本発明の実施形態の説明では、図中に矢印で示す左右、前後、上下を使用する。図1に示す印刷システム1は、プラテン50を搬送しながら、プラテン50に支持された被印刷媒体に、前処理、印刷処理、及び後処理を施す。被印刷媒体の一例は、Tシャツ等の布帛である。布帛の材質の一例は、綿、ポリエステル、綿とポリエステルとの混合等である。
図1を参照し、印刷システム1の構成を説明する。印刷システム1は、前処理装置2、プリンタ3~8、後処理装置9、プラテン搬送機構10、コードリーダー95等を備える。前処理装置2は、印刷システム1の前側に配置され、プラテン50に支持された布帛Pに前処理を行う。前処理装置2は、例えば、塗布部と熱処理部を備える。塗布部は、スプレーで前処理剤を噴霧し、プラテン50に支持された布帛Pに前処理剤を塗布する。前処理剤は、布帛Pにインクが塗布される前に塗布されるベースコート剤である。前処理剤は、インクがより布帛Pに留まるように、布帛の繊維間に造膜を形成する為の液体であり、例えば、樹脂成分、CaCl2等の金属塩を含む水溶液である。熱処理部は、布帛Pに塗布した前処理剤を高温で加熱する。この結果、前処理剤の布帛Pへの定着が向上し、印刷画像の画質が向上する。
前処理装置2の後方において、左側に3つのプリンタ3~5が前後方向に並び、右側に3つのプリンタ6~8が前後方向に並ぶ。プリンタ3~8は、プラテン50に支持された前処理後の布帛Pに、印刷ヘッドのノズルからインクを吐出して印刷を行うインクジェットプリンタである。後処理装置9は、プリンタ3~8の後方に配置され、プラテン50に支持された印刷済みの布帛Pを高温で加熱して、インクを乾燥させることにより、インクの布帛Pへの定着を向上させる。プラテン搬送機構10は、後述する準備位置100に配置されたプラテン50を、前処理装置2、プリンタ3~8の何れか、及び後処理装置9の順に搬送し、再度準備位置100に返送する。
後述する準備位置100に設けられたコードリーダー95は、布帛Pに設けられた識別情報部(図示略)から布帛Pを識別する為の識別情報を読み取り、読み取った識別情報を印刷システム1に入力する。識別情報部は、布帛Pを識別する為の情報であり、例えば、バーコード等の一次元コード、QRコード(登録商標)等の二次元、及び三次元等のコードの情報である。識別情報は、布帛Pの種類、色、サイズ、印刷の色、印刷のサイズ等の情報を含んでもよい。
図1を参照し、プラテン搬送機構10の構成を説明する。プラテン搬送機構10は、発送ライン201、左側処理ライン202、右側処理ライン203、第1返送ライン204、及び第2返送ライン205を備える。
発送ライン201は、印刷システム1の最前部において、左右方向に延びる直線状に延設され、後述する左側処理ライン202、及び右側処理ライン203に向けてプラテン50を搬送する。発送ライン201は、左側から順に、搬送機構11~13を備える。搬送機構11には、準備位置100が設けられる。準備位置100は、プラテン50に布帛Pを取り付けて準備する為の位置である。搬送機構11~13は、プラテン50を右方に搬送する。搬送機構11と12の間には、後述する搬送機構14の前端部が配置される。搬送機構12と13の間には、後述する搬送機構24の前端部が配置される。
左側処理ライン202及び右側処理ライン203は、発送ライン201と後述する第1返送ライン204との間において、左右方向に並んで設けられる。左側処理ライン202は、発送ライン201から受け取ったプラテン50を前処理装置2、プリンタ3~5の何れか、及び後処理装置9の順に搬送し、第1返送ライン204に受け渡す。右側処理ライン203は、発送ライン201から受け取ったプラテン50を前処理装置2、プリンタ6~8の何れか、及び後処理装置9の順に搬送し、第1返送ライン204に受け渡す。
左側処理ライン202は、搬送機構14~23、及び印刷搬送機構41~43を備える。搬送機構14は、発送ライン201の搬送機構11と12の間から後方に延び、前処理装置2の内部を通過してさらに後方に延びる。搬送機構14は、搬送機構11からプラテン50を受け取り、前処理装置2を通過して後方に搬送する。搬送機構15は、搬送機構14からプリンタ3に向けて左方に延びる。搬送機構15は、搬送機構14からプラテン50を受け取り、プリンタ3に向けて搬送する。搬送機構16は、プリンタ3から左方に延びる。搬送機構16は、プリンタ3からプラテン50を受け取り、左方に搬送する。
搬送機構17は、搬送機構15の後方において、搬送機構14からプリンタ4に向けて左方に延びる。搬送機構17は、搬送機構14からプラテン50を受け取り、プリンタ4に向けて搬送する。搬送機構18は、プリンタ4から左方に延びる。搬送機構18は、プリンタ4からプラテン50を受け取り、左方に搬送する。搬送機構19は、搬送機構17の後方において、搬送機構14からプリンタ5に向けて左方に延びる。搬送機構19は、搬送機構14からプラテン50を受け取り、プリンタ5に向けて搬送する。搬送機構20は、プリンタ5から左方に延びる。搬送機構20は、プリンタ5からプラテン50を受け取り、左方に搬送する。
搬送機構21は、プリンタ3~5の左方において、前後方向に延び、搬送機構16、18、20の夫々の左端部と連結する。搬送機構21は、搬送機構16、18、20の夫々からプラテン50を受け取り、後方に搬送する。搬送機構22は、プリンタ5の後方において、搬送機構21の後端部から右方に延びる。搬送機構22は、搬送機構21からプラテン50を受け取り、右方に搬送する。搬送機構23は、搬送機構22の右端部から後方に延び、後処理装置9の内部を通過してさらに後方に延びる。搬送機構23は、搬送機構22からプラテン50を受け取り、後処理装置9を通過して後方に搬送する。搬送機構23の後端部は、後述する第1返送ライン204の搬送機構27と28の間に配置される。
印刷搬送機構41は、プリンタ3に設けられ、プラテン50を左右方向に搬送可能である。印刷搬送機構41は、プラテン支持部材60、ボールネジ3A、一対のレール3B、搬送モータ137(図12参照)を備える。プラテン支持部材60は、搬送機構15からプラテン50を受け取って支持する。ボールネジ3Aは左右方向に延びる。一対のレール3Bは、ボールネジ3Aを中央に挟む位置に設けられ、左右方向に延びる。ボールネジ3Aに螺合するナット(図示略)は、プラテン支持部材60に固定される。
搬送モータ137はボールネジ3Aを回転させる。これにより、プラテン支持部材60は、搬送モータ137の駆動により、ボールネジ3Aに沿ってナットと共に移動可能となる。なお、プラテン支持部材60を搬送する構成は、上記構成以外の構成でもよく、例えば、一対のプーリ、無端状ベルト、及びモータを備えてもよい。無端状ベルトは、一対のプーリに掛け渡される。プラテン支持部材60は、無端状ベルトの一部に固定する。モータが一方のプーリを正逆方向に回転することで、無端状ベルトが一対のプーリ間において移動する。これにより、プラテン支持部材60は、無端状ベルトと共に移動可能となる。
プリンタ4には、印刷搬送機構42が設けられ、プリンタ5には、印刷搬送機構43が設けられる。印刷搬送機構42、43は、印刷搬送機構41と同一構成なので、説明を省略する。
右側処理ライン203は、左側処理ライン202と左右対称構造なので、説明を省略する。右側処理ライン203は、前端側に搬送機構24を備え、後端側に搬送機構25を備える。搬送機構24は、左側処理ライン202の搬送機構14と同一構造である。搬送機構24の前端部は、発送ライン201の搬送機構12と13の間に配置される。搬送機構25は、左側処理ライン202の搬送機構23と同一構造である。搬送機構25の後端部は、後述する第1返送ライン204の搬送機構26と27の間に配置される。
第1返送ライン204は、印刷システム1の最後部において、左右方向に直線状に延設され、左側処理ライン202、及び右側処理ライン203から受け取ったプラテン50を左方に向けて返送する。第1返送ライン204は、右側から順に、搬送機構26~28を備える。搬送機構26~28は、プラテン50を左方に搬送する。搬送機構27と28の間には、左側処理ライン202の搬送機構23の後端部が配置される。搬送機構26と27の間には、右側処理ライン203の搬送機構25の後端部が配置される。
第2返送ライン205は、前後方向に直線状に延設され、第1返送ライン204から受け取ったプラテン50を前方に向けて返送し、搬送機構11に受け渡す。第2返送ライン205は、搬送機構29を備える。搬送機構29は、プラテン50を前方に搬送する。搬送機構11に受け渡されたプラテン50は、搬送機構11によって準備位置100に戻る。
発送ライン201の搬送機構13は、他の処理ライン(図示略)に向けてプラテン50を搬送してもよい。他の処理ラインは、左側処理ライン202、及び右側処理ライン203と同一構成であってもよい。第1返送ライン204の搬送機構26は、他の処理ライン(図示略)から受け取ったプラテン50を左方に搬送してもよい。
図1を参照し、プラテン搬送機構10のベルト構成を説明する。左側処理ライン202と右側処理ライン203の夫々のベルト構成は、左右対称である以外は共通なので、左側処理ライン202のベルト構成を説明し、右側処理ライン203のベルト構成の説明は省略する。搬送機構11~13は、一対の横ベルト11A~13Aを備える。横ベルト11A~13Aは、平面視で搬送機構11~13の搬送方向に直交する方向の両端部に設けられ、プラテン50を右方に搬送する。
搬送機構14は、一対の縦ベルト14A、及び一対の横昇降ベルト14B~14Eを備える。一対の縦ベルト14Aは、平面視で搬送機構14の搬送方向に直交する方向の両端部に設けられる。一対の縦ベルト14Aは、プラテン50を後方に搬送する。一対の横昇降ベルト14B~14Eは、一対の縦ベルト14Aの間に配置される。一対の横昇降ベルト14Bは、搬送機構14の前端部において昇降可能に設けられる。一対の横昇降ベルト14Bは、プラテン50を右方に搬送する。一対の横昇降ベルト14Cは、搬送機構15の右側において昇降可能に設けられる。一対の横昇降ベルト14Dは、搬送機構17の右側において昇降可能に設けられる。一対の横昇降ベルト14Eは、搬送機構19の右側において昇降可能に設けられる。一対の横昇降ベルト14C~14Eは、プラテン50を左方に搬送する。
搬送機構15~20は、一対の横搬送ベルト15A~20Aを備える。一対の横搬送ベルト15A~20Aは、平面視で搬送機構15~20の搬送方向に直交する方向の両端部において、昇降可能に設けられる。
搬送機構21は、一対の縦ベルト21A、及び一対の横昇降ベルト21B~21Eを備える。一対の縦ベルト21Aは、平面視で搬送機構21の搬送方向に直交する方向の両端部に設けられる。一対の縦ベルト21Aは、プラテン50を後方に搬送する。一対の横昇降ベルト21B~21Eは、一対の縦ベルト21Aの間に配置され、夫々搬送機構16、18、20、22の左側において昇降可能に設けられる。一対の横昇降ベルト21B~21Dは、プラテン50を左方に搬送し、一対の横昇降ベルト21Eは、プラテン50を右方に搬送する。
搬送機構22は、一対の横ベルト22Aを備える。一対の横ベルト22Aは、平面視で搬送機構22の搬送方向に直交する方向の両端部に設けられ、右方に向けてプラテン50を搬送する。搬送機構23は、一対の縦ベルト23A、及び一対の横昇降ベルト23B、23Cを備える。一対の縦ベルト23Aは、平面視で搬送機構23の搬送方向に直交する方向の両端部に設けられる。一対の縦ベルト23Aは、プラテン50を後方に搬送する。一対の横昇降ベルト23B、23Cは、一対の縦ベルト23Aの間に配置され、夫々搬送機構22、28の右側において昇降可能に設けられる。一対の横昇降ベルト23Bは、プラテン50を右方に搬送し、一対の横昇降ベルト23Cは、プラテン50を左方に搬送する。
搬送機構26~28は、搬送方向に延びる一対の横ベルト26A~28Aを備え、各搬送機構26~28における搬送方向、すなわち左方にプラテン50を搬送する。搬送機構29は、一対の縦ベルト29A、及び一対の横昇降ベルト29B、29Cを備える。一対の縦ベルト29Aは、平面視で搬送機構29の搬送方向に直交する方向の両端部に設けられる。一対の縦ベルト29Aは、プラテン50を前方に搬送する。一対の横昇降ベルト29B、29Cは、一対の縦ベルト29Aの間に配置され、夫々搬送機構28、11の左側において昇降可能に設けられる。一対の横昇降ベルト29Bは、プラテン50を左方に搬送し、一対の横昇降ベルト29Cは、プラテン50を右方に搬送する。
図12に示すように、プラテン搬送機構10は、縦ベルトモータ131、横ベルトモータ132、横昇降ベルトモータ133、横搬送ベルトモータ134、第1昇降モータ135、第2昇降モータ136、搬送モータ137、昇降モータ69等をさらに備える。縦ベルトモータ131は、縦ベルト14A、21A、23A、29Aの夫々に対応して設けられ、各ベルトを駆動する。横ベルトモータ132は、横ベルト11A~13A、22A、26A~28Aの夫々に対応して設けられ、各ベルトを駆動する。横昇降ベルトモータ133は、横昇降ベルト14B~14E、21B~21E、23B、23C、29B、29Cの夫々に対応して設けられ、各ベルトを駆動する。横搬送ベルトモータ134は、横搬送ベルト15A~20Aの夫々に対応して設けられ、各ベルトを駆動する。第1昇降モータ135は、横昇降ベルト14B~14E、21B~21E、23B、23C、29B、29Cの夫々に対応して設けられ、各ベルトを昇降する。第2昇降モータ136は、横搬送ベルト15A~20Aの夫々に対応して設けられ、各ベルトを昇降する。
図1を参照し、プラテン搬送機構10によるプラテン搬送動作の一例を説明する。各横昇降ベルトの位置には、図示しないセンサが配置される。センサは対応する横昇降ベルト上にあるプラテン50を検出できる。CPU101は、これらセンサからの検出信号に基づき、各ベルトの駆動、及び昇降を制御する。準備位置100からプラテン50の搬送が指示されると横ベルト11Aが駆動し、プラテン50が右方に向けて搬送される。このとき、横昇降ベルト14Bは、横ベルト11Aと同じ高さ位置に配置され、プラテン50は、横ベルト11Aから横昇降ベルト14Bに受け渡される。その後、横昇降ベルト14Bは駆動を停止し、下降する。これと同時に、縦ベルト14Aが駆動する。横昇降ベルト14Bが縦ベルト14Aよりも下降することにより、プラテン50は、縦ベルト14A上に載置され、後方に向けて搬送される。プラテン50は、前処理装置2を通過し、後方に向けてさらに搬送される。
プラテン50が横昇降ベルト14C上に到達すると、縦ベルト14Aの駆動が停止し、横昇降ベルト14Cが上昇を開始する。横昇降ベルト14Cは、縦ベルト14Aよりも上昇し、横搬送ベルト15Aと同じ高さ位置で停止する。横搬送ベルト15Aと横昇降ベルト14Cが駆動し、プラテン50が、横昇降ベルト14Cから横搬送ベルト15Aに受け渡される。横搬送ベルト15Aが駆動し、プラテン50がプリンタ3に向けて搬送される。プラテン50は、横搬送ベルト15Aからプリンタ3内部に設けられたプラテン支持部材60に受け渡される。なお、プラテン50が、横搬送ベルト15Aからプラテン支持部材60に受け渡される具体的手順については、後述する。
プラテン50は、プラテン支持部材60によって支持され、一対のレール3Bに沿って左方に搬送され、プリンタ3の内部で印刷される。印刷後、プラテン50はプリンタ3内部から左方に搬送され、一対のレール3Bの左端位置で停止する。次いで、横搬送ベルト16Aが上昇すると、プラテン50が横搬送ベルト16Aによって持ち上げられ、プラテン支持部材60から離れる。次いで、搬送機構21の横昇降ベルト21Bが、横搬送ベルト16Aと同じ高さ位置まで上昇する。横搬送ベルト16Aと横昇降ベルト21Bが駆動し、プラテン50が横搬送ベルト16Aから横昇降ベルト21Bに受け渡される。横昇降ベルト21Bは駆動を停止し、下降する。これと同時に、搬送機構21の縦ベルト21Aが駆動する。横昇降ベルト21Bが縦ベルト21Aよりも下降することにより、プラテン50は、縦ベルト21A上に載置され、後方に向けて搬送される。
以後、詳述しないが、プラテン50は、上記と同様の受け渡し動作で、搬送機構21、22、23の順に搬送され、後処理装置9を通過する。後処理装置9を通過したプラテン50は、左側処理ライン202から第1返送ライン204、第1返送ライン204から第2返送ライン205の順に受け渡され、発送ライン201の搬送機構11に受け渡されて、準備位置100に戻る。
図2~図5を参照し、プラテン50の構造を説明する。図1中に示す工程Aは、プラテン50を、搬送機構15、プリンタ3、及び搬送機構16の順に搬送する工程である。以下図2から図24の説明は、説明の便宜上、図1中に示す工程Aにおいて、紙面右方(搬送方向上流側)をプリンタ3の前方とし、紙面左方(搬送方向下流側)をプリンタ3の後方とし、紙面上方をプリンタ3の右方とし、紙面下方をプリンタ3の左方とする。プラテン50の向きは、工程Aにおける方向に倣い、図2~図5、図14~図20中に示す方向で説明する。プリンタ4~8においても、工程Aと同様の工程が設けられるが、第1実施形態では、工程Aを一例にして説明する。
図2、図3に示すように、プラテン50は、台座51、右側面板52、左側面板53、下板54、上板55、及び取付板56を備える。台座51は、平面視矩形状に形成される。台座51の上面における左右方向の略中央部には、一対の支持部材570、580が、左右方向に互いに離れた位置に固定される。図4に示すように、右側面板52は、右側面視逆L字状に形成され、上方延設部521と前方延設部522を備える。上方延設部521は、台座51から上下方向に延びる。前方延設部522は、上方延設部521の上部から前方に延設され、前後方向に延びる。前方延設部522の前端部は、上部から下部に向かって後方に傾斜する。台座51の上面において、右側面板52は、図2に示す支持部材570の左側に配置される。右側面板52の上方延設部521の下端部は、支持部材570の左面に対し、ネジ(図示略)で固定される。これにより、右側面板52は、台座51の上面において立設される。
図5に示すように、左側面板53は、右側面板52と同様に、上方延設部531と前方延設部532を備え、左側面視L字状に形成される。前方延設部532の前端部は、上部から下部に向かって後方に傾斜する。台座51の上面において、左側面板53は、支持部材580の右側に配置される。左側面板53の上方延設部531の下端部は、支持部材580の右面に対し、ネジ(図示略)で固定される。これにより、左側面板53は、台座51の上面において、右側面板52と平行に立設される。
図3~図5に示すように、下板54は、右側面板52の前方延設部522の下端部の前側部分と、左側面板53の前方延設部532の下端部の前側部分とを接続する。上板55は、右側面板52の上端部と、左側面板53の上端部とを接続し、下板54と平行に設けられる。上板55は、台座51より小さい平面視略矩形状である。取付板56は、上板55の上面に対し、金属板であるスペーサ55Aを介して固定される。取付板56は、台座51より小さく且つ上板55より大きい平面視略矩形状に形成される。取付板56の上面には、布帛Pが取り付けられる。
Tシャツなどの上着が布帛Pとして取付板56に取り付けられた場合、上着の首周りはプラテン50の前方に位置し、裾は後方に位置する。この上着の裾の垂れ下がりを防止する為、プラテン50の後方に、垂れ下がり防止板56Aが設けられる。この垂れ下がり防止板56Aは取付板56の下方において、スペーサ55Aの後端から取付板56の後端よりも後方に延び、さらにそこから上方に延びる。
図6~図9を参照し、プラテン支持部材60の構造を説明する。図6~図8に示すように、プラテン支持部材60は、基台61、立柱62、昇降テーブル63、第1位置決めシリンダ70、第2位置決めシリンダ80、及び近接センサ90を備える。基台61は、平面視左右方向に長い略矩形状に形成される。基台61の下面における左右方向中央部には、被ガイド部64が設けられる。被ガイド部64は前後方向に延び、且つ下方に向けて開口する断面U字状に形成される。被ガイド部64には、ボールネジ3A(図1、図6参照)が挿入される。基台61の下面における左右方向の両端部には、被ガイド部65、66が設けられる。被ガイド部65、66は前後方向に延び、且つ下方に向けて開口する断面U字状に形成される。被ガイド部65、66は、一対のレール3Bに沿って移動可能に支持される。従って、基台61は、一対のレール3Bに沿って前後方向に精度よく移動可能である。
立柱62は、基台61の上面の左右方向の略中央部に立設され、上方に延びる略直方体状に形成される。図7に示すように、立柱62の右面には、一対のレール67、ボールネジ68、及び昇降モータ69が設けられる。一対のレール67は、立柱62の右面の前後の両端部に沿って設けられ、上下方向に延びる。ボールネジ68は、一対のレール67の間に設けられ、回転可能に軸支される。ボールネジ68には、ナット681が螺合する。ナット681は、昇降テーブル63に設けられる後述する垂下板638に固定される。昇降モータ69は、ボールネジ68の上方に設けられる。昇降モータ69の出力軸は下方に突出し、ボールネジ68の上端部と連結する。昇降モータ69は、これに限られず、ボールネジ68の下方に位置し、その出力軸が上方に突出し、図示しないプーリとベルトを介してボールネジ68と接続してもよい。また、ボールネジ68は、送りネジであればよく、例えば、台形ネジでもよい。
図6に示すように、昇降テーブル63は、下面が開口する略箱状に形成され、上板631、右板632、左板633、及び垂下板638(図7参照)を備える。上板631は、平面視前後方向に長い略矩形状である。上板631の上面の前側には、3つの凸部634~636が設けられる。凸部634は、上板631の上面の前端部における左右方向の略中央部に設けられる。凸部635は、凸部634よりも後方で、且つ上板631の上面の右端部近傍に設けられる。凸部636は、凸部634よりも後方で、且つ上板631の上面の左端部近傍に設けられる。すなわち、3つの凸部634~636は、上板631の上面において平面視三角形の各頂点に夫々配置される。凸部634~636は、前後方向に長いリブ状である。
右板632は、上板631の右端部から下方に延びる。左板633は、上板631の左端部から下方に延びる。左板633の前端側には、開口637が設けられる。図7に示すように、垂下板638は、昇降テーブル63の内側から下方に垂下し、右側面視略矩形状に形成される。垂下板638は、昇降テーブル63を支持する。垂下板638は、立柱62の右面において、一対のレール67に沿って上下方向に移動可能に支持される。垂下板638の左面には、ナット681が固定される。
図8、図9に示すように、第1位置決めシリンダ70は、平面視で昇降テーブル63の外形よりも内側に配置され、上板631の下面の前端側、及び右板632の内面の前端側に夫々密着して固定される。第1位置決めシリンダ70は、後述する水平ピン75(図10参照)の先端部を左方に延ばし、昇降テーブル63上に載置されるプラテン50の左側面板53に接触して押圧することで、プラテン50を水平方向に位置決めする。第2位置決めシリンダ80は、第1位置決めシリンダ70と同様に、平面視で昇降テーブル63の外形よりも内側に配置される。第2位置決めシリンダ80は、上板631の下面における第1位置決めシリンダ70の後側に隣接する位置に固定され、第1位置決めシリンダ70と同様に、昇降テーブル63の外形よりも内側に配置される。第2位置決めシリンダ80は、後述するピン84を下方に移動し、昇降テーブル63上に載置されるプラテン50の下板54の上面に接触して押圧することで、プラテン50を上下方向に位置決めする。
近接センサ90は、昇降テーブル63の上板631の下面における前端側に固定され、平面視で昇降テーブル63の外形よりも内側に隠れる位置に配置される。近接センサ90は、昇降テーブル63上に載置されるプラテン50を検出可能である。近接センサ90、及び後述する近接センサ79は、例えば、誘導形近接センサ、静電容量形近接センサ、磁気近接センサ等でよい。
図10を参照し、第1位置決めシリンダ70の構造を説明する。第1位置決めシリンダ70はエアシリンダであり、本体部71、円筒部73、水平ピン75、及び近接センサ79等を備える。略直方体状の本体部71の内部には、ピストンを有するシリンダチューブ(図示略)が設けられる。
水平ピン75は金属製であり、左右方向に延びる略円柱状である。水平ピン75の左方の先端部には、テーパ部751が設けられる。テーパ部751は、左方に向けて径が小さくなる略円錐状である。テーパ部751の径R(図19参照)は、プラテン50の左側面板53に設けられた後述する挿入穴59の大径r1よりも小さく、小径r2よりも大きい。水平ピン75は、ピストンの往復運動により、円筒部73の内側において左右方向に出退可能である。第1位置決めシリンダ70は、昇降テーブル63の内側において、本体部71の右面が昇降テーブル63の右板632の内面上部に密着した状態でネジ等で固定される。第1位置決めシリンダ70が昇降テーブル63の内側に固定された状態では、円筒部73は、昇降テーブル63の左板633に設けられた開口637の内側に配置される(図6参照)。
近接センサ79は、本体部71の内部の所定位置に設けられる。所定位置とは、例えば、水平ピン75が左方に伸び切ったときのエアチューブ内のピストンに近接する位置である。近接センサ79は、ピストンが近接したことを検出する。
図11を参照し、第2位置決めシリンダ80の構造を説明する。第2位置決めシリンダ80は、支持部材81、本体部82、シリンダロッド83、ピン84、支軸86、本体支軸818、及び近接センサ89等を備える。
支持部材81は、平面視前方に向けて開口する略U字状に形成される。支持部材81は、後板811、右板812、及び左板813を備える。右板812は、後板811の右端部から前方に延設される。右板812の中央よりもやや後側の位置には、開口部817が設けられる。右板812における開口部817の前側で且つ下端寄りの位置には、軸支穴814が設けられる。右板812の上端部には、固定片815、816が前後方向に離れて設けられる。固定片815、816は、右板812の上端部から右方に突出する。
左板813は、後板811の左端部から前方に延設される。左板813における右板812の軸支穴814と対向する位置には、軸支穴(図示略)が設けられる。支軸86は左右方向に延び、右板812の軸支穴814と、左板813の軸支穴に挿入して固定される。本体支軸818も左右方向に延び、右板812における開口部817の後側に近接する位置に設けられた軸支穴(図示略)と、左板813の後端側であって、右板812の軸支穴と相対する位置に設けられた軸支穴(図示略)に挿入して固定される。左板813の上端部にも、固定片815、816が前後方向に離れて設けられる。固定片815、816は、左板813の上端部から左方に突出する。右板812及び左板813の夫々の固定片815、816は、昇降テーブル63の上板631の下面にネジで固定される。これにより、支持部材81が上板631の下面に固定される。
本体部82は、支持部材81の内側に配置され、本体支軸818に揺動可能に軸支される。シリンダロッド83は、本体部82の前面の略中央部から前後方向に出退可能に設けられ、シリンダチューブ内のピストンと連結する。シリンダロッド83の先端部には、U字部831が固定される。U字部831は、平面視前方に向けて開口する略U字状である。U字部831の内側には、左右方向に延びる支軸832が支持される。
ピン84は、基部841と円柱部842を備える。基部841は、略直方体状である。円柱部842は、基部841の側面から前方に対して斜め下方に延びる。なお、円柱部842の先端部85の外周の角部には、R部851が設けられてもよい。R部851は、先端に向けて径が小さくなるように円弧状に形成されてもよい。基部841の一部は、シリンダロッド83のU字部831の内側に配置される。基部841は、支持部材81に固定された支軸86に対して揺動可能に支持される。さらに、基部841は、支軸86よりも上方において、U字部831の支軸832に対しても揺動可能に支持される。従って、本体部82とピン84は、支持部材81の内側において、本体支軸818と支軸86によって支持される。
近接センサ89は、本体部82の内部の所定位置に設けられる。所定位置とは、例えば、シリンダロッド83が前方に伸び切ったときのエアチューブ内のピストンに近接する位置である。近接センサ89は、ピストンが近接したことを検出する。
図12を参照し、印刷システム1の電気的構成を説明する。印刷システム1は、CPU101、ROM102、RAM103、記憶部104、前処理装置2、プリンタ3~8、後処理装置9、操作部110、入出力部111、近接センサ79、89、90、異物検出センサ93、コードリーダー95、駆動回路121~130、縦ベルトモータ131、横ベルトモータ132、横昇降ベルトモータ133、横搬送ベルトモータ134、第1昇降モータ135、第2昇降モータ136、搬送モータ137、昇降モータ69、第1位置決めシリンダ70、第2位置決めシリンダ80等を備え、バスを介して互いに接続されている。
CPU101は、印刷システム1の動作を制御する。ROM102は各種プログラムを記憶する。RAM103はワーキングメモリであり、各種情報を一時的に記憶する。記憶部104は不揮発性のフラッシュメモリであり、各種情報を記憶する。操作部110は、作業者による各種入力を受け付ける。操作部110はタッチパネル(図示略)でもよく、各種入力の受付に加え、各種情報を表示してもよい。入出力部111は、SDメモリカードスロット、及びUSB(登録商標)ポート及び他の規格のシリアルポート等を備える。
駆動回路121は、CPU101からの制御指令に基づき、縦ベルトモータ131の動作を制御する。駆動回路122は、CPU101からの制御指令に基づき、横ベルトモータ132の動作を制御する。駆動回路123は、CPU101からの制御指令に基づき、横昇降ベルトモータ133の動作を制御する。駆動回路124は、CPU101からの制御指令に基づき、横搬送ベルトモータ134の動作を制御する。駆動回路125は、CPU101からの制御指令に基づき、第1昇降モータ135の動作を制御する。駆動回路126は、CPU101からの制御指令に基づき、第2昇降モータ136の動作を制御する。駆動回路127は、CPU101からの制御指令に基づき、搬送モータ137の動作を制御する。駆動回路128は、CPU101からの制御指令に基づき、昇降モータ69の動作を制御する。駆動回路129は、CPU101からの制御指令に基づき、第1位置決めシリンダ70の動作を制御する。駆動回路130は、CPU101からの制御指令に基づき、第2位置決めシリンダ80の動作を制御する。
プラテン搬送機構10を構成する各モータとして、ステッピングモータが用いられてもよい。その場合、各モータにエンコーダを接続し、各エンコーダからモータの位置情報をCPU101に送信することで、CPU101は各モータの位置を認識できる。
図13~図20を参照し、印刷処理を説明する。プラテン搬送機構10は、準備位置100に配置されたプラテン50を、前処理装置2、プリンタ3~8の何れか、及び後処理装置9の順に搬送し、再度準備位置100に返送するが、第1実施形態では、布帛Pを取り付けたプラテン50が、搬送機構15からプラテン支持部材60に受け渡され、プリンタ3内部で印刷後、プラテン支持部材60から搬送機構16へ受け渡されるまでの処理を詳細に説明する。後述する処理は、CPU101が、ROM102に記憶された制御プログラムを読み込んで、実行される。
プラテン50が、搬送機構15の横搬送ベルト15Aによって、プリンタ3のプラテン支持部材60の前方まで搬送されると、図14に示すように、プラテン支持部材60は、前後方向における受け取り位置に配置され、昇降テーブル63は、上下方向における第1位置z1に配置される。初期位置は、プラテン支持部材60がプラテン50を受け取るときの前後方向の位置であって、例えば、一対のレール3Bにおけるプラテン支持部材60の可動範囲の前端位置である。
仮に、昇降テーブル63が第1位置z1の状態で、横搬送ベルト15A上のプラテン50を昇降テーブル63に向けて搬送した場合、プラテン50に対して、昇降テーブル63の位置が低いので、プラテン50の下板54の後端に、昇降テーブル63の右板632と左板633の夫々の前端が衝突する。これらが衝突した場合、プラテン50の右側面板52、左側面板53、下板54、及び上板55によって囲まれる空間内に対し、昇降テーブル63は途中までしか挿入されない。その状態で、第1位置決めシリンダ70及び第2位置決めシリンダ80による位置決めが行われた場合、プラテン50を印刷規定位置Wに位置決めすることができず、布帛Pに対して印刷位置がずれる等の不具合が生じてしまう。
そこで、図15に示すように、CPU101は、昇降テーブル63を、第1位置z1から第2位置z2まで上昇させる(S10)。次いで、CPU101は、横搬送ベルト15Aを駆動し、プラテン50を昇降テーブル63に向けて搬送する(S11)。昇降テーブル63は第2位置z2に在るので、プラテン50の右側面板52、左側面板53、下板54、及び上板55によって囲まれる空間内に対し、昇降テーブル63は先端側から干渉することなく挿入される(図16参照)。この挿入時、布帛Pは垂れ下がり防止板56Aにより、右側面板52、左側面板53、下板54、及び上板55によって囲まれる空間をふさがないので、昇降テーブル63は布帛Pに接触することなく、挿入される。
CPU101は、プラテン50の挿入が完了したか判断する(S12)。プラテン50の挿入完了位置は、例えば、横搬送ベルト15Aの搬送方向下流側の所定位置である。所定位置には、例えばリミッタスイッチが設けられる。横搬送ベルト15Aによって搬送されるプラテン50がリミッタスイッチを押し込んでオンすることで、リミッタスイッチからオン信号がCPU101に送信される。CPU101はオン信号を受信することで、プラテン50の挿入が完了したと判断する。プラテン50の挿入が完了するまでは(S12:NO)、CPU101はS12に戻り、引き続きプラテン50を昇降テーブル63に向けて搬送する。図16に示すように、プラテン50の挿入が完了した場合(S12:YES)、CPU101は、横搬送ベルト15Aの横搬送ベルトモータ134の駆動を停止し、プラテン50の搬送を停止する(S13)。
図17に示すように、昇降テーブル63の上板631の上面にプラテン50を載置して支持させる為、CPU101は、横搬送ベルト15Aを下降する(S14)。プラテン50は、横搬送ベルト15Aと共に下降する。昇降テーブル63の上板631に設けられた3つの凸部634~636に対し、プラテン50の上板55の下面が接触し、重力により載置された状態となって支持される。CPU101は、プラテン50が昇降テーブル63に載置されたか判断する(S15)。昇降テーブル63の上板631の3つの凸部634~636に対し、プラテン50の上板55の下面が接触して支持された場合、昇降テーブル63の上板631に固定された近接センサ90は、プラテン50を検出する。近接センサ90は、検出信号をCPU101に向けて送信する。近接センサ90から検出信号を受信していない場合、プラテン50が昇降テーブル63から離れているので(S15:NO)、CPU101は、横搬送ベルト15Aを下降してからの経過時間がタイムオーバーか判断する(S29)。経過時間がタイムオーバーでない場合(S29:NO)、CPU101はS14に戻り、引き続き横搬送ベルト15Aを下降する。経過時間がタイムオーバーの場合(S29:YES)、CPU101はエラーを出力し(S30)、搬送制御処理を終了する。
近接センサ90から検出信号を受信した場合、プラテン50が横搬送ベルト15Aから離れ、昇降テーブル63に載置されたので(S15:YES)、CPU101は、横搬送ベルト15Aの第2昇降モータ136の駆動を停止し、横搬送ベルト15Aの下降を停止する(S16)。これに限られず、以下の動作が行われてもよい。CPU101は、第2昇降モータ136が所定量回転し、横搬送ベルト15Aを所定量下降させ、横搬送ベルト15Aの下降を停止する。この時、CPU101は近接センサ90から検出信号を受信したかを判断する。CPU101は検出信号を受信したと判断した場合、プラテン50が昇降テーブル63に載置されたと判断する。検出信号を受信していないと判断した場合は、CPU101はエラーを出力する。プラテン50を支持する3つの凸部634~636は、昇降テーブル63の上板631において、平面視三角形の各頂点に配置されているので(図6参照)、凸部634~636は、プラテン50を安定して支持できる。なお、昇降テーブル63の上板631に設ける凸部の数は3つに限らず、これ以上でもよく、凸部の配置についても自由に変更可能である。
なお、仮に昇降テーブル63の上板631の上面から凸部634~636を省略し、プラテン50の上板55の下面を、上板631の上面に直接載置した場合、上板55の下面と上板631の上面とが互いに平行でなければ、上板55の下面が上板631の上面と密着せず、昇降テーブル63に対してプラテン50がガタついてしまい、一定の高さ位置に支持されない。これに対し、第1実施形態は、プラテン50の上板55の下面を、凸部634~636に載せることで、昇降テーブル63の上板631に対して、プラテン50の上板55を一定の高さ位置に安定して支持できる。
CPU101は、プラテン50を、先ずプリンタ3における左右方向と前後方向において、印刷規定位置W(図18参照)に位置決めする為、第1位置決めシリンダ70を作動させる(S17)。印刷規定位置Wに位置決めされたプラテン50は、レール3Bの延びる方向(図1:左右方向、図2、図18:前後方向)に移動し、プリンタ3内部で印刷される。印刷時、前後左右方向にプラテン50の位置が基準の位置からずれると、布帛Pの所望の位置に画像が印刷できない。従って、プラテン50は、プリンタ3の内部での印刷時に、プラテン50の位置が基準の位置に一致していないといけない。プラテン支持部材60はプラテン50を受け取った後、レール3Bの延びる方向に移動するので、図18に示す前後方向においてプラテン50の位置は変わるが、左右方向には変わらない。すなわち、印刷時の基準の位置と印刷規定位置Wは、前後方向においては変わるが、左右方向には変わらない。例えば、プリンタ3が図18に示す左右方向を主走査方向として往復移動するキャリッジを有する場合、左右方向の印刷規定位置Wは、インクジェットヘッドを搭載するキャリッジの移動範囲内になる。また、プリンタ3は、プラテン50を支持したプラテン支持部材60の前後方向の位置を認識して画像を形成する。また上下方向においても、プラテン50は接触しないようにプリンタ3に設けられた画像形成部よりも下方である必要がある。特に画像形成部がインクジェットヘッドである場合、プラテン50とインクジェットヘッドとの距離に応じて着弾距離が変わるので、プラテン50の上下方向の位置が変わると、プリンタ3は所望の画像を形成できない。すなわち、プラテン50の各位置とインクジェットヘッドの距離が所定範囲内に収まるようにプラテン50の水平度は保たれる必要がある。印刷の前に、布帛Pの厚みに応じて、自動又は手動でプラテン50の上下方向の位置が調整されることもあるが、調整される前のプラテン50の位置を定めるのが望ましい。プラテン50と画像形成部との間の距離は、1mm~100mmであるのが望ましい。従って、プラテン支持部材60に対するプラテン50の位置が、プラテン支持部材60への受け渡しごとに前後左右上下方向に変わらないように位置決めする必要がある。このプラテン支持部材60に対するプラテン50の位置を印刷規定位置Wとする。印刷規定位置Wは、例えば、プラテン支持部材60に対する所定位置であり、プリンタ3による印刷時の基準となる位置である。CPU101は、前後方向における受け取り位置に配置されたプラテン支持部材60の昇降テーブル63に対して、プラテン50を前後方向、左右方向及び上下方向に夫々位置決めすることで、プラテン50は印刷規定位置Wに位置決めされる。
ここで、図18、図19に示すように、プラテン50の左側面板53の前方延設部532の前端側には、貫通穴57が設けられる。貫通穴57は左側面視略矩形状であり、左側面板53を左右方向に貫通する。左側面板53における右側面板52と対向する内面において、貫通穴57の周囲には、左方に向けて凹状に形成された凹部57Aが設けられる。凹部57Aの内側には、金属製の接触板58が嵌め込まれ、4本のネジ97で固定される。接触板58の略中央には、挿入穴59が設けられる。挿入穴59は前後方向よりも上下方向に長い長円状であり、上下方向に大径r1、前後方向に小径r2を有する。挿入穴59は、貫通穴57と連通する。挿入穴59の外周には、テーパ部591が設けられる。テーパ部591は、挿入穴59の外周に沿って同一幅を有する長円環状であり、挿入穴59側に向かって左右方向の厚みが薄くなるように傾斜する。
第1位置決めシリンダ70が作動すると、第1位置決めシリンダ70の円筒部73から水平ピン75が、プラテン50の左側面板53の挿入穴59に向けて伸長する(図6参照)。水平ピン75が挿入穴59に向けて伸長するに従い、テーパ部751の先端部は挿入穴59に挿入され、テーパ部751は、挿入穴59のテーパ部591と接触する。上記の通り、水平ピン75のテーパ部751の径Rは、挿入穴59の大径r1よりも小さく、小径r2よりも大きい径Rを有する。よって、テーパ部751は、挿入穴59のテーパ部591のうち前後方向において対向する一対の両縁部592と接触し、上縁部と下縁部には接触しない。テーパ部751をテーパ部591の上縁部と下縁部に接触させないことによって、後述する第2位置決めシリンダ80の作動時において、プラテン50の上下方向の位置決めが可能になる。
水平ピン75が挿入穴59に向けてさらに伸長すると、テーパ部751は、挿入穴59の両縁部592の一方に接触した状態で左方に押圧する。ここで、水平ピン75のテーパ部751、及び挿入穴59のテーパ部591は、何れも左方から右方に向けて上下方向及び前後方向に広がるように傾斜している。よって、仮に水平ピン75の先端に対して、プラテン50側の挿入穴59の中心が前後方向にずれていたとしても、テーパ部751がテーパ部591の両縁部592の一方を左方に押圧することによって、テーパ部591はテーパ部751の斜面に沿って滑り、水平ピン75の先端の前後方向の位置に対して、挿入穴59の中心が一致するように移動する。このとき、水平ピン75の位置を基準にして、プラテン50が前後方向に移動する。
そして、水平ピン75のテーパ部751の前側部分と後側部分の何れも挿入穴59の前側端部と後側端部に接触したとき、プラテン50は、前後方向に移動できないので、昇降テーブル63に対して前後方向に強固に位置決めされる。
また、水平ピン75のテーパ部751は、挿入穴59のテーパ部591を左方に押圧するので、プラテン50は、昇降テーブル63に対して左方に移動する。この結果、プラテン50の右側面板52の内面(左面)が、昇降テーブル63の右板632の外面(右面)と接触する。従って、プラテン50は、前後方向のみならず、左右方向にも移動できないので、昇降テーブル63に対して左右方向に強固に位置決めされる。
上述したように、水平ピン75のテーパ部751が、挿入穴59のテーパ部591に接触して押圧されるので、仮に水平ピン75のテーパ部751の先端部が、前後方向において挿入穴59の中心からずれていても、テーパ部751の斜面に沿ってテーパ部591が摺動する。これにより、水平ピン75は、挿入穴59の中心に向けて案内される。そして、テーパ部751は、挿入穴59の一対の両縁部592に接触した状態で左方に押圧する。従って、プラテン50は、前後方向においても移動できないので、左右方向の位置決めと同時に、前後方向においても昇降テーブル63に対して強固に位置決めされる。
CPU101は、左右方向及び前後方向の位置決めが完了したか判断する(S18)。第1位置決めシリンダ70に設けられた近接センサ79(図10参照)は、水平ピン75が左方に伸び切ったときのピストンを検出し、CPU101に検出信号を送信する。水平ピン75が左方に伸び切ったとき、プラテン50の左右方向及び前後方向の位置決めが完了する。近接センサ79からの検出信号を受信するまでは、プラテン50の左右方向及び前後方向の位置決めが完了していないので(S18:NO)、CPU101はS17に戻り、引き続き、水平ピン75が左方に伸長する。近接センサ79から検出信号を受信した場合、プラテン50の左右方向及び前後方向の位置決めが完了したので(S18:YES)、続いて、CPU101は、第2位置決めシリンダ80を作動させる(S19)。
図11に示すように、第2位置決めシリンダ80が作動すると、第2位置決めシリンダ80の本体部82の左面の中央からシリンダロッド83が、前方に向けて伸長する。シリンダロッド83が前方に伸長することに伴い、U字部831の支軸832は、ピン84の基部841を前方に押し込む。すると、基部841は、支軸86を中心に右側面視反時計回りに回動するので、ピン84の先端部85も、支軸86を中心に下方に向かって回動する。そして、図20に示すように、ピン84の先端部85のR部851は、プラテン50の下板54の上面に接触する。このとき、下板54の上面をピン84は押圧している状態である。
プラテン50の上板55の下面は、昇降テーブル63の上板631の凸部634~636に既に当接している。よって、下板54がピン84の先端部85によって下方に押圧されることで、プラテン50は、昇降テーブル63に対して、上下方向のずれを補正するように下方に移動する。そして、プラテン50の上板55は、昇降テーブル63の凸部634~636に対して上方から押し付けられた状態となる。これにより、プラテン50は、上下方向において、昇降テーブル63に対して強固に位置決めされる。そして、昇降テーブル63に対して、プラテン50が左右方向、前後方向、及び上下方向に夫々位置決めされたので、プラテン50は、プリンタ3の印刷規定位置Wに精度よく位置決めされる。
CPU101は、上下方向の位置決めが完了したか判断する(S20)。第2位置決めシリンダ80に設けられた近接センサ89(図11参照)は、シリンダロッド83が前方に伸び切ったときのピストンを検出し、CPU101に検出信号を送信する。シリンダロッド83が前方に伸び切ったとき、プラテン50の上下方向の位置決めが完了する。近接センサ89からの検出信号を受信するまでは、上下方向の位置決めが完了していないので(S20:NO)、CPU101はS19に戻り、引き続き、シリンダロッド83を前方に伸長させ、ピン84の先端部85を下方に揺動させる。
近接センサ89から検出信号を受信した場合、上下方向の位置決めが完了したので(S20:YES)、CPU101は、操作部110において作業者が入力したプラテン50の高さ位置に合わせ、昇降テーブル63を第2位置z2から下降させ、プラテン50の位置を下げる(S21)。布帛Pの厚みによっては、プラテン50の位置を下げる必要がある。作業者は、操作部110を用いて、布帛Pの厚みに応じてプラテン50の高さ位置を入力すればよい。これで印刷準備が完了したので、CPU101は、プリンタ3によって前処理済みの布帛Pに対して印刷ヘッドによる印刷を行う(S22)。
なお、プラテン50に取り付けられた布帛Pの厚みにはバラつきがあり、しわ等はその一例である。プリンタ3の内部に固定された異物検出センサ93(図12参照)は、プラテン50から所定の高さ位置よりも上方において、布帛Pを検出した場合、CPU101は、布帛Pにしわがあると判断する。その場合、CPU101は例えば、エラーを出力し、印刷処理を一時的に中止し、操作部110において作業者にその旨を報知してもよい。なお、異物検出センサ93は、例えば赤外線センサ等の光学センサを用いることができる。赤外線センサは、赤外線を出力する発光部と、発光部が出力した赤外線を受光する受光部を備える。例えば、発光部と受光部をプラテン50上から一定の高さ位置に配置し、発光部と受光部の間に布帛Pのしわが配置された場合、発光部が出力した赤外線は遮断される。よって、CPU101は、受光部における赤外線の受光量に基づき、布帛Pにおいてしわの有無を判断できる。
印刷が終了すると、CPU101は、プラテン支持部材60を、一対のレール3Bに沿って受渡位置まで搬送する(S23)。受渡位置においては、一対のレール3Bの左右両側に、一対の横搬送ベルト16Aが配置される(図1参照)。よって、昇降テーブル63に位置決めされたプラテン50の台座51の下面の左右両側に、一対の横搬送ベルト16Aが配置される。CPU101は、昇降テーブル63を第2位置z2まで上昇させる(S24)。CPU101は、第2位置決めシリンダ80のシリンダロッド83を後方に移動させ、ピン84の先端部85をプラテン50の下板54から離れさせることで、プラテン50の上下方向の位置決めを解除する(S25)。次いで、CPU101は、第1位置決めシリンダ70の水平ピン75を右方に移動させ、プラテン50の左側面板53の挿入穴59から引き抜くことで、プラテン50の左右方向及び前後方向の位置決めを解除する(S26)。プラテン50は、再び昇降テーブル63上に載置して支持された状態となる。
CPU101は、一対の横搬送ベルト16Aを上昇する(S27)。一対の横搬送ベルト16Aの夫々の上面に、プラテン50の台座51の下面が載る。横搬送ベルト16Aがさらに上昇することによって、昇降テーブル63の上板631の凸部634~636から、プラテン50の上板55が離れ、プラテン50が持ち上がる。CPU101は、プラテン50が昇降テーブル63から離れたか判断する(S28)。昇降テーブル63に固定された近接センサ90が、プラテン50を引き続き検出する場合、プラテン50は昇降テーブル63から離れていないので(S28:NO)、CPU101は、横搬送ベルト16Aを上昇してからの経過時間がタイムオーバーか判断する(S31)。
経過時間がタイムオーバーしていない場合(S31:NO)、CPU101はS27に戻り、引き続き横搬送ベルト16Aを上昇する。経過時間がタイムオーバーの場合(S31:YES)、CPU101はエラーを出力し(S32)、搬送制御処理を終了する。
近接センサ90が、プラテン50を検出しなくなった場合、プラテン50は昇降テーブル63から離れたので(S28:YES)、CPU101は本処理を終了する。プラテン50は、横搬送ベルト16Aに受け渡された状態となる。プラテン50が、横搬送ベルト16Aへ受け渡される時、図示しない前後回転装置により、プラテン50を支持した状態のプラテン支持部材60が前後回転してもよい。この前後回転により、プラテン50は、横搬送ベルト16Aに受け渡すことができる。これに限らず、プラテン支持部材60はプリンタ3での印刷後、一対のレール3Bに沿って左方に搬送されるが、途中で、プラテン50を横搬送ベルト16Aに載置してもよい。プラテン50が載置されると、CPU101は、横搬送ベルト16Aをプラテン支持部材60よりも上方に移動させ、さらに横搬送ベルト16Aを左方に回転させる。これにより、プラテン50は、プラテン支持部材60から横搬送ベルト16Aに受け渡される。
以上説明したように、第1実施形態の印刷システム1は、搬送機構14、15、印刷搬送機構41、及び第1位置決めシリンダ70を備える。搬送機構14は、プラテン50を前処理装置2に搬送する。印刷搬送機構41は、プラテン支持部材60を備える。プラテン支持部材60は、搬送機構15によって搬送されたプラテン50を支持する。印刷搬送機構41は、プラテン支持部材60をプリンタ3に搬送する。第1位置決めシリンダ70が、プラテン50を、プリンタ3における左右方向及び前後方向において印刷規定位置Wに位置決めする。よって、印刷システム1は、プリンタ3に対してプラテン50が搬送されない可能性を低減できる。これにより、プラテン50は印刷規定位置Wに位置決めされた状態で印刷搬送機構41によってプリンタ3へ搬送される。よって、プリンタ3は、プラテン50上の布帛Pの目標位置に位置ずれなく印刷できる。
プラテン支持部材60は昇降テーブル63により、昇降可能である。例えば、一対のレール67が上下方向に延び、昇降テーブル63をガイドする。ボールネジ68が一対のレール67と平行に設けられ、昇降モータ69と連結する。ナット681が、ボールネジ68に螺合し、且つプラテン支持部材60に固定される。これにより、昇降モータ69がボールネジ68を回転させることで、昇降テーブル63が一対のレール67に沿って上下方向に移動する。昇降テーブル63の上下方向の移動に伴ってプラテン支持部材60が昇降する。この為、印刷搬送機構41において、搬送機構15から搬送されるプラテン50をプラテン支持部材60が支持するとき、プラテン支持部材60はプラテン50と干渉しないように昇降できる。従って、印刷システム1は、プリンタ3に対してプラテン50が搬送されない可能性をさらに低減できる。また、プラテン支持部材60は、昇降テーブル63、又は図示しない高さ調節機構により、印刷時におけるプラテン50の高さを調節できる。
印刷システム1は、近接センサ90を備える。近接センサ90は、プラテン50をプラテン支持部材60が支持したことを検出する。第1位置決めシリンダ70は、プラテン支持部材60がプラテン50を支持したことを近接センサ90によって検出された場合、プラテン50を印刷規定位置Wに位置決めする。例えば、プラテン支持部材60は水平ピン75を備える。水平ピン75は、移動することでプラテン50に接触可能である。プラテン支持部材60がプラテン50を支持したことを近接センサ90によって検出された場合、第1位置決めシリンダ70は、円筒部73から水平ピン75をプラテン50に向けて伸長する。水平ピン75がプラテン50と接触することで、プラテン50が印刷規定位置Wに位置決めされる。これにより、印刷システム1は、プラテン支持部材60がプラテン50を支持せずに、第1位置決めシリンダ70が位置決めする誤動作を低減できる。従って、印刷システム1は、プリンタ3に対してプラテン50が搬送されない可能性をさらに低減できる。
近接センサ90は、プラテン支持部材60に設けられ、プラテン支持部材60の外形よりも内側に配置される。これにより、印刷システム1は、例えば、プラテン50の外形に沿って布帛Pが取り付けられてプラテン50が布帛Pを支持した状態において、布帛Pがプラテン支持部材60に設けられた近接センサ90に引っ掛かるのを防止できる。この為、印刷システム1は例えばプラテン50から布帛Pを取り外す際に、布帛Pが近接センサ90に引っ掛かって布帛Pが破れたり、近接センサ90が布帛Pに引っ張られて脱落するのを防止できる。また、布帛Pが近接センサ90に引っ掛からないので、印刷システム1は近接センサ90の動作に影響が出るのを防止できる。
印刷システム1は、搬送機構14、15にてプラテン50が搬送された後、近接センサ90がプラテン支持部材60によるプラテン50の支持を検出しない場合、エラーを出力する。これにより、印刷システム1は、プラテン支持部材60がプラテン50を支持しない状態でプリンタ3まで搬送されたことを、エラーを出力によって認識できる。
印刷システム1は、第1位置決めシリンダ70と第2位置決めシリンダ80を備える。第1位置決めシリンダ70は、プラテン50を左右方向と前後方向において印刷規定位置Wに位置決めする。第2位置決めシリンダ80は、プラテン50を上下方向において印刷規定位置Wに位置決めする。プラテン50は、プラテン支持部材60に支持された状態で、重力により上下方向の位置がおおよそ決まる。この性質を利用し、印刷システム1は、プラテン50を先に左右方向と前後方向において印刷規定位置Wに位置決めした後で、上下方向において印刷規定位置Wに位置決めする。これにより、印刷システム1はプラテン50を水平方向において印刷規定位置Wに位置決めした後、上下方向の位置がほぼ決まったプラテン50を、上下方向において印刷規定位置Wに容易且つ速やかに位置決めできる。また、印刷システム1はプラテン50を水平方向において印刷規定位置Wに位置決めできることに加え、上下方向においても印刷規定位置Wに位置決めできる。この為、印刷システム1はプラテン50の搬送中に、プラテン50に取り付けられた布帛Pを一定の高さ位置に支持できる。これにより、印刷システム1は、プリンタ3による印刷の位置ずれを防止できる。
搬送機構14は縦ベルト14Aによってプラテン50を搬送する。搬送機構15は横搬送ベルト15Aによってプラテン50を搬送する。印刷搬送機構41は、一対のレール3Bによってプラテン支持部材60を搬送する。搬送機構14は、プラテン50を前処理装置2に搬送することが目的なので、相対的に位置決め精度の低い縦ベルト14Aを用いることで、設備コストを低減できる。搬送機構15も、プラテン50を搬送する目的なので、相対的に位置決め精度の低い横搬送ベルト15Aを用いることで、設備コストを低減できる。一方、印刷搬送機構41は、プラテン支持部材60をプリンタ3に搬送し、プラテン支持部材60に支持されたプラテン50を印刷規定位置Wに位置決めする必要があるので、相対的に位置決め精度の高い一対のレール3Bを用いる。これにより、印刷システム1は、プリンタ3での印刷において印刷位置がずれるのを防止できる。
印刷搬送機構41のプラテン支持部材60は、一対のレール67、ボールネジ68、ナット681、及び昇降モータ69を備える。一対のレール67は、昇降テーブル63を上下方向にガイドする。ボールネジ68は、一対のレール67と平行に設けられる。ナット681は、ボールネジ68に螺合し、プラテン支持部材60に固定される。昇降モータ69は、ボールネジ68を回転させる。これにより、印刷システム1は、プラテン支持部材60に支持されたプラテン50の上下方向の高さ位置を精度よく調節できる。
第1位置決めシリンダ70及び第2位置決めシリンダ80は、プラテン支持部材60の外形よりも内側に配置される。これにより、印刷システム1は、例えば、プラテン50の外形に沿って布帛Pが取り付けられてプラテン50が布帛Pを支持した状態において、布帛Pがプラテン支持部材60に設けられた第1位置決めシリンダ70及び第2位置決めシリンダ80に引っ掛かるのを防止できる。この為、印刷システム1は例えばプラテン50から布帛Pを取り外す際に、布帛Pが第1位置決めシリンダ70及び第2位置決めシリンダ80に引っ掛かって布帛Pが破れたり、第1位置決めシリンダ70及び第2位置決めシリンダ80が布帛Pに引っ張られて脱落するのを防止できる。また、布帛Pが第1位置決めシリンダ70及び第2位置決めシリンダ80に引っ掛からないので、印刷システム1は第1位置決めシリンダ70及び第2位置決めシリンダ80の動作に影響が出るのを防止できる。
第1実施形態において、印刷システム1は本発明のプラテン搬送装置の一例である。搬送機構14、15、17、19は本発明の第1搬送路の一例である。プラテン支持部材60は本発明のプラテン支持部材の一例である。印刷搬送機構41、42、43は本発明の第2搬送路の一例である。第1位置決めシリンダ70は本発明の位置決め部及び第1位置決め部の一例である。第2位置決めシリンダ80は本発明の第2位置決め部の一例である。図13のS30の処理を実行するCPU101は本発明のエラー出力部の一例である。縦ベルト14A、横搬送ベルト15Aは本発明のベルトの一例である。レール3Bは本発明のレールの一例である。昇降モータ69は本発明のモータの一例である。近接センサ90が本発明の検出部の一例である。
本発明は第1実施形態に限定されることなく、種々の変更が可能である。以下説明する各種変形例は、矛盾が生じない限り夫々組み合わせ可能である。例えば本発明は第1実施形態のようなインクジェットタイプとは異なるタイプのプリンタにも適用できる。第1実施形態の印刷システム1は、プラテン50を、第1位置決めシリンダ70で左右方向及び前後方向に位置決めし、第2位置決めシリンダ80で上下方向に位置決めするが、第1実施形態以外の方法で位置決めしてもよい。そこで、プラテン50の位置決め方法を変更した3つの変形例を以下に説明する。
図21、図22を参照し、第1変形例を説明する。図21に示すプラテン支持部材160は、第1実施形態のプラテン支持部材60の一部を変形したものである。なお、図21、図22において、第1実施形態のプラテン支持部材60と共通する部分については、同一符号を付している。プラテン支持部材160の昇降テーブル163の上板631の上面には、3つのピン651~653が設けられる。ピン651~653は、第1実施形態の凸部634~636(図6参照)と同一位置に設けられる。ピン651~653は、上方に突出する略円柱状である。ピン651~653の各先端部は、上方に向かって径が小さくなるテーパ状に形成される。一方、図22に示すように、プラテン150の上板55には、3つの嵌合穴551(図22では2つのみ図示)が設けられる。3つの嵌合穴551は、3つのピン651~653に夫々対応する位置に設けられ、上板55の下面からスペーサ55Aまで上方に貫通する。
図13の印刷処理のS14の処理において、CPU101は、横搬送ベルト15Aを下降する際に、昇降テーブル163側の3つのピン651~653を、プラテン150側の3つの嵌合穴551に夫々嵌合させる。これにより、第1変形例は、第1位置決めシリンダ70を用いなくても、プラテン150を、左右方向及び前後方向において位置決めできる。第1変形例においては、3つのピン651~653が本発明の位置決め部及び第1位置決め部の一例である。
図23を参照し、第2変形例を説明する。第2変形例は、第1位置決めシリンダ70のみで、プラテン50を、左右方向、前後方向、及び上下方向において位置決めする。第2変形例において、第1位置決めシリンダ70の位置は、第1実施形態の位置よりもやや下方に位置する。
第1位置決めシリンダ70の水平ピン75が左方に伸びたとき、水平ピン75のテーパ部751は、挿入穴59のテーパ部591の一対の両縁部592と接触し、左方に押圧する。そして、第1実施形態と同様に、水平ピン75のテーパ部751、及び挿入穴59のテーパ部591は、何れも左方から右方に向けて上下方向及び前後方向に広がるように傾斜している。これにより、テーパ部591はテーパ部751の斜面に沿って滑り、水平ピン75の先端の前後方向の位置に対して、挿入穴59の中心が一致するように移動する。これと同時に、水平ピン75のテーパ部591は、一対の両縁部592を左方に押圧する。水平ピン75のテーパ部591の前側部分、後側部分、及び下側部分の何れも、挿入穴59の前側端部、後側端部、及び下側端部に接触したとき、プラテン50は前後方向、左右方向、及び上下方向の何れにも移動できない。従って、プラテン50は、昇降テーブル63に対して、前後方向、左右方向、及び上下方向に強固に位置決めされる。これにより、第2変形例は、第2位置決めシリンダ80を用いなくても、第1位置決めシリンダ70のみで、プラテン50を、前後方向、左右方向、及び上下方向において位置決めできる。第2変形例においては、第1位置決めシリンダ70が本発明の位置決め部の一例である。
なお、第2変形例では、水平ピン75のテーパ部751が、一対の両縁部592及び下縁部593に接触して押圧するが、例えば、一対の両縁部592及び上縁部に接触して押圧することにより、プラテン50を、左右方向、前後方向、及び上下方向において位置決めしてもよい。
図24を参照し、第3変形例を説明する。第3変形例は、第2位置決めシリンダ80のみで、プラテン50を、左右方向、前後方向、及び上下方向において位置決めする。第3変形例のプラテン50の下板54の上面には、平面視円形状の嵌合穴542が設けられ、その外周に沿って、テーパ部541が設けられる。テーパ部541の径は、嵌合穴542に向かって小さくなる。嵌合穴542の径は、第2位置決めシリンダ80のピン84の径よりも小さい。
第2位置決めシリンダ80のピン84が下方に揺動すると、先端部85のR部851が、下板54の上面のテーパ部541に接触する。先端部85のR部851、及び嵌合穴542のテーパ部541は何れも上方に向かって拡径しているので、ピン84がさらに下方に揺動すると、先端部85のR部851の斜面に沿って、下板54の上面のテーパ部541が滑り、先端部85の位置に合わせ、嵌合穴542が前後方向及び左右方向に移動する。そして、先端部85が嵌合穴542に嵌ることにより、プラテン50の左右方向及び前後方向の位置が決まる。
そして、ピン84が嵌合穴542に嵌った状態で、下板54を下方に押圧することで、プラテン50の上下方向の位置が決まる。これにより、第3変形例は、第1位置決めシリンダ70を用いなくても、第2位置決めシリンダ80のみで、プラテン50を、左右方向、前後方向、及び上下方向において位置決めできる。第3変形例においては、第2位置決めシリンダ80が本発明の位置決め部の一例である。
本発明は上記3つの変形例の他にも、種々の変更が可能である。図1に示す印刷システム1のプラテン50の搬送経路は、図1に示す経路に限定されず、例えば、第1返送ライン204、第2返送ライン205を省略してもよい。プリンタの数も自由に変更可能であり、前処理装置2及び後処理装置9の一方、又は両方を省略してもよい。また、第1実施形態において、印刷搬送機構41~43はレールで構成し、それ以外の搬送機構はベルトで構成するが、ベルト以外の搬送手段(例えば、ローラ等)を用いてもよい。プラテン50は、布帛用以外に、帽子用、靴用等でもよい。発送ライン201、左側処理ライン202、右側処理ライン203、第1返送ライン204、第2返送ライン205は全て直線状であるが、曲がっていてもよい。
昇降テーブル63の上板631には、プラテン50を検出する為の近接センサ90が固定されるが、近接センサ90の代わりに、例えば、レバースイッチを設けてもよい。この場合、昇降テーブル63上にプラテン50が載置されたときに、レバースイッチがプラテン50に押されてオンされる。それ故、CPU101は、昇降テーブル63上にプラテン50が載置されたことを検出できる。
図13に示す印刷処理は、印刷システム1を制御するCPU101が実行するが、各装置のCPUが実行してもよい。図13に示す印刷処理において、S14では、CPU101は、横搬送ベルト15Aを下降させて、プラテン50をプラテン支持部材60に支持させる。これに対し、CPU101は昇降テーブル63を上昇させて、プラテン50をプラテン支持部材60に支持させてもよい。なお、後述の第2実施形態も同様に変更できる。
図13に示す印刷処理においては、第1位置決めシリンダ70が作動して左右方向及び前後方向の位置決めが終わった後で、第2位置決めシリンダ80が作動して上下方向の位置決めがなされるが、例えば、CPU101は第2位置決めシリンダ80を先に作動させ、上下方向の位置決めが終わった後で、第1位置決めシリンダ70を作動させてもよい。また、CPU101は第1位置決めシリンダ70と第2位置決めシリンダ80を同時に作動させ、左右方向、前後方向、及び上下方向においてプラテン50を同時に位置決めしてもよい。
図13のS30、S32において、CPU101はエラーを出力する際に、例えば、操作部110のタッチパネルにエラー内容を示す情報を表示してもよく、音声でエラーを報知するようにしてもよい。
第1実施形態では、コードリーダー95によって読み取られる識別情報部(図示略)は布帛Pに設けられるが、例えばプラテン50に設けられてもよい。
第1実施形態では、プラテン50が横搬送ベルト15Aからプリンタ3に搬送され、印刷終了後に、横搬送ベルト16Aに受け渡されて搬送されるが、印刷終了後に、横搬送ベルト15Aに戻されてもよい。プラテン支持部材60は、プリンタ3の内部に移動し、印刷時にプラテン50を支持するので、上下左右前後方向の位置がずれないほうが望ましい。従って、プラテン50が横搬送ベルト15Aからプラテン支持部材60に受け渡されるとき、及びプラテン支持部材60から横搬送ベルト16Aに受け渡されるとき、プラテン支持部材60が上下動するよりも、横搬送ベルト15A、及び横搬送ベルト16Aが上下動する方が望ましい。しかし、横搬送ベルト15A、及び横搬送ベルト16Aが上下動せずに、プラテン支持部材60が上下動してもよい。
第1実施形態では、第1位置決めシリンダ70、第2位置決めシリンダ80、及び近接センサ90がプラテン支持部材60の外形よりも内側に配置された。この配置状態の一例を説明する。図16に示すプラテン50の内側に昇降テーブル63が挿入された状態において、第1位置決めシリンダ70、第2位置決めシリンダ80、及び近接センサ90は、上下方向において、プラテン50の取付板56よりも下方、且つ前方延設部522、532(前方延設部522は、図4参照)の下端よりも上方に位置すればよい。第1位置決めシリンダ70、第2位置決めシリンダ80、及び近接センサ90は、左右方向において、取付板56の左端と右端との間に位置すればよい。第1位置決めシリンダ70、第2位置決めシリンダ80、及び近接センサ90は、前後方向において、取付板56の前端よりも後方、且つプラテン50の後端よりも前方に位置すればよい。この位置関係であれば、布帛PとしてTシャツなどの上着が、その腹面が取付板56の上面側、背面が取付板56の下面側になるように取付板56に取り付けられたとき、第1位置決めシリンダ70、第2位置決めシリンダ80、及び近接センサ90は布帛Pと干渉しない。なお、水平方向の位置決め機構、及び上下方向の位置決め機構は、第1実施形態に限られず、例えば、プラテン50の外側に設けられ、プラテン50の外側からプラテン50に接触して位置決めが行われてもよい。
第1実施形態では、第2位置決めシリンダ80(図11、図20参照)が作動すると、シリンダロッド83が前方に伸長することに伴い、ピン84の先端部85が下方に向かって回動し、プラテン50の下板54の上面を押圧する。このとき、例えば、シリンダロッド83を前方にさらに伸長させることにより、ピン84の先端部85のR部851が、プラテン50の下板54の上面を下方にさらに押圧してもよい。この場合、本体部82の前側が本体支軸818を中心に上方に揺動すると共に、下板54の上面に対して、R部851が摺動しながらピン84が徐々に起き上がる。これにより、シリンダロッド83が前方に伸長するにつれて、ピン84の先端部85は、下板54の上面を下方にさらに押圧する。
以下、図25~図33を参照し、第2実施形態について説明する。以下の説明では、第2実施形態において、第1実施形態と同等形状を有する部材については第1実施形態の部材と同一符号を付して説明を省略又は簡略化する。
第2実施形態では、プリンタ3、搬送機構14、15、17、19、印刷搬送機構41、42、43については第1実施形態と同一の装置、機構(図1参照)が採用される。第2実施形態では、図6に示す第1実施形態のプラテン支持部材60に代えて図25に示すプラテン支持部材60Aが採用され、図3に示す第1実施形態のプラテン50に代えて図27に示すプラテン50Aが採用されている点が異なる。
図25、図26を参照し、プラテン支持部材60Aの詳細構造を説明する。図25に示すように、プラテン支持部材60Aは基台61A、立柱62A、昇降テーブル63A等を備える。基台61A、立柱62Aは、図6に示す第1実施形態の基台61、立柱62に対応するので、説明を省略する。昇降テーブル63Aは図6に示す第1実施形態の昇降テーブル63に対応し、上板631A、右板632A、及び左板633Aを備える。上板631Aは平面視矩形状である。右板632Aは上板631Aの右端から下方に延びる。左板633Aは上板631Aの左端から下方に延びる。
上板631Aのうち左右方向の中央且つ前後方向の中央よりも前側には穴637Aが設けられる。穴637Aは上板631Aを上下方向に貫通する。穴637Aの前後方向の長さは、後述の後ローラ82Aの前後方向の移動範囲よりも大きい。上板631Aの左前角部と右前角部には夫々凸部634A、635Aが設けられる。上板631Aのうち穴637Aの後側には凸部636Aが設けられる。凸部634A、635A、636Aは上板631Aの上面から上方に突出する。第2実施形態において近接センサ90は凸部636Aの後側に設けられる。すなわち、近接センサ90は平面視で上板631Aの外形よりも内側に配置される。
穴637Aの前端側には板638Aが設けられる。板638Aは上板631Aから上方に延びる。板638Aには穴639Aが設けられる。穴639Aは板638Aを左右方向に貫通する。穴639Aには図33に示す後述の回転規制部材91Aが挿入される。
プラテン支持部材60Aには図28に示すプラテン50Aを印刷規定位置Wに位置決めする為の位置決め部70Aが設けられる。位置決め部70Aは前ローラ71Aと後ローラ72Aと位置決めシリンダ73Aを備える。前ローラ71Aは穴637Aよりも前方に設けられ、上板631Aの上面から上方に突出する。前ローラ71Aは円柱状であり、上板631Aによって回転可能に支持される。前ローラ71Aの回転中心は上下方向に延びる。後ローラ72Aは平面視で穴637A内に設けられ、上板631Aの上面よりも上方に突出する。後ローラ72Aは円柱状であり、後述のローラ支持部737Aによって回転可能に支持される。後ローラ72Aの回転中心は上下方向に延びる。位置決め部70Aを構成する各部材、すなわち前ローラ71A、後ローラ72A、位置決めシリンダ73Aは何れも平面視で上板631Aの外形よりも内側に配置される。
図26に示すように、位置決めシリンダ73Aは上板631Aの下側に設けられ、本体部731Aとシリンダロッド732Aとを備える。本体部731Aは上板631Aの下面のうち穴637Aよりも後側に固定される。シリンダロッド732Aは本体部731Aから前方に向けて伸長し、位置決めシリンダ73Aの駆動により本体部731Aに対して前後方向に出退する。
シリンダロッド732Aの前端には板736Aが固定される。板736Aは左右方向に延びる。板736Aの左右方向の中央にはローラ支持部737Aが設けられる。図25に示すように、ローラ支持部737Aは板736Aから上方に、穴637Aを介して上板631Aの上方まで延びる。ローラ支持部737Aは後ローラ72Aを回転可能に支持する。
上記構成によれば、位置決めシリンダ73Aの駆動によってシリンダロッド732Aが本体部731Aに対して出退することで、板736Aが前後方向に移動する。これにより、後ローラ72Aはプラテン支持部材60Aに対して前後方向に移動する。シリンダロッド732Aが本体部731Aに対して退避した場合、ローラ支持部737Aが穴637Aの後端に配置される。このとき、後ローラ72Aは後ローラ72Aの可動範囲の後端に位置する。
図27、図28を参照し、プラテン50Aの詳細構造を説明する。図27に示すように、プラテン50Aは台座151A、右側面板152A、左側面板153A、下板154A、上板155A、取付板156A等を備える。台座151A、右側面板152A、左側面板153A、下板154A、上板155A、取付板156Aは、図3に示す第1実施形態の台座51、右側面板52、左側面板53、下板54、上板55、取付板56に対応するので、説明を省略する。
上板155Aの下面にはブロック500Aが設けられる。ブロック500Aは直方体状であり、上板155Aの中央部に固定される。図28に示すように、ブロック500Aの下面には溝501Aが設けられる。溝501Aはブロック500Aの左右方向の中央において前後方向に延びる。以下、ブロック500Aのうち溝501Aよりも左側の部位を「左ブロック510A」といい、ブロック500Aのうち溝501Aよりも右側の部位を「右ブロック520A」という。
左ブロック510Aと右ブロック520Aは互いに左右方向に並び、前後方向に延びる。左ブロック510A、右ブロック520Aの夫々の前後方向の中央部には穴511A、521Aが設けられる。穴511Aは左ブロック510Aの左面から溝501Aまで左右方向に延びる。穴521Aは右ブロック520Aの右面から溝501Aまで左右方向に延びる。穴511A、521Aは左右方向に一直線上に並ぶ。穴511A、521Aには図33に示す後述の回転規制部材91Aが挿入される。
左ブロック510Aと右ブロック520Aの後端部には後係合部560Aが設けられる。後係合部560Aは斜面561A、562Aによって構成される。斜面561Aは左ブロック510Aの後右角部に形成され、底面視で前方から後方に向かうにつれて左方に延びる。斜面562Aは右ブロック520Aの後左角部に形成され、底面視で前方から後方に向かうにつれて右方に延びる。従って、水平面で後係合部560Aを切った断面形状は、前方から後方に向かうにつれて、すなわち後係合部560Aから後ローラ72Aに向かうにつれて、左右方向の両方に広がりながら開口する(図31、図33参照)。
斜面561Aは背面視で下方から上方に向かうにつれて左方に延びる。斜面562Aは背面視で下方から上方に向かうにつれて右方に延びる。斜面561Aは側面視で下方から上方に向かうにつれて前方に延びる(図30、図32参照)。同様に、斜面562Aは側面視で下方から上方に向かうにつれて前方に延びる。従って、上下左右に延びる平面で後係合部560Aを切った断面形状は、下方から上方に向かうにつれて左右方向の両方に広がりながら開口する。
左ブロック510Aと右ブロック520Aの前端部には前係合部550Aが設けられる。左ブロック510A、右ブロック520Aが何れも上板155Aに固定されているので、後係合部560Aに対する前係合部550Aの前後方向の位置は固定される。
前係合部550Aは斜面551A、552Aによって構成される。斜面551Aは左ブロック510Aの前右角部に形成され、底面視で後方から前方に向かうにつれて左方に延びる。斜面552Aは右ブロック520Aの前左角部に形成され、底面視で後方から前方に向かうにつれて右方に延びる。従って、水平面で前係合部550Aを切った断面形状は、後方から前方に向かうにつれて、すなわち前係合部550Aから前ローラ71Aに向かうにつれて、左右方向の両方に広がりながら開口する(図31、図33参照)。
斜面551Aは正面視で下方から上方に向かうにつれて左方に延びる。斜面552Aは正面視で下方から上方に向かうにつれて右方に延びる。斜面551Aは側面視で下方から上方に向かうにつれて後方に延びる(図30、図32参照)。同様に、斜面552Aは側面視で下方から上方に向かうにつれて後方に延びる。従って、上下左右に延びる平面で前係合部550Aを切った断面形状は、下方から上方に向かうにつれて左右方向の両方に広がりながら開口する。
第2実施形態の印刷システム1の電気的構成を説明する。第2実施形態の印刷システム1の電気的構成については、以下の点を除き、第1実施形態の印刷システム1の電気的構成(図12参照)と同一である。第2実施形態では、搬送モータ137にエンコーダ(図示略)が設けられる点が第1実施形態と異なる。エンコーダは搬送モータ137の回転角度を検出し、検出結果をCPU101に出力する。
図13、図29~図33を参照し、第2実施形態の印刷処理を説明すると共に、プラテン支持部材60Aへのプラテン50Aの受け渡しから、印刷規定位置Wへのプラテン50Aの位置決めまでの一連の流れを説明する。図29、図30、図32は、プラテン50Aが印刷規定位置Wに位置決めされる場合の各状態を、プラテン50A及びプラテン支持部材60Aの夫々の左右方向の中心を通る平面で切って右方から見た断面図である。以下では、第2実施形態の印刷処理のうち図13に示す第1実施形態の印刷処理と同じ処理については、説明を省略又は簡略化する。
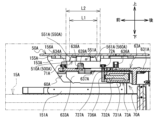
図13に示すように、第2実施形態の印刷処理では、CPU101は第1実施形態と同様に、S10~S13の処理を行う。図29に示すように、図13に示すS13の処理でプラテン50Aの搬送が停止された状態では、プラテン50Aはプラテン支持部材60Aから離れた状態にある。この状態では、後ローラ72Aと前ローラ71Aとの間の前後方向の距離L2が後係合部560Aと前係合部550Aとの間の前後方向の距離L1よりも大きい。距離L1と距離L2とは、後ローラ72Aと前ローラ71Aとの前後方向の間に後係合部560Aと前係合部550Aとが配置可能な距離関係であればよい。例えば、距離L1は後係合部560Aの下端における前端と前係合部550Aの下端における後端との間の距離である。距離L2は後ローラ72Aの前端と前ローラ71Aの後端との間の前後方向の距離である。従って、前係合部550Aが前ローラ71Aの上方において前ローラ71Aよりも前方に位置し、且つ後係合部560Aが後ローラ72Aの上方において後ローラ72Aよりも後方に位置する。この為、印刷システム1は、プラテン50Aがプラテン支持部材60Aに受け渡される場合に、前係合部550Aと後係合部560Aが前ローラ71Aと後ローラ72Aに対して上方から干渉することを抑制できる。
CPU101によって図13に示すS14の処理が行われると、プラテン50Aがプラテン支持部材60Aに受け渡される。プラテン支持部材60Aへのプラテン50Aの受け渡しの最中に、仮にプラテン支持部材60Aが図6に示す一対のレール3Bに沿って前後方向に移動すると、前係合部550A又は後係合部560Aが前ローラ71A又は後ローラ72Aに対して上方から干渉し、プラテン支持部材60Aへのプラテン50Aの受け渡しが適切に行われない可能性がある。
第2実施形態では、上述したように搬送モータ137にエンコーダ(図示略)が設けられる。図13に示すS13の処理において、CPU101は、エンコーダからの検出結果に基づいて搬送モータ137を制御し、プラテン支持部材60Aが図1に示す印刷搬送機構41によって前後方向に搬送されることを規制する。この為、プラテン支持部材60Aへのプラテン50Aの受け渡しの最中に、前後方向への力がプラテン支持部材60Aに作用してもプラテン支持部材60Aが図6に示す一対のレール3Bに沿って前後方向に移動しない。よって、第2実施形態ではプラテン支持部材60Aに対するプラテン50Aの受け渡しが適切に行われる。
図30、図31に示すように、図13に示すS14の処理によって横搬送ベルト15Aの下降と共にプラテン50Aが下降すると、凸部634A、635A、636Aの夫々の上端が上板155Aの下面に接触する。これにより、プラテン50Aがプラテン支持部材60Aによって支持される。すなわち、凸部634A、635A、636Aの夫々の上端の上下方向の位置はプラテン支持部材60Aに対するプラテン50Aの上下方向における基準の位置となる。なお、ブロック500Aの下端は上板631Aの上面から上方へ離れた位置にある。
図13に示すように、CPU101は近接センサ90から検出信号に基づいて、プラテン50Aが昇降テーブル63に載置されたか判断する(S15)。プラテン50Aが昇降テーブル63に載置されていない場合(S15:NO)、CPU101はS29、S30の処理を行う。
プラテン50Aが昇降テーブル63に載置された場合(S15:YES)、CPU101は第2昇降モータ136の駆動を停止し、横搬送ベルト15Aの下降を停止する(S16)。この状態では、図30、図31に示すように、前係合部550Aの前側に前ローラ71Aが配置され、且つ後係合部560Aの後側に後ローラ72Aが配置される。板638Aは溝501Aのうち前後方向の中央部よりも後方に配置される。この為、この状態では穴639Aは穴521A、511Aに対して後方に位置する。
図13に示すように、CPU101はS17の処理において、図9に示す第1実施形態の第1位置決めシリンダ70を制御する代わりに、図32に示す位置決めシリンダ73Aを制御し、シリンダロッド732Aを本体部731Aから前方に伸長させる。これにより、図32、図33に示すように、後ローラ72Aが前ローラ71Aに向かって前方に移動し、後係合部560Aが後ローラ72Aと係合する。後係合部560Aが後ローラ72Aと係合した状態で、位置決めシリンダ73Aの付勢力によって後ローラ72Aは後係合部560Aを前方へ押圧する。
後ローラ72Aが後係合部560Aを前方に押圧すると、斜面561Aと斜面562Aとの左右方向の中心に対して斜面561A側(左側)又は斜面562A側(右側)に後ローラ72Aがずれた場合には、後ローラ72Aは斜面561A又は斜面562Aに沿って回転しながら後係合部560Aに対して相対的に前方へ移動する。仮に後ローラ72Aが回転しないと、後ローラ72Aと斜面561A、562Aとの間に後ローラ72Aが回転する場合よりも大きな摩擦が生じやすい。第2実施形態では後ローラ72Aが回転するので、後ローラ72Aと斜面561A、562Aとの間に大きさ摩擦が生じにくい。よって、印刷システム1は後ローラ72A、斜面561A、562Aが摩擦により摩耗することを抑制できる。
後係合部560Aが後ローラ72Aと係合しているので、後ローラ72Aの前方への移動に伴って、後係合部560Aがプラテン支持部材60Aに対して前方に移動する。これにより、プラテン50Aがプラテン支持部材60Aに対して前方に移動する。前係合部550Aは、後係合部560Aとの間の前後方向の距離を一定に維持しながら前ローラ71Aに向かって前方に移動する。この場合、斜面551Aと斜面552Aとの左右方向の中心に対して斜面551A側(左側)又は斜面552A側(右側)に前ローラ71Aがずれた場合には、前ローラ71Aは斜面551A又は斜面552Aに沿って回転しながら斜面551A、552Aに対して相対的に後方へ移動する。第2実施形態では前ローラ71Aが回転するので、後ローラ72Aと斜面561A、562Aと同様にして、印刷システム1は前ローラ71A、斜面551A、552Aが摩擦により摩耗することを抑制できる。
前係合部550Aが前ローラ71Aに係合することで、プラテン支持部材60Aに対するプラテン50Aの前方への移動が規制される。すなわち、前ローラ71Aの前後方向の位置はプラテン支持部材60Aに対するプラテン50Aの前後方向における基準の位置となる。後ローラ72Aは位置決めシリンダ73Aによって前ローラ71Aに向かって前方に付勢されているので、後ローラ72Aの後方への移動は規制される。よって、後係合部560Aが後ローラ72Aと係合した状態で後ローラ72Aがプラテン支持部材60Aに対して前方に移動することで、位置決め部70Aによってプラテン50Aが前後方向において印刷規定位置Wに位置決めされる。
さらに、水平面で前係合部550Aを切った断面形状は、後方から前方に向かうにつれて左右方向の両方に広がりながら開口する。この為、プラテン50Aが前後方向に位置決めされた状態では、位置決めシリンダ73Aの付勢力によって前ローラ71Aは前係合部550Aを左右方向の両方に押圧する。水平面で後係合部560Aを切った断面形状が、前方から後方に向かうにつれて左右方向の両方に広がりながら開口する。この為、プラテン50Aが前後方向に位置決めされた状態では、位置決めシリンダ73Aの付勢力によって後ローラ72Aは後係合部560Aを左右方向の両方に押圧する。このように、前係合部550Aと前ローラ71Aとの係合、後係合部560Aと後ローラ72Aとの係合により、前ローラ71A及び後ローラ72Aに対してプラテン50Aが左右方向に移動することが規制される。よって、後係合部560Aが後ローラ72Aと係合した状態で後ローラ72Aがプラテン支持部材60Aに対して前方に移動することで、位置決め部70Aによってプラテン50Aが左右方向において印刷規定位置Wに位置決めされる。
さらに、上下左右に延びる平面で前係合部550Aを切った断面形状は、下方から上方に向かうにつれて左右方向の両方に広がりながら開口する。この為、プラテン50Aが前後方向に位置決めされた状態では、位置決めシリンダ73Aの付勢力によって前ローラ71Aは前係合部550Aを下方に押圧する。上下左右に延びる平面で後係合部560Aを切った断面形状は、下方から上方に向かうにつれて左右方向の両方に広がりながら開口する。この為、プラテン50Aが前後方向に位置決めされた状態では、位置決めシリンダ73Aの付勢力によって後ローラ72Aは後係合部560Aを下方に押圧する。このように、前係合部550Aと前ローラ71Aとの係合、後係合部560Aと後ローラ72Aとの係合により、プラテン50Aの下面が凸部634A、635A、636Aに押圧される。この為、プラテン50Aが凸部634A、635A、636Aから浮くことが規制される。よって、後係合部560Aが後ローラ72Aと係合した状態で後ローラ72Aがプラテン支持部材60Aに対して前方に移動することで、プラテン50Aが上下方向において印刷規定位置Wに位置決めされる。
以上のように、位置決め部70Aによってプラテン50Aが前後左右上下方向において印刷規定位置Wに位置決めされる。この状態では、位置決めシリンダ73Aによって後ローラ72Aが前ローラ71Aに向かって前方に付勢された状態が維持される。この為、位置決めシリンダ73Aの付勢力によって、前ローラ71Aと前係合部550Aの係合、後係合部560Aと後ローラ72Aの係合が解除されにくい。よって、印刷システム1は印刷規定位置Wからプラテン50Aがずれることを抑制できる。
図33に示すように、平面視で、前ローラ71Aと前係合部550Aの接触部T1、T2、後ローラ72Aと後係合部560Aの接触部T3、T4は、何れも凸部634A、635A、636Aの中心を結んで形成される三角形領域C内に配置される。この為、位置決めシリンダ73Aの付勢力によって凸部634A、635A、636Aに作用する下方への力が、各凸部634A、635A、636Aへ均等に分散しやすい。よって、プラテン50Aの上下方向における印刷規定位置Wへの位置決めが安定する。
さらに、プラテン50Aがプラテン支持部材60Aに対して、前ローラ71Aと前係合部550A、後ローラ72Aと後係合部560Aの2点で印刷規定位置Wに位置決めされる。この為、前係合部550Aを中心にプラテン50Aが水平方向に回転することが規制され、且つ後係合部560Aを中心にプラテン50Aが水平方向に回転することが規制される。さらに、前係合部550Aを支点としてプラテン50Aの後端側が浮くことが規制され、且つ後係合部560Aを支点としてプラテン50Aの前端側が浮くことが規制される。
プラテン50Aがプラテン支持部材60Aに対して前方に移動することで、プラテン50Aが印刷規定位置Wに位置決めされると、板638Aが溝501Aの前後方向の中央部に配置される。これにより、プラテン50Aが印刷規定位置Wに位置決めされた状態では、穴511A、639A、521Aが左右方向に一直線上に並ぶ。この状態で、ユーザは回転規制部材91Aを穴521A、639A、511Aに挿入する。
回転規制部材91Aは水平方向においてプラテン支持部材60Aに対してプラテン50Aが回転することを規制する為のピンであり、右ブロック520Aの右端から左ブロック510Aの左端まで延びる。この場合、水平方向においてプラテン支持部材60Aに対してプラテン50Aが回転しようとすると、回転規制部材91Aが各穴521A、639A、511Aの壁に係合する。これにより、プラテン50Aが水平方向においてプラテン支持部材60Aに対して回転することがさらに規制される。以上により、プラテン支持部材60Aへのプラテン50Aの受け渡しから、印刷規定位置Wへのプラテン50Aの位置決めまでの一連の流れが完了する。
図13の説明に戻る。CPU101はS18~S20の処理を省略し、S21~24の処理を行う。S25の処理では、CPU101は、図32、図33に示す位置決めシリンダ73Aを制御し、シリンダロッド732Aを後方に、本体部731Aに退避させる。これにより、後ローラ72Aが後係合部560Aから後方に離れる。よって、プラテン50Aにおける前後左右上下の印刷規定位置Wへの位置決めが解除される。ユーザは図33に示す回転規制部材91Aを穴521A、639A、511Aから抜く。CPU101はS26の処理を省略し、S27、S28、S31、S32の処理を行う。CPU101は第2実施形態の印刷処理を終了する。
以上説明したように、第2実施形態の印刷システム1は、搬送機構14、15、印刷搬送機構41、及び位置決め部70Aを備える。搬送機構14は、プラテン50Aを前処理装置2に搬送する。印刷搬送機構41は、プラテン支持部材60Aを備える。プラテン支持部材60Aは、搬送機構15によって搬送されたプラテン50Aを支持する。印刷搬送機構41は、プラテン支持部材60Aをプリンタ3に搬送する。このため、位置決め部70Aはプラテン支持部材60Aによって支持されたプラテン50Aを、水平方向において印刷規定位置Wに位置決めする。よって、印刷システム1は、プリンタ3に対してプラテン50が搬送されない可能性を低減できる。プラテン50が印刷規定位置Wに位置決めされた状態でプリンタ3、4、5に搬送されるので、プリンタ3、4、5は、搬送されたプラテン50上の布帛Pの目標位置に位置ずれなく印刷できる。なお、同様にして、プリンタ6、7、8も位置ずれなく印刷できる。その他、第2実施形態の印刷システム1は、第1実施形態と同様の効果を奏することができる。
プラテン50Aには、後係合部560Aが設けられる。位置決め部70Aは、後ローラ72Aを備える。後ローラ72Aは、プラテン支持部材60Aに設けられ、プラテン支持部材60Aに対して前後方向に移動可能である。プラテン50Aが位置決め部70Aによって印刷規定位置Wに位置決めされる場合に後係合部560Aが後ローラ72Aに係合する。よって、印刷システム1はプラテン50Aを印刷規定位置Wにさらに正確に位置決めできる。
位置決め部70Aは、後係合部560Aが後ローラ72Aと係合した状態で後ローラ72Aが前後方向に移動することで、プラテン50Aを印刷規定位置Wに位置決めする。位置決め部80Aは、前ローラ71Aを備える。前ローラ71Aは、プラテン支持部材60Aに設けられる。例えば、後ローラ72Aは、第1位置と第2位置との間を移動可能である。第1位置と第2位置とは、互いに前後方向に異なる。プラテン50Aがプラテン支持部材60Aによって下方から支持された状態で、後ローラ72Aが第1位置に位置する場合、後係合部560Aが後ローラ72Aに前方から係合し、且つ前係合部550Aが前ローラ71Aに後方から係合する。プラテン50Aがプラテン支持部材60Aによって下方から支持された状態で、後ローラ72Aが第2位置に位置する場合、後係合部560Aが後ローラ72Aから前方に離れ、又は前係合部550Aが前ローラ71Aから後方に離れる。又は、プラテン50Aがプラテン支持部材60Aによって下方から支持された状態で、後ローラ72Aが第2位置に位置する場合、後係合部560Aが後ローラ72Aから前方に離れ、且つ前係合部550Aが前ローラ71Aから後方に離れる。プラテン50Aが位置決め部70Aによって印刷規定位置Wに位置決めされる場合に後係合部560Aが後ローラ72Aに係合し、前係合部550Aが前ローラ71Aに係合する。このように、プラテン50Aはプラテン支持部材60Aに前後方向において2点で係合する。よって、印刷システム1は水平方向においてプラテン支持部材60Aに対してプラテン50Aが回転することを抑制できる。
位置決め部70Aは、位置決めシリンダ73Aを備える。位置決めシリンダ73Aは後ローラ72Aを前ローラ71Aに向かって付勢する。この為、位置決めシリンダ73Aの付勢力によって後係合部560Aが後ローラ72Aに確実に係合する。よって、印刷システム1はプラテン50Aを印刷規定位置Wにさらに正確に位置決めできる。プラテン50Aが印刷規定位置Wに位置決めされた状態で、位置決めシリンダ73Aの付勢力が維持される。よって、印刷システム1は印刷規定位置Wからプラテン50Aがずれることを抑制できる。
後ローラ72Aは、前後方向において前ローラ71Aに対して近づく方向に移動可能に設けられる。印刷システム1は、近接センサ90とCPU101とを備える。近接センサ90は、プラテン支持部材60Aによってプラテン50Aが支持されたことを検出する。CPU101は、プラテン支持部材60Aによってプラテン50Aが支持されたことが近接センサ90によって検出された場合、位置決めシリンダ73Aを制御することで後ローラ72Aを前ローラ71Aに向かって付勢する。プラテン50Aがプラテン支持部材60Aから離れた状態で、後ローラ72Aと前ローラ71Aとの間の前後方向の距離L2が後係合部560Aと前係合部550Aとの間の前後方向の距離L1よりも大きい。この為、印刷システム1は、プラテン50Aがプラテン支持部材60Aに受け渡される場合に、前係合部550Aと後係合部560Aが前ローラ71Aと後ローラ72Aに対して上方から干渉することを抑制できる。プラテン支持部材60Aによってプラテン50Aが支持されたことが近接センサ90によって検出された場合、位置決めシリンダ73Aが制御されて後ローラ72Aが前ローラ71Aに向かって付勢される。よって、印刷システム1は、プラテン支持部材60Aによってプラテン50Aが支持されていない状態で、位置決めシリンダ73Aによって後ローラ72Aが前ローラ71Aに向かって付勢されることを抑制できる。
位置決め部70Aは、後係合部560Aが後ローラ72Aと係合した状態で後ローラ72Aが前方に移動することで、左右方向においてプラテン50Aを印刷規定位置Wに位置決めする。例えば、後ローラ72Aは、第1位置と第2位置との間を移動可能である。第1位置と第2位置とは、互いに前後方向に異なる。プラテン50Aがプラテン支持部材60Aによって下方から支持された状態で、後ローラ72Aが第1位置に位置する場合、後係合部560Aが後ローラ72Aに前方及び左右方向から係合し、且つ前係合部550Aが前ローラ71Aに後方及び左右方向から係合する。プラテン50Aがプラテン支持部材60Aによって下方から支持された状態で、後ローラ72Aが第2位置に位置する場合、後係合部560Aが後ローラ72Aから前方に離れ、又は前係合部550Aが前ローラ71Aから後方に離れる。又は、プラテン50Aがプラテン支持部材60Aによって下方から支持された状態で、後ローラ72Aが第2位置に位置する場合、後係合部560Aが後ローラ72Aから前方に離れ、且つ前係合部550Aが前ローラ71Aから後方に離れる。よって、印刷システム1はプラテン50Aを前後方向において印刷規定位置Wに位置決めすることに加え、プラテン50Aを左右方向においても印刷規定位置Wに位置決めできる。
後係合部560Aは、後係合部560Aから後ローラ72Aに向かうにつれて、すなわち前方から後方に向かうにつれて左右方向の両方に広がりながら開口する。この為、プラテン50Aを前後方向において印刷規定位置Wに位置決めする為の機構と、プラテン50Aを左右方向において印刷規定位置Wに位置決めする為の機構とを別々で設ける必要がない。よって、印刷システム1は簡易な機構でプラテン50Aを前後方向と左右方向において印刷規定位置Wに位置決めできる。
位置決め部70Aは、後係合部560Aが後ローラ72Aと係合した状態で後ローラ72Aが前方に移動することで、上下方向においてプラテン50Aを印刷規定位置Wに位置決めする。例えば、後ローラ72Aは、第1位置と第2位置との間を移動可能である。第1位置と第2位置とは、互いに前後方向に異なる。プラテン50Aがプラテン支持部材60Aによって下方から支持された状態で、後ローラ72Aが第1位置に位置する場合、後係合部560Aが後ローラ72Aに前方及び下方から係合し、且つ前係合部550Aが前ローラ71Aに後方及び下方から係合する。プラテン50Aがプラテン支持部材60Aによって下方から支持された状態で、後ローラ72Aが第2位置に位置する場合、後係合部560Aが後ローラ72Aから前方に離れ、又は前係合部550Aが前ローラ71Aから後方に離れる。又は、プラテン50Aがプラテン支持部材60Aによって下方から支持された状態で、後ローラ72Aが第2位置に位置する場合、後係合部560Aが後ローラ72Aから前方に離れ、且つ前係合部550Aが前ローラ71Aから後方に離れる。よって、印刷システム1はプラテン50Aを前後方向において印刷規定位置Wに位置決めすることに加え、プラテン50Aを上下方向においても印刷規定位置Wに位置決めできる。
印刷システム1は回転規制部材91Aを備える。よって、印刷システム1は水平方向においてプラテン支持部材60Aに対してプラテン50Aが回転することを回転規制部材91Aによって抑制できる。仮にプラテン50Aに上方への力が作用した場合、回転規制部材91Aが穴521A、639A、511Aの壁に係合する。よって、印刷システム1は、プラテン50Aがプラテン支持部材60Aから上方に外れることを回転規制部材91Aによって抑制できる。
印刷システム1はS13の処理においてCPU101によって搬送モータ137を制御する。これにより、プラテン50Aがプラテン支持部材60Aに受け渡される最中にプラテン支持部材60Aが前後方向に移動することが抑制される。よって、印刷システム1は、プラテン50Aのプラテン支持部材60Aへの受け渡しが困難になることを抑制できる。
第2実施形態において、プラテン50Aは本発明のプラテンの一例である。プラテン支持部材60Aは本発明のプラテン支持部材の一例である。位置決め部70Aは本発明の位置決め部の一例である。
本発明は第2実施形態に限定されることなく、種々の変更が可能である。例えば第2実施形態において後ローラ72Aがプラテン支持部材60Aに対して固定され、前ローラ71Aがプラテン支持部材60Aに対して前後方向に移動可能であってもよい。第2実施形態において後ローラ72Aは前後方向ではなく、例えば左右方向に移動可能であってもよい。この場合、前ローラ71Aは後ローラ72Aに対して左側又は右側に設けられ、ブロック500Aは第2実施形態の向きから、自身を中心として水平方向に90°回転した向きでプラテン50Aに固定されればよい。
第2実施形態において前ローラ71Aと後ローラ72Aの一方又は両方は回転不能であってもよい。例えば前ローラ71Aに代えて壁が設けられてもよい。第2実施形態では前ローラ71A、後ローラ72Aは円柱状である。これに対し、前ローラ71Aと後ローラ72Aは他の形状、例えば円錐状であってもよい。前ローラ71Aと後ローラ72Aは平面視で多角形状でもよく、例えば前係合部550Aと後係合部560Aの平面視の形状を有してもよい。前ローラ71Aと後ローラ72Aは互いに異なる形状であってもよい。
前係合部550A、後係合部560Aの一方又は両方は第2実施形態とは異なる形状であってもよい。例えば前係合部550Aと後係合部560Aは上下左右に延びる平面であってもよいし、湾曲状であってもよい。水平面で前係合部550Aを切った形状は、後方から前方に向かうにつれて左右方向の内側に傾斜するテーパ状であってもよい。この場合、水平面で前ローラ71Aを切った形状は、前係合部550Aのテーパ状に対応し、前方から後方に向かうにつれて左右方向に広がるように開口した形状であってもよい。
第2実施形態では前係合部550Aと後係合部560Aはブロック500Aによって構成された。これに対し、前係合部550Aと後係合部560Aは分割された複数のブロックで構成されてもよい。例えばプラテン50Aの下面には、斜面551Aが形成されたブロック、斜面552Aが形成されたブロック、斜面561Aが形成されたブロック、斜面562Aが形成されたブロックの4つのブロックが固定されてもよいし、斜面551A、552Aが形成されたブロック、斜面561A、562Aが形成されたブロックの2つのブロックが固定されてもよい。上記実施形態では、斜面551A、552Aの夫々の後端は互いに左右方向に離れる。これに対し、斜面551A、552Aの夫々の後端は互いに接続してもよい。同様に、斜面561A、562Aの夫々の前端は互いに接続してもよい。
第2実施形態において位置決めシリンダ73Aに代えて、バネ、ゴム、スポンジ等の弾性部材が設けられてもよい。すなわち、後ローラ72Aは弾性部材の弾性力によって前ローラ71Aに向けて付勢されてもよい。
第2実施形態において位置決めシリンダ73Aは後ローラ72Aを後方から押圧することで、後ローラ72Aを前ローラ71Aに向かって付勢する。これに対し、位置決めシリンダ73Aは後ローラ72Aを前方から引くことで、後ローラ72Aを前ローラ71Aに向かって付勢してもよい。位置決めシリンダ73Aは前ローラ71Aを後ローラ72Aに向かって付勢してもよい。
第2実施形態ではユーザが回転規制部材91Aを各穴521A、639A、511Aに挿入する。これに対し、印刷システム1は回転規制部材91Aを各穴521A、639A、511Aに挿入した位置と、回転規制部材91Aを各穴521A、639A、511Aから抜いた位置とに移動させる為の規制ピン駆動部(例えばロボット)を備えてもよい。この場合、CPU101は規制ピン駆動部を制御し、回転規制部材91Aの各穴521A、639A、511Aへの抜き差しを行ってもよい。
第2実施形態では回転規制部材91Aが各穴521A、639A、511Aに挿入されることで、水平方向においてプラテン支持部材60Aに対してプラテン50Aが回転することが規制される。回転規制部材91Aには、ピンとは異なる部材、例えば板、ブロックが採用されてもよい。印刷システム1は他の回転規制機構を採用し、水平方向においてプラテン支持部材60Aに対してプラテン50Aが回転することを規制してもよい。印刷システム1は回転規制部材91Aを省略してもよい。
第2実施形態において印刷システム1は回転規制部材91Aの穴521A、639A、511Aへの抜き差しを検出する為のセンサを備えてもよい。この場合、回転規制部材91Aが穴521A、639A、511Aへ挿入されたこと、又は回転規制部材91Aが穴521A、639A、511Aから抜かれたことがセンサによって検出された場合に、CPU101は次の処理へ移行してもよい。
第2実施形態では印刷システム1は規制制御によってプラテン支持部材60Aが印刷搬送機構41、42、43によって前後方向に搬送されることを規制した。これに対し、印刷システム1は構造的にプラテン支持部材60Aが印刷搬送機構41によって前後方向に搬送されることを規制可能であってもよい。例えばプラテン支持部材60Aに移動規制穴が設けられ、移動規制穴に移動規制ピンが挿入されることで、移動規制ピンが印刷搬送機構41に係合してもよい。この場合、移動規制ピンが移動規制穴と印刷搬送機構41の両方に係合するので、印刷システム1は構造的にプラテン支持部材60Aが印刷搬送機構41によって前後方向に搬送されることを規制できる。ユーザはプラテン支持部材60Aに対してプラテン50Aを取り付ける前に移動規制ピンを移動規制穴に挿入し、プラテン支持部材60Aに対するプラテン50Aの取り付けが完了した後に移動規制ピンを移動規制穴から抜けばよい。印刷システム1は移動規制ピンを移動規制穴に挿入した位置と移動規制ピンを移動規制穴から抜いた位置とに移動させる為の移動規制ピン駆動部(例えばロボット)を備えてもよい。この場合、CPU101は移動規制ピン駆動部を制御し、移動規制ピンの移動規制穴への抜き差しを行ってもよい。
第2実施形態において、接触部T1~T4の一部又は全部は平面視で三角形領域C外に配置されてもよい。凸部634A、635A、636Aの個数は2つ以下でもよいし、4つ以上でもよい。印刷システム1は凸部634A、635A、636Aを省略してもよい。この場合、上板155Aの下面が上板631Aの上面に接触してもよい。凸部634A、635A、636Aは上板155Aの下面に設けられてもよい。