CN1138651C - 混合动力车辆的控制装置 - Google Patents
混合动力车辆的控制装置 Download PDFInfo
- Publication number
- CN1138651C CN1138651C CNB00135308XA CN00135308A CN1138651C CN 1138651 C CN1138651 C CN 1138651C CN B00135308X A CNB00135308X A CN B00135308XA CN 00135308 A CN00135308 A CN 00135308A CN 1138651 C CN1138651 C CN 1138651C
- Authority
- CN
- China
- Prior art keywords
- auxiliary
- remaining capacity
- motor
- correction
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000003860 storage Methods 0.000 claims description 224
- 230000008859 change Effects 0.000 claims description 19
- 230000001172 regenerating effect Effects 0.000 claims description 9
- 230000001141 propulsive effect Effects 0.000 claims description 8
- 238000007600 charging Methods 0.000 abstract description 10
- 230000007423 decrease Effects 0.000 abstract description 2
- 238000010586 diagram Methods 0.000 description 71
- 238000006467 substitution reaction Methods 0.000 description 56
- 230000014509 gene expression Effects 0.000 description 15
- 238000010248 power generation Methods 0.000 description 14
- 230000009194 climbing Effects 0.000 description 10
- 238000011084 recovery Methods 0.000 description 10
- 239000000446 fuel Substances 0.000 description 9
- 238000000034 method Methods 0.000 description 9
- 230000008929 regeneration Effects 0.000 description 9
- 238000011069 regeneration method Methods 0.000 description 9
- 101001036145 Homo sapiens Serine/threonine-protein kinase greatwall Proteins 0.000 description 8
- 102100039278 Serine/threonine-protein kinase greatwall Human genes 0.000 description 8
- 238000010791 quenching Methods 0.000 description 8
- 230000000171 quenching effect Effects 0.000 description 8
- 238000006243 chemical reaction Methods 0.000 description 7
- 238000004146 energy storage Methods 0.000 description 7
- 239000000203 mixture Substances 0.000 description 7
- 230000008569 process Effects 0.000 description 7
- 230000033228 biological regulation Effects 0.000 description 6
- 230000009467 reduction Effects 0.000 description 5
- 230000000630 rising effect Effects 0.000 description 4
- 230000000153 supplemental effect Effects 0.000 description 4
- 239000000654 additive Substances 0.000 description 3
- 230000000996 additive effect Effects 0.000 description 3
- 238000007599 discharging Methods 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 238000002485 combustion reaction Methods 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 230000007935 neutral effect Effects 0.000 description 2
- 238000009825 accumulation Methods 0.000 description 1
- 230000000712 assembly Effects 0.000 description 1
- 238000000429 assembly Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000002950 deficient Effects 0.000 description 1
- 230000004069 differentiation Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000014759 maintenance of location Effects 0.000 description 1
- 230000007115 recruitment Effects 0.000 description 1
- 239000007858 starting material Substances 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images


















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/48—Parallel type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/48—Parallel type
- B60K6/485—Motor-assist type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
- B60L15/2045—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed for optimising the use of energy
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/10—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines
- B60L50/16—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines with provision for separate direct mechanical propulsion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/12—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries responding to state of charge [SoC]
- B60L58/14—Preventing excessive discharging
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/12—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries responding to state of charge [SoC]
- B60L58/15—Preventing overcharging
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L7/00—Electrodynamic brake systems for vehicles in general
- B60L7/10—Dynamic electric regenerative braking
- B60L7/18—Controlling the braking effect
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/24—Conjoint control of vehicle sub-units of different type or different function including control of energy storage means
- B60W10/26—Conjoint control of vehicle sub-units of different type or different function including control of energy storage means for electrical energy, e.g. batteries or capacitors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/12—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/421—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/44—Drive Train control parameters related to combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/44—Drive Train control parameters related to combustion engines
- B60L2240/441—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/20—Drive modes; Transition between modes
- B60L2260/26—Transition between different drive modes
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Power Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
Abstract
本发明涉及混合动力车辆的控制装置,该装置在蓄电装置残存容量倾向于减少且初始残存容量减少了规定量时能够进行蓄电装置的充电,该装置设有用于对行驶开始时的蓄电池初始残存容量设定发电量下限阈值和上限阈值的下限阈值设定装置S060及上限阈值设定装置S061;在蓄电池残存容量减少至下限阈值时、改变马达控制以使蓄电池恢复的模式设定装置S054;模式设定解除装置S062,其在蓄电池残存容量残存容量达到上限阈值时,解除由模式设定装置改变的模式的设定;用于检查与蓄电池初始残存容量有关的当前残存容量放电量的放电深度检测装置。根据放电深度,改变用于判定可否由马达进行发动机驱动辅助的阈值。
Description
本发明涉及用发动机和马达驱动的混合动力车辆的控制装置,特别是涉及能使行驶状态下的充放电平衡恢复的混合动力车辆的控制装置,在行驶状态下由于驱动马达蓄电装置的充放电平衡易成为放电过多状态。
以往,已知作为车辆行驶用的动力源,除发动机外,还设有马达的混合动力车辆。混合动力车辆有串列式混合动力车与并列式混合动力车。串列式混合动力车辆是利用由发动机驱动的发电机的发电输出来驱动马达,由马达来驱动车轮的车辆。
因此,由于发动机与车轮不是机械连结的,发动机可以在高燃油经济性、低排放的转速区域大致以一定的转速运转,从而实现比以往的发动机车辆更好的燃油经济性及低排放量。
与此相比,并列式混合动力车辆通过连结于发动机上的马达来辅助驱动发动机的驱动轴,同时使用另外设置的发电机或将上述马达作为发电机使用来给蓄电装置充电。
因此,尽管发动机与车轮是机械连结的,但因为能减轻发动机的负荷,同样能实现比以往的发动机车辆更好的燃油经济性以及低的排放量。
在上述并列式混合动力车辆中,存在辅助驱动发动机输出的马达直接连结到发动机的输出轴上,该马达在减速时等起到发电机的功能,对蓄电池等蓄电的类型;及以能用发动机与马达之任一或者两者产生驱动力而另外备有发电机的类型等。
在这样的混合动力车辆中,进行例如加速时,由马达来辅助发动机,减速时由减速再生对蓄电池等进行充电等各种控制,确保蓄电池的电能(下称残存容量),以满足驾驶员的要求。例如,由于在高速行驶后能获得大的减速再生,因此蓄电池在减速时能够回收所消耗的一部分能量,在山路等的上坡路上行驶后,可通过此后在下坡路行驶时的减速再生给蓄电池充电(例如日本特开平7-123509号公报中所示的)。
但是,上述以往的混合动力车辆例如在减速后立即加速等,不能充分确保减速再生的状况下运转时,由于不能取得再生,因此在继续行驶中蓄电池等的残存容量不是增加而是减少了。而且,在山路的上坡路上行驶后,必需继续在平坦路面上行驶的场合,存在若没有在下坡路上的行驶,就不能恢复在上坡行驶中所使用的超额的蓄电池残存容量的问题。
本发明的目的是提供一种混合动力车辆的控制装置,其在上述蓄电装置的残存容量具有减少的倾向、当从初始读数减少了规定量的情况下对蓄电装置进行充电。
为达到上述目的,本发明的第一控制装置是用于混合动力车辆的控制装置,其中该混合动力车辆包括:输出车辆的推进力的发动机(例如实施例中的发动机E);产生辅助该发动机输出的辅助驱动力的马达(例如实施例中的马达M);向马达供给电力或对车辆减速时马达的再生操作而获得的再生能量进行蓄电的蓄电装置(例如实施例中的蓄电池3);对应于前述车辆的运行状态来判断可否由前述马达来辅助发动机的输出的辅助判断单元(例如实施例中的步骤S005);辅助量设定单元(例如实施例中的步骤S209、S211、S216),用于在由前述辅助判断单元判断为由马达辅助发动机输出的情况下,对应于前述发动机的运行状态来设定前述马达的辅助量(例如实施例中的最终辅助指令值ASTPWRF);根据由该辅助量设定单元设定的辅助量,对由前述马达进行的辅助前述发动机的输出进行控制的辅助控制单元(例如实施例中的马达ECU1);其特征在于还包括检测车辆行驶开始的行驶开始检测单元(例如实施例中的步骤S050);计算出蓄电装置的残存容量(例如实施例中的残存容量SOC)的残存容量检测单元(例如实施例中的蓄电池ECU31);放电深度检测单元(例如实施例的蓄电池ECU31,用于相对于检测出行驶开始时的蓄电装置的初始残存容量(例如实施例的步骤S057中蓄电池残存容量的初始值SOCINT),来检测当前残存容量的放电量(例如实施例的步骤S063中的放电深度DOD);相对于前述初始残存容量设定放电量的下限阈值(例如实施例中步骤S060的下限阈值SOCLMTL)的下限阈值设定单元(例如实施例中的步骤S060);相对于前述初始残存容量来设定放电量上限阈值(例如实施例中步骤S061的上限阈值SOCLMTH)的上限阈值设定单元(例如实施例中的步骤S061);在蓄电装置的残存容量减少到上述下限阈值时变更前述马达控制的模式设定单元(例如实施例中的步骤S054);在蓄电装置的残存容量达到上述上限阈值的情况下,解除通过前述模式设定单元变更的马达控制模式的设定的模式设定解除单元(例如实施例中的步骤S062);判断阈值修正单元(例如实施例中的具有步骤S152的步骤S103、具有步骤S162的步骤S111、具有步骤S172的步骤S123),用于在由前述模式设定单元改变马达的控制时,根据由前述放电深度检测单元检测出的放电深度,修正作为由前述辅助判断单元进行判断的基准的辅助发动机输出的判断阈值(例如实施例中的油门辅助触发阈值MAST、吸气管辅助触发阈值MTHAST、吸气管辅助触发阈值MASTTH)。
采用该结构,例如由于在反复紧急加速和减速而不能获得再生行驶时,或者在上坡行驶后而在平坦路面上行驶等时,通过再生不能恢复上坡行驶时减少的蓄电装置的残存容量的情况下,蓄电装置的残存容量具有放电的倾向,由于通过检测出行驶开始时蓄电装置中残存容量相对于初始残存容量减少了规定的量这一情况而能够使蓄电装置的残存容量变成恢复的方向,从而能恢复充放电平衡。
此外,在使蓄电装置的残存容量变成恢复方向的情况下,由于能够根据放电深度、通过判断阈值修正单元来提高前述判断阈值,减少马达对发动机的辅助的频率,并抑制了蓄电装置中残存容量的减少,因此在蓄电装置中残存容量小的情况下,也可以迅速进行残存容量的恢复。
由前述判断阈值修正单元修正的判断阈值也可根据车速(例如实施例中的控制用车速VP)来进行修正。(例如,实施例的步骤S103中的步骤S154、步骤S111中的步骤S164、步骤S123中的步骤S174)。
在这种情况下,即使在因阻滞(塞车)等低车速时,由于反复起步停止而不能充分确保再生的场合下,通过根据车速及放电深度来提高判断阈值,可以降低辅助频率以使蓄电装置的残存容量进一步向恢复方向修正。
替换前述判断阈值修正单元,也可设置辅助量变更单元(例如实施例中的步骤S219)或者巡航(正常经济行驶)发电量变更单元(例如实施例中的步骤S307A),其中辅助量变更单元用于修正由马达进行的发动机的驱动辅助量,巡航发电量变更单元用于修正巡航行驶时对蓄电装置的充电量(例如实施例中的巡航发电量CRSRGN)。
此时,通过辅助量变更单元来减少地设定辅助量,或者通过巡航发电量变更单元来增大地设定巡航发电量,可以迅速恢复蓄电装置的残存容量。
本发明的第二控制装置是用于混合动力车辆的控制装置,其中混合动力车辆包括:输出车辆的推进力的发动机(例如,实施例中的发动机E);产生辅助该发动机输出的辅助驱动力的马达(例如,实施例中的马达M);向马达供给电力或对在车辆减速时通过马达的再生操作而获得的再生能量进行蓄电的蓄电装置(例如,实施例中的蓄电池3);根据前述车辆的运行状态来判断可否由前述马达来辅助发动机的输出的辅助判断单元(例如,实施例中的步骤S522、S535);其特征是还包括检测车辆的行驶开始的行驶开始检测单元(例如,实施例中的步骤S450);计算出蓄电装置的残存容量(例如,实施例中的残存容量SOC)的残存容量检测单元(例如,实施例中的蓄电池ECU31);相对于在检测出行驶开始时的蓄电装置的初始残存容量(例如,实施例的步骤S457中蓄电池残存容量的初始值SOCINT),来检测出当前残存容量的放电量(例如,实施例的步骤S463中的放电深度DOD)的放电深度检测单元(例如,实施例的蓄电池ECU31);相对于前述初始残存容量来设定放电量的下限阈值(例如,实施例中步骤S460的下限阈值SOCLMTL)的下限阈值设定单元(例如,实施例中的步骤S460);相对于前述初始残存容量来设定放电量的上限阈值(例如,实施例中步骤S461的上限阈值SOCLMTH)的上限阈值设定单元(例如,实施例中的步骤S461);在蓄电装置的残存容量减少到上述下限阈值时改变前述马达的控制的模式设定单元(例如,实施例中的步骤S454);在蓄电装置的残存容量达到上述上限阈值的情况下,解除通过前述模式设定单元变更的马达控制模式的设定的模式设定解除单元(例如,实施例中的步骤S462);判断阈值修正单元(例如,实施例中的步骤S503、S511、S523),用于在由前述模式设定单元改变马达的控制时,根据由前述放电深度检测单元检测出的放电深度,对作为由前述辅助判断单元判断的基准的辅助发动机输出的判断阈值(例如,实施例中的油门辅助触发阈值MAST、吸气管辅助触发阈值MTHAST、吸气管辅助触发阈值MASTTH)进行修正;进一步根据前述蓄电装置的初始残存容量,对由该判断阈值修正单元进行修正的判断阈值进行修正的判断阈值残存容量修正单元(例如,实施例的步骤S560、S607、S657)。
采用该结构,例如当由于反复紧急加速与减速而不能获得再生行驶时,或者在上坡行驶后在平坦路面上行驶等时,通过再生不能恢复上坡行驶时减少的蓄电装置的残存容量的情况下,通过检测出蓄电装置的残存容量减少了规定量这一情况,可以使得蓄电装置的残存容量变成恢复的方向。此外,在使蓄电装置的残存容量变成恢复方向的情况下,由于根据放电深度由判断阈值修正单元来提高前述判断阈值,并减少马达对发动机的辅助频率,可以抑制蓄电装置中残存容量的减少。
另外,由上述判断阈值修正单元设定的判断阈值进一步可对应于蓄电装置的前述初始残存容量、由判断阈值残存容量修正单元来修正,例如蓄电装置的初始残存容量越多,则可以使辅助的频率越高。
也可以是若蓄电装置的初始残存容量越多,则上述判断阈值残存容量修正单元使判断阈值的修正量越小。
此时,在蓄电装置的初始残存容量多时,与在蓄电装置的初始残存容量少的情况相比,能够减少判断阈值的提高量。
图1是混合动力车辆的整体结构图。
图2是表示马达操作模式判断的流程图。
图3是表示马达操作模式判断的流程图。
图4是放电深度限制判断的流程图。
图5是表示放电深度限制控制模式中的SOC的曲线图。
图6是辅助触发判断的流程图。
图7是辅助触发判断的流程图。
图8是表示TH辅助模式与PB辅助模式的阈值的曲线图。
图9是PB辅助模式中MT车的阈值的曲线图。
图10是用于求解步骤S119与步骤S131的数值的计算的曲线图。
图11是步骤S120与步骤S132的计算的曲线图。
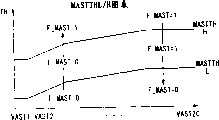
图12是PB辅助模式中CVT车的阈值的曲线图。
图13是TH辅助触发修正的流程图。
图14是大气压修正图表的曲线图。
图15是放电深度限制控制的修正图表的曲线图。
图16是表示油门辅助触发DOD修正量车速修正系数与控制用车速间关系的曲线图。
图17是PB辅助触发修正(MT车)的流程图。
图18是大气压修正图表的曲线图。
图19是放电深度限制控制的修正图表的曲线图。
图20是表示油门辅助触发DOD修正量车速修正系数与控制用车速之间的关系的曲线图。
图21是PB辅助触发修正(CVT车)的流程图。
图22是大气压修正图表的曲线图。
图23是放电深度限制控制的修正图表的曲线图。
图24是第二实施例的加速模式的流程图。
图25是第二实施例的加速模式的流程图。
图26是求解第二实施例的辅助量的上限值的曲线图。
图27是求解第二实施例的最终辅助指令值的DOD修正系数的曲线图。
图28是第三实施例中巡航模式的流程图。
图29计算第三实施例中巡航发电量的流程图。
图30是计算第三实施例中巡航发电量的流程图。
图31是求出巡航发电量系数#KCRGNDOD的曲线图。
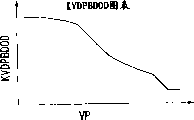
图32是求出巡航发电量减算系数KVCRSRG的曲线图。
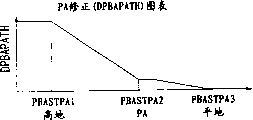
图33是求出巡航发电量PA修正系数KPACRSRN的曲线图。
图34是放电深度限制判断的流程图。
图35是表示放电深度限制控制模式中的SOC的曲线图。
图36是判断辅助触发的流程图。
图37是判断辅助触发的流程图。
图38是表示TH辅助模式与PB辅助模式的阈值的曲线图。
图39是PB辅助模式中MT车的阈值的曲线图。
图40是求解步骤S519与步骤S531的数值的曲线图。
图41是计算出步骤S520与步骤S532的曲线图。
图42是PB辅助模式中CVT车的阈值的曲线图。
图43是表示TH辅助触发上限的曲线图。
图44是TH辅助触发修正的流程图。
图45是根据放电深度限制控制的DOD的修正图表的曲线图。
图46是根据蓄电池初始残存容量的修正系数的曲线图。
图47是根据控制用车速的修正系数的曲线图。
图48是根据控制用车速的修正系数的曲线图。
图49是PB辅助触发修正(MT车)的流程图。
图50是放电深度限制控制的修正图表的曲线图。
图51是根据蓄电池初始残存容量的修正系数的曲线图。
图52是根据控制用车速的修正系数的曲线图。
图53是根据控制用车速的修正系数的曲线图。
图54是设定大电流判断标志的流程图。
图55是PB辅助触发修正(CVT车)的流程图。
图56是放电深度限制控制的修正图表的曲线图。
下面结合附图说明本发明的实施例。
图1表示适用于并列式混合动力车辆中的实施例,发动机E及马达M两者的驱动力通过由自动变速装置或手动变速装置构成的变速器T传递到作为驱动轮的前轮Wf,Wf上。而且,在混合动力车辆减速时,从前轮Wf,Wf侧向马达M侧传递驱动力,马达M作为发电机的功能而产生所谓再生制动力,将车体的运动能量作为电能回收。
马达M的驱动及再生操作是通过从马达ECU 1接收控制指令由动力驱动单元2进行的。在动力驱动单元2上连接有马达M与接收电能的高压类的蓄电池3,蓄电池3例如可以采用将多个原电池串联连接的组件作为1个单位,再将多个组件串联连接的方式。在混合动力车辆中装载用于驱动各种附件的12伏特辅助电池4,该辅助电池4通过降压器5连接到蓄电池3上。由FIECU 11控制的降压器5降低蓄电池3的电压,对辅助电池4充电。
FIECU 11除了对前述马达ECU 1及前述降压器5,控制发动机E的燃料供给量的燃料供给量控制单元6的操作以及启动马达7的操作进行控制外,还进行点火时间等的控制。为此,向FIECU 11输入下列各种信号:来自根据变速器的驱动轴的转速检测出车速V的车速传感器S1的信号;来自检测发动机转速NE的发动机转速传感器S2的信号;来自检测变速器T的换档位置的换档位置传感器S3的信号;来自检测制动器踏板8的操作的制动器开关S4的信号;来自检测离合器踏板9的操作的离合器开关S5的信号;来自检测油门开度TH的油门开度传感器S6的信号;来自检测吸气管负压PB的吸气管负压传感器S7的信号。图1中,21表示CVT控制用的CVTECU,31表示保护蓄电池3、计算出蓄电池3残存容量SOC的蓄电池ECU。
该混合动力车辆的控制模式具有“怠速停止模式”、“怠速模式”、“减速模式”、“加速模式”及“巡航模式”等各种模式。在怠速模式下,以切断燃料后再供给燃料的方式使发动机E保持怠速状态;在怠速停止模式下,例如在车辆停止时等一定条件下停止发动机。此外,在减速模式下,由马达M进行再生制动;在加速模式下,由马达来辅助驱动发动机;在巡航模式下,不驱动马达,车辆通过发动机E的驱动力行驶。
(马达操作模式判断)
根据图2、图3的流程图来说明确定前述各模式的马达操作模式的判断。
在步骤S001中,判断MT/CVT判断标志F_AT的标志值是否为“1”。当判断结果为“否”时,即在判断为MT车辆的情况下进入步骤S002。当步骤S001中的判断结果为“是”时,即在判断为CVT车辆的情况下进入步骤S010,在此判断CVT车辆用的啮合判断标志F_ATNP的标志值是否为“1”。当步骤S010中的判断结果为“否”时,即在判断为啮合的情况下,在步骤S010A中根据转换标志F_VSWB的状态,判断是否处于转换中(变速杆在操作中)。当步骤S010A中的判断结果为“否”时,即在未处于转换中的情况下,进入步骤S004中。当步骤S010A中的判断结果为“是”时,即在处于转换中的情况下,就转入步骤S022的“怠速模式”,结束控制。在怠速模式下,燃料切断之后再开始燃料供给,发动机E保持怠速状态。
而且,当步骤S010中的判断结果为“是”时,即在判断为N、P范围的情况下,进入步骤S014中,判断发动机停止控制实施标志F_FCMG的标志值是否为“1”。当步骤S014中判断结果为“否”时,进入步骤S022中。
在步骤S014中判断结果为“是”的情况下,进入步骤S023中,转入“怠速停止模式”,结束控制。在怠速停止模式下,例如在车辆停止时等一定的条件下,发动机停止。
在步骤S002中,判断空档位置判断标志F_NSW的标志值是否为“1”。当步骤S002中的判断结果为“是”时,即在判断为空档位置的情况下,进入步骤S014中。当步骤S002中的判断结果为“否”时,即在判断为啮合的情况下,进入步骤S003中,在此判断离合器接合判断标志F_CLSW的标志值是否为“1”。当判断结果为“是”即离合器判断为“断开”时,进入步骤S014中。当在步骤S003中判断结果为“否”即离合器判断为“接合”时,进入步骤S004中。
在步骤S004中,判断IDLE判断标志F_THIDLMG的标志值是否为“1”。当判断结果为“否”时,即在判断为油门全闭的情况下,进入步骤S011中。当步骤S004中的判断结果为“是”时,即在判断为油门非全闭的情况下,进入步骤S005中,判断马达辅助辅助判断标志F_MAST的标志值是否为“1”。
当步骤S005中的判断结果为“否”时,进入步骤S011中。当步骤S005中的判断结果为“是”时,进入步骤S006中。
在步骤S011中,判断MT/CVT判断标志F_AT的标志值是否为“1”。当判断结果为“否”时,即在判断为MT车的情况下,进入步骤S013中。当步骤S011中的判断结果为“是”时,即在判断为CVT车的情况下,进入步骤S012中,在此判断倒档位置判断标志F_ATPR的标志值是否为“1”。当判断结果为“是”时,即在判断为倒档位置的情况下,进入步骤S022中。当判断结果为“否”时,即在判断为不是倒档位置的情况下,进入步骤S013中。
在步骤S006中,判断MT/CVT判断标志F_AT的标志值是否为“1”。当判断结果为“否”时,即在判断为MT车的情况下,在步骤S008中判断最终充电指令值REGENF是否在“0”以下,当判断为“0”以下时进入步骤S009的“加速模式”中,并结束。当步骤S008中判断最终充电指令值REGENF大于“0”时,就结束控制。
当步骤S006中判断结果为“是”时,即在判断为CVT车的情况下,进入步骤S007中,在此判断制动器ON判断标志F_BKSW的标志值是否为“1”。当步骤S007中的判断结果为“是”时,即在判断为踏下制动器的情况下,进入步骤S013中。当步骤S007中的判断结果为“否”时,即在判断为未踏下制动器的情况下,进入步骤S008中。
在步骤S013中,判断发动机控制用车速VP是否为“0”。判断结果为“是”时,即在判断车速为0的情况下,进入步骤S014中。当步骤S013中的判断结果为“否”时,即在判断车速不为0的情况下,进入步骤S015中。在步骤S015中,判断发动机停止控制实施标志F_FCMG的标志值是否为“1”。当步骤S015中的判断结果为“否”时,就进入步骤S016中。当步骤S015中的标志值判断为“1”时,就进入步骤S023中。
在步骤S016中,比较发动机转速NE与巡航/减速模式下限发动机转速#NERGNLx。这里巡航/减速模式下限发动机转速#NERGNLx中“x″为各齿轮中设定的值(包括滞后现象)。
当步骤S016中的判断结果为发动机转速NE≤巡航/减速模式下限发动机转速#NERGNLx,即判断为低转速侧时,进入步骤S014中。另一方面,当步骤S016中的判断结果为发动机转速NE>巡航/减速模式下限发动机转速#NERGNLx,即判断为高转速侧时,进入步骤S017中。在步骤S017中,判断制动器ON判断标志F_BKSW的标志值是否为“1”。当步骤S017中判断结果为“是”时,即在判断为踏下制动器的情况下,进入步骤S018中。当步骤S017中的判断结果为“否”时,即在判断为未踏下制动器的情况下,进入步骤S019中。
在步骤S018中,判断IDLE判断标志F_THIDLMG的标志值是否为“1”。当判断结果为“否”时,即在判断为油门全闭的情况下,进入步骤S024的“减速模式”中,结束控制。在减速模式下实施由马达M进行的再生制动。当步骤S018中的判断结果为“是”时,即在判断为油门未全闭的情况下,进入步骤S019中。
在步骤S019中,判断燃油切断实行标志F_FC的标志值是否为“1”。当判断结果为“是”时,即在判断为处于燃油切断的情况下,进入步骤S024中。当步骤S019中的判断结果为“否”时,进入步骤S020,进行最终辅助指令值ASTPWRF的减算处理,而且在步骤S021中判断最终辅助指令值ASTPWRF是否在“0”以下,当判断为“0”以下时,转入步骤S025的“巡航模式”中。在该巡航模式下,不驱动马达M,车辆由发动机的驱动力行驶。当在步骤S021中判断最终辅助指令值ASTPWRF大于“0”时,结束控制。
<蓄电池残存容量SOC的分区>
下面,就蓄电池残存容量SOC的分区(即所谓的残存容量的区域划分)进行说明。蓄电池残存容量的计算是在蓄电池ECU 31中进行的,例如通过电压、放电电流、温度等来计算。
如说明其一个例子,则以作为正常使用区域的区域A(从SOC40%~SOC80%乃至90%)为标准,划分成其以下的作为暂定使用区域的区域B(SOC20%~SOC40%)以及更低的作为过放电区域的区域C(从SOC0%~SOC20%)。区域A以上被设定成作为过充电区域的区域D(从SOC80%乃至90%~100%)。
各区域中蓄电池残存容量SOC的检测,在区域A、B中是通过电流值的累积计算来进行,在区域C、D是通过检测出蓄电池的特性电压值等来进行的。
在各区域的边界处使其持有上限与下限的阈值,而且所述阈值在蓄电池残存容量SOC增加与减少时不同地设定滞后量。
“放电深度限制判断”
图4是进行放电深度限制判断的流程图。
在步骤S050中,判断起动开关判断标志F_STS的标志值是否为“1”,即判断是否为最初行驶中的起动时间。当判断结果为“1”时,即在判断为最初行驶的情况下进入步骤S057,在此读入行驶开始时的蓄电池残存容量SOC的初始值SOCINT。接着,在步骤S058中判断蓄电池残存容量SOC的初始值SOCINT是否小于放电深度限制初始下限值#SOCINTL。上述放电深度限制初始下限值#SOCINTL例如为50%。
在步骤S058中的判断结果为“是”时,即在判断为蓄电池残存容量SOC的初始值SOCINT<放电深度限制初始下限值#SOCINTL的情况(低容量的情况)下进入步骤S059,在此用放电深度限制初始下限值#SOCINTL代入蓄电池残存容量SOC的初始值并进入步骤S060中。总之,在上述放电深度限制初始下限值#SOCINTCVT为例如50%的情况下,当蓄电池残存容量SOC低于50%时,将50%来代入蓄电池残存容量SOC的初始值。
当步骤S058中的判断结果为“否”时,即在判断为蓄电池残存容量SOC的初始值SOCINT≥放电深度限制初始下限值#SOCINTL的情况(高容量的情况)下也进入步骤S060中。
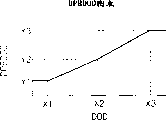
在步骤S060中,根据蓄电池残存容量SOC的初始值SOCINT来设定下限阈值SOCLMTL,然后在步骤S061中设定上限阈值SOCLMTH(参照图5)。确定下限阈值SOCLMTL的放电深度限制值#DODLMT取决于蓄电池3的各性质,例如蓄电池残存容量SOC为10%的程度;用于确定上限阈值SOCLMTH的放电深度限制值解除SOC上升值#SOCUP例如蓄电池残存容量SOC为5%的程度。
因此,例如当蓄电池残存容量SOC的初始值SOCINT为55%时,下限阈值SOCLMTL为45%,上限阈值SOCLMTH为60%。此外,在蓄电池残存容量SOC的初始值为40%的情况下,由于在步骤S059中,例如将50%代入蓄电池残存容量SOC的初始值,因此下限阈值SOCLMTL变为40%,上限阈值SOCLMTH变为55%。
这样,当蓄电池残存容量SOC的初始值在放电深度限制初始下限值#SOCINT以下时,将放电深度限制初始下限值#SOCINTL代入蓄电池残存容量SOC的初始值,通过升高初始值来减小至下限阈值SOCLMTL的深度。因此,当起动时蓄电池残存容量SOC较少,即在放电深度限制初始下限值#SOCINTL以下时,缩短进入到放电深度限制控制的时间,而且根据蓄电池残存容量SOC的初始值在起动的同时进入放电深度限制控制,能迅速恢复蓄电池的残存容量SOC。
接着,在步骤S062中,将上次的DOD限制判断标志F_DODLMT设置为“0”,解除上次的放电深度限制控制模式的设定。进入步骤S063中。在步骤S063,求出表示蓄电池残存容量的当前值SOC由初始值SOCINT放电了多少的放电深度DOD,结束控制。即,无论DOD限制判断标志F_DODLMT的标志值如何,均求出该放电深度DOD。
当开始行驶时在步骤S050中,判断起动开关判断标志F_STS为“0”时,就在步骤S051中判断能量储存区域D的判断标志是否为“1”,当判断结果为“否”,即在区域D以外的情况下时进入步骤S052中。当步骤S051中判断结果为“是”、即在区域D的情况下进入步骤S062中。接着在步骤S052中判断当前的蓄电池残存容量SOC是否大于放电深度限制实施上限值SOCUPH。当判断结果为“是”、即在判断为当前的蓄电池残存容量SOC>放电深度限制实施上限值SOCUPH的情况下(高容量情况),进入步骤S056中。当步骤S052的判断结果为“否”、即在判断为当前的蓄电池残存容量SOC≤放电深度限制实施上限值SOCUPH的情况下(低容量情况),进入步骤S053中。上述放电深度限制实施上限值SOCUPH例如被设定为70%。
接着在步骤S053中判断蓄电池残存容量SOC是否小于前述下限阈值SOCLMTL。当判断结果为“是”、即当判断为蓄电池残存容量SOC<下限阈值SOCLMTL的情况下(低容量情况),在步骤S054中将DOD限制判断标志F_DODLMT设置为“1”,随后设定放电深度限制控制模式,进入步骤S063中。这样,在马达操作模式判断中的后述的相关模式等、具体为辅助触发判断中,以及在第二、三实施例中,进行根据该DOD限制判断标志F_DODLMT的状态的控制。
当进入放电深度限制控制模式时,如图5所示,进行使蓄电池残存容量SOC增大的发电,但是当在步骤S053中判断为蓄电池残存容量SOC≥下限阈值SOCLMTL、即蓄电池残存容量SOC在下限阈值SOCLMTL以上的情况(高容量情况)下,在步骤S055中判断DOD限制判断标志F_DODLMT的状态。
当步骤S055中的判断结果为“是”、即判断为设定成放电深度限制控制模式的情况下,在步骤S056中判断是否蓄电池残存容量SOC>上限阈值SOCLMTH,即蓄电池残存容量SOC是否比上限阈值SOCLMTH大。当步骤S056中判断蓄电池残存容量SOC>上限阈值SOCLMTH,即蓄电池残存容量SOC比上限阈值SOCLMTH大时(高容量情况),进入步骤S057中,在此更新蓄电池残存容量SOC的初始值SOCINT以及与其对应的上限阈值SOCLMTH、下限阈值SOCLMTL。基于该更新的蓄电池残存容量SOC的增加,一直继续到在步骤S051中蓄电池残存容量SOC到达D区域为止。因此,蓄电池残存容量SOC得以迅速恢复,同时可以防止超过需要的充电。
在步骤S055中,当判断DOD限制判断标志F_DODLMT的标志值为“0”,即为放电深度限制控制模式的设定被解除的情况下,或者在步骤S056中判断为蓄电池残存容量SOC≤上限阈值SOCLMTH,即蓄电池残存容量SOC在上限阈值SOCLMTH以下的情况(低容量情况)下,进入步骤S063。
下面说明所述放电深度限制控制模式的具体内容。上述放电深度限制控制模式由于与后述的“辅助触发判断”有关,因此其内容在下面进行说明。
“辅助触发判断”
图6、7是辅助触发判断的流程图,具体地说是根据区域来判断辅助/巡航模式的流程图。
在步骤S100中判断能量储存区域C的标志F_ESZONEC的标志值是否为“1”。当判断结果为“是”、即判断为蓄电池残存容量SOC为C区域的情况下,在步骤S136中判断最终辅助指令值ASTPWRF是否在0以下。当步骤S137中的判断结果为“是”、即判断为最终辅助指令值ASTPWRF在0以下的情况下,在步骤S137中将1.0代入巡航发电量减算系数KTRGRGN,在步骤S122中将“0”代入马达辅助判断标志F_MAST,并返回。
在步骤S100及步骤S136中的判断结果为“否”的情况下,在步骤S101中进行起步辅助触发判断。该起步辅助触发的判断处理的目的是为提高起步性能,是在吸气管负压PB为大于规定压力的高负压的起步时,为了与通常的辅助量不同地计算辅助触发量和辅助量的处理,在判断为有必要进行起步辅助控制的情况下,该处理结果将起步辅助要求标志F_MASTSTR设定为“1”。接着,在步骤S102中进行攀爬辅助触发判断。该攀爬辅助触发判断处理是在加速时,通过一时增大辅助量而进行提高加速感的判断,基本上是当油门的变化量大时,将“1”代入攀爬辅助要求标志F_MASTSCR。
接着在步骤S103中进行油门辅助触发修正值DTHAST的计算处理。其处理内容如后所述。
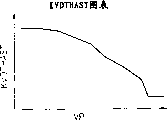
接着,在步骤S104中,从油门辅助触发图表中检索作为油门辅助触发基准的阈值MTHASTN。如图8中的实线所示,由于该油门辅助触发图表是对应于发动机转速NE,确定作为是否进行马达辅助驱动判断基准的油门开度的阈值MTHASTN的,因此根据发动机转速NE来设定阈值。
接着在步骤S105、步骤S106中,在前一步骤S104求出的油门辅助触发的基准阈值MTHASTN上增加在前述步骤S103中算出的修正值DTHAST,求出高油门辅助触发阈值MTHASTH,同时由该高油门辅助触发阈值MTHASTH减去用于设定滞后量的差值#DMTHAST,求出低油门辅助触发阈值MTHASTL。该高、低油门辅助触发阈值用图8中的虚线表示,其与图8中的油门辅助触发基准阈值MTHASTN一起记载。
在步骤S107中,判断油门开度的当前值THEM是否大于在步骤S105、步骤S106中求出的油门辅助触发阈值MTHAST。此时的油门辅助触发阈值MTHAST为保持前述滞后量的值,在油门开度为增大方向的情况下,参照高油门辅助触发阈值MTHASTH,而在油门开度为变小方向的情况下,参照低油门辅助触发阈值MTHASTL。
当该步骤S107中的判断结果为“是”时,即判断为油门开度的当前值THEM大于油门辅助触发阈值MTHAST(设定了高低滞后量的阈值)的情况下,进入步骤S109中;而当判断结果为“否”时,即判断为油门开度的当前值THEM不大于油门辅助触发阈值MTHAST(设定了高低滞后量的阈值)的情况下,进入步骤S108中。
在步骤S109中,将油门马达辅助判断标志F_MASTTH设定为“1”,而在步骤S108中,将油门马达辅助判断标志F_MASTTH设定为“0”。
至此的处理是进行油门开度TH是否为要求马达辅助的开度的判断,在步骤S107中,当判断油门开度的当前值THEM在油门辅助触发阈值MTHAST以上的情况下,将油门马达辅助判断标志F_MASTTH设定为“1”,通过在前述“加速模式”中读入该标志判断出要求进行马达辅助。
另一方面,当在步骤S108中将油门马达辅助判断标志F_MASTTH设定为“0”时,其表示不在由油门开度造成的马达辅助判断的区域。在该实施例中,辅助触发的判断是用油门开度TH与发动机的吸气管负压PB两者来判断的,当油门开度的当前值THEM在前述油门辅助触发阈值MTHAST以上的情况下时,根据油门开度TH来进行辅助判断,而在未超过该阈值的区域中,是根据后述吸气管负压PB来进行判断的。在步骤S109中,将油门马达辅助判断标志F_MASTTH设定为“1”后,应脱离通常的辅助判断进入步骤S134,将巡航发电量的减算系数KTRGREN设定为“0”,接着在步骤S135中将马达辅助判断标志F_MAST设定为“1”。
另外,在步骤S110中判断MT/CVT判断标志F_AT的标志值是否为“1”。当判断结果为“否”、即在判断为MT车的情况下,进入步骤S111中。当步骤S110中的判断结果为“是”、即在判断为CVT车的情况下,进入步骤S123中。在步骤S111中进行吸气管负压辅助触发修正值DPBAST的计算处理。其处理内容如后所述。
接着在步骤S112中,从吸气管负压辅助触发图表中检索出吸气管负压辅助触发的阈值MASTL/H。如图9中的两条实线所述,该吸气管负压辅助触发图表是对应于发动机转速NE,确定了用于判断是否进行马达辅助的高吸气管负压辅助触发阈值MASTH与低吸气管负压辅助触发阈值MASTL的,因此在步骤S112的检索处理中,根据吸气管负压PB的增加或者根据发动机转速NE的减少而从下向上通过图9的高阈值线MASTH,将马达辅助判断标志F_MAST从“0”设定为“1”;相反,根据吸气管负压PB的减小或者发动机转速NE的增加而从上向下通过图9的低阈值线MASTL,将马达辅助判断标志F_MAST从“1”设定为“0”。图9中按每一档位及每一补充燃料/稀混合气进行更换。
接着在步骤S113中,判断马达辅助判断标志F_MAST的标志值是否为“1”,在判断结果为“1”的情况下进入步骤S114中,在判断结果不为“1”的情况下进入步骤S115中。在步骤S114中,将吸气管辅助触发阈值MAST作为由在步骤S112中检索出的吸气管负压辅助触发的低阈值MASTL与在步骤S111中算出的修正值DPBAST相加的值而计算出;在步骤S116中,判断吸气管负压的当前值PBA是否在步骤S114中求出的吸气管辅助触发阈值MAST以上。在判断结果为“是”的情况下,进入步骤S134中。在判断结果为“否”的情况下,进入步骤S117中。而且,在步骤S115中,将吸气管辅助触发阈值MAST作为由在步骤S112中检索出的吸气管负压辅助触发的高阈值MASTH与在步骤S111中算出的修正值DPBAST相加的值而计算出,进入步骤S116中。
在步骤S117中判断起步辅助要求标志F_MASTSTR是否为“1”,当判断结果为“是”时进入步骤S134中。当判断结果为“否”时进入步骤S118中。在步骤S118中判断攀爬辅助要求标志F_MASTSCR是否为“1”,当判断结果为“是”时进入步骤S134中。当判断结果为“否”时进入步骤S119中。
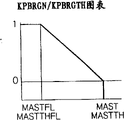
接着,在步骤S119中,如图10所示由上述吸气管负压辅助触发阈值MAST减去规定的吸气管负压的增量值#DCRSPB(例如100mmHg),由此求出最终吸气管负压辅助触发下限阈值MASTFL。接着,在步骤S120中,如图11所示用吸气管负压的当前值PBA插值计算出最终吸气管负压辅助触发下限阈值MASTFL与吸气管负压辅助阈值MAST,并求出巡航发电量减算系数图表值KPBRGN,在步骤S121中将巡航发电量减算系数图表值KPBRGN代入巡航发电量减算系数KTRGRGN。在步骤S122中将“0”代入马达辅助判断标志F_MAST,之后返回。
在上述步骤S110中,当MT/CVT判断标志F_AT的标志值的判断结果为“是”、即判断为CVT车的情况下,进入步骤S123中,在此进行吸气管负压辅助触发修正值DPBASTTH的计算处理。其处理内容如后所述。
接着,在步骤S124中,从吸气管负压辅助触发图表中检索出吸气管负压辅助触发的阈值MASTTHL/H。如图12的两条实线所示,该吸气管负压辅助触发图表是对应于发动机控制用车速VP,确定用于判断是否进行马达辅助的高吸气管负压辅助触发阈值MASTTHH与低吸气管负压辅助触发阈值MASTTHL的,步骤S124的检索处理随着油门开度TH的增加或者发动机控制用车速VP的减少而从下向上通过图12的高阈值线MASTTHH,将马达辅助判断标志F_MAST从“0”设定为“1”;相反,根据油门开度TH的减小或者根据发动机控制用速度VP的增加而从上向下通过图12的低阈值线MASTTHL,将马达辅助判断标志F_MAST从“1”设定为“0”。图12中每次补充燃料/稀混合气进行更换。
接着在步骤S125中,判断马达辅助判断标志F_MAST的标志值是否为“1”,当判断结果为“1”时进入步骤S126中,当判断结果不为“1”时进入步骤S127中。在步骤S126中,用在步骤S124中检索出的吸气管负压辅助触发的低阈值MASTTHL与在步骤S123中算出的修正值DPBASTTH相加的值来计算出吸气管辅助触发阈值MASTTH,在步骤S128中,判断油门开度的当前值是否在步骤S126中求出的吸气管辅助触发阈值MASTTH以上。当判断结果为“是”时进入步骤S134中。当判断结果为“否”时进入步骤S129中。
此外,在步骤S127中,用在步骤S124中检索出的吸气管负压辅助触发的高阈值MASTTHH与在步骤S123中算出的修正值DPBASTTH相加的值来计算出吸气管辅助触发阈值MASTTH,进入步骤S128中。
在步骤S129中判断起步辅助要求标志F_MASTSTR是否为“1”,当判断结果为“是”时进入步骤S134中。当判断结果为“否”时进入步骤S130中。在步骤S130中判断攀爬辅助要求标志F_MASTSCR是否为“1”,当判断结果为“是”时进入步骤S134中。当判断结果为“否”时进入步骤S131中。
接着,在步骤S131中,如图10所示由上述吸气管负压辅助触发阈值MASTTH减去规定的油门开度的增量值#DCRSTHV,由此求出最终吸气管负压辅助触发下限阈值MASTTHFL。接着,在步骤S132中,如图11所示用油门开度的当前值THEM插值计算出最终吸气管负压辅助触发下限阈值MASTTHFL与吸气管负压辅助阈值MASTTH,求出巡航发电量减算系数图表值KPBRGTH,在步骤S133中将巡航发电量减算系数图表值KPBRGTH代入巡航发电量减算系数KTRGRGN。在步骤S122中将“0”代入马达辅助判断标志F_MAST。
“TH辅助触发修正”
图13是前述步骤S103中油门辅助触发修正的流程图。
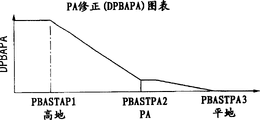
在步骤S150中根据大气压(PA)进行大气压修正值(DTHAPA)的检索。如图14所示,该修正是在油门辅助触发PA修正图表中检索出修正值,该修正值随着从高地到低地而逐步下降地设定。通过该图表检索来求出大气压修正值DTHAPA。
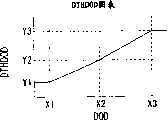
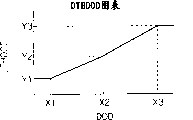
接着,在步骤S151中通过判断DOD限制判断标志F_DODLMT是否为“1”来判断对蓄电池的放电深度DOD是否进行限制处理。当处于放电深度限制控制模式中时,在步骤S152中根据图15由图表检索出DOD限制控制模式修正值#DTHDOD,将其代入DOD限制控制模式修正值DTHDOD。
另一方面,当在解除放电深度限制控制模式的情况下,进入接下来的步骤S153中,将“0”代入DOD限制控制模式修正值DTHDOD。
此时的规定值#DTHDOD被设定成用于提高马达辅助的判断值的正值,在放电深度限制控制模式的情况下,以减少马达辅助频率的方式进行修正。因此,在放电深度限制控制模式的情况下,由于可以抑制进行辅助的频率,因此可以迅速恢复蓄电池的残存容量SOC。
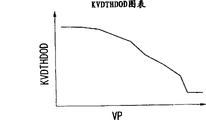
接着,在步骤S154中,如图16所示用图表检索求出对应于控制用车速VP的油门辅助触发DOD修正量车速修正系数KVDTHDOD。控制用车速越大,油门辅助触发DOD修正量车速修正系数KVDTHDOD越小。
接着在步骤S155中,将在步骤S150中求出的大气压修正值DTHAPA与在步骤S152或者步骤S153中求出的DOD限制控制模式修正值DTHDOD和在步骤S154中求出的油门辅助触发DOD修正量车速修正系数KVDTHDOD的乘积相加,由此求出油门辅助触发修正值DTHAST,结束流程。
因此,当因阻滞(塞车)等使车速较低时,在反复进行停止起步而不能确保再生的情况下,通过在放电深度限制模式中增大油门辅助触发DOD修正量车速修正系数KVDTHDOD来提高辅助触发阈值,从而可以迅速进行放电深度限制模式中的蓄电池残存容量的恢复。
“PB辅助触发修正(MT)”
图17是前述步骤S111中吸气管负压油门辅助触发修正的流程图。
在步骤S160中进行对应于大气压的大气压修正值(DPBAPA)的检索。如图18所示,该检索是对修正值进行图表检索,在吸气管负压辅助触发PA修正图表中所述修正值设定成随着从高地到低地逐步下降。通过该图表检索求出大气压修正值DPBAPA。
接着,在步骤S161中,通过判断DOD限制判断标志F_DODLMT是否为“1”来判断是否对蓄电池的放电深度DOD进行限制处理。当为放电深度限制控制模式时,在步骤S162中将基于图19图表检索出的DOD限制控制模式修正值#DPBDOD代入DOD限制控制模式修正值DPBDOD。
另一方面,在放电深度限制控制模式被解除的情况下进入下一步骤S163中,将“0”代入DOD限制控制模式修正值DPBDOD。
该情况下的规定值#DPBDOD被设定为提高用于马达辅助判断值的正值,在放电深度限制控制模式的情况下,以减少马达辅助频率的方式进行修正。因此,在放电深度限制控制模式的情况下,由于可以抑制进行辅助的频率,因此可以迅速恢复蓄电池的残存容量SOC。
接着,在步骤S164中,如图20所示,用图表检索求出对应于控制用车速VP的油门辅助触发DOD修正量车速修正系数KVDPBDOD。
接着在步骤S165中,将在步骤S160中求出的大气压修正值DPBAPA与在步骤S162或者步骤S163中求出的DOD限制控制模式修正值DPBDOD和在步骤S164中求出的油门辅助触发DOD修正量车速修正系数KVDPBDOD的乘积相加,由此求出油门辅助触发修正值DPBAST,结束流程。
因此,当因阻滞等而使车速较低时,在反复进行停止起步而不能确保再生的情况下,通过在放电深度限制模式中提高辅助触发阈值,可以迅速进行放电深度限制模式中蓄电池残存容量的恢复。
“PB辅助触发修正(CVT)”
图21是前述步骤S123中吸气管负压油门辅助触发修正的流程图。
在步骤S170中进行对应于大气压的大气压修正值(DPBAPATH)的检索。如图22所示,该检索是对修正值进行图表检索,在吸气管负压辅助触发PA修正图表中所述修正值设定成随着从高地到低地逐步下降。通过该图表检索求出大气压修正值DPBAPATH。
接着,在步骤S171中,通过判断DOD限制判断标志F_DODLMT是否为“1”来判断是否对蓄电池的放电深度DOD进行限制处理。当为放电深度限制控制模式时,就在步骤S172中,将基于图23图表检索出的DOD限制控制模式修正值#DPBDODTH代入DOD限制控制模式修正值DPBDODTH。
另一方面,在放电深度限制控制模式被解除的情况下进入下一步骤S173中,将“0”代入DOD限制控制模式修正值DPBDODTH中。
该情况下的规定值#DPBDODTH被设定为提高用于马达辅助判断值的正值,在放电深度限制控制模式的情况下,以减少马达辅助频率的方式进行修正。因此,在放电深度限制控制模式的情况下,由于可以抑制进行辅助的频率,因此可以迅速恢复蓄电池的残存容量SOC。
接着,在步骤S174中,如图20所示,用图表检索求出对应于控制用车速VP的油门辅助触发DOD修正量车速修正系数KVDPBDOD。
接着在步骤S175中,将在步骤S170中求出的大气压修正值DPBAPATH与在步骤S172或者步骤S173中求出的DOD限制控制模式修正值DPBDODTH和在步骤S174中求出的油门辅助触发DOD修正量车速修正系数KVDPBDOD的乘积相加,由此求出油门辅助触发修正值DPBASTTH,结束流程。
因此,当因阻滞等而使车速较低时,在反复进行起步停止而不能确保再生的情况下,通过在放电深度限制模式中提高辅助触发阈值,可以在放电深度限制模式中迅速进行蓄电池残存容量的恢复。
因此,按照上述实施例,尤其是在进入放电深度限制控制模式中的情况下,通过根据放电深度提高辅助触发阈值来增大巡航频率,可根据放电深度迅速恢复蓄电池。而且,由于辅助触发修正值的设定对应于车速来设定修正值(车速越低辅助触发阈值就越高),因此即使在阻滞等时起步停止频繁反复进行,不能象高速行驶时那样充分确保再生的情况下,也能使得蓄电池的残存容量保持在能恢复的方向。
[第二实施例]
下面参照图24-27说明本发明的第二实施例。
该实施例在前述放电深度限制控制模式的场合、即在DOD限制判断标志F_DODLMT为“1”的情况下,修正和变换辅助触发阈值,在加速模式中调整辅助量。具体地说,在加速模式中设定最终辅助指令值ASTPWRF,在放电深度限制模式的情况下减少辅助量。下面以图24、25的流程图为中心进行说明。
在步骤S200中判断是否为加速模式,当判断为不是加速模式的情况下就在步骤S201中将最终辅助指令值ASTPWRF设定为“0”,并进入步骤S203中。当步骤S200中的判断结果为加速模式的情况下,就在步骤S202中将最终辅助指令值ASTPWRF代入通常辅助最终演算值ACCASTF中,并进入步骤S203中。
在步骤S203中进行通常辅助的计算处理,在步骤S204中进行起步辅助的计算处理,在步骤S205中进行攀爬辅助的计算处理,以计算出各辅助量。在步骤S206中判断起步辅助许可标志F_STRAST是否为“1”。在判断结果为“是”的情况下进入步骤S213中,在此判断攀爬辅助许可标志F_SCRAST是否为“1”。当步骤S213的判断结果为“是”时进入步骤S214中,在此判断最终攀爬辅助演算值SCRASTF是否大于最终起步辅助演算值STRASTF。当步骤S214的判断结果为“是”时进入步骤S208中。当步骤S214的判断结果为“否”时与步骤S213中判断结果为“否”的情况下同样地进入步骤S215中。
在步骤S206中的判断结果为“否”的情况下进入步骤S207中,在此判断攀爬辅助许可标志F_SCRAST是否为“1”。当判断结果为“是”时进入步骤S208中。当步骤S207的判断结果为“否”时进入步骤S211中。
在步骤S215中判断最终通常辅助演算值ACCASTF是否大于最终起步辅助演算值STRASTF。当判断结果为“是”时进入步骤S211中。当判断结果为“否”时进入步骤S216中。
在步骤S208中判断最终通常辅助演算值ACCASTF是否大于最终攀爬辅助演算值SCRASTF。当判断结果为“是”时进入步骤S211中。当判断结果为“否”时进入步骤S209中。
在步骤S216中将最终起步辅助演算值STRASTF代入最终辅助指令值ASTPWRF中,在步骤S211中将最终通常辅助演算值ACCASTF代入最终辅助指令值ASTPWRF中,在步骤S209中将最终攀爬辅助演算值SCRASTF代入最终辅助指令值ASTPWRF中。
因此,通过其前阶段的判断,在最终起步辅助演算值STRASTF、最终通常辅助演算值ACCASTF和最终攀爬辅助演算值SCRASTF中设定最大的数值。
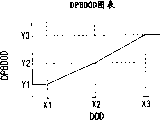
在步骤S209、S211、S216的任一步骤中,当最终辅助指令值ASTPWRF被设定为规定的辅助量时,如图26所示,在步骤S217中,根据控制用车速VP通过图表检索求出辅助量上限值ASTVHG。接着,在步骤S218中,如图28所示,根据放电深度DOD通过图表检索求出对应于的DOD修正系数#KAPDOD(小于1的值),在步骤S219中使最终辅助指令值ASTPERF与上述DOD修正系数KAPDOD相乘,之后进入步骤S220。
在步骤S220中判断最终辅助指令值ASTPWRF是否在辅助量上限值ASTVHG以上,当判断结果为“是”时就在步骤S221中将辅助量上限值ASTVHG设定为最终辅助指令值ASTPWRF,在步骤S222中将最终发电量设定为“0”,然后返回。在步骤S220中的判断结果为“否”的情况下进入步骤S222中。
因此,在该加速模式中,在放电深度限制模式的情况下,由于根据放电深度DOD来减小最终辅助指令值ASTPWRF,因此加速模式中的辅助量变小,这有利于蓄电池残存容量的迅速恢复。特别是,即使在因阻滞等而反复进行起步停止地进行行驶的情况下,不能充分确保再生的场合,也可通过减小上述辅助量来期待蓄电池残存容量的恢复。
在该实施例中,能兼用第一实施例中的辅助触发阈值的升高量。
[第3实施例]
下面,根据附图28~附图33对本发明的第3实施例进行说明。该实施例在前述放电深度控制模式的情况下,即在DOD限制判定标志F_DODLMT为“1”的情况下,代替修正第1实施例所示的辅助触发阈值,在巡航工作方式中调整发电量。具体来说,在巡航工作方式中的DOD发电模式中,设定对应放电深度DOD的修正系数,当处于放电深度限制模式下时,根据放电深度DOD增大发电量。首先,对图28的流程图进行说明。
在图28的步骤S250中,判定是否为巡航方式(发电模式)。在判定结果不为巡航方式时,在步骤S251中,将最终巡航发电量CRSRGNF设定为“0”,进入步骤S253。当步骤S250中的判定结果为巡航方式时,在步骤252中,将最终充电指令值REGENF设定为最终巡航发电量CRSRGNF,进入步骤S253。
在步骤S253中,进行后述的图29,图30的巡航发电量计算处理。进入步骤S254,判定逐渐减算计时器TCRSRGN是否为“0”,当判定结果为“否”时,在步骤S262中,将最终巡航发电量CRSRGNF设定为最终充电指令值REGENF,在步骤S263,将最终辅助指令值ASTWRF设定为“0”,之后,结束控制。
当步骤S254中的判定结果为“是”时,在步骤S255中,将逐渐减算计时器TCRSRGN设定为规定值#TMCRSRGN,之后,进入步骤S256。在步骤S256中,判定巡航发电量CRSRGN是否大于最终巡航发电量CRSRGNF。
当步骤S256中的判定结果为“是”时,在步骤S260中,在最终巡航发电量CRSRGNF上增加逐渐加算量#DCRSRGN,在步骤S261中,再次判定巡航发电量CRSRGN是否大于最终巡航发电量CRSRGNF。步骤S261中的判定结果,当巡航发电量CRSRGN大于最终巡航发电量CRSRGNF时,进入步骤S262。
步骤S261中的结果,当巡航发电量CRSRGN小于最终巡航发电量CRSRGNF时,进入步骤S259,在该步骤中,将巡航发电量CRSRGN代入最终巡航发电量CRSRGNF,之后,进入步骤S262。
当步骤S256中的判定结果为“否”时,在步骤S267,在最终巡航发电量CRSRGNF中减去逐渐减算量#DCRSRGNM,在步骤S258中,判定最终巡航发电量CRSRGNF是否大于巡航发电量CRSRGN。步骤S258的判定结果,当巡航发电量CRSRGN大于最终巡航发电量CRSRGNF时,进入步骤S259。步骤S258的判定结果,当最终巡航发电量CRSRGNF大于巡航发电量CRSRGN时,进入步骤S262。
因此,通过步骤S254以后的处理,在发电量不会产生急剧变化的情况下,能够平稳地进入巡航发电模式。
下面,通过图29和图30对图28中步骤S253中的巡航发电量的计算流程图进行说明。在步骤S300中,以图表检索出巡航发电量CRSRGN M。该图表描述了根据发动机转速NE,吸气管负压PBGA而定的发电量,且以CVT和MT进行更换。
接着,进入步骤S302,判定储能区域D判定标志F_ESZONED是否为“1”。当判定结果为“是”,即蓄电池残存容量SOC处于所述区域D时,进入步骤S322,将巡航发电量CRSRGN设定为“0”并进入步骤S326。在步骤S362中,判定最终巡航发电量CRSRGNF是否为“0”。步骤S326中的判定结果,在指令值不为“0”的情况下,进入步骤S327,转换进入巡航发电停止模式,之后,结束控制。步骤S326中的判定结果,在指令值为“0”的情况下,进入步骤S328,转换进入巡航蓄电池供电模式,之后,结束控制。
当步骤S302的判定结果为“否”时,即蓄电池残存容量SOC处于所述区域D以外时,进入步骤S303,判定储能区C判定标志F_ESZONEC是否为“1”。当判定结果为“是”,即蓄电池残存容量SOC处于区域C时,进入步骤S304。此处,将“1”(强发电模式用)代入巡航发电量修正系数KCRSRGN,进入步骤S316。当在步骤S303中的判定结果为“否”,即蓄电池残存容量SOC处于所述区域C以外时,进入步骤S305。
在步骤S305中,判定储能区B判定标志F_ESZONEB是否为“1”。当判定结果为“是”,即蓄电池残存容量SOC处于区域B时,进入步骤S306。在步骤S306中将发电量系数#KCRGNWK(弱发电模式用)代入巡航发电量修正系数KCRSRGN,进入步骤S313。
另一方面,当步骤S305中的判定结果为“否”,即蓄电池残存容量SOC处于区域B以外时,进入步骤S307,此处,判定DOD极限判定标志F_DODLMT的标志值是否为“1”。当步骤S307中的判定结果为“是”时,进入步骤S307A,在此采用如图31所示的方式图表检索对应于放电深度DOD的巡航发电量修正系数#KCRGNDOD(DOD限制发电模式用),进入步骤S308,将巡航发电量修正系数#KCRGN DOD(DOD限制发电模式用)代入巡航发电量修正系数KCRSRGN,进入步骤S313。
以此实现比通常更大的增量,且通过根据放电深度DOD的增量所设定的发电量,可迅速恢复蓄电池的残存容量SOC。
另一方面,当步骤S307中的判定结果为“否”时,进入步骤S309,判定空气调节器打开的标志F_ACC的标志值是否为“1”。在判定结果为“1”,即空气调节器为“打开”的情况下,进入步骤S310,将巡航发电量修正系数#KCRGNHAC(HAC_ON发电模式用)代入巡航发电量的修正系数KCRSRGN,进入步骤S313。
在步骤S309中的判定结果为“否”,即空气调节器为“关闭”的情况下,进入步骤S311,判定巡航模式判定标志F_MACRS的标志值是否为“1”。在步骤S311中的判定结果为“否”,即在判定不在巡航模式中的情况下,进入步骤S323,将“0”代入巡航发电量CRSGRN,之后,进入步骤S324。当步骤S311的判定结果为“是”,即判定处于巡航模式中时,进入步骤S312,将巡航发电量系数#KCRGN(通常发电模式用)代入巡航发电量CRSRGN,之后,进入步骤S313。
在步骤S324中,判定发动机转动转速NE是否小于巡航蓄电池供电模式执行上限发动机转速#NDVSTP,在判定结果为“是”,即发动机转速NE≤巡航蓄电池供电模式执行上限发动机转速#NDVSTP的情况下,进入步骤S325。在步骤S325中,判定降压器标志F_DV是否为“1”,在判定结果为“是”的情况下,进入步骤S327的巡航发电停止模式。在步骤S325中所判定结果为“否”的情况下,进入步骤S326。
在步骤S324中的判定结果为“否”,即发动机转速NE>巡航蓄电池供电模式执行上限发动机转速#NDVSTP时,进入步骤S327。上述巡航蓄电池供电模式执行上限发动机转速#NDVSTP是具有滞后的值。
在步骤S313中,判定蓄电池的残存容量QBAT(与SOC相同)是否大于通常发电模式执行上限残存容量#QBCRSRH。上述通常发电模式执行上限残存容量#QBCRSRH是具有滞后的值。
在步骤S313的判定结果为“是”,即蓄电池的残存容量QBAT≥通常发电模式执行上限残存容量#QBCRSRH的情况下,进入步骤S323。
在蓄电池残存容量QBAT<通常发电模式执行上限残存容量#QBCRSRH的情况下,在步骤S324中,判定稀混合气(贫燃)判定标志F_KCMLB的值是否为“1”。当判定结果为“是”,即判定结果为稀混合气时,在步骤S315中,将巡航发电量系数#KCRGNLB(贫燃发电模式用)乘以巡航发电量修正系数KCRSRGN所得的值代入巡航发电量修正系数KCRSRGN,进入步骤S316。当步骤S314的判定结果为“否”,即在判定不处于稀混合气状态下时,进入步骤S316。
在步骤S316中,由发动机控制用车速VP通过#KVCRSRG图表检索求出图32所示的巡航发电量减算系数KVCRSRG。接着,在步骤S317中,将巡航发电量的图表值CRCRGNM中的发电量的修正系数KCRSRGN与巡航发电量减算系数KVCRSRG相乘所得的值代入巡航发电量CRSRGN,进入步骤S318,由控制用大气压通过#KPACRSRN图表检索求出在图33中所示的巡航发电量PA修正系数KPACRSR。
在步骤S319中,将巡航发电量CRSRGN与在步骤S318中求出的巡航发电量PA修正系数KPACRSRN和巡航发电量减算系数KTRGRGN(在辅助触发判定的步骤S121中设定)以及在步骤S316中求得的巡航发电量KVCRSRG相乘,求得最终的巡航发电量CRSRGN,在步骤S320中,转换进入巡航充电模式。
在所述实施例中,可兼用第1实施例中的辅助触发阈值的提高,或兼用第2实施例中加速模式的辅助量减少量,另外,可同时兼用第1、2实施例。
因此,在这一实施例中,在处于放电深度限制模式的情况下,由于增大了巡航时的发电量,且放电深度DOD越大越增大修正系数来增大所述发电量,因此,可恢复蓄电池残存容量。
[第四实施例]
下面,对本发明的第4实施例进行说明。此处省略了对与第一实施例具有相同结构的说明。附图34为第4实施例中进行放电深度限制判定的流程图。
首先,在步骤S450中,判定起动开关判定标志F_STS的标志值是否为“1”,即是否为最初行驶中的起动时间。在判定结果为“1”,即判定处于最初行驶的情况下,在步骤S457中,读取行驶开始时的蓄电池残存容量SOC的初始值SOCINT。接着,在步骤S458中,判定蓄电池残存容量SOC的初始值SOCINT是否小于放电深度限制初始下限值#SOCINTL。上述放电深度限制初始下限值#SOCINT例如为50%。
在判定步骤S458中的判定结果为“是”,即蓄电池残存容量SOC的初始值SOCINT<放电深度限制初始下限值#SOCINT的情况(即处于低容量的情况)下,进入步骤S459,将放电深度限制初始下限值#SOCINTL代入蓄电池残存容量SOC的初始值,随即进入步骤S460。即,在上述放电深度限制初始下限值#SOCINT为例如50%,蓄电池残存容量SOC小于50%的情况下,将50%代入蓄电池残存容量SOC的初始值。
并且,在判定步骤S458中的判定结果为“否”,即蓄电池残存容量SOC的初始值SOCINT≥放电深度限制初始下限值#SOCINT的情况(高容量情况)下,进入步骤S460。
在步骤S460中,根据蓄电池残存容量SOC的初始值SOCINT设定下限阈值SOCLMTL,随后在步骤S461中设定上限阈值SOCLMTH(参照附图37)。确定下限阈值SOCLMTL的放电深度限制值#DODLMT也取决于各种蓄电池3的性质,例如,为蓄电池残存容量SOC的10%,确定上限阈值SOCLMTH的放电深度限制值解除SOC上升值#SOCUP为例如,蓄电池残存容量SOC的5%。
因此,例如,在蓄电池残存容量SOC的初始值SOCINTL为55%时,下限阈值SOCLMTL为45%,上限阈值SOCLMTH为60%。并且,在蓄电池残存容量SOC的初始值为40%的情况下,在步骤S459中,由于将例如50%代入蓄电池残存容量SOC的初始值,因此,下限阈值SOCLMTL为40%,上限阈值SOCLMTH为55%。
这样,在蓄电池残存容量SOC的初始值小于放电深度限制初始下限值#SOCINTL时,通过将放电深度限制初始下限值#SOCINTL代入蓄电池残存容量SOC的初始值,从而通过提高初始值而减小了至下限阈值SOCLNTL的深度。因此,在起动时蓄电池残存容量SOC较少时,即在蓄电池残存容量SOC小于放电深度限制初始下限值#SOCLNTL时,缩短了进入放电深度限制控制的时间,并且,通过蓄电池残存容量SOC的初始值,与起动同时进入放电深度限制控制状态,从而能迅速恢复蓄电池的残存容量SOC。
接着,在步骤S462中,将前述的DOD限制判定标志F_DODLMT置为“0”,并解除前次放电深度限制控制模式的设定。进入步骤S463。在步骤S463中,求出表示蓄电池残存容量当前值SOC从初始值SOCINT放电了多少的放电深度DOD,结束控制。即,无论DOD初始值判定标志F_DODLMT的值如何,均应求出所述放电深度DOD。
开始行驶并在步骤S450中,若起动开关判定标志F_STS为“0”,则在步骤S451中判定储能区D是否为“1”,在判定结果为“否”,即在区域D以外的情况下,进入步骤S452。在步骤S451中的判定结果为“是”,即在处于区域D内的情况下,进入步骤S462。在下面的步骤S452中,判定当前的蓄电池残存容量SOC是否大于放电深度限制实施上限值SOCUPH。在判定结果为“是”,即判定在当前的蓄电池残存容量SOC>放电深度限制实施上限值SOCUPH的情况(在高容量情况)下,进入步骤S456。在判定步骤S452的判定结果为“否”,即当前的蓄电池残存容量SOC≤放电深度限制实施上限值SOCUPH的情况(在低容量情况)下,进入步骤S453。上述放电深度限制实施上限值SOCUPH,例如设定为70%。
接着,在步骤S453中,判定蓄电池残存容量SOC是否小于前述下限阈值SOCLMTL。在判定结果为“是”,即判定蓄电池残存容量SOC<下限阈值SOCLMTL的情况(在低容量情况)下,在步骤S454中将DOD限制判定标志F_DODLMT设定为“1”,以设定放电深度限制控制模式,进入步骤S463。由此,在后述的辅助触发判定中,对应所述DOD限制判定标志F_DODLMT的状态进行控制。
若进入放电深度限制控制模式,如图35所示,进行使蓄电池残存容量SOC增加的发电,但在步骤S453中,在判定蓄电池残存容量SOC≥下限阈值SOCLMTL,即蓄电池残存容量SOC大于下限值SOCLMTL的情况(在高容量情况)下,在步骤S455中判定DOD限制判定标志F_DODLMT的状态。
在步骤S455中的判别结果为“是”,即设定了放电深度限制控制模式的情况下,在步骤S456中,判定是否蓄电池残存容量SOC>上限阈值SOCLMTH,即蓄电池残存容量SOC是否大于放电深度限制实施上限阈值SOCLMTH。在步骤S456中,判定蓄电池残存容量SOC>上限阈值SOCLMTH,即判定蓄电池残存容量SOC大于上限阈值SOCLMTH(处于高容量情况下)时,进入步骤S457,更新蓄电池残存容量SOC的初始值SOCLMTL以及对应于该值的上限阈值SOCLMTH,下限阈值SOCLMTL。基于此更新的蓄电池残存容量SOC增加持续直至在步骤S451中蓄电池残存容量SOC达到区域D。因此,能够迅速恢复蓄电池残存容量SOC,同时,能防止超出需要的充电。
在步骤S455中,在DOD限制判定标志F_DODLMT的标志值为“0”,即解除了放电深度限制控制模式的设定的情况下,或在步骤S456中蓄电池残存容量SOC≤上限阈值SOCLMTH的情况(在低容量的情况)下,进入步骤S463。
下面,对所述放电深度限制控制模式的具体内容进行说明。
在放电深度限制控制模式中,在具有减小倾向的蓄电池残存容量SOC达到下限阈值SOCLMTL的情况下,为了使蓄电池残存容量SOC增加而进行控制。因此,通过提高用于判定是否进行加速的辅助触发阈值,降低加速频率并增加巡航模式中的充电频率以进行对蓄电池的充电。
下面,对辅助触发的判定进行说明。
图36,图37为辅助触发判定的流程图,具体地说,为由区域判定加速/巡航模式的流程图。
在步骤S500,判定储能区C判定标志F_ESZONEC的标志值是否为“1”。在判定结果为“是”,即判定蓄电池残存容量SOC处于C区的情况下,在步骤S536中,判定最终辅助指令值ASTPWRF是否小于0。在步骤S536中的判定结果为“是”,即判定最终辅助指令值ASTOWRF小于0的情况下,在步骤S537中,将1.0代入巡航发电量减算系数KTRGRGN,在步骤S522中,将“0”代入马达辅助判定标志F_MAST后,返回。
在步骤S500及步骤S536中的判定结果为“否”的情况下,在步骤S501中,进行油门辅助触发修正值DTHAST的计算处理。其处理内容如后文所述。
下面,在步骤S502中,由油门辅助触发图表检索构成油门辅助触发基准的阈值MTHASTN。如图40中实线所示,所述油门辅助触发图表用于根据发动机转速NE确定作为是否进行马达辅助判定基准的阈值MTHASTN,因此,根据发动机转速NE来确定阈值。
在下面的步骤S503,步骤S506中,在将在前述步骤S501中算出的修正值DTHAST加至油门辅助触发基准阈值MTHASTN而求出高油门辅助触发阈值MTHASTH的同时,减去用于根据所述高油门辅助触发阈值MTHASTH设定滞后量的差#DMTHAST,从而求得低油门辅助触发阈值MTHASTL。将所述高低油门辅助触发阈值一并记载在图38中的油门辅助触发图表的基准阈值MTHASTN中并以虚线表示。
在上述步骤S503后的步骤S504中,根据发动机转速NE、通过图43所示的油门辅助触发上限范围图表检索油门辅助触发上限值MTHHASTN。在步骤S505中,判定在步骤S503中求得的高油门辅助触发阈值MTHASTH是否大于油门辅助触发上限值MTHHASTN。判定结果,在高油门辅助触发阈值MTHASTH大于油门辅助触发上限值MTHHASTN时,进入步骤S505A。此处,将油门辅助触发上限值MTHHASTN代入高油门辅助触发阈值MTHASTH后,进入步骤S5062。当步骤S505的判定结果,即高油门辅助触发基准的阈值MTHAST H小于油门辅助触发上限值MTHHASTN时,进入步骤S506。
因此,通过上述步骤S504,S505,S505A,无论后述步骤S501的油门辅助触发修正运算中的辅助触发阈值的提高量是多少,也设定作为油门辅助触发上限值MTHHASTN限度的辅助触发阈值。因此,通过根据发动机转速NE在高油门辅助触发阈值MTHASTH中设置上限值,防止了出现难于进入辅助状态的情况并提高了驱动性。
在步骤S507中,判断油门开度的当前值THEM是否大于在步骤S505,步骤S506中求得的油门辅助触发阈值MTHAST。在该情况下的油门辅助触发阈值MTHAST为持有前述滞后量的值,分别参照在油门开度处于扩大方向时的高油门辅助触发阈值MTHAST H,及在油门处于缩小方向时的低油门辅助触发阈值MTRHASTL。
在所述步骤S507中的判定结果为“是”的情况下,即在油门开度的当前值THEM大于油门辅助触发阈值MTHAST(设定了高低滞后量的阈值)的情况下,进入步骤S509,在判定结果为“否”的情况下,即在油门开度的当前值THEM小于油门辅助触发阈值MTHAST(设定了高低滞后量的阈值)的情况下,进入步骤S508。
在步骤S509中,将油门马达辅助判断标志F_MASTTH设定为“1”,另一方面,在步骤S508,将油门马达辅助判断标志F_MASTTH设定为“0”。
在此处的处理中,由于进行了油门开度TH是否为所要求的马达辅助开度的判断,因此,在步骤S507中,在判断油门开度的当前值THEM大于油门辅助触发阈值MTHAST的情况下,将油门马达辅助判断标志F_MASTTH设定为“1”,通过在前述“加速模式”中读取该标志,可判定是要求马达辅助。
另一方面,在步骤S508中,所谓在油门马达辅助判断标志F_MASTTH设定“0”,表示未进入基于油门开度的马达辅助判定的区域内。在该实施例中,当以油门开度TH和发动机的吸气管负压PB两者进行辅助触发的判定时,在油门开度的当前值THEM大于所述油门马达辅助触发阈值MTHAST的情况下,由油门开度TH进行辅助判定,在未超过该阈值的范围内,由后述的吸气管负压PB进行判定。
在步骤S509中,将油门马达辅助判断标志F_MASTTH设定为“1”后,脱离通常的辅助判定而进入步骤S534,将巡航发电量的减算系数KTRGRGN设定为“0”,在其后的步骤S535中,将马达辅助判定标志F_MAST设定为“1”,之后,返回。
另一方面,在步骤S510中,判定MV/CVT判定标志F_AT的标志值是否为“1”。在判定结果为“否”的情况下,即为MT车时,进入步骤S511。在步骤S510的判定结果为“是”,即为CVT车的情况下,进入步骤S523。在步骤S511中,进行吸气管负压辅助触发修正值DPBAST的计算处理。其处理内容如后文所述。
接着,在步骤S512中,由吸气管负压辅助触发图表检索吸气管负压辅助触发阈值MASTL/H。如图39中2根实线所示,所述吸气管负压辅助触发图表对应于发动机转速NE,确定了为了判定是否进行马达辅助的高吸气管负压辅助触发阈值MASTH和低吸气管负压辅助触发阈值MASTL,在步骤S512的检索处理中,若根据吸气管负压PBA的增量或根据发动机转速NE的减少量,从下向上通过图38的高阈值线MASTH,则将马达辅助判定标志F_MAST从“0”设定为“1”,反之,若根据吸气管负压PBA的减少量或根据发动机转速NE的增加量从上向下通过低阈值线MASTL,则将马达辅助判定标志F_MASTL从“1”设定为“0”。如图39所示,按各齿轮档进行更换,且按浓/稀混合气进行更换。
在下面的步骤S513中,判定马达辅助判定标志F_MAST的标志值是否为“1”,在判定结果为“1”的情况下,进入步骤S514,在判定结果不为“1”的情况下,进入步骤S515。在步骤S514中,作为在步骤S512中检索所得的吸气管负压辅助触发的低阈值MASTL和在步骤S511中算出的修正值DPBAST的相加值计算出吸气管辅助触发阈值MAST,在步骤S516中,判定吸气管负压的当前值PBA是否大于在步骤S514中求得的吸气管辅助触发阈值MAST。在判定结果为“是”的情况下,进入步骤S534。在判定结果为“否”的情况下,进入步骤S519。并且,在步骤S515中,作为在步骤S512中检索所得的吸气管辅助触发高阈值MASTH及在步骤S511中计算出的修正值DPBAST的相加值计算出吸气管辅助触发阈值MAST,进入步骤S516。
接着,在步骤S519中,如图40所示,通过从上述吸气管负压辅助触发阈值MAST中减去规定的吸气管负压的增量值#DCRSPB(例如100mmHg),求得最终吸气管负压辅助触发阈值MASTFL。接着,在步骤S520中,如图41所示,以吸气管负压的当前值PBA内插算出最终吸气管负压辅助触发下限阈值MASTFL及吸气管负压辅助触发阈值MAST,之后,求出巡航发电量减算系数图表值KPBRGN,在步骤S521中,将发电量减算系数图表值KPBRGN代入巡航发电量减算系数KTRGRGN。在步骤S522中,将“0”代入马达辅助判定标志F_MAST,之后,返回。
在上述步骤S510中,在MT/CVT判定标志F_AT的标志值的判定结果为“是”,即为CVT车的情况下,进入步骤S523中,进行吸气管负压辅助触发修正值DPBASTTH的计算处理。其处理内容如后所述。
接着,在步骤S524中,由吸气管负压辅助触发图表检索吸气管负压辅助触发的阈值MASTTHL/H。所述吸气管负压辅助触发图表如图42中两条实线所示,对应发动机控制用车速VP,确定了为了判定是否进行马达辅助的高吸气管负压辅助触发的阈值MASTTHH和低吸气管负压辅助触发的阈值MASTTHL,在步骤S524的检索处理中,根据油门开度TH的增量,或根据发动机控制用车速VP的减少量,若从下向上通过图42的高阈值线MASTTHH,则将马达辅助判定标志F_MAST从“0”设定为“1”,反之,若根据油门开度TH的减少量,或根据发动机控制用车速VP的增加,从上向下通过图42的低阈值线MASTTHL,则将马达辅助判定标志F_MAST从“1”设定至“0”。如图42所示,每次按浓/稀混合气进行更换。
在其后的步骤S525中,判定马达辅助判定标志F_MAST的标志值是否为“1”,在判定结果为“1”的情况下,进入步骤S526,在判定结果不为“1”的情况下,进入步骤S527。在步骤S526中,作为在步骤S524中检索所得的吸气管负压辅助触发的低阈值MASTTH L和在步骤S523中检索所得的修正值DPBASTTH的相加值计算出吸气管负压辅助触发阈值MASTTH,在步骤S528中,判定油门开度的当前值THEM是否大于在步骤S526中求得的吸气管负压辅助触发阈值MASTTH。在判定结果为“是”的情况下,进入步骤S534。在判定结果为“否”的情况下,进入步骤S531。
接着,在步骤S531中,如图40所示,通过从上述吸气管负压辅助触发阈值MASTTH减去规定的油门开度的增量值#DCRSTHV,求得最终吸气管负压辅助触发下限阈值MASTTHFL。接着,在步骤S532中,以如图41所示的油门开度当前值THEM内插算出最终吸气管负压辅助触发下限阈值MASTTHFL和吸气管负压辅助触发阈值MASTTH,之后,求得巡航发电量减算系数图表值KPBRGTH,在步骤S533中,将巡航发电量减算系数图表值KPBRGTH代入巡航发电量减算系数KTRGRGN。在步骤S522中,将“0”代入马达辅助判定标志F_MAST后,返回。
图44为前述步骤S501中的油门辅助触发修正的流程图。
在步骤S550中,判定空调器离合器打开标志F_HMAS是否为“1”。在判定结果为“是”,即空调器离合器处于打开时,在步骤S551中,将规定值#DTHAAC(例如,20度)代入发动机修正值DTHAAC,之后进入步骤S553。
在步骤S550中的判定结果为“否”,即空调器离合器处于关闭时,将“0”代入发动机修正值DTHAAC,随即进入步骤S553。以此提高马达辅助阈值。
在步骤S553中,根据大气压(PA)进行大气压修正值(DTHAPA)的检索。所述修正是在油门辅助触发PA修正图表中、通过图表检索出设定为从高处至低处而下降的修正值进行的。通过所述图表检索可求得大气压修正值DTHAPA。
接着,在步骤S554中,判定大电流标志F_VELMAH是否为“1”。所述大电流标志的设定如后文所述。在12V系统的消耗电流大时,通过提高辅助触发阈值,可降低加速模式的频率并提高巡航模式的频率,从而防止蓄电池残存容量的下降。在步骤S554中的判定结果为流动着大电流的情况下,在步骤S555中,通过图表检索求得根据发动机转速NE增量而减小的大电流修正值DTHVEL,并进入步骤S557。在判定步骤S554中的判定结果是未流动大电流的情况下,在步骤S556中,将大电流修正值DTHVEL设定为“0”后,进入步骤S557。
然后,在步骤S557中,通过DOD极限判定标志F_DODLMT是否为“1”来判定是否在对蓄电池放电深度DOD进行限制处理。在处于放电深度限制控制模式时,在步骤S559中,根据图45以图表检索DOD限制控制模式修正值#DTHDOD,并将其代入DOD限制控制模式修正值DTHDOD。在步骤S560中,根据蓄电池残存容量SOC的初始值SOCINT,由图46图表检索出DOD限制控制模式残存容量修正值#KPDOD,之后,将其代入DOD限制控制模式残存容量修正值KPDOD,进入步骤S561。
另一方面,在步骤S557中,在判定放电深度限制控制模式被解除的情况下,进入其后的步骤S556,并将“0”代入DOD限制控制模式修正值DTHDOD。
该情况下的规定值#DTHDOD被设定为用于提高马达辅助判定值的正值,在处于放电深度限制控制的情况下,以减少马达辅助频率的方式进行修正。因此,在处于放电深度限制控制模式的情况下,由于能够抑制进入辅助的频率,故能够迅速恢复蓄电池残存容量SOC。
接着,在步骤S561中,通过由图47所示的图表检索求得基于控制用车速VP的油门辅助触发负荷修正量车速修正系数KVDTHAST。控制用车速VP越大,油门辅助触发负荷修正量车速修正系数KVDTHAST越小。由此,车速越低时的辅助触发阈值的升高量越增大。
接着,在步骤S562中,通过由图48所示的图表检索求得对应控制用车速VP的油门辅助触发DOD修正量车速修正系数KVDTHDOD。控制用车速越大,油门辅助触发DOD修正量车速修正系数KVDTHDOD越小。
在其后的步骤S563中,由在步骤S551或步骤S552中求得的空气调节器修正值DTHAAC,在步骤S553中求得的大气压修正值DTHAPA,在步骤S555或步骤S556中求得的大电流修正值DTHVEL,在步骤S558或步骤S559中求得的DOD限制控制模式修正值DTHDOD,在步骤S560中求得的DOD限制控制模式残存容量修正值KPDOD,在步骤S561中求得的油门辅助触发负荷限制量车速修正系数KVDTHAST,在步骤S562中求得的油门辅助触发DOD修正量车速修正系数KVDTHDOD求出油门辅助触发修正值DTHAST,之后,结束控制。
若处于DOD限制控制模式,通过在步骤S559中求得的DOD限制控制模式修正值DTHDOD及在步骤S562中求得的油门辅助触发DOD修正量车速修正系数KVDTHDOD提高辅助触发阈值,但是在蓄电池残存容量充足时,由于通过根据蓄电池残存容量SOC的初始值SOCINT、在步骤S560中确定的DOD限制控制模式残存容量修正值KPDOD,能减小辅助触发阈值的升高量,因此,消除了即使在蓄电池残存容量SOC较多时也难于进入加速模式的不良状态。即,由于在蓄电池残存容量SOC的初始值SOCINT较多时与较少时相比,能使辅助触发阈值的升高量较少,因此,并不是一律按放电深度DOD使其难以进入加速模式,故蓄电池残存容量SOC的初始值SOCINT较多时与较少时相比,能够容易地进入加速模式,从而提高了驱动性。
图49为前述步骤S511中吸气管负压油门辅助触发修正的流程图。
在步骤S601中,判定空气调节器离合器打开标志F_HMAST是否为“1”。在判定结果为“是”,即空气调节器离合器为打开的情况下,在步骤S603中,将所确定的值#DPBAAC代入空气调节器修正值DPBAAC,之后,进入步骤S604。在步骤S601中的判定结果为“否”的情况下,即在空气调节器离合器为关闭的情况下,在步骤S602中,将“0” 代入空气调节器修正值DPBAAC,进入步骤S604。由此进行马达辅助阈值的提高。
在步骤S604中,检索对应大气压的大气压修正值(DPBAPA)。所述修正为在吸气管负压辅助触发PA修正图表中、图表检索设定得从高向低而减小的修正值。通过图表检索求出大气压修正值DPBAPAC。
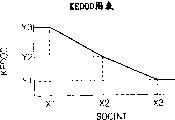
接着,在步骤S605中,通过DOD限制判定标志F_DODLMT是否为“1”来判定是否在对蓄电池放电深度DOD进行限制处理。在进入放电深度限制控制模式时,在步骤S606中,根据附图50图表检索出DOD限制控制模式修正值#DPBDOD,之后,将其代入DOD限制控制模式修正值DPBDOD,进入步骤S607。在步骤S607中,根据蓄电池残存容量SOC的初始值SOCINT,通过附图51图表检索出DOD限制模式残存容量修正值#KEDOD,之后,将其代入DOD限制模式残存容量修正值KEDOD,随即进入步骤S610。
另一方面,步骤S605中在解除放电深度限制控制模式的情况下,进入其后的步骤S608,将“0”代入DOD限制控制模式修正值DPBDOD后,进入步骤S609。
该情况下的规定值#DPBDOD被设定为用于提高马达辅助判定值的正值,在处于放电深度限制控制的情况下,以减小马达辅助频率的方式进行修正。因此,在处于放电深度限制控制的情况下,由于能够抑制进入辅助的频率,故能够迅速恢复蓄电池残存容量SOC。
接着,在步骤S609中,判定大电流标志F_VELMAH是否为“1”。所述大电流标志的设定如后文所述。与在步骤S554中所作的说明相同,在12V系统的消耗电流大时,必须提高辅助触发的阈值。在步骤S609中的判定结果为流过大电流的情况下,在步骤S610中,通过图表检索求出随着发动机转速NE而减小的大电流修正值DPBVEL,随即进入步骤S612。在步骤S609中的判定结果不是流过大电流的情况下,在步骤S611中将大电流修正值DPBVEL设定为“0”,随即进入步骤S612。
接着,在步骤S612中,通过图52所示的图表检索求出对应控制用车速VP的吸气管负压辅助触发负荷修正量车速修正系数KVDPBAST。理由与前述步骤S561中所作的说明相同,控制用车速VP越大,吸气管负压辅助触发负荷修正量车速修正系数KVDPBAST越小。
接着,在步骤S613中,如图53所示通过图表检索求出对应控制用车速VP的油门辅助触发DOD修正量车速修正系数KVDPBDOD。
在其后的步骤S614中,由在步骤S602或步骤S603中求得的空气调节器修正值DPBAAC,在步骤S604中求得的大气压修正值DPBAPA,在步骤S606或步骤S608中求得的DOD限制控制模式残存容量修正值DPBDOD,在步骤S607中求得的DOD限制控制模式修正值KEDOD,在步骤S5610或步骤S611中求得的大电流修正值DPBVEL,在步骤S612中求得的吸气管负辅助触发负荷限制量车速修正系数KVDPBAST,在步骤S613中求得的油门辅助触发DOD修正量车速修正系数KVDPBDOD求出吸气管负压辅助触发修正值DPBAST,之后,结束控制。
因此,若处于前述的DOD限制控制模式,虽然仅通过在步骤S606中求出的DOD限制控制模式残存容量修正值DPBDOD以及在步骤S613中求出的油门辅助触发DOD修正量车速修正系数KVDPBDOD便能提高辅助触发阈值,但是由于在蓄电池残存容量充足时,通过根据蓄电池残存容量SOC的初始值SOCINT确定的、在步骤S607中求出的DOD限制控制模式残存容量修正值KEDOD能减小辅助触发阈值的升高量,所以能够消除即使在蓄电池残存容量SOC较多时也难于进入加速模式的不良情况。即,蓄电池残存容量SOC的初始值SOCINT较多时与较少时相比,由于能够减小辅助触发阈值的升高量,因此,并不是一律按放电深度DOD使其难以进入加速模式,蓄电池残存容量SOC的初始值SOCINT较多时与较少时相比,能够容易地进入加速模式,从而能提高驱动性。
根据附图54,对进行大电流设定的流程图进行说明。步骤S580中,判定平均消耗电流VELAV是否大于规定值#VELMAH(例如,20A)。在判定结果为“是”,即12V系统消耗的大电流流过的情况下,在步骤S582中判定延时计时器TELMA是否为“0”,在处于“0”的情况下,在步骤S584中,将大电流F_VELMAH标志设定为“1”,之后结束控制。
步骤S582中的判定结果,在判定延时计时器TELMA不为“0”的情况下,进入步骤S583。在步骤S580中的判定结果为“否”,即判定未流过大电流的情况下,在步骤S581中,在延时计时器TELMA中设定规定值#TMELMA(例如,30秒),进入步骤S583。在步骤S583中,将大电流标志F_VELMAH设定为“0”,随即结束控制。在前述步骤S554,步骤S609及后述的步骤S659中判定此处的大电流标志F_VELMAH。
由于通过延时计时器TELMA计时、把上述12V系统的消耗电流大的状态限制在持续一定时间的情况,因此,排除了例如电动车窗升降及制动灯点亮等瞬时增大消耗电流的情况。
图55为前述步骤S523中吸气管负压辅助触发修正的流程图。
在步骤S651中,判定空气调节器离合器打开标志F_HMAST是否为“1”。在判定结果为“是”的情况下,即空气调节器离合器为打开的情况下,在步骤S653中,将规定值#DPBAACTH代入空气调节器修正值DPBAACTH,之后进入步骤S654。在步骤S651中的判定结果为“否”,即空气调节器离合器为关闭的情况下,在步骤S652中将“0”代入空气调节器修正值DPBAACTH,随即进入步骤S654。由此,能够提高马达辅助的阈值。
在步骤S654中,检索对应大气压的大气压修正值(DPBATH)。所述修正是在巡航发电量PA修正图表中、图表检索出设定为从高处向低处而下降的修正值。通过所述图表检索可求得大气压修正值DTBATH。
接着,在步骤S655中,通过判定DOD极限判定标志F_DODLMT是否为“1”来判定是否在实施对蓄电池放电深度DOD的限制处理。在处于放电深度限制控制模式时,在步骤S656中,根据附图56图表检索出DOD限制控制模式修正值#DPBDODTH,之后将其代入DOD限制控制模式修正值DPBDODTH,随即进入步骤S657。在步骤S657中,根据蓄电池残存容量SOC的初始值SOCINT,由附图51图表检索出DOD限制模式残存容量修正值#KEDOD,之后将其代入DOD限制模式残存容量修正值KEDOD,随即进入步骤S660。
另一方面,当在步骤S655中解除放电深度限制控制模式时,进入其后的步骤S658,将“0”代入DOD限制控制模式修正值DPBDODTH,之后进入步骤S659。
该情况下的规定值#DPBDODTH被设定为用于提高马达辅助判定值的正值,在处于放电深度限制控制的情况下,以减少马达辅助频率的方式进行修正。因此,在处于放电深度限制控制的情况下,由于抑制了进入辅助的频率,能够迅速恢复蓄电池残存容量SOC。
接着,在步骤S659中,判定大电流标志F_VELMAH是否为“1”。对于所述大电流标志的设定如后所述。与在步骤S554中的说明相同,在12V系统的消耗电流大时,必须提高辅助触发的阈值。在步骤S659的判定结果为流过大电流的情况下,在步骤S660中,通过图表检索求出对应控制用车速VP而减小的大电流修正值DPBVELTH,之后,进入步骤S662。在步骤S659中的判定结果不是流过大电流的情况下,在步骤S661中将大电流修正值DPBVELTH设定为“0”,之后进入步骤S662。
接着,在步骤S662中,如附图52所示通过图表检索求出对应控制用车速VP的吸气管负压辅助触发负荷修正量车速修正系数KVDPBAST。与前述步骤S561的说明同样的理由,当控制用车速VP越大时,吸气管负压辅助触发负荷修正系数KVDPBAST越小。
接着,在步骤S663中根据控制用车速VP由图53所示的图表检索求出油门辅助触发DOD修正量车速修正系数KVDPBDOD。
在其后的步骤S664中,由在步骤S652或步骤S653中求得的空气调节器修正值DPBAACTH,在步骤S654中求得的大气压修正值DPBAPATH,在步骤S656或步骤S658中求得的DOD限制控制模式残存容量修正值DPBDODTH,在步骤S657中求得的DOD限制控制模式修正值KEDOD,在步骤S5660或步骤S661中求得的大电流修正值DPBVELTH,在步骤S662中求得的吸气管负辅助触发负荷修正量车速修正系数KVDPBAST,在步骤S663中求得的油门辅助触发DOD修正量车速修正系数KVDPBDOD求出吸气管负压辅助触发修正值DPBASTTH,之后结束控制。
因此,若处于前述DOD限制控制模式,虽然仅以在步骤S656中求出的DOD限制控制模式残存容量修正值DPBDODTH以及在步骤S663中求出的油门辅助触发DOD修正量车速修正系数KVDPBDOD便能提高辅助触发阈值,但是由于在蓄电池残存容量充足时,根据蓄电池残存容量SOC的初始值SOCINT确定、在步骤S657中求出的DOD限制控制模式残存容量修正值KEDOD能减小辅助触发阈值的升高量,所以能够消除即使在蓄电池残存容量SOC较多时也难于进入加速模式的不良情况。
即,蓄电池残存容量SOC的初始值SOCINT较多时与较少时相比,由于能够减小辅助触发阈值的升高量,因此,并不是一律按放电深度DOD使其难以进入加速模式,蓄电池残存容量SOC的初始值SOCINT较多时与较少时相比,能够容易地进入加速模式,从而能提高驱动性。
因此,若通过上述实施例,尤其在进入放电深度限制控制模式的情况下,通过根据放电深度DOD升高辅助触发阈值并增加巡航频率,根据放电深度DOD能够迅速恢复蓄电池3。并且,关于辅助触发修正值的设定,由于设定了根据控制用车速VP的修正值(车速越低,辅助触发阈值越高),因此,即使在由于在阻滞时等需频繁进行起步停止,不能象高速行驶那样充分确保再生性的情况下,也能够迅速恢复蓄电池残存容量SOC。
而且另一方面,由于根据蓄电池残存容量SOC的初始值SOCINT,能够改变加至辅助触发阈值的附加量,油门辅助触发修正值DTHAST,修正值DPBAST,吸气管负压辅助触发修正值DPBASTTH相乘所得的系数(DOD限制控制模式残存容量修正值KPDOD,KEDOD),因此,在蓄电池残存容量SOC的初始值SOCINT较多的情况下,能减小由放电深度限制控制模式产生的效果。所以,在蓄电池残存容量SOC的初始值SOCINT较多的情况下,也能避免发生难以进入加速模式的情况,提高了驱动性。即,蓄电池残存容量SOC的初始值SOCINT较多时与较少时相比,由于能够减小辅助触发阈值的升高量,因此并不是一律按放电深度DOD使其难以进入加速模式,蓄电池残存容量SOC的初始值SOCINT较多时与较少时相比,能够容易地进入加速模式,从而能提高驱动性。
本发明并不局限于上述实施例,为了对蓄电池进行充电,可一并采用各种方式,例如,在巡航时比通常状况更增加充电量,在加速时比通常状况更减少辅助量等,来抑制蓄电池的放电量,增加了充电量。另外,当增加巡航时的充电量或减少加速时的辅助量时,根据蓄电池残存容量的初始值SOCINT对其充电量和辅助量进行调整,在蓄电池残存容量的初始值较多时,能根据该值或减少上述充电量或增大辅助量。
Claims (5)
1.混合动力车辆的控制装置,其具有以下的构造:
输出车辆的推进力的发动机;
产生辅助该发动机的输出的辅助驱动力的马达;
向马达供给电力或对通过车辆减速时马达的再生操作而获得的再生能量进行蓄电的蓄电装置;
根据前述车辆的运行状态来判断可否由前述马达来辅助发动机的输出的辅助判断单元;
在通过前述辅助判断单元判断为由马达进行辅助发动机的输出的情况下,根据前述发动机的运行状态来设定前述马达的辅助量的辅助量设定单元;
辅助控制单元,用于根据由该辅助量设定单元设定的辅助量,进行由前述马达对前述发动机的输出辅助;其特征是还包括:
检测车辆的行驶开始的行驶开始检测单元;
计算出蓄电装置中残存容量的残存容量检测单元;
放电深度检测单元,用于检测出相对于检测出行驶开始时的蓄电装置的初始残存容量的当前残存容量的放电量;
下限阈值设定单元,用于设定相对于前述初始残存容量的放电量的下限阈值;
上限阈值设定单元,用于设定相对于前述初始残存容量的放电量的上限阈值;
在蓄电装置的残存容量减少到上述下限阈值时变更前述马达的控制的模式设定单元;
模式设定解除单元,用于在蓄电装置的残存容量达到上述上限阈值的情况下,解除由前述模式设定单元所变更的马达控制模式的设定;
判断阈值修正单元,用于在由前述模式设定单元变更了马达的控制时,根据通过前述放电深度检测单元检测出的放电深度,对作为由前述辅助判断单元进行判断的基准的辅助发动机输出的判断阈值进行修正。
2.根据权利要求1所述的混合动力车辆的控制装置,其特征是:由前述判断阈值修正单元修正的判断阈值是根据车速进行修正的。
3.根据权利要求1所述的混合动力车辆的控制装置,其特征是:替换前述判断阈值修正单元,设有辅助量变更单元或者巡航发电量变更单元,其中辅助量变更单元修正由马达进行的发动机的驱动辅助量,巡航发电量变更单元用于修正巡航行驶时对蓄电装置的充电量。
4.混合动力车辆的控制装置,其具有以下的构造:
输出车辆的推进力的发动机;
产生用于辅助该发动机的输出的辅助驱动力的马达;
向马达供给电力或对通过车辆减速时马达的再生操作而获得的再生能量进行蓄电的蓄电装置;
根据前述车辆的运行状态来判断可否由前述马达来辅助发动机的输出的辅助判断单元;其特征是还包括:
检测车辆行驶开始的行驶开始检测单元;
计算出蓄电装置的残存容量的残存容量检测单元;
放电深度检测单元,用于相对于检测出行驶开始时的蓄电装置的初始残存容量,检测出当前残存容量的放电量;
下限阈值设定单元,用于相对于前述初始残存容量来设定放电量的下限阈值;
上限阈值设定单元,用于相对于前述初始残存容量来设定放电量的上限阈值;
模式设定单元,用于在蓄电装置的残存容量减少至上述下限阈值时变更前述马达的控制;
模式设定解除单元,用于在蓄电装置的残存容量达到上述上限阈值的情况下,解除由前述模式设定单元的变更的马达控制模式的设定;
判断阈值修正单元,用于在由前述模式设定单元变更马达的控制时,根据通过前述放电深度检测单元检测出的放电深度,对作为由前述辅助判断单元进行判断的基准的辅助发动机输出的判断阈值进行修正;
判断阈值残存容量修正单元,用于进一步根据前述蓄电装置的初始残存容量修正由该判断阈值修正单元所修正的判断阈值。
5.如权利要求4所述的混合动力车辆的控制装置,其特征是:蓄电装置的初始残存容量越多,则上述判断阈值残存容量修正单元使判断阈值的修正量越小。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP26950299A JP3300307B2 (ja) | 1999-09-22 | 1999-09-22 | ハイブリッド車両の制御装置 |
| JP269502/1999 | 1999-09-22 | ||
| JP31034699A JP3300312B2 (ja) | 1999-10-29 | 1999-10-29 | ハイブリッド車両の制御装置 |
| JP310346/1999 | 1999-10-29 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1294064A CN1294064A (zh) | 2001-05-09 |
| CN1138651C true CN1138651C (zh) | 2004-02-18 |
Family
ID=26548793
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB00135308XA Expired - Fee Related CN1138651C (zh) | 1999-09-22 | 2000-09-22 | 混合动力车辆的控制装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (2) | US6702052B1 (zh) |
| EP (1) | EP1086846B1 (zh) |
| KR (1) | KR100370675B1 (zh) |
| CN (1) | CN1138651C (zh) |
| AU (1) | AU750930B2 (zh) |
| CA (1) | CA2320003C (zh) |
| DE (1) | DE60037166T2 (zh) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100340443C (zh) * | 2004-04-15 | 2007-10-03 | 丰田自动车株式会社 | 混合动力车控制系统 |
| CN100377902C (zh) * | 2004-07-01 | 2008-04-02 | 丰田自动车株式会社 | 车用驱动系统的控制设备 |
| CN102673375A (zh) * | 2007-07-12 | 2012-09-19 | 本田技研工业株式会社 | 混合动力车辆的控制装置 |
Families Citing this family (85)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7252165B1 (en) * | 2000-04-26 | 2007-08-07 | Bowling Green State University | Hybrid electric vehicle |
| US7004273B1 (en) * | 2000-04-26 | 2006-02-28 | Robert Gruenwald | Hybrid electric vehicle |
| US7774108B2 (en) * | 2000-11-14 | 2010-08-10 | Honda Giken Kogyo Kabushiki Kaisha | Front and rear wheel drive vehicle |
| US20040174125A1 (en) * | 2000-12-27 | 2004-09-09 | Transportation Techniques Llc | Method and apparatus for adaptive control of hybrid electric vehicle components |
| DE10128758A1 (de) * | 2001-06-13 | 2002-12-19 | Bosch Gmbh Robert | Verfahren und Einrichtung zur Ansteuerung eines Hybridfahrzeugs |
| JP3827980B2 (ja) * | 2001-09-21 | 2006-09-27 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| US6917179B2 (en) | 2001-10-25 | 2005-07-12 | Toyota Jidosha Kabushiki Kaisha | Load driver and control method for safely driving DC load and computer-readable recording medium with program recorded thereon for allowing computer to execute the control |
| JP3918552B2 (ja) * | 2001-12-26 | 2007-05-23 | アイシン・エィ・ダブリュ株式会社 | 電動車両駆動制御装置、電動車両駆動制御方法及びそのプログラム |
| JP3466600B1 (ja) * | 2002-07-16 | 2003-11-10 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| JP3866202B2 (ja) * | 2003-01-22 | 2007-01-10 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| JP3661689B2 (ja) * | 2003-03-11 | 2005-06-15 | トヨタ自動車株式会社 | モータ駆動装置、それを備えるハイブリッド車駆動装置、モータ駆動装置の制御をコンピュータに実行させるプログラムを記録したコンピュータ読取り可能な記録媒体 |
| DE10346213A1 (de) * | 2003-10-06 | 2005-04-21 | Bosch Gmbh Robert | Verfahren zur Regelung des Ladezustands eines Energiespeichers bei einem Fahrzeug mit Hybridantrieb |
| US7301304B2 (en) * | 2004-02-14 | 2007-11-27 | General Motors Corporation | Energy storage system state of charge diagnostic |
| US7427156B2 (en) * | 2004-12-20 | 2008-09-23 | Odyne Corporation | Thermally managed battery enclosure for electric and hybrid electric vehicles |
| US7471066B2 (en) * | 2004-12-22 | 2008-12-30 | Odyne Corporation | Battery management and equalization system for batteries using power line carrier communications |
| US7830117B2 (en) | 2005-01-10 | 2010-11-09 | Odyne Systems, Llc | Vehicle charging, monitoring and control systems for electric and hybrid electric vehicles |
| US7665557B2 (en) | 2005-06-16 | 2010-02-23 | Eaton Corporation | Hybrid electric powertrain with anti-idle function |
| JP4192939B2 (ja) * | 2005-10-21 | 2008-12-10 | トヨタ自動車株式会社 | ハイブリッド動力装置 |
| JP2007245805A (ja) * | 2006-03-14 | 2007-09-27 | Mitsubishi Fuso Truck & Bus Corp | ハイブリッド電気自動車の制御装置 |
| JP2007315247A (ja) * | 2006-05-24 | 2007-12-06 | Hitachi Ltd | エンジン制御装置 |
| US8217599B2 (en) * | 2006-06-29 | 2012-07-10 | Mitsubishi Electric Corporation | Regenerative braking apparatus |
| JP4755039B2 (ja) * | 2006-07-25 | 2011-08-24 | ヤマハ発動機株式会社 | ハイブリッド式自動二輪車 |
| JP4755048B2 (ja) * | 2006-08-10 | 2011-08-24 | ヤマハ発動機株式会社 | ハイブリッド式自動二輪車 |
| DE102006034933B4 (de) * | 2006-07-28 | 2016-10-06 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | Verfahren und Vorrichtung zur Steuerung eines Hybrid-Fahrzeugantriebs |
| JP4811301B2 (ja) * | 2007-03-06 | 2011-11-09 | トヨタ自動車株式会社 | 二次電池の入出力制御装置、および車両 |
| US9061680B2 (en) | 2007-07-12 | 2015-06-23 | Odyne Systems, Llc | Hybrid vehicle drive system and method for fuel reduction during idle |
| US9283954B2 (en) | 2007-07-12 | 2016-03-15 | Odyne Systems, Llc | System for and method of fuel optimization in a hybrid vehicle |
| US8978798B2 (en) * | 2007-10-12 | 2015-03-17 | Odyne Systems, Llc | Hybrid vehicle drive system and method and idle reduction system and method |
| US8408341B2 (en) | 2007-07-12 | 2013-04-02 | Odyne Systems, Llc | Hybrid vehicle drive system and method and idle reduction system and method |
| US20120207620A1 (en) | 2007-07-12 | 2012-08-16 | Odyne Systems, LLC. | Hybrid vehicle drive system and method and idle reduction system and method |
| US8818588B2 (en) * | 2007-07-12 | 2014-08-26 | Odyne Systems, Llc | Parallel hybrid drive system utilizing power take off connection as transfer for a secondary energy source |
| US9878616B2 (en) | 2007-07-12 | 2018-01-30 | Power Technology Holdings Llc | Hybrid vehicle drive system and method using split shaft power take off |
| CN101590817B (zh) * | 2007-08-13 | 2012-07-11 | 通用汽车环球科技运作公司 | 用于混合动力车辆的电池控制方法 |
| US8135532B2 (en) * | 2007-11-04 | 2012-03-13 | GM Global Technology Operations LLC | Method for controlling output power of an energy storage device in a powertrain system |
| US8190318B2 (en) * | 2008-04-15 | 2012-05-29 | The Uwm Research Foundation, Inc. | Power management systems and methods in a hybrid vehicle |
| JP4386138B1 (ja) * | 2008-06-27 | 2009-12-16 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置および制御方法 |
| FR2933355B1 (fr) * | 2008-07-03 | 2010-09-03 | Peugeot Citroen Automobiles Sa | Procede et systeme de stockage d'une charge electrique |
| US8755960B2 (en) * | 2009-05-14 | 2014-06-17 | GM Global Technology Operations LLC | Method for managing battery power within a hybrid powertrain system |
| MX2012003116A (es) | 2009-09-15 | 2012-06-19 | Kpit Cummins Infosystems Ltd | Asistencia a motor para un vehiculo hibrido a base de entrada de usuario. |
| BR112012005362A2 (pt) | 2009-09-15 | 2020-09-15 | Kpit Cummins Infosystems Ltd. | Método de fornecimentos de assistência ao motor de um veículo híbrido baseadana faixa de propulsâo prevista |
| WO2011039770A2 (en) | 2009-09-15 | 2011-04-07 | Kpit Cummins Infosystems Ltd. | Method of converting vehicle into hybrid vehicle |
| WO2011033528A2 (en) | 2009-09-15 | 2011-03-24 | Kpit Cummins Infosystems Limited | Motor assistance for a hybrid vehicle |
| EP2308708B1 (de) * | 2009-09-16 | 2016-08-17 | swissauto powersport llc | Elektrofahrzeug mit Reichweitenverlängerung |
| US9187083B2 (en) | 2009-09-16 | 2015-11-17 | Polaris Industries Inc. | System and method for charging an on-board battery of an electric vehicle |
| CN102035048B (zh) * | 2009-09-27 | 2013-03-20 | 苏州益高电动车辆制造有限公司 | 蓄电池保护器 |
| JP5507284B2 (ja) | 2010-02-17 | 2014-05-28 | 富士重工業株式会社 | 電気自動車の制御装置 |
| CN102883932A (zh) * | 2010-04-27 | 2013-01-16 | 丰田自动车株式会社 | 车辆的控制装置 |
| US9352739B2 (en) * | 2011-02-15 | 2016-05-31 | GM Global Technology Operations LLC | Method for operating a hybrid vehicle |
| JPWO2012131864A1 (ja) * | 2011-03-28 | 2014-07-24 | トヨタ自動車株式会社 | 電動車両およびその制御方法 |
| US11225240B2 (en) | 2011-12-02 | 2022-01-18 | Power Technology Holdings, Llc | Hybrid vehicle drive system and method for fuel reduction during idle |
| KR101664156B1 (ko) * | 2011-12-13 | 2016-10-10 | 현대자동차 주식회사 | 하이브리드 자동차의 배터리 충방전 제어방법 |
| RU2570996C1 (ru) * | 2012-01-24 | 2015-12-20 | Тойота Дзидося Кабусики Кайся | Устройство управления транспортным средством, транспортное средство и способ управления транспортным средством |
| US8712620B2 (en) * | 2012-03-24 | 2014-04-29 | Emmanuel Jackson | Vehicles with electric motor |
| KR101711799B1 (ko) * | 2013-10-02 | 2017-03-02 | 미쓰비시덴키 가부시키가이샤 | 교류 모터 구동 시스템 |
| EP3071438A4 (en) | 2013-11-18 | 2017-08-02 | Power Technology Holdings LLC | Hybrid vehicle drive system and method using split shaft power take off |
| US9278684B2 (en) * | 2014-02-24 | 2016-03-08 | GM Global Technology Operations LLC | Method and system for controlling a hybrid vehicle |
| GB2527515B (en) | 2014-06-23 | 2018-11-14 | Jaguar Land Rover Ltd | Control system for hybrid vehicle and method |
| US10569638B2 (en) * | 2014-06-25 | 2020-02-25 | Heinz Welschoff | All electric vehicle without plug-in requirement |
| US20150375612A1 (en) * | 2014-06-25 | 2015-12-31 | Heinz Welschoff | All electric vehicle without plug-in requirement |
| US10300786B2 (en) | 2014-12-19 | 2019-05-28 | Polaris Industries Inc. | Utility vehicle |
| JP6476936B2 (ja) * | 2015-02-02 | 2019-03-06 | スズキ株式会社 | 駆動制御装置 |
| US9610948B2 (en) * | 2015-03-04 | 2017-04-04 | General Electric Company | Movement detection system and method |
| CN105277909B (zh) * | 2015-11-10 | 2018-06-12 | 湖南南车时代电动汽车股份有限公司 | 混合动力功率电池soc校准方法 |
| US10029673B2 (en) | 2016-04-20 | 2018-07-24 | Ford Global Technologies, Llc | Speed limiting of altitude compensation for target engine speed in hybrid electric vehicles |
| CA3027367C (en) | 2016-06-14 | 2021-12-14 | Polaris Industries, Inc. | Hybrid utility vehicle |
| KR102608464B1 (ko) * | 2016-10-05 | 2023-12-01 | 삼성전자주식회사 | 배터리를 관리하는 방법 및 장치 |
| KR102512995B1 (ko) * | 2017-11-02 | 2023-03-22 | 현대자동차주식회사 | 배터리 관리 장치, 그를 가지는 차량 및 그 제어 방법 |
| JP6620390B2 (ja) * | 2017-12-21 | 2019-12-18 | 本田技研工業株式会社 | 電動車両 |
| CN108189708B (zh) * | 2017-12-28 | 2022-02-01 | 深圳市布谷鸟科技有限公司 | 一种联合控制电动汽车电机的方法 |
| JP6621489B2 (ja) * | 2018-02-16 | 2019-12-18 | 本田技研工業株式会社 | 燃料電池システム |
| CN108501936B (zh) * | 2018-03-28 | 2020-07-07 | 吉利汽车研究院(宁波)有限公司 | 汽车的扭矩分配方法、装置及电子设备 |
| US10780770B2 (en) | 2018-10-05 | 2020-09-22 | Polaris Industries Inc. | Hybrid utility vehicle |
| IT201800009968A1 (it) * | 2018-10-31 | 2020-05-01 | Piaggio & C Spa | Dispositivo di alimentazione e controllo di un veicolo elettrico |
| CN109747765B (zh) * | 2018-12-12 | 2022-05-20 | 天津爱玛车业科技有限公司 | 电动车智能动力控制方法和装置 |
| US11110800B2 (en) * | 2019-04-04 | 2021-09-07 | Ford Global Technologies, Llc | Method for auxiliary load control |
| JP7115409B2 (ja) * | 2019-04-19 | 2022-08-09 | トヨタ自動車株式会社 | 駆動システムの制御装置 |
| US11370266B2 (en) | 2019-05-16 | 2022-06-28 | Polaris Industries Inc. | Hybrid utility vehicle |
| CN112440744B (zh) * | 2019-08-29 | 2022-05-17 | 北京新能源汽车股份有限公司 | 一种蓄电池电量管理的控制方法、整车控制器及管理系统 |
| JP7112996B2 (ja) * | 2019-09-17 | 2022-08-04 | 日立建機株式会社 | 作業機械 |
| JP7409905B2 (ja) * | 2020-02-28 | 2024-01-09 | 株式会社シマノ | 人力駆動車用制御装置 |
| CN112744088B (zh) * | 2020-06-09 | 2023-04-25 | 长城汽车股份有限公司 | 驾驶模式控制方法和装置 |
| JP7179047B2 (ja) * | 2020-12-28 | 2022-11-28 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| JP7240430B2 (ja) * | 2021-03-08 | 2023-03-15 | 本田技研工業株式会社 | 車両の制御装置 |
| CN114643986B (zh) * | 2022-04-11 | 2024-09-10 | 合肥工业大学 | 一种电动汽车自适应巡航与再生制动的协同控制方法 |
| CN116691642B (zh) * | 2023-08-07 | 2023-10-27 | 成都赛力斯科技有限公司 | 混合动力车辆扭矩设置方法、装置及混合动力车辆 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5659240A (en) * | 1995-02-16 | 1997-08-19 | General Electric Company | Intelligent battery charger for electric drive system batteries |
| US5847520A (en) * | 1996-01-05 | 1998-12-08 | Smh Management Services Ag | Method and apparatus for adjusting the electric power distribution in a motor vehicle, in patricular a hybrid-powered vehicle |
| EP0901930A1 (en) * | 1997-09-15 | 1999-03-17 | Honda Giken Kogyo Kabushiki Kaisha | Controlling apparatus for a hybrid car |
| JPH1193722A (ja) * | 1997-09-17 | 1999-04-06 | Honda Motor Co Ltd | ハイブリッド車両の制御装置 |
| CN1222461A (zh) * | 1997-11-12 | 1999-07-14 | 丰田自动车株式会社 | 动力输出装置及控制该动力输出装置的方法 |
| CN1228540A (zh) * | 1997-12-26 | 1999-09-15 | 三星电子株式会社 | 精确测定电池剩余容量的装置和方法 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5045239A (zh) | 1973-08-28 | 1975-04-23 | ||
| JPS55127221A (en) * | 1979-03-20 | 1980-10-01 | Daihatsu Motor Co Ltd | Driving system of vehicle |
| US4407132A (en) * | 1980-02-20 | 1983-10-04 | Daihatsu Motor Co., Ltd. | Control apparatus and method for engine/electric hybrid vehicle |
| US5285862A (en) * | 1992-03-16 | 1994-02-15 | Toyota Jidosha Kabushiki Kaisha | Power supply system for hybrid vehicles |
| US5264764A (en) * | 1992-12-21 | 1993-11-23 | Ford Motor Company | Method for controlling the operation of a range extender for a hybrid electric vehicle |
| JP3285727B2 (ja) | 1995-02-13 | 2002-05-27 | 株式会社東芝 | ハイブリッドカーの制御装置 |
| JPH08289407A (ja) * | 1995-02-13 | 1996-11-01 | Nippon Soken Inc | ハイブリッド車の発電制御装置 |
| JP3534271B2 (ja) * | 1995-04-20 | 2004-06-07 | 株式会社エクォス・リサーチ | ハイブリッド車両 |
| JP3447433B2 (ja) | 1995-05-18 | 2003-09-16 | 株式会社エクォス・リサーチ | ハイブリッド車両 |
| US5842534A (en) * | 1995-05-31 | 1998-12-01 | Frank; Andrew A. | Charge depletion control method and apparatus for hybrid powered vehicles |
| JP3608017B2 (ja) * | 1996-07-22 | 2005-01-05 | トヨタ自動車株式会社 | 電源システム |
| DE69621759T2 (de) * | 1995-12-27 | 2003-02-06 | Denso Corp | Stromversorgungssteuervorrichtung für ein Hybrid-Fahrzeug |
| KR100471551B1 (ko) * | 1996-05-24 | 2005-04-14 | 히노지도샤코교 가부시기가이샤 | 차재전지의제어장치 |
| JP3536581B2 (ja) | 1997-04-16 | 2004-06-14 | 日産自動車株式会社 | ハイブリッド電気自動車の発電制御装置 |
| US6157169A (en) * | 1997-04-30 | 2000-12-05 | Samsung Electronics Co., Ltd. | Monitoring technique for accurately determining residual capacity of a battery |
| JP3555396B2 (ja) | 1997-08-06 | 2004-08-18 | トヨタ自動車株式会社 | ハイブリッド車両の発電制御装置 |
| JP3447937B2 (ja) | 1997-11-18 | 2003-09-16 | 本田技研工業株式会社 | ハイブリッド車両 |
| US6116368A (en) * | 1997-11-21 | 2000-09-12 | Lockheed Martin Corp. | Electric vehicle with battery regeneration dependent on battery charge state |
| US6209672B1 (en) * | 1998-09-14 | 2001-04-03 | Paice Corporation | Hybrid vehicle |
| JP3300295B2 (ja) * | 1998-12-07 | 2002-07-08 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| JP3073975B1 (ja) * | 1999-02-03 | 2000-08-07 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| JP3682685B2 (ja) * | 1999-03-10 | 2005-08-10 | スズキ株式会社 | 車両推進装置の制御装置 |
| JP2001268719A (ja) * | 2000-03-23 | 2001-09-28 | Toyota Motor Corp | ハイブリッド車両のバッテリ充電制御装置 |
-
2000
- 2000-09-20 US US09/665,677 patent/US6702052B1/en not_active Expired - Fee Related
- 2000-09-20 CA CA002320003A patent/CA2320003C/en not_active Expired - Fee Related
- 2000-09-22 AU AU61252/00A patent/AU750930B2/en not_active Ceased
- 2000-09-22 EP EP00120770A patent/EP1086846B1/en not_active Expired - Lifetime
- 2000-09-22 KR KR10-2000-0055762A patent/KR100370675B1/ko not_active IP Right Cessation
- 2000-09-22 CN CNB00135308XA patent/CN1138651C/zh not_active Expired - Fee Related
- 2000-09-22 DE DE60037166T patent/DE60037166T2/de not_active Expired - Lifetime
-
2002
- 2002-04-17 US US10/123,137 patent/US6907948B2/en not_active Expired - Lifetime
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5659240A (en) * | 1995-02-16 | 1997-08-19 | General Electric Company | Intelligent battery charger for electric drive system batteries |
| US5847520A (en) * | 1996-01-05 | 1998-12-08 | Smh Management Services Ag | Method and apparatus for adjusting the electric power distribution in a motor vehicle, in patricular a hybrid-powered vehicle |
| EP0901930A1 (en) * | 1997-09-15 | 1999-03-17 | Honda Giken Kogyo Kabushiki Kaisha | Controlling apparatus for a hybrid car |
| JPH1193722A (ja) * | 1997-09-17 | 1999-04-06 | Honda Motor Co Ltd | ハイブリッド車両の制御装置 |
| CN1222461A (zh) * | 1997-11-12 | 1999-07-14 | 丰田自动车株式会社 | 动力输出装置及控制该动力输出装置的方法 |
| CN1228540A (zh) * | 1997-12-26 | 1999-09-15 | 三星电子株式会社 | 精确测定电池剩余容量的装置和方法 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100340443C (zh) * | 2004-04-15 | 2007-10-03 | 丰田自动车株式会社 | 混合动力车控制系统 |
| CN100377902C (zh) * | 2004-07-01 | 2008-04-02 | 丰田自动车株式会社 | 车用驱动系统的控制设备 |
| CN102673375A (zh) * | 2007-07-12 | 2012-09-19 | 本田技研工业株式会社 | 混合动力车辆的控制装置 |
| CN102673375B (zh) * | 2007-07-12 | 2015-01-14 | 本田技研工业株式会社 | 混合动力车辆的控制装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1086846A3 (en) | 2004-01-02 |
| US6907948B2 (en) | 2005-06-21 |
| AU750930B2 (en) | 2002-08-01 |
| CA2320003C (en) | 2006-03-21 |
| US6702052B1 (en) | 2004-03-09 |
| DE60037166D1 (de) | 2008-01-03 |
| CA2320003A1 (en) | 2001-03-22 |
| CN1294064A (zh) | 2001-05-09 |
| KR100370675B1 (ko) | 2003-02-05 |
| EP1086846B1 (en) | 2007-11-21 |
| AU6125200A (en) | 2001-04-26 |
| US20020108794A1 (en) | 2002-08-15 |
| KR20010050589A (ko) | 2001-06-15 |
| EP1086846A2 (en) | 2001-03-28 |
| DE60037166T2 (de) | 2008-03-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1138651C (zh) | 混合动力车辆的控制装置 | |
| CN1291857C (zh) | 混合动力车辆的控制装置 | |
| CN1240566C (zh) | 混合型动力汽车的助推控制装置 | |
| CN101062685A (zh) | 车辆用行驶控制装置 | |
| CN1251899C (zh) | 用于混合车辆的控制装置 | |
| CN1241767C (zh) | 混合式动力车的控制设备 | |
| CN1093803C (zh) | 混合型车用控制装置 | |
| CN1251903C (zh) | 混合驱动车辆的控制装置 | |
| CN1134588C (zh) | 发动机自动启动停止控制的设备和方法 | |
| CN1121954C (zh) | 用于混合车辆的控制系统 | |
| CN1428256A (zh) | 混合驱动式车辆的运行控制装置及其车辆 | |
| CN1944134A (zh) | 混合动力车辆的发动机启动控制装置 | |
| CN1232414C (zh) | 混合车辆的控制装置 | |
| CN1121953C (zh) | 混合动力车辆的控制装置 | |
| CN1230321C (zh) | 通过电动机转矩制动的车辆和控制车辆的方法 | |
| CN1486880A (zh) | 车辆驱动力控制装置 | |
| CN1460077A (zh) | 汽车控制系统和控制方法 | |
| CN1289334C (zh) | 车辆驱动力控制装置 | |
| CN1748359A (zh) | 电机驱动设备、使用该设备的混合动力车驱动设备及记录有用于使计算机对电机驱动设备进行控制的程序的计算机可读记录介质 | |
| CN1336879A (zh) | 动力输出装置、混合车辆及其控制方法 | |
| CN1055895C (zh) | 动力传送装置及采用该装置的四轮驱动车辆以及动力传送方法及四轮驱动方法 | |
| CN1681679A (zh) | 综合驱动控制系统和综合驱动控制方法 | |
| CN1495063A (zh) | 车辆驱动力控制设备 | |
| CN1371821A (zh) | 用于混合动力型车辆的控制装置 | |
| CN1911705A (zh) | 用于车辆的电源装置及其控制方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| BB1A | Publication of application | ||
| C06 | Publication | ||
| PB01 | Publication | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C17 | Cessation of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20040218 Termination date: 20120922 |