 | Carl Zeiss Smt Ag | Projektionssystem für eine Projektionsbelichtungsanlage sowie Komponentenhalterung, Retikel-Halteeinrichtung und Wafer-Halteeinrichtung für ein derartiges Projektionssystem |
| FR2933782B1 (fr) * | 2008-07-11 | 2010-08-13 | Thales Sa | Dispositif de correction des defauts optiques d'un miroir de telescope |
| DE102009034166A1 (de) * | 2008-08-11 | 2010-02-18 | Carl Zeiss Smt Ag | Kontaminationsarme optische Anordnung |
| DE102009033818A1 (de) | 2008-09-19 | 2010-03-25 | Carl Zeiss Smt Ag | Temperiervorrichtung für eine optische Baugruppe |
| JP5134732B2 (ja) * | 2008-10-31 | 2013-01-30 | カール・ツァイス・エスエムティー・ゲーエムベーハー | Euvマイクロリソグラフィ用の照明光学系 |
| JP5634521B2 (ja) | 2009-09-08 | 2014-12-03 | カール・ツァイス・エスエムティー・ゲーエムベーハー | 表面外形(surfacefigure)変形の少ない光学素子 |
| DE102010028941B4 (de) * | 2010-05-12 | 2012-03-22 | Carl Zeiss Smt Gmbh | Vorrichtung für eine optische Anordnung und Verfahren zum Positionieren eines optischen Elements einer optischen Anordnung |
| DE102011079072A1 (de) | 2010-07-26 | 2012-03-15 | Carl Zeiss Smt Gmbh | Verfahren sowie Anordnung zur Aktuierung eines optischen Elementes |
| TWI501046B (zh) | 2010-07-30 | 2015-09-21 | 卡爾蔡司Smt有限公司 | 超紫外線曝光裝置 |
| FR2967742B1 (fr) * | 2010-11-23 | 2013-11-22 | Astrium Sas | Dispositif d'isolation vibratoire |
| JP6309765B2 (ja) | 2010-12-20 | 2018-04-11 | カール・ツァイス・エスエムティー・ゲーエムベーハー | 光学素子を取り付ける配置構成 |
| DE102011082994A1 (de) | 2011-09-20 | 2013-03-21 | Carl Zeiss Smt Gmbh | Anordnung zur Halterung eines optischen Elementes, insbesondere in einer EUV-Projektionsbelichtungsanlage |
| DE102011004299A1 (de) | 2011-02-17 | 2012-08-23 | Carl Zeiss Smt Gmbh | Anordnung zur Halterung eines optischen Elementes, insbesondere in einer EUV-Projektionsbelichtungsanlage |
| JP6091434B2 (ja) | 2011-02-17 | 2017-03-08 | カール・ツァイス・エスエムティー・ゲーエムベーハー | 光学マウント及びeuv露光装置 |
| WO2013050081A1 (en) | 2011-10-07 | 2013-04-11 | Carl Zeiss Smt Gmbh | Method for controlling a motion of optical elements in lithography systems |
| DE102011086513A1 (de) | 2011-11-16 | 2013-05-16 | Carl Zeiss Smt Gmbh | Projektionsbelichtungsverfahren und Projektionsbelichtungsanlage für die Mikrolithographie |
| DE102012202167A1 (de) * | 2012-02-14 | 2013-08-14 | Carl Zeiss Smt Gmbh | Vorrichtung zur magnetfeldkompensierten Positionierung eines Bauelements |
| NL2011276A (en) * | 2012-09-06 | 2014-03-10 | Asml Netherlands Bv | Inspection method and apparatus and lithographic processing cell. |
| BR112015004409A2 (pt) * | 2012-10-05 | 2017-07-04 | Koninklijke Philips Nv | dispositivo rotativo de posicionamento |
| US20140133897A1 (en) * | 2012-11-12 | 2014-05-15 | Micheal Brendan O Ceallaigh | Flexurally mounted kinematic coupling with improved repeatability |
| DE102013201082A1 (de) * | 2013-01-24 | 2014-03-13 | Carl Zeiss Smt Gmbh | Anordnung zur Aktuierung eines Elementes in einer mikrolithographischen Projektionsbelichtungsanlage |
| DE102013203032A1 (de) | 2013-02-25 | 2014-02-27 | Carl Zeiss Smt Gmbh | Optische Anordnung mit einem optischen Element und einem zusätzlichen Wärmeleitelement |
| DE102013204317B4 (de) | 2013-03-13 | 2015-07-23 | Carl Zeiss Smt Gmbh | Baugruppe einer mikrolithographischen Projektionsbelichtungsanlage |
| DE102013204305A1 (de) * | 2013-03-13 | 2014-09-18 | Carl Zeiss Smt Gmbh | Anordnung zur Aktuierung wenigstens eines Elementes in einem optischen System |
| JP6432744B2 (ja) * | 2013-12-27 | 2018-12-05 | パナソニックIpマネジメント株式会社 | 光学部材駆動装置及び投写型映像表示装置 |
| NL1040605C2 (en) * | 2014-01-15 | 2015-07-16 | Janssen Prec Engineering | Electromagnetically actuated hexapod for nanometric positioning. |
| NL1040702B1 (en) * | 2014-03-04 | 2015-10-27 | Janssen Prec Eng | Cryo hexapod positioning system. |
| CN106170727B (zh) | 2014-04-17 | 2019-07-05 | Asml荷兰有限公司 | 光刻设备和器件制造方法 |
| US10471610B2 (en) | 2015-06-16 | 2019-11-12 | Samsung Electronics Co., Ltd. | Robot arm having weight compensation mechanism |
| DE102015217119A1 (de) | 2015-09-08 | 2017-03-09 | Carl Zeiss Smt Gmbh | Elektromagnetischer Antrieb mit einem Stator und einem Statorhalter |
| DE102015220494A1 (de) | 2015-10-21 | 2016-10-06 | Carl Zeiss Smt Gmbh | Tauchspulenaktuator |
| DE102015225537B4 (de) | 2015-12-17 | 2019-11-14 | Carl Zeiss Smt Gmbh | Vorrichtung zur Ausrichtung eines Bauteils, Betätigungseinrichtung und Projektionsbelichtungsanlage |
| WO2017207016A1 (en) * | 2016-05-30 | 2017-12-07 | Carl Zeiss Smt Gmbh | Optical imaging arrangement with a piezoelectric device |
| JP7051834B2 (ja) | 2016-09-30 | 2022-04-11 | 3エスエーイー テクノロジーズ インク | 多軸相対位置決めステージ |
| US11681100B2 (en) | 2016-09-30 | 2023-06-20 | 3Sae Technologies, Inc. | Multi-axis positioner |
| DE102016226085A1 (de) | 2016-12-22 | 2017-03-02 | Carl Zeiss Smt Gmbh | Gewichtskraftkompensationseinrichtung |
| DE102017206494A1 (de) | 2017-04-18 | 2017-06-14 | Carl Zeiss Smt Gmbh | Anordnung zur Halterung eines optischen Elementes in einer mikrolithographischen Projektionsbelichtungsanlage |
| DE102017207763A1 (de) | 2017-05-09 | 2018-04-19 | Carl Zeiss Smt Gmbh | Gelenkanordnung für ein optisches Element, insbesondere in einer mikrolithographischen Projektionsbelichtungsanlage |
| DE102017209794B4 (de) | 2017-06-09 | 2023-05-17 | Carl Zeiss Smt Gmbh | Vorrichtung und Verfahren zur Ausrichtung eines optischen Elements, sowie Projektionsbelichtungsanlage |
| CN107145040B (zh) * | 2017-06-30 | 2019-04-02 | 中国科学院长春光学精密机械与物理研究所 | 光学元件运动学支撑装置、投影物镜和光刻机 |
| DE102017212773A1 (de) | 2017-07-25 | 2019-01-31 | Carl Zeiss Smt Gmbh | Gewichtskraftkompensationseinrichtung |
| CN108227110A (zh) * | 2018-01-30 | 2018-06-29 | 中国科学院上海技术物理研究所 | 一种反射镜调节与固定装置 |
| DE102018216934A1 (de) | 2018-10-02 | 2019-09-05 | Carl Zeiss Smt Gmbh | Baugruppe, insbesondere in einer mikrolithographischen Projektionsbelichtungsanlage |
| DE102018216964A1 (de) | 2018-10-02 | 2020-04-02 | Carl Zeiss Smt Gmbh | Aktuatoreinrichtung zur Ausrichtung eines Elements, Projektionsbelichtungsanlage für die Halbleiterlithografie und Verfahren zur Ausrichtung eines Elements |
| DE102018219375A1 (de) | 2018-11-13 | 2019-01-03 | Carl Zeiss Smt Gmbh | Lastabtragende Haltestruktur |
| CN109765937B (zh) * | 2019-01-31 | 2021-12-21 | 华中科技大学苏州脑空间信息研究院 | 全自由度调节的扫描装置及运动建模方法及控制方法 |
| CN109696752B (zh) * | 2019-01-31 | 2021-05-18 | 华中科技大学苏州脑空间信息研究院 | 光学元器件的全自由度调节装置及其重复定位方法 |
| DE102019202868A1 (de) | 2019-03-04 | 2020-09-10 | Carl Zeiss Smt Gmbh | Aktuatoreinrichtung und Verfahren zur Ausrichtung eines optischen Elements, optische Baugruppe sowie Projektionsbelichtungsanlage |
| DE102020205306A1 (de) | 2020-04-27 | 2021-10-28 | Carl Zeiss Smt Gmbh | Baugruppe, insbesondere in einer mikrolithographischen Projektionsbelichtungsanlage |
| CN115980962A (zh) * | 2022-11-30 | 2023-04-18 | 中国科学院长春光学精密机械与物理研究所 | 一种聚光结构、装置以及系统 |
Citations (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11251409A (ja) * | 1998-03-02 | 1999-09-17 | Nikon Corp | 位置決め装置、及び露光装置 |
| JPH11274031A (ja) * | 1998-03-20 | 1999-10-08 | Canon Inc | 露光装置およびデバイス製造方法ならびに位置決め装置 |
| JP2000201471A (ja) * | 1998-11-10 | 2000-07-18 | Asm Lithography Bv | アクチュエ―タおよび変換器 |
| JP2001351855A (ja) * | 1999-11-30 | 2001-12-21 | Asm Lithography Bv | リソグラフィ投影装置およびこれを使ったデバイスの製造方法 |
| JP2002501222A (ja) * | 1998-01-22 | 2002-01-15 | アエロスパシャル ソシエテ ナショナル アンデュストリエル | 宇宙望遠鏡の鏡などの装置のための、位置補正機能をもつ一体および小型の均衡取付けアセンブリ |
| JP2002025903A (ja) * | 2000-04-17 | 2002-01-25 | Asm Lithography Bv | リトグラフ装置、デバイス製造方法、およびそれにより製造されたデバイス |
| JP2002131605A (ja) * | 2000-08-18 | 2002-05-09 | Nikon Corp | 保持装置、光学素子保持装置、鏡筒及び露光装置並びにマイクロデバイスの製造方法 |
| JP2002359170A (ja) * | 2001-05-30 | 2002-12-13 | Nikon Corp | ステージ装置及び露光装置 |
| JP2003188066A (ja) * | 2001-11-07 | 2003-07-04 | Asml Netherlands Bv | リソグラフィ装置およびデバイス製造方法 |
| JP2003203860A (ja) * | 2001-12-21 | 2003-07-18 | Asml Netherlands Bv | リソグラフィ装置およびデバイス製造方法 |
| JP2004281654A (ja) * | 2003-03-14 | 2004-10-07 | Canon Inc | 駆動機構及びそれを用いた露光装置、デバイスの製造方法 |
| JP2004281644A (ja) * | 2003-03-14 | 2004-10-07 | Canon Inc | 駆動機構及びそれを用いた露光装置、デバイスの製造方法 |
| JP2005064474A (ja) * | 2003-07-31 | 2005-03-10 | Canon Inc | 位置決め機構、露光装置及びデバイスの製造方法 |
| JP2005072221A (ja) * | 2003-08-25 | 2005-03-17 | Nikon Corp | 露光装置及びその調整方法 |
| JP2007505345A (ja) * | 2003-09-12 | 2007-03-08 | カール・ツァイス・エスエムティー・アーゲー | 光学素子操作装置 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4726671A (en) * | 1986-06-19 | 1988-02-23 | The Perkin-Elmer Corporation | High resonance adjustable mirror mount |
| JP2878955B2 (ja) * | 1993-04-08 | 1999-04-05 | 日立金属株式会社 | 高精度リニアモータ |
| EP0642084A1 (de) * | 1993-08-04 | 1995-03-08 | Siemens Aktiengesellschaft | Integrierte Logikschaltung mit Testmöglichkeit |
| DE4329928A1 (de) * | 1993-09-04 | 1995-03-09 | Zeiss Carl Fa | Spiegelstützsystem mit Kraftmeßzellen |
| JP3506158B2 (ja) * | 1995-04-14 | 2004-03-15 | 株式会社ニコン | 露光装置及び走査型露光装置、並びに走査露光方法 |
| DE29607680U1 (de) * | 1996-04-27 | 1996-06-20 | Carl Zeiss Jena Gmbh, 07745 Jena | Anordnung zur Verringerung der Crashgefahr bei universellen Positioniersystemen |
| JP3678887B2 (ja) | 1997-03-18 | 2005-08-03 | 株式会社リコー | 三次元形状測定装置 |
| FR2761486B1 (fr) * | 1997-03-28 | 1999-05-21 | Centre Nat Etd Spatiales | Dispositif de positionnement micrometrique d'un support d'element optique spatial selon six degres de liberte |
| JPH11274301A (ja) | 1998-03-23 | 1999-10-08 | Nkk Corp | メタル配線構造体 |
| US5986827A (en) * | 1998-06-17 | 1999-11-16 | The Regents Of The University Of California | Precision tip-tilt-piston actuator that provides exact constraint |
| EP1001512A3 (en) | 1998-11-10 | 2001-02-14 | Asm Lithography B.V. | Actuator and transducer |
| US6556364B2 (en) * | 2000-04-25 | 2003-04-29 | Michael F. Meehan | Apparatus, system, and method for precision positioning and alignment of a lens in an optical system |
| EP1744193A1 (en) | 2000-08-18 | 2007-01-17 | Nikon Corporation | Optical element holding device with drive mechanism allowing movement of the element along three coordinate axes |
| DE10134387A1 (de) | 2001-07-14 | 2003-01-23 | Zeiss Carl | Optisches System mit mehreren optischen Elementen |
| US6543740B2 (en) * | 2001-09-04 | 2003-04-08 | National Research Council Of Canada | Mechanism for transmitting movement in up to six degrees-of-freedom |
| US6850675B1 (en) * | 2002-02-04 | 2005-02-01 | Siwave, Inc. | Base, payload and connecting structure and methods of making the same |
| JP2003346359A (ja) * | 2002-05-27 | 2003-12-05 | Pioneer Electronic Corp | レンズ駆動装置用コイル基板及びレンズ駆動装置 |
| JP2004062091A (ja) * | 2002-07-31 | 2004-02-26 | Canon Inc | 保持装置、露光装置及びデバイス製造方法 |
| EP1457834A3 (en) * | 2003-03-14 | 2008-10-29 | Canon Kabushiki Kaisha | Positioning apparatus, exposure apparatus and method for producing device |
| US7281808B2 (en) * | 2003-06-21 | 2007-10-16 | Qortek, Inc. | Thin, nearly wireless adaptive optical device |
| US20070284502A1 (en) * | 2006-06-13 | 2007-12-13 | Nikon Corporation | Hexapod kinematic mountings for optical elements, and optical systems comprising same |
-
2004
- 2004-09-07 CN CN2004800333165A patent/CN1879046B/zh not_active Expired - Fee Related
- 2004-09-07 US US10/571,708 patent/US20070052301A1/en not_active Abandoned
- 2004-09-07 JP JP2006525734A patent/JP5041810B2/ja not_active Expired - Fee Related
- 2004-09-07 KR KR1020067004904A patent/KR101129119B1/ko active IP Right Grant
- 2004-09-07 EP EP04764887A patent/EP1664880A2/en not_active Withdrawn
- 2004-09-07 WO PCT/EP2004/009941 patent/WO2005026801A2/en active Application Filing
- 2004-09-10 TW TW093127443A patent/TWI360675B/zh not_active IP Right Cessation
-
2008
- 2008-10-07 US US12/246,992 patent/US20090050776A1/en not_active Abandoned
-
2010
- 2010-03-03 US US12/716,357 patent/US8179621B2/en not_active Expired - Fee Related
-
2012
- 2012-05-17 JP JP2012113006A patent/JP5779545B2/ja not_active Expired - Fee Related
Patent Citations (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002501222A (ja) * | 1998-01-22 | 2002-01-15 | アエロスパシャル ソシエテ ナショナル アンデュストリエル | 宇宙望遠鏡の鏡などの装置のための、位置補正機能をもつ一体および小型の均衡取付けアセンブリ |
| JPH11251409A (ja) * | 1998-03-02 | 1999-09-17 | Nikon Corp | 位置決め装置、及び露光装置 |
| JPH11274031A (ja) * | 1998-03-20 | 1999-10-08 | Canon Inc | 露光装置およびデバイス製造方法ならびに位置決め装置 |
| JP2000201471A (ja) * | 1998-11-10 | 2000-07-18 | Asm Lithography Bv | アクチュエ―タおよび変換器 |
| JP2001351855A (ja) * | 1999-11-30 | 2001-12-21 | Asm Lithography Bv | リソグラフィ投影装置およびこれを使ったデバイスの製造方法 |
| JP2002025903A (ja) * | 2000-04-17 | 2002-01-25 | Asm Lithography Bv | リトグラフ装置、デバイス製造方法、およびそれにより製造されたデバイス |
| JP2002131605A (ja) * | 2000-08-18 | 2002-05-09 | Nikon Corp | 保持装置、光学素子保持装置、鏡筒及び露光装置並びにマイクロデバイスの製造方法 |
| JP2002359170A (ja) * | 2001-05-30 | 2002-12-13 | Nikon Corp | ステージ装置及び露光装置 |
| JP2003188066A (ja) * | 2001-11-07 | 2003-07-04 | Asml Netherlands Bv | リソグラフィ装置およびデバイス製造方法 |
| JP2003203860A (ja) * | 2001-12-21 | 2003-07-18 | Asml Netherlands Bv | リソグラフィ装置およびデバイス製造方法 |
| JP2004281654A (ja) * | 2003-03-14 | 2004-10-07 | Canon Inc | 駆動機構及びそれを用いた露光装置、デバイスの製造方法 |
| JP2004281644A (ja) * | 2003-03-14 | 2004-10-07 | Canon Inc | 駆動機構及びそれを用いた露光装置、デバイスの製造方法 |
| JP2005064474A (ja) * | 2003-07-31 | 2005-03-10 | Canon Inc | 位置決め機構、露光装置及びデバイスの製造方法 |
| JP2005072221A (ja) * | 2003-08-25 | 2005-03-17 | Nikon Corp | 露光装置及びその調整方法 |
| JP2007505345A (ja) * | 2003-09-12 | 2007-03-08 | カール・ツァイス・エスエムティー・アーゲー | 光学素子操作装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016157103A (ja) * | 2015-01-26 | 2016-09-01 | カール・ツァイス・エスエムティー・ゲーエムベーハー | 構成体及び構成体を備えたリソグラフィ装置 |
| US9632421B2 (en) | 2015-01-26 | 2017-04-25 | Carl Zeiss Smt Gmbh | Arrangement and lithography apparatus with arrangement |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2005026801A3 (en) | 2005-06-16 |
| US20090050776A1 (en) | 2009-02-26 |
| US20070052301A1 (en) | 2007-03-08 |
| CN1879046A (zh) | 2006-12-13 |
| KR20070019642A (ko) | 2007-02-15 |
| TW200519445A (en) | 2005-06-16 |
| US8179621B2 (en) | 2012-05-15 |
| JP5041810B2 (ja) | 2012-10-03 |
| WO2005026801A2 (en) | 2005-03-24 |
| CN1879046B (zh) | 2010-07-14 |
| JP5779545B2 (ja) | 2015-09-16 |
| JP2007505345A (ja) | 2007-03-08 |
| EP1664880A2 (en) | 2006-06-07 |
| US20100157270A1 (en) | 2010-06-24 |
| KR101129119B1 (ko) | 2012-03-26 |
| TWI360675B (en) | 2012-03-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5779545B2 (ja) | 光学素子操作装置 | |
| JP4656448B2 (ja) | 投影光学装置及び露光装置 | |
| US8416392B2 (en) | Optical imaging arrangement | |
| US10386732B2 (en) | Bearing assembly for a lithography system, and lithography system | |
| US9696518B2 (en) | Position manipulator for an optical component | |
| JP2008519456A (ja) | 精密ステージのz支持装置 | |
| JPWO2006022200A1 (ja) | ステージ装置及び露光装置 | |
| TWI621924B (zh) | Euv成像裝置 | |
| JP2006140366A (ja) | 投影光学系及び露光装置 | |
| US10520838B2 (en) | Mounting arrangement for an optical imaging arrangement | |
| JP2002162549A (ja) | 光学素子保持装置、鏡筒及び露光装置並びにマイクロデバイスの製造方法 | |
| JPWO2005048325A1 (ja) | ステージ駆動方法及びステージ装置並びに露光装置 | |
| JP2011119551A (ja) | 光学部材変形装置、光学系、露光装置、デバイスの製造方法 | |
| US20210389681A1 (en) | Actuator device and method for aligning an optical element, optical assembly and projection exposure apparatus | |
| US11320749B2 (en) | Actuator device for aligning an element, projection exposure apparatus for semiconductor lithography, and method for aligning an element | |
| US7986471B2 (en) | Optical element supporting device, lens barrel, exposure apparatus, and device manufacturing method | |
| KR102230068B1 (ko) | 마이크로리소그래피 투영 노광 장치의 조립체 | |
| JP2008166614A (ja) | 移動体装置、露光装置、計測方法及び露光方法、並びにデバイス製造方法 | |
| JP2013051239A (ja) | 部材の支持構造、露光装置、フラットパネルディスプレイの製造方法、及びデバイス製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131121 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131203 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20140303 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20140306 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140603 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141111 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20150205 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150507 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150630 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150713 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5779545 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |