JP6128155B2 - ハイブリッド自動車 - Google Patents
ハイブリッド自動車 Download PDFInfo
- Publication number
- JP6128155B2 JP6128155B2 JP2015062375A JP2015062375A JP6128155B2 JP 6128155 B2 JP6128155 B2 JP 6128155B2 JP 2015062375 A JP2015062375 A JP 2015062375A JP 2015062375 A JP2015062375 A JP 2015062375A JP 6128155 B2 JP6128155 B2 JP 6128155B2
- Authority
- JP
- Japan
- Prior art keywords
- travel control
- retreat travel
- temperature difference
- motor
- retreat
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/50—Control strategies for responding to system failures, e.g. for fault diagnosis, failsafe operation or limp mode
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K1/00—Arrangement or mounting of electrical propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/26—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the motors or the generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/28—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the electric energy storing means, e.g. batteries or capacitors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/36—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the transmission gearings
- B60K6/365—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the transmission gearings with the gears having orbital motion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/44—Series-parallel type
- B60K6/445—Differential gearing distribution type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/50—Architecture of the driveline characterised by arrangement or kind of transmission units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L3/00—Electric devices on electrically-propelled vehicles for safety purposes; Monitoring operating variables, e.g. speed, deceleration or energy consumption
- B60L3/0023—Detecting, eliminating, remedying or compensating for drive train abnormalities, e.g. failures within the drive train
- B60L3/003—Detecting, eliminating, remedying or compensating for drive train abnormalities, e.g. failures within the drive train relating to inverters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K1/00—Arrangement or mounting of electrical propulsion units
- B60K2001/003—Arrangement or mounting of electrical propulsion units with means for cooling the electrical propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/08—Electric propulsion units
- B60W2510/087—Temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/24—Energy storage means
- B60W2510/242—Energy storage means for electrical energy
- B60W2510/244—Charge state
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Engineering & Computer Science (AREA)
- Combustion & Propulsion (AREA)
- Chemical & Material Sciences (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- General Health & Medical Sciences (AREA)
- Automation & Control Theory (AREA)
- Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Power Engineering (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
Description
本発明は、ハイブリッド自動車に関し、詳しくは、エンジンと、動力を入出力可能な第1電動機と、エンジンの出力軸と第1電動機の回転軸と車軸に連結された駆動軸の3軸に3つの回転要素が接続された遊星歯車機構と、駆動軸に動力を入出力可能な第2電動機と、を備えるハイブリッド自動車に関する。
従来、この種のハイブリッド自動車としては、エンジンと2つのモータとを遊星歯車機構で接続した構成のハイブリッド自動車において、インバータの素子温度が所定温度以上になったときには、モータの負荷率を制限するものが提案されている(例えば、特許文献1参照)。このハイブリッド自動車では、モータの負荷率を制限することにより、インバータの素子温度の更なる上昇を抑制している。
しかしながら、上述のハイブリッド自動車では、インバータを冷却する冷却装置に異常が生じたときには、十分な退避走行を行なうことができない場合が生じる。退避走行としては、通常はモータ走行によることが多いが、インバータの素子温度が所定温度以上になると、モータの負荷率に制限が課され、走行することが困難になる。このため、インバータの冷却装置に異常が生じたときの対応が望まれる。
本発明のハイブリッド自動車は、インバータを冷却する冷却装置に異常が生じたときに、より適正に退避走行することを主目的とする。
本発明のハイブリッド自動車は、上述の主目的を達成するために以下の手段を採った。
本発明のハイブリッド自動車は、
エンジンと、
動力を入出力可能な第1電動機と、
前記第1電動機を駆動する第1インバータと、
前記エンジンの出力軸と前記第1電動機の回転軸と車軸に連結された駆動軸の3軸に3つの回転要素が接続された遊星歯車機構と、
前記駆動軸に動力を入出力可能な第2電動機と、
前記第2電動機を駆動する第2インバータと、
前記第1電動機および前記第2電動機と前記第1インバータおよび前記第2インバータを介して電力のやりとりを行なうバッテリと、
少なくとも前記第1インバータおよび前記第2インバータを冷却する冷却装置と、
を備えるハイブリッド自動車であって、
前記冷却装置に異常が生じているときには、前記第1電動機に負荷率制限を課す第1負荷率制限温度から前記第1インバータの素子温度を減じた第1温度差と、前記第2電動機に負荷率制限を課す第2負荷率制限温度から前記第2インバータの素子温度を減じた第2温度差と、前記バッテリの全蓄電容量に対する残存する蓄電容量の割合としての蓄電割合と、に基づいて、前記第2電動機からの動力を用いずに前記エンジンと前記第1電動機とからの動力で走行するよう前記エンジンと前記第1電動機と前記第2電動機とを制御する第1退避走行制御と、前記エンジンおよび前記第1電動機からの動力を用いずに前記第2電動機からの動力で走行するよう前記エンジンと前記第1電動機と前記第2電動機とを制御する第2退避走行制御と、を切り替えて実行する退避走行制御手段、
を備えることを特徴とする。
エンジンと、
動力を入出力可能な第1電動機と、
前記第1電動機を駆動する第1インバータと、
前記エンジンの出力軸と前記第1電動機の回転軸と車軸に連結された駆動軸の3軸に3つの回転要素が接続された遊星歯車機構と、
前記駆動軸に動力を入出力可能な第2電動機と、
前記第2電動機を駆動する第2インバータと、
前記第1電動機および前記第2電動機と前記第1インバータおよび前記第2インバータを介して電力のやりとりを行なうバッテリと、
少なくとも前記第1インバータおよび前記第2インバータを冷却する冷却装置と、
を備えるハイブリッド自動車であって、
前記冷却装置に異常が生じているときには、前記第1電動機に負荷率制限を課す第1負荷率制限温度から前記第1インバータの素子温度を減じた第1温度差と、前記第2電動機に負荷率制限を課す第2負荷率制限温度から前記第2インバータの素子温度を減じた第2温度差と、前記バッテリの全蓄電容量に対する残存する蓄電容量の割合としての蓄電割合と、に基づいて、前記第2電動機からの動力を用いずに前記エンジンと前記第1電動機とからの動力で走行するよう前記エンジンと前記第1電動機と前記第2電動機とを制御する第1退避走行制御と、前記エンジンおよび前記第1電動機からの動力を用いずに前記第2電動機からの動力で走行するよう前記エンジンと前記第1電動機と前記第2電動機とを制御する第2退避走行制御と、を切り替えて実行する退避走行制御手段、
を備えることを特徴とする。
この本発明のハイブリッド自動車では、第1インバータの素子温度が第1負荷率制限温度(第1温度差が値0)では第1電動機の負荷率に制限が課され、第2インバータの素子温度が第2負荷率制限温度(第2温度差が値0)では第2電動機の負荷率に制限が課される。一方、本発明のハイブリッド自動車では、退避走行制御としては、通常退避走行制御と第1退避走行制御と第2退避走行制御とを行なうことができる。通常退避走行制御では、通常の走行制御と同様に、エンジンと第1電動機と第2電動機とからの動力を用いて走行するようエンジンと第1電動機と第2電動機とを制御する。第1退避走行制御では、第2電動機からの動力を用いずにエンジンと第1電動機とからの動力で走行するようエンジンと第1電動機と第2電動機とを制御する。第2退避走行制御では、エンジンと第1電動機とからの動力を用いずに第2電動機からの動力で走行するようエンジンと第1電動機と第2電動機とを制御する。第1インバータや第2インバータを冷却する冷却装置に異常が生じているときに通常退避走行制御を実行すると、第1電動機も第2電動機も駆動制御されるため、第1インバータの素子と第2インバータの素子は同時に温度上昇し、比較的短時間で第1電動機と第2電動機とに対して負荷率制限が課される。しかし、本発明のハイブリッド自動車では、冷却装置に異常が生じているときには、通常退避走行制御ではなく、第1温度差と第2温度差とバッテリの蓄電割合とに基づいて第1退避走行制御と第2退避走行制御とを切り替える。第1退避走行制御を実行しているときには、第1電動機の駆動のために第1インバータの素子の温度は上昇するが、第2電動機からの動力を用いていないため第2インバータの素子の温度は上昇が抑制されるか降下する。一方、第2退避走行制御を実行しているときには、第2電動機の駆動のために第2インバータの素子の温度は上昇するが、第1電動機からの動力を用いていないため第1インバータの素子の温度は抑制されるか降下する。したがって、第1退避走行制御と第2退避走行制御とを切り替えて退避走行することにより、第1インバータの素子と第2インバータの素子とが同時に温度上昇して比較的短時間で第1電動機と第2電動機とに対して負荷率制限が課されるのを抑制することができ、退避走行距離を長くすることができる。この結果、より適正に退避走行することができる。
こうした本発明のハイブリッド自動車において、前記退避走行制御手段は、前記第1退避走行制御を実行している最中は前記第2インバータをシャットダウンし、前記第2退避走行制御を実行している最中は前記第1インバータをシャットダウンする手段であるものとしてもよい。こうすれば、第1退避走行制御を実行している最中に第2インバータの素子の温度を降下させることができ、第2退避走行制御を実行している最中に第1インバータの素子の温度を降下させることができる。このため、第1退避走行制御と第2退避走行制御とを交互に実行することができ、退避走行距離をより長くすることができる。
本発明のハイブリッド自動車において、前記退避走行制御手段は、前記蓄電割合が通常制御範囲の上限値より大きいときには、前記第2退避走行制御を前記第1退避走行制御に優先して実行する手段であるものとしてもよい。これは、第2退避走行制御はバッテリからの放電を伴って退避走行する制御であり、第1退避走行制御はバッテリの充電を伴って退避走行する制御であることに基づく。即ち、蓄電割合が通常制御範囲の上限値より大きいときには、バッテリからの放電を伴う第2退避走行制御を優先することにより、バッテリの蓄電割合を通常制御範囲に近づけることができると共に、バッテリが過充電になるのを抑制することができる。ここで、通常制御範囲としては、冷却装置などに異常が生じておらず、すべての機器が正常に動作する際に、バッテリの蓄電割合として予め定められた制御範囲であり、例えば、30%や40%などの下限値と50%や60%などの上限値とにより定められる範囲である。以下の「通常制御範囲」についても同様である。この態様の本発明のハイブリッド自動車において、前記退避走行制御手段は、前記蓄電割合が通常制御範囲の上限値より大きいときには、前記第1温度差が第1閾値に至るまでの前記第1退避走行制御と、前記第2温度差が前記第1閾値に至るまでの前記第2退避走行制御と、を切り替えて実行する手段であるものとしてもよい。即ち、退避走行を行なう際、まず、第2温度差が第1閾値に至るまでの第2退避走行制御を実行し、その後、第1温度差が第1閾値に至るまでの第1退避走行制御を実行し、その後、交互にこれを繰り返すのである。これにより、退避走行距離をより長くすることができる。ここで、第1閾値としては、値0を用いたり、5℃や10℃などを用いることができる。この場合、前記退避走行制御手段は、前記第1退避走行制御を実行している最中に前記蓄電割合が予め定めた許容最大値に至ったときには、前記第1温度差に拘わらずに前記第1退避走行制御から前記第2退避走行制御の実行に切り替える手段であるものとしてもよい。こうすれば、バッテリの蓄電割合が許容最大値を超える充電を回避することができる。
本発明のハイブリッド自動車において、前記退避走行制御手段は、前記蓄電割合が通常制御範囲内のときに前記第1温度差と前記第2温度差との一方が第2閾値より大きいときには、前記第2温度差が前記第2閾値に至るまでの前記第2退避走行制御と、前記第2温度差が前記第2閾値に至るまでの前記第1退避走行制御と、を切り替えて実行する手段であるものとしてもよい。ここで、第2閾値としては、10℃や20℃,30℃などを用いることができる。これにより、第1インバータの素子や第2インバータの素子の温度上昇に対してある程度の余裕をもって第1退避走行制御と第2退避走行制御とを切り替えることができると共に、バッテリの蓄電割合を通常制御範囲内により長く保持することができる。この態様の本発明のハイブリッド自動車において、前記退避走行制御手段は、前記蓄電割合が前記通常制御範囲内のときに前記第1温度差および前記第2温度差が前記第2閾値以下のときには、前記第2温度差が前記第2閾値より小さい第3閾値に至るまでの前記第1退避走行制御と、前記第2温度差が前記第3閾値に至るまでの前記第2退避走行制御と、を切り替えて実行する手段であるものとしてもよい。ここで、第3閾値としては、値0を用いたり、5℃や10℃などを用いることができる。これにより、バッテリの蓄電割合を通常制御範囲内により長く保持し、より長い退避走行を行なうことができる。
本発明のハイブリッド自動車において、前記退避走行制御手段は、前記蓄電割合が通常制御範囲の下限値より小さいときには、前記第1退避走行制御を前記第2退避走行制御に優先して実行する手段であるものとしてもよい。これは、第1退避走行制御はバッテリの充電を伴って退避走行する制御であり、第2退避走行制御はバッテリからの放電を伴って退避走行する制御であることに基づく。即ち、蓄電割合が通常制御範囲の下限値より小さいときには、バッテリの充電を伴う第1退避走行制御を優先することにより、バッテリが過放電になるのを抑制することができる。この態様の本発明のハイブリッド自動車において、前記退避走行制御手段は、前記蓄電割合が通常制御範囲の下限値より小さいときには、前記第1温度差が第4閾値に至るまでの前記第1退避走行制御と、前記第2温度差が前記第4閾値に至るまでの前記第2退避走行制御と、を切り替えて実行する手段であるものとしてもよい。即ち、退避走行を行なう際、まず、第1温度差が第4閾値に至るまでの第1退避走行制御を実行し、その後、第2温度差が第4閾値に至るまでの第2退避走行制御を実行し、その後、交互にこれを繰り返すのである。これにより、退避走行距離をより長くすることができる。ここで、第4閾値としては、値0を用いたり、5℃や10℃などを用いることができる。この場合、前記退避走行制御手段は、前記第2退避走行制御を実行している最中に前記蓄電割合が予め定めた許容最小値に至ったときには、前記第2温度差に拘わらずに前記第2退避走行制御から前記第1退避走行制御の実行に切り替える手段であるものとしてもよい。こうすれば、バッテリの蓄電割合が許容最小値を超える放電を回避することができる。
次に、本発明を実施するための形態を実施例を用いて説明する。
図1は、本発明の一実施例としてのハイブリッド自動車20の構成の概略を示す構成図である。実施例のハイブリッド自動車20は、図示するように、エンジン22と、エンジン用電子制御ユニット(以下、エンジンECUという)24と、プラネタリギヤ30と、モータMG1と、モータMG2と、インバータ41,42と、モータ用電子制御ユニット(以下、モータECUという)40と、バッテリ50と、バッテリ用電子制御ユニット(以下、バッテリECUという)52と、昇圧コンバータ56と、HVユニット冷却装置60と、ハイブリッド用電子制御ユニット(以下、HVECUという)70と、を備える。
エンジン22は、一般的なガソリンや軽油などを燃料として動力を出力する内燃機関として構成されており、エンジンECU24により駆動制御される。エンジンECU24は、図示しないが、CPUを中心とするマイクロプロセッサとして構成されており、CPUの他に、処理プログラムを記憶するROMやデータを一時的に記憶するRAM,入出力ポート,通信ポートを備える。エンジンECU24には、エンジン22の運転状態を検出する各種センサから信号、例えば、クランクシャフト26の回転位置を検出するクランクポジションセンサからのクランクポジションθcrやエンジン22の冷却水の温度を検出する水温センサからの冷却水温Twe,吸気バルブや排気バルブを開閉するカムシャフトの回転位置を検出するカムポジションセンサからのカムポジションθca,スロットルバルブのポジションを検出するスロットルバルブポジションセンサからのスロットルポジションTP,吸気管に取り付けられたエアフローメータからの吸入空気量Qa,同じく吸気管に取り付けられた温度センサからの吸気温Taなどが入力ポートを介して入力されている。エンジンECU24からは、エンジン22を駆動するための種々の制御信号、例えば、燃料噴射弁への駆動信号やスロットルバルブのポジションを調節するスロットルモータへの駆動信号,イグナイタと一体化されたイグニッションコイルへの制御信号,VVT23への制御信号などが出力ポートを介して出力されている。また、エンジンECU24は、HVECU70と通信しており、HVECU70からの制御信号によりエンジン22を運転制御すると共に必要に応じてエンジン22の運転状態に関するデータをHVECU70に出力する。なお、エンジンECU24は、クランクシャフト26に取り付けられた図示しないクランクポジションセンサからの信号に基づいてクランクシャフト26の回転数、即ちエンジン22の回転数Neも演算している。
プラネタリギヤ30は、シングルピニオン式の遊星歯車機構として構成されている。プラネタリギヤ30のサンギヤ,リングギヤ,キャリアには、モータMG1の回転子,駆動輪38a,38bにデファレンシャルギヤ37を介して連結された駆動軸36,エンジン22のクランクシャフト26がそれぞれ接続されている。
モータMG1は、永久磁石が埋め込まれた回転子と三相コイルが巻回された固定子とを備える周知の同期発電電動機として構成されており、上述したように回転子がプラネタリギヤ30のサンギヤに接続されている。モータMG2は、モータMG1と同様に同期発電電動機として構成されており、回転子が駆動軸36に接続されている。モータMG1,MG2は、モータECU40によってインバータ41,42を制御することにより駆動する。インバータ41,42は、電力ライン(以下、駆動電圧系電力ラインという。)54aによりバッテリ50とシステムメインリレー55が接続された電力ライン(以下、電池電圧系電力ラインという。)54bに接続された昇圧コンバータ56に接続されている。インバータ41,42は、図示しないが、各々6つのトランジスタと6つのダイオードとによる周知のインバータとして構成されている。
昇圧コンバータ56は、図示しないが、2つのトランジスタと2つのダイオードとリアクトルとからなる周知のDC/DCコンバータとして構成されており、電池電圧系電力ライン54bの電力を昇圧して駆動電圧系電力ライン54aに供給したり、駆動電圧系電力ライン54aの電力を降圧して電池電圧系電力ライン54bに供給したりすることができる。駆動電圧系電力ライン54aには、平滑用の平滑コンデンサ57と放電用の放電抵抗59とが並列に接続されている。また、電池電圧系電力ライン54bのバッテリ50の出力端子側にはシステムメインリレー55が取り付けられており、さらに、電池電圧系電力ライン54bの昇圧コンバータ56側には、平滑用のフィルタコンデンサ58が接続されている。
モータECU40は、図示しないが、CPUを中心とするマイクロプロセッサとして構成されており、CPUの他に、処理プログラムを記憶するROMやデータを一時的に記憶するRAM,入出力ポート,通信ポートを備える。モータECU40には、モータMG1,MG2を駆動制御するために必要な信号が入力ポートを介して入力されている。入力ポートを介して入力される信号としては以下のものを挙げることができる。モータMG1,MG2の回転子の回転位置を検出する回転位置検出センサ43,44からの回転位置θm1,θm2。モータMG1,MG2に取り付けられた温度センサ45,46からのモータ温度Tmg。図示しない電流センサにより検出されるモータMG1,MG2に印加される相電流。平滑コンデンサ57の端子間に取り付けられた図示しない電圧センサからの平滑コンデンサ57の電圧(駆動電圧系電力ライン54aの電圧。以下、駆動電圧系電圧という。)VH。フィルタコンデンサ58の端子間に取り付けられた図示しない電圧センサからのフィルタコンデンサ58の電圧(電池電圧系電力ライン54bの電圧。以下、電池電圧系電圧という)VL。インバータ41,42に取り付けられた温度センサ41a,42aからのトランジスタやダイオードなどの素子温度Ts1,Ts2。モータECU40からは、インバータ41,42へのスイッチング制御信号や昇圧コンバータ56へのスイッチング制御信号などが出力ポートを介して出力されている。また、モータECU40は、HVECU70と通信しており、HVECU70からの制御信号によってモータMG1,MG2を駆動制御すると共に必要に応じてモータMG1,MG2の運転状態に関するデータをHVECU70に出力する。なお、モータECU40は、回転位置検出センサ43,44からのモータMG1,MG2の回転子の回転位置θm1,θm2に基づいてモータMG1,MG2の回転数Nm1,Nm2も演算している。
実施例では、主としてインバータ41,42と昇圧コンバータ55とモータECU24とを同一の筐体に収納しており、これらによりパワーコントロールユニット(以下、PCUという。)48を構成している。
バッテリ50は、例えばリチウムイオン二次電池として構成されてインバータ41,42を介してモータMG1,MG2と電力をやりとりする。バッテリ50を管理するバッテリECU52は、図示しないが、CPUを中心とするマイクロプロセッサとして構成されており、CPUの他に、処理プログラムを記憶するROMやデータを一時的に記憶するRAM,入出力ポート,通信ポートを備える。バッテリECU52には、バッテリ50を管理するのに必要な信号が入力ポートを介して入力されており、必要に応じてバッテリ50の状態に関するデータを通信によりHVECU70に送信する。入力ポートを介して入力される信号としては、例えば、バッテリ50の端子間に設置された図示しない電圧センサからの端子間電圧Vbやバッテリ50の出力端子に接続された電力ラインに取り付けられた図示しない電流センサからの充放電電流Ib,バッテリ50に取り付けられた図示しない温度センサからの電池温度Tbなどを挙げることができる。また、バッテリECU52は、バッテリ50を管理するために、電流センサにより検出された充放電電流Ibの積算値に基づいてそのときのバッテリ50から放電可能な電力の容量の全容量に対する割合である蓄電割合SOCを演算したり、演算した蓄電割合SOCと電池温度Tbとに基づいてバッテリ50を充放電してもよい最大許容電力である入出力制限Win,Woutを演算したりしている。
HVユニット冷却装置60は、冷却水(LLC(ロングライフクーラント))と外気との熱交換を行なうラジエータ62と、ラジエータ62,PCU48と、モータMG1,MG2とにこの順に冷却水を循環させる循環流路64と、冷却水を圧送する電動ポンプ66と、を備える。ラジエータ62は、図示しないエンジンルームの最前部に配置されている。PCU48内では、インバータ41,42や昇圧コンバータ56に冷却水流路が配設されており、これらが冷却されるようになっている。
HVECU70は、図示しないが、CPUを中心とするマイクロプロセッサとして構成されており、CPUの他に、処理プログラムを記憶するROMやデータを一時的に記憶するRAM,入出力ポート,通信ポートを備える。HVECU70には各種制御信号が入力ポートを介して入力されている。入力ポートを介して入力される信号としては以下のものを挙げることができる。HVユニット冷却装置60の電動ポンプ66の回転数を検出する回転数センサ66aからのポンプ回転数Np。HVユニット冷却装置60の冷却水の温度を検出する温度センサ69からのHVユニット水温Thv。イグニッションスイッチ80からのイグニッション信号。シフトレバー81の操作位置を検出するシフトポジションセンサ82からのシフトポジションSP。アクセルペダル83の踏み込み量を検出するアクセルペダルポジションセンサ84からのアクセル開度Acc。ブレーキペダル85の踏み込み量を検出するブレーキペダルポジションセンサ86からのブレーキペダルポジションBP。車速センサ88からの車速V。また、HVECU70からは、システムメインリレー55への駆動信号や、HVユニット冷却装置60の電動ポンプ66への制御信号への駆動信号などが出力ポートを介して出力されている。HVECU70は、前述したように、エンジンECU24やモータECU40,バッテリECU52と通信ポートを介して接続されており、エンジンECU24やモータECU40,バッテリECU52と各種制御信号やデータのやりとりを行なっている。
こうして構成された実施例のハイブリッド自動車20は、運転者によるアクセルペダル83の踏み込み量に対応するアクセル開度Accと車速Vとに基づいて駆動軸36に出力すべき要求トルクを計算し、この要求トルクに対応する要求動力が駆動軸36に出力されるように、エンジン22とモータMG1とモータMG2とが運転制御される。エンジン22とモータMG1とモータMG2の運転制御としては以下の(1)〜(3)のものがある。
(1)トルク変換運転モード:要求動力に見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にエンジン22から出力される動力のすべてがプラネタリギヤ30とモータMG1とモータMG2とによってトルク変換されて駆動軸36に出力されるようモータMG1およびモータMG2を駆動制御する運転モード。
(2)充放電運転モード:要求動力とバッテリ50の充放電に必要な電力との和に見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にバッテリ50の充放電を伴ってエンジン22から出力される動力の全部またはその一部がプラネタリギヤ30とモータMG1とモータMG2とによるトルク変換を伴って要求動力が駆動軸36に出力されるようモータMG1およびモータMG2を駆動制御する運転モード。
(3)モータ運転モード:エンジン22の運転を停止してモータMG2からの要求動力に見合う動力を駆動軸36に出力するよう運転制御する運転モード。
(1)トルク変換運転モード:要求動力に見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にエンジン22から出力される動力のすべてがプラネタリギヤ30とモータMG1とモータMG2とによってトルク変換されて駆動軸36に出力されるようモータMG1およびモータMG2を駆動制御する運転モード。
(2)充放電運転モード:要求動力とバッテリ50の充放電に必要な電力との和に見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にバッテリ50の充放電を伴ってエンジン22から出力される動力の全部またはその一部がプラネタリギヤ30とモータMG1とモータMG2とによるトルク変換を伴って要求動力が駆動軸36に出力されるようモータMG1およびモータMG2を駆動制御する運転モード。
(3)モータ運転モード:エンジン22の運転を停止してモータMG2からの要求動力に見合う動力を駆動軸36に出力するよう運転制御する運転モード。
次に、こうして構成された実施例のハイブリッド自動車20の動作、特にHVユニット冷却装置60に異常が生じたときの退避走行の際の動作について説明する。図2は、HVECU70により実行される冷却系異常時退避走行制御の一例を示すフローチャートである。このルーチンは所定時間毎(例えば、100msec毎など)に繰り返し実行される。
冷却系異常時退避走行制御が実行されると、HVECU70は、まず、バッテリ50の蓄電割合SOCやインバータ41,42の素子温度Ts1,Ts2などのデータを入力する処理を実行する(ステップS100)。ここで、バッテリ50の蓄電割合SOCについては、バッテリECU52により演算したものを受信することにより入力することができる。また、インバータ41,42の素子温度Ts1,Ts2については、温度センサ41a,42aにより検出されたものをモータECU40から受信することにより入力することができる。
次に、予め定められた第1負荷率制限温度Tset1,第2負荷率制限温度Tset2から入力した素子温度Ts1,Ts2を減じて第1温度差ΔTs1,第2温度差ΔTs2を計算する(ステップS110)。ここで、第1負荷率制限温度Tset1は、モータMG1の負荷率に制限を課すインバータ41の素子温度であり、例えば負荷率に20%の制限を課す温度や負荷率に50%の制限を課す温度、負荷率に80%の制限を課す温度などを用いることができる。第2負荷率制限温度Tset2は、モータMG2の負荷率に制限を課すインバータ44の素子温度であり、例えば負荷率に5%の制限を課す温度や20%の制限を課す温度、負荷率に50%の制限を課す温度、負荷率に80%の制限を課す温度などを用いることができる。
続いて、バッテリ50の蓄電割合SOCを閾値S1から閾値S2の異常が生じていない通常時の制御目標の範囲(以下、「通常制御範囲」という。)内であるか否かを判定する(ステップS120)。ここで、通常制御範囲の下限値としての閾値S1としては、例えば30%や40%、50%などを用いることができる。また、通常制御範囲の上限値としての閾値S2としては閾値S1より大きく、例えば50%や60%、70%などを用いることができる。バッテリ50の蓄電割合SOCが通常制御範囲の上限値より大きいときには、ステップS110で計算した第1温度差ΔTs1,第2温度差ΔTs2を用いて高SOC範囲退避走行制御を実行して(ステップS130)、本制御を終了する。バッテリ50の蓄電割合SOCが通常制御範囲内のときには、同様に第1温度差ΔTs1,第2温度差ΔTs2を用いて通常SOC範囲退避走行制御を実行して(ステップS140)、本制御を終了する。バッテリ50の蓄電割合SOCが通常制御範囲の下限値より小さいときには、同様に第1温度差ΔTs1,第2温度差ΔTs2を用いて低SOC範囲退避走行制御を実行して(ステップS150)、本制御を終了する。高SOC範囲退避走行制御の一例を図3に示し、通常SOC範囲退避走行制御の一例を図4に示し、低SOC範囲退避走行制御の一例を図5に示す。以下、高SOC範囲退避走行制御、通常SOC範囲退避走行制御、低SOC範囲退避走行制御について順に説明するが、これらの説明に先立って、各制御で用いられる第1退避走行制御と第2退避走行制御について説明する。
第1退避走行制御は、モータMG2からの動力を用いずにエンジン22とモータMG1とからの動力により走行するようエンジン22とモータMG1とモータMG2とを制御する制御である。第2退避走行制御は、エンジン22とモータMG1とからの動力を用いずにモータMG2からの動力により走行するようエンジン22とモータMG1とモータMG2とを制御する制御である。図6に第1退避走行制御を実行している状態の共線図を示し、図7に第2退避走行制御を実行している状態の共線図を示す。図中、左のS軸はモータMG1の回転数Nm1であるサンギヤの回転数を示し、C軸はエンジン22の回転数Neであるキャリヤの回転数を示し、R軸はモータMG2の回転数Nm2であるリングギヤ(駆動軸36)の回転数Nrを示す。また、図中、R軸上の太線矢印は、モータMG1から出力されてプラネタリギヤ30を介して駆動軸36に作用するトルクや、モータMG2から出力されて駆動軸36に作用するトルクを示す。「ρ」は、プラネタリギヤ30のギヤ比(サンギヤの歯数/リングギヤの歯数)である。第1退避走行制御では、図6に示すように、エンジン22からのトルクTeをモータMG1のトルクTm1で受けることにより、駆動軸36には反力としてのトルク(−Tm1/ρ)が出力されるから、この反力としてのトルクにより走行する。第1退避走行制御では、モータMG1は発電機として機能するから、バッテリ50の充電を伴って走行することになる。実施例では、第1退避走行制御では、インバータ42をシャットダウンするものとした。モータMG2に対して値0のトルクとなるようにインバータ42を制御することもできるが、この場合、トランジスタに電流が流れて素子の温度を上昇させる。インバータ42をシャットダウンするのは、インバータ42の素子の温度上昇を抑制するためである。第2退避走行制御では、図7に示すように、モータMG2からのトルクTm2により走行する。このため、バッテリ50からの放電を伴って走行することになる。実施例では、第2退避走行制御では、インバータ41をシャットダウンするものとした。モータMG1に対して値0のトルクとなるようにインバータ41を制御することもできるが、この場合、トランジスタに電流が流れて素子の温度を上昇させる。インバータ41をシャットダウンするのは、インバータ41の素子の温度上昇を抑制するためである。なお、エンジン22については、アイドリング回転数で自立運転(アイドル運転)するものとした。なお、実施例のハイブリッド自動車20では、退避走行制御として第1退避走行制御と第2退避走行制御の他に、トルク変換運転モードや充放電運転モードを用いてエンジン22とモータMG1とモータMG2とからの動力を用いて走行する通常退避走行制御がある。この通常退避走行制御は、モータMG1とモータMG2とを駆動するから、HVユニット冷却装置60に異常が生じているときには、インバータ41,42の素子が早期に上昇してしまう。
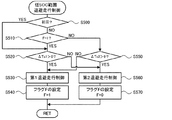
図3に示す高SOC範囲退避走行制御について説明する。高SOC範囲退避走行制御では、まず、フラグFの値を調べる(ステップS200)。ここで、フラグFは、初期値が値0で、第1退避走行制御を実行する際に値1がセットされ、第2退避走行制御を実行する際に値0がセットされるフラグである。フラグFが値0のときには、第2温度差ΔTs2が値0より大きいか否かを判定し(ステップS210)、第2温度差ΔTs2が値0より大きいと判定したときには第2退避走行制御を選択し(ステップS220)、フラグFに値0をセットして(ステップS230)、本制御を終了する。第2退避走行制御が選択されると、HVECU70は、運転者のアクセルペダル83の操作などに基づいて第2退避走行制御を実行する。いま、HVユニット冷却装置60に異常が生じ、始めて図2の冷却系異常時退避走行制御が実行され、蓄電割合SOCが通常制御範囲の上限値より大きいと判定されたときを考える。この場合、フラグFは初期値の値0であるから、第2温度差ΔTs2が値0より大きいときには第2退避走行制御が選択されることになる。第2温度差ΔTs2は、第2負荷率制限温度Tset2からインバータ42の素子温度Ts2を減じたものであるから、HVユニット冷却装置60に異常が生じたときには、通常は第2温度差ΔTs2が値0より大きい。したがって、蓄電割合SOCが通常制御範囲の上限値より大きい状態でHVユニット冷却装置60に異常が生じると、第2退避走行制御が優先的に選択されることになる。これは、第2退避走行制御ではバッテリ50の放電を伴って走行することに基づく。第1退避走行制御を優先的に選択すると、第1退避走行制御ではバッテリ50の充電を伴って走行するため、蓄電割合SOCが更に大きくなり、バッテリ50が過充電される恐れが生じる。従って、第2退避走行制御を優先的に選択することにより、バッテリ50の過充電を抑制することができる。こうして、高SOC範囲退避走行制御を終了し、再び図2の冷却系異常時退避走行制御が実行されて蓄電割合SOCが通常制御範囲の上限値より大きいと判定されると、再び高SOC範囲退避走行制御が実行される。このとき、フラグFには値0がセットされているから、第2温度差ΔTs2が値0より大きければ、第2退避走行制御を選択する。即ち、蓄電割合SOCが通常制御範囲の上限値より大きい状態では、第2温度差ΔTs2が値0に至るまで第2退避走行制御を継続して実行することになる。
蓄電割合SOCが通常制御範囲の上限値より大きい状態で第2温度差ΔTs2が値0に至ると、ステップS210で否定的判定がなされる。この場合、第1退避走行制御を選択し(ステップS250)、フラグFに値1をセットして(ステップS260)、本制御を終了する。即ち、第2退避走行制御から第1退避走行制御に切り替えるのである。第1退避走行制御が選択されると、HVECU70は、運転者のアクセルペダル83の操作などに基づいて第1退避走行制御を実行する。この状態で、再び高SOC範囲退避走行制御が実行されると、ステップS200でフラグFが値1であるために否定的判定がなされ、第1温度差ΔTs1が値0より大きいか否かの判定がなされる(ステップS240)。第2退避走行制御を継続して実行している最中は、インバータ41はシャットダウンされているから、インバータ41の素子温度Ts1は第1負荷率制限温度Tset1より低くなる。このため、その差としての第1温度差ΔTs1は値0より大きくなる。この結果、ステップS240では肯定的判定がなされ、第1退避走行制御を選択する。即ち、第1退避走行制御を選択すると、蓄電割合SOCが通常制御範囲の上限値より大きい状態では、第1温度差ΔTs1が値0に至るまで第1退避走行制御を継続して実行することになる。
そして、第1退避走行制御を継続して実行している最中に第1温度差ΔTs1が値0に至ると、ステップS240で否定的判定がなされ、第2退避走行制御を選択し(ステップS220)、フラグFに値0をセットして(ステップS230)、本制御を終了する。即ち、第1退避走行制御から第2退避走行制御に切り替えるのである。このとき、第2温度差ΔTs2は、第1退避走行制御を継続して実行している最中は、インバータ42はシャットダウンされているから、インバータ42の素子はある程度冷却され、第2温度差ΔTs2は値0より大きくなる。従って、その後、第2温度差ΔTs2が値0に至るまで第2退避走行制御を継続して選択する。以上の説明から、蓄電割合SOCが通常制御範囲の上限値より大きい状態では、まず、第2退避走行制御が選択され、第2温度差ΔTs2が値0に至るまでの第2退避走行制御と第1温度差ΔTs1が値0に至るまでの第1退避走行制御とが交互に切り替えられて退避走行する。第1退避走行制御を実行しているときにはインバータ42の素子はある程度冷却され、第2退避走行制御を実行しているときにはインバータ41の素子はある程度冷却されるから、第1退避走行制御と第2退避走行制御とを切り替えて交互に実行することにより、退避走行距離をより長くすることができる。
次に、図4に示す通常SOC範囲退避走行制御について説明する。通常SOC範囲退避走行制御では、まず、第1温度差ΔTs1と第2温度差ΔTs2が閾値Trefより大きいか否かを判定する(ステップS300)。ここで、閾値Trefは、インバータ41,42の素子温度Ts1,Ts2が第1負荷率制限温度Tset1,第2負荷率制限温度Tset2に対してある程度の余裕を持つための閾値として設定されるものであり、例えば10℃や15℃,20℃,25℃などを用いることができる。第1温度差ΔTs1と第2温度差ΔTs2との少なくとも一方が閾値Trefより大きいときには、フラグFの値を調べ(ステップS310)、フラグFが値0のときには第2温度差ΔTs2が閾値Trefより大きいか否かを判定し(ステップS320)、フラグFが値1のときには第1温度差ΔTs1が閾値Trefより大きいか否かを判定する(ステップS350)。いま、HVユニット冷却装置60に異常が生じ、始めて図2の冷却系異常時退避走行制御が実行され、蓄電割合SOCが通常制御範囲内と判定されたときであって、第1温度差ΔTs1と第2温度差ΔTs2との双方が閾値Trefより大きいときを考える。この場合、フラグFには初期値として値0がセットされているから、ステップS310で否定的判定がなされる。このため、ステップS320で第2温度差ΔTs2が閾値Trefより大きいと判定されるから、第2退避走行制御を選択し(ステップS330)、フラグFに値0をセットして(ステップS340)、本制御を終了する。再び図2の冷却系異常時退避走行制御が実行されて蓄電割合SOCが通常制御範囲内であると判定されると、再び通常SOC範囲退避走行制御が実行される。このとき、フラグFは値0と判定され、第2温度差ΔTs2が閾値Trefより大きければ、第2退避走行制御を選択する。即ち、蓄電割合SOCが通常制御範囲内の状態では、まず、第2温度差ΔTs2が閾値Trefに至るまで第2退避走行制御を継続して実行することになる。
こうして第2退避走行制御を継続して実行している最中に第2温度差ΔTs2が閾値Trefに至ると、ステップS320で否定的判定がなされる。すると、第1退避走行制御を選択し(ステップS360)、フラグFに値1をセットして(ステップS370)、本制御を終了する。即ち、第2退避走行制御から第1退避走行制御に切り替えるのである。この状態で、再び通常SOC範囲退避走行制御が実行されると、いま第1温度差ΔTs1と第2温度差ΔTs2との双方が閾値Trefより大きかったときを考えているから、第1温度差ΔTs1が閾値Trefより大きいためにステップS300で肯定的判定がなされる。そして、フラグFに値1がセットされたことによりステップS310で否定的判定がなされるから、ステップS360で再び第1退避走行制御を選択することになる。即ち、第1退避走行制御が選択されると、蓄電割合SOCが通常制御範囲内の状態では、第1温度差ΔTs1が閾値Trefに至るまで第1退避走行制御を継続して実行することになる。
そして、第1退避走行制御を継続して実行している最中に第1温度差ΔTs1が閾値Trefに至ると、ステップS350で否定的判定がなされ、第2退避走行制御を選択し(ステップS330)、フラグFに値0をセットして(ステップS340)、本制御を終了する。即ち、第1退避走行制御から第2退避走行制御に切り替えるのである。このとき、第2温度差ΔTs2は、第1退避走行制御を継続して実行している最中に、インバータ42の素子はある程度冷却されるため、第2温度差ΔTs2は閾値Trefより大きくなる。従って、その後、第2温度差ΔTs2が閾値Trefに至るまで第2退避走行制御が継続して選択される。これらのことから、蓄電割合SOCが通常制御範囲内の状態で第1温度差ΔTs1と第2温度差ΔTs2との少なくとも一方が閾値Trefより大きいときには、まず、第2退避走行制御を選択し、第2温度差ΔTs2が閾値Trefに至るまでの第2退避走行制御と第1温度差ΔTs1が閾値Trefに至るまでの第1退避走行制御とを交互に切り替えて退避走行することになる。第1退避走行制御を実行しているときにはインバータ42の素子はある程度冷却され、第2退避走行制御を実行しているときにはインバータ41の素子はある程度冷却されるから、第1退避走行制御と第2退避走行制御とを切り替えて交互に実行することにより、退避走行距離をより長くすることができる。
一方、ステップS300で第1温度差ΔTs1と第2温度差ΔTs2との双方が閾値Tref以下であると判定されると、この判定(第1温度差ΔTs1と第2温度差ΔTs2との双方が閾値Tref以下であるとの判定)が初回であるか否かを判定する(ステップS380)。初回であると判定されたときには、第1温度差ΔTs1が第2温度差ΔTs2より大きいか否かを判定し(ステップS390)、第1温度差ΔTs1が第2温度差ΔTs2より大きいときには、第1退避走行制御を選択し(ステップS360)、フラグFに値1をセットして(ステップS370)、本制御を終了する。第1温度差ΔTs1が第2温度差ΔTs2以下のときには、第2退避走行制御を選択し(ステップS330)、フラグFに値0をセットして(ステップS340)、本制御を終了する。そして、再び通常SOC範囲退避走行制御が実行されステップS300で第1温度差ΔTs1と第2温度差ΔTs2との双方が閾値Tref以下であると判定されると、ステップS380では初回ではないと判定される。この場合、フラグFが値0であるか否かが判定される(ステップS400)。ステップS380,S390の処理で第2退避走行制御が選択されてフラグFに値0がセットされたとき(ステップS330,S340)には、ステップS400で肯定的判定がなされ、第2温度差ΔTs2が値0より大きいか否かが判定される(ステップS410)。そして、第2温度差ΔTs2が値0より大きいときには、第2退避走行制御を選択し(ステップS330)、フラグFに値0をセットして(ステップS340)、本制御を終了する。したがって、高SOC範囲退避走行制御と同様に、第2温度差ΔTs2が値0に至るまで第2退避走行制御を継続して実行する。ステップS380,S390の処理で第1退避走行制御が選択されてフラグFに値1がセットされたとき(ステップS360,S370)には、フラグFが値1であるからステップS400で否定的判定がなされ、第1温度差ΔTs1が値0より大きいか否かが判定される(ステップS420)。そして、第1温度差ΔTs1が値0より大きいときには、第1退避走行制御を選択し(ステップS360)、フラグFに値1をセットして(ステップS370)、本制御を終了する。したがって、高SOC範囲退避走行制御と同様に、第1温度差ΔTs1が値0に至るまで第1退避走行制御を継続して実行する。
以上の説明から、ステップS300で第1温度差ΔTs1と第2温度差ΔTs2との双方が閾値Tref以下であると判定されたときには、第1温度差ΔTs1が第2温度差ΔTs2より大きいときには第1退避走行制御を選択し、第1温度差ΔTs1が第2温度差ΔTs2以下のときには第2退避走行制御を選択する。そして、最初に選択した退避走行制御から順に、第1温度差ΔTs1が値0に至るまでの第1退避走行制御と第2温度差ΔTs2が値0に至るまでの第2退避走行制御とを交互に切り替えて退避走行する。第1退避走行制御を実行しているときにはインバータ42の素子はある程度冷却され、第2退避走行制御を実行しているときにはインバータ41の素子はある程度冷却されるから、第1退避走行制御と第2退避走行制御とを切り替えて交互に実行することにより、退避走行距離をより長くすることができる。
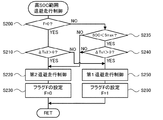
次に、図5に示す低SOC範囲退避走行制御について説明する。低SOC範囲退避走行制御では、まず、この制御の実行が初回であるか否かを判定する(ステップS500)。低SOC範囲退避走行制御の初回の実行のときには、第1温度差ΔTs1が値0より大きいか否かを判定する(ステップS520)。初回であるときには通常は第1温度差ΔTs1が値0より大きいから、ステップS520では肯定的判定がなされる。そして、第1退避走行制御を選択し(ステップS530)、フラグFに値1をセットして(ステップS540)、本制御を終了する。再び低SOC範囲退避走行制御が実行されたときには、ステップS500では否定的判定がなされるから、フラグFが値1であるか否かを判定する(ステップS510)。第1退避走行制御が選択されてフラグFには値1がセットされているから、ステップS510では肯定的判定がなされ、第1温度差ΔTs1が値0より大きいか否かを判定し(ステップS520)、第1温度差ΔTs1が値0より大きいときには、第1退避走行制御を選択し(ステップS530)、フラグFに値1をセットして(ステップS540)、本制御を終了する。したがって、低SOC範囲退避走行制御では、まず、第1退避走行制御を選択し、第1温度差ΔTs1が値0に至るまで第1退避走行制御を継続して実行する。即ち、優先的に第1退避走行制御を選択するのである。これは、第1退避走行制御ではバッテリ50の充電を伴って走行することに基づく。第2退避走行制御を優先的に選択すると、第2退避走行制御ではバッテリ50の放電を伴って走行するため、蓄電割合SOCが更に小さくなり、バッテリ50が過放電される恐れが生じる。従って、第1退避走行制御を優先的に選択することにより、バッテリ50の過放電を抑制することができる。
蓄電割合SOCが通常制御範囲の下限値より小さい状態で第1温度差ΔTs1が値0に至ると、ステップS520で否定的判定がなされる。この場合、第2退避走行制御を選択し(ステップS560)、フラグFに値0をセットして(ステップS570)、本制御を終了する。即ち、第1退避走行制御から第2退避走行制御に切り替えるのである。この状態で、再び低SOC範囲退避走行制御が実行されると、ステップS510でフラグFが値0であるために否定的な判定がなされ、第2温度差ΔTs2が値0より大きいか否かの判定がなされる(ステップS550)。第1退避走行制御が継続して実行している最中にインバータ42の素子はある程度冷却されるため、第2温度差ΔTs2は値0より大きくなる。この結果、ステップS550では肯定的判定がなされ、第2退避走行制御が選択される。即ち、第2退避走行制御を選択すると、蓄電割合SOCが通常制御範囲の下限値より小さい状態では、第2温度差ΔTs1が値0に至るまで第2退避走行制御が継続して実行することになる。
そして、第2退避走行制御を継続して実行している最中に第2温度差ΔTs2が値0に至ると、ステップS550で否定的判定がなされ、第1退避走行制御を選択し(ステップS530)、フラグFに値1をセットして(ステップS540)、本制御を終了する。即ち、第2退避走行制御から第1退避走行制御に切り替えるのである。このとき、第1温度差ΔTs1は、第2退避走行制御が継続して実行している最中にインバータ41の素子はある程度冷却されるため、第1温度差ΔTs1は値0より大きくなる。従って、その後、第1温度差ΔTs1が値0に至るまで第1退避走行制御を継続して選択することになる。以上の説明から、蓄電割合SOCが通常制御範囲の下限値より小さい状態では、まず、第1退避走行制御を選択し、第1温度差ΔTs1が値0に至るまでの第1退避走行制御と第2温度差ΔTs2が値0に至るまでの第2退避走行制御とを交互に切り替えて退避走行する。第1退避走行制御を実行しているときにはインバータ42の素子はある程度冷却され、第2退避走行制御を実行しているときにはインバータ41の素子はある程度冷却されるから、第1退避走行制御と第2退避走行制御とを切り替えて交互に実行することにより、退避走行距離をより長くすることができる。
以上説明した実施例のハイブリッド自動車20では、HVユニット冷却装置60に異常が生じているときには、バッテリ50の蓄電割合SOCと、第1負荷率制限温度Tset1からインバータ41の素子温度Ts1を減じた第1温度差ΔTs1と、第2負荷率制限温度Tset2からインバータ42の素子温度Ts2を減じた第2温度差ΔTs2と、に基づいて第1退避走行制御と第2退避走行制御とを切り替えて退避走行する。第1退避走行制御により退避走行しているときには、インバータ41の素子温度Ts1は上昇するが、シャットダウンされているインバータ42の素子の温度Ts2はある程度降下する。一方、第2退避走行制御により退避走行しているときには、インバータ42の素子温度Ts2は上昇するが、シャットダウンされているインバータ41の素子の温度Ts2はある程度降下する。したがって、第1退避走行制御と第2退避走行制御とを切り替えて退避走行することにより、インバータ41の素子とインバータ42の素子とが同時に温度上昇して比較的短時間でモータMG1とモータMG2とに対して負荷率制限が課されて退避走行できなくなるのを抑制することができ、退避走行距離を長くすることができる。この結果、より適正に退避走行することができる。
実施例のハイブリッド自動車20では、HVユニット冷却装置60に異常が生じているときにバッテリ50の蓄電割合SOCが通常制御範囲の上限値より大きいときには、バッテリ50の放電を伴って退避走行する第2退避走行制御を優先的に選択する。これにより、バッテリ50の過充電を抑制することができる。しかも、第2温度差ΔTs2が値0に至るまでの第2退避走行制御と第1温度差ΔTs1が値0に至るまでの第1退避走行制御とを交互に切り替えて退避走行するから、退避走行距離をより長くすることができる。
実施例のハイブリッド自動車20では、HVユニット冷却装置60に異常が生じているときにバッテリ50の蓄電割合SOCが通常制御範囲内のときであって、第1温度差ΔTs1と第2温度差ΔTs2との少なくとも一方が閾値Trefより大きいときには、第2退避走行制御を選択し、第2温度差ΔTs2が閾値Trefに至るまでの第2退避走行制御と第1温度差ΔTs1が閾値Trefに至るまでの第1退避走行制御とが交互に切り替えられて退避走行する。これにより、インバータ41,42の素子温度Ts1,Ts2が第1負荷率制限温度Tset1,第2負荷率制限温度Tset2に余裕をもった状態で、退避走行距離をより長くすることができる。しかも、第1温度差ΔTs1と第2温度差ΔTs2との双方が閾値Tref以下のときには、第1温度差ΔTs1が第2温度差ΔTs2より大きいときには第1退避走行制御を選択し、第1温度差ΔTs1が第2温度差ΔTs2以下のときには第2退避走行制御を選択する。そして、最初に選択した退避走行制御から順に、第1温度差ΔTs1が値0に至るまでの第1退避走行制御と第2温度差ΔTs2が値0に至るまでの第2退避走行制御とを交互に切り替えて退避走行する。これにより、退避走行制御の頻繁な切り替えを抑制し、退避走行距離をより長くすることができる。
実施例のハイブリッド自動車20では、HVユニット冷却装置60に異常が生じているときにバッテリ50の蓄電割合SOCが通常制御範囲の下限値より小さいときには、バッテリ50の充電を伴って退避走行する第1退避走行制御を優先的に選択する。これにより、バッテリ50の過放電を抑制することができる。しかも、第1温度差ΔTs1が値0に至るまでの第1退避走行制御と第2温度差ΔTs2が値0に至るまでの第2退避走行制御とを交互に切り替えて退避走行するから、退避走行距離をより長くすることができる。
実施例のハイブリッド自動車20では、HVユニット冷却装置60に異常が生じているときにバッテリ50の蓄電割合SOCが通常制御範囲内のときであって、第1温度差ΔTs1と第2温度差ΔTs2との少なくとも一方が閾値Trefより大きいときには、第2退避走行制御を選択した。しかし、まず、第1退避走行制御を選択するものとしてもよい。
実施例のハイブリッド自動車20では、HVユニット冷却装置60に異常が生じているときにバッテリ50の蓄電割合SOCが通常制御範囲の上限値より大きいときに第1退避走行制御が選択されたときには、第1温度差ΔTs1が値0に至るまで第1退避走行制御を継続して選択するものとした。しかし、バッテリ50の蓄電割合SOCが許容最大値Smaxに至ったときには、第1温度差ΔTs1が値0に至っていなくても第1退避走行制御を第2退避走行制御に切り替えるものとしてもよい。この場合の高SOC範囲退避走行制御の一例を図8に示す。第1退避走行制御が選択された以降は、バッテリ50の蓄電割合SOCが許容最大値Smax未満であるか否かを判定する(ステップS235)。バッテリ50の蓄電割合SOCが許容最大値Smax未満のときには、第1温度差ΔTs1が値0より大きいか否かを判定し(ステップS240)、第1温度差ΔTs1が値0より大きいときには、第1退避走行制御を選択し(ステップS250)、フラグFに値1をセットして(ステップS260)、本制御を終了する。したがって、バッテリ50の蓄電割合SOCが許容最大値Smax未満の状態では、第1温度差ΔTs1が値0に至るまで第1退避走行制御を継続して実行することになる。一方、第1温度差ΔTs1が値0に至るまえにバッテリ50の蓄電割合SOCが許容最大値Smaxに至ったときには、第2退避走行制御を選択し(ステップS220)、フラグFに値0をセットして(ステップS230)、本制御を終了する。こうした変形例の高SOC範囲退避走行制御を実行することにより、バッテリ50の蓄電割合SOCが許容最大値Smaxを超えるのを回避することができる。この結果、バッテリ50が過充電されるのを抑制することができる。
実施例のハイブリッド自動車20では、HVユニット冷却装置60に異常が生じているときにバッテリ50の蓄電割合SOCが通常制御範囲の下限値より小さいときに第2退避走行制御が選択されたときには、第2温度差ΔTs2が値0に至るまで第2退避走行制御を継続して選択するものとした。しかし、バッテリ50の蓄電割合SOCが許容最小値Sminに至ったときには、第2温度差ΔTs2が値0に至っていなくても第2退避走行制御を第1退避走行制御に切り替えるものとしてもよい。この場合の低SOC範囲退避走行制御の一例を図9に示す。第2退避走行制御が選択された以降は、バッテリ50の蓄電割合SOCが許容最小値Sminより大きいか否かを判定する(ステップS545)。バッテリ50の蓄電割合SOCが許容最小値Sminより大きいときには、第2温度差ΔTs2が値0より大きいか否かを判定し(ステップS550)、第2温度差ΔTs2が値0より大きいときには、第2退避走行制御を選択し(ステップS560)、フラグFに値0をセットして(ステップS570)、本制御を終了する。したがって、バッテリ50の蓄電割合SOCが許容最小値Smin未満の状態では、第2温度差ΔTs2が値0に至るまで第2退避走行制御を継続して実行することになる。一方、第2温度差ΔTs2が値0に至るまえにバッテリ50の蓄電割合SOCが許容最小値Sminに至ったときには、ステップS545で否定的判定がなされ、第1退避走行制御を選択し(ステップS530)、フラグFに値1をセットして(ステップS540)、本制御を終了する。こうした変形例の高SOC範囲退避走行制御を実行することにより、バッテリ50の蓄電割合SOCが許容最小値Smaxを下回るのを防止することができる。この結果、バッテリ50が過放電されるのを抑制することができる。
実施例のハイブリッド自動車20では、HVユニット冷却装置60に異常が生じているときに、第1退避走行制御を実行しているときにはインバータ42をシャットダウンし、第2退避走行制御を実行しているときにはインバータ41をシャットダウンした。しかし、第1退避走行制御を実行しているときにはインバータ42によりモータMG2のトルクが値0となるように制御し、第2退避走行制御を実行しているときにはインバータ41によりモータMG1のトルクが値0となるように制御するものとしてもよい。この場合でも、モータMG1とモータMG2の双方からトルク出力しているときに比して、インバータ41,42の素子温度Ts1,Ts2の上昇を抑制することができる。
実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係について説明する。実施例では、エンジン22が「エンジン」に相当し、モータMG1が「第1電動機」に相当し、インバータ41が「第1インバータ」に相当し、プラネタリギヤ30が「遊星歯車機構」に相当する。また、モータMG2が「第2電動機」に相当し、インバータ42が「第2インバータ」に相当し、バッテリ50が「バッテリ」に相当し、HVユニット冷却装置60が「冷却装置」に相当する。そして、HVECU70とエンジンECU24とモータECU40とバッテリECU52とが「退避走行制御手段」に相当する。
なお、実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係は、実施例が課題を解決するための手段の欄に記載した発明を実施するための形態を具体的に説明するための一例であることから、課題を解決するための手段の欄に記載した発明の要素を限定するものではない。即ち、課題を解決するための手段の欄に記載した発明についての解釈はその欄の記載に基づいて行なわれるべきものであり、実施例は課題を解決するための手段の欄に記載した発明の具体的な一例に過ぎないものである。
以上、本発明を実施するための形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において、種々なる形態で実施し得ることは勿論である。
本発明は、ハイブリッド自動車の製造産業などに利用可能である。
20 ハイブリッド自動車、22 エンジン、24 エンジン用電子制御ユニット(エンジンECU)、26 クランクシャフト、30 プラネタリギヤ、36 駆動軸、37 デファレンシャルギヤ、38a,38b 駆動輪、40 モータ用電子制御ユニット(モータECU)、41,42 インバータ、41a,42a 温度センサ、43,44 回転位置検出センサ、45,46 温度センサ、48 パワーコントロールユニット(CPU)、50 バッテリ、52 バッテリ用電子制御ユニット(バッテリECU)、54a 駆動電圧系電力ライン、54b 電池電圧系電力ライン、55 システムメインリレー、56 昇圧コンバータ、57 平滑コンデンサ、58 フィルタコンデンサ、59 放電抵抗、60 HVユニット冷却装置、62 ラジエータ、64 循環流路、66 電動ポンプ、66a 回転数センサ、69 温度センサ、70 ハイブリッド用電子制御ユニット(HVECU)、80 イグニッションスイッチ、81 シフトレバー、82 シフトポジションセンサ、83 アクセルペダル、84 アクセルペダルポジションセンサ、85 ブレーキペダル、86 ブレーキペダルポジションセンサ、88 車速センサ、MG1,MG2 モータ。
Claims (10)
- エンジンと、
動力を入出力可能な第1電動機と、
前記第1電動機を駆動する第1インバータと、
前記エンジンの出力軸と前記第1電動機の回転軸と車軸に連結された駆動軸の3軸に3つの回転要素が接続された遊星歯車機構と、
前記駆動軸に動力を入出力可能な第2電動機と、
前記第2電動機を駆動する第2インバータと、
前記第1電動機および前記第2電動機と前記第1インバータおよび前記第2インバータを介して電力のやりとりを行なうバッテリと、
少なくとも前記第1インバータおよび前記第2インバータを冷却する冷却装置と、
を備えるハイブリッド自動車であって、
前記冷却装置に異常が生じているときには、前記第1電動機に負荷率制限を課す第1負荷率制限温度から前記第1インバータの素子温度を減じた第1温度差と、前記第2電動機に負荷率制限を課す第2負荷率制限温度から前記第2インバータの素子温度を減じた第2温度差と、前記バッテリの全蓄電容量に対する残存する蓄電容量の割合としての蓄電割合と、に基づいて、前記第2電動機からの動力を用いずに前記エンジンと前記第1電動機とからの動力で走行するよう前記エンジンと前記第1電動機と前記第2電動機とを制御する第1退避走行制御と、前記エンジンおよび前記第1電動機からの動力を用いずに前記第2電動機からの動力で走行するよう前記エンジンと前記第1電動機と前記第2電動機とを制御する第2退避走行制御と、を切り替えて実行する退避走行制御手段、
を備えることを特徴とするハイブリッド自動車。 - 請求項1記載のハイブリッド自動車であって、
前記退避走行制御手段は、前記第1退避走行制御を実行している最中は前記第2インバータをシャットダウンし、前記第2退避走行制御を実行している最中は前記第1インバータをシャットダウンする手段である、
ハイブリッド自動車。 - 請求項1または2記載のハイブリッド自動車であって、
前記退避走行制御手段は、前記蓄電割合が通常制御範囲の上限値より大きいときには、前記第2退避走行制御を前記第1退避走行制御に優先して実行する手段である、
ハイブリッド自動車。 - 請求項3記載のハイブリッド自動車であって、
前記退避走行制御手段は、前記蓄電割合が通常制御範囲の上限値より大きいときには、前記第1温度差が第1閾値に至るまでの前記第1退避走行制御と、前記第2温度差が前記第1閾値に至るまでの前記第2退避走行制御と、を切り替えて実行する手段である、
ハイブリッド自動車。 - 請求項4記載のハイブリッド自動車であって、
前記退避走行制御手段は、前記第1退避走行制御を実行している最中に前記蓄電割合が予め定めた許容最大値に至ったときには、前記第1温度差に拘わらずに前記第1退避走行制御から前記第2退避走行制御に切り替える手段である、
ハイブリッド自動車。 - 請求項1ないし5のうちのいずれか1つの請求項に記載のハイブリッド自動車であって、
前記退避走行制御手段は、前記蓄電割合が通常制御範囲内のときに前記第1温度差と前記第2温度差との一方が第2閾値より大きいときには、前記第2温度差が前記第2閾値に至るまでの前記第2退避走行制御と、前記第2温度差が前記第2閾値に至るまでの前記第1退避走行制御と、を切り替えて実行する手段である、
ハイブリッド自動車。 - 請求項6記載のハイブリッド自動車であって、
前記退避走行制御手段は、前記蓄電割合が前記通常制御範囲内のときに前記第1温度差および前記第2温度差が前記第2閾値以下のときには、前記第2温度差が前記第2閾値より小さい第3閾値に至るまでの前記第1退避走行制御と、前記第2温度差が前記第3閾値に至るまでの前記第2退避走行制御と、を切り替えて実行する手段である、
ハイブリッド自動車。 - 請求項1ないし7のうちのいずれか1つの請求項に記載のハイブリッド自動車であって、
前記退避走行制御手段は、前記蓄電割合が通常制御範囲の下限値より小さいときには、前記第1退避走行制御を前記第2退避走行制御に優先して実行する手段である、
ハイブリッド自動車。 - 請求項8記載のハイブリッド自動車であって、
前記退避走行制御手段は、前記蓄電割合が通常制御範囲の下限値より小さいときには、前記第1温度差が第4閾値に至るまでの前記第1退避走行制御と、前記第2温度差が前記第4閾値に至るまでの前記第2退避走行制御と、を切り替えて実行する手段である、
ハイブリッド自動車。 - 請求項9記載のハイブリッド自動車であって、
前記退避走行制御手段は、前記第2退避走行制御を実行している最中に前記蓄電割合が予め定めた許容最小値に至ったときには、前記第2温度差に拘わらずに前記第2退避走行制御から前記第1退避走行制御に切り替える手段である、
ハイブリッド自動車。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015062375A JP6128155B2 (ja) | 2015-03-25 | 2015-03-25 | ハイブリッド自動車 |
| US15/073,975 US9527507B2 (en) | 2015-03-25 | 2016-03-18 | Hybrid vehicle |
| CN201610169306.9A CN106004869B (zh) | 2015-03-25 | 2016-03-23 | 混合动力车辆 |
| DE102016105395.3A DE102016105395B4 (de) | 2015-03-25 | 2016-03-23 | Hybridfahrzeug |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015062375A JP6128155B2 (ja) | 2015-03-25 | 2015-03-25 | ハイブリッド自動車 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016179785A JP2016179785A (ja) | 2016-10-13 |
| JP6128155B2 true JP6128155B2 (ja) | 2017-05-17 |
Family
ID=56890327
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015062375A Expired - Fee Related JP6128155B2 (ja) | 2015-03-25 | 2015-03-25 | ハイブリッド自動車 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9527507B2 (ja) |
| JP (1) | JP6128155B2 (ja) |
| CN (1) | CN106004869B (ja) |
| DE (1) | DE102016105395B4 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6451726B2 (ja) * | 2016-12-07 | 2019-01-16 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| JP6617693B2 (ja) * | 2016-12-09 | 2019-12-11 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP6809354B2 (ja) * | 2017-04-18 | 2021-01-06 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| JP6772947B2 (ja) * | 2017-04-27 | 2020-10-21 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| US10633104B2 (en) | 2017-05-17 | 2020-04-28 | General Electric Company | Hybrid-electric propulsion system for an aircraft |
| JP6888512B2 (ja) * | 2017-10-16 | 2021-06-16 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| JP7227553B2 (ja) * | 2018-08-27 | 2023-02-22 | 三菱自動車工業株式会社 | 電池冷却制御装置 |
| EP3875300A1 (en) * | 2020-03-06 | 2021-09-08 | Volvo Car Corporation | Limp home mode for a battery electric vehicle |
| JP7400685B2 (ja) * | 2020-10-09 | 2023-12-19 | トヨタ自動車株式会社 | 車両の制御装置 |
| US20230415568A1 (en) * | 2022-06-27 | 2023-12-28 | Amos Power, Inc. | Electric driven pto |
| JP7819656B2 (ja) * | 2023-03-08 | 2026-02-25 | トヨタ自動車株式会社 | 電動車 |
| CN116749978B (zh) * | 2023-07-27 | 2025-08-12 | 重庆赛力斯凤凰智创科技有限公司 | 车辆跛行行驶的控制方法、装置、电子设备及存储介质 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4015923B2 (ja) | 2002-11-06 | 2007-11-28 | 日産自動車株式会社 | ハイブリッドシステムのフェイル対応制御装置 |
| JP4283615B2 (ja) * | 2003-08-14 | 2009-06-24 | パナソニックEvエナジー株式会社 | 二次電池の電圧補正方法および装置、並びに二次電池の残存容量推定方法および装置 |
| JP4055003B2 (ja) | 2003-09-04 | 2008-03-05 | アイシン・エィ・ダブリュ株式会社 | 車両を駆動するモータの制御装置 |
| JP2005083300A (ja) | 2003-09-10 | 2005-03-31 | Nissan Motor Co Ltd | ハイブリッド車両の制御装置 |
| JP2007203883A (ja) | 2006-02-02 | 2007-08-16 | Nissan Motor Co Ltd | 車両のフェイルセーフ走行制御システム |
| JP4622884B2 (ja) * | 2006-02-06 | 2011-02-02 | トヨタ自動車株式会社 | 電動機駆動装置およびそれを備えたハイブリッド自動車ならびに電力変換装置の停止制御方法 |
| JP2009171766A (ja) * | 2008-01-17 | 2009-07-30 | Toyota Motor Corp | 車両駆動システムおよびそれを備える車両 |
| JP2009254178A (ja) | 2008-04-09 | 2009-10-29 | Nissan Motor Co Ltd | 車両駆動装置 |
| JP2009284597A (ja) * | 2008-05-20 | 2009-12-03 | Toyota Motor Corp | パワーコントロールユニットの冷却装置 |
| JP2009298373A (ja) * | 2008-06-17 | 2009-12-24 | Toyota Motor Corp | ハイブリッド自動車およびその制御方法 |
| JP5077162B2 (ja) * | 2008-09-11 | 2012-11-21 | トヨタ自動車株式会社 | 駆動装置およびその制御方法並びに車両 |
| JP2010124628A (ja) | 2008-11-20 | 2010-06-03 | Toyota Motor Corp | モータを搭載する車両 |
| FR2942080B1 (fr) * | 2009-02-09 | 2011-04-01 | Vehicules Electr Soc D | Procede de gestion thermique d'une batterie electrique |
| WO2012124073A1 (ja) | 2011-03-16 | 2012-09-20 | トヨタ自動車株式会社 | インバータの過熱保護制御装置およびインバータの過熱保護制御方法 |
| CN103547472B (zh) * | 2011-05-16 | 2015-09-30 | 丰田自动车株式会社 | 电动车辆 |
| CN103650332B (zh) * | 2011-07-12 | 2015-12-02 | 丰田自动车株式会社 | 车辆和车辆的控制方法 |
| DE102012008254B4 (de) | 2012-04-25 | 2015-11-12 | Audi Ag | Verfahren zum Betreiben einer Antriebseinrichtung eines Kraftfahrzeugs sowie entsprechende Antriebseinrichtung |
| CN103178597B (zh) * | 2013-02-06 | 2015-02-04 | 潍柴动力股份有限公司 | 一种电源模组系统及失效模块电能补偿方法 |
| CN103730700B (zh) * | 2013-11-08 | 2016-02-24 | 天津力神电池股份有限公司 | 一种动力电池系统对采样线束故障的判定和处理方法 |
| US9481354B2 (en) * | 2014-05-08 | 2016-11-01 | Hyundai Motor Company | Emergency operation method of hybrid vehicle |
| US9205834B1 (en) * | 2014-06-27 | 2015-12-08 | Toyota Motor Engineering & Manufacturing North America, Inc. | Reconfigurable system with minimum mobility mode |
-
2015
- 2015-03-25 JP JP2015062375A patent/JP6128155B2/ja not_active Expired - Fee Related
-
2016
- 2016-03-18 US US15/073,975 patent/US9527507B2/en not_active Expired - Fee Related
- 2016-03-23 DE DE102016105395.3A patent/DE102016105395B4/de active Active
- 2016-03-23 CN CN201610169306.9A patent/CN106004869B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US9527507B2 (en) | 2016-12-27 |
| DE102016105395B4 (de) | 2024-02-08 |
| DE102016105395A1 (de) | 2016-09-29 |
| US20160280218A1 (en) | 2016-09-29 |
| JP2016179785A (ja) | 2016-10-13 |
| CN106004869B (zh) | 2018-11-23 |
| CN106004869A (zh) | 2016-10-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6128155B2 (ja) | ハイブリッド自動車 | |
| JP6172114B2 (ja) | ハイブリッド自動車 | |
| CN101663187B (zh) | 车辆及其控制方法 | |
| JP5133609B2 (ja) | 車両及びその制御方法 | |
| US9682693B2 (en) | Hybrid vehicle | |
| JP6354713B2 (ja) | ハイブリッド自動車 | |
| EP3366508A1 (en) | Hybrid vehicle | |
| JP2010163061A (ja) | 動力出力装置、それを備えた車両および動力出力装置の制御方法 | |
| JP6424843B2 (ja) | ハイブリッド自動車 | |
| JP2021084537A (ja) | ハイブリッド車両 | |
| JP6428526B2 (ja) | ハイブリッド自動車 | |
| JP2013095147A (ja) | ハイブリッド自動車 | |
| JP2009298373A (ja) | ハイブリッド自動車およびその制御方法 | |
| JP5131176B2 (ja) | 動力出力装置および車両並びに異常判定方法 | |
| JP5074932B2 (ja) | 車両および駆動装置並びにこれらの制御方法 | |
| JP5842730B2 (ja) | ハイブリッド自動車 | |
| JP6094301B2 (ja) | ハイブリッド自動車 | |
| JP6740944B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2016132263A (ja) | ハイブリッド自動車 | |
| JP2014183718A (ja) | 駆動装置およびこれを搭載する車両 | |
| JP2012096584A (ja) | ハイブリッド自動車 | |
| JP2017128212A (ja) | ハイブリッド自動車 | |
| JP2016084062A (ja) | ハイブリッド自動車 | |
| JP6591872B2 (ja) | 自動車 | |
| JP6769366B2 (ja) | ハイブリッド車両の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170314 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170327 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6128155 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |