CN1241767C - 混合式动力车的控制设备 - Google Patents
混合式动力车的控制设备 Download PDFInfo
- Publication number
- CN1241767C CN1241767C CNB02103396XA CN02103396A CN1241767C CN 1241767 C CN1241767 C CN 1241767C CN B02103396X A CNB02103396X A CN B02103396XA CN 02103396 A CN02103396 A CN 02103396A CN 1241767 C CN1241767 C CN 1241767C
- Authority
- CN
- China
- Prior art keywords
- situation
- under
- cutting
- cylinder
- flow process
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L7/00—Electrodynamic brake systems for vehicles in general
- B60L7/10—Dynamic electric regenerative braking
- B60L7/18—Controlling the braking effect
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/40—Controlling the engagement or disengagement of prime movers, e.g. for transition between prime movers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/48—Parallel type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/24—Conjoint control of vehicle sub-units of different type or different function including control of energy storage means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F01—MACHINES OR ENGINES IN GENERAL; ENGINE PLANTS IN GENERAL; STEAM ENGINES
- F01L—CYCLICALLY OPERATING VALVES FOR MACHINES OR ENGINES
- F01L13/00—Modifications of valve-gear to facilitate reversing, braking, starting, changing compression ratio, or other specific operations
- F01L13/0005—Deactivating valves
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F01—MACHINES OR ENGINES IN GENERAL; ENGINE PLANTS IN GENERAL; STEAM ENGINES
- F01L—CYCLICALLY OPERATING VALVES FOR MACHINES OR ENGINES
- F01L13/00—Modifications of valve-gear to facilitate reversing, braking, starting, changing compression ratio, or other specific operations
- F01L13/0015—Modifications of valve-gear to facilitate reversing, braking, starting, changing compression ratio, or other specific operations for optimising engine performances by modifying valve lift according to various working parameters, e.g. rotational speed, load, torque
- F01L13/0036—Modifications of valve-gear to facilitate reversing, braking, starting, changing compression ratio, or other specific operations for optimising engine performances by modifying valve lift according to various working parameters, e.g. rotational speed, load, torque the valves being driven by two or more cams with different shape, size or timing or a single cam profiled in axial and radial direction
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D17/00—Controlling engines by cutting out individual cylinders; Rendering engines inoperative or idling
- F02D17/02—Cutting-out
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/008—Controlling each cylinder individually
- F02D41/0087—Selective cylinder activation, i.e. partial cylinder operation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/04—Introducing corrections for particular operating conditions
- F02D41/12—Introducing corrections for particular operating conditions for deceleration
- F02D41/123—Introducing corrections for particular operating conditions for deceleration the fuel injection being cut-off
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/44—Drive Train control parameters related to combustion engines
- B60L2240/441—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0638—Engine speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0671—Engine manifold pressure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/18—Braking system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
- B60W2710/0616—Position of fuel or air injector
- B60W2710/0633—Inlet air flow rate
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
- B60W2710/0644—Engine speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/0002—Controlling intake air
- F02D2041/001—Controlling intake air for engines with variable valve actuation
- F02D2041/0012—Controlling intake air for engines with variable valve actuation with selective deactivation of cylinders
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/40—Engine management systems
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Combustion & Propulsion (AREA)
- Chemical & Material Sciences (AREA)
- General Engineering & Computer Science (AREA)
- Transportation (AREA)
- Power Engineering (AREA)
- Automation & Control Theory (AREA)
- Output Control And Ontrol Of Special Type Engine (AREA)
- Hybrid Electric Vehicles (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Electrical Control Of Air Or Fuel Supplied To Internal-Combustion Engine (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
本发明提供了混合式动力车的控制设备,用于在减速时产生适量的再生能。混合式动力车的控制设备包括用于驱动该混合式动力车的发动机和电动机,其中发动机包括能够进行休缸操作的汽缸,且在车辆减速时电动机执行再生制动。本发明的控制设备包括休缸判断装置,用于判断车辆速度是否适于执行休缸操作,再生量计算装置,用于检测车辆状态是否适于再生并计算再生量;并进而包括补偿量计算装置,该装置基于所有汽缸休缸操作和发动机转速而补偿再生量。
Description
技术领域
本发明涉及混合式动力车的控制系统,并特别涉及能够保证减速期间适量再生的休缸型(deactivating type)混合式动力车。
背景技术
通常所知道的混合式动力车,除了发动机之外还带有电动机作为驱动车辆的动力源。有两种类型的混合式动力车,其中一种是并行混合式动力车,其发动机的输出由电动机辅助。
这种并行混合式动力车在加速时通过一电动机辅助发动机的输出,并执行由减速期间的再生制动进行诸如蓄电池充电等各种控制,并同时保证蓄电池的剩余电量(电能),从而能够满足驾驶者的需求。此外,因为结构上形成配置发动机和电动机在一直列的机构,因而有这样的优点,即是可简化结构且系统的总重量可做得小,于是在车辆中安装的自由度高。
其中,在这种并行的混合式动力车中,知道为了消除在再生制动期间发动机摩擦(发动机制动)的影响,在发动机和电动机之间装有离合器的一种结构(例如参见日本未审专利申请,第一公报,No.2000-97068),并还知道一种结构,其中发动机、电动机和变速器是串联连接的,以便实现极为简单的结构(例如参见日本未审专利申请,第一公报,No.2000-125405)。
然而,如上所述,在发动机和电动机之间装设离合器的前一个结构的缺点在于,由于装设离合器而导致与结构相关的复杂化,并使可安装性不良,并同时,即使是在行进期间由于使用离合器而降低了变速器系统的传动效率。反之,后一种结构中,发动机、电动机和变速器串联连接降低了等于上述发动机的摩擦量的再生制动量,因而存在这样的问题,即能够通过再生保证的电能变小,因而电动机提供的辅助量受到限制。
此外,在前一类型中,作为降低减速期间发动机摩擦的手段,有一种方法是使用电控节气门机构在减速期间控制打开侧的节气阀,这样通过大大降低泵气损而增加再生量。然而,因为在减速期间新鲜的空气按其原来状态大量流入排气系统,就有这样的问题,即催化剂与A/F传感器的温度降低,且这对于排气的最优控制有不良作用。
发明内容
于是,本发明的目的是提供用于混合式动力车的一种控制系统,该系统通过使所有的汽缸休缸操作,改进了燃油的耗量,其减少量相当于发动机摩擦的降低,并同时保证了减速期间最优的再生量。
在本发明的第一方面,一种用于混合式动力车的控制设备提供了一种发动机(例如,实施例中的发动机E)及电动机(例如,实施例中的电动机M)作为该车辆的驱动力,并根据车辆减速期间的减速状态由电动机进行再生控制,该控制设备的特征在于,发动机是能够使汽缸休缸的发动机,并装有根据车辆操作条件判断休缸是否可行的休缸判断装置(例如,实施例中的所有汽缸休缸执行标志F_ALCS),还装有检测车辆的减速状态并计算减速期间由电动机产生的再生量的再生量计算装置(例如,实施例中的步骤S255);并且其进一步的特征在于,再生量计算装置装有补偿量计算装置(例如,实施例中的步骤S309),在由电动机进行的减速再生期间休缸判断装置判断可执行休缸的情形下,该装置基于按发动机转速(例如,实施例中的发动机转速NE)计算出的补偿量(例如,实施例中的所有汽缸休缸再生操作值CSRGN)而补偿再生量;并且进一步的特征在于,电动机基于再生量计算装置和补偿量计算装置,按再生量执行再生。
有了这种类型的结构,通过补偿量计算装置计算由休缸所降低的发动机摩擦的减少部分而能够进行再生,并通过增加由再生量计算装置计算的再生量,按相当于这一补偿量的量(再生的增加部分),进行再生。
本发明第二方面的特征在于,提供了用于混合式动力车的一种控制设备,其中燃油供给停止装置(例如,实施例中的步骤S212)在车辆减速期间停止向发动机的燃油供给。
有了这种类型的结构,除了通过进行休缸能够增加再生量之外,还能够抑制燃油的消耗量。
本发明第三方面的特征在于,在经过了与车辆速度(例如,实施例中的步骤S257)相关的预定时间段之后,由补偿量计算装置进行的再生量的补偿是逐步进行的(例如,实施例中的步骤S261和S265)。
这样,根据车速设置与车速相关的预定时间,增加了设置的自由度。此外,在进入减速模式的情形下以及在离开减速模式的情形下,通过逐步进行再生量的补偿,能够实现平滑的过渡。
本发明第四方面的特征在于,补偿量计算装置装有进气负压补偿装置(例如,实施例中的步骤S311),该装置根据休缸判断装置的休缸执行与休缸释放期间发动机的进气负压进行补偿。
有了这种结构,能够按在正常操作与休缸操作之间变化的进气管负压进行补偿。
本发明第五方面的特征在于,变速箱的变速比(例如,实施例中的CVT)是这样变化的,在休缸判断装置判断休缸可行的情形下,增加变速箱输入侧的变速比,且发动机转速增加。
有了这种结构,通过增加发动机转速可保证对应于因休缸已经降低的发动机摩擦的再生能。
附图说明
图1是表示实施例的并行混合式动力车的概念结构图。
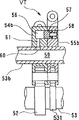
图2产表示实施例的可变阀定时机构的前视图。
图3A和3B表示实施例的可变阀定时机构,其中图3A是所有汽缸激活驱动状态期间可变阀定时机构主要部件的剖视图,图3B是在无汽缸驱动状态期间可变阀定时机构主要部件的剖视图。
图4是表示实施例的MA(电动机)基本模式的流程图。
图5是表示实施例的MA(电动机)基本模式的流程图。
图6是表示实施例的无汽缸驱动切换执行的处理过程的流程图。
图7是表示实施例的无汽缸驱动先决条件实现判断处理过程的流程图。
图8是表示实施例的无汽缸释放条件判断处理过程的流程图。
图9是表示实施例的燃油切断执行判断处理过程的流程图。
图10是实施例的减速模式的流程图。
图11是实施例的减速模式的流程图。
图12实施例的目标再生量计算的流程图。
图13是表示步骤S309的表格的曲线图。
图14是表示步骤S311的表格的曲线图。
图15是表示根据本发明的实施例在CVT车辆中发动机转速增加判断处理过程的流程图。
图16是表示根据本发明的实施例,在CVT车辆中车辆速度VP与发动机转速NE数之间的关系的曲线图。
图17是根据本发明实施例的时序图。
具体实施方式
以下将参照附图对本发明的实施例进行说明。
图1表示根据本发明实施例的并行混合式动力车,其结构为发动机E、电动机M与变速器T串联结合。发动机与电动机的驱动力,通过包括自动变速器或手动变速器的变速器,都被传送到前驱动轮Wf和Wf。此外,在混合式动力车减速期间,当驱动力从前轮Wf和WF侧传送到电动机M侧时,电动机M作为发电机而工作并产生所谓再生制动力,而车体的动能被回收为电能。这里,Wr表示后轮。
电动机M的驱动与再生动作由接收来自电动机ECU 1的控制命令的动力驱动单元2进行。电动机M和提供并接收电能的高压蓄电池连接到动力驱动单元2,并在蓄电池3中,例如串联多个电池元的单元模块再被串联到多个模块。在混合式动力车中,用于驱动各类装置的12伏特的辅助蓄电池4安装在混合式发动机中,且这一辅助蓄电池4通过下变换器5连接到蓄电池3。在蓄电池3的电压逐步降低之后,由FIECU 11控制的下变换器5对辅助蓄电池充电。
除了电动机ECU 1和下变换器5之外,FIECU 11除了点火定时等之外,还进行燃油供给量控制装置6的操作以及起动机电动机7的操作,装置6控制对发动机E的燃油供给量。因此,FIECU 11输入:来自基于机器的驱动轴转速数检测车速V的车速传感器S1的信号;来自检测发动机转数NE的发动机转速传感器S2的信号,来自检测变速器T档位的位置传感器S3的信号;来自检测制动踏板8操作的制动开关S4的信号;来自检测离合器踏板9操作的离合器开关S5的信号;来自检测节气门开度TH的节气门开度传感器S6信号,以及来自检测进气管负压PGBA的进气管负载荷传感器S7的信号。标号31标记蓄电池ECU,它维持蓄电池3并计算蓄电池3的剩余电荷QBAT。此外,图1中在CVT车辆的情形下,如虚线所示,装设了用于控制CVT的CVTECU 21。
BS标记与制动踏板8连接的助力器设备,并在助力器设备8中装有检测制动主力(MPGA)中的负压的传感器S8。
此外,这一负压传感器S8连接到发动机ECU 11。
这里,上述的发动机E是一种休缸发动机,这种发动机可自由地在所有汽缸被操作的所有汽缸激活操作(常规操作)与所有汽缸被禁止操作的所有汽缸休缸驱动操作之间切换。如图1中所示意表示,发动机E每一汽缸的进气阀IV与排气阀EV的结构使得其操作可由可变阀定时机构VT减活。这里,可变阀定时机构VT连接到发动机ECU 11。
以下将参照图1和图2对此具体说明。
图2表示把可变阀定时机构VT应用于单顶置式凸轮(SOHC)发动机所有汽缸休缸操作的一例。汽缸(未示出)装有进气阀IV和排气阀EV,进气阀IV和排气阀EV由阀弹簧51和51压紧在关闭进气和排气口(未示出)的方向。反之,标号52是装在凸轮轴53上的上举凸轮,而这一上举凸轮52与用于进气阀侧及排气阀侧凸轮上举的摇臂54a和54b连接,摇臂由进气阀侧及排气阀侧凸轮摇臂轴53a和53b可旋转支撑。
此外,用于凸轮上举的摇臂54a和54b紧靠在每一摇臂轴53a和53b,从而用于阀门驱动的摇臂55a和55b被可旋转支撑。此外,用于阀门驱动的摇臂55a和55b的旋转末端压迫进气阀IV和排气阀EV的上端,以此进行进气阀IV和排气阀EV的打开操作。此外,装在凸轮轴53上的圆形凸轮531在用于阀门驱动的摇臂55a和55b接近末端侧(与阀门结合部分相反侧)可滑动地形成。
图3是排气阀侧的一例,并示出用于凸轮上举的摇臂54b及用于阀驱动的摇臂55b。
图3A和图3B中,用于凸轮上举的摇臂54b及用于阀驱动的摇臂55b上,在排气阀侧的摇臂轴53b上中心形成油压腔56,它在用于凸轮上举的摇臂54b与用于阀驱动的摇臂之间在上举凸轮52的相对侧延伸。在油压腔56中,装有可自由滑动的销子57,而这一销子57由销子弹簧58向用于凸轮上举的摇臂54b压紧。
反之,在排气阀侧摇臂轴53b内部形成油压供给管59,而这一油压供给管59通过用于凸轮上举的摇臂54b的通路61与油压腔56连接。在这一油压供给管59中,通过切换作为至动器的滑阀SV,从油泵P供给工作油液。滑阀SV的螺线管连接到发动机ECU 11。
这里,如图3A所示,在来自油压供给管59的油压不起作用的情形下,销子57的位置是在销子弹簧58作用下跨在用于凸轮上举的摇臂54b及用于阀驱动的摇臂55b之间,并同时如图3B所示,在来自油压供给管59的油压因休缸信号而起作用的情形下,销子57反抗弹簧58的阻力滑向用于阀驱动的摇臂55b一侧,并且用于凸轮上举的摇臂54b及用于阀驱动的摇臂55b之间的连接被释放。此外,该结构对于进气阀侧是同样的。
因而,在满足以下所述所有汽缸休缸条件并且所有休缸汽缸释放条件没有达到的情形下,滑阀SV的螺线管由来自发动机ECU 11的信号转为ON,从而来自油压供给管59的油压腔56中的油压作用于进气阀侧和排气阀侧。因而,使用于凸轮上举的摇臂54a和54b及用于阀驱动的摇臂55a和55b成为一个整体的销子57和57滑向用于阀驱动的摇臂55a和55b,且用于凸轮上举的摇臂54a和54b及用于阀驱动的摇臂55a和55b之间的连接被释放。
这样,用于凸轮上举的摇臂54a和54b被上举凸轮52的旋转运动所驱动,但是用于阀驱动的摇臂55a和55b,由于与用于凸轮上举的摇臂54a和54b的连接已经被销子57释放,因而不被旋转凸轮531驱动,从而开阀IV和EV都不起作用。因而,每一阀门IV和EV保持关闭,且所有汽缸休缸操作成为可能。
MA(电动机)的基本模式
以下基于图4和图5的流程图,将说明确定以哪种方式操纵电动机M的MA(电动机)基本模式。
并且,这一处理过程是以预定的周期重复的。
这里,包含在MA(电动机)基本模式中的有“怠速模式”,“怠速停止模式”,“减速模式”,“巡航模式”,及“加速模式”。在怠速模式中,建议遵循燃油切断的供油,并且发动机E保持在怠速状态,而在怠速停止模式中,例如,发动机在不变条件下停止,同时车辆停止。此外,在减速模式中,由电动机M进行再生制动;在加速模式中,发动机E由电动机M辅助;而在巡航模式中,其中电动机M没有被驱动的车辆由于发动机E的驱动力而行使。在减速模式中,所有的汽缸被休缸。
在图4的步骤S051,确定MT/CVT判断标志F_AT是否为1。在判断结果为YES(CVT汽车)的情形下,流程进到步骤S060,而在判断结果为NO(MT车辆)的情形下,流程进到步骤S052。
在步骤S060,确定CVT啮合判断标志F_ATNP是否为1,在判断结果为YES(N,P范围)的情形下,流程进到步骤S083,而在判断结果为NO(啮合)的情形下,流程进到步骤S060A。
在步骤S060A,通过开关返回标志F_VSWB是否为1而确定开关返回是否有效(在变速杆操作期间不能确定档位)。在判断结果为YES(开关返回期间)的情形下,流程进到步骤S085,移动到“怠速模式”,并完成控制。在怠速模式中,发动机E保持在怠速状态。而在步骤S060A判断结果为NO(不是开关返回期间)的情形下,流程进到步骤S053A。
在步骤S083,确定发动机停止控制执行标志F_FCMG是否为1。在步骤S083的判断结果为NO的情形下,在步骤S085发动机移动到“怠速模式”,且控制结束。在步骤S083的判断结果为YES的情形下,流程进到步骤S084,发动机进入“怠速停止模式”,且控制结束。例如,在怠速停止模式中,发动机在不变条件下停止,而车辆被停止等。
在步骤S052,确定空挡位置判断标志F_NSW是否为1。在判断结果为YES(空挡位置)的情形下,流程进到步骤S083,并在判断结果为NO(啮合)的情形下,流程进到步骤S053。
在步骤S053,确定离合器连接判断标志F_CLSW是否为1。在判断响应为YES(离合器不连接)的情形下,流程进到步骤S083,并在判断结果为NO(离合器连接)的情形下,流程进到步骤S053A。
在步骤S053A,确定剩余蓄电池容量QBAT是否等于或大于低速推进判断剩余容量QBJAM。在判断结果为YES的情形下,流程进到步骤S054,并在判断结果为NO的情形下,流程进到步骤S053。
在步骤S053B,确定低速推进判断标志F_JAMST是否为1。这一低速推进判断标志F_JAMST是在以低速推进的停止-及-行车驱动及不增加速度的情形下所取的标志。在步骤S053B的判断结果为YES的情形下,流程进到步骤S083。在判断结果为NO的情形下,流程进到步骤S054。特别地,在蓄电池剩余电量低并发生停止-和-行车驱动的情形下,怠速模式或怠速停止模式(在上述发动机停止判断期间,怠速或停止发动机期间的发电)最好也是没有加速意图的传感度,从而保护蓄电池。
在步骤S054,确定IDLE判断标志F_THIDLMG是否为1。在判断结果为NO(完全关闭)的情形下,流程进到步骤S061,并在判断结果为YES(非完全关闭)的情形下,流程进到步骤S054A。
在步骤S054A,在半-啮合离合器判断期间的发动机转速增加标志F_NERGNUP被设置为0,且流程进到步骤S055。此外,将在以下说明在半-啮合离合器判断期间的发动机转速增加标志F_NERGNUP。
在步骤S055,确定电动机辅助判断标志F_MAST是否为1。这一标志是确定发动机是否应当由电动机M辅助的标志。该标志为1的情形的意义是需要辅助,而为0的情形的意义是不需要辅助。此外,辅助触发判断处理过程设置这一电动机辅助判断标志。
当步骤S055的判断为“NO”时,流程进到步骤S061。在步骤S055的判断结果为YES的情形下,流程进到步骤S056。
在步骤S061,确定MT/CVT判断标志F_AT是否为1。在判断结果为NO(MT车辆)的情形下,流程进到步骤S063。在判断结果为YES(CVT车辆)的情形下,流程进到步骤S062。
在步骤S062,确定倒挡位判断标志F_ATPR是否为1。在判断结果为YES(倒挡位)的情形下,流程进到步骤S085,而在判断结果为NO(倒挡位以外)的情形下,流程进到步骤S063。
在步骤S056,确定MT/CVT判断标志F_AT是否为1。在判断结果为YES(CVT车辆)的情形下,流程进到步骤S057,并在判断结果为NO(MT车辆)的情形下,流程进到步骤S067A。
在步骤S057,确定制动ON判断标志F_BKSW是否为1。在判断结果为YES(制动ON)的情形下,流程进到步骤S063,而在判断结果为NO(制动OFF)的情形下,流程进到步骤S057A。
在步骤S063,确定车速VP是否为0。在判断结果为YES的情形下,流程进到步骤S083,而在判断结果为NO的情形下,流程进到步骤S064。
在步骤S064,确定发动机停止控制执行标志F_FCMG是否为1。在判断结果为NO的情形下,流程进到步骤S065,而在判断结果为YES的情形下,流程进到步骤S084。
在步骤S065,确定换档DNE强制REGEN释放判断处理过程延时器TNERGN是否为0。在判断结果为YES的情形下,流程进到步骤S066,而在判断结果为NO的情形下,流程进到步骤S068。
在步骤S066,确定发动机突变率是否小于非REGEN判断发动机转速#DNRGNCUT按DNE的负值。这里,REGEN判断发动机转速#DNRGNCUT按DNE是发动机转速NE的变化率DNE,这是作为确定是否进行发电量降低的标准,这取决于发动机转速变化率DNE。
在步骤S066的判断结果为发动机转速NE的降低(减速率)大(YES)的情形下,流程进到步骤S082。在步骤S082,半-啮合离合器判断期间发动机转速增加标志F_NERGNUP设置为1,且流程进到步骤S085。
这里,提供半-啮合离合器判断期间发动机转速增加标志F_NERGNUP的原因如下。每当半-啮合离合器期间发动机转速NE变化时,以下所述步骤S070的判断可防止频繁的切换摆动,并从而在半-啮合离合器期间,在半-啮合离合器判断期间的发动机转速增加。为了澄清这一点,设置半-啮合离合器期间发动机转速增加标志F_NERGNUP。
在步骤S066的判断结果为发动机转速增加且发动机转速NE的降低(降低率)小(NO)的情形下,流程进到步骤S067。
在步骤S067,确定MT/CVT判断标志F_AT是否为1。在判断结果为NO(MT车辆)的情形下,流程进到步骤S079。在判断结果为YES(CVT车辆)的情形下,流程进到步骤S068。
在步骤S079,确定半啮合离合器判断标志F_NGRHCL是否为1。在判断结果为YES的情形下,流程进到步骤S082。此外,在半啮合离合器判断没有进行(NO)的情形下,流程进到步骤S080。
在步骤S080,比较先前的齿轮位NGR和当前的齿轮位NGR1,并通过比较先前的和当前的齿轮位确定齿轮是否已换高速档。
在步骤S080的判断结果为齿轮位已经换高速档(NO)的情形下,流程进到步骤S082。在步骤S080的判断结果为在当前和先前齿轮位之间齿轮位没有换高速档(YES)的情形下,流程进到步骤S068。这样,在半啮合离合器的情形下,处理过程进到步骤S082,而进一步向怠速模式移动的原因在于,当在半啮合离合器状态发生再生时,有可能引起发动机失速。此外,在齿轮已经换高速档的情形下,流程进到步骤S082,而进一步移动到怠速模式的原因在于当在因齿轮换高速档发动机转速降低期间发生再生时,有可能引起发动机失速。
在步骤S068,确定在半啮合离合器判断期间发动机转速增加标志F_NERGNUP是否为1。在判断的结果为在半啮合离合器判断期间发动机转速增加是必须的且标志设置为(=1)(YES)的情形下,则流程进到步骤S081,且用于防止摆动的增加转速#DNERGNUP添加到对每一齿轮设置的充电发动机转速下限值#NERGNLx,该添加值设置到充电发动机转速下限值NERGNL,且流程进到步骤S070。在步骤S068的判断结果为在半啮合离合器判断期间发动机转速增加是不必要的,且标志复位为(=0)(NO)的情形下,则流程进到步骤S069,且对每一齿轮设置的充电发动机转速下限值#NERGNLx设置为充电发动机转速下限NERGNL,且流程进到S070。
此外,在步骤S070,确定发动机转速NE是否等于或小于充电发动机转速下限NERGNL。在判断结果指出转速数低(NE≤NERGNL,YES)的情形下,流程进到步骤S082。在判断结果指出转速数低(NE>NERGNL,NO)的情形下,流程进到步骤S071。
在步骤S057A,判断紧急辅助需求标志F_MASTSCR是否为1。这一紧急辅助是用于通过加速期间暂时增加辅助量而增加加速传感度。基本上,当节气门的变化量大时,紧急辅助需求标志F_MASTSCR被设置为1。
在步骤S057A的判断为结果为NO的情形下,则在步骤S057B进行加速期间的REGENF处理,且流程进到步骤S057D。此外,在步骤S057A的判断为结果为YES的情形下,则在步骤S057C进行最终充电命令值REGENF的减量处理,且流程进到步骤S058。
在步骤S057D,确定减速期间的REGEN处理标志F_ACCRGN是否为1。在判断结果为YES(处理正在进行)的情形下,流程进到步骤S058,并在判断结果为NO(处理没有进行)的情形下,流程进到步骤S057C。
在步骤S058,确定最终充电命令值REGENF是否等于或小于0。在判断结果为YES的情形下,流程进到步骤S059的“加速模式”。在加速模式中,由电动机M对发动机E提供驱动辅助,并且流程进到步骤S058A。在步骤S058的判断结果为NO的情形下,控制结束。
在步骤S059A,确定辅助允许标志F_ACCAST是否为1。在判断结果为YES的情形下,控制结束,并在判断结果为NO的情形下,流程进到步骤S059B。
在步骤S059B,确定推进辅助允许标志F_STRAST是否为1。在判断结果为YES的情形下,控制结束,并在判断结果为NO的情形下,流程进到步骤S059。
在步骤S059C,确定紧急辅助允许标志F_SCRAST是否为1。在判断结果为YES的情形下,控制结束,并在判断结果为NO的情形下,流程进到步骤S059D。
在步骤S059D,确定休缸再激活辅助允许标志F_RCSAST是否为1。在判断结果为YES的情形下,控制结束,并在判断结果为NO的情形下,流程进到步骤S063。这里,休缸再激活辅助允许标志F_RCSAST为1的意义是,当从所有汽缸休缸驱动向所有汽缸激活(常规)驱动移动时,允许由电动机进行驱动辅助,这将在以下解释。
在步骤S071,确定车辆速度VP是否等于或小于减速模式制动判断下限车速#VRGNBK。此外,减速模式制动判断下限车速#VRGNBK是一个有滞后的值。在判断结果为车辆速度小于或等于减速模式制动判断下限车速#VRGNBK(YES)的情形下,流程进到S074。在判断结果为车辆速度大于减速模式制动判断下限车速#VRGNBK(NO)的情形下,流程进到S072。
在步骤S072,确定制动ON判断标志F_BKSW是否为1。在判断结果为YES的情形下,流程进到步骤S073,并在判断结果为NO的情形下,流程进到S074。
在步骤S073,确定IDLS判断标志是否为1。在判断结果为NO(节气门完全关闭)的情形下,流程进到S078的“减速模式”,并在步骤S077A在加速期间通过进行REGEN处理过程控制结束。此外,在减速模式中,通过电动机M进行进行再生制动,但由于所有汽缸在这一减速模式中被休缸,因而电动机M产生的再生量可增加等于发动机摩擦降低的量。在步骤S073判断结果为YES(节气门没有完全关闭)的情形下,流程进到步骤S074。
在步骤S074,确定燃油切断标志F_FC是否为1。这一标志是燃油切断判断标志,当在步骤S078的“减速模式”下通过电动机M进行再生时,这一标志取值1,并切断燃油。在步骤S074判断结果为减速燃油切断正在进行(YES)的情形下,则流程进到步骤S078。在步骤S074判断结果为为燃油切断没有进行(NO)的情形下,流程进到步骤S075,进行最终辅助命令值ASTPWRF的减量处理过程,且流程进到步骤S076。在步骤S076,确定最终辅助命令值ASTPWRF是否等于或小于0。在判断结果为YES的情形下,流程进到步骤S077的“巡航模式”,并在步骤S077A中减速期间进行REGEN处理过程之后控制结束。在巡航模式下,电动机不被驱动,且车辆在发动机E的驱动力下行进。此外,取决于车辆的操作状态,还有当电动机进行再生制动并用作为发动机对蓄电池3充电时的情形。
在步骤S076的判断结果为NO的情形下,控制完成。
“所有汽缸休缸驱动切换执行处理过程”
以下,基于图6说明所有汽缸休缸驱动切换执行处理过程。
这里,所有汽缸休缸驱动的意义是在不变的条件下在减速再生期间,进气阀与排气阀被可变阀定时机构VT关闭,并为了降低发动机摩擦并增加减速再生量而进行驱动。在以下所述的流程中,用于这一所有汽缸休缸驱动与不进行所有汽缸休缸的常规驱动之间的切换的标志(所有汽缸休缸执行标志F_ALCS)的设置和复位,以预定的周期进行。这一所有汽缸休缸执行标志F_ALCS形成休缸辨别装置。
在步骤S101,确定指示F/S(故障防护)检测是否已经完成。在判断结果为NO的情形下,流程进到步骤S102,并在判断结果为YES的情形下,流程进到步骤S114。这是因为在有任何故障的情形下,所有汽缸休缸不应当进行。
在步骤S102,通过所有汽缸休缸执行标志F_FALCS是否为1确定是否所有汽缸休缸驱动在进行。这一所有汽缸休缸执行标志F_ALCS是由这一流程设置的,并在标志值为1的情形下,执行所有汽缸休缸驱动,而在其为0的情形下,不进行所有汽缸休缸驱动,而进行常规驱动。
在步骤S102的判断结果为YES且所有汽缸休缸执行在进行中的情形下,流程进到步骤S105。因而,当由于所有汽缸休缸执行先决条件判断而使所有汽缸休缸执行(F_ALCS=1)变为在进行时,不进行所有汽缸休缸先决条件判断。在步骤S102的判断结果为NO且所有汽缸休缸执行不处于进行中的情形下,则在步骤S103进行所有汽缸休缸执行先决条件判断(F_ALCSSTB_JUD),且流程进到步骤S104。就在由于这一所有汽缸休缸执行先决条件判断而满足先决条件的情形而言,执行所有汽缸休缸下降。
在步骤S104,确定是否所有汽缸休缸待命标志F_ALCSSTB为1。当在步骤S103通过判断满足先决条件时,这一标志取值1,并当它们不满足时,取值0。通过这一标志,确定是否根据车辆的操作状态执行休缸。在步骤S104判断结果为YES的情形下,则满足先决条件,因而流程进到步骤S105。在步骤S104判断结果为NO的情形下,先决条件不满足,这样流程进到S114。
在步骤S105,进行以下将说明的所有汽缸休缸释放条件判断(F_ALCSSTP_JUD),流程进到步骤S106。在通过所有汽缸休缸释放条件判断满足释放条件的情形下,不执行所有汽缸休缸操作。这一所有汽缸休缸释放条件判断不同于所有汽缸休缸先决条件判断,并在进行图6中的处理过程的情形下总是要执行。
在步骤S106,确定是否所有汽缸休缸释放条件满足标志F_ALCSSTP为1。这一标志是这样的标志,即当通过步骤S105的判断满足释放条件时则取标志值为1,并当它们不满足时,取标志值0。通过这一标志,在发动机休缸时根据车辆操作状态,确定休缸释放是否可行。在步骤S106的判断结果为YES的情形下,则释放条件满足,且流程进到步骤S114。在步骤S106的判断结果为NO的情形下,则释放条件不满足,于是流程进到步骤S107。
在步骤S107,对用于上述滑阀SV的螺线管OFF延时定时器TALCSDLY2设置预定的值#TMALCS2,且流程进到步骤S108。这是因为,当操作从所有汽缸休缸操作向常规操作移动的情形下,从步骤S105的判断完成到步骤S116滑阀SV的螺线管的OFF操作完成要保证一个固定的时间段,这将在以下说明。
在步骤S108,确定下述的螺线管ON延时定时器TALCSDLY1是否为0。在判断结果为YES的情形下,则固定的时间段已经过去,因而流程进到步骤S109。在判断结果为NO的情形下,则固定的时间段没有过去,因而流程进到步骤S116。
在步骤S109,对螺线管标志F_ALCSSOL的所有汽缸休缸设置为1(所有汽缸休缸的滑阀螺线管为ON),且流程进到步骤S110。
在步骤S110,通过油压传感器判断油压是否实际上由对所有汽缸休缸的螺线管ON操作所产生。具体来说,即判断发动机油压POIL是否等于或大于所有汽缸休缸操作执行判断油压#POILSCH(例如,137kPA(=1.4kg/cm2))。在判断结果为YES且处于高压一侧的情形下,流程进到S111。在判断结果为NO(有滞后作用)的情形下,流程进到步骤S118。这里,可使用油压开关而不是油压传感器来判断。
在步骤S111,确定是否所有汽缸休缸操作执行延时定时器CSDLY1为0,以便产生从滑阀为ON到油已经施加压力的时间段。在判断结果为为YES的情形下,流程进到S112。在判断结果为NO的情形下,流程进到步骤S120。
在步骤S112,在一表格中搜索定时器值#TMOCSDL2,该值与由油温传感器测量的油温TOIL相关,并把所有汽缸休缸操作释放延时定时器CSDLY2设置到这一值。当温度低时,油压升高慢,而油压影响操作延时。这样,定时器值#TMOCSDL2是这样的一个值,即在油温TOIL较低时该值较大。
此外,在步骤S113,所有汽缸休缸执行标志F_ALCS设置为1,且控制完成。而且,在步骤S112,也可以基于发动机水温而不是油温求得定时器值。
在步骤S114,螺线管ON延时定时器TALCSDLY1设置为预定值#TMALSC1,且流程进到步骤S115。这使得在操作从常规操作移动到所有汽缸休缸操作的情形下,保证了从步骤S105的判断的完成到步骤S109滑阀的螺线管ON操作的不变的时间段。
在步骤S115,确定是否螺线管OFF延时定时器TALCSDLY2为0。在判断结果为YES的情形下,则不变的时间段已经过去,这样流程进到步骤S116。在步骤S115判断结果为NO的情形下,则不变的时间段没有过去,这样流程进到步骤S109。
在步骤S116,设置所有汽缸休缸螺线管标志F_ALCSSOL为0(对所有被休缸汽缸设置滑阀螺线管为OFF),且流程进到步骤S117。
在步骤S117,油压传感器确定是否由于对所有汽缸休缸释放的螺线管的OFF操作使油压实际上被释放。具体来说,即是确定油压POIL是否等于或小于所有汽缸休缸操作释放判断油压#POILCSL(例如,98kPa(=1.0kg/cm2))。在判断结果为YES且有低压的情形下,流程进到步骤S118。在判断结果为NO(有滞后)的情形下,流程进到步骤S111。这种情形下,也可以使用油压开关而不是油压传感器。
在步骤S118,确定是否所有休缸操作释放延时定时器TCSDLY2为0,以便保证从滑阀转为OFF到油压释放的时间段。在判断结果为YES的情形下,流程进到步骤S119。在判断结果为NO的情形下,流程进到步骤S113。
在步骤S119,在一表格中寻找与由油温传感器测量的油温TOIL相关的定时器值#TMOCSDL1,且把所有汽缸休缸操作执行延时定时器TCSDLY1设置到这一值。这是因为,当油温低时,由于油压的增加被延时,致使油温能够影响操作延时。这样,油温TOIL越低,定时器值TCSDLY1的值越高。
此外,在步骤S120,设置所有汽缸休缸执行标志F_ALCS为0,且控制结束。而且,在步骤S119,可以基于发动机水温而不是油温寻找定时器的值。
所有汽缸休缸先决条件执行判断处理过程
以下根据图7,将说明步骤S103的所有汽缸休缸先决条件执行判断处理过程。
在步骤S131,确定相对于大气压的进气管负压PBGA是否等于或大于所有汽缸休缸执行最大负压#PBGALCS(例如,-40kPa(=300mmHg))。在发动机负荷大的情形下,不应进行所有汽缸休缸。在步骤S131的判断结果为YES(低负荷)的情形下,流程进到步骤S132,并在判断结果为NO的情形下,流程进到步骤S138。
在步骤S138,把所有汽缸休缸待命标志F_ALCSSTB设置为0,因为不满足所有汽缸休缸先决条件,故控制结束。
在步骤S132,确定外部气温TA是否处于预定范围之内(所有休缸执行最小外部气温#TAALCSL(例如,0℃)≤TA≤所有汽缸休缸执行最大外部气温#TAALCSH(例如,50℃))。在步骤S132的判断结果为外部气温TA处于预定范围之内的情形下,流程进到步骤S133。在步骤S132的判断结果为外部气温TA不处于预定范围之内的情形下,流程进到步骤S138。这是因为,如果在外部气温TA落到低于所有所有汽缸休缸执行最小外部气温#TAALCSL,或升高到高于所有汽缸休缸执行最大外部气温#TAALCSH的情形下,进行所有汽缸休缸,则发动机将变得不稳定。
在步骤S133,确定冷却水温度TW是否在预定范围之内(所有汽缸休缸执行最小冷却水温度#TWALCSL(例如,70℃)≤TW≤所有汽缸休缸执行最大冷却水温度#TWALCSH(例如,100℃))。在步骤S133的判断结果为冷却水温度TW在预定范围之内的情形下,流程进到步骤S134。在其不处于预定范围内的情形下,流程进到步骤S138。这是因为,如果在冷却水温度TW落到低于所有所有汽缸休缸执行最小冷却水温度#TWALCSL,或升高到所有汽缸休缸执行最大冷却水温度#TWALCSH之上的情形下,进行所有汽缸休缸,则发动机将变得不稳定。
在步骤S134,确定气压PA是否等于或大于所有汽缸休缸执行最大气压#PAALCS(例如,77.3kPa(=580mmHg))。在步骤S134的判断结果为YES(高气压)的情形下,流程进到步骤S135,并在判断结果为NO的情形下,流程进到步骤S138。这是因为,在气压低的情形下,不应当进行所有汽缸休缸。(例如,不能保证在制动操作期间制动主动力负压处于充足的状态)
在步骤S135,确定12V辅助蓄电池4的电压(驱动源电压)是否等于或大于所有汽缸休缸执行最大电压#VBALCS(例如,10.5V)。在判断结果为YES(高电压)的情形下,流程进到步骤S136,并在判断结果为NO的情形下,流程进到步骤S138。这是因为,在12V蓄电池电压VE低于预定电压的情形下,滑阀SV的响应性不良。这是在低温环境中蓄电池温度降低期间以及蓄电池劣化期间所取得的测量。
在步骤S136,确定油温TOIL是否在预定范围(例如,70℃)≤TOIL≤所有汽缸休缸执行最大油温#TOALCSH(例如,100℃)。在步骤S136的判断结果为油温TOIL在预定范围内的情形下,流程进到步骤S137。在判断结果为不在预定范围内的情形下,流程进到步骤S138。这是因为,如果在油温TOIL降低到所有汽缸休缸执行最小油温#TOALCSL之下,或上升到所有汽缸休缸执行最大油温#TOALCSH之上的情形下,进行所有汽缸休缸,则在发动机操作期间及所有汽缸休缸期间,切换的响应性不稳定。
在步骤S137,因为满足所有汽缸休缸先决条件,因而所有汽缸休缸待命标志F_ALCSSTB设置为1,而控制结束。
“所有汽缸休缸释放条件判断处理过程”
以下基于图8将说明所有汽缸休缸释放条件判断处理过程。而且,该过程以预定的周期重复。
在步骤S141,确定燃油切断标志F_FC是否为1。在步骤S141的判断结果为YES的情形下,流程进到步骤S142,并在判断结果为NO的情形下,流程进到步骤S157。这一判断的目的是降低减速燃油切断期间发动机的摩擦,并增加等于这一降低量的再生量。
在步骤S157,因为满足所有汽缸休缸释放条件,故所有汽缸休缸释放条件满足标志F_ALCSSTP设置为1,且控制结束。
在步骤S142,确定再生制动是否在进行。在步骤S142的判断结果为YES的情形下,流程进到步骤S143,并在判断结果为NO的情形下,流程进到步骤S157。
在步骤S143,确定MT/CVT判断标志F_AT是否为1。在判断结果为NO(MT车辆)的情形下,流程进到步骤S144。在判断结果为YES(AT/CVT车辆)的情形下,流程进到步骤S155。
在步骤S155,确定啮合判断标志F_ATNP是否为1。在判断结果为NO(啮合)的情形下,流程进到步骤S156。在判断结果为YES(N/P范围)的情形下,流程进到步骤S157。
在步骤S156,确定逆位置判断标志F_ATPR是否为1。在判断结果为YES(逆位置)的情形下,流程进到步骤S157。在判断结果为NO(非逆位置)的情形下,流程进到步骤S146。
通过步骤S155和步骤S156中的处理过程释放N/P范围中及逆位置的所有汽缸休缸。
在步骤S144,确定先前齿轮位NGR是否是高于所有汽缸休缸继续最小齿轮位#NGRALCS的齿轮(例如,第三齿轮包含在这一位置)。在判断结果为NO(低齿轮侧)的情形下,流程进到步骤S157。这是为了防止在拥挤的交通条件下在低齿轮位再生率的劣化及发生向休缸频繁的切换。
在步骤S145,确定半啮合离合器判断标志F_NGRHCL是否为1(半啮合离合器)。在判断结果为YES(半啮合离合器)的情形下,流程进到步骤S157,并在判断结果为NO的情形下,流程进到步骤S156。从而,例如,能够防止不必要的休缸,以至诸如在为了停车移动到半啮合离合器的情形下发动机失速的不便,或为了在加速期间换档而移动到半啮合离合器状态的情形下而不能响应驾驶者的要求等。
在步骤S146,确定发动机转速变化率DNE是否等于或小于所有汽缸休缸继续执行最大发动机转速变化率#DNEALCS的负值(例如,-10rpm)。在判断结果为YES(发动机转速的降低率高)的情形下,流程进到步骤S157,并在判断结果为NO的情形下,流程进到步骤S148。这是为了防止在发动机转速降低率大时进行所有汽缸休缸的情形下的发动机失速。
在步骤S148,确定车速VP是否在预定范围(例如,10km/h)≤VP≤所有汽缸休缸继续执行最大车速#VPALCSH(例如,60km/h)。在步骤S148的判断结果为车速VP在预定范围之内的情形下,流程进到步骤S149。在判断结果为车速不在预定范围之内的情形下,流程进到步骤S157。在车速VP降低到低于所有汽缸休缸继续执行最小车速#VPALCSL,或上升到高于所有汽缸休缸继续执行最大车速#VPALCSH的情形下,则所有汽缸休缸被释放。
在步骤S149,确定发动机转速NE是否在预定范围(例如,800rpm)≤NE≤所有汽缸休缸继续执行最大发动机转速#NALCSH(例如,3,000rpm)。在步骤S149的判断结果为发动机转速NE在预定范围的情形下,流程进到步骤S150。在发动机转速NE不在预定范围的情形下,流程进到步骤S157。在发动机转速降低到低于所有汽缸休缸继续执行最小发动机转速#NALCSL,或上升到高于所有汽缸休缸继续执行最大发动机转速#NALCSH的情形下,则所有汽缸休缸被释放。有可能当发动机转速NE低时再生效率将劣化,且不能保证用于所有汽缸休缸的切换油压。此外,当发动机转速NE太高时,油压有可能因高转速将变得太高而使汽缸休缸的切换成为不可能,此外,有可能用于休缸的工作油消耗劣化。
在步骤S150,确定制动主动力MPGA中的负压是否等于或大于所有汽缸休缸执行实现继续执行最大负压#MPALCS(例如,-26.7kPa(=-200mmHg))。在判断结果为制动主动力MPG中的负压相对于大气压等于或大于所有汽缸休缸执行实现继续执行最大负压#MPALCS(MPGA≥MPACLS,YES)的情形下,流程进到步骤S151。在判断结果为制动主动力MPG中的负压相对于大气压小于所有汽缸休缸执行实现继续执行最大负压#MPALCS(MPGA<MPACLS,YES)的情形下,流程进到步骤S157。这是因为在制动主力负压不足的情形下所有汽缸休缸不应继续进行。
在步骤S151,确定剩余蓄电池容量QBAT是否在应当的范围之内(所有汽缸休缸继续执行最小剩余电量#QBALCSL(例如,30%)≤QBAT≤所有汽缸休缸继续执行最大剩余电量#QBALCSH(例如,80%))。在步骤S151的判断结果为确定了蓄电池剩余容量QBAT在预定的范围之内,则流程进到步骤S152。在剩余蓄电池容量QBAT不在预定范围之内的情形下,流程进到步骤S157。在剩余蓄电池容量QBAT降低到所有汽缸休缸继续执行最小剩余电量#QBALCSL之下,或升高到所有汽缸休缸继续执行最大剩余电量#QBALCSH之上的情形下,所有汽缸休缸被释放。当剩余蓄电池容量QBAT小时,不能保证在从所有休缸汽缸返回时用于通过电动机M进行的发动机驱动辅助的能量。此外,当剩余蓄电池容量QBAT太高时,也不能出现再生。
在步骤S152,确定IDLE判断标志F_THIDLMG是否为1。在判断结果为YES(不是所有汽缸关闭)的情形下,流程进到步骤S157,并在判断结果为NO(所有汽缸关闭)的情形下,流程进到步骤S153。即使在进气门从完全关闭状态稍微开启的情形下,则也释放所有汽缸休缸的继续,且产品变得更有销路。
在步骤S153,确定发动机油压POIL是否等于或在所有汽缸休缸继续执行最小油压#POALCS(例如,98-137kPk(1.0-1.4kg/cm2带滞后性))之上。在判断结果为YES的情形下,流程进到步骤S154,并在判断结果为NO的情形下,流程进到步骤S157。这是因为,在发动机油压POIL低于所有汽缸休缸继续执行最小油压#POALCS的情形下,不能保证实现休缸的油压(例如,激活滑阀SV的油压)。
在步骤S154,因为不满足所有汽缸休缸释放的条件,故继续进行所有汽缸休缸,这样所有汽缸休缸释放条件满足标志F_ALCSSTP被设置为0,而控制结束。
燃油切断执行判断处理过程
以下将参照图9说明燃油切断执行判断处理过程。此外,这一处理过程以预定周期重复。
通常,以保护发动机并改进燃油效率为目的,在满足固定的条件的情形下,进行燃油切断。然而,在是否进行这一燃油切断的判断处理过程中,增加了有关所有汽缸休缸的条件。
在步骤S201,进行高转速燃油切断执行判断处理过程,且流程进到步骤S202。这是在发动机以高速旋转(例如,发动机转速NE等于或大于620rpm)的情形下,为了发动机保护而进行的燃油切断,并在这一处理过程中,进行高转速燃油切断标志F_HNFC的设置和复位。
在标志S202,确定高转速燃油标志F_HNFC是否为1。在判断结果为YES(高转速燃油切断被满足)的情形下,流程进到步骤S212,并在判断结果为NO的情形下,流程进到步骤S203。
在步骤S212,(燃油供给停止装置),燃油切断标志F_FC被设置为1,且控制结束。此外,在燃油切断标志F_FC为1的情形下,不进行燃油注入。
在步骤S203,进行高速燃油切断执行判断处理过程,且流程进到步骤S204。这是在车辆处于高速(例如,180km/h或更高)行进情形下从速度限制观点进行的燃油切断,并在这一处理过程中,进行高车速燃油切断标志F_HVFC的设置和复位。
在步骤S204,确定高车速燃油切断标志F_HVFC是否为1。在判断结果为1(满足高车速燃油切断)的情形下,流程进到步骤S212,并在判断结果为NO的情形下,流程进到步骤S205。
在步骤S205,进行减速燃油切断执行判断处理过程,且流程进到步骤S206。这是为了改进车辆减速情形下的燃油效率而进行的燃油切断,并在这一处理过程中,进行减速燃油切断标志F_FC的设置和复位。
在步骤S206,确定燃油切断标志F_FC是否为1。在判断结果为YES的情形下,流程进到步骤S212,并在判断结果为NO的情形下,流程进到步骤S207。此外,在进入减速模式且燃油切断标志F_FC变为1的情形下,进行燃油切断。
在步骤S207,确定所有汽缸休缸执行标志F_ALCS是否为1。在判断结果为YES(所有汽缸休缸在进行)的情形下,流程进到标志S212,并在判断结果为NO的情形下,流程进到步骤S208。
在步骤S208,确定所有汽缸休缸螺线管标志F_FALCSSOL是否为1。在判断结果为YES(所有汽缸休缸螺线管为ON的情形下,流程进到步骤S212,并在判断结果为NO的情形下,流程进到步骤S209。
因而,在所有汽缸休缸操作(F_ALCS=1)正在执行,且进气阀和排气阀关闭(步骤S207)的情形下,并在所有汽缸休缸螺线管标志F_ALCSSOL为1(步骤S208)的情形下,继续进行燃油切断。
此外,在从所有汽缸休缸操作到常规操作的恢复过程的情形下,即使所有汽缸休缸执行标志F_ALCS变为0,所有汽缸休缸螺线管标志F_ALCSSOL也是0。特别地,从所有汽缸休缸螺线管为OFF的时刻到它们完全恢复,汽缸可能被休缸,于是增加根据步骤S208的所有汽缸休缸螺线管标志F_ALCSSOL的判断,并在所有汽缸休缸螺线管标志F_ALCSSOL变为0的情形下,释放燃油切断(F_FFC=0)。
在步骤S209,燃油切断标志F_FC设置为0,燃油切断被释放,且控制结束。
减速模式
以下,将参照图10和图11说明减速模式。在这一模式中,与没有装设所有汽缸休缸功能的普通车辆比较,增加了再生量(这将在以下步骤S255中说明)。特别地,通过进行所有汽缸休缸而降低了发动机的摩擦,并能够保证再生量等于该量。于是,与普通车辆比较,可设置再生量为大。于是,因为通过电动机M能够对于发动机E增加驱动辅助的频率和驱动辅助量达到等于再生中这一增加的量,因而能够改进燃油效率。此外,当发动机摩擦因所有汽缸休缸而降低时,减速的感觉小,但是因为再生量设置得较大而达到等于这一量,故驾驶者觉察到的减速感觉不变,并且没有不舒适的感觉加于驾驶者。此外,这一处理过程以预定的周期重复。
在步骤S251,确定车辆是否处于电力产生模式。在判断结果为YES的情形下,流程进到步骤S252,并在判断结果为NO的情形下,流程进到步骤S253。
在步骤S252,最终电力产生命令值REGENF代替减速再生最终操作值DECRGNF,且流程进到步骤S254。在步骤S253,减速再生最终操作值DECRGNF设置为0,且流程进到步骤S254。在步骤S254,车辆被设置为再生制动模式,且流程进到步骤S255。
在步骤S255(再生量计算装置),进行以下将说明的目标再生量计算(DECRGN_OBJ_CAL),且流程进到步骤S256。
在步骤S256,确定能量存储区D标志F_ESZONED是否为1。这一标志在蓄电池3的剩余蓄电池容量区例如为等于或大于80%的情形下被设置。在判断结果为YES的情形下,流程进到步骤S270,并在判断结果为NO的情形下,流程进到步骤S257。因为在剩余蓄电池电量高的情形下必须增加对再生的限制,因而设置这一处理过程。
在步骤S257,确定逐步减速更新时间TDECRGN是否为0。在判断结果为YES(=0)的情形下,流程进到步骤S258,并在判断结果为NO的情形下,流程进到步骤S263。
在步骤S258,通过搜索一个表,逐步增量更新定时器TDECRGN被设置为与车速VP相关的定时器值#TMDECRGNx,且流程进到步骤S259。这一表是这样设置的,使得在车速增加时,定时器的值变大。从而,在车速大的情形下,能够防止突然进入再生制动。此外,定时器值#TMDECRGNx在制动ON(#TMDECRGNB)与OFF(#TMDECRGNN)之间进行切换。这样,通过在表中搜索与车速VP相关的定时器值,增加了设置的自由度。
在步骤S259,确定减速再生计算值DECRGN是否等于或大于减速再生最终计算值DECRGNF。在判断结果为YES的情形下,流程进到步骤S260,并在判断结果为NO的情形下,流程进到步骤S264。
在步骤S260,通过搜索一个表逐步增加量#DDECRNP被设置为与车速VP相关的逐步减量更新定时器值#DDECRNPx,且流程进到步骤S261。这一表是这样设置的,即在车速增加时,时间值变得较大。此外,定时器值#DDECRNPx在制动ON(#DDECRNPB)与OFF(#DDECRNPN)之间进行切换。这样,通过搜索表中与车速相关的定时器值,增加了设置的自由度。
在步骤S261,向减速再生最终操作值DECRGNF添加逐步增量#DDECRNP,且流程进到步骤S262。
在步骤S262,确定减速再生最终操作值DECRGNF是否等于或小于减速再生操作值DECRGN。在判断结果为YES的情形下,流程进到步骤S263,并在判断结果为NO的情形下,流程进到步骤S267。
在步骤S263,减速再生允许标志F_DECRGN被设置为1,并在步骤S268,最终动力产生命令REGENF被设置为减速再生最终操作值DECRGNF,在步骤S269,最终辅助命令值ASTPWRF被设置为0,且控制结束。
在步骤S267,减速再生操作值DECRGN被设置为减速再生最终操作值DECRGNF,且流程进到步骤S263。
在步骤S264,通过搜索一个表逐步减量#DDECRNM被设置为与车速VP相关的逐步减量#DDECRNMx,且流程进到步骤S265。这一表是这样设置的,即车速增加时,时间值变得较大。此外,逐步减量#DDECRNMx在制动ON(#DDECRNMB)与OFF(#DDECRNMN)之间进行切换。这样,通过在表中搜索与车速相关的减量,增加了设置的自由度。
在步骤S265,从减速再生最终操作值DECRGNF减去逐步减量#DDECRNM,且流程进到步骤S266。
在步骤S266,确定减速再生最终操作值DECRGNF是否等于或大于减速再生操作值DECRGN。在判断结果为YES的情形下,流程进到步骤S263,并在判断结果为NO的情形下,流程进到步骤S267。
在步骤S270,确定减速再生允许标志F_DECRGN是否为1。在判断结果为YES的情形下,流程进到步骤S271,并在判断结果为NO的情形下,流程进到步骤S276。
在步骤S276,减速再生最终操作值DECRGNF被设置为0,在步骤S277,减速再生允许标志F_DECRGN被设置为1,且流程进到步骤S268。
在步骤S271,确定车辆是否预先处于减速再生模式。在判断结果为YES的情形下,流程进到步骤S272,并在判断结果为NO的情形下,流程进到步骤S278。
在步骤S272,确定逐步减量更新定时器TDECRND是否为0。在判断结果为YES的情形下,流程进到步骤S273,并在判断结果为NO的情形下,流程进到步骤S263。
在步骤S273,逐步减量更新定时器TDECRND被设置为定时器值#TMDECRND,并在步骤S274,从减速再生最终操作值DECRGNF减去逐步减量#DDECND。
在步骤S275,确定减速再生最终操作值DECRGNF是否等于或小于0。在判断结果为YES的情形下,流程进到步骤S276,并在判断结果为NO的情形下,流程进到步骤S263。
这样,在进入减速模式的情形下或在离开减速模式的情形下,通过分别逐步加上或逐步减去再生量,能够实现平滑的过渡。
减速目标再生量的计算
以下参照图12说明图10步骤S255中目标再生量的计算处理过程。这一目标再生量超过上述传统技术的目标再生量。此外,以下处理过程是以预定周期重复的。
在步骤S310,确定制动切换标志F_BKSE是否为1。在判断结果为YES(制动ON)的情形下,流程进到步骤S304,并在判断结果为NO(制动OFF)的情形下,流程进到步骤S302。当施加制动时,再生量增加。
在步骤S302,减速再生操作值DECRGN被设置为操作值#REGEN,该值是使用对于MT和CVT分开的表搜索到的,且流程进到步骤S303。这里,操作值设置在与发动机转速相关的MT表中,以及在与车速相关的CVT表中。并且,由空气调节器切换步骤S302中的表ON或OFF。此外,用于MT车辆的表对于每一齿轮位被切换。
在步骤S303,根据辅助蓄电池4的平均消耗电压VELAVE在一表中搜索补偿值#DRGVELN,减速再生辅助量DRGVEL被设置为这一补偿值#DRGVELN,且流程进到步骤S306。设置补偿值是为了根据辅助蓄电池的消耗量改变再生量。此外,这一补偿量在下述的步骤S317被添加。
在步骤S304,减速再生操作值DECRGN被设置为操作值#REGENBR,该值是使用对MT和CVT分开的表被搜索的,且流程进到步骤S305。这里,操作值设置在与发动机转速相关的MT表和与车速相关的CVT表中。并且,由空气调节器切换步骤S304中的表ON或OFF。此外,用于MT车辆的表对于每一齿轮位被切换。
在步骤S305,根据辅助蓄电池4的平均消耗电压VELAVE在一表中搜索补偿值#DRGBVELN,减速再生辅助量DRGVEL被设置为这一补偿值#DRGVELN,且流程进到步骤S309。
在步骤S306,确定剩余蓄电池容量QBAT是否等于或大于预定剩余电量#QBCRSRH(带有滞后)。在判断结果为YES的情形下,流程进到步骤S307,并在判断结果为NO的情形下,流程进到步骤S309。
在步骤S307,确定车速是否等于或大于预定车速#VRSMS。判断结果为YES的情形下,流程进到S308,并在判断结果为NO的情形下,流程进到步骤S309。
在步骤S308,减速再生操作值DECRGN被设置为乘以常数#KRSM的一个值作为新的减速再生操作值DECRGN,且流程进到步骤S309。特别地,在步骤S307,剩余蓄电池容量QBAT足够,并在步骤S308车速为高速,于是再生限制变大,因而当施加常规再生制动时,因为减速的感觉变大,故驾驶者踏压加速器,于是燃油消耗效率恶化。为了防止这一点,在步骤S308,通过乘以系数#KRSMS的补偿使减速再生操作值DECRGN变小。
在步骤S309(补偿量计算装置),通过搜索一个表(图13),所有汽缸休缸再生计算值(补偿量)CSRGN被设置为与发动机转速NE相关的操作值#ALCSRGN,且流程进到步骤S310。这里,该表表示常规操作期间发动机摩擦与所有汽缸休缸操作期间发动机摩擦之间的差。此外,使用发动机转速NE作为参照进行表的搜索的原因在于,发动机的摩擦是通过发动机转速NE确定的。
在步骤310,通过搜索一个表,所有汽缸休缸再生操作补偿系数KTCSRGN被设置为与发动机水温TW相关的补偿系数#KTWCSRGN,且流程进到步骤S311。这里使用发动机水温TW的原因在于,例如当发动机水温低时,发动机的摩擦变大等,因而发动机摩擦受到发动机水温很大影响。此外,可使用上述的油温TOIL代替发动机水温TW。
在步骤S311(进气负压计算装置),所有汽缸休缸再生进气管负压补偿系数KPBCSRGN,被设置为与进气管负压PBA相关的进气管负压系数#KPBBCSRGN,且流程进到步骤S312。这样使用进气管负压,可以使系数在运动的各阶段逐步变化,即从进气管负压低的常规操作(进气管负压补偿系数#KPBBCSRGN=1)到进气管负压高的所有汽缸休缸操作(进气管负压补偿系数#KPBBCSRGN=0),以及从所有汽缸休缸操作到常规操作。
特别地,在减速期间进行所有汽缸休缸的情形下,最后必须关闭进气阀及排气阀,但即使所有汽缸休缸执行标志F_ALCS的标志值已被确认,也不能正确地认为是对此的确认。于是,为了检测进气阀与排气阀被关闭,检测进气管负压是可靠的。
通过改变与这一进气管负压相关的进气管负压补偿系数#KPBBCSRGN,这反映在所有汽缸休缸再生操作值CSRGN中,并获得减速的连续的感觉。此外,与所有汽缸休缸执行标志F_ALCS的标志值(1或0)相关,上述的进气管负压补偿系数#KPBBCSRGN的表(图14)被切换,并通过改变进入所有汽缸休缸操作情形与离开所有汽缸休缸操作情形的性质,能够使产品更可销售。
在步骤S312,所有汽缸休缸再生操作值CSRGN,通过使其乘以所有汽缸休缸再生操作补偿系数KTCSRGN及进气管负压补偿系数#KPBBCSRGN,被设置为一个值,作为新的所有汽缸休缸再生操作值CSRGN,且流程进到步骤S313。由于这一步骤的处理过程,找到考虑了发动机水温TW和进气管负压PBA的所有汽缸休缸再生操作值CSRGN。
在步骤S313,上述所有汽缸休缸再生操作值CSRGN被添加到在上述步骤S308求得的减速再生操作值DECRGN,这一值被设置为新的减速再生操作值DECRGN,且流程进到步骤S314。从而,当给定与常规操作等同的减速传感量时,能够保证更大的再生量。
在步骤S314,确定车速VP是否等于或大于预定值#VPRGELL(例如,20km/h)。在判断结果为YES的情形下,流程进到步骤S315,并在判断结果为NO的情形下,控制结束。
在步骤S315,确定车速VP是否等于或小于预定的值#VPRGELH(例如,90km/h)。在判断结果为YES的情形下,流程进到步骤S316,并在判断结果为NO的情形下,控制结束。
在步骤S316,确定发动机转速NE是否等于或大于预定的值#NPRGELL。在判断结果为YES的情形下,流程进到步骤S317,并在判断结果为NO的情形下,控制结束。
在步骤S317,上述步骤S303的减速再生补偿量DRGVEL被添加到减速再生操作值DECRGN,这一值被设置为新的减速再生补偿量DRGVEL,且控制结束。从而,在辅助蓄电池4的消耗大的情形下,向蓄电池3提供的再生量可通过增加减速再生量来保证。
而且,所有上述步骤S314的预定值#VPRGELL,步骤S315的预定值#VPRGELH,以及步骤S316的预定值NPRGELL都是有滞后的值。
“对于CCVT车辆发动机转速增加信号判断处理过程”
以下将参照图15说明对于CVT车辆发动机转速增加信号判断处理过程。
在CVT车辆中,在满足固定条件的情形下,进行增加发动机转速NE的处理过程,但是这一处理过程期间,添加了与所有休缸汽缸相关的条件。特别地,如上所述,在所有汽缸休缸操作期间,发动机E的摩擦降低,而再生量能够增加等于这一降低的量。这种情形下,由于高扭矩的再生作为电动机中热产生的原因而起作用,这样通过增加CVT的(例如输入轴的)转速数,即发动机转速,而降低电动机的热负荷。同时,再生量增加。具体来说是说,这是通过改变CVT的传动比使CVT输入侧传动比增加而进行的。
具体来说,在这一流程图中,进行发动机转速增加标志F_NEUP的设置和复位。当在发动机转速增加标志F_NEUP中设置1时,发动机转速NE增加。当发动机转速增加标志F_NEUP设置为0时,读取常规节气门OFF的映象值。如图16中所示,对于每一范围类似的车速在CVT车辆加速期间,取决于节气门打开的程度而使用增加发动机转速的映象。反之,在减速期间,因为对于车速使用唯一的节气门OFF映象,故设置由车速VP决定的发动机转速NE,且随车速VP的降低而降低发动机转速NE。特别地,在设置发动机转速增加标志F_NEUP的情形下,在减速期间节气门OFF映象上升预定值。此外,为了防止高扭矩再生,增加量最好与速度的降低成比例地变大。
这样,通过增加发动机转速NE,在不进行所有汽缸休缸的情形下,同时驾驶者感觉到相等的减速,能够实现等于因所有汽缸休缸操作导致的发动机摩擦降低的再生量的增加。此外,不增加再生量,仅降低施加于电动机的扭矩也是可行的。
在步骤S401,确定指示F/S(故障防护)检测是否完成。在判断结果为NO的情形下,流程进到步骤S402,并在判断结果为YES的情形下,流程进到S409。在步骤S409,通过设置发动机转速增加标志F_NEUP为1而结束控制。在某些类型的故障发生的情形下,发动机转速增加且蓄电池被充电以便使车辆趋向于更可驾驶。
在步骤S402,确定进气温度TA(等同于外部空气温度)是否等于或大于发动机转速增加要求判断进气温度#TANEUP。在判断结果为YES(高进气温度)的情形下,流程进到步骤S404,并在判断结果为NO(低进气温度)的情形下,流程进到S403。
在步骤S403,确定冷却水温度TW是否等于或大于发动机转速增加要求判断加热器冷却水温度#TWNEHT。在判断结果为YES(高水温)的情形下,流程进到步骤S404,并在判断结果为NO(低水温)的情形下,流程进到步骤S409。
这是因为,当由于步骤S402和步骤S403的处理过程外部空气温度TA和冷却水温度TW低时,因加热器的需要必须增加发动机转速以保证加热器的容量。
在步骤S404,确定冷却水温度TW是否等于或大于发动机转速增加要求判断催化剂冷却水温度#TWNEHT。在判断结果为YES(高水温)的情形下,流程进到步骤S405,并在判断结果为NO(低水温)的情形下,流程进到步骤S409。即使在确定了进气温度高的情形下,通过增加发动机转速NE,作为催因素的催化剂的温度被迅速增加,以便保持低排污区。
在步骤S405,确定能量存储区C标志F_ESZONEC是否为1。在这区域,当剩余蓄电池容量QBAT例如等于或小于20%时,设置一个标志。在判断结果为YES的情形下,流程进到步骤S408,并在判断结果为NO的情形下,流程进到步骤S406。当剩余蓄电池容量低时,在以下将说明的步骤S408中,假设节气门打开,必须提高发动机转速NE并增加剩余蓄电池容量QBAT。
在步骤S406,确定辅助蓄电池4的平均消耗电流VELAVE是否等于或大于消耗电流阈值#ELNEUHC(包含滞后的值)。在判断结果为YES(高电流)的情形下,流程进到步骤S407,并在判断结果为NO(低电流)的情形下,流程进到步骤S410。
即使剩余蓄电池容量QBAT足够,在平均消耗电流VELAVE等于或大于以下将说明的消耗电流阈值#ELNEUHC的情形下,假设在步骤S408节气门打开,在步骤S409必须通过提高发动机转速NE来增加动力产生的效率。
在步骤S407,发动机转速增加定时器TNEUP设置为定时器值#TMNEUP,且流程进到步骤S408。
在步骤S408,确定怠速判断标志F_THIDLE是否为0。在判断结果为YES(节气门关闭)的情形下,流程进到步骤S412。在判断结果为NO(节气门打开)的情形下,流程进到步骤S409。
在步骤410,确定空气调节器ON标志F_ACC是否为1。在判断结果为YES(空气调节器离合器为ON)的情形下,流程进到步骤S407,并在判断供给为NO(空气调节器为OFF)的情形下,流程进到步骤S411。在空气调节器为ON的情形下,必须增加输出,例如因为通过提高发动机转速保证了加速的感觉。
在步骤S411,确定发动机转速增加定时器TNEUP是否为0。在判断结果为YES的情形下,处理过程进到步骤S412,并在检测结果为NO的情形下,流程进到步骤S408。这是为了保证在向与下面所述的所有汽缸休缸相关的处理过程(步骤S412和步骤S413)转移中有一个固定的时间段,保证固定的时间。
在步骤S412,确定所有汽缸休缸执行标志F_ALCS是否为1。在判断结果为YES(所有汽缸休缸操作在进行中)的情形下,流程进到步骤S413,并在判断结果为NO(常规操作在进行中)的情形下,流程进到步骤S414。在步骤S414,发动机转速增加信号判断标志F_NEUP被设置为0,且控制结束。这种情形下,发动机转速增加。
在步骤S413,确定减速再生是否在进行中。在判断结果为YES(减速模式)的情形下,流程进到步骤S409,并在判断结果为NO(非减速模式)的情形下,流程进到步骤S414。
在步骤S412和S413,在所有汽缸减速操作期间以及减速再生期间,即使节气门关闭,但通过增加发动机转速NE而提高再生量。
以下将说明该操作。
于是,在车辆以非减速模式行进的情形下,在图8中步骤S141,燃油切断标志F_FC变为0,满足所有汽缸休缸释放条件(F_ALCSSTP=1),且在图6中的步骤S106的判断为YES。这样,在步骤S120,所有汽缸休缸执行标志F_ALCS变为0,且不进行所有汽缸休缸。
反之,当行进的车辆进入减速再生模式(减速再生允许标志F_MADECRGN=1)时,图8的步骤S141中的燃油切断标志F_FC变为1,且图9的步骤S212中燃油切断标志F_FC变为1。从而,满足图6的步骤S104中所有汽缸休缸的预定条件,当步骤S106中的所有汽缸休缸释放条件不被满足时,并从这一时间点到经过预定时间段之后(TALCSDLY1),步骤S109中滑阀的螺线管被打开为ON状态。此外,油压(POIL)变为等于或大于预定值(#POILCSH),并进而,在经过预定时间段(TCSDLY1)之后,在步骤S113中的所有汽缸休缸执行标志F_ALCS变为1,并进行所有汽缸休缸操作。
结果是,在图17所示的时序图中,燃油切断标志F_FC和减速再生允许标志F_MADECRGN变为1,因而所有汽缸休缸执行标志F_ALCS变为1。此外,当在所有汽缸休缸操作期间制动被踩踏(F_BKSW=1)时,再生量增加等于这一步骤S304的量。
此外,在所有汽缸休缸操作期间,当满足图6的步骤S106中所有汽缸休缸释放条件时,从这一时间点到经过预定的时间段(TCSDLY2),在步骤S116滑的到螺线管处于OFF状态操作。而且,油压变为等于或小于预定的值(#POILCSL),在步骤S120,所有汽缸休缸执行标志F_ALCS变为0,且车辆开始常规操作。因而,如图9所示,在所有汽缸休缸执行标志F_ALCS和所有汽缸休缸螺线管标志F_ALCSSOL都变为0之后,如图17中的时序图所示,燃油切断标志F_FC(和减速再生允许标志F_MADECRN)变为0,就是说,燃油切断被释放,且常规操作开始。
此外,由于汽缸休缸已经减少的发动机摩擦的降低部分在步骤S309作为再生的增加部分(所有汽缸休缸再生计算值CSRGN)被计算,且通过在步骤S303和S304计算的减速再生计算值DECRGN而增加这一部分的再生是可行的,并且进而,在经与车速相关的预定时间(TDECRGN)(S257)之后再生逐步进行(S261和S265)。
此外,因为是根据所有汽缸休缸执行(F_ALCS=1)期间以及休缸释放(F_ALCS=0)期间发动机进气负压而进行再生量的补偿,并不考虑所有汽缸休缸执行标志F_ALCS的值,因而补偿是根据在常规操作与休缸操作之间变化的进气管负压作出的。
根据上述实施例,基本上在减速燃油切断期间当由所有汽缸休缸执行标志F_ALCS(=1)标识所有汽缸休缸时,因为通过可变阀定时机构VT,与休缸一同进行燃油切断,这样,限制了燃油消耗量,并能够实现油耗的改进。
由所有汽缸休缸执行标志F_ALCS(=0)标识的所有汽缸休缸的释放,以及在由所有汽缸休缸操作螺线管标志F_ALCSSOL检测到可变阀定时机构VT的非操作状态的情形下,向发动机供油的停止被释放,因而再打开成为可能。这样,在所有汽缸休缸期间不供给燃油,从所有汽缸休缸操作到常规操作的移动可在不浪费燃油的情形下平滑地进行。
此外,由于休缸已经减少的发动机摩擦的降低部分作为再生(所有汽缸再生计算值CSRGN)的增加量的部分被计算,这部分被添加到减速再生计算值DECRNG,并且这一再生是在经过与车速相关的预定时间段(TDECRGN)之后逐步进行,这样即使同时进行休缸,也能够实现油耗的改进。从而,降低的减速感觉可按常规操作的降低量被等同地置为常规操作。因而,驾驶者感觉不到不舒服。
而且,因为是根据所有汽缸休缸执行及所有汽缸休缸释放(S311)期间的发动机进气负压进行再生量的补偿,因而不论所有汽缸休缸的执行,能够对应于在常规操作和休缸操作期间变化的进气管负压进行补偿,这样在所有汽缸休缸操作和常规操作之间,可获得连续减速的感觉。
此外,因为所有汽缸休缸执行标志F_ALCS为1,就是说,在所有汽缸休缸操作期间,变速箱的传动比是这样变化的,使得CVT输入侧的传动比改变而发动转速NE增加,通过增加发动机转速能够保证对应于由于休缸而降低的发动机摩擦的再生能。因而,在CVT车辆中,没有减速感觉的负面效果,且能够实现再生的增加和电动机热损耗的降低。
如上所述,根据本发明的第一方面,能够通过补偿量计算装置,计算由于休缸而降低的发动机摩擦的降低部分而进行再生,并使再生量的这一部分增加达到通过再生量计算装置计算的再生量,因而能够实现了燃油消耗的改进,并同时即使当进行休缸时,由于再生量的增加,由此而降低的减速感觉等同于常规操作期间的感觉,于是就有这样的效果,即驾驶者不会受到任何不舒服感觉的负面影响。
根据本发明的第二方面,除了能够通过进行休缸而增加再生量之外,还能够抑制燃油的消耗量,于是有能够实现油耗改进的效果。
根据本发明的第三方面,还有这样的效果,即通过根据车速设置与车速相关的预定的时间而增加设置的自由度。此外,通过逐步进行再生量的补偿,在进入减速模式的情形下以及在离开减速模式的情形下,有能够实现平滑过渡的效果。
根据本发明的第四方面,因为能够进行与常规操作及休缸操作之间变化的进气管负压相关的补偿,于是能够获得休缸操作与常规操作之间连续减速的感觉。
根据本发明的第五方面,因为能够通过增加发动机转速而保证对应于由于休缸已经降低的发动机摩擦的再生能,故有这样的效果,即减速的感觉不会受到负面的影响,并能够实现再生量的增加及电动机热负荷的降低。
Claims (5)
1.用于混合式动力车的控制设备,包括作为该混合式动力车驱动力的发动机和电动机,其中电动机根据该混合式动力车的减速状态执行再生制动,且所述发动机包括汽缸,每一汽缸能够执行休缸操作,用于混合式动力车的该控制设备包括:
休缸操作判断装置,用于根据车辆的驱动条件判断是否适于执行休缸操作;
再生量计算装置,用于检测车辆的减速状态,并用于计算减速期间由所述电动机产生的再生量,且该再生量计算装置还包括,
补偿量计算装置,用于根据发动机转速计算与汽缸操作能相关的补偿量,其在电动机处于减速再生时通过由所述休缸操作判断装置执行的休缸操作被回收;以及
其中所述电动机执行再生,以产生由所述再生量计算装置和所述补偿量计算装置两者判断的再生能的量。
2.根据权利要求1的混合式动力车控制设备,其中控制设备还包括供油停止装置,该装置在车辆处于减速状态时停止向发动机的供油。
3.根据权利要求1的混合式动力车控制设备,其中由所述补偿量计算装置进行的再生量补偿,在经过取决于车速的预定的时间段之后逐渐执行。
4.根据权利要求1的混合式动力车控制设备,其中所述补偿量计算装置还包括进气负压补偿装置,用于根据在由休缸判断装置执行休缸操作时以及释放休缸操作时的发动机进气负压来执行再生量的补偿。
5.根据权利要求1的混合式动力车控制设备,其中当所述休缸操作判断装置判断能够执行休缸操作时,变速器的传动比被改变以增加输入侧的传动比,使得发动机转速增加。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001043932A JP3892236B2 (ja) | 2001-02-20 | 2001-02-20 | ハイブリッド車両の制御装置 |
| JP043932/2001 | 2001-02-20 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1371822A CN1371822A (zh) | 2002-10-02 |
| CN1241767C true CN1241767C (zh) | 2006-02-15 |
Family
ID=18906018
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB02103396XA Expired - Fee Related CN1241767C (zh) | 2001-02-20 | 2002-02-04 | 混合式动力车的控制设备 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US6934610B2 (zh) |
| EP (1) | EP1232895B1 (zh) |
| JP (1) | JP3892236B2 (zh) |
| KR (1) | KR100460676B1 (zh) |
| CN (1) | CN1241767C (zh) |
| CA (1) | CA2367223C (zh) |
| DE (1) | DE60219090T2 (zh) |
Families Citing this family (55)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3415601B2 (ja) * | 2000-10-23 | 2003-06-09 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| JP3701568B2 (ja) * | 2001-02-20 | 2005-09-28 | 本田技研工業株式会社 | ハイブリッド車両におけるアシスト制御装置 |
| US6994069B2 (en) * | 2002-05-23 | 2006-02-07 | Honda Giken Kogyo Kabushiki Kaisha | Hydraulic control device for valve trains of engine |
| JP2004274842A (ja) * | 2003-03-06 | 2004-09-30 | Suzuki Motor Corp | 交流発電機の発電制御装置 |
| US6998727B2 (en) * | 2003-03-10 | 2006-02-14 | The United States Of America As Represented By The Administrator Of The Environmental Protection Agency | Methods of operating a parallel hybrid vehicle having an internal combustion engine and a secondary power source |
| US6876098B1 (en) | 2003-09-25 | 2005-04-05 | The United States Of America As Represented By The Administrator Of The Environmental Protection Agency | Methods of operating a series hybrid vehicle |
| JP4678139B2 (ja) * | 2004-05-10 | 2011-04-27 | トヨタ自動車株式会社 | 自動車の暖房制御システム |
| US7131708B2 (en) * | 2004-05-14 | 2006-11-07 | General Motors Corporation | Coordinated regenerative and engine retard braking for a hybrid vehicle |
| US7600381B2 (en) * | 2005-02-17 | 2009-10-13 | Gm Global Technology Operations, Inc. | Electric hybrid powertrain system having a magnetorheological fluid clutch |
| FR2882699B1 (fr) * | 2005-03-01 | 2008-10-31 | Peugeot Citroen Automobiles Sa | Procede de decollage d'un vehicule en pente montante et ou lourdement charge |
| JP4361509B2 (ja) * | 2005-04-13 | 2009-11-11 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| JP2007232098A (ja) * | 2006-03-01 | 2007-09-13 | Toyota Motor Corp | 車両の制御装置 |
| US7750796B2 (en) * | 2006-06-27 | 2010-07-06 | Gm Global Technology Operations, Inc. | Regenerative braking halo and method |
| JP2008039030A (ja) * | 2006-08-04 | 2008-02-21 | Toyota Motor Corp | 車両制御装置 |
| US7828693B2 (en) * | 2007-06-20 | 2010-11-09 | Ford Global Technologies, Llc | Negative driveline torque control incorporating transmission state selection for a hybrid vehicle |
| JP5115133B2 (ja) * | 2007-10-12 | 2013-01-09 | 株式会社エクォス・リサーチ | 車両 |
| JP5139765B2 (ja) * | 2007-10-12 | 2013-02-06 | ボッシュ株式会社 | 還元剤供給システムの制御装置及び制御方法 |
| KR100962783B1 (ko) | 2007-12-13 | 2010-06-09 | 현대자동차주식회사 | 하이브리드 차량의 모터 토크 제한 방법 |
| US9174626B2 (en) | 2008-01-25 | 2015-11-03 | GM Global Technology Operations LLC | Methods and systems for controlling shifting between operating modes in hybrid vehicles |
| JP5619627B2 (ja) * | 2008-02-08 | 2014-11-05 | ボルボ テクノロジー コーポレイション | ハイブリッド車両を動作させる方法及びハイブリッド車両 |
| KR101007747B1 (ko) * | 2008-08-08 | 2011-01-14 | 콘티넨탈 오토모티브 시스템 주식회사 | 하이브리드 자동차의 브레이크 제어 장치 및 방법 |
| US8055422B2 (en) * | 2008-08-08 | 2011-11-08 | GM Global Technology Operations LLC | Vehicle deceleration rate control method and apparatus |
| JP4722171B2 (ja) * | 2008-09-04 | 2011-07-13 | ジヤトコ株式会社 | 車両の制御装置 |
| US20100240491A1 (en) * | 2009-03-17 | 2010-09-23 | Parag Vyas | System for vehicle propulsion having and method of making same |
| US8535200B2 (en) * | 2009-03-17 | 2013-09-17 | General Electric Company | Vehicle propulsion system having a continuously variable transmission and method of making same |
| US20110165829A1 (en) * | 2010-02-25 | 2011-07-07 | Ford Global Technologies, Llc | Automotive vehicle and method for operating climate system of same |
| JP5213914B2 (ja) * | 2010-06-15 | 2013-06-19 | アイシン・エィ・ダブリュ株式会社 | ハイブリッド駆動装置 |
| US8467923B2 (en) | 2010-11-19 | 2013-06-18 | Delphi Technologies, Inc. | Vehicle deceleration rate control during deceleration fuel cutoff by varying generation electric load |
| US9242640B2 (en) * | 2011-02-16 | 2016-01-26 | Suzuki Motor Corporation | Hybrid vehicle control device |
| US8798891B2 (en) * | 2011-07-06 | 2014-08-05 | GM Global Technology Operations LLC | System and method for increasing operating efficiency of a hybrid vehicle |
| DE102012111139A1 (de) | 2012-11-20 | 2014-05-22 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | Verfahren zum Betreiben eines Hybridfahrzeugs |
| JP5947737B2 (ja) * | 2013-03-07 | 2016-07-06 | 日立オートモティブシステムズ株式会社 | 内燃機関の可変動弁システム、制御装置及び可変動弁装置 |
| TWI491796B (zh) * | 2013-09-18 | 2015-07-11 | 預防引擎熄火之方法 | |
| US10190481B2 (en) * | 2013-10-02 | 2019-01-29 | GM Global Technology Operations LLC | Minimum power consumption for cool down diagnostic based on cylinder deactivation |
| KR101575409B1 (ko) | 2013-10-07 | 2015-12-07 | 현대자동차주식회사 | 자동차의 회생제동허용량 결정 시스템 및 방법 |
| KR20150056284A (ko) * | 2013-11-15 | 2015-05-26 | 주식회사 현대케피코 | 실린더 디액티베이션 기구의 고착 진단방법 |
| US9371785B2 (en) | 2014-11-14 | 2016-06-21 | Robert Bosch Gmbh | Vehicle and method of operating |
| US9657664B2 (en) * | 2015-02-02 | 2017-05-23 | Ford Global Technologies, Llc | Method and system for maintaining a DFSO |
| JP6206455B2 (ja) * | 2015-07-08 | 2017-10-04 | トヨタ自動車株式会社 | 車両の制御装置 |
| KR101704251B1 (ko) * | 2015-08-27 | 2017-02-07 | 현대자동차주식회사 | Hev 차량의 엔진정지 제어시 변속방법 및 변속장치 |
| US9702304B1 (en) * | 2016-03-30 | 2017-07-11 | Toyota Motor Engineering & Manufacturing North America, Inc. | Automatic engine braking and increased regenerative capacity hybrid vehicle |
| JP6767673B2 (ja) * | 2016-09-29 | 2020-10-14 | 三菱自動車工業株式会社 | ハイブリッド車両の制御装置 |
| DE102016222827A1 (de) | 2016-11-18 | 2018-05-24 | Audi Ag | Verfahren zum Betreiben eines Kraftfahrzeugs und Kraftfahrzeug |
| JP6442553B2 (ja) * | 2017-04-24 | 2018-12-19 | 本田技研工業株式会社 | 車両の制御装置 |
| US10131354B1 (en) * | 2017-05-16 | 2018-11-20 | Ford Global Technologies, Llc | Engine speed stabilization |
| DE102018117360A1 (de) * | 2017-12-04 | 2019-06-06 | Schaeffler Technologies AG & Co. KG | Verfahren zum Steuern eines Verbrennungsmotors eines Hybridantriebsstrangs |
| US10780772B2 (en) * | 2018-10-23 | 2020-09-22 | Ge Global Sourcing Llc | Vehicle engine assist system |
| JP2021055601A (ja) * | 2019-09-30 | 2021-04-08 | いすゞ自動車株式会社 | 内燃機関のオイル供給装置 |
| US10995682B1 (en) * | 2019-11-06 | 2021-05-04 | Ford Global Technologies, Llc | System and method for reducing engine temperature |
| CN113494367B (zh) * | 2020-04-01 | 2023-01-13 | 长城汽车股份有限公司 | 一种发动机的停缸控制方法、系统及车辆 |
| US11378022B2 (en) | 2020-08-03 | 2022-07-05 | Cummins Inc. | Systems and methods for controlling cylinder deactivation operation in electrified powertrains |
| JP7280902B2 (ja) | 2021-01-28 | 2023-05-24 | 本田技研工業株式会社 | 車両制御装置 |
| US20210291669A1 (en) * | 2021-05-27 | 2021-09-23 | Munir Ibrahim Vohra | YW Extended Range Battery |
| CN113847126B (zh) * | 2021-09-10 | 2022-09-27 | 东风汽车集团股份有限公司 | 混动车辆及其ecu,gpf的被动再生控制方法和装置 |
| US11499490B1 (en) | 2021-12-07 | 2022-11-15 | Cummins Inc. | Systems and methods to minimize emissions spikes when reactivating or deactivating a combustion cylinder |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05133258A (ja) * | 1991-11-07 | 1993-05-28 | Mazda Motor Corp | エンジンの燃料制御装置 |
| JPH0658187A (ja) * | 1992-08-05 | 1994-03-01 | Unisia Jecs Corp | 内燃機関の燃料供給停止制御装置 |
| JP3209046B2 (ja) * | 1995-06-20 | 2001-09-17 | トヨタ自動車株式会社 | ハイブリッド車 |
| DE19532164A1 (de) * | 1995-08-31 | 1997-03-06 | Clouth Gummiwerke Ag | Antriebssystem, insbesondere für ein Kraftfahrzeug, und Verfahren zum Betreiben desselben |
| KR970075268A (ko) * | 1996-05-21 | 1997-12-10 | 김영귀 | 자동차의 엔진연료 차단제어방법 |
| JP3612938B2 (ja) * | 1997-05-26 | 2005-01-26 | 日産自動車株式会社 | 車両用内燃機関の自動停止始動装置 |
| JP3847438B2 (ja) * | 1998-02-03 | 2006-11-22 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| JP3565042B2 (ja) | 1998-09-22 | 2004-09-15 | 日産自動車株式会社 | ハイブリッド車両の制御装置 |
| JP3978899B2 (ja) | 1998-10-16 | 2007-09-19 | トヨタ自動車株式会社 | 車両用回生制動装置 |
| JP3633357B2 (ja) * | 1999-03-31 | 2005-03-30 | スズキ株式会社 | 車両のモータ駆動制御装置 |
| JP3542932B2 (ja) * | 1999-08-04 | 2004-07-14 | 本田技研工業株式会社 | ハイブリッド車両の減速回生/充電の許可判定方法および装置 |
| JP2001107765A (ja) * | 1999-10-08 | 2001-04-17 | Honda Motor Co Ltd | ハイブリッド車両の制御装置 |
-
2001
- 2001-02-20 JP JP2001043932A patent/JP3892236B2/ja not_active Expired - Fee Related
-
2002
- 2002-01-07 US US10/036,412 patent/US6934610B2/en not_active Expired - Lifetime
- 2002-01-10 CA CA002367223A patent/CA2367223C/en not_active Expired - Fee Related
- 2002-02-04 CN CNB02103396XA patent/CN1241767C/zh not_active Expired - Fee Related
- 2002-02-18 DE DE60219090T patent/DE60219090T2/de not_active Expired - Lifetime
- 2002-02-18 EP EP02003659A patent/EP1232895B1/en not_active Expired - Lifetime
- 2002-02-20 KR KR10-2002-0009045A patent/KR100460676B1/ko not_active IP Right Cessation
Also Published As
| Publication number | Publication date |
|---|---|
| US6934610B2 (en) | 2005-08-23 |
| CA2367223C (en) | 2005-08-09 |
| EP1232895B1 (en) | 2007-03-28 |
| EP1232895A3 (en) | 2006-01-25 |
| EP1232895A2 (en) | 2002-08-21 |
| DE60219090D1 (de) | 2007-05-10 |
| JP2002247709A (ja) | 2002-08-30 |
| KR20020068303A (ko) | 2002-08-27 |
| US20020115532A1 (en) | 2002-08-22 |
| CN1371822A (zh) | 2002-10-02 |
| CA2367223A1 (en) | 2002-08-20 |
| JP3892236B2 (ja) | 2007-03-14 |
| DE60219090T2 (de) | 2008-01-31 |
| KR100460676B1 (ko) | 2004-12-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1241767C (zh) | 混合式动力车的控制设备 | |
| CN1240566C (zh) | 混合型动力汽车的助推控制装置 | |
| CN1232414C (zh) | 混合车辆的控制装置 | |
| CN1265985C (zh) | 多动力型汽车的控制装置 | |
| CN1246168C (zh) | 用于混合动力型车辆的控制装置 | |
| CN1254392C (zh) | 混合动力车辆的控制设备 | |
| CN1081741C (zh) | 混合型车用电动机的控制装置 | |
| CN1313724C (zh) | 减速停缸发动机车辆中的故障检测装置 | |
| CN1262438C (zh) | 双动力型车辆用的控制装置 | |
| CN1251903C (zh) | 混合驱动车辆的控制装置 | |
| CN1093803C (zh) | 混合型车用控制装置 | |
| CN1303312C (zh) | 用于内燃机的增压器 | |
| CN1319773C (zh) | 用来控制电动车再生制动的方法和装置 | |
| CN1514907A (zh) | 混合动力车辆的控制装置 | |
| CN1280129C (zh) | 车辆控制设备 | |
| CN1230321C (zh) | 通过电动机转矩制动的车辆和控制车辆的方法 | |
| CN1289334C (zh) | 车辆驱动力控制装置 | |
| CN1251899C (zh) | 用于混合车辆的控制装置 | |
| CN1095529C (zh) | 转矩传输系统的控制装置 | |
| CN1294064A (zh) | 混合动力车辆的控制装置 | |
| CN1527903A (zh) | 混合机车的控制装置 | |
| CN1819441A (zh) | 用于计算/控制发电力矩的方法和设备 | |
| CN101062685A (zh) | 车辆用行驶控制装置 | |
| CN101062654A (zh) | 混合动力车辆的驱动控制装置 | |
| CN101045451A (zh) | 混合动力车辆的传动状态切换控制装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20060215 Termination date: 20200204 |