CN101355338B - 电动机控制装置 - Google Patents
电动机控制装置 Download PDFInfo
- Publication number
- CN101355338B CN101355338B CN2008101443020A CN200810144302A CN101355338B CN 101355338 B CN101355338 B CN 101355338B CN 2008101443020 A CN2008101443020 A CN 2008101443020A CN 200810144302 A CN200810144302 A CN 200810144302A CN 101355338 B CN101355338 B CN 101355338B
- Authority
- CN
- China
- Prior art keywords
- mentioned
- voltage
- phase
- motor
- voltage instruction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/06—Rotor flux based control involving the use of rotor position or rotor speed sensors
- H02P21/10—Direct field-oriented control; Rotor flux feed-back control
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
- H02P21/141—Flux estimation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters with pulse width modulation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M1/00—Details of apparatus for conversion
- H02M1/0003—Details of control, feedback or regulation circuits
- H02M1/0009—Devices or circuits for detecting current in a converter
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Ac Motors In General (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Abstract
本发明提供一种电动机控制装置,其具备:电动机电流检测机构,其根据在驱动三相式电动机的逆变器与直流电源之间流动的电流,检测在上述电动机中流动的电动机电流;电压指令矢量生成机构,其根据上述电动机的电枢线圈的交链磁通,生成表示对上述电动机的施加电压应追踪的电压的矢量的电压指令矢量;电压指令矢量校正机构,其校正所生成的上述电压指令矢量;和磁通推定机构,其根据上述电动机电流和校正后的电压指令矢量来推定上述交链磁通,根据上述校正后的电压指令矢量,通过上述逆变器控制上述电动机。
Description
技术领域
本发明涉及驱动控制电动机的电动机控制装置,尤其是采用1分路(shunt)电流检测方式的电动机控制装置。
背景技术
为了向电动机提供三相交流电力来控制电动机,需要检测U相,V相和W相这3相中2相份的电流(例如U相电流和V相电流)。为了检测2相份的电流,通常要使用2个电流传感器(电流互感器等),但2个电流传感器的使用导致安装电动机的系统全体成本提高。
因此,以往,建议了通过1个电流传感器检测逆变器和直流电源间的母线电流(直流电流),根据其检测的母线电流,检测2相份的电流的方式。该方式,被称为1分路电流检测方式(单分路电流检测方式),该方式的基本原理如例如日本国专利第2712470号公报中所述。
图23表示采用1分路电流检测方式的以往的电动机驱动系统的全体框图。逆交器(PWM逆变器)202,具备3相份具有上臂和下臂的半桥电路,通过根据由控制部203提供的三相电压指令值来开关各臂,将来自直流电源204的直流电压变换为三相交流电压。该三相交流电压被提供给三相永磁同步电动机201,驱动控制电动机201。
将连接逆变器202内的各下臂和直流电源204的线路称为母线213。电流传感器205,将表示流经母线213的母线电流的信号传递到控制部203。控制部203,通过在适当的时刻取样电流传感器205的输出信号,来检测电压电平变为最大的相(最大相)的相电流和变为最小的相(最小相)的相电流,即,检测2相份的电流。
在不同相电压间的电压电平能充分分开时,可以根据电流传感器205的输出信号检测2相份的电流,但如果电压的最大相和中间相接近或者电压的最小相和中间相接近,则不能检测2相份的电流(并且,包含不能检测这2相份的电流的说明的1分路电流检测方式的说明,参照图4等,在后面进行)。
在此,提出了下述方法,即在1分路电流检测方式中,在不能检测2相份的电流期间,根据3相的门(gate)信号,校正针对逆变器内各臂的PWM信号的脉冲宽度的方法。
图24表示对应该校正的通常的电压指令值(脉冲宽度)的校正例。在图24中,横轴表示时间,220u、220v和220w表示U相、V相和W相的电压电平。各相的电压电平遵从对于各相的电压指令值(脉冲宽度),因此可以认为两者等效。如图24所示,校正各相电压指令值(脉冲宽度),以使电压的“最大相和中间相”以及“最小相和中间相”不接近规定间隔以下。由此,越是不能检测2相份的电流,越不能接近各相电压,可以稳定地检测2相份的电流。
例如,日本国特开2003-189670号公报公开了进行这种电压校正的技术。但是在该公报所述的方法中,需要根据3相电压指令值(脉冲宽度)的关系确定校正量,尤其是在施加电压低时产生需要对全部3相进行校正的情况,而校正处理变得繁杂。
另一方面,作为与进行矢量控制的情况相比能够降低转矩波动的控制方法,提出了直接转矩控制。图25表示实现直接转矩控制的以往电动机驱动系统的全体构成框图。这种电动机驱动系统在例如文献“井上、其他3人,‘直接トルク制御による埋入磁石同期モ一タのトルクリプル低減と弱ぁ磁束制御(Torque ripple reduction,and flux-weakening control forinterior permanent magnet synchronous motor based on direct torque control’平成18年電気学会全国大会講演論文集,電気学会,平成18年3月,第4分冊,4-106,p166”中被公开。
在图25电动机驱动系统中,根据由2个电流传感器得到的2相电流(iα和iβ)和由2个电压检测器得到的2相电压(vα和vβ),推定电动机的电枢线圈的交链磁通的α轴成分Φα和β轴成分Φβ的同时,推定电动机的产生转矩T。另外,计算交链磁通的矢量的从α轴方向看的相位θS。这些值根据下式(A-1)~(A-4)计算。其中,Rα表示相当于电枢线圈的每一相的电阻值,PN表示电动机的极对数,Φα|t=0以及Φβ|t=0,分别表示时刻t=0时Φα和Φβ的值(即,Φα和Φβ的初始值)。
φα=∫(vα-Raiα)dt+φα|t=0 …(A-1)
φβ=∫(vβ-Raiβ)dt+φβ|t=0 …(A-2)
θS=tan-1(φβ/φα) …(A-3)
T=PN(φαiβ-φβiα) …(A-4)
并且,根据推定的转矩T和转矩指令值T*之间的转矩误差ΔT(=T*-T),和由相位θS,Φα和Φβ形成的交链磁通矢量的大小(即,交链磁通的振幅)的目标值|ΦS *|,计算Φα和Φβ的目标值Φα *和Φβ *,进行磁通控制,以使Φα和Φβ跟随Φα *和Φβ *。即,计算二相电压(vα和vβ)的目标值(vα *和vβ *),以使Φα和Φβ跟随Φα *和Φβ *,根据此二相电压的目标值生成三相电压指令值(vu *,vv *和vw *),提供给逆变器。
直接转矩控制中,用于推定磁通的电压和电流,通常由检测器检测。可以使用电压指令值计算用于推定磁通的电压,但对直接转矩控制应用1分路电流检测方式时,需要对电压指令值添加校正,因此考虑这一点,如果不形成控制系统,则会产生对推定磁通产生误差等不良情况。
另外,不仅在直接转矩控制中应用1分路电流检测方式时,对于进行磁通推定的电动机控制装置,应用1分路电流检测方式时也产生同样的问题。
发明内容
在此,本发明目的在于提供一种可以抑制在组合经由交链磁通的电动机控制和1分路电流检测方式时产生的交链磁通的推定误差的电动机控制装置以及电动机驱动系统。
本发明中的电动机控制装置,特征在于具备:电动机电流检测机构,其根据在驱动三相式电动机的逆变器与直流电源之间流动的电流,检测在上述电动机中流动的电动机电流;电压指令矢量生成机构,其根据上述电动机的电枢线圈的交链磁通,生成表示对上述电动机的施加电压应追踪的电压的矢量的电压指令矢量;电压指令矢量校正机构,其校正所生成的上述电压指令矢量;和磁通推定机构,其根据上述电动机电流和校正后的电压指令矢量来推定上述交链磁通,根据上述校正后的电压指令矢量,通过上述逆变器控制上述电动机。
实现直接转矩控制等时,需要推定交链磁通。一方面,根据驱动在三相式电动机的逆变器和直流电压之间流动的电流来检测电动机电流时,需要对电压指令进行校正。担忧根据该校正对交链磁通产生推测误差,但如果根据校正后的电压指令推定交链磁通,则可以抑制由校正引起的交链磁通的推测误差。
另外,如果在电压指令矢量阶段进行校正处理,可以容易得到用于交链磁通的推定的校正后的电压指令矢量,能够省略逆变换三相电压的工序,并且在图25的电动机驱动系统中也不需要以前需要的用于检测三相电压的电压检测器。
具体地说,例如,由上述电压指令矢量生成机构生成的上述电压指令矢量,为旋转坐标上的电压指令矢量,上述电压指令矢量校正机构,在将其旋转坐标上的电压指令矢量变换为三相固定坐标上的三相电压指令值的过程中,校正上述旋转坐标上的电压指令矢量,该电动机控制装置,通过向上述逆变器提供与校正后的电压指令矢量相对应的上述三相电压指令值,来控制上述电动机。
更具体的说,例如,由上述电压指令矢量生成机构生成的上述电压指令矢量,为根据以规定的固定轴作为基准的上述电压指令矢量的相位,每电气角60度逐步地旋转的ab坐标上的二相的电压指令矢量。
由此,通过校正电压指令矢量的坐标轴成分这样的简单的处理,可以实现期望的校正。
即,例如上述电压指令矢量校正机构,根据形成上述ab坐标上的二相电压指令矢量的坐标轴成分的大小,判断是否进行校正,需要校正时,通过校正上述坐标轴成分,校正上述ab坐标上的二相电压指令矢量。
另外,具体的说,例如,该电动机控制装置,还具备将由上述电压指令矢量校正机构校正后的ab坐标上的二相的电压指令矢量,变换为以固定的α轴和β轴为坐标轴的αβ坐标上的电压指令矢量的坐标变换机构,上述磁通推定机构,根据上述电动机电流和上述αβ坐标上的电压指令矢量来推定上述交链磁通。
或者具体的说,例如,该电动机控制装置,还具备将由上述电压指令矢量校正机构校正后的ab坐标上的二相电压指令矢量变换为以固定的α和β轴为坐标轴的αβ坐标上的电压指令矢量的坐标变换机构,上述磁通推定机构,根据上述电动机电流的上述αβ坐标上的坐标轴成分,和上述αβ坐标上的电压指令矢量,推定上述交链磁通的上述αβ坐标上的坐标轴成分。
另外例如,该电动机控制装置,还具备根据上述电动机电流和推定的上述交链磁通,推定上述电动机产生的转矩的转矩推定机构,根据推定的上述转矩,执行对上述电动机的直接转矩控制。
例如,该电动机控制装置,还具备根据推定的上述交链磁通推定上述电动机的转子位置的转子位置推定机构,来代替上述的机构,根据推定的上述转子位置,执行对上述电动机的矢量控制。
本发明相关的电动机驱动系统,其特征在于,具备:三相式电动机;驱动上述电动机的逆变器;和通过控制上述逆变器来控制上述电动机的上述电动机控制装置。
通过本发明,可以抑制组合经由交链磁通的推定的电动机控制和1分路电流检测方式的情况下产生的交链磁通的推测误差。
本发明的意义或效果,通过以下所示的实施方式的说明会变得更明确。但是,以下的实施方式,终究只是本发明的一个实施方式,本发明或各构成要件的用语的意义,并不局限于以下实施方式所述的内容。
附图说明
图1是本发明实施方式涉及的电动机驱动系统的整体构成框图。
图2是表示对图1电动机施加的三相交流电压的典型例子的图。
图3是将对于图1的电动机的通电模式,各通电模式和母线电流之间的关系作为表来表示的图。
图4是表示图1电动机中的各相电压的电压水平和载波信号之间的关系,以及,对应此关系的PWM信号和母线电流的波形的图。
图5(a)~(d)是图4的各时刻的图1电枢线圈周围的等效电路图。
图6是表示将图1电动机中的各相电压的高低关系的组合(模式)和各组合中检测的电流的相作为表来表示的图。
图7是表示U相轴,V相轴和W相轴,与α轴和β轴之间的关系的图。
图8是表示本发明第1实施例涉及的U相轴、V相轴和W相轴与α轴和β轴,以及电压矢量的关系的空间矢量图。
图9是用于说明由本发明实施方式定义的α轴的图。
图10是表示本发明实施方式中的电压矢量的校正处理顺序的框图。
图11(a)是表示图10的校正处理前的ab坐标上的电压矢量的轨迹图。
图11(b)是表示图10的校正处理后的ab坐标上的电压矢量的轨迹图。
图12(a)是表示图10的校正处理前的αβ坐标上的电压矢量的轨迹图。
图12(b)是表示图10的校正处理后的αβ坐标上的电压矢量的轨迹图。
图13是表示经由图10的校正处理得到的U相电压,V相电压和W相电压的电压波形图。
图14是本发明第1实施例相关的电动机驱动系统的构成框图。
图15是图14的磁通指令计算部的内部框图。
图16是图14的电压指令计算部的内部框图。
图17是表示与图14的电压指令计算部的运算相关的交链磁通和电压的关系的矢量图。
图18是本发明第2实施例相关的电动机驱动系统的构成框图。
图19是U相轴,V相轴和W相轴,与d轴之间的关系的图。
图20是图18的位置/速度推定器的内部的框图。
图21是图18的电压指令计算部的内部的框图。
图22是表示考虑与图9的α轴之间的关系,分解转子的相位(θ)的情况的图。
图23是采用1分路电流检测方式的以往电动机驱动系统的整体构成框图。
图24是表示以往技术涉及的采用1分路电流检测方式时的电压指令值(脉冲宽度)的校正例的图。
图25是实现直接转矩控制的以往的电动机驱动系统的整体构成框图。
具体实施方式
以下,参照附图,对符合本发明的实施方式进行具体地说明。在参照的各图中,相同的部分赋予相同的符号,原则上省略与相同部分相关的重复说明。稍后,说明第1和第2实施例,但首先对这些各实施例中通用的事项和各实施例中参照的事项进行说明。
图1是本发明实施方式中的电动机驱动系统的框图构成图。图1的电动机驱动系统,具备:三相永磁同步电动机1(以下,简单地记为“电动机1”);PWM(Pulse Width Modulation)逆变器2(以下,简单地称为“逆变器2”);控制部3;直流电源4;和,电流传感器5。直流电源4,将负输出端子4b作为低电压侧,在正输出端子4a和负输出端子4b之间输出直流电压。图1的电动机驱动系统,采用1分路电流检测方式。
电动机1,具有设置了永磁体的转子6,和设置了U相、V相和W相的电枢线圈7u、7v和7w的定子7。电枢线圈7u、7v和7w与中性点14在中心被Y型结线。在电枢线圈7u、7v和7w中,中性点14的相反侧的非结线端分别与端子12u、12v和12w连接。
逆变器2具备U相用半桥电路、V相用半桥电路和W相用半桥电路。各半桥电路具有一对开关元件。在各半桥电路中,一对开关元件被串联连接在直流电源4的正输出端子4a和负输出端子4b之间,向各半桥电路施加来自直流电源4的直流电压。
U相用半桥电路由高电压侧的开关元件8u(以下,也称为上臂8u)和低电压侧的开关元件9u(以下,也称为下臂9u)构成。V相用半桥电路,由高电压侧的开关元件8v(以下,也称为上臂8v)和低电压侧的开关元件9v(以下,也称为下臂9v)构成。W相用半桥电路由高电压侧的开关元件8w(以下,也称为上臂8w)和低电压侧的开关元件9w(以下,也称为下臂9w)构成。另外,开关元件8u、8v、8w、9u、9v和9w将从直流电源4的低电压侧向高电压侧的方向作为正向而分别并联地连接二极管10u、10v、10w、11u、11v和11w。各二极管起到作为续流二极管(フリ一ホイ一ルダイオ一ド)功能。
串联连接的上臂8u和下臂9u的连接点、串联连接的上臂8v和下臂9v的连接点、串联连接的上臂8w和下臂9w的连接点,分别连接在端子12u,12v和12w上。并且,在图1中,作为各开关元件表示了场效应晶体管,但也可以将它们置换为IGBT(绝缘栅双极晶体管)等。
逆变器2,根据由控制部3提供的三相电压指令值生成对各相的PWM信号(脉冲宽度调制信号),通过将该PWM信号提供给逆变器2内的各开关元件的控制端子(基极或者栅极),从而使各开关元件进行开关动作。由控制部3向逆变器2提供的三相电压指令值,由U相电压指令值vu *,V相电压指令值vv *和W相电压指令值vw *构成,由vu *、vv *和vw *分别表示U相电压vu、V相电压vv和W相电压vw的电压电平(电压值)。U相电压vu、V相电压vv和W相电压vw表示从图1的中性点14看的端子12u、12v和12w的电压。逆变器2根据vu *、vv *和vw *控制各开关元件的开(导通)或者关(非导通)。
如果忽略用于防止同时导通同一相的上臂和下臂的空载时间,则在各半桥电路中,上臂为导通时,下臂为非导通,上臂为非导通时,下臂为导通。以下的说明,忽略上述空载时间而进行的。
向逆变器2施加的来自直流电源4的直流电压,根据逆变器2内各开关元件的开关动作,例如,变换为被PWM调制(脉冲宽度调制)的三相交流电压。通过对电动机1施加该三相交流电压,使与三相交流电压相应的电流流过各电枢线圈(7u,7v和7w)来驱动电动机1。
电流传感器5,检测流过逆变器2的母线13的电流(以下,称为“母线电流”)。由于母线电流具有直流成分,因此也可以将其解释为直流电流。在逆变器2中,下臂9u,9v和9w的低电压侧被共通连接并与直流电源4的负输出端子4b连接。下臂9u,9v和9w的低电压侧共同连接的配线是母线13,电流传感器5被串联在母线13上。电流传感器5,将表示检测的母线电流(检测电流)的电流值的信号传递到控制部3。控制部3一边参照电流传感器5的输出信号等,一边生成和输出上述三相电压指令值。并且,电流传感器5是例如分路电阻或者电流互感器(current transformer)等。另外,也可以不将电流传感器5设置在连接下臂9u、9v和9w的低电压侧和负输出端子4b的配线(母线13)上,而设置在连接上臂8u、8v和8w的高电压侧和正输出端子4a的配线上。
这里,使用图2,图3,图4,图5(a)~(d)和图6对母线电流和各相电枢线圈中流动的相电流之间的关系等进行说明。将流经电枢线圈7u,7v和7w的电流,分别称为U相电流,V相电流和W相电流,将这些中的每个(或者统称这些)为相电流(参照图1)。另外,在相电流中,设从端子12u,12v或12w向中性点14流入的方向的电流的极性为正,从中性点14流出的方向的电流的极性为负。
图2表示对电动机1施加的三相交流电压的典型例子。在图2中,100u,100v和100w分别表示应该对电动机1施加的U相电压、V相电压和W相电压的波形。将每个U相电压、V相电压和W相电压(或者统称这些)为相电压。电动机1中流过正弦波状电流时,逆变器2的输出电压变为正弦波状。并且,图2的各相电压变为理想的正弦波,但是在本实施方式中,实际上该正弦波被加上了变形(详情在后面进行描述)。
如图2所示,U相电压、V相电压以及W相电压之间的电压电平的高低关系,随时间的推移而变化。该高低关系由三相电压指令值决定,逆变器2根据三相电压指令值确定对各相的通电模式。图3将该通电模式作为表格来表示。从图3的左侧第1列~第3列表示通电模式。第4列在后面进行描述。
通电模式有:
U、V和W相的下臂全部导通的通电模式“LLL”;
W相上臂导通,且U和V相的下臂导通的通电模式“LLH”;
V相的上臂导通,且U和W相的下臂导通的通电模式“LHL”;
V和W相上臂导通,且U相的下臂导通的通电模式“LHH”;
U相的上臂导通,且V和W相的下臂导通的通电模式“HLL”;
U和W相的上臂导通,且V相的下臂导通的通电模式“HLH”
U相和V相的上臂导通,且W相的下臂导通的通电模式“HHL”
U、V和W相的上臂全部导通的通电模式“HHH ”(省略上臂和下臂的符号(8u等)进行记录)。
图4表示进行3相调制时的各相电压的电压电平与载波信号之间的关系,以及,与此关系相对应的PWM信号和母线电流的波形。各相电压的电压电平高低关系有各种变化,但是为了说明的具体化,图4着眼于图2所示的某时刻101。即,图4表示U相电压的电压电平最大且W相电压的电压电平最小的情况。将电压电平最大的相称为“最大相”,将电压电平最小的相称为“最小相”,将电压电平不是最大也不是最小的相称为“中间相”。在图4所示的状态中,最大相、中间相和最小相分别为U相、V相和W相。在图4中,符号CS表示与各相电压的电压电平相比较的载波信号。载波信号为周期性的三角波信号,其信号的周期称为载波周期。并且,由于载波周期远短于图2所示的三相交流电压的周期,因此如果在图2上表示图4所示的载波信号的三角波,此三角波看起来成为1根线。
再参照图5(a)~(d)对相电流和母线电流之间的关系进行说明。图5(a)~(d)是图4各时刻的电枢线圈周边的等效电路。
将各载波周期的开始时刻,即载波信号处于最低水平的时刻称为T0。在时刻T0中,各相的上臂(8u,8v和8w)被导通。此时,如图5(a)所示,由于变为形成短路电路且流向直流电源4的电流不能出入的状态,因此母线电流变为零。
逆变器2,参照vu *、vv *和vw *,比较各相电压的电压电平和载波信号。并且,在载波信号的电平(电压电平)上升过程中,如果最小相的电压电平达到与载波信号交叉的时刻T1,则最小相的下臂被导通,如图5(b)所示,最小相的电流作为母线电流流动。图4所示的例情况,由于在从时刻T1开始到到达后面所述的时刻T2之间,W相的下臂9w变为导通,因此w相电流(极性为负)作为母线电流流动。
并且,如果载波信号的电平上升,中间相的电压电平到达与载波信号交叉的时刻T2,则最大相的上臂导通且中间相和最小相的下臂导通,如图5(c)所示,最大相的电流作为母线电流流动。图4所示例子的情况下,由于在从时刻T2开始到到达后面所述的时刻T3为止的期间,U相的上臂8u导通且V相和W相的下臂9v和9w导通,因此U相电流(极性为正)作为母线电流流动。
并且,如果载波信号的电平上升,达到最大相的电压电平与载波信号交叉的时刻T3,则所有相的下臂导通,如图5(d)所示,形成短路电路并变为流向直流电源4的电流不能出入的状态,因此母线电流变为零。
在时刻T3和后面所述的时刻T4的中间时刻,载波信号达到最大水平后,载波信号的电平开始下降。在载波信号的电平下降过程中,如图5(d),(c),(b)和(a)所示的状态,按该顺序到来。即,在载波信号的电平下降过程中,如果将最大相的电压电平与载波信号交叉的时刻(timing)作为T4,中间相的电压电平与载波信号交叉的时刻作为T5,最小相的电压电平与载波信号交叉的时刻作为T6,下一个载波周期的开始时刻作为T7,则时刻T4-T5间、时刻T5-T6间、时刻T6-T7间分别变为与时刻T2-T3间、时刻T1-T2间和时刻T0-T1间相同的通电模式。
因此,例如如果在时刻T1-T2间或者T5-T6间检测母线电流,则能够根据母线电流检测最小相的电流,如果在时刻T2-T3间或者T4-T5间检测母线电流,则能够根据母线电流检测最大相的电流。并且,中间相的电流,能够利用三相电流的总和为0而通过计算得到。图3的表中第4列表示,以带有电流极性方式表示各通电模式中作为母线电流流动的电流的相。例如,在与图3表中的第8行对应的通电模式“HHL”中,W相电流(极性为负)作为母线电流流动。
并且,从载波周期去除时刻T1和T6之间期间后的期间,表示对于最小相的PWM信号的脉冲宽度,从载波周期去除时刻T2和T5之间期间后的期间表示对于中间相的PWM信号的脉冲宽度,从载波周期去除时刻T3和T4之间期间后的期间表示对于最大相的PWM信号的脉冲宽度。
以U相为最大相且W相为最小相的情况为例,但最大相、中间相和最小相的组合有6组。图6以表格表示该组合。U相电压、V相电压和W相电压分别由vu、vv和vw表示时,将
vu>vv>vw成立的状态称为第1模式,
vv>vu>vw成立的状态称为第2模式,
vv>vw>vu成立的状态称为第3模式,
vw>vv>vu成立的状态称为第4模式,
vw>vu>vv成立的状态称为第5模式,
vu>vw>vv成立的状态称为第6模式。
图4和图5(a)~(d)所示的例子,对应第1模式。另外,在图6中,也表示了各模式中检测出的电流的相。
U相电压指令值vu *、V相电压指令值vv *和W相电压指令值vw *,具体的说,分别被作为计数器的设定值Cnt U、Cnt V和Cnt W表示。相电压越高,就提供越大的设定值。例如,在第1模式中,Cnt U>Cnt V>CntW成立。
设置在控制部3中的计数器(图中没有表示),在每个载波周期中,以时刻T0为基准,计数值从0开始累加计数。并且,在此计数值达到CntW的时刻,从W相的上臂8w导通的状态切换为下臂9w导通的状态,在此计数值达到Cnt V的时刻,从V相的上臂8v导通的状态切换为下臂9V导通的状态,在此计数值达到Cnt U的时刻,从U相的上臂8u导通的状态切换为下臂9u导通的状态。载波信号达到最大电平后,计数值被递减计数,进行逆向的切换动作。
因此,在第1模式中,上述计数值达到Cnt W的时刻对应时刻T1,达到Cnt V的时刻对应于时刻T2,达到Cnt U的时刻对应时刻T3。因此,在第1模式中,在计数器值累加计数的状态下,在计数器值比Cnt W大并且比Cnt V小的时刻,通过采样电流传感器5的输出信号而能够检测流动的W相电流(极性为负)作为母线电流,在计数值比Cnt V大并且比CntU小的时刻,通过采样电流传感器5的输出信号,能够检测流动的U相电流(极性为正)作为母线电流。
基于相同的考虑,如图6所示,在第2模式中,上述计数值达到Cnt W的时刻对应时刻T1,达到Cnt U的时刻对应时刻T2,达到Cnt V的时刻对应时刻T3。因此,在第2模式中,在计数器值被累加计数的状态下,根据计数值比Cnt W大并且比Cnt U小的时刻的母线电流能够检测W相电流(极性为负),根据计数值比Cnt U大并且比Cnt V小的时刻的母线电流能够检测V相电流(极性为正)。对于第3~第6模式也一样。
另外,由ST1表示检测时刻T1-T2间的最小相的相电流的取样时刻(例如时刻T1和T2的中间时刻),由ST2表示检测时刻T2-T3间的最大相的相电流的取样时刻(例如,为时刻T2和T3的中间时刻)。
并且,根据作为三相电压指令值(vu *,vv *和vw *)的计数器的设定值Cnt U、Cnuv和Cnt W,特别指定对于各相的PWM信号的脉冲宽度(和占空比)。
根据上述原理能够由母线电流检测各相电流,但参照图4可以理解,例如如果最大相和中间相的电压电平接近,则时刻T2-T3间和T4和T5间的时间长度变短。通过将来自图1的电流传感器5的模拟输出信号变换为数字信号检测母线电流,但该时间长度极短时,不能确保必需的A/D变换时间和振铃(ringing)(由开关引起而产生的电流脉动)的收敛时间,就不能检测最大相的相电流。同样,如果最小相和中间相的电压电平接近,则不能检测最小相的相电流。如果不能实际测量2相份的电流,就不能再现3相份的相电流,不能良好地控制电动机1。
在本实施方式中,在认为不能实际测量这样的2相份的电流的期间中,校正表示对电动机1的施加电压的电压矢量(电压指令矢量),将各相电压间的电压电平差保持为规定值以上,由此消除上述的不良情况。
在进行该校正方法的详细说明之前,对定义的轴和状态量(状态变量)等进行说明。图7表示与U相、V相和W相的电枢线圈固定轴即U相轴、V相轴和W相轴相互垂直的α轴和β轴之间的关系。V相轴的相位是以U相轴为基准,电气角前进120度,W相轴的相位是以V相轴为基准,电气角再前进120度。在包含图7的坐标关系图以及后面所述的图8和图9的空间矢量图中,逆时针方向对应相位的前进方向。α轴与U相轴一致,β轴以α轴为基准前进电气角90度。U相轴、V相轴和W相轴以及α轴和β轴,与转子6的旋转无关,是被固定的固定轴。另外,选α轴和β轴作为坐标轴的坐标称为αβ坐标。
另外,由Vα表示由逆变器2对电动机1施加的整体的电动机电压,由Ia表示由逆变器2向电动机1提供的整体的电动机电流。并且,分别由α轴电压vα和β轴电压vβ表示电动机电压Va的α轴成分和β轴成分,分别由α轴电流iα和β轴电流iβ表示电动机电流Ia的α轴成分和β轴成分,分别由U相电压vu,V相电压vv和W相电压vw表示电动机电压Va的U相轴成分,V相轴成分和W相轴成分,分别由U相电流iu,V相电流iv和W相电流iw表示电动机电流Ia的U相轴成分、V相轴成分和W相轴成分。
(校正方法的说明)
对电压矢量的校正方法进行说明。图8表示U相轴,V相轴和W相轴以及α轴和β轴,与电压矢量之间的关系的空间矢量图。带符号110的矢量为电压矢量。由θβ表示从β轴逆时针方向看的电压矢量110的相位,由θα表示从α轴逆时针方向看的电压矢量110的相位。对于图8所示的角度量(nπ/3)在后面进行描述。
电压矢量110是将对电动机1施加的电压(电动机电压Va)作为二维矢量表现的,例如着眼于αβ坐标时,电压矢量110的α轴成分和β轴成分分别为vα和vβ。实际上,表示电动机驱动系统内中,计算表示α轴电压和β轴电压的目标值的α轴电压指令值和β轴电压指令值,由这些表示电压矢量110。因此,电压矢量也能由电压指令矢量替代。
U相轴附近、V相轴附近和W相轴附近的画上阴影的星号状的区域111,表示不能检测2相份的电流的区域。例如,在V相电压和W相电压接近而不能检测2相份的电流时,电压矢量110位于U相轴附近,在U相电压和W相电压接近而不能检测2相份的电流时,电压矢量110位于V相轴附近。
这样,不可能检测2相份的电流的区域111,以U相轴为基准每隔电气角60度存在,电压矢量110如果位于此区域111,就不能检测2相份的电流。因此,电压矢量位于区域111内时,也可以校正电压矢量,以使电压矢量变为区域111外的矢量。
为了执行该校正,现在,着眼于不可能检测2相份的电流的区域111的特性,考虑每隔电气角60度逐步地旋转的坐标。将该坐标称为a b坐标(并且,由后面所述的第2实施例描述的d q坐标是连续旋转的坐标)。a b坐标是将相互垂直的a轴和b轴作为坐标轴。图9表示a轴能够取到的6个轴。a轴,根据以规定的固定轴为基准的电压矢量110的相位成为a1轴~a6轴中的任意一个。现在,将该规定的固定轴作为U相轴(=α轴)。于是,a轴,根据相位θα,变为a1~a6轴中的任意一个。a1轴、a3轴和a5轴,分别与U相轴、V相轴和W相轴一致,a2轴、a4轴和a6轴,分别作为a1和a3轴的中间轴,a3轴和a5轴的中间轴以及a5轴和a1轴的中间轴。并且,带有符号131的圆在后面进行描述。
电压矢量110位于带有符号121的范围时,即,
在11π/6≤θα<0,或者,0≤θα<π/6成立时,a轴变为a1轴
电压矢量110位于带有符号122的范围时,即,
π/6≤θα<π/2成立时,a轴变为a2轴
电压矢量110位于带有符号123的范围时,即,
π/2≤θα<5π/6成立时,a轴变为a3轴
电压矢量110位于带有符号124的范围时,即,
5π/6≤θα<7π/6成立时,a轴变为a4轴
电压矢量110位于带有符号125的范围时,即,
7π/6≤θα<3π/2成立是,a轴变为a5轴
电压矢量110位于带有符号126的范围时,即,
3π/2≤θα<11π/6成立时,a轴变为a6轴。
例如,电压矢量110位于图9所示的位置时,a轴变为a4轴。
这样,a轴,伴随电压矢量的旋转,每隔60度逐步地旋转,b轴也与a轴正交,与a轴同时每隔60度逐步地旋转。a轴和b轴都表现为每隔60度被量子化,每隔60度旋转的坐标轴。因此,a轴变为总是位于不能检测2相份的电流的区域的中心。在本校正方法中,将αβ坐标上的电压矢量变换到ab坐标上,参照变换到此ab坐标上的电压矢量的a轴成分和b轴成分,根据需要校正它们(例如,通过校正增大b轴成分)。
对该校正处理的更具体的实现方法进行说明。在a1轴~a6轴中,电压矢量110最近的轴的相位,以U相轴为基准,由(nπ/3)表示(参照图8)。在此,n是(θβ+2π/3)除以π/3时得到的商,或者,是(θα+π/6)除以π/3时得到的商。商是指,忽略余数而表示被除数除以除数得到的值的整数。θβ和θα能够根据下式(1-1a)和式(1-1b)算出。
θβ=tan-1(-vα/vβ) …(1-1a)
θα=tan-1(vβ/vα) …(1-1b)
ab坐标,相当于将αβ坐标旋转角度(nπ/3)后的坐标。因此,捕捉电压矢量110作为ab坐标上的电压矢量,如果将电压矢量110的a轴成分和b轴成分作为a轴电压va和b轴电压vb,则α轴电压vα,β轴电压vβ,a轴电压va和b轴电压vb,满足下式(1-2)的坐标变换式。
并且,参照根据式(1-2)计算的a轴电压va和b轴电压vb,进行校正处理。图10是表示该校正处理的顺序的流程图。在步骤S1中,进行根据式(1-2)的坐标变换。接着,在步骤S2中,进行对va和vb的校正处理。
在步骤S2中,首先,判断b轴电压vb的大小(绝对值)是否比规定的阈值Δ(其中,Δ>0)小。即,判断是否满足下式(1-3)。并且,b轴电压vb的大小比阈值Δ小时且b轴电压vb为正时,校正以使vb变为Δ。b轴电压vb的大小比阈值Δ小时且b轴电压vb为负时,校正以使vb变为(-Δ)。b轴电压vb的大小大于阈值Δ以上时,不对vb实施校正。
另外,在步骤S2中,判断a轴电压va是否也满足下式(1-4)。并且,满足式(1-4)时,校正va以使va与式(1-4)的右边相等。va不满足下式(1-4)时,不对va实施校正。并且,由式(1-4)判断电压矢量110是否包含在图9的圆131的内部。电压矢量110包含在圆131内部的状态,对应三相的相电压相互接近的状态,在该状态中,与b轴电压vb的大小无关,不能检测2相份的电流。
|vb|<Δ …(1-3)
图11(a)和(b)表示步骤S2中校正处理前后的ab坐标上的电压矢量(110)的轨迹。图11(a)表示ab坐标上的校正前的电压矢量轨迹,图11(b)表示ab坐标上的校正后的电压矢量轨迹。并且,分别由vac和vbc表示由步骤S2的校正处理得到的校正后的电压矢量110的a轴成分和b轴成分(实际上没有进行校正时,vac=va且vbc=vb)。图11(a)和(b)例示了b轴电压被校正的情况。图11(a)和(b)各自记录多个表示各时刻的电压的点。对应图11(a)的校正前的电压矢量,位于不能检测2相份的电流的a轴附近的位置,对应图11(b)的校正后的电压矢量,通过对vb的校正而不位于a轴附近。
在步骤S2的校正处理后,转移到步骤S3,将ab坐标上的校正后的电压矢量110变换为αβ坐标上的电压矢量110。分别由vαc和vβc表示由步骤S2的校正处理的校正后的电压矢量110的α轴成分和β轴成分时,步骤S3中的坐标变换,根据式(1-5)进行。
图12(a)和(b)表示上述校正处理前后的αβ坐标上的电压矢量(110)的轨迹。图12(a)表示αβ坐标上的校正前的电压矢量轨迹,图12(b)表示αβ坐标上的校正后的电压矢量轨迹。通过该校正处理,以使作为固定坐标的αβ坐标上,每隔电气角60度存在电压矢量不能位于的区域。校正后的电压矢量(电压指令矢量),最终被变换为U相,V相和W相的各电压成分。图13是横轴取时间来表示经过上述校正处理得到的vu、vv和vw的电压波形的图。在图13中,排列在变形的正弦波上的点群142u表示vu的轨迹,排列在变形的正弦波上的点群142v表示vv的轨迹,排列在变形的正弦波上的点群142w表示vw的轨迹。由图13可知,通过上述的校正处理,能够确保各相电压间的电压差为规定值以上。
以下,例示了第1和第2实施例,作为应用上述校正处理(校正方法)的实施例。并且,某个实施例(例如第1实施例)所记载的事项,只要不矛盾,就可以应用于其他实施例。
(第1实施例)
首先,对第1实施例进行说明。图14是第1实施例相关的电动机驱动系统的构成框图。在图14所示的电动机驱动系统中,实施所谓的直接转矩控制(Direct torque Control)。使用埋入磁铁型电动机等时,磁铁磁通或电感分布中存在高次谐波的情况较多。即例如,交链U相电枢线圈的永磁体的磁通,相对于转子的相位变化,理想地描绘正弦波的波形,但实际上,该波形中包含高次谐波,由此引起由永磁体的旋转所产生的感应电压也变形。同样,电枢线圈的d轴电感或q轴电感都含有高次谐波。已知这样的高次谐波成为转矩波动的原因。
通过矢量控制,控制d轴电流和q轴电流成为固定时,如果磁铁磁通或电感分布中不包含高次谐波,产生转矩变为固定,但实际上,通常由于它们包含高次谐波,因此产生转矩进行脉动。在直接转矩控制中,推定交链定子的电枢线圈的磁通,根据推定磁通和电动机电流,推定转矩直接控制转矩。由于推定磁通中反映了高次谐波的影响,因此转矩的推定中也反映了高次谐波的影响。在直接转矩控制中,由于根据该推定转矩进行控制,因此具有即使在磁铁磁通和电感分布中存在高次谐波时也能够降低转矩脉动的效果。
图14的电动机控制系统具备电动机1,逆变器2,直流电源4和电流传感器5,并且还具备由符号21~30参照的各部位。在第1实施例中,图1的控制部3,由符号21~30参照的各部位而形成。
如上所述,电流传感器5检测母线电流,输出表示该母线电流的电流值的信号。电流检测部21,参照坐标转换器30输出的三相电压指令值vu *,vv *和vw *,指定哪相为最大相、中间相和最小相的同时,确定采样电流传感器5的输出信号的时刻ST1和ST2(参照图6),根据在此时刻ST1和ST2得到的母线电流的电流值(电流传感器5的输出信号值),计算并输出U相电流iu和V相电流iv。此时,根据需要,使用iu+iv+Iv=0的关系式。
如参照图6所说明的那样,vu *,vv *和vw *分别作为计数器的设定值Cnt U,Cnt V和Cnt W表示。电流检测部21,根据vu *,vv *和vw *,判断计数器的设定值Cnt U,Cnt V和Cnt W的大小关系,指定现在时刻属于第1~第6模式中的哪种的同时,考虑指定的模式,确定应该检测母线电流的时刻ST1和ST2。例如,“Cnt U>Cnt V>Cnt W”时,判断现在时刻属于第1模式,将与设定值Cnt W和Cnt V之间对应的时刻规定为ST1,将与设定值Cnt V和Cnt U之间对应的时刻规定为ST2。现在时刻属于第1模式时,由时刻ST1和ST2检测的母线电流,分别是(-iw)和iu。
坐标转换器22,将由电流检测部21检测的三相电流变换为αβ坐标上的二相电流。即,将作为电动机电流Ia的U相轴成分和V相轴成分的iu和iv变换为作为电动机电流Ia的α轴成分和β轴成分的iα和iβ。由该变换得到的iα和iβ,被提供给磁通/转矩推定器23。
将图1的电枢线圈(7u,7v和7w)的交链磁通的α轴成分和β轴成分分别称为α轴磁Φα和β轴磁通Φβ。磁通/转矩推定器23,与图25的电动机驱动系统一样,根据α轴电流,β轴电流以及电压指令矢量进行磁通的推定,但是作为用于该推定的电压指令矢量,使用经过上述校正处理后的电压指令矢量。即,磁通/转矩推定器23,根据来自坐标转换器22的iα和iβ与来自电压指令计算部29的vαc *和vβc *,推定α轴磁通Φα和β轴磁通Φβ。vαc *和vβc *,分别表示应该跟随上述式(1-5)中出现的vαc和vβc的目标值。vαc *和vβc *是形成αβ坐标上的校正后的电压指令矢量的坐标轴成分,但其意义,通过后面所述的电压指令计算部29的说明,会变得更明确。
具体地说,磁通/转矩推定器23根据下式(2-1)以及(2-2),推定Φα和Φβ。然后,磁通/矢量推定器23,根据自身推定的Φα和Φβ,由下式(2-3)计算出由Φα和Φβ形成的交链磁通矢量的以α轴为基准的相位θS,并且由下式(2-4)推定电动机1所产生的转矩T。式(2-1)和(2-2)的各自右边的积分是对时间t的积分,其积分区间,是从作为基准时刻的时刻t=0到现在时刻。
φα=∫(vαc *-Raiα)dt+φα|1=0 …(2-1)
φβ=∫(vβc *-Raiβ)dt+φβ|1=0 …(2-2)
θS=tan-1(φβ/φn) …(2-3)
T=PN(φαiβ-φβiα) …(2-4)
其中,
Ra表示电枢线圈(7u,7v和7w)每一相的电阻值,
PN表示电动机1的极对数,
Φα|t=0和Φβ|t=0分别表示时刻t=0的Φα和Φβ的值(即,Φα和Φβ的初始值)。
另外,后面所述的式子等中出现的状态量的定义也在这里进行。
Ld,Lq分别为d轴电感(电动机1的电枢线圈电感的d轴成分),q轴电感(电动机1的电枢线圈电感的q轴成分),Φα表示由设置在电动机1的转子6上的永磁体产生的电枢交链磁通。
id和iq分别表示作为电动机电压Ia的d轴成分和q轴成分的d轴电流和q轴电流。
d轴是设定为转子6的永磁体的N极方向的轴,q轴是从d轴前进π/2的轴。关于d轴和q轴的说明,由后面所述的第2实施例进行。并且,Ra,Ld,Lq,Φa,PN,Φα|t=0和Φβ|t=0,在电动机驱动系统的设计阶段被预先规定。
减法器24,计算由磁通/转矩推定器23推定的转矩T,和表示转矩T目标值的转矩指令值T*的转矩误差ΔT(T-T*)。在直接转矩控制中,需要与转矩指令值T*同时,提供对于交链磁通的振幅的指令值。由|ΦS *|表示对于该振幅的指令值。|ΦS *|表示由Φα和Φβ形成的交链磁通矢量的大小(即,交链磁通的振幅)的目标值。通常,交链磁通的振幅|ΦS|和转矩T由下式(2-5)和式(2-6)表示。因此例如,要实现最大转矩控制时,通过将用于实现最大转矩控制的d轴电流的计算式(2-7)代入式(2-5)和式(2-6),从事先制作表示|ΦS|和T的关系的表格数据。将该表格数据存放在图14的表格25中,在将|ΦS |和T处理为|ΦS *|和T*的基础上,使用表格25,根据转矩指令值T*算出|ΦS *|。
T=PN(Φaiq-(Lq-Ld)idiq) …(2-6)
由表格25得到的|ΦS *|,提供给磁通指令计算部26。但是在电动机1高速旋转时等,需要弱磁通控制时,由下式(2-8)计算|ΦS *|并将其提供给磁通指令计算部26。其中,ω为电动机1的转子6的旋转中的电气角速度(d轴的电气角速度),Vom,为通过弱磁通控制应该限制的电动机电压Va的限制值。
图15表示磁通指令计算部26的内部框图。图15的磁通指令计算部26,包含由符号35~37参照的各部位。磁通指令计算部26,根据如上所述得到的|ΦS *|、来自磁通/转矩推定器23的θS和来自减法器24的ΔT,计算并输出Φα和Φβ的目标值即α轴磁通指令值Φα *和β轴磁通指令值Φβ *。
具体地说,PI控制部35,进行用于使ΔT收敛于零的比例积分控制,计算与ΔT相对应的相位校正量ΔθS *。由加算器36计算θS和ΔθS *的和(θS+ΔθS *)。该和作为相位指令值θS *(=(θS+ΔθS *))被提供给矢量生成部37。矢量生成部37根据|ΦS *|和θS *,由下式(2-9a)和(2-9b)计算Φα *和Φβ *。
φα *=|φS *|cosθS * …(2-9a)
φβ *=|φS *|sinθS * …(2-9b)
由磁通指令计算部26计算出的Φα *和Φβ *与由磁通/转矩推定器23推定的Φα和Φβ,被提供给减法器27和28。减法器27和28计算偏差(Φα *-Φα)和(Φβ *-Φβ),提供给电压指令计算部29。另外,由坐标转换器22得到的iα和iβ都被提供给电压指令计算部29(图14中省略了其样子)。
图16表示电压指令计算部29的内部框图。图16的电压指令计算部29具备由符号41~44参照的各部位。校正前电压计算部41,根据(Φα *-Φα),(Φβ *-Φβ),iα和iβ,计算α轴电压指令值vα *和β轴电压指令值vβ *以使Φα跟随Φα *且Φβ跟随Φβ *。vα *和vβ *,分别是用于将(Φα *-Φα)和(Φβ *-Φβ)共同收敛于零的vα和vβ的目标值。计算vα *和vβ *(参照下式(2-10)),以使由vα *和vβ *形成的电压指令矢量(vαβ *),变为由Φα和Φβ形成的交链磁通矢量(Φαβ)的时间微分、由iα和iβ形成的电流矢量(iαβ)和Ra产生的电压降矢量的和。通过考虑离散化电动机驱动系统内生成的各值,从而该算出法被更具体化。具体化的算法的说明设在后面。
坐标旋转部42,根据上述式(1-2),将vα *和vβ *变换为va和vb。即,将由vα *和vβ *表示的αβ坐标上的2相的电压指令矢量变换为由va和vb表示的ab坐标上的2相的电压指令矢量(这些电压指令矢量,相当于图8的电压矢量110)。另外,用于式(1-2)的计算的n值,用上式(1-1a)或者(1-1b)来算出。由坐标旋转部42计算的n值,也被用于坐标旋转部44的运算。并且,坐标旋转部42分别使用vα *和vβ *作为式(1-1a),(1-1b)和(1-2)的各自右边的vα和vβ。
成分校正部43,对va和vb实施图10的步骤S2的校正处理,将校正后的va和vb分别作为vac和vbc输出。但是,不需要校正时,变为vac=va且vbc=vb。
坐标旋转部44,根据上述式(1-5),将校正后的a轴电压vac和b轴电压vbc变换为校正后的α轴电压vαc和b轴电压vβc,将得到的vαc和vβc分别作为vαc *和vβc *输出。即,将由vac和vbc表示的校正后的ab坐标上的2相的电压指令矢量,变换为由vαc *和vβc *表示的校正后的αβ坐标上的2相的电压指令矢量。vαc *和vβc *分别表示校正后的电压指令矢量的α轴成分和β轴成分。
由电压指令计算部29(坐标旋转部44)计算的vαc *和vβc *被提供给图14的坐标变换器30。坐标转换器30,将vαc *和vβc *变换成由vu *,vv *和vw *构成的三相电压指令值,将该三相电压指令值输出到逆变器2。逆变器2,根据该三相电压指令值向电动机1提供三相交流电流。由坐标转换器30计算的vu *、vv *和vw *,相当于由vαc *和vβc *表示的电压指令矢量的U相轴成分、V相轴成分以及W相轴成分。
(离散化的计算式)
电动机驱动系统内的计算,在实施中,是根据被离散化的各状态量的瞬时值进行的。在此,考虑由离散化周期Ts离散化由符号21~30参照的各部位的输入值和输出值时,添加关于这些动作的说明。
现在,考虑基准时刻t=0属于第0个周期,并且,现在时刻属于第m个周期的情况(m为自然数)。并且,分别由iu[m]和iv[m]表示第m个周期中的iu和iv,分别由iα[m]和iβ[m]表示基于iu[m]和iv[m]的iα和iβ。并且,由vαc *[m]和vβc *[m]分别表示在第m个周期中从电压指令计算部29输出的vαc *和vβc *,由Φα[m]和Φβ[m]以及θS[m]和T[m]分别表示基于iα[m]和iβ[m]以及vαc *[m]和vβc *[m]的Φα和Φβ以及θS和T。进而由T*[m]表示第m个周期中的T*,由|ΦS *|[m]表示基于T*[m]的|ΦS *|。另外,由ΔT[m]表示基于T*[m]和T[m]的ΔT。
此时,磁通/转矩推定器23,根据与上述式(2-1)~(2-4)相对应的下式(3-1)~(3-4),计算出Φα[m]和Φβ[m]以及θS[m]和T[m]。
θS[m]=tan-1(φβ[m]/φα[m]) …(3-3)
T[m]=PN(φα[m]iβ[m]-φβ[m]iα[m]) …(3-4)
并且,磁通指令计算部26,根据ΔT[m]、θS[m]以及|ΦS *|[m],计算Φα *[m+1]和Φβ *[m+1],减法器27和28计算偏差(Φα *[m+1]-Φα[m])和(Φβ *[m+1]-Φβ[m])。即,根据第m个周期中的ΔT、θS和|ΦS *|确定下一个周期的Φα和Φβ的目标值,求出此目标值与现在时刻的交链磁通瞬时值的偏差。
电压指令计算部29内的校正前电压计算部41(参照图16),为了使第(m+1)个周期中的Φα和Φβ与Φα *[m+1]和Φβ *[m+1]一致,而计算需要的电压指令矢量。即,校正前电压计算部41,根据与上式(2-10)相对应的下式(3-5),计算vα *[m+1]和vβ *[m+1]。然后,电压指令计算部29,根据vα *[m+1]和vβ *[m+1],通过校正处理,计算表示在第(m+1)个周期中应该对电动机1施加的电压的vαc *[m+1]和vβc *[m+1],通过坐标转换器30的坐标变换将这些提供给逆变器2。
由与图17对应的表示交链磁通和电压的关系的差分方程式导出式(3-5)(以及上述式(2-10))。并且,在图17中,Φαβ[m+1]意味着由Φα[m]和Φβ[m]形成的矢量,Φαβ *[m+1]意味着由Φα *[m+1]和Φβ *[m+1]形成的矢量。
这样,在本实施例中,通过设置校正电压矢量(电压指令矢量)的工序,能够可靠地检测电动机电流。并且,通过在容易进行校正的ab坐标上执行该校正处理,简单并且可靠地实现必要的校正。由于在ab坐标中,只要独立地校正电压矢量(电压指令矢量)的坐标轴成分va和vb就可以,因此校正内容简单。尤其是在施加电压低时,需要对全部3相进行校正,但对于这样的情况,校正量的确定也容易。
另外,通过执行直接转矩控制,即使在使用磁铁磁通或电感分布中存在高次谐波的电动机时,也能够降低转矩波动。并且,作为电动机1,除了埋入磁铁型电动机以外,也可以采用同步磁阻电动机或感应电动机。在同步磁阻电动机或誘導电动机中,由于磁铁磁通或电感分布中存在高次谐波,因此通过直接转矩控制,能够得到降低转矩波动的效果。
在本实施例中,为了可靠地检测电动机电流,对电压指令值加以校正。如果使用校正前的电压指令值进行磁通的推定,会产生推定误差,但在本实施例中,由于使用校正后的电压指令值(vαc *和vβc *)推定磁通,因此不会产生由校正引起的推定误差。另外,由于在电压矢量的阶段进行校正处理,因此能够很容易地得到用于磁通推定的校正后的电压指令矢量,不需要将三相电压进行逆变换的工序,并且在图25的电动机驱动系统中也不需要必需的用于检测三相电压的电压检测票。
(第2实施例)
下面,对第2实施例进行说明。第1实施例中定义的符号等,在第2实施例中也通用。图18是第2实施例相关的电动机驱动系统的构成框图。在图18的电动机驱动系统中,通过根据交链磁通的推定值计算转子位置,执行矢量控制。
在对图18各部位进行说明之前,对第2实施例中定义的轴进行说明和对与第2实施例的动作相关的运算式进行导出。参照图19。图19是电动机1的解析模型图。图19表示了U相轴、V相轴和W相轴。6a是这种在电动机1的转子6中设置的永磁体。在与永磁体6a产生的磁通相同速度旋转的旋转坐标系中,将永磁体6a产生的磁通的方向作为d轴。另外,图中没有表示,但取从d轴前进电气角90度的相位作为q轴。d轴和q轴,是旋转坐标系的坐标轴,将这些选为坐标轴的坐标称为d q坐标。
d轴(和q轴)旋转,由ω表示其旋转速度(电气角速度)。另外,由θ表示从U相的电枢线圈固定轴看的逆时针方向的d轴的相位。逆时针方向,与相位前进方向一致。由于相位θ一般被称为转子位置,因此以下将其称为转子位置。
分别由d轴电压vd和q轴电压vq表示由逆变器2对电动机1施加的整个电动机电压Va的d轴成分和q轴成分。另外,在第1实施例中描述了,分别由d轴电流id和q轴电流iq表示由逆变器2向电动机1提供的整体的电动机电流Ia的d轴成分和q轴成分。
分别由d轴电压指令值vd *和q轴电压指令值vq *表示对d轴电压vd和q轴电压vq的指令值。vd *和vq *分别表示vd和vq应该追踪的电压(目标电压值)。
分别由d轴电流指令值id *和q轴电流指令值iq *表示对d轴电流id和q轴电流iq的指令值。id *和iq *分别表示id和iq应该追踪的电流(目标电流值)。
dq坐标上的扩展感应电压方程式由式(4-1)表示,扩展感应电压Eex由式(4-2)表示。并且,下面所述的式中的p为微分算子。如果着眼于αβ坐标,改写式(4-1),则得到式(4-3)。并且,式(4-3)成立,在文献“市川,他4名,‘拡張感应電压モデルに基づく突極型永久磁石同期モ一タのセンサレス制御(Sensorless Contrl of Salient-PolePermanent Magnet Synchronous Motors Using Extended Electromotive ForceModels)’,電学論D,2002年,Vol.122,No.12,P.1088-1096”中也表示了。
Eex=ω((Ld-Lq)id+Φα)-(Ld-Lq)(piq) …(4-2)
将式(4-3)的右边第1项的行列式移到左边后,如果对两边由时间积分,能够得到式(4-4)和(4-5)(由于θ=ωt,如果积分-sinθ变为cosθ/ω,如果积分cosθ,变为sinθ/ω)。但,此时忽略扩展感应电压Eex的iq的微分项(即,式(4-2)的右边第2项)。
∫(vα-Raiα-ω(Ld-Lq)iβ)dt-Ldiα=((Ld-Lq)id+Φa)cosθ=φexα
…(4-4)
∫(vβ+ω(Ld-Lq)iα-Raiβ)dt-Ldiβ=((Ld-Lq)id+Φa)sinθ=φexβ
…(4-5)
如果设置“Eex=Φex/ω”,则Eex表示由作为电动机1的电枢线圈的交链磁通Φex和转子6的旋转产生的感应电压。如果捕捉Eex作为旋转坐标系中的感应电压矢量,则此感应电压矢量变为q轴上的矢量。同样,如果捕捉Φex作为旋转坐标系中的交链磁通矢量,则其交链磁通矢量变为d轴上的矢量。式(4-4)和(4-5)中也出现的Φexα和Φexβ,分别表示Φex的α轴成分和β轴成分。
将α轴作为基准的交链磁通矢量Φex的相位θex由下式(4-6)表示。在第2实施例相关的电动机驱动系统中,推定交链磁通矢量Φex的α轴成分Φexα和β轴成分Φexβ,根据此推定值推定相位θex。如上所述,由于交链磁通矢量Φex应该变为d轴上的矢量,因此推定的θex在理想的情况下与θ一致。在此,根据推定的θex和用于坐标变换的θ之间的差(轴误差),执行PLL(Phase Locked Loop)控制,由此,进行旋转速度和转子位置的推定。旋转速度ω和转子位置θ,根据下式(4-7)和(4-8)推定。其中,Kp和Ki分别是比例积分控制中的比例系数和积分系数,S是拉普拉斯运算子。
θex=tan-1(φexβ/φexα) …(4-6)
ω=(Kp+Ki/s)(θex-θ) …(4-7)
θ=ω/s …(4-8)
对图18的电动机驱动系统的具体动作进行说明。图18的电动机控制系统,具备:电动机1;逆变器2;直流电源4和电流传感器5,并且具备由符号61~70参照的各部位。在第2实施例中,图1的控制部3由符号61~70所参照的各部位形成。
如上所述,电流传感器5,检测母线电流,输出表示该母线电流的电流值的信号。电流检测部61和坐标转换器62,是与图14的电流检测部21和坐标转换器22相同的部位。即,电流检测部61,根据电流传感器5的输出信号值和三相电压指令值vu *、vv *和vw *,与图14的电流检测部21一样,计算并输出U相电流iu和V相电流iv。但是,对于电流检测部61的三相电压指令值vu *、vv *和vw *,从坐标转换器70提供。坐标转换器62,将由电流检测部61计算出的iu和iv变换为iα和iβ。
磁通推定器63根据由坐标转换器62得到的iα和iβ和来自电压指令计算部69的vαc *和vβc *,根据上式(4-4)和(4-5),推定电动机1的交链磁通(即,计算交链磁通Φex的α轴成分Φexα和β轴成分Φexβ)。此时,分别使用vac *和vβc *作为式(4-4)和(4-5)中的vα和vβ。另外,也可以使用由位置/速度推定器64推定的ω。
图20表示位置/速度推定器64的内部框图。图20的位置/速度推定器64具备由符号75~78参照的各部位。θex计算部75,根据由磁通推定器63计算的Φexα和Φexβ,由上述式(4-6)计算相位θex。减法器76,从由θex计算部75输出的θex中减去由积分器78输出的θ,计算轴误差(θex-θ)。PI控制部77,进行使该轴误差(θex-θ)收敛于零的比例积分控制。即进行根据上式(4-7)的运算,由此计算旋转速度ω。积分器78,根据上述式(4-8),通过积分由PI控制部77算出的ω来算出旋转位置θ。由PI控制部77和积分器78计算出的ω和θ被作为位置/速度推定器64推定的选择速度和转子位置。
αβ/dq转换器65,根据由位置/速度推定器64推定的θ,将由坐标转换器62得到的iα和iβ变换为作为dq坐标上的电流成分的id和iq。
电流指令计算部66生成并输出d轴电流指令值id *和q轴电流指令值iq *。例如,生成iq *以使旋转速度ω跟随由外部提供的速度指令值ω*,根据需要,一边参照iq *等,一边生成id *来实现要求的矢量控制(例如最大矢量控制)。
减法器67和68,根据来自αβ/dq转换器65的id和iq以及来自电流指令计算部66的id *和iq *,计算电流误差(id *-id)和(iq *-iq),并将算出结果提供给电压指令计算部69。
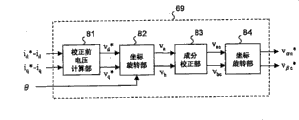
图21表示电压指令计算部69的内部框图。图21的电压指令计算部69,具备由符号81~84参照的各部位。校正前电压计算部81,通过比例积分控制,计算d轴电压指令值vd *和q轴电压指令值vq *以使电流误差(id *-id)和(iq *-iq)收敛于零。vd *和vq *,是用于将(id *-id)和(iq *-iq)同时收敛于零的vd和vq的目标值。
坐标旋转部82,根据由位置/速度推定器64推定的θ,将vd *和vq *变换为va和vb。参照图22,加上对该变换方法的说明。图22是表示U相轴、V相轴和W相轴、与d轴和q轴、以及电压矢量110的关系的空间矢量图。从q轴看的电压矢量110的相位由ε表示。以U相轴为基准的电压矢量110的相位由(θ+ε+π/2)表示。另外,a1轴~a6轴中(参照图9),距电压矢量110最近的轴的相位,以U相轴为基准,由“(n’+2)π/3”表示。其中,n’是(θ+ε)除以π/3时得到的商。
为了方便起见,如图22所示,将θ分解为上述相位(n’+2)π/3,和其相位(n’+2)π/3与θ之间的差分相位θD。这些相位关系由下式(5-1)表示。于是,表示d q坐标上的电压成分的vd和vq,能够由下式(5-2)变换为表示ab坐标上的电压成分的va和vb。另外,ε由下式(5-3)表示。
坐标旋转部82根据上式(5-1)~(5-3)将vd *和vq *变换为va和vb。但是,此时,分别使用vd *和vq *作为式子(5-2)和(5-3)中的vd和vq。具体地说,通过由式(5-3)求出的ε和推定的θ求出n’,将θ和求出的n’代入式(5-1)求出θD。然后,采用求出的θD,根据式(5-2),将vd *和vq *变换为va和vb。但是,在n’和第1实施例中所述的n(图8参照)之间,等式“n’+2=n”成立。由坐标旋转部82求出的n’加上2后的值(即n),被利用于坐标旋转部84中的运算。
由坐标旋转部82得到的va和vb被发送到成分校正部83。成分校正部83和坐标旋转部84,与图16的成分校正部43和坐标旋转部44是一样的。即,成分校正部83,对va和vb实施图10步骤S2中的校正处理,将校正后的va和vb,分别作为vac和vbc输出。但是,不需要校正时,vac=va且vbc=vb。
坐标旋转部84,根据上式(1-5),将校正后的a轴电压vac和b轴电压vbc变换为校正后的α轴电压vαc和β轴电压vβC。,将得到的vac和vbc分别作为vαc *和vβc *输出。
由电压指令计算部69(坐标旋转部84)计算出的vαc *和vβc *,被提供给图18的坐标转换器70。坐标转换器70,将vαc *和vβc *变换为由vu *,vv *和vw *构成的三相电压指令值,将该三相电压指令值输出到逆变器2。逆变器2,根据该三相电压指令值,向电动机1提供三相交流电流。
由于本实施例中,也设置了校正电压矢量(电压指令矢量)的工序,因此能够可靠地检测电动机电流。并且,通过在容易进行该校正处理的ab坐标上执行,简单且可靠地实现需要的校正。在ab坐标中,由于只要独立地校正电压矢量(电压指令矢量)的坐标轴成分va和vb即可,因此校正内容简单。尤其是在施加电压低时需要对全部3相进行校正,但在这样的情况下也容易进行校正量的确定。
在本实施例中,为了可靠地检测电动机电流,而对电压指令值施加校正。如果使用校正前的电压指令值进行磁通的推定,则会产生推定误差,但在本实施例中,由于使用校正后的电压指令值(vαc *和vβc *)推定磁通,因此不会产生由校正导致的推定误差。另外,由于在电压矢量的阶段进行校正处理,因此能够容易得到用于磁通推定的校正后的电压指令矢量,不需要逆变换三相电压这样的工序,并且也不需要图25的电动机驱动系统中必需的用于检测三相电压的电压检测器。
以上描述了应用本发明的电动机驱动系统的实施例,但本发明包含各种变形例(或者其他实施例)。以下,记录注释1~注释5作为变形例(或者其他实施例)或者注释事项。各注释所记载的内容,只要不矛盾,可以任意进行组合。
(注释1)
处理了由逆变器2使用3相调制的情况,但本发明不依赖于调制方式。例如,由逆变器2进行2相调制时,通电模式,与图3所示的3相调制的情况不同。在2相调制中,由于最小相的下臂总是导通,因此与图4中的时刻T0-T1间和T6-T7间相对应的通电模式不存在。但是,结果如果按照由与时刻T1-T2间和T2-T3间相对应的通电模式来检测母线电流,则不改变能够检测最大相和最小相的电流。
(注释2)
在本实施方式相关的电动机驱动系统中,包含上述各种指令值(Φα *,vd *等)或其他状态量(Φα,Φexα等)的应该导出的全部值的导出方法是任意的。即例如,既可以通过控制部3(参照图1)内的运算导出这些,也可以从预先设定好的表格数据中导出。
(注释3)
另外,控制部3(参照图1)的功能的一部分或者全部,使用安装在例如通用微型计算机等中的软件(程序)来实现。使用软件实现控制部3时,表示控制部3的各部分的构成的框图变为功能框图。当然,也可以不是软件(程序),而只由硬件构成控制部3。
(注释4)
例如,能够如下那样考虑。控制部3起到作为电动机控制装置的功能。在电动机控制装置内,认为包含图1等的电流传感器5也可以。根据电流传感器5的输出信号检测电动机电流的电动机电流检测机构,包含图14的电流检测部21或者图18的电流检测部61。另外例如,图16的校正前电压计算部41和坐标旋转部42,或者,图21的校正前电压计算部81和坐标旋转部82,起到作为电压指令矢量生成机构的功能。另外例如,图16的成分校正部43或者图21的成分校正部83,起到作为电压指令矢量校正机构的功能。
(注释5)
并且,在本说明书中,在记述简化方面,通过只有记号(iα等)的标记,有时也有表现对应此记号的状态量(状态变量)等的情况。即,在本说明书中,例如,“iα”和“α轴电流iα”是指相同的量。
本发明适用于使用电动机的所有的电气机器。尤其适用于冰箱用的压缩机、车载用空调、电动车等中。
Claims (9)
1. 一种电动机控制装置,其特征在于,具备:
电动机电流检测机构,其根据在驱动三相式电动机的逆变器与直流电源之间流动的电流,检测在上述电动机中流动的电动机电流;
电压指令矢量生成机构,其根据上述电动机的电枢线圈的交链磁通,生成表示对上述电动机的施加电压应追踪的电压的矢量的电压指令矢量;
电压指令矢量校正机构,其校正所生成的上述电压指令矢量;和
磁通推定机构,其根据上述电动机电流和校正后的电压指令矢量来推定上述交链磁通,
根据上述校正后的电压指令矢量,通过上述逆变器控制上述电动机。
2. 根据权利要求1所述的电动机控制装置,其特征在于,
由上述电压指令矢量生成机构生成的上述电压指令矢量,是旋转坐标上的电压指令矢量,
上述电压指令矢量校正机构,在将此旋转坐标上的电压指令矢量变换为三相的固定坐标上的三相电压指令值的过程中,校正上述旋转坐标上的电压指令矢量,
该电动机控制装置,通过将与校正后的电压指令矢量相对应的上述三相电压指令值提供给上述逆变器,来控制上述电动机。
3. 根据权利要求1所述的电动机控制装置,其特征在于,
由上述电压指令矢量生成机构生成的上述电压指令矢量,是按照以规定的固定轴为基准的上述电压指令矢量的相位,以每电气角60度逐步旋转的a b坐标上的二相的电压指令矢量。
4. 根据权利要求3所述的电动机控制装置。其特征在于,
上述电压指令矢量校正机构,根据形成上述ab坐标上的二相电压指令矢量的坐标轴成分的大小来判断是否需要校正,需要校正时,通过校正上述坐标轴成分,来校正上述ab坐标上的二相的电压指令矢量。
5. 根据权利要求3所述的电动机控制装置,其特征在于,
还具备坐标变换机构,其将由上述电压指令矢量校正机构校正后的ab坐标上的二相的电压指令矢量,变换为以固定的α和β轴为坐标轴的αβ坐标上的电压指令矢量,
上述磁通推定机构,根据上述电动机电流和上述αβ坐标上的电压指令矢量来推定上述交链磁通。
6. 根据权利要求3所述的电动机控制装置,其特征在于,
还具备坐标变换机构,其将由上述电压指令矢量校正机构校正后的ab坐标上的二相的电压指令矢量,变换为以固定的α和β轴为坐标轴的αβ坐标上的电压指令矢量,
上述磁通推定机构,根据上述电动机电流的上述αβ坐标上的坐标轴成分和上述αβ坐标上的电压指令矢量,推定上述交链磁通的上述αβ坐标上的坐标轴成分。
7. 根据权利要求1所述的电动机控制装置,其特征在于,
还具备转矩推定机构,其根据上述电动机电流和推定的上述交链磁通来推定上述电动机产生的转矩,
根据推定的上述转矩对上述电动机执行直接转矩控制。
8. 根据权利要求1所述的电动机控制装置,其特征在于,
还具备根据推定的上述交链磁通推定上述电动机的转子位置的转子位置推定机构,
根据推定的上述转子位置对上述电动机执行矢量控制。
9. 一种电动机驱动系统,其特征在于,具备:
三相式电动机;
驱动上述电动机的逆变器;以及
通过控制上述逆变器来控制上述电动机的权利要求1所述的电动机控制装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007195544 | 2007-07-27 | ||
| JP2007195544A JP4961292B2 (ja) | 2007-07-27 | 2007-07-27 | モータ制御装置 |
| JP2007-195544 | 2007-07-27 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN101355338A CN101355338A (zh) | 2009-01-28 |
| CN101355338B true CN101355338B (zh) | 2011-03-16 |
Family
ID=40139151
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2008101443020A Expired - Fee Related CN101355338B (zh) | 2007-07-27 | 2008-07-25 | 电动机控制装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7898197B2 (zh) |
| EP (1) | EP2026460B1 (zh) |
| JP (1) | JP4961292B2 (zh) |
| CN (1) | CN101355338B (zh) |
Families Citing this family (43)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7629761B2 (en) * | 2007-07-13 | 2009-12-08 | Xerox Corporation | System for measuring current in multiple motor coils using a single sensing element |
| JP5453729B2 (ja) * | 2008-04-14 | 2014-03-26 | 株式会社ジェイテクト | モータ制御装置および電動パワーステアリング装置 |
| ITPD20090140A1 (it) * | 2009-05-15 | 2010-11-16 | Reel S R L Unipersonale | Gruppo refrigerante |
| JP5335078B2 (ja) * | 2009-05-27 | 2013-11-06 | 三菱電機株式会社 | 同期電動機の磁極位置推定装置 |
| JP2011004506A (ja) * | 2009-06-18 | 2011-01-06 | Sanyo Electric Co Ltd | モータ制御装置 |
| US8508166B2 (en) | 2009-08-10 | 2013-08-13 | Emerson Climate Technologies, Inc. | Power factor correction with variable bus voltage |
| US8264192B2 (en) | 2009-08-10 | 2012-09-11 | Emerson Climate Technologies, Inc. | Controller and method for transitioning between control angles |
| US8698433B2 (en) * | 2009-08-10 | 2014-04-15 | Emerson Climate Technologies, Inc. | Controller and method for minimizing phase advance current |
| JP2011050178A (ja) * | 2009-08-27 | 2011-03-10 | Sanyo Electric Co Ltd | モータ制御装置及び発電機制御装置 |
| EP2512026A4 (en) * | 2009-12-08 | 2013-03-27 | Mitsubishi Electric Corp | POWER CONVERSION DEVICE |
| US9054613B2 (en) * | 2010-06-25 | 2015-06-09 | Toyota Jidosha Kabushiki Kaisha | Motor drive apparatus and vehicle with the same mounted thereon |
| JP5691272B2 (ja) * | 2010-07-13 | 2015-04-01 | 日産自動車株式会社 | 電力変換システム |
| JP5194083B2 (ja) * | 2010-09-22 | 2013-05-08 | 山洋電気株式会社 | 電気機器の永久磁石の劣化判定方法及び装置 |
| JP4911271B1 (ja) * | 2010-12-24 | 2012-04-04 | トヨタ自動車株式会社 | トルク検出装置 |
| WO2012157039A1 (ja) * | 2011-05-13 | 2012-11-22 | 株式会社日立製作所 | 同期電動機の駆動システム |
| CN102320252B (zh) * | 2011-06-27 | 2016-01-27 | 杭州阔博科技有限公司 | 电动自行车控制方法 |
| US8860342B2 (en) | 2011-09-15 | 2014-10-14 | Curtiss-Wright Electro-Mechanical Corporation | System and method for controlling a permanent magnet motor |
| JP5416183B2 (ja) * | 2011-09-30 | 2014-02-12 | 東芝シュネデール・インバータ株式会社 | 永久磁石同期電動機の制御装置 |
| CN102497078B (zh) * | 2011-12-02 | 2013-09-25 | 刘贵平 | 永磁直流电动机 |
| CN103875177B (zh) * | 2012-01-11 | 2016-10-26 | 日本电产株式会社 | 马达控制器 |
| CN102832874B (zh) * | 2012-02-24 | 2014-12-31 | 株洲南车时代电气股份有限公司 | 一种电机控制系统及方法 |
| US9634593B2 (en) | 2012-04-26 | 2017-04-25 | Emerson Climate Technologies, Inc. | System and method for permanent magnet motor control |
| GB2503039B (en) * | 2012-06-15 | 2020-05-27 | Danfoss Drives As | Method for controlling a synchronous reluctance electric motor |
| GB2503040B (en) * | 2012-06-15 | 2020-05-06 | Danfoss Drives As | Variable torque angle for electric motor |
| US9240749B2 (en) | 2012-08-10 | 2016-01-19 | Emerson Climate Technologies, Inc. | Motor drive control using pulse-width modulation pulse skipping |
| WO2014033959A1 (ja) * | 2012-09-03 | 2014-03-06 | 東芝三菱電機産業システム株式会社 | 同期電動機の駆動装置 |
| JP5757304B2 (ja) * | 2012-11-01 | 2015-07-29 | 株式会社デンソー | 交流電動機の制御装置 |
| DE112013005863T5 (de) * | 2012-12-06 | 2015-08-20 | Nidec Corporation | Motorsteuerung |
| GB201301259D0 (en) * | 2013-01-24 | 2013-03-06 | Rolls Royce Plc | Method of controlling an ac machine and controller for controlling an ac machine |
| JP6166601B2 (ja) * | 2013-07-02 | 2017-07-19 | パナソニック株式会社 | モータ制御装置及び発電機制御装置 |
| JP6206767B2 (ja) * | 2013-12-25 | 2017-10-04 | パナソニックIpマネジメント株式会社 | モータ制御装置及び発電機制御装置 |
| KR102286371B1 (ko) * | 2014-06-19 | 2021-08-05 | 현대모비스 주식회사 | 모터 온도 변화 제어 장치 및 방법 |
| JP6451984B2 (ja) * | 2014-12-26 | 2019-01-16 | 日本電産株式会社 | モータコントローラ |
| JP6418093B2 (ja) * | 2015-07-16 | 2018-11-07 | 株式会社デンソー | 電力変換装置 |
| CN105141200B (zh) * | 2015-08-04 | 2019-04-09 | 矽力杰半导体技术(杭州)有限公司 | 一种永磁同步电机的驱动电路及驱动方法 |
| US9774287B1 (en) * | 2016-07-14 | 2017-09-26 | GM Global Technology Operations LLC | Modification of stator current for enhanced flux weakening |
| CN107404271B (zh) * | 2017-08-21 | 2019-11-26 | 西安交通大学 | 一种异步电机参数在线识别系统及方法 |
| US10218301B1 (en) * | 2018-01-09 | 2019-02-26 | Mitsubishi Electric Research Laboratories, Inc. | System and method for speed sensorless motor drives |
| CN108336929B (zh) * | 2018-03-30 | 2020-04-10 | 江苏美的清洁电器股份有限公司 | 无刷直流电机的转子定位方法、定位装置和控制系统 |
| US10727770B2 (en) | 2018-09-27 | 2020-07-28 | Tmeic Corporation | Control device for power conversion device, and motor drive system |
| JP7349321B2 (ja) * | 2019-10-29 | 2023-09-22 | シナノケンシ株式会社 | 電動機の界磁位置検出方法 |
| US11165381B2 (en) * | 2019-11-27 | 2021-11-02 | Infineon Technologies Austria Ag | Speed contant control and power constant control of a permanent magnet synchronous motor |
| CN114257134B (zh) * | 2021-12-07 | 2023-08-22 | 江苏大学 | 一种双三相同步磁阻电机谐波抑制的直接转矩控制方法 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1481604A (zh) * | 2000-12-18 | 2004-03-10 | ��ʽ���簲����� | 感应电机的速度推定值校正方法及其装置 |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2712470B2 (ja) * | 1989-01-23 | 1998-02-10 | 松下電器産業株式会社 | インバータ装置の電流検出装置 |
| FR2665589B1 (fr) * | 1990-08-01 | 1992-10-09 | Alsthom Gec | Procede et dispositif d'estimation de flux d'induction magnetique d'un moteur asynchrone, en vue notamment de la commande de ce moteur par regulation de flux. |
| US5481168A (en) * | 1993-01-29 | 1996-01-02 | Hitachi, Ltd. | Electric vehicle torque controller |
| JPH10108500A (ja) * | 1996-09-27 | 1998-04-24 | Railway Technical Res Inst | 3相交流電動機の制御装置 |
| KR19990086188A (ko) * | 1998-05-26 | 1999-12-15 | 윤종용 | 유도 전동기에서의 고정자 및 회전자 저항값 추정방법 |
| JP3710621B2 (ja) * | 1998-05-29 | 2005-10-26 | 三菱電機株式会社 | 誘導電動機の制御装置 |
| KR100312771B1 (ko) * | 1998-12-15 | 2002-05-09 | 장병우 | 엘리베이터의정전운전제어장치및방법 |
| JP3485844B2 (ja) * | 1999-09-10 | 2004-01-13 | 勲 高橋 | 電動機の制御装置 |
| JP4245777B2 (ja) * | 2000-05-25 | 2009-04-02 | 三菱電機株式会社 | 誘導電動機の制御装置および制御方法 |
| KR100371369B1 (ko) * | 2000-08-18 | 2003-02-06 | 엘지산전 주식회사 | 유도 전동기의 벡터 제어 시스템 |
| KR100428505B1 (ko) * | 2001-07-06 | 2004-04-28 | 삼성전자주식회사 | 유도전동기의 속도 및 회전자 자속 추정방법 |
| JP3931079B2 (ja) * | 2001-12-14 | 2007-06-13 | 松下電器産業株式会社 | 電動機駆動装置及びそれを用いた冷凍装置 |
| JP4370754B2 (ja) * | 2002-04-02 | 2009-11-25 | 株式会社安川電機 | 交流電動機のセンサレス制御装置および制御方法 |
| JP4059039B2 (ja) * | 2002-08-30 | 2008-03-12 | 株式会社安川電機 | 同期電動機の制御装置 |
| US7075266B2 (en) | 2003-03-28 | 2006-07-11 | Hitachi, Ltd. | Apparatus for controlling an a. c. motor |
| JP4600726B2 (ja) | 2004-03-18 | 2010-12-15 | 富士電機システムズ株式会社 | 三相インバータ装置 |
| JP4672392B2 (ja) | 2005-02-25 | 2011-04-20 | 株式会社東芝 | インバータ装置 |
| JP2007014114A (ja) * | 2005-06-30 | 2007-01-18 | Matsushita Electric Ind Co Ltd | Pwm信号補正手段 |
| JP4800861B2 (ja) * | 2006-06-21 | 2011-10-26 | 三菱電機株式会社 | 交流回転機の制御装置 |
| DE102006052042A1 (de) * | 2006-10-30 | 2008-05-15 | Bombardier Transportation Gmbh | Steuerung und/oder Regelung eines 3-Phasen-Stromrichters für den Betrieb einer Asynchronmaschine |
| WO2008065978A1 (fr) * | 2006-11-28 | 2008-06-05 | Kabushiki Kaisha Yaskawa Denki | Dispositif de commande de moteur à induction et son procédé de commande |
| KR101340527B1 (ko) * | 2007-05-30 | 2013-12-11 | 엘지전자 주식회사 | 모터 드라이버 시스템 및 모터 드라이버 제어방법 |
-
2007
- 2007-07-27 JP JP2007195544A patent/JP4961292B2/ja active Active
-
2008
- 2008-07-24 EP EP08013379.6A patent/EP2026460B1/en active Active
- 2008-07-24 US US12/178,983 patent/US7898197B2/en not_active Expired - Fee Related
- 2008-07-25 CN CN2008101443020A patent/CN101355338B/zh not_active Expired - Fee Related
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1481604A (zh) * | 2000-12-18 | 2004-03-10 | ��ʽ���簲����� | 感应电机的速度推定值校正方法及其装置 |
Non-Patent Citations (2)
| Title |
|---|
| JP特开2005-269768A 2005.09.29 |
| JP特开2006-238637A 2006.09.07 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4961292B2 (ja) | 2012-06-27 |
| EP2026460A3 (en) | 2017-03-01 |
| US20090026988A1 (en) | 2009-01-29 |
| CN101355338A (zh) | 2009-01-28 |
| US7898197B2 (en) | 2011-03-01 |
| EP2026460A2 (en) | 2009-02-18 |
| JP2009033876A (ja) | 2009-02-12 |
| EP2026460B1 (en) | 2020-03-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101355338B (zh) | 电动机控制装置 | |
| CN101286727B (zh) | 电动机控制装置 | |
| CN101154911B (zh) | 电动机控制装置以及电动机驱动系统 | |
| CN110224648B (zh) | 永磁同步电机参数辨识和无位置传感器控制方法及系统 | |
| CN102282753B (zh) | 适于电动机的控制器 | |
| CN101145754B (zh) | 电流检测单元及电动机控制装置 | |
| CN101247103B (zh) | 电机控制装置 | |
| CN104836502B (zh) | 一种交流伺服电机系统及其绕组三相电流的重构方法 | |
| Uddin et al. | Performance of current controllers for VSI-fed IPMSM drive | |
| CN102195552B (zh) | 近似多相电机中基波与三次谐波峰值合计电压的方法、系统和装置 | |
| CN101485079B (zh) | 同步机的无传感器控制装置 | |
| CN101145755A (zh) | 电动机控制装置 | |
| US10418920B2 (en) | Power system and motor driving apparatus included in power system | |
| CN104052344B (zh) | 旋转电机控制装置和电动助力转向设备 | |
| KR102267061B1 (ko) | 동력 장치, 동력 장치의 제어방법 및 동력 장치에 포함되는 전동기 구동 장치 | |
| CN107317532A (zh) | 基于滑模的永磁同步电机预测电流控制方法和系统 | |
| Habetler et al. | Direct torque control of induction machines over a wide speed range | |
| CN107508517A (zh) | 一种低速电动汽车交流异步电机矢量控制方法和系统 | |
| CN101286725A (zh) | 同步电机矢量控制系统中电机旋转速度和转子位置推测方法 | |
| CN104052360A (zh) | 马达控制装置 | |
| CN104506101B (zh) | 永磁无刷直流电机恒转矩步进控制的运行方法 | |
| WO2007114058A1 (ja) | 永久磁石同期モータの磁極位置検出方法 | |
| CN103997262B (zh) | 基于无传感器轮毂式电机的电动自行车正弦波控制方法 | |
| Jash et al. | Vector control of permanent magnet synchronous motor based on sinusoidal pulse width modulated inverter with proportional integral controller | |
| CN104106207A (zh) | 电力转换装置、电动机驱动系统、输送机和升降装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C17 | Cessation of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20110316 Termination date: 20130725 |