JP6471475B2 - 車両用開閉部材の制御装置及び制御方法 - Google Patents
車両用開閉部材の制御装置及び制御方法 Download PDFInfo
- Publication number
- JP6471475B2 JP6471475B2 JP2014238899A JP2014238899A JP6471475B2 JP 6471475 B2 JP6471475 B2 JP 6471475B2 JP 2014238899 A JP2014238899 A JP 2014238899A JP 2014238899 A JP2014238899 A JP 2014238899A JP 6471475 B2 JP6471475 B2 JP 6471475B2
- Authority
- JP
- Japan
- Prior art keywords
- drive motor
- switch
- control unit
- signal
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Classifications
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/40—Safety devices, e.g. detection of obstructions or end positions
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/60—Power-operated mechanisms for wings using electrical actuators
- E05F15/603—Power-operated mechanisms for wings using electrical actuators using rotary electromotors
- E05F15/632—Power-operated mechanisms for wings using electrical actuators using rotary electromotors for horizontally-sliding wings
- E05F15/655—Power-operated mechanisms for wings using electrical actuators using rotary electromotors for horizontally-sliding wings specially adapted for vehicle wings
- E05F15/659—Control circuits therefor
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/60—Power-operated mechanisms for wings using electrical actuators
- E05F15/603—Power-operated mechanisms for wings using electrical actuators using rotary electromotors
- E05F15/665—Power-operated mechanisms for wings using electrical actuators using rotary electromotors for vertically-sliding wings
- E05F15/689—Power-operated mechanisms for wings using electrical actuators using rotary electromotors for vertically-sliding wings specially adapted for vehicle windows
- E05F15/695—Control circuits therefor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P7/00—Arrangements for regulating or controlling the speed or torque of electric DC motors
- H02P7/03—Arrangements for regulating or controlling the speed or torque of electric DC motors for controlling the direction of rotation of DC motors
- H02P7/05—Arrangements for regulating or controlling the speed or torque of electric DC motors for controlling the direction of rotation of DC motors by means of electronic switching
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60J—WINDOWS, WINDSCREENS, NON-FIXED ROOFS, DOORS, OR SIMILAR DEVICES FOR VEHICLES; REMOVABLE EXTERNAL PROTECTIVE COVERINGS SPECIALLY ADAPTED FOR VEHICLES
- B60J1/00—Windows; Windscreens; Accessories therefor
- B60J1/08—Windows; Windscreens; Accessories therefor arranged at vehicle sides
- B60J1/10—Windows; Windscreens; Accessories therefor arranged at vehicle sides fixedly mounted
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60J—WINDOWS, WINDSCREENS, NON-FIXED ROOFS, DOORS, OR SIMILAR DEVICES FOR VEHICLES; REMOVABLE EXTERNAL PROTECTIVE COVERINGS SPECIALLY ADAPTED FOR VEHICLES
- B60J7/00—Non-fixed roofs; Roofs with movable panels, e.g. rotary sunroofs
- B60J7/02—Non-fixed roofs; Roofs with movable panels, e.g. rotary sunroofs of sliding type, e.g. comprising guide shoes
- B60J7/04—Non-fixed roofs; Roofs with movable panels, e.g. rotary sunroofs of sliding type, e.g. comprising guide shoes with rigid plate-like element or elements, e.g. open roofs with harmonica-type folding rigid panels
- B60J7/057—Driving or actuating arrangements e.g. manually operated levers or knobs
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P7/00—Arrangements for regulating or controlling the speed or torque of electric DC motors
- H02P7/06—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual dc dynamo-electric motor by varying field or armature current
- H02P7/18—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual dc dynamo-electric motor by varying field or armature current by master control with auxiliary power
- H02P7/24—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual dc dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices
- H02P7/28—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual dc dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices using semiconductor devices
- H02P7/285—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual dc dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices using semiconductor devices controlling armature supply only
Description
図1は、パワーサンルーフユニット100及びパワーウィンドウユニット106の概略構成図である。
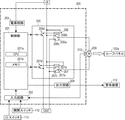
図2は、車両用開閉部材の制御装置200の機能ブロック図である。図2に示すように、制御装置200は、制御部201、入力回路202、電源回路203、出力回路204、駆動回路205及びパルスセンサ210を備える。制御装置200は、ルーフパネル102aを開閉駆動する駆動モータ209を制御する装置である。なお、制御装置200は、クロック周波数を提供する発振器や、カウンタ回路等のハードウェア素子をさらに備えていてもよい。
制御部201は、トランジスタ206d、207dのベース端子の電圧を変化されることにより、ON/OFFを切り替える。これにより、制御部201は、リレー206、207のソレノイドに流れる電流を制御し、リレー206、207の接続先を切り替えることができる。トランジスタ206d、207dがOFFのとき、リレー206の端子206a及びリレー207の端子207aは、グラウンドGNDに接続される。各トランジスタ206d、207dがONになると、リレー206、207のソレノイドに流れる電流が変化し、端子206a、207aがバッテリ電源+Bに接続される。換言すれば、制御部201は、トランジスタ206dをONすることで、リレー206の端子206aをバッテリ電源+Bに接続し(端子206bと206aとの接続)、トランジスタ206dをOFFすることで、リレー206の端子206aをグラウンドGNDに接続する(端子206cと206aとの接続)。また、制御部201は、トランジスタ207dをONすることで、リレー207の端子207aをバッテリ電源+Bに接続し(端子207bと207aとの接続)、トランジスタ207dをOFFすることで、リレー207の端子207aをグラウンドGNDに接続する(端子207aと207cとの接続)。上述のように、本明細書において各リレーの切替端子はONのときにバッテリ電源+Bに接続され、OFFのときにグラウンドGNDに接続されるものとする。

本実施形態に係る車両用開閉部材の制御装置による制御方法について説明する。本実施形態に係る制御装置は、挟み込みを検出して開駆動又は閉駆動を停止させる信号を出力した後に、リレーの固着の有無を監視し、該固着がある場合には車両用開閉部材の動作を停止させ、かつ停止状態を維持させるように信号を出力する。以下の説明では車両用開閉部材の閉駆動時に物体が挟み込まれた場合を想定するが、開駆動時に挟み込み等が生じた場合であっても、表1に基づいてリレーのON/OFF等の関係についての説明を適宜読み替えることにより、本発明は同様に適用可能である。
本発明の第2実施形態に係る車両用開閉部材の制御装置及び制御方法について説明する。
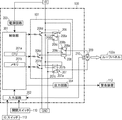
図5は、車両用開閉部材の制御装置500の機能ブロック図である。図5に示すように、制御装置500は、制御部201、入力回路202、電源回路203、出力回路204、駆動回路501及びパルスセンサ210を備える。制御部201、入力回路202、電源回路203及び出力回路204の構成は、第1実施形態と略同様であり、説明を省略する。なお、制御装置500は、電源遮断回路、クロック周波数を提供する発振器、カウンタ回路等のハードウェア素子等をさらに備えていてもよい。
本実施形態に係る車両用開閉部材の制御装置による制御方法について説明する。
図8は第2実施形態の変形例に係るフローチャートである。図6との違いは、リレー208にON信号を出力するステップS602の前にトランジスタ207dにON信号を出力するステップS604を設けている点である。ステップS604において、リレー206はON固着、リレー207はON、リレー208はOFFになるため、駆動モータ209は停止する。その後、ステップS602において、制御部201はリレー208にON信号を出力する。これにより、リレー206はON固着、リレー207はON、リレー208はONになるため、駆動モータ209は反転し、ルーフパネル102aによる物体の挟み込みが解消される。したがって、本変形例においても図6のフローチャートと同様の制御が実現される。
第2実施形態の別の変形例として、図5の回路において、リレー208をリレー206の代替回路として用いてもよい。制御部201は、リレー208にリレー206と反対の動作をするように信号を出力する。通常動作時のトランジスタ206d〜208dのON/OFFと、駆動モータ209の正転、反転及び停止との関係を表3に示す。
第1又は第2の実施形態において、駆動モータ209の制御としてPWM(Pulse Width Modulation)制御を行い、切替部として、リレー以外のスイッチング素子(スイッチ)を用いてもよい。例えば、リレー206〜208の代わりにFETを用いて車両用開閉部材の制御装置を構成してもよい。すなわち、FETが故障により常にON、又はOFFになった場合においても、駆動モータの回転方向を検出することで、故障に対するフェールセーフを実現することができる。なお、切替部としてリレーの代わりにFETを用いる構成の場合には、上記第1又は第2の実施形態の説明の中で、「リレーの固着」を「FETの故障」に読み替えることにより、該構成は同様に説明される。
Claims (7)
- 第1の方向に回転することにより車両に設けられる開閉部材を閉駆動させ、前記第1の方向とは反対の第2の方向に回転することにより前記開閉部材を開駆動させる駆動モータの回転の開始動作及び前記駆動モータの回転の方向を、切替部の接続を切り替えるための制御信号を出力することにより制御する制御部と、
前記駆動モータの回転の方向を示す信号を前記制御部に出力する検出部とを備え、
前記制御部は、前記検出部からの信号を基に、前記切替部の固着の有無を判断し、
前記制御部は、前記固着があると判断した場合、前記駆動モータを停止させ、かつ停止状態を維持させるように前記切替部の接続を切り替えるための制御信号を出力し、
前記切替部は、
制御部からの制御信号によりオン又はオフに制御される、第1のスイッチ、第2のスイッチ及び第3のスイッチを有し、
前記第1のスイッチがオン、前記第2のスイッチがオフ、かつ前記第3のスイッチがオフの場合に前記駆動モータは前記第1の方向に回転し、
前記第1のスイッチがオフ、かつ前記第2のスイッチがオンの場合に前記駆動モータは前記第2の方向に回転し、
前記第3のスイッチがオン、かつ前記第2のスイッチがオンの場合に前記駆動モータは前記第2の方向に回転し、
それ以外の場合に前記駆動モータは停止する
ように構成され、
前記制御部は、前記第1のスイッチを切り替えることができない固着が有ると判断した場合に、前記第3のスイッチを切り替えることにより前記駆動モータを停止させ、又は停止状態を維持させる、車両用開閉部材の制御装置。 - 前記固着の有無の判断は、前記開閉部材が開駆動又は閉駆動する際に前記開閉部材に物体が挟み込まれたときに実行される、請求項1に記載の制御装置。
- 前記制御部は、前記制御部が前記駆動モータを停止させる信号を出力した後、前記駆動モータが前記第1の方向又は第2の方向に回転していることを示す信号が第1の規定時間以上前記検出部から入力され続けている場合に前記固着があると判断する、請求項1又は2に記載の制御装置。
- 前記制御部は、前記制御部が前記駆動モータを停止させる信号を出力し、その後前記駆動モータの回転方向を反転させる信号を出力した後、前記駆動モータが前記第1の方向又は第2の方向に回転していることを示す信号が第2の規定時間が経過するまでに入力されない場合に前記固着があると判断する、請求項1乃至3のいずれか1項に記載の制御装置。
- 前記制御部は、さらに前記第2のスイッチを切り替えることにより前記駆動モータを反転動作させる、請求項1に記載の車両用開閉部材の制御装置。
- 前記制御部は、前記検出部からの信号を基に前記開閉部材の位置を判断し、
前記制御部は、前記駆動モータを停止させ、かつ停止状態を維持させるように前記切替部の接続を切り替えるための制御信号を出力するか否かを前記開閉部材の位置に基づいて決定する、請求項1乃至5のいずれか1項に記載の車両用開閉部材の制御装置。 - 車両に設けられる開閉部材の駆動モータの回転を停止させるために、切替部の接続を切り替えるための制御信号を出力する第1出力ステップと、
前記駆動モータが回転していることを示す信号を入力する入力ステップと、
前記駆動モータが前記開閉部材を閉駆動する第1の方向に回転していることを示す信号を基に、前記切替部が固着していると判断する判断ステップと、
前記固着があると判断した場合、前記駆動モータを停止させ、かつ停止状態を維持させるように前記切替部の接続を切り替える制御信号を出力する第2出力ステップと
を備え、
前記切替部は、
制御信号によりオン又はオフに制御される、第1のスイッチ、第2のスイッチ及び第3のスイッチを有し、
前記第1のスイッチがオン、前記第2のスイッチがオフ、かつ前記第3のスイッチがオフの場合に前記駆動モータは前記第1の方向に回転し、
前記第1のスイッチがオフ、かつ前記第2のスイッチがオンの場合に前記駆動モータは前記第1の方向とは反対の第2の方向に回転し、
前記第3のスイッチがオン、かつ前記第2のスイッチがオンの場合に前記駆動モータは前記第2の方向に回転し、
それ以外の場合に前記駆動モータは停止する
ように構成され、
前記判断ステップにおいて、前記第1のスイッチを切り替えることができない固着が有ると判断された場合に、前記第2出力ステップにおいて、前記第3のスイッチを切り替えることにより前記駆動モータを停止させ、又は停止状態を維持させるように前記切替部の接続を切り替える制御信号を出力する、車両用開閉部材の制御方法。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014238899A JP6471475B2 (ja) | 2014-11-26 | 2014-11-26 | 車両用開閉部材の制御装置及び制御方法 |
| US15/529,155 US10253544B2 (en) | 2014-11-26 | 2015-09-25 | Control device and control method of opening and closing member for vehicle |
| PCT/JP2015/004879 WO2016084291A1 (ja) | 2014-11-26 | 2015-09-25 | 車両用開閉部材の制御装置及び制御方法 |
| CN201580065517.1A CN107002445B (zh) | 2014-11-26 | 2015-09-25 | 车辆用开闭部件的控制装置和控制方法 |
| CA2968800A CA2968800C (en) | 2014-11-26 | 2015-09-25 | Control device and control method of opening and closing member for vehicle |
| MX2017006106A MX2017006106A (es) | 2014-11-26 | 2015-09-25 | Dispositivo de control y metodo de control de miembro de apertura y cierre para vehiculo. |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014238899A JP6471475B2 (ja) | 2014-11-26 | 2014-11-26 | 車両用開閉部材の制御装置及び制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016098625A JP2016098625A (ja) | 2016-05-30 |
| JP6471475B2 true JP6471475B2 (ja) | 2019-02-20 |
Family
ID=56073891
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014238899A Expired - Fee Related JP6471475B2 (ja) | 2014-11-26 | 2014-11-26 | 車両用開閉部材の制御装置及び制御方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10253544B2 (ja) |
| JP (1) | JP6471475B2 (ja) |
| CN (1) | CN107002445B (ja) |
| CA (1) | CA2968800C (ja) |
| MX (1) | MX2017006106A (ja) |
| WO (1) | WO2016084291A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106703583B (zh) * | 2016-12-22 | 2018-04-27 | 广州镭铯电子有限公司 | 电动车窗的防夹控制方法及其电机的堵转控制方法 |
| CN107368775A (zh) | 2017-04-21 | 2017-11-21 | 阿里巴巴集团控股有限公司 | 一种虹膜识别过程中的预览方法及装置 |
| JP7068128B2 (ja) * | 2018-10-03 | 2022-05-16 | トヨタ自動車株式会社 | 制御システム及び車両 |
| JP7365189B2 (ja) * | 2019-10-10 | 2023-10-19 | 西川ゴム工業株式会社 | センサー付きプロテクター |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2594573Y2 (ja) * | 1993-11-02 | 1999-04-26 | 住友電装株式会社 | リレーの異常検知装置 |
| JP2908222B2 (ja) * | 1993-12-15 | 1999-06-21 | 株式会社小糸製作所 | 安全装置を備えるパワーウインド装置 |
| JPH0813909A (ja) * | 1994-06-30 | 1996-01-16 | Riken Corp | 自動車用パワーウィンドウの安全装置 |
| JPH08312244A (ja) * | 1995-05-16 | 1996-11-26 | Toyota Motor Corp | パワーウインド制御装置 |
| JP3546641B2 (ja) * | 1997-04-30 | 2004-07-28 | 日産自動車株式会社 | 車両用パワーウインドウ装置 |
| EP1011184A1 (fr) * | 1998-12-15 | 2000-06-21 | Talltec Technologies Holdings S.A. | Dispositif de sécurité associé à un panneau coulissant entraíné par un moteur électrique et procédé de mise en oeuvre d'un tel dispositif |
| JP2003125596A (ja) * | 2001-10-12 | 2003-04-25 | Omron Corp | 駆動装置 |
| US6906487B2 (en) * | 2002-01-21 | 2005-06-14 | International Rectifier Corporation | Anti-pinch window drive circuit |
| CN1472089A (zh) * | 2002-08-02 | 2004-02-04 | 三菱电机株式会社 | 车辆用控制装置 |
| JP2004116051A (ja) * | 2002-09-25 | 2004-04-15 | Niles Co Ltd | パワーウィンドの制御装置 |
| JP4487588B2 (ja) * | 2004-02-18 | 2010-06-23 | アイシン精機株式会社 | 開閉体制御装置 |
| US7530199B2 (en) * | 2004-03-22 | 2009-05-12 | Mitsui Mining And Smelting Co., Ltd. | Method for controlling sliding speed of vehicle slide door |
| JP2005351042A (ja) * | 2004-06-14 | 2005-12-22 | Aisin Seiki Co Ltd | 開閉体制御装置 |
| DE102005030600A1 (de) * | 2005-06-30 | 2007-01-11 | Siemens Ag | Einklemmschutzerkennung auf Prinzip von Vergleich des Duty Cicle einer PWM Regelung |
| JP2008287906A (ja) * | 2007-05-15 | 2008-11-27 | Mitsuba Corp | 駆動制御装置、および車両用開閉装置 |
| JP2008287069A (ja) * | 2007-05-18 | 2008-11-27 | Canon Inc | 帯電装置及び画像形成装置 |
| JP5078582B2 (ja) * | 2007-12-10 | 2012-11-21 | オムロンオートモーティブエレクトロニクス株式会社 | モータ制御装置 |
| JP2009268335A (ja) * | 2008-03-31 | 2009-11-12 | Mitsuba Corp | モータ装置 |
| JP2010220294A (ja) | 2009-03-13 | 2010-09-30 | Mitsuba Corp | モータ制御装置、およびモータ装置 |
| DE102009019015A1 (de) * | 2009-04-27 | 2010-11-11 | Continental Automotive Gmbh | Verfahren und Vorrichtung zum Erkennen einer Einklemmsituation |
| CN103287357B (zh) * | 2012-02-28 | 2015-12-23 | 富士通天株式会社 | 车辆控制装置、车辆控制系统以及车辆控制方法 |
-
2014
- 2014-11-26 JP JP2014238899A patent/JP6471475B2/ja not_active Expired - Fee Related
-
2015
- 2015-09-25 WO PCT/JP2015/004879 patent/WO2016084291A1/ja active Application Filing
- 2015-09-25 CN CN201580065517.1A patent/CN107002445B/zh not_active Expired - Fee Related
- 2015-09-25 US US15/529,155 patent/US10253544B2/en active Active
- 2015-09-25 MX MX2017006106A patent/MX2017006106A/es unknown
- 2015-09-25 CA CA2968800A patent/CA2968800C/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CA2968800A1 (en) | 2016-06-02 |
| CN107002445A (zh) | 2017-08-01 |
| US10253544B2 (en) | 2019-04-09 |
| CN107002445B (zh) | 2018-04-27 |
| WO2016084291A1 (ja) | 2016-06-02 |
| CA2968800C (en) | 2019-05-14 |
| JP2016098625A (ja) | 2016-05-30 |
| MX2017006106A (es) | 2017-07-27 |
| US20170342757A1 (en) | 2017-11-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6471475B2 (ja) | 車両用開閉部材の制御装置及び制御方法 | |
| JP6897599B2 (ja) | パワーウインド制御装置 | |
| US10883302B2 (en) | Opening-closing-body drive motor and opening-closing-body drive system | |
| CN109104895B (zh) | 开闭体驱动电动机及开闭体驱动系统 | |
| JP6848512B2 (ja) | 開閉体駆動モータ及び開閉体駆動システム | |
| JP4671334B2 (ja) | 駆動装置の故障検出回路 | |
| JP2015055071A (ja) | 車両用パワーウインドウ装置 | |
| JP2010138666A (ja) | 開閉部材制御装置及び開閉部材の制御方法 | |
| CN110300832B (zh) | 开闭体驱动电动机及开闭体驱动系统 | |
| JP2017175899A (ja) | 開閉体駆動モータ及び開閉体駆動システム | |
| JP2015085739A (ja) | 車両用開閉部材の制御装置及び制御方法 | |
| WO2015063999A1 (ja) | 車両用開閉部材の制御装置及びその制御方法 | |
| JP3948043B2 (ja) | 開閉機構のモータ制御装置 | |
| JP6733296B2 (ja) | パワーウインドシステム | |
| JP6880815B2 (ja) | 開閉体駆動モータ及び開閉体駆動システム | |
| JP6988389B2 (ja) | 開閉体制御装置、開閉体駆動モータ及び開閉体駆動システム | |
| WO2018155178A1 (ja) | 開閉体駆動モータ及び開閉体駆動システム | |
| JP2021095033A (ja) | 車両用収納装置 | |
| JP6648621B2 (ja) | 開閉体駆動モータ及びパワーウインドシステム | |
| JP4668674B2 (ja) | ドアロック制御装置 | |
| JPH11247529A (ja) | パワーウインド装置 | |
| KR20040088279A (ko) | 파워 윈도우의 구동 제어장치 및 그 제어방법 | |
| JP2018138734A (ja) | 開閉体駆動モータ、開閉体駆動システム、及びパワーウインドシステム | |
| JP2006044444A (ja) | パワーウインドウ駆動装置 | |
| JPH03145993A (ja) | 直流モータの速度制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170510 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180419 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180614 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180925 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181016 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181225 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190107 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6471475 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |