JP4963159B2 - 圧電/電歪デバイス - Google Patents
圧電/電歪デバイス Download PDFInfo
- Publication number
- JP4963159B2 JP4963159B2 JP2004335751A JP2004335751A JP4963159B2 JP 4963159 B2 JP4963159 B2 JP 4963159B2 JP 2004335751 A JP2004335751 A JP 2004335751A JP 2004335751 A JP2004335751 A JP 2004335751A JP 4963159 B2 JP4963159 B2 JP 4963159B2
- Authority
- JP
- Japan
- Prior art keywords
- piezoelectric
- thin diaphragm
- electrostrictive
- diaphragm portion
- plane
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Classifications
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/20—Piezoelectric or electrostrictive devices with electrical input and mechanical output, e.g. functioning as actuators or vibrators
- H10N30/204—Piezoelectric or electrostrictive devices with electrical input and mechanical output, e.g. functioning as actuators or vibrators using bending displacement, e.g. unimorph, bimorph or multimorph cantilever or membrane benders
- H10N30/2047—Membrane type
- H10N30/2048—Membrane type having non-planar shape
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/80—Constructional details
- H10N30/85—Piezoelectric or electrostrictive active materials
- H10N30/853—Ceramic compositions
Description
(A)前記薄肉ダイヤフラム部の形状が、外方に凸のアーチ形状であり、かつ前記アーチ形状の外方への突出量が、5〜50μmである
(B)前記薄肉ダイヤフラム部の架設幅が、600〜2000μmである
(C)前記厚肉部の高さの、その幅に対する割合(高さ/幅)が、0.25〜3である
(D)前記薄肉ダイヤフラム部の外形形状は、アスペクト比が1.5以上の、長方形、長円形、又は楕円形である
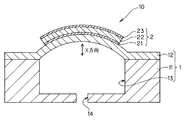
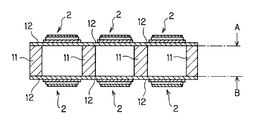
(A)薄肉ダイヤフラム部12の形状が、外方に凸のアーチ形状であり、かつアーチ形状の外方への突出量(h)が、5〜50μmであること、
(B)薄肉ダイヤフラム部の架設幅(m)が、600〜2000μmであること、
(C)前記厚肉部の高さの、その幅に対する割合(高さ/幅)が、0.25〜3であること。
1つの薄肉ダイヤフラム部(厚さ14μm、突出量20μm、架設幅1500μm)と、2つの厚肉部(厚肉部の高さ800μm、厚肉部の幅800μm、(厚肉部の高さ/厚肉部の幅)=1.0)と、1つの圧電/電歪素子(下部電極厚さ4μm、圧電/電歪膜厚さ20μm、上部電極厚さ0.5μm)とを備えた圧電/電歪デバイスを作製した。なお、実施例1で得られた圧電/電歪デバイスを構成する薄肉ダイヤフラム部におけるアーチ形状の突出量は、圧電/電歪デバイスの切断面を光学測定顕微鏡にて測定することによって確認した。
実施例1で得られた圧電/電歪デバイスを構成する薄肉ダイヤフラム部における振動特性を、圧電/電歪デバイスに50Vの電圧を印加した状態からその電圧を遮断した瞬間を時間の原点とし、その時に振動している薄肉ダイヤフラム部の位置の経時変化をレーザードップラー測定器によって20周期分の波形を測定した。その結果、第5振動波振幅(V5)は2.70μm、第10振動波振幅(V10)は2.45μm、振動波振幅の比の値=[(V10/V5)×100(%)]は、90.7%であり、その振動の減衰が小さいことがわかった。
実施例1において、薄肉ダイヤフラム部をアーチ形状にしなかったこと(突出量を0μmとしたこと)以外は実施例1と同様にし、振動特性を同様に測定した。その結果、第5振動波振幅は2.43μm、第10振動波振幅は1.93μm、振動波振幅の比の値=[(V10/V5)×100(%)]は79.4%であり、振動の減衰が大きいことがわかった。
実施例1において、薄肉ダイヤフラム部におけるアーチ形状の突出量を4μmとしたこと以外は実施例1と同様にし、振動特性を同様に測定した。その結果、第5振動波振幅は2.31μm、第10振動波振幅は1.95μm、振動波振幅の比の値=[(V10/V5)×100(%)]は84.4%であり、振動の減衰が大きいことがわかった。
実施例1において、薄肉ダイヤフラム部におけるアーチ形状の突出量を60μmとしたこと以外は実施例1と同様にし、振動特性を同様に測定した。その結果、第5振動波振幅は1.31μm、第10振動波振幅は0.79μm、振動波振幅の比の値=[(V10/V5)×100(%)]は60.3%であり、振動の減衰が大きいことがわかった。
実施例1において、薄肉ダイヤフラム部の架設幅を300μm、突出量を0μmとしたこと以外は実施例1と同様にし、振動特性を同様に測定した。その結果、第5振動波振幅は0.4μm、第10振動波振幅は0.29μm、振動波振幅の比の値=[(V10/V5)×100(%)]は72.5%であり、振動の減衰が大きいことがわかった。
実施例1において、薄肉ダイヤフラム部の架設幅を2500μmとしたこと以外は実施例1と同様にし、振動特性を同様に測定した。その結果、第5振動波振幅は3.71μm、第10振動波振幅は2.73μm、振動波振幅の比の値=[(V10/V5)×100(%)]は73.6%であり、振動の減衰が大きいことがわかった。
実施例1において、厚肉部の高さ200μm、厚肉部の幅1500μm、(厚肉部の高さ/厚肉部の幅)=0.13としたこと以外は実施例1と同様にし、振動特性を同様に測定した。その結果、第5振動波振幅は2.40μm、第10振動波振幅は1.94μm、振動波振幅の比の値=[(V10/V5)×100(%)]は80.1%であり、振動の減衰が大きいことがわかった。
実施例1において、厚肉部の高さ1200μm、厚肉部の幅200μm、(厚肉部の高さ/厚肉部の幅)=6.0としたこと以外は実施例1と同様にし、振動特性を同様に測定した。その結果、第5振動波振幅は2.36μm、第10振動波振幅は1.88μm、振動波振幅の比の値=[(V10/V5)×100(%)]は79.7%であり、振動の減衰が大きいことがわかった。
Claims (8)
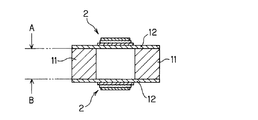
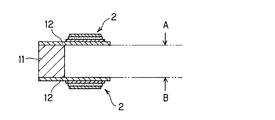
- 厚肉部と、前記厚肉部の端面上に一体的に架設された薄肉ダイヤフラム部、及び、前記厚肉部及び前記薄肉ダイヤフラム部によって外部に連通するように形成された空洞とからなるセラミック基体、及び
前記セラミック基体の薄肉ダイヤフラム部の外表面上に固定された層構造からなる下部電極、圧電/電歪膜及び上部電極を含む圧電/電歪素子
とから構成され、
前記セラミック基体の薄肉ダイヤフラム部が、前記圧電/電歪素子の駆動に連動して振動することが可能であり、
下記(A)〜(D)に規定された形状及び寸法関係を満たすことを特徴とする圧電/電歪デバイス。
(A)前記薄肉ダイヤフラム部の形状が、外方に凸のアーチ形状であり、かつ前記アーチ形状の外方への突出量が、5〜50μmである
(B)前記薄肉ダイヤフラム部の架設幅が、600〜2000μmである
(C)前記厚肉部の高さの、その幅に対する割合(高さ/幅)が、0.25〜3である
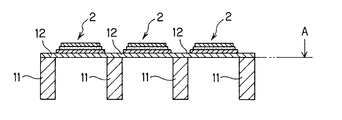
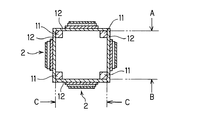
(D)前記薄肉ダイヤフラム部の外形形状は、アスペクト比が1.5以上の、長方形、長円形、又は楕円形である - 前記薄肉ダイヤフラム部及び薄肉ダイヤフラム部の外表面上に固定された圧電/電歪素子をそれぞれ2以上有し、前記薄肉ダイヤフラム部及び前記圧電/電歪素子が、第1の平面上及び前記第1の平面に平行な第2の平面上にそれぞれ配設されてなる請求項1に記載の圧電/電歪デバイス。
- 前記薄肉ダイヤフラム部及び薄肉ダイヤフラム部の外表面上に固定された圧電/電歪素子をそれぞれ2以上有し、前記薄肉ダイヤフラム部及び前記圧電/電歪素子が、第1の平面上、前記第1の平面に平行な第2の平面上及び前記第1の平面に垂直な第3の平面上にそれぞれ配設されてなる請求項1に記載の圧電/電歪デバイス。
- 前記圧電/電歪素子が、膜形成手法にて形成されたものであるとともに、前記圧電/電歪素子の構成材料が、前記薄肉ダイヤフラム部の外表面上に配設された後、熱処理されて、前記薄肉ダイヤフラム部の外表面上に固定されることによって得られてなる請求項1〜3の何れか一項に記載の圧電/電歪デバイス。
- 前記セラミック基体の前記薄肉ダイヤフラム部の厚さが100μm以下である請求項1〜4の何れか一項に記載の圧電/電歪デバイス。
- 前記上部電極の中心と前記薄肉ダイヤフラム部の中央とのずれが、前記薄肉ダイヤフラム部の長さ方向において、該薄肉ダイヤフラム部の長さに対し5%以下、該薄肉ダイヤフラム部の幅方向において、該薄肉ダイヤフラム部の幅に対し10%以下である請求項1〜5の何れか一項に記載の圧電/電歪デバイス。
- 前記圧電/電歪膜の材料が、(1−x)(Bi 0.5 Na 0.5 )TiO 3 −xKNbO 3 (xはモル分率で0≦x≦0.06)若しくはこれを主成分とする材料である請求項1〜6の何れか一項に記載の圧電/電歪デバイス。
- 流体特性、音圧、微小重量、又は加速度を検出するためのセンサとして用いられる請求項1〜7の何れか一項に記載の圧電/電歪デバイス。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004335751A JP4963159B2 (ja) | 2004-11-19 | 2004-11-19 | 圧電/電歪デバイス |
| CN2005101169179A CN1780010B (zh) | 2004-11-19 | 2005-10-25 | 压电/电致伸缩器件 |
| US11/281,645 US7221075B2 (en) | 2004-11-19 | 2005-11-17 | Piezoelectric/electrostrictive device |
| EP20050257121 EP1659644B1 (en) | 2004-11-19 | 2005-11-18 | Piezoelectric/electrostrictive device |
| DE200560022974 DE602005022974D1 (de) | 2004-11-19 | 2005-11-18 | Piezoelektrisches/Elektrostriktives Bauelement |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004335751A JP4963159B2 (ja) | 2004-11-19 | 2004-11-19 | 圧電/電歪デバイス |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006147840A JP2006147840A (ja) | 2006-06-08 |
| JP2006147840A5 JP2006147840A5 (ja) | 2007-10-25 |
| JP4963159B2 true JP4963159B2 (ja) | 2012-06-27 |
Family
ID=35529576
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004335751A Expired - Fee Related JP4963159B2 (ja) | 2004-11-19 | 2004-11-19 | 圧電/電歪デバイス |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7221075B2 (ja) |
| EP (1) | EP1659644B1 (ja) |
| JP (1) | JP4963159B2 (ja) |
| CN (1) | CN1780010B (ja) |
| DE (1) | DE602005022974D1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9056454B2 (en) | 2013-06-19 | 2015-06-16 | Ricoh Company, Ltd. | Actuator, method of manufacturing the actuator, and liquid droplet ejecting head, liquid droplet ejecting apparatus, and image forming apparatus having the actuator |
| US9533502B2 (en) | 2012-08-14 | 2017-01-03 | Ricoh Company, Ltd. | Electro-mechanical transducer element, liquid droplet ejecting head, image forming apparatus, and electro-mechanical transducer element manufacturing method |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2006096549A2 (en) * | 2005-03-04 | 2006-09-14 | Omniprobe, Inc. | Apparatus and method for automated stress testing of flip-chip packages |
| JP5088916B2 (ja) * | 2005-10-28 | 2012-12-05 | 富士フイルム株式会社 | 無機膜基板の製造方法 |
| JP4539992B2 (ja) * | 2006-06-07 | 2010-09-08 | 東芝テック株式会社 | インクジェット記録装置 |
| KR100819933B1 (ko) * | 2006-06-20 | 2008-04-10 | (주)제이엠씨 | 돔형의 압전박막 소자 및 그 제조방법 |
| JP4611251B2 (ja) * | 2006-07-04 | 2011-01-12 | 日本碍子株式会社 | 流体特性測定装置 |
| KR101069927B1 (ko) * | 2009-02-25 | 2011-10-05 | 삼성전기주식회사 | 잉크젯 헤드 |
| JP5669452B2 (ja) * | 2009-07-28 | 2015-02-12 | キヤノン株式会社 | 振動体の製造方法 |
| CN101998216A (zh) * | 2009-08-28 | 2011-03-30 | 友泰讯科(北京)科技有限公司 | 一种扬声器和便携式电子设备 |
| US8261618B2 (en) * | 2010-11-22 | 2012-09-11 | General Electric Company | Device for measuring properties of working fluids |
| CN102290527B (zh) * | 2011-09-22 | 2013-03-20 | 中国科学院上海硅酸盐研究所 | 一种弯曲形压电单晶片的制备方法 |
| JP5497222B2 (ja) * | 2012-09-28 | 2014-05-21 | バンドー化学株式会社 | 静電容量型センサシート及び静電容量型センサシートの製造方法 |
| JP6172437B2 (ja) * | 2013-03-13 | 2017-08-02 | セイコーエプソン株式会社 | 液体噴射ヘッド及び液体噴射装置 |
| US9835511B2 (en) * | 2015-05-08 | 2017-12-05 | Rosemount Aerospace Inc. | High temperature flexural mode piezoelectric dynamic pressure sensor |
| DE102016114566A1 (de) * | 2015-08-10 | 2017-02-16 | Bürkert Werke GmbH | Folienwandler und Aktorstreifen für einen Folienwandler |
| CN105032717B (zh) * | 2015-09-18 | 2017-10-17 | 京东方科技集团股份有限公司 | 一种封框胶涂布喷嘴及封框胶涂布装置 |
| CN205847241U (zh) * | 2016-05-19 | 2016-12-28 | 瑞声科技(新加坡)有限公司 | 电子设备 |
| CN107396275B (zh) * | 2017-07-21 | 2019-05-17 | 维沃移动通信有限公司 | 一种振幅检测装置、方法及移动终端 |
| CN107520110A (zh) * | 2017-07-31 | 2017-12-29 | 瑞声科技(新加坡)有限公司 | 压电超声换能器及其制备方法 |
| CN109572261A (zh) * | 2018-10-17 | 2019-04-05 | 东莞福哥电子有限公司 | 一种弧面型碳膜印刷层的制作方法 |
| US20220069737A1 (en) * | 2018-11-29 | 2022-03-03 | The Trustees Of Dartmouth College | Electrostatic-actuator-based, tunable, soft robots |
| CN110756418A (zh) * | 2019-10-29 | 2020-02-07 | 海鹰企业集团有限责任公司 | 调节高频曲面换能器频率的方法 |
| JP2023042043A (ja) * | 2021-09-14 | 2023-03-27 | 日清紡ホールディングス株式会社 | 圧電体デバイス |
| JP2023042042A (ja) * | 2021-09-14 | 2023-03-27 | 日清紡ホールディングス株式会社 | 圧電体デバイス |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6049158A (en) * | 1994-02-14 | 2000-04-11 | Ngk Insulators, Ltd. | Piezoelectric/electrostrictive film element having convex diaphragm portions and method of producing the same |
| JP3162584B2 (ja) * | 1994-02-14 | 2001-05-08 | 日本碍子株式会社 | 圧電/電歪膜型素子及びその製造方法 |
| US5545461A (en) * | 1994-02-14 | 1996-08-13 | Ngk Insulators, Ltd. | Ceramic diaphragm structure having convex diaphragm portion and method of producing the same |
| JP3313531B2 (ja) * | 1994-06-03 | 2002-08-12 | 日本碍子株式会社 | 圧電/電歪膜型素子及びその製造方法 |
| CN1050229C (zh) * | 1994-08-11 | 2000-03-08 | 日本碍子株式会社 | 压电/电致伸缩膜元件及其制作方法 |
| CN1050008C (zh) * | 1994-08-11 | 2000-03-01 | 日本碍子株式会社 | 压电/电致伸缩膜元件及其制作方法 |
| JP3366158B2 (ja) * | 1994-09-06 | 2003-01-14 | 日本碍子株式会社 | セラミックダイヤフラム構造体及びその製造方法 |
| JP3471447B2 (ja) * | 1994-11-16 | 2003-12-02 | 日本碍子株式会社 | セラミックダイヤフラム構造体およびその製造方法 |
| JP3388060B2 (ja) | 1994-11-25 | 2003-03-17 | 日本碍子株式会社 | 流体の特性測定用素子及び流体の特性測定装置 |
| JP3501860B2 (ja) * | 1994-12-21 | 2004-03-02 | 日本碍子株式会社 | 圧電/電歪膜型素子及びその製造方法 |
| JPH09164674A (ja) * | 1995-12-15 | 1997-06-24 | Minolta Co Ltd | インクジェット記録装置 |
| EP0810676B1 (en) * | 1996-05-27 | 2002-08-28 | Ngk Insulators, Ltd. | Piezoelectric film-type element |
| JP3589560B2 (ja) * | 1998-01-27 | 2004-11-17 | 株式会社リコー | インクジェットヘッド及びその製造方法 |
| JP3462400B2 (ja) * | 1998-09-14 | 2003-11-05 | 日本碍子株式会社 | セラミックダイヤフラム構造体の製造方法 |
| US6407481B1 (en) * | 1999-03-05 | 2002-06-18 | Ngk Insulators, Ltd. | Piezoelectric/electrostrictive device having convexly curved diaphragm |
| JP2000334946A (ja) * | 1999-05-28 | 2000-12-05 | Ricoh Co Ltd | インクジェットヘッド及びインクジェット記録装置 |
| US6404109B1 (en) * | 1999-10-01 | 2002-06-11 | Ngk Insulators, Ltd. | Piezoelectric/electrostrictive device having increased strength |
| JP3728623B2 (ja) | 2001-03-02 | 2005-12-21 | 日本碍子株式会社 | 圧電/電歪膜型素子 |
-
2004
- 2004-11-19 JP JP2004335751A patent/JP4963159B2/ja not_active Expired - Fee Related
-
2005
- 2005-10-25 CN CN2005101169179A patent/CN1780010B/zh not_active Expired - Fee Related
- 2005-11-17 US US11/281,645 patent/US7221075B2/en not_active Expired - Fee Related
- 2005-11-18 DE DE200560022974 patent/DE602005022974D1/de active Active
- 2005-11-18 EP EP20050257121 patent/EP1659644B1/en not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9533502B2 (en) | 2012-08-14 | 2017-01-03 | Ricoh Company, Ltd. | Electro-mechanical transducer element, liquid droplet ejecting head, image forming apparatus, and electro-mechanical transducer element manufacturing method |
| US9056454B2 (en) | 2013-06-19 | 2015-06-16 | Ricoh Company, Ltd. | Actuator, method of manufacturing the actuator, and liquid droplet ejecting head, liquid droplet ejecting apparatus, and image forming apparatus having the actuator |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1659644A2 (en) | 2006-05-24 |
| EP1659644B1 (en) | 2010-08-18 |
| US20060108896A1 (en) | 2006-05-25 |
| US7221075B2 (en) | 2007-05-22 |
| JP2006147840A (ja) | 2006-06-08 |
| EP1659644A3 (en) | 2007-01-24 |
| DE602005022974D1 (de) | 2010-09-30 |
| CN1780010A (zh) | 2006-05-31 |
| CN1780010B (zh) | 2010-09-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4963159B2 (ja) | 圧電/電歪デバイス | |
| US7183694B2 (en) | Piezoelectric/electrostrictive device | |
| US8759990B2 (en) | Energy harvesting device including MEMS composite transducer | |
| US7126255B2 (en) | Piezoelectric/electrostrictive film-type device | |
| US8633634B2 (en) | MEMs-based cantilever energy harvester | |
| JP5019120B2 (ja) | 検出センサ | |
| US8680695B2 (en) | Energy harvesting using MEMS composite transducer | |
| JP3465675B2 (ja) | 圧電/電歪膜型素子 | |
| JP3482939B2 (ja) | 圧電/電歪膜型素子 | |
| JP5004797B2 (ja) | 圧電/電歪膜型素子 | |
| JP5031737B2 (ja) | 圧電/電歪膜型素子 | |
| JP4114321B2 (ja) | インクジェットプリンタヘッド及びインクジェットプリンタヘッド用の圧電/電歪アクチュエータ | |
| JP3728623B2 (ja) | 圧電/電歪膜型素子 | |
| JP5009507B2 (ja) | 圧電/電歪膜型素子 | |
| WO2012145279A2 (en) | Energy harvesting device including mems composite transducer | |
| WO2022220142A1 (ja) | 超音波トランスデューサー、距離測定装置および超音波トランスデューサーの製造方法 | |
| JP4936909B2 (ja) | 流体特性測定装置の使用方法 | |
| JP4805787B2 (ja) | 圧電/電歪膜型センサ | |
| JP2004221550A (ja) | 圧電体積層構造体 | |
| Gaucher | Piezoelectric micro-electro-mechanical systems for acoustic applications |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070911 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070911 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110523 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110531 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110728 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120321 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120322 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150406 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |