WO2017068696A1 - 駐車支援情報の表示方法及び駐車支援装置 - Google Patents
駐車支援情報の表示方法及び駐車支援装置 Download PDFInfo
- Publication number
- WO2017068696A1 WO2017068696A1 PCT/JP2015/079890 JP2015079890W WO2017068696A1 WO 2017068696 A1 WO2017068696 A1 WO 2017068696A1 JP 2015079890 W JP2015079890 W JP 2015079890W WO 2017068696 A1 WO2017068696 A1 WO 2017068696A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- parking
- parking space
- display
- mark
- displayed
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 79
- 238000010586 diagram Methods 0.000 description 51
- 230000008569 process Effects 0.000 description 28
- 238000001514 detection method Methods 0.000 description 21
- 238000012545 processing Methods 0.000 description 17
- 230000007423 decrease Effects 0.000 description 13
- 240000004050 Pentaglottis sempervirens Species 0.000 description 11
- 235000004522 Pentaglottis sempervirens Nutrition 0.000 description 11
- 230000004397 blinking Effects 0.000 description 9
- 230000006870 function Effects 0.000 description 7
- 238000012544 monitoring process Methods 0.000 description 7
- 230000007306 turnover Effects 0.000 description 7
- 230000003247 decreasing effect Effects 0.000 description 5
- 230000000694 effects Effects 0.000 description 5
- 238000013459 approach Methods 0.000 description 3
- 238000004891 communication Methods 0.000 description 3
- 239000003086 colorant Substances 0.000 description 2
- 238000011156 evaluation Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 239000010432 diamond Substances 0.000 description 1
- 238000003708 edge detection Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 238000012905 input function Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
Images



















Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/14—Traffic control systems for road vehicles indicating individual free spaces in parking areas
- G08G1/145—Traffic control systems for road vehicles indicating individual free spaces in parking areas where the indication depends on the parking areas
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/027—Parking aids, e.g. instruction means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/06—Automatic manoeuvring for parking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/027—Parking aids, e.g. instruction means
- B62D15/028—Guided parking by providing commands to the driver, e.g. acoustically or optically
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/027—Parking aids, e.g. instruction means
- B62D15/0285—Parking performed automatically
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
- G06V20/586—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads of parking space
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/017—Detecting movement of traffic to be counted or controlled identifying vehicles
- G08G1/0175—Detecting movement of traffic to be counted or controlled identifying vehicles by photographing vehicles, e.g. when violating traffic rules
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/14—Traffic control systems for road vehicles indicating individual free spaces in parking areas
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/14—Traffic control systems for road vehicles indicating individual free spaces in parking areas
- G08G1/141—Traffic control systems for road vehicles indicating individual free spaces in parking areas with means giving the indication of available parking spaces
- G08G1/143—Traffic control systems for road vehicles indicating individual free spaces in parking areas with means giving the indication of available parking spaces inside the vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/14—Traffic control systems for road vehicles indicating individual free spaces in parking areas
- G08G1/141—Traffic control systems for road vehicles indicating individual free spaces in parking areas with means giving the indication of available parking spaces
- G08G1/144—Traffic control systems for road vehicles indicating individual free spaces in parking areas with means giving the indication of available parking spaces on portable or mobile units, e.g. personal digital assistant [PDA]
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/168—Driving aids for parking, e.g. acoustic or visual feedback on parking space
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
- G09B29/10—Map spot or coordinate position indicators; Map reading aids
Definitions
- the present invention relates to a parking assistance information display method and a parking assistance device.
- Patent Document 1 a technique is known in which an image of an extended line of a parking frame is superimposed and displayed when a part of the detected parking space is outside the display area.
- the problem to be solved by the present invention is to enable the driver to use even when the parking space is not displayed in the display area of the display.
- the present invention displays the mark indicating that there is a parking space that is not displayed in the display area when the area of the parking space area displayed in the display area of the display is less than a predetermined value. To solve.
- the present invention by displaying the mark, it is possible to tell the driver that there is a parking space that can be used outside the display area, so even if the parking space is not displayed in the display area of the display, The driver can use a parking space that is not displayed in the display area.
- FIG. 1 is a block diagram showing an example of a parking support system according to the present embodiment according to the present invention.
- FIG. 2 is a flowchart illustrating an example of a control procedure of the parking assistance system according to the present embodiment.
- FIG. 3 is a diagram illustrating an example of an installation position of the in-vehicle camera of the present embodiment. It is FIG. 1 for demonstrating an example of the parking assistance process of this embodiment. It is FIG. 2 for demonstrating an example of the parking assistance process of this embodiment. It is FIG. 3 for demonstrating an example of the parking assistance process of this embodiment. It is FIG. 4 for demonstrating an example of the parking assistance process of this embodiment.
- FIG. 1 is a block diagram showing an example of a parking support system according to the present embodiment according to the present invention.
- FIG. 2 is a flowchart illustrating an example of a control procedure of the parking assistance system according to the present embodiment.
- FIG. 3 is a diagram illustrating an example of an installation position of the in-vehicle camera of
- FIG. 5 is a graph showing the relationship between the vehicle speed (V [km / s]) and the gaze point distance (Y [m]).
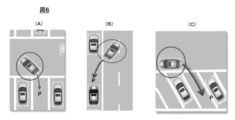
- FIGS. 6A, 6 ⁇ / b> B, and 6 ⁇ / b> C are diagrams illustrating examples of parking patterns to which the parking support process of the present embodiment is applied.
- FIG. 7A is a first diagram illustrating an example of parking assistance information presented in the parking assistance processing of the present embodiment.
- FIG. 7B is a second diagram illustrating an example of parking support information presented in the parking support process of the present embodiment.
- FIG. 7C is a third diagram illustrating an example of parking assistance information presented in the parking assistance processing of the present embodiment.
- FIG. 8A is a first diagram illustrating a display example of parking assistance information.
- FIG. 8B is a second diagram illustrating a display example of parking assistance information.
- FIG. 8C is a third diagram illustrating a display example of parking support information.
- FIG. 8D is a fourth diagram illustrating a display example of parking assistance information.
- FIG. 8E is a fifth diagram illustrating a display example of parking assistance information.
- FIG. 9 is a diagram illustrating a display example of parking support information according to the distance.
- FIGS. 10A, 10 ⁇ / b> B, and 10 ⁇ / b> C are diagrams illustrating display examples of parking support information according to distance.
- FIGS. 11A, 11 ⁇ / b> B, and 11 ⁇ / b> C are diagrams illustrating display examples of parking support information according to speed.
- the parking assistance device may be applied to a portable terminal device (a device such as a smartphone or a PDA) that can exchange information with the in-vehicle device.
- the parking support information display method according to the present invention can be used in a parking support apparatus.
- the parking assistance information according to the present invention is displayed using the display 21.
- the parking assistance apparatus 100 of the present embodiment may be a semi-automatic type in which a steering operation is automatically performed and an accelerator / brake operation is performed by a driver.
- the parking assist device 100 may be an automatic control type in which a steering operation and an accelerator / brake operation are automatically performed. Moreover, the parking assistance apparatus 100 of this embodiment may be a remote control type in which a vehicle is parked in a predetermined parking space by controlling the movement of the vehicle from the outside without boarding the vehicle.
- FIG. 1 is a block diagram of a parking support system 1000 having a parking support apparatus 100 according to an embodiment of the present invention.
- the parking support system 1000 according to the present embodiment supports an operation of moving (parking) the host vehicle to a parking space.
- the parking assistance system 1000 of this embodiment includes a camera 1a to 1d, an image processing device 2, a distance measuring device 3, a parking assistance device 100, a vehicle controller 30, a drive system 40, a steering angle sensor 50, A vehicle speed sensor 60.
- the parking assistance device 100 of this embodiment includes a control device 10 and an output device 20.
- the output device 20 includes a display 21 and a speaker 22. Each of these components is connected by a CAN (Controller Area Network) or other in-vehicle LAN in order to exchange information with each other.
- the output device 20 transmits parking support information to the driver.
- the display 21 notifies the driver of parking assistance information according to the content of the text, the content of the display image, and the form of the display image.
- the display 21 of the present embodiment is a touch panel type display having an input function and an output function.
- the speaker 22 notifies the driver of parking assistance information expressed in text and sound by voice.
- the control device 10 of the parking assistance apparatus 100 includes a ROM 12 that stores a parking assistance program, and an operation circuit that functions as the parking assistance apparatus 100 according to the present embodiment by executing the program stored in the ROM 12. And a RAM 13 that functions as an accessible storage device.
- the parking assistance program includes a program for displaying parking assistance information.
- the parking assistance program of the present embodiment presents parking assistance information including information on parking spaces that can be parked on the display 21 and executes a control procedure that assists the operation of parking the host vehicle V in the parking space set by the driver. It is a program to let you.
- a parking space to be parked may be automatically set.
- the parking assist device 100 according to the present embodiment manually operates some of the automatic parking system, steering, accelerator, and brake that automatically operates the steering, accelerator, and brake, and performs other operations automatically. It can also be applied to a semi-automatic parking system.
- the present invention can be applied to a system that supports parking by presenting a route to the parking space and guiding the host vehicle to the parking space.
- the control device 10 of the parking assist device 100 has a function of executing an information acquisition process, a parking space detection process, a recommended parking space detection process, a display control process, and a parking control process.
- Each process described above is executed by cooperation of software for realizing each process and the hardware described above.
- FIG. 2 is a flowchart showing a control procedure of parking support processing executed by the parking support system 1000 according to the present embodiment.
- the trigger for starting the parking support process is not particularly limited, and the start of the parking support apparatus 100 may be triggered.
- the parking assistance apparatus 100 of this embodiment is provided with the function to move the own vehicle V to a parking space automatically.
- an input device including a switch that is turned on only while being pressed such as a deadman switch
- the parking assist device 100 is configured such that automatic driving of the host vehicle V is executed when the deadman switch is pressed, and automatic driving of the host vehicle V is stopped when the pressing of the deadman switch is released.
- the input device of the present embodiment can also be arranged as a vehicle-mounted device in the vehicle interior, and can also be configured as a portable device that can be taken out of the vehicle compartment so that the host vehicle V can be controlled from the outside of the vehicle.
- the input device includes a communication device and can exchange information with the parking support device 100.
- the input device communicates with the parking assistance device 100 using a signal including a unique identification number.
- the control device 10 of the parking assistance device 100 acquires captured images captured by the cameras 1a to 1d attached to a plurality of locations of the host vehicle V.
- the cameras 1a to 1d take images of the boundaries of the parking space around the host vehicle V and the objects existing around the parking space.
- the cameras 1a to 1d are CCD cameras, infrared cameras, and other imaging devices.
- the distance measuring device 3 may be provided at the same position as the cameras 1a to 1d or at different positions.
- a radar device such as a millimeter wave radar, a laser radar, an ultrasonic radar, or a sonar can be used.
- the distance measuring device 3 detects the presence / absence of the object, the position of the object, and the distance to the object based on the received signal of the radar device.
- Objects include obstacles around the vehicle, pedestrians, other vehicles, and the like. This received signal is used to determine whether the parking space is vacant (whether it is parked). Obstacles may be detected using a motion stereo technique using the cameras 1a to 1d.
- FIG. 3 is a diagram showing an arrangement example of the cameras 1a to 1d mounted on the host vehicle V.
- the camera 1 a is disposed on the front grill portion of the host vehicle V
- the camera 1 d is disposed near the rear bumper
- the cameras 1 b and 1 c are disposed below the left and right door mirrors.
- the cameras 1a to 1d cameras having wide-angle lenses with a large viewing angle can be used.
- step 101 the control device 10 acquires distance measurement signals by the distance measurement devices 3 attached to a plurality of locations of the host vehicle V.
- the control device 10 of the parking assistance device 100 causes the image processing device 2 to generate an overhead image.
- the image processing apparatus 2 displays the surrounding state including the host vehicle V and a parking space in which the host vehicle V is parked as a virtual viewpoint P above the host vehicle V (see FIG. 3).
- a bird's-eye view image viewed from the above is generated.
- the image processing performed by the image processing apparatus 2 is, for example, “Masayasu Suzuki, Keigo Chino, Teruhisa Takano, Development of a bird's-eye view system, Preprints of Academic Lecture Meeting of the Automotive Engineers of Japan, 116-07 (2007-10), 17 22. "etc. can be used.
- An example of the generated overhead image 21a is shown in FIG. This figure is a display example that simultaneously shows a bird's-eye view image (top view) 21a around the host vehicle V and a monitoring image (normal view) 21b around the host vehicle V.
- the control device 10 detects a parking space based on a predefined “parking condition”.
- the process of specifying a parking space and a recommended parking space is a process of detecting a parking space and a recommended parking space.
- the parking assist device 100 detects a parking space that satisfies the “parking condition”, thereby specifying “parking available space” and “recommended parking space”.
- the method of specifying “parking available space” and “recommended parking space” is not limited to those involving detection processing, and is subject to processing using identification information of “parking available space” and “recommended parking space” detected by an external device. “Parking available space” and “recommended parking space” may be specified.
- parking conditions will be described.
- the parking conditions of this embodiment include the following items. 1. 1. Parking frame line detection condition 2. Parking space detection conditions Parking conditions 4. Recommended parking conditions
- Parking frame line detection condition is a condition for detecting a diagram that forms a parking space from a captured image of a road surface.
- the “parking space detection condition” is a condition for detecting a parking space from a road surface diagram.
- the “parking available condition” is a condition for detecting a parking available space where parking is possible.
- the “recommended parking condition” is a condition for narrowing down a recommended parking space that encourages the host vehicle V to park among the parking spaces. These conditions may be employed alone as “parking conditions”, or may be employed in combination as a “parking condition”.
- step 103 the control device 10 detects a parking frame line, detects a parking space based on the captured images of the cameras 1a to 1d and / or data received by the distance measuring device 3, and uses these pieces of information.
- a parking space Me is detected.
- the parking space is detected from the captured images of the cameras 1a to 1d.
- the method for detecting the parking space is not particularly limited, and information is obtained from an external server to detect the parking space (or Specific).
- the control device 10 determines whether or not the vehicle travels in an area including a parking space (hereinafter also referred to as a parking area). For example, when the vehicle speed of the host vehicle V is equal to or lower than a predetermined vehicle speed threshold and the state continues for a certain time or longer, the control device 10 determines that the host vehicle V is traveling in the parking area. To do. The control device 10 determines whether or not the vehicle is traveling in the parking area based on the position information attribute of the navigation system (not shown) (information indicating that the point is a parking lot).
- the detected position information belongs to a parking area such as a parking space on an expressway
- the control apparatus 10 detects a white line based on the captured image acquired for the production
- the white line is a boundary line that defines the frame (area) of the parking space.
- the control device 10 calculates a luminance difference (contrast) by performing edge detection on the captured image.
- the control device 10 specifies a pixel row having a luminance difference equal to or greater than a predetermined value from the overhead image, and calculates the line thickness and the line length.
- the frame line indicating the parking space does not necessarily have to be white, and may be another color such as red.
- the control device 10 detects a line that satisfies the following condition “1. Parking frame line detection condition” as a parking frame line.
- Parking frame line detection condition as a parking frame line.
- a diagram satisfying all of (1) to (6) is detected as a parking frame line. Any one or more of the conditions (1) to (6) may be selected and applied.
- Parking frame line detection condition (1) The edge luminance difference is equal to or greater than a predetermined threshold. (2) The angle of the line is within a predetermined threshold. (3) The line width is within a predetermined threshold. (4) The length of a continuous edge (line) is not less than a predetermined value. (5) The luminance difference of noise between lines is less than a predetermined threshold. (6) The likelihood (likelihood) indicating the likelihood as a parking frame line calculated based on the evaluation values of (1) to (5) above is a predetermined value or more.
- the control device 10 detects a parking space from the detected parking frame line candidates using a known image processing technique such as pattern matching. Specifically, the control device 10 detects a parking frame line that satisfies the following condition “2. Parking space detection condition” as a parking space. In this example, a parking frame line that satisfies all (1) to (3) of “2. Parking space detection condition” below is detected as a parking space.
- the control apparatus 10 detected a parking space using the well-known image processing techniques, such as pattern matching, from the detected parking frame line candidate, in this embodiment, it is not restricted to this, but a parking frame line is used. You may make it detect a parking space directly, without detecting.
- an empty space in a predetermined range may be detected as a parking space, or a place where a parking operation has been executed in the past may be detected as a parking space.
- a parking space can be directly detected without detecting a parking frame line as long as it satisfies a preset condition that defines the probability of being a parking space.
- Parking space detection condition (1) Among lines extracted as parking frame line candidates, a line having a length equal to or greater than a preset first threshold (for example, a length corresponding to an actual distance of 15 [m]) Is not included. (2) Among the lines extracted as parking frame line candidates, a pair of substantially parallel pairs that are equal to or smaller than a preset second threshold (for example, a length corresponding to an actual distance of 3 to 5 [m]). The line does not include a line having a length greater than or equal to a preset third threshold (for example, a length corresponding to an actual distance of 7 [m]).
- a preset first threshold for example, a length corresponding to an actual distance of 15 [m]
- the location information of the parking space may be included in the map information of the navigation system and stored.
- the location information of the parking space may be acquired from an external server or a facility (parking lot) management device.
- FIG. 4A is a first diagram illustrating an example of a parking support process according to the present embodiment.
- the position of the traveling vehicle V is P1
- the vehicle speed is V1.
- the control device 10 detects a parking space in which the host vehicle V moving in the arrow direction (in front of the host vehicle V) can be parked. It may be the center of gravity position V0 of the host vehicle V, may be the position of the front bumper of the host vehicle V, or may be the position of the rear bumper of the host vehicle V.
- control device 10 uses the detection data of the distance measuring device 3 / image processing device 2 to detect a free parking space according to the following parking conditions.
- the control device 10 stores “parking conditions” for extracting the parking space Me. “Parking conditions” is included in “parking conditions”. “Parking conditions” are defined from the viewpoint of extracting parking spaces where parking is possible. The “parking conditions” are preferably defined in terms of the distance from the host vehicle V, whether or not other vehicles are parked, and the presence or absence of an obstacle.
- the control device 10 detects a parking available space Me where the host vehicle V can be parked based on the “parking available condition”.
- the parking space Me is a parking space where the host vehicle V can be parked.
- the “parking possible condition” of the present embodiment is defined from the viewpoint of extracting a parking space where the host vehicle V can be parked. (1) A predetermined distance range from the host vehicle V. (2) The parking space is empty. (3) There are no obstacles.
- Control device 10 determines whether there is an obstacle in the parking space. In the parking area shown in FIG. 4A, the control device 10 does not detect the parking spaces PR1, PR4, PR6, and PL3 as the parking spaces Me because other vehicles are parked. Since the obstacle M1 exists in the parking space PR8, the control device 10 does not detect the parking space PR8 as the parking space Me.
- the control device 10 detects a parking space where the host vehicle V can move to the parking space.
- the control device 10 determines that the host vehicle V can be parked in the parking space.
- FIG. 4A the path
- the route L is a route that travels from the current position of the host vehicle V to the forward intermediate position Mw, switches back to the parking space PL at the intermediate position Mw.
- a parking space where a route cannot be obtained on the road surface due to the presence of an obstacle such as a wall is not detected as a parking space that can be parked. Since the wall W becomes an obstacle, a route (broken line arrow L) leading to the parking space PL8 cannot be obtained.
- Control device 10 does not detect parking space PL8 as parking space Me.
- the control device 10 detects a parking space that is ahead of the reference position of the host vehicle V and belongs to a predetermined distance range from the host vehicle V as a parking space at the position P1 of the host vehicle V.
- the reference position of the host vehicle V can be arbitrarily set.
- PL2 to PL5 and PR2 to PR5 belong to the detection range of the parking space Me.
- the control device 10 can prevent the parking space PL1 that moves behind the host vehicle V within a predetermined time from being detected as the parking space Me.
- the detection range can be expanded according to the performance of the cameras 1a to 1d and the distance measuring device 3.
- the parking assistance device 100 of the present embodiment presents parking information regarding the detection range to the occupant.
- the detection range is not limited to the range of PL2 to PL5 and PR2 to PR5, and may be the range of PL1 to PL8, PR1 to PR8, for example.
- the detection range may be limited to a range including PR1 to PR8 on the right side of the host vehicle V, or may be limited to a range including PL1 to PL8 on the left side of the host vehicle V.
- control device 10 of the present embodiment is a parking space that is an empty vehicle (no other vehicle is parked), a route L can be derived, and belongs to a predetermined detection range. And detected as a parking space Me.
- the fact that the route L can be derived means that the locus of the route L can be drawn on the road surface coordinates without interfering with an obstacle (including a parked vehicle).
- the control device 10 detects the parking spaces PL2, PL4, PL5, PR2, PR3, and PR5 as parking spaces Me within the detection range.
- the detected parking space Me is marked with a dotted circle mark Me which is a parking mark.
- step 104 the control apparatus 10 detects the recommended parking space Mr according to the following parking recommended conditions.
- the “recommended parking condition” of the present embodiment is defined from the viewpoint of extracting a parking space with a low cost for parking (also referred to as “required parking cost”, the same applies hereinafter).
- the number of turnovers required for parking is not more than a predetermined number.
- the time required for parking is a predetermined time or less.
- the moving distance required for parking is not more than a predetermined distance.
- the control device 10 detects a recommended parking space Mr according to the traveling state of the host vehicle V from the plurality of detected parking spaces.
- the control device 10 stores “recommended parking conditions” for extracting the recommended parking space Mr.
- the “recommended parking condition” is defined from the viewpoint of extracting a parking space with a low parking cost.
- the “recommended parking condition” is preferably defined in terms of the number of turnovers required for parking, the time required for parking, and the travel distance required for parking. Based on the “recommended parking condition”, the control device 10 extracts a recommended parking space Mr having a low parking cost from the parking spaces.
- the control apparatus 10 evaluates the parking required cost required for parking in each parking space.
- the parking required cost includes the time required for parking, the number of operations required for parking (the number of steering operations, the number of brake / accelerator operations), and the travel distance required for parking.
- the control apparatus 10 calculates
- the control apparatus 10 evaluates each parking required cost based on the evaluation result of each route.
- the control device 10 calculates a route when the host vehicle V is parked in each parking space Me.
- the route is a trajectory from the start position of the parking assistance process to the parking completion position of each parking space Me.
- the control device 10 sets a start position for each parking space Me.
- the control device 10 calculates a route from the start position to each parking space Me.
- the number of routes for automatic driving is not limited to one, and the control device 10 calculates a plurality of routes according to the surrounding conditions.
- Costs such as the number of turnovers of the route calculated for each parking space Me, the length of the route, the time to travel along the route (parking time), and the maximum turning angle are different.
- the greater the number of turnovers the longer the time required for parking (the parking cost is greater).
- the longer the maximum turning angle the longer the time required for parking (the parking required cost is greater).
- the case where the host vehicle V is parked in the parking spaces PL6 and PL7 that can be parked shown in FIG. 4A will be described as an example.
- the distance from parking space PL7 to wall W is shorter than the distance from parking space PL6 to wall W.
- the number of turnovers when parking in the parking space PL7 is greater than the number of turnovers when parking in the parking space PL6 (the parking required cost is increased).
- the time required for parking for parking in the parking space PL7 is longer than the time required for parking for parking in the parking space PL6 (the required parking cost increases).
- the control device 10 calculates the parking required cost (including parking time) of each parking space and stores it in association with the identifier of each parking space.
- the control device 10 moves the parking required cost for parking in each parking space Me along the route, the parking required cost according to the number of times the route is turned back, the parking required cost according to the route length, and the route. It calculates using any one or more parking required cost among the parking required cost according to the time (parking time) to perform and the parking required cost according to the maximum turning angle.
- Each parking cost may be calculated by defining a weight according to the type.
- the control device 10 calculates the gaze point distance based on the vehicle speed of the host vehicle V.
- the gaze point distance corresponds to the distance from the position of the host vehicle V to the position (gaze point) where the driver of the host vehicle V gazes.
- the control apparatus 10 detects the parking space according to the position where the driver is gazing as the recommended parking space.
- the control device 10 sets a longer gaze distance as the vehicle speed of the host vehicle V is higher, and sets a shorter gaze distance as the vehicle speed of the host vehicle V is lower. Set. Thereby, parking assistance to the parking space according to the driver's intention can be executed.
- the gazing point distance is the length to the gazing point along the traveling direction of the host vehicle V.
- the gazing point distance is not necessarily a straight line, and may be a curved line.
- the direction of the gazing point distance can be set according to the steering angle of the host vehicle V.
- FIG. 5 is a graph showing the relationship between the vehicle speed (V [km / s]) and the gaze point distance (Y [m]).
- a solid line indicates the relationship when the vehicle speed increases, and a broken line indicates the relationship when the vehicle speed decreases.
- the gazing point distance is Ya.
- the gazing point distance from the vehicle speed Va to Vc is Ya.
- the gazing point distance Y increases in proportion to the vehicle speed V.
- the gazing point distance is Yb.
- the gazing point distance is shortened along the broken line in FIG.
- the gaze point distance is Yb until the vehicle speed decreases from Vd to Vb.
- the gazing point distance decreases in proportion to the decrease in the vehicle speed until the vehicle speed decreases from Vb to Va. That is, the relationship between the vehicle speed Va and the gaze point distance Y has a hysteresis characteristic between the increasing direction and decreasing direction of the vehicle speed Va.
- the ROM 12 of the control device 10 stores a map (for example, the relationship shown in FIG. 5) between the vehicle speed V and the gaze point distance Y.
- the control device 10 acquires information on the vehicle speed V from the vehicle speed sensor 60, and calculates a gaze point distance Y corresponding to the vehicle speed V with reference to the map.
- the control device 10 detects a parking space near the gazing point (within a predetermined distance from the gazing point) separated from the host vehicle V by the gazing point distance Y.
- the parking assist device 100 of the present embodiment defines that the gaze point distance when the vehicle speed decreases has a hysteresis characteristic.
- the gazing point distance Yd is maintained even when the vehicle speed decreases. Accordingly, it is possible to prevent an unnatural display in which the position of the recommended parking space Mr goes backward in the traveling direction of the host vehicle V and approaches the host vehicle V.
- the gazing point distance may be included in the recommended parking condition described above. Thereby, the parking space according to a driver's viewpoint can be recommended.
- FIG. 4B shows a state where the host vehicle V has advanced from the position P1 shown in FIG. 4A to the position P2.
- the speed of the host vehicle V at the position P2 is V2 ( ⁇ V1).
- the control device 10 calculates the gaze point distance Y corresponding to the vehicle speed V2 with reference to the map.
- the control device 10 specifies G2 that is separated from the position P2 by the gaze point distance as the gaze point (G2).
- the host vehicle V is in a state where the parking space is selected by lowering the vehicle speed V2 ( ⁇ V1). Since the vehicle speed is decreasing, the distance between the gazing point G2 and the host vehicle V is shorter than the distance between the gazing point G1 and the host vehicle V shown in FIG.
- the control device 10 detects a recommended parking space from the parking spaces PL2, PL4, PL5, PR2, PR3 in the vicinity of the gazing point G2.
- the control device 10 detects the recommended parking space based on the parking required cost of each parking space PL2, PL4, PL5, PR2, PR3.
- the control device 10 assigns an identification number to the parking space Me near the gazing point G2.
- the control apparatus 10 calculates the parking required cost for parking in the parking space Me.
- the control apparatus 10 may read the parking required cost calculated previously.
- the parking required cost for parking in each parking space Me is a load such as the required parking time, the number of operations, and the moving distance required for moving the vehicle V to the parking space by automatic driving.
- the parking required cost is an index different from the difficulty level when the driver performs the parking operation.
- the control apparatus 10 calculates the parking required time of the parking space Me for every parking space Me. In the example of FIG. 4B, the control device 10 calculates the parking required times of the parking spaces PL2, PL4, PL5, PR2, PR3, and PR5 where parking is possible, and stores them in association with each identification number.
- the control device 10 compares the parking required cost for parking in each parking space Me with a predetermined threshold value set in advance.
- the predetermined threshold is an upper limit threshold of the required parking cost including the required parking time when parking by automatic driving.
- the control device 10 detects the parking space Me as the recommended parking space Mr.
- the control device 10 does not detect this parking space Me as the recommended parking space Mr.
- the parking available space Me having the shortest required parking time (lowest cost) may be detected as the only recommended parking space Mr.
- the control device 10 detects, as the recommended parking space Mr, the parking available space Me having the lowest parking cost among the available parking spaces Me.
- a parking space PL4 whose parking required cost (parking required time) is lower than a predetermined threshold and whose gaze point is closest (low cost) is detected as the recommended parking space Mr.
- the control device 10 executes a recommended parking space Mr detection process at a predetermined cycle. As shown in FIG. 4C, a new recommended parking space Mr is also detected when the host vehicle V moves forward to the position P3 at the vehicle speed V3. The control device 10 calculates a new gazing point G3, calculates the parking required cost required to move from the current position to each parking space Me, and sets the parking space PL5 having the lowest parking cost as the recommended parking space Mr. To detect.
- step 105 the control device 10 displays the parking space Me and the recommended parking space Mr on the display 21.
- the display method of the parking space Me and the recommended parking space Mr in the present embodiment will be described in detail later.
- step 106 it is determined whether or not the target parking space Mo has been input.
- the target parking space Mo is a parking space where the vehicle is parked by automatic driving, and is a target position in automatic driving.
- the target parking space Mo is input by the passenger.
- the display 21 is a touch panel display
- step 106 when the target parking space Mo is input, the control flow proceeds to step 107.
- the control flow returns to step 104, and the control flow from step 104 to step 106 is executed.
- step 107 when the target parking space Mo is input, the parking space is set as the target parking space Mo.
- step 108 the control device 10 calculates a route for moving the host vehicle V to the target parking space Mo.
- FIG. 4D is a diagram illustrating a scene in which the parking space PL5 is designated as the target parking space Mo.
- the control device 10 calculates a path for parking based on the positional relationship between the position P4 of the host vehicle V that starts the parking operation (movement) and the position of the target parking space Mo.
- the control device 10 determines the curve L1 from the stop position of the host vehicle V, that is, the parking support start position to the intermediate position Mw to be turned back, and the intermediate position Mw to the target parking space Mo (PL5).
- the curve L2 is calculated as a route.
- the control device 10 reads the route corresponding to the selected parking mode, and calculates the route based on the positional relationship between the position of the host vehicle V and the position of the target parking space Mo when the automatic parking process is started.
- the control device 10 causes the vehicle controller 30 to execute a process of moving the host vehicle V to the target parking space Mo along the calculated route when the driver presses the deadman switch during the automatic parking mode described above.
- control apparatus 10 calculates the path
- the method of calculating the route at the time of parking has been described.
- the present invention is not necessarily limited thereto, and a route corresponding to the type of the parking space is stored in a memory (ROM), and the route is determined at the time of parking. You may make it read. Further, the driver of the host vehicle V may select the route parking mode (parallel parking, parallel parking, diagonal parking, etc.).
- step 109 the parking assistance device 100 of the present embodiment executes a parking assistance process or an automatic parking process.
- the parking assistance apparatus 100 of this embodiment controls the operation of the drive system 40 via the vehicle controller 30 so that the host vehicle V moves along the route.
- the parking assist device 100 feeds the output value of the steering angle sensor 50 provided in the steering device to the driving system 40 of the own vehicle V such as an EPS motor so that the traveling locus of the own vehicle V matches the calculated route.
- the command signal is calculated, and the command signal is sent to the drive system 40 or the vehicle controller 30 that controls the drive system 40.
- the parking support device 100 of this embodiment includes a parking support control unit.
- the parking assistance control unit acquires shift range information from the AT / CVT control unit, wheel speed information from the ABS control unit, rudder angle information from the rudder angle control unit, engine speed information from the ECM, and the like. Based on these, the parking assist control unit calculates and outputs instruction information related to automatic steering to the EPS control unit, instruction information such as a warning to the meter control unit, and the like.
- the control device 10 acquires, via the vehicle controller 30, each piece of information acquired by the steering angle sensor 50, the vehicle speed sensor 60, and other sensors provided in the steering device of the host vehicle V.
- the drive system 40 of the present embodiment moves (runs) the host vehicle V from the current position to the target parking space Mo by driving based on the control command signal acquired from the parking assist device 100.
- the steering device of the present embodiment is a drive mechanism that moves the host vehicle V in the left-right direction.
- the EPS motor included in the drive system 40 controls the steering amount by driving the power steering mechanism included in the steering device based on the control command signal acquired from the parking assist device 100, and sets the host vehicle V to the target parking space Mo. Support the operation when moving to.
- movement technique of parking assistance are not specifically limited, The technique known at the time of application can be applied suitably.
- the parking assist device 100 is configured to use an accelerator when moving the host vehicle V to the target parking space Mo along a route calculated based on the position P4 of the host vehicle V and the position of the target parking space Mo.
- the brake is automatically controlled based on the designated control vehicle speed (set vehicle speed), and the operation of the steering device is automatically controlled according to the vehicle speed. That is, the steering operation and the accelerator / brake operation are automatically performed at the time of parking assistance of the present embodiment.
- the parking assistance apparatus 100 of this embodiment is applicable also to the manual parking in which a driver operates an accelerator, a brake, and a steering.
- the parking assist device 100 controls the drive system 40 based on the preset vehicle speed calculated in advance so that the host vehicle V moves along the route, and also based on the preset steering angle calculated in advance. V steering device is controlled.
- the parking assistance device 100 includes an automatic travel mode that does not require the driver's operation and a manual operation mode that requires the driver's operation. Furthermore, the automatic travel mode includes a boarding operation mode in which the driver gets on and operates the host vehicle V, and a remote operation mode in which the driver remotely controls the host vehicle V from the outside of the host vehicle V.
- parking support information is presented using the output device 20 including the display 21.
- FIG. 7A shows an example of a display method of parking support information.
- two display areas are defined.
- the screen of the display 21 is divided into left and right, and a first display area on the left side and a second display area on the right side are defined.
- An overhead image (top view) 21a is displayed in the first display area 21a on the left side
- a monitoring image (normal view) 21b is displayed in the second display area 21b on the right side.
- a message 21c is displayed on the monitoring image 21b.
- the bird's-eye view image 21a as the first display area 21a includes an image (a boundary line of the parking space) indicating a selectable parking space. Moreover, the icon of the own vehicle V which shows the position of the own vehicle V is displayed on the center of the bird's-eye view image 21a.
- the monitoring image 21b can display captured images of different cameras 1a to 1d according to the operation state of the host vehicle V. In the monitoring image 21b shown in FIG. 7A, a captured image of the camera 1a is displayed on the front grill portion of the host vehicle V. When the host vehicle V moves backward, a captured image of the camera 1d disposed near the rear bumper may be displayed. In this example, the bird's-eye view image 21a and the monitoring image 21b are simultaneously shown on the display 21, but only the bird's-eye view image 21a may be shown on the display 21 or only the monitoring image 21b may be shown on the display 21.
- the bird's-eye view image 21a includes a captured image of a predetermined display area around the host vehicle V.
- the display area is an area in the real space including the host vehicle V.
- the size of the display area can be set according to the performance of the cameras 1a to 1d, the size of the display surface of the display 21, and the position of the virtual viewpoint of the overhead image (the height of P in FIG. 3).
- the display area R to be imaged is shown small due to space limitations, but the display area is, for example, about 10 m long and 5 m wide as shown in the bird's-eye view image 21a of FIG. It can be set within a range.
- the parking space that exists outside the predetermined display area is included in the first display area (overhead image) 21a and displayed. It may not be possible.
- the range of the display area is narrow, the parking space is outside the display area, and the image of the parking space may not be included in the display area of the display 21.
- the parking space is away from the runway of the host vehicle V (the current position of the host vehicle V)
- the parking space is outside the display area, and the image of the parking space is not included in the display area of the display 21. There is a case. If the width of the parking lot runway (width W1 in FIGS.
- FIG. 7B shows a display example in such a case.
- the image of the road surface occupies most of the display area, and the image of the parking space on both sides of the road cannot be displayed.
- FIG. 7C the example of a display when a runway is wide is shown to FIG. 7C.
- the image of the road surface occupies the display area of the display 21, and the presence of the parking space cannot be transmitted to the driver.
- the detected parking space may not be displayed in a predetermined display area (in this example, an overhead image display area) 21a on the display surface of the display 21.
- a predetermined display area in this example, an overhead image display area
- the parking assist device 100 of the present embodiment includes a parking space that is not displayed in the display area 21a. Is displayed on the display 21.
- the case where the area of the parking space area displayed in the display area 21a is less than a predetermined value includes the following cases (A) and (B).
- the area of the parking space may be stored in advance by the control device 10, may be calculated based on the size of the detected parking space, and is paired with the length of the detected parking frame line. You may calculate based on the distance of a parking frame line. Since a parking space and a parking runway appear in the display area 21a, the area of the parking space may be determined from the runway. In this case, the above conditions may be changed as follows. (C) The area of the runway appearing in the display area 21a (or the occupation ratio occupied by the video of the runway with respect to the display area 21a) or the width of the runway is greater than or equal to a predetermined value.
- the area of the parking space includes the length X (including X7A, X7B, and X7C) of the parking frame displayed within the frame of the display area 21a, or the interval Y (Y7A, Y7B, and Y7C) of the parking frame.
- the length X of the parking frame and the interval Y of the parking frame in the present embodiment are the length X of the parking frame and the interval Y of the parking frame in the overhead view viewed from the virtual viewpoint in the sky.
- the control device 10 of the present embodiment uses, as a captured image, a parking frame length X7A displayed in the frame of the display area 21a and a parking frame interval Y7A formed by a pair of lines shown in FIG. 7A. Calculate based on The control device 10 calculates the area of the parking space based on the parking frame interval Y7A. Since the parking space is defined according to the size of the vehicle, there are parking spaces for ordinary passenger cars and parking spaces for large vehicles such as buses and trucks, but the size is uniform. If the distance Y between the parking frames is known, the total length of the parking frames can be estimated. The relationship between the parking frame interval Y and the total length of the parking frame may be stored in advance. Of course, the area of the parking space itself may be stored.
- the control device 10 calculates the ratio of the area of the parking space that appears in the display area 21a to the area of the parking space. calculate.
- the control device 10 estimates the total length of the parking frame, subtracts the length X7A of the parking frame displayed in the frame of the display area 21a from the total length of the parking frame, and does not appear (hidden) in the display area 21a. The length of is calculated.
- the control device 10 calculates the ratio of the area of the parking space appearing in the display area 21a to the total area (predicted area) of the parking space obtained from the estimated total length of the parking frame and the interval Y7A of the parking frame. Similarly, the control device 10 determines the area of the parking space that does not appear (hidden) in the display area 21a with respect to the total area (predicted area) of the parking space obtained from the estimated total length of the parking frame and the interval Y7A of the parking frame. Calculate the percentage of.
- control device 10 appears in the display area 21a for the area of the parking space based on the length X7B of the parking frame displayed in the frame of the display area 21a and the interval Y7B of the parking frame. Calculate the ratio of the area of the parking space that does not appear or appears.
- control device 10 appears in the display area 21a with respect to the area of the parking space based on the length X7C of the parking frame displayed in the frame of the display area 21a and the interval Y7C of the parking frame. Calculate the ratio of the area of the parking space that does not appear or appears.
- the ratio Q of the area of the parking space that appears in the display area 21a to the area of the parking space is Q (7A)> Q ( 7B)> (Q7C).
- the ratio Q of the area of the parking space that does not appear in the display area 21a with respect to the area of the parking space is Q (7A) ⁇ Q (7B) ⁇ (Q7C).
- the ratio of the length X of the parking frame displayed (not displayed) within the frame of the display area 21a to the estimated total length of the parking frame is determined by parking. It may be regarded as a ratio of the area of the parking space that appears (not appears) in the display area 21a to the total area (predicted area) of the space.
- the ratio of the length X of the parking frame displayed (not displayed) within the frame of the display area 21a to the interval Y of the parking frame appears in the display area 21a with respect to the total area (predicted area) of the parking space (appears) Not) It may be considered as a percentage of the parking space area.
- the total length (Y direction) of the parking frame correlates with the interval Y of the parking frame. Since the line of the parking frame is hidden, it can be predicted that the parking space is hidden, and the degree of hiding of the parking space can be known based on the degree of hiding of the line of the parking frame.
- the control device 10 determines the length of the parking frame displayed in the frame of the display area 21a (the vehicle width direction of the host vehicle V), and the parking frame.
- the ratio of the area of the parking space that appears or does not appear in the display area 21a with respect to the area of the parking space is calculated based on the interval (the traveling direction of the host vehicle V).
- the control device 10 determines whether the parking space that actually exists is not visible or whether the parking space actually does not exist only by the length of the parking frame.
- the area is determined based on the length of the parking frame displayed in the frame of the display area 21a (the vehicle width direction of the host vehicle V) and the interval between the parking frames stored in advance (the traveling direction of the host vehicle V). It is preferable to calculate the ratio.
- the mark MK is displayed to notify the driver that the parking space exists outside the display area.
- the mark MK of the present embodiment is displayed to the occupant when the driver or the system is searching for a parking space.
- the search process for the parking space may be executed while traveling or may be executed while the vehicle is stopped. Thereby, when searching for a parking space, a passenger can be informed that an available parking space exists outside the display area.
- the aspect of the “mark MK” shown on the display 21 is not particularly limited.
- a figure may be drawn like a balloon in the display area 21a like a mark MK1 shown in FIG. 8A.
- the mark MK1 may be displayed in the display area 21b.
- the shape, color, mode, and display method (flashing, fade-in / fade-out display, etc.) of the mark MK1 are not particularly limited.
- Text information may also be displayed. For example, text such as “there is a parking space on the right / left side”, “cannot display the parking space”, or “there is a parking space outside the display area” may be displayed on the display 21.
- the text information may be output as voice via the speaker 22.
- the mark MK is preferably displayed in the display area 21a.
- the driver can be prevented from worrying by displaying the mark MK in the display area 21a. Furthermore, in this embodiment, since the mark MK is displayed when the parking space cannot be displayed in the display area 21a, the occupant (including the driver) instantly recognizes that the parking space exists outside the frame of the display area 21a. it can.
- the driver can be used even when the parking space is not displayed in the display area of the display.
- the mark MK of the present embodiment can be represented by a diagram showing a direction in which a parking space is present based on the host vehicle V.
- Diagrams indicating the direction in which a parking space exists include polygons such as triangles, rectangles, and diamonds, and arrow graphics.
- the mark MK2 may be an arrow graphic indicating the direction in which the parking space exists.
- the direction in which the parking space exists can be indicated by the direction indicated by the arrow.
- the relative distance from the own vehicle V to a parking space can be shown by lengthening the length of the arrow, so that the distance of the own vehicle V and a parking space is long.
- the mark MK of this embodiment can be expressed by an image showing a parking space.
- a diagram showing a parking space there are a rectangle such as a rectangle, a pair of substantially parallel straight lines, and a “U-shaped (U-shaped in Japanese)” that connects only a pair of straight lines and one end thereof.
- the mark MK3 may be a rectangular figure or U-shaped figure imitating a parking space, and the mark MK3 is represented by a rectangular figure or U-shaped figure that is the same as the shape of the parking space.
- the location of the parking space can be implied by the position of the figure.
- the display 21 of the present embodiment is a touch panel type display.
- the control device 10 recognizes a touch input of the mark MK displayed on the display 21 as an input of selection information of the mark MK.
- Each mark is associated with each parking space.
- the control device 10 recognizes the input of the mark MK selection information as the input of the parking space selection information associated therewith.
- the control device 10 sets the parking space associated with the mark MK as the target parking space Mo.
- the control device 10 enables the selection of the parking space using the corresponding mark MK even when the parking space cannot be displayed on the display 21.
- the mark MK functions as an icon switch for selecting a parking space.
- Each mark MK is associated with each parking space. It is preferable to arrange each mark MK next to each parking space so that the correspondence can be easily understood by the driver. Even when the parking lot road surface is wide and the left and right parking spaces cannot be displayed on the operation display, the parking assistance process can be executed.
- control device 10 displays the parking space corresponding to the mark MK selected by the occupant as the recommended parking space Mr. If the parking space cannot be displayed on the display 21, even if the recommended parking space Mr determined by the parking assist device 100 is indicated to the driver, the driver may not be able to accept it. In such a case, it is preferable to give priority to the driver's selection over the required parking cost for parking such as the required parking time.
- the control device 10 cannot display the parking space on the display 21, displays the mark MK, and corresponds to the mark MK when any mark MK is selected (selection information is input).
- the parking space to be determined is determined as the recommended parking space Mr.
- the recommended parking space Mr is preferably displayed by highlighting to be described later. Even in a situation where the parking space cannot be displayed on the display 21, the recommended parking space MK corresponding to the situation is selected, so that the merit of the parking assistance device (method) can be maintained.
- the parking space selected by the occupant may be set as a parking target space that is a parking target.
- the mark MK of the present embodiment can be displayed according to the location of the parking space.
- a diagram showing a parking space there is a diagram having a curvature such as a circle or an ellipse.
- a protrusion may be included in a part of the circular / elliptical figure, and the direction in which the parking space exists may be indicated by the direction.
- the mark MK4 (MK41, MK42, MK43) can represent the location of the parking space by expressing a curved figure (circular / elliptical) including the protrusions K1, K2, and K3. .
- a plurality of marks MK can be displayed.
- the plurality of marks MK can have different display modes. As shown in FIG. 8E, among the plurality of marks MK, a mark MK of a recommended parking space that is a parking available space that satisfies the above-described parking available condition and that satisfies the recommended parking condition may be highlighted. Although the parking space cannot be displayed, the presence of the recommended parking space and its position can be communicated to the driver by the mode of the mark MK indicating the parking space.
- Highlighting means a display mode that gives a relatively strong stimulus to the occupant's vision and attracts human attention relatively strongly.
- the non-emphasized display of an image means a display mode in which the effect of attracting the passenger's attention is relatively weak.
- the highlight display in the present embodiment can be expressed only in a relative relationship, but includes the following display.
- the mark MK of the recommended parking space is displayed with high luminance, and the mark MK of other parking spaces is displayed with low luminance.
- the high luminance display is a display in which the luminance is relatively increased.
- the line thickness of the mark MK of the recommended parking space is made relatively thick, and the line thickness of the diagram image of the mark MK of the other parking space is made relatively thin.
- a diagram of the mark MK of the recommended parking space is a solid line, and a diagram of the mark MK of the other parking spaces is a broken line.
- the diagram of the first display mode is a double line, and the diagram of the second display mode is a solid line or a broken line.
- the size of the diagram image of the mark MK of the recommended parking space is relatively increased, and the size of the diagram image of the mark MK of the other parking spaces is relatively decreased.
- the recommended parking space mark MK is displayed blinking, and the other parking space marks MK are displayed non-flashing.
- the blinking display is a display in which display and non-display are repeated at a predetermined cycle, or lighting and extinguishing are repeated.
- the flashing cycle in the flashing display of the mark MK of the recommended parking space is relatively shortened, and the flashing cycle in the flashing display of the mark MK of the other parking space is relatively long.
- the color of the recommended parking space mark MK diagram is displayed in an advanced color so that the colored diagram is relatively close, and the other parking space mark MK colors are colored. Is displayed in a receding color that appears relatively far away.
- the advancing color is a color in which a colored line diagram appears relatively close, and is a color of relatively warm color, high brightness, and high saturation in the hue circle, for example, yellow, orange, and red.
- the receding color is a color in which a colored diagram is seen relatively far away, and is a color of relatively cold color, low brightness, and low saturation in the hue circle, such as blue, purple, and black. is there. Images displayed with such advance colors appear to be relatively emphasized.
- the pixel density of the mark MK of the recommended parking space is increased, and the pixel density of the mark MK of the other parking spaces is decreased.
- the pixel density is the density of pixels in a region corresponding to a diagram image.
- the display is emphasized as the pixel density is high, and the display is not emphasized as the pixel density is low.
- the control device 10 expands a display area (real space) that can be displayed in a predetermined display area of the display 21. Then, an overhead image 21 a for the enlarged display area is created and displayed on the display 21. As described above, the control device 10 according to the present embodiment displays the parking space that could not be displayed by recreating the overhead image 21a in which the display area is enlarged even when the parking space cannot be displayed on the display 21. 21. Even when the parking lot road surface is wide and the left and right parking spaces cannot be displayed on the operation display, the parking assistance process can be executed.
- the control device 10 displays the mark MK with emphasis as the distance between the detected parking space and the host vehicle V is shorter.
- the host vehicle V moves forward while searching for a parking space.
- the host vehicle V approaches the target parking space Mo to be parked. That is, a parking space with a short distance from the host vehicle V has a higher driver's attention than a parking space with a long distance from the host vehicle V.
- the control apparatus 10 of this embodiment highlights the mark MK which shows a parking space, so that the distance with the own vehicle V is short. Thereby, even in a situation where the parking space cannot be displayed on the display 21, the presence of the parking space where the driver's attention is high can be emphasized and shown to the driver.
- a mark MK of a parking space that is close to the host vehicle V and is located in front of the host vehicle V is highlighted.
- the display according to the distance includes the following modes. For the explanation of terms, the above description is incorporated.
- a mark MK of a parking space that is relatively short with the host vehicle V is displayed with high luminance, and a mark MK of another parking space that is relatively long with the host vehicle V is displayed with low luminance.
- the thickness of the diagram of the mark MK of the parking space whose distance from the host vehicle V is relatively short is made relatively thick, and the mark MK of another parking space whose distance from the host vehicle V is relatively long The thickness of the diagram is made relatively thin.
- a solid line indicates a parking space mark MK with a relatively short distance from the host vehicle V, and a broken line indicates a parking space mark MK with a relatively long distance from the host vehicle V. It shows with.
- the diagram of the mark MK of the parking space whose distance from the host vehicle V is relatively short is indicated by a double line
- the diagram of the mark MK of another parking space whose distance from the host vehicle V is relatively long is indicated by a solid line or Shown in broken lines.
- the size of the diagram image of the mark MK of the parking space with a relatively short distance from the host vehicle V is relatively large, and the mark of another parking space with a relatively long distance from the host vehicle V
- the size of the MK diagram is relatively small.
- the mark MK of the parking space whose distance from the host vehicle V is relatively short is flashed and the mark MK of another parking space whose distance from the host vehicle V is relatively long is not flashed.
- the blinking cycle of the blinking mark MK of the parking space whose distance from the own vehicle V is relatively short is made relatively short, and the mark MK of another parking space whose distance from the own vehicle V is relatively long is blinked. Make the blinking cycle longer.
- the color of the diagram of the mark MK of the parking space whose distance from the host vehicle V is relatively short is displayed in the advance color, and the mark MK of another parking space whose distance from the host vehicle V is relatively long The color is indicated by the back color.
- the pixel density of the mark MK in the parking space with a relatively short distance from the host vehicle V is increased, and the pixel density of the mark MK in another parking space with a relatively long distance from the host vehicle V is decreased. .
- FIG. 9 is an example of a specific display of the mark MK according to the distance between the parking space and the host vehicle V.
- parking spaces PL2 and PR3 that cannot be parked and parking spaces PR2, PR4, PR5, PL3, PL4, and PL5 that can be parked (open) are shown.
- the mark MK3 of the parking space PL3 located closest to the host vehicle V is highlighted with a relatively thick solid line.
- the mark MK4 of the parking space PL4 next to the parking space PL3 from the host vehicle V is indicated by a solid line.
- the mark MK4 is thinner than the mark MK3.
- a mark MK5 of the parking space PL5 that is next to the parking space PL4 from the host vehicle V is indicated by a broken line.
- the marks MK are displayed so that the degree of emphasis is mark MK3 (most emphasized)> mark MK4> mark MK. .
- the distances between the parking space PL4, the parking space PR4, and the host vehicle V are substantially the same, they are indicated by solid lines having the same thickness.
- the display mode is not limited to this, and in order to emphasize the parking space PL4 adjacent to the nearest parking space PL3 more than the parking space PR4, the mark MK4 may be indicated by a solid line and the mark MK4 ′ may be indicated by a broken line.
- FIG. 10 is an example of a specific display of the mark MK according to the distance between the parking space and the host vehicle V.
- a display example of the mark MK when the distance is D1 is shown in FIG. 10A
- a display example of the mark MK when the distance is D2 is shown in FIG.
- FIG. 10C shows a display example of the mark MK when the distance is D3 as shown in FIG.
- the line thickness is displayed relatively narrower than the display examples in FIGS.
- a mark MK9a shown in FIG. 10A is indicated by a broken line.
- the mark MK9b shown in FIG. 10B is displayed with a thicker line than in the display example of FIG. 10A and thinner than the display example of FIG.
- the outline of the mark MK9b shown in FIG. 10B is indicated by a broken line.
- the mark MK9c shown in FIG. 10C is displayed with a thicker and thinner line thickness than the display example of FIG.
- the outer shape of the mark MK9c shown in FIG. 10C is indicated by a solid line.
- the control device 10 displays the mark MK so that the degree of emphasis increases as the distance to the host vehicle V is shorter.
- the control device 10 of the present embodiment highlights and displays the mark MK as the speed of the host vehicle V is lower.
- the host vehicle V moves forward while searching for a parking space.
- the host vehicle V decelerates when approaching the target parking space Mo where the vehicle V is to be parked. That is, when the speed of the host vehicle V decreases, the driver determines the target parking space Mo and determines that the possibility of parking is high.
- the control apparatus 10 of this embodiment highlights the mark MK which shows a parking space, so that the speed of the own vehicle V is low. Thereby, even in a situation where the parking space cannot be displayed on the display 21, the presence of the parking space can be emphasized and shown to the driver at the timing when the driver tries to park.
- the display according to the vehicle speed includes the following modes. For the explanation of terms, the above description is incorporated.
- FIG. 11 is a display example of the mark MK corresponding to the parking space and the speed of the host vehicle V.
- FIG. 11A shows a display example of the mark MK when the speed is V1
- FIG. 11 shows a display example of the mark MK when the speed is V2.
- FIG. 11C shows a display example of the mark MK when the distance is V3 as shown in FIG.
- the mark MK10a shown in FIG. 11 (a) is displayed with a figure size relatively smaller than the display examples of FIGS.
- the mark MK10b shown in FIG. 11B is displayed with a graphic size larger than the display example of FIG. 11A and smaller than the display example of FIG.
- the mark MK10c shown in FIG. 11 (c) is displayed with a figure size larger than the display examples in FIGS. 11 (a) and (b).
- the control device 10 of the present embodiment displays the mark MK so that the degree of emphasis increases as the vehicle speed decreases.
- the parking support information display method according to the embodiment of the present invention is used in the parking support apparatus as described above, the following effects can be obtained. Since the parking assistance apparatus 100 of this embodiment is comprised and operate
- a parking space detected based on a pre-defined parking condition is displayed in a predetermined display area 21 a defined on the display surface of the display 21.
- a mark MK indicating that there is a parking space not displayed on the display area 21a is displayed on the display 21.
- the mark MK which shows that the parking space which is not displayed on the display area 21a exists is displayed on the display 21.
- FIG. 1 when the area of the parking space area displayed in the display area 21a is less than a predetermined value, the mark MK is displayed to indicate that there is a parking space that can be used outside the display area. Can tell. Thereby, even if it is a case where a parking space is not displayed on the display area of a display, a user can make it usable.
- the mark MK indicates the direction in which the parking space exists based on the host vehicle V. Even if it is not displayed on the display 21, by displaying the mark MK, it is possible to inform the occupant that the parking space exists around the host vehicle V and / or where the parking space exists.
- the mark MK2 By expressing the mark MK2 with an arrow, the user can be notified that a parking space exists in the direction indicated by the arrow.
- the relative distance to a parking space can be shown by determining the length of the arrow according to the distance of the own vehicle V and a parking space.
- the mark MK indicates a parking space. Even if it is not displayed on the display 21, by displaying the mark MK, it is possible to inform the occupant that the parking space exists around the host vehicle V and / or where the parking space exists.
- the mark MK By expressing the mark MK with a rectangular figure or U-shaped figure that is common to the shape of the parking space, it can be implied that the parking space exists in the vicinity of the figure. The location of the parking space can be implied by the position of the figure.
- the parking space with a short distance from the host vehicle V has a higher driver's attention than the parking space with a far distance from the host vehicle V. Therefore, the smaller the distance from the host vehicle V, the more emphasized the mark MK indicating the parking space. indicate. Thereby, even in a situation where the parking space cannot be displayed on the display 21, the presence of the parking space where the driver's attention is high can be emphasized and shown to the driver.
- the lower the speed of the host vehicle V the higher the mark MK is displayed.
- the mark MK indicating the parking space is highlighted as the speed of the host vehicle V decreases. To do. Thereby, even in a situation where the parking space cannot be displayed on the display 21, it is possible to predict the timing at which the driver intends to park from the speed, and to emphasize the presence of the parking space to the driver.
- the parking space associated with the mark MK is set as the target parking space Mo. Even when the parking space cannot be displayed on the display 21, the parking space can be selected using the corresponding mark MK. Even when the parking lot road surface is wide and the left and right parking spaces cannot be displayed on the operation display, the parking assistance process can be executed.
- the parking support information display method of the present embodiment when the selection information of the mark MK is input, the display area that can be displayed in the predetermined display area 21a is enlarged. Even when the parking space cannot be displayed on the display 21, the parking space that could not be displayed is displayed on the display 21 by re-creating the overhead view image 21 a in which the display area is enlarged. Even when the parking lot road surface is wide and the left and right parking spaces cannot be displayed on the operation display, the parking assistance process can be executed.
- the parking space corresponding to the selected mark MK is displayed as a recommended parking space.
- the driver's own selection is given priority.
- the recommended parking space MK corresponding to the situation is selected, so that the merit of the parking assistance device (method) can be maintained.
- a recommended parking space that satisfies the recommended parking conditions belonging to the parking conditions is detected as a parking space, and there is a recommended parking space. Is marked on the display 21. Although the parking space cannot be displayed, the presence of the recommended parking space and its position can be communicated to the driver by the mode of the mark MK indicating the parking space.
- the parking support method / parking information display method described above can be implemented using the parking support device 100 of the present embodiment.
- the parking assistance apparatus 100 of this embodiment has the effect
- control device 10 and the parking support device 100 having the display 21 will be described as an example of the parking support device according to the present invention, but the present invention is not limited to this. Absent.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Theoretical Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Multimedia (AREA)
- Mathematical Physics (AREA)
- Business, Economics & Management (AREA)
- Educational Administration (AREA)
- Educational Technology (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- User Interface Of Digital Computer (AREA)
Abstract
Description
本実施形態の駐車支援装置100は、操舵操作を自動で行い、アクセル・ブレーキ操作をドライバが行う半自動タイプであってもよい。駐車支援装置100は、操舵操作、アクセル・ブレーキ操作が自動的に行われる自動制御タイプであってもよい。また、本実施形態の駐車支援装置100は、車両に搭乗せずに、外部から車両の動きを制御して、車両を所定の駐車スペースに駐車させるリモートコントロールタイプであってもよい。
本実施形態の駐車支援装置100は、ステアリング、アクセル、ブレーキを操作して自動で駐車させる自動駐車システム、ステアリング、アクセル、ブレーキのうち一部の操作を手動で行い、他の操作を自動で行う半自動駐車システムにも適用可能である。その他にも、駐車スペースへ至る経路を提示して、自車両を駐車スペースに誘導することにより駐車を支援するシステムにも適用可能である。
1.駐車枠線の検出条件
2.駐車スペースの検出条件
3.駐車可能条件
4.駐車推奨条件
(1)エッジの輝度差が所定閾値以上である。
(2)線の角度が所定閾値以内である。
(3)線の幅が所定閾値以内である。
(4)連続性のあるエッジ(線)の長さが所定値以上である。
(5)線間のノイズの輝度差が所定閾値未満である。
(6)上記(1)~(5)の評価値に基づいて算出された、駐車枠線としての確からしさを示す尤度(likelihood)が所定値以上である。
(1)駐車枠線の候補として抽出された線の中に、予め設定した第1閾値以上(例えば、実距離15[m]に対応する長さ)の長さを有する線が含まれていない。
(2)駐車枠線の候補として抽出された線の中に、予め設定した第2閾値以下(例えば、実距離3~5[m]に対応する長さ以下)であり、略平行な一対の線の中に予め設定した第3閾値以上(例えば、実距離7[m]に対応する長さ以上)の長さを有する線が含まれていないこと。
(3)駐車枠線の候補として抽出された線の中に、予め設定した第3閾値以下(例えば、実距離2.5~5[m]に対応する長さ以下)であり、略平行な一対の線の中に予め設定した第4閾値以上(例えば、実距離15[m]に対応する長さ以上)の長さを有する線の組が含まれていないこと。
駐車スペースの位置情報は、ナビゲーションシステムの地図情報に含めて記憶してもよい。駐車スペースの位置情報は、外部のサーバ又は施設(駐車場)の管理装置から取得してもよい。
本実施形態の「駐車可能条件」は、自車両Vの駐車が可能な駐車スペースを抽出する観点から定義される。
(1)自車両Vから所定距離範囲である。
(2)駐車スペースが空車である。
(3)障害物が無い。
本実施形態の「駐車推奨条件」は、駐車に要するコスト(「駐車所要コスト」ともいう。以下同じ。)が低い駐車スペースを抽出する観点から定義される。
(1)駐車に要する切り返し回数が所定回数以下である。
(2)駐車に要する時間が所定時間以下である。
(3)駐車に要する移動距離が所定距離以下である。
制御装置10は、自車両Vの車速に基づいて、注視点距離を算出する。注視点距離は、自車両Vの位置から自車両Vのドライバが注視する位置(注視点)までの距離に対応する。制御装置10は、ドライバが注視する位置に応じた駐車スペースを推奨駐車スペースとして検出する。
また、自車両Vに搭乗することなく、外部から自車両Vに目標駐車スペースMoの設定指令、駐車処理開始指令、駐車中断・中止指令などを送信して駐車を行うリモートコントロールによる駐車処理も可能である。
図7Aに、駐車支援情報の表示方法の一例を示す。図7Aに示す表示例では、二つの表示領域を定義した。
図7Aに示す表示例では、ディスプレイ21の画面を左右に分割し、左側の第1表示領域と右側の第2表示領域を定義する。左側の第1表示領域21aには俯瞰画像(トップビュー)21aを表示し、右側の第2表示領域21bには監視画像(ノーマルビュー)21bを表示する。監視画像21bの上には、メッセージ21cを表示する。第1表示領域21aとしての俯瞰画像21aには選択可能な駐車スペースを示す画像(駐車スペースの境界線)が含まれている。また、俯瞰画像21aの中央には、自車両Vの位置を示す自車両Vのアイコンが表示されている。監視画像21bは、自車両Vの操作状態に応じて異なるカメラ1a~1dの撮像画像を表示できる。図7Aに示す監視画像21bでは、自車両Vのフロントグリル部にカメラ1aの撮像画像が表示されている。自車両Vが後退する際には、リアバンパ近傍に配置されたカメラ1dの撮像画像を表示してもよい。また、本例では、俯瞰画像21aと監視画像21bとを同時にディスプレイ21に示すが、俯瞰画像21aのみをディスプレイ21に示してもよいし、監視画像21bのみをディスプレイ21に示してもよい。
表示エリアの範囲が狭い場合には、駐車スペースが表示エリア外となり、その駐車スペースの映像がディスプレイ21の表示領域内に含まれない場合がある。また、駐車スペースが自車両Vの走路(自車両Vの現在位置)から離れている場合には、駐車スペースが表示エリア外となり、その駐車スペースの映像がディスプレイ21の表示領域内に含まれない場合がある。駐車場の走路の幅(図4A~図4Dにおける幅W1)が広く、走路を挟んだ駐車スペースが離隔している場合は、ディスプレイ21の表示領域のほとんどを走路の映像が占めてしまい、駐車スペースの映像が表示できない場合がある。駐車場の右側又は左側に偏って走行している場合も、右側又は左側の駐車スペースの映像が表示できない場合がある。
(A)駐車スペースの面積のうち、表示領域21aに表れた駐車スペースの面積が所定割合未満である場合。
(B)駐車スペースの面積のうち、表示領域21aに表れない駐車スペースの面積が所定割合以上である場合。
駐車スペースの面積は、制御装置10が予め記憶していてもよいし、検出された駐車スペースの大きさに基づいて算出してもよいし、検出された駐車枠線の長さと、対となる駐車枠線の距離に基づいて算出してもよい。
表示領域21aには、駐車スペースと駐車用の走路とが現れるため、駐車スペースの面積を走路から判断してもよい。この場合には、上記条件を以下のように変更してもよい。
(C)表示領域21aに表れた走路の面積(若しくは表示領域21aに対する走路の映像が占める占有割合)又は走路の幅が所定値以上である場合。
駐車スペースの面積は、表示領域21aの枠内に表示される駐車枠の長さX(X7A,X7B,X7Cを含む。以下同じ。)又は駐車枠の間隔Y(Y7A,Y7B,Y7Cを含む。以下同じ。)の長さで擬制してもよい。
特に限定されないが、本実施形態の駐車枠の長さX、及び駐車枠の間隔Yは、上空の仮想視点から見た俯瞰画像における駐車枠の長さX、及び駐車枠の間隔Yとする。
制御装置10は、駐車枠の全長を推測し、駐車枠の全長から表示領域21aの枠内に表示される駐車枠の長さX7Aを差し引いて、表示領域21aに表れない(隠れた)駐車枠の長さを算出する。
駐車枠の間隔Yに対する、表示領域21aの枠内に表示される(表示されない)駐車枠の長さXの割合を、駐車スペースの全面積(予測面積)に対する、表示領域21aに表れた(表れない)駐車スペースの面積の割合と見做してもよい。駐車枠の全長(Y方向)と駐車枠の間隔Yとは相関するからである。
駐車枠の線が隠れていることから駐車スペースが隠れていることを予測でき、駐車枠の線の隠れ度合に基づいて、駐車スペースの隠れ度合を知ることができる。
例えば、図8Aに示すマークMK1のように、表示領域21aに吹き出しのように図形を描いてもよい。マークMK1は、表示領域21bに表示してもよい。マークMK1の形状、色、態様、表示手法(点滅、フェードイン/フェードアウト表示など)は特に限定されない。テキスト情報を併せて表示してもよい。例えば、「右側/左側に駐車スペースがあります」「駐車スペースが表示できません」「表示領域の外側に駐車スペースがあります」などのテキストをディスプレイ21に表示してもよい。テキスト情報はスピーカ22を介して音声出力してもよい。マークMKは、表示領域21aに表示することが好ましい。表示領域21aに駐車スペースが表示できない場合に、表示領域21aにマークMKを表示させることにより、ドライバを不安にさせないことができる。さらに、本実施形態では、表示領域21aに駐車スペースが表示できない場合にマークMKを表示するため、乗員(ドライバを含む)は、表示領域21aの枠外に駐車スペースが存在することを、瞬時に視認できる。
図8Eに示すように、複数のマークMKのうち、前述した駐車可能条件を満たす駐車可能スペースであり、かつ推奨駐車条件を満たす推奨駐車スペースのマークMKを強調表示してもよい。駐車スペースは表示できないが、駐車スペースを示すマークMKの態様により推奨駐車スペースの存在及びその位置をドライバに伝えることができる。
(2)推奨駐車スペースのマークMKの線の太さを相対的に太くし、その他の駐車スペースのマークMKの線図画像の線の太さを相対的に細くする。
(3)推奨駐車スペースのマークMKの線図を実線とし、その他の駐車スペースのマークMKの線図を破線とする。第1表示態様の線図を二重線とし、第2表示態様の線図を実線又は破線とする。
(4)推奨駐車スペースのマークMKの線図画像の大きさを相対的に大きくし、その他の駐車スペースのマークMKの線図画像の大きさを相対的に小さくする。
(5)推奨駐車スペースのマークMKを点滅表示し、その他の駐車スペースのマークMKを非点滅表示とする。点滅表示とは、所定周期で表示と非表示を繰り返す、又は点灯と消灯とを繰り返す表示である。推奨駐車スペースのマークMKの点滅表示における点滅周期を相対的に短くし、その他の駐車スペースのマークMKの点滅表示における点滅周期を相対的に長くする。
(6)推奨駐車スペースのマークMKの線図の色を、彩色された線図が相対的に近くに見える進出色で表示し、その他の駐車スペースのマークMKの色を、彩色された線図が相対的に遠くに見える後退色で表示する。進出色とは、彩色された線図が相対的に近くに見える色であって、色相環において相対的に暖色系、高明度、高彩度の色であり、例えば黄色、橙色、赤色である。他方後退色とは、彩色された線図が相対的に遠くに見える色であって、色相環において相対的に寒色系、低明度、低彩度の色であり、例えば青色、紫色、黒色である。このような進出色により表示された画像は相対的に強調されて見える。
(7)推奨駐車スペースのマークMKの画素密度を高くし、その他の駐車スペースのマークMKの画素密度を低くする。画素密度とは、線図画像に対応する領域の画素の密度である。画素密度が高いほど強調された表示となり、画素密度が低いほど強調しない表示となる。
このように、本実施形態の制御装置10は、ディスプレイ21に駐車スペースを表示できない場合であっても、表示エリアを拡大した俯瞰画像21aを再作成することにより、表示できなかった駐車スペースをディスプレイ21に表示する。駐車場の路面が広く左右の駐車スペースが操作ディスプレイに表示できない場合であっても、駐車支援処理を実行できる。
(1)自車両Vとの距離が相対的に短い駐車スペースのマークMKを高輝度表示とし、自車両Vとの距離が相対的に長い他の駐車スペースのマークMKを低輝度表示とする。
(2)自車両Vとの距離が相対的に短い駐車スペースのマークMKの線図の太さを相対的に太くし、自車両Vとの距離が相対的に長い他の駐車スペースのマークMKの線図の太さを相対的に細くする。
(3)自車両Vとの距離が相対的に短い駐車スペースのマークMKの線図を実線で示し、自車両Vとの距離が相対的に長い他の駐車スペースのマークMKの線図を破線で示す。自車両Vとの距離が相対的に短い駐車スペースのマークMKの線図を二重線で示し、自車両Vとの距離が相対的に長い他の駐車スペースのマークMKの線図を実線又は破線で示す。
(4)自車両Vとの距離が相対的に短い駐車スペースのマークMKの線図画像の大きさを相対的に大きく示し、自車両Vとの距離が相対的に長い他の駐車スペースのマークMKの線図図形の大きさを相対的に小さく示す。
(5)自車両Vとの距離が相対的に短い駐車スペースのマークMKを点滅表示し、自車両Vとの距離が相対的に長い他の駐車スペースのマークMKを非点滅表示する。自車両Vとの距離が相対的に短い駐車スペースのマークMKを点滅表示の点滅周期を相対的短くし、自車両Vとの距離が相対的に長い他の駐車スペースのマークMKを点滅表示の点滅周期を相対的に長くする。
(6)自車両Vとの距離が相対的に短い駐車スペースのマークMKの線図の色を進出色で表示し、自車両Vとの距離が相対的に長い他の駐車スペースのマークMKの色を後退色で示す。
(7)自車両Vとの距離が相対的に短い駐車スペースのマークMKの画素密度を高くし、自車両Vとの距離が相対的に長い他の駐車スペースのマークMKの画素密度を低くする。
(1)自車両Vの車速が相対的に低い場合には、駐車スペース(推奨駐車スペース、駐車可能スペースを含む。以下、同じ。)のマークMKを高輝度表示とし、自車両Vの車速が相対的に高い場合には駐車スペースのマークMKを低輝度表示とする。
(2)自車両Vの車速が相対的に低い場合には、駐車スペースのマークMKの線図の太さを相対的に太くし、自車両Vの車速が相対的に高い場合には、駐車スペースのマークMKの線図の太さを相対的に細くする。
(3)自車両Vの車速が相対的に低い場合には、駐車スペースのマークMKの線図を実線で示し、自車両Vの車速が相対的に高い場合には、駐車スペースのマークMKの線図を破線で示す。自車両Vの車速が相対的に低い場合には、駐車スペースのマークMKの線図を二重線で示し、自車両Vの車速が相対的に高い場合には、駐車スペースのマークMKの線図を実線又は破線で示す。
(4)自車両Vの車速が相対的に低い場合には、駐車スペースのマークMKの線図画像の大きさを相対的に大きく示し、自車両Vの車速が相対的に高い場合には、駐車スペースのマークMKの線図図形の大きさを相対的に小さく示す。
(5)自車両Vの車速が相対的に低い場合には、駐車スペースのマークMKを点滅表示し、自車両Vの車速が相対的に高い場合には、駐車スペースのマークMKを非点滅表示する。自車両Vの車速が相対的に低い場合には、駐車スペースのマークMKを点滅表示の点滅周期を相対的に短くし、自車両Vの車速が相対的に高い場合には、駐車スペースのマークMKを点滅表示の点滅周期を相対的長くする。
(6)自車両Vの車速が相対的に低い場合には、駐車スペースのマークMKの線図の色を進出色で表示し、自車両Vの車速が相対的に高い場合には、駐車スペースのマークMKの色を後退色で示す。
(7)自車両Vの車速が相対的に低い場合には、駐車スペースのマークMKの画素密度を高くし、自車両Vの車速が相対的に高い場合には、駐車スペースのマークMKの画素密度を低くする。
100…駐車支援装置
10…制御装置
11…CPU
12…ROM
13…RAM
20…出力装置
21…ディスプレイ
22…スピーカ
1a~1d…車載カメラ
2…画像処理装置
3…測距装置
30…車両コントローラ
40…駆動システム
50…操舵角センサ
60…車速センサ
V…自車両
Me…駐車可能スペース,駐車可能マーク
Mr…推奨駐車スペース,推奨マーク
Mo…目標駐車スペース
Claims (10)
- ディスプレイと、制御装置と、を備える駐車支援装置において使用される、駐車支援情報の表示方法であって、
前記制御装置は、
予め定義された駐車条件に基づいて駐車スペースを特定し、
前記特定された駐車スペースを前記ディスプレイの表示面に定義された所定の表示領域に表示する際に、前記表示領域に表示される前記駐車スペースの領域の面積が所定値未満である場合には、前記表示領域に表示されない前記駐車スペースが存在することを示すマークを前記ディスプレイに表示する駐車支援情報の表示方法。 - 前記マークは、自車両を基準とした前記駐車スペースが存在する方向を示す請求項1に記載の表示方法。
- 前記マークは、前記駐車スペースを示す請求項1又は2に記載の表示方法。
- 前記制御装置10は、
前記特定された駐車スペースと自車両との距離が近いほど、前記マークを強調して表示する請求項1~3の何れか一項に記載の表示方法。 - 前記制御装置10は、
自車両の速度が低いほど、前記マークを強調して表示する請求項1~4の何れか一項に記載の表示方法。 - 前記ディスプレイは情報の入力を受け付け、
前記制御装置は、
前記マークの選択情報が入力された場合には、前記マークに対応づけられた駐車スペースを目標駐車スペースとして設定する請求項1~5の何れか一項に記載の表示方法。 - 前記制御装置は、
前記マークの選択情報が入力された場合には、所定の表示領域に表示可能な表示エリアを拡大する請求項1~6の何れか一項に記載の表示方法。 - 前記制御装置は、
前記選択されたマークに対応する駐車スペースを、推奨する駐車スペースとして表示する請求項7に記載の表示方法。 - 前記制御装置は、
駐車可能な駐車可能スペースを検出し、
前記駐車可能スペースのうち、前記駐車条件に属する駐車推奨条件を充足する推奨駐車スペースを前記駐車スペースとして検出し、
前記推奨駐車スペースが存在することを示すマークを、前記ディスプレイに強調表示する請求項1~8の何れか一項に記載の表示方法。 - ディスプレイと、制御装置と、を備え、
前記制御装置は、
予め定義された駐車条件に基づいて駐車スペースを検出し、
前記検出された駐車スペースを前記ディスプレイの表示面に定義された所定の表示領域に表示し、
前記表示領域に表示される前記駐車スペースの領域の面積が所定値未満である場合には、前記表示領域に表示されない前記駐車スペースが存在することを示すマークを前記ディスプレイに表示する駐車支援装置。
Priority Applications (11)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP15906702.4A EP3367364B1 (en) | 2015-10-22 | 2015-10-22 | Parking support information display method and parking support device |
| US15/768,963 US10366611B2 (en) | 2015-10-22 | 2015-10-22 | Parking support information display method and parking support device |
| MX2018004890A MX2018004890A (es) | 2015-10-22 | 2015-10-22 | Metodo de presentacion visual de informacion de asistencia de estacionamiento y dispositivo de asistencia de estacionamiento. |
| CA3002636A CA3002636C (en) | 2015-10-22 | 2015-10-22 | Parking support information display method and parking support device |
| BR112018007665A BR112018007665A2 (pt) | 2015-10-22 | 2015-10-22 | método de exibição de informações de suporte de estacionamento e dispositivo de suporte de estacionamento |
| KR1020187013550A KR102126824B1 (ko) | 2015-10-22 | 2015-10-22 | 주차 지원 정보의 표시 방법 및 주차 지원 장치 |
| CN201580083952.7A CN108140311B (zh) | 2015-10-22 | 2015-10-22 | 停车辅助信息的显示方法及停车辅助装置 |
| RU2018118330A RU2691540C1 (ru) | 2015-10-22 | 2015-10-22 | Способ отображения информации содействия при парковке и устройство содействия при парковке |
| MYPI2018701523A MY188803A (en) | 2015-10-22 | 2015-10-22 | Parking support information display method and parking support device |
| PCT/JP2015/079890 WO2017068696A1 (ja) | 2015-10-22 | 2015-10-22 | 駐車支援情報の表示方法及び駐車支援装置 |
| JP2017546352A JP6493552B2 (ja) | 2015-10-22 | 2015-10-22 | 駐車支援情報の表示方法及び駐車支援装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2015/079890 WO2017068696A1 (ja) | 2015-10-22 | 2015-10-22 | 駐車支援情報の表示方法及び駐車支援装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017068696A1 true WO2017068696A1 (ja) | 2017-04-27 |
Family
ID=58558231
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/079890 WO2017068696A1 (ja) | 2015-10-22 | 2015-10-22 | 駐車支援情報の表示方法及び駐車支援装置 |
Country Status (11)
| Country | Link |
|---|---|
| US (1) | US10366611B2 (ja) |
| EP (1) | EP3367364B1 (ja) |
| JP (1) | JP6493552B2 (ja) |
| KR (1) | KR102126824B1 (ja) |
| CN (1) | CN108140311B (ja) |
| BR (1) | BR112018007665A2 (ja) |
| CA (1) | CA3002636C (ja) |
| MX (1) | MX2018004890A (ja) |
| MY (1) | MY188803A (ja) |
| RU (1) | RU2691540C1 (ja) |
| WO (1) | WO2017068696A1 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018203214A (ja) * | 2017-06-09 | 2018-12-27 | アイシン精機株式会社 | 駐車支援装置、駐車支援方法、運転支援装置、および運転支援方法 |
| WO2019073872A1 (ja) * | 2017-10-10 | 2019-04-18 | アイシン精機株式会社 | 駐車支援装置 |
| CN110450717A (zh) * | 2018-05-08 | 2019-11-15 | 丰田自动车株式会社 | 驻车辅助装置 |
| KR20200014366A (ko) * | 2017-07-07 | 2020-02-10 | 닛산 지도우샤 가부시키가이샤 | 주차 지원 방법 및 주차 지원 장치 |
| JP2020040441A (ja) * | 2018-09-07 | 2020-03-19 | 本田技研工業株式会社 | 自動駐車装置及び自動駐車方法 |
| EP3531396A4 (en) * | 2016-10-19 | 2020-06-24 | ZTE Corporation | TERMINAL ON BOARD OF A VEHICLE, PARKING SPACE SHARING SYSTEM, METHOD AND APPARATUS FOR DETERMINING PARKING SPACE |
| JP2020154881A (ja) * | 2019-03-20 | 2020-09-24 | ヤフー株式会社 | 情報処理装置、情報処理方法および情報処理プログラム |
| JP2021000958A (ja) * | 2019-06-24 | 2021-01-07 | 本田技研工業株式会社 | 駐車支援システム |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180037414A (ko) * | 2016-10-04 | 2018-04-12 | 엘지전자 주식회사 | 자동주차 보조장치 및 이를 포함하는 차량 |
| JP6869467B2 (ja) * | 2017-04-24 | 2021-05-12 | アイシン精機株式会社 | 駐車支援装置 |
| KR101964919B1 (ko) * | 2017-05-26 | 2019-08-13 | 주식회사 만도 | 주차 제어 장치 및 그 방법 |
| JP6859216B2 (ja) * | 2017-07-03 | 2021-04-14 | トヨタ自動車株式会社 | 車両周辺表示装置 |
| JPWO2019012848A1 (ja) * | 2017-07-11 | 2020-04-16 | 日立オートモティブシステムズ株式会社 | 駐車支援装置 |
| JP7130923B2 (ja) * | 2017-07-19 | 2022-09-06 | 株式会社アイシン | 表示制御装置 |
| US11100729B2 (en) * | 2017-08-08 | 2021-08-24 | Panasonic Intellectual Property Corporation Of America | Information processing method, information processing system, and program |
| DE102018205968A1 (de) * | 2018-04-19 | 2019-10-24 | Volkswagen Aktiengesellschaft | Verfahren zum Betreiben eines Parkassistenzsystems eines Kraftfahrzeugs und Parkassistenzsystem für ein Kraftfahrzeug |
| CN111354215B (zh) * | 2018-12-21 | 2022-10-25 | 奥迪股份公司 | 停车辅助方法、系统、计算机设备及可读存储介质 |
| JP2020121638A (ja) * | 2019-01-30 | 2020-08-13 | アイシン精機株式会社 | 表示制御装置 |
| JP7329167B2 (ja) * | 2019-02-14 | 2023-08-18 | 株式会社ガイアート | コンクリート床版構造体および大型車両駐車場構造 |
| JP7058234B2 (ja) * | 2019-03-06 | 2022-04-21 | 本田技研工業株式会社 | 車両制御装置、情報提供装置、情報提供システム、車両制御方法、情報提供方法、およびプログラム |
| KR102512921B1 (ko) * | 2019-05-08 | 2023-03-22 | 구글 엘엘씨 | 스팟파인더 |
| KR20200139311A (ko) * | 2019-06-03 | 2020-12-14 | 현대자동차주식회사 | 차량 및 그 제어방법 |
| JP7238838B2 (ja) * | 2020-03-30 | 2023-03-14 | トヨタ自動車株式会社 | 自動運転システム |
| CN111746522B (zh) * | 2020-06-29 | 2021-08-27 | 广州橙行智动汽车科技有限公司 | 一种泊车交互方法和装置 |
| CN112389422B (zh) * | 2020-11-17 | 2022-10-14 | 广州小鹏自动驾驶科技有限公司 | 一种越障方法和装置 |
| JP7484802B2 (ja) * | 2021-04-14 | 2024-05-16 | トヨタ自動車株式会社 | 情報処理装置、プログラム及び情報処理方法 |
| CN113104029B (zh) * | 2021-05-19 | 2023-10-31 | 广州小鹏汽车科技有限公司 | 一种基于自动驾驶的交互方法和装置 |
| US11999342B2 (en) * | 2021-05-26 | 2024-06-04 | Panasonic Automotive Systems Co., Ltd. | Display control device, parking assist apparatus and display control method |
| US20220379882A1 (en) * | 2021-05-28 | 2022-12-01 | Jaguar Land Rover Limited | Apparatus and method for controlling vehicle movement |
| JP2024062073A (ja) * | 2022-10-24 | 2024-05-09 | 本田技研工業株式会社 | 制御装置、制御方法、及び制御プログラム |
| EP4410635A1 (en) * | 2023-01-31 | 2024-08-07 | Aptiv Technologies AG | Assisted parking system |
| CN115841766B (zh) * | 2023-02-22 | 2023-07-04 | 青岛慧拓智能机器有限公司 | 一种矿区作业区域停靠点车位推荐方法 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008080959A (ja) * | 2006-09-27 | 2008-04-10 | Aisin Aw Co Ltd | 駐車支援装置および駐車支援方法 |
| JP2008096362A (ja) * | 2006-10-13 | 2008-04-24 | Denso Corp | 車載用ナビゲーション装置 |
| WO2012086052A1 (ja) * | 2010-12-24 | 2012-06-28 | パイオニア株式会社 | 画像制御装置、制御方法、プログラム、及び記憶媒体 |
| JP2013007668A (ja) * | 2011-06-24 | 2013-01-10 | Navitime Japan Co Ltd | 情報処理装置、情報表示装置、情報表示システム、情報表示方法および情報表示プログラム |
| JP2014162451A (ja) * | 2013-02-27 | 2014-09-08 | Toyota Motor Corp | 駐車支援装置 |
| JP2015069429A (ja) * | 2013-09-30 | 2015-04-13 | 富士通テン株式会社 | 情報案内システム、表示装置、サーバ装置、情報案内方法及びプログラム |
| JP2015074262A (ja) * | 2013-10-04 | 2015-04-20 | 本田技研工業株式会社 | 駐車支援装置 |
Family Cites Families (40)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6683539B2 (en) * | 2001-12-27 | 2004-01-27 | Koninklijke Philips Electronics N.V. | Computer vision based parking assistant |
| CA2555563C (en) * | 2005-08-05 | 2009-03-31 | Weatherford/Lamb, Inc. | Apparatus and methods for creation of down hole annular barrier |
| CN101360974B (zh) * | 2006-01-20 | 2011-11-09 | 三菱电机株式会社 | 导航装置 |
| CN101009049A (zh) * | 2006-01-26 | 2007-08-01 | 易卫东 | 停车场空位检测系统 |
| JP4432930B2 (ja) * | 2006-04-25 | 2010-03-17 | トヨタ自動車株式会社 | 駐車支援装置及び駐車支援方法 |
| JP4791262B2 (ja) * | 2006-06-14 | 2011-10-12 | 本田技研工業株式会社 | 運転支援装置 |
| JP4844323B2 (ja) | 2006-09-27 | 2011-12-28 | アイシン・エィ・ダブリュ株式会社 | 駐車支援装置および駐車支援方法 |
| DE102007045562A1 (de) * | 2007-09-24 | 2009-04-02 | Robert Bosch Gmbh | Steuereinrichtung für eine Anzeigeeinrichtung einer Einparkeinrichtung und Verfahren zur Darstellung |
| JP5380941B2 (ja) * | 2007-10-01 | 2014-01-08 | 日産自動車株式会社 | 駐車支援装置及び方法 |
| DE102007055391A1 (de) * | 2007-11-20 | 2009-05-28 | Valeo Schalter Und Sensoren Gmbh | Verfahren und Vorrichtung zur Bahnplanung beim Einparken eines Fahrzeugs |
| WO2009078356A1 (ja) * | 2007-12-18 | 2009-06-25 | Honda Motor Co., Ltd. | 車両用駐車可否判定装置、車両用駐車スペース検出装置および車両用移動可能範囲検出装置 |
| AU2008358268A1 (en) * | 2008-06-25 | 2009-12-30 | Tomtom International B.V. | Navigation apparatus and method of detection that a parking facility is sought |
| US8103911B2 (en) * | 2008-07-25 | 2012-01-24 | International Business Machines Corporation | Method and system for disaster recovery based on journal events pruning in a computing environment |
| KR20100029985A (ko) * | 2008-09-09 | 2010-03-18 | 엘지전자 주식회사 | 주차 정보 제공 방법 및 장치 |
| JP5380994B2 (ja) * | 2008-10-10 | 2014-01-08 | 日産自動車株式会社 | 駐車支援装置及び駐車支援方法 |
| JP2012040883A (ja) * | 2008-12-19 | 2012-03-01 | Panasonic Corp | 車両周囲画像生成装置 |
| RU97312U1 (ru) * | 2010-05-11 | 2010-09-10 | Артем Вадимович Касаткин | Система автоматизированной парковки транспортного средства |
| US8825221B2 (en) * | 2010-06-04 | 2014-09-02 | Volkswagen Ag | Method and device for assisting parking of a motor vehicle |
| DE102010034139A1 (de) * | 2010-08-12 | 2012-02-16 | Valeo Schalter Und Sensoren Gmbh | Verfahren zur Unterstützung eines Parkvorgangs eines Kraftfahrzeugs, Fahrerassistenzsystem und Kraftfahrzeug |
| JP2012076483A (ja) | 2010-09-30 | 2012-04-19 | Aisin Seiki Co Ltd | 駐車支援装置 |
| US8571722B2 (en) * | 2010-10-22 | 2013-10-29 | Toyota Motor Engineering & Manufacturing North America, Inc. | Method for safely parking vehicle near obstacles |
| DE102010051206A1 (de) * | 2010-11-12 | 2012-05-16 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum Erzeugen eines Bilds einer Fahrzeugumgebung und Abbildungsvorrichtung |
| US8542130B2 (en) * | 2011-04-06 | 2013-09-24 | Ford Global Technologies | Integration of global positioning system and active parking assist functionalities |
| KR101877570B1 (ko) * | 2012-04-04 | 2018-07-11 | 현대자동차주식회사 | Av 영상 기반의 주차위치 설정 장치 및 그 방법 |
| US9656690B2 (en) * | 2012-10-30 | 2017-05-23 | Robert Bosch Gmbh | System and method for using gestures in autonomous parking |
| KR101438941B1 (ko) * | 2012-12-11 | 2014-11-03 | 현대자동차주식회사 | 주차 지원 제어 장치 및 방법 |
| CN103198703B (zh) * | 2013-03-01 | 2015-09-23 | 上海喜泊客信息技术有限公司 | 展示停车场信息的系统及方法 |
| DE102013004493A1 (de) * | 2013-03-14 | 2014-09-18 | Schlauerparken Ug | Verfahren zur Anzeige von Parkplätzen |
| CN104512463B (zh) * | 2013-10-04 | 2017-04-26 | 本田技研工业株式会社 | 停车辅助装置 |
| CN104575091A (zh) * | 2013-10-18 | 2015-04-29 | 西安造新电子信息科技有限公司 | 停车场引导系统 |
| JP2015101310A (ja) * | 2013-11-28 | 2015-06-04 | トヨタ自動車株式会社 | 車両の走行状態表示装置 |
| WO2015149252A2 (zh) * | 2014-03-31 | 2015-10-08 | 富士通株式会社 | 信号重传装置、方法以及通信系统 |
| EP3153356B1 (en) * | 2014-07-01 | 2018-09-19 | Nissan Motor Co., Ltd | Display device for vehicle and display method for vehicle |
| JP2016032127A (ja) * | 2014-07-25 | 2016-03-07 | 富士通株式会社 | 無線通信システム、歪補償装置、及び歪補償方法 |
| EP3072710B1 (en) * | 2015-03-24 | 2018-03-28 | LG Electronics Inc. | Vehicle, mobile terminal and method for controlling the same |
| JP6523018B2 (ja) * | 2015-03-31 | 2019-05-29 | 株式会社デンソーテン | 駐車支援装置、及び駐車支援システム |
| JP5910903B1 (ja) * | 2015-07-31 | 2016-04-27 | パナソニックIpマネジメント株式会社 | 運転支援装置、運転支援システム、運転支援方法、運転支援プログラム及び自動運転車両 |
| US9827983B2 (en) * | 2015-11-24 | 2017-11-28 | Wellen Sham | Automated vehicle parking |
| KR101832466B1 (ko) * | 2016-06-14 | 2018-04-13 | 엘지전자 주식회사 | 자동주차 보조장치 및 이를 포함하는 차량 |
| KR101979694B1 (ko) * | 2016-11-04 | 2019-05-17 | 엘지전자 주식회사 | 차량에 구비된 차량 제어 장치 및 그의 제어방법 |
-
2015
- 2015-10-22 KR KR1020187013550A patent/KR102126824B1/ko active IP Right Grant
- 2015-10-22 CA CA3002636A patent/CA3002636C/en active Active
- 2015-10-22 WO PCT/JP2015/079890 patent/WO2017068696A1/ja active Application Filing
- 2015-10-22 EP EP15906702.4A patent/EP3367364B1/en active Active
- 2015-10-22 RU RU2018118330A patent/RU2691540C1/ru active
- 2015-10-22 BR BR112018007665A patent/BR112018007665A2/pt not_active Application Discontinuation
- 2015-10-22 JP JP2017546352A patent/JP6493552B2/ja active Active
- 2015-10-22 CN CN201580083952.7A patent/CN108140311B/zh active Active
- 2015-10-22 MY MYPI2018701523A patent/MY188803A/en unknown
- 2015-10-22 US US15/768,963 patent/US10366611B2/en active Active
- 2015-10-22 MX MX2018004890A patent/MX2018004890A/es active IP Right Grant
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008080959A (ja) * | 2006-09-27 | 2008-04-10 | Aisin Aw Co Ltd | 駐車支援装置および駐車支援方法 |
| JP2008096362A (ja) * | 2006-10-13 | 2008-04-24 | Denso Corp | 車載用ナビゲーション装置 |
| WO2012086052A1 (ja) * | 2010-12-24 | 2012-06-28 | パイオニア株式会社 | 画像制御装置、制御方法、プログラム、及び記憶媒体 |
| JP2013007668A (ja) * | 2011-06-24 | 2013-01-10 | Navitime Japan Co Ltd | 情報処理装置、情報表示装置、情報表示システム、情報表示方法および情報表示プログラム |
| JP2014162451A (ja) * | 2013-02-27 | 2014-09-08 | Toyota Motor Corp | 駐車支援装置 |
| JP2015069429A (ja) * | 2013-09-30 | 2015-04-13 | 富士通テン株式会社 | 情報案内システム、表示装置、サーバ装置、情報案内方法及びプログラム |
| JP2015074262A (ja) * | 2013-10-04 | 2015-04-20 | 本田技研工業株式会社 | 駐車支援装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3367364A4 * |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3531396A4 (en) * | 2016-10-19 | 2020-06-24 | ZTE Corporation | TERMINAL ON BOARD OF A VEHICLE, PARKING SPACE SHARING SYSTEM, METHOD AND APPARATUS FOR DETERMINING PARKING SPACE |
| JP2018203214A (ja) * | 2017-06-09 | 2018-12-27 | アイシン精機株式会社 | 駐車支援装置、駐車支援方法、運転支援装置、および運転支援方法 |
| EP3650287A4 (en) * | 2017-07-07 | 2020-07-01 | Nissan Motor Co., Ltd. | PARKING ASSISTANCE METHOD AND PARKING ASSISTANCE DEVICE |
| RU2737641C1 (ru) * | 2017-07-07 | 2020-12-01 | Ниссан Мотор Ко., Лтд. | Способ помощи при парковке и устройство помощи при парковке |
| KR20200014366A (ko) * | 2017-07-07 | 2020-02-10 | 닛산 지도우샤 가부시키가이샤 | 주차 지원 방법 및 주차 지원 장치 |
| US12122300B2 (en) | 2017-07-07 | 2024-10-22 | Nissan Motor Co., Ltd. | Parking assistance method and parking assistance device |
| EP4019342A1 (en) * | 2017-07-07 | 2022-06-29 | NISSAN MOTOR Co., Ltd. | Parking assistance method and parking assistance device |
| KR102362485B1 (ko) | 2017-07-07 | 2022-02-15 | 닛산 지도우샤 가부시키가이샤 | 주차 지원 방법 및 주차 지원 장치 |
| CN111094083A (zh) * | 2017-10-10 | 2020-05-01 | 爱信精机株式会社 | 停车辅助装置 |
| WO2019073872A1 (ja) * | 2017-10-10 | 2019-04-18 | アイシン精機株式会社 | 駐車支援装置 |
| JP2019069717A (ja) * | 2017-10-10 | 2019-05-09 | アイシン精機株式会社 | 駐車支援装置 |
| CN111094083B (zh) * | 2017-10-10 | 2022-06-14 | 株式会社爱信 | 停车辅助装置 |
| CN110450717A (zh) * | 2018-05-08 | 2019-11-15 | 丰田自动车株式会社 | 驻车辅助装置 |
| JP2020040441A (ja) * | 2018-09-07 | 2020-03-19 | 本田技研工業株式会社 | 自動駐車装置及び自動駐車方法 |
| JP2020154881A (ja) * | 2019-03-20 | 2020-09-24 | ヤフー株式会社 | 情報処理装置、情報処理方法および情報処理プログラム |
| JP7043447B2 (ja) | 2019-03-20 | 2022-03-29 | ヤフー株式会社 | 情報処理装置、情報処理方法および情報処理プログラム |
| JP2021000958A (ja) * | 2019-06-24 | 2021-01-07 | 本田技研工業株式会社 | 駐車支援システム |
| US11498553B2 (en) | 2019-06-24 | 2022-11-15 | Honda Motor Co., Ltd. | Parking assist system |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3367364B1 (en) | 2024-07-17 |
| EP3367364A1 (en) | 2018-08-29 |
| US10366611B2 (en) | 2019-07-30 |
| RU2691540C1 (ru) | 2019-06-14 |
| MX2018004890A (es) | 2018-07-06 |
| JPWO2017068696A1 (ja) | 2018-09-20 |
| EP3367364A4 (en) | 2018-10-24 |
| KR102126824B1 (ko) | 2020-06-25 |
| CN108140311B (zh) | 2021-08-24 |
| CA3002636C (en) | 2023-01-10 |
| KR20180069854A (ko) | 2018-06-25 |
| MY188803A (en) | 2022-01-04 |
| BR112018007665A2 (pt) | 2018-11-06 |
| CA3002636A1 (en) | 2017-04-27 |
| CN108140311A (zh) | 2018-06-08 |
| JP6493552B2 (ja) | 2019-04-03 |
| US20180308358A1 (en) | 2018-10-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6493552B2 (ja) | 駐車支援情報の表示方法及び駐車支援装置 | |
| JP6627882B2 (ja) | 駐車支援情報の表示方法及び駐車支援装置 | |
| JP6493551B2 (ja) | 駐車支援方法及び駐車支援装置 | |
| JP6547836B2 (ja) | 駐車支援方法及び駐車支援装置 | |
| JP6562081B2 (ja) | 駐車スペースの枠線の検出方法および装置 | |
| JP6617773B2 (ja) | 駐車支援方法及び駐車支援装置 | |
| JP6531832B2 (ja) | 駐車スペース検出方法および装置 | |
| WO2017068700A1 (ja) | 駐車スペース検出方法および装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15906702 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15768963 Country of ref document: US |
|
| ENP | Entry into the national phase |
Ref document number: 3002636 Country of ref document: CA |
|
| ENP | Entry into the national phase |
Ref document number: 2017546352 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: MX/A/2018/004890 Country of ref document: MX |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| REG | Reference to national code |
Ref country code: BR Ref legal event code: B01A Ref document number: 112018007665 Country of ref document: BR |
|
| ENP | Entry into the national phase |
Ref document number: 20187013550 Country of ref document: KR Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2018118330 Country of ref document: RU Ref document number: 2015906702 Country of ref document: EP |
|
| ENP | Entry into the national phase |
Ref document number: 112018007665 Country of ref document: BR Kind code of ref document: A2 Effective date: 20180416 |